Область техники, к которой относится изобретение
Изобретение относится к определению необходимой степени заряженности (SOC) для зарядки тяговой аккумуляторной батареи в электротранспортном средстве (электромобиле).
Уровень техники
Электромобиль, как правило, содержит электродвигатель и высоковольтную аккумуляторную батарею. Высоковольтная аккумуляторная батарея характеризуется степенью заряженности (SOC) и подает электрический ток на электродвигатель для привода транспортного средства. Степень заряженности батареи уменьшается, когда батарея подает электроток для привода транспортного средства.
Когда степень заряженности батареи снижается во время цикла езды, может быть целесообразным использовать кинетическую энергию транспортного средства и преобразовывать ее в электрическую энергию для подзарядки батареи, например, во время торможения транспортного средства. Тем не менее, батарея не может запасать кинетическую энергию транспортного средства, если она полностью заряжена. Например, батарея может иметь полную зарядную емкость при уровне заряда 100% и не может накапливать энергию торможения во время цикла езды, который начинается, когда транспортное средство находится на вершине холма.
Источник питания, внешний для транспортного средства, например бытовой электрический разъем в электрической сети, может использоваться для зарядки или подзарядки батареи до уровня заряда 100%. Тем не менее, может быть целесообразным или необходимым использовать внешний источник питания для зарядки батареи до необходимой степени заряженности ниже 100% уровня заряда до начала цикла езды с тем, чтобы батарея могла рекуперировать энергию торможения во время цикла езды, например, когда транспортное средство начинает цикл езды на вершине холма.
Раскрытие изобретения
Варианты реализации сущности настоящего изобретения в общем представляют способ и систему определения необходимой степени заряженности для зарядки тяговой аккумуляторной батареи в электромобиле с использованием электроэнергии от источника, расположенного вне транспортного средства. Кроме того, для выполнения способа определения необходимой степени заряженности предусмотрен, по крайней мере, один логический носитель информации с кодом, читаемым логическим устройством.
В ходе представленного способа определяют профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована во время части будущего цикла езды транспортного средства. Аналогичным образом определяют профиль энергии, которая, как ожидается, будет использована от батареи во время этой же части будущего цикла езды транспортного средства. На основании установленных профилей энергии определяют необходимую степень заряженности батареи для зарядки до начала цикла езды.
Необходимую степень заряженности можно определять на основании количества энергии рекуперативного торможения, которая предположительно будет рекуперирована в первой части будущего цикла езды. Первая часть будущего цикла езды может быть определена как часть будущего цикла езды от начала цикла езды до конца временного интервала, когда профиль энергии, которая предположительно будет использоваться от батареи, в существенной степени превышает профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована в течение данного временного интервала.
Скорость зарядки для зарядки батареи в течение первой части будущего цикла езды можно определить на основании количества энергии рекуперативного торможения, которая предположительно будет рекуперирована, например, во время первой части будущего цикла езды. Кроме того, скорость зарядки можно определить на основании количества энергии батареи, необходимого для выполнения будущего цикла езды. Необходимую степень заряженности можно определить по скорости зарядки. Необходимую степень заряженности можно рассчитать как величину, обратно пропорциональную скорости зарядки.
В способе может быть определено количество энергии батареи, необходимое для выполнения будущего цикла езды. Можно определить необходимую степень заряженности, которая будет верхним пределом заданного рабочего диапазона степени заряженности, причем верхний предел представляет собой, по меньшей мере, количество энергии батареи, необходимое для выполнения будущего цикла езды. Кроме того, необходимую степень заряженности можно определить по усилию, прилагаемому для того, чтобы максимизировать время, в течение которого батарея работает в заданном рабочем диапазоне степени заряженности в течение будущего цикла езды. Заданный диапазон степени заряженности может находиться в интервале между 10% и 90% от максимальной степени заряженности батареи.
