УРОВЕНЬ ТЕХНИКИ
[0001] Датчики, например, сейсмические датчики, могут быть размещены и извлечены на месте в разведке нефти и газа. Полевой работник может передвигаться и переносить сейсмические датчики в различные места в поле для подходящего положения датчиков для получения сейсмической информации и извлечения датчиков при выполнении. Полевой работник может перемещать датчики, проходя большие расстояния в различных местах в поле при непосредственном удержании датчиков и/или ящика датчиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0002] Неограничивающие примеры описаны в следующем далее описании, читаются со ссылкой на приложенные к нему фигуры и не ограничивают объем охраны формулы изобретения. Размеры компонентов и признаков, проиллюстрированных на фигурах, выбраны главным образом для удобства и ясности представления и необязательно выполнены в масштабе.
На чертежах:
[0003] Фиг. 1 представляет собой блок-схему, иллюстрирующую подвесное устройство согласно примеру.
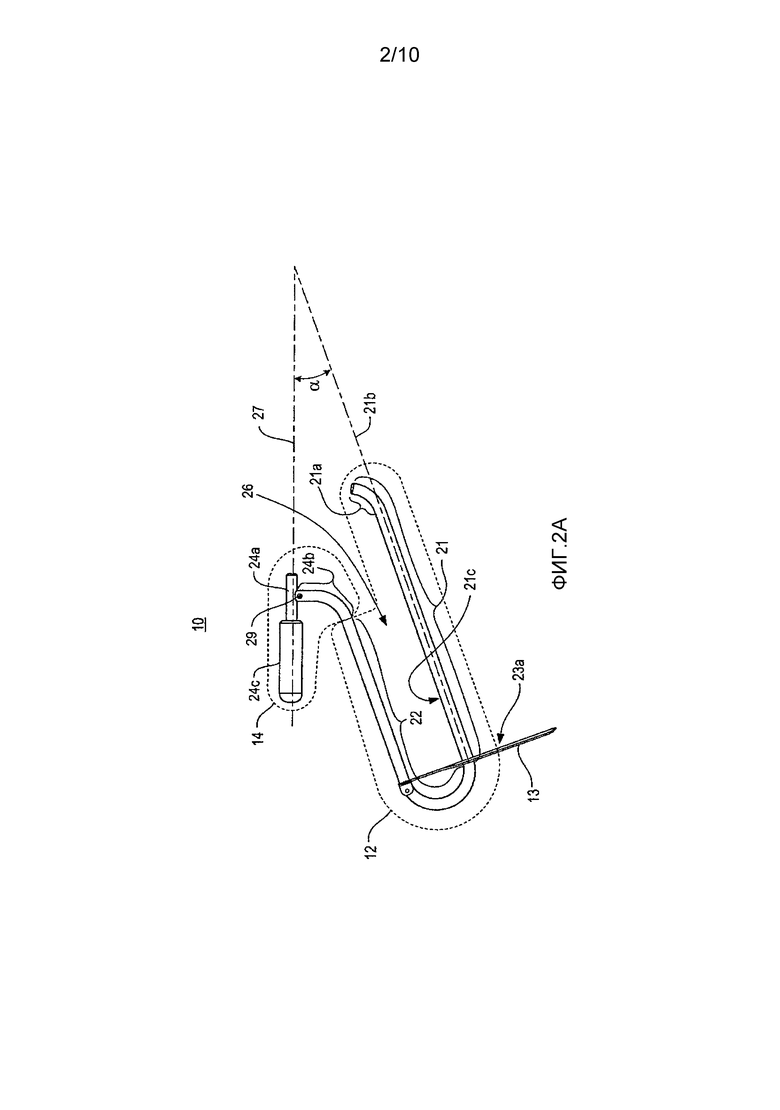
[0004] Фиг. 2A представляет собой вид сбоку, иллюстрирующий подвесное устройство на Фиг. 1 согласно примеру.
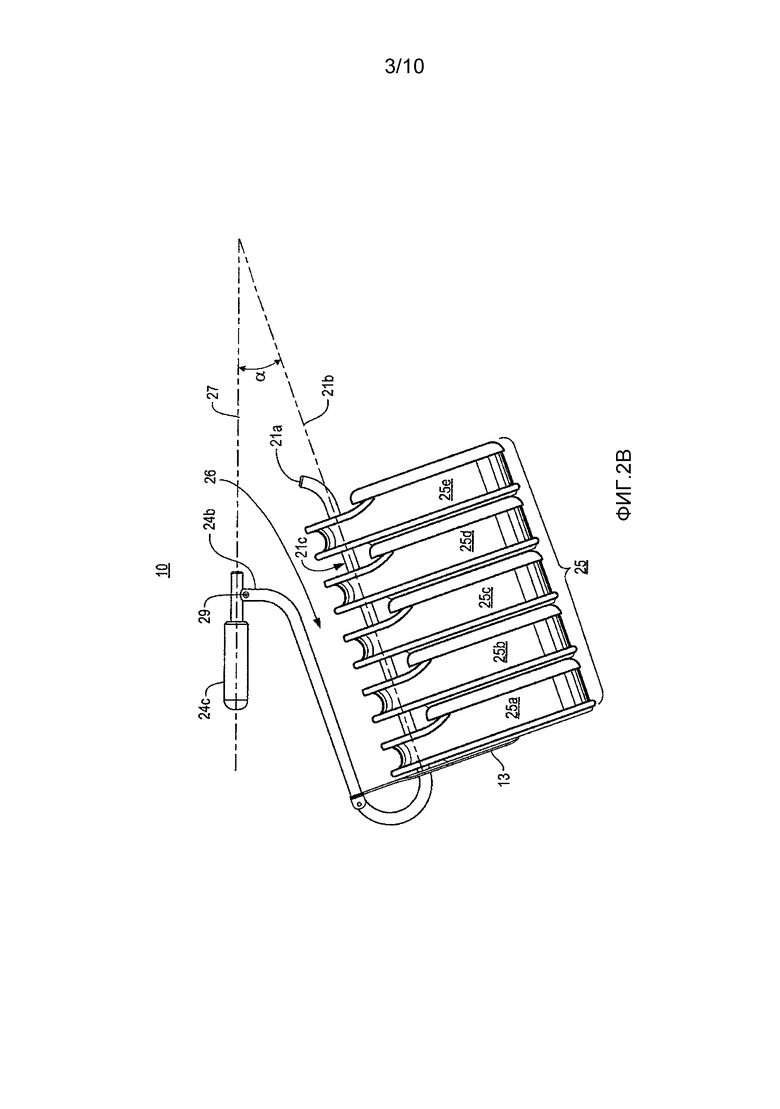
[0005] Фиг. 2B представляет собой вид сбоку, иллюстрирующий подвесное устройство на Фиг. 2A с соответственными датчиками, принимаемыми на нем согласно примеру.
