Область техники, к которой относится изобретение
Настоящее изобретение касается устройства подачи, включающего в себя а) кожух, b) емкость для текучей среды, размещенную в кожухе, причем емкость имеет отверстие, с) трубку подачи, находящуюся в жидкостной связи с отверстием, причем трубка имеет передний конец относительно потока, отдаленный от емкости, и задний конец относительно потока, ближайший к емкости, где передний конец и задний конец определяют ось между ними и прямое направление и обратное направление, и d) насос, расположенный так, чтобы подавать текучую среду по меньшей мере в направлении от емкости по трубке. Изобретение также касается способа работы такого устройства.
Предпосылки создания изобретения
Хотя известны устройства подачи, предназначенные для использования в большом многообразии применений, настоящее изобретение в основном имеет отношение к устройствам впрыскивания в применениях, где получающий инъекцию объект является твердым или полутвердым и в которых ориентация устройства впрыскивания относительно получающего инъекцию объекта является критической для надлежащего результата инъекции. Типичными применениями являются назначение фармацевтических препаратов людям или животным, где ориентация важна по разнообразным причинам. В зависимости от рода препарата и цели лечения "ткань - мишень" важна для правильной биохимической активности, пригодности и периода поглощения. Назначенным для инъекции местом может быть, например, подкожное, внутримышечное или внутривенное. Подаваемая доза часто бывает критической, и ошибочное лечение может произойти либо от утраченного препарата, например, из-за неумышленного освобождения иглы, либо из-за частичного ее расположения в ошибочной ткани. И наоборот, особенно большие объемы преднамеренно могут быть распространены на некоторой глубине во время проникновения иглы или частично в медленно освобождающей ткани и частично в быстро освобождающей ткани.
Эти требования также можно встретить при использовании самых простых устройств впрыскивания типа обыкновенного шприца для подкожных инъекций, когда он находится в руках квалифицированного оператора, который также может начать необходимые с медицинской точки зрения исправляющие мероприятия в случае поломок и неисправности. Давно уже существуют более или менее автоматизированные устройства, позволяющие непрофессионалу с ограниченным обучением делать инъекции с приемлемой безопасностью в критических или чрезвычайных ситуациях. Часто устройства разрабатывают только для единичных инъекций. Общее направление в долговременной медикаментозной терапии состоит в том, чтобы возложить ответственность за введение на самого пациента, также в случае детей или нетрудоспособных людей. В этом случае требования все еще повышенные. Непрерывная медикаментозная терапия требует, чтобы пациент справлялся с многократным дозированном, возможно, с изменяющимся установлением дозы и надлежащей заменой опорожненных патронов новыми, как в шприцах типа авторучки. Для избежания ошибок желательна высокая степень автоматизации и контроля не только на этапах простых инъекций, но также и на этапах критического установления и подготовки. Пациенты, зависящие от ежедневных введений, также имеют законную потребность в удобстве и устройствах, достаточно разрозненных, чтобы можно было их использовать в повседневной жизни.
В обычных автовпрыскивателях обеспечена механическая автоматизация. Обычно ожидается, что пользователь должен помещать устройство в нужной для инъекции ориентации напротив кожи и приводить в действие пусковую кнопку. Запасенная механическая энергия, например, в пружинной системе может после этого выполнить автопроникновение в ткань, автоинъекцию лекарственного препарата и, возможно, также автоматическое втягивание иглы. Более простые системы могут не обеспечивать автопроникновение, а предполагают выполнение пользователем введения иглы. Следовательно, устройства обеспечивают оператору небольшую помощь в ориентировании и расположении устройств относительно тела. Кроме того, известно, что автовпрыскиватели требуют, чтобы для приведения в действие инжектора оператор нажимал на устройство напротив места инъекции. Типичные примеры раскрыты в патентах AU 563551, US 4717384, ЕР 518416 и WO 93/23110. Помощь, обеспечиваемая такими конструкциями, ограничена и негибкая, и ее нельзя приспосабливать к различным поддающимся предвидению оперативным или опасным ситуациям. На основании скорее давления, а не положения приведение в действие делает желательные приспосабливания все еще более трудными. Обычно, как только произойдет преднамеренное или непреднамеренное приведение в действие, неотвратимо происходит ряд операций. Кроме того, в механических устройствах обычно бывает высоким риск смещения из-за эффекта отдачи и вносимых принудительных перемещений.
Также были предложены автоматизированные устройства, основанные на электронных или электромеханических принципах. Не рассматривая здесь инфузионные насосы и аналогичные устройства для инъекций, предназначенные прежде всего для использования в больницах или долговременного использования, где ориентация устройства обычно не бывает критической, несколько предшествующих описаний патентов, представляемых, например, в работах ЕР 143895, ЕР 293958, DE 2710433, WO 93/02720, WO 95/24233 и WO 97/14459, а также наших одновременно рассматриваемых заявках SE 9602610-9 (US 60/021397) и SE 9602611-7 (US 60/021293), касается удерживаемых в руках устройств для непосредственного воздействия на тело. В известных устройствах используется преимущество принципов автоматизации в отдельных отношениях, таких как точные и воспроизводимые инъекции, возможно, электродвигателями, автопроникновение с помощью двигателя и смешивание или воспроизведение, идентификация патрона, простой анализ, сбор и манипулирование данными по инъекциям, установка дозы, ориентация инжектора относительно силы тяжести для надлежащего смешивания или удаления воздуха и т. д. Несмотря на это разнообразие, автоматизированные устройства в этом классе не имеют дело с ориентацией устройства в зависимости от получающего инъекцию тела и не решают никакие относящиеся к ней проблемы.
В соответствии с этим все еще сохраняется потребность в устройствах для инъекций, помогающих пользователю в ориентации устройства, связанной с этапами манипулирования, и предотвращающих или улучшающих последствия появляющихся вследствие этого ошибок и неправильного применения, особенно полезных для пациентов, пользующихся самолечением. Хотя настоящее изобретение имеет более общую пользу, оно будет в основном описано относительно этой предпосылки его создания.
Краткое изложение сущности изобретения
Главная цель настоящего изобретения - избежать описанных недостатков и несовершенства известных устройств для инъекций. Более конкретной целью является создание впрыскивателя, помогающего пользователю в части надлежащей ориентации устройства относительно места инъекции. Другая цель состоит в том, чтобы получить устройство, являющееся гибким и приспосабливаемым для различных ситуаций манипулирования и операций. Еще одной целью является предотвращение или улучшение последствия неумышленных действий или неправильного употребления. Другой целью является облегчение введения препарата в правильную ткань - мишень. Еще одной целью является избежание необратимых процессов инъекции. Дополнительной целью является избежание зависимости от полностью механических средств ориентации. Еще одной целью является создание средства, помогающего в ориентации, полностью совместимое с электронным или электромеханическим средством автоматизации. Еще одной целью является получение таких устройств, которые просты в обращении и подходят для самолечения пациентов или, в противном случае, требуют ограниченной квалификации и обучения.
Эти цели достигаются в заявленных устройстве и способе, имеющих отличительные признаки, изложенные в прилагаемой формуле изобретения.
Некоторые из вышеупомянутых целей достигнуты благодаря обеспечению устройства для инъекций бесконтактным датчиком и преобразователем для получения электромагнитного сигнала с датчика. Сигнал сразу же становится пригодным и совместимым с любыми другими электронными или электромеханическими средствами автоматизации, имеющимися на шприце, и удается избежать расчета исключительно на механические средства ориентации. Сигнал можно получать без необходимости в надавливании или больших усилий. Использование преобразованного выходного сигнала датчика является очень гибким и может приспосабливаться ко множеству оперативных ситуаций. Если в устройстве используется последовательность приведения в действие, можно избежать неумышленного инициирования путем требования наличия заранее определенной характеристики, такой как непрерывный или повторяемый сигнал, или создания сигнала, действующего только в пределах узкого окна последовательности. Аналогично этому можно избежать необратимых процессов действия посредством использования выходного сигнала датчика также для блокирования устройства, например, с целью прекращения инъекции, если устройство переместилось в ненадлежащее положение. По аналогичным причинам устройство можно делать селективным относительно ткани - мишени, позволяя делать инъекцию только на заранее определенных глубинах проникновения. Ошибки при манипуляции можно предотвращать, если используется сигнал предупреждения или уведомления пользователя прежде, чем будут пропущены заданные допуски смещения. Общее манипулирование облегчает доступное обслуживание, делая устройство великолепно подходящим для применений, где простота является жизненно важной, как во многих случаях самолечения пациентов. Используемые принципы совместимы с большинством этапов ручного или автоматического инициирования, проведения и завершения инъекции, и их можно, например, приспособить к автоматическому проникновению, впрыскиванию и втягиванию иглы, когда они имеются. Само устройство не должно быть более сложным, чем требуется по другим соображениям, особенно при использовании существующих деталей типа колпачка для иглы также с целью считывания.