Необходимую степень заряженности можно определить по усилию, прилагаемому для того, чтобы максимизировать количество энергии рекуперативного торможения, которую транспортное средство получает в течение будущего цикла езды. Можно обрабатывать информацию об ожидаемом пути пробега транспортного средства во время цикла езды. Информация об ожидаемом пути пробега может включать в себя информацию о длинах и углах уклона соответствующих участков ожидаемого пути пробега, один или несколько показателей, вводимых пользователем, в том числе информацию о планируемом пункте назначения транспортного средства, количествах энергии рекуперативного торможения, рекуперированной во время предыдущих циклов езды транспортного средства, возникших на по меньшей мере части ожидаемого пути пробега, о времени суток, когда количества энергии рекуперативного торможения были рекуперированы в предыдущем цикле езды, о дне недели, когда количества энергии рекуперативного торможения были рекуперированы в предыдущем цикле езды, или их комбинации. Профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована, и профиль энергии, которая предположительно будет использована, можно определить на основании ожидаемого пути пробега.
Система включает в себя по меньшей мере одно логическое устройство. Логическое устройство определяет необходимую степень заряженности для зарядки батареи до начала цикла езды транспортного средства с использованием электроэнергии от внешнего источника питания. Необходимая степень заряженности может определяться на основании профилей энергии рекуперативного торможения, которая предположительно будет рекуперирована и будет использована в течение части будущего цикла езды. Логическим устройством может быть контроллер, который содержит процессор для выполнения команд программного обеспечения, компьютерную память для хранения команд программного обеспечения, к которой обращается процессор, и набор программных команд, хранящихся в памяти, для определения необходимой степени заряженности.
Краткое описание чертежей
На Фиг.1 представлена функциональная схема, изображающая электромобиль с аккумуляторной батареей и внешним для транспортного средства источником питания для зарядки батареи до необходимой степени заряженности в соответствии с одним вариантом;
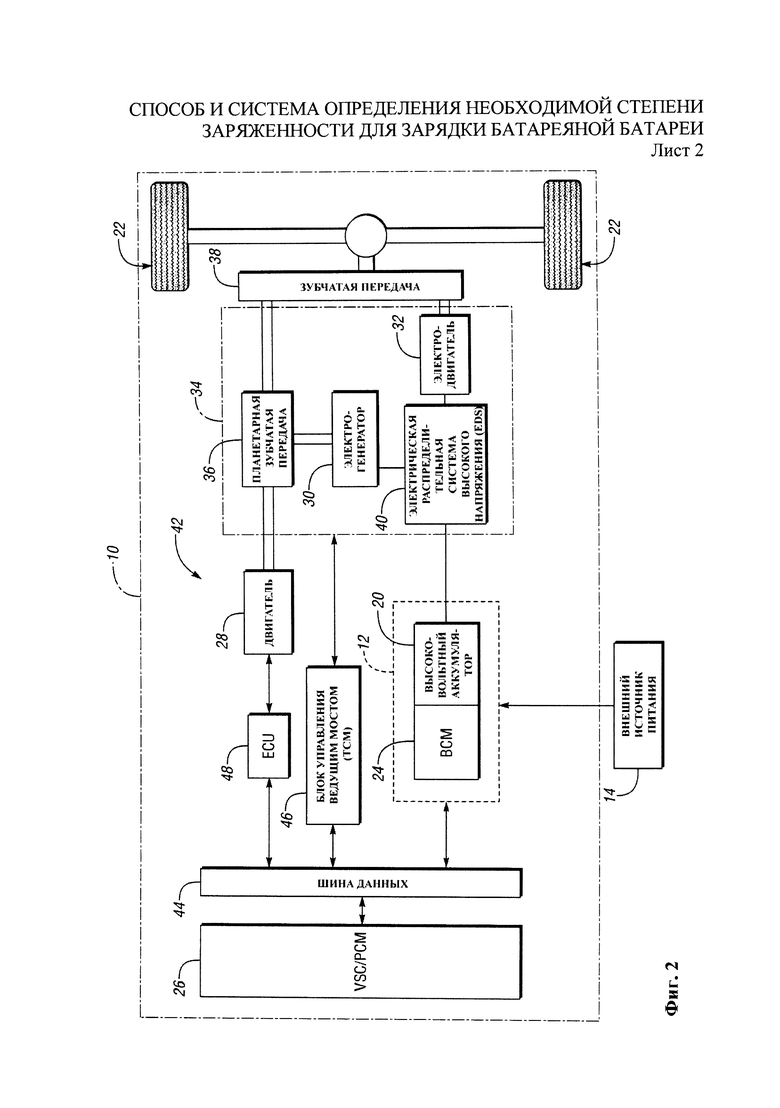
На Фиг.2 представлена функциональная схема, изображающая систему, содержащую по меньшей мере одно логическое устройство для зарядки батареи до необходимой степени заряженности при помощи внешнего источника питания в соответствии с одним вариантом;
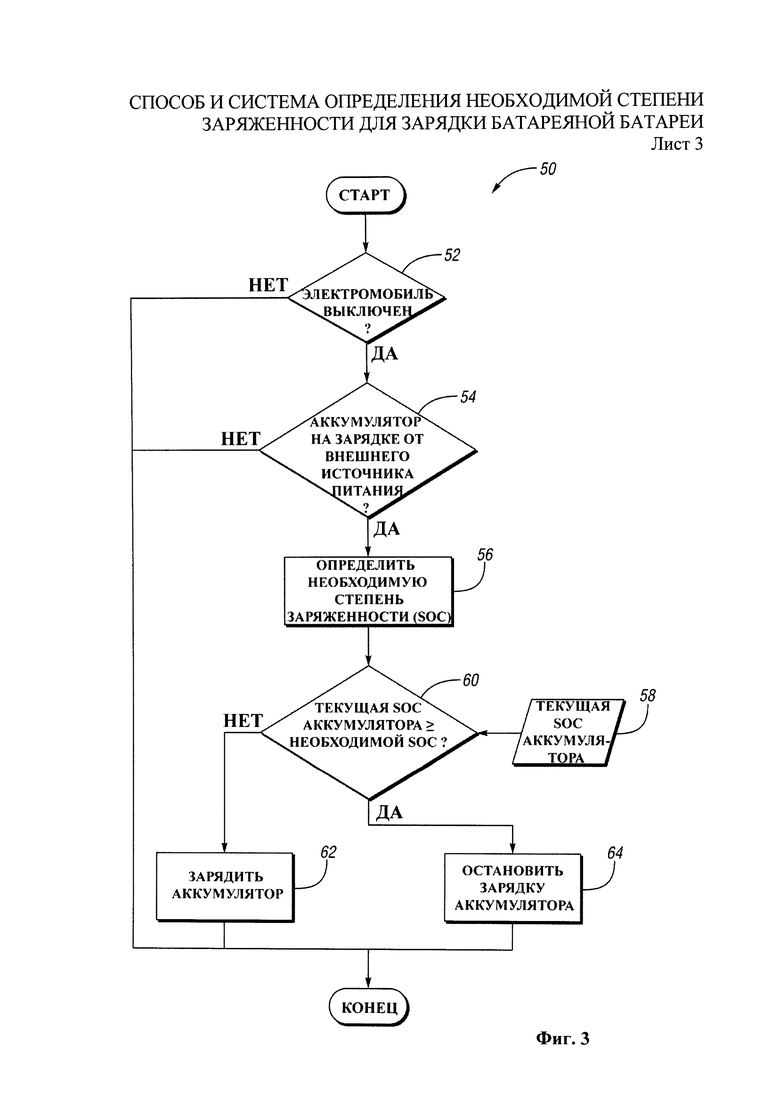
На Фиг.3 показана блок-схема, иллюстрирующая общий способ определения необходимости зарядки батареи в соответствии с одним вариантом;
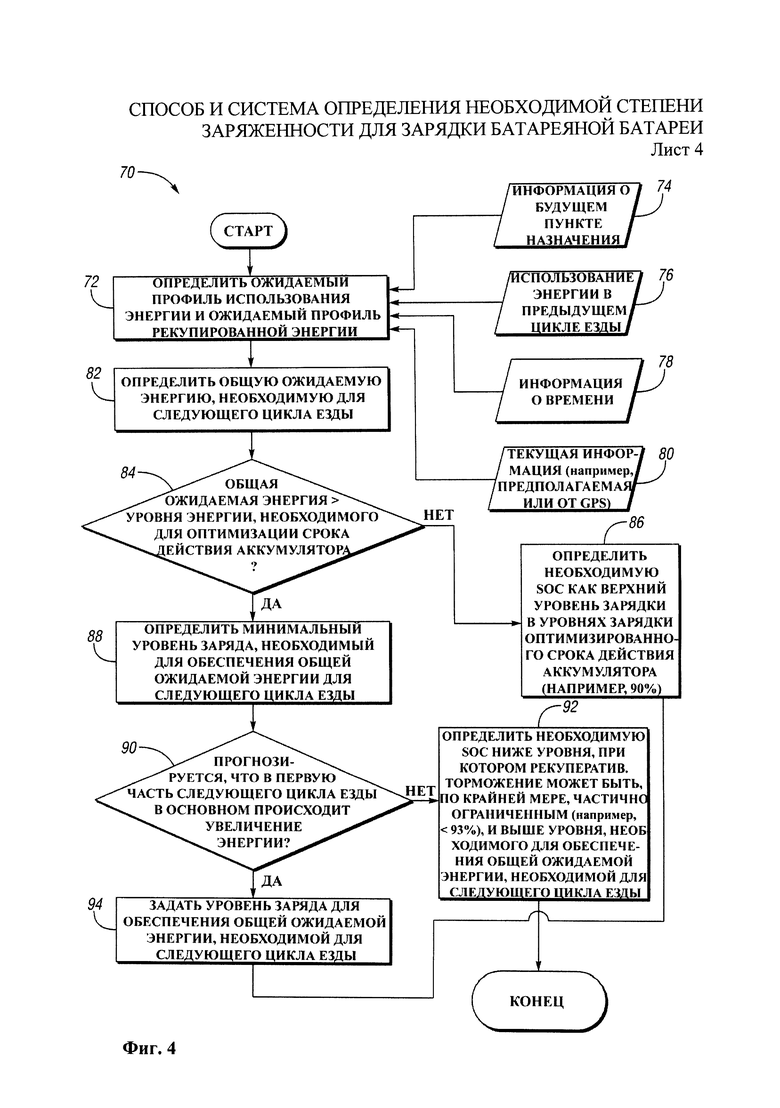
На Фиг.4 показана блок-схема, иллюстрирующая способ определения необходимой степени заряженности для зарядки батареи в соответствии с одним вариантом;
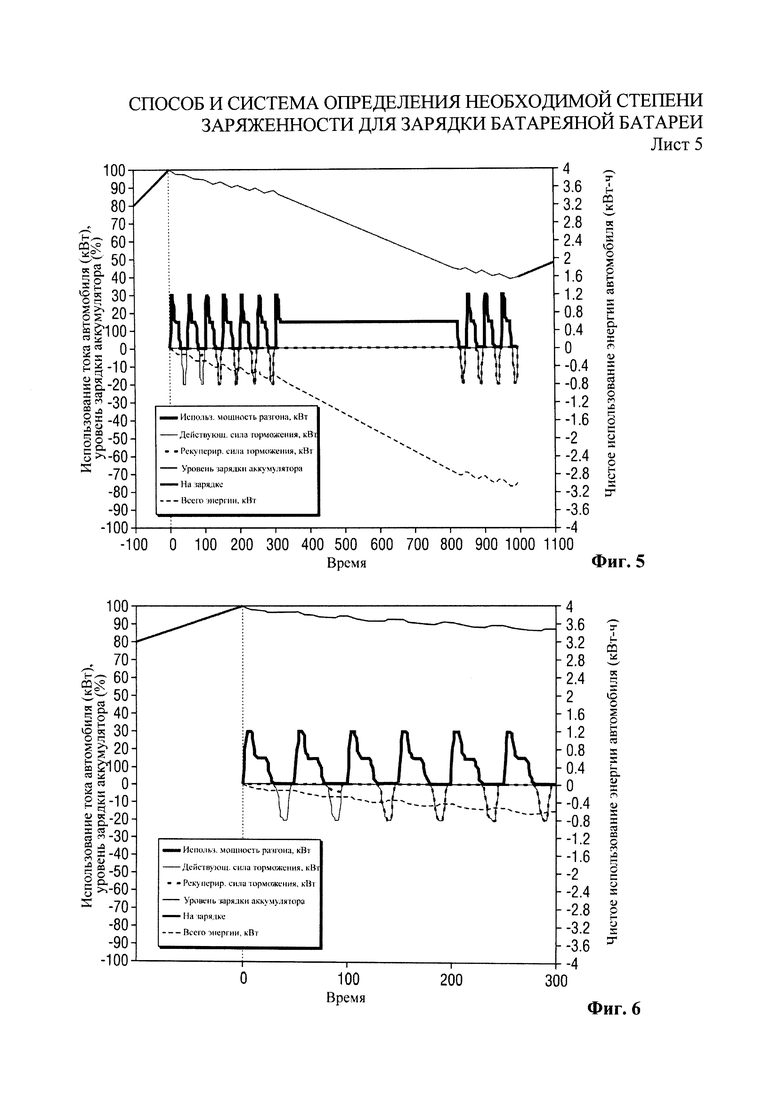
На Фиг.5 показана диаграмма, иллюстрирующая уровни заряда батареи (в %) и уровни потребления энергии в электромобиле (кВт) в различные моменты времени в течение цикла езды, начинающегося с уровня заряда батареи 100%;
На Фиг.6 показана диаграмма, иллюстрирующая первую часть цикла езды, показанного на Фиг.5, и батарея, не рекуперирующая всю энергию рекуперативного торможения во время первых двух остановок транспортного средства вследствие ограниченности зарядки батареи;
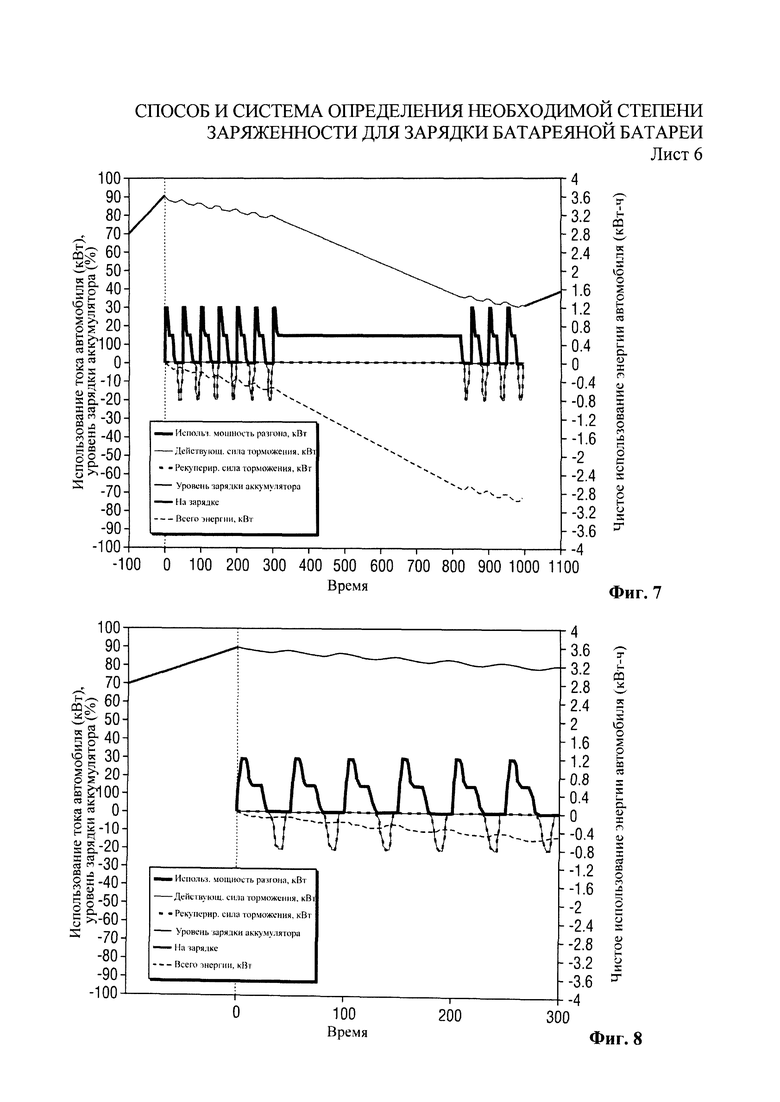
На Фиг.7 представлена диаграмма, аналогичная Фиг.5, но иллюстрирующая состояние батареи с уровнем заряда 90% до начала цикла езды в соответствии с одним вариантом; и
На Фиг.8 показана диаграмма, иллюстрирующая первую часть цикла езды, показанного на Фиг.7, и батарея, рекуперирующая практически всю энергию рекуперативного торможения во время первых двух остановок транспортного средства без ограничения зарядки батареи, как показано на Фиг.5-6, в соответствии с одним вариантом.
Осуществление изобретения
Далее подробно описаны способы воплощения настоящего изобретения; однако следует понимать, что представленные здесь варианты осуществления изобретения являются лишь примерами изобретения, которые могут быть реализованы в различных альтернативных вариантах. На чертежах не всегда соблюдены реальные размеры, некоторые элементы могут быть увеличены или уменьшены с целью демонстрации деталей определенных составных частей. Таким образом, специфические структурные и функциональные детали, раскрытые в настоящем изобретении, следует рассматривать не в качестве ограничения, а в качестве иллюстративной части для изучения специалистами в данной области техники с целью различного применения настоящего изобретения.
Варианты реализации настоящего изобретения в общем представляют способ и систему определения необходимой степени заряженности для зарядки батареи в электромобиле с использованием электроэнергии от внешнего источника питания. Зарядка батареи до необходимой степени заряженности происходит до начала цикла езды транспортного средства.