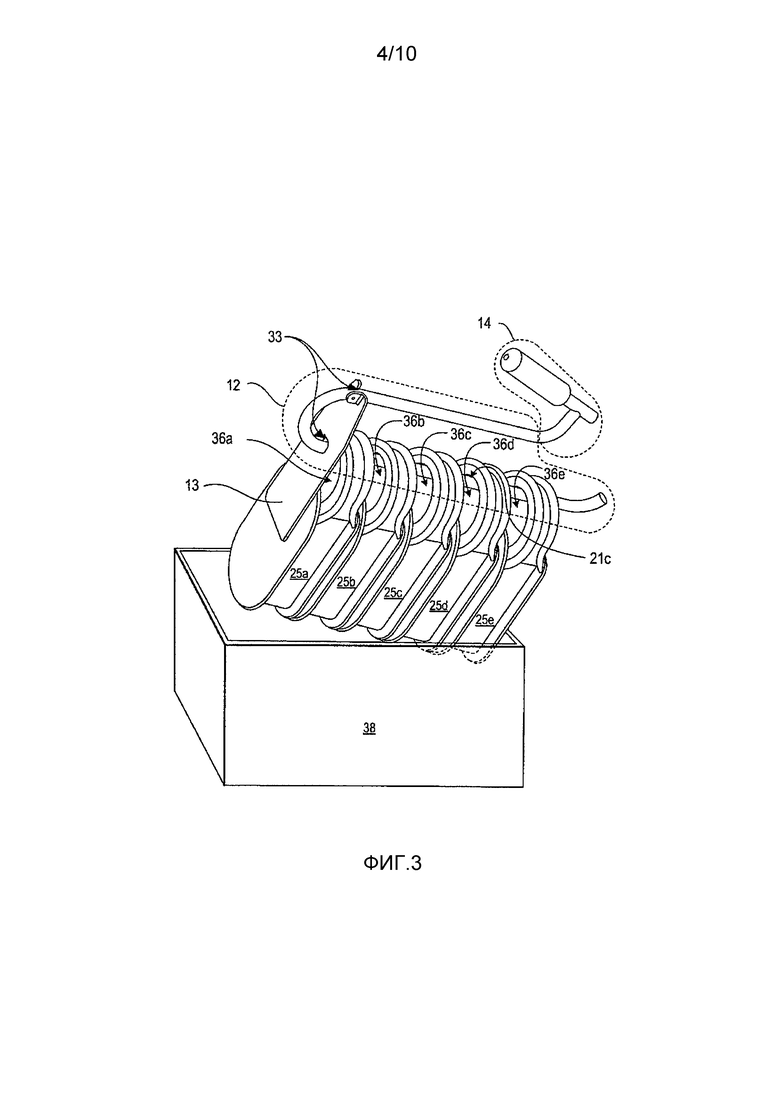
[0006] Фиг. 3 представляет собой вид в перспективе, иллюстрирующий подвесное устройство на Фиг. 2B в неустановленном состоянии для передачи соответственных датчиков контейнеру согласно примеру.
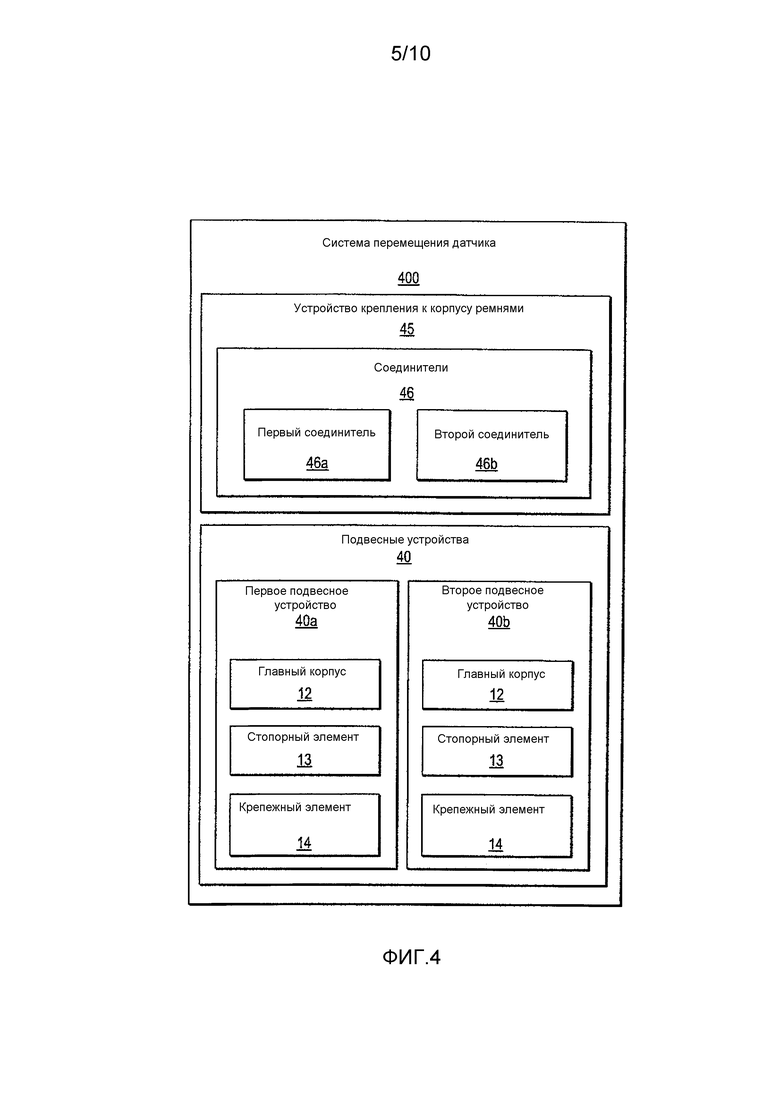
[0007] Фиг. 4 представляет собой блок-схему, иллюстрирующую систему перемещения датчика согласно примеру.
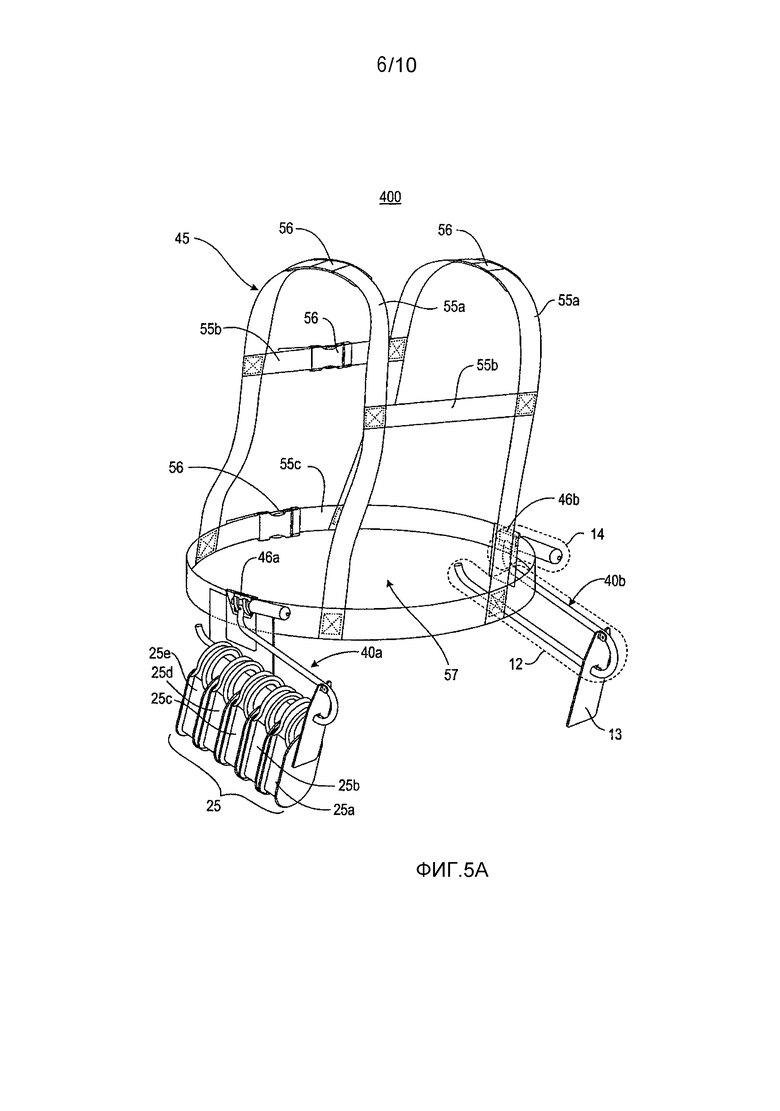
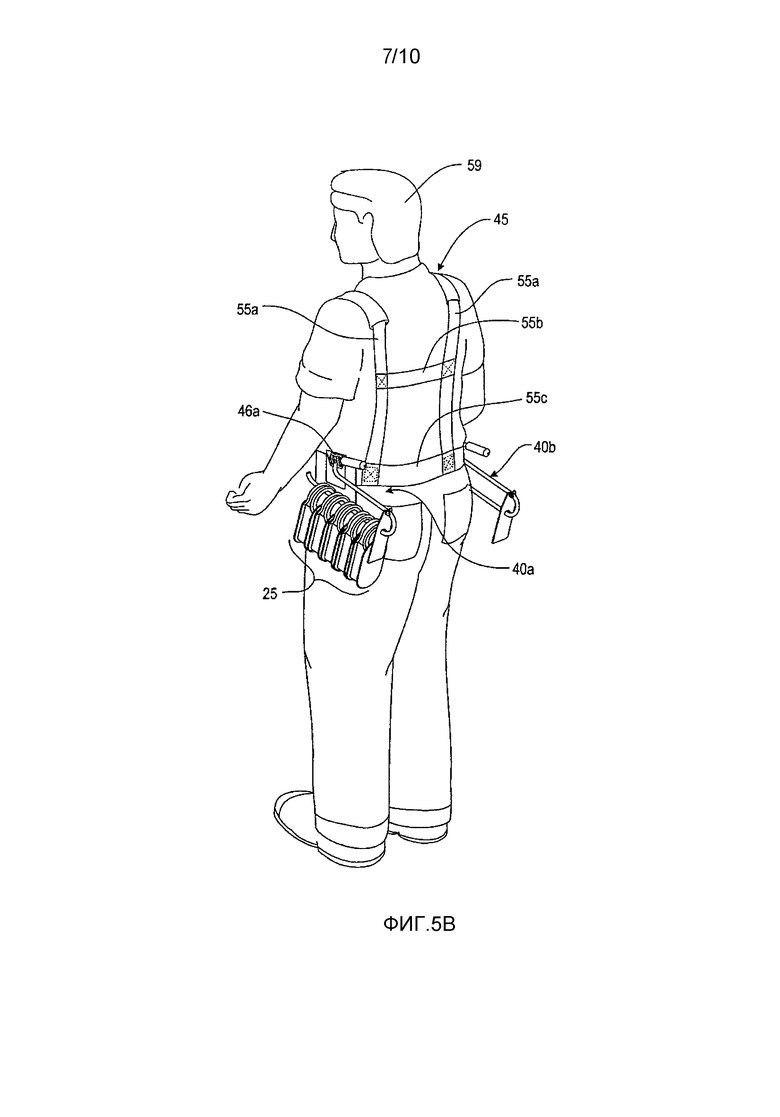