Дополнительные цели и преимущества изобретения будут очевидны из приведенного ниже подробного описания.
Подробное описание изобретения
Как указано во введении, описываемый здесь впрыскиватель можно использовать для ряда целей в пределах и вне медицинской области и для любого типа препаратов, таких как химикаты, составы или смеси, в любой емкости и поставляемые для любой цели. По кратко изложенным выше причинам система имеет некоторые особые значения в связи с медицинскими устройствами подачи, где, кроме того, конструктивные ограничения являются более серьезными, чем при большинстве других применений. Для удобства изобретение будет описано, исходя из этого применения.
Принципы настоящего изобретения можно использовать для устройств или систем подачи в широких пределах. Трубкой подачи из устройства может быть канал вливания или любое проводящее средство типа трубочки или катетера, иглы или канюли или не имеющей иглы системы, основанной на пульверизаторе для жидкости или распылителе частиц с газообразной движущей силой. Содержащийся в емкости материал должен подаваться при помощи механизма подачи, также называемого здесь насосом, и можно использовать любой материал, отвечающий этому требованию. Обычно материал представляет собой текучую среду и предпочтительно жидкость, включая материалы, ведущие себя как жидкости, типа эмульсий или суспензий. Эти наблюдения касаются заключительного препарата, в то время как до заключительного приготовления могут присутствовать другие компоненты, а именно твердые вещества. Также должно быть понятно, что тип содержимого емкости должен включать в себя лекарственный препарат в широком смысле и охватывать, например, природные компоненты и общую воду организма, предварительно заполняющие или выводимые в емкость, хотя наиболее часто лекарственный препарат имеет фабричное изготовление. Изобретение может помогать в решении специальных проблем в связи с чувствительными соединениями, склонными к разложению или денатурации под действием механического напряжения, типа больших сдвиговых усилий. Таким типом могут быть составы с большим молекулярным весом, гормоны с большим молекулярным весом, например соматотропные гормоны или простагландины. Изобретение может также помогать в решении специальных проблем в связи с лекарственными препаратами, требующими этапа приготовления непосредственно перед вливанием, обычно смешивания двух или больше компонентов, которые все могут быть текучими средами или могут включать в себя твердое вещество, как при растворении лиофилизированного порошка в растворителе типа гормонов или простагландинов.
Способ введения также можно изменять в широких пределах, и он может включать в себя полностью непрерывное вливание, непрерывное вливание с изменяющимся потоком или прерывистые вливания, или инъекции с повторяемыми либо равными, либо варьирующимися дозами. Особенно при объединении со средствами автоматизации способ введения предпочтительным образом можно легко изменять с помощью приспособлений в программном обеспечении или аналогичного управления. В портативных устройствах обычно используется прерывистое введение. Аналогично этому, хотя устройства подачи можно также рассматривать для единственного действия дозирования, обычно их конструируют больше, чем для одной или множества отдельных доз для прерывистого введения.
В дополнение к основным функциям для целей подачи система подачи предпочтительно может включать в себя другие ценные особенности типа возможности инициирования емкости и ее содержимого и обеспечения различных проверок и управления как емкостью, так и электронной и механической частями насоса.
Изобретение можно применять к устройствам подачи в стационарных или долговременных установках. По причинам, которые будут объяснены ниже, изобретение дает особые преимущества в устройствах подачи, предназначенных для амбулаторных целей, особенно в устройствах, которые являются автономными с встроенными средствами накопления энергии, двигателя и процессора, и, в частности, в небольших переносных устройствах подлинно портативного типа.
Как упомянуто во введении, предпочтительное устройство подачи обычно может, например, содержать по меньшей мере а) кожух, b) емкость, с) трубку подачи, находящуюся в жидкостной связи с емкостью, и d) насос, предназначенный для подачи текучей среды по меньшей мере из емкости по трубке.
Кожух
Кожух устройства следует понимать в общем смысле, и в основном он представляет собой точку опоры, если не указано иначе, для перемещений, а также точку опоры для сил, прикладываемых средством приведения в действие, осуществляющим упомянутые перемещения там, где прикладывается сила между кожухом и перемещающей или закрепленной деталью. Движущиеся детали могут присутствовать в устройствах насоса или, например, в деталях, выполняющих смешивание, автопроникновение, выброс и втягивание иглы и т.д. Минимальное функциональное требование заключается в том, что кожух обеспечивает опору или платформу для движущихся деталей и средство приведения в действие, обеспечивающее перемещения и усилия. Однако, как обычно бывает на практике, кожух предпочтительно образует емкость, по меньшей мере частично заключающую детали, а также предпочтительно до такой степени, что с внешней стороны находятся только детали, предназначенные для управления или контролирования оператором.
Емкость
Деталь емкости следует понимать в широком смысле, и она может иметь разнообразные формы типа трубочки, сосуда, мешка с эластичными стенками, пузырька, ампулы, патрона, корпуса шприца и т.д. любого вида. Имеются некоторые преимущества в использовании емкостей, которые являются жесткими по меньшей мере у их отверстия или детали для крепления к механизму, но предпочтительно полностью жесткими типа пузырьков, ампул или корпусов шприцев. В качестве материалов емкостей предпочтительно можно использовать обыкновенные материалы, такие как стекло или пластмасса. Емкость можно изготавливать за одно целое или в виде составной конструкции, например, включающей в себя внешний кожух, или любой другой конструкции, состоящей из множества деталей для закрывания, крепления, защиты и т.д., и всякий раз, когда здесь используется термин "емкость", его следует понимать включающим в себя любую вспомогательную деталь. Емкость может быть изготовлена за одно целое с кожухом, например, для использования в одноразовых впрыскивателях, когда емкость является перезаряжаемой или когда емкость является частью нагнетаемой системы, неоднократно втягивающей препарат, подлежащий впрыскиванию из внешнего источника или канала перед каждым действием инъекции. Емкость также может быть отдельной, например, для обеспечения возможности ее замены в случае одноразовых предварительно наполненных емкостей, для простой стерилизации или выбрасывания в случае замены типа емкости или пациента. Как известно само по себе, может присутствовать больше одной емкости, например, в случае, если желательно осуществлять смешивание перед инъекцией, смешивание во время инъекции при получении частичного объема из каждой емкости или в случае последовательного введения различных компонентов.
Емкость имеет по меньшей мере одно отверстие, через которое лекарственное средство проходит во время основной операции подачи устройства либо из внутренней части емкости наружу, например, для введения лекарственных препаратов пациенту, либо в емкость в случае аспирации жидкостей организма или на этапах приготовления, таких как заполнение, смешивание или растворение в емкости, во время которых необходимо наличие отверстия. Возможно и даже во многих ситуациях предпочтительно, чтобы некоторые операции устройства типа инициирования происходили до установления связи, и затем потребность в отверстии должна рассматриваться удовлетворяемой средством приготовления для создания связи типа наличия удаляемой крышки или прокалываемой или разрываемой детали на самой емкости, как в случае ампулы или мешка, или специально сконструированной детали, как в случае проницаемых мембран или перегородки. Вся связь может происходить через одно отверстие, например, и прохождение лекарственного препарата, и уравнивание давления в жесткой емкости, или путем подачи из емкости, которая является гибкой или имеет подвижную или деформируемую часть, но ничто не препятствует тому, чтобы для подобных целей были предусмотрены дополнительные отверстия, которые могут быть идентичны по меньшей мере одному отверстию, но которые могут полностью отличаться и, например, быть приспособленными для другой цели, например для вливания или введения с помощью шприца с подвижной стенкой или поршнем.