На Фиг.1 электротранспортное средство 10 (далее - «электромобиль») снабжен зарядным устройством 12. Электромобиль 10 может быть любого типа, который может электрически соединяться или подключаться к источнику питания 14, внешнему для электромобиля 10 (далее «внешний источник питания»). Например, электромобилем 10 может быть электромобиль с подзарядкой от сети, гибридный электромобиль с подзарядкой от сети (PHEV), иной электромобиль с подзарядкой от сети, аккумуляторный электромобиль (BEV), полностью электрическое транспортное средство и т.д. Фраза «электромобиль с подзарядкой от сети» относится к любому типу транспортных средств, которые могут подключаться к внешнему источнику питания 14 для получения электроэнергии от внешнего источника питания 14. Таким образом, например, электромобилем 10 может быть транспортное средство, в котором установлена штепсельная розетка 16, в которую вставляется штепсельная вилка 18 для передачи электроэнергии от внешнего источника питания 14 через штепсельную вилку 18 в электромобиль 10.
Как показано на Фиг.2, зарядное устройство 12 встроено в силовую цепь гибридного электромобиля с параллельным/последовательным подключением (PSHEV). Тем не менее, зарядное устройство 12 может быть установлено в любом типе электромобиля. Например, электромобилем 10 может быть гибридный электромобиль с последовательным подключением (SHEV), гибридный электромобиль с параллельным подключением или транспортное средство, использующее только электрическую энергию.
На Фиг.1-2 внешний источник питания 14 может подавать электроток в электромобиль 10. Например, внешним источником питания 14 может быть станция зарядки электромобилей или стандартная бытовая электрическая розетка, подсоединенная к электросети. Электросеть снижает напряжение тока с высокого, например 7200 вольт, до более низкого, например 240 вольт. Кроме того, внешним источником питания 14 может быть источник постоянного и/или переменного тока. Например, внешним источником питания 14 может быть сетевая розетка на 120 В или 240 В переменного тока. В другом примере, внешним источником питания 14 может быть сетевая розетка на 300 В постоянного тока.
Как показано на Фиг.2, электромобиль 10 включает в себя высоковольтную батарею 20 («HV батарея»). Будучи устройством, которое может накапливать электроэнергию, высоковольтная батарея 20 характеризуется степенью заряженности. Степень заряженности высоковольтной батареи 20 варьируется в зависимости от количества электроэнергии в высоковольтной батарее 20. Уровень заряда батареи может представлять собой степень заряженности высоковольтной батареи 20 в виде процента от электрической емкости высоковольтной батареи 20. Например, уровень заряда батареи может варьироваться от нуля процентов (0%) до ста процентов (100%).
В эксплуатации высоковольтная батарея 20 накапливает или подает электроэнергию на различные компоненты электромобиля 10. Например, высоковольтная батарея 20 может подавать ток для приведения в движение колес 22 таким образом, чтобы электромобиль 10 мог двигаться. В данном примере высоковольтная батарея 20 может подавать постоянный ток напряжением 300 В для вращения приводных колес 22 и перемещения электромобиля 10. Когда высоковольтная батарея 20 подает электроток или питание, степень заряженности высоковольтной батареи 20 снижается и, следовательно, снижается уровень заряда батареи. Тем не менее, электроток от внешнего источника питания 14 может использоваться для зарядки или повышения степени заряженности высоковольтной батареи 20 между циклами езды электромобиля 10.
Со ссылкой на Фиг.2, электромобиль 10 может включать в себя блок 24 управления батареей (далее «ВСМ»). ВСМ 24 управляет высоковольтной батареей 20 либо самостоятельно, либо вместе с системным контроллером транспортного средства (VSC), блоком управления трансмиссией (РСМ) или посредством их комбинации. Комбинация VSC и РСМ далее именуется «VSC/PCM» и имеет ссылочную позицию 26.
Блок управления батареей 24 на Фиг.2 может управлять высоковольтной батареей 20 в отношении подачи электроэнергии, накопления электроэнергии, получения электроэнергии от внешнего источника питания 14 или комбинации этих операций. Кроме того, блок 24 управления батареей может управлять уровнем заряда высоковольтной батареи 20 с целью увеличения степени заряженности, поддержания степени заряженности или снижения степени заряженности высоковольтной батареи 20. Например, блок 24 управления батареей может управлять тем, когда и/или какое количество электроэнергии от внешнего источника питания 14 использовать для зарядки или подзарядки высоковольтной батареи 20 до необходимой степени заряженности. Необходимую степень заряженности можно определить на основании ряда переменных или входных данных Блок 24 управления батареей, VSC/PCM 26 или их комбинация могут использоваться для определения или расчета необходимой степени заряженности высоковольтной батареи 20. Кроме того, блок 24 управления батареей, самостоятельно или вместе с VSC/PCM 26, может использоваться для зарядки высоковольтной батареи 20 до необходимой степени заряженности.