[0008] Фиг. 5A и 5B представляют собой виды в перспективе, иллюстрирующие систему перемещения датчика на Фиг. 4 согласно примерам.
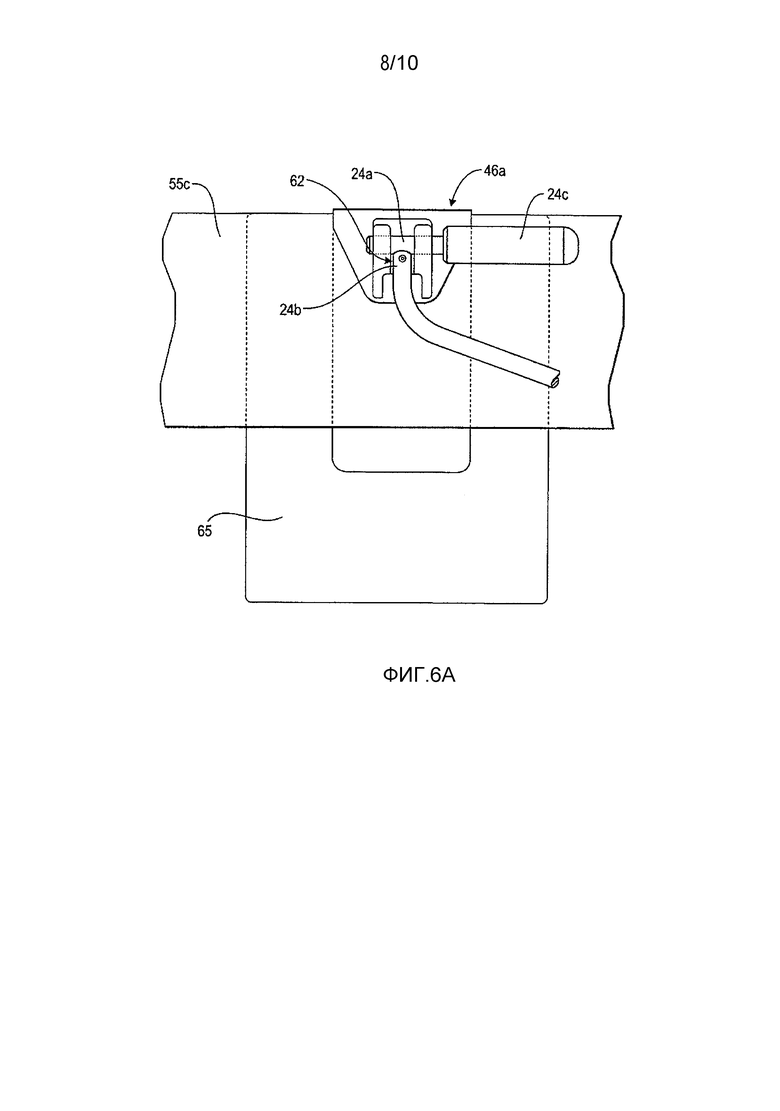
[0009] Фиг. 6A представляет собой вид спереди соответственного соединителя, прикрепленного к поясному ремню устройства крепления к корпусу ремнями системы перемещения датчика на Фиг. 4 согласно примеру.
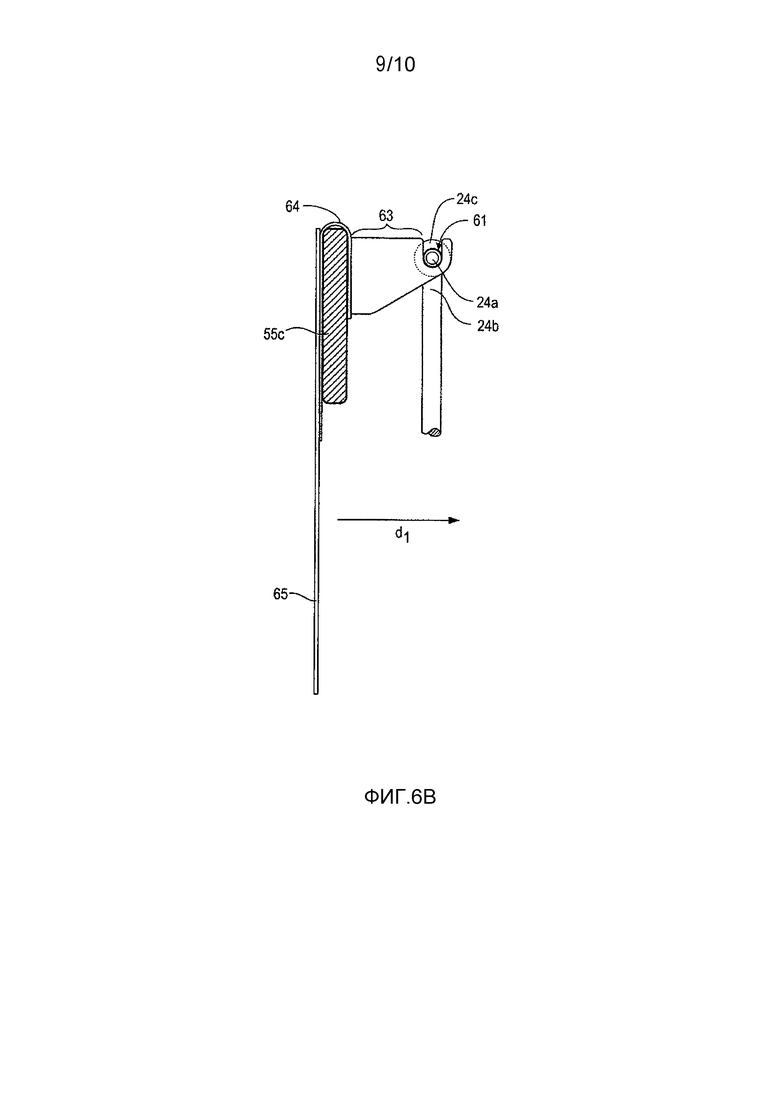
[0010] Фиг. 6B представляет собой вид сбоку соответственного соединителя на Фиг. 6A согласно примеру.