Емкость может представлять простую бутылку, пузырек или мешок в случае, если устройство подачи устроено так, чтобы непрерывно или периодически извлекать оттуда дозированные количества для подачи согласно указаниям. Часто и особенно в связи с самолечением тип емкости является более сложным, и обычно он имеет форму патрона, являющегося частью емкости типа шприца системы подачи, которая может быть еще более сложной в случае многокамерных патронов. Можно в общем считать, что патрон для представленных целей может включать в себя сосуд, имеющий переднюю часть и заднюю часть, определяющие общую ось патрона, выпускное отверстие для препарата, расположенное в передней части, и по меньшей мере одну подвижную стенку, расположенную в задней части, причем смещение этой стенки вызывает перемещение препарата к выпускному отверстию или выталкивает препарат через него. Форма сосуда и подвижная стенка должны быть взаимно пригнаны. Сосуд может иметь по существу постоянное внутреннее поперечное сечение с аналогичной постоянной осью сосуда между передней и задней частями, обеспечивающими в общем сосуд в форме трубочки, и наиболее предпочтительно поперечное сечение имеет общий круглый вид, что обеспечивает по существу цилиндрический сосуд. В этом случае подвижная стенка предпочтительно имеет по существу постоянную форму, хотя может иметь упругое тело, уплотняющим образом подогнанное к внутренней поверхности сосуда, и предпочтительно поршневого типа.
Известны патроны двух- или многокамерного типа, например, для препаратов, требующих перед введением смешивания двух или больше компонентов или исходных веществ. Компоненты хранятся, отделяемые одной или более промежуточными стенками различных известных конструкций, эти стенки делят сосуд на отдельные камеры, иногда размещенные параллельно вдоль оси патрона, но наиболее часто в пакетированной связи вдоль оси. Может иметь место унификация компонентов благодаря разрушению, проникновению или открыванию конструкции клапана в промежуточных стенках, например, путем введения штифта или иглы через переднюю часть патрона, сквозь заднюю подвижную стенку или около нее или с помощью средства с внешней стороны патрона (сравните, например, с упоминаемой работой WO 93/02720). В другой известной конструкции промежуточная стенка или стенки имеют плунжерный тип, и связь по потоку между камерами выполняется посредством перемещения плунжера к обходной секции, где внутренняя стенка имеет одну или несколько увеличенных секций или повторных периферийных канавок и фасок, расположенных так, чтобы обеспечить возможность протекания содержимого задней камеры в переднюю камеру при смещении задней подвижной стенки (сравните, например, с работами US 4968299 или WO 93/20868 и WO 95/11051). Камеры могут содержать газ, жидкость или твердое вещество. Обычно присутствует по меньшей мере одна жидкость. Наиболее часто в фармацевтических применениях присутствуют только две камеры и обычно содержат одну жидкость и одно твердое вещество, причем последнее растворяется и воспроизводится во время операции смешивания.
Трубка
В общих чертах трубка подачи соединена в жидкостной связи с отверстием емкости и имеет передний конец относительно потока, отдаленный от емкости, и задний конец относительно потока, ближайший к емкости. В самой основной форме трубку можно рассматривать как продолжение отверстия емкости. В этом смысле передний конец может иметь любой вид, включающий соединение с другой трубкой, например любой из упомянутых общих инфузионных каналов. Однако передний конец предпочтительно является завершением канала впрыскивания, приспосабливаемого для подачи препарата к целевому месту, например на пациенте или внутри него, и для этой цели по меньшей мере последняя, самая передняя часть трубки должна подходить для подачи к месту. В зависимости от используемого механизма подачи передний конец может быть сконструирован не для непосредственного контакта с целевым местом, как в случае пульверизаторов для жидкости, распылителей или напылителей порошка, где передний конец может быть отверстием или насадкой для расположения на расстоянии от цели или на поверхности цели, несмотря на то, что истинная цель находится ниже этой поверхности. В других примерах передний конец сконструирован для проникновения в цель, как в случае канюль или обыкновенных игл. Канал между передним и задним концами может быть искривлен или изогнут, как в случае гибкой трубочки для вливания, или во встроенном неразъемном соединении, хотя во многих применениях желательно, чтобы трубка была по существу прямой, как в случае иглы на шприце. В общем по меньшей мере последняя, самая передняя часть трубки определяет в смысле потока выходную ось и прямое и обратное направления. Изложения в отношении расположения и направления будут даваться относительно них, если не указано иначе.
Механизм насоса
Механизм для подачи лекарственных препаратов через отверстие емкости в основном включает в себя по меньшей мере один тип насоса, который следует выбирать для специального вида или емкости и используемого лекарственного препарата. Насос может включать в себя любой вид источника давления типа механического или электролитического устройства повышения давления в емкости и средство подходящего клапана для управления, причем этот способ можно использовать фактически с любым видом емкости и любым видом изделия типа введения порошка сквозь кожу, как приведено в качестве примера в работе WO 94/24263, подобно подаче через пульверизатор для жидкости, как представлено в качестве примера в работе WO 94/2188, или обычным вливанием через трубочку, как представлено в качестве примера в работе WO 88/09187. Любой вид емкости также можно использовать с насосами, основанными на перистальтическом или центробежном действии, хотя также предпочитаются для обычного использования насосы, основанные на управляемом положительном смещении, и особенно такие насосы, которые основаны на раздельном действии цилиндра и поршня, как приведено в качестве примера в работе US 5480381 для пульверизатора жидкости или в работе US 4564360 для устройства, основанного на управляемой вручную игле. Емкость для обыкновенного шприца требует специализированной насосной системы. Либо механизм приспосабливают для воздействия на полные шприцы, имеющие свои собственные поршневые штоки, путем зацепления и смещения в осевом направлении упомянутого штока, как приведено в качестве примера в упомянутом вначале патенте US 4978335, что может быть предпочтительным, когда желательно приспосабливать шприцы многих различных типов и размеров, либо механизм имеет поршневой шток, действующий более или менее непосредственно на поршень емкости патронного типа, как приведено в качестве примера в работах WO 95/26211, ЕР 143895 или ЕР 293958, который можно делать меньшего размера и лучше приспосабливаемым к портативным устройствам. Кроме того, в двойных или многокамерных патронах можно использовать подобные устройства для их различных фаз работы, как приведено в качестве примера в упомянутой вначале работе WO 93/02720. Хотя различные обсуждаемые механизмы насосов могут включать в себя механические средства для воздействия на лекарственный препарат или поршневое средство, например поршневой шток, их можно приводить в действие любыми известными способами, типа газового давления, вакуума, гидравлики, пружин или работы вручную. Приводить в действие механизм насоса предпочитают косвенно или предпочтительно непосредственно электрическими устройствами типа электрического двигателя, между прочим, из-за их легкости приспосабливания к полностью автоматизированному устройству.
Механизм предпочтительно может включать в себя дополнительные компоненты. Например, механизм может включать в себя специальные средства для гарантирования подаваемых доз, например, путем прямого измерения подаваемых лекарственных препаратов, хотя обычно предпочитают непосредственно или косвенно использовать для этого насос, например, путем контроля осевого смещения или вращения оси поршневого штока по существу известным способом. В частности, механизм предпочтительно включает в себя систему управления, функционирующую для выполнения по меньшей мере части вышеупомянутых этапов введения препарата, инициирования емкостей или патронов, самоуправления или наблюдения и возможной регистрации проводимых операционных этапов. Такие системы известны в технике, как приведено в качестве примера в патенте US 4529401, и могут быть сконструированы различными способами. Для целей настоящего изобретения предпочтительно, чтобы система управления приводила и контролировала по меньшей мере часть датчиковой системы и обрабатывала полученные с нее данные.
Бесконтактный датчик
Общие положения
Принципы настоящего изобретения можно использовать в связи с любым впрыскивателем всякий раз, когда желательно установить расстояние или ориентацию между любой из его деталей и объектом. Объектом может быть оператор, например, с целью блокирования устройства, если присутствие оператора не будет положительно подтверждено. Объектом может быть часть линии связи, например, чтобы гарантировать надлежащую передачу в случае обмена данными.