Хотя блок управления батареей 24 и высоковольтная батарея 20 на Фиг.2 показаны как часть зарядного устройства 12, блок 24 управления батареей может работать отдельно от зарядного устройства 12. Кроме того, блок 24 управления батареей и VSC/PCM 26 могут объединяться для работы в форме единого аппаратного устройства в электромобиле 10.
На Фиг.2 электромобиль 10, например гибридное транспортное средство с параллельным/последовательным подключением двигателей (PSHEV), показанное на Фиг.2, может включать в себя двигатель 28. Двигатель 28 и высоковольтная батарея 20 могут избирательно подавать энергию для приведения в движение колес 22 таким образом, чтобы электромобиль 10 мог двигаться. В ходе работы высоковольтная батарея 20 может получать электроэнергию от электрогенератора 30, подавать электроэнергию на электродвигатель 32 и запитывать прочие работающие от электричества устройства в электромобиле 10.
Как показано на Фиг.2, электромобиль 10 включает в себя узел 34 ведущего моста с коробкой передач («трансэксл»). Узел 34 ведущего моста с коробкой передач аналогичен трансмиссии в традиционном автомобиле. Узел 34 ведущего моста с коробкой передач может включать в себя электрогенератор 30, электродвигатель 32, планетарную зубчатую передачу 36 и зубчатую передачу 38 (редуктор). Узел 34 ведущего моста с коробкой передач на Фиг.2 установлен между приводными колесами 22, двигателем 28 и высоковольтной батареей 20 для управления тем, как и когда подавать электроэнергию на приводные колеса 22. Электродвигатель 32 и электрогенератор 30 представляют собой две электрические машины, которые составляют конструктивную схему электрической машины. Таким образом, электродвигатель 32 и электрогенератор 30 каждый представляют собой часть конструктивной схемы электрической машины. Однако электромобиль 10 может иметь другие конструктивные схемы электрической машины, например, содержащие больше или меньше двух электрических машин.
На Фиг.2 планетарная передача 36 узла 34 ведущего моста с коробкой передач механически соединяет двигатель 28, приводные колеса 22 через зубчатую передачу 38 и электрогенератор 30. Например, электрогенератор 30 может подключаться к солнечной шестерне планетарной зубчатой передачи 36, тогда как двигатель 28 и приводные колеса 22 соответственно соединяются с водилом планетарной передачи и коронной шестерней планетарной передачи 36.
Как показано на Фиг.2, электромобиль 10 может включать в себя высоковольтную электрическую распределительную систему 40 (далее «EDS»). EDS 40 может получать электроэнергию от электрогенератора 30 и направлять электроэнергию либо на высоковольтную батарею 20, либо в электродвигатель 32, в зависимости от режима движения электромобиля 10. EDS 40 также может получать электроэнергию от высоковольтной батареи 20 и/или электродвигателя 32 и направлять электроэнергию в зарядное устройство 12, электродвигатель 32, электрогенератор 30 или комбинированно на эти нагрузки.
Как показано на Фиг.2, транспортное средство 10 включает в себя по меньшей мере одно логическое устройство или контроллер 42 для выполнения способа определения необходимой степени заряженности для зарядки высоковольтной батареи 20 в электромобиле 10. Контроллер или логическое устройство 42 могут быть выполнены с применением различных типов или различных комбинаций электронных устройств и/или микропроцессорных компьютеров или контроллеров. Для выполнения способа определения необходимой степени заряженности для зарядки высоковольтной батареи 20 контроллер 40 может выполнить компьютерную программу, или алгоритм, или логическую схему управления, в которых встроен или запрограммирован способ и которые хранятся в энергозависимой памяти и/или постоянной памяти. В ином случае логическая схема управления может быть запрограммирована в логической или вентильной матрице, хранящейся на одном или нескольких кристаллах интегральных схем. Логическая схема управления может выполняться в программных, аппаратных средствах или в комбинации программных и аппаратных средств на одном или нескольких контроллерах и/или электронных устройствах в зависимости от конкретного приложения. При выполнении ее в программных средствах предпочтительнее, чтобы логическая схема управления была представлена на одном или нескольких машиночитаемых носителях информации, на которых сохраняются данные, составляющие программу или команды, выполняемые компьютером для управления зарядкой высоковольтной батареи 20. Машиночитаемые носители информации могут включать в себя один или несколько известных физических устройств, в которых используются электрические, магнитные, оптические и/или гибридные накопители для хранения выполняемых команд и связанной с ними информации о калибровке, рабочих параметрах и тому подобном.
На Фиг.2 показано, что контроллер 42 включает в себя блок 24 управления батареей. Хотя контроллер 42 показан в виде единого аппаратного устройства, контроллер 42 может включать в себя множество логических устройств в форме различных аппаратных устройств или различные программные логические устройства в одном или нескольких аппаратных устройствах. Например, контроллер 42 может включать в себя VSC/PCM 26, блок 24 управления батареей (ВСМ), еще один контроллер в электромобиле 10 или какое-либо их сочетание. Таким образом, контроллер 42 может быть элементом зарядного устройства 12, или же контроллер 42 может быть установлен отдельно от зарядного устройства 12.
Как показано на Фиг.2, VSC/PCM 26 может управлять рядом компонентов или устройств в электромобиле 10 при помощи шины данных 44 транспортного средства (далее «шина данных»). Например, VSC/PCM 26 управляет зарядным устройством 12, узлом 34 ведущего моста с коробкой передач через блок 46 управления ведущим мостом (ECU), и двигателем 28 через блок 48 управления двигателем (ТСМ). Шина данных 44 соединена с различными компонентами в электромобиле 10, включая контроллер 42, ECU 46 и ТСМ 48. Шина данных 44 может быть выполнена в форме контроллерной сети (CAN), коммутируемой локальной сети (LIN) или иной подходящей линии передачи данных, которая может передавать данные между VSC/PCM 26 и прочими устройствами в электромобиле 10.
Блок 24 управления батареей управляет потоком электроэнергии, идущим на высоковольтную батарею 20 и от нее. Например, блок 24 управления батареей может управлять тем, когда высоковольтная батарея 20 подает и накапливает электроэнергию высокого напряжения. Зарядное устройство 12 может включать в себя один или несколько преобразователей энергии для получения электроэнергии от внешнего источника питания 14 и преобразовывать электроэнергию в более подходящую форму электроэнергии для зарядки высоковольтной батареи 20. Например, блок 24 управления батареей 24 может управлять преобразователем переменного тока в постоянный ток в зарядном устройстве 12 с тем, чтобы управлять зарядкой высоковольтной батареи 20 переменным электрическим током от внешнего источника питания 14. В другом примере блок 24 управления батареей может управлять преобразователем постоянного тока в постоянный ток с тем, чтобы управлять зарядкой высоковольтной батареи 20 постоянным электрическим током от внешнего источника питания 14.
VSC/PCM 26 и блок 46 управления ведущим мостом осуществляют управление различными режимами узла 34 ведущего моста с коробкой передач, например режимом электропривода электромобиля 10 во время цикла езды. Режим электропривода электромобиля 10 обеспечивает функционирование электродвигателя 32 в функции двигателя, в функции электрогенератора для подачи электроэнергии для работы электромобиля 10 или в обеих функциях. Режим электропривода электромобиля 10 можно использовать для приведения в действие приводных колес 22 и продвижения электромобиля 10. Кроме того, зарядное устройство 12 может заряжать высоковольтную батарею 20 электроэнергией от электрической распределительной системы 40 во время режима рекуперативного торможения электромобиля 10 или от внешнего источника питания 14 до передвижения транспортного средства из одного места в другое.
На Фиг.3 представлена блок-схема 50 для демонстрации работы контроллера 43 и/или зарядного устройства 12, а также этапов общего способа определения необходимости зарядки высоковольтной батареи 20 согласно одному варианту. Электромобиль 10 и компоненты, изображенные на Фиг.1-2, могут указываться в ходе обсуждения способа для облегчения понимания различных его аспектов. Диаграмма на Фиг.3 представляет собой стандартную стратегию управления для определения необходимости зарядки высоковольтной батареи 20, например, до необходимой степени заряженности.
В блоке 52 принятия решения блок-схемы 50 определяют, выключен ли электромобиль 10. Может быть определено, что электромобиль 10 выключен, когда узел 34 ведущего моста с коробкой передач и/или двигатель 28 не приводит в движение колеса 22 электромобиля 10. VSC/PCM 26 самостоятельно или вместе с блоком 46 управления ведущим мостом и/или блоком 48 управления двигателем может использоваться для определения того, выключен ли электромобиль. Если определено, что электромобиль выключен, то осуществляется переход в блок 54 принятия решения.
