Перекрестная ссылка на родственные заявки
По настоящей патентной заявке испрашивается приоритет находящейся на рассмотрении предварительной патентной заявки США 61/508734 под названием "INJECTION SYSTEM WITH CAPACITIVE SENSING", поданной 18 июля 2011 г, содержание которой во всей полноте включено в настоящую заявку посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится главным образом к системам инъекции, более конкретно, к детектированию жидкости в шприце, используемом в указанной системе инъекции.
Предшествующий уровень техники
Для проведения различных медицинских процедур требуется введение пациенту одной или нескольких медицинских жидкостей. Например, процедуры получения медицинских изображений часто предусматривают введение пациенту контрастных веществ, возможно, вместе с физиологическим раствором и/или другими жидкостями. Другие медицинские процедуры предусматривают введение пациенту одной или нескольких жидкостей в терапевтических целях. Для применения в этих целях могут использоваться автоматические инжекторы.
Автоматический инжектор обычно содержит так называемую силовую головку. На силовой головке различными способами (например, с возможностью отсоединения; с задней загрузкой, с передней загрузкой, с боковой загрузкой) может быть установлен один или несколько шприцев. Каждый шприц обычно содержит элемент, который может быть определен как плунжер, поршень и т.п. Каждый такой плунжер шприца сконструирован для взаимодействия (например, контакта и/или временного соединения) с соответствующим приводным механизмом плунжера шприца, который помещается в силовой головке, и под действием приводного механизма соответствующий плунжер шприца продвигается в осевом направлении внутри и относительно цилиндра шприца. Один из типичных приводных механизмов плунжера шприца представляет собой толкатель, установленный на резьбовом направляющем или подающем винте. При повороте подающего винта в одном направлении вращения соответствующий толкатель продвигается в одном осевом направлении, а при повороте подающего винта в противоположном направлении вращения соответствующий толкатель продвигается в противоположном осевом направлении.
Краткое изложение сущности изобретения
Каждая из особенностей настоящего изобретения с первой по четвертую воплощена в системе инъекции. Система инъекции содержит устройство инъекции и зону цилиндра шприца. Система инъекции дополнительно содержит емкостной детектор жидкости. Система инъекции способна удерживать шприц таким образом, чтобы цилиндр шприца и зона цилиндра шприца имели одинаковую протяженность. Зона цилиндра шприца дополнительно имеет длину, совпадающую с длиной цилиндра шприца, когда устройство инъекции удерживает шприц. Зона цилиндра шприца дополнительно имеет продольную ось, совпадающую с продольной осью цилиндра шприца, когда устройство инъекции удерживает шприц.
В соответствии с первой особенностью емкостной детектор жидкости размещается внутри устройства инъекции. Электрическое поле емкостного детектора жидкости проникает в зону цилиндра шприца по меньшей мере в первом положении и во втором положении вдоль продольной оси зоны цилиндра шприца. Первое положение отстоит от второго положения на первое расстояние, равное по меньшей мере половине длины зоны цилиндра шприца.
В соответствии со второй особенностью емкостной детектор жидкости размещается внутри устройства инъекции, а электрическое поле емкостного детектора жидкости проникает в зону цилиндра шприца по меньшей мере в первом положении и во втором положении вдоль продольной оси зоны цилиндра шприца. Первое положение отстоит от второго положения на первое расстояние, равное по меньшей мере половине длины зоны цилиндра шприца. Согласно второй особенности емкостной детектор жидкости содержит первый конденсатор. Первый конденсатор имеет первый протяженный электрод и второй протяженный электрод. Электрическое поле первого конденсатора проникает в зону цилиндра шприца по меньшей мере в первом положении и во втором положении.
В соответствии с третьей особенностью емкостной детектор жидкости размещается внутри устройства устройство инъекции. Емкостной детектор жидкости содержит первый конденсатор и второй конденсатор. Электрическое поле первого конденсатора проникает в зону цилиндра шприца в первом положении вдоль продольной оси зоны цилиндра шприца. Электрическое поле второго конденсатора проникает в зону цилиндра шприца в первом положении вдоль продольной оси зоны цилиндра шприца.
В соответствии с четвертой особенностью система инъекции содержит шприц, установленный в устройстве инъекции. Шприц содержит цилиндр. Цилиндр шприца имеет длину вдоль продольной оси. На протяжении цилиндра шприца размещается емкостной детектор жидкости. Емкостной детектор жидкости содержит множество конденсаторов, последовательно размещенных по длине цилиндра шприца. Каждый из множества конденсаторов размещается в отличающемся положении вдоль продольной оси цилиндра шприца. Зона цилиндра шприца имеет длину, совпадающую с длиной цилиндра шприца, и продольную ось, совпадающую с продольной осью цилиндра шприца
К каждой из рассмотренных выше первой, второй, третьей и четвертой особенностей настоящего изобретения применим ряд уточненных и дополнительных признаков. Эти уточненные и дополнительные признаки могут быть реализованы по отдельности или в любом сочетании применительно к каждой из первой, второй, третьей и четвертой особенностей. По существу, каждый из следующих признаков, который будет рассмотрен, может, но необязательно должен использоваться с каким-либо другим признаком или сочетанием признаков согласно каждой из первой, второй, третьей и четвертой особенностей. Следующее далее описание вплоть до начала описания пятой особенности настоящего изобретения применимо к каждой из первой, второй, третьей и четвертой особенностей.
Как было указано, согласно четвертой особенности множество конденсаторов последовательно расположены по длине цилиндра шприца (например, разнесены по длине цилиндра шприца). Кроме того, согласно первой и третьей особенностям множество конденсаторов могут быть последовательно расположены по длине зоны цилиндра шприца. В таких конструкциях с множеством конденсаторов, последовательно расположенных по длине зоны цилиндра шприца, емкостной детектор жидкости может содержать по меньшей мере восемь конденсаторов, последовательно расположенных по длине зоны цилиндра шприца. Каждый из множества конденсаторов может иметь пару электродов, при этом каждый электрод из пары электродов может размещаться таким образом, чтобы вектор, перпендикулярный электроду и пересекающий его, не пересекал какой-либо другой электрод (например, другой электрод из пары электродов и/или какой-либо электрод какого-либо другого конденсатора из множества конденсаторов). В одной из конструкций каждая пара электродов множества конденсаторов может лежать преимущественно в одной плоскости.
В конструкциях с множеством конденсаторов, последовательно расположенных по длине зоны цилиндра шприца, каждый из множества конденсаторов может быть соединен с интегральной схемой. Интегральная схема может быть рассчитана на обеспечение двухрежимного выходного сигнала для каждого из множества конденсаторов. Первый режим двухрежимного выходного сигнала может являться реакцией на присутствие жидкости, а второй режим двухрежимного выходного сигнала может являться реакцией на отсутствие жидкости. В связи с этим конденсаторы могут считаться распознающими присутствие жидкости, отсутствие жидкости (например, распознающими воздух и/или вакуум) или то и другое. В другой конструкции каждый из множества конденсаторов может быть рассчитан на обеспечение аналогового выходного сигнала, который изменяется в зависимости от количества жидкости в электрическом поле конденсатора. Система инъекции может дополнительно содержать логическую схему для определения уровня жидкости, способную определять уровень жидкости в зоне цилиндра шприца по меньшей мере частично на основе выходных сигналов множества конденсаторов.
В одном из вариантов осуществления второй особенности первый и второй протяженные электроды могут размещаться таким образом, что вектор, перпендикулярный первому протяженному электроду и пересекающий его, не пересекает второй протяженный электрод. Первый протяженный электрод может лежать преимущественно в одной плоскости со вторым протяженным электродом. Первый и второй протяженные электроды могут являться протяженными в направлении, параллельном продольной оси зоны цилиндра шприца. Первый конденсатор может быть способен обеспечивать аналоговый выходной сигнал в ответ на присутствие жидкости в зоне цилиндра шприца. На основании аналогового выходного сигнала может определяться объем жидкости в зоне цилиндра шприца. В одном из вариантов осуществления второй особенности также может быть предусмотрена логическая схема для определения уровня жидкости, способная определять уровень жидкости в зоне цилиндра шприца по меньшей мере частично на основании выходного сигнала первого конденсатора.
В одном из вариантов осуществления с первой по четвертую особенностей система инъекции может дополнительно содержать логическую схему для определения воздействий со стороны пользователя, способную определять воздействие со стороны пользователя по меньшей мере частично на основании выходного сигнала емкостного детектора жидкости. По существу, емкостной детектор жидкости может быть способен определять как уровень жидкости в шприце, так и воздействие со стороны пользователя. Таким воздействием со стороны пользователя может являться перемещение пальца пользователя по шприцу, установленному в устройстве инъекции.
Система инъекции может дополнительно содержать емкостный детектор воздействий со стороны пользователя, электрическое поле которого проникает в первую область вблизи зоны цилиндра шприца. Когда палец пользователя находится в первой области, электрическое поле емкостного детектора воздействий со стороны пользователя может изменяться, и на основании такого изменения логическая схема для определения воздействия может быть способна определять воздействие со стороны пользователя. В одной из конструкций электрическое поле емкостного детектора воздействий со стороны пользователя может проникать во вторую область вблизи зоны цилиндра шприца, которая может находиться на стороне зоны цилиндра шприца, противоположной первой области. В такой конструкции, емкостный детектор воздействий со стороны пользователя может быть способен распознавать пальцы, находящиеся в первой и второй областях с любой стороны зоны цилиндра шприца.
Пятая особенность воплощена в способе эксплуатации системы инъекции. В этом способе устанавливают шприц в устройство инъекции и затем перемещают толкатель устройства инъекции, чтобы обеспечить соответствующее перемещение плунжера шприца. Способ включает введение плунжера в контакт с толкателем. Стадия перемещения осуществляется, когда толкатель соприкасается с плунжером. Кроме того, на стадии перемещения множество раз осуществляется определение емкостными датчиками присутствия жидкости в цилиндре шприца. При каждом из определений присутствия оценивается объем жидкости в шприце. Оценка по меньшей мере частично основана на результатах измерения емкостными датчиками.
К рассмотренной выше пятой особенности настоящего изобретения применим ряд уточненных и дополнительных признаков. Эти уточненные и дополнительные признаки могут быть реализованы по отдельности или в любом сочетании применительно к пятой особенности. По существу, каждый из следующих признаков, который будет рассмотрен, может, но необязательно должен использоваться с каким-либо другим признаком или сочетанием признаков согласно пятой особенности. Следующее далее описание вплоть до начала описания шестой особенности настоящего изобретения применимо к пятой особенности.
Перемещение может включать втягивание и/или продвижение плунжера. В каждый из множества раз толкатель может находиться в однозначно определяемом местоположении. В одной из конфигураций стадии измерения емкостными датчиками и оценки могут непрерывно осуществляться на стадии перемещения. Способ может дополнительно включать стадии втягивания жидкости шприц на стадии перемещения и проверки для каждого из множества раз соответствия расчетного объема жидкости объему шприца между головкой шприца и плунжером. Способ также может дополнительно включать продвижение плунжера с целью инъекции жидкости пациенту.
Способ может дополнительно включать измерение емкостными датчиками пальца пользователя вблизи цилиндра шприца и интерпретацию системой инъекции измерения емкостными датчиками как воздействия на систему инъекции со стороны пользователя. В одной из разновидностей способ может включать измерение емкостными датчиками двух пальцев пользователя, перемещающихся с противоположных сторон цилиндра шприца. Такое измерение емкостными датчиками может интерпретироваться системой инъекции как входная команда очистки цилиндра шприца.
Шестая особенность воплощена в способе эксплуатации системы инъекции. В этом способе устанавливают шприц в устройство инъекции и затем распознают жидкость в цилиндре шприца. Измерение осуществляют с помощью первого, второго и третьего емкостных датчиков. В процессе измерения емкостными датчиками обнаруживают ошибочные показания по меньшей мере частично путем сравнения выходных сигналов первого, второго и третьего емкостных датчиков, зарегистрированных на стадии измерения. В одном из вариантов осуществления шестой особенности на основе стадий измерения и обнаружения может оцениваться общий объем жидкости в шприце.
Седьмая особенность воплощена в способе эксплуатации системы инъекции. В этом способе устанавливают шприц в устройство инъекции и с помощью первой части множества емкостных датчиков распознают присутствие жидкости в установленном шприце.
К рассмотренной выше седьмой особенности настоящего изобретения применим ряд уточненных и дополнительных признаков. Эти уточненные и дополнительные признаки могут быть реализованы по отдельности или в любом сочетании применительно к седьмой особенности. По существу, каждый из следующих признаков, который будет рассмотрен, может, но необязательно должен использоваться с каким-либо другим признаком или сочетанием признаков согласно седьмой особенности. Следующее далее описание вплоть до начала описания восьмой особенности настоящего изобретения применимо к седьмой особенности.
Способ может дополнительно включать определение отсутствия жидкости в установленном шприце с помощью второй части множества емкостных датчиков и оценку общего объема жидкости в шприце на основании по меньшей мере одной из стадий измерения (например, определения присутствия жидкости и/или определения отсутствия жидкости). Стадия оценки может включать вычисление процентного заполнения шприца на основании числа емкостных датчиков в первой части и/или числа емкостных датчиков во второй части. В одной из конструкций стадия оценки может включать проверку общего объема жидкости по справочной таблице. В такой конструкции в справочной таблице могут содержаться значения общего объема жидкости, соответствующие числу нескольких емкостных датчиков, входящих в первую и/или вторую части.
На стадии установки в шприце может содержаться общий объем жидкости, а до инъекции пациенту какой-либо жидкости из шприца может осуществляться по меньшей мере одна из стадий измерения. Соответственно, шприцем может являться предварительно наполненный шприц. Кроме того, способ может дополнительно включать ввод в систему инъекции значения, соответствующего общему объему жидкости, и проверку соответствия общего объема жидкости введенному значению. Стадия ввода может включать ввод вручную значения, соответствующего общему объему жидкости, сканирование машиночитаемой маркировки на шприце и/или считывание радиометки, соответствующей общему объему жидкости.
Восьмая особенность воплощена в способе эксплуатации системы инъекции. В этом способе устанавливают шприц в устройство инъекции и затем определяют емкостными датчиками присутствие пальца пользователя вблизи шприца. Затем с помощью системы инъекции интерпретируют результаты измерения емкостными датчиками как воздействие на систему инъекции со стороны пользователя.
Девятая особенность воплощена в системе инъекции. Система инъекции содержит устройство инъекции и зону цилиндра шприца. Система инъекции дополнительно содержит емкостный детектор и логическую схему для определения воздействий со стороны пользователя. Система инъекции способна удерживать шприц таким образом, чтобы цилиндр шприца имел одинаковую протяженность с зоной цилиндра шприца. Зона цилиндра шприца дополнительно имеет длину, совпадающую с длиной цилиндра шприца, когда устройство инъекции удерживает шприц. Зона цилиндра шприца дополнительно содержит продольную ось зоны цилиндра шприца, совпадающую с продольной осью цилиндра шприца, когда устройство инъекции удерживает шприц. Устройство инъекции содержит емкостный детектор. Электрическое поле емкостного детектор проникает в первую область вблизи зоны цилиндра шприца. Логическая схема для определения воздействий со стороны пользователя способна определять воздействие со стороны пользователя по меньшей мере частично на основании выходного сигнала емкостного детектора.
К рассмотренной выше девятой особенности настоящего изобретения применим ряд уточненных и дополнительных признаков. Эти уточненные и дополнительные признаки могут быть реализованы по отдельности или в любом сочетании применительно к девятой особенности. По существу, каждый из следующих признаков, который будет рассмотрен, может, но необязательно должен использоваться с каким-либо другим признаком или сочетанием признаков согласно девятой особенности. Следующее далее описание вплоть до начала описания термина "взаимосвязанный с возможностью движения жидкости" применимо к девятой особенности.
Электрическое поле емкостного детектора может проникать во вторую область вблизи зоны цилиндра шприца на стороне зоны цилиндра шприца, противоположной первой области. В такой конструкции логическая схема для определения воздействий со стороны пользователя может быть способна отличать воздействие со стороны пользователя в первой области от воздействия во второй области, например, логическая схема для определения воздействий со стороны пользователя может быть способна различать, с какой стороны зоны цилиндра шприца находится палец пользователя. Первая и вторая области могут проходить преимущество по всей длине зоны цилиндра шприца, а логическая схема для определения воздействий со стороны пользователя может быть способна определять, что пальцы пользователя перемещаются в первой и второй областях по длине зоны цилиндра шприца.
Используемый термин "взаимосвязанный с возможностью движения жидкости" означает, что два или более компонентов или объектов соединены (непосредственно или опосредованно) таким образом, что по заданному пути между ними может протекать (например, в одном направлении или в двух направлениях) жидкость. Например, "устройство инъекции, взаимосвязанное с возможностью движения жидкости с пациентом" означает конфигурацию, в которой жидкость способна вытекать из устройства инъекции через соединительные устройства (например, систему трубок, соединители) и поступать в организм пациента (например, в сосудистую сеть пациента).
Используемый термин "соединенные с возможностью разъединения" описывает взаимосвязь между компонентами, которые, будучи связанными, сохраняют способность отсоединяться друг от друга, при этом после отсоединения по меньшей мере один из компонентов остается в работоспособном состоянии. Например, "кассета и модуль-держатель контейнера с жидкостью связаны с возможностью разъединения" описывает состояние, в котором кассета в данный момент соединена с модулем-держателем контейнера с жидкостью с возможностью отсоединения от модуля-держателя контейнера с жидкостью. Кроме того, после такого отсоединения, по меньшей мере модуль-держатель контейнера с жидкостью или кассета сохраняют способность к взаимному соединению (например, разъемному) с другим компонентом.
К каждой из рассмотренных выше первой, второй, третьей, четвертой, пятой, шестой, седьмой, восьмой и девятой особенностям настоящего изобретения отдельно применим ряд уточненных и дополнительных признаков. Эти уточненные и дополнительные могут быть реализованы по отдельности или в любом сочетании применительно к первой, второй, третьей, четвертой, пятой, шестой, седьмой, восьмой и девятой особенностям. Любой признак любой из различных особенностей настоящего изобретения, который предположительно ограничен контекстом единственного числа и т.п., сопровождается в описании такими терминами, как "исключительно", "единственно", "ограниченный" и т.п. Простое упоминание признака в соответствии с общепринятой практикой предшествования не ограничивает соответствующий признак единственным числом (например, если указано, что автоматический инжектор содержит только "шприц", не означает, что автоматический инжектор содержит только один шприц). Кроме того, отсутствие такого оборота, как "по меньшей мере один", также не ограничивает соответствующий признак единственным числом (если указано, что автоматический инжектор содержит только "шприц", не означает, что автоматический инжектор содержит только один шприц). Наконец, оборот "по меньшей мере в целом" и т.п., используемый применительно к конкретному признаку, подразумевает соответствующую характеристику и ее незначительные разновидности (например, если указано, что корпус шприца является по меньшей мере в целом цилиндрическим, подразумевается, что корпус шприца является цилиндрическим).
Любая "логическая схема", которая может использоваться в любой из различных особенностей настоящего изобретения, может быть реализована любым применимым способом, в том числе без ограничения в любом применимом программном обеспечении, программно-аппаратном обеспечении или аппаратном обеспечении с использованием одной или несколько платформ, одного или нескольких процессоров, памяти любого применимого типа, любого одного компьютера любого применимого типа или множества компьютеров любого применимого типа, соединенных любым применимым способом, или любого их сочетания. Эта логическая схема может быть реализована в любом одном местоположении или множестве местоположений, соединенных любым применимым способом (например, посредством сети любого типа).