В соответствии с основным назначением, заключающимся в обеспечении надлежащего местоположения, целью впрыскивания является объект, например пациент или животное, для получения подаваемого или впрыскиваемого препарата. Для выполнения этого датчик предпочтительно располагают так, чтобы обеспечить его местоположение относительно переднего конца трубки. В случае, если передний конец трубки относительно кожуха не задается, как при использовании трубки в виде гибкого шланга, может потребоваться фиксированное расположение датчика относительно переднего конца, чтобы помочь пользователю в локализации этого конца. Такое приспособление также может нуждаться в проводах или другой линии связи с кожухом в случае, если сигнал должен использоваться или обрабатываться средствами автоматизации в кожухе. Имеются преимущества в использовании изобретения в связи с устройствами инъекции в заданной пространственной связи между передним концом трубки и кожухом. Трубка все еще может быть подвижной относительно кожуха, например, в случае выдвижения и втягивания иглы, как в обычных автовпрыскивателях, или просто для доступа к игле или ее колпачку или регулирования глубины проникновения, но в этом случае обычно осуществляется направление заранее определенным и предсказуемым способом. В этих случаях расположения переднего конца трубки на кожухе датчик можно располагать у упомянутого переднего конца трубки. Датчик предпочтительно устанавливают неподвижно относительно кожуха. Изобретение успешно используется в связи с основанными на игле впрыскивателями, где местоположение является критическим по причинам, обсуждавшимся во введении. Приводимые здесь расположения датчика не должны исключать того, что сам датчик содержит подвижные детали, как в случае переключателя.
Считывание направления относительно цели впрыскивания зависит от назначения расположения устройства, и направление считывания может быть полностью независимым от направления подачи или впрыскивания, например при впрыскивании в показанных выше независимых ситуациях впрыскивания. Кроме того, когда требуемая ориентация устройства связана с направлением инъекции, направление считывания может отличаться от направления инъекции, например быть нормальным или противоположным относительно него, например, если имеется опорная поверхность, отличающаяся от поверхности цели инъекции, как при работе в полости тела или относительно крепления. В менее сложных ситуациях предпочитают, чтобы направление считывания имело по меньшей мере один компонент, параллельный направлению инъекции или оси трубки у переднего конца согласно определению. Направление считывания под углом к направлению инъекции, особенно под острым углом, можно использовать, например, для гарантирования надлежащего исходного положения при введении иглы сбоку или наклонно к поверхности объекта, как это происходит при введении иглы или канюли на некотором безопасном расстоянии, хотя и на ограниченную глубину, или когда доступ к телу не позволяет приблизиться более перпендикулярно, как это бывает при стоматологических применениях. В большинстве применений предпочитают делать направление считывания по существу параллельным направлению инъекции.
Выбор датчика
Выбор типа датчика может быть продиктован многочисленными обстоятельствами, такими как цель считывания, характер объекта и тип цели, дальнейшая обработка сигнала, пространственные соображения, имеющаяся энергия и т. д. Обычно подходящие принципы и элементы считывания известны и могут использоваться как таковые или с приспособлением конструкции для поставленных целей.
Может оказаться желательным использовать бесконтактные датчики, способные обнаружить присутствие объекта или близость к нему, также при нахождении датчика на расстоянии от объекта, например, чтобы обеспечить возможность свободного расположения относительно других деталей и ограничений устройства для сохранения операционного доступа в ограниченных пространствах, чтобы предотвратить загрязнение датчика, защитить хрупкий датчик от повреждения, приспособить считывание к другому типу бесконтактного инжектора, например типа пульверизатора жидкости или распылителя порошка и т.д. Типы датчиков для этой цели могут быть основаны, например, на восприятии теплового, инфракрасного или радиоизлучения. Можно использовать общие компоненты, такие как термисторы, терморезисторы, приемники инфракрасного излучения и т. д. , но не ограничиваться ими, и эти компоненты сами по себе или подсоединенные к ним электронные схемы можно настраивать на определенную температуру цели, например температуру поверхности тела. При включении передающего устройства, например радио, инфракрасного или ультразвукового излучения, можно устанавливать приемное устройство для получения сигнала на определенном расстоянии, основываясь на амплитуде, частоте, фазе или экранировании, вносимых целью. Предпочтительным способом является емкостное или индуктивное считывание, которое является простым, надежным и приспосабливаемым как к типу цели, так и к расстоянию. Требуемый сигнал может быть получен от изменения емкости или электромагнитного поля под влиянием цели. Все упомянутые способы способны обнаружить наличие объекта благодаря изменению соответствующего параметра, а также обеспечить желательный электромагнитный сигнал, необходимый при использовании существующих и имеющихся в продаже компонентов. Ничто не исключает того, что устройство также содержит детали, способные соприкасаться с объектом, например втулку или любую другую конструкцию распорки, с целью содействия в стабилизировании устройства во время инъекции, и эту конструкцию в этом случае не обязательно устраивать так, чтобы обеспечить сигнал близости. Когда желательно, вышеупомянутые типы датчиков также можно использовать в непосредственном соприкосновении с объектом, либо для устранения необходимости в дополнительных конструкциях, либо для обеспечения дополнительной помощи при контакте.
Контакт между впрыскивателем и объектом необходим, когда препарат подлежит введению в объект через канал типа иглы, канюли или трубочки вливания. Как показано, во многих ситуациях желательно иметь дополнительный контакт между впрыскивателем и объектом, например, чтобы стабилизировать устройство во время инъекции, помочь оператору посредством устанавливания устройства на объекте или даже присоединения устройства к объекту, прижать или оттянуть кожу пациента в месте инъекции, отвлечь пациента от боли проникновения и т. д. Любой из вышеупомянутых бесконтактных датчиков, функционирующих на расстоянии, можно использовать также в соприкосновении с объектом, с выступающей деталью или без нее, как описано. Однако в случае контакта датчик предпочтительно можно делать в форме контактного датчика. Механический контакт можно воспринимать, например, как давление, возникающее между датчиком и объектом, когда детали имеют требуемые заранее определенные относительные положения, и этот способ также можно приспособить для реагирования только при наличии некоторого заранее определенного контактного давления, например, для надлежащей инъекции или в качестве меры предосторожности от сил отдачи. Датчик может содержать истинный датчик давления, пьезоэлектрическое устройство или переключатель, смещаемый, например, механическим средством типа усилия пружины или замка, например упругой защелкой. Восприятие давления не требует больших перемещений в каком-либо компоненте датчика. В качестве альтернативы контакт можно воспринимать как смещение подвижной детали, вызываемое объектом при относительном перемещении между ними. Восприятие смещения можно выполнять просто, и для этого требуются лишь небольшие усилия. В свою очередь, смещение можно регистрировать само по себе, например, в виде тока, наведенного в катушке перемещением, которое дополнительно может обеспечивать сигнал скорости. Смещение также можно регистрировать как определение местоположения подвижной детали, когда она находится в критическом положении, которое можно выполнять с помощью любого детектора давления, как упоминалось выше, но может оказаться достаточным использовать детектор типа переключателя. Можно использовать переключатель любого типа, например, основанный на оптическом детектировании, например, с помощью фотоэлемента, или передающего и приемного устройств инфракрасного излучения, подвижной детали в критическом положении. Можно использовать обычные механические переключатели, имеющие подвижные контактные поверхности, например стандартные микропереключатели или конструкции для определенного применения с контактным средством, открываемым или закрываемым подвижной деталью. По причинам надежности предпочитают использовать элементы переключателя, на которые оказывается косвенное воздействие в положении переключения, например элементы на эффекте Холла, либо выступающие элементы, подвергаемые воздействию магнита, либо элементы реле, подвергаемые воздействию наведенного тока от перемещения, и особенно элементы, являющиеся герметизированными. Смещение может давать сигнал только в желательном положении конца, что является достаточным для многих целей, но также можно обеспечивать сигналы вдоль пути либо непрерывно, либо во множестве дискретных местоположений, например, для контролирования правильного использования устройства или при обеспечении регулируемого восприятия близости. Смещение подвижной детали обычно оказывается больше, чем при считывании давления, например, по меньшей мере на 1 мм, предпочтительно по меньшей мере на 2 мм и наиболее предпочтительно по меньшей мере на 4 мм.
