ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и, в различных конструкциях, к хирургическим рассекающим и сшивающим скобками инструментам с электропитанием и используемым в них кассетам со скобками, которые выполнены с возможностью разрезания и сшивания ткани скобками.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Хирургические сшивающие инструменты часто применяют для размещения скоб в мягких тканях для уменьшения или устранения кровотечения из мягких тканей, в особенности, например, при рассечении ткани. Такие хирургические сшивающие инструменты, как, например, эндоскопический рассекатель, могут содержать концевой эффектор, который может перемещаться или шарнирно поворачиваться относительно узла удлиненного ствола. Концевые эффекторы зачастую выполняются с возможностью фиксации мягких тканей между первой и второй браншей, причем первая бранша часто включает в себя кассету со скобками, выполненную с возможностью хранения в нем и извлечения из него скоб, а вторая бранша часто включает упорную пластину. Такие хирургические сшивающие устройства включают в себя зажимную систему для поворота упорной пластины относительно кассеты со скобками.
Хирургические сшивающие устройства, как описано выше, могут быть сконструированы с возможность поворота упорного элемента концевого эффектора относительно кассеты со скобками с целью зажатия между ними мягких тканей. При различных обстоятельствах упорная пластина может быть сконструирована для приложения фиксирующей силы к мягкой ткани с целью прочного удержания мягкой ткани между упорной пластиной и кассетой со скобками. Однако если хирурга не удовлетворяет положение концевого эффектора, хирург, как правило, должен активировать механизм высвобождения на хирургическом сшивающем инструменте для поворота упора в открытое положение, а затем изменить положение концевого эффектора. Далее, скобы, как правило, подаются из кассеты со скобками при помощи выталкивателя, который проходит сквозь желоб в кассете со скобками, что вызывает деформирование скоб об упорный элемент и скрепляет слои мягких тканей. Как известно специалистам в данной области, для более надежного скрепления слоев ткани скобы часто накладывают в несколько линий, или рядов. Концевой зажим может также включать режущий инструмент, например, нож, который выдвигается между двух рядов скоб для иссечения мягкой ткани после сшивания скобами слоев мягкой ткани.
Такие хирургические сшивающие инструменты и эффекторы могут быть по форме и размеру выполнены с возможностью вставки их в полость тела через троакар или другое отверстие для доступа. Концевой эффектор, как правило, связан с удлиненным стволом, размер которого позволяет ему проходить через троакар или отверстие. Узел удлиненного ствола часто функционально связан с рукояткой, которая поддерживает системы управления и/или спусковые механизмы, предназначенные для управления работой концевого эффектора. Чтобы облегчить правильное размещение и положение концевого эффектора внутри тела, многие хирургические инструменты выполнены с возможностью облегчения шарнирного поворота концевого эффектора относительно участка удлиненного ствола.
Хирургические инструменты с электропитанием описаны в публикации заявки на патент США № US 2009/0090763 A1, озаглавленной «ХИРУРГИЧЕСКОЕ СШИВАЮЩЕЕ УСТРОЙСТВО С ЭЛЕКТРОПИТАНИЕМ», Zemlok et al. (далее в этом документе Zemlok ‘763), полное описание которой включено в настоящий документ путем ссылки. Хирургические инструменты с электропитанием также описаны в публикации заявки на патент США № US 2011/0278344 A1, озаглавленной «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ», Zemlok et al. (далее в этом документе Zemlok ‘344), в настоящее время патент США № 8,201,721, полное описание которого включено в настоящий документ путем ссылки.
Изложенное выше описание предназначено лишь для иллюстрации различных аспектов соответствующей технологии в области применения изобретения в настоящее время, и его не следует рассматривать как ограничение объема формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Особенности и преимущества настоящего изобретения, а также способ их достижения станут более очевидными, а само изобретение станет более понятным после ознакомления со следующим описанием вариантов осуществления изобретения в сочетании с сопроводительными чертежами, причем:
На ФИГ. 1 представлен вид в перспективе хирургического инструмента с применением одной формы конструкции втягивания.
На ФИГ. 2 представлен вид в перспективе примера загрузочного блока, который можно использовать с подключением к различным хирургическим инструментам, описанными в настоящем документе.
На ФИГ. 3 представлен вид в перспективе с пространственным разделением компонентов участка загрузочного блока, изображенного на ФИГ. 2.
На ФИГ. 4 представлен вид сверху участка хирургического инструмента, изображенного на ФИГ. 1.
На ФИГ. 5 представлен частичный вид сбоку участка хирургического инструмента, изображенного на ФИГ. 4, с узлом сцепления в расцепленном положении.
На ФИГ. 6 представлен вид сверху варианта осуществления участка узла втягивания и конструкции его рычага втягивания.
На ФИГ. 7 представлен частичный вид с пространственным разделением компонентов одной формы приводного блока, участки которого показаны в поперечном сечении.
На ФИГ. 8 представлен другой вид сверху участка хирургического инструмента с системой блокировки приводного блока в заблокированном положении.
На ФИГ. 9 представлен вид сверху одной формы узла блокирующей собачки.
На ФИГ. 10 показан вид сбоку в вертикальной проекции узла блокирующей собачки, изображенного на ФИГ. 9.
На ФИГ. 11 представлен вид снизу узла блокирующей собачки, изображенного на ФИГ. 9 и 10.
На ФИГ. 12 представлен вид спереди варианта осуществления корпуса редуктора.
На ФИГ. 13 представлен частичный вид сбоку в поперечном сечении варианта осуществления хирургического инструмента, участки которого показаны в поперечном сечении и с системой блокировки приводного блока в заблокированном положении.
На ФИГ. 14 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента, изображенного на ФИГ. 13, причем система блокировки приводного блока находится в незаблокированном положении.
На ФИГ. 15 представлен вид сверху другого варианта осуществления хирургического инструмента с удаленным участком корпуса для демонстрации участка конструкции системы блокировки приводного блока инструмента.
На ФИГ. 16 представлен частичный вид сбоку в поперечном сечении варианта осуществления хирургического инструмента, изображенного на ФИГ. 15, причем его участки показаны в поперечном сечении, сплошными линиями показана система блокировки приводного блока в заблокированном положении, а пунктирными линиями показана система блокировки приводного блока в незаблокированном положении.
На ФИГ. 17 представлен другой частичный вид сверху варианта осуществления хирургического инструмента, изображенного на ФИГ. 15 и 16, причем сплошными линиями показано положение рычага втягивания перед активацией, а пунктирными линиями показано положение рычага втягивания после начальной активации.
На ФИГ. 18 представлен другой частичный вид сверху варианта осуществления хирургического инструмента, изображенного на ФИГ. 15-17, причем пунктирными линиями показан рычаг втягивания в полностью активированном положении.
На ФИГ. 19 представлен частичный вид сверху участка другого варианта осуществления хирургического инструмента, на котором участок корпуса опущен, чтобы продемонстрировать систему блокировки приводного блока инструмента, и причем сплошными линиями показан рычаг втягивания в незадействованном положении, а пунктирными линиями показан рычаг втягивания после начальной активации.
На ФИГ. 20 представлен частичный вид сверху другого варианта осуществления хирургического инструмента, причем участок корпуса опущен, чтобы продемонстрировать его систему блокировки приводного блока в заблокированном положении.
На ФИГ. 21 представлен другой частичный вид сверху варианта осуществления хирургического инструмента, изображенного на ФИГ. 20, причем система блокировки приводного блока находится в незаблокированном положении.
На ФИГ. 22 представлен частичный вид сбоку в поперечном сечении участка хирургического инструмента и концевого эффектора, причем его узел втягивания находится в неактивированном положении.
На ФИГ. 23 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента и концевого эффектора, изображенных на ФИГ. 22, после пуска узла пускового стержня.
На ФИГ. 24 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента и концевого эффектора, изображенных на ФИГ. 23, после активации узла втягивания для втягивания приводной штанги назад в ее исходное положение внутри концевого эффектора.
На ФИГ. 25 представлен частичный вид сбоку в поперечном сечении участка другого хирургического инструмента и концевого эффектора в состоянии перед пуском, причем его узел втягивания находится в неактивированном положении.
На ФИГ. 26 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента и концевого эффектора, изображенных на ФИГ. 25, после пуска.
На ФИГ. 27 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента и концевого эффектора, изображенных на ФИГ. 26, причем защелка его узла втягивания находится в незаблокированном положении.
На ФИГ. 28 представлен другой частичный вид сбоку в поперечном сечении хирургического инструмента и концевого эффектора, изображенных на ФИГ. 27, причем дистальный участок пускового стержня находится во втянутом положении.
На ФИГ. 29 представлен частичный вид в поперечном сечении участка другого варианта осуществления хирургического инструмента, причем его узел соединителя привода находится в положении шарнирного поворота.
На ФИГ. 30 представлен частичный вид в поперечном сечении участка варианта осуществления хирургического инструмента, изображенного на ФИГ. 29, причем его узел соединителя привода находится в положении пуска.
На ФИГ. 31 представлен увеличенный вид в поперечном сечении узла соединителя привода хирургического инструмента, изображенного на ФИГ. 29 и 30, причем сплошными линиями показан элемент соединителя селектора в положении шарнирного поворота, а пунктирными линиями показан элемент соединителя селектора в положении пуска.
На ФИГ. 32 представлен частичный вид в поперечном сечении участка другого варианта осуществления хирургического инструмента.
На ФИГ. 33 представлен увеличенный частичный вид в поперечном сечении участка хирургического инструмента, изображенного на ФИГ. 32.
На ФИГ. 34 представлен другой увеличенный частичный вид в поперечном сечении участка хирургического инструмента, изображенного на ФИГ. 32 и 33, причем его ограничитель перемещения находится в самом дистальном положении.
На ФИГ. 35 представлен другой увеличенный частичный вид в поперечном сечении участка хирургического инструмента, изображенного на ФИГ. 32-34, причем его ограничитель перемещения находится в самом проксимальном положении.
На ФИГ. 36 представлен частичный вид в поперечном сечении хирургического инструмента, изображенного на ФИГ. 33, вдоль линии 36-36, показанной на ФИГ. 33.
На ФИГ. 37 представлен частичный вид в перспективе участка хирургического инструмента, изображенного на ФИГ. 32-36.
На ФИГ. 38 представлен частичный вид в перспективе ствола хирургического инструмента, манжеты и одноразового загрузочного блока, не прикрепленный к стволу, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 39 представлен частичный вид в перспективе ствола, манжеты и одноразового загрузочного блока, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, прикрепленный к стволу.
На ФИГ. 40 представлен частичный вид в перспективе с пространственным разделением компонентов ствола, манжеты и одноразового загрузочного блока, изображенных на ФИГ. 38.
На ФИГ. 41 представлен другой частичный вид в перспективе с пространственным разделением компонентов ствола, манжеты и одноразового загрузочного блока, изображенных на ФИГ. 38.
На ФИГ. 42 представлен вид в перспективе дистального участка крепления одноразового загрузочного блока, изображенного на ФИГ. 38.
На ФИГ. 43 представлен другой вид в перспективе дистального участка крепления одноразового загрузочного блока, изображенного на ФИГ. 38.
На ФИГ. 44 представлен вид в перспективе проксимального участка крепления ствола, изображенного на ФИГ. 38.
На ФИГ. 45 представлен другой вид в перспективе проксимального участка крепления ствола, изображенного на ФИГ. 38.
На ФИГ. 46 представлен вид в перспективе манжеты и пускового ствола хирургического инструмента, изображенных на ФИГ. 38.
На ФИГ. 47 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, прикрепленный к стволу.
На ФИГ. 48 представлен частичный вид в вертикальной проекции в поперечном сечении одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, не прикрепленный к стволу.
На ФИГ. 49 представлен частичный вид в вертикальной проекции в поперечном сечении одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, прикрепленный к стволу.
На ФИГ. 50 представлен вид в вертикальной проекции манжеты и ствола, изображенных на ФИГ. 38, вдоль плоскости, указанной на ФИГ. 48.
На ФИГ. 51 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, не прикрепленный к стволу, и дополнительно показана манжета в исходном положении относительно ствола.
На ФИГ. 52 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, не прикрепленный к стволу, и дополнительно показана манжета в исходном положении относительно ствола.
На ФИГ. 53 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, входящий в ствол, и дополнительно показана манжета в исходном положении относительно ствола.
На ФИГ. 54 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, входящий в ствол, и дополнительно показана манжета во втором положении, повернутом относительно ствола.
На ФИГ. 55 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, входящий в ствол, и дополнительно показана манжета во втором положении, повернутом относительно ствола.
На ФИГ. 56 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, полностью вставленный в ствол, и дополнительно показана манжета во втором положении, повернутом относительно ствола.
На ФИГ. 57 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, полностью вставленный в ствол, и дополнительно показана манжета в исходном положении относительно ствола.
На ФИГ. 58 представлен частичный вид в поперечном сечении в перспективе одноразового загрузочного блока, манжеты и ствола, изображенных на ФИГ. 38, на котором показан одноразовый загрузочный блок, полностью вставленный в ствол, и дополнительно показана манжета в исходном положении относительно ствола.
На ФИГ. 59 представлен частичный вид в поперечном сечении в перспективе ствола хирургического инструмента и одноразового загрузочного блока, не прикрепленного к стволу, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 60 представлен частичный вид в поперечном сечении в перспективе ствола и одноразового загрузочного блока, изображенных на ФИГ. 59, на котором показан одноразовый загрузочный блок, частично вставленный в ствол, и дополнительно показана защелка в незаблокированном положении.
На ФИГ. 61 представлен частичный вид в поперечном сечении в перспективе ствола и одноразового загрузочного блока, изображенных на ФИГ. 59, на котором показан одноразовый загрузочный блок, полностью вставленный в ствол, и дополнительно показана защелка в положении блокировки.
На ФИГ. 62 представлен частичный вид в вертикальной проекции в поперечном сечении ствола и одноразового загрузочного блока, изображенных на ФИГ. 59, на котором показан одноразовый загрузочный блок, полностью вставленный в ствол, и дополнительно показана защелка в положении блокировки.
На ФИГ. 63 представлено схематическое изображение кривой зависимости крутящего момента от напряжения в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 64(a) представлено схематическое изображение импульсов с высоким коэффициентом заполнения, переданных схемой широтно-импульсной модуляции в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 64(b) представлено схематическое изображение импульсов с низким коэффициентом заполнения, переданных схемой широтно-импульсной модуляции в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 65(a) представлено схематическое изображение пускового элемента, управляемого импульсами с высоким коэффициентом заполнения схемы широтно-импульсной модуляции, изображенной на ФИГ. 64(a).
На ФИГ. 65(b) представлено схематическое изображение пускового элемента, управляемого импульсами с низким коэффициентом заполнения схемы широтно-импульсной модуляции, изображенной на ФИГ. 64(b).
На ФИГ. 66(a)-66(c) представлены схематические изображения схем широтно-импульсной модуляции, имеющих первичный комплект катушек и вторичный комплект катушек, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 67 представлен график, на котором показаны скорость и крутящий момент на протяжении пускового хода, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 68 представлен график, на котором показан сегмент ограничения скорости испытания во время пускового хода, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 69 и 70 представлены схематические изображения упрощенного шагового двигателя в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 71-73 представлены схематические изображения гибридного шагового двигателя в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 74(a)-74(c) представлены схематические изображения гибридного шагового двигателя, изображенного на ФИГ. 71-73, показывающие изменение полярностей.
На ФИГ. 75 представлен вид в перспективе экрана, который представляет собой сенсорный экран для применения с эндоскопом, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 76 представлен вид в вертикальной проекции первого информационного слоя для отображения на экране, изображенном на ФИГ. 75, причем первый информационный слой включает в себя обратную связь в форме видеоизображения одноразового загрузочного блока (ОЗБ), прикрепленного к хирургическому инструменту, видимого с помощью эндоскопа.
На ФИГ. 77 представлен вид в вертикальной проекции второго информационного слоя для отображения на экране, изображенном на ФИГ. 75, причем второй информационный слой включает в себя панель управления для приема входного сигнала посредством сенсорного экрана.
На ФИГ. 78 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76.
На ФИГ. 79 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя цифровые данные, относящиеся к продвижению скальпеля, и визуальное представление продвижения скальпеля, когда скальпель находится близко к началу пускового хода.
На ФИГ. 80 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя цифровые данные, относящиеся к продвижению скальпеля, и визуальное представление продвижения скальпеля, когда скальпель находится близко к дистальному концу пускового хода.
На ФИГ. 81 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя символическое представление скальпеля, наложенное на обнаруженное положение скальпеля в ОЗБ, показанное в первом информационном слое.
На ФИГ. 82 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя графическое представление скорости продвижения скальпеля дистально во время пускового хода.
На ФИГ. 83 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя графическое представление усилия зажима, оказываемого браншами ОЗБ на ткань вдоль длины бранш ОЗБ.
На ФИГ. 84 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя цифровые данные, относящиеся к положению ОЗБ, и при этом ОЗБ, показанный на первом информационном слое, не находится в положении шарнирного поворота.
На ФИГ. 85 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя цифровые данные, относящиеся к положению ОЗБ, и визуальное представление положения ОЗБ, и при этом ОЗБ, показанный на первом информационном слое, находится в положении шарнирного поворота.
На ФИГ. 86 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, показывающий ввод данных от пользователя для регулировки шарнирного поворота ОЗБ посредством сенсорного экрана, изображенного на ФИГ. 75.
На ФИГ. 87 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, показывающий схематическое изображение управления ОЗБ и дополнительно показывающий ввод данных от пользователя для регулировки шарнирного поворота ОЗБ путем управления схемой посредством сенсорного экрана, изображенного на ФИГ. 75.
На ФИГ. 88 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, показывающий ОЗБ в положении шарнирного поворота на первом информационном слое в ответ на ввод данных пользователем, показанный на ФИГ. 86 и 87.
На ФИГ. 89 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, показывающий ввод данных от пользователя для управления замыканием бранши, выполненной с возможностью перемещения, посредством сенсорного экрана, изображенного на ФИГ. 75.
На ФИГ. 90 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, показывающий браншу ОЗБ, выполненную с возможностью перемещения, в зажатом положении на первом информационном слое в ответ на ввод данных пользователем, который показан на ФИГ. 89.
На ФИГ. 91 представлен вид в вертикальной проекции интерфейса контроллера для второго информационного слоя, изображенного на ФИГ. 77.
На ФИГ. 92 представлен вид в вертикальной проекции второго информационного слоя, изображенного на ФИГ. 77, с наложением на первый информационный слой, изображенный на ФИГ. 76, причем второй информационный слой включает в себя интерфейс контроллера, изображенный на ФИГ. 91, и линейку продвижения.
На ФИГ. 93 представлено схематическое изображение, показывающее систему связи для контроллера обратной связи и эндоскопа, хирургического инструмента и экрана, изображенных на ФИГ. 75.
На ФИГ. 94 представлен вид с пространственным разделением компонентов системы хирургического инструмента, включая рукоятку и концевой эффектор, включая множество индикаторов в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 95 представлен частичный вид в вертикальной проекции рукоятки системы хирургического инструмента, включая множество индикаторов в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 96 представлен частичный вид в поперечном сечении рукоятки системы хирургического инструмента, включая предохранитель спускового механизма в соответствии с, по меньшей мере, одним вариантом осуществления, причем предохранитель спускового механизма показан в незаблокированном состоянии.
На ФИГ. 97 представлен частичный вид в поперечном сечении рукоятки, изображенной на ФИГ. 96, показывающий предохранитель спускового механизма в заблокированном состоянии.
На ФИГ. 98 представлен вид в поперечном сечении предохранителя спускового механизма, изображенного на ФИГ. 96, показывающий предохранитель спускового механизма в его незаблокированном состоянии.
На ФИГ. 99 представлен вид в поперечном сечении предохранителя спускового механизма, изображенного на ФИГ. 96, показывающий предохранитель спускового механизма в его заблокированном состоянии.
На ФИГ. 99A представлена блок-схема с описанием операционной программы контроллера хирургического инструмента для оценки того, подвергался ли хирургический инструмент воздействию температуры, превышающей его пороговую температуру, и определения того, каким образом уведомить пользователя хирургического инструмента о превышении порога температуры.
На ФИГ. 100 представлен вид в поперечном сечении рукоятки системы хирургического инструмента, включая предохранитель спускового механизма в заблокированном состоянии, в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 101 представлен подробный вид в поперечном сечении рукоятки, изображенной на ФИГ. 100, показывающий предохранитель спускового механизма в его заблокированном состоянии.
На ФИГ. 102 представлен другой подробный вид в поперечном сечении рукоятки, изображенной на ФИГ. 100, показывающий предохранитель спускового механизма в незаблокированном состоянии.
На ФИГ. 103 представлен вид в перспективе предохранителя спускового механизма, изображенного на ФИГ. 100, который показан в его заблокированном состоянии.
На ФИГ. 104 представлен частичный вид в поперечном сечении в перспективе рукоятки хирургического инструмента, включая предохранитель спускового механизма в заблокированном состоянии, в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 105 представлен частичный вид в поперечном сечении в перспективе рукоятки, изображенной на ФИГ. 104, которая показана в незаблокированном состоянии.
На ФИГ. 106 представлен частичный вид слева сбоку в поперечном сечении рукоятки, изображенной на ФИГ. 104, которая показана в ее заблокированном состоянии.
На ФИГ. 107 представлен частичный вид справа сбоку в поперечном сечении рукоятки, изображенной на ФИГ. 104, которая показана в ее заблокированном состоянии.
На ФИГ. 108 представлен частичный вид слева сбоку в поперечном сечении рукоятки, изображенной на ФИГ. 104, которая показана в ее незаблокированном состоянии.
На ФИГ. 109 представлен частичный вид справа сбоку в поперечном сечении рукоятки, изображенной на ФИГ. 104, которая показана в ее незаблокированном состоянии.
На ФИГ. 110 представлена схема процесса, показывающая этапы, которые может использовать контроллер хирургического инструмента для обработки сигнала, принятого от концевого эффектора, прикрепленного к хирургическому инструменту.
На ФИГ. 110A представлено схематическое изображение массива параметров, которые могут передаваться от концевого эффектора к хирургическому инструменту.
На ФИГ. 111 представлена схема процесса, показывающая этапы использования концевого эффектора и хирургического инструмента, изображенных на ФИГ. 110.
На ФИГ. 112 представлено схематическое изображение взаимного соединения между концевым эффектором и стволом хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 113 представлен вид в горизонтальной проекции печатной платы взаимного соединения, изображенного на ФИГ. 112.
На ФИГ. 114 представлен частичный вид в перспективе концевого эффектора хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 115 представлен частичный вид в перспективе концевого эффектора, изображенного на ФИГ. 114, и ствола хирургического инструмента.
На ФИГ. 116 представлен вид в поперечном сечении концевого эффектора, изображенного на ФИГ. 114, прикрепленного к стволу, изображенному на ФИГ. 115.
На ФИГ. 117 представлен вид в поперечном сечении взаимного соединения между концевым эффектором и стволом в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 118 представлен вид в поперечном сечении взаимного соединения между концевым эффектором и стволом в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 119 представлен вид в поперечном сечении взаимного соединения между концевым эффектором и стволом в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 120 представлен подробный вид взаимного соединения, изображенного на ФИГ. 119.
На ФИГ. 121 представлен вид сбоку концевого эффектора, содержащего упор и индикатор положения упора в соответствии с, по меньшей мере, одним вариантом осуществления, на котором упор показан в открытом положении.
На ФИГ. 122 представлен вид сбоку концевого эффектора, изображенного на ФИГ. 121, на котором упор показан в частично закрытом положении.
На ФИГ. 123 представлен другой вид сбоку концевого эффектора, изображенного на ФИГ. 121, на котором упор показан в частично закрытом положении.
На ФИГ. 124 представлен другой вид сбоку концевого эффектора, изображенного на ФИГ. 121, на котором упор показан в частично закрытом положении.
На ФИГ. 125 представлен подробный вид индикатора положения упора, изображенного на ФИГ. 121, на котором упор показан в положении, изображенном на ФИГ. 121.
На ФИГ. 126 представлен подробный вид индикатора положения упора, изображенного на ФИГ. 121, на котором упор показан в положении, изображенном на ФИГ. 122.
На ФИГ. 127 представлен подробный вид индикатора положения упора, изображенного на ФИГ. 121, на котором упор показан в положении, изображенном на ФИГ. 123.
На ФИГ. 128 представлен подробный вид индикатора положения упора, изображенного на ФИГ. 121, на котором упор показан в положении, изображенном на ФИГ. 124.
На ФИГ. 129 показан вид сбоку в поперечном сечении хирургического инструмента в соответствии с некоторыми вариантами осуществления, описанными в настоящем документе.
На ФИГ. 130 показана система электропитания для подачи электропитания на хирургический инструмент, изображенный на ФИГ. 129, причем система электропитания находится в соединении с системой управления хирургического инструмента, изображенного на ФИГ. 129.
На ФИГ. 131 показана аккумуляторная батарея системы электропитания, изображенной на ФИГ. 130, соединенная с базой зарядного устройства.
На ФИГ. 132 показана схема управления электропитанием системы электропитания, изображенной на ФИГ. 130.
На ФИГ. 133 представлена принципиальная блок-схема, показывающая параметры работы системы электропитания, изображенной на ФИГ. 130.
На ФИГ. 134 представлен вид в перспективе источника электропитания хирургического инструмента в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 135 представлен вид в перспективе источника электропитания, изображенного на ФИГ. 134, в разобранном виде в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 136 показана принципиальная схема цепи источника электропитания, изображенного на ФИГ. 134, включающая в себя интактный разрываемый участок в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 137 показана принципиальная схема цепи, изображенной на ФИГ. 136, с разрывом на разрываемом участке в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 138 показана блок-схема системы для защиты данных, хранящихся в памяти, от несанкционированного доступа в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 139 представлен вид в перспективе источника электропитания хирургического инструмента, включая закрытый крышкой портал доступа к данным.
На ФИГ. 140 представлен портал доступа к данным, изображенный на ФИГ. 139, в незакрытой конфигурации.
На ФИГ. 141 представлен вид в перспективе источника электропитания хирургического инструмента, включая внутренний портал доступа к данным.
На ФИГ. 142 показана блок-схема системы для защиты данных, хранящихся в памяти, от несанкционированного доступа в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 143 представлен вид в перспективе источника электропитания хирургического инструмента в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 144 представлен вид в перспективе источника электропитания, изображенного на ФИГ. 143, связанного с хирургическим инструментом.
На ФИГ. 145 показаны светодиоды источника электропитания, изображенного на ФИГ. 143, в разных конфигурациях в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 146 представлен вид сбоку хирургического инструмента, включая корпус, в соответствии с различными вариантами осуществления, описанными в настоящем документе.
На ФИГ. 147 представлен вид сбоку корпуса, изображенного на ФИГ. 146, причем наружная оболочка удалена, чтобы продемонстрировать компоненты, выполненные с возможностью отсоединения, присоединенные к корпусу с помощью крепежных элементов.
На ФИГ. 148 представлен вид сбоку корпуса, изображенного на ФИГ. 147, причем компоненты, выполненные с возможностью отсоединения, удалены из корпуса.
На ФИГ. 149 представлено схематическое изображение обнаруживаемых углублений, вырезов или вдавливаний штрих-кода, сформированных на поверхности концевого эффектора.
На ФИГ. 150 представлено схематическое изображение примера штрих-кода, используемого с устройством считывания штрих-кода.
На ФИГ. 151 представлен частичный вид сбоку ствола концевого эффектора, включая штрих-код, в соответствии с, по меньшей мере, одним вариантом осуществления.
На Фиг. 152 представлен частичный вид в вертикальной проекции концевого эффектора хирургического инструмента, включая штрих-код, в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 153 представлен частичный вид в перспективе рукоятки хирургического инструмента, включая устройство считывания штрих-кода, в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 154 представлен вид в поперечном сечении устройства считывания штрих-кода, изображенного на ФИГ. 153, с расположенным на нем концевым эффектором.
На ФИГ. 155 представлен вид в перспективе с пространственным разделением компонентов концевого эффектора и ствола хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 156 представлен вид в перспективе с пространственным разделением компонентов концевого эффектора и ствола хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления, причем концевой эффектор содержит участки пускового элемента, заблокированные вместе с возможностью высвобождения.
На ФИГ. 157 представлен частичный вид в перспективе участков пускового элемента, изображенного на ФИГ. 156, заблокированных вместе с помощью фиксирующего элемента.
На ФИГ. 158 представлен частичный вид в перспективе участков пускового элемента и фиксирующего элемента, изображенных на ФИГ. 156, причем участок пускового элемента удален, чтобы показать фиксирующий элемент, блокирующий вместе участки пускового элемента с возможностью высвобождения.
На ФИГ. 159 представлен вид с пространственным разделением компонентов пускового элемента, изображенного на ФИГ. 156, и исполнительного механизма высвобождения, выполненного с возможностью перемещения фиксирующего элемента в незаблокированное состояние и высвобождения участков пускового элемента.
На ФИГ. 160 представлен частичный вид с пространственным разделением компонентов взаимного соединения между исполнительным механизмом высвобождения, изображенным на ФИГ. 159, и соответствующим исполнительным механизмом высвобождения ствола.
На ФИГ. 161 представлен вид в поперечном сечении взаимного соединения, изображенного на ФИГ. 160.
На ФИГ. 162 представлен вид в перспективе с пространственным разделением компонентов узла, содержащего двигатель, приводной вал и муфту скольжения, выполненную с возможностью селективной передачи поворота между двигателем и приводным валом.
На ФИГ. 163 представлен вид в сечении узла, изображенного на ФИГ. 162.
На ФИГ. 164 представлен вид в перспективе смещающего элемента муфты скольжения, изображенной на ФИГ. 162.
На ФИГ. 165 представлен вид в поперечном сечении узла, изображенного на ФИГ. 162, показывающий фрикционный элемент муфты скольжения в нейтральном положении.
На ФИГ. 166 представлен вид в поперечном сечении узла, изображенного на ФИГ. 162, показывающий фрикционный элемент, изображенный на ФИГ. 165, в переднем положении.
На ФИГ. 167 представлен вид в поперечном сечении узла, изображенного на ФИГ. 162, показывающий фрикционный элемент, изображенный на ФИГ. 165, в обратном положении.
На ФИГ. 168 представлен вид в перспективе двигателя и узла зубчатой передачи в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 169 представлен вид в перспективе двигателя, узла зубчатой передачи и генератора звуковой обратной связи в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 170 представлен вид в вертикальной проекции зубца на диске узла зубчатой передачи, изображенного на ФИГ. 169, причем диск поворачивается в направлении по часовой стрелке, а зубец входит в зацепление с кликером генератора звуковой обратной связи, изображенного на ФИГ. 169, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 171 представлен вид в вертикальной проекции зубца на диске узла зубчатой передачи, изображенного на ФИГ. 169, причем диск поворачивается в направлении против часовой стрелки, а зубец входит в зацепление с кликером генератора звуковой обратной связи, изображенного на ФИГ. 169, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 172 представлен вид в перспективе двигателя, узла зубчатой передачи, имеющего множество дисков, и генератора звуковой обратной связи в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 173 представлено графическое изображение обратной связи, сгенерированной около конца пускового хода генератором звуковой обратной связи, изображенным на ФИГ. 172, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 174 и 175 представлены графические изображения обратной связи, сгенерированной около предела шарнирного поворота загрузочного блока генератором звуковой обратной связи, изображенным на ФИГ. 172, в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 176 представлено схематическое изображение алгоритма эксплуатации хирургического инструмента.
На ФИГ. 177 представлено другое схематическое изображение алгоритма эксплуатации хирургического инструмента.
На ФИГ. 178 представлено схематическое изображение алгоритма эксплуатации хирургического инструмента.
На ФИГ. 179 представлена цепь, выполненная с возможностью указания напряжения аккумулятора.
На ФИГ. 180 схематично представлен мигающий сигнал, выполненный с возможностью указания на заряженное состояние аккумулятора.
На ФИГ. 181 представлено схематическое изображение диагностической проверки при применении хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления.
На ФИГ. 182 представлено схематическое изображение разряженного аккумулятора и прекращения подачи электропитания при заряде аккумулятора ниже минимального уровня заряда.
На ФИГ. 183 представлена таблица информации, которую можно сохранять, в которой регистрируют эксплуатационные и/или рабочие характеристики аккумулятора.
На ФИГ. 184 представлено схематическое изображение цепи диагностики аккумулятора.
На ФИГ. 185 представлен вид в перспективе герметизированного двигателя и узла зубчатой передачи для применения с хирургическим инструментом в соответствии с различными вариантами осуществления настоящего описания.
На ФИГ. 186 представлен вид в вертикальной проекции в поперечном сечении с пространственным разделением компонентов герметизированного двигателя и узла зубчатой передачи, изображенных на ФИГ. 185, в соответствии с различными вариантами осуществления настоящего описания.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США, озаглавленная «УСТРОЙСТВА ДЛЯ ВТЯГИВАНИЯ ПУСКОВОГО ЭЛЕМЕНТА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7293USNP/130016;
- заявка на патент США, озаглавленная «КОНСТРУКЦИИ ВСПОМОГАТЕЛЬНЫХ АККУМУЛЯТОРОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7294USNP/130017;
- заявка на патент США, озаглавленная «КОНСТРУКЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОШИБОК ДЛЯ УЗЛОВ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7295USNP/130018;
- заявка на патент США, озаглавленная «УЧАСТКИ КРЕПЛЕНИЯ ДЛЯ УЗЛОВ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7296USNP/130019;
- заявка на патент США, озаглавленная «ЦЕПЬ ДЛЯ ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ПРИМЕНЕНИЯ АККУМУЛЯТОРНОЙ БАТАРЕИ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7297USNP/130020;
- заявка на патент США, озаглавленная «СИСТЕМЫ ИНДИКАТОРОВ ЗАКРЫТИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7298USNP/130021;
- заявка на патент США, озаглавленная «ОПТИМИЗАЦИЯ КРУТЯЩЕГО МОМЕНТА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7299USNP/130022;
- заявка на патент США, озаглавленная «КОНСТРУКЦИИ ПРОВОДНИКОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ И ВРАЩАЮЩИМИСЯ КОНЦЕВЫМИ ЭФФЕКТОРАМИ», досье патентного поверенного № END7301USNP/130024;
- заявка на патент США, озаглавленная «СИСТЕМЫ ОБНАРУЖЕНИЯ КОНЦЕВОГО ЭФФЕКТОРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7302USNP/130025;
- заявка на патент США, озаглавленная «КОНСТРУКЦИИ ДЛЯ БЛОКИРОВКИ ПУСКОВОГО КРЮЧКА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», досье патентного поверенного № END7303USNP/130026;
- заявка на патент США, озаглавленная «ИНТЕРАКТИВНЫЕ ЭКРАНЫ», досье патентного поверенного № END7304USNP/130027; и
- заявка на патент США, озаглавленная «ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ЭЛЕКТРОПРИВОДОМ, ВЫПОЛНЕННЫЕ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА», досье патентного поверенного № END7305USNP/130028.
Для обеспечения полного понимания принципов работы, конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, приводится описание некоторых примеров осуществления. Один или более примеров данных вариантов осуществления показаны на сопроводительных рисунках. Обычным специалистам в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и проиллюстрированные на сопроводительных рисунках, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных вариантов осуществления настоящего изобретения определен только формулой изобретения. Особенности, показанные или описанные в связи с одним примером осуществления, можно комбинировать с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий»), «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. В результате, хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к части, лежащей ближе к врачу, а термин «дистальный» относится к части, удаленной от врача. Предлагается также для удобства и ясности применительно к рисункам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
При лапароскопических манипуляциях и хирургических операциях с минимальным вмешательством используются различные типичные приспособления и методы. Однако, специалисты в данной области смогут оценить по достоинству различные методы и приспособления, описанные в данном документе, которые могут быть использованы в многочисленных хирургических процедурах и сферах применения, включая, например, те, что связаны с открытыми хирургическими манипуляциями. Из настоящего подробного описания специалистам в данной области будет дополнительно понятно, что различные инструменты, описанные в настоящем документе, могут вставляться в тело любым способом, например, через естественное отверстие, через разрез или прокол, сформированный в ткани, и т.д. Рабочие участки или участки концевого эффектора инструментов могут вставляться непосредственно в тело или могут вставляться через устройство доступа, которое имеет рабочий канал, через который могут выдвигаться концевой эффектор и удлиненный ствол хирургического инструмента.
На ФИГ. 1 показан хирургический инструмент 10 с электропитанием, который во многом может быть аналогичен тем хирургическим инструментам (включая их различные элементы, компоненты и подкомпоненты), которые описаны, например, в публикации Zemlok ‘763 и/или Zemlok ‘344, каждая из которых полностью включена в настоящий документ путем ссылки. Хирургический инструмент 10, изображенный на ФИГ. 1, включает в себя корпус 12, который имеет участок 14 рукоятки для облегчения ручного манипулирования инструментом и его эксплуатации. Таким образом, термин «корпус», используемый в настоящем документе, может охватывать ручную или иную конструкцию, выполненную с возможностью ручного управления. Однако термин «корпус» может также охватывать участки автоматизированной системы хирургического инструмента, такой как роботизированная система, которая не предназначена для ручного применения, а управляется другим образом и выполнена с возможностью приведения в действие с помощью различных компонентов, участков и/или исполнительных механизмов системы.