Любой автоматический инжектор, который может использоваться для выпуска жидкости, может иметь любой применимый размер, форму, конфигурацию и/или тип. В любом таком автоматическим инжекторе может использоваться один или несколько приводных механизмов плунжера шприца любого применимого размера, формы, конфигурации и/или типа, при этом каждый такой приводной механизм способен перемещаться по меньшей мере в двух направлениях (например, в первом направлении для выпуска жидкости; во втором направлении для загрузки и/или втягивания жидкости и/или возврата в положение для последующего выпуска жидкости) и может любым применимым способом взаимодействовать с соответствующим плунжером шприца (например, путем механического контакта; путем применимого соединения (механического или иного)) с тем, чтобы продвигать плунжер шприца по меньшей мере в одном направлении (например, для выпуска жидкости). В каждом приводном механизме плунжера шприца может использоваться один или несколько источников приводного механизма любого применимого размера, формы, конфигурации и/или типа. Выходные сигналы множества источников приводного механизма могут быть объединены любым применимым способом с целью продвижения плунжера шприца в заданное время. Один или несколько источников приводного механизма могут быть закреплены за одним из приводных механизмов плунжера шприца, связаны с множеством приводных механизмов (например, посредством своего рода трансмиссии для переключения выходного сигнала с одного плунжера шприца на другой плунжер шприца) и могут использоваться сочетание того и другого. Типичные формы источников приводного механизма включают щеточный или бесщеточный электродвигатель, гидравлический двигатель, пневмодвигатель, пьезоэлектрический двигатель или шаговый двигатель.
Любой такой автоматический инжектор может иметь любое соответствующее применение там, где желательна доставка одной или нескольких медицинских жидкостей, включая без ограничения любое соответствующее медицинское применение в целях формирования изображений (например, компьютерную томографию (КТ); магнитно-резонансную томографию (МРТ); однофотонную эмиссионную компьютерную томографию (ОФЭКТ); позитронную эмиссионную томографию (ПЭТ); рентгенографию; ангиографию; формирование оптических изображений; формирование ультразвуковых изображений). Любой такой автоматический инжектор может использоваться с любым компонентом или сочетанием компонентов, таким как применимая система формирования изображений (например, КТ-сканер). Например, между любым таким автоматическим инжектором и одним или несколькими компонентами может передаваться информация (например, информация о задержке сканирования, сигналах начала инъекции, скорости инъекции).
С любым таким автоматическим инжектором может любым применимым способом (например, съемно; с задней стороны; с передней стороны; сбоку) использоваться любое число применимых шприцев, из заданного шприца любого такого автоматического инжектора может выпускаться любая применимая медицинская жидкость (например, контрастное вещество, радиоактивный медицинский препарат, физиологический раствор и любое их сочетание), и из автоматического инжектора с множеством шприцев любым применимым способом (например, последовательно, одновременно) может выпускаться любая приемлемая жидкость, или может использоваться любое сочетание перечисленного. В одном из вариантов осуществления настоящего изобретения жидкость, выпущенная из шприца при срабатывании автоматического инжектора, направляется в трубопровод (например, комплект медицинских трубок), который с возможностью движения жидкости любым применимым способом связан со шприцем и по которому жидкость направляется в желаемое местоположение (например, в катетер, который вводят пациенту для инъекции). Содержимое множества шприцев может выпускаться в общий трубопровод (например, для доставки к единому месту инъекции), или содержимое одного шприца может выпускаться в один трубопровод (например, для доставки к одному месту инъекции), а содержимое другого шприца может выпускаться в другой трубопровод (например, для доставки к другому месту инъекции). В одном из вариантов осуществления каждый шприц содержит цилиндр и плунжер, который находится внутри цилиндра и перемещается относительно него. Этот плунжер может взаимодействовать с используемым в автоматическим инжекторе узлом приводного механизма плунжера шприца таким образом, чтобы узел приводного механизма плунжера шприца был способен продвигать плунжер по меньшей мере в одном направлении и, возможно, в двух различных противоположных направлениях.
Краткое описание чертежей
На Фиг.1 схематически проиллюстрирован один из вариантов осуществления автоматического инжектора,
на Фиг.2А показан вид в перспективе одного из вариантов осуществления портативного установленного на стойке автоматического инжектора с двойной головкой,
на Фиг.2Б показан увеличенный вид в перспективе с частичным изображением по частям силовой головки, используемой в автоматическом инжекторе, проиллюстрированном на Фиг.2А,
на Фиг.2В схематически проиллюстрирован один из вариантов осуществления узла приводного механизма плунжера шприца, используемого в автоматическом инжекторе, проиллюстрированном на фиг.2А,
на Фиг.3А схематически проиллюстрирован корпус шприца, в котором размещается емкостной детектор жидкости,
на Фиг.3Б схематически проиллюстрирован вид в поперечном разрезе (вид с торца) проиллюстрированного на Фиг.3А корпуса шприца и шприца,
на Фиг.3В схематически проиллюстрирован вид сбоку проиллюстрированного на Фиг.3А корпуса шприца и емкостного детектора жидкости с другим установленным в нем шприцем,
на Фиг.4А схематически проиллюстрирован вид сверху шприца, установленного в корпусе шприца, в котором размещается емкостной детектор жидкости,
на Фиг.4Б схематически проиллюстрирован вид в поперечном разрезе (вид с торца) проиллюстрированного на Фиг.4А корпуса шприца и шприца,
на Фиг.5А и 5Б показаны виды в поперечном разрезе (виды с торца) альтернативных вариантов осуществления шприца и корпуса шприца, в котором размещается емкостной детектор жидкости,
на Фиг.6 показана диаграмма, иллюстрирующая событие шума в конденсаторе емкостного детектора жидкости,
на Фиг.7 показана диаграмма, иллюстрирующая измеренную емкость в зависимости от времени на протяжении периода изменения объема жидкости в шприце,
на Фиг.8 схематически проиллюстрирован пользователь, два пальца которого перемещаются по цилиндру шприца,
на Фиг.9 схематически проиллюстрирован емкостный детектор воздействий со стороны пользователя,
на Фиг.10 проиллюстрирована группа ответных сигналов, которые могут наблюдаться, когда пальцы пользователя перемещаются, как показано на Фиг.8.
Подробное описание
На фиг.1 схематически проиллюстрирован один из вариантов осуществления автоматического инжектора 10 с силовой головкой 12. С силовой головкой 12 может быть связан один или несколько графических интерфейсов 11 пользователя (ГИП). Каждый ГИП 11: 1) может представлять собой интерфейс любого применимого размера, формы, конфигурации и/или типа; 2) может быть оперативно связан с силовой головкой 12 любым применимым способом; 3) может размещаться в любом применимом местоположении; 4) может быть сконфигурирован на обеспечение одной или любого сочетания следующих функций: управления одной или несколькими особенностями работы автоматического инжектора 10; ввода/изменения одного или нескольких параметров, связанных с действием автоматического инжектора 10; и отображения применимой информации (например, связанной с действием автоматического инжектора 10); или 5) содержать любое сочетание перечисленного. Может использоваться любое применимое число ГИП 11. В одном из вариантов осуществления автоматический инжектор 10 содержит ГИП 11, включенный в пульт, реализованный отдельно от силовой головки 12, но поддерживающий связь с ней. В другом варианте осуществления автоматический инжектор 10 содержит ГИП 11, являющийся частью силовой головки 12. В еще одном варианте осуществления в автоматическим инжекторе 10 используется один ГИП 11 на отдельном пульте, который поддерживает связь с силовой головкой 12, а также другой ГИП 11, который размещается на силовой головке 12. Каждый ГИП 11 способен обеспечивать одинаковые выполняемые функции или набор выполняемых функций, или ГИП 11 могут различаться по меньшей мере в том, что касается их соответствующих выполняемых функции.
На силовой головке 12 может быть установлен шприц 28, и в этом случае он может считаться частью автоматического инжектора 10. В случае некоторых процедур инъекции в шприце 28 может создаваться относительно высокое давление. Соответственно, может быть желательным размещать шприц 28 внутри герметичной оболочки 26. Герметичная оболочка 26 обычно связана с силовой головкой 12 таким образом, что шприц 28 может размещаться в ней как часть силовой головки или после установки шприца 28 на силовой головке 12. С силовой головкой 12 обычно используется одна и та же герметичная оболочка 26 с возможностью размещения в ней и извлечения из нее различных шприцев 28 для множества процедур инъекции. Герметичная оболочка 26 может отсутствовать, если автоматический инжектор 10 сконфигурирован/используется для инъекций под низким давлением и/или шприц(-ы) 28 для использования с автоматическим инжектором 210 имеет(-ют) достаточную прочность, чтоб выдерживать инъекции под высоким давлением без дополнительной защиты, обеспечиваемой герметичной оболочкой 26. В любом случае выпускаемая из шприца 28 жидкость может направляться в трубопровод 38 любого применимого размера, формы, конфигурации и/или типа, который с возможностью движения жидкости может быть связан со шприцем 28 любым применимым способом, и который может направлять жидкость в любое приемлемое местоположение (например, пациенту).
Силовая головка 12 содержит узел приводного механизма или привод 14 плунжера шприца, который взаимодействует (например, сопряжен) со шприцем 28 (например, его плунжером 32) с целью выпуска жидкости из шприца 28. Этот узел 14 приводного механизма плунжера шприца содержит источник 16 приводного механизма (например, электродвигатель любого применимого размера, формы, конфигурации и/или типа, необязательную зубчатую передачу и т.п.) для подачи мощности на выходную сторону 18 приводного механизма (например, вращающийся подающий винт). Выходная сторона 18 приводного механизма может продвигать толкатель 20 по соответствующей траектории (например, осевой). Толкатель 20 может содержать соединительную муфту 22, взаимодействующую или сопряженную с соответствующей частью шприца 28, как описано далее.
Шприц 28 содержит плунжер или поршень 32, который подвижно размещается в цилиндре 30 шприца (например, с возможностью возвратно-поступательного движения по оси, совпадающей с двунаправленной стрелкой В). Плунжер 32 может содержать соединительную муфту 34. Эта соединительная муфта 34 плунжера шприца может взаимодействовать или сопрягаться с соединительной муфтой 22 толкателя, что позволяет узлу 14 приводного механизма втягивать плунжер 32 в цилиндр 30 шприца. Соединительная муфта 34 плунжера шприца может представлять собой вал 36а, который проходит от корпуса плунжера 32 шприца, с головкой или заглушкой 36b. Тем не менее, соединительная муфта 34 плунжера шприца может представлять собой муфту любого применимого размера, формы, конфигурации и/или типа.
В целом, узел 14 приводного механизма плунжера шприца автоматического инжектора 10 может взаимодействовать с плунжером 32 шприца 28 любым применимым способом (например, путем механического контакта; применимого соединения (механического или иного)) с тем, чтобы иметь возможность перемещать или продвигать плунжер 32 шприца (относительно цилиндра 30 шприца) по меньшей мере в одном направлении (например, с целью выпуска жидкости из соответствующего шприца 28). Иными словами, хотя узел 14 приводного механизма плунжера шприца может быть способен перемещаться в двух направлениях (например, посредством срабатывания одного и того же источника 16 приводного механизма), автоматический инжектор 10 может быть сконфигурирован таким образом, что при срабатывании узла 14 приводного механизма только каждый плунжер 32 шприца, используемый автоматическим инжектором 10, в действительности перемещается только в одном направлении. Тем не менее, узел 14 приводного механизма плунжера шприца может быть сконфигурирован на взаимодействие с каждым плунжером 32 шприца, используемым автоматическим инжектором 10, с тем, чтобы быть способным перемещать каждый такой плунжер 32 шприца в каждом из двух различных направлениях (например, в различных направлениях по общей оси).
Втягивание плунжера 32 шприца может использоваться для ввода жидкости в цилиндр 30 шприца для последующей инъекции или выпуска, для фактического всасывания жидкости в цилиндр 30 шприца для последующей инъекции или выпуска или с любой другой применимой целью. В некоторых конфигурациях необязательно, чтобы узел 14 приводного механизма плунжера шприца был способен втягивать плунжер 32 шприца, и в этом случае соединительная муфта 20 толкателя и соединительная муфта 34 плунжера шприца могут не требоваться. В этом случае узел 14 приводного механизма плунжера шприца может втягиваться с целью другой операции доставки жидкости (например, после того, как установлен другой предварительно наполненный шприц 28). Даже при использовании соединительной муфты 22 толкателя и соединительной муфты 32 плунжера шприца эти компоненты необязательно могут быть соединены, когда толкатель 20 продвигает плунжер 32 шприца с целью выпуска жидкости из шприца 28 (например, толкатель 20 может просто "проталкивать" плунжер 34 шприца или непосредственно проксимальный конец плунжера 32 шприца). Для сцепления соединительной муфты 22 толкателя и соединительной муфты 234 плунжера шприца, расцепления соединительной муфты 22 толкателя и соединительной муфты 34 плунжера шприца или того и другого может использоваться любое одно перемещение или сочетание перемещений в любом применимом измерении или сочетании измерений.
Шприц 28 может быть установлен на силовой головке 12 любым применимым способом. В проиллюстрированном варианте осуществления на силовой головке 12 соответствующим образом установлен корпус 24, служащий устройством сопряжения между шприцем 28 и силовой головкой 12. Этот корпус 24 может представлять собой адаптер, в котором установлены шприцы 28 одной или нескольких конфигураций, при этом шприц 28 по меньшей мере одной конфигурации может быть установлен непосредственно на силовой головке 12 без использования какого-либо адаптера. Корпус 24 также может представлять собой планшайбу, на которой могут быть установлены шприцы 28 одной или нескольких конфигураций. В этом случае планшайба может требоваться для установки шприца 28 на силовой головке 12, поскольку шприц 28 не может быть установлен на силовой головке 12 без планшайбы. При использовании герметичной оболочки 26 она может быть установлена на силовой головке 12 различными способами, рассмотренными в описании применительно к шприцу 28, после чего в герметичной оболочке 26 устанавливают шприц 28.
Корпус 24 может быть установлен на силовой головке 12 и оставаться в неподвижном положении относительно нее при установке шприца 28. В качестве альтернативы, корпус 24 и силовая головка 12 могут быть соединены подвижно в расчете на установку шприца 28. Например, корпус 24 может перемещаться в плоскости двунаправленной стрелки А с целью обеспечения одного или нескольких из следующего: сцепленного состояния или положения и расцепленного состояния или положения соединительной муфты 22 толкателя и соединительной муфты 34 плунжера шприца.
На Фиг.2А показана конкретная конфигурация автоматического инжектора, обозначенного позицией 40 и по меньшей мере в целом соответствующего автоматическому инжектору 10, показанному на Фиг.1. Автоматический инжектор 40 содержит силовую головку 50, которая установлена на передвижной стойке 48. На силовой головке 50 установлены два шприца 86а, 86b автоматического инжектора 40. При срабатывании автоматического инжектора 40 из шприцев 86а, 86b может выпускаться жидкость.
Передвижная стойка 48 может представлять собой стойку любого приемлемого размера, формы, конфигурации и/или типа. Для обеспечения мобильности стойки 48 могут использоваться колеса, ролики, колесики и т.п. Силовая головка 50 может находиться в фиксированном положении относительно передвижной стойки 48. Тем не менее желательно, чтобы положение силовой головки 50 относительно передвижной стойки 48 по меньшей мере регулировалось каким-либо способом. Например, желательно, чтобы силовая головка 50 находилась в одном положении относительно передвижной стойки 48 при поступлении жидкости в один или несколько шприцев 86а, 86b и в другом положении относительно передвижной стойки 48 при осуществлении процедуры инъекции. С этой целью силовая головка 50 может быть соединена с передвижной стойкой 48 с возможностью перемещения любым приемлемым способом (например, таким образом, чтобы силовая головка 50 могла поворачиваться по меньшей мере в определенных пределах, а затем оставаться в желаемом положении).
Следует учесть, что силовая головка 50 может быть установлена любым приемлемым способом для подачи жидкости. Например, вместо установки на передвижной конструкции силовая головка 50 может быть соединена с опорной конструкцией, которая в свою очередь установлена на соответствующей конструкции (например, потолке, стене, полу). Положение опорной конструкции силовой головки 50 может по меньшей мере регулироваться до определенной степени (например, за счет возможности изменения положения одной или нескольких опорных секций относительно одной или нескольких других опорных секций), или она может фиксироваться в неподвижном положении. Кроме того, силовая головка 50 может быть объединена с любой такой опорной конструкцией с возможностью фиксации в неподвижном положении или регулирования относительно опорной конструкции.
Силовая головка 50 содержит графический интерфейс 52 пользователя (ГИП). ГИП 52 может быть сконфигурирован для обеспечения одной из следующих функций или любого их сочетания: управления одной или несколькими особенностями работы автоматического инжектора 40; ввода/изменения одного или нескольких параметров, связанных с действием автоматического инжектора 10; и отображения подходящей информации (например, связанной с действием автоматического инжектора 10). Автоматический инжектор 40 может содержать пульт 42 и силовой узел 46, каждый из которых может поддерживать связь с силовой головкой 50 любым приемлемым способом (например, посредством одного или нескольких кабелей) и может размещаться на столе, или может быть установлен в стойке с электронной аппаратурой в диагностическом кабинете, или любом другом приемлемом местоположении, или там и там. Силовой узел 46 может содержать одно или несколько из следующего в любом приемлемом сочетании: источник питания инжектора 40; схему сопряжения для обеспечения связи между пультом 42 и силовой головкой 50; схему обеспечения соединения автоматического инжектора 40 с удаленными устройствами, такими как пульты дистанционного управления, переключатели ручного или ножного дистанционного управления или обеспечения других соединений изготовителя комплектного оборудования (OEM) для дистанционного управления (например, обеспечивающих синхронизацию работы автоматического инжектора 40 с рентгеновским экспонированием системы формирования изображений); и любые другие применимые компоненты. Пульт 42 может содержать сенсорный дисплей 44, который в свою очередь может обеспечивать одну или несколько из следующих функций в любом применимом сочетании: дистанционное управление оператором одной или несколькими особенностями работы автоматического инжектора 40; ввод/редактирование оператором одного или нескольких параметров, связанных с действием автоматического инжектора 40; выбор и сохранение оператором программ работы автоматического инжектора 40 в автоматическом режиме (которые позднее могут автоматически выполняться автоматическим инжектор 40 после инициации оператором); и отображение любой подходящей информации, касающейся автоматического инжектора 40 и включающей любую особенность его работы.
На Фиг.2Б проиллюстрированы различные детали, касающиеся компоновки шприцев 86а, 86b и силовой головки 50. Каждый из шприцев 86а, 86b содержит одинаковые общие компоненты. Шприц 86а содержит плунжер или поршень 90а, который подвижно размещается в цилиндре 88а шприца. При перемещении плунжера 90а по оси 95а (Фиг.2А) посредством действия силовой головки 50 из цилиндра 88а через головку 89а шприца 86а выпускается жидкость. С головкой 89а с возможностью движения жидкости любым применимым способом обычно связан соответствующий трубопровод (не показан) для направления жидкости до желаемого местоположения (например, пациента). Аналогичным образом, шприц 86b содержит плунжер или поршень 90b, который подвижно размещается в цилиндре 88b шприца. При перемещении плунжера 90b по оси 100b (фиг.2А) посредством действия силовой головки 50 из цилиндра 88b через головку 89b шприца 86b выпускается жидкость. С головкой 89b с возможностью движения жидкости любым приемлемым способом обычно связан соответствующий трубопровод (не показан) для направления жидкости до желаемого местоположения (например, пациента).