Не зависимо от типа используемого датчика на устройстве подачи можно предусмотреть датчик в качестве дополнительного компонента, сверх компонентов, требуемых для других целей. Однако предпочитают конструкции приспособить для других целей дополнительно к возможности считывания, которую легче всего выполнить контактными датчиками. Часто бывает предпочтительным смонтировать датчик с деталью, связанной с трубкой устройства. В случае бесконтактной подачи, как в пульверизаторах жидкости, распылителях порошка, разбрызгивателях, ингаляторах и т.д., такие устройства часто содержат направляющую или ориентирующую часть для контакта с объектом типа втулки или отверстия типа прохода для более общего использования, или детали, приспосабливаемой к определенному целевому органу, типа мундштука, наглазника и т.д., и может быть желательным связать датчик с такими деталями. Аналогичные детали также могут присутствовать и использоваться при применении устройств подачи, имеющих трубки для контакта с объектом, но здесь датчик преимущественно можно связывать с этим компонентом трубки, например, включающим в себя трубочки, иглы или канюли. Часто поверх трубки с наконечником для введения в объект используют подвижный колпачок, и этот колпачок отжимается назад в связи с введением трубки. Колпачок может служить для защиты трубки от повреждения или загрязнения, для защиты пользователя от неумышленного прокалывания или скрывания, например, иглы от пациента, чтобы уменьшить боязнь. Датчик благоприятно можно связывать с таким колпачком таким образом, чтобы датчик некоторым образом давал сигнал в ответ на перемещение колпачка, и предпочтительно так, чтобы при надлежащем проникновении трубки был получен отличимый сигнал. Этот принцип можно использовать в связи с гибкой трубочкой вливания, если присутствует колпачок, который не всегда бывает, поскольку трубочки вливания часто вводят квалифицированные практикующие врачи, не нуждающиеся во вспомогательных устройствах. Преимущества лучше всего видны, когда кожух закреплен и используется для проникновения трубки, которое обычно имеет место в случае самолечения пациента и которое обычно требует, чтобы трубка была установлена фиксированно относительно кожуха по меньшей мере во всех направлениях, кроме осевого, где может сохраняться подвижность, например, для автопроникновения или удаления защитного приспособления иглы, но во многих случаях трубку также крепят неподвижно и в осевом направлении. Изобретение преимущественно используется с датчиком, связанным с подвижным колпачком иглы для инжектора.
Во всех описанных устройствах датчика его следует располагать так, чтобы получать изменения обнаруживаемых сигналов, когда критическая деталь устройства, образующая точку опоры, имеет требуемое местоположение относительно целевого объекта. В случаях отсутствия контакта между трубкой и объектом это может быть расстояние, подходящее для подачи препарата, либо концентрированной подачи для проникновения, как для пульверизатора жидкости, либо распределенной подачи, как для распылителя. Датчик может быть датчиком давления для детали, размещаемой на объекте в подходящем местоположении, или датчиком смещения, например, на колпачке, открывающем отверстие, либо простым передним переключателем. В случае проникающих трубок датчиком может быть датчик давления, располагаемый таким образом, чтобы он зацеплялся объектом на заранее определенной глубине проникновения, например в основании иглы или канюли, или датчиком смещения колпачка, как описано выше, с изменением сигнала при заранее определенном смещении колпачка, например, с помощью переключателя в требуемой точке.
Как было показано выше, измеряющий направление датчик может находиться под любым требуемым углом, хотя обычно он направлен прямо относительно трубки. В большинстве применений может оказаться достаточным иметь датчик единственного направления, хотя для фиксирования положения в других измерениях можно применять использование большего количества датчиков, например два датчика для определения ориентации в данной плоскости или три датчика для определения ориентации во всех трех измерениях, например, при работе устройства в полости.
Использование сигнала
Сигнал, принимаемый с датчика, должен иметь форму или быть преобразованным в форму электромагнитного сигнала, отображающего данные близости, как было описано выше. Электромагнитный сигнал может быть основан на электромагнитном излучении типа оптического сигнала, но предпочтительно это электрический сигнал. Разработано много подходящих компонентов для использования в качестве датчиков, дающих такой выходной сигнал, но в других случаях их можно вводить в схему, обеспечивающую такой выходной сигнал. Любые характерные, изготовленные за одно целое или отдельные приспособления этого вида можно рассматривать как преобразователь для выходного сигнала датчика в электромагнитный сигнал. Принятый или преобразованный таким образом электромагнитный сигнал, в общих чертах, обрабатывается в процессоре с целью обеспечения управляющего сигнала. Управляющий сигнал, в свою очередь, используется для управления функциональным или операционным компонентом устройства. Операционные компоненты могут иметь любой вид, хотя ниже будут приведены некоторые типичные примеры. Управляющий сигнал может иметь любой характер типа механического, оптического и т.п., в зависимости от его дальнейшего использования, но предпочтительно это электрический сигнал.
Управляющий сигнал можно использовать для выдачи сообщения пользователю, например, с целью предупреждения или предостережения пользователя о неправильном положении прежде, чем устройство будет активизировано для подачи. Сообщение может быть звуком, тактически воспринимаемым сигналом типа вибрации, визуальным сигналом в форме лампочки аварийной сигнализации или более сложным сообщением на устройстве отображения и т.п., или любой комбинацией таких сообщений.
Управляющий сигнал предпочтительно используется для управления основными функциями устройства во время действий, предпринимаемых оператором. Управляющий сигнал может использоваться, чтобы разблокировать или заблокировать устройство соответственно в зависимости от правильного условия близости. Разблокирование/блокирование может осуществляться с помощью электромеханической связи типа устройства реле, блокирующего механическую функцию, например механизм поршневого штока или насоса. Лучше использовать эту функцию в связи с устройствами, имеющими по меньшей мере некоторые средства автоматизации для приведения устройства типа электродвигателя, действие которого может определяться управляющим сигналом. Еще лучше, если устройство дополнительно включает в себя средство процессора для управления средством двигателя, например, чтобы гарантировать надлежащее управление патроном, инициирования, упорядочивания действий, дозирования, обратной связи по данным введения и т. д. , и в этом случае электромагнитный сигнал можно подавать в процессор для дополнительной гибкости, например, разрешая процессору выдавать сигнал управления активизированием двигателя только после выполнения условия близости или только после того, как вышеупомянутые этапы инициирования окажутся должным образом законченными или надлежащее условие окажется положительно подтвержденным в программе автоматического управления. Существующий блок процессора может здесь действовать как устройство обработки между электромеханическим сигналом и управляющим сигналом.
Управляющий сигнал можно далее использовать для фактического запуска устройства, то есть, как только датчик посылает сигналы об условии заранее определенной близости, запускается автоматическая функция. Что касается только что описанного условия разблокирования/блокирования, эту функцию запуска можно использовать для полностью механических средств приведения через электромагнитный механизм освобождения, лучше вместе со средством электродвигателя, наиболее предпочтительно с управляемой процессором автоматикой в устройстве.
На самом деле разблокированные или запускаемые действия могут иметь различный характер. Предпочтительно в устройствах с многократным дозированием, возможно, включающих в себя механическое, но предпочтительно электрическое управление подаваемыми дозами, подвергается воздействию впрыскивание. В устройствах типа автовпрыскивателя может также подвергаться воздействию этап автопроникновения, предпочтительно так, чтобы осуществлялось управление последовательностью автопроникновения и автоинъекции, возможно, с заключительным этапом втягивания иглы. Известны автовпрыскиватели, которые либо подают препарат также во время фазы проникновения, либо разблокируют впрыскивание впервые при завершенном проникновении, и изобретение совместимо с обоими режимами работы. В случае многокамерных патронов с устройствами переливания или обхода, которые известны сами по себе, процедура впрыскивания может включать последовательное впрыскивание различных препаратов типа анестезирующего средства, за которым следует активный ингредиент, или активного компонента, за которым следует компонент промывания.
Если критическое значение близости сделано регулируемым либо электронным путем в процессоре, например путем выбора различных электромагнитных сигналов из дискретных или непрерывных выходных сигналов, либо механически, например, делая датчик подвижным относительно кожуха, то дополнительно увеличивается гибкость использования. Устройство можно приспособить к различным характеристикам трубки, например длине иглы, сочленениям и конструкции, и к различной глубине впрыскивания, например, типу ткани, такому как подкожная, внутривенная, жировая или мышечная. Устройство можно также приспосабливать к условиям локального места цели объекта, такого как необходимая глубина локального проникновения для типа ткани - мишени, которую может делать вручную квалифицированный оператор, или автоматически, если устройство в известном способе оборудовано средством для распознавания различных типов цели, например, основанном на усилии проникновения или обратной связи давления впрыскивания.
Если предпочитают, чтобы датчик подавал различные распознаваемые электромагнитные сигналы для различных значений близости, снова либо непрерывный сигнал от бесконтактного датчика, либо от контактного датчика с перемещаемым элементом дает непрерывный или многократный дискретный электромагнитный сигнал вдоль его пути перемещения. Теперь более передовым схемам введения можно помогать, например, с помощью датчика подачи предварительно запрограммированных количеств или компонентов в случае многокамерных устройств на различных глубинах или непрерывного распространения большего объема по всему диапазону глубин проникновения.