В блоке 54 принятия решения, показанном на Фиг.3, определяют, находится ли высоковольтная батарея 20 «на зарядке» или заряжается от внешнего источника питания 14. Блок 24 управления батареей, самостоятельно или вместе с VSC/PCM 26, может использоваться для определения того, находится ли высоковольтная батарея 20 «на зарядке» или заряжается от внешнего источника питания 14. Например, может быть определено, что электромобиль 10 находится «на зарядке», когда в штепсельную розетку 16 вставлена штепсельная вилка 18 зарядки. Таким образом, транспортное средство может быть «на зарядке», даже когда от внешнего источника питания 14 на высоковольтную батарею 20 не подается электроэнергия. Если высоковольтная батарея 20 находится «на зарядке» или заряжается от внешнего источника питания 14, переходят в блок 56.
В блоке 56 определяют необходимую степень заряженности (SOC). Например, необходимая степень заряженности может составлять 90% (девяносто процентов). На Фиг.7-8 показана высоковольтная батарея 20 с целевой степенью заряженности 90% в начале цикла езды электромобиля 10 (т.е. время = 0). Блок 24 управления батареей, VSC/PCM 26 или их комбинация могут использоваться для определения или расчета необходимой степени заряженности высоковольтной батареи 20 на основании ряда переменных или входных данных. Блок 56 (показан на Фиг.3) может соответствовать блок-схеме 70 (показана на Фиг.4).
В блоке 58 получают данные о текущей степени заряженности высоковольтной батареи 20 и переходят в блок 58. Например, текущая степень заряженности может составлять 90% (девяносто процентов) на относительно низком уровне заряда или 97% (девяносто семь процентов) на относительно высоком уровне заряда. Блок 24 управления батареей может получить текущую степень заряженности высоковольтной батареи 20 для логического устройства или контроллера 42 и/или зарядного устройства 12. Таким образом, контроллер 42 может получать значение текущей степени заряженности высоковольтной батареи 20 либо путем ее определения в самом контроллере 42, либо из получаемого контроллером 42 сигнала, внешнего для контроллера 42, например, от блока 24 управления батареей, в зависимости от конфигурации контроллера 42.
В блоке 60 принятия решения определяют, превышает ли текущая степень заряженности высоковольтной батареи 20 необходимую степень заряженности или равна ей. Блок 24 управления батареей, VSC/PCM 26, зарядное устройство 12 или их комбинация могут использоваться для определения того, превышает ли текущая степень заряженности высоковольтной батареи 20 необходимую степень заряженности или равна ей. Если текущая степень заряженности высоковольтной батареи 20 ниже необходимой степени заряженности, то зарядное устройство 12 начинает зарядку высоковольтной батареи 20 или продолжает зарядку высоковольтной батареи 20 в блоке 62. В противном случае, если текущая степень заряженности высоковольтной батареи 20 превышает необходимую степень заряженности или равна ей, то зарядное устройство 12 прекращает зарядку высоковольтной батареи 20 в блоке 64. Таким образом, необходимая степень заряженности может использоваться для управления тем, когда следует заряжать высоковольтную батарею 20, а также тем, какое количество электроэнергии от внешнего источника питания 14 используется для зарядки высоковольтной батареи 20.
В блоке 62 осуществляют зарядку высоковольтной батареи 20. Высоковольтная батарея 20 либо начинает, либо продолжает заряжаться электротоком от внешнего источника питания 14. Зарядное устройство 12 и/или блок 24 управления батареей могут заряжать высоковольтную батарею 20 до необходимой степени заряженности. Из блока 62 может выполняться циклический возврат в блок 52 до тех пор, пока не будет достигнута по крайней мере необходимая степень заряженности высоковольтной батареи 20, пока не будет определено, что электромобиль 10 выключен, или пока не будет определено, что высоковольтная батарея 20 более не находится в состоянии «на зарядке» или не заряжается от внешнего источника питания 14.
В блоке 64 зарядное устройство 12 прекращает зарядку высоковольтной батареи 20. Например, зарядное устройство 12 и/или блок 24 управления батареей могут использоваться для прерывания передачи электроэнергии от внешнего источника питания 14 на высоковольтную батарею 20 для остановки зарядки высоковольтной батареи 20. Блок 64 может возвращать в блок 52 для отслеживания состояния электромобиля 10 и/или высоковольтной батареи 20.
На Фиг.4 представлена блок-схема 70 для отображения этапов способа определения необходимой степени заряженности (SOC) для зарядки высоковольтной батареи 20 с использованием электроэнергии от внешнего источника питания 14. Электромобиль 10 и компоненты, изображенные на Фиг.1-2, могут указываться в ходе обсуждения способа для облегчения понимания различных его аспектов. Один или несколько этапов, показанных на блок-схеме 70, могут соответствовать блоку 46 блок-схемы 50 (показана на Фиг.3).
В блоке 72 определяют ожидаемый профиль использования электроэнергии и ожидаемый профиль рекуперации энергии. Ожидаемый профиль использования электроэнергии включает профиль энергии от высоковольтной батареи 20, которая предположительно будет использована во время следующего цикла езды электромобиля 10. Профиль энергии, которая предположительно будет использована, можно получить для заданной первой части следующего цикла езды или для всего следующего цикла езды. Заданная первая часть будущего цикла езды может быть определена как часть будущего цикла езды от начала цикла езды до окончания временного интервала, когда профиль энергии от высоковольтной батареи 20, которая предположительно будет использоваться, в основном превышает профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована в течение временного интервала. Ожидаемая использованная энергия - это энергия, передаваемая от высоковольтной батареи 20, например, в электрическую распределительную систему 40 для приведения в действие электродвигателя 32. В другом примере энергия, накопленная в высоковольтной батарее 20, может использоваться для приведения в действие электрогенератора 30 через электрическую распределительную систему 40. Контроллер 42 и/или VSC/PCM 26 могут использоваться для определения ожидаемого профиля использования электроэнергии на основании ряда параметров или входных данных, например информации из блоков 74, 76, 78 и 80.
В блоке 72 ожидаемый профиль рекуперированной электроэнергии включает профиль энергии рекуперативного торможения, которая предположительно будет регенерирована в течение заданной части следующего цикла езды электромобиля 10. Энергия, регенерированная в ходе рекуперативного торможения электромобиля 10, связана с обработкой кинетической энергии электромобиля 10 во время торможения электромобиля 10 и накоплением энергии в высоковольтной батарее 20. Электрогенератор 30 на Фиг.2 может использоваться для преобразования кинетической энергии электромобиля 10 в электрическую энергию, которую электрическая распределительная система 40 направляет в высоковольтную батарею 20. Контроллер 42 и/или VSC/PCM 26 могут быть использованы для определения ожидаемого профиля рекуперированной электроэнергии на основании ряда параметров или входных данных, например информации из блоков 74, 76, 78 и 80.
Для определения цикла езды электромобиля 10 система может прогнозировать тип дороги, по которой, как ожидается, будет двигаться электромобиль 10, а также уровень пробок, в которые, как ожидается, попадет электромобиль 10. Эта информация затем может использоваться в рамках общей стратегии определения необходимой степени заряженности для зарядки высоковольтной батареи 20. Логическое устройство или контроллер 42 могут получать либо внутреннюю информацию или входные данные, либо с помощью сигнала, который контроллер 42 и/или VSC/PCM получают от внешних устройств, например от блока 46 управления ведущим мостом или блока 48 управления двигателем.
В блоке 74 получают информацию о будущем пункте назначения. Информация о будущем пункте назначения может быть сохранена в памяти электромобиля 10, например, будущим водителем электромобиля 10, или может быть спрогнозирована на основании расчетов предыдущей истории или моделей вождения. Например, VSC/PCM 26 может получать схему того, когда и/или где электромобиль 10, как ожидается, будет ехать, с целью прогнозирования, когда будет происходить поездка на электромобиле 10. Схема может храниться в памяти 52, и на ее основании VSC/PCM 26 может рассчитывать, какие расстояния предположительно будет проходить электромобиль 10 в одном или нескольких будущих циклах езды.
В блоке 74 информация о будущем пункте назначения может включать в себя один или несколько будущих топографических маршрутов, по которым транспортное средство может следовать для того, чтобы добраться в пункт назначения. Информация о топографическом маршруте может включать в себя информацию о том, какое количество энергии рекуперативного торможения предположительно может быть регенерировано на основании физических характеристик электромобиля 10 (например, массы электромобиля 10 и его компонентов), скорости движения потока транспорта по ожидаемому топографическому маршруту, градиента или угла уклона маршрута движения, включая углы уклона при подъеме в гору и съезде с горы, на основании информации о предыдущих поездках электромобиля 10 или иных автомобилей, которые ранее следовали по одной или нескольким дорогам, по которым электромобиль 10 может следовать для того, чтобы добраться до пункта назначения. На основании информации о будущем пункте назначения контроллер 42 и/или VSC/PCM 26 могут определять профили энергии, которая предположительно будет использована и регенерирована в течение следующего цикла езды электромобиля 10.