Шприц 86а соединен с силовой головкой 50 промежуточной планшайбой 102а. Эта планшайба 102а содержит раму 104, на которую опирается по меньшей мере часть цилиндра 88а шприца и которая может обеспечивать любые дополнительные выполняемые функции или сочетание выполняемых функций. На силовой головке 50 установлен зафиксированный относительно нее держатель 82а, сопряженный с планшайбой 102а. Соединительная муфта 76 толкателя 74 (Фиг.2В), являющаяся вместе с толкателем 74 частью узла приводного механизма плунжера шприца или приводного механизма 56 (Фиг.2В) плунжера шприца 86а, находится вблизи планшайбы 102а, когда она установлена на силовой головке 50. Узел 56 приводного механизма плунжера шприца будет подробнее рассмотрен далее со ссылкой на Фиг.2В. В целом, соединительная муфта 76 толкателя может входить в зацепление с плунжером 90а шприца 86а, после чего соединительная муфта 76 толкателя и толкатель 74 (Фиг.2В) могут перемещаться относительно силовой головки 50 с целью перемещения плунжера 90а шприца по оси 100а (Фиг.2А). Соединительная муфта 76 толкателя может входить в контакт, но фактически без зацепления с плунжером 90а шприца при перемещении плунжера 90а шприца с целью выпуска жидкости через головку 89а шприца 86а.
С целью как установки, так и извлечения планшайбы 102а из ее держателя 82а на силовой головке 50 планшайба 102а может перемещаться по меньшей мере в целом в плоскости, ортогональной осям 100а, 100b (связанным с перемещением плунжеров 90а, 90b шприцев, соответственно и проиллюстрированными на Фиг.2А). Планшайба 102а может использоваться для соединения плунжера 90а шприца с соответствующей соединительной муфтой 76 толкателя на силовой головке 50. С этой целью планшайба 102а снабжена парой рукояток 106а. В целом, при начальном размещении шприца 86а в планшайбе 102а рукоятки 106а могут перемещаться и в свою очередь перемещать/сдвигать шприц 86а по меньшей мере в основном в плоскости, ортогональной осям 100а, 100b (связанным с перемещением плунжеров 90а, 90b шприцев, соответственно, и проиллюстрированным на Фиг.2А). При перемещении рукояток 106а в одно положение шприц 86а перемещается/сдвигается (относительно планшайбы 102а) по меньшей мере в основном вниз, и его плунжер 90а сцепляется с соответствующей соединительной муфтой 76 толкателя. При перемещении рукояток 106а в другое положение шприц 86а перемещается/сдвигается (относительно планшайбы 102а) по меньшей мере в основном вверх, и его плунжер 90а расцепляется с соединительной муфтой 76 толкателя.
Шприц 86b соединен с силовой головкой 50 промежуточной планшайбой 102b. На силовой головке 50 установлен зафиксированный относительно нее держатель 82b, сопряженный с планшайбой 102b. Соединительная муфта 76 толкателя 74 (Фиг.2В), являющаяся вместе с толкателем 74 частью узла приводного механизма плунжера шприца или приводного механизма 56 плунжера шприца 86b, находится вблизи планшайбы 102b, когда она установлена на силовой головке 50. Узел 56 приводного механизма плунжера шприца будет подробнее рассмотрен далее со ссылкой на Фиг.2В. В целом, соединительная муфта 76 толкателя может входить в зацепление с плунжером 90b шприца 86b, после чего соединительная муфта 76 толкателя и толкатель 74 (Фиг.2В) могут перемещаться относительно силовой головки 50 с целью перемещения плунжера 90b шприца по оси 100b (Фиг.2А). Соединительная муфта 76 толкателя может входить в контакт с плунжером 90b шприца, но фактически без соединения с ним, при перемещении плунжера 90b шприца с целью выпуска жидкости через головку 89b шприца 86b.
С целью как установки, так и извлечения планшайбы 102b из ее держателя 82b на силовой головке 50, планшайба 102b может перемещаться по меньшей мере в основном в плоскости, ортогональной осям 100а, 100b (связанным с перемещением плунжеров 90а, 290b шприцев, соответственно, и проиллюстрированными на Фиг.2А). Планшайба 102b может использоваться для соединения плунжера 90b шприца с соответствующей соединительной муфтой 76 толкателя на силовой головке 50. С этой целью планшайба 102b может быть снабжена рукояткой 106b. В целом, при начальном размещении шприца 86b в планшайбе 102b шприц 86b может вращаться вокруг своей продольной оси 100b (Фиг.2А) и относительно планшайбы 102b. Это вращение может осуществляться путем перемещения рукоятки 106b, захвата и поворота шприца 86b или того и другого. В любом случае в результате этого вращения шприц 86b и планшайба 102b перемещаются/сдвигаются по меньшей мере в основном в плоскости, ортогональной осям 100а, 10b (связанным с перемещением плунжеров 90а, 90b шприцев, соответственно, и проиллюстрированным на Фиг.2А). При вращении шприца 86b в одном направлении шприц 86b и планшайба 102b перемещаются/сдвигаются по меньшей мере в основном вниз, и плунжер 90b шприца сцепляется с соответствующей соединительной муфтой 76 толкателя. При вращении шприца 86b в противоположном направлении шприц 86b и планшайба 102b перемещаются/сдвигаются по меньшей мере в основном вверх, и плунжер 90b шприца расцепляется с соответствующей соединительной муфтой 76 толкателя.
Как показано на Фиг.2Б, плунжер 90b шприца содержит корпус 92 плунжера и соединительную муфту 94 плунжера шприца. Эта соединительная муфта 94 плунжера шприца содержит вал 98, который отходит от корпуса 92 плунжера, и головку 96, отстоящую от корпуса 92 плунжера. На поверхности каждой из соединительных муфт 76 толкателя выполнена большая прорезь, которая расположена сзади малой прорези. Головка 96 соединительной муфты 94 плунжера шприца может помещаться в большой прорези соединительной муфты 76 толкателя, а вал 98 соединительной муфты 94 плунжера шприца может проходить через малую прорезь на поверхности соединительной муфты 76 толкателя, когда плунжер 90b шприца и соответствующая соединительная муфта 76 толкателя находятся в сцепленном состоянии или положении. Плунжер 90а шприца может содержать аналогичную соединительную муфту 94 плунжера шприца для сопряжения с соответствующей соединительной муфтой 76 толкателя.
Силовая головка 50 используется для выпуска жидкости из шприцев 86а, 86b указанного автоматического инжектора 40. Иными словами, силовая головка 50 обеспечивает движущую силу для выпуска жидкости из каждого из шприцев 86а, 86b. На Фиг.2В проиллюстрирован один из вариантов осуществления узла приводного механизма или приводного механизма плунжера шприца, который обозначен позицией 56 и может использоваться в силовой головке 50 для выпуска жидкости из каждого из шприцев 86а, 86b. В силовую головку 50 может быть включен отдельный узел 56 приводного механизма плунжера шприца для каждого из шприцев 86а, 86b. С этой целью и, как показано на Фиг.2А-Б, силовая головка 50 может быть снабжена рукоятками 80а и 80b для управления по отдельности каждым из узлов 56 приводного механизма плунжера шприца.
Каждый из отдельных компонентов узла 56 приводного механизма плунжера шприца, показанного на Фиг.2В, изначально может представлять собой компонент любого применимого размера, формы, конфигурации и/или типа. Узел 56 приводного механизма плунжера шприца содержит электродвигатель 58, который имеет выходной вал 60. На выходном вале 60 электродвигателя 58 установлена вращающаяся с ним ведущая шестерня 62. Ведущая шестерня 62 входит или по меньшей мере может входить в зацепление с ведомой шестерней 64. Эта ведомая шестерня 64 установлена на подающем винте или вале 66 и вращается с ним. Ось, вокруг которой вращается подающий винт 66, обозначена позицией 68. Подающий винт 66 соответствующим образом опирается на один или несколько подшипников 72.
На подающем винте 66 подвижно установлен толкатель 74. В целом, при вращении подающего винта 66 в одном направлении толкатель 74 продвигается по оси подающего винта 66 (и тем самым вдоль оси 68) в направлении соответствующего шприца 86а/b, а при вращении подающего винта 66 в противоположном направлении толкатель 74 продвигается по оси подающего винта 66 (и тем самым вдоль оси 68) от соответствующего шприца 86а/b. С этой целью по меньшей мере на часть периметра подающего винта 66 выполнена спиральная резьба 70, сопряженная по меньшей мере с частью толкателя 74. Толкатель 74 также подвижно установлен в соответствующей втулке 78, которая не позволяет толкателю 74 вращаться во время вращения подающего винта 66. Соответственно, вращение подающего винта 66 обеспечивает осевое перемещение толкателя 74 в направлении, определяемом направлением вращения подающего винта 66.
Толкатель 74 содержит соединительную муфту 76, которая может с возможностью разъединения сцепляться с соединительной муфтой 94 плунжера 90а/b соответствующего шприца 86а/b. Когда соединительная муфта 76 толкателя и соединительная муфта 94 плунжера шприца сцеплены соответствующим образом, плунжер 90а/b шприца перемещается вместе с толкателем 74. На Фиг.2В проиллюстрирована конфигурация, в которой шприц 86а/b может перемещаться по соответствующей оси 100а/b, не будучи соединенным с толкателем 74. Когда шприц 86а/b перемещается по соответствующей оси 100a/b, в результате чего головка 96 плунжера 90а/b шприца совмещается с соединительной муфтой 76 толкателя, но оси 68 по-прежнему смещены, как в конфигурации, проиллюстрированной на Фиг.2В, шприц 86а/b может перемещаться в плоскости, ортогональной оси 68, по которой перемещается толкатель 74. Тем самым между соединительной муфтой 76 толкателя и соединительной муфтой 96 плунжера шприца устанавливается сцепление описанным выше способом.
Каждый из автоматических инжекторов 10, 40, проиллюстрированных на Фиг.1, 2А-В, соответственно, может применяться в любых соответствующих целях, включая, без каких-либо ограничений, формирование медицинских изображений, когда объекту (например, пациенту) вводится жидкость. Типичные применения автоматических инжекторов 10, 40 в целях формирования медицинских изображений включают без каких-либо ограничений компьютерную томографию (КТ), магнитно-резонансную томографию (МРТ), однофотонную эмиссионную компьютерную томографию (ОФЭКТ), позитронную эмиссионную томографию (ПЭТ), рентгенографию, ангиографию, формирование оптических изображений и формирование ультразвуковых изображений. Каждый из автоматических инжекторов 10, 40 может применяться отдельно или в сочетании с одним или несколькими другими компонентами. Каждый из автоматических инжекторов 10, 40 может быть оперативно связан с одним или несколькими компонентами, например, с целью передачи информации между автоматическим инжектором 10, 40, и одним или несколькими другими компонентами (например, о задержке сканирования, сигналах начала инъекции, скорости инъекции).
В каждом из автоматических инжекторов 10, 40 может использоваться любое число шприцев, включая, без каких-либо ограничений, конфигурации с одной головкой (одним шприцем) и конфигурации с двойной головкой (двумя шприцами). В случае конфигурации с множеством шприцев каждый автоматический инжектор 10, 40 может выпускать жидкость из различных шприцев любым приемлемым способом и в любой временной последовательности (например, последовательно из двух или более шприцев, одновременно из двух или более шприцев или в любом сочетании). Жидкость из множества шприцев может выпускаться в общий трубопровод (например, для доставки до единого места инъекции), или жидкость из одного шприца может выпускаться в один трубопровод (например, для доставки до одного места инъекции), а жидкость из другого шприца может выпускаться в другой трубопровод (например, для доставки до другого места инъекции). В каждом таком шприце, используемом в каждом из автоматических инжекторов 10, 40, может содержаться любая приемлемая жидкость, например, контрастное вещество, радиоактивный медицинский препарат, физиологический раствор и любое их сочетание. Каждый такой шприц, используемый в каждом из автоматических инжекторов 10, 40, может быть установлен любым применимым способом (например, с задней стороны; с передней стороны; сбоку).
На Фиг.3А схематически проиллюстрирован корпус 110 шприца, соединенный с силовой головкой 50, показанной на Фиг.2В. Корпус 110 шприца содержит емкостной детектор 112 жидкости. Корпус 110 шприца может содержать опорный участок или раму 114 шприца, на которую опирается шприц 116 и/или которая окружает шприц 116. В проиллюстрированном варианте осуществления настоящего изобретения емкостной детектор 112 жидкости размещается во внутреннем пространстве 113 опорного участка 114 шприца (например, емкостной детектор 112 жидкости может быть заключен или вложен в корпус 110 шприца).
Корпус 110 шприца может иметь любой применимый размер, форму конфигурацию и/или тип. В проиллюстрированном варианте осуществления настоящего изобретения корпус 110 шприца соответствующим образом установлен или иным способом встроен в силовую головку 50 и служит устройством сопряжения между шприцем 116 и силовой головкой 50. Корпус 110 шприца может быть постоянно соединен с силовой головкой 50 или встроен в нее или по меньшей мере установлен на ней с помощью соответствующих приспособлений. Корпус 110 шприца также может представлять собой адаптер, рассчитанный на различные конфигурации шприцев 116 для установки на силовой головке 50 (например, адаптер может быть установлен на структуре сопряжения со шприцем силовой головки, что позволяет использовать отличающийся шприц, т.е. один шприц может использоваться со структурой сопряжения со шприцем силовой головки, а другой шприц может использоваться, когда на силовой головке установлен подходящий адаптер). Корпус 110 шприца также может представлять собой планшайбу, на которой могут устанавливаться шприцы 116 одной или нескольких конфигураций и которая может устанавливаться на силовой головке 50 без каких-либо приспособлений (например, просто вручную). В этом случае планшайба может требоваться для установки любого шприца 116 на силовой головке 50, а шприц 116 будет невозможно установить на силовой головке 50 без планшайбы.
Емкостной детектор 112 жидкости в целом содержит печатную плату (РСВ) 130, отдельные конденсаторы 118a-118h и электронные схемы 132 датчиков. Конденсаторы 118a-118h могут размещаться на РСВ 130. Отдельные платы каждого конденсатора 118a-118h могут быть сформированы из проводящего слоя или слоев РСВ 130 известными методами изготовления РСВ (например, травлением, фотолитографией). В качестве альтернативы, платы конденсаторов 118a-118h могут представлять собой дискретные компоненты, взаимосвязанные (например, отдельно установленные) с РСВ 130. Электронные схемы 132 датчиков также могут быть установлены на РСВ 130. Электронные схемы 132 датчиков могут содержать компоненты, способные подавать в конденсаторы 118a-118h сигнал генерирования ими соответствующих электрических полей, и/или компоненты, способные определять емкость каждого отдельного конденсатора 118a-118h. Электронные схемы 132 датчиков могут, например, содержать интегральную схему, способную обнаруживать изменения емкости подсоединенных конденсаторов 118a-118h. Одной такой интегральной схемой является QT1080 8 Key QTouch® производства компании Quantum Research Group (Питсбург, Пенсильвания, США).
РСВ 130 и соединенные с ней устройства могут быть установлены и изолированы во внутреннем пространстве 113 корпуса 110 шприца. Тем самым РСВ 130 может быть защищена от потенциальной протечки жидкости и/или повреждения в результате прямого контакта. Корпус 110 шприца может быть коммуникативно связан с силовой головкой 50 и/или другими компонентами автоматического инжектора 40 кабелем 134. Вместе с кабелем 134 или вместо него могут использоваться другие способы коммуникативного соединения корпуса 110 шприца с силовой головкой 50 и/или другими компонентами автоматического инжектора 40. Например, корпус 110 шприца может быть соединен с автоматическим инжектором 40 беспроводной связью. В другом примере корпус 110 шприца может содержать проводящие элементы, которые проводящим способом сопрягаются с соответствующими элементами силовой головки 50, когда корпус 110 шприца установлен на силовой головке 50.
Емкостной детектор 112 жидкости может в целом использоваться для определения, прогнозирования и/или оценки объема жидкости в зоне 124 цилиндра шприца (рассмотренной далее). Соответственно, емкостной детектор 112 жидкости может определять объем жидкости в предварительно наполненном шприце после установки. Кроме того, емкостной детектор 112 может определять объем жидкости в шприце в любое применимое время, когда шприц установлен на корпусе 110 шприца (например, до и/или во время процедуры инъекции). Используемый термин "жидкость" означает негазообразные жидкотекучие среды, включая жидкости, которые могут иметь относительно высокую вязкость, но пригодны для инъекции пациенту, в том числе вещества, которые могут содержать множество составляющих, такие как суспензии и коллоиды (например, эмульсии).
Емкостной детектор 112 жидкости содержит восемь отдельных конденсаторов 118a-118h, расположенных параллельно и разнесенных вдоль продольной оси 120 шприца 116, установленного на корпусе 110 шприца. Может использоваться любое приемлемое число конденсаторов. Дополнительные конденсаторы могут размещаться вдоль системы трубок (не показаны), прикрепленной к головке 122 шприца 116. Конденсаторы 118a-118h могут быть расположены таким образом, что каждый отдельный конденсатор 118a-118h может обнаруживать жидкость в заданной части зоны 124 цилиндра шприца. Зона 124 цилиндра шприца определяется как максимальный объем пространства относительно корпуса 110 шприца, который может быть занят цилиндром (например, цилиндром 117 шприца 116) любого приемлемого шприца, когда этот шприц установлен на корпусе 110 шприца. Зона 124 цилиндра шприца может иметь длину, совпадающую с длиной цилиндра 117 шприца, когда шприц 116 установлен в корпусе 110 шприца. Зона 124 цилиндра шприца может иметь продольную ось, совпадающую с продольной осью 120 цилиндра шприца, когда шприц 116 установлен в корпусе шприца. Как показано на Фиг.3А, первый конденсатор 118а емкостного детектора 112 жидкости может служить для обнаружения жидкости в зоне 124 цилиндра шприца в месте или вблизи места расположения корпуса 92 плунжера, когда корпус 92 плунжера находится в полностью втянутом положении внутри цилиндра 117 шприца (как показано на Фиг.3А). Кроме того, последний конденсатор 118h может служить для обнаружения жидкости в наконечнике или вблизи наконечника головки 122 шприца 116. Остальные конденсаторы 118b-118g могут находиться, например, на одинаковом расстоянии друг от друга между первым и последним конденсаторами 118а, 118h. Соответственно, конденсаторы могут быть разнесены по всей длине зоны 124 цилиндра шприца. Хотя конденсаторы рассмотрены применительно к обнаружению жидкости (например, значение емкости ниже заданного уровня может указывать на присутствие жидкости), описанные конденсаторы также могут обнаруживать воздух, вакуум или отсутствие жидкости (например, значение емкости выше определенного уровня может указывать на присутствие воздуха).
В некоторых случаях, таких как проиллюстрированы на Фиг.3В, в корпусе 110 может быть установлен шприц 116′, содержащий меньший объем жидкости, чем зона 124 цилиндра шприца. Соответственно, корпус 92 плунжера шприца 116′ может находиться в исходном положении, показанном на Фиг.3В (плунжер 92 шприца 116′ может быть показан в полностью втянутом положении), в результате чего объем шприца 116′ между корпусом 92 плунжера и головкой 122 преимущественно равен объему содержащей в нем жидкости (например, в пространстве между корпусом 92 плунжера и головкой 122 отсутствует воздух). Следовательно, шприц 116′ может иметь соответствующий вал 36а′, длина которого выбирается таким образом, чтобы заглушка 36b находилась в том же исходном положении, что и шприц 116. Соответственно, процесс установки шприца 116′ в исходное положение на корпусе 110 шприца, включая установку заглушки 36b на соединительную муфту 76 толкателя, может быть аналогичен процессу установки шприца 116 в исходное положение на корпусе 110 шприца. На корпусе 110 шприца могут аналогичным образом устанавливаться другие шприцы, содержащие отличающиеся начальные объемы жидкости и имеющие соответствующие отличающиеся валы.