Узел 16 удлиненного ствола в виде эндоскопического участка выступает из корпуса 12 и выполнен с возможностью функционального прикрепления хирургического концевого эффектора, сконструированного для выполнения, по меньшей мере, одного хирургического вмешательства в ответ на приложение к нему пусковых движений. Такие хирургические концевые эффекторы могут представлять собой, например, эндоскопические режущие инструменты, зажимы или другие устройства, которые могут включать в себя пару бранш, причем одна бранша выполнена с возможностью селективного перемещения относительно другой бранши, или в некоторых других конфигурациях обе бранши выполнены с возможностью перемещения относительно друг друга. В качестве дополнительного примера, хирургический концевой эффектор может представлять собой устройство, выполненное с возможностью разрезания и сшивания ткани скобками, такое как «загрузочный блок» 20, как показано на ФИГ. 2 и 3. Хирургические концевые эффекторы, такие как, например, загрузочный блок 20, могут быть прикреплены с возможностью высвобождения к узлу 16 удлиненного ствола хирургического инструмента 10 с электропитанием, как более подробно описано в настоящем документе.
На ФИГ. 2 и 3 показан один пример формы загрузочного блока 20, который можно использовать с хирургическим инструментом 10. Такой загрузочный блок 20 может быть аналогичен загрузочным блокам, описанным в вышеупомянутых публикациях заявок на патент США, каждая из которых полностью включена в настоящий документ путем ссылки, а также загрузочным блокам, описанным, например, в публикации заявки на патент США № US 2012-0298719-A1, озаглавленной «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ С ВРАЩАЮЩИМИСЯ КОНСТРУКЦИЯМИ ДЛЯ РАЗМЕЩЕНИЯ СКОБОК», полное описание которой включено в настоящий документ путем ссылки.
Как показано на ФИГ. 2, загрузочный блок 20 включает в себя узел 22 упора, который поддерживается с возможностью поворотного движения относительно носителя 24, функционально закрепляющего в нем кассету 26 со скобками. Сборочный узел 28 связан с возможностью поворота с носителем 24 кассеты с образованием шарнирного сочленения 27, которое позволяет носителю 24 поворачиваться вокруг оси AA-AA шарнирного поворота, расположенной поперечно к продольной оси LA-LA инструмента. Как показано на ФИГ. 3, сборочный узел 28 может включать в себя, например, верхний и нижний монтажные участки 30 и 32. Каждый монтажный участок 30, 32 может включать в себя резьбовое отверстие 34 на каждой своей стороне, имеющее соответствующие размеры для приема резьбовых болтов (не показаны) для закрепления на нем проксимального конца носителя 24. Пара размещенных в центре поворотных элементов 36 может проходить между верхним и нижним монтажными участками посредством пары соединительных элементов 38, которые входят в зацепление с дистальным концом участка 40 корпуса. Каждый из соединительных элементов 38 может включать в себя блокирующий проксимальный участок 39, который выполнен с возможностью приема в канавки 42, образованные в проксимальном конце участка 40 корпуса для удержания сборочного узла 30 и участка 40 корпуса в продольно зафиксированном положении.
Как дополнительно показано на ФИГ. 3, участок 40 корпуса загрузочного блока 20 может включать в себя верхнюю половину 44 корпуса и нижнюю половину 46 корпуса, каждая из которых выполнена с возможностью быть принятой внутрь наружного кожуха 50. Проксимальный конец половины 44 корпуса может включать в себя выступы 48 для зацепления, чтобы входить в зацепление с возможностью высвобождения с дистальным концом узла 16 удлиненного ствола. Выступы 48 могут, например, образовывать связь байонетного типа с дистальным концом узла 16 удлиненного ствола. Различные связывающие конструкции более подробно описаны в настоящем документе. Половины 44, 46 корпуса могут формировать канал 47 для приема с возможностью скольжения приводной штанги 60, выполненной с возможностью перемещения в осевом направлении. Второе шарнирное соединение 70 может иметь размеры для размещения с возможностью скольжения внутри паза 72, образованного между половинами 44, 46 корпуса. Пара пластин 74 «против выпячивания» может быть расположена смежно с дистальным концом участка 40 корпуса, смежно с дистальным концом осевой приводной штанги 60 для предотвращения выпячивания наружу приводной штанги 60 во время шарнирного поворота носителя 24.
Приводная штанга 60 может включать в себя дистальную рабочую головку 62 и проксимальную часть 64 зацепления. Приводная штанга 60 может быть сконструирована из одного листа материала или предпочтительно из множества сложенных стопкой листов. Часть 64 зацепления может включать в себя пару пальцев зацепления, имеющих размеры и сконфигурированных для сборочного зацепления с парой соответствующих удерживающих пазов, образованных в приводном элементе 66. Приводной элемент 66 может включать в себя проксимальное отверстие 67, которое выполнено с возможностью приема дистального конца пускового стержня при зацеплении проксимального конца загрузочного блока 20 с узлом удлиненного ствола хирургического инструмента 10. Дистальная рабочая головка 62 может иметь образованный на ней разрезающий ткань участок 63. Дистальная рабочая головка 62 может дополнительно включать в себя пару штифтов 65, выполненных с возможностью вхождения в зацепление с узлом 22 упора, чтобы поворачивать его в закрытое положения для зажатия ткани между упором 22 и кассетой 26 со скобками при приведении дистальной рабочей головки 62 в движение дистально через кассету 26 со скобками. Разрезающий ткань участок 63 на дистальной рабочей головке 62 служит для разрезания зажатой ткани при приведении известным способом хирургических скобок (не показаны), закрепленных в кассете 26 со скобками, в формирующий контакт с упором 22. Например, дистальная рабочая головка 62 выполнена с возможностью вхождения в зацепление в осевом направлении и выдвижения салазок (не показаны), закрепленных с возможностью передвижения в кассете 26 со скобками. При приведении салазок в движение в дистальном направлении приводным элементом 66 салазки контактируют с толкателями (не показаны), которые связаны со скобками, и воздействуют на толкатели таким образом, что те выталкивают скобки за пределы кассеты 26 в формирующее зацепление с упором 22 на загрузочном блоке 20.
Как показано на ФИГ. 1, хирургический инструмент 10 включает в себя двигатель 100, который выполнен с возможностью генерировать вращательные пусковые движения, которые можно использовать, например, для приложения пусковых движений к загрузочному блоку 20, как будет более подробно описано ниже. Например, по меньшей мере, в одной форме двигатель 100 выполнен с возможностью приложения вращательных пусковых движений к узлу пускового элемента, по существу обозначенного как элемент 82. Например, в одной конструкции узел 82 пускового элемента включает в себя приводную трубку 102, закрепленную с возможностью поворота внутри корпуса 12 и имеющую образованную в ней внутреннюю резьбу (не показана). Проксимальный резьбовой участок пускового стержня 104 закреплен в резьбовом зацеплении с приводной трубкой 102 так, что поворот приводной трубки 102 приводит к осевому перемещению пускового стержня 104. Пусковой стержень 104 может быть выполнен с возможностью резьбового взаимодействия с внутренней частью приводной штанги 60 в загрузочном блоке 20. Как более подробно описано в вышеупомянутой публикации Zemlok ‘763 и Zemlok ‘344, включенной в настоящий документ, поворот приводной трубки 102 в первом направлении (например, против часовой стрелки) заставляет пусковой стержень 104 выдвигать приводной элемент 60 в дистальном направлении. Начальное выдвижение приводного элемента 60 в дистальном направлении внутри загрузочного блока 20 приводит к повороту упора 22 к кассете 26 со скобками. Упор 22 активируется штифтами 65 на приводном элементе 60, которые служат для отведения упора 22 в закрытое положение при начальном приведении приводного элемента 60 в движение в дистальном направлении DD. Дополнительное дистальное поступательное перемещение пускового стержня 104 и, в конечном счете, приводного элемента 60 через загрузочный блок 20 вызывает приведение скобок в формирующий контакт с формирующей скобки нижней поверхностью упора 22.
Как дополнительно показано на ФИГ. 1, хирургический инструмент 10 может включать в себя систему шарнирного соединения, по существу обозначенную как элемент 109. Однако хирургический инструмент 10 может включать в себя различные другие конструкции системы шарнирного соединения, подробно описанные в настоящем документе. По меньшей мере, в одной форме система 109 шарнирного соединения может включать в себя механизм 110 шарнирного соединения, который включает в себя двигатель 112 шарнирного соединения и ручку 114 для ручного управления шарнирным соединением. Двигатель 112 шарнирного соединения можно активировать переключателем 116 шарнирного соединения с электропитанием или посредством поворота ручки 114 для ручного управления шарнирным соединением. Активация двигателя 112 шарнирного соединения служит для поворота зубчатого колеса 118 шарнирного соединения механизма 110 шарнирного соединения. Активация механизма 110 шарнирного соединения может вызывать перемещение концевого эффектора (например, участка кассеты/упора загрузочного блока 20) из его первого положения, в котором его ось по существу совмещена с продольной осью LA-LA инструмента, узла 16 удлиненного ствола, в положение, в котором ось концевого эффектора расположена под углом к продольной оси LA-LA инструмента, узла удлиненного ствола, например, около оси AA-AA шарнирного соединения. Дополнительное описание различных аспектов механизма 110 шарнирного соединения можно найти в публикации Zemlok ‘763, которая ранее была полностью включена в настоящий документ путем ссылки. Кроме того, в патенте США № 7,431,188, озаглавленном «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНЫМ СОЕДИНЕНИЕМ С ЭЛЕКТРОПИТАНИЕМ», полное описание которого включено в настоящий документ путем ссылки, описаны концевые эффекторы с электроприводом, выполненные с возможностью шарнирного поворота, которые можно использовать в связи с хирургическим инструментом 10.
В различных вариантах осуществления хирургический инструмент может включать в себя, по меньшей мере, один двигатель, который может прикладывать пусковые движения к загрузочному блоку 20 и/или движения шарнирного поворота к системе 109 шарнирного соединения, как более подробно описано в других разделах настоящего документа. Двигатель 100 может, например, обеспечиваться электропитанием от источника 200 электропитания такого типа, который более подробно описан в публикации Zemlok ‘763. Например, источник 200 электропитания может содержать перезаряжаемый аккумулятор (например, на основе свинца, на основе никеля, на основе ионов лития и т. п.). Также предполагается, что источник 200 электропитания может включать в себя, по меньшей мере, один одноразовый аккумулятор. Напряжение одноразового аккумулятора может, например, находиться в диапазоне от около 9 вольт до около 30 вольт. Однако могут использоваться и другие источники электропитания. На ФИГ. 1 показан один пример, в котором источник 200 электропитания включает в себя множество элементов 202 аккумулятора. Число используемых элементов 202 аккумулятора может зависеть от потребностей в токовой нагрузке инструмента 10.
В некоторых вариантах осуществления хирургический инструмент 10 может включать в себя вспомогательный источник электропитания для подачи электропитания на, по меньшей мере, один двигатель хирургического инструмента 10. Например, как показано на ФИГ. 129, хирургический инструмент 10 может включать в себя систему 2000 электропитания, которая может быть выполнена с возможностью обеспечения энергии для работы хирургического инструмента 10. Систему 2000 электропитания, как изображено на ФИГ. 129, можно разместить, например, в участке 14 рукоятки корпуса 12, и она может включать в себя основной источник 2002 электропитания и вспомогательный или резервный источник 2004 электропитания. Основной источник 2002 электропитания может быть выполнен с возможностью обеспечения энергией для работы хирургического инструмента 10 во время обычной работы, а вспомогательный источник 2004 электропитания может быть выполнен с возможностью обеспечения энергией для работы хирургического инструмента 10, по меньшей мере, с ограниченной мощностью, при невозможности основного источника 2002 электропитания обеспечить энергией работу хирургического инструмента 10, например, при истощении и/или отсоединении основного источника 2002 электропитания от хирургического инструмента 10. Например, вспомогательный источник 2002 электропитания может быть выполнен с возможностью обеспечения энергией для восстановления хирургического инструмента 10 до состояния по умолчанию в случае истощения и/или отсоединения основного источника 2002 электропитания от хирургического инструмента 10 во время хирургического вмешательства.
Как показано на ФИГ. 1 и более подробно описано в других разделах настоящего документа, источник электропитания, такой как, например, источник 200 электропитания, может подавать электропитание для работы хирургического инструмента 10. Например, источник 200 электропитания может подавать электропитание на двигатель, такой как, например, двигатель 100, чтобы вызвать поворот приводной трубки 102 в первом направлении и, в конечном счете, осевое выдвижение пускового стержня 104, который приводит в движение приводную штангу 60 дистально через загрузочный блок 20. Альтернативно источник 200 электропитания может подавать электропитание на двигатель 100, чтобы вызвать поворот приводной трубки 102 во втором направлении, противоположном первому направлению, и, в конечном счете, осевое втягивание пускового стержня 104, который может перемещать приводную штангу 60 проксимально в ее исходное положение и/или в положение по умолчанию. Аналогично основной источник 2002 электропитания может быть выполнен с возможностью подачи электропитания на двигатель 100 для выдвижения и/или втягивания пускового стержня 104 во время обычной работы хирургического инструмента 10. Кроме того, вспомогательный источник 2004 электропитания может быть выполнен с возможностью подачи электропитания, необходимого для втягивания пускового стержня 104 в положение по умолчанию, если основной источник 2002 электропитания не сможет обеспечить необходимое электропитание, например, при истощении и/или отсоединении основного источника 2002 электропитания от хирургического инструмента 10.
В дополнение к вышесказанному, как более подробно описано в других разделах настоящего документа, хирургический инструмент 10 может быть выполнен с возможностью регистрации и хранения разнообразной информации относительно работы хирургического инструмента 10 во время хирургического вмешательства, такой как, например, угол шарнирного поворота концевого эффектора 20 (см. ФИГ. 2), состояние активации концевого эффектора 20, показания датчиков, число запусков, толщина ткани и/или положение пускового стержня 104. В некоторых примерах такая информация может регистрироваться и храниться в энергозависимой или временной памяти, такой как, например, блок оперативного запоминающего устройства (ОЗУ), причем для поддержания и хранения информации в нем может требоваться электропитание. Во время обычной работы хирургического инструмента 10 основной источник 2002 электропитания, аналогичный другим источникам электропитания, более подробно описанным в других разделах настоящего документа, может подавать электропитание, необходимое для поддержания и хранения информации внутри блоков энергозависимой или временной памяти хирургического инструмента 10. Кроме того, вспомогательный источник 2004 электропитания может подавать электропитание, необходимое для временного поддержания хранящейся информации, в том случае, если основной источник 2002 электропитания не сможет подавать необходимое электропитание, например, при истощении и/или отсоединении основного источника 2002 электропитания от хирургического инструмента 10.
В некоторых аспектах хирургический инструмент 10 может включать в себя систему 2005 управления такого типа и конструкции, как описано в публикации Zemlok ‘763, которая была полностью включена в настоящий документ путем ссылки. В этой публикации можно найти дополнительные подробности относительно конструкции и работы такой системы 2005 управления. Например, система 2005 управления может быть выполнена с возможностью генерировать или предоставлять пользователю информацию, такую как предупреждение или сведения о состоянии инструмента, посредством пользовательского интерфейса, такого как визуальное или звуковое отображение. Сигналы или входные сигналы, генерируемые системой 2005 управления, могут, например, создаваться в ответ на другие сигналы или входные сигналы, обеспечиваемые пользователем, компонентами инструмента, либо они могут зависеть от одного или более измерений, связанных с инструментом 10. Во время обычной работы хирургического инструмента 10, как более подробно описано в других разделах настоящего документа, источник электропитания, такой как, например, основной источник 2002 электропитания (см. ФИГ. 129), может подавать электропитание, необходимое для выполнения системой 2005 управления ее функций, включая взаимодействие с пользователем через пользовательский интерфейс. Кроме того, вспомогательный источник 2004 электропитания может подавать электропитание, по меньшей мере, с ограниченной мощностью, необходимое для временного взаимодействия с пользователем через пользовательский интерфейс, в том случае, если основной источник 2002 электропитания не сможет подавать необходимое электропитание, например, при истощении и/или отсоединении основного источника 2002 электропитания от хирургического инструмента 10.
Как показано на ФИГ. 130, система 2000 электропитания может содержать схему 2006 управления электропитанием, которая может быть соединена с основным источником 2002 электропитания и вспомогательным источником 2004 электропитания. Схема 2006 управления электропитанием может включать в себя или может быть селективно связана с полупроводниковым элементом, компьютерной микросхемой или памятью. Схема 2006 управления электропитанием может быть выполнена с возможностью отправки аналоговых или цифровых входных сигналов или сигналов на различные компоненты хирургического инструмента 10, включая, без ограничений, систему 2005 управления, основной источник 2002 электропитания и/или вспомогательный 2004 источник электропитания, или получения от них сигналов. В различных аспектах в схеме 2006 управления электропитанием может использоваться программное обеспечение, в котором применяют один или более алгоритмов, чтобы дополнительного выражать в виде формулы входные сигналы для управления и отслеживания различных компонентов хирургического инструмента 10, включая основной источник 2002 электропитания и/или вспомогательный источник 2004 электропитания. Такие выраженные формулой входные сигналы могут зависеть от критериев, измеренных и/или рассчитанных схемой 2006 управления электропитанием или в некоторых случаях предоставленных схеме 2006 управления электропитанием другим компонентом инструмента, пользователем или отдельной системой, находящейся в функциональной связи со схемой 2006 управления электропитанием.
Как показано на ФИГ. 129, основной источник 2002 электропитания может содержать один или более элементов аккумулятора в зависимости от потребностей в токовой нагрузке инструмента 10. В различных аспектах, как показано на ФИГ. 129, основной источник 2002 электропитания может включать в себя аккумуляторную батарею 2008, которая может включать в себя множество элементов 2010 аккумулятора, которые, например, могут быть соединены друг с другом последовательно. Аккумуляторная батарея 2008 может быть сменной. Иными словами, аккумуляторную батарею 2008 можно отсоединить и удалить из хирургического инструмента 10 и заменить другой аналогичной аккумуляторной батареей. В некоторых аспектах основной источник 2002 электропитания может содержать перезаряжаемый аккумулятор (например, на основе свинца, на основе никеля, на основе ионов лития и т. п.). Элементы 2008 аккумулятора могут представлять собой, например, 3-вольтные литиевые элементы аккумулятора, такие как элементы CR 123A аккумулятора, хотя в других вариантах осуществления, например, могут применяться другие типы элементов аккумулятора, такие как, например, элементы аккумулятора с разными уровнями напряжения и/или разными химическими веществами. Пользователь может отсоединить и удалить истощенную или использованную аккумуляторную батарею 2008 из хирургического инструмента 10 и подключить заряженную аккумуляторную батарею 2008 для электропитания хирургического инструмента 10. Истощенную аккумуляторную батарею 2008 впоследствии можно зарядить и использовать повторно. Также предполагается, что основной источник 2002 электропитания может включать в себя, по меньшей мере, один одноразовый аккумулятор. В различных аспектах напряжение одноразового аккумулятора может, например, находиться в диапазоне от около 9 вольт до около 30 вольт. Пользователь может отсоединить и удалить истощенную одноразовую аккумуляторную батарею 2008 и подключить новую одноразовую аккумуляторную батарею 2008 для электропитания хирургического инструмента 10.
Как описано выше, аккумуляторная батарея 2008 может включать в себя перезаряжаемые элементы аккумулятора и может быть съемно размещена, например, внутри участка 14 рукоятки корпуса 12. В таких обстоятельствах аккумуляторную батарею 2008 можно зарядить с использованием базы зарядного устройства. Например, как показано на ФИГ. 131, база 2012 зарядного устройства может быть соединена с аккумуляторной батареей 2008 посредством удаления аккумуляторной батареи 2008 из ее месторасположения в участке 14 рукоятки и соединения ее с базой 2012 зарядного устройства. Как показано на ФИГ. 131, база 2012 зарядного устройства может содержать источник 2014 электропитания для зарядки аккумуляторной батареи 2008. Источник 2014 электропитания базы 2012 зарядного устройства может представлять собой, например, аккумулятор (или ряд последовательно соединенных аккумуляторов) или выпрямитель, который преобразует переменный ток, например, от сети электропитания, в постоянный ток, или любой другой подходящий источник электропитания для зарядки аккумуляторной батареи 2008. База 2012 зарядного устройства также может содержать индикаторные устройства, такие как светодиоды, ЖК-экран и т. п., чтобы показывать состояние зарядки аккумуляторной батареи 2008.
Кроме того, как показано на ФИГ. 131, база 2012 зарядного устройства может содержать, например, один или более процессоров 2016, один или более блоков 2018 памяти и интерфейсов 2020, 2022 ввода-вывода. Через первый интерфейс 2020 ввода-вывода база 2012 зарядного устройства может быть связана с блоком 2008 питания (посредством интерфейса ввода-вывода блока питания), чтобы позволить, например, загрузку данных, хранящихся в памяти блока 2008 питания, в память 2020 базы 2012 зарядного устройства. В различных обстоятельствах загруженные данные затем можно загрузить на другое компьютерное устройство посредством второго интерфейса 2022 ввода-вывода для оценки и анализа, например, в больничной системе, в которой выполняется операция с применением инструмента 10, в кабинете хирурга, дистрибьютором инструмента, производителем инструмента и т. п.
База 2012 зарядного устройства также может содержать измеритель 2024 заряда для измерения заряда элементов аккумулятора аккумуляторной батареи 2008. Измеритель 2024 заряда может обмениваться данными с процессором 2016 так, что процессор 2016 может определять в режиме реального времени пригодность аккумуляторной батареи 2008 для применения с обеспечением ожидаемой производительности аккумулятора.
Как показано на ФИГ. 129, вспомогательный источник 2004 электропитания может содержать один или более элементов 2026 аккумулятора, которые могут располагаться, например, внутри участка 14 рукоятки. Элемент 2026 аккумулятора может быть перезаряжаемым (например, на основе свинца, на основе никеля, на основе ионов лития и т. п.). Например, элемент 2026 аккумулятора может представлять собой 3-вольтный литиевый элемент аккумулятора, такой как элемент CR 123A аккумулятора. Кроме того, элемент 2026 аккумулятора может быть выполнен с возможностью подзарядки без удаления из инструмента 10. Например, основной источник 2002 электропитания можно использовать для зарядки элемента 2026 аккумулятора при соединении основного источника 2002 электропитания с инструментом 10.
На ФИГ. 132 показан пример осуществления схемы 2006 управления электропитанием. В числе прочего, схема 2006 управления электропитанием может быть выполнена с возможностью отслеживания электрических параметров, связанных с работой основного источника 2002 электропитания и/или вспомогательного источника 2004 электропитания. Например, схема 2006 управления электропитанием может быть выполнена с возможностью отслеживания уровней электроэнергии в основном источнике 2002 электропитания и/или вспомогательном источнике 2004 электропитания. Схема 2006 управления электропитанием, как показано на ФИГ. 132, может содержать измеритель 2028 заряда, который может быть выполнен с возможностью измерения заряда основного источника 2002 электропитания и/или вспомогательного 2004 источника электропитания. Схема 2006 управления электропитанием также может содержать энергонезависимую память 2030, такую как, например, флеш-память или ПЗУ, и один или более процессоров 2032. Процессор 2032 может быть соединен с памятью 2030 и может управлять ей. Кроме того, процессор 2032 может быть соединен с измерителем 2028 заряда, чтобы считывать показания и иным образом управлять измерителем 2028 заряда. Кроме того, процессор 2032 может управлять выходными устройствами схемы 2006 управления электропитанием, такими как, например, светодиоды.
Читателю станет понятно, что измерители 2024 и/или 2028 заряда могут быть выполнены с возможностью измерения напряжения, заряда, сопротивления и/или силы тока. В некоторых примерах измерители 2024 и/или 2028 заряда могут содержать схему измерения емкости аккумулятора, которая может быть выполнена с возможностью измерения состояния напряжения при заданном заряде.
В дополнение к вышесказанному, процессор 2032 может хранить информацию об основном источнике 2002 электропитания и/или вспомогательном источнике 2004 электропитания в памяти 2030. Информация может включать в себя, в числе прочего, доступный полный заряд, количество применений и/или рабочие характеристики. Дополнительно, информация, хранящаяся в памяти 2030, может содержать значения ID основного источника 2002 электропитания, которые могут считываться и храниться в схеме 2006 управления электропитанием. Такие ID могут представлять собой, например, радиочастотные метки (RFID), которые считываются схемой 2006 управления электропитанием посредством RFID-транспондера 2034. RFID-транспондер 2034 может считывать RFID с источников электропитания, которые включают в себя RFID-метки. Значения ID могут считываться, храниться в памяти 2030 и сравниваться процессором 2032 со списком допустимых значений ID, хранящихся в памяти 2030 или в ином запоминающем устройстве, связанном со схемой 2006 управления электропитанием, чтобы определить, например, является ли съемный/сменный основной источник 2002 электропитания, связанный со считанным значением ID, подлинным и/или подходящим. В таких обстоятельствах, если процессор 2032 определяет, что съемный/сменный компонент, связанный со считанным значением ID, не является подлинным, схема 2006 управления электропитанием может быть выполнена с возможностью предотвращения применения инструмента 10, например, путем размыкания переключателя (не показан), что приведет к прекращению подачи электропитания на инструмент 10. Различные параметры, которые процессор 2032 может оценивать для определения того, является ли компонент подлинным и/или подходящим, включают в себя, например, код даты; модель/тип компонента, информацию о производителе, информацию о регионе и/или предшествующие коды ошибок.
В дополнение к вышесказанному, схема 2006 управления электропитанием может также содержать интерфейс 2036 ввода-вывода для связи с другим устройством, например, компьютером, чтобы позволить загрузку данных, хранящихся в памяти 2030, на другое устройство для оценки и анализа, например, в больничной системе, в которой выполняется операция с применением инструмента 10, в кабинете хирурга, дистрибьютором инструмента и/или производителем инструмента. Интерфейс 2036 ввода-вывода может представлять собой, например, проводной или беспроводной интерфейс.
Как показано на блок-схеме, изображенной на ФИГ. 133, схема 2006 управления электропитанием может селективно передавать электропитание от основного источника 2002 электропитания и вспомогательного источника 2004 электропитания на хирургический инструмент 10. Например, процессор 2032 может быть запрограммирован для обеспечения передачи электропитания на инструмент 10 от основного источника 2002 электропитания, когда основной источник 2002 электропитания может снабжать инструмент 10 электроэнергией, и от вспомогательного источника 2004 электропитания, когда основной источник 2002 электропитания не может снабжать инструмент 10 электроэнергией.
Во время обычной работы инструмента 10 процессор 2032 после обнаружения и определения подлинности основного аккумуляторного источника 2002, как описано выше, может обеспечивать снабжение инструмента 10 электроэнергией от основного источника 2002 электропитания. Основной источник 2002 электропитания может продолжать электропитание инструмента 10 до тех пор, пока заряд основного источника 2002 электропитания не достигнет заданного уровня минимального заряда или не опустится ниже него, например, когда основной источник 2002 электропитания будет отсоединен и/или истощен. Схему 2006 управления электропитанием можно использовать для определения того, когда заряд основного источника 2002 электропитания достигнет заданного уровня минимального заряда или опустится ниже него. Например, процессор 2032 может быть выполнен с возможностью использования измерителя 2028 заряда или другого аналогичного измерителя заряда для отслеживания уровня заряда основного источника 2002 электропитания и обнаружения того, когда уровень заряда достигнет заданного минимального уровня, который может храниться в памяти 2030 схемы 2006 управления электропитанием, или опустится ниже него. В этот момент процессор 2032 может уведомлять пользователя о необходимости замены основного источника 2002 электропитания. Схема 2006 управления электропитанием может включать в себя индикатор, такой как один или более светодиодов, ЖК-экран, например, который активируется, чтобы уведомить пользователя инструмента 10 о необходимости замены основного источника 2002 электропитания. Кроме того, процессор 2032 может быть выполнен с возможностью переключения электропитания инструмента 10 с основного источника 2002 электропитания на вспомогательный источник 2004 электропитания после обнаружения того, что уровень заряда основного источника 2002 электропитания достиг заданного минимального уровня или опустился ниже него. Читателю станет понятно, что для обеспечения пользователя дополнительной обратной связью могут использоваться дополнительные индикаторы. Например, можно использовать индикатор для уведомления пользователя о том, что инструмент 10 переключается с основного источника 2002 электропитания на вспомогательный источник 2004 электропитания и наоборот.
В дополнение к вышесказанному, процессор 2032 может быть запрограммирован для обеспечения заряда вспомогательного источника 2004 электропитания от основного источника 2002 электропитания, когда основной источник 2002 электропитания соединен с хирургическим инструментом 10. В некоторых примерах после полной зарядки от основного источника 2002 электропитания до заданного максимального уровня заряда вспомогательный источник 2004 электропитания может не использоваться до тех пор, пока основной источник 2002 электропитания может обеспечивать инструмент 10 электропитанием. Кроме того, схема 2006 управления электропитанием может использоваться для определения достаточного уровня заряда вспомогательного источника 2004 электропитания. Например, процессор 2032 может быть выполнен с возможностью использования измерителя 2028 заряда для отслеживания уровня заряда вспомогательного источника 2004 электропитания до тех пор, пока уровень заряда не достигнет заданного максимального уровня, который может храниться в памяти 2030 схемы 2006 управления электропитанием, причем в этот момент процессор 2032 может остановить зарядку вспомогательного источника 2004 электропитания от основного источника 2002 электропитания. Схема 2006 управления электропитанием может включать в себя индикатор, такой как один или более светодиодов, ЖК-экран и т. п., который может активироваться, чтобы уведомить пользователя инструмента 10 о достаточном уровне заряда вспомогательного источника 2004 электропитания.
Как показано на ФИГ. 129, основной источник 2002 электропитания может быть вмонтирован в корпус внутри камеры 2038 участка 14 рукоятки инструмента 10. Для замены основного источника 2002 электропитания можно убрать наружную оболочку участка 14 рукоятки для обнажения камеры 2038. В некоторых примерах спусковой механизм или переключатель может быть связан с наружной оболочкой участка 14 рукоятки так, что попытка убрать наружную оболочку участка 14 рукоятки может восприниматься процессором 2032 как событие запуска переключения от основного источника 2002 электропитания на вспомогательный источник 2004 электропитания.
После замены основного источника 2002 электропитания хирургического инструмента 10 новым основным источником 2002 электропитания схема 2006 управления электропитанием может проверить подлинность нового основного источника 2002 электропитания, как описано выше, и после подтверждения подлинности схема 2006 управления электропитанием может обеспечивать передачу электроэнергии от нового основного источника 2002 электропитания на инструмент 10. Кроме того, основной источник 2002 электропитания может заряжать вспомогательный источник 2004 электропитания, как описано выше.
Хирургические концевые эффекторы, такие как, например, загрузочный блок 20 (ФИГ. 2 и 3), могут быть функционально связаны с узлом 16 удлиненного ствола хирургического инструмента 10 с электропитанием (ФИГ. 1). Например, как показано на ФИГ. 38-58, хирургический концевой эффектор, такой как, например, одноразовый загрузочный блок (ОЗБ) 5502, может быть прикреплен с возможностью высвобождения к хирургическому инструменту, такому как, например, хирургический инструмент 10 с электропитанием (ФИГ. 1). В различных вариантах осуществления хирургический инструмент может включать в себя ствол 5520, который может, например, взаимодействовать с ОЗБ 5502. В различных вариантах осуществления манжета, такая как, например, вращающаяся манжета 5580, может блокировать ОЗБ 5502 с возможностью высвобождения относительно ствола 5520. Кроме того, в различных вариантах осуществления поворот манжеты 5580 может облегчать прикрепление и/или совмещение пускового узла и/или шарнирного узла, как описано в настоящем документе.
В различных вариантах осуществления ОЗБ 5502 может включать в себя дистальный участок 5504 крепления, а ствол 5520 может включать в себя наружную трубку 5554 и проксимальный участок 5522 крепления. Дистальный участок 5504 крепления ОЗБ 5502 может принимать проксимальный участок 5522 крепления ствола 5520 при присоединении ОЗБ 5502 к стволу 5520 (ФИГ. 39). Кроме того, вращающаяся манжета 5580 может быть расположена вокруг проксимального участка 5522 крепления ствола 5520 так, что дистальный участок 5504 крепления ОЗБ 5502 также может располагаться внутри вращающейся манжеты 5580. Вращающаяся манжета 5580 может быть присоединена к стволу 5502 и/или к проксимальному участку 5504 крепления и в некоторых вариантах осуществления, например, может быть зафиксирована с возможностью поворота на проксимальном участке 5504 крепления ствола 5502. В некоторых вариантах осуществления проксимальный участок крепления ствола 5520 может принимать дистальный участок крепления ОЗБ 5502 при присоединении ОЗБ 5502 к стволу 5520. Кроме того, в некоторых вариантах осуществления манжета 5580 может быть зафиксирована с возможностью поворота на ОЗБ 5502.
На ФИГ. 38-58 показано, что при перемещении ОЗБ 5502 между неприкрепленным положением и прикрепленным положением относительно ствола 5520 хирургического инструмента ОЗБ 5502 может поступательно перемещаться вдоль продольной оси, определенной стволом 5520. Дистальный участок 5504 крепления ОЗБ 5502 может быть вставлен в проксимальный участок 5522 крепления ствола 5520 при перемещении ОЗБ 5502 из неприкрепленного положения в прикрепленное положение. Например, ОЗБ 5502 может поступательно перемещаться в направлении A (ФИГ. 39) при перемещении ОЗБ 5502 между неприкрепленным положением и прикрепленным положением. В некоторых вариантах осуществления зацепление канавки-и-паза между дистальным участком 5504 крепления и проксимальным участком 5522 крепления может направлять ОЗБ 5502 вдоль продольной оси, определенной стволом 5520. Как преимущественно показано на ФИГ. 42, дистальный участок 5504 крепления может включать в себя направляющий рельс 5514. Кроме того, как преимущественно показано на ФИГ. 44, проксимальный участок 5522 крепления может включать в себя направляющий паз 5534. Направляющий паз 5534 может иметь такие размеры и конструкцию, чтобы принимать и направлять направляющий рельс 5514 при вставке проксимального участка 5504 крепления ОЗБ 5502 в дистальный участок 5522 крепления ствола 5520. Направляющий паз 5534 может представлять собой, например, продольный паз, а направляющий рельс 5514 может представлять собой, например, продольное ребро. В некоторых вариантах осуществления направляющий паз 5534 и направляющий рельс 5514 могут предотвращать скручивание и/или вращение ОЗБ 5502 относительно продольной оси, определенной стволом 5520.
Как показано преимущественно на ФИГ. 38, дистальный участок 5504 крепления может включать в себя первую установочную метку 5510, например, такую как первая стрелка, и ствол 5520 и/или манжета 5580 могут включать в себя вторую установочную метку 5590, например, такую как вторая стрелка. Совмещение первой и второй установочных меток 5510, 5590 может обеспечивать совмещение направляющего рельса 5514 и направляющего паза 5534, что может упростить соединение дистального участка 5504 крепления с проксимальным участком 5522 крепления. Как описано в настоящем документе, поступательное перемещение ОЗБ 5502 вдоль продольной траектории к стволу 5520 может фиксировать ОЗБ 5502 с возможностью высвобождения относительно ствола 5520. В таких вариантах осуществления нет необходимости в повороте ОЗБ 5502 относительно ствола 5520 для фиксации ОЗБ 5502 относительно ствола 5520. Фактически, поворот ОЗБ 5502 относительно ствола 5520 может ограничиваться и/или предотвращаться зацеплением канавки-и-паза между проксимальным участком 5522 крепления и дистальным участком 5504 крепления, как описано в настоящем документе. В различных вариантах осуществления манжета 5580 может поворачиваться относительно ОЗБ 5502 и/или ствола 5520, чтобы фиксировать ОЗБ 5502 с возможностью высвобождения на стволе 5520. Например, как описано в настоящем документе, манжета 5580 может поворачиваться из своего исходного положения (ФИГ. 53) ко второму положению (ФИГ. 54), а затем возвращаться к исходному положению (ФИГ. 57), чтобы фиксировать ОЗБ 5502 на стволе 5520.
Как показано преимущественно на ФИГ. 42 и 43, проксимальный участок 5504 элемента ОЗБ 5502 может включать в себя поворотный ключ или ребро 5506. При перемещении ОЗБ 5502 в направлении А (ФИГ. 39) между неприкрепленным положением (ФИГ. 38) и прикрепленным положением (ФИГ. 39) поворотный ключ 5506 может влиять на поворот манжеты 5580. Например, поворотный ключ 5506 может поворачиваться и/или смещать манжету 5580 в направлении В (ФИГ. 39) от исходного положения во второе положение. Дистальный участок 5504 крепления может вводиться в проксимальный участок 5522 крепления, если манжета 5580 смещена во второе положение. Более того, при полном введении дистального участка 5504 крепления в проксимальный участок 5522 крепления поворотный ключ 5506 может допускать поворот манжеты 5580 в направлении С (ФИГ. 39) из второго положения в исходное положение. Направление С может быть, например, противоположно направлению В. Как описано в настоящем документе, при возврате манжеты 5580 в исходное положение манжета 5580 может блокировать дистальный участок 5504 крепления относительно проксимального участка 5522 крепления. Как показано на ФИГ. 42 и 43, поворотный ключ 5506 может включать в себя поворотный скос 5508 на своем проксимальном конце. Поворотный скос 5508 может входить в зацепление с элементом ствола 5520, чтобы, например, влиять на поворот вращающейся манжеты 5580.