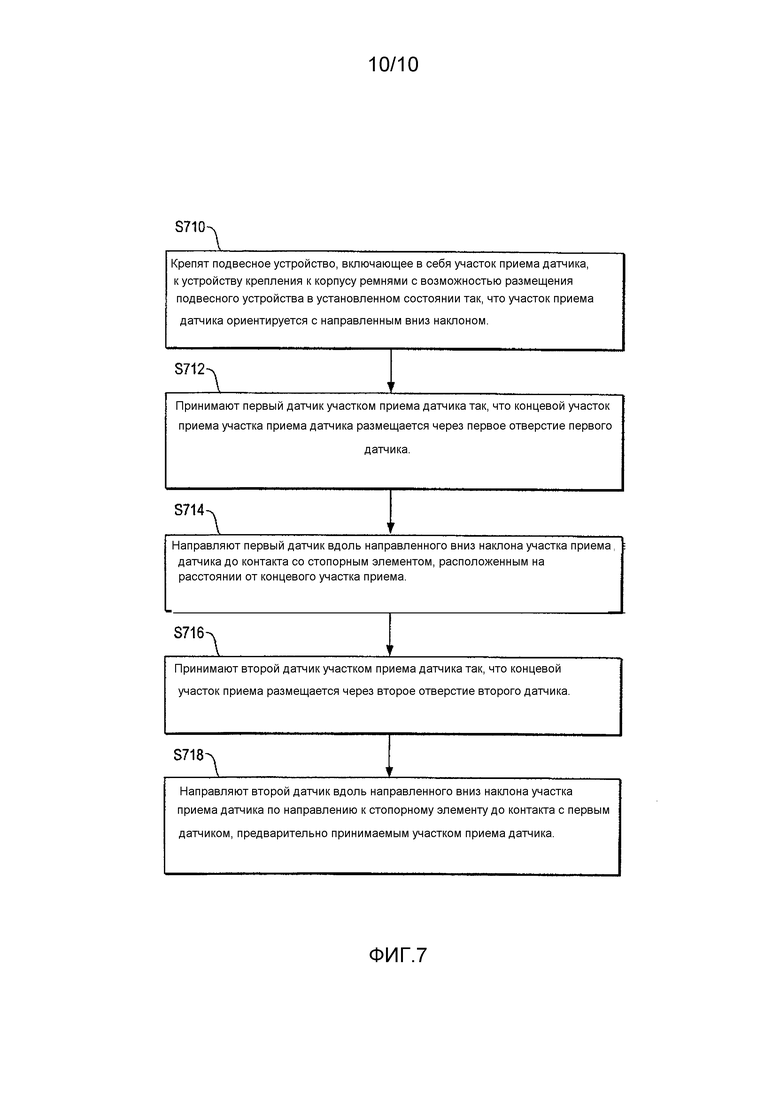
[0011] Фиг. 7 представляет собой способ перемещения датчиков согласно примеру.
ПОДРОБНОЕ ОПИСАНИЕ
[0012] Датчики, например сейсмические датчики, могут использоваться для получения сейсмической информации. Сейсмические датчики, например, могут использоваться в виде узлов датчиков в беспроводной сети сейсмических датчиков в разведке нефти и газа. Сейсмические датчики могут быть размещены и в дальнейшем извлечены в различных местах в поле для получения сейсмической информации, например, определения разрывов в звуковых волнах, отражающихся от потенциальных нефтяных и/или газовых пластовых резервуаров. Размещение и извлечение датчиков может требовать полевого работника, например, размотчика, для перемещения датчиков в поле на большие расстояния трудным и эргономически неудобным образом. Например, полевой работник может непосредственно удерживать датчики и/или ящик датчиков, что вызывает неравномерную нагрузку и/или необходимость постоянного использования руки работника. Таким образом, иногда полевой работник может быть вынужден класть датчики и/или ящик датчиков на землю для освобождения его или ее рук для других действий, которые могут требовать использование двух рук, например, размещение датчиков и т.п. Дополнительно при передвижении в различные места в течение многих часов полевой работник может испытывать чрезмерное напряжение. Таким образом, эффективность, скорость и комфорт при перемещении датчиков для размещения и извлечения в поле полевым работником могут быть снижены.
[0013] В примерах подвесное устройство может быть использовано с устройством крепления к корпусу ремнями. Подвесное устройство может включать в себя главный корпус, стопорный элемент и крепежный элемент. Главный корпус может принимать датчики. Стопорный элемент может быть соединен с главным корпусом с возможностью размещения датчиков на главном корпусе. Крепежный элемент может быть соединен с главным корпусом. Дополнительно крепежный элемент может крепиться с возможностью удаления к устройству крепления к корпусу ремнями в установленном состоянии и с возможностью ориентировать главный корпус для направления датчиков по направлению к стопорному элементу в установленном состоянии. Установленное состояние представляет собой состояние, в котором подвесное устройство прикреплено к устройству крепления к корпусу ремнями таким образом, чтобы ориентировать главный корпус для направления датчиков по направлению к стопорному элементу. Неустановленное состояние представляет собой состояние, в котором подвесное устройство не прикреплено к устройству крепления к корпусу ремнями. Пользователь может размещать устройство крепления к корпусу ремнями на его или ее корпусе и размещать подвесное устройство для приема датчиков в установленном состоянии на устройстве крепления к корпусу ремнями. Таким образом, полевой работник может перемещать датчики, принимаемые на подвесном устройстве, на большие расстояния более равномерным образом без необходимости постоянного использования его или ее рук и без чрезмерного напряжения. Также полевой работник может перемещать датчики при наличии двух свободных рук для выполнения других действий, например, размещения датчиков и т.п. Соответственно эффективность, скорость и комфорт при перемещении датчиков для размещения и извлечения в поле могут быть улучшены.
[0014] Фиг. 1 представляет собой блок-схему, иллюстрирующую подвесное устройство согласно примеру. Подвесное устройство может быть пригодным к использованию с устройством крепления к корпусу ремнями. На Фиг. 1 в некоторых примерах подвесное устройство 10 может включать в себя главный корпус 12, стопорный элемент 13 и крепежный элемент 14. Главный корпус 12 может принимать датчики. Стопорный элемент 13 может быть соединен с главным корпусом 12 с возможностью размещения датчиков на главном корпусе 12. Дополнительно крепежный элемент 14 может быть соединен с главным корпусом 12. Крепежный элемент 14 также может крепиться с возможностью удаления к устройству крепления к корпусу ремнями в установленном состоянии и ориентировать главный корпус 12 для направления датчиков по направлению к стопорному элементу 13 в установленном состоянии, в некоторых примерах главный корпус 12 и крепежный элемент 14 и/или их участки могут быть соединены друг с другом посредством образования одного цельного элемента, например, вытянутого стержня. Альтернативно в некоторых примерах главный корпус 12 и крепежный элемент 14 и/или их участки могут быть соединены друг с другом посредством крепления предварительно отдельных элементов друг к другу.