В альтернативных конструкциях емкостной детектор 112 жидкости может содержать любое приемлемое число конденсаторов. Такие конденсаторы могут быть размещены любым подходящих образом вдоль зоны 124 цилиндра шприца. Например, такие конденсаторы могут быть разнесены на одинаковое расстояние друг от друга или расположены неравномерно. Конденсаторы могут быть разнесены на неодинаковое расстояние друг от друга, чтобы емкостной детектор 112 жидкости мог различать установленные шприцы с различными начальными объемами жидкости. Конденсаторы могут быть расположены вдоль меньшей части зоны 124 цилиндра шприца, чем вся длина зоны 124 цилиндра шприца.
Каждый из конденсаторов 118a-118h емкостного детектора 112 жидкости может представлять собой две расположенные рядом платы. Платы каждого отдельного конденсатора 118a-118h могут лежать преимущественно в одной плоскости. На Фиг.3Б схематически проиллюстрирован вид в поперечном разрезе по линии 3b зоны 124 цилиндра шприца и корпуса 110 шприца, показанного на Фиг.3А. Поперечный разрез пересекает конденсатор 118d. Конденсатор 118d может содержать две лежащие преимущественно в одной плоскости расположенные рядом платы 126а, 126b, и при подаче питания на конденсатор 118d может формироваться электрическое поле 128 в целом дугообразной формы, простирающееся вверх и между платами 126а, 126b. Часть электрического поля 128 может пересекаться с частью зоны 124 цилиндра шприца.
Размер и форма электрического поля 128 проиллюстрированы на Фиг.3Б в качестве примера. Действительные размер и форма электрического поля 128, генерируемого конденсатором 118d, могут зависеть от нескольких факторов, включая б размер и форму плат 126а, 126b конденсатора, взаимное расположение плат 126а, 126b конденсатора и уровень напряжения плат 126а, 126b, но не ограничиваются ими. Кроме того, на полезный размер электрического поля 128 может влиять чувствительность электронных схем 132 датчиков. Например, электронные схемы 132 датчиков с более высокой емкостной чувствительностью могут быть способными обнаруживать изменения емкости из-за объектов в пограничной области электрического пола 128, а электронные схемы 132 датчиков с более низкой емкостной чувствительностью могут быть не способными обнаруживать такие изменения емкости. Соответственно, размер и форма электрического поля 128 могут значительно отличаться от проиллюстрированных на Фиг.3Б. Например, в одной из конструкций конденсатор 118d может генерировать меньшее или большее электрическое поле 128, чем показано на Фиг.3Б. Например, в одном из вариантов осуществления электрическое поле 128 конденсатора 118d может охватывать всю площадь поперечного сечения зоны 124 цилиндра шприца вблизи конденсатор 118d.
Возмущения электрического поля 128 (например, ослабление электрического поля или полная блокировка электрического поля) могут вызывать изменения измеренной емкости между платами 126а, 126b. Например, когда область зоны 124 цилиндра шприца 116, совпадающая с электрическим полем 128, заполнена воздухом, емкость между платами 126а, 126b может иметь первое значение. Когда область зоны 124 цилиндра шприца 116, совпадающая с электрическим полем 128, заполнена жидкость (например, контрастным веществом), емкость между платами 126а, 126b может иметь второе значение. Различие между указанными значениями может объясняться различием между диэлектрическими свойствами воздуха и диэлектрическими свойствами жидкости. Кроме того, жидкости различных типов могут иметь неодинаковые диэлектрические свойства. Путем определения того, находится ли емкость конденсатора 118d на первом уровне или на втором уровне и с учетом диэлектрических свойств измеряемой жидкости, можно определять, присутствует ли воздух или жидкость в области зоны 124 цилиндра шприца, совпадающей с электрическим полем 128. В другом способе определения присутствия воздуха или жидкости может генерироваться пороговое значение между первым уровнем и вторым уровнем и в зависимости от того, превышает ли измеренная емкость пороговое значение или является меньшей, чем пороговое значение, можно определять, присутствует ли воздух или жидкость в области зоны 124 цилиндра шприца.
Возможно, что в зоне 124 цилиндра шприца может быть создан вакуум. Например, это может происходить в результате втягивания корпус 92 плунжера с более высокой скоростью, чем скорость поступления жидкости в зону 124 цилиндра шприца, что приводит к образованию полости. В таких случаях вакуум может обнаруживаться теми же устройствами и способами, которые описаны применительно к обнаружению воздуха. Соответственно, описание обнаружения воздуха также может относиться к обнаружению вакуума.
Присутствие жидкости или воздуха может определяться логической схемой 39 для определения уровня жидкости (Фиг.1). Логическая схема 39 для определения уровня жидкости может быть способна интерпретировать сигналы конденсаторов 118а-118h и/или других источников (например, детектора угла силовой головки 50, радиометки на шприце 116 для определения типа жидкости в шприце) и рассчитывать объем жидкости в шприце 116 и/или обнаруживать воздух в шприце 116. Оценка объема жидкости в шприце также может быть основана ранее известных параметрах шприца (например, внутреннем диаметре, длине цилиндра, общем объеме). Такие ранее известные параметры шприца вместе с сигналами конденсаторов 118a-118h и/или других источников могут использоваться для вычисления расчетного объема жидкости в шприце 116. Расчетный объем жидкости может отображаться любым применимым дисплеем (например, дисплеем 44, ГИП 52). Логическая схема 39 для определения уровня жидкости может размещаться в любом приемлемом местоположении или сочетании приемлемых местоположений. Например, как показано на Фиг.1, логическая схема 39 для определения уровня жидкости может размещаться в силовой головке 12. В другом примере логическая схема 39 для определения уровня жидкости может размещаться в электронных схемах 132 датчиков.
Как показано на Фиг.3Б применительно к конденсатору 118d, каждый из конденсаторов 118a-118h емкостного детектора 112 жидкости может представлять собой две по существу лежащие в одной плоскости платы, расположенные рядом. Могут использоваться другие приемлемые конфигурации плат конденсатора. Например, платы конденсатора могут не находиться в одной плоскости, и в этом случае они располагаются под углом друг к другу и обращены к центру шприца. Платы каждого из конденсаторов 118a-118h могут располагаться таким образом, что вектор, проходящий перпендикулярно от одной из плат конденсатора, не пересекает другую плату.
Продолжая использовать конденсатор 118d в качестве примера, выходной сигнал емкостного детектора 112 жидкости на основании показаний конденсатора 118d, может являться цифровым в том смысле, что он может находиться на первом уровне (например, ноль вольт) ниже заданной измеренной емкости и на втором уровне (например, пять вольт) выше заданной измеренной емкости. Соответственно, выходной сигнал первого уровня может соответствовать состоянию, в котором в зоне 124 цилиндра шприца, пересекающейся с электрическим полем 128 конденсатора 118d, находится воздух, а выходной сигнал второго уровня может соответствовать состоянию, в котором в зоне 124 цилиндра шприца, пересекающейся с электрическим полем 128, находится жидкость. Соответственно, выходной сигнал емкостного детектора 112 жидкости может использоваться для индикации присутствия или отсутствия жидкости в зоне 124 цилиндра шприца, пересекающейся с электрическим полем 128. Аналогичным образом, остальные конденсаторы 118а-118с, 118e-118h также могут использоваться для определения присутствия или отсутствия жидкости в зоне 124 цилиндра шприца, которая пересекается с электрическими полями остальных конденсаторов 118а-118с, 118е-118h.
В конструкции, проиллюстрированной на Фиг.3А, конденсаторы 118a-118h расположены вдоль продольной оси 120 зоны 124 цилиндра шприца. Первый конденсатор 118а может размещаться на первом конце зоны 124 цилиндра шприца. Последний конденсатор 118h может размещаться на конце головки 122 шприца 116 напротив первого зоны 124 цилиндра шприца. Остальные шесть конденсаторов 118b-118g могут размещаться через равные промежутки между двумя концевыми конденсаторами 118а, 118h. Таким образом, каждый из конденсаторов 118a-118g может отстоять на расстояние, составляющее около 14% общей длины зоны 124 цилиндра шприца. Соответственно, емкостной детектор 112 жидкости с отдельными конденсаторами 118a-118h, действующими в цифровом режиме, может определять уровень жидкости в зоне 124 цилиндра шприца с точностью до 14% действительного уровня жидкости в зоне 124 цилиндра шприца. Например, когда обнаружено присутствие жидкости конденсаторами 118a-118f и не обнаружено присутствие жидкости конденсаторами 118g-118h, можно заключить, что зона 124 цилиндра шприца заполнена по меньшей мере на 71%, поскольку конденсаторами 118a-118f обнаружено присутствие жидкости. Кроме того, можно заключить, что зона 124 цилиндра шприца заполнена самое большее на 85%, поскольку конденсаторами 118g-118h не обнаружено присутствие жидкости. Таким образом, можно заключить, что жидкостью в шприце заполнено от 71% до 85% объема зоны 124 цилиндра шприца. Такая ситуация, когда конденсаторами (например, конденсаторами 118g-118h) по направлению к концу головки 122 шприца 116 не обнаружено присутствие жидкости, а остальными конденсаторами (например, конденсаторами 118a-118f) обнаружено присутствие жидкости, может являться признаком воздушного кармана в наконечнике головки 122 шприца 116. Следует учесть, что когда присутствие жидкости обнаружено всеми конденсаторами 118a-118h, можно сделать вывод, что шприц 116 заполнен преимущественно на 100%, а когда присутствие жидкости не обнаружено ни одним из конденсаторов 118a-118h, можно сделать вывод, что шприц 116 преимущественно пуст или не установлен на корпусе 110.
Емкостной детектор 112 жидкости может использоваться для подтверждения и/или определения объема жидкости в шприце 116 после первоначальной установки шприца 116 на корпусе 110. Например, когда объем зоны 124 цилиндра шприца составляет 125 мл, а возможные начальные объемы заполнения шприца 116 (например, количество жидкости в шприце 116 на момент установки на корпусе 110) составляют 125 мл, 100 мл, 50 мл и 0 мл, емкостной детектор 112 жидкости может различать начальный объем заполнения шприца 116, установленного на корпусе 110.
Кроме того, в некоторых вариантах осуществления настоящего изобретения отдельные конденсаторы 118a-118h могут быть неравномерно распределены по длине зоны 124 цилиндра шприца. За счет неравномерного распределения отдельные конденсаторы 118a-118h могут размещаться таким образом, что их можно использовать для определения различных известных объемов начального заполнения. Например, если использовать предыдущий пример, для равномерно распределенных отдельных конденсаторов 118а-118h может быть невозможным отличить шприц 116, заполненный на 75%, от шприца 116, заполненного на 80%. Тем не менее, за счет стратегического размещения одного из отдельных конденсаторов 118a-118h в области шприца, соответствующей заполнению, например, на 78%, этот конденсатор может использоваться, чтобы отличить шприц, заполненный на 75% (когда этот конденсатор не обнаруживает присутствие жидкости), от шприца, заполненного на 80% (когда этот конденсатор обнаруживает присутствие жидкости).
Поскольку силовая головка 50 может определять положение корпуса 92 плунжера другими средствами (например, с помощью кодера, соединенного с подающим винтом 66), описанное измерение емкостными датчиками может использоваться для подтверждения присутствия ожидаемого объема жидкости в шприце 116. В тех случаях, когда измеренный объем жидкости не согласуется с ожидаемым объемом, система может генерировать предупреждающий сигнал и/или прекращать любой текущий процесс инъекции. Такая несогласованность может являться признаком неожиданного присутствия воздуха или вакуума в зоне 124 цилиндра шприца и/или установки шприца 116 с неправильным начальным объемом жидкости (например, когда был установлен шприц 116′, а не шприц 116, как ожидалось).
Емкостной детектор 112 жидкости может содержать любое приемлемое число конденсаторов, в том числе менее или более восьми конденсаторов 118a-118h, проиллюстрированных на Фиг.3А. Количество и распределение конденсаторов может зависеть от желаемой функции емкостного детектора 112 жидкости. Например, когда желательно, чтобы емкостной детектор 112 жидкости был способен различать шприц 116 и шприц 116′, емкостной детектор 112 жидкости может содержать только два конденсатора, таких как конденсатор 118b и конденсатор 118g. В такой конфигурации конденсатор 118g может использоваться для обнаружения присутствия шприца 116 или шприца 116′, поскольку после начальной установки обоих шприцев 116, 116′ жидкость будет находиться в пределах электрического поля конденсатора 118g. Затем используют конденсатор 118b для определения типа установленного шприца (шприца 116 или шприца 116′), поскольку, если был установлен шприц 116, жидкость будет находиться в пределах электрического поля конденсатора 118b, а, если был установлен шприц 116′, жидкость не будет находиться в пределах электрического поля конденсатора 118b. Соответственно, уникальным признаком описанных вариантов осуществления настоящего изобретения может являться то, что электрическое поле, создаваемое емкостным детектором 112 жидкости, может пересекать зону 124 цилиндра шприц во множестве дискретных положений (например, вблизи конденсатора 118b и конденсатора 118g), разделенных дискретным расстоянием вдоль продольной оси 120 (например, таким как расстояние между конденсатором 118b и конденсатором 118g, которое превышает половину длины зоны 124 цилиндра шприца).
Выходной сигнал емкостного детектора 112 жидкости на основании показаний конденсаторов 118a-118h может являться аналоговым. Например, измеренная емкость на основании показаний конденсатора 118d может быть связана с объемом жидкости в пределах электрического поля 128 конденсатора 118d. В частности, измеренная емкость может уменьшаться с повышением уровня жидкости в пределах электрического поля 128, поскольку жидкость может иметь более низкую диэлектрическую постоянную, чем воздух. Соответственно, когда уровень жидкости в зоне 124 цилиндра шприца таков, что она занимает часть электрического поля 128, может осуществляться более точное (по сравнению с использованием конденсаторов 118a-118h в цифровом режиме) определение общего объема жидкости в зоне 124 цилиндра шприца. Кроме того, электрическое поле конденсатора 118d может иметь длину вдоль продольной оси 120, которая соответствует длине конденсатора 118d вдоль продольной оси 120. По существу, когда уровень жидкости в зоне 124 цилиндра шприца таков, что она занимает часть (например, меньше, чем все) электрического поля 128, емкость конденсатора 118d может использоваться для оценки общего объема жидкости в зоне 124 цилиндра шприца. В такой ситуации система может подтверждать, что значения емкости остальных конденсаторов 118а-118 с и 118e-118h согласуются с оценкой объема на основании значения емкости конденсатора 118d. Например, показания конденсаторов 118е-118h могут указывать на отсутствие жидкости, а показания конденсаторов 118а-118 с могут указывать на присутствие жидкости, что означает, что зона 124 цилиндра шприца заполнена между областью вблизи конденсатора 118d и концом шприца 116, противолежащим головке 122.
На Фиг.4А схематически проиллюстрирован шприц 116, установленный на корпусе 110′, который содержит емкостной детектор 135 жидкости. На Фиг.4Б схематически проиллюстрирован вид в поперечном разрезе шприца 116 и корпуса 110′, показанных на Фиг.4А. Емкостной детектор 135 жидкости содержит один конденсатор 136, длина которого вдоль продольной оси 120 шприца 116 соответствует длине зоны 124 цилиндра шприца. Подобно аналоговой конфигурации, описанной выше со ссылкой на Фиг.3А, емкость конденсатора 136 может изменяться с изменением объема жидкости в зоне 124 цилиндра шприца. Соответственно, об уровне жидкости в зоне 124 цилиндра шприца можно судить на основании измеренного значения емкости конденсатора 136.
Как показано на Фиг.4Б, конденсатор 136 может представлять собой две лежащие по существу в одной плоскости расположенные рядом платы 137а, 137b. Могут использоваться другие приемлемые конфигурации плат конденсатора. Например, платы конденсатора могут не лежать в одной плоскости, и в этом случае они располагаются под углом друг к другу и обращены к центру шприца. Взаимное расположение плат 137а, 137b конденсатора 136 может быть таковым, что вектор, проходящий перпендикулярно от одной из плат конденсатора, не пересекает другую плату.
Длина конденсатора 136 вдоль продольной оси 120 может являться меньшей, равной или большей, чем длина зоны 124 цилиндра шприца. Например, длина конденсатора 136 может выбираться таким образом, чтобы электрическое поле 138 конденсатора 136 проникало в зону 124 цилиндра шприца по всей длине зоны 124 цилиндра шприца. В другом примере длина конденсатора 136 может выбираться таким образом, чтобы электрическое поле 138 конденсатора 136 проникало в зону 124 цилиндра шприца на протяжении части зоны 124 цилиндра шприца, равной по меньшей мере половине общей длины зоны 124 цилиндра шприца. В такой конфигурации конденсатор 136 может соответствовать части зоны 124 цилиндра шприца и может использоваться для различения различных начальных объемов жидкости. В другой конфигурации длина конденсатора 136 может соответствовать всей длине зоны 124 цилиндра шприца, и конденсатор 136 может использоваться для определения объема жидкости в зоне 124 цилиндра шприца при любой степени заполнения от нулевой (при отсутствии жидкости) до полной.
На Фиг.5А схематически показан вид в поперечном разрезе одного из альтернативных вариантов осуществления настоящего изобретения, в котором шприц 116 установлен на корпусе (не показан), содержащем емкостной детектор 140 жидкости, который содержит резервные конденсаторы 142а-142с. Каждый из конденсаторов 142а-142с может быть сконфигурирован аналогично конденсатору 136 на Фиг.4А. В качестве альтернативы, конденсаторы 142а-142с могут представлять собой последовательность дискретных конденсаторов, аналогичных конденсаторам 118a-118h на Фиг.3А-3В. Конденсаторы 142а-142с могут быть расположены таким образом, что каждый из них соответствует одинаковому участку по длине шприца 116. В результате, каждый из конденсаторов 142а-142с может генерировать электрическое поле, способное обнаруживать жидкость в шприце 116. Соответственно, когда шприц 116 силовой головки 50 ориентирован таким образом, что направлен прямо вверх или прямо вниз, каждый из конденсаторов 142а-142с может независимо измерять одинаковый уровень жидкости в шприце 116.
Такие независимые измерения могут использоваться, чтобы отфильтровывать определенные аномальные результаты измерений. В этих целях автоматический инжектор 40 может сравнивать измеренную емкость трех конденсаторов 142а-142с и отфильтровывать аномальные показания. Например, если из-за какого-либо постороннего предмета, такого как рука оператора или электронное устройство, получено неверное показание конденсатора 142b, тогда как на показания остальных двух конденсаторов 142а, 142с не повлиял посторонний предмет, автоматический инжектор 40 может игнорировать ошибочное показание конденсатора 142b. Автоматический инжектор 40 может сравнивать показания каждого из конденсаторов 142а-142с и определять, что два конденсатора 142а, 142с имеют емкость, соответствующую определенному уровню жидкости, а емкость конденсатора 142b соответствует отличающемуся уровню жидкости (из-за присутствия постороннего объекта). В такой ситуации автоматический инжектор 40 может не учитывать показание конденсатора 142b и определять объем жидкости на основании емкости двух согласующихся конденсаторов 142а, 142с. Такая ситуация наглядно проиллюстрирована на Фиг.6.