В различных вариантах осуществления поворотный скос 5508 может влиять на поворот пускового ствола 5540, расположенного внутри ствола 5520. Например, как показано преимущественно на ФИГ. 47-50, пусковой ствол 5540 может включать в себя вращатель 5544 пускового ствола, который может проходить радиально наружу от пускового ствола 5540. Поворотный скос 5508 поворотного ключа 5506 может входить в зацепление с вращателем 5544 поворотного ствола при введении ОЗБ 5502 в ствол 5520. В различных вариантах осуществления поворотный скос 5508 может обеспечивать поворот вращателя 5544 пускового ствола, который может поворачивать пусковой ствол 5540. Например, пусковой ствол 5540 и вращатель 5544 пускового ствола могут поворачиваться в направлении В (ФИГ. 54) между первым положением (ФИГ. 53) и вторым положением (ФИГ. 54). Как показано на ФИГ. 47-50, пусковой ствол 5540 может входить в зацепление с вращающейся манжетой 5580. Например, вращающаяся манжета 5580 может включать в себя канавку 5584 вращателя, конфигурация и размеры которой позволяют принимать и/или удерживать вращатель пускового 5544 ствола. Вращатель 5544 пускового ствола может удерживаться канавкой 5584 вращателя так, что поворот вращателя 5544 пускового ствола вызывает поворот вращающейся манжеты 5580. В таких вариантах осуществления введение ОЗБ 5502 в ствол 5520 может влиять на поворот вращающейся манжеты 5580 в направлении В (ФИГ. 54), например, посредством поворота вращателя 5544 пускового ствола в направлении В.
Как показано преимущественно на ФИГ. 44 и 45, проксимальный участок 5522 крепления может включать в себя паз 5524 поворотного ключа, в который может входить поворотный ключ 5506 при введении дистального участка 5504 крепления в проксимальный участок 5522 крепления. В некоторых вариантах осуществления паз 5524 поворотного ключа может включать в себя зазорный вырез 5526 для приема вращателя 5544 пускового ствола. Например, поворотный скос 5508 на проксимальном конце поворотного ключа 5506 может поворачивать вращатель 5544 пускового ствола во второе положение и вводить его в зазорный вырез 5526 (ФИГ. 54). Поворотный ключ 5506 может продолжать перемещаться вдоль паза 5524 поворотного ключа при введении ОЗБ 5502 в ствол 5520. Также, по мере того как дистальный конец 5509 поворотного ключа 5506 проходит вращатель 5544 пускового ствола, вращатель 5544 пускового ствола может поворачиваться обратно в первое положение (ФИГ. 58), при этом может происходить соответствующий поворот вращающейся манжеты 5580 обратно в ее исходное положение.
В различных вариантах осуществления вращающаяся манжета 5580 может смещаться в исходное положение относительно ствола 5520 и/или проксимального участка 5522 крепления. Например, пружина 5592 может сдвигать блокирующую манжету 5580 в исходное положение. Пружина 5592 может включать в себя проксимальный конец 5594, который может быть закреплен относительно ствола 5520, и дистальный конец 5596, который может быть закреплен относительно манжеты 5580. Например, проксимальный конец 5594 пружины 5592 может быть закреплен в проксимальном пазу 5538 пружины (ФИГ. 51) ствола 5520, а дистальный конец 5596 пружины 5592, например, может быть закреплен в дистальном пазу 5588 пружины (ФИГ. 46) вращающейся манжеты 5580. В таких вариантах осуществления при повороте манжеты 5580 может происходить смещение дистального конца 5596 пружины 5592 относительно проксимального конца 5594 пружины 5592, которое приводит к формированию торсионной силы. Соответственно, манжета 5580 может противодействовать повороту из исходного положения во второе положение, и при повороте манжеты во второе положение пружина 5592 может возвращать манжету 5580 в исходное положение. Поскольку вращатель 5544 пускового ствола находится в зацеплении с манжетой 5580, пружина 5592 может также сдвигать пусковой ствол 5540 к его первому положению.
В различных вариантах осуществления вращающаяся манжета 5580 может включать в себя блокирующий фиксатор 5582, который фиксирует ОЗБ 5502 с возможностью высвобождения на стволе 5520. Как показано преимущественно на ФИГ. 46, блокирующий фиксатор 5582 может проходить радиально внутрь от внутреннего периметра вращающейся манжеты 5580. В различных вариантах осуществления блокирующий фиксатор 5582 может проходить в паз 5536 фиксатора (ФИГ. 44) в проксимальном участке 5522 крепления. Как показано преимущественно на ФИГ. 44, паз 5536 фиксатора может образовывать вырез в направляющем пазу 5534. В различных вариантах осуществления паз 5536 фиксатора может проходить от направляющего паза 5534 и может быть, например, перпендикулярен или по существу перпендикулярен направляющему пазу 5534. Кроме того, блокирующий фиксатор 5582 может перемещаться вдоль паза 5536 фиксатора при повороте вращающейся манжеты 5580 между исходным положением и вторым положением относительно ствола 5520.
В различных вариантах осуществления блокирующий фиксатор 5582 может входить в зацепление с дистальным участком 5504 крепления ОЗБ 5502, чтобы фиксировать ОЗБ 5502 относительно ствола 5520. Например, как показано на ФИГ. 42, дистальный участок 5504 крепления может включать в себя направляющий рельс 5514, который может иметь образованные на нем блокирующий вырез 5516. Форма и размеры блокирующего выреза 5516 могут обеспечивать прием блокирующего фиксатора 5582 вращающейся манжеты 5580 при полном введении ОЗБ 5502 в проксимальный участок 5522 крепления. Например, при полном введении дистального участка 5504 крепления в проксимальный участок 5522 крепления блокирующий вырез 5516 дистального участка 5504 крепления может совмещаться с пазом 5536 фиксатора проксимального участка 5522 крепления. Соответственно, блокирующий фиксатор 5582 может перемещаться вдоль паза 5536 фиксатора в проксимальном участке 5522 крепления и входить в блокирующий вырез 5516 в дистальном участке крепления. Более того, блокирующий фиксатор 5582 может смещаться к зацеплению с блокирующим вырезом 5516 под воздействием торсионной пружины 5592. Например, после того как вращатель 5544 пускового ствола освобождает дистальный конец 5509 поворотного ключа 5506, пусковой ствол 5540 может возвращаться в первое положение, вращающаяся манжета 5580 может возвращаться в исходное положение под воздействием торсионной пружины 5592. Более того, если манжета 5580 поворачивается из второго положения, возвращаясь в исходное положение, ее блокирующий фиксатор 5582 может совмещаться и входить в зацепление с блокирующим вырезом 5516 в направляющем рельсе 5514.
В различных вариантах осуществления поворот манжеты 5580 может упростить соединение и/или совмещение пускового узла. Например, пусковой ствол 5540 может проходить между проксимальным концом 5546 и дистальным концом 5542. Проксимальный конец 5546 может иметь поворотное соединение, которое может обеспечивать поворот пускового ствола 5540 между первой конфигурацией и второй конфигурацией. Кроме того, дистальный конец 5542 может иметь соединительную муфту для соединения режущего элемента ОЗБ 5502. Поворот пускового ствола 5540 может облегчать соединение режущего элемента. Например, при повороте соединительной муфты на дистальном конце 5542 пускового ствола 5540 соединительная муфта может входить в зацепление и соединяться с режущим элементом в ОЗБ 5502. В некоторых вариантах осуществления соединительная муфта может включать в себя байонетную оправу, которая может входить в зацепление с соответствующей розеткой байонетного разъема на режущем элементе в ОЗБ 5502. Как показано преимущественно на ФИГ. 40 и 41, пусковой узел может дополнительно включать в себя гильзу 5550, в которую входит пусковой ствол 5540, например, между проксимальным концом 5546 и дистальным концом 5542.
В различных вариантах осуществления при повороте пускового ствола 5540 внутри ствола 5520 пусковой ствол 5540 может совмещаться с пазом 5518 пускового ствола в ОЗБ 5502. Например, вращатель пускового стержня 5544 может совмещаться с пазом 5518 пускового ствола при полностью введенном ОЗБ 5502 и соединенном со стволом 5520. Однако в различных вариантах осуществления, если ОЗБ 5502 лишь частично введен в ствол 5520, вращатель 5544 пускового ствола может поворачиваться посредством поворотного ключа 5506, с выходом из паза 5518 пускового ствола. Иными словами, вращатель 5544 пускового ствола может совмещаться с пазом 5514 пускового ствола, если пусковой ствол 5540 находится в первом положении, и может разобщаться с пазом 5514 пускового ствола, если пусковой ствол 5540 поворачивается ко второму положению. В таких вариантах осуществления, если ОЗБ 5502 лишь частично введен в ствол 5520, и/или прежде чем ОЗБ 5502 закрепляется на стволе 5520 с возможностью высвобождения с помощью вращающейся манжеты 5580, пусковой путь вращателя 5544 пускового ствола может блокироваться дистальным участком 5504 крепления. Соединение пускового ствола 5540 и манжеты 5580 может обеспечивать надежное крепление ОЗБ 5502 к стволу 5520, прежде чем пусковой ствол 5540 может срабатывать и/или продвигаться вперед. Например, хирургический инструмент не сможет срабатывать до тех пор, пока режущий элемент в ОЗБ 5502 не будет связан с пусковым стволом 5540, и/или, например, до тех пор, пока пусковой ствол 5540 не будет надлежащим образом совмещен со стволом 5520.
В определенных вариантах осуществления поворот манжеты 5580 может упростить соединение и/или совмещение шарнирного узла 5559. Как показано преимущественно на ФИГ. 40 и 41, шарнирный узел 5559 может включать в себя проксимальную шарнирную рейку 5560, дистальную шарнирную рейку 5562 и шарнирный соединитель 5566. Кроме того, ствол 5520 может включать в себя паз 5528 проксимальной шарнирной рейки шарнира, а ОЗБ 5502 может включать в себя, например, дистальную шарнирную рейку 5512. В некоторых вариантах осуществления проксимальная шарнирная рейка 5560 может совмещаться с пазом 5528 проксимальной шарнирной рейки, а дистальная шарнирная рейка 5562 может совмещаться с пазом 5512 дистальной шарнирной рейки. Как показано на ФИГ. 46, шарнирный соединитель 5566 может находиться внутри вращающейся манжеты 5580. Например, вращающаяся манжета 5580 может включать в себя паз 5586 шарнирного соединителя, а шарнирный соединитель 5566 может располагаться внутри нее с возможностью перемещения.
В различных вариантах осуществления, как показано на ФИГ. 40 и 41, проксимальная рейка 5560 шарнира может иметь проксимальный вырез 5572, а дистальная рейка 5562 шарнира может иметь дистальный вырез 5574. Более того, шарнирный соединитель 5566 может включать в себя проксимальный шарнирный зацеп 5568 и дистальный шарнирный зацеп 5572. Проксимальный шарнирный зацеп 5568 выполнен с возможностью фиксации в проксимальном вырезе 5572 проксимальной шарнирной рейки 5560. В некоторых вариантах осуществления дистальный шарнирный зацеп 5570 может функционально входить в зацепление с дистальным вырезом 5574 дистальной шарнирной рейки 5562. Как описано в настоящем документе, вращающаяся манжета 5580 может поворачиваться между исходной конфигурацией и второй конфигурацией. При повороте манжеты 5580 шарнирный соединитель 5566, расположенный внутри нее, также может поворачиваться относительно продольной оси, определяемой стволом 5520. В различных вариантах осуществления проксимальный шарнирный зацеп 5568 шарнирного соединителя 5566 может оставаться фиксированным в проксимальном вырезе 5572 проксимальной шарнирной рейки 5560 при повороте шарнирного соединителя 5566. Более того, дистальный шарнирный зацеп 5570 шарнирного соединителя 5566 может перемещаться в зацепление с дистальным вырезом 5574 дистальной шарнирной рейки 5562 при повороте шарнирного соединителя 5566 с манжетой 5580 из второй положения в исходное положение. Например, при полном введении ОЗБ 5502 в ствол 5508 дистальный вырез 5574 дистальной шарнирной рейки 5562 может совмещаться с дистальным шарнирным зацепом 5568 шарнирного соединителя 5566. В таких вариантах осуществления, если вращающаяся манжета 5580 вращается с возвратом в исходную конфигурацию, дистальный шарнирный зацеп 5568 может входить в дистальный вырез 5574 дистальной шарнирной рейки 5562. Для полной сборки шарнирного узла 5559 необходимо, чтобы дистальный шарнирный вырез 5568 был расположен в дистальном вырезе 5574.
Как показано преимущественно на ФИГ. 45, в различных вариантах осуществления паз 5528 проксимальной шарнирной рейки может включать в себя первый просвет 5530 и второй просвет 5532. Проксимальный и дистальный шарнирный зацепы 5568, 5570 шарнирного соединителя 5566 могут входить в первый и второй просветы 5530, 5532 соответственно. В некоторых вариантах осуществления первый и второй просветы 5530, 5532 могут обеспечивать пространство для перемещения проксимального и дистального шарнирного зацепов 5568, 5570 при повороте манжеты 5580 и/или, например, шарнирного поворота шарнирного узла 5559.
Как показано на ФИГ. 51-58, для соединения ОЗБ 5502 со стволом 5520 хирургического инструмента пользователь может совместить установочную метку 5510 ОЗБ 5502 с установочной меткой 5590 ствола 5520 и/или манжеты 5580 (ФИГ. 51). Сохраняя совмещение установочных меток 5510, 5590, пользователь может перемещать ОЗБ 5502 относительно ствола 5520 вдоль продольной оси, определяемой стволом 5520. Пользователь может перемещать ОЗБ 5502 по прямой или по существу прямой траектории, и в различных вариантах осуществления нет необходимости, например, в повороте ОЗБ относительно ствола 5520. Как показано преимущественно на ФИГ. 53, ОЗБ 5502 может продолжать поступательное перемещение относительно ствола 5520, и направляющий рельс 5514 дистального участка 5504 крепления может входить в направляющий паз 5534 (ФИГ. 44) в проксимальном участке 5522 крепления ствола 5520. По мере перемещения дистального участка 5504 крепления в проксимальный участок 5522 крепления направляющий паз 5534 может направлять направляющий рельс 5514 и может, например, сохранять совмещение установочных меток 5510, 5590. Иными словами, направляющий паз 5534 и направляющий рельс 5514 могут препятствовать повороту ОЗБ 5502 относительно продольной оси ствола 5520. Как показано преимущественно на ФИГ. 52, проксимальный шарнирный зацеп 5568 шарнирного соединителя 5522 может проходить в первый зазор 5530 и может входить в проксимальный вырез 5572 проксимальной шарнирной рейки 5562, и дистальный шарнирный зацеп 5570 шарнирного соединителя 5522 может, например, проходить через второй зазор 5532.
Как показано преимущественно на ФИГ. 54, при введении дистального участка 5504 крепления в проксимальный участок 5522 крепления скос 5508 поворотного ключа поворотного ключа 5506 может упираться во вращатель 5544 пускового ствола. Скос 5508 поворотного ключа может направлять и/или определять направление движения вращателя 5544 пускового ствола в зазорный вырез 5526, который является продолжением паза 5524 поворотного ключа. Кроме того, при перемещении вращателя 5544 пускового ствола в зазорный вырез 5526 пусковой ствол 5540 может поворачиваться в направлении В. Пусковой ствол 5540 может поворачиваться из первого положения во второе положение. Такой поворот пускового ствола 5540 может упростить соединение дистального конца 5542 пускового ствола 5540 с режущим элементом в ОЗБ 5502. Кроме того, поворот вращателя 5544 пускового ствола может приводить к повороту манжеты 5580 в направлении В посредством зацепления между вращателем 5544 пускового ствола и канавкой 5584 вращателя пускового ствола (ФИГ. 46) в манжете 5580. Манжета 5580 может поворачиваться из исходного положения, например, во второе положение. Кроме того, блокирующий фиксатор 5582 может перемещаться вдоль паза 5536 фиксатора в стволе 5520 при повороте манжеты 5580. При повороте манжеты 5580 может также поворачиваться дистальный конец 5596 пружины 5592, поскольку дистальный конец 5596 пружины 5592 может фиксироваться в дистальном пазу 5588 пружины (ФИГ. 46) в манжете 5580. Смещение дистального конца 5596 относительно проксимального конца 5594 может создавать торсионную упругую возвратную силу, которая может приводить к смещению манжеты 5580, например, из второго положения в исходное положение, и может, например, смещать пусковой ствол 5540 из второго положения в первое положение.
Как показано преимущественно на ФИГ. 55, при повороте манжеты 5580 ко второму положению проксимальный шарнирный зацеп 5568 может оставаться в зацеплении с проксимальным вырезом 5572 в проксимальной шарнирной рейке 5560. Более того, дистальный шарнирный зацеп 5570 может поворачиваться так, чтобы дистальный шарнирный зацеп 5570 создавал зазор для дистальной шарнирной рейки 5562 ОЗБ 5502. Как показано на ФИГ. 56, ОЗБ 5502 может полностью вводиться в ствол 5520, если манжета 5580 и расположенный в ней шарнирный соединитель 5566 поворачиваются во второе положение. В различных вариантах осуществления дистальная шарнирная рейка 5562 может проходить дистальный шарнирный зацеп 5570 шарнирного соединителя 5566, если шарнирный соединитель 5566 поворачивается во второе положение. Кроме того, дистальный шарнирный зацеп 5570 может совмещаться с возможностью поворота с дистальным вырезом 5574 в шарнирном соединителе 5566. Как показано на ФИГ. 56, при полном введении ОЗБ 5502 в ствол 5520 вращатель 5544 пускового ствола может проходить дистальный конец 5509 поворотного ключа 5506.
Как показано на ФИГ. 57, вращатель 5544 пускового ствола может поворачиваться в направлении С, если дистальный конец 5509 поворотного ключа 5506 проходит вращатель 5544 пускового ствола. Например, вращатель 5544 пускового ствола может поворачиваться в направлении С из второго положения к первому положению. Кроме того, поворот вращателя 5544 пускового ствола может влиять на поворот манжеты 5580 в направлении С из второго положения в исходное положение. В различных вариантах осуществления пружина 5592 может смещать пусковой стержень 5540 к его первому положению и манжету 5580 к ее исходному положению. Например, вращатель 5544 пускового ствола может находиться в канавке 5584 вращателя пускового ствола (ФИГ. 46) в манжете 5580 так, что поворот вращателя 5544 пускового ствола приводит к повороту манжеты 5580. Из-за совмещения дистального шарнирного зацепа 5570 шарнирного соединителя 5566 и дистального выреза 5574 дистальной шарнирной рейки 5562 шарнирный соединитель 5566 может поворачиваться при повороте манжеты 5580, а дистальный шарнирный зацеп 5570 может поворачиваться до зацепления с дистальным вырезом 5574. Шарнирный узел 5559 может быть полностью собран, если дистальный шарнирный зацеп 5570 входит в зацепление с дистальным вырезом 5574. Кроме того, при повороте вращателя 5544 пускового ствола в направлении С дистальный конец 5542 пускового ствола 5540 может поворачиваться в направлении С, что может облегчить соединение режущего элемента в ОЗБ 5502 с дистальным концом 5542 пускового ствола 5540.
Как показано на ФИГ. 58, поворот манжеты 5580 может также привести к повороту блокирующего фиксатора 5582 манжеты 5580 в блокирующий вырез 5516 в направляющем рельсе 5514 дистального участка 5504 крепления. Например, при полном введении ОЗБ 5502 в ствол 5520 блокирующий вырез 5516 может совмещаться с пазом 5536 фиксатора так, что блокирующий фиксатор 5582 может поворачиваться через паз 5536 фиксатора и входить в блокирующий вырез 5516. Как описано в настоящем документе, пружина 5592 может сдвигать манжету 5580, чтобы она поворачивалась в направлении С (ФИГ. 57), после того как вращатель 5544 пускового ствола проходит дистальный конец 5509 поворотного ключа 5506. Как показано на ФИГ. 58, при повороте вращателя 5544 пускового ствола в направлении С вращатель 5544 пускового ствола может совмещаться с пазом 5518 пускового ствола в ОЗБ 5502. Совмещение вращателя 5544 пускового ствола с пазом 5518 пускового ствола может обеспечивать, например, дистальное перемещение пускового ствола 5540 для активации ОЗБ 5502.
Как описано в настоящем документе, вращающаяся манжета 5580 может фиксировать ОЗБ 5502 с возможностью высвобождения относительно ствола 5520. Кроме того, поворот манжеты 5580 может обеспечивать соединение и/или совмещение шарнирного узла 5559, а также соединение и/или совмещение, например, пускового ствола 5540 с режущим элементом в ОЗБ 5502. Кроме того, поворот манжеты также может разблокировать соединение ОЗБ 5502 со стволом, разобщать шарнирный узел 5559 и/или разобщать пусковой ствол 5540 и режущий элемент в ОЗБ 5502. Например, если манжета 5580 вновь поворачивается из исходного положения ко второму положению, блокирующий фиксатор 5582 может высвобождаться из блокирующего выреза 5516 в дистальном участке 5504 крепления. Соответственно, дистальный участок 5504 крепления можно будет отсоединить от проксимального участка 5522 крепления вдоль продольной оси, которую, например, определяет ствол 5520. В различных вариантах осуществления ОЗБ 5502 может отсоединяться от ствола 5520 без поворота ОЗБ 5502 относительно ствола 5520. Однако манжета 5580 может поворачиваться относительно ствола 5520, что позволяет, например, разобщить дистальную шарнирную рейку 5562 и шарнирный соединитель 5566 в манжете 5580 и может разобщить пусковой ствол 5540 и режущий элемент в ОЗБ 5502.
Как показано на ФИГ. 59-62, одноразовый загрузочный блок (ОЗБ) или концевой эффектор 5602 могут соединяться с возможностью высвобождения со стволом 5620 хирургического инструмента. В различных вариантах осуществления пружина или, например, множество пружин могут смещать ОЗБ 5602 в заблокированное положение относительно ствола 5620. Например, ОЗБ 5602 может соединяться со стволом 5620 с возможностью высвобождения посредством байонетной оправы, и пружина может поворачивать ОЗБ 5602 для соединения ОЗБ 5602 со стволом 5620 в байонетном соединении. ОЗБ 5602 может включать в себя дистальный участок 5604 крепления, а ствол 5620 может, например, включать в себя проксимальный участок 5622 крепления. Дистальный участок 5604 крепления ОЗБ 5602 может принимать проксимальный участок 5622 крепления ствола 5620 при закреплении ОЗБ 5602 на стволе 5620. В других вариантах осуществления проксимальный участок крепления ствола 5620 может принимать дистальный участок крепления ОЗБ 5602 при закреплении ОЗБ 5602 на стволе 5620.
В различных вариантах осуществления дистальный участок 5604 крепления ОЗБ 5602 может включать в себя фиксатор 5606, который может проходить радиально наружу от участка дистального участка 5604 крепления. Кроме того, фиксатор 5606 может включать в себя скошенную поверхность 5608. Как описано в настоящем документе, скошенная поверхность 5608 фиксатора 5606 может входить в зацепление с пружиной, например, такой как пружина 5636b, и может деформировать пружину 5636b при введении дистального участка 5604 крепления в проксимальный участок 5622 крепления. Более того, фиксатор 5606 может удерживаться проксимальным участком 5622 крепления, чтобы фиксировать ОЗБ 5602 с возможностью высвобождения на стволе 5622. Как показано преимущественно на ФИГ. 59, проксимальный участок 5622 крепления ствола 5620 может определять полость 5624. В различных вариантах осуществления форма и размеры полости 5624 могут позволять ей принимать дистальный участок 5604 крепления ОЗБ 5602. Кроме того, внутри полости 5624 могут располагаться пружины 5636a, 5636b. Например, первая пружина 5636a может быть расположена на первой стороне полости 5624, а вторая пружина 5636b может быть расположена на второй стороне полости 5624. Пружины 5636a, 5636b могут быть симметричными или несимметричными относительно полости 5624. В различных вариантах осуществления, по меньшей мере, участок пружины 5636а, 5636b может проходить в полость 5624. Например, ножка 5637 второй пружины 5636b может проходить в полость 5624, а другая ножка 5637 второй пружины 5636 может, например, удерживаться в проксимальном участке 5622 крепления.
Как показано на ФИГ. 59, проксимальный участок 5622 крепления может также включать в себя блокирующий паз 5638, который может быть образован в полости 5624 и/или может быть, например, доступен через полость 5624. Форма и размеры блокирующего паза 5638 могут, например, позволять ему принимать, например, фиксатор 5606. В различных вариантах осуществления блокирующий паз 5638 может удерживать фиксатор 5606, который фиксирует ОЗБ 5602 с возможностью высвобождения на стволе 5620. Кроме того, в различных вариантах проксимальный участок 5622 крепления может включать в себя защелку 5630. Защелка 5630 может перемещаться между незаблокированным положением (ФИГ. 59 и 60) и положением блокировки (ФИГ. 61 и 62). В различных вариантах осуществления защелка 5630 может быть подпружиненной, и пружина 5634 может смещать защелку 5630 в положение блокировки. Например, защелка 5630 может включать в себя пружину 5634 защелки, которая может смещать защелку 5630 к положению блокировки и/или в это положение. Положение блокировки может быть дистальным, например, по отношению к незаблокированному положению. В некоторых вариантах осуществления защелка 5630 может включать в себя захват для большого пальца и/или ребра 5632, чтобы облегчать перемещение защелки 5630 из положения блокировки в незаблокированное положение. Например, пользователь может нажимать на захват для большого пальца 5632 и подавать защелку 5630 проксимально, чтобы переводить защелку 5630 в незаблокированное положение.
В различных вариантах осуществления защелка 5630 может функциональным образом блокировать или, по меньшей мере, частично блокировать блокирующий паз 5638. Например, если защелка 5630 находится в положении блокировки (ФИГ. 61 и 62), лапка 5635 защелки 5630 может проходить поверх, по меньшей мере, участка блокирующего паза 5638. Защелка 5630 может покрывать или частично покрывать блокирующий паз 5638 и может препятствовать и/или ограничивать доступ к блокирующему пазу 5638. В некоторых вариантах осуществления лапка 5635 защелки 5630 может препятствовать перемещению и/или сдвигу фиксатора 5606 в блокирующий паз 5638. Более того, если защелка 5630 находится в положении блокировки, защелка 5630 может входить в зацепление с пружиной 5636а, 5636b. Например, как показано на ФИГ. 61 и 62, защелка 5630 может поддерживать пружину 5636b так, чтобы ограничивать и/или препятствовать деформации пружины 5636b. Более того, защелка 5630 может поддерживать пружину 5636b так, чтобы в полость 5624 невозможно было ввести дистальный участок 5604 крепления ОЗБ 5602. Например, по меньшей мере, участок пружины 5636b может блокировать полость 5624, что может препятствовать полному введению дистального участка 5604 крепления в проксимальный участок 5622 крепления. В некоторых вариантах осуществления проксимальный участок 5622 крепления может включать в себя множество пружин, которые могут обеспечивать вращательную силу воздействия на дистальный участок 5604 крепления для того, чтобы поворачивать дистальный участок 5604 крепления относительно проксимального участка 5622 крепления. Например, проксимальный участок 5622 крепления может включать в себя пару пружин или более трех пружин. В других вариантах осуществления только одна пружина в проксимальном участке 5622 крепления может использоваться для поворота дистального участка 5604 крепления относительно проксимального участка 5622 крепления. Кроме того, или альтернативно, в различных вариантах осуществления дистальный участок 5602 крепления ОЗБ 5602 может включать в себя, по меньшей мере, одну пружину, которая, например, может поворачивать дистальный участок 5602 крепления относительно проксимального участка 5622 крепления.
В различных вариантах осуществления, если защелка 5630 находится в незаблокированном положении (ФИГ. 59 и 60), блокирующий паз 5638 может быть незаблокированным и/или в меньшей степени блокированным лапкой 5635 защелки 5630. Например, фиксатор 5606 может заходить за незаблокированную защелку 5630, чтобы входить в блокирующий паз 5638. Более того, фиксатор 5606 может смещаться за незаблокированную защелку 5630 и входить в блокирующий паз 5638, как описано в настоящем документе. Более того, в различных вариантах осуществления, если защелка 5630 находится в незаблокированном положении, защелка 5630 может выходить из зацепления с пружиной 5636а, 5636b. Например, защелка 5630 может не обеспечивать защиту и/или не ограничивать деформацию пружины 5636а, 5636b при незаблокированной защелке 5630.
Как показано преимущественно на ФИГ. 59, если защелка 5630, например, перемещается и удерживается в проксимальном и/или незаблокированном положении, пружина 5636b может не опираться на защелку 5630. В таких вариантах осуществления ОЗБ 5602 может перемещаться в направлении А так, что дистальный участок 5604 крепления перемещается относительно проксимального участка 5622 крепления. Как показано преимущественно на ФИГ. 60, фиксатор 5606 дистального участка 5604 крепления может входить в зацепление с пружиной 5636b и может, например, сжимать и/или деформировать пружину 5636b. В некоторых вариантах осуществления скошенная поверхность 5608 фиксатора 5606 может сдвигаться вдоль пружины 5636b и может перемещать незакрепленную ножку 5637 пружины 5636b. Деформация пружины 5636b может создавать подпружинивающее усилие, посредством которого пружина 5636b может воздействовать на фиксатор 5606. Как показано на ФИГ. 61, такое подпружинивающее усилие может влиять на поворот фиксатора 5606. Например, фиксатор 5606 может поворачиваться в направлении В и заходить в блокирующий паз 5638, образованный в полости 5624. В различных вариантах осуществления пружина 5634 защелки может возвращать защелку 5630 в незаблокированное положение, после того как пользователь освобождает защелку 5630. Более того, если защелка 5630 возвращается в незаблокированное положение, лапка 5635 защелки 5630 может блокировать или частично блокировать блокирующий паз 5638. В таких вариантах осуществления фиксатор 5606 дистального участка 5604 крепления может блокироваться с возможностью высвобождения относительно проксимального участка 5622 крепления, если фиксатор 5606 удерживается в блокирующем пазу 5638. Более того, в некоторых вариантах осуществления защелка 5630 может удерживать и/или служить опорой для пружины 5636b относительно фиксатора 5606 до тех пор, пока защелка вновь не вернется в незаблокированное положение. В различных вариантах осуществления для отделения ОЗБ 5602 от ствола 5620 пользователь вновь может переместить защелку 5630 из положения блокировки в незаблокированное положение так, что фиксатор 5606 может поворачиваться и выходить из блокирующего паза 5638. В таких вариантах осуществления при повороте фиксатора 5606 вновь происходит сжатие и/или деформация пружины 5636b до тех пор, пока дистальный участок 5604 крепления не будет выведен из проксимального участка 5622 крепления.
В дополнение к вышесказанному, хирургический инструмент может быть выполнен с возможностью идентификации или, по меньшей мере, попытки идентификации концевого эффектора, который закреплен на хирургическом инструменте. Как будет более подробно описано ниже, в некоторых вариантах осуществления концевой эффектор может включать в себя электрические контакты, которые могут взаимодействовать с соответствующими электрическими контактами на стволе хирургического инструмента после закрепления концевого эффектора на стволе. В таких вариантах осуществления контроллер хирургического инструмента может обеспечивать проводное соединение с концевым эффектором, и через такие электрические контакты может обеспечиваться передача сигнала между контроллером и концевым эффектором. Как будет более подробно показано ниже, концевой эффектор может содержать, по меньшей мере, одну единицу информации, которая хранится в таком эффекторе и к которой может иметь доступ контроллер для идентификации концевого эффектора. По меньшей мере, одна единица информации может, например, включать в себя бит, более одного бита, байт или более одного байта информации. В некоторых других вариантах осуществления концевой эффектор может включать в себя передатчик, который может обеспечивать беспроводную передачу сигнала на контроллер хирургического инструмента. Аналогично вышесказанному концевой эффектор может содержать, по меньшей мере, одну единицу информации, которая хранится в таком эффекторе и которая может передаваться на контроллер для идентификации концевого эффектора. В таких вариантах осуществления контроллер хирургического инструмента может включать в себя приемник или использовать приемник, который может принимать передаваемый сигнал от концевого эффектора. Такой приемник может, например, располагаться на стволе и/или рукоятке хирургического инструмента.
Читателю станет понятно, что концевой эффектор, который связан с контроллером беспроводным образом, может быть выполнен, например, с возможностью обеспечения беспроводного сигнала. В различных обстоятельствах концевой эффектор может быть выполнен с возможностью однократной или более чем однократной подачи такого сигнала. В определенных обстоятельствах концевой эффектор может получать запрос на передачу сигнала в нужный момент и/или на многократную передачу сигнала непрерывным образом. В некоторых обстоятельствах концевой эффектор может включать в себя переключатель, который может управляться пользователем хирургического инструмента до, во время и/или после того, как концевой эффектор хирургического инструмента устанавливается на хирургическом инструменте. В различных вариантах осуществления переключатель концевого эффектора может представлять собой переключатель вкл./выкл. или выключатель питания, который может замыкаться или использоваться для приведения концевого эффектора в рабочее состояние. По меньшей мере, в одном варианте осуществления концевой эффектор может включать в себя, по меньшей мере, один источник электропитания, например, такой как аккумулятор, который может, например, использоваться передатчиком для подачи сигнала при замыкании переключателя вкл./выкл. В различных обстоятельствах после приведения концевого эффектора в рабочее состояние контроллер концевого эффектора может быть выполнен с возможностью обеспечения сигнала и передачи сигнала посредством передатчика. В некоторых обстоятельствах концевой эффектор может не испускать сигнал до тех пор, пока концевой эффектор не будет приведен в рабочее состояние. Такая конфигурация может, например, обеспечивать экономию заряда аккумулятора. В определенных вариантах осуществления хирургический инструмент может быть переведен в рабочий режим, в котором он может ожидать сигнала от концевого эффектора, прежде чем будет включен переключатель концевого эффектора. В различных обстоятельствах хирургический инструмент может находиться в режиме ожидания или в рабочем режиме с низким потреблением питания, при котором после приема сигнала контроллер переводит хирургический инструмент в рабочий режим с полным потреблением питания. В некоторых вариантах осуществления переключатель концевого эффектора может передавать команду контроллеру концевого эффектора для передачи сигнала на контроллер хирургического инструмента. Такой переключатель необязательно содержит сетевой переключатель; однако такой переключатель может селективно приводиться в рабочее состояния пользователем, чтобы передавать запрос на концевой эффектор для передачи сигнала в нужный момент и/или в непрерывном режиме, начиная с нужного момента.
Как показано на ФИГ. 114, концевой эффектор, например, такой как концевой эффектор 9560, может включать в себя дин или более электрических контактов, например, таких как контакты 9561, которые могут использоваться для приведения концевого эффектора 9560 в рабочее состояние. Например, как показано на ФИГ. 112, ствол 9040 хирургического инструмента может включать в себя контактную перемычку 9562, которая может быть выполнена с возможностью замыкания или электрического соединения двух или более контактов 9561 в случае установки концевого эффектора 9560 на стволе 9040. Перемычка 9562 может замыкать цепь с двумя контактами 9561, аккумулятором 9564 и, по меньшей мере, одной интегральной схемой 9566, размещенной на печатной плате 9565. После замыкания цепи, в дополнение к вышесказанному, аккумулятор 9564 может обеспечивать питание интегральной схемы или схем 9566 и приводить концевой эффектор 9560 в рабочее состояние. В различных обстоятельствах интегральная схема или схемы 9566 и антенна 9567, образованные на печатной плате 9565, могут содержать контроллер и передатчик, описанные выше. В определенных вариантах осуществления ствол 9040 может включать в себя смещающий элемент, например, такой как пружина 9563, которая может быть выполнена с возможностью смещения перемычки 9562 в состояние замыкания с электрическими контактами 9561. Перед соединением перемычки 9562 с электрическими контактами 9561 и/или после отсоединения концевого эффектора 9560 от ствола 9040 цепь можно разомкнуть, питание от аккумулятора 9564 может не подаваться на интегральную схему 9566, и/или питание, подаваемое на интегральную схему 9566, может ограничиваться, а концевой эффектор 9560 может быть в нерабочем состоянии. В результате упомянутого выше, в таких вариантах осуществления узел концевого эффектора может приводиться в рабочее состояние в результате установки концевого эффектора на хирургическом инструменте. В дополнение к вышесказанному, в различных вариантах конструкция и размещение концевого эффектора и хирургического инструмента могут быть такими, что только полная и правильная установка концевого эффектора на хирургическом инструменте будет приводить концевой эффектор в рабочее состояние.