В блоке 76 получают информацию об использовании электроэнергии из одного или нескольких предыдущих циклов езды электромобиля 10. Информация о предыдущих циклах езды может храниться в памяти электромобиля 10. Контроллером 42 может быть интеллектуальное логическое устройство, которое может точно прогнозировать одну или несколько моделей вождения до начала цикла езды электромобиля 10 на основании информации из одного или нескольких предыдущих циклов езды и информации о будущем пункте назначения. В стратегии прогнозирования может использоваться нейросеть для получения предыдущих профилей скорости транспортного средства и других связанных с ними сигналов. Например, контроллер 42 может включать в себя нейросеть для прогнозирования типа дороги, уровней пробок на дороге и прочей информации о дорожных условиях для обучения нейросети на основании интерактивного прогнозирования типа дороги и уровня дорожных пробок в будущем цикле езды на основании информации о будущем пункте назначения.
В блоке 78 получают информацию о времени.
VSC/PCM 26 может получать информацию о времени от часов или из сигнала, введенного в VSC/PCM 26. В блоке 74 и/или блоке 76 может использоваться информация о времени для определения ожидаемого будущего пункта назначения, который может изменяться в зависимости от времени дня, дня недели, времени года и так далее. Кроме того, информация о времени может использоваться в блоках 74, 76 для выбора вариантов информации об использовании электроэнергии из одного или нескольких предыдущих циклов езды электромобиля 10. Например, информация о времени может использоваться для выбора информации об использовании электроэнергии в аналогичные периоды вождения, например когда предположительно электромобиль будет совершать поездку. В другом примере информация о времени может использоваться для определения ожидаемой интенсивности транспортного движения в будущем цикле езды, которая может изменяться в зависимости от времени дня, дня недели и т.д. Короче говоря, информация о времени может повысить точность определения профилей энергии, которая, как ожидается, будет использована и рекуперирована в течение следующего цикла езды электромобиля 10.
В блоке 80 на Фиг.4 получают информацию о текущем местоположении. VSC/PCM 26 может оценивать или получать информацию о текущем местоположении из любого подходящего источника, такого как система позиционирования (например, GPS) или иного устройства беспроводной связи, в зависимости от конфигурации контроллера 42 и/или VSC/PCM 26 в электромобиле 10.
В блоке 82 определяют общую ожидаемую энергию, необходимую для следующего цикла езды электромобиля 10. Общая необходимая ожидаемая энергия рассчитывается на основании ожидаемого профиля использования электроэнергии и ожидаемого профиля рекуперированной энергии. Например, общая необходимая ожидаемая энергия может быть равна объему общего использования энергии, спрогнозированному на следующий цикл езды, за вычетом общей рекуперированной энергии, ожидаемой на следующий цикл езды, за вычетом текущей степени заряженности высоковольтной батареи 20. VSC/PCM 26 самостоятельно или вместе с блоком 46 управления ведущим мостом и/или блоком 48 управления двигателем может использоваться для определения общей ожидаемой энергии на следующий цикл езды.
В блоке 84 принятия решения общую ожидаемую энергию, необходимую для следующего цикла езды, сравнивают с заданным уровнем энергии, необходимым для оптимизации срока службы батареи. Заданный уровень энергии, необходимый для оптимизации срока службы батареи, представляет собой уровень заряда, при котором высоковольтная батарея 20 в основном не имеет ограничения по емкости в плане рекуперации энергии рекуперативного торможения. Например, заданный уровень энергии, необходимый для оптимизации срока службы батареи, может составлять 93% (девяносто три процента). Способность рекуперировать энергию рекуперативного торможения и накапливать ее в высоковольтной батарее 20 может быть, по крайней мере частично, ограничена значением выше заданного уровня энергии, необходимой для оптимизации срока службы батареи. Блок 24 управления батареей может быть использован для определения или расчета заданного уровня энергии, необходимой для оптимизации срока службы батареи, на основании, например, типа высоковольтной батареи 20, эксплуатационных характеристик высоковольтной батареи 20 и/или информации о показателях высоковольтной батареи 20 в предыдущие периоды, например скорости зарядки высоковольтной батареи 20 при различных степенях заряженности. VSC/PCM 26 и/или блок управления батареей 24 могут получать заданный уровень энергии до каждого цикла езды электромобиля 10 или в виде заданного значения, хранящегося в памяти, в зависимости от выполнения способа и/или конфигурации системы.
В блоке 84 принятия решения на Фиг.4, контроллер 42 и/или VSC/PCM 26 могут быть использованы для сравнения общей ожидаемой энергии, необходимой для следующего цикла езды, с заданным уровнем энергии, необходимым для оптимизации срока действия батареи. Например, контроллер 42 может определять, превышает ли общая ожидаемая энергия, необходимая для следующего цикла езды, заданный уровень энергии, необходимый для оптимизации срока службы высоковольтной батареи 20. Если общая ожидаемая энергия, необходимая для следующего цикла езды, ниже или равна заданному уровню энергии, необходимому для оптимизации срока действия батареи, выполняется переход в блок 86. Однако если общая ожидаемая энергия, необходимая для следующего цикла езды, превышает заданный уровень энергии, необходимый для оптимизации срока службы батареи, выполняется переход в блок 88.
В блоке 86 необходимая степень заряженности определяют или устанавливают равной верхнему уровню заряда заданного диапазона уровней заряда, оптимизирующих срок службы высоковольтной батареи 20. Заданный диапазон уровней заряда, оптимизирующих срок службы высоковольтной батареи 20, представляет собой диапазон уровней заряда, при которых высоковольтная батарея 20 не имеет ограничений по емкости в плане зарядки или подзарядки и, таким образом, имеет относительно высокую скорость зарядки, когда высоковольтная батарея 20 заряжается от внешнего источника питания 14. Верхний уровень заряда представляет собой уровень заряда, который оптимизирует срок службы высоковольтной батареи 20 при использовании электроэнергии от внешнего источника питания 14 для зарядки высоковольтной батареи 20. Например, верхний уровень заряда может составлять 90% (девяносто процентов) заданного диапазона уровней заряда от 10% до 90%. Верхний уровень заряда, связанный с зарядкой от внешнего источника питания 14, может превышать, или быть равным, или быть ниже заданного уровня энергии, связанного с рекуперацией энергии рекуперативного торможения.
Возвращаясь к рассмотрению блока 86, блок 24 управления батареей может использоваться для определения или установления верхнего уровня заряда на основании, например, информации о наружной температуре электромобиля 10, о типе высоковольтной батареи 20, об эксплуатационных характеристиках высоковольтной батареи 20, информации об электроэнергии, подаваемой внешним источником питания 14 и/или информации о показателях высоковольтной батареи 20 в предыдущие периоды, например скорости зарядки высоковольтной батареи 20 при различных степенях заряженности. VSC/PCM 26 и/или блок 24 управления батареей могут получать значение верхнего уровня заряда до начала каждого цикла езды электромобиля 10. Например, VSC/PCM 26 и/или блок 24 управления батареей могут определять различные потенциальные скорости заряда, которые можно обеспечить для зарядки высоковольтной батареи 20 в течение следующего цикла езды на основании профилей энергии рекуперативного торможения, которая предположительно будет рекуперирована и использована в течение части будущего цикла езды. На основании потенциальных скоростей зарядки в течение следующего цикла езды VSC/PCM 26 и/или блок 24 управления батареей могут рассчитать значение верхнего уровня заряда для высоковольтной батареи 20. Например, верхний уровень заряда для высоковольтной батареи 20 можно рассчитать как величину, обратно пропорциональную средневзвешенной скорости зарядки, спрогнозированной для будущего цикла езды. И наоборот, VSC/PCM 26 и/или блок 24 управления батареей могут получать значение верхнего уровня заряда в виде заданного значения, хранящегося в памяти, в зависимости от выполнения способа и/или конфигурации системы. Более того, контроллер 42 и/или VSC/PCM 26 могут использоваться для определения или установления необходимой степени заряженности, равной верхнему уровню заряда.
В блоке 88 определяют минимальный уровень заряда, необходимый для обеспечения общей прогнозной энергии, необходимой для следующего цикла езды электромобиля 10. Минимальным уровнем заряда является уровень заряда, позволяющий высоковольтной батарее 20 подавать достаточное количество энергии в электрическую распределительную систему 40 для продвижения электромобиля 10 к будущему пункту назначения без расходования электрического заряда высоковольтной батареи 20 таким образом, что он снизится ниже заданного нижнего уровня, например, 5% (пять процентов). Контроллер 42 и/или VSC/PCM 26 могут использоваться для определения заданного нижнего уровня на основании информации о будущем пункте назначения, информации об использовании электроэнергии из одного или нескольких предыдущих циклов езды электромобиля 10, информации о времени, информации о текущем местоположении, а также прочей информации о том, на какое расстояние может проехать электромобиль 10, с определенным коэффициентом погрешности, без полного расходования заряда высоковольтной батареи 20, для обеспечения цикла езды электромобиля 10. Минимальным уровнем заряда может быть нижний уровень заряда заданного диапазона уровней заряда, полученный в блоке 86. Контроллер 42 и/или VSC/PCM 26 могут использоваться для определения минимального уровня заряда, необходимого для обеспечения общей ожидаемой энергии, необходимой на следующий цикл езды.