На Фиг.6 представлена диаграмма 600, на которой по вертикальной оси 602 отложена измеренная емкость (С), а по горизонтальной оси 604 отложено время (t). Диаграмма 600 иллюстрирует период стационарного режима действия (например, без перемещения плунжера) от t0 до t3. В период от t0 до t3 сигнал 642а конденсатора 142а и сигнал 642с конденсатора 142с являются постоянными, а уровень сигнала 642b конденсатора 142b снижается в период от t1 до t2. Поскольку соответствующее снижение уровня сигналов 642а и 642с конденсаторов 142а и 142с, соответственно, не наблюдается, автоматический инжектор 40 (или любая приемлемая часть автоматического инжектора 40) может предположить, что сигнал 642b конденсатора 142b за время между t1 и t2 является ошибочным, и может игнорировать или отбросить сигнал 642b за время между t1 и t2. Для оценки объема жидкости в шприце 116 за время между t1 и t2 автоматический инжектор 40 может предпочтительно (например, исключительно) полагаться на сигналы 642а, 642с конденсаторов 142а и 142с. Следует отметить, что каждый из сигналов 642а-642с за время, например, между t0 и t1 может отображать одинаковое значение объема жидкости в шприце 116, несмотря на различающиеся значения емкости. Значения могут различаться из-за конфигурации конденсаторов и/или их положения относительно измеряемого объема жидкости. В другой конфигурации конденсаторы 142а-142с могут выбираться, размещаться и/или калиброваться таким образом, чтобы их показания были сходными друг с другом при любом заданном объеме жидкости в шприце 116. В автоматическим инжекторе 40 могут быть предусмотрены другие известные специалистам применимые методы фильтрации показаний при использовании резервных датчиков.
На Фиг.7 показана диаграмма 700, на которой, как и на диаграмме 600, по вертикальной оси 702 отложена измеренная емкость (С), а по горизонтальной оси 704 отложено время (t). Диаграмма 700 иллюстрирует состояние, когда объем жидкости в шприце 116 изменяется, а каждый из сигналов 742а, 742b и 742с конденсаторов 142а, 142b, и 142с, соответственно, отслеживает изменение объема. Поскольку скорость изменения всех сигналов является одинаковой, автоматический инжектор 40 может в любое заданное время интерпретировать каждый сигнал (или сочетание сигналов), чтобы точно отобразить объем жидкости в шприце 116. Как и на диаграмме 600, уровни сигналов 742а-742с могут различаться из-за конфигурации конденсаторов и/или их положения относительно измеряемого объема жидкости.
Как показано на Фиг.5А, конденсаторы 142а-142с могут быть установлены на протяжении опоры 144, форма которой может следовать контуру шприца 116. Такая конфигурация может быть выгодной, поскольку отдельные конденсаторы 142а-142с могут находиться в непосредственной близости от шприца 116. Опора 144 и отдельные конденсаторы 142а-142с могут быть сконструированы методами изготовления гибких РСВ и/или путем монтажа плат конденсаторов 142а-142с на криволинейной опоре 144. Для создания криволинейной опоры 144 может использоваться любой другой приемлемый способ конструирования, и могут использоваться конденсаторы 142а-142с, показанные на Фиг.5А.
На Фиг.5Б проиллюстрирована альтернативная конфигурация, в которой емкостной детектор 146 жидкости содержит отдельные конденсаторы 148a-148d, размещенные на в целом плоских опорах 150а, 150b. За счет плоской конфигурации опор 150а, 150b и размещенных на них отдельных конденсаторов 148a-148d емкостной детектор 146 жидкости может быть изготовлен методами изготовления стандартных РСВ или любым другим применимым методом.
Как емкостной детектор 140 жидкости, так и емкостной детектор 146 жидкости могут размещаться (например, путем инкапсуляции) внутри соответствующего корпуса шприца (не показан) аналогично емкостному детектору 112 жидкости в шприце корпус 110, как описано со ссылкой на Фиг.3А-3В. Может использоваться любое приемлемое число резервных конденсаторов.
Далее будет описаны способы эксплуатации систем инъекции, содержащих корпус шприца с емкостным детектором жидкости, таких как описаны выше со ссылкой на Фиг.3А-5Б. Первой стадией такого способа может являться установка шприца 116 на устройство инъекции системы инъекции. Системой инъекции может являться, например, описанный автоматический инжектор 40. Устройством инъекции может являться, например, описанная силовая головка 50. Установка шприца 116 на устройство инъекции может включать размещение шприца 116 в корпусе (например, корпусе 110 или корпусе 110′) таким образом, чтобы шприц 116 размещался в корпусе вблизи емкостного детектора жидкости (например, емкостного детектора 112 жидкости, емкостного детектора 135 жидкости, емкостного детектора 140 жидкости или емкостного детектора 146 жидкости). Установка шприца 116 на устройство инъекции может включать соединение толкателя 74 устройства инъекции с корпусом 92 плунжера шприца 116. С этой целью толкатель 74 устройства инъекции может быть способен выдвигать и/или втягивать корпус 92 плунжера шприца 116.
Установка шприца 116 на устройство инъекции может включать определение объема и/или типа жидкости в шприце 116. Эта стадия определения может осуществляться отдельно от обнаружения жидкости в шприце 116 с помощью емкостного детектора жидкости. Эта стадия определения может включать сообщение объема и/или типа жидкости в шприце 116 автоматическому инжектору 40 (или его компоненту) любыми приемлемыми средствами. Например, оператор может вручную вводить объем и/или тип жидкости в шприце 116 в пользовательский интерфейс 11 автоматического инжектора 40. В качестве дополнительного примера, автоматический инжектор 40 может быть способен считывать признак шприца 116, чтобы определять объем и/или тип жидкости в шприце 116. Признаком может являться визуальный индикатор, такой как штриховой код или другая маркировка, и/или признак может представлять собой радиометку, связанную со шприцем 116.
После установки шприца 116 на устройство инъекции может осуществляться измерение емкостными датчиками присутствия жидкости в установленном шприце 116. Измерение емкостными датчиками может осуществляться, когда силовая головка 50 направлена вверх или вниз. При такой ориентации (например, вверх или вниз) любая жидкость в шприце 116 может распределяться таким образом, что любая плоскость поперечного сечения содержимого, перпендикулярная продольной оси, может являться однородной (например, только жидкость или только воздух). Такая ориентация может облегчать обнаружение воздуха в шприце 116. Кроме того, измерение емкостными датчиками может осуществляться, когда силовая головка 50 расположена под углом (например, относительно ориентации вверх или вниз), при этом система инъекции учитывает, что, если в шприце 116 между корпусом 92 плунжера и головкой 122 находится воздух, поверхность контакта жидкости и воздуха в шприце 116 может находиться под углом, соответствующим углу силовой головки 50.
В случае емкостного детектора жидкости, который содержит множество дискретных конденсаторов, такого как емкостной детектор 112 жидкости, показанный на Фиг.3А, измерение емкостными датчиками может включать определение присутствия жидкости в установленном шприце 116 с помощью первой части множества емкостных датчиков 118а-118h и определение отсутствия жидкости в установленном шприце 116 с помощью второй части множества емкостных датчиков 118а-118h. Такое измерение емкостными датчиками может осуществляться до инъекции пациенту какой-либо жидкости из шприца 116. После измерения емкостными датчиками может осуществляться оценка общего объема жидкости в шприце 116 на основании результатов измерения емкостными датчиками. Такая оценка может включать, например, деление числа емкостных датчиков, определяющих присутствие жидкости, на общее число емкостных датчиков емкостного детектора 112 жидкости, чтобы оценить процентное заполнение шприца 116. Кроме того, такая оценка может включать, например, проверку по справочной таблице общего объема жидкости в шприце 116, который соответствует показаниям нескольких емкостных датчиков, определяющих присутствие жидкости.
В случае емкостного детектора жидкости, который содержит один протяженный конденсатор, такой как емкостной детектор 135 жидкости, показанный на Фиг.4А и 4Б, измерение емкостными датчиками может включать определение значения емкости между отдельными платами конденсатора 136. Затем полученное значение емкости может использоваться системой система инъекции для оценки объема жидкости в шприце 116. Эта оценка может осуществляться путем вычисления и/или проверки значения емкости по справочной таблице.
После оценки общего объема жидкости в шприце 116 на основании результатов измерения емкостными датчиками система инъекции может подтверждать, что расчетный общий объем жидкости в шприце 116 соответствует объему жидкости, определенному на стадии определения (например, введенному вручную, введенному автоматически).
Оценка общего объема жидкости на основании результатов измерения емкостными датчиками также может учитывать тот факт, что может существовать ограниченное число различных начальных объемов жидкости в шприце. Например, может существовать только ограниченное число дискретных начальных объемов жидкости в шприце 116, применимом для установки на корпусе 110 шприца. Например, для установки на корпусе 110 шприца могут использоваться шприцы с начальными объемами заполнения только 125 мл, 100 мл, 50 мл и 0 мл (например, пустые). В таких условиях емкостной детектор 112 жидкости может требоваться только для первоначального различения упомянутых отличающихся начальных объемов.
Другой стадией способа эксплуатации системы инъекции, которая содержит емкостной детектор жидкости, может являться перемещение толкателя 74 силовой головки 50 с целью перемещения корпуса 92 плунжера шприца 116. При перемещении корпуса 92 плунжера емкостной детектор жидкости может множество раз осуществлять определение емкостными датчиками присутствия жидкости в зоне 124 цилиндра шприца. Кроме того, система инъекции может оценивать объем жидкости в шприце 116 при каждом из множества определений емкостными датчиками присутствия жидкости в зоне 124 цилиндра шприца. В результате, при перемещении корпуса 92 плунжера может быть известен уровень жидкости в шприце 116. Измерение емкостными датчиками и оценка общего объема могут осуществляться непрерывно при перемещении корпуса 92 плунжера. Перемещением корпуса 92 плунжера может являться втягивание корпуса 92 плунжера (например, с целью втягивания жидкости в зону 124 цилиндра шприца) или выдвижение корпуса 92 плунжера (например, с целью выпуска жидкости из зоны 124 цилиндра шприца).
За счет измерения уровней жидкости емкостными датчиками при втягивании корпуса 92 плунжера система инъекции может подтверждать, что в зону 124 цилиндра шприца втягивается жидкость. Например, системе инъекции может становиться известным положение корпуса 92 плунжера (например, посредством кодера, соединенного с подающим винтом 66), что позволяет ей вычислять ожидаемый объем жидкости в зоне 124 цилиндра шприца, соответствующий положению корпуса 92 плунжера. Если объем жидкости, определенный путем измерения емкостными датчиками жидкости в зоне 124 цилиндра шприца, не согласуется с объемом, ожидаемым на основании положения корпуса 92 плунжера, система инъекции может подавать предупреждающий сигнал и/или прекращать перемещение корпуса 92 плунжера. Такое состояние может являться показателем того, что в зону 124 цилиндра шприца между корпусом 92 плунжера и головкой 122 шприца 116 попал воздух. Причиной этого может являться протечка в системе инъекции и/или пустой источник жидкости.
На любой из перечисленных стадий, на которых осуществляется определение емкостными датчиками присутствия жидкости, измерение может дополнительно включать определение присутствия жидкости в зоне 124 цилиндра шприца с помощью первого, второго и третьего емкостных датчиков, образующих конфигурацию с резервированием. В связи с этим способ может дополнительно содержать обнаружение ошибочных показаний по меньшей мере частично на основании сравнения выходных сигналов первого, второго и третьего емкостных датчиков.
Логическая схема 39 для определения уровня жидкости может быть реализована любым применимым способом, в том числе без какого-либо ограничения в любом применимом программном обеспечении, программно-аппаратном обеспечении или аппаратном обеспечении с использованием одной или несколько платформ, одного или нескольких процессоров, памяти любого применимого типа, любого одного компьютера любого применимого типа или множества компьютеров любого применимого типа, соединенных любым применимым способом, или любого их сочетания. Логическая схема 39 для определения уровня жидкости может быть реализована в любом одном местоположении или множестве местоположений, соединенных любым применимым способом (например, посредством сети любого типа).
Изменения сигналов емкостных датчиков вследствие взаимодействия с человеком вблизи зоны 124 цилиндра шприца могут использоваться как входные команды автоматическому инжектору 40. Пример одного из типов взаимодействия с человеком, которое может служить входной командой автоматическому инжектору 40, проиллюстрирован на Фиг.8, на которой схематически показан шприц 800, установленный на автоматическим инжекторе 40 (не показан на Фиг.8). Пользователь может пожелать отдать автоматическому инжектору 40 команду выполнения операции очистки, которая влечет перемещение толкателя 20 (не показан на Фиг.8) вперед с целью очистки шприц 800 от любой находящейся в ней жидкости. Чтобы отдать автоматическому инжектору 40 команду очистки, пользователь может поместить большой палец и указательный палец одной руки с каждой стороны шприца 800 вблизи конца 802 шприца 800, противолежащего головке 804. Это положение пальцев проиллюстрировано окружностями 806 и 808 вблизи шприца 800. Затем пользователь может перемещать большой палец и указательный палец по шприцу в направлении головки 804, как показано стрелками 810 и 812 в положение пальцев, проиллюстрированное окружностями 814 и 816. Это перемещение имитирует действие толкателя 20 при операции очистки и тем самым может являться интуитивным и легко запоминаемым пользователем.
На Фиг.9 проиллюстрирован емкостный детектор воздействий со стороны пользователя в виде примера расстановки 900 конденсаторов, которые могут использоваться для обнаружения воздействий со стороны пользователя, проиллюстрированного на Фиг.8. Расстановка 900 включает центральный конденсатор 902, расположенный параллельно возможной ориентации шприца 800 (фантомно показан на Фиг.9) при установке на автоматическом инжекторе 40. Центральный конденсатор 902 может содержать две лежащие преимущественно в одной плоскости расположенных рядом платы 902а, 902b, аналогичные лежащим преимущественно в одной плоскости платам 137а, 137b на Фиг.4Б. Расстановка 900 конденсаторов дополнительно включает множество периферийных конденсаторов (конденсаторов 904, 906, 908, 910, 912, 914, 916 и 918), размещающихся с каждой стороны центрального конденсатора 902. Периферийные конденсаторы могут служить для обнаружения положения и/или перемещения пальцев пользователя, когда пальцы пользователя (в контексте изобретения большой палец считается пальцем) находятся и/или перемещаются с одной и сторон шприца 800. Каждый из периферийных конденсаторов может включать две лежащие преимущественно в одной плоскости расположенные рядом платы (каждая из которых помечена как а или b на Фиг. 9). Периферийные конденсаторы могут быть расположены и сконфигурированы таким образом, чтобы автоматический инжектор 40 был способен различать, с какой стороны шприца 800 находиться палец. Так, палец, находящийся с правой стороны (при ориентации согласно Фиг.8 и 9) шприца 800 вблизи периферийного конденсатора 904, может быть обнаружен как находящийся с правой стороны шприца 800, а палец, находящийся с левой стороны шприца 800 вблизи периферийного конденсатора 906, может быть обнаружен как находящийся с левой стороны шприца 800. В разновидностях конфигурации, проиллюстрированной на Фиг.9, может использоваться больше или меньше периферийных конденсаторов. Кроме того, каждый конденсатор может находиться в любом приемлемом положении. Помимо этого, в разновидностях расстановки 900 может отсутствовать центральный конденсатор 902.
Согласно примеру расстановки 900 конденсаторов, проиллюстрированному на Фиг.9, положение пальца пользователя с одной из сторон шприца 800 может обнаруживаться аналогичному тому, как это описано выше применительно к обнаружению уровня жидкости. Соответственно, емкость между платами а и b периферийного конденсатора 904 может иметь первое значение, когда палец пользователя находится в области электрического поля периферийного конденсатора 904, и второе значение в отсутствие пальца пользователя. Причиной различных значений может являться различие между диэлектрическими свойства воздуха и пальца пользователя. По мере того, как пользователь перемещает палец по правой стороне шприца 800 от места вблизи периферийного конденсатора 904 в направлении периферийного конденсатора 908, считываемые электрические поля периферийного конденсатора 904 и периферийного конденсатора 908 могут изменяться (например, в противоположных направлениях), и эти изменения могут интерпретироваться как перемещение пальца по правой стороне шприца 800. Соответственно, расстановка 900 конденсаторов может использоваться для обнаружения присутствия и перемещения пальцев пользователя по сторонам шприца 800. Так, может обнаруживаться перемещение пальцев пользователя, описанное со ссылкой на фиг.8, и использоваться как входная команда автоматическому инжектору 40 инициировать, например, операцию очистки.
Автоматический инжектор 40 может контролировать специфические ответные сигналы для определения воздействий со стороны пользователя. На Фиг.10 проиллюстрирована группа ответных сигналов, которые могут генерироваться, когда пользователь перемещает пальцы, как показано на Фиг.8, чтобы автоматический инжектор 40 выполнил операцию очистки. Каждая диаграмма на Фиг.10 иллюстрирует сигнал, который может детектироваться на каждом соответствующим образом пронумерованном конденсаторе, показанном на Фиг.9. Соответственно, в момент ta пользователь может поместить большой палец и указательный палец в положения, проиллюстрированные окружностями 806 и 808, и считываемые емкости конденсаторов 904 и 906 могут изменяться, что отображено изменением емкости (с) на соответствующих диаграммах сар904 и сар906 в момент ta. Аналогичным образом, емкость, измеренная центральным конденсатором 902, может изменяться в присутствии большого пальца и указательного пальца, как показано на диаграмме сар902 в момент ta. По мере того, как пальцы пользователя перемещаются вдоль цилиндра шприца в направлении стрелок 810 и 812 на Фиг.8, считываемые емкости периферийных конденсаторов могут изменяться. Например, в момент tb, когда большой палец и указательный палец перемещаются от конденсаторов 904 и 906 в направлении конденсаторов 908 и 910, изменяются считываемые емкости обоих наборов конденсаторов, как показано на диаграммах сар904, сар908, сар906 и сар910. Аналогичные изменения могут происходить в моменты tc и td. Этот процесс постепенно продолжается, как показано на диаграммах сар916 и сар918, по мере того, как большой палец и указательный палец пользователя перемещаются в положения, проиллюстрированные окружностями 814 и 816. Кроме того, пользователь может задержаться в положениях, проиллюстрированных окружностями 814 и 816, и считываемые емкости конденсатора 916 и конденсатора 918 могут наблюдаться в течение относительно более длительного времени, чем у других периферийных конденсаторов. Это проиллюстрировано на диаграммах сар916 и сар918, на которых показана увеличенная длительность сигнала между моментами td и te по сравнению с другими диаграммами периферийных конденсаторов. Показано, что изменение емкости, измеренное центральным конденсатором 902, может длиться на протяжении всего времени нахождения пальцев пользователя вдоль шприца 800.
Для сведения к минимуму непреднамеренных очисток автоматическому инжектору 40 могут требоваться соответствующие ответные сигналы соответствующих конденсаторов в соответствующие моменты. Например, если какой-либо из сигналов, показанных на Фиг.10, отсутствует, имеет очередность, отличающуюся от очередности на Фиг.10, или если длительность сигналов, отклоняется от заданной длительности на заданную величину, автоматический инжектор 40 не может интерпретировать такие сигналы как команду выполнения операции очистки. Кроме того, чтобы определять, следует ли автоматическому инжектору 40 выполнять операцию очистки после приема сигналов, проиллюстрированных на фиг.10, также могут использоваться другие факторы. Например, автоматический инжектор 40 может содержать датчик наклона, и функция очистки может выполняться только при наклоненном вверх шприце 800 в автоматическим инжекторе 40. В качестве другого примера, автоматический инжектор 40 не может выполнять операцию очистки, несмотря на прием сигналов, проиллюстрированных на фиг.10, если в данный момент автоматический инжектор 40 выполняет инъекцию.