Как описано выше и показано на ФИГ. 111, концевой эффектор может присоединяться к хирургическому инструменту, как показано на этапе 9600, приводиться в рабочее состояние, как показано на этапе 9602, а затем может регистрироваться на хирургическом инструменте, как показано на этапе 9604. В дополнение к вышесказанному, если хирургический инструмент производит попытку регистрации беспроводного сигнала от концевого эффектора, переведенного в рабочее состояние, хирургический инструмент может быть выполнен с возможностью оценки качества такого сигнала. В различных вариантах осуществления асинхронная последовательная связь между концевым эффектором и хирургическим инструментом может использоваться для оценки качества сигнала, принятого хирургическим инструментом. Например, концевой эффектор может выдавать сигнал, содержащий стартовый бит, который предшествует группе данных, например, такой как бит информации, и/или стоповый бит, который следует за группой данных. В таких случаях стартовый бит, бит данных и стоповый бит могут содержать 10-битовую группу символов или, например, комбинацию битов. Если контроллер хирургического инструмента может идентифицировать стартовый бит и стоповый бит комбинации битов, в таких случаях контроллер может предполагать, что байт данных или биты данных, принятые в промежутке между стартовым битом и стоповым битом, корректны и/или же содержат полную информацию. В различных обстоятельствах стартовый бит и/или стоповый бит могут содержать стоповый период до передачи следующего бита информации и/или до повторной передачи предыдущего бита информации.
В дополнение к вышесказанному, как показано на ФИГ. 110, контроллер хирургического инструмента может сопоставлять комбинацию битов или определенные биты данных, чтобы определить, являются ли корректными полученные им данные и/или содержат ли они полную информацию. В различных обстоятельствах данные могут передаваться таким образом, чтобы контроллер мог производить оценку данных и сопоставлять данные с шаблоном или шаблонами комбинации данных, в соответствии с которыми он ожидает принимать данные. Например, такой шаблон может быть выполнен и организован таким образом, чтобы наиболее значимый бит данных, например, такой как самый левый бит данных, например, содержал 1. Если контроллер может идентифицировать то, что наиболее значимый бит данных равен 1, то контроллер, как показано на этапе 9700 на ФИГ. 110, может осуществлять операцию XOR в отношении данных и сопоставлять данные с шаблоном или шаблонами комбинации данных, которые доступны контроллеру, как показано на этапе 9702. Операция XOR хорошо известна, и для краткости изложения ее подробное описание не приводится в настоящем документе. Если комбинация битов, принятая хирургическим инструментом, соответствует шаблону комбинации битов, доступному для контроллера, контроллер должен будет идентифицировать концевой эффектор. После идентификации концевого эффектора контроллер может получить доступ к хранящейся информации в отношении концевого эффектора, например, в микросхеме памяти, доступной для контроллера. Если контроллер устанавливает, что наиболее значимый бит данных принятой комбинации битов не равен 1, то, как показано на этапе 9700, контроллер может произвести операцию битового сдвига. Известно множество операций битового сдвига, например, таких как арифметические сдвиги, логические сдвиги и/или циклические сдвиги, которые могут использоваться для исключения битов неверных данных, которые были приняты перед нужной комбинацией битов. В различных обстоятельствах может исключаться ведущий, или самый левый, нулевой бит данных, как показано на этапе 9704, ФИГ. 110, и комбинация битов может сдвигаться влево до тех пор, пока, например, ведущим битом не станет 1. В дополнение к вышесказанному, в этом момент сдвинутая комбинация битов может сопоставляться с шаблонами комбинаций битов, с тем чтобы идентифицировать концевой эффектор. Если сдвинутая комбинация битов не соответствует шаблону комбинации битов, контроллер может повторять сдвиг комбинации битов до тех пор, пока следующее значение 1 в комбинации битов не станет ведущим битом, а новую сдвинутую комбинацию битов можно будет сопоставить с шаблонами комбинации битов. Такая операция сдвига и сопоставления может проводиться любое подходящее число раз до идентификации концевого эффектора и/или до тех пор, пока хирургический инструмент не сочтет, что данный концевой эффектор не может быть идентифицирован.
Читателю станет понятно, хирургический инструмент может содержать информацию о любом подходящем числе концевых эффекторов. Если произошла идентификация концевого эффектора хирургическим инструментом, в дополнение к вышесказанному, то хирургический инструмент может получить доступ к хранящейся информации о концевом эффекторе. Например, такая хранящаяся информация может содержать инструкции для хирургического инструмента относительно, во-первых, расстояния, на которое должен подаваться пусковой элемент в концевом эффекторе для завершения пускового хода, и/или, во-вторых, например, максимальной мощности или крутящего момента, который двигатель хирургического инструмента должен прикладывать к пусковому элементу. Такая информация или набор информации могут быть уникальны для каждого концевого эффектора, и, соответственно, именно та или иная идентификация концевого эффектора позволяет хирургическому инструменту функционировать желаемым образом. Без такой информации хирургический инструмент не сможет установить длину хода, необходимую для полного использования концевого эффектора, и/или соответствующим образом ограничить питание, которое он подает на пусковой элемент. В различных обстоятельствах хирургический инструмент может опираться на датчики, выполненные с возможностью обнаружения момента завершения пускового хода и/или чрезмерного уровня питания, подаваемого на пусковой элемент. Такие датчики могут препятствовать превышению лимита мощности двигателя хирургического инструмента и, например, поломке пускового элемента концевого эффектора.
В дополнение к вышесказанному, некоторые концевые эффекторы могут быть более надежными по сравнению с другими концевыми эффекторами, и, в результате, некоторые концевые эффекторы могут выдерживать более высокие прилагаемые силы двигателя хирургического инструмента. Соответственно, другие концевые эффекторы могут быть менее надежны и, в результате, могут выдерживать лишь меньшие по величине прилагаемые силы двигателя. В дополнение к вышесказанному, для того чтобы определить соответствующие прикладываемые силы для любого конкретного концевого эффектора, хирургический инструмент должен идентифицировать концевой эффектор, установленный на хирургическом инструменте. Если хирургический инструмент не может идентифицировать концевой эффектор, такой хирургический инструмент может использовать рабочую программу или режим по умолчанию. В режиме работы по умолчанию контроллер хирургического инструмента может ограничивать мощность, которую двигатель может подавать на пусковой элемент концевого эффектора, например, до минимальной мощности или мощности по умолчанию. Минимальная мощность может выбираться таким образом, чтобы мотор не повреждал концевой эффектор независимо от конкретно используемого концевого эффектора. В некоторых обстоятельствах параметры для использования наименее прочного, или наименее надежного, концевого эффектора, который может использоваться с хирургическим инструментом, могут применяться в рабочем режиме по умолчанию так, что хирургический инструмент не будет подавать чрезмерно большую мощность на концевой эффектор независимо от используемого концевого эффектора. В различных вариантах именно применение хирургических инструментов с электроприводом может стать следствием подачи чрезмерно большой мощности на концевой эффектор. Иными словами, концевые эффекторы, которые в прошлом использовались в ручных хирургических инструментах, и с помощью таких ручных хирургических инструментов их по существу было невозможно повредить, однако при использовании хирургического инструмента с электроприводом их можно легко разрушить. Более того, в таких используемых в прошлом концевых эффекторах не применялась технология, обеспечивающая их идентификацию хирургическими инструментами с приводом, и в результате применения описанной в настоящем документе рабочей программы по умолчанию такие используемые в прошлом концевые эффекторы по-прежнему могут применяться даже с хирургическими инструментами с приводом. При этом в рабочей программе по умолчанию также могут использоваться и другие параметры по умолчанию. Например, рабочая программа по умолчанию может использовать минимальную длину пускового хода или длину по умолчанию. В различных вариантах в рабочей программе по умолчанию может использоваться самая короткая длина хода концевого эффектора, которая может применяться с хирургическим инструментом. В таких случаях пусковой элемент не будет соприкасаться или разрушаться в результате контакта с дистальным концом концевого эффектора независимо от того, какой концевой эффектор используется.
Читателю станет понятно, что для хирургического инструмента, который содержит хранящуюся информацию об используемых с хирургическим инструментом концевых эффекторах, может возникать потребность в обновлении информации, доступной для такого хирургического инструмента. Например, если предпочтительные рабочие параметры в отношении какого-либо конкретного концевого эффектора изменяются со временем, может потребоваться обновление информации, которая хранится в каждом хирургическом инструменте. Кроме того, обновление информации в хирургических инструментах может также потребоваться, если для применения с такими хирургическими инструментами разрабатывается новый концевой эффектор. Если информация в хирургическом инструменте не обновляется своевременно, хирургический инструмент может быть не способен идентифицировать концевой эффектор и, в результате, использовать рабочую программу по умолчанию, которая описана в настоящем документе. В различных вариантах осуществления хирургический инструмент может не содержать хранящейся информации в отношении концевых эффекторов или, по меньшей мере, некоторых концевых эффекторов, которые могут использоваться вместе с хирургическим инструментом. В таких вариантах осуществления концевой эффектор может содержать хранящуюся информацию или параметры, относящиеся к концевому эффектору. Такие параметры могут быть доступны и/или передаваться на хирургический инструмент. В дополнение к вышесказанному, в различных обстоятельствах установка концевого эффектора на хирургическом инструменте может способствовать индуцированию сигнала концевого эффектора, который может приниматься хирургическим инструментом. Кроме того, аналогично вышесказанному, на концевой эффектор может передаваться запрос на передачу сигнала. В различных обстоятельствах такой сигнал может передаваться на хирургический инструмент посредством проводного и/или беспроводного соединения. В некоторых вариантах осуществления хирургический инструмент может подавать запрос на передачу сигнала концевому эффектору.
В дополнение к вышесказанному, концевой эффектор может содержать данные об одном или более параметрах относительно концевого эффектора, которые хранятся в его памяти. Такие параметры могут храниться, например, в одном или более запоминающихся устройств. В различных обстоятельствах такие параметры могут включать в себя желательную пусковую скорость пускового элемента, желательную скорость втягивания пускового элемента, расстояние или ход перемещения пускового элемента, максимальный крутящий момент, который будет прикладываться к пусковому элементу двигателем хирургического инструмента, и/или максимальный угол шарнирного поворота концевого эффектора, если, например, такой концевой эффектор действительно представляет собой шарнирный концевой эффектор. Некоторые шарнирные концевые эффекторы описаны в заявке на патент США № 13/803,097, озаглавленной ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД, полное описание которой включено в настоящий документ путем ссылки. Что касается параметра, относящегося к максимальному углу шарнирного поворота, контроллер может использовать такой параметр, чтобы ограничить диапазон шарнирного поворота, на который может отклоняться шарнирный участок. В некоторых случаях максимальный угол шарнирного поворота может составлять 45 градусов, например, который измеряется относительно продольной оси ствола хирургического инструмента. Что касается, например, параметра, относящегося к пусковой скорости и/или скорости втягивания пускового элемента, параметр может содержать данные о желаемой скорости пускового элемента и/или, например, процент или долю максимальной скорости двигателя. Например, значение 3 для пусковой скорости может означать, что контроллер должен управлять двигателем на уровне 30% его максимальной скорости, например, при выдвижении пускового элемента. Кроме того, например, значение 5 для скорости втягивания может означать, что контроллер должен управлять двигателем на уровне 50% его максимальной скорости, например, при втягивании пускового элемента. Что касается, например, параметра, относящегося к максимальному крутящему моменту двигателя, параметр может содержать данные о максимальном значении крутящего момента и/или, например, процент или долю максимального значения крутящего момента двигателя. Кроме того, что касается, например, параметра, относящегося к длине хода пускового элемента, такой параметр может содержать данные о желательном расстоянии, на которое может подаваться и/или втягиваться пусковой элемент, и/или, например, процент или долю максимальной длины хода хирургического инструмента. Например, значение 60 может указывать на то, что пусковой ход должен составлять, например, 60 мм. В различных случаях значения параметров могут передаваться в любом подходящем формате, включая двоичный формат, содержащий, например, биты и/или байты данных. Пример осуществления набора параметров представлен на ФИГ. 110А.
В дополнение к вышесказанному, в различных вариантах осуществления хирургический инструмент может быть выполнен с возможностью получения параметров от концевого эффектора в определенном порядке. Например, сигнал, поступающий от концевого эффектора, может содержать стартовый бит, первую комбинацию битов для первого параметра, например, максимального угла шарнирного поворота, вторую комбинацию битов для второго параметра, например, пусковой скорости, третью комбинацию битов для третьего параметра, например, скорости втягивания, четвертую комбинацию битов для четвертого параметра, например, максимального крутящего момента двигателя, пятую комбинацию битов для пятого параметра, например, длины хода, и, например, стоповый бит. Это лишь один пример. Любое подходящее число параметров может передаваться как компонент сигнала. Более того, может использоваться любое подходящее число стартовых битов и/или стоповых битов. Например, стартовый бит может предшествовать комбинации битов каждого параметра, и/или стоповый бит может следовать после комбинации битов каждого параметра. Как описано выше, использование, по меньшей мере, одного стартового бита и/или, по меньшей мере, одного стопового бита может упростить анализ качества сигнала, поступающего от концевого эффектора, проводимый контроллером хирургического инструмента. В определенных вариантах осуществления можно не использовать стартовый бит и/или стоповый бит. Более того, концевой эффектор может передавать множество сигналов для передачи параметров концевого эффектора на хирургический инструмент.
В дополнение к вышесказанному, в различных обстоятельствах контроллер хирургического инструмента может использовать контрольную сумму, чтобы оценить качество сигнала, принятого от концевого эффектора, и/или тот факт, является ли принятый им сигнал аутентичным, т. е. сигналом от распознанного концевого эффектора. Контрольная сумма может содержать значение, которое используется для гарантии отсутствия ошибки при хранении, передаче и/или приеме данных. Ее можно получить, например, посредством расчета бинарных значений данных и определенной комбинации бинарных значений с использованием некоторого алгоритма. Например, бинарные значения данных могут суммироваться, хотя можно использовать множество других алгоритмов. В вариантах осуществления, где параметры, связанные с определенными концевыми эффекторами, хранятся в хирургическом инструменте, как описано выше, значение контрольной суммы может также сохраняться для каждого такого концевого эффектора. В процессе применения контроллер хирургического инструмента может обеспечивать доступ к данным параметров и значению контрольной суммы, и после вычисления расчетного значения контрольной суммы контроллер может сопоставлять вычисленное значение контрольной суммы с хранящимся значением контрольной суммы. Если вычисленное значение контрольной суммы равно хранящемуся значению контрольной суммы, контроллер может сделать вывод о корректности всех данных, извлеченных из памяти хирургического инструмента. На данном этапе контроллер может обеспечивать управление хирургическим инструментом в соответствии с данными, загруженными из памяти. Если вычисленное значение контрольной суммы не равно хранящемуся значению контрольной суммы, контроллер может сделать вывод о некорректности, по меньшей мере, одного блока извлеченных из памяти данных. В дополнение к вышесказанному, в различных случаях контроллер затем может обеспечивать управление хирургическим инструментом в соответствии с рабочей программой по умолчанию, блокировать пусковой крючок хирургического инструмента и/или, например, иным образом передавать сообщение о действиях пользователю хирургического инструмента. В определенных случаях контроллер может производить повторную попытку загрузки данных из памяти хирургического инструмента и повторить расчет контрольной суммы и ее сопоставление, которые описано выше. Если повторно вычисленное значение контрольной суммы и хранящееся значение контрольной суммы совпадают, контроллер может затем осуществлять управление хирургическим инструментом в соответствии с данными, загруженными из памяти. Если повторно вычисленное значение контрольной суммы и хранящееся значение контрольной суммы не совпадают, контроллер затем может обеспечивать управление хирургическим инструментом в соответствии с рабочей программой по умолчанию, блокировать пусковой крючок хирургического инструмента и/или, например, иным образом передавать сообщение о действиях пользователю хирургического инструмента.
В тех вариантах осуществления, где параметры, относящиеся к концевому эффектору хранятся в памяти концевого эффектора, как описано выше, контрольная сумма может также, например, храниться в памяти концевого эффектора. В процессе применения контроллер хирургического инструмента может получать доступ к данным параметров и хранящемуся значению контрольной суммы. В дополнение к вышесказанному, в различных случаях концевой эффектор может передавать один или более сигналов, которые обеспечивают передачу параметров и значения контрольной суммы хирургическому инструменту. В результате указанного выше, хранящееся значение контрольной суммы и параметры могут передаваться одновременно, и для целей приведенного в настоящем документе описания значение контрольной суммы, принятое хирургическим инструментом, может рассматриваться как принятое значение контрольной суммы. Аналогично вышесказанному после приема данных параметров контроллер может вычислять значение контрольной суммы на основании данных параметров, т. е. вычислять расчетное значение контрольной суммы и сопоставлять вычисленное значение контрольной суммы с принятым значением контрольной суммы. Если вычисленное значение контрольной суммы равно принятому значению контрольной суммы, контроллер может сделать вывод о корректности всех извлеченных из концевого эффектора данных параметров. На данном этапе контроллер может обеспечивать управление хирургическим инструментом в соответствии с данными, загруженными из концевого эффектора. Если вычисленное значение контрольной суммы не равно принятому значению контрольной суммы, контроллер может сделать вывод о некорректности, по меньшей мере, одного блока извлеченных данных. В дополнение к вышесказанному, в различных случаях контроллер затем может обеспечивать управление хирургическим инструментом в соответствии с рабочей программой по умолчанию, блокировать пусковой крючок хирургического инструмента и/или, например, иным образом передавать сообщение о действиях пользователю хирургического инструмента. Такие ситуации могут чаще возникать в тех случаях, когда данные передаются от концевого эффектора на хирургический инструмент, например, посредством одного или более сеансов беспроводной связи. В любом случае в определенных вариантах контроллер может производить повторную попытку загрузки данных из концевого эффектора и повторять расчет контрольной суммы и ее сопоставление, которые описано выше. Если повторно вычисленное значение контрольной суммы и принятое значение контрольной суммы совпадают, контроллер может осуществлять управление хирургическим инструментом в соответствии с данными, загруженными из концевого эффектора. Если повторно вычисленное значение контрольной суммы и принятое значение контрольной суммы не совпадают, то, в дополнение к вышесказанному, контроллер после этого может обеспечивать управление хирургическим инструментом в соответствии с рабочей программой по умолчанию, блокировать пусковой крючок хирургического инструмента и/или, например, иным образом передавать сообщение о действиях пользователю хирургического инструмента. В результате упомянутого выше, в различных вариантах нет необходимости в хранении в памяти хирургического инструмента какой-либо информации относительно концевых эффекторов, которые используются в работе хирургического инструмента с установленным концевым эффектором. В таких обстоятельствах все данные относительно параметров концевого эффектора, значение контрольной суммы, которое используется для подтверждения целостности данных, могут храниться в памяти концевого эффектора. Хирургический инструмент может включать в себя операционную систему, для которой требуется ввод достаточной исходной информации от концевого эффектора, для того чтобы использовать такой концевой эффектор. Для этого может и не требоваться специальная рабочая программа для каждого концевого эффектора, который может использоваться с таким хирургическим инструментом. Единая рабочая программа может использоваться с любым концевым эффектором. Таким образом, нет необходимости в обновлении памяти хирургического инструмента, чтобы включить рабочие программы для дополнительных концевых эффекторов и/или, например, модифицированные программы для уже существующих эффекторов.
Как показано на ФИГ. 149-154, в дополнение или вместо систем беспроводной связи, которые используются для идентификации концевого эффектора, установленного на хирургическом инструменте, который описан в настоящем документе, хирургический инструмент в соответствии с, по меньшей мере, одним вариантом осуществления может содержать средства для сканирования и идентификации концевого эффектора. На ФИГ. 153 представлена рукоятка 11020 с устройством 11022 считывания штрих-кода, который может быть выполнен с возможностью сканирования штрих-кода, приведенного на ФИГ. 149 и 150, на концевом эффекторе 11060, показанном на ФИГ. 151, 152 и 154. Аналогично другим вариантам осуществления, описанным в настоящем документе, концевой эффектор 11060 может включать в себя участок ствола, упор 11062 и/или кассету 11064 со скобками, в которой, например, один или более участков концевого эффектора 11060 могут включать в себя нанесенный на них штрих-код. В некоторых вариантах осуществления концевой эффектор 11060 может включать в себя съемный компонент 11063, расположенный между упором 11062 и кассетой 11064 со скобками, который может сниматься до или после установки концевого эффектора 11060 на хирургическом инструменте. На ФИГ. 151 представлен вариант размещения штрих-кода 11065 на участке ствола концевого эффектора 11060. На ФИГ. 152 представлен вариант размещения штрих-кода 11065 на съемном компоненте 11063. В различных вариантах осуществления рукоятка 11020 хирургического инструмента может включать в себя устройство считывания штрих-кода, например, такое как устройство 11024 считывания штрих-кода, выполненное с возможностью считывания штрих-код на концевом эффекторе. Например, как показано преимущественно на ФИГ. 154, рукоятка 11020 может включать в себя участок 11022 внутреннего устройства считывания штрих-кода, выполненного с возможностью считывания штрих-кода 11065, нанесенного на ствол концевого эффектора 11060. По меньшей мере, в одном таком случае участок 11022 устройства считывания штрих-кода может включать в себя желоб 11026, размеры и форма которого выполнены с возможностью приема ствола концевого эффектора 11060, причем в нем может быть установлено устройство 11024 считывания штрих-кода в пределах и/или напротив отверстия 11027, образованного в желобе 11026, с тем чтобы устройство 11024 считывания штрих-кода могло бы считывать штрих-код 11065. Как станет понятно читателю, известно множество различных устройств считывания штрих-кода и протоколов обработки штрих-кода, и в данном случае может использоваться любой из подходящих способов. В некоторых случаях штрих-код может содержать двунаправленную информацию, что позволяет, например, считывать штрих-код в двух различных направлениях. В некоторых случаях штрих-код может использовать множество информационных слоев. В некоторых случаях протокол считывания штрих-кода может включать вводную информацию, которая предваряет информацию, идентифицирующую концевой эффектор, и/или иным образом передавать на хирургический инструмент такие сведения, которые позволят хирургическому инструменту осуществлять операции или же выполнять определенную рабочую программу. В некоторых случаях устройство считывания штрих-кода может испускать один или более световых лучей, которые могут попадать на множество пиков и впадин, образующих штрих-код. В некоторых случаях впадины штрих-кода могут проходить внутрь и/или формироваться внутри корпуса ствола концевого эффектора. Испускаемые лучи света могут отражаться на устройство считывания штрих-кода, где может происходить их обработка. При этом устройство 11024 считывания штрих-кода рукоятки 11020 размещается и устанавливается в желобе 11026 так, чтобы ограничить или, по меньшей мере, существенно ограничить область испускаемого и отраженного световых лучей в пределах участка 11022 устройства считывания штрих-кода. За счет этого устройство 11024 считывания штрих-кода не сможет случайно или непреднамеренно сканировать другой концевой эффектор, например, концевой эффектор, который отличается от предназначенного для установки на данный хирургический инструмент и который может при этом находиться в операционной.
В дополнение к вышесказанному, в различных случаях концевой эффектор может проходить через устройство считывания штрих-кода хирургического инструмента до окончательной установки концевого эффектора на хирургическом инструменте. В различных альтернативных вариантах осуществления хирургический инструмент может включать в себя выполненное с возможностью перемещения устройство считывания штрих-кода, которое может использоваться для сканирования штрих-кода концевого эффектора после установки концевого эффектора на хирургическом инструменте. В любом случае после идентификации концевого эффектора, по меньшей мере, в определенных обстоятельствах контроллер может получать доступ к рабочей программе, выполненной с возможностью применения идентифицированного концевого эффектора. штрих-код в той или иной форме может содержать системный загрузчик. В других обстоятельствах, как указано в других разделах настоящего документа, штрих-код может обеспечивать контроллер необходимой информацией или параметрами для использования стандартной операционной системы. В определенных обстоятельствах каждому концевому эффектору может присваиваться последовательный идентификационный номер так, что любые два концевых эффектора, даже если они относятся к одному и тому же типу концевого эффектора, могут иметь два различных нанесенных на них штрих-кода. В таких обстоятельствах контроллер может быть выполнен с возможностью блокировки применения концевого эффектора, который был перед этим сканирован хирургическим инструментом. Такая система может, например, исключать возможность повторного применения, по меньшей мере, частично отработанного концевого эффектора.
Как описано выше, концевой эффектор может быть выполнен с возможностью обмена данными с хирургическим инструментом посредством беспроводного соединения и/или проводной связи. Что касается проводной связи, то, как показано на ФИГ. 115, проксимальный конец концевого эффектора, например, такой как проксимальный конец 9969 концевого эффектора 9960, может содержать множество электрических контактов 9968, которые могут находиться в электрическом соединении с множеством электрических контактов 9948, расположенных на и/или в пределах дистального конца 9942 ствола 9940 хирургического инструмента. Как показано преимущественно на ФИГ. 116, каждый электрический контакт 9968 может включать в себя контактный элемент 9967, который, по меньшей мере, частично расположен внутри полости 9965 элемента. Каждый электрический контакт 9968 может также включать в себя смещающий элемент, например, такой как пружина 9966, который расположен между контактным элементом 9967 и внутренней боковой стенкой полости 9965 элемента. Пружина 9966 может быть выполнена с возможностью смещения контактного элемента радиально наружу. Контактный элемент 9967 может содержать выступающий из него ограничитель 9964, который может с возможностью перемещения смещаться в зацепление с другой внутренней боковой стенкой полости 9965 элемента под действием пружины 9966, по меньшей мере, до момента, когда концевой эффектор 9960 устанавливается на стволе 9940. Взаимодействие между ограничителем 9964 и боковой стенкой полости 9965 элемента может препятствовать перемещению контактного элемента 9967 наружу. При установке концевого эффектора 9960 на стволе 9940 контактные элементы 9967 электрических контактов 9968 могут подаваться внутрь под действием электрических контактов 9948 ствола, противодействуя смещающему усилию, прилагаемому пружинами 9966, как показано на ФИГ. 116. В различных обстоятельствах каждая пара контактов 9948 и 9968 может содержать цепь или канал 9950 связи. Хотя в приведенном примере показаны три пары контактов, может использоваться любое подходящее число контактов и/или каналов связи. Как показано на ФИГ. 117, контакты 10048 ствола в каждом случае могут содержать выполненный с возможностью перемещения элемент 10047 и смещающую пружину 10046, выполненную с возможностью прижимания выполненных с возможностью перемещения элементов 10047 к соответствующим контактам 10068 концевого эффектора. Как показано на ФИГ. 118, в некоторых вариантах осуществления один или оба контакта концевого эффектора и контакта ствола могут содержать гибкий участок. Например, концевой эффектор может содержать гибкие контакты 10168, которые могут упругим образом взаимодействовать с соответствующими контактами 9948 ствола.
Что касается описанных выше вариантов осуществления, то в различных обстоятельствах концевой эффектор может устанавливаться на стволе вдоль продольной оси. Как показано преимущественно на ФИГ. 115, самый проксимальный контакт 9968 концевого эффектора сначала входит в электрический контакт с самым дистальным контактом 9948 ствола. Как станет понятно читателю, в момент взаимодействия таких контактов концевой эффектор 9960 не полностью закреплен на стволе 9940. Хотя такое взаимодействие между этими контактами может носить временный характер, т. е. до момента более глубокой посадки концевого эффектора 9960 на стволе 9940, контроллер хирургического инструмента может быть дезориентирован и может неверно интерпретировать один или более сигналов концевого эффектора 9960. Аналогичная ситуация с неверной интерпретацией может возникать в момент, когда продольная матрица контактов 9968 концевого эффектора постепенно входит в контакт с продольной матрицей контактов 9948 ствола до полной посадки концевого эффектора 9940. В различных вариантах осуществления контроллер хирургического инструмента может быть выполнен с возможностью игнорирования сигналов, передаваемых через контакты до момента взаимодействия самого проксимального контакта 9968 концевого эффектора с самым проксимальным контактом 9948 ствола. Как показано на ФИГ. 119 и 120, одна из пар контактов может отличаться от другой пары контактов так, что контроллер может идентифицировать, какая пара контактов находится в контакте, и, в результате, обеспечивается полная посадка концевого эффектора. Например, концевой эффектор и ствол хирургического инструмента могут включать в себя первую пару контактов 10248а, 10268а, вторую пару контактов 10248b 10268b и третью пару контактов 10248с, 10268с, причем такая третья пара контактов может отличаться от первой пары контактов и от второй пары контактов. Если первая пара контактов 10248а, 10268а начинает взаимодействовать, контактный элемент 10267а может подаваться внутрь так, что первый участок 10263а соединения контактного элемента 10267а входит в контакт с первым участком 9951а цепи канала 9950а связи, а второй участок10264а соединения контактного элемента 10267а входит в контакт со вторым участком 9952а цепи канала 9950а связи. В таком положении контактного элемента 10267а как первый участок 9951а цепи, так и второй участок 9952а цепи могут передавать сигнал через контактный элемент 10267а. Если вторая пара контактов 10248b, 10268b начинает взаимодействовать, контактный элемент 10267b может подаваться внутрь так, что первый участок 10263b соединения контактного элемента 10267b входит в контакт с первым участком 9951b цепи канала 9950b связи, а второй участок 10264b соединения контактного элемента 10267b входит в контакт со вторым участком 9952b цепи канала 9950b связи. В таком положении контактного элемента 10267b как первый участок 9951b цепи, так и второй участок цепи 9952b могут передавать сигнал через контактный элемент 10267b. Если третья пара контактов 10248с, 10268с начинает взаимодействовать, контактный элемент 10267с может подаваться внутрь так, что первый участок 10263с соединения контактного элемента 10467с входит в контакт с первым участком 9951с цепи канала 9950с связи, а второй участок 10264с соединения контактного элемента 10267с выходит из контакта со вторым участком 9952с цепи канала 9950с связи и входит в контакт с первым участком 9951с цепи. В таком положении контактного элемента 10267а первый участок 9951с цепи может передавать сигнал через контактный элемент 10267с. В результате описанного выше, для первого, второго и третьего набора контактов может быть предусмотрен специальный порядок соединения с их соответствующими каналами связи при полной посадке концевого эффектора, и контроллер может быть выполнен с возможностью определения состояния такой полной посадки. Например, в начальный момент времени установки концевого эффектора на стволе третий контакт 10264с может вначале входить в контакт с первым контактом 10248а ствола. В таком положении только два участка цепи, т. е. 9951а и 9952а, могут передавать сигнал от концевого эффектора на контроллер, и, соответственно, контроллер может быть выполнен с возможностью обнаружения различного падения напряжения на подключениях по сравнению с падением напряжения, которое наблюдается в том случае, если все пять участков, например, 9951a, 9952a, 9951b, 9952b и 9951c, могут передавать сигнал при полной посадке концевого эффектора. Аналогично концевой эффектор может дополнительно вводиться в ствол, до тех пор пока третий контактный элемент 10267с не войдет в контакт со вторым контактом 10248b ствола, а второй контактный элемент 10267b не войдет в контакт с первым контактом 10248а ствола. В таком положении только четыре участка цепи, т. е. 9951a, 9952a, 9951b и 9952b, могут передавать сигнал от концевого эффектора на контроллер, и, соответственно, контроллер может быть выполнен с возможностью обнаружения различного падения напряжения на подключениях по сравнению с падением напряжения, которое наблюдается в том случае, если все пять участков, например, 9951a, 9952a, 9951b, 9952b и 9951c, могут передавать сигнал при полной посадке концевого эффектора.
В некоторых случаях, если концевой эффектор установлен на удлиненном стволе хирургического инструмента, оператор может активировать приводную систему и/или систему шарнирного соединения концевого эффектора, чтобы, например, осуществлять закрытие, пуск и/или шарнирный поворот концевого эффектора. Концевой эффектор может включать в себя первую браншу, вторую браншу и один или более датчиков, выполненных с возможностью обнаружения положения первой бранши относительно второй бранши. Как показано на ФИГ. 121-124, концевой эффектор 10360 может содержать первую браншу, или упор 10362, и вторую браншу, или кассету 10364 со скобками, причем упор 10362 выполнен с возможностью перемещения к кассете 10364 со скобками и от нее. Концевой эффектор 10360 часто вводят в организм пациента через троакар, при этом концевой эффектор 10360 может быть не всегда хорошо виден, даже с помощью эндоскопа. В результате, пользователь хирургического инструмента может быть не в состоянии точно оценить положение упора 10362 относительно второй бранши 10364. Как указано выше, для облегчения применения концевого эффектора концевой эффектор 10360 может включать в себя датчик для обнаружения положения упора 10362. В различных обстоятельствах такой датчик может быть выполнен с возможностью обнаружения просвета между упором 10362 и кассетой 10364 со скобками. Некоторые датчики могут быть выполнены с возможностью обнаружения углового положения упора 10362 относительно кассеты 10364 со скобками. Такие датчики описаны в заявке на патент США № 13/800,025, озаглавленной СИСТЕМА ДАТЧИКОВ КАССЕТЫ СО СКОБКАМИ ДЛЯ РЕГИСТРАЦИИ ТОЛЩИНЫ ТКАНИ, поданной 13 марта 2013 г., и заявке на патент США № 13/800,067, озаглавленной СИСТЕМА ДАТЧИКОВ КАССЕТЫ СО СКОБКАМИ ДЛЯ РЕГИСТРАЦИИ ТОЛЩИНЫ ТКАНИ, поданной 13 марта 2013 г. Вся информация, описанная в заявке на патент США № 13/800,025, озаглавленной СИСТЕМА ДАТЧИКОВ КАССЕТЫ СО СКОБКАМИ ДЛЯ РЕГИСТРАЦИИ ТОЛЩИНЫ ТКАНИ, поданной 13 марта 2013 г., и заявке на патент США № 13/800,067, озаглавленной СИСТЕМА ДАТЧИКОВ КАССЕТЫ СО СКОБКАМИ ДЛЯ РЕГИСТРАЦИИ ТОЛЩИНЫ ТКАНИ, поданной 13 марта 2013 г., включена в настоящий документ путем ссылки. Независимо от используемого датчика или датчиков положение упора 10362 может передаваться пользователю хирургического инструмента посредством экрана. Такой экран может быть размещен на концевом эффекторе 10360 и/или на стволе хирургического инструмента, например, на стволе 10340. Если экран размещен на концевом эффекторе, экран может быть виден, например, с помощью эндоскопа. В таких случаях экран может располагаться на концевом эффекторе так, что его не заслоняет троакар, который обеспечивает введение концевого эффектора в хирургическое поле. Иными словами, экран может быть размещен так, что в процессе применения он может находиться дистально по отношению к дистальному концу троакара. Если экран размещен на стволе, такой экран может располагаться на стволе так, чтобы его не заслонял троакар. Иными словами, экран может быть размещен так, что в процессе применения он может находиться проксимально по отношению к проксимальному концу троакара. В варианте осуществления, представленном на ФИГ. 121-124, экран 10390 размещен на стволе 10340.
Как показано на ФИГ. 121, упор 10362 концевого эффектора 10360 изображен в полностью открытом положении. В таком положении упора 10362 пусковой элемент 10330 концевого эффектора 10360 находится в проксимальном положении и пока еще не выдвинут дистально. Как будет более подробно описано ниже, пусковой элемент 10330 выдвигается дистально для перемещения упора 10362 к кассете 10364 со скобками. Положение пускового элемента 10330, показанное на ФИГ. 121, может отражать неактивированное, самое проксимальное положение пускового элемента 10300. Если, как показано преимущественно на ФИГ. 125, упор 10362 находится в полностью открытом положении, экран 10390 упора не подсвечивается. Как станет понятно читателю, на экране 10390 упора может отражаться положение упора 10362 в одном из нескольких различных положений. Экран 10390 упора оказывается в состоянии отображать пять возможных положений упора 10362; при этом предполагаются и другие варианты осуществления, которые могут предусматривать экран упора с использованием более пяти индикаторов или менее пяти индикаторов. При перемещении упора 10362 из его открытого положения в его закрытое положение экран 10390 может последовательно отображать положение упора 10362 с использованием индикаторов 10391-10395. Индикатор 10391 отображает упор 10362 в слегка закрытом положении. Индикаторы 10392, 10393 и 10394 отображают упор 10362 в частично закрытых положениях. Индикатор 10395 отображает упор 10362 в полностью закрытом, или параллельном, положении. При сравнении ФИГ. 121 и ФИГ. 122 читателю станет понятно, что пусковой элемент 10330 был выдвинут дистально, чтобы, по меньшей мере, частично закрыть упор 10362. Если упор 10362 находится в положении, представленном на ФИГ. 122, датчик положения упора может обнаруживать новое положение упора 10362, и, как показано на ФИГ. 126, может загораться индикатор 10391 экран 10390 упора. При сравнении ФИГ. 122 и ФИГ. 123 читателю станет понятно, что пусковой элемент 10330 был выдвинут дистально, чтобы еще больше закрыть, хотя и не полностью закрыть, упор 10362. Если упор 10362 находится в положении, представленном на ФИГ. 123, датчик положения упора может обнаруживать новое положение упора 10362, и, как показано на ФИГ. 127, может загораться индикатор 10393. При сравнении ФИГ. 122 и ФИГ. 123 читателю станет понятно, что упор 10362, например, был повернут примерно на 10 градусов и что при повороте упора 10362, например, только примерно на 5 градусов включился бы индикатор 10392 экрана 10390 упора. Из сравнения ФИГ. 123 и ФИГ. 124 видно, что пусковой элемент 10330 был выдвинут дистально, чтобы полностью закрыть упор 10362. Если упор 10362 находится в положении, представленном на ФИГ. 124, датчик положения упора может обнаруживать новое положение упора 10362, и, как показано на ФИГ. 128, может загораться индикатор 10395. При сравнении ФИГ. 123 и ФИГ. 124 читателю станет понятно, что упор 10362, например, был повернут примерно на 10 градусов и что при повороте упора 10362, например, только примерно на 5 градусов включился бы индикатор 10394 экрана 10390 упора.