В блоке 90 принятия решения определяют, ожидается ли, что в первой части следующего цикла езды будет в основном происходить увеличение энергии. Когда энергия в основном увеличивается в течение определенного промежутка времени цикла езды электромобиля 10, количество использованной энергии будет выше количества энергии, рекуперированной вследствие рекуперативного торможения в течение такого определенного промежутка времени. Контроллер 42 и/или VSC/PCM 26 могут определять, прогнозируется ли, что в первую часть следующего цикла езды в основном будет происходить увеличение энергии на основании ожидаемого профиля использования электроэнергии и прогнозного профиля рекуперированной энергии. Например, контроллер 42 может определять, ожидается ли, что в первую часть следующего цикла езды в основном будет происходить увеличение энергии, если общее количество прогнозного использования электроэнергии в течение первой части следующего цикла езды превышает общее количество прогнозной рекуперированной энергии в течение первой части следующего цикла езды. Если не прогнозируется, что в первую часть следующего цикла езды в основном будет происходить увеличение энергии, то выполняется переход в блок 92. С другой стороны, если ожидается, что в первую часть следующего цикла езды в основном будет происходить увеличение энергии, то выполняется переход в блок 94.
В блоке 92 определяют необходимую степень заряженности, которая должна превышать минимальный уровень заряда, но быть на уровне ниже в случае, если рекуперативное торможение может иметь, по крайней мере частично, ограничения по емкости (например, менее 93%). Это позволит высоковольтной батарее 20 рекуперировать энергию рекуперативного торможения в течение первой части следующего цикла езды. Контроллер 42 и/или VSC/PCM 26 могут использоваться для определения или установления необходимой степени заряженности, которая должна превышать минимальный уровень заряда, но быть на уровне ниже в случае, если рекуперативное торможение может иметь, по крайней мере частично, ограничения по емкости.
В блоке 94 определяют, находится ли необходимая степень заряженности на минимальном уровне заряда или устанавливается на этом уровне. Контроллер 42 и/или VSC/PCM 26 могут использоваться для определения или установления необходимой степени заряженности на минимальном уровне заряда.
Стратегии управления или логика, показанные на Фиг.3-4, могут выполняться одним или несколькими логическими матрицами и/или микропроцессорным компьютером или контроллером. В случае ее выполнения в микропроцессорном контроллере, стратегия управления может включать в себя команды или код, обрабатываемые посредством любой из нескольких известных стратегий, такими как, управление по событиям, управление прерываниями, многозадачность, многопоточная стратегия и тому подобные. Реализованные в основном в программном или аппаратном устройстве, различные проиллюстрированные этапы или функции могут выполняться в показанной последовательности, в иной последовательности, параллельно или могут в некоторых случаях быть пропущены. Хотя это не показано прямо, специалисту в данной области очевидно, что одна или несколько показанных функций могут выполняться повторно в зависимости от конкретной реализации. Аналогичным образом, для достижения описанных характеристик и преимуществ необязательно должен соблюдаться такой порядок обработки, но он представлен для облегчения демонстрации и описания.
Логическая схема управления может выполняться в программных, аппаратных средствах или в комбинации программных и аппаратных средств на одном или нескольких контроллерах и/или электронных устройствах в зависимости от конкретного приложения. При выполнении ее в программных средствах предпочтительнее, чтобы логическая схема управления была представлена на одном или нескольких машиночитаемых носителях информации, на которых сохраняются данные, представляющие код или команды, выполняемые компьютером для управления зарядкой. Машиночитаемые носители информации могут включать в себя одно или несколько известных физических устройств, в которых используются электрические, магнитные, оптические и/или гибридные накопители для хранения выполняемых команд и связанной с ними информации о калибровке, рабочих параметрах и тому подобном.
На Фиг.5, диаграмма иллюстрирует уровни заряда высоковольтной батареи 20 и уровни использования электричества в электромобиле 10 в различные моменты времени в течение цикла езды, начиная с уровня заряда высоковольтной батареи 20 в 100%. Цикл езды на Фиг.5 имеет продолжительность приблизительно 1000 секунд. Как показано, в период от -100 до 0 секунд (т.е. до начала цикла езды) высоковольтная батарея 20 находится «на зарядке» и электроэнергия подается от внешнего источника питания 14 на высоковольтную батарею 20 для увеличения степени заряженности высоковольтной батареи 20 с уровня 80% в период от -100 секунд до 100% в нулевой момент времени.
Как показано на Фиг.5, электромобиль 10 находится «вне зарядки» в период с 0 до 350 секунд и имеет цикл езды, характеризующийся семью последовательностями ускорения и шестью последовательностями торможения, промежутком использования энергии для постоянного ускорения с 350 по 800 секунду, а затем четырьмя последовательностями торможения и тремя последовательностями ускорения в период с 800 по 1000 секунду.
На Фиг.6 показана диаграмма, демонстрирующая первую часть цикла езды, показанного на Фиг.5. Хотя показано, что первая часть цикла езды имеет продолжительность приблизительно 300 секунд, первая часть может иметь большую или меньшую продолжительность. Контроллер 42 и/или VSC/PCM 26 могут определять продолжительность первой части цикла езды электромобиля 10 на основании различной информации, например ожидаемых профилей использования электроэнергии и рекуперации энергии.
Как показано на Фиг.5-6, высоковольтная батарея 20 не рекуперирует всю энергию рекуперативного торможения в течение первых двух остановок электромобиля 10, когда абсолютная действующая сила торможения увеличивается (т.е. в период с 20 по 100 секунду). Высоковольтная батарея 20, возможно, не рекуперирует всю энергию рекуперативного торможения вследствие ограничений по заряду высоковольтной батареи 20. Высоковольтная батарея 20 имеет ограничение по заряду при степени заряженности выше 93%, как показано на Фиг.6, и, следовательно, имеет сниженную или ограниченную скорость зарядки, так что возможно увеличение степени заряженности высоковольтной батареи 20 посредством энергии рекуперативного торможения.
Как показано на Фиг.5-6, рекуперированная сила торможения приблизительно равна нулю в период с 20 по 50 секунду, и, следовательно, скорость зарядки высоковольтной батареи 20 приблизительно равна нулю. В период с 70 по 100 секунду степень заряженности высоковольтной батареи 20 снижается, как, например, когда высоковольтный батарея 20 подает электроэнергию для разгона для приведения в действие электродвигателя 32 и/или электрогенератора 30, и высоковольтная батарея 20 имеет меньшую ограниченность по заряду, чем в период с 20 по 50 секунду. Вследствие этого высоковольтная батарея 20 может рекуперировать часть энергии рекуперативного торможения или «рекуперированную силу торможения» в период с 70 по 100 секунду, но не такую величину, как энергия рекуперативного торможения в течение остановок три, четыре, пять и шесть, которые имеют место в период со 120 по 300 секунду, как показано на Фиг.5-6. Степень заряженности высоковольтной батареи 20 уменьшается во время остановок три, четыре, пять и шесть до уровня, при котором высоковольтная батарея 20 не имеет ограничений по заряду. Когда высоковольтная батарея 20 не имеет ограничения по заряду, высоковольтная батарея 20 обладает в полной мере способностью накапливать энергию заряда и может рекуперировать энергию рекуперативного торможения с максимальной скоростью зарядки. Таким образом, как показано во время остановок три, четыре, пять и шесть, мощность рекуперированного торможения соответствует действующей силе торможения, так что высоковольтная батарея 20 может рекуперировать в основном всю потенциальную энергию рекуперативного торможения, действующего во время цикла езды.
На Фиг.7 представлена диаграмма, аналогичная Фиг.5, но иллюстрирующая состояние высоковольтной батареи 20 с уровнем заряда 90%, до начала цикла езды согласно одному варианту. Аналогично Фиг.5, цикл езды на Фиг.7 имеет продолжительность приблизительно 1000 секунд с промежутком времени с -100 по 0 секунду, который имеет место, когда высоковольтная батарея 20 находится «на зарядке» электроэнергией, поступающей от внешнего источника питания 14 на высоковольтную батарею 20 для увеличения степени заряженности высоковольтной батареи 20. В отличие от Фиг.5, где степень заряженности высоковольтной батареи 20 увеличивается с 80% до 100%, на диаграмме Фиг.7 показано, что степень заряженности высоковольтной батареи 20 увеличивается с 70% до 90%.
На Фиг.8 показана диаграмма, иллюстрирующая первую часть диаграммы на Фиг.7, на которой показано, что высоковольтная батарея 20 рекуперирует в существенной степени всю энергию рекуперативного торможения во время первых двух остановок электромобиля 10 без ограничения зарядки высоковольтной батареи 20, как показано на Фиг.5-6.