Для отдачи входных команд автоматическому инжектору 40 могут использоваться другие воздействия вследствие взаимодействия с человеком вблизи зоны 124 цилиндра шприца. Такие команды, как наполнение шприца, повышение или снижение скорости инъекции, экстренная остановка, извлечение шприца и/или запрос данных радиометки, могут вводиться посредством перемещения или размещения пальца или пальцев пользователя вдоль шприца 800. Путем такого перемещения или размещения пальцев может вводиться любая другая применимая команда. Хотя проиллюстрированное на Фиг.8 перемещение пальцев имеет целью отдать автоматическому инжектору 40 команду выполнения очистки, оно может использоваться в качестве входной команды автоматическому инжектору 40 выполнения любой применимой операции. Например, вместо ранее описанной операции очистки проиллюстрированное на Фиг.8 перемещение пальцев может использоваться для отдачи автоматическому инжектору 40 команды начала инъекции. В другом примере проиллюстрированное на Фиг.8 перемещение пальцев может использоваться для ввода команд, при этом выполняемая функция зависит от контекста. Иными словами, одно и то же перемещение может использоваться для ввода различных контекстно-зависимых команд, как проиллюстрированное на Фиг.8 перемещение пальцев, используемое для ввода команды очистки, когда шприц 800 направлен вверх, и другой отличающейся команды, когда шприц направлен вниз.
Расстановка 900 конденсаторов может использоваться для распознавания воздействий со стороны пользователя, как описано выше. Кроме того, расстановка 900 конденсаторов может использоваться для выполнения описанных функций определения уровня жидкости. Помимо этого, другие конфигурации конденсаторов, рассмотренные применительно к определению уровня жидкости, могут использоваться для распознавания воздействий со стороны пользователя аналогично тому, как это описано со ссылкой на расстановку 900 конденсаторов. Соответственно, для определения уровней жидкости, распознавания воздействий со стороны пользователя или как определения уровней жидкости, так и распознавания воздействий со стороны пользователя, когда это уместно, может использоваться любая конкретная расстановка конденсаторов.
Интерпретация сигналов емкостных датчиков, используемых для описанного распознавания воздействий со стороны пользователя, может осуществляться той же логической схемой, которая определяет уровни жидкости в шприце (например, логической схемой 39 для определения уровня жидкости, показанной на Фиг.1). В качестве альтернативы, интерпретация сигналов емкостных датчиков, используемых для описанного распознавания воздействий со стороны пользователя, может осуществляться логической схемой для определения воздействий со стороны пользователя. Такая логическая схема для определения воздействий со стороны пользователя может быть реализована отдельно от логической схемы 39 для определения уровня жидкости, показанной на Фиг.1.
Вышеизложенное описание настоящего изобретения представлено в целях иллюстрации и описания. Кроме того, описание не имеет целью ограничить настоящее изобретение раскрытыми в нем формами. Соответственно, в объем настоящего изобретения входят разновидности и модификации, сообразные с изложенными идеями, и релевантный уровень техники. Описанные варианты осуществления имеют целью пояснить лучшие способы практического использования изобретения и помочь специалистам в данной области техники использовать изобретение в таких и других вариантах осуществления и с различными модификациями, требуемыми для конкретного применения(-й) или использования(-й) настоящего изобретения. Предполагается, что в прилагаемую формулу изобретения включены альтернативные варианты осуществления, насколько это допустимо с учетом известного уровня техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИНЪЕКЦИИ КОНТРАСТНОЙ СРЕДЫ ДЛЯ КОНТРОЛЯ ИНТЕНСИВНОСТИ СИГНАЛА ВО ВРЕМЯ МАГНИТНО-РЕЗОНАНСНОЙ АНГИОГРАФИИ | 2012 |