В дополнение к вышесказанному, концевой эффектор и/или хирургический инструмент могут включать в себя контроллер, который может быть выполнен с возможностью управления экраном 10390 упора. Например, если концевой эффектор включает в себя экран 10390 упора, контроллер может размещаться в концевом эффекторе. Если ствол хирургического инструмента включает в себя экран 10390 упора и/или любой другой участок хирургического инструмента включает в себя экран 10390 упора, контроллер может размещаться в хирургическом инструменте. В других вариантах один из концевого эффектора и хирургического инструмента может включать в себя экран 10390 упора, тогда как другой из концевого эффектора и хирургического инструмента может включать в себя контроллер. В любом случае датчик или датчики положения упора могут обмениваться сигналами с контроллером. Контроллер может быть выполнен с возможностью интерпретации одного или более сигналов датчика или датчиков, чтобы определить положение упора 10362. Контроллер может быть связан с экраном 10390 упора, чтобы, как указано выше, обеспечивать включение индикаторов 10391-10395. В различных обстоятельствах каждый из индикаторов 10391-10395 может, например, содержат светодиод. В таких обстоятельствах каждый светодиод может находиться в электрическом соединении с выходным каналом микропроцессора контроллера так, что контроллер может селективно включать тот или иной светодиод независимо от других светодиодов. В различных случаях контроллер может непрерывно оценивать положение упора 10362 на основании данных, принятых от датчика упора, и с использованием этих данных постоянно определять, какой из индикаторов будет включаться. Например, при открытом или закрытом упоре 10362 контроллер может отслеживать положение упора 10362 и своевременно отображать такую информацию для пользователя хирургического инструмента с помощью индикаторов 10391-10395. В таких случаях для пользователя обеспечивается обратная связь в режиме реального времени или почти в режиме реального времени с информацией о положении упора 10362. В других случаях контроллер может устанавливать задержку вывода на экран информации о положении упора 10362 до тех пор, пока упор 10362 не прекратит движение или, по меньшей мере, по существу не прекратит движение, например, на определенный период времени. Как станет понятно читателю, индикаторы 10391-10395 могут отображать отдельные положения упора 10362; однако существует вероятность того, что упор 10362 может проходить через каждое из таких отдельных положений лишь в течение очень короткого промежутка времени, если он, например, находится в закрытом состоянии. В различных обстоятельствах контроллер может использовать тот или иной алгоритм, чтобы определить, какой из индикаторов должен включаться. Например, контроллер может применять алгоритм, которые определяет, какой из индикаторов точнее отображает положение упора 10362, даже с учетом того, что положение упора 10362 может и не совмещаться с любым из отдельных положений, которые могут отображаться экраном 10390 индикатора. В различных обстоятельствах контроллер может включать два смежных индикатора на экране 10390 индикатора, если упор 10362 находится в промежуточном положении между двумя отдельными положениями, представленными двумя смежными индикаторами.
В дополнение к вышесказанному, в различных обстоятельствах каждый из индикаторов 10391-10395 может содержать светодиод, который испускает свет одинакового цвета или, по меньшей мере, по существу одинакового цвета. В других случаях один или более индикаторов 10391-10395 могут излучать свет, цвет которого отличается от цвета других индикаторов 10391-10395. Например, индикатор 10391 может быть выполнен с возможностью излучения света желтого цвета, тогда как индикаторы 10392-10395 могут быть выполнены с возможностью излучения, например, свет зеленого цвета. Как станет понятно читателю, как показано на ФИГ. 122, ткань Т, расположенная между упором 10362 и кассетой 10364, может не полностью зажиматься упором 10362, если упор 10362 находится в частично закрытом положении, показанном на ФИГ. 122, и если индикатор 10391, связанный с таким положением упора 10362, загорается желтым светом, пользователь хирургического инструмента получает напоминание о необходимости соблюдать осторожность перед перемещением концевого эффектора 10360 и/или продолжением процесса установки скобок. В некоторых вариантах один или более индикаторов 10361-10365 в каждом случае могут быть выполнены с возможностью излучения света более одного цвета. Например, каждый индикатор 10361-10365 может содержать светодиод, выполненный с возможностью излучения света зеленого и красного цвета. В таких случаях индикаторы 10361-10365 могут испускать свет зеленого цвета, указывая на положение упора 10362, которое указано выше, или альтернативно испускать свет красного цвета при возникновении ошибки концевого эффектора 10360 и/или хирургического инструмента.
Как описано выше, упор концевого эффектора может быть выполнен с возможностью перемещения относительно кассеты со скобками между открытым положением и закрытым положением, и система хирургического инструмента может быть выполнена с возможностью обнаружения перемещения упора и передачи информации о перемещении упора пользователю. При этом также рассматриваются варианты осуществления, в которых кассета со скобками перемещается относительно упора. По меньшей мере, в одном таком варианте осуществления упор может быть зафиксирован или не способен поворачиваться. При фиксации или блокировке поворота упор может жестко выступать из участка рамы концевого эффектора; такой участок рамы концевого эффектора, из которого выступает упор, и кассета со скобками могут иметь возможность шарнирно поворачиваться относительно другого участка концевого эффектора или ствола хирургического инструмента. Независимо от того, будет ли в таких вариантах осуществления для концевого эффектора характерна возможность шарнирного поворота, кассета со скобками может поворачиваться относительно упора. Описанные в настоящем документа системы и способы обнаружения перемещения упора могут быть распространены на обнаружение перемещения кассеты со скобками. Более того, описанные в настоящем документа системы и способы отображения перемещения упора могут быть распространены на отображение перемещения кассеты со скобками.
В различных вариантах у оператора может возникнуть необходимость втягивать приводной элемент во время пускового хода. Хирургический инструмент, описанный в публикации Zemlok ‘763, использует узел втягивания, который содержит механический интерфейс с ручным приводом с приводной трубкой, которая перемещается при воздействии храпового механизма, срабатывающего от рычага втягивания, установленного на рукоятке. Такое размещение позволяет врачу втягивать пусковой стержень и в конечном счете приводной элемент загрузочного блока, если в процессе установки скобок возникает сбой в работе источника электропитания, или двигателя, или системы управления. Однако могут возникать проблемы в эффективном использовании такого узла втягивания, поскольку двигатель и редуктор двигателя в процессе срабатывания (активации) храпового механизма остаются в зацеплении. Таким образом, узел втягивания такого устройства должен обеспечивать достаточный крутящий момент для поворота шестерен в редукторе и вала двигателя, чтобы обеспечивать возможность поворота приводной трубки вручную. Формирование таких сил может создавать экстремальную нагрузку на компоненты узла втягивания, что может привести к катастрофической поломке узла втягивания. Хирургические инструменты 10, представленные на ФИГ. 1-28, могут быть выполнены с использованием уникальных и инновационных механизмов узла втягивания, которые позволяют исключить вероятность возникновения этой и других проблем.
Например, хирургический инструмент 10 может включать в себя узел 120 втягивания, который включает в себя блок 124 втягивания с верхним участком 126 и нижним участком 128. В различных формах узел 120 втягивания механически связан с приводной трубкой 102 посредством приводной шестерни 130 и шестерни 132 втягивания. См. ФИГ. 5. Приводная шестерня 130 соединена без возможности поворота с приводной трубкой 102 так, что поворот приводной шестерни 130 вызывает поворот приводной трубки 102. Приводная шестерня 130 и шестерня 132 втягивания могут содержать конические зубчатые колеса или т. п., чтобы обеспечить зубчатое зацепление между ними, как показано на ФИГ. 5. Шестерня 132 втягивания может быть связана с первым шпинделем 134 (ФИГ. 4 и 5), который по существу перпендикулярен верхнему и нижнему участкам 126 и 128 блока 124 втягивания и проходит между ними. Шпиндель 134 может быть фиксирован для вращательного движения вокруг оси шпинделя SA-SA, которая по существу перпендикулярна продольной оси LA-LA хирургического инструмента 10. См. ФИГ. 5. В различных формах шестерня 132 втягивания может иметь связанную с ней первую прямозубую шестерню 136. Первая прямозубая шестерня 136 находится в зацеплении со второй прямозубой шестерней 138, которая функционально закреплена на втором шпинделе 137, который также устанавливается в по существу перпендикулярном положении между верхним и нижним участками 126 и 128 блока 124 втягивания и предусматривает возможность поворота вокруг определяемой при этом второй оси SA'-SA' вала. Вторая прямозубая шестерня 138 закреплена посредством зубчатого зацепления с третьей прямозубой шестерней 140, которая расположена на первом шпинделе 134. Третья прямозубая шестерня 140 связана с первым участком 144 сцепления узла 142 обгонной муфты. Узел 142 обгонной муфты также включает в себя второй участок 146 сцепления, который устанавливается с возможностью поворота на первом шпинделе 134 выше первого участка 144 сцепления. Пружина или пружины (не показаны) могут располагаться между первым и вторым участками 144 и 146 сцепления, таким образом удерживая первый и второй участки 144 и 146 сцепления в приподнятом «несцепленном» положении, как показано на ФИГ. 5
Будет очевидно, что при повороте приводной трубки 102 приводная шестерня 130 будет заставлять поворачиваться первую, вторую и третью прямозубые шестерни 136, 138, 140, а также первый участок 144 сцепления и соответствующие шпиндели 134, 137. Поскольку второй участок 146 сцепления может поворачиваться вокруг шпинделя 134 и выводится из зацепления с первым участком 144 сцепления с помощью расположенного между ними пружинного механизма (не показан), поворот первого участка 144 сцепления поступательно не передается на второй участок 146 сцепления. Как показано на ФИГ. 5, первый и второй участки 144 и 146 сцепления включают в себя множество зубцов 148 зацепления, каждый из которых имеет плоскую поверхность зацепления и наклонную поверхность смещения. Как будет более подробно описано ниже, второй участок 146 сцепления может смещаться в зубчатое зацепление с первым участком 144 сцепления под действием рычага 150 втягивания. Поверхности смещения зубцов 148 позволяются поверхностям зацепления входить в контакт с каждым из зубцов так, что поворот второго участка 146 сцепления вызывает поворот первого участка 144 сцепления. Поворот первого участка 144 сцепления также вызывает поворот всех шестерен, находящихся в зацеплении, а также затем передает момент вращения на приводную трубку 102 вокруг продольной оси LA-LA.
Как показано на ФИГ. 6, рычаг 150 втягивания может содержать удлиненный участок 152 рукоятки, который включает в себя кулачковый участок 154. Кулачковый участок 154 может включать в себя отверстие, в котором может устанавливаться игольчатый подшипник обгонной муфты (не показан), который прикрепляется за счет механического контакта с муфтой (не показана), соединенной с первым шпинделем 134, чтобы обеспечить возможность поворота рычага 150 втягивания вокруг первого шпинделя 134. В публикации Zemlok ‘763 также описана работа такого игольчатого подшипника обгонной муфты в сборке с муфтой, и она полностью включена в настоящий документ путем ссылки. В различных формах рычаг 150 втягивания включает в себя один или более кулачковых элементов 156, каждый из которых имеет образованную на нем кулачковую поверхность 158. В первом положении рычаг 150 втягивания расположен вдоль ниши для рычага 14 корпуса 12, как показано на ФИГ. 1. Пружина, расположенная между первым и вторым участками 144, 146 сцепления, служит для подпружинивания рычага 150 втягивания относительно верхнего участка 126 блока 124 втягивания. Как показано на ФИГ. 6, кулачковые элементы 156 размещаются внутри соответствующих кулачковых пазов или ниш 160 в верхнем участке 126 блока 124 втягивания. Рычаг 150 втягивания удерживается в первом положении с помощью возвратной пружины 162, которая устанавливается между верхним участком 126 блока 124 втягивания и кулачковым участком 154 рычага 150 втягивания. Кулачковые элементы 156 и кулачковые пазы 160 препятствуют дальнейшему повороту рычага 150 втягивания.
В процессе применения, если рычаг 150 втягивания выходит из ниши 14 рычага (ФИГ. 1) в корпусе 12, кулачковые элементы 156 входят в контакт с соответствующими кулачковыми пазами 160, чтобы сместить кулачковый участок 154 рычага 150 втягивания в направлении вниз, противодействуя смещающей силе пружины (пружин), расположенной между первым и вторым участками 144, 146 сцепления. Такое перемещение вниз приводит к сжатию пружины (пружин) и подает первый и второй участки 144, 146 сцепления в блокирующее зацепление. Поворот кулачкового участка 154 в направлении против часовой стрелки приводит в движение игольчатый подшипник обгонной муфты, который соединен с муфтой и первым шпинделем 134. Непрерывное продвижение рычага 150 втягивания приводит к повороту узла 142 сцепления, который в свою очередь поворачивает прямозубые шестерни 136, 138, 140 и шестерни 132 и 130 втягивания и привода. При этом в свою очередь происходит поворот приводной трубки 102 вокруг продольной оси LA-LA инструмента. Поскольку пусковой стержень 104 находится в резьбовом зацеплении с приводной трубкой 102, поворот приводной трубки 102 описанным выше образом приводит к втягиванию (или проксимальному осевому движению) пускового стержня 104 в приводную трубку 102.
В процессе работы приводная трубка 102 может быть выполнена с возможностью поворота в направлении, противоположном направлению втягивания (например, в направлении по часовой стрелке) вокруг продольной оси LA-LA инструмента с помощью двигателя 100. Такой поворот приводной трубки 102 вызывает перемещение пускового стержня 104 по оси в дистальном направлении DD. Такое выдвижение пускового стержня 104 и приводного элемента 60 загрузочного блока 20 в настоящем документе может называться «срабатыванием». Как показано, например, на ФИГ. 5, узел 170 зубчатой передачи используется для установления величины приводного крутящего момента, необходимого для подачи пускового стержня 104 в дистальном направлении DD для того, чтобы привести в действие загрузочный блок 20. Узел 170 зубчатой передачи может включать в себя корпус 172 редуктора, который связан с двигателем 100. Например, корпус 172 редуктора может быть связан с корпусом 101 двигателя винтами 103 или другими механическими крепежными элементами и/или механизмами крепления. Узел 170 зубчатой передачи и двигатель 100 могут в совокупности называться «приводным блоком», который по существу обозначается как элемент 186.
Корпус 172 редуктора может крепиться с возможностью поворота в участке 190 ограничителя двигателя, который выполнен заодно с корпусом 12 или крепится на нем без возможности поворота. Такое расположение позволяет приводному блоку 186 поворачиваться внутри корпуса 12 вокруг продольной оси LA-LA инструмента, но препятствует его осевому перемещению внутри корпуса 12. Двигатель 100 может, например, обеспечиваться электропитанием от источника 200 электропитания такого типа, который более подробно описан в публикации Zemlok ‘763, и/или от системы 2000 электропитания (ФИГ. 129).
Чтобы упростить подачу электрического тока на приводной блок 180 и, в частности, на двигатель 100, можно использовать уникальную схему 210 контактов. Например, схема 210 контактов может включать в себя кольцевой отрицательный контакт 212 двигателя и кольцевой положительный контакт 114 двигателя, расположенные на корпусе 101 двигателя, как показано на ФИГ. 4. Фиксированный отрицательный контакт 216 может фиксироваться на корпусе 12 для перемещения с соприкосновением с отрицательным контактом 112 двигателя. Аналогично фиксированный положительный контакт 218 может фиксироваться для перемещения с соприкосновением с положительным контактом 214 двигателя при повороте приводного блока 180 внутри корпуса 12. Фиксированные отрицательные и положительные контакты 216, 218 могут содержать гибкие пружинные контакты для облегчения сборки установки приводного блока 186 внутри корпуса 12. Фиксированный отрицательный контакт 216 может электрически соединяться с источником 200 электропитания через отрицательный провод 220, и фиксированный положительный контакт 218 может электрически соединяться с источником 200 электропитания через положительный провод 222. Такая схема контактов позволяет подавать электрическое питания от источника 200 электропитания на двигатель 100, обеспечивая при этом поворот приводного блока 186 в корпусе рукоятки вокруг продольной оси LA-LA инструмента.
Как показано на ФИГ. 5, узел 170 зубчатой передачи может содержать блок планетарной передачи, который функционально связан с валом 107 двигателя. Например, в одном варианте установки кольцевая шестерня 173 может быть образована на внутренней поверхности корпуса 172 редуктора. Ведущая центральная шестерня 171 может быть связана с валом 107 двигателя. Ведущая центральная шестерня 171 может находиться в зубчатом зацеплении с множеством первых планетарных шестерен 175, которые крепятся на первом водиле 174 планетарных шестерен так, что они также находятся в зубчатом зацеплении с кольцевой шестерней 173. Первая центральная шестерня 176 может быть образована или иным образом закреплена на первом водиле 174 планетарных шестерен и может фиксироваться за счет зубчатого зацепления со вторыми планетарными шестернями 178, которые крепятся на втором водиле 177 планетарных шестерен. Вторые планетарные шестерни 178 также закреплены в зубчатом зацеплении с кольцевой шестерней 173. Вторая центральная шестерня 179 может быть образована или иным образом закреплена на втором водиле 177 планетарных шестерен и может фиксироваться за счет зубчатого зацепления множеством третьих планетарных шестерен 181. Третьи планетарные шестерни 181 могут крепиться на третьем водиле 180 планетарных шестерен в зубчатом зацеплении с кольцевой шестерней 173. Третья центральная шестерня 183 может быть образована или иным образом закреплена на третьем водиле 180 планетарных шестерен и находится в зубчатом зацеплении с множеством четвертых планетарных шестерен 187, которые могут соединяться с блоком 184 выходного вала, который крепится с возможностью поворота в корпусе 172 редуктора с помощью подшипника 185. Четвертые планетарные шестерни 187 также закреплены в зубчатом зацеплении с кольцевой шестерней 173.
На ФИГ. 7 представлен один вариант крепления приводного блока 186 с возможностью поворота в корпусе 12. Как показано на этой фигуре, площадка 192 установки двигателя на ограничителе 190 двигателя может включать в себя сегмент 196 корпуса редуктора, который крепится внутри с возможностью поворота. Например, в одном варианте крепления узел 170 зубчатой передачи крепится на сегменте 196 корпуса редуктора с возможностью поворота с помощью подшипника 185. Аналогично двигатель 100 крепится с возможностью поворота в участке 13 корпуса установки двигателя с помощью подшипника 198. Можно также использовать и другие способы крепления приводного блока 186 с возможностью поворота в корпусе 12.
Блок 184 выходного вала может быть функционально связан со сцеплением 230 (ФИГ. 5) такого типа и конструкции, как описано в публикации Zemlok ‘763, которая полностью включена в настоящий документ путем ссылки. В этой публикации можно найти дополнительные подробности относительно конструкции и работы такого сцепления 230. Однако в альтернативном варианте осуществления сцепление 230 может заменяться соединителем двух стволов или гильзой, которые служат для обеспечения соединения блока 184 выходного вала непосредственно с приводной трубкой 102.
Если происходит заедание выполненной с возможностью перемещения по оси приводной штанги хирургического инструмента, описанной в публикации Zemlok ‘763, или отключение электропитания инструмента, пользователь должен был задействовать узел втягивания, чтобы вернуть приводную штангу в исходное положение, что позволяет извлечь загрузочный блок. Однако эффективное втягивание осложнялось тем, что система втягивания должна была создавать достаточный крутящий момент, необходимый для возвратного хода множества шестерен в узле зубчатой передачи. Таким образом, эффективная работа такой системы втягивания могла представлять трудность.
По меньшей мере, в одном варианте осуществления хирургического инструмента, описанном в настоящем документе, для решения такой проблемы используется уникальная и инновационная система блокировки приводного блока с возможностью высвобождения, которая по существу обозначается как элемент 240. Например, как будет более подробно описано ниже, если система 240 блокировки приводного блока с возможностью высвобождения находится в «заблокированном» положении, поворот приводного блока 186 внутри корпуса 12 рукоятки становится невозможным. Приводной блок 186 удерживается в заблокированном положении при «срабатывании» хирургического инструмента, чтобы обеспечить передачу крутящего момента двигателя от двигателя 100 через узел 170 зубчатой передачи и в конечном счете на приводную трубку 102. Если возникает необходимость в приведении в действие узла 120 втягивания, система 240 блокировки приводного блока перемещается в «незаблокированное» положение, чтобы обеспечить возможность свободного поворота приводного блока 186 внутри корпуса 12, таким образом исключая необходимость в создании достаточного возвратного крутящего момента для возвратного движения механизма шестерен в узле 170 зубчатой передачи. Узел 170 зубчатой передачи может оставаться функционально связанным между двигателем 100 и приводной трубкой 102 во время работы узла 120 втягивания. В таких вариантах осуществления, хотя узел 170 зубчатой передачи остается функционально связанным с двигателем 100 и приводной трубкой 102, свободный поворот приводного блока 186 может уменьшать величину крутящего момента, необходимого для вращения узла 170 зубчатой передачи при возвратном движении механизма шестерен для втягивания приводной трубки 102. Такое уменьшение необходимой величины крутящего момента может повышать эффективность системы втягивания.
Например, как можно увидеть на ФИГ. 8, третья прямозубая шестерня 140 узла 120 втягивания может включать в себя разблокирующий кулачок 141, который выполнен с возможностью приведения в действие узла 250 блокирующей собачки системы 240 блокировки приводного блока. Одна форма узла 250 блокирующей собачки показана на ФИГ. 9-11. Например, как можно увидеть на ФИГ. 10, узел 250 блокирующей собачки может включать в себя элемент 252 собачки, который содержит образованный в нем блокирующий вырез 254. Размеры блокирующего выреза 254 позволяют последовательности разнесенных первых блокирующих клиньев 256, образованных по наружной периферии окружности корпуса 172 редуктора, свободно проходить через этот паз. См., например, ФИГ. 12 и 13. Блокирующий клин 258 собачки образован на блокирующей собачке 252 для блокирующего зацепления с любым из первых блокирующих клиньев 256, как это будет более подробно описано ниже. Как можно также видеть на ФИГ. 8-11, узел 250 блокирующей собачки может дополнительно включать в себя направляющий стержень 260 собачки, который выполнен с возможностью скользящим образом входить в проем 194 в площадке 192 установки двигателя. Пружина 262 собачки навита на направляющий стержень 260 собачки и размещается между элементом 252 собачки и площадкой 192 установки двигателя так, чтобы подпружинивать участок 264 кулачкового зацепления элемента 252 собачки для зацепления с третьей прямозубой шестерней 140.
Со ссылкой на ФИГ. 8, 13 и 14 будет описан один способ управления узлом 120 втягивания и системой 240 блокировки приводного блока. На ФИГ. 13 показана система 240 блокировки приводного блока в заблокированном положении. Как можно видеть на этой фигуре, элемент 252 собачки смещается в дистальное блокирующее положение с помощью пружины 262 собачки. В таком заблокированном положении блокирующий клин 258 собачки на элементе 252 собачки находится в блокирующем зацеплении с одним соответствующим из первых блокирующих клиньев 256 на корпусе 172 редуктора. В этом положении не задействован узел 120 втягивания, и невозможным является поворот узла 170 зубчатой передачи в корпусе 12. Включение двигателя 100 при нажатии на главный сетевой выключатель 80 (ФИГ. 1) приводит к повороту приводной трубки 102 и в конечном счете к осевому выдвижению пускового стержня 104, который приводит в движение приводную штангу 60 дистально через загрузочный блок 20.
Если, например, происходит заедание приводной штанги 60 в ткани, зажатой в загрузочном блоке 20, или возникает сбой электропитания двигателя 100, или по какой-либо иной причине двигатель 100 оказывается не в состоянии изменить направление поворота приводной трубки 102, чтобы в конечном счете втянуть пусковой стержень 104, врач может воспользоваться узлом 120 втягивания, чтобы вручную втянуть пусковой стержень 104 и приводную штангу 60. На ФИГ. 8 представлен узел 120 втягивания в неактивированном положении (т. е. если система 240 блокировки приводного блока находится в заблокированном положении). Чтобы начать процесс втягивания вручную, врач выводит рычаг 150 втягивания из ниши 14 для рычага в корпусе 12 рукоятки (в направлении R, см. ФИГ. 6). Перемещение рычага 150 втягивания в направлении R приводит к повороту кулачкового участка 154 рычага 150 втягивания внутри блока 124 втягивания. Такой первоначальный поворот рычага 150 втягивания в направлении R вынуждает разблокирующий кулачок 141 входить в зацепление с участком 264 зацепления кулачка элемента 252 собачки, чтобы сместить элемент 252 собачки в незаблокированное положение, таким образом позволяя приводному блоку 186 свободно поворачиваться внутри корпуса 12 рукоятки. Кулачковые пазы 160 в блоке втягивания имеют достаточную длину и размещены таким образом, чтобы создавать возможность для такого вращательного движения кулачкового участка 154 рычага 150 втягивания без первоначального высвобождения узла 142 сцепления. Таким образом, кулачковые пазы 160 могут быть длиннее кулачковых пазов в ранее предлагаемых вариантах установки блока втягивания, чтобы облегчить разблокирование узла 186 приводного блока перед приложением пусковых движений, которые вызывают поворот приводной трубки 102. Например, по меньшей мере, в одном варианте установки кулачковые пазы 160 могут быть удлиненными, чтобы обеспечивать поворот рычага 150 втягивания примерно на пятнадцать градусов. По мере того как врач продолжает поворачивать рычаг 150 втягивания в направлении R, участок 264 кулачкового зацепления будет двигаться вдоль наружной окружности разблокирующего кулачка 141 на третьей прямозубой шестерне 140. Дальнейший поворот рычага 150 втягивания в направлении R приводит к зацеплению кулачковых элементов 156 на кулачковом участке 154 с концевыми участками их соответствующих кулачковых пазов 160, чтобы сместить кулачковый участок 154 в направлении вниз. Такое перемещение вниз приводит к сжатию пружины (пружин), расположенной (-ых) между первым и вторым участками 144 и 146 сцепления, чтобы обеспечить зубчатое зацепление расположенных на них зубцов 148. Дальнейший поворот кулачкового участка 154 в направлении против часовой стрелки может приводить в движение игольчатый подшипник обгонной муфты, который соединен с муфтой и первым шпинделем. Непрерывное продвижение рычага 150 втягивания приводит к повороту узла 142 сцепления, который в свою очередь поворачивает прямозубые шестерни 136, 138, 140 и шестерни 132 и 130 втягивания и привода. При этом в свою очередь происходит поворот приводной трубки 102 и втягивание пускового стержня 104.
Рычаг 150 втягивания может приводиться в действие на заданную величину движения до тех пор, пока участок рычага 150 втягивания не будет упираться в участок корпуса 12. После этого рычаг 150 втягивания возвращается в его первое положение под действием возвратной пружины 162. При такой операции поднимается кулачковый участок 152, что позволяет второму участку 146 сцепления также переместиться вверх и высвободиться из зацепления с первым участком 144 сцепления. Игольчатый подшипник обгонной муфты может освободить муфту, таким образом позволяя рычагу 150 втягивания вернуться в первое положение, не влияя на перемещение приводной трубки 102. После возвращения рычага 150 втягивания в первое положение приводной блок 186 снова оказывается в заблокированном положении. Применение храпового механизма или поворот рычага 150 втягивания можно повторять многократно до тех пор, пока пусковой стержень 104 не вернется в нужное положение.
Поскольку в ходе такого вращательного движения обеспечивается свободный поворот корпуса 172 редуктора, величина крутящего момента, необходимого для поворота приводной трубки 102 и шестерен в узле 170 зубчатой передачи, значительно снижается по сравнению с крутящим моментом, необходимым для функционирования ранее использованных узлов втягивания. Такой механизм также преимущественно препятствует передаче сил крутящего момента, которые передаются на вал 107 двигателя под действием узла втягивания, при том что узел 170 зубчатой передачи остается связанным приводным образом с валом 107 двигателя. Иными словами, узел 170 зубчатой передачи может оставаться в соединении приводным образом между валом 107 двигателя и приводной трубкой 102 во время работы узла 120 втягивания. Такой механизм отличается от механизмов втягивания, описанных, например, в патенте США № 7,959,050, который полностью включен в текст настоящего документа путем ссылки, но применение которого будет приводить к физическому разобщению или физическому прерыванию участков цепи передачи при приведении в действие системы втягивания.
На ФИГ. 15-18 показан другой хирургический инструмент 310, который по существу аналогичен описанному выше хирургическому инструменту 10 за исключением описанных ниже отличий. Как показано на ФИГ. 16, инструмент 310 включает в себя узел 470 зубчатой передачи, который содержит корпус 472 редуктора, который может быть связан с двигателем 100, например, как описано выше. Узел 470 зубчатой передачи и двигатель 100 могут в совокупности называться «приводным блоком», который по существу обозначается как элемент 486. Узел 470 зубчатой передачи может быть идентичен описанному выше узлу 170 зубчатой передачи за исключением описанных ниже отличий.
По меньшей мере, в одном варианте механизма корпус 472 редуктора может крепиться без возможности поворота или может быть выполнен заодно с участком 190 ограничителя двигателя или иным образом фиксироваться на корпусе 12 без возможности поворота с применением различных способов, описанных в настоящем документе. Поскольку приводной блок 486 не поворачивается при таком размещении, его можно напрямую подключать к источнику электропитания посредством проводов. Например, питание может подаваться на двигатель 100 так, как описано в публикации Zemlok ‘763, или иными подходящими способами. Как показано на ФИГ. 16, узел 470 зубчатой передачи может включать в себя конструкцию планетарных шестерен, который функционально связан с валом 107 двигателя. Например, в одном варианте расположения фиксированная кольцевая шестерня 473 может быть образована на внутренней поверхности корпуса 472 редуктора. Ведущая центральная шестерня 471 может быть связана с валом 107 двигателя. Ведущая центральная шестерня 471 может находиться в зубчатом зацеплении с множеством первых планетарных шестерен 475, которые крепятся на первом водиле 474 планетарных шестерен. Первые планетарные шестерни 475 также находятся в зубчатом зацеплении с фиксированной кольцевой шестерней 473. Первая центральная шестерня 476 может быть образована на первом водиле 474 планетарных шестерен и может находиться в зубчатом зацеплении с множеством вторых планетарных шестерен 478, которые крепятся на втором водиле 477 планетарных шестерен. Вторые планетарные шестерни 478 также могут находиться в зубчатом зацеплении с фиксированной кольцевой шестерней 473. Вторая центральная шестерня 479 может быть образована или закреплена на втором водиле 477 планетарных шестерен и может находиться в зубчатом зацеплении с множеством третьих планетарных шестерен 481, которые крепятся на третьем водиле 480 планетарных шестерен. Третьи планетарные шестерни 481 находятся в зубчатом зацеплении с фиксированной кольцевой шестерней 473. Третья центральная шестерня 483 может быть образована или иным образом закреплена на третьем водиле 480 планетарных шестерен. Третья центральная шестерня 483 может находиться в зубчатом зацеплении с множеством четвертых планетарных шестерен 487, которые соединены с блоком 484 выходного вала, который крепится с возможностью поворота в корпусе 472 редуктора на подшипнике 185. Множество четвертых планетарных шестерен 487 может находиться в зубчатом зацеплении с блокируемой кольцевой шестерней 485, которая крепится с возможностью поворота на корпусе 472 редуктора. Шестерни 471, 473, 475, 476, 478, 479, 481 и 483 в настоящем документе могут в совокупности называться узлом 460 зубчатой передачи.
Блокируемая кольцевая шестерня 485 может с возможностью поворота крепиться в кольцевой полости 490 в участке 190 ограничителя двигателя (ФИГ. 16). Размер полости 490 подбирается таким образом, чтобы обеспечивать свободный поворот внутри нее блокируемой кольцевой шестерни 485 вокруг продольной оси LA-LA инструмента. Блокируемая кольцевая шестерня 485 может устанавливаться в кольцевом проеме 490, а затем ее положение фиксируется стопорным элементом 492, который вводится или иным образом блокируется в кольцевом проеме 490.
Хирургический инструмент 310 может дополнительно включать в себя систему 540 блокировки приводного блока, которая включает в себя узел 542 передвижного кольца, выполненный с возможностью перемещения. По меньшей мере, в одной форме узел 542 передвижного кольца может включать в себя, например, передвижное кольцо 543, которое имеет, по меньшей мере, один и предпочтительно множество блокирующих элементов, например, в виде шпилек 544. Шпильки 544 выступают из передвижного кольца 543 и выполнены с возможностью селективного блокирующего зацепления с блокируемой кольцевой шестерней 485. Каждая из блокирующих шпилек 544 может приниматься с возможностью скольжения в соответствующий проем 546 в стопорном элементе 492. Осевое перемещение передвижного кольца 542 обеспечивается за счет кулисы 550, которая связана с фиксатором 560 сцепления. Как показано на ФИГ. 15, фиксатор 560 сцепления может содержать пружинный фиксатор, который прижимается к участку наружной окружности третьей прямозубой шестерни 140. Фиксатор 560 сцепления может иметь образованный на нем зацеп 562, который соединен со стержнем 564 скобки переключения. Стержень 564 скобки переключения может иметь определенную гибкость и может быть связан с возможностью поворота с передвижным кольцом 542. В процессе нормальной работы (т. е. когда пусковой стержень 104 подается двигателем 100) блокирующие шпильки 544 находятся в блокирующем зацеплении с блокируемой кольцевой шестерней 475, чтобы препятствовать поворот блокируемой кольцевой шестерни 475 так, чтобы крутящий момент передавался на блок 484 выходного вала и в конечном счете на приводную трубку 102.
Если врач намерен воспользоваться узлом 120 втягивания, чтобы втянуть пусковой стержень 104, рычаг 150 втягивания поворачивается из исходного положения, показанного на ФИГ. 15, в направлении R. По мере поворота рычага 150 втягивания фиксатор 560 сцепления поворачивается вместе с третьей прямозубой шестерней 140, таким образом заставляя стержень 564 скобки переключения перемещать передвижное кольцо 542 в дистальном направлении DD. В процессе перемещения передвижного кольца 542 в дистальном направлении DD блокирующие шпильки 544 выходят из блокирующего зацепления с блокируемой кольцевой шестерней 485, чтобы позволять блокируемой кольцевой шестерне 485 поворачиваться относительно корпуса 472 редуктора. Врач продолжает использовать храповой механизм рычага 150 втягивания, переводя его в конечное положение, показанное на ФИГ. 18. По меньшей мере, в одном варианте осуществления рычаг 150 втягивания, например, необходимо поворачивать только примерно на пятнадцать градусов, чтобы высвободить блокирующие шпильки 544 из зацепления с блокируемой кольцевой шестерней 485. После высвобождения врачом рычага 150 втягивания возвратная пружина 162 вернет рычаг 150 втягивания в исходное положение, и врач может повторять процедуру до тех пор, пока пусковой стержень 104 не будет втянут до нужного положения. Поскольку блокируемая кольцевая шестерня 485 может свободно поворачиваться внутри корпуса 472 подшипника, повороту приводной трубки 102 и блока 484 выходного вала не будут препятствовать другие зубчатые механизмы в узле 470 зубчатой передачи. Таким образом, величина создаваемого храповым механизмом крутящего момента, необходимого для втягивания пускового стержня 104, уменьшается по сравнению с механизмами втягивания, которые остаются в функциональном зацеплении с зубчатыми механизмами в узле зубчатой передачи в процессе втягивания. Более того, несмотря на снижение необходимого крутящего момента, пусковой стержень 104 может оставаться в функциональном зацеплении с узлом 470 зубчатой передачи. Иными словами, пусковой стержень 104 может оставаться функционально связанным с двигателем 100. Если передвижное кольцо 542 вступает в контакт с подшипником 185 на площадке 192 установки двигателя, блокирующие шпильки 544 входят в блокирующее зацепление с блокируемой кольцевой шестерней 485. Фиксатор 560 сцепления может быть выполнен с возможностью смещения относительно третьей прямозубой шестерни 140 после того, как передвижное кольцо входит в контакт с подшипником 185 или другим участком площадки 192 установки двигателя. Таким образом, система 540 блокировки приводного блока служит для того, чтобы облегчать поворот, по меньшей мере, участка приводного блока внутри корпуса рукоятки в ходе приложения возвратных движений приводной трубки 102, чтобы снизить величину возвратного крутящего момента, необходимого для возврата пускового стержня 104.
Показанный на ФИГ. 19 хирургический инструмент 610 по существу идентичен хирургическому инструменту 310, за исключением того, что фиксатор 560 сцепления соединяется с третьей прямозубой шестерней 140 таким образом, чтобы обойтись без использования кулисы 550, которая применяется в хирургическом инструменте 310. Как можно видеть, например, на ФИГ. 18, стержень 564 скобки переключения напрямую соединен с передвижным кольцом 542. Возвратно-вращательное перемещение рычага 150 втягивания, как указано выше, приводит к перемещению передвижного кольца 542 и к зацеплению и высвобождению блокирующих шпилек 544 и блокируемой кольцевой шестерни 485.