[0015] Фиг. 2A представляет собой вид сбоку, иллюстрирующий подвесное устройство на Фиг. 1 согласно примеру. Фиг. 2B представляет собой вид сбоку, иллюстрирующий подвесное устройство на Фиг. 1 с соответственными датчиками, принимаемыми на нем согласно примеру. Фиг. 3 представляет собой вид в перспективе, иллюстрирующий подвесное устройство на Фиг. 2B в неустановленном состоянии для передачи соответственных датчиков контейнеру согласно примеру. На Фиг. 2A и 2B в некоторых примерах подвесное устройство 10 может включать в себя главный корпус 12, стопорный элемент 13 и крепежный элемент 14, которые ранее раскрыты в отношении Фиг. 1. Главный корпус 12 может принимать датчики 25a, 25b, 25c, 25d и 25e (совместно 25), которые проиллюстрированы на Фиг. 2B. В некоторых примерах датчики 25 могут представлять собой сейсмические датчики, используемые в виде узла датчиков в беспроводной сети сейсмических датчиков в разведке нефти и газа. Датчики 25 могут включать в себя антенны и кабели (не проиллюстрированы).
[0016] На Фиг. 2A и 2B в некоторых примерах главный корпус 12 также может включать в себя участок 21 приема датчика и промежуточный участок 22. Участок 21 приема датчика может продолжаться через отверстия 36a, 36b, 36c, 36d и 36e (совместно 36) (Фиг. 3) датчиков 25 с возможностью приема датчиков 25. Участок 21 приема датчика также может включать в себя концевой участок 21a приема, первую продольную ось 21b и направленный вниз наклон 21c. Концевой участок 21a приема может представлять собой начальную часть участка 21 приема датчика с возможностью продолжения через отверстия 36 (Фиг. 3) датчиков 25. В некоторых примерах концевой участок 21a приема может быть изогнутым, а первая продольная ось 21b может продолжаться через существенный участок участка 21 приема датчика. Направленный вниз наклон 21с может наклоняться от концевого участка 21a приема по направлению к стопорному элементу 13 в установленном состоянии. Таким образом, направленный вниз наклон 21c может направлять датчики 25, принимаемые участком 21 приема датчика, по направлению к стопорному элементу 13 в установленном состоянии. Например, сила веса соответственных датчиков 25 может вызывать скольжение датчиков 25 вниз направленного вниз наклона 21с участка 21 приема датчика.
[0017] На Фиг. 2A и 2B в некоторых примерах промежуточный участок 22 может быть соединен с участком 21 приема датчика и крепежным элементом 14. В некоторых примерах участок 21 приема датчика и промежуточный участок 22 могут быть выполнены в форме участка вытянутого стержня. Например, участок 21 приема датчика и промежуточный участок 22 могут быть образованы из одного цельного стержня. Промежуточный участок 22 и участок 21 приема датчика могут образовывать область 26 зазора датчика для приема датчиков 25 главным корпусом 12. То есть область 26 зазора датчика может обеспечивать зазор для направления участка соответственных датчиков 25 вдоль участка 21 приема датчика.
[0018] На Фиг. 2A и 2B в некоторых примерах стопорный элемент 13 может быть соединен с главным корпусом 12 с возможностью размещения датчиков на главном корпусе 25. Например, стопорный элемент 13 может быть соединен с промежуточным участком 22 и участком 21 приема датчика. Стопорный элемент 13 может размещать датчики 25 посредством контакта и/или остановки первоначально принимаемого датчика 25a в соответственном положении на участке 21 приема датчика и в дальнейшем посредством имеющегося первоначально принимаемого датчика 25a, контактирующего и/или останавливающего позже принимаемый датчик 25b в соответственном положении на участке 21 приема датчика. Таким образом, датчики 25 могут быть размещены на подвесном устройстве 10 в виде конструкции типа укладки, в которой позже принимаемый датчик 25b может контактировать и/или размещаться посредством смежного предварительно принимаемого датчика 25a. Эта конструкция типа укладки может включать в себя множество датчиков 25, например, пять датчиков 25a, 25b, 25c, 25d и 25e. В некоторых примерах стопорный элемент 13 может включать в себя по существу плоскую поверхность 23a и множество отверстий 33 (Фиг. 3) для приема каждого из участка 21 приема датчика и промежуточного участка 22 соответственно. В некоторых примерах стопорный элемент 13 может быть по существу перпендикулярным участку 21 приема датчика и промежуточному участку 22.
[0019] На Фиг. 2A и 2B в некоторых примерах крепежный элемент 14 может быть соединен с главным корпусом 12. Крепежный элемент 14 может крепиться с возможностью удаления к устройству крепления к корпусу ремнями в установленном состоянии и ориентировать главный корпус 12 для направления датчиков 25 по направлению к стопорному элементу 13 в установленном состоянии. Например, в установленном состоянии главный корпус 12 может включать в себя участок 21 приема датчика, имеющий направленный вниз наклон 21c, с возможностью наклона от его концевого участка 21a приема по направлению к стопорному элементу 13 для направления датчиков 25, принимаемых участком 21 приема датчика, по направлению к стопорному элементу 13. В некоторых примерах крепежный элемент 14 может включать в себя первый крепежный участок 24a, второй крепежный участок 24b и рукоятку 24c.
[0020] В некоторых примерах первый крепежный участок 24a может включать в себя вторую продольную ось 27, продолжающуюся через него. В некоторых примерах вторая продольная ось 27 первого крепежного участка 24a и первая продольная ось 21b участка 21 приема датчика могут образовывать угол между ними. В некоторых примерах угол может находиться в диапазоне от пяти градусов до сорока пять градусов. Второй крепежный участок 24b может быть расположен между и соединен с участком 21 приема датчика и первым крепежным участком 24a. Крепежный элемент 14 может включать в себя крепежное средство 29, например, винт, палец, заклепку и т.п. В некоторых примерах крепежное средство 29 может соединять первый крепежный участок 24a со вторым крепежным участком 24b. Второй крепежный участок 24b и первый крепежный участок 24a могут образовывать угол между ними. В некоторых примерах второй крепежный участок 24b может быть изогнутым с возможностью ориентации участка 21 приема датчика для направления датчиков 25 по направлению к стопорному элементу 13 в установленном состоянии.
[0021] Рукоятка 24c может быть соединена с первым крепежным участком 24a и удерживаться пользователем в неустановленном состоянии с возможностью размещения подвесного устройства 10 в установленном состоянии и неустановленном состоянии. Рукоятка 24c также может удерживаться пользователем в неустановленном состоянии с возможностью перемещения датчиков 25, принимаемых подвесным устройством 10, в различные места. Например, пользователь может удерживать рукоятку 24c подвесного устройства 10 в неустановленном состоянии для перемещения датчиков 25 на подвесном устройстве 10 к контейнеру 38 для дальнейшей передачи датчиков 25 от подвесного устройства 10 контейнеру 38 для хранения, перевозки и т.п. В некоторых примерах в неустановленном состоянии подвесное устройство 10 может ориентироваться пользователем для обеспечения наклона направленного вниз наклона 21c участка 21 приема датчика от стопорного элемента 13 по направлению к участку 21 приема датчика для направления датчиков 25 от подвесного устройства 10 и к контейнеру 38, как проиллюстрировано на Фиг. 3. Таким образом, датчики 25 могут передаваться от подвесного устройства 10 и в контейнер 38 в виде группы. Альтернативно датчики 25 могут передаваться из контейнера 38 и на подвесное устройство 10 в виде группы, например, для перемещения и размещения в поле.