|
RU2603823C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДАННЫМИ ОБ ИНЪЕКЦИИ КОНТРАСТНЫХ ВЕЩЕСТВ | 2012 |
|
RU2634297C2 |
| АДАПТЕР С УБИРАЮЩЕЙСЯ ИГЛОЙ ДЛЯ БЕЗОПАСНОГО ШПРИЦА | 2014 |
|
RU2652748C2 |
| СИСТЕМА ИНЪЕКЦИИ МЕДИЦИНСКИХ ЖИДКОСТЕЙ | 2011 |
|
RU2609808C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИНЪЕКЦИЙ С ИНЪЕКЦИОННЫМ КАРТРИДЖЕМ И ПРИВОДНОЙ МЕХАНИЗМ ТАКОГО УСТРОЙСТВА | 2013 |
|
RU2649473C2 |
| МНОГОЖИДКОСТНОЕ НАСОСНОЕ УСТРОЙСТВО НЕПРЕРЫВНОГО ДЕЙСТВИЯ, ПРИВОДНАЯ И ИСПОЛНИТЕЛЬНАЯ СИСТЕМА И СПОСОБ | 2012 |
|
RU2624327C2 |
| УСТРОЙСТВО ДЛЯ ПОДКОЖНОЙ ДОСТАВКИ ТЕКУЧЕГО ЛЕКАРСТВЕННОГО СРЕДСТВА | 2018 |
|
RU2765171C2 |
| УСТРОЙСТВО ИНЖЕКТОРА ЖИДКОСТИ, СПОСОБ ВВЕДЕНИЯ ЖИДКОГО ЛЕКАРСТВЕННОГО СРЕДСТВА | 1993 |
|
RU2127131C1 |
| СИСТЕМА ВВЕДЕНИЯ ЖИДКОСТИ, ИМЕЮЩАЯ РАЗЛИЧНЫЕ СИСТЕМЫ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕДУРОЙ ИНЪЕКЦИИ | 2012 |
|
RU2618159C2 |
| УСТРОЙСТВО ДЛЯ ЦЕЛЕВОЙ ДОСТАВКИ МЕДИЦИНСКОГО ИМПЛАНТАТА | 2013 |
|
RU2648873C2 |
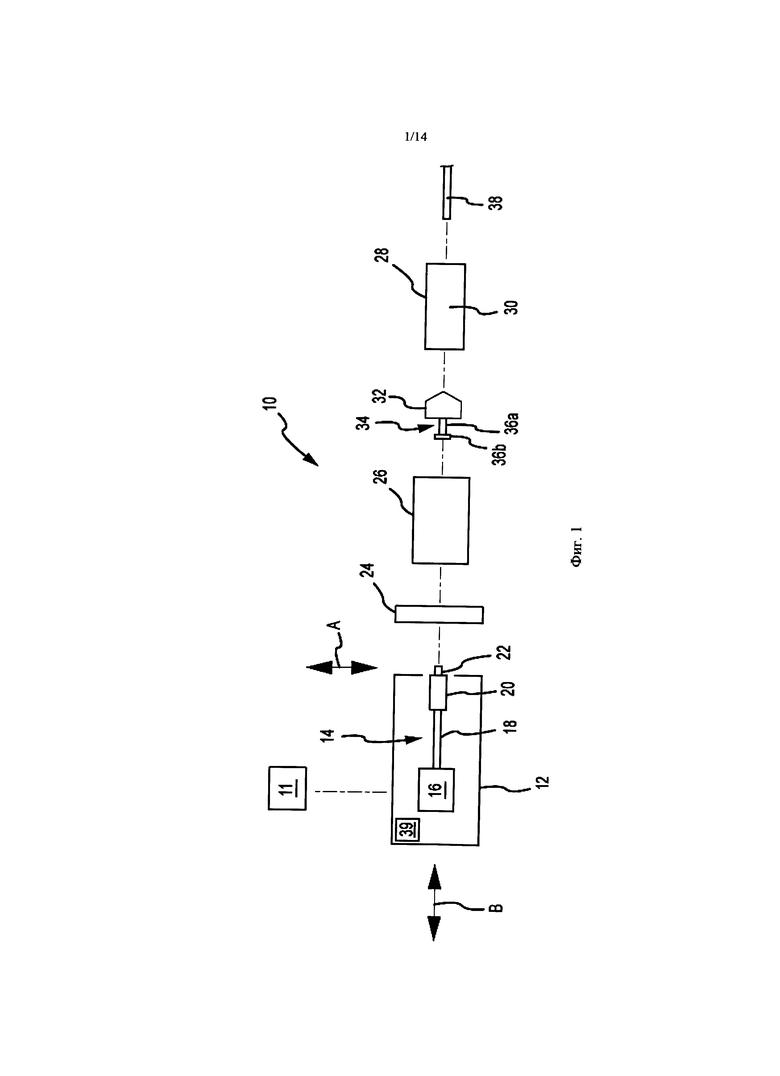
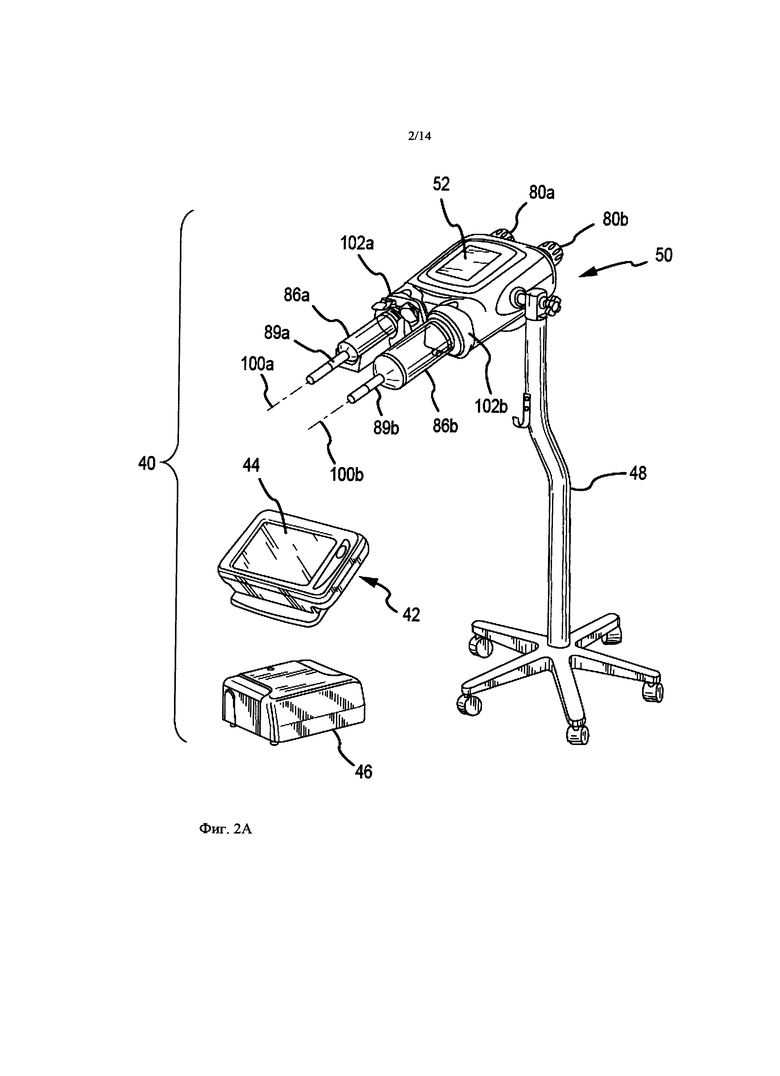
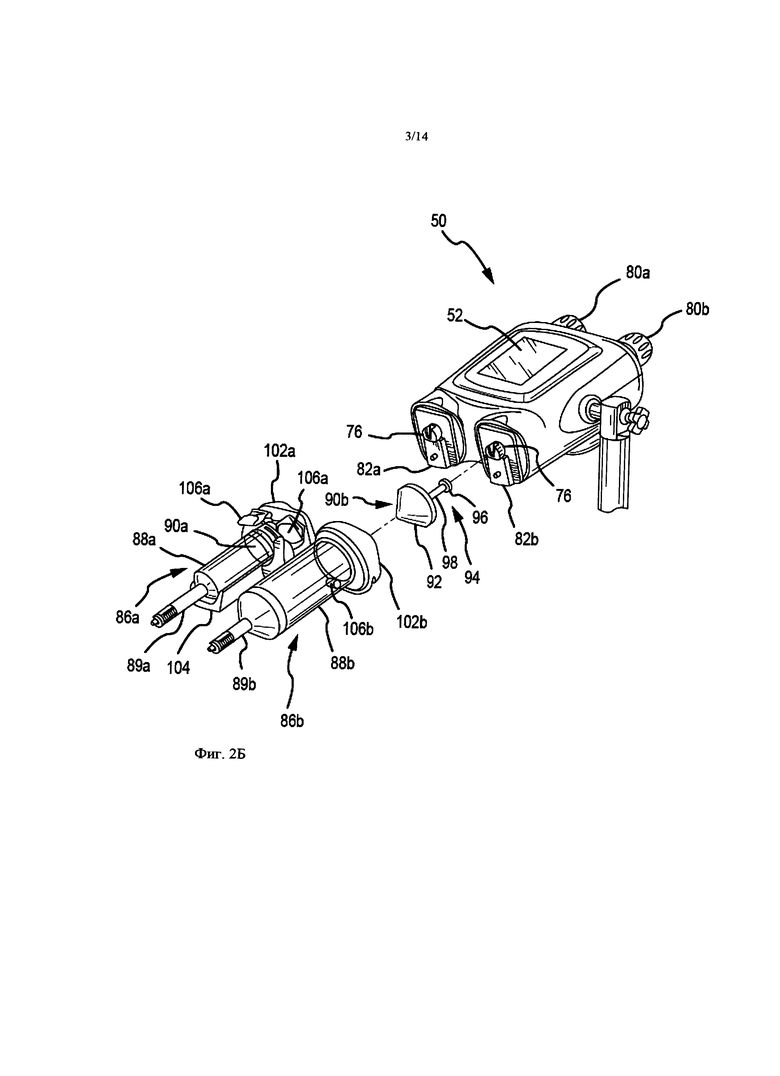
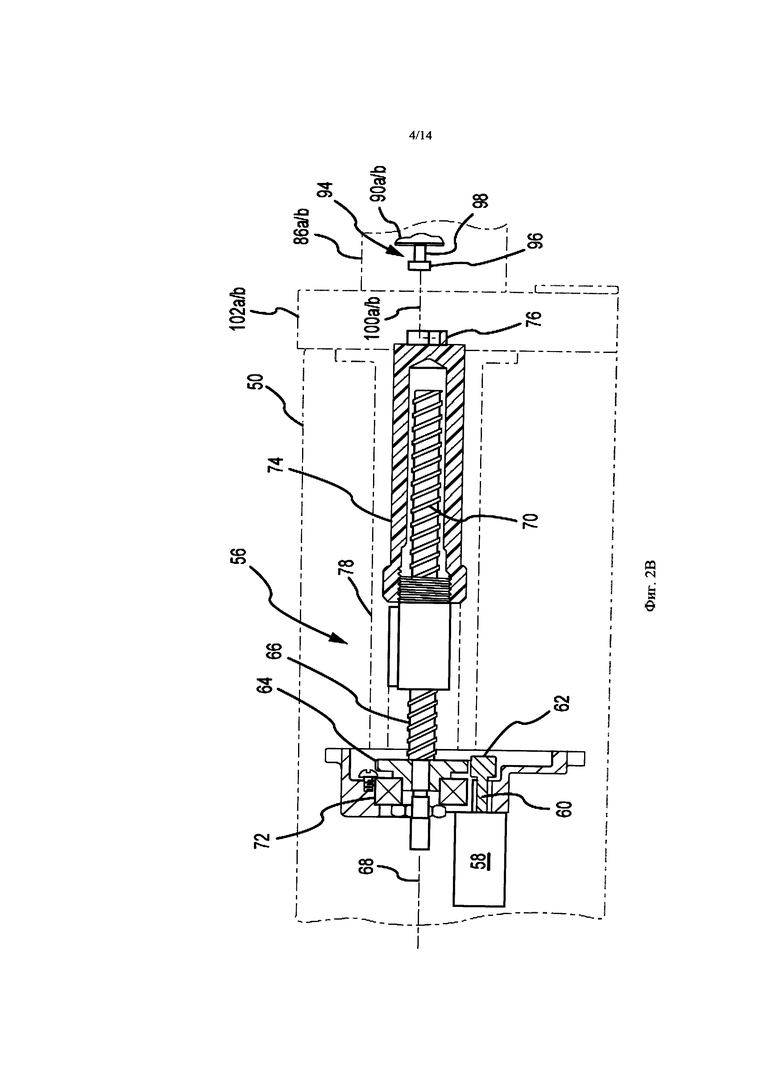
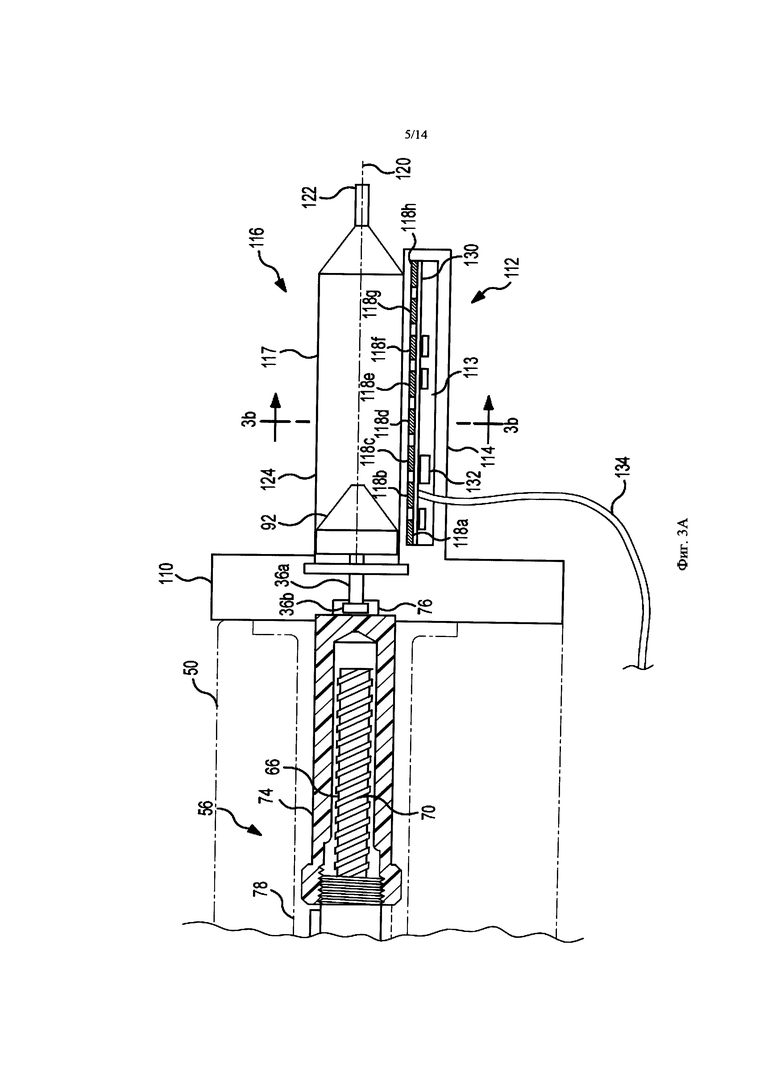
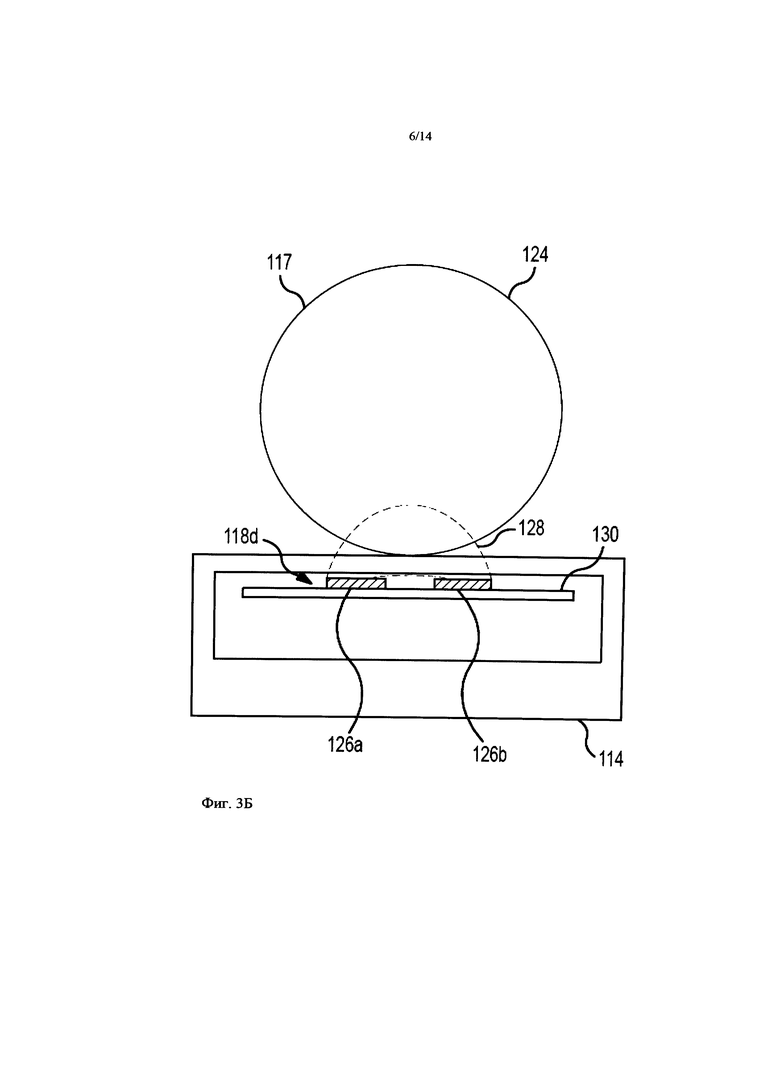
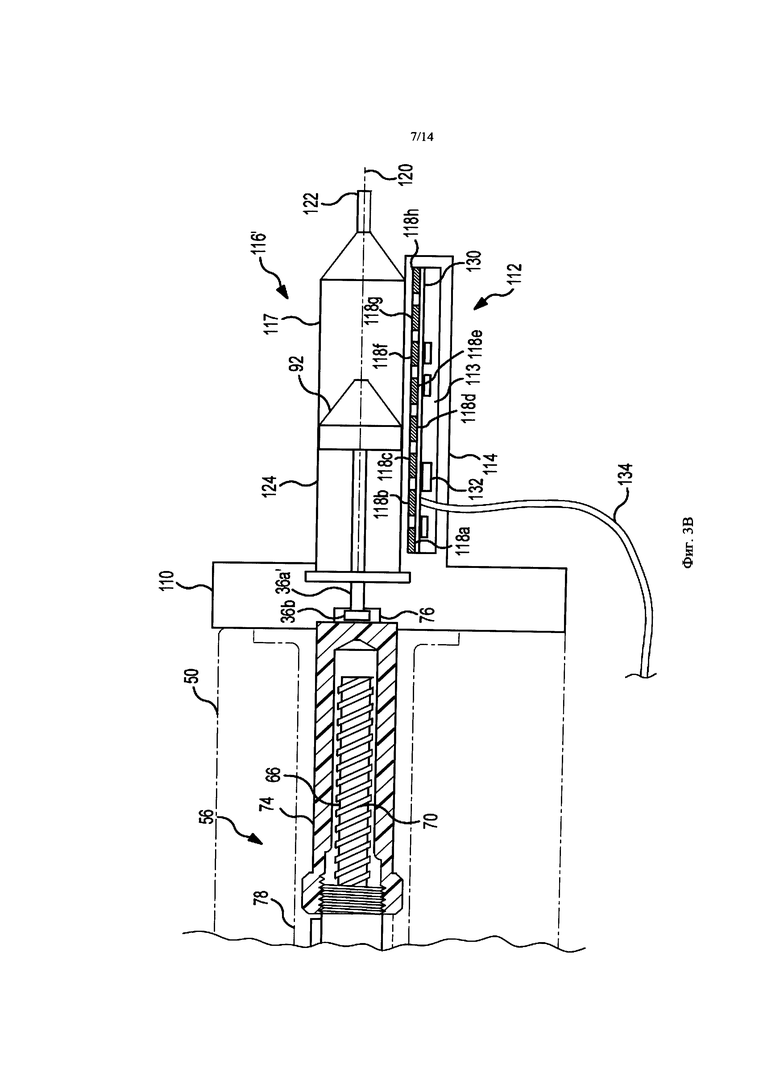
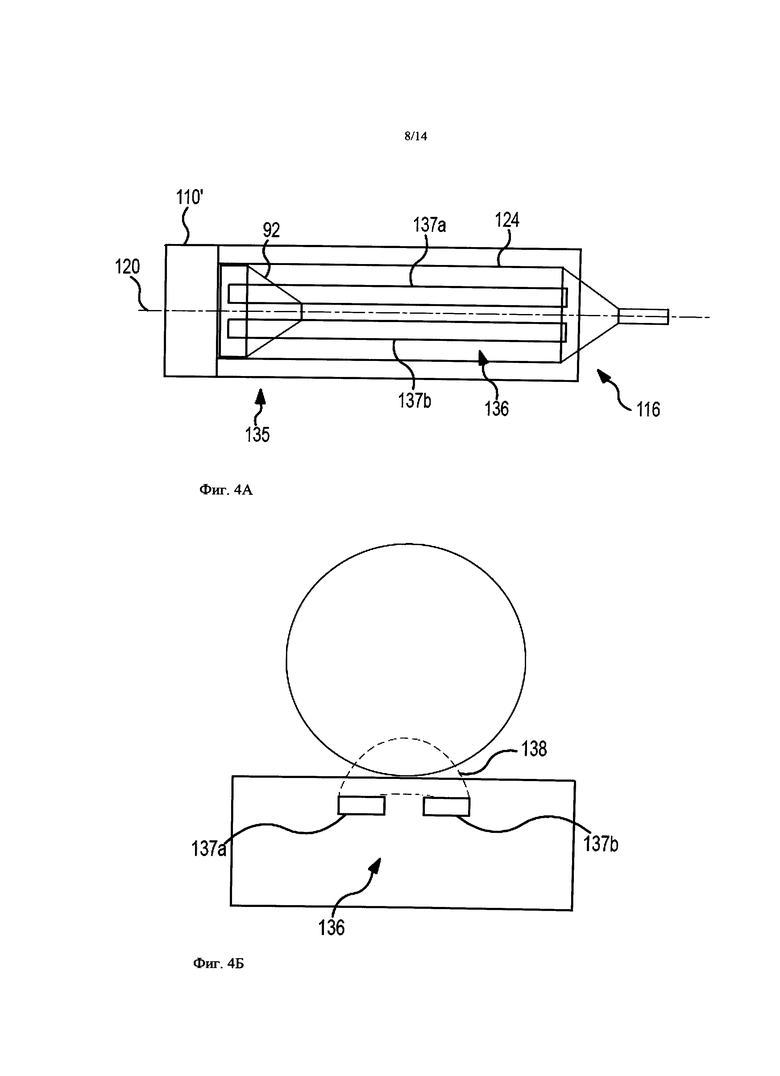
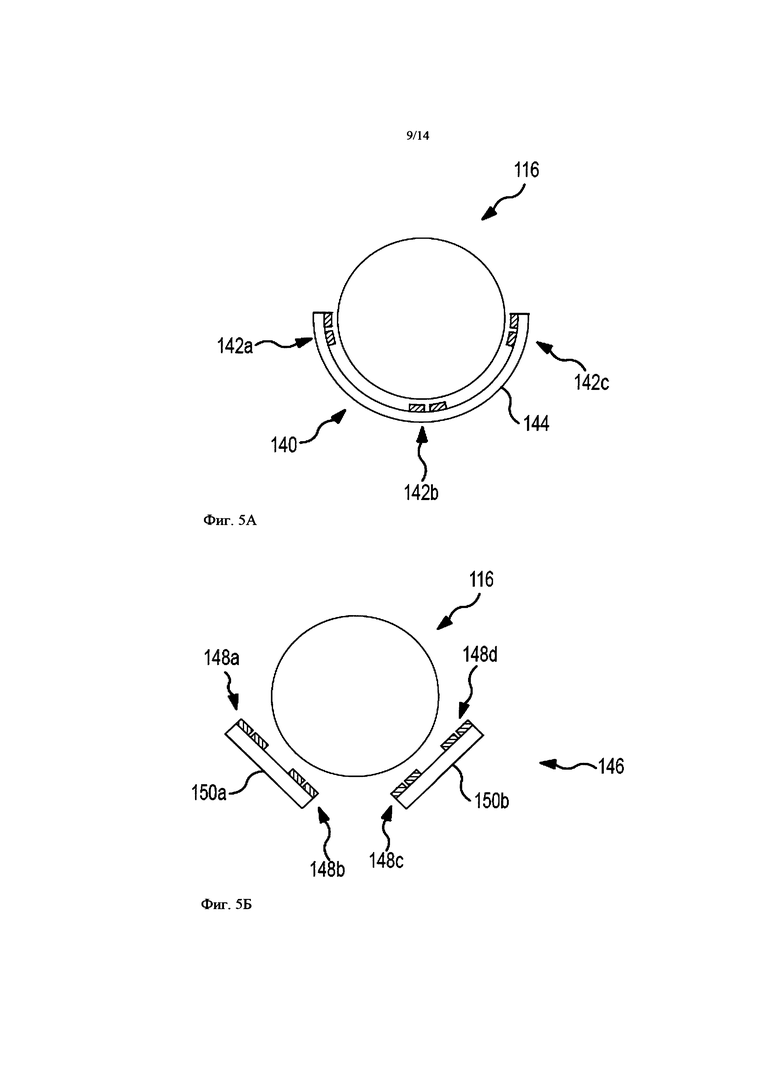
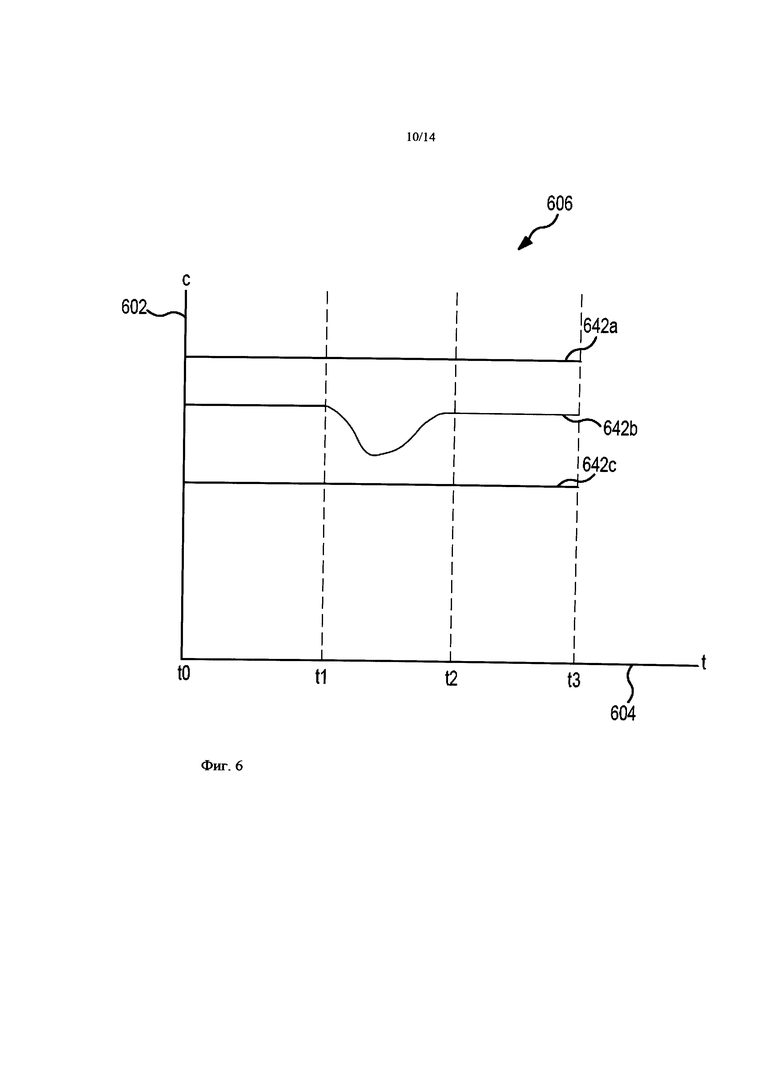
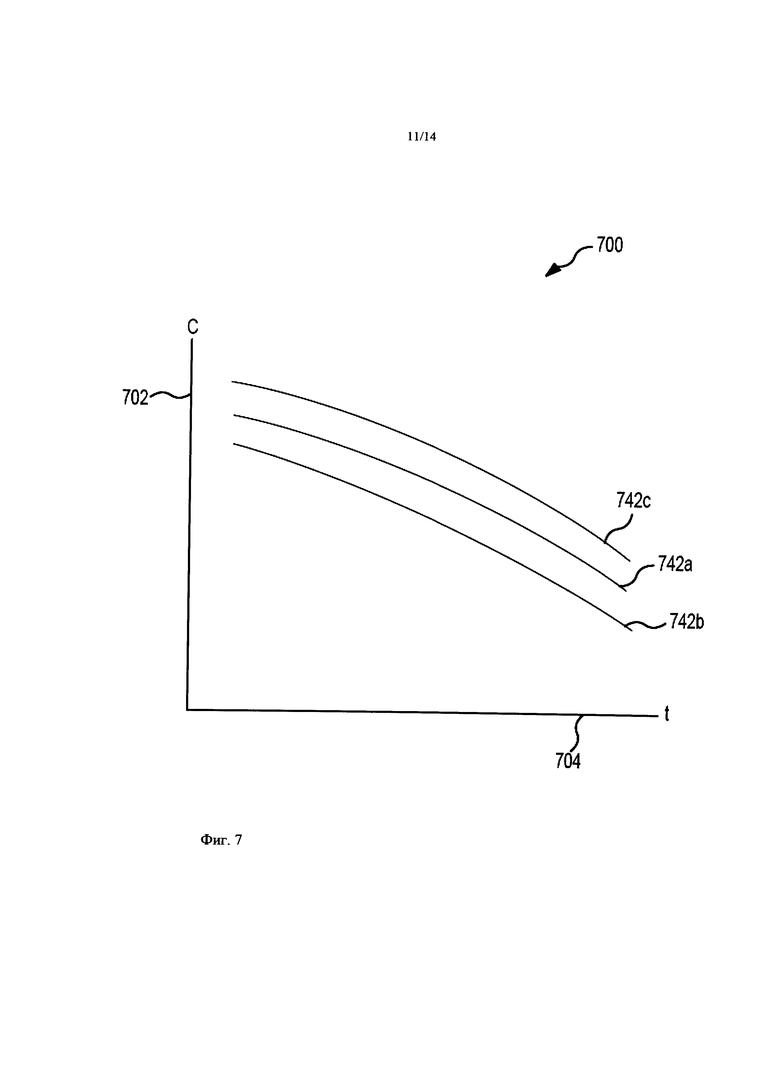
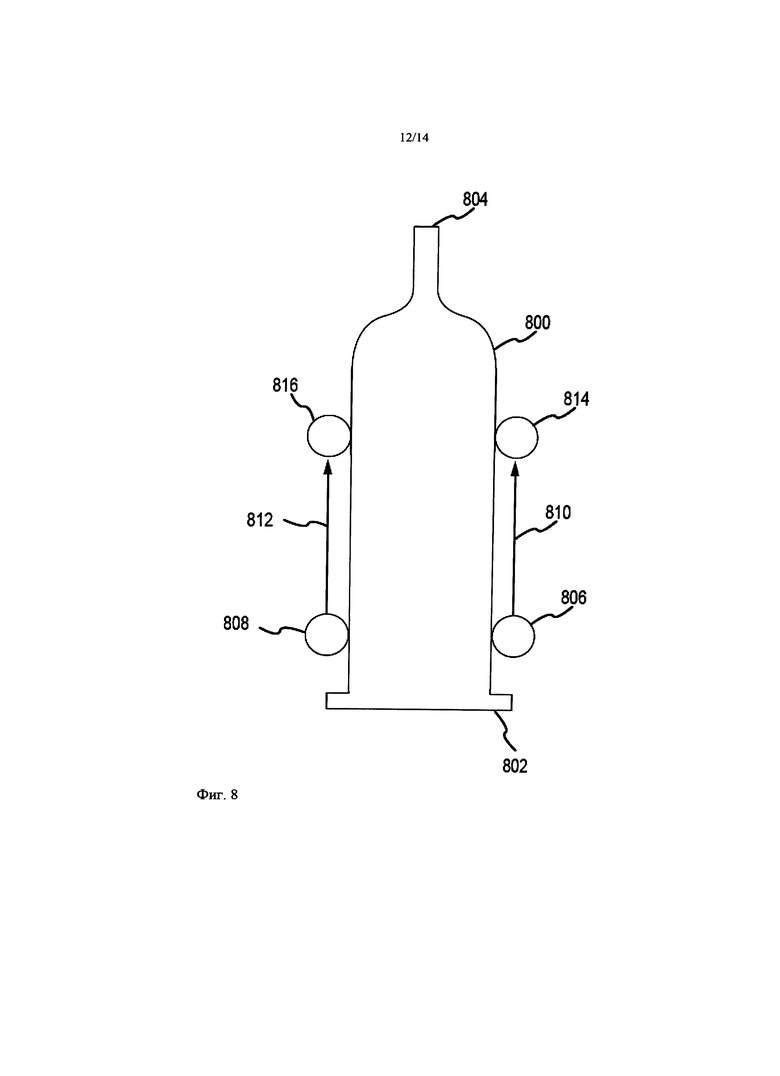
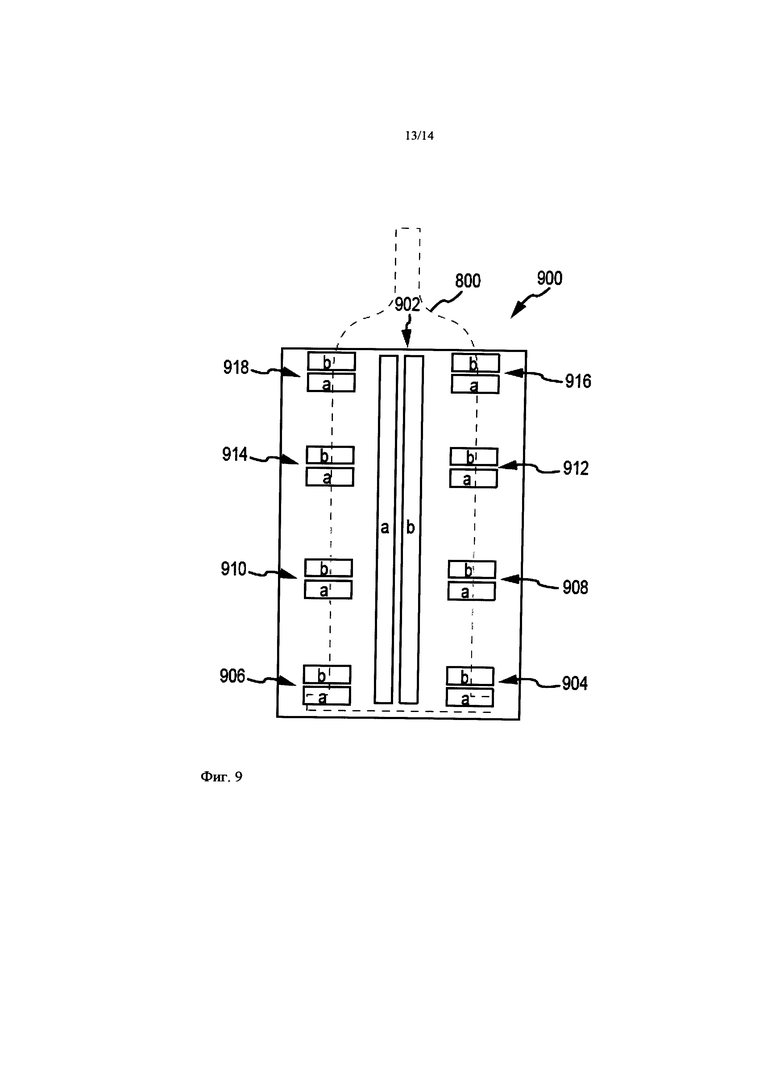
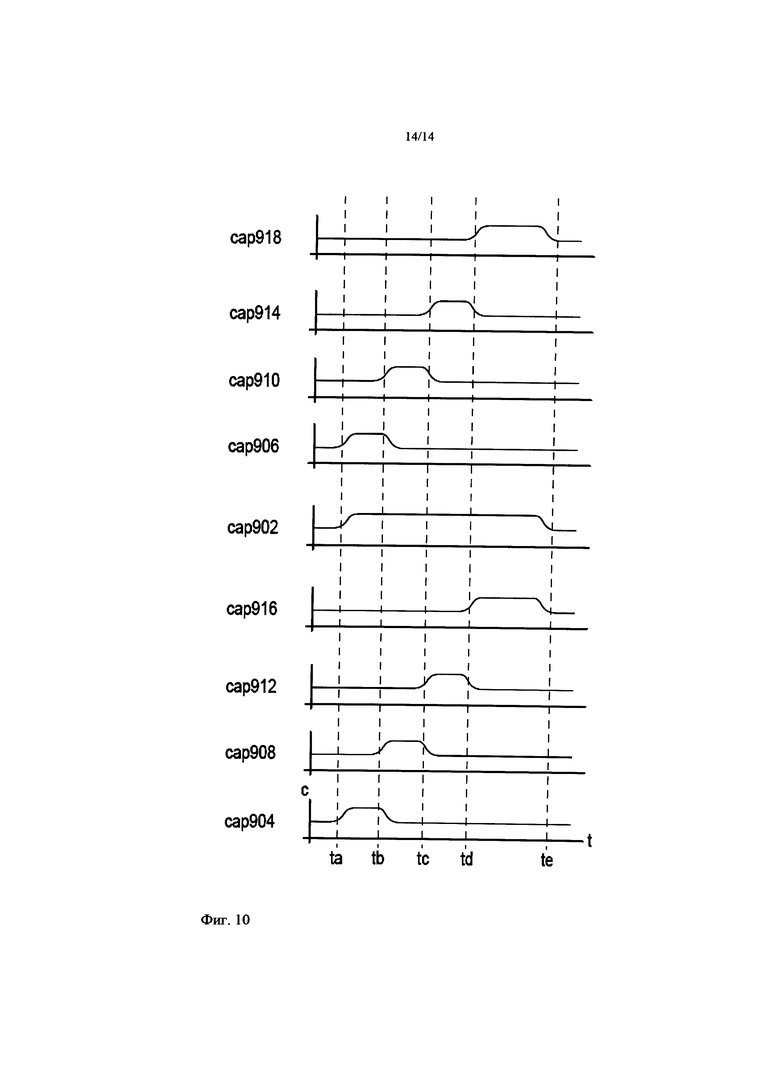
Группа изобретений относится к медицинской технике, а именно к средствам инъекции. Система инъекции содержит устройство инъекции, удерживающее шприц и зону цилиндра шприца, емкостной детектор жидкости, емкостный детектор воздействий со стороны пользователя, электрическое поле которого проникает в зону цилиндра шприца, и логическую схему для определения воздействий со стороны пользователя на основании выходного сигнала емкостного детектора воздействий. Во втором варианте выполнения системы емкостной детектор жидкости имеет первый конденсатор, отдельный второй конденсатор и отдельный третий конденсатор, при этом электрическое поле трех конденсаторов проникает в зону цилиндра шприца в первом положении вдоль продольной оси зоны цилиндра шприца. В третьем варианте выполнения системы устройство инъекции включает силовую головку и корпус шприца, который содержит раму, простирающуюся за пределы силовой головки, емкостной детектор жидкости помещен внутри рамы корпуса шприца так, что рама корпуса шприца размещается между емкостным детектором жидкости и шприцем. В четвертом варианте система содержит логическую схему, при этом воздействие со стороны пользователя связано с работой устройства инъекции. Способы эксплуатации обеспечиваются работой соответствующих систем. Использование изобретений позволяет расширить арсенал технических средств инъекции с емкостным измерением. 8 н. и 36 з.п. ф-лы, 16 ил.