На ФИГ. 20 и 21 показан другой хирургический инструмент 610', который по существу аналогичен хирургическому инструменту 610 за исключением описанных ниже отличий. Например, в этом варианте механизма, по меньшей мере, две листовые блокирующие пружины 620 и блокирующих элемента 622 кольцевой шестерни расположены на корпусе 472' редуктора узла 470' зубчатой передачи. Как можно видеть на ФИГ. 20, каждая блокирующая пружина 620 и соответствующий фиксирующий элемент 622 расположены в пазу 624 в корпусе 472' редуктора. В таком варианте механизма блокирующие шпильки 544', которые связаны с передвижным кольцом 542, выполнены с возможностью вхождения в контакт и прижимания соответствующей блокирующей пружины 620 вовнутрь, чтобы воздействовать на соответствующий фиксирующий элемент 622 кольцевой шестерни, переводя его в блокирующее зацепление с блокируемой кольцевой шестерней 485. В этом положении (показано на ФИГ. 20) невозможен поворот блокируемой кольцевой шестерни 485 относительно корпуса 472' редуктора. Если стержень 564 скобки переключения подает передвижное кольцо 542 в дистальном направлении DD, блокирующие шпильки 544' высвобождаются из зацепления со своей соответствующей блокирующей пружиной 620, что позволяет пружине 620 изгибаться с возвратом в исходное положение, чтобы позволить блокирующим элементам 622 кольцевой шестерни высвободиться из зацепления с блокируемой кольцевой шестерней 485, позволяя ей поворачиваться относительно корпуса 472' редуктора. Таким образом, при срабатывании узла 120 втягивания блокируемая кольцевая шестерня 485 может свободно поворачиваться относительно корпуса 472' редуктора, чтобы таким образом уменьшить величину возвратного крутящего момента, необходимого для втягивания пускового стержня 104 в проксимальном направлении PD.
На ФИГ. 22-24 представлен другой пример механизма узла втягивания для селективного ручного втягивания дистального участка пускового стержня хирургического инструмента 710, если дистальный участок пускового стержня или другого компонента хирургического инструмента, с которым он функционально соединен, заедает в процессе работы, или же происходит сбой рабочего электропитания для продвижения узла пускового стержня. Кроме различий, описанных ниже, хирургический инструмент 710 по своей конструкции и работе может быть аналогичен хирургическим инструментам, описанным выше и/или описанным в публикации Zemlok ‘763, которая полностью включена в текст настоящего документа путем ссылки.
Как можно видеть на ФИГ. 22-24, хирургический инструмент 710 включает в себя корпус 712, в котором функционально размещается узел 720 пускового стержня. Например, в корпусе 712 могут функционально размещаться двигатель и узел зубчатой передачи (не показан) для сообщения вращательных движений приводной трубке, которые могут приводить к осевому перемещению узла 720 пускового стержня различными способами, описанными в настоящем документе. По меньшей мере, в одном варианте механизма узел 720 пускового стержня может включать в себя проксимальный пусковой элемент или участок 722 стержня, который функционально взаимодействует с приводной трубкой различными способами, описанными в настоящем документе. В других вариантах механизма хирургического инструмента проксимальный участок 722 пускового стержня может функционально взаимодействовать с другими приводными механизмами и системами, которые выполнены с возможностью приложения осевых движений проксимальному участку 722 пускового стержня.
Как дополнительно можно видеть на ФИГ. 22-24, узел 720 пускового стержня может дополнительно включать в себя дистальный пусковой элемент или участок 724 стержня, который функционально связан с проксимальным концом выполненной с возможностью перемещения по оси приводной штанги 60 загрузочного блока 20, связанной с ним различными способами, описанными в настоящем документе. Узел 730 втягивания в форме тягового узла 732 втягивания может с возможностью поворота размещаться между проксимальным участком 722 пускового стержня и дистальным участком 724 пускового стержня. В приведенном примере варианта механизма тяговый узел 732 втягивания включает в себя приводной рычаг 734, который имеет участок 736 рукоятки рычага, которая на шпильке крепится на проксимальном участке 722 пускового стержня. Тяговый узел 732 втягивания дополнительно включает в себя дистальный рычаг 738 втягивания, который на шпильке крепится к приводному рычагу 734 и дистальному участку 724 пускового стержня, как это показано на фигуре. В приведенном варианте осуществления корпус 712 включает в себя проходящий дистально участок 714 корпуса шарнира, который может также включать в себя проходящий дистально сегмент 716 корпуса вала. Сегмент 716 корпуса вала может служить для фиксации тягового узла 732 втягивания по оси по мере его перемещения по оси в дистальном и проксимальном направлениях в ответ на осевое перемещение узла 720 пускового стержня. Чтобы обеспечить осевое перемещение тягового узла 732 втягивания относительно сегмента 716 корпуса вала, приводной рычаг 734 проходит через паз 718, образованный, как показано на фигуре, в сегменте 716 корпуса вала.
На ФИГ. 22 показано положение узла 720 пускового стержня и узла 730 втягивания перед срабатыванием. На ФИГ. 23 показано положение узла 720 пускового стержня и узла 730 втягивания после срабатывания в дистальном направлении DD. Если в процессе срабатывания врачу потребуется вернуть приводную штангу 60 обратно в исходное положение, ему нужно будет просто захватить участок 736 рукоятки рычага приводного рычага 734 и повернуть ее в направлении R, как показано на ФИГ. 24, при этом дистальный участок 724 пускового стержня и приводная штанга 60 перемещаются в проксимальном направлении PD. Как показано на ФИГ. 22 и 23, в процессе срабатывания проксимальный конец 725 дистального участка 724 пускового стержня может быть обычно разнесен по оси с дистальным концом 735 проксимального участка 734 пускового стержня на расстояние, обозначаемое RD. Расстояние RD может, например, оставаться неизменным в процессе срабатывания и обычного втягивания узла 720 пускового стержня с помощью приводного блока. Однако при приведении в действие врачом узла втягивания расстояние между проксимальным концом 725 дистального участка 724 пускового стержня и дистальным концом 735 проксимального участка 734 пускового стержня (расстояние RD') будет меньше расстояния RD. Кроме того, как можно видеть на ФИГ. 22, расстояние между исходным положением дистальной рабочей головки 62 приводной штанги 60 и конечным положением дистальной рабочей головки 62 (т. е. после полного пускового хода) определяется как расстояние FD. При желании расстояние RD может быть достаточно большим, чтобы обеспечивать необходимое втягивание дистального участка 724 пускового стержня (т. е. перемещение ближе к дистальному концу 735 проксимального участка 722 пускового стержня) для возврата рабочей головки 62 из конечного положения в ее исходное положение. Иными словами, дистальный участок 724 пускового стержня может втягиваться на расстояние втягивания, которое, по меньшей мере, равно или больше пускового расстояния FD. В таком варианте, например, при заедании рабочей головки 65 или ее остановке в конечном положении по другой причине приведение в действие узла втягивания может обеспечивать полное втягивание приводной штанги 60 для возврата дистальной рабочей головки 62 в ее исходное положение, при этом дистальная рабочая головка 62 может позволять упору 22 раскрываться при шарнирном повороте и освобождать ткань.
На ФИГ. 25-28 представлен пример альтернативного варианта узла 720' пускового стержня, который может селективно втягиваться вручную. Как показано на фигурах, узел 720' пускового стержня включать в себя проксимальный участок 722' пускового стержня, который может функционально взаимодействовать с приводной трубкой различными способами, описанными в настоящем документе. В других вариантах механизмов хирургического инструмента проксимальный участок 722’ пускового стержня может функционально взаимодействовать с другими приводными механизмами и системами, которые выполнены с возможностью приложения управляющих движений проксимальному участку 722’ пускового стержня. Узел 720' пускового стержня может также включать в себя дистальный участок 724' пускового стержня, который является, по меньшей мере, частично полым и функционально связан с концом выполненной с возможностью перемещения по оси приводной штанги 60 загрузочного блока 20, связанного с ней различными способами, описанными в настоящем документе. Например, дистальный участок 724' пускового стержня может иметь внутри проем 725, размеры которого позволяют дистальному участку 724' пускового стержня скользить по оси по проксимальному участку 722' пускового стержня на расстояние втягивания RDD. Расстояние втягивания может быть равно или больше пускового расстояния FD, чтобы позволять узлу 730' втягивания возвращать приводную штангу 60 на достаточное расстояние, чтобы перемещать ее рабочую головку 62 из конечного положения ЕР в исходное положение SP. См. ФИГ. 25. Узел 730' втягивания может содержать защелку 732' втягивания. Защелка 732' втягивания может включать в себя ручку 735 защелки, который может перемещаться между положением блокировки (ФИГ. 25 и 26) и незаблокированным положением (ФИГ. 27 и 28). В положении блокировки защелка 732' втягивания фиксирует дистальный участок 724' пускового стержня, препятствуя его скольжению по оси по проксимальному участку 722' пускового стержня и дистальному участку 724' пускового стержня. В таком положении проксимальный участок 722' пускового стержня по существу перемещается единым блоком. Таким образом, в положении блокировки узел 720' пускового стержня может подаваться в дистальном направлении DD в его конечное положение ЕР, как показано на ФИГ. 26. При заедании приводной штанги 60 или сбоя или прекращения подачи электропитания на инструмент во время пускового хода (или по другим причинам) врач может просто перевести ручку 735 защелки втягивания в незаблокированное положение (ФИГ. 27), а затем вручную подать защелку 732' втягивания в проксимальном направлении PD, как показано на ФИГ. 28.
Описанные в настоящем документе различные системы и механизмы втягивания позволяют избавиться от ряда недостатков, с которыми приходилось часто сталкиваться в ранее использовавшихся механизмах втягивания, применявшихся для втягивания приводных элементов с электроприводом в хирургических концевых эффекторах. Например, различные механизмы втягивания, описанные в настоящем документе, могут облегчать приложение возвратных движений вручную к приводным элементам и/или связанным с ними приводным механизмам без какого-либо противодействия, обычно возникающего в механизмах зубчатой передачи/трансмиссии, соединенных с двигателем, при этом механизмы зубчатой передачи/трансмиссии остаются связанным с двигателем приводным образом или физически.
Таким образом, по меньшей мере, в одном примере рассматривается хирургический инструмент, который может включать в себя узел пускового элемента, который может содержать участок, зафиксированный для селективного перемещения по оси в дистальном направлении и проксимальном направлении. Инструмент может дополнительно включать в себя приводной блок, который содержит двигатель, включающий в себя вал двигателя. Узел зубчатой передачи может быть связан приводным образом с валом двигателя и включать в себя узел выходного вала, который выполнен с возможностью взаимодействия с узлом пускового элемента так, что при повороте вала двигателя в первом направлении вращения участок узла пускового стержня приводится в движение по оси в дистальном направлении, а при повороте вала двигателя во втором направлении вращения участок пускового элемента приводится в движение по оси в проксимальном направлении. Хирургический инструмент дополнительно может содержать узел втягивания, который взаимодействует с узлом пускового элемента, чтобы вручную сообщать другие вращательные движения узлу пускового элемента во втором направлении вращения при отключении двигателя. Хирургический инструмент дополнительно может содержать средство блокировки, которое взаимодействует с узлом втягивания, и приводной блок для предотвращения передачи других вращательных движений на вал двигателя в то время, когда узел зубчатой передачи остается связанным приводным образом с валом двигателя.
В соответствии с еще одним примером хирургический инструмент может содержать приводной блок для обеспечения пусковых и возвратных движений. Инструмент может дополнительно содержать хирургический концевой эффектор, который выполнен с возможностью выполнения, по меньшей мере, одной хирургической функции в ответ на приложение к нему, по меньшей мере, одного из пусковых и возвратных движений. Хирургический инструмент дополнительно может содержать узел пускового элемента, который может включать в себя проксимальный участок пускового элемента, который находится в функциональном взаимодействии с приводным блоком и выполнен с возможностью функционального приема от него вращательных пусковых движений. Узел пускового элемента может дополнительно содержать дистальный участок пускового элемента, который дистально зафиксирован на проксимальном участке пускового элемента и выполнен с возможностью передачи пусковых и возвратных движений хирургическому концевому эффектору. Узел втягивания может быть функционально связан с проксимальным участком пускового элемента и дистальным участком пускового элемента. Узел втягивания может быть выполнен с возможностью селективного перемещения между неактивированным положением, в котором узел втягивания выполнен с возможностью передачи пусковых и возвратных движений от проксимального участка пускового элемента на дистальный участок пускового элемента, и активированным положением, в котором дистальный участок пускового элемента перемещен по оси относительно проксимального участка пускового элемента.
Другой пример хирургического инструмента может содержать корпус рукоятки, в котором находится функционально связанный с ним узел удлиненного ствола. На узле удлиненного ствола может быть закреплен пусковой стержень, выполненные с возможностью перемещения по оси. Загрузочный блок может быть функционально связан с удлиненным стволом и выполнен с возможностью контакта с пусковым стержнем. Приводная трубка может крепиться с возможностью поворота в корпусе рукоятки и функционально контактировать с пусковым стержнем. Хирургический инструмент может дополнительно содержать двигатель, который имеет вал двигателя. Двигатель может функционально устанавливаться в корпусе рукоятки и может быть функционально связан с источником электропитания. Узел зубчатой передачи может быть связан приводным образом с валом двигателя и включать в себя узел выходного вала, который выполнен с возможностью взаимодействия с приводной трубкой так, что при повороте вала двигателя в первом направлении вращения приводная трубка приводит пусковой стержень в движение в дистальном направлении, а при повороте вала двигателя во втором направлении вращения приводная трубка приводит пусковой стержень в движение в проксимальном направлении. Узел втягивания может взаимодействовать с приводной трубкой для приложения к ней других вращательных движений вручную во втором направлении вращения при отключении двигателя. Cредство блокировки может взаимодействовать с узлом втягивания и узлом зубчатой передачи для предотвращения передачи других вращательных движений на вал двигателя в то время, когда узел зубчатой передачи остается связанным приводным образом с валом двигателя.
Как показано на ФИГ. 1-3, в различных вариантах осуществления двигатель 100 хирургического инструмента 10 может быть функционально связан с пусковым элементом, таким как пусковой элемент 60, и может приводить в движение пусковой элемент 60 через концевой эффектор или ОЗБ 20 в процессе пускового хода. Например, пусковой элемент 60 может рассекать ткань и/или устанавливать скобки в ткани во время пускового хода. Например, аккумулятор может подавать ток на двигатель 100, и ток, подаваемый на двигатель 100, может определять крутящий момент, создаваемый двигателем 100. Более того, крутящий момент, создаваемый двигателем 100, может определять пусковое усилие, прикладываемое пусковым элементом 60. Напряжение на двигателе, например, может определять угловую скорость вращения двигателя 100, которая может определять скорость движения пускового элемента 60. Как показано на ФИГ. 63, двигатель может определять кривую крутящий момент-напряжение 5802. В различных вариантах осуществления кривая крутящий момент-напряжение 5802 может иметь максимум крутящего момента T1 при оптимизированном напряжении V. При напряжениях, которые, например, выше и/или ниже оптимизированного напряжения V, крутящий момент, создаваемый двигателем, может быть меньше максимального крутящего момента T1. Например, при напряжении 1/2 В кривая крутящий момент-напряжение 5802 может иметь значение крутящего момента T2, которое, например, может быть меньше T1.
В различных вариантах осуществления система управления, которая находится в сигнальной связи с двигателем, может подавать ток от аккумулятора на двигатель. В некоторых вариантах осуществления система управления может включать в себя контроль управления скоростью, который может регулировать, например, скорость пускового элемента. Система управления может включать в себя, например, цепь переменного сопротивления и/или цепь регулирования напряжения, которая может управлять током и/или напряжением, подаваемым на двигатель. В таких вариантах осуществления система управления может регулировать крутящий момент и/или угловую скорость двигателя, и, таким образом, пусковое усилие и/или скорость движения пускового элемента, связанного с двигателем. Например, цепь регулирования напряжения может управлять напряжением на двигателе, чтобы влиять на скорость движения пускового элемента. Как показано на ФИГ. 63, если цепь регулирования напряжения снижает напряжение от идеального значения V до 1/2V, например, крутящий момент может уменьшаться до T2, что может быть меньше максимального крутящего момента T1, а скорость, например, может корректироваться до величины S2.
В различных вариантах осуществления система управления может включать в себя схему широтно-импульсной модуляции, и система управления может подавать импульсы тока на двигатель. Как показано преимущественно на ФИГ. 64(а)-65(b), импульсы тока могут подаваться при постоянном напряжении. В различных вариантах осуществления цикл нагрузки импульсов, т. е. продолжительность импульсов в течение интервала или периода, может влиять на скорость пускового элемента 5804. Если коэффициент заполнения цикла нагрузки выше (ФИГ. 64(а)), каждый импульс может представлять собой более продолжительную часть интервала, и, в результате, двигатель может приводить в движение пусковой элемент 5804, например, с более высокой скоростью S1. Если коэффициент заполнения цикла нагрузки ниже (ФИГ. 64(b)), каждый импульс может представлять собой более короткую часть интервала, и, в результате, двигатель может приводить в движение пусковой элемент 5804, например, с более низкой скоростью S3. В различных вариантах осуществления схема широтно-импульсной модуляции может обеспечивать передачу импульсов тока на двигатель при оптимизированном напряжении V (ФИГ. 63) двигателя. В таких вариантах осуществления скорость пускового элемента 5804 может регулироваться без снижения крутящего момента, создаваемого двигателем. Например, двигатель может работать, при оптимизированном значении напряжения V, чтобы создавать максимальный крутящий момент T1, и пусковой элемент 5804 может, например, приводиться в движение через концевой эффектор при пониженной скорости, например, при такой скорости, как S3, и/или любой подходящей скорости за счет изменения ширины импульсов напряжения.
В различных вариантах осуществления аккумулятор может иметь вольтамперный предел или предел мощности. Иными словами, аккумулятор может передавать ограниченное количество энергии в единицу времени. Предел мощности аккумулятора может определяться конструкцией аккумулятора и/или цепи. Например, термические ограничения аккумулятора и/или цепи, такие как, например, теплоемкость и/или изоляция проводов, могут влиять на предел мощности. Кроме того, предел мощности аккумулятора может ограничивать величину тока, подаваемого на двигатель. В различных вариантах осуществления двигатель с использованием управления регулировки скорости, такого как, например, широтно-импульсная модуляция, может и не требовать максимальной вольтамперной нагрузки аккумулятора. Например, если аккумулятор подает импульсы тока при максимальном или оптимизированном напряжении, чтобы привести в действие пусковой элемент при желаемой скорости и максимальном или оптимизированном крутящем моменте, для привода пускового элемента может не использоваться дополнительный ток. В таких вариантах осуществления изобретения дополнительный ток может использоваться для создания дополнительного крутящего момента. Например, как показано на ФИГ. 66(а)-66(с), двигатель может включать в себя дополнительный или вторичный комплект катушек, и дополнительный ток может селективно подаваться на дополнительный комплект катушек, чтобы создавать дополнительный крутящий момент. В таких вариантах осуществления двигатель, например, может создавать более высокие значения крутящего момента при более низких скоростях. В различных вариантах осуществления система управления может максимально увеличивать дополнительный ток, подаваемый на вторичный комплект катушек, например, в зависимости от вольтамперного предела аккумулятора. Кроме того, в определенных вариантах осуществления система управления может оптимизировать крутящий момент, создаваемый двигателем в течение, по меньшей мере, части пускового хода.
Как показано на ФИГ. 66(а)-66(с), аккумулятор 6002 может селективно подавать ток на двигатель 6004. Двигатель 6004 может, например, включать в себя первичный комплект 6006 катушек и вторичный комплект 6008 катушек. В различных вариантах осуществления система 6020 управления, которая находится в сигнальной связи с двигателем 6004, может селективно направлять ток на первичный комплект 6006 катушек и/или на вторичный комплект 6008 катушек. Например, система 6020 управления может подавать ток на первичный комплект 6006 катушек во время первого рабочего состояния и может, например, подавать ток на первичный комплект 6006 катушек и вторичный комплект 6008 катушек во время второго рабочего состояния. В различных вариантах осуществления переключатель, например, такой как переключатель 6010, может перемещаться между открытым положением и закрытым положением, чтобы селективно подавать ток, например, на вторичный комплект 6008 катушек. В различных вариантах осуществления комплекты 6006, 6008 катушек могут активироваться независимым образом. Кроме того, система 6020 управления может включать в себя схему 6022 широтно-импульсной модуляции, и аккумулятор 6002 может подавать импульсы тока, например, по меньшей мере, на один комплект 6006, 6008 катушек. В различных вариантах осуществления первичный комплект 6006 катушек может быть связан с первой цепью 6030 (ФИГ. 66(а)), а второй комплект катушек может быть связан со второй цепью 6032 (ФИГ. 66(а)), которая не зависит от первой цепи 6030. В других вариантах осуществления первичный и вторичный комплекты 6006, 6008 катушек могут быть подключены, например, параллельно (ФИГ. 66(b)) или последовательно (ФИГ. 66(c)). В некоторых вариантах осуществления двигатель 6004 может, например, включать в себя, по меньшей мере, один дополнительный комплект первичных катушек и/или, по меньшей мере, один дополнительный комплект вторичных катушек.
В различных вариантах осуществления двигатель может создавать первую величину крутящего момента в первом рабочем состоянии и вторую величину крутящего момента во втором рабочем состоянии. Вторая величина крутящего момента, например, может быть больше первой величины крутящего момента. Более того, дополнительный крутящий момент, создаваемый вторичным комплектом 6006 катушек во втором рабочем состоянии, может не допускать и/или ограничивать блокировку пускового элемента во время пускового хода. Например, как показано на ФИГ. 67, двигатель может приводить в действие пусковой элемент дистально во время первого рабочего состояния и может приводить пусковой элемент в действие проксимально во время второго рабочего состояния. В различных вариантах осуществления двигатель может создавать больший по величине крутящий момент при втягивании пускового элемента, чем при выдвижении пускового элемента. В таких вариантах осуществления втягивание пускового элемента может быть более эффективным. При заедании пускового элемента, например, если ткань является слишком толстой и/или жесткой для разрезания и/или сшивания скобками с помощью пускового элемента, дополнительный крутящий момент, например, может использоваться для втягивания пускового элемента. Как показано на ФИГ. 66, крутящий момент, создаваемый двигателем, может постепенно увеличиваться на фазе «плавного» пуска 5902 пускового хода и/или может постепенно уменьшаться на фазе «плавной» остановки 5904, 5906 пускового хода. Например, при выдвижении пускового элемента двигатель может пошаговым образом или медленно увеличивать пусковую скорость в начале пускового хода и может пошаговым образом или постепенно снижать пусковую скорость, после того как пусковой элемент проходит участок подачи пускового хода. Более того, в различных вариантах осуществления двигатель может мгновенно или по существу мгновенно создавать максимальный крутящий момент и/или скорость при втягивании пускового элемента. Двигатель может использовать дополнительный комплект 6008 катушек (ФИГ. 65(а)-(с)), чтобы добиться максимума крутящего момента, создаваемого, например, в начале втягивания.
Как показано на ФИГ. 68, система управления может регулировать перемещение пускового элемента с более низкой скоростью в течение сегмента 5912 ограничения скорости пускового хода. Например, при подаче пускового элемента такой пусковой элемент может вначале перемещаться с меньшей скоростью, чтобы гарантировать правильность выбора и/или размещения концевого эффектора, подходящего для целевой ткани. Кроме того, как более подробно описано в настоящем документе, хирург может привести в действие исполнительный механизм, например, такой как переключатель или кнопка, чтобы включить двигатель и инициировать открытие и закрытие бранш концевого эффектора, перемещение пускового элемента и/или шарнирный поворот, например, загрузочного блока. Начало сегмента ограничения скорости, например, такого как сегмент 5912 ограничения скорости, приведенный на ФИГ. 68, при включенном исполнительном элементе и в начале приводимой в действие двигателем операции может позволить хирургу «проверить» хирургическую процедуру, чтобы убедиться в начале выполнения предполагаемой и/или надлежащей хирургической процедуры. Например, в некоторых вариантах осуществления первая кнопка может включать приводимый от двигателя шарнирный поворот в первом направлении, а вторая кнопка может включать приводимый от двигателя шарнирный поворот во втором направлении. Если хирургический инструмент поворачивается и/или ориентирован «вверх ногами», положение первой и второй кнопок может поворачиваться и/или меняться на обратное по сравнению со стандартным размещением, рассматриваемым со стороны оператора. Если первое направление является выбранным направлением шарнирного поворота, может быть желательно обеспечить шарнирный поворот загрузочного блока в первом направлении, т. е. чтобы первая кнопка действительно нажималась во время сегмента ограничения скорости. Аналогично, если второе направление является выбранным направлением шарнирного поворота, может быть желательно обеспечить шарнирный поворот загрузочного блока во втором направлении, т. е. чтобы вторая кнопка нажималась во время сегмента ограничения скорости. В определенных вариантах осуществления сегмент ограничения скорости в течение начальной части хирургической процедуры может обеспечить хирургу достаточное время для изменения и/или модифицирования хирургической процедуры, если была инициирована нежелательная хирургическая процедура. Как более подробно описано в настоящем документе, схема широтно-импульсной модуляции, например, такая как схема 6022 широтно-импульсной модуляции, может обеспечивать выполнение сегмента ограничения скорости во время начальной части хирургической процедуры.
Как описано выше, контроллер двигателя может быть выполнен с возможностью использовать широтно-импульсную модуляцию для управления двигателем 6004. В различных вариантах осуществления контроллер двигателя может использовать такую же широтно-импульсную модуляцию, например, для первичного комплекта 6006 катушек и вторичного комплекта 6008 катушек. В других вариантах осуществления контроллер двигателя может использовать первый сигнал широтно-импульсной модуляции для первичного комплекта 6006 катушек и второй, или отличающийся, сигнал широтно-импульсной модуляции для вторичного комплекта 6008 катушек. В некоторых случаях контроллер двигателя может использовать сигнал широтно-импульсной модуляции для одного из комплектов 6006, 6008 катушек, но не для другого комплекта катушек. Более того, описанную в настоящем документе информацию можно адаптировать для двигателей, имеющих более двух комплектов катушек. Например, контроллер двигателя может использовать множество сигналов широтно-импульсной модуляции для управления множеством комплектов катушек.
В различных вариантах осуществления двигатель может представлять собой приводной щеточный двигатель постоянного тока или, например, приводной бесщеточный двигатель постоянного тока. В некоторых вариантах осуществления двигатель может представлять собой шаговый двигатель, например, такой как гибридный шаговый двигатель. Шаговые двигатели могут обеспечивать регулирование поворота так, что отсутствует необходимость в использовании датчика углового поворота. Отказ от использования датчика углового поворота может снизить затраты и/или, например, сложность конструкции двигателя. Как показано на ФИГ. 69 и 70, двигатель может представлять собой упрощенный шаговый двигатель. Например, двигатель может содержать четыре электромагнитных полюса, разнесенных по периметру. Как показано на ФИГ. 71-74(с), двигатель может представлять собой гибридный шаговый двигатель. Гибридный шаговый двигатель может содержать постоянные магниты и, например, переменные магниты.
В ранее предлагаемых конструкциях хирургических инструментов, описанных, например, в публикациях Zemlok ‘763 и Zemlok ‘344, использовались два отдельных двигателя. Один двигатель, например, используется для выдвижения приводного элемента дистально через загрузочный блок, что приводит к закрытию упора, разрезанию ткани и установке скобок из кассеты со скобками, расположенной в загрузочном блоке. Другой двигатель используется для шарнирного поворота загрузочного блока вокруг шарнирного сочленения. Дополнительная информация относительно двигателей, используемых в механизмах шарнирного поворота загрузочного блока, также представлена в патенте США № 7,431,188, полное содержание которого полностью включено в настоящий документ путем ссылки. Применение двух двигателей в таких устройствах может повышать уровень сложности и увеличивать общую стоимость хирургического инструмента. Например, такого рода конструкции могут удваивать число систем втягивания и других механизмов, в процессе применения которых возможен отказ. В хирургическом инструменте 810, описанном на ФИГ. 29-31, используется один двигатель, который может селективно применяться для срабатывания и шарнирного поворота хирургического концевого эффектора, выполненного с возможностью выполнения, по меньшей мере, одного хирургического вмешательства в ответ на приложенные к нему пусковые движения.
Например, по меньшей мере, в одной форме в хирургическом инструменте 810 могут использоваться многие из тех же компонентов, которые применялись в различных хирургических инструментах, подробно описанных в настоящем документе. Например, хирургический инструмент 810 включает в себя корпус 12, в котором функционально размещен двигатель 100, который выполнен с возможностью обеспечения вращательных пусковых движений. Двигатель 100 функционально связан с узлом 820 зубчатой передачи, который имеет связанный с ним узел 840 соединителя привода, который выполнен с возможностью селективной установки и который будет более подробно описан ниже. Хирургический инструмент 810 может дополнительно включать в себя систему шарнирного соединения, которая по существу обозначается как элемент 859 и функциональным образом взаимодействует с узлом удлиненного ствола для приложения движений шарнирного поворота к хирургическому концевому эффектору. Например, в одной форме система 859 шарнирного соединения может включать в себя приводной механизм шарнирного поворота, по существу обозначаемый как элемент 860, который может быть по существу аналогичен тем приводным механизмам шарнирного поворота, которые описаны в публикациях Zemlok ‘763 и/или Zemlok ‘344 и/или патенте США № 7,431,188, за исключением описанных ниже различий. Например, корпус 12 может включать в себя цилиндрическую часть 90, которая содержит установленный на ней вращающийся элемент 92. Вращающийся элемент 92 может взаимодействовать с проксимальным концом узла удлиненного ствола, чтобы упрощать поворот узла удлиненного ствола относительно корпуса 12. Вращающийся элемент 92 может функционально фиксировать ручку шарнирного поворота и механизм муфты скольжения, как это описано в патенте США № 7,431,188. Главная шестерня 94 шарнирного поворота такого механизма представлена штриховыми линиями на ФИГ. 29 и 30. Главная шестерня 94 шарнирного поворота может быть соединена с главным валом 95 посредством муфты скольжения, как описано в упомянутом выше патенте США № 7,431,188 так, что поворот главной шестерни 94 шарнирного поворота будет приводить к соответствующему повороту главного вала 95. Как более подробно описано в настоящем документе, ручка шарнирного поворота может выступать в качестве индикатора положения шарнирного сочленения. Главный вал 95 функционально взаимодействует с J-образным элементом 96, который функционально взаимодействует с проксимальным концом узла 97 шарнирной тяги. В одной форме узел 97 шарнирной тяги может содержать проксимальную шарнирную тягу 98, которая взаимодействует с шарнирной тягой 70 (ФИГ. 3) в загрузочном блоке 20.
Механизм 860 шарнирного поворота может дополнительно включать в себя приводной механизм 870 шарнирного поворота, который функционально взаимодействует с главной шестерней 94 шарнирного поворота и узлом 840 соединителя привода. Как можно видеть на ФИГ. 29 и 30, приводной механизм 870 шарнирного поворота может включать в себя приводной вал 872 шарнирного поворота, который соединен с выходом узла 840 соединителя привода, как это будет более подробно описано ниже. Первая приводная шестерня 873 шарнирного поворота соединена с приводным валом шарнирного поворота и находится в зубчатом зацеплении с центральной зубчатой дорожкой 875 на второй шестерне передачи 874 шарнирного поворота, которая с возможностью поворота крепится на вращающемся элементе 92. Следовательно, поворот первой приводной шестерни 873 шарнирного поворота приводит к повороту второй центральной шестерни 874 передачи шарнирного поворота. Как можно также видеть на ФИГ. 29 и 30, «третья» шестерня 877 вала шарнирного поворота устанавливается на втором вале 876 шарнирного поворота, на котором находится «четвертая» червячная передача 878 шарнирного поворота. Третья шестерня 877 вала шарнирного поворота находится в зубчатом зацеплении со второй центральной шестерней 875 передачи шарнирного поворота так, что поворот первой приводной шестерни 873 шарнирного поворота в конечном счете приводит к повороту третьей шестерни 877 ствола шарнирного поворота и второго ствола 876 шарнирного поворота. Четвертая червячная передача 878 шарнирного поворота находится в зубчатом зацеплении с главной шестерней 94 шарнирного поворота так, что поворот четвертой червячной передачи 878 шарнирного поворота приводит к повороту главной приводной шестерни 94 шарнирного поворота и в конечном счете передает движения шарнирного поворота на узел 97 шарнирной тяги. Как будет более подробно описано ниже, приводной вал 872 шарнирного поворота поворачивается двигателем 100, если узел 840 соединителя привода находится в положении контроля шарнирного поворота.
Как можно видеть на ФИГ. 31, двигатель 100 функционально связан с узлом 820 зубчатой передачи. Узел 820 зубчатой передачи может включать в себя корпус 822 редуктора, который связан с двигателем 100. Например, корпус 822 редуктора может быть связан с корпусом 101 двигателя винтами 103 или другими механическими крепежными элементами и/или механизмами крепления. Узел 820 зубчатой передачи может включать в себя блок 821 планетарной передачи, который функционально связан с валом 107 двигателя. Например, в одном варианте установки кольцевая шестерня 823 может быть образована на внутренней поверхности корпуса 822 редуктора. Ведущая центральная шестерня 821 связана с валом 107 двигателя. Ведущая центральная шестерня 821 находится в зубчатом зацеплении с множеством первых планетарных шестерен 825, которые крепятся на первом водиле 824 планетарных шестерен так, что они также находятся в зубчатом зацеплении с кольцевой шестерней 823. Первая центральная шестерня 826 образована или иным образом закреплена на первом водиле 824 планетарных шестерен и находится в зубчатом зацеплении со вторыми планетарными шестернями 828, которые крепятся на втором водиле 827 планетарных шестерен. Вторые планетарные шестерни 828 также закреплены в зубчатом зацеплении с кольцевой шестерней 823. Вторая центральная шестерня 829 образована или иным образом закреплена на втором водиле 827 планетарных шестерен и находится в зубчатом зацеплении с множеством третьих планетарных шестерен 831. Третьи планетарные шестерни 831 находятся на третьем водиле 830 планетарных шестерен и в зубчатом зацеплении с кольцевой шестерней 823. Третья центральная шестерня 833 образована или иным образом закреплена на удлинении 832 вала на третьем водиле 830 планетарных шестерен и находится в зубчатом зацеплении с множеством четвертых планетарных шестерен 835, которые связаны с шестерней соединителя, которая содержит четвертое водило 834 планетарных шестерен, которое крепится с возможностью поворота на удлинении 832 вала. Кроме того, упорный подшипник 836 может устанавливаться на удлинении 832 вала между четвертым водилом 834 планетарных шестерен. Множество четвертых планетарных шестерен 835 находится в зубчатом зацеплении с блоком 850 выходного вала, который с возможностью поворота крепится на корпусе 822 редуктора. Как можно видеть на ФИГ. 30, второй упорный подшипник 836 может быть установлен между четвертыми планетарными шестернями и блоком 850 выходного вала. Четвертые планетарные шестерни 835 находятся в зубчатом зацеплении с зубчатой дорожкой 854.
В приведенных примерах осуществления блок 850 выходного вала функционально связан со сцеплением 230 такого типа и конструкции, как описано в публикации Zemlok ‘763, которая полностью включена в настоящий документ путем ссылки. В этой публикации можно найти дополнительные подробности относительно конструкции и работы такого сцепления 230. Однако в альтернативном варианте осуществления сцепление 230 может заменяться соединителем двух стволов или гильзой, которые служат для обеспечения соединения блока 850 выходного вала непосредственно с приводной трубкой 102.
Как показано на ФИГ. 31, главная шестерня 837 шарнирного поворота соединена с приводным валом 872 шарнирного поворота и находится в зубчатом зацеплении с внешним зубчатым кольцом 838 на четвертом водиле 834 планетарных шестерен. В различных формах узел 840 соединительного привода может дополнительно включать в себя элемент 842 соединителя селектора, который связан с возможностью перемещения или иным образом крепится с возможностью перемещения в корпусе 822 редуктора или в другом участке корпуса 812. По меньшей мере, в одной конструкции элемент 842 соединителя селектора может состоять из первого участка 844 ограничителя приводного вала и первого участка 846 ограничителя вала шарнирного поворота. Первый участок 844 ограничителя приводного вала содержит рифленую, шероховатую и т. п. поверхность, которая выполнена с возможностью неподвижного зацепления второго участка 845 ограничителя приводного вала на блоке 850 выходного вала. Аналогично первый участок 846 ограничителя вала шарнирного поворота содержит рифленую, шероховатую и т. п. поверхность, которая выполнена с возможностью неподвижного зацепления второго участка 847 ограничителя вала шарнирного поворота на четвертом водиле 834 планетарных шестерен.
Работа узла 840 соединителя будет понятна со ссылкой на ФИГ. 29 и 30. Как можно видеть на ФИГ. 29, элемент 842 соединителя селектора поворачивается в положение шарнирного поворота, в котором первый участок 846 ограничителя вала шарнирного поворота находится в неподвижном зацеплении со вторым участком 847 ограничителя вала шарнирного поворота на блоке 850 выходного вала. В этом положении заблокирован поворот блока 850 выходного вала вокруг продольной оси LA-LA. Следовательно, в этом положении работа двигателя 100 будет приводить к повороту третьей центральной шестерни 833, которая находится в зубчатом зацеплении с четвертыми планетарными шестернями 835. Поворот четвертых планетарных шестерен 835 будет приводить к повороту четвертого водила 834 планетарных шестерен, которое может свободно поворачиваться. Такой поворот четвертого водила 834 планетарных шестерен будет также приводить к повороту первичной шестерни 837 шарнирного поворота, которая связана с приводным валом 872 шарнирного поворота. Поворот приводного вала 872 шарнирного поворота будет вызывать поворот первой приводной шестерни 873 шарнирного поворота и приводить в движении вторую передаточную шестерню 874 шарнирного поворота. Поворот второй передаточной шестерни 874 шарнирного поворота приводит к повороту третьей передаточной шестерни шарнирного поворота и четвертой червячной передачи 878 шарнирного поворота. Поворот четвертой червячной передачи 878 шарнирного поворота будет приводить в движение главную шестерню 94 шарнирного поворота, что будет приводить к приложению осевых движений шарнирного поворота к тягам 97, 70 шарнирного поворота, что в конечном счете вызовет шарнирный поворот загрузочного блока 20 вокруг шарнирного сочленения. Поворот приводного вала 107 двигателя в первом направлении вращения будет вызывать шарнирный поворот загрузочного блока в первом направлении шарнирного поворота, а поворот приводного вала 107 двигателя в противоположном направлении вращения будет вызывать шарнирный поворот загрузочного блока во втором направлении шарнирного поворота, которое противоположно первому направлению шарнирного поворота.