Как показано на Фиг.7-8, электромобиль 10 находится «вне зарядки» в период с 0 по 350 секунду и имеет цикл езды, характеризующийся семью последовательностями ускорения и шестью последовательностями торможения, промежутком использования энергии постоянного ускорения с 350 по 800 секунду, а затем четырьмя последовательностями торможения и тремя последовательностями ускорения в период с 800 по 1000 секунду. Тем не менее, высоковольтная батарея 20 не находится в состоянии заряженности на полную емкость в начале цикла езды, что позволяет высоковольтной батарее 20 рекуперировать энергию рекуперативного торможения с максимальной скоростью зарядки на каждой из остановок в течение цикла езды, показанного на Фиг.7. Вследствие этого высоковольтная батарея 20 не имеет ограничений по заряду. Таким образом, как показано во время остановок с первой по шестую, мощность рекуперированного торможения соответствует действующей силе торможения, и высоковольтная батарея 20 может рекуперировать в значительной степени всю потенциальную энергию рекуперативного торможения. В результате этого полная энергия, использованная во время остановок с первой по шестую, может составлять приблизительно 0,5 кВт-ч, когда практически вся потенциальная энергия рекуперативного торможения рекуперируется, как показано на Фиг.8 при 300 сек. По сравнению с этим, полная энергия, использованная во время остановок с первой по шестую, может составлять приблизительно 0,6 кВт-ч, когда потенциальная энергия рекуперативного торможения не может быть полностью рекуперирована, как показано на Фиг.6 при 300 сек. Соответственно, полная или вся энергия, использованная для всего цикла езды, может составлять приблизительно 2,8 кВт-ч, когда практически вся потенциальная энергия рекуперативного торможения рекуперируется, как показано на Фиг.7 при 1000 сек, и приблизительно 2,9 кВт-ч, когда потенциальная энергия рекуперативного торможения не может быть полностью рекуперирована, как показано на Фиг.6 при 1000 сек. Этот результат пониженного использования электроэнергии в определенном цикле езды подчеркивает одно из потенциальных преимуществ отказа от зарядки до уровней степени заряженности в момент нахождения «на зарядке», что может ограничить скорость зарядки на основании рекуперативного торможения в первой части цикла езды.
Описанные выше примеры не охватывают все возможные варианты осуществления изобретения. Данное описание имеет скорее иллюстративный, чем ограничивающий характер. При этом без выхода за рамки сущности и объема изобретения могут быть произведены различные модификации описанных вариантов. Кроме того, различные варианты осуществления изобретения могут быть объединены в новые варианты воплощения изобретения.

Использование: в области электротехники. Технический результат - определение необходимой степени заряженности тяговой аккумуляторной батареи до начала цикла езды для обеспечения возможности рекуперирования энергии торможения во время цикла езды. Зарядка батареи до необходимой степени заряженности происходит до начала цикла езды транспортного средства. Необходимая степень заряженности определяется на основании профиля энергии рекуперативного торможения, которая, как ожидается, будет рекуперирована, и профиля энергии, которая, как ожидается, будет использована от батареи в течение части будущего цикла езды. 3 н. и 17 з.п. ф-лы, 8 ил.
1. Способ зарядки батареи в транспортном средстве до начала цикла езды, содержащий:
управление посредством контроллера зарядкой батареи от источника питания, внешнего для транспортного средства, на основании профиля энергии рекуперативного торможения, которая предположительно будет рекуперирована во время части будущего цикла езды транспортного средства, и профиля энергии, которая предположительно будет использована от батареи во время указанной части будущего цикла езды.
2. Способ зарядки батареи в транспортном средстве с использованием электрической энергии от источника питания, внешнего для транспортного средства, содержащий:
управление посредством контроллера до цикла езды зарядкой батареи до необходимой степени заряженности на основании профиля энергии рекуперативного торможения, которая предположительно будет рекуперирована во время части будущего цикла езды транспортного средства, и профиля энергии, которая предположительно будет использована от батареи во время указанной части будущего цикла езды.
3. Способ по п. 2, причем необходимая степень заряженности дополнительно основана на количестве энергии рекуперативного торможения, которая предположительно будет рекуперирована в первоначальной части будущего цикла езды.
4. Способ по п. 3, причем первоначальная часть будущего цикла езды является частью будущего цикла езды от начала цикла езды до временного интервала, когда профиль энергии, которая предположительно будет использоваться от батареи, в существенной степени превышает профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована в течение данного временного интервала.
5. Способ по п. 3, дополнительно включающий в себя управление посредством контроллера скоростью зарядки для зарядки батареи во время первоначальной части будущего цикла езды на основании энергии рекуперативного торможения, которая предположительно будет рекуперирована во время первоначальной части, и причем необходимая степень заряженности дополнительно основана на скорости зарядки.
6. Способ по п. 5, причем скорость зарядки для зарядки батареи во время первоначальной части будущего цикла езды дополнительно основана на количестве энергии батареи, которая требуется для выполнения будущего цикла езды.
7. Способ по п. 2, дополнительно включающий в себя управление посредством контроллера скоростью зарядки для зарядки батареи на основании энергии рекуперативного торможения, которая предположительно будет рекуперирована, и причем необходимая степень заряженности дополнительно основана на скорости зарядки.
8. Способ по п. 7, причем необходимая степень заряженности обратно пропорциональна скорости зарядки.
9. Способ по п. 2, причем необходимая степень заряженности является верхним пределом заданного рабочего диапазона степени заряженности, когда верхний предел предусматривает по меньшей мере количество энергии батареи, необходимое для выполнения будущего цикла езды.
10. Способ по п. 9, причем необходимая степени заряженности определяет максимальное количество времени, в течение которого батарея работает в заданном рабочем диапазоне степени заряженности в течение будущего цикла езды.
11. Способ по п. 10, причем заданный диапазон степени заряженности составляет от десяти процентов (10%) до девяноста процентов (90%) от максимальной степени заряженности батареи.
12. Способ по п. 2, причем необходимая степень заряженности определяет максимальное количество энергии рекуперативного торможения, которую транспортное средство получает во время будущего цикла езды.
13. Способ по п. 2, дополнительно включающий в себя обработку информации, указывающей на ожидаемый путь пробега транспортного средства во время цикла езды, и причем профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована, и профиль энергии, которая предположительно будет использована, основаны на ожидаемом пути пробега.
14. Способ по п. 13, причем информация, указывающая на ожидаемый путь пробега, включает в себя информацию, указывающую на длины и градусы наклона для соответствующих участков ожидаемого пути пробега, и причем профиль энергии рекуперативного торможения, которая предположительно будет рекуперирована, и профиль энергии, которая предположительно будет использована, основаны на упомянутых длинах и градусах наклона.
15. Способ по п. 13, причем информация, указывающая на ожидаемый путь пробега транспортного средства, основана на одном или более вводах пользователя, включающих в себя информацию, указывающую на планируемый пункт назначения транспортного средства.
16. Способ по п. 13, причем информация, указывающая на ожидаемый путь пробега транспортного средства, основана на количествах энергии рекуперативного торможения, рекуперированной во время предыдущих циклов езды транспортного средства, возникших на по меньшей мере части ожидаемого пути пробега.
17. Способ по п. 16, причем информация, указывающая на ожидаемый путь пробега транспортного средства, основана на времени суток, когда были рекуперированы упомянутые количества энергии рекуперативного торможения.
18. Способ по п. 16, причем информация, указывающая на ожидаемый путь пробега транспортного средства, основана на дне недели, когда были рекуперированы упомянутые количества энергии рекуперативного торможения.
19. Система зарядки батареи в транспортном средстве до начала цикла езды, содержащая:
по меньшей мере одно логическое устройство, выполненное с возможностью заряжать аккумуляторную батарею в транспортном средстве до начала цикла езды транспортного средства с использованием электроэнергии от источника питания, внешнего для транспортного средства, до необходимой степени заряженности, основанной на профиле энергии рекуперативного торможения, которая предположительно будет рекуперирована во время части будущего цикла езды транспортного средства, и профиля энергии, которая предположительно будет использована от батареи во время указанной части будущего цикла езды.
20. Система по п. 19, причем логическое устройство представляет собой контроллер, включающий в себя процессор, выполненный с возможностью выполнения программных команд, компьютерную память, выполненную с возможностью хранения программных команд, к которой может обращаться процессор, и набор программных команд, хранящихся в памяти, для зарядки батареи до необходимой степени заряженности с использованием электроэнергии от внешнего источника питания.
| US 2009319110A1, 24.12.2009 | |||
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО, ИСПОЛЬЗУЮЩЕЕ СИСТЕМУ ЭЛЕКТРОПИТАНИЯ, И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ | 2007 |
|
RU2397592C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДОМ АККУМУЛЯТОРНОЙ БАТАРЕИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025862C1 |
| US 2008211230A1, 04.09.2008. | |||