Электромагнитный сигнал датчика предпочтительно можно анализировать с помощью процессора не только относительно абсолютной величины расстояния, но также и относительно изменения упомянутой величины расстояния по времени для обеспечения дополнительной ценной информации. При объединении с заданным усилием проникновения или усилием противодавления инъекции данные могут отображать характер объекта, например тип ткани, или неправильное использование, например удар или толчок, а не надлежащее проникновение или способ для направления пользователя для такой заранее определенной подходящей скорости введения.
Все вышеупомянутые применения сигнала датчика облегчаются наличием по меньшей мере некоторого электромеханического средства в устройстве, дополнительно описываемого ниже.
Обработка сигнала
Обычно для более полной выгоды устройство должно быть объединено с подходящей электроникой с целью приведения активных элементов датчика и для извлечения оттуда электромагнитного сигнала. Электроника процессора должна быть по меньшей мере способна обнаруживать выходной сигнал датчика для извлечения либо непрерывных, либо дискретных данных и подавать их для использования посредством управляющего сигнала, например, любым из приведенных в качестве примера способов, и для этих целей процессор может по меньшей мере приспособить и (или) передавать электромагнитный сигнал в операционный компонент. Ниже будет представлена в качестве примера предпочтительная обработка сигнала.
Электромагнитный сигнал с датчика может быть простым единственным сигналом включения/выключения, принимаемым с компонента датчика переключательного типа, и может быть достаточным для многих целей, например для простой команды запуска или разблокирования. Квазинепрерывный сигнал можно получать, например, со множества переключателей включения/выключения, например, вдоль пути смещения или уровней механического сопротивления давлению. Истинный непрерывный сигнал можно получить с датчиков, таких как упомянутые датчики бесконтактных типов, с преобразователей давления, пьезоэлектрических устройств или основанных на дросселе и магните датчиков перемещения. Примеры использования этих ответных сигналов приведены под предыдущими заголовками.
Простой сигнал включения/выключения можно использовать в качестве переключателя, например, в простом двигателе, разблокирующем схему, или в качестве аналогового, но предпочтительно цифрового входного сигнала при более сложной обработке для автоматизации или управления. Квазинепрерывный сигнал можно использовать подобно каждому из множества переключателей, имеющих независимые схемы, для обеспечения различия между ними или как непрерывный сигнал, имеющий частоту импульсов включения/выключения, если переключатели расположены параллельно. Действительно непрерывный сигнал содержит еще больше информации и может обрабатываться иначе, чем сигнал включения/выключения.
Хотя все типы сигнала можно использовать простым способом, имеются некоторые преимущества в использовании сигнала более сложным способом. Во-первых, из сигнала можно извлекать больше информации для пользователя. Во-вторых, информацию сигнала можно использовать для компенсации случайных факторов в реакции устройства для выделения более достоверного обрабатываемого сигнала. В-третьих, прежнее свойство аппаратного средства можно заменить программным обеспечением, например, чтобы обеспечить меньшее или более простое устройство.
В соответствии с этим выход датчика можно контролировать относительно его сигнала, например амплитуду, прямо или косвенно, в сравнении с функцией переменной, и основанную на ней функцию, обрабатываемую до работы. Переменной может быть расстояние, формирующее функцию сигнала в зависимости от расстояния, например, когда перемещение также должно контролироваться, но предпочтительно переменной является время, формирующее функцию сигнала в зависимости от времени. Полученная функция может обрабатываться как непрерывная, но предпочитают осуществлять выборку значения с выхода устройства, что можно делать нерегулярно, но предпочтительно через регулярные временные интервалы с определенной частотой. Выборку можно выполнять любым из нескольких известных способов. Выборка может осуществляться в цифровой форме, в том смысле, что амплитуда сравнивается с опорным уровнем и либо устанавливается на двоичную 1, либо на двоичный 0, в зависимости от того, является ли амплитуда выше или ниже опорного уровня, который может изменяться, но предпочтительно является постоянным. Между прочим, для извлечения большей информации из исходных данных обычно предпочитают аналоговый способ выборки, в котором неоднократно регистрируется функция значения абсолютной амплитуды. Аналоговое значение можно обрабатывать в аналоговом процессоре, но наиболее предпочтительно преобразовывать значение в цифровую форму и обрабатывать его в цифровом процессоре. Сигнал можно по существу известным способом фильтровать с целью устранения некоторых частотных диапазонов или шума.
Значения функции можно запоминать и обрабатывать в любое время и с любой скоростью, но обычно в большинстве применений предпочитают обработку данных в реальном масштабе времени, которая может требовать еще некоторого запоминания значений, подлежащих одновременной обработке в любой данный момент времени. Обработка предпочтительно включает в себя по меньшей мере два, предпочтительно три и наиболее предпочтительно множество значений функции одновременно. Обработка может происходить в любом известном аналоговом или цифровом процессоре, предпочтительно содержащем микропроцессор типа стандартного микропроцессора или интегральной схемы определенного применения.
Обработку можно проводить с целью извлечения любой полезной информации в зависимости от времени для регистрации или немедленного действия для любой из описанных в качестве примера целей. Однако обработка предпочтительно дополнительно служит для изменения необработанного сигнала с устройства, чтобы сделать его более надежным для предполагаемой цели; некоторые из этих изменений будут описаны в качестве примеров.
Обработка может выполнять модель физического демпфирования перемещения устройства или датчика. В непрерывных положениях покоя его можно достигнуть, например, путем отфильтровывания некоторых частот, исключения путем усреднения перемещений вокруг точки равновесия или экстраполирования кривой регрессии. В дискретных положениях покоя аналогичный результат может быть основан на задержанной или повторенной проверке амплитуд, соответствующих положению, соответствующему устойчивому положению покоя.
Обработка может выполнять калибровку устройства, например, посредством регистрации фактического выходного сигнала устройства в определенных условиях, либо статически, например, для дискретных положений, либо динамически, для непрерывных перемещений, и (или) реакции устройства на различные возмущения, например, относительно изменений условий приведения в действие, условий окружающей среды и т.д.
Обработка может выполнять модель с целью обеспечения физического гистерезиса для перемещений устройства, например, путем требования некоторой степени изменения амплитуды для испускания сигнала, соответствующего изменению от одного положения к другому, например, для подавления частого перебрасывания вокруг точки равновесия.
Независимо от того, какие применяются принципы обработки сигнала, имеются некоторые возможности специального значения в настоящем контексте. В противоположность механическим решениям обработка сигнала должна предпочтительно обеспечить некоторый вид или обратимость действия, то есть после запуска последовательности операций, возможно, основанной на состоянии датчика, должна обеспечиваться возможность влияния на эту последовательность посредством заданного состояния сигнала с датчика. Например, если сигнал датчика показывает, что положение больше не является подходящим для текущей фазы операции типа проникновения или впрыскивания, устройство должно быть способно по меньшей мере выдать управляющий сигнал, предупреждающий и дающий возможность пользователю при следующем впрыскивании выполнить корректирующие меры, предпочтительно также остановить фазу операции для выполнения завершенного исправления и предпочтительно также перерассчитать или перепрограммировать средство процессора для подачи вспомогательной или дополнительной дозы, возможно, в зависимости от поступающей временной задержки.
Удобное использование возможности обратимости также может извлечь выгоду из вышеупомянутого свойства гистерезиса, то есть устройство должно обеспечить возможность некоторых допусков между разблокированием и блокированием или действием и обратным ходом. Это свойство может обеспечиваться средством обработки сигнала, как выше было показано в качестве примера, но также конструкцией датчика, например, посредством предоставления контактных поверхностей требуемой длины датчика переключательного типа или двухпозиционного переключателя, механическое смещение которого имеет некоторый неактивный диапазон давлений.
Устройство также предпочтительно оборудовано средством автоматизации или процессора, чувствительным к выходному сигналу датчика только в заранее определенном окне в операционной последовательности, например, после надлежащей идентификации патрона, смешивания, удаления воздуха, задержки, установления дозы и т.п. Средство также может быть чувствительным к выходному сигналу датчика, удовлетворяющему некоторым характерным критериям, например скорости изменения, поддерживаемому устойчивому изменению или повторению изменения, для различия между надлежащим и ненадлежащим условиями, непреднамеренным или случайным подтверждением.