Как затем показано на ФИГ. 30, элемент 842 соединителя селектора поворачивается в положение привода или срабатывания, в котором первый участок 844 ограничителя приводного вала находится в неподвижном зацеплении со вторым участком 845 ограничителя приводного вала на четвертом водиле 834 планетарных шестерен. В этом положении заблокирован поворот четвертого водила 834 планетарных шестерен вокруг продольной оси LA-LA. Следовательно, в этом положении работа двигателя 100 будет приводить к повороту третьей центральной шестерни 833. Третья центральная шестерня 833 находится в зубчатом зацеплении четвертыми планетарными шестернями 835, закрепленными на четвертом водиле 834 планетарных шестерен. Поскольку поворот четвертого водила 834 планетарных шестерен заблокирован за счет неподвижного зацепления между первым участком 846 ограничителя вала шарнирного поворота и вторым участком 847 ограничителя вала шарнирного поворота на четвертом водиле 834 планетарных шестерен, поворот четвертых планетарных шестерен 835 будет приводить к повороту блока 850 выходного вала. Блок 850 выходного вала может быть связан с приводной трубкой 102 через узел 230 сцепления или посредством прямого соединения. Следовательно, поворот блока 850 выходного вала приводит к повороту приводной трубки 102. Как описано выше, поворот приводной трубки 102 приводит к осевому перемещению пускового стержня (не показан на ФИГ. 31). Поворот приводного вала 107 двигателя в первом направлении вращения будет приводить к дистальному выдвижению пускового стержня, а поворот приводного вала 107 двигателя в противоположном направлении вращения будет вызывать проксимальное перемещение пускового стержня. В различных вариантах осуществления закрытие бранш загрузочного блока 20, например, при повороте узла 22 упора относительно держателя 24, может подключать и/или отключать двигатель 100 к системе шарнирного соединения и/или пусковой системе хирургического инструмента 10. Например, закрытие узла 22 упора относительно держателя 24 может отключать двигатель 100 от системы шарнирного соединения, например, от приводного вала 872 шарнирного поворота, и может подключать двигатель 100 к пусковой системе, например, к блоку 850 выходного вала. Более того, открытие узла 22 упора относительно держателя 24 может отключать двигатель 100 от пусковой системы и может подключать двигатель 100 к системе шарнирного соединения. В таких вариантах осуществления двигатель 100 может влиять на шарнирный поворот загрузочного блока 20, если загрузочный блок 20 находится в открытом состоянии, и двигатель 100 может влиять на пусковой ход пускового стержня, если загрузочный блок 20 находится в закрытом состоянии. Хирургический инструмент 10 может, например, содержать датчик и/или селектор. В некоторых вариантах осуществления датчик может обнаруживать закрытие бранш загрузочного блока 20. Более того, датчик может находиться в сигнальной связи с селектором, например, элементом 842 соединителя селектора. Селектор может подключать и/или отключать двигатель 100 от системы шарнирного соединения и/или пусковой системы при открытии и/или закрытии узла упора 22 относительно, например, держателя 24. Различные хирургические инструменты с электропитанием, в которых используются различные механизмы соединителя привода, описанные в настоящем документе, могут быть значительным усовершенствованием по сравнению с ранее предлагавшимися хирургическими инструментами с электропитанием, в которых используется множество двигателей для шарнирного поворота концевого эффектора и срабатывания приводного элемента концевого эффектора.
Например, по меньшей мере, один хирургический инструмент содержит узел удлиненного ствола, который определяет продольную ось инструмента. Хирургический концевой эффектор может быть функционально связан с узлом удлиненного ствола для селективного шарнирного поворота относительно него. Хирургический концевой эффектор, может быть выполнен с возможностью осуществления, по меньшей мере, одного хирургического вмешательства в ответ на приложенные к нему пусковые движения. Система шарнирного соединения может функционально взаимодействовать с узлом удлиненного ствола, чтобы прикладывать движения шарнирного поворота к хирургическому концевому эффектору. Узел пускового элемента может функционально взаимодействовать с узлом удлиненного ствола, чтобы прикладывать пусковые движения к хирургическому концевому эффектору. Хирургический инструмент может дополнительно содержать двигатель, который выполнен с возможностью создания вращательных пусковых движений. Узел соединителя привода может взаимодействовать с двигателем и системой шарнирного соединения так, что, если узел соединителя привода находится в первой конфигурации, двигатель будет прикладывать пусковые движения к системе шарнирного соединения, что вызовет шарнирный поворот хирургического концевого эффектора относительно продольной оси инструмента, а если узел соединителя привода находится во второй конфигурации, двигатель будет прикладывать пусковые движения к узлу пускового элемента, заставляя узел пускового элемента прикладывать, по меньшей мере, одно из пусковых движений к хирургическому концевому эффектору.
Другой пример хирургического инструмента может содержать рукоятку, в которой находится функционально связанный с ней узел удлиненного ствола, определяющий продольную ось инструмента. Загрузочный блок может быть функционально связан с узлом удлиненного ствола и выполнен с возможностью разрезания и сшивания ткани скобками в ответ на приложенные к нему пусковые движения. Загрузочный блок может быть выполнен с возможностью селективного шарнирного поворота относительно продольной оси инструмента вокруг шарнирного сочленения. Хирургический инструмент может дополнительно содержать систему шарнирного соединения, которая содержит узел тяги шарнирного поворота, закрепленный на узле удлиненного ствола и выполненный с возможностью функционального взаимодействия с участком шарнирного сочленения в одном элементе из узла удлиненного ствола и загрузочного блока. Приводной механизм шарнирного поворота может устанавливаться на рукоятке и взаимодействовать с узлом тяги шарнирного поворота, чтобы прикладывать к нему пусковые движения шарнирного поворота. Хирургический инструмент может дополнительно содержать узел пускового элемента, который функционально взаимодействует с загрузочным блоком, чтобы прикладывать к нему пусковые движения. Двигатель может функционально устанавливаться в рукоятки и может быть выполнен с возможностью обеспечения вращательных пусковых движений. Узел соединителя привода может входить в контакт с двигателем и приводным механизмом шарнирного поворота так, что, если узел соединителя привода находится в первой конфигурации, двигатель будет прикладывать пусковые движения к системе шарнирного соединения, что вызовет шарнирный поворот загрузочного блока относительно продольной оси инструмента, а если узел соединителя привода находится во второй конфигурации, двигатель будет сообщать пусковые движения узлу пускового элемента, заставляя узел пускового элемента прикладывать, по меньшей мере, одно из пусковых движений к загрузочному блоку.
В еще одном примере хирургический инструмент может содержать узел удлиненного ствола, который определяет продольную ось инструмента. Хирургический концевой эффектор может быть функционально связан с узлом удлиненного ствола для селективного шарнирного поворота относительно него. Хирургический концевой эффектор, может быть выполнен с возможностью осуществления, по меньшей мере, одного хирургического вмешательства в ответ на приложенные к нему пусковые движения. Система шарнирного соединения может функционально взаимодействовать с узлом удлиненного ствола, чтобы прикладывать движения шарнирного поворота к хирургическому концевому эффектору. Узел пускового элемента может функционально взаимодействовать с узлом удлиненного ствола, чтобы прикладывать пусковые движения к хирургическому концевому эффектору. Двигатель может быть выполнен с возможностью создания вращательных пусковых движений. Хирургический инструмент дополнительно может содержать средства для селективного приложения выходного движения от двигателя к каждому элементу из системы шарнирного соединения и узла пускового элемента.
В некоторых хирургических инструментах с электроприводом двигатель может обеспечивать тактильную обратную связь с оператором хирургического инструмента. Например, поворот двигателя может создавать вибрационное движение или шум, которые, например, могут зависеть от направления и/или скорости поворота двигателя. Однако различные типы двигателей могут создавать минимальный шум, и, таким образом, тактильная обратная связь с хирургом может быть ограниченной, и/или хирург может ее просто не воспринимать. Например, различные модификации и/или усовершенствования конструкции двигателя и/или трансмиссии могут снижать тактильный шум, создаваемый двигателем и/или трансмиссией. В таких вариантах осуществления, возможно, будет предпочтительно модифицировать двигатель и/или узел зубчатой передачи, функционально связанный с двигателем, чтобы создавать искусственную и/или преднамеренную тактильную обратную связь и/или иную сенсорную обратную связь. В некоторых вариантах осуществления хирургический инструмент может обеспечивать обратную связь с хирургом, причем хирургу не требуется отрывать взгляд от операционного поля. Например, двигатель и/или зубчатая передача могут создавать тактильную и/или слышимую обратную связь, чтобы передавать информацию хирургу. В таких вариантах осуществления оператору нет необходимости смотреть на устройство отображения, например, чтобы убедиться в работоспособном состоянии или ином состоянии хирургического инструмента. Как более подробно описано в настоящем документе, хирургический инструмент может передавать информацию о направлении поворота двигателя, например, которое может соответствовать направлению срабатывания пускового элемента и/или, например, направлению шарнирного поворота загрузочного блока. Кроме того, или альтернативно, хирургический инструмент может передавать информацию о скорости и/или положении пускового элемента, например, во время пускового хода, и/или о скорости и/или градусах угла, например, шарнирного поворота загрузочного блока.
В различных вариантах осуществления, как более подробно описано в настоящем документе, двигатель может быть функционально связан с пусковым узлом и/или шарнирным узлом. Как показано на ФИГ. 168, двигатель 7010 может приводить в движение вал 7014 двигателя, который, например, может входить в зацепление с узлом 7020 зубчатой передачи. В различных вариантах осуществления ключ, такой как ключ 7016 на валу 7014 двигателя, может входить в зацепление с участком узла 7020 зубчатой передачи. В некоторых вариантах осуществления, например, узел 7020 зубчатой передачи может включать в себя диски 7022, 7024, конструкция которых может позволять им поворачиваться или крутиться вместе с валом 7014 двигателя при зацеплении с ним посредством ключа. Например, первый диск 7022 может включать в себя канавку (не показана). Кроме того, первый ключ (не показан), проходящий из вала 7014 двигателя, может входить в зацепление с канавкой на первом диске 7022 так, что первый диск 7022 поворачивается по часовой стрелке (CW), если вал 7014 двигателя поворачивается в направлении CW, и поворачивается против часовой стрелки (CCW), если вал 7014 двигателя поворачивается в направлении CCW. По меньшей мере, в одном варианте осуществления первый ключ может оставаться в зацеплении с канавкой в первом диске 7022 в течение всей работы хирургического инструмента и/или его двигателя.
В некоторых вариантах осуществления первый диск 7022 может быть сбалансирован относительно своей оси поворота вместе с валом 7014 двигателя. Как показано на ФИГ. 168, грузик, например, такой как грузик 7026, может проходить из первого диска 7022 и может сдвигать центр тяжести первого диска 7022 от оси поворота первого диска 7022. Например, грузик 7026 может проходить в сторону от вала 7014 двигателя и/или в сторону от наружного периметра первого диска 7022. Иными словами, грузик 7026 может нарушать баланс первого диска 7022, приводить к вращательному дисбалансу первого диска 7022 и, тем самым, создавать центробежную силу при повороте первого диска 7022 с валом 7014 двигателя. Следовательно, поворот первого диска 7022 и грузика 7026 может обеспечивать тактильную обратную связь, например, такую как вибрация или биения корпуса хирургического инструмента и/или рукоятки. Тактильная обратная связь может соответствовать рабочему состоянию или условиям работы хирургического инструмента. Более того, тактильная обратная связь, создаваемая поворотом первого диска 7022 и грузика 7026, может зависеть от скорости поворота вала 7014 двигателя. В таких вариантах осуществления пусковая скорость и/или скорость шарнирного поворота могут также, например, передаваться хирургу. Например, первый диск 7022 может создавать тактильную обратную связь с более высокой частотой, если вал 7014 двигателя поворачивается быстрее, и с меньшей частотой, если вал 7014 двигателя поворачивается медленнее.
Аналогично первому диску 7022 в некоторых вариантах осуществления второй диск 7024 может быть сбалансирован относительно своей оси поворота с валом 7014 двигателя. Как показано на ФИГ. 168, грузик, например, такой как грузик 7028, может проходить из второго диска 7024 и может сдвигать его центр тяжести. Например, грузик 7028 может проходить в сторону от вала 7014 двигателя и/или в сторону от наружного периметра второго диска 7024. Иными словами, грузик 7028 может нарушать баланс второго диска 7024, приводить к вращательному дисбалансу второго диска 7024 и, таким образом, создавать центробежную силу при повороте второго диска 7024 с валом 7014 двигателя. Следовательно, поворот второго диска 7024 и грузика 7028 может обеспечивать тактильную обратную связь, например, такую как вибрация или биения корпуса хирургического инструмента и/или рукоятки. Тактильная обратная связь может соответствовать рабочему состоянию или условиям работы хирургического инструмента. Более того, тактильная обратная связь, создаваемая поворотом второго диска 7024 и грузика 7028, может зависеть от скорости поворота вала 7014 двигателя. В таких вариантах осуществления пусковая скорость и/или скорость шарнирного поворота могут также, например, передаваться хирургу. В различных вариантах осуществления первый и/или второй диски 7022, 7024 могут содержать дополнительные грузики, например, аналогичные грузикам 7026 и/или 7028, которые могут дополнительно способствовать формированию тактильного отклика, например, корпуса хирургического инструмента и/или рукоятки. Более того, в некоторых вариантах осуществления вал 7014 двигателя может находиться в функциональном взаимодействии с дополнительными и/или иными дисками узла 7120 зубчатой передачи, чтобы селективно формировать дополнительную и/или иную тактильную обратную связь.
Как показано на ФИГ. 168, второй диск 7024 может включать в себя внутренний периметр 7026. В различных вариантах осуществления второй ключ 7016 может проходить из вала 7014 двигателя и может входить в функциональное зацепление со вторым диском 7024 посредством внутреннего периметра 7030. Внутренний периметр 7030 может, например, содержать множество плоских поверхностей 7032 и множество дугообразных поверхностей 7034 между смежными плоскими поверхностями 7032. Каждая пара плоских и дугообразных поверхностей 7032, 7034 может определять канавку, структура которой может обеспечивать прием второго ключа 7016. В некоторых вариантах осуществления при повороте ключа 7016 в первом направлении этот ключ 7016 может упираться в плоскую поверхность 7032 и фиксироваться и/или удерживаться в канавке второго диска 7024. В такой конструкции второй диск 7024 может поворачиваться в первом направлении вместе с валом 7014 двигателя. Более того, в некоторых вариантах осуществления при повороте ключа 7016 во втором направлении, противоположном первому направлению, ключ 7016 может поворачиваться, проходя дугообразные поверхности 7034, и может фиксироваться и/или удерживаться в канавках внутреннего периметра 7030. Иными словами, ключ 7016 может поворачиваться относительно второго диска 7024. В такой конструкции вал 7014 двигателя может поворачиваться во втором направлении относительно второго диска 7024. Соответственно, ключ 7016 может входить в зацепление со вторым диском 7024 и заставлять второй диск 7024 поворачиваться, только если вал 7014 двигателя поворачивается в первом направлении. В некоторых вариантах осуществления первому направлению может соответствовать направление CW, а в других вариантах осуществления первому направлению может соответствовать направление CCW.
Как описано в настоящем документе, поскольку зацепление второго диска 7024 может зависеть от направления поворота вала 7014 двигателя, второй диск 7024 может поворачиваться только в том случае, если вал 7014 двигателя поворачивается в одном направления, например, если двигатель 7010 приводит в движение пусковой элемент в одном направлении и/или поворачивает загрузочный блок в одном направлении. Например, второй диск 7024 может поворачиваться, только если двигатель 7010 втягивает пусковой элемент, или, например, поворачивает загрузочный блок в направлении CW. Такое селективное зацепление второго диска 7024 может влиять на тактильную обратную связь, создаваемую хирургическим инструментом. Иными словами, другой и/или более ощутимый уровень тактильной обратной связи может обеспечиваться за счет селективного зацепления второго диска 7024. Например, в тех вариантах осуществления, где второй диск 7024 поворачивается только в тех случаях, когда двигатель 7010 поворачивается для втягивания пускового элемента, в процессе втягивания может формироваться более ощутимая тактильная обратная связь, чем в процессе выдвижения пускового элемента. В процессе втягивания второй диск 7024 может также способствовать формированию тактильной обратной связи, что может приводить к большему или существенно большему суммированию сил обратной связи. В таких вариантах осуществления более ощутимая тактильная обратная связь, создаваемая первым и вторым дисками 7022, 7024, может сообщать хирургу о том, что пусковой элемент втягивается двигателем 7010. В свете указанного выше, в различных вариантах осуществления первый диск 7022 может поворачиваться только в том случае, если вал 7014 двигателя поворачивается в одном направлении, и оба диска 7022, 7024 могут поворачиваться, если вал 7014 двигателя поворачивается в противоположном направлении. Таким образом, диски 7022, 7024 могут обеспечивать формирование различной обратной связи, если вал 7014 двигателя поворачивается в противоположных направлениях.
Как показано на ФИГ. 169, в некоторых вариантах осуществления двигатель 7010 может приводить в движение вал 7014 двигателя, который может входить в зацепление с узлом 7120 зубчатой передачи. В различных вариантах осуществления ключ, например, такой как ключ 7016 на валу 7014 двигателя, может входить в зацепление с узлом 7120 зубчатой передачи. Аналогично узлу 7020 зубчатой передачи узел 7120 зубчатой передачи может включать в себя множество дисков, например, первый диск 7122 и второй диск 7124. Конструкция первого и второго дисков 7122, 7124 может позволять им поворачиваться или крутиться с валом 7014 двигателя при селективном зацеплении с ним посредством ключа. Например, первый диск 7122 может включать в себя канавку (не показана). Кроме того, первый ключ (не показан), проходящий из вала 7014 двигателя, может входить зацепление с канавкой на первом диске 7122 так, что первый диск 7122 поворачивается с валом 7014 двигателя. В некоторых вариантах осуществления в процессе применения первый ключ может не выходить из зацепления с канавкой первого диска 7122. Второй диск 7124 может содержать внутренний периметр 7130 аналогично, например, внутреннему периметру 7030 второго диска 7024. Внутренний периметр 7130 может содержать множество плоских поверхностей 7132 и множество дугообразных поверхностей 7134. Как описано в настоящем документе для ФИГ. 168, ключ 7016 может селективно входить в зацепление и выходить из зацепления с внутренним периметром 7130 второго диска 7124 в зависимости от направления поворота вала 7014 двигателя. Например, если вал 7014 двигателя поворачивается в первом направлении, ключ 7016 может входить в зацепление со вторым диском 7124, заставляя второй диск 7124 поворачиваться с валом 7014 двигателя. Кроме того, при повороте вала 7014 двигателя во втором направлении ключ 7016 может оставаться вне зацепления со вторым диском так, что ключ 7016 может поворачиваться относительно второго диска 7024 внутри его внутреннего периметра 7130.
В различных вариантах осуществления первый диск 7122 может включать в себя, по меньшей мере, один зубец 7126, а второй диск 7124 может также включать в себя, по меньшей мере, один зубец 7128. При повороте дисков 7122, 7124 зубцы 7126, 7128 могут задевать элементы генератора 7140 звуковой обратной связи. Например, зубцы 7126, 7128 могут задевать кликеры 7142, 7144 генератора 7140 звуковой обратной связи. В различных вариантах осуществления зубец или зубцы 7126 первого диска 7122 могут задевать и отклонять первый кликер 7142 при повороте первого диска 7122, а зубец или зубцы 7128 второго диска 7124 могут задевать и отклонять второй кликер 7144 при повороте второго диска 7124. Воздействие и отклонение кликеров 7142, 7144 может вызывать резонансные колебания кликеров 7142, 7144 и формирование акустического сигнала. Иными словами, поворот первого и второго дисков 7122 может создавать звуковую обратную связь. Более того, скорость поворота поворотных дисков 7122, 7124 и/или количество и размещение зубцов, проходящих из первого и второго дисков 7122, 7124, может влиять на частоту акустического сигнала. Например, в таких вариантах осуществления скорость двигателя и соответствующая пусковая скорость пускового элемента и/или скорость шарнирного поворота загрузочного блока могут ощущаться хирургом.
Как показано преимущественно на ФИГ. 170 и 171, геометрические параметры зубцов 7126, 7128 могут влиять на акустические сигналы, которые создаются генератором 7140 звуковой обратной связи. Например, каждый из зубцов 7126, 7128 может содержать недемпфирующую поверхность 7150 и демпфирующую поверхность 7152. Недемпфирующая поверхность 7152 может, например, включать в себя плоскую поверхность, а демпфирующая поверхность 7152 может, например, включать в себя дугообразную поверхность. В различных вариантах осуществления, если недемпфирующая поверхность 7150 зубца 7126 при повороте предшествует демпфирующей поверхности 7152 зубца 7126 (ФИГ. 170), резонансные колебания кликера 7142 могут демпфироваться и/или останавливаться идущей следом демпфирующей поверхностью 7152 зубца 7126. Например, дугообразная геометрия демпфирующей поверхности 7152 может входить в контакт с отклоненным кликером 7126, чтобы предотвращать и/или ограничивать колебания или резонанс кликера 7126. Напротив, если демпфирующая поверхность 7152 зубца 7126 при повороте предшествует недемпфирующей поверхности 7150 зубца 7126 (ФИГ. 171), резонансные колебания кликера 7142 не будут демпфироваться недемпфирующей поверхностью 7150 зубца 7126. Например, плоская геометрия недемпфирующей поверхности 7150 может уходить от контакта и/или ограничивать контакт с отклоненным кликером 7126 так, что при этом создаются возможности и/или уменьшаются ограничения для резонансных колебаний кликера 7126. Иными словами, направление поворота дисков 7122, 1724 и соответствующих зубцов 7126, 7128 может влиять на акустическую обратную связь, создаваемую хирургическим инструментом. Соответственно, оператор хирургического инструмента может получать информацию о рабочем состоянии хирургического инструмента в процессе его применения, при этом хирургу не требуется отрывать взгляд от хирургического поля. Например, звуковые сигналы могут демпфироваться при втягивании пускового элемента и могут не демпфироваться при выдвижении пускового элемента. В других вариантах осуществления звуковые сигналы могут демпфироваться при выдвижении пускового элемента и могут не демпфироваться при втягивании пускового элемента. Более того, в некоторых вариантах осуществления демпфированные акустические сигналы могут соответствовать шарнирному повороту загрузочного блока в одном направлении, а недемпфированные акустические сигналы могут соответствовать, например, шарнирному повороту загрузочного блока в другом направлении. В различных вариантах осуществления, по меньшей мере, один генератор звуковой обратной связи может использоваться отдельно и/или в комбинации с, по меньшей мере, одной системой тактильной обратной связи. Более того, в некоторых вариантах осуществления, по меньшей мере, одна система тактильной обратной связи может использоваться отдельно и/или в комбинации с, по меньшей мере, одним генератором звуковой обратной связи. Звуковая и тактильная обратная связь могут информировать хирурга о различных условиях работы и/или, например, обеспечивать хирургу дублирующую обратную связь в отношении таких условий работы.
В различных вариантах осуществления хирургический инструмент может генерировать обратную связь, если пусковой элемент приближается к концу и/или доходит до конца пускового хода и/или если загрузочный блок приближается к пределу шарнирного поворота и/или доходит до такого предела. В различных вариантах осуществления такая обратная связь может отличаться и/или дополнять обратную связь, создаваемую в течение пускового хода и/или при шарнирном повороте загрузочного блока. Соответственно, хирургический инструмент может информировать оператора о том, что пусковой ход, например, приближается к завершению и/или завершен, и/или может информировать оператора о том, что загрузочный блок приближается к пределу шарнирного поворота и/или достиг предела шарнирного поворота.
Как показано на ФИГ. 172, двигатель 7010 и вал 7014 двигателя могут находиться в функциональном зацеплении с узлом 7120 шарнирной передачи, как более подробно описано ниже. Более того, диски 7122, 7124 узла 7120 зубчатой передачи могут входить в контакт с генератором 7240 звуковой обратной связи, который может быть, например, аналогичен генератору 7140 звуковой обратной связи. Например, зубцы 7126, 7128 на дисках 7122, 7124 могут отклонять кликеры 7242, 7244 генератора 7240 звуковой обратной связи, заставляя кликеры 7242, 7244 резонировать и создавать акустическую обратную связь. Кроме того, генератор 7240 звуковой обратной связи может перемещаться или поступательно перемещаться относительно узла 7120 зубчатой передачи. Как более подробно описано ниже, генератор 7240 звуковой обратной связи может селективно входить в зацепление и/или выходить из зацепления с кликерами 7242, 7244 на дисках 7122, 7124, чтобы селективно генерировать акустические сигналы. В других вариантах осуществления двигатель, узел зубчатой передачи и/или ее диски могут перемещаться так, что зубцы на дисках селективно входят и/или выходят из зацепления с кликерами генератора звуковой обратной связи для селективной генерации акустических сигналов.
В различных вариантах осуществления генератор 7240 звуковой обратной связи может поступательно перемещаться внутри хирургического инструмента по мере перемещения пускового элемента во время пускового хода. Например, в начале пускового хода генератор а7240 звуковой обратной связи может быть смещен относительно зубцов 7126, 7128 дисков 7122, 7124. Более того, по мере перемещения пускового элемента дистально и/или его приближения к концу пускового хода генератор 7240 звуковой обратной связи может перемещаться к совмещенному положению относительно зубцов 7126, 7128 дисков 7122, 7124 и/или в это положение. В таких вариантах осуществления генератор 7240 звуковой обратной связи может создавать акустическую обратную связь, если пусковой элемент приближается к концу пускового хода и/или достигает конца пускового хода. Как показано, например, на ФИГ. 173, генератор обратной связи может формировать обратную связь, если пусковой элемент находится в диапазоне положений вблизи и/или в конце пускового хода, например, чтобы информировать хирурга о положении пускового элемента. В таких вариантах осуществления хирургический инструмент может сообщать хирургу о завершении пускового хода. Например, как показано на ФИГ. 172, по меньшей мере, один зубец 7126, 7128 может совмещаться с, по меньшей мере, одним кликером 7242, 7244, по мере того как пусковой элемент приближается к дистальному концу пускового хода. В этот момент времени хирургический инструмент может формировать обратную связь, чтобы может сообщать хирургу о положении пускового элемента. Если каждый зубец 7126, 7128 совмещается с одним из кликеров 7242, 7242, хирургу может передаваться более ощутимая и/или иная обратная связь. Более того, при втягивании пускового элемента, по меньшей мере, один зубец 7126, 7128 может снова выходить из совмещения с кликером 7242, 7244 так, что хирургу может передаваться менее ощутимая и/или иная обратная связь. Соответственно, по мере перемещения генератора обратной связи во время пускового хода генератор обратной связи может передавать оператору различного рода обратную связь в зависимости от положения пускового элемента. Более того, узел 7120 зубчатой передачи может включать в себя дополнительные диски и/или зубцы, которые могут входить и/или выходить из зацепления с генератором 7240 звуковой обратной связи, и/или генератор 7240 звуковой обратной связи может включать в себя дополнительные кликеры, которые могут входить и/или выходить из зацепления с зубцами. В различных вариантах осуществления генератор звуковой обратной связи может сообщать хирургу об альтернативных и/или дополнительных положениях пускового элемента. Например, генератор звуковой обратной связи может передавать акустическую обратную связь в средней точке и/или в точках пошагового перемещения по длине пускового пути и/или пути втягивания.
Как показано на ФИГ. 174 и 175, генератор обратной связи, выполненный с возможностью перемещения, может также использоваться для сообщения хирургу предела шарнирного поворота загрузочного блока. Например, генератор 7240 звуковой обратной связи, показанный на ФИГ. 172, например, может поступательно перемещаться при шарнирном повороте загрузочного блока. Например, если загрузочный блок находится в конфигурации без шарнирного поворота, генератор 7240 звуковой обратной связи может быть смещен относительно зубцов 7126, 7128 дисков 7122, 7124. Более того, по мере шарнирного поворота загрузочного блока генератор 7240 звуковой обратной связи может перемещаться к совмещенному положению относительно зубцов 7126, 7128 дисков 7122, 7124 и/или в это положение. В таких вариантах осуществления генератор 7240 звуковой обратной связи может создавать акустическую обратную связь, если загрузочный блок приближается к пределу шарнирного поворота и/или достигает предела шарнирного поворота. Например, как показано на ФИГ. 174 и 175, генератор обратной связи может формировать обратную связь, если пусковой элемент находится в диапазоне положений вблизи и/или в конце пускового хода, например, чтобы информировать хирурга о положении пускового элемента. В таких вариантах осуществления хирургический инструмент может сообщать хирургу о пределе шарнирного поворота. Например, как показано на ФИГ. 172, по меньшей мере, один зубец 7126, 7128 может совмещаться с, по меньшей мере, одним кликером 7242, 7244, по мере того как загрузочный блок приближается к своему пределу шарнирного поворота, например, приближается к сорока пяти градусам. В этот момент времени хирургический инструмент может формировать обратную связь, чтобы может сообщать хирургу о положении пускового элемента. Если загрузочный блок приближается и/или доходит до предела шарнирного поворота, каждый зубец 7126, 7128 может совмещаться с одним из кликеров 7242, 7244, и хирургу может передаваться более ощутимая и/или иная обратная связь. Кроме того, при обратном шарнирном повороте загрузочного блока в нейтральное положение без шарнирного поворота, по меньшей мере, один зубец 7126, 7128 может снова выходить из совмещения с кликером 7242, 7244 так, что хирургу может передаваться менее ощутимая и/или иная обратная связь. Соответственно, по мере перемещения генератора обратной связи во время пускового хода генератор обратной связи может передавать оператору различного рода обратную связь в зависимости от конфигурации загрузочного блока.
В различных вариантах осуществления может быть предпочтительно защищать определенные компоненты хирургического инструмента от контакта с жидкостями. Например, случайный контакт с физиологическими жидкостями в процессе применения может повредить хирургический инструмент и может ограничивать и/или сокращать срок службы хирургического инструмента. Более того, может быть предпочтительно защищать определенные компоненты хирургического инструмента от контакта с жидкостями в процессе стерилизации. Например, случайный контакт со стерилизующими и/или чистящими жидкостями может повредить хирургический инструмент и может препятствовать и/или ограничивать возможность повторного применения хирургического инструмента. В различных вариантах осуществления определенные компоненты хирургического инструмента могут быть герметизированы и/или защищены от контакта с жидкостями. Например, электронные компоненты хирургического инструмента можно залить в эпоксидную смолу для защиты от жидкостей. Подвижные компоненты хирургического инструмента, например, такие как участки двигателя и/или узла зубчатой передачи, также могут герметизироваться и/или защищаться от контакта с жидкостью. Такая герметизация, например, может допускать поворот различных подвижных компонентов. Более того, в различных вариантах осуществления такая герметизация может также облегчать теплопередачу так, что тепло, образующееся при работе хирургического инструмента, рассеивается с большей эффективностью.
Как показано на ФИГ. 185 и 186, в некоторых вариантах осуществления двигатель 7510 и/или узел 7520 зубчатой передачи могут герметизироваться и/или защищаться от жидкостей в процессе применения и/или стерилизационной обработки. Двигатель 7510, например, может быть аналогичен двигателю 100, а узел 7520 зубчатой передачи, например, может быть аналогичен узлу 170 зубчатой передачи. Для герметизации и защиты двигателя 7510 вокруг двигателя 7510, например, может размещаться корпус двигателя, например, такой как резиновая гильза, внутри корпуса 12 (ФИГ. 1) хирургического инструмента 10 (ФИГ. 1). Такая резиновая гильза может ограничивать теплопередачу от двигателя 7510, и двигатель 7510 может быть подвержен перегреву. В других вариантах осуществления, как показано на ФИГ. 185 и 186, корпус двигателя, например, может содержать двустворчатую крышку 7516, которая может располагаться вокруг двигателя 7510. В различных вариантах осуществления двустворчатая крышка 7516 может включать в себя, по меньшей мере, два участка, которые могут быть соединены петлями и/или, например, фиксироваться защелкой. Двустворчатая крышка 7516 может обеспечивать поворот двигателя 7510 и/или вала двигателя. Кроме того, в некоторых вариантах осуществления двустворчатая крышка 7516 может способствовать теплопередаче от двигателя 7510, заключенного внутри этой крышки. Система 7512 контактов (ФИГ. 186), аналогичная системе 210 контактов, например, может использоваться для подачи электрического тока на двигатель 7510. Система 7512 контактов может включать в себя положительные и отрицательные кольцевые контакты 7514а, 7514b (ФИГ. 186), которые, например, могут функционально соединяться с фиксированными положительными и отрицательными контактами 7518а, 7518b (ФИГ. 186), например, расположенными на двустворчатой крышке 7516. Более того, двустворчатая крышка 7516 может содержать кольцевое уплотнение или прокладку 7519, которая может, например, поджимать периметр двигателя 7510 и герметизировать двигатель 7510 и систему 7512 контактов внутри двустворчатой крышки 7516. В некоторых вариантах осуществления двустворчатая крышка 7516 может содержать металлический материал, который, например, может способствовать теплопередаче от двигателя 7510 и может препятствовать перегреву и/или поломке двигателя 7410.
Как показано на ФИГ. 185 и 186, узел 7520 зубчатой передачи может герметизироваться и/или защищаться от жидкостей в процессе применения и/или стерилизационной обработки. Например, прокладка 7522 может располагаться между двигателем 7510 и корпусом узла 7520 зубчатой передачи так, что двигатель 7510 и узел 7520 зубчатой передачи образуют герметичное водонепроницаемое уплотнение. Кроме того, уплотняющая гильза 7530 может размещаться вокруг корпуса узла 7520 зубчатой передачи. Уплотняющая гильза 7530 может включать в себя кромку 7536, которая может упираться в двустворчатую крышку 7516 и/или двигатель 7510, чтобы обеспечивать герметичное водонепроницаемое уплотнение между ними. Уплотняющая гильза 7530 может также включать в себя отверстие 7532 для выходного вала 7524. Например, выходной вал 7524 узла 7520 зубчатой передачи может проходить через отверстие 7532, и ребра 7534 могут проходить к выходному валу 7524, чтобы обеспечивать герметичное водонепроницаемое уплотнение, одновременно допуская поворот выходного вала 7524 внутри отверстия 7532. В различных вариантах осуществления уплотняющая гильза 7530 и/или кромки 7536, прокладки и/или ее ребра 7534 могут содержать резину и/или другой подходящий материал для образования герметичного водонепроницаемого уплотнения. В различных вариантах осуществления монтажный кронштейн или ограничитель 7540 двигателя, например, аналогичный ограничителю 190, может удерживать герметичные узел 7520 зубчатой передачи и двигатель 7510 внутри корпуса 12 (ФИГ. 1) хирургического инструмента 10 (ФИГ. 1).
На ФИГ. 32-37 представлен другой пример хирургического инструмента 910, который может включать в себя многие из компонентов других хирургических инструментов, описанных в настоящем документе. По меньшей мере, в одной форме хирургический инструмент 910 может включать в себя приводной механизм шарнирного поворота, по существу обозначаемый как элемент 860, который может быть по существу аналогичен тем приводным механизмам шарнирного поворота, которые описаны в публикациях Zemlok ‘763 и/или Zemlok ‘344 и/или патенте США № 7,431,188, за исключением описанных ниже различий. В других конфигурациях хирургический инструмент может включать в себя различные формы других приводных механизмов шарнирного поворота, которые описаны в настоящем документе. Как можно видеть на ФИГ. 32, инструмент 910 включает в себя корпус 12, который может содержать цилиндрический монтажный участок 90, на котором устанавливается вращающийся элемент 92. Вращающийся элемент 92 находится в контакте с проксимальным концом узла 16 удлиненного ствола, чтобы обеспечивать поворот узла 16 удлиненного ствола относительно корпуса 12. Такое размещение позволяет врачу селективно поворачивать узел 16 удлиненного ствола и связанный с ним загрузочный блок 20 (или другую форму хирургического концевого эффектора) вокруг продольной оси LA-LA инструмента. Вращающийся элемент 92 может несъемно устанавливаться на цилиндрической части 90, или же его конструкция может предусматривать возможность его селективного отсоединения.