1. Система инъекции, содержащая:
устройство инъекции, способное удерживать шприц и выпускать жидкость из шприца, когда его удерживает указанное устройство инъекции,
зону цилиндра шприца,
при этом указанное устройство инъекции способно удерживать шприц таким образом, чтобы цилиндр шприца имел одинаковую протяженность с зоной цилиндра шприца, которая имеет длину, совпадающую с длиной цилиндра шприца, когда устройство инъекции удерживает шприц, и продольную ось, совпадающую с продольной осью цилиндра шприца, когда устройство инъекции удерживает шприц,
указанное устройство инъекции содержит емкостной детектор жидкости, электрическое поле которого проникает в зону цилиндра шприца по меньшей мере в первом положении и во втором положении вдоль продольной оси зоны цилиндра шприца, при этом первое положение отстоит от второго положения на первое расстояние, равное по меньшей мере половине длины зоны цилиндра шприца,
емкостный детектор воздействий со стороны пользователя, электрическое поле которого проникает в зону цилиндра шприца в первой области, которая проходит вдоль зоны цилиндра шприца, и
логическую схему для определения воздействий со стороны пользователя, способную определять воздействие со стороны пользователя, по меньшей мере частично на основании выходного сигнала емкостного детектора воздействий со стороны пользователя.
2. Система инъекции по п. 1, в которой емкостной детектор жидкости содержит первый конденсатор, имеющий первый протяженный электрод и второй протяженный электрод.
3. Система инъекции, содержащая:
устройство инъекции, способное удерживать шприц и выпускать жидкость из шприца, когда его удерживает устройство инъекции, и
зону цилиндра шприца,
при этом указанное устройство инъекции способно удерживать шприц таким образом, чтобы цилиндр шприца имел одинаковую протяженность с зоной цилиндра шприца, которая имеет длину, совпадающую с длиной цилиндра шприца, когда устройство инъекции удерживает шприц, и продольную ось, совпадающую с продольной осью цилиндра шприца, когда устройство инъекции удерживает шприц,
устройство инъекции содержит емкостной детектор жидкости, который имеет первый конденсатор, отдельный второй конденсатор и отдельный третий конденсатор, при этом электрическое поле первого конденсатора проникает в зону цилиндра шприца в первом положении вдоль продольной оси зоны цилиндра шприца, а электрическое поле второго конденсатора проникает в зону цилиндра шприца в том же первом положении вдоль продольной оси зоны цилиндра шприца и электрическое поле третьего конденсатора проникает в зону цилиндра шприца в том же первом положении вдоль продольной оси зоны цилиндра шприца.
4. Система инъекции, содержащая:
устройство инъекции, содержащее силовую головку и корпус шприца, в котором указанный корпус шприца содержит раму, простирающуюся за пределы указанной силовой головки;
шприц, установленный на устройстве инъекции, в котором указанный корпус шприца обеспечивает взаимодействие между силовой головкой и указанным шприцом, где указанное устройство инъекции способно выпускать жидкость из шприца, содержащего цилиндр, который имеет длину вдоль продольной оси и вдоль которого проходит рама указанного корпуса шприца, и указанный шприц расположен поверх указанной рамы;
емкостной детектор жидкости, расположенный вдоль цилиндра шприца и помещающийся внутри указанной рамы указанного корпуса шприца таким образом, что указанная рама указанного корпуса шприца размещается между емкостным детектором жидкости и шприцем, при этом емкостной детектор жидкости содержит множество конденсаторов, последовательно расположенных по длине цилиндра шприца с промежутками между ними, каждый из которых размещается в отличающемся положении вдоль продольной оси цилиндра шприца, и
зону цилиндра шприца одинаковой протяженности с цилиндром шприца, при этом зона цилиндра шприца имеет длину, совпадающую с длиной цилиндра шприца, и продольную ось зоны, совпадающую с продольной осью цилиндра шприца.
5. Система инъекции по любому из пп. 1 и 3, в которой емкостной детектор жидкости содержит множество конденсаторов, последовательно расположенных по длине зоны цилиндра шприца.
6. Система инъекции по п. 4, в которой множество конденсаторов, последовательно расположенных вдоль длины цилиндра шприца, содержит по меньшей мере восемь отдельных конденсаторов.
7. Система инъекции по п. 4 или 6, в которой каждый из множества конденсаторов имеет пару электродов, при этом каждый электрод из пары электродов размещается таким образом, чтобы вектор, перпендикулярный электроду и пересекающий его, не пересекает какой-либо другой электрод.
8. Система инъекции по п. 7, в которой каждая пара электродов содержит два лежащих преимущественно в одной плоскости электрода.
9. Система инъекции по п. 4 или 6, в которой каждый из множества конденсаторов соединен с интегральной схемой, рассчитанной на обеспечение двухрежимного выходного сигнала для каждого из множества конденсаторов, при этом первый режим двухрежимного выходного сигнала является реакцией на присутствие жидкости, а второй режим двухрежимного выходного сигнала является реакцией на отсутствие жидкости.
10. Система инъекции по п. 4 или 6, в которой каждый из множества конденсаторов рассчитан на обеспечение аналогового выходного сигнала, который изменяется в зависимости от количества жидкости в пределах электрического поля конденсатора.
11. Система инъекции по п. 4 или 6, дополнительно содержащая логическую схему для определения уровня жидкости, способную определять уровень жидкости в зоне цилиндра шприца по меньшей мере частично на основании выходных сигналов множества конденсаторов.
12. Система инъекции по п. 2, в которой вектор, перпендикулярный первому протяженному электроду и пересекающий его, не пересекает второй протяженный электрод.
13. Система инъекции по любому из пп. 2 и 12, в которой первый протяженный электрод лежит преимущественно в одной плоскости со вторым протяженным электродом.
14. Система инъекции по любому из пп. 2 и 12, в которой первый и второй протяженные электроды расположены в направлении, параллельном продольной оси зоны цилиндра шприца.
15. Система инъекции по любому из пп. 2 и 12, в которой первый конденсатор рассчитан на обеспечение аналогового выходного сигнала в ответ на присутствие жидкости в зоне цилиндра шприца.
16. Система инъекции по любому из пп. 2 и 12, дополнительно содержащая логическую схему для определения уровня жидкости, способную определять уровень жидкости в зоне цилиндра шприца по меньшей мере частично на основании выходного сигнала первого конденсатора.
17. Система инъекции по любому из пп. 3, 4, 6, 12, дополнительно содержащая логическую схему для определения воздействий со стороны пользователя, способную определять воздействие со стороны пользователя по меньшей мере частично на основании выходного сигнала емкостного детектора жидкости.
18. Система инъекции по любому из пп. 3, 4, 6, 12, дополнительно содержащая емкостный детектор воздействий со стороны пользователя, электрическое поле которого проникает в первую область зоны цилиндра шприца, которая проходит вдоль зоны цилиндра шприца.
19. Система инъекции по п. 18, в которой электрическое поле емкостного детектора воздействий со стороны пользователя проникает во вторую область зоны цилиндра шприца, которая проходит вдоль зоны цилиндра шприца и находится на стороне, противоположной стороне первой области зоны цилиндра шприца.
20. Система инъекции по п. 18, дополнительно содержащая логическую схему для определения воздействий со стороны пользователя, способную определять воздействие со стороны пользователя по меньшей мере частично на основании выходного сигнала емкостного детектора воздействий со стороны пользователя.
21. Система инъекции по любому из пп. 1-4, 6, 12, 19-20, способная обнаруживать присутствие пальца пользователя вблизи зоны цилиндра шприца.
22. Система инъекции по любому из пп. 1-4, 6, 12, 19-20, способная обнаруживать перемещение пальца пользователя вблизи зоны цилиндра шприца.
23. Система инъекции по п. 4, в которой указанный емкостной детектор жидкости содержит печатную плату (РСВ), на которой расположено множество конденсаторов, при этом указанные РСВ и множество конденсаторов изолированы во внутреннем пространстве корпуса шприца.
24. Способ эксплуатации системы инъекции, включающий:
установку шприца на устройство инъекции,
введение плунжера шприца в контакт с толкателем устройством инъекции,
перемещение толкателя устройства инъекции после стадии установки и во время соприкосновения толкателя с плунжером, при этом результатом стадии перемещения является перемещение плунжера,
определение во множестве моментов времени с помощью емкостных датчиков присутствия жидкости в цилиндре шприца во время стадии перемещения, и
оценку объема жидкости в шприце в каждый из множества моментов времени емкостными датчиками присутствия жидкости, при этом стадия оценки по меньшей мере частично основана на стадии измерения емкостными датчиками.
25. Способ по п. 24, в котором стадия перемещения включает возвратное перемещение плунжера.
26. Способ по любому из пп. 24-25, дополнительно включающий:
втягивание жидкости в шприц на стадии перемещения,
проверку в каждый из множества моментов времени соответствия расчетного объема жидкости объему шприца между наконечником шприца и плунжером,
продвижение плунжера с целью инъекции жидкости пациенту.
27. Способ по любому из пп. 24-25, в котором толкатель находится в однозначно определяемом местоположении в каждый из множества моментов времени.
28. Способ по любому из пп. 24-25, в котором на стадии перемещения непрерывно осуществляются стадии измерения емкостными датчиками и оценки.
29. Способ эксплуатации системы инъекции, включающий:
установку шприца на устройство инъекции,
определение после стадии установки присутствия жидкости в цилиндре шприца с помощью первого емкостного датчика, второго емкостного датчика и третьего емкостного датчика, и
обнаружение ошибочных показаний по меньшей мере частично на основании сравнения выходных сигналов первого, второго и третьего емкостных датчиков, полученных на стадии измерения.
30. Способ по п. 29, дополнительно включающий оценку общего объема жидкости в шприце на основании стадий измерения и обнаружения.
31. Способ эксплуатации системы инъекции, включающий:
установку на устройство инъекции шприца, содержащего жидкость для осуществления стадии установки,
определение присутствия жидкости в установленном шприце с помощью первой части множества емкостных датчиков,
оценку общего объема жидкости в установленном шприце с использованием стадии определения присутствия,
передачу отдельного входного объема системе инъекции, и
проверку соответствия расчетного общего объема, определенного на стадии оценки, входному общему объему, переданному на стадии передачи, при этом стадия проверки осуществляется до инъекции пациенту какой-либо жидкости из установленного шприца с использованием устройства инъекции.
32. Способ по п. 31, дополнительно включающий определение отсутствия жидкости в установленном шприце с помощью второй части множества емкостных датчиков.
33. Способ по любому из пп. 31 и 32, в котором стадия оценки включает вычисление процентного заполнения шприца на основании числа емкостных датчиков из первой части.
34. Способ по любому из пп. 31 и 32, в котором стадия оценки включает проверку расчетного общего объема жидкости по справочной таблице, в которой расчетный общий объем жидкости соответствует числу множества емкостных датчиков из первой части.
35. Способ по любому из пп. 31 и 32, в котором стадия оценки включает деление числа множества емкостных датчиков из первой части на общее число множества емкостных датчиков.
36. Способ по любому из пп. 31 и 32, в котором стадия передачи включает по меньшей мере одно из следующего:
ручной ввод значения, соответствующего входному общему объему,
сканирование машиночитаемой маркировки шприца и
считывание радиометки шприца.
37. Способ по любому из пп. 24, 25, 29-32, дополнительно включающий:
определение емкостными датчиками присутствия по меньшей мере одного пальца пользователя вблизи цилиндра шприца, и
интерпретацию системой инъекции измерения емкостными датчиками как воздействия на систему инъекции со стороны пользователя.
38. Способ по п. 37, в котором измерение емкостными датчиками включает определение емкостными датчиками присутствия двух пальцев пользователя, перемещающихся по противоположным сторонам цилиндра шприца, при этом интерпретация включает интерпретацию измерения емкостными датчиками как входной команды очистки цилиндра шприца.
39. Способ эксплуатации системы инъекции, включающий:
установку шприца на устройство инъекции,
определение емкостными датчиками перемещения пальца пользователя вдоль шприца и
интерпретацию системой инъекции измерения емкостными датчиками как воздействия на систему инъекции со стороны пользователя.
40. Система инъекции, содержащая:
устройство инъекции, способное удерживать шприц и выпускать жидкость из шприца, когда его удерживает устройство инъекции;
зону цилиндра шприца,
при этом устройство инъекции способно удерживать шприц таким образом, чтобы цилиндр шприца имел одинаковую протяженность с зоной цилиндра шприца, которая имеет длину, совпадающую с длиной цилиндра шприца, когда устройство инъекции удерживает шприц, и продольную ось, совпадающую с продольной осью цилиндра шприца, когда устройство инъекции удерживает шприц, и устройство инъекции содержит емкостный детектор, электрическое поле которого проникает в первую область зоны цилиндра шприца, которая проходит вдоль зоны цилиндра шприца, и
логическую схему для определения воздействий со стороны пользователя, способную определять воздействие со стороны пользователя по меньшей мере частично на основании выходного сигнала емкостного детектора, при этом воздействие со стороны пользователя связано с работой устройства инъекции.
41. Система инъекции по п. 40, в которой электрическое поле емкостного детектора проникает во вторую область зоны цилиндра шприца, которая проходит вдоль зоны цилиндра шприца и находится на стороне, противоположной стороне первой области зоны цилиндра шприца.
42. Система инъекции по п. 41, в которой логическая схема для определения воздействий со стороны пользователя способна различать воздействие со стороны пользователя в первой области и воздействие со стороны пользователя во второй области.
43. Система инъекции по любому из пп. 41-42, в которой первая и вторая области простираются преимущественно по всей длине зоны цилиндра шприца.
44. Система инъекции по п. 43, в которой логическая схема для определения воздействий со стороны пользователя способна обнаруживать пальцы пользователя, перемещающиеся в первой и второй областях по длине зоны цилиндра шприца.
| US 2009069756 A1 21.03.2009 | |||
| US 6110148 A 29.08.2000 | |||
| WO 2006021295 A1 02.03.2006 | |||
| US 20120197184 A1 02.08.2012 | |||
| US 2008177900 А1 24.07.2008 | |||
| WO 2004030717 A2 15.04.2004 | |||
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ И СПОСОБ ЕГО РАБОТЫ | 1998 |
|
RU2192894C2 |