Аппаратные средства
Система датчика в соответствии с настоящим изобретением может давать преимущества также в работающих полностью вручную устройствах подачи или в приводимых механически устройствах типа систем с взводимыми вручную пружинами, например, когда сигнал датчика используется для целей тревоги, индикации и сигнализации. Как было показано, сигнал датчика предпочтительно используется в автоматизированных устройствах, и для этой цели устройство должно включать в себя средство приведения в действие, содержащее по меньшей мере одно электромеханическое устройство со средством хранения энергии типа аккумуляторной батареи для целей приведения в действие. Связь между датчиком и электромеханическим устройством может иметь различные виды. Сигнал датчика может быть простым переключателем, непосредственно влияющим на электромеханическое устройство. Для выполнения описанных дополнительных функций может оказаться необходимой более сложная связь, либо аппаратная логика с дискретными компонентами, либо предпочтительно общее средство процессора типа универсального микропроцессора или интегральной схемы определенного применения.
Электромеханическое устройство может быть любым устройством, которое может подвергаться воздействию электрического средства с целью создания механического усилия. Электромеханическим устройством может быть устройство типа реле, или соленоида, или предпочтительно электродвигателя. Предпочитают, чтобы по меньшей мере механизм насоса управлялся или подвергался воздействию электромеханического средства. Другие функции также предпочтительно являются управляемыми электрическим средством, средством проникновения, возможно, со средством возвращения. Для простоты эти дополнительные возможности могут не требовать их собственного электромеханического средства приведения, а могут приводиться механическими средствами типа пружин, взводимых вручную, или с помощью простого электромеханического средства. В целях большей гибкости для таких дополнительных функций все же должно присутствовать по меньшей мере электромеханическое средство освобождения, например соленоиды, и, возможно, отдельное средство электродвигателя.
Краткое описание чертежей
Фиг. 1А и 1В схематично иллюстрируют предпочтительное устройство, имеющее датчик в форме подвижного колпачка иглы, причем на фиг. 1А и фиг. 1В изображен колпачок в выдвинутом и отведенном положении соответственно.
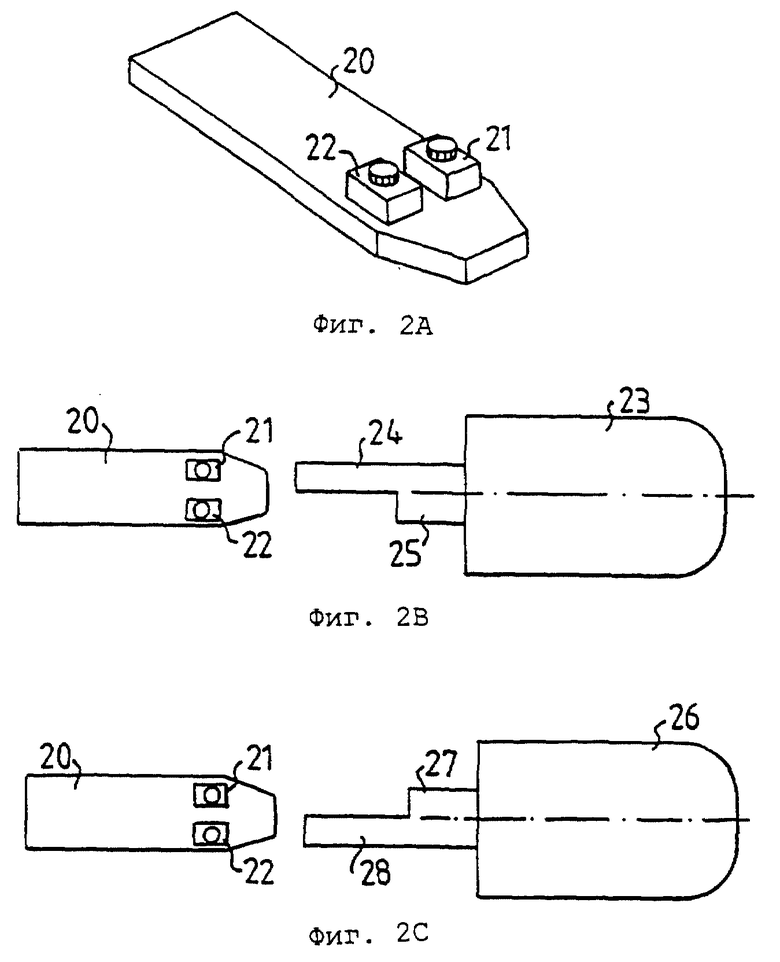
Фиг. 2А, 2В и 2С схематично иллюстрируют монтажную плату с переключателями, взаимодействующими с двумя разными защитными кожухами иглы.
Фиг. 3А и 3В показывают в двух видах предпочтительную конструкцию колпачка для иглы, использующую принципы, описанные в связи с фиг. 2.
Фиг. 4А-4D схематично иллюстрируют альтернативные элементы переключателя.
Описание чертежей
Фиг. 1А и 1В схематично иллюстрируют предпочтительное устройство, имеющее датчик, включающий подвижный колпачок иглы. Устройство в общем обозначено ссылочной позицией 1 и содержит кожух 2, емкость 3 типа шприца, имеющую передний конец с иглой 4 для инъекций и заднее отверстие со вставленным поршнем 5. Поршень подвергается воздействию плунжером 6, приводимым в действие электродвигателем 7. Поверх иглы 4 помещен колпачок 8, соосный с иглой и перемещаемый в осевом направлении вдоль иглы так, чтобы игла могла выходить через отверстие 9 в передней части колпачка. Прикрепленная к колпачку или изготовленная с ним за одно целое конструкция 10 приспособлена к тому, чтобы воздействовать на элемент 11 переключательного типа на кожухе 2. На фиг. 1 колпачок 8 находится в самом переднем положении, полностью защищая иглу 4, а конструкция 10 колпачка не совмещена с переключателем 11. На фиг. 1В передняя часть устройства 1 показана приведенной в соприкосновение с объектом 12, заставляя колпачок оттягиваться в заднее положение, в котором игла введена в объект, а конструкция 10 выровнена с переключателем 11. Колпачок предпочтительно может смещаться по направлению к самому переднему положению, показанному на фиг. 1А, например, с помощью пружины (не показанной). Конструкцией 10 предпочтительно может быть маленький магнит, вплавленный в колпачок из пластмассового материала, а переключателем 11 может быть компонент, открывающийся и закрывающийся под действием магнитного поля, типа элемента острякового стрелочного перевода, выдающего в схему сигнал включения/выключения. Ясно, что описанное устройство образует бесконтактный датчик, в котором обеспечивается изменение состояния, когда колпачок смещается объектом 12 к заднему положению, в котором переключатель 11 подвергается воздействию конструкции 10. Переключатель 11 установлен неподвижно относительно как кожуха 2, так и иглы 4, следовательно, считываемая близость также несет в себе заранее определенную связь с этими деталями, здесь с данной глубиной проникновения иглы. Также ясно, что изменение состояния по существу преобразуется в электромагнитный сигнал 13, здесь в форме сигнала включения/выключения, который передается по линии. Сигнал можно использовать сам по себе, как показано пунктирной линией 14, например, для непосредственного активирования электродвигателя 7, но предпочтительно сигнал можно обрабатывать более сложным путем, показанным сплошной линией, идущей к специальному процессору 15. Процессор 15 может быть любым из приведенных ранее в качестве примера в описании, решающим любую из приведенных в качестве примера задач. Предпочитают, чтобы устройство по меньшей мере частично было автоматизировано, например, с программами управления емкостью, программами инициирования емкости, установкой дозы и программами контроля, программами самоконтроля и программами посылки сообщений и т.д., и чтобы тот же процессор использовался по меньшей мере для некоторых из таких программ и для представленных целей типа простого контроля непрерывного сигнала, с целью предотвращения непреднамеренного приведения в действие и (или) положительной проверки любой из упомянутых автоматических функций. Показан первый исходящий управляющий сигнал 16, активирующий электродвигатель 7, и второй управляющий сигнал 17, управляющий сообщением на устройстве 18 отображения. Процессор 15 может быть устроен так, чтобы непосредственно запускать управляющие сигналы при приеме надлежащего электромагнитного сигнала 13 или предпочтительно также ожидать сигнала 19 приведения в действие кнопки ручного управления, чтобы благодаря этому обрабатывать надлежащий электромагнитный сигнал 13 только как сигнал разблокирования, прежде чем произойдет ручное приведение в действие. В обоих примерах предпочитают, чтобы процессор 15 продолжал контролировать линию, по которой передается электромагнитный сигнал 13 для обнаружения любого существенного отклонения в расположении, чтобы благодаря этому обеспечивать изменение в управляющих сигналах, например, выдавая предупреждающее сообщение по линии, по которой передается управляющий сигнал 17, и, возможно, прерывание сигнала 16 активизации двигателя.