[0022] Фиг. 4 представляет собой блок-схему, иллюстрирующую систему перемещения датчика согласно примеру. На Фиг. 4 в некоторых примерах система 400 перемещения датчика может включать в себя устройство 45 крепления к корпусу ремнями и множество подвесных устройств 40. Устройство 45 крепления к корпусу ремнями может включать в себя множество соединителей 46 и принимать пользователя. Например, соединители 46 могут включать в себя первый соединитель 46a и второй соединитель 46b. Каждое из подвесных устройств 40 может включать в себя главный корпус 12, стопорный элемент 13 и крепежный элемент 14, которые ранее раскрыты в отношении подвесного устройства 10 на Фиг. 1-3. Например, множество подвесных устройств 40 может включать в себя первое подвесное устройство 40a и второе подвесное устройство 40b. Главный корпус 12 может принимать множество датчиков. Стопорный элемент 13 может быть соединен с главным корпусом 12 с возможностью размещения датчиков на главном корпусе 12. Крепежный элемент 14 может быть соединен с главным корпусом 12 с возможностью крепления с возможностью удаления к соответственному соединителю 46a и 46b в установленном состоянии. Крепежный элемент 14 также может ориентировать главный корпус 12 с возможностью направления датчиков по направлению к стопорному элементу 13 в установленном состоянии.
[0023] Фиг. 5A и 5B представляют собой виды в перспективе, иллюстрирующие систему перемещения датчика на Фиг. 4 согласно примерам. Фиг. 5B иллюстрирует систему перемещения датчика на Фиг. 5A, размещенную на пользователе. На Фиг. 4-5B в некоторых примерах система 400 перемещения датчика может включать в себя множество подвесных устройств 40 и устройство 45 крепления к корпусу ремнями, которые ранее раскрыты в отношении Фиг. 4. Каждое из подвесных устройств 40 может включать в себя главный корпус 12, стопорный элемент 13 и крепежный элемент 14, которые ранее раскрыты в отношении подвесного устройства 10 на Фиг. 1-3. Подвесные устройства 40 могут включать в себя первое подвесное устройство 40a и второе подвесное устройство 40b. Первое подвесное устройство 40a может быть размещено на устройстве 45 крепления к корпусу ремнями с возможностью размещения с одной стороны пользователя 59, а второе подвесное устройство 40b может быть размещено на устройстве 45 крепления к корпусу ремнями с возможностью размещения с другой стороны пользователя 59. В некоторых примерах каждое из подвесных устройств 40, размещенное на противоположных сторонах пользователя 59, может распределять вес датчиков 25, расположенных на нем, и обеспечивать более равномерную нагрузку.
[0024] На Фиг. 4-5B в некоторых примерах устройство 45 крепления к корпусу ремнями может включать в себя множество соединителей 46, множество ремней 55a, 55b, и 55c (совместно 55) и множество элементов 56 регулировки ремней. Множество ремней 55 могут быть соединены друг с другом для образования области 57 корпуса с возможностью приема пользователя 59. Например, пользователь 59 может размещать его или ее корпус в области 57 корпуса устройства 45 крепления к корпусу ремнями. Ремни 55 могут включать в себя плечевые ремни 55a, промежуточные ремни 55b и поясной ремень 55c, окружающий пользователя. Плечевые ремни 55a могут быть размещены на плечах пользователя 59. Промежуточные ремни 55b могут соединяться с и продолжаться между плечевыми ремнями 55a. Поясной ремень 55c может быть соединен с плечевыми ремнями 55a и размещен вокруг талии пользователя 59.
[0025] Элементы 56 регулировки ремней могут регулировать длину соответственных ремней 55. Например, ремни 55 могут регулироваться для соответствия пользователю 59 и/или распределения нагрузки, осуществляемой системой 400 перемещения датчика в отношении пользователя 59. Соединители 46 могут принимать подвесные устройства 40 с возможностью приема датчиков 25 соответственно. Например, первый соединитель 46a может принимать с возможностью удаления первое подвесное устройство 40a, а второй соединитель 46b может принимать с возможностью удаления второе подвесное устройство 40b. В некоторых примерах соединители 46 могут быть неразъемно прикреплены к устройству 45 крепления к корпусу ремнями, например, к поясному ремню 55c. Альтернативно в некоторых примерах соединители 46 могут быть прикреплены с возможностью удаления к устройству 45 крепления к корпусу ремнями, например, к поясному ремню 55c.
[0026] Фиг. 6A представляет собой вид спереди соответственного соединителя, прикрепленного к поясному ремню устройства крепления к корпусу ремнями системы перемещения датчика на Фиг. 4 согласно примеру. Фиг. 6B представляет собой вид сбоку соответственного соединителя на Фиг. 6A согласно примеру. На Фиг. 6A и 6B в некоторых примерах первый соединитель 46a и/или второй соединитель 46b (Фиг. 5A) могут включать в себя первый участок 61 приема, второй участок 62 приема, вытянутый участок 63, соединительный участок 64 и защитный участок 65. Первый участок 61 приема может принимать первый крепежный участок 24a крепежного элемента. Например, первый участок 61 приема может иметь первую углубленную поверхность для упора первого крепежного участка 24a в установленном состоянии. Второй участок 62 приема может принимать второй крепежный участок 24b крепежного элемента. Например, второй участок 62 приема может иметь вторую углубленную поверхность для размещения второго крепежного участка 24b в установленном состоянии. Рукоятка 24c может быть соединена с первым крепежным участком 24a.
[0027] На Фиг. 6A и 6B в некоторых примерах вытянутый участок 63 может продолжать первый участок 61 приема и второго участка 62 приема (например, в направлении d1) наружу от устройства 45 крепления к корпусу ремнями (Фиг. 5A и 5B).), например, поясного ремня 55c. Например, вытянутый участок 63 может продолжать наружу положение первого и второго участков 61 и 62 приема на расстояние от поясного ремня 55c с возможностью обеспечения расстояния зазора между подвесным устройством и участком пользователя в установленном состоянии. То есть вытянутый участок 63 может обеспечивать пространство между участком бедра и/или ноги и датчиками, расположенными на соответственном подвесном устройстве. Соединительный участок 64 может соединять соответственный соединитель 46a и 46b с устройством 45 крепления к корпусу ремнями.
[0028] В некоторых примерах соответственный соединитель 46a и 46b может быть неразъемно соединен с устройством 45 крепления к корпусу ремнями. Альтернативно в некоторых примерах соответственный соединитель 46a и 46b может быть соединен с возможностью удаления с устройством 45 крепления к корпусу ремнями, например, с его поясным ремнем 55c. Защитный участок 65 может защищать участок пользователя от контакта с датчиками, принимаемыми подвесным устройством в установленном состоянии. Например, защитный участок 65 может продолжаться между участком бедра и/или ноги пользователя, а датчики расположены на подвесном устройстве. Таким образом, участок бедра и/или ноги пользователя не может непосредственно контактировать с датчиками, расположенными на подвесном устройстве во время их транспортировки. В некоторых примерах защитный участок 65 может включать в себя элемент подушки.
[0029] Фиг. 7 представляет собой блок-схему, иллюстрирующую способ перемещения датчиков согласно примеру. На Фиг. 7 в блоке S710 подвесное устройство, включающее в себя участок приема датчика, крепят к устройству крепления к корпусу ремнями с возможностью размещения подвесного устройства в установленном состоянии так, что участок приема датчика ориентирован с направленным вниз наклоном. Например, направленный вниз наклон может наклоняться от концевого участка приема участка приема датчика по направлению к стопорному элементу подвесного устройства в установленном состоянии.
[0030] В блоке S712 первый датчик принимают участком приема датчика так, что концевой участок приема участка приема датчика размещается через первое отверстие первого датчика. В блоке S714 первый датчик направляют вдоль направленного вниз наклона участка приема датчика до контакта со стопорным элементом, расположенным на расстоянии от концевого участка приема. В блоке S716 второй датчик принимают участком приема датчика так, что концевой участок приема размещается через второе отверстие второго датчика. В блоке S718 второй датчик направляют вдоль направленного вниз наклона участка приема датчика по направлению к стопорному элементу для контакта первого датчика, предварительно принимаемого участком приема датчика.
[0031] В некоторых примерах способ также может включать в себя этап, на котором удаляют подвесное устройство, включающее в себя первый датчик и второй датчик, принимаемые участком приема датчика от устройства крепления к корпусу ремнями с возможностью размещения подвесного устройства в неустановленном состоянии. Дополнительно способ также может включать в себя этап, на котором передают первый датчик и второй датчик от участка приема датчика подвесного устройства контейнеру. Например, участок приема датчика могут размещать так, что направленный вниз наклон наклоняется от стопорного элемента по направлению к концевому участку приема в неустановленном состоянии. Таким образом, направленный вниз наклон может направлять датчики, расположенные на участке приема датчика, от него и к контейнеру. В некоторых примерах первый датчик и второй датчик могут одновременно перемещаться вдоль направленного вниз наклона участка приема датчика к контейнеру.
[0032] Следует понимать, что блок-схема на Фиг. 7 иллюстрирует архитектуру, функциональные возможности и/или работу примеров настоящего раскрытия. Хотя блок-схема на Фиг. 7 иллюстрирует конкретный порядок выполнения, порядок выполнения может отличаться, от того, который изображен. Например, порядок выполнения двух или более блоков может быть изменен относительно проиллюстрированного порядка. Также два или более блоков, проиллюстрированных последовательно на Фиг. 7, могут выполняться одновременно или с частичным согласованием. Все такие изменения находятся в пределах объема охраны настоящего раскрытия.
[0033] Настоящее раскрытие описано с использованием неограничивающих подробных описаний его примеров, которые не предназначены для ограничения объема охраны общей идеи изобретения. Следует понимать, что признаки и/или операции, описанные относительно одного примера, могут быть использованы с другими примерами, и что не все примеры имеют все признаки и/или операции, проиллюстрированные на конкретной фигуре или описанные относительно одного из примеров. Изменения описанных примеров будут очевидны специалистам в области техники. Более того выражения «содержать», «включать в себя», «иметь» и родственные им выражения означают при использовании в раскрытии и/или формуле изобретения «включать в себя, но необязательно ограничиваться этим».
[0034] Отметим, что некоторые из вышеописанных примеров могут включать в себя конструкцию, действия или детали конструкций и действия, которые могут быть несущественными для общей идеи изобретения, и которые описаны в целях наглядности. Конструкция и действия, описанные здесь, являются заменяемыми на эквиваленты, которые выполняют такую же функцию, даже если конструкция или действия отличаются от тех, которые известны в уровне техники. В связи с этим объем охраны общей идеи изобретения ограничен только элементами и ограничениями, которые используются в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОРПУС ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ И УЗЕЛ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2669856C2 |
| Хирургические инструменты с приводом от двигателя, выполненные с возможностью шарнирного поворота | 2014 |
|
RU2676863C2 |
| УЧАСТКИ КРЕПЛЕНИЯ ДЛЯ УЗЛОВ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2700371C2 |
| КОНСТРУКЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОШИБОК ДЛЯ УЗЛОВ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2672524C2 |
| УСТРОЙСТВА ВТЯГИВАНИЯ ПУСКОВОГО ЭЛЕМЕНТА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2678363C2 |
| КОНСТРУКЦИИ ПРОВОДНИКОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ И ВРАЩАЮЩИМИСЯ КОНЦЕВЫМИ ЭФФЕКТОРАМИ | 2014 |
|
RU2684036C2 |
| СИСТЕМЫ ОБНАРУЖЕНИЯ КОНЦЕВОГО ЭФФЕКТОРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2685463C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2014 |
|
RU2676512C2 |
| ХИРУРГИЧЕСКИЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ С ЭКРАНОМ ИНДИКАТОРА ЗАКРЫТИЯ | 2014 |
|
RU2684179C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА | 2014 |
|
RU2693674C2 |
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Предложено подвесное устройство, которое может быть использовано с устройством крепления к корпусу ремнями. Подвесное устройство включает в себя главный корпус, стопорный элемент и крепежный элемент. Главный корпус может принимать датчики. Стопорный элемент может быть соединен с главным корпусом с возможностью размещения датчиков на главном корпусе. Дополнительно крепежный элемент может быть соединен с главным корпусом. Также крепежный элемент может крепиться с возможностью удаления к устройству крепления к корпусу ремнями в установленном состоянии и ориентировать главный корпус для направления датчиков по направлению к стопорному элементу в установленном состоянии. Технический результат – обеспечение фиксации датчиков в требуемом положении в процессе перемещения оператора по объекту исследования. 3 н. и 12 з.п. ф-лы, 10 ил. 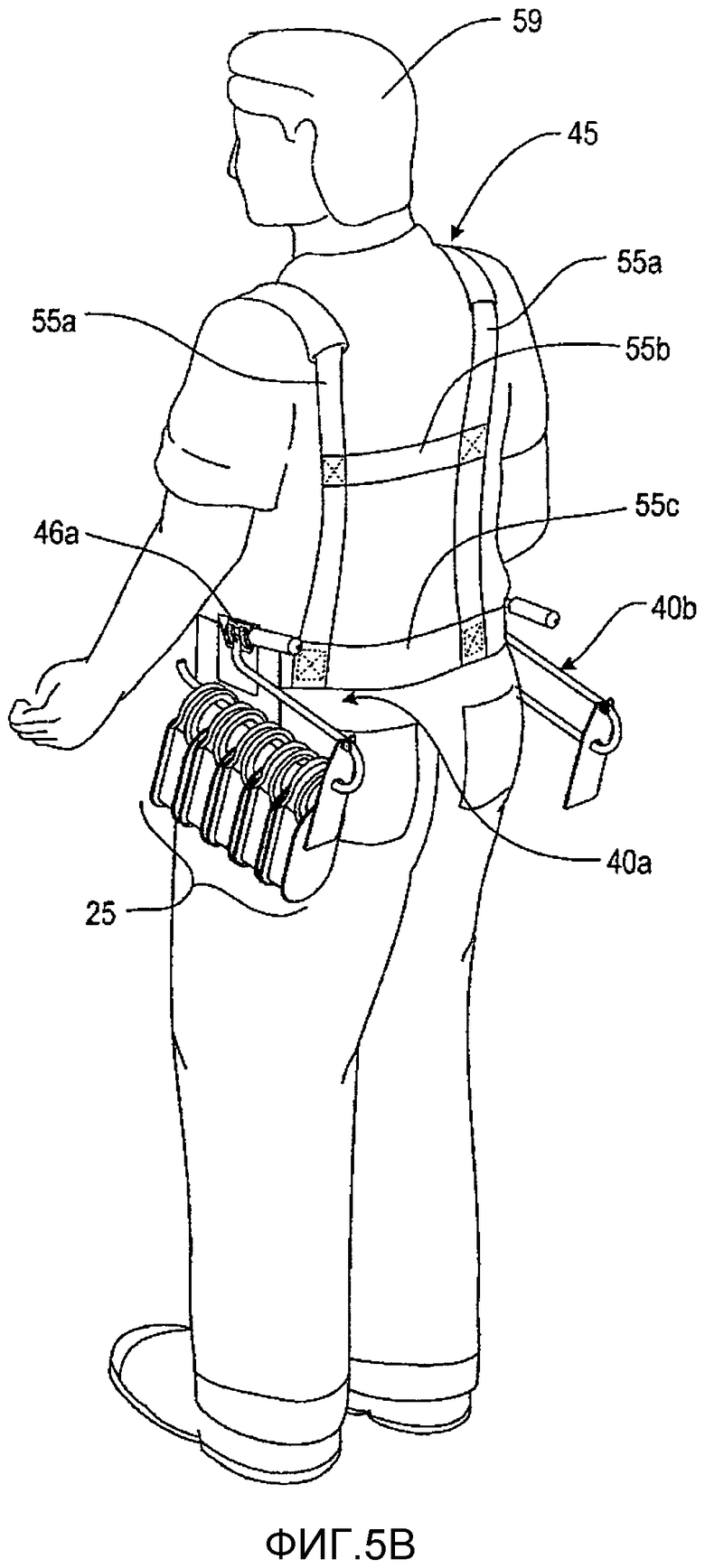
1. Подвесное устройство, пригодное к использованию с устройством крепления к корпусу ремнями, причем подвесное устройство содержит:
главный корпус с возможностью приема датчиков;
стопорный элемент, соединенный с главным корпусом с возможностью размещения датчиков на главном корпусе; и
крепежный элемент, соединенный с главным корпусом, причем крепежный элемент крепится с возможностью удаления к устройству крепления к корпусу ремнями в установленном состоянии и с возможностью ориентировать главный корпус для направления датчиков по направлению к стопорному элементу в установленном состоянии.