Фиг. 2А, 2В и 2С схематично иллюстрируют монтажную плату с переключателями, взаимодействующими с двумя разными защитными кожухами иглы. Монтажная плата 20 предназначена для использования в устройстве подачи общего типа, показанного на фиг. 1, и может содержать (не показанные) электронные схемы и компоненты для любой описанной здесь цели. В настоящее время представляет интерес то, что плата имеет первый и второй переключатели 21 и 22, образующие части датчиковой системы вместе с двумя разными колпачками 23 и 26 иглы, показанными на фиг. 2В и 2С соответственно. Колпачок 23 иглы, показанный на фиг. 2В, имеет верхнее более длинное плечо 24 для взаимодействия с первым переключателем 21 и нижнее более короткое плечо 25 для взаимодействия со вторым переключателем 22. Когда колпачок 23 иглы должным образом собран на устройстве подачи, более длинное плечо 24 расположено так, чтобы постоянно закрывать первый переключатель 21, независимо от перемещения колпачка вперед и назад, позволяя тем самым электронике проверить присутствие и надлежащую установку колпачка, а также тип установленного колпачка. Короткое плечо 25 расположено так, чтобы закрывать второй переключатель 22, только когда колпачок иглы перемещен в заднее положение, тогда как при нахождении колпачка иглы в переднем положении переключатель не подвергается воздействию. Ясно, что в показанной на фиг. 2В ситуации первый переключатель 21 действует в качестве средства управления, в то время как второй переключатель 22 действует как часть системы считывания. Показанный на фиг. 2С колпачок 26 иглы аналогичен колпачку на фиг. 2В, за исключением того, что здесь верхнее плечо 27, предназначенное для взаимодействия с первым переключателем 21, является коротким плечом, а нижнее плечо 28, предназначенное для взаимодействия со вторым переключателем 22, является более длинным плечом. Ясно, что в показанной на фиг. 2С ситуации второй переключатель 22 действует в качестве устройства управления, в то время как первый переключатель 21 действует как часть системы считывания. Также ясно, что показанное на фиг. 2 устройство способно обнаруживать различия между типами установленного колпачка иглы 23 или 26, чтобы делать возможным различное поведение устройства в зависимости от используемого- типа колпачка иглы. Предпочтительное использование этой возможности заключается в том, чтобы сделать устройство, автоматически подающее текучую среду, когда колпачок иглы перемещен в заднее положение, без необходимости дальнейших действий, когда установлен один из типов 23 и 26 колпачков иглы соответственно, тогда как при установке другого типа колпачка иглы устройство только разблокируется, когда колпачок иглы перемещается в заднее положение, так что для действительного запуска подачи необходимо дополнительное действие, предпочтительно активизация ручной кнопки. Хотя колпачки 23 и 26 иглы описаны как разные детали, в равной степени устройство можно оборудовать одним колпачком иглы с двумя различными наборами плеч, которые по выбору можно выравнивать с переключателями, например, посредством расположения конструкций плеч фиг. 2В и 2С соответственно на диаметрально противоположных боковых сторонах одного колпачка иглы и производя изменение между ними путем поворота колпачка иглы на 180o.
На фиг. 3А и 3В показана в двух видах предпочтительная конструкция колпачка иглы, в которой используются принципы, описанные в связи с фиг. 2. Как лучше всего видно на фиг. 3В, колпачок 30 иглы содержит тело 31, имеющее переднее отверстие 32 для открывания иглы, когда колпачок иглы перемещается назад. На заднем конце расположены ножки 33 и 34 для крепления колпачка иглы к удлиненным прорезям (не показанным) на устройстве подачи, причем это крепление облегчается благодаря упругому характеру ножек и блокирующей защелке 35. Направляемый вырезами, колпачок 30 иглы может перемещаться между передним и задним положением. Как лучше видно на фиг. 3А, на теле 31 колпачка 30 иглы находится контактная конструкция 36. Контактная конструкция 36 обеспечивает длинное плечо 37 и короткое плечо 38. Плечи 37 и 38 имеют такую же функцию, как плечи, описанные в связи с фиг. 2, то есть длинное плечо 37 постоянно нажимает на один переключатель на устройстве, а короткое плечо 38 нажимает на другой переключатель на устройстве только тогда, когда колпачок 30 иглы переведен в заднее положение, в котором через отверстие 32 наружу из колпачка иглы выступает подходящая длина иглы.
Фиг. 4А-4D схематично иллюстрируют альтернативные элементы переключателя для использования в датчике. На всех этих чертежах главная деталь элемента переключателя смонтирована на подложке 40, укрепленной неподвижно относительно кожуха устройства подачи, в то время как деталь 41 может передвигаться относительно подложки 40, хотя также возможен противоположный вариант. Подвижной деталью 41 может быть колпачок иглы или любая другая описанная деталь считывания. Полагают, что на чертежах подвижная деталь 41 может перемещаться слева направо. На фиг. 4А элемент 42 переключателя содержит двухпозиционную контактную пластину, переключающую из одного состояния в другое при нажатии вниз подвижной деталью 41. На фиг. 4В элемент 43 переключателя аналогично этому становится проводящим, когда упругая проводящая подставка нажимается через промежуток в проводящей схеме на подложке 40. На фиг. 4С элемент 44 переключателя содержит деталь, чувствительную к магнитному полю, типа элемента на эффекте Холла или выступающего элемента, а подвижная деталь 41 содержит магнитный элемент, способный вызвать изменение состояния в переключателе 44. На фиг. 4D переключатель содержит передающее устройство 46 излучения, например инфракрасного излучения, и приемное устройство 47 излучения, способное обнаружить изменение в принимаемом излучении, вызываемое наличием и отсутствием соответственно подвижной детали 41 на приемном устройстве.


Изобретение относится к медицинской технике и может быть использовано при инъекциях. Устройство включает кожух, емкость для текучей среды, размещенную в кожухе, где емкость имеет отверстие, трубку подачи, соединенную в жидкостной связи с отверстием, имеющую передний конец в отношении потока, отдаленный от емкости, и задний конец в отношении потока, ближайший к емкости, передний и задний концы определяют ось между ними и прямое и обратное направления, и насос, приспособленный для подачи текучей среды по меньшей мере в направлении от емкости по трубке. Устройство содержит датчик, способный изменять состояние по меньшей мере в одном отношении в ответ на заранее определенную близость объекта к датчику в направлении восприятия, преобразователь, отдельный или изготовленный за одно целое с датчиком, преобразующий по меньшей мере одно из состояний датчика в электромагнитный сигнал, и процессор, принимающий электромагнитный сигнал и выдающий управляющий сигнал в операционный компонент устройства. Технический результат заключается в гранулированном обеспечении подачи доз лекарственных препаратов. 3 с. и 54 з.п. ф-лы, 4 ил.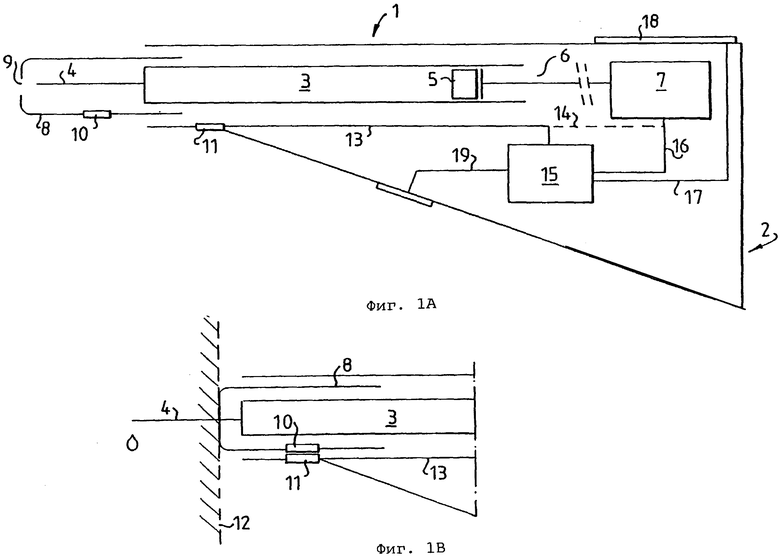
| DE 4420232 А1, 14.12.1995 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 4908017 А, 13.03.1990. | |||