2. Подвесное устройство по п. 1, в котором главный корпус дополнительно содержит:
участок приема датчика, включающий в себя участок вытянутого стержня с возможностью продолжения через отверстия датчиков для приема датчиков; и
промежуточный участок, включающий в себя участок вытянутого стержня, соединенный с участком приема датчика и крепежным элементом, причем промежуточный участок и участок приема датчика образуют область зазора датчика для приема датчиков главным корпусом.
3. Подвесное устройство по п. 2, в котором крепежный элемент содержит:
первый крепежный участок; и
второй крепежный участок, расположенный между и соединенный с участком приема датчика и первым крепежным участком, причем второй крепежный участок и первый крепежный участок образуют угол между ними; и
причем второй крепежный участок является изогнутым с возможностью ориентации участка приема датчика для направления датчиков по направлению к стопорному элементу в установленном состоянии.
4. Подвесное устройство по п. 3, в котором крепежный элемент дополнительно содержит:
рукоятку, соединенную с первым крепежным участком.
5. Подвесное устройство по п. 2, в котором участок приема датчика дополнительно содержит:
концевой участок приема; и
направленный вниз наклон с возможностью наклона от концевого участка приема по направлению к стопорному элементу в установленном состоянии.
6. Подвесное устройство по п. 2, в котором стопорный элемент содержит:
по существу плоскую поверхность, причем стопорный элемент соединен с промежуточным участком и участком приема датчика с возможностью контакта с соответственным датчиком, принимаемым участком приема датчика.
7. Система перемещения датчика, содержащая:
устройство крепления к корпусу ремнями с возможностью приема пользователя, причем устройство крепления к корпусу ремнями включает в себя множество соединителей; и
множество подвесных устройств, каждое из которых включает в себя главный корпус, стопорный элемент и крепежный элемент;
причем главный корпус принимает множество датчиков;
стопорный элемент соединен с главным корпусом с возможностью размещения датчиков на главном корпусе; и
крепежный элемент соединен с главным корпусом для крепления с возможностью удаления к соответственному соединителю в установленном состоянии, причем крепежный элемент ориентирует главный корпус для направления датчиков по направлению к стопорному элементу в установленном состоянии.
8. Система перемещения датчика по п. 7, в которой главный корпус дополнительно содержит:
участок приема датчика, включающий в себя участок вытянутого стержня с возможностью продолжения через отверстия датчиков для приема датчиков; и
промежуточный участок, включающий в себя участок вытянутого стержня, соединенный с участком приема датчика и крепежным элементом, причем промежуточный участок и участок приема датчика образуют область зазора датчика для приема датчиков главным корпусом.
9. Система перемещения датчика по п. 8, в которой крепежный элемент содержит:
первый крепежный участок; и
второй крепежный участок, расположенный между и соединенный с участком приема датчика и первым крепежным участком, причем первый крепежный участок и второй крепежный участок образуют угол между ними.
10. Система перемещения датчика по п. 9, в которой каждый из множества соединителей содержит:
первый участок приема с возможностью приема первого крепежного участка крепежного элемента;
второй участок приема с возможностью приема второго крепежного участка крепежного элемента;
вытянутый участок с возможностью продолжения первого участка приема и второго участка приема наружу от устройства крепления к корпусу ремнями;
соединительный участок с возможностью соединения соответственного соединителя с устройством крепления к корпусу ремнями; и
защитный участок с возможностью защиты участка пользователя от контакта с датчиками, принимаемыми соответственным подвесным устройством.
11. Система перемещения датчика по п. 7, в которой устройство крепления к корпусу ремнями дополнительно содержит:
множество ремней, соединенных друг с другом для образования области корпуса с возможностью приема пользователя; и
элемент регулировки ремня с возможностью регулировки длины соответственного ремня для соответствия пользователю.
12. Способ перемещения датчиков, содержащий этапы, на которых:
крепят подвесное устройство, включающее в себя участок приема датчика, к устройству крепления к корпусу ремнями с возможностью размещения подвесного устройства в установленном состоянии так, что участок приема датчика ориентируется с направленным вниз наклоном;
принимают первый датчик участком приема датчика так, что концевой участок приема участка приема датчика размещается через первое отверстие первого датчика;
направляют первый датчик вдоль направленного вниз наклона участка приема датчика до контакта со стопорным элементом, расположенным на расстоянии от концевого участка приема;
принимают второй датчик участком приема датчика так, что концевой участок приема размещается через второе отверстие второго датчика; и
направляют второй датчик вдоль направленного вниз наклона участка приема датчика по направлению к стопорному элементу до контакта с первым датчиком, предварительно принимаемым участком приема датчика.
13. Способ по п. 12, в котором направленный вниз наклон наклоняется от концевого участка приема по направлению к стопорному элементу в установленном состоянии.
14. Способ по п. 12, дополнительно содержащий этапы, на которых:
удаляют подвесное устройство, включающее в себя первый датчик и второй датчик, принимаемые участком приема датчика от устройства крепления к корпусу ремнями для размещения подвесного устройства в неустановленном состоянии; и
передают первый датчик и второй датчик от участка приема датчика подвесного устройства контейнеру.
15. Способ по п. 14, в котором этап, на котором передают первый датчик и второй датчик от участка приема датчика подвесного устройства контейнеру, дополнительно содержит этапы, на которых:
размещают участок приема датчика так, что направленный вниз наклон наклоняется от стопорного элемента по направлению к концевому участку приема в неустановленном состоянии; и
одновременно перемещают первый датчик и второй датчик вдоль направленного вниз наклона участка приема датчика к контейнеру.
| US 4540943 A1, 10.09.1985;KR 200370872 Y1, 18.12.2004;KR 2020120003484 U, 21.05.2012;JP 2008232803 A, 02.10.2008. |