Как описано в настоящем документе, в зависимости от типа и/или конструкции используемого хирургического концевого эффектора может быть желательно подавать электрический ток на концевой эффектор. Например, в концевом эффекторе может (могут) использоваться датчик (-и), подсветка, исполнительный (-ые) механизм (механизмы) т. п., для работы которых требуется электропитание. Однако в таких конструкциях возможность поворота хирургического концевого эффектора вокруг продольной оси LA-LA инструмента может быть жестко ограничена, поскольку система проводников, передающих электропитание на хирургический концевой эффектор или загрузочный блок через удлиненный ствол от источника электропитания, может скручиваться и серьезно повреждаться - в частности, в тех случаях, когда удлиненный ствол поворачивается более чем на один оборот. В различных хирургических инструментах, описанных в настоящем документе, может использоваться система управления проводниками, по существу обозначаемая как элемент 930, которая позволяет устранить такие проблемы.
Как показано на ФИГ. 32, хирургический инструмент 910 может получать электропитание от источника 200 электропитания. Источник электропитания, может быть, например, такого типа, который более подробно описан в публикации Zemlok ‘763. Например, источник 200 электропитания может содержать перезаряжаемый аккумулятор (например, свинцовый, никелевый, литий-ионный и т. п.). Предполагается также, что источник 200 электропитания может включать в себя, по меньшей мере, один одноразовый аккумулятор. По меньшей мере, в одной конструкции напряжение одноразового аккумулятора может, например, составлять от около 9 Вольт до около 30 Вольт. На ФИГ. 32 показан один пример, в котором источник 200 электропитания включает в себя множество элементов 202 аккумулятора. Число используемых элементов аккумулятора может зависеть от потребностей в токовой нагрузке инструмента 910. Также допустимо, что источник электропитания может содержать источник переменного тока, имеющийся в операционной. Например, сетевой шнур и разъем внешнего питания (не показаны) могут использоваться для подачи переменного тока от розетки в операционной на различные компоненты, проводники, датчики, переключатели, схемы и т. п. в корпусе хирургического инструмента и/или концевом эффекторе. В других приложениях хирургический инструмент 910 может получать электропитание от, например, роботизированной системы, к которой он подсоединен или с которой иным образом связан.
Как можно видеть на ФИГ. 32, система 930 управления проводниками может содержать первичный проводящий элемент или провод 932, который связан или иным образом взаимодействует с источником 200 электропитания для приема от него электропитание. Первичный проводящий элемент 932 связан со спиралью, шпулькой и/или узлом 934 намотки проводника, который закреплен внутри вращающегося элемента 92. В одной конструкции, например, узел 934 спирального проводника может быть образован или может иным образом содержать плоский проводник 936, который спиральным образом наматывается, как показано, например, на ФИГ. 36 и 37. Например, узел 934 спирального проводника может быть сформирован из спирально намотанного проводника, который может обладать такими же характеристиками, как и спирально намотанная пружина, например, такая как торсионная пружина. В одной форме проводник 936 может, например, наматываться последовательными оборотами или витками, как показано на ФИГ. 36 и 37. В различных конструкциях проводник 936 может наматываться посредством одного или более полных оборотов. Например, проводник 936, показанный на ФИГ. 36 и 37, выполнен с возможностью совершения более четырех полных оборотов.
В различных формах проводник 936 имеет первый конец 938, который может быть, например, закреплен на цилиндрической части 90 корпуса 12. Кроме того, проводник 936 дополнительно имеет второй конец 940, который закреплен или иным образом соединен с вращающимся элементом 92 для вращательного движения вместе с ним. Таким образом, при повороте вращающегося элемента 92 в первом направлении вращения вокруг цилиндрической части 90 спирально намотанный проводник 936 наматывается более плотным образом. И наоборот, при повороте вращающегося элемента 92 во втором направлении вращения плотность намотки спирально намотанного проводника 936 может быть ослаблена. В тех конфигурациях, где вращающийся элемент 92 съемно установлен на цилиндрической части 90, первый конец 938 спирально намотанного проводника 936 может быть съемно закреплен в пазу или другой полости 942 для крепления в цилиндрической части 90. См., например, ФИГ. 36 и 37. Кроме того, первичный проводящий элемент 932 может быть съемно связан с узлом 934 спирального проводника с помощью узла 933 соединителя. В частности, узел 933 съемного соединителя может использоваться для соединения первичного проводящего элемента 932 с первым концом 938 спирально намотанного проводника 936, чтобы обеспечивать извлечение вращающегося элемента 92 из цилиндрической части 90. В других конструкциях, где не предполагается отделение вращающегося участка 92 от цилиндрической части, первый конец 938 спирально намотанного проводника 936 может несъемно фиксироваться на цилиндрической части 90, а первичный проводящий элемент 932 может быть постоянно закреплен (например, посредством пайки) на первом конце спирально намотанного проводника 936.
Второй конец 940 спирально намотанного проводника 936 может быть несъемно закреплен на вращающемся элементе 92 с помощью клея, механических ограничителей, элементов защелки и т. п. В альтернативных вариантах конструкции второй конец 940 спирально намотанного проводника 936 может быть съемно закреплен в пазу или другом фиксирующем элементе во вращающемся элементе 92, чтобы обеспечивать отсоединение спирально намотанного проводника 936 от вращающегося участка 92. Как можно видеть на ФИГ. 32 и 33, вторичный проводящий элемент 944 ствола соединен со вторым концом 940 узла 934 спирального провода. Вторичный проводящий элемент 944 ствола может быть закреплен внутри вращающегося элемента 92 и проходить через полый узел 16 удлиненного ствола. Например, вторичный проводящий элемент 944 ствола может проходить через узел 16 удлиненного ствола до его дистального конца, чтобы входить в контакт с другими проводниками, датчиками, компонентами с электропитанием и т. п., которые связаны с соединенными с ним хирургическим концевым эффектором, загрузочным блоком и т. п. Таким образом, когда врач поворачивает вращающийся элемент 92 относительно корпуса 12, узел 934 спирального проводника и, в частности, спирально намотанный проводник 936 будет навиваться в несколько более плотную спираль, одновременно обеспечивая подачу электропитания от источника 200 электропитания на хирургический концевой эффектор, загрузочный блок и т. п. Если врач поворачивает вращающийся элемент 92 относительно корпуса 12 в противоположном направлении, спирально намотанный кабель 936 будет несколько разматываться, одновременно по-прежнему обеспечивая подачу электропитания от источника 200 электропитания на различные компоненты, датчики и т. п. на хирургическом концевом эффекторе, загрузочном блоке и т. п.
Как можно также видеть на ФИГ. 34 и 35, система 930 управления проводниками может также включать в себя узел ограничителя вращения, по существу обозначаемый как элемент 950. По меньшей мере, в одной конструкции узел 950 ограничителя вращения, например, содержит элемент 952 ограничителя, который закреплен на вращающемся элементе 92 с возможностью перемещения и выполнен с возможностью резьбового зацепления с резьбовым участком 99 на цилиндре 90 корпуса 12. Ограничитель 952 может включать в себя пару противоположных выступов 954, которые располагаются с каждой стороны осевого ребристого участка 958, образованного на вращающемся элементе 92, как показано на ФИГ. 33. Такая конструкция позволяет ограничителю 952 перемещаться по оси внутри вращающегося элемента 92 по мере поворота вращающегося элемента 92 на цилиндрической части 90 корпуса 12. Противоположный конец 960 элемента 952 ограничителя выполнен с возможностью резьбового зацепления с резьбовым участком 99 цилиндра 90. Проходящая внутрь проксимальная стопорная стенка 962 вращающегося элемента 92 и проходящая внутрь дистальная стопорная стенка 964 служат для ограничения расстояния перемещения TD, на которое может смещаться по оси ограничитель 942 по мере поворота вращающегося элемента 92 на цилиндрической части 90.
На ФИГ. 33 приводится ограничитель 952, который находится примерно на середине расстояния между проксимальной стопорной стенкой 952 и дистальной стопорной стенкой 954. В этом положении поворот вращающегося элемента 92 в первом направлении относительно цилиндрической части 90 будет приводить к осевому перемещению ограничителя в дистальном направлении DD до тех пор, пока ограничитель 952 не войдет в контакт с дистальной стопорной стенкой 964, как показано на ФИГ. 34. Аналогично поворот вращающегося элемента 92 в противоположном направлении относительно цилиндрической части 90 приводит к осевому перемещению ограничителя 952 в проксимальном направлении РD до тех пор, пока он не войдет в контакт с проксимальной стопорной стенкой 962 вращающегося элемента 92. Таким образом, такая конструкция ограничивает число полных оборотов вращающегося элемента 92 вокруг цилиндрической части 90, чтобы исключить случайное повреждение узла 934 спирального проводника. Например, узел 950 ограничителя может позволять врачу поворачивать узел удлиненного ствола и, в частности, вращающийся элемент 92, по меньшей мере, на один полный оборот, но не более чем, например, три полных оборота вокруг цилиндрической части 90 в любом направлении. Однако число оборотов или, более конкретно, масштабы вращательного движения вращающегося элемента 92 на цилиндрической части 90 могут регулироваться посредством изменения величины расстояния движения TD.
На ФИГ. 33 приводится ограничитель 952 в «нейтральном» или «центральном» положении, причем такой ограничитель находится по центру между дистальной стопорной стенкой 954 и проксимальной стопорной стенкой 952. По меньшей мере, в одной форме смещающие элементы 980 могут использоваться для смещения ограничителя 952 в нейтральное положение, если узел 16 удлиненного ствола и вращающийся элемент 92 находятся в соответствующем нейтральном положении. Если врач осуществляет вращательное движение вращающегося участка 92, узел 16 удлиненного ствола будет поворачиваться описанным выше образом. Однако при прекращении вращательного движения вращающегося элемента 92 и узла 16 удлиненного ствола смещающие элементы 980 будут возвращать ограничитель 952 в нейтральное положение.
Например, по меньшей мере, один хирургический инструмент может содержать корпус, который может включать в себя вращающийся элемент, закрепленный на монтажном участке корпуса, для поворота вокруг него на определенный диапазон поворотов. Узел удлиненного ствола, который определяет продольную ось инструмента, может быть функционально связан с вращающимся элементом для вращательного движения вместе с ним вокруг продольной оси инструмента. Хирургический инструмент может дополнительно содержать источник электропитания и включать в себя систему управления проводниками. Система управления проводниками может содержать узел шпули проводника, который может быть установлен на вращающемся элементе и может включать в себя первый конец проводника, который закреплен на монтажном участке корпуса, и второй конец проводника, который закреплен на вращающемся элементе для поворота месте с ним на определенный диапазон поворотов. Система управления проводниками может дополнительно содержать первичный проводник, который может быть закреплен внутри корпуса и выполнен с возможностью передачи электропитания от источника электропитания на узел шпули проводника. Проводник ствола может быть связан с узлом шпули проводника для передачи электропитания на дистальный конец узла удлиненного ствола.
Другой пример хирургического инструмента может содержать корпус, в котором находится вращающийся элемент, закрепленный на монтажном участке корпуса. Хирургический инструмент может дополнительно содержать узел удлиненного ствола, который определяет продольную ось инструмента и может быть функционально связан с вращающимся элементом для вращательного движения вместе с ним вокруг продольной оси инструмента. Хирургический инструмент может дополнительно содержать источник электропитания и средства подачи электропитания от источника электропитания через проводник, который проходит через узел удлиненного ствола. Хирургический инструмент может дополнительно содержать средства ограничения вращательного движения вращающегося элемента вокруг монтажного участка до определенного диапазона вращательного движения, который содержит, по меньшей мере, один полный оборот, но не более трех полных оборотов вокруг монтажного участка.
Как указано в настоящем документе, концевой эффектор может быть установлен на хирургическом инструменте. Как также указано в настоящем документе, хирургический инструмент может содержать пусковой привод, выполненный с возможностью выталкивания скобок из концевого эффектора, включающего в себя кассету со скобками. Как показано в примере осуществления, представленном на ФИГ.94, хирургический инструмент 9000, например, может содержать рукоятку 9010 с корпусом, участком 9012 захвата, пусковым исполнительным механизмом 9014, а также двигатель, размещенный внутри корпуса. Хирургический инструмент 9000 может дополнительно содержать ствол 9040, включающий в себя пусковой стержень 9020, который может подаваться дистально и/или втягиваться проксимально с помощью двигателя. В определенных обстоятельствах концевой эффектор может содержать дистальный участок, который может шарнирно поворачиваться относительно проксимального участка вокруг шарнирного сочленения. В других обстоятельствах концевой эффектор может не содержать шарнирного сочленения. Хирургический инструмент может дополнительно содержать привод шарнирного поворота, выполненный с возможностью шарнирного поворота, по меньшей мере, участка концевого эффектора. Как показано на примере осуществления, представленном на ФИГ. 94, хирургический инструмент 9000, например, может содержать исполнительный механизм 9070 шарнирного поворота, который может быть выполнен с возможностью приведения в движение дистального участка концевого эффектора вокруг шарнирного сочленения. Концевой эффектор, показанный на ФИГ. 94, т. е. концевой эффектор 9060, не является концевым эффектором, выполненным с возможностью шарнирного поворота, однако в конструкции хирургического инструмента 9000 может использоваться концевой эффектор, выполненный с возможностью шарнирного поворота. При использовании концевого эффектора, выполненного без возможности шарнирного поворота, например, такого как концевой эффектор 9060, с хирургическим инструментом 9000 работа исполнительного механизма 9070 шарнирного поворота может не оказывать влияния на работу концевого эффектора 9060.
В дополнение к вышесказанному, концевой эффектор может включать в себя приводные системы, которые соответствуют приводным системам хирургического инструмента. Например, концевой эффектор 9060 может включать в себя пусковой элемент, который может находиться в функциональном взаимодействии с пусковым стволом 9020 хирургического инструмента 9000 в случае установки концевого эффектора 9060 на хирургическом инструменте. Аналогично концевой эффектор может содержать привод шарнирного поворота, который может находиться в функциональном взаимодействии со стволом шарнирного поворота хирургического инструмента в случае установки концевого эффектора на хирургическом инструменте. Более того, например, концевой эффектор 9060 может содержать проксимальный участок 9069 соединения, который может быть связан с дистальным участком 9042 соединения ствола 9040 хирургического инструмента 9000 в случае установки концевого эффектора 9060 на хирургическом инструменте 9000. В различных обстоятельствах перед надлежащим применением концевого эффектора может потребоваться правильная сборка участков соединения, приводной системы и системы шарнирного соединения концевого эффектора и хирургического инструмента.
Как показано на ФИГ. 94, рукоятка 9010 может содержать пусковой крючок 9014, который при приведении в действие пользователем хирургического инструмента 9000 может быть выполнен с возможностью управления двигателем в рукоятке 9010. В различных обстоятельствах рукоятка 9010 может включать в себя контроллер, который может быть выполнен с возможностью обнаружения срабатывания пускового крючка 9014. В некоторых случаях при срабатывании пускового крючка 9014 может происходить замыкание электрической цепи, которая находится в сигнальной связи с контроллером. В таких случаях контроллер может быть выполнен с возможностью управления двигателем для выдвижения пускового ствола 9020 дистально и перемещения бранши 9062 концевого эффектора 9060 к бранше 9064. В некоторых обстоятельствах рукоятка 9010 может включать в себя, по меньшей мере, один датчик, выполненный с возможностью обнаружения силы, прикладываемой к пусковому крючку 9014, и/или угол, на который отклоняется пусковой крючок 9014. Датчик или датчики могут находиться в сигнальной связи с контроллером, причем контроллер может быть выполнен с возможностью регулировки скорости двигателя в зависимости от одного или более сигналов от датчиков. Рукоятка 9010 может содержать предохранитель 9015, который необходимо нажимать перед тем, как контроллер включит двигатель в ответ на входной сигнал от пускового крючка 9014. В различных обстоятельствах предохранитель 9015 может находиться в сигнальной связи с контроллером, причем контроллер может электронным образом блокировать применение двигателя до того момента, пока не будет нажат предохранитель 9015. Рукоятка 9010 может также содержать исполнительный механизм 9074 втягивания, который при срабатывании может заставлять двигатель работать в противоположном направлении, чтобы обеспечить втягивание пускового стержня 9020 и дать возможность отвести браншу 9062 от бранши 9064. В различных обстоятельствах при срабатывании исполнительного механизма 9074 втягивания может происходить замыкание электрической цепи, которая находится в сигнальной связи с контроллером. В некоторых случаях потребуется нажатие предохранителя 9015 перед тем, как контроллер включит двигатель в обратном направлении в ответ на сигнал от исполнительного механизма 9074 втягивания.
До и/или в процессе применения хирургического инструмента 9000 такой хирургический инструмент 9000 и/или определенные системы хирургического инструмента 9000 могут перестать функционировать, функционировать с нарушениями и/или выходить из строя. В определенных обстоятельствах такие нарушения и/или способы их устранения могут быть не очевидны пользователю хирургического инструмента, что может создать серьезные проблемы для пользователя. Более того, такого рода неопределенности могут увеличивать время, необходимое для устранения нарушения или «ошибки». В конструкцию хирургического инструмента 9000 внесены усовершенствования по сравнению с приведенными выше конструкциями. Как показано на ФИГ. 94, контроллер хирургического инструмента 9000 может быть выполнен с возможностью обнаружения ошибки хирургического инструмента 9000 и сообщения о такой ошибке пользователю хирургического инструмента 9000 посредством одного или более индикаторов. Хирургический инструмент 9000 может содержать один или более индикаторов, которые при срабатывании посредством контроллера могут указывать на характер ошибки и/или иным образом привлекать внимание к системе хирургического инструмента 9000, которая тем или иным образом функционирует с нарушениями. Например, хирургический инструмент 9000 может содержать индикатор 9086 концевого эффектора, который, например, может быть выполнен с возможностью обеспечения указания о том, что концевой эффектор не был установлен на стволе 9040 хирургического инструмента 9010. В различных обстоятельствах хирургический инструмент 9000 может содержать датчик, который может быть выполнен с возможностью обнаружения установки концевого эффектора на стволе 9040 и/или, соответственно, обнаружения отсутствия установки концевого эффектора на стволе 9040. Датчик может находиться в сигнальной связи с контроллером так, что контроллер может принимать сигнал от датчика и подтверждать, был ли установлен концевой эффектор на стволе 9040. Если контроллер подтверждает, что концевой эффектор не был установлен на стволе 9040, контроллер может включить индикатор 9086 концевого эффектора. В различных обстоятельствах индикатор 9086 концевого эффектора может содержать световую индикацию, например, такую как красная световая индикация. В некоторых обстоятельствах индикатор 9086 концевого эффектора может содержать светодиод, например, такой как красный светодиод. В дополнение или вместо указанного выше, хирургический инструмент 9000 может содержать датчик, который находится в сигнальной связи с контроллером, который может быть выполнен с возможностью обнаружения того, был ли ранее использован концевой эффектор, установленный на стволе 9040. Например, такой датчик может быть выполнен с возможностью подтверждения того, что, по меньшей мере, некоторые из скобок, находящихся в концевом эффекторе, уже были использованы и/или что элемент установки скобок в концевом эффекторе уже выдвигался. В таких случаях контроллер может включать индикатор 9086 концевого эффектора. Таким образом, включение индикатора 9086 концевого эффектора может передавать пользователю хирургического инструмента 9000 сигнал о наличии определенной ошибки, связанной с концевым эффектором, а также о том, что такую ошибку следует или необходимо устранить перед использованием хирургического инструмента 9000. На примере ФИГ. 94 читателю станет понятно, что индикатор 9086 концевого эффектора расположен смежно с дистальным концом ствола 9040 и что в различных обстоятельствах он может размещаться на дистальном участке 9042 соединения ствола 9040 или рядом с ним. В различных обстоятельствах индикатор 9086 концевого эффектора может размещаться на концевом эффектора 9060. В любом случае, если из-за перечисленного выше включается индикатор 9086 концевого эффектора, пользователь хирургического инструмента 9000 может быстро убедиться в наличии ошибки и в том, что такая ошибка тем или иным образом связана с концевым эффектором. Включение индикатора 9086 концевого эффектора может указывать пользователю на незавершенность установки концевого эффектора на стволе 9040 и/или на необходимость замены концевого эффектора.
В дополнение или вместо индикатора 9086 концевого эффектора хирургический инструмента может содержать один или более индикаторов. Например, хирургический инструмент 9000 может содержать индикатор 9081 пускового крючка. Индикатор 9081 пускового крючка может находиться в сигнальной связи с контроллером хирургического инструмента 9000 так, что при обнаружении контроллером ошибки, связанной, например, с пусковым приводом хирургического инструмента 9000, контроллер может включать индикатор 9081 пускового крючка. Как показано на ФИГ. 94, индикатор 9081 пускового крючка может размещаться смежно с пусковым крючком 9014. В таких обстоятельствах пользователь хирургического инструмента 9000, увидев срабатывание индикатора 9081 пускового крючка, может сделать вывод о том, что возникшая ошибка связана с пусковым приводом, и может приступить к выявлению источника ошибки. В некоторых обстоятельствах контроллер может включать индикатор 9081 пускового крючка, например, при нарушении работы аккумулятора хирургического инструмента 9000 по той или иной причине. Например, если напряжение аккумулятора находится ниже желательного уровня, такой аккумулятор не сможет управлять двигателем нужным образом, и индикатор 9081 пускового крючка может указывать, например, на необходимость замены аккумулятора. В различных обстоятельствах в настоящее время контроллер может блокировать работу одной или более действующих систем хирургического инструмента 9000, если контроллер включает индикатор, например, такой как индикатор 9086 концевого эффектора и/или индикатор 9081 пускового крючка. Например, контроллер может быть выполнен с возможностью функционального разобщения пускового крючка 9014 от двигателя так, что срабатывание пускового крючка 9014 не приводит в работе двигателя, если, например, при этом загораются индикатор 9086 концевого эффектора и/или индикатор 9081 пускового крючка. Такое функциональное разобщение пускового крючка 9014 от двигателя может также указывать пользователю хирургического инструмента 9000 на возникшую ошибку в работе хирургического инструмента, а также сигнализировать о том, что пользователь должен проверить индикаторы хирургического инструмента 9000, чтобы выяснить характер такой ошибки.
Как показано на примере осуществления, представленном на ФИГ. 94, хирургический инструмент 9000 может содержать индикатор 9085 исполнительного механизма втягивания, размещенный смежно с исполнительным механизмом 9074 втягивания. Аналогично описанному выше индикатор 9085 исполнительного механизма втягивания может находиться в сигнальной связи с контроллером, причем при обнаружении контроллером ошибки, связанной, например, с приводом втягивания, контроллер может включать индикатор 9085 исполнительного механизма втягивания. В различных обстоятельствах контроллер может включать индикатор 9085 исполнительного механизма втягивания в случае, если не был нажат предохранитель 9015 до приведения в действие исполнительного механизма 9074 втягивания. В таких обстоятельствах индикатор 9085 исполнительного механизма втягивания может служить напоминанием о необходимости нажатия предохранителя 9015. В определенных обстоятельствах хирургический инструмент 9000 может содержать индикатор 9082 предохранителя, размещенный смежно с предохранителем 9015. В некоторых обстоятельствах контроллер хирургического инструмента 9000 может включать индикатор 9082 предохранителя, если пользователь приводит в действие исполнительный механизма 9074 втягивания до приведения в действие предохранителя 9015. Индикатор 9082 предохранителя может находиться в сигнальной связи с контроллером, причем при обнаружении контроллером, что, например, пусковую систему невозможно переключать между пусковым режимом и режимом втягивания, контроллер может включать индикатор 9082 предохранителя. Хирургический инструмент 9000 может содержать индикатор 9084 исполнительного механизма шарнирного поворота, размещенный смежно с исполнительным механизмом 9070 шарнирного поворота. Аналогично описанному выше индикатор 9084 исполнительного механизма шарнирного поворота может находиться в сигнальной связи с контроллером, причем при обнаружении контроллером ошибки, связанной, например, с приводом шарнирного поворота, контроллер может включать индикатор 9084 исполнительного механизма шарнирного поворота. Хирургический инструмент 9000 может содержать индикатор 9083 ствола, размещенный смежно с соединением ствола, выполненного с возможностью установки стола 9040 на рукоятке 9010. Аналогично описанному выше индикатор 9083 ствола может находиться в сигнальной связи с контроллером, причем при обнаружении контроллером ошибки, связанной, например, со стволом 9040, контроллер может включать индикатор 9083 стержня.
Как показано на ФИГ. 95, хирургический инструмент 9100 может включать в себя рукоятку 9110 с набором индикаторов 9190, выполненных с возможностью и обеспечивающих пользователя хирургического инструмента 9100 индикацией наличия одной или более ошибок, связанных с хирургическим инструментом 9100 и/или соединенным с ним концевым эффектором. Набор индикаторов 9190 может быть расположен любым удобным образом. В различных обстоятельствах набор индикаторов 9190 может быть размещен с воспроизведением формы или примерной формы, например, хирургического инструмента 9100 и/или соединенного с ним концевого эффектора. По меньшей мере, в одном случае наружная поверхность рукоятки 9110 может, например, содержать изображение хирургического инструмента 9100 и/или соединенного с хирургическим инструментом концевого эффектора. Набор индикаторов 9190 может быть размещен в соответствии с общими очертаниями хирургического инструмента и концевого эффектора таким образом, чтобы, например, указывать на тот участок хирургического инструмента 9100 и/или концевого эффектора, где возникает ошибка, была зарегистрирована ошибка и/или там, где необходима проверка для устранения ошибки. Например, общие очертания могут разграничиваться таким образом, чтобы отображать концевой эффектор 9060, ствол 9040, рукоятку 9010, пусковой крючок 9014, предохранитель 9015, возвратный исполнительный механизм 9074 и/или исполнительный механизм 9070 шарнирного поворота. Например, в различных обстоятельствах индикатор 9192 концевого эффектора может размещаться смежно с изображением концевого эффектора 9060, индикатор 9193 ствола может размещаться смежно с изображением ствола 9040, индикатор 9191 пускового крючка может размещаться смежно с изображением пускового крючка 9014, индикатор 9195 предохранителя может размещаться смежно с изображением предохранителя 9015, индикатор 9196 возвратного исполнительного механизма может размещаться смежно с изображением возвратного исполнительного механизма 9074, и/или индикатор 9194 исполнительного механизма шарнирного поворота может размещаться смежно с изображением исполнительного механизма 9070 шарнирного поворота. В различных обстоятельствах каждый из индикаторов 9191, 9192, 9193, 9194, 9195 и/или 9196 может содержать светодиод. В некоторых обстоятельствах каждый светодиод может содержать красный светодиод, который может включаться контроллером для индикации наличия ошибки. В различных обстоятельствах контроллер может быть выполнен с возможностью включения импульсной индикации светодиода, что может сократить время, необходимое для того, чтобы пользователь заметил срабатывание индикатора. В определенных обстоятельствах каждый индикатор может включать в себя светодиод, который может испускать свет более одного цвета. В некоторых обстоятельствах каждый такой светодиод может быть выполнен с возможностью селективного испускания, например, свет красного цвета и свет зеленого цвета. Контроллер может быть выполнен с возможностью включения светодиода зеленого цвета, если не было обнаружено никаких ошибок в соответствующем участке хирургического инструмента 9100 и/или установленного на нем концевого эффектора, или альтернативно красного цвета, если обнаружена ошибка в соответствующем участке хирургического инструмента 9100 и/или установленного на нем концевого эффектора.
В некоторых обстоятельствах, как более подробно описано ниже, контроллер хирургического инструмента 9000 может блокировать один или более исполнительных механизмов хирургического инструмента, например, таких как пусковой крючок 9014, исполнительный механизм 9074 втягивания и/или исполнительный механизм 9070 шарнирного поворота, если контроллер включает тот или иной индикатор, связанный с таким исполнительным механизмом. Например, контроллер может блокировать пусковой крючок 9014, если он включает индикатор 9081 пускового крючка, исполнительный механизм 9074 втягивания, если он включает индикатор 9085 исполнительного механизма втягивания, и/или исполнительный механизм 9070 шарнирного поворота, если он включает индикатор 9084 исполнительного механизма шарнирного поворота. Рукоятка 9010 хирургического инструмента 9000, например, может содержать предохранитель пускового крючка, который может быть выполнен с возможностью селективной «блокировки» пускового крючка 9014 и предотвращения срабатывания пускового крючка 9014. Предохранитель пускового крючка может препятствовать достаточному срабатыванию пускового крючка 9014 для приведения в движение двигателя хирургического инструмента. По меньшей мере, в одних обстоятельствах можно не позволять пусковому крючку 9014 замыкать выключатель пускового крючка. В определенных обстоятельствах контроллер хирургического инструмента 9000 может быть выполнен с возможностью электронной блокировки пускового крючка 9014, т. е. в дополнение к срабатыванию предохранителя пускового крючка прекращается подача электропитания аккумулятора на двигатель. В таких обстоятельствах электронная блокировка и механическая блокировка могут дублировать друг друга; однако механическая блокировка может передавать пользователю хирургического инструмента 9000 сигнал обратной связи о функциональном отключении пускового привода. Как указано выше, контроллер хирургического инструмента 9000 может также обеспечивать обратную связь, например, посредством индикатора 9081 пускового крючка. Таким образом, пользователю хирургического инструмента 9000 может передаваться сигнал тактильной обратной связи и/или визуальной обратной связи о возникновении ошибки. В некоторых обстоятельствах сигнал тактильной обратной связи может заставить пользователя хирургического инструмента 9000 начать искать сигнал визуальной обратной связи. Например, пользователь может попытаться привести в действие пусковой крючок 9014, и если пользователь не сможет привести в действие пусковой крючок 9014, он затем может провести осмотр инструмента на предмет сработавших индикаторов. В любом случае после устранения ошибки контроллер может разблокировать пусковой крючок 9014, выключив предохранитель пускового крючка.
Как показано на ФИГ. 100, хирургический инструмент 9000 может включать в себя предохранитель 9390 пускового крючка, который может быть выполнен с возможностью блокировки пускового крючка 9014. Предохранитель 9390 пускового крючка может переключаться между заблокированным состоянием, которое показано на ФИГ. 100, 101 и 103, и незаблокированным состоянием, показанным на ФИГ. 102. Если концевой эффектор не установлен на стволе 9040 хирургического инструмента 9000, предохранитель 9390 пускового крючка может быть смещен в сторону его заблокированного состояния. В таком заблокированном состоянии предохранитель 9330 пускового крючка может препятствовать или, по меньшей мере, по существу препятствовать срабатыванию пускового крючка 9014. В частности, предохранитель 9390 пускового крючка может включать в себя зубчатую рейку 9391 ствола, зубчатое колесо 9392 и зубчатую рейку 9393 рукоятки, а также смещающий элемент, например, такой как пружина, который может быть выполнен с возможностью смещения зубчатой рейки 9391 ствола в проксимальное положение, а зубчатой рейки 9393 рукоятки - в нижнее положение. Проксимальное положение зубчатой рейки 9391 ствола и нижнее положение зубчатой рейки 9393 рукоятки показаны на ФИГ. 101. Как показано преимущественно на ФИГ. 101, зубчатая рейка 9393 рукоятки может включать в себя отверстия 9396, и пусковой крючок 9014 может включать в себя выступы 9395, которые при расположении зубчатой рейки рукоятки в ее нижнем положении не совмещены с отверстиями 9396. В частности, пусковой крючок 9014 может содержать тумблер с осью 9397 шарнира, при этом при расположении зубчатой рейки 9393 рукоятки в ее нижнем положении поворот пускового крючка 9014 будет заставлять, по меньшей мере, один из выступов 9395, проходящих из пускового крючка 9014, упираться в зубчатую рейку 9393 рукоятки и препятствовать полному срабатыванию пускового крючка 9014.
Если концевой эффектор установлен на стволе 9040, то, в дополнение к вышесказанному, предохранитель 9390 пускового крючка может перемещаться между его заблокированной конфигураций и его незаблокированной конфигурацией. В незаблокированной конфигурации предохранителя 9390 пускового крючка, как показано преимущественно на ФИГ. 102, зубчатая рейка 9393 рукоятки может находиться в ее верхнем положении. При верхнем положении зубчатой рейки 9393 рукоятки отверстия 9396 в зубчатой рейке 9393 рукоятки совмещаются с выступами 9395, проходящими из пускового крючка 9014. В таких обстоятельствах пусковой крючок 9014 может переключаться для срабатывания пускового крючка 9014. В частности, выступы 9395 могут проходить через отверстия 9396, обеспечивая возможность переключения пускового крючка 9014 вокруг оси 9397 шарнира. Таким образом, в свете указанного выше, перемещение зубчатой рейки 9393 рукоятки между ее нижним и верхним положениями соответственно блокирует и разблокирует пусковой крючок 9014. Для перемещения зубчатой рейки 9393 рукоятки между ее нижним положением и ее верхним положением могут использоваться различные механизмы. По меньшей мере, в одном таком варианте осуществления, как показано на ФИГ. 100, ствол 9040 может включать в себя исполнительный механизм 9399 блокировки пуска, который может смещаться проксимально под действием концевого эффектора, если концевой эффектор установлен на стволе 9040. Зубчатая рейка 9391 ствола может устанавливаться и/или проходить проксимально от исполнительного механизма 9399 блокировки пуска и может содержать образованные на ее поверхности зубцы 9391а. Зубцы 9391а могут входить в зубчатое зацепление с зубцами 9392а на зубчатом колесе 9392 так, что при проксимальном перемещении исполнительного механизма 9399 блокировки пуска и зубчатой рейки 9391 ствола зубчатое колесо 9392 может поворачиваться вокруг своей оси. Соответственно, зубчатая рейка 9393 рукоятки может содержать образованные на ее поверхности зубцы 9393а рейки, которые также входят в зубчатое зацепление с зубцами 9392а зубчатого колеса, и, таким образом, при проксимальном перемещении зубчатой рейки 9391 ствола зубчатая рейка 9393 рукоятки может перемещаться из ее нижнего положения в ее верхнее положение, таким образом снимая блокировку пускового крючка 9014. Для возврата зубчатой рейки 9393 рукоятки в ее нижнее положение зубчатую рейку 9391 ствола можно переместить дистально для поворота зубчатого колеса 9392 в противоположном направлении. В различных обстоятельствах зубчатая рейка 9391 ствола может перемещаться дистально в результате снятия концевого эффектора со ствола 9040.
Как показано на ФИГ. 96-97, рукоятка 9010, например, может включать в себя предохранитель 9290 спускового механизма. Предохранитель 9290 спускового механизма может содержать корпус 9291, стопорный штифт 9292, выполненный с возможностью развертывания, фиксатор 9293 и смещающий элемент 9294, выполненный с возможностью перемещения стопорного штифта 9294 между неразвернутым положением, показанным на ФИГ. 96 и 98, и развернутым положением, показанным на ФИГ. 97 и 99. В различных вариантах фиксатор 9293 может быть образован из термочувствительного материала, поддающегося воздействию тепла. По меньшей мере, в одном таком случае термочувствительный материал может быть выполнен с возможностью перехода между твердым материалом и текучей средой, такой как, например, жидкость, суспензия и/или газ, и/или, например, между твердым материалом и полутвердым материалом. При переходе или, по меньшей мере, частичном переходе термочувствительного материала между твердым состоянием и текучим состоянием фиксатор 9293 может высвобождать стопорный штифт 9294 для блокировки пускового крючка и/или любого другого подходящего спускового механизма рукоятки 9010. В различных вариантах при развертывании стопорный штифт 9294 может плавно заходить за пусковой крючок и/или иначе взаимодействовать с ним. Рукоятка может включать в себя любое подходящее число предохранителей 9290 спускового механизма или т. п. для выборочной блокировки любого подходящего числа спусковых механизмов и/или, например, кнопок. Читателю станет понятно, предохранитель 9290 спускового механизма может быть выполнен без возможности сбрасывания. В таких вариантах приведенный в действие предохранитель 9290 спускового механизма может постоянно блокировать, например, пусковой крючок рукоятки так, что применение инструмента становится невозможным. Постоянная блокировка пускового крючка и/или любого другого спускового механизма инструмента может означать, что применение инструмента абсолютно невозможно, хотя в других обстоятельствах постоянную блокировку нельзя сбросить сразу, и может потребоваться передача инструмента, например, квалифицированному техническому специалисту или в специальное учреждение, где смогут оценить, подлежит ли инструмент восстановлению и последующему применению или инструмент следует утилизировать. При, по меньшей мере, частичном преобразовании термочувствительного материала фиксатора 9293 в жидкость технический специалист может предположить, что инструмент подвергался воздействию температуры, превышающей температуру перехода термочувствительного материала. В различных вариантах температурой перехода термочувствительного материала может представлять собой температуру, при которой твердый материал, например, превращается в жидкость, испаряется и/или сублимируется. В любом случае термочувствительный материал и, таким образом, температуру перехода фиксатора 9293 можно выбрать так, что высвобождение стопорного штифта 9294 может указывать на то, что хирургический инструмент подвергся воздействию температуры, превышающей определенную пороговую температуру. В различных случаях хирургический инструмент может быть поврежден вследствие воздействия избыточной температуры. Например, хирургический инструмент может включать в себя твердые электронные компоненты, которые могут быть повреждены в результате воздействия такой избыточной температуры. В таких случаях пороговая температура инструмента и температура перехода фиксатора 9293 могут быть равны или, по меньшей мере, по существу равны, причем, в результате, можно предположить, что инструмент не подвергался воздействию температуры, превышающей пороговую температуру, если предохранитель 9290 спускового механизма не был приведен в действие, и, соответственно, что инструмент подвергался воздействию температуры, превышающей пороговую температуру, если предохранитель 9290 спускового механизма был приведен в действие, и, таким образом, хирургический инструмент мог быть поврежден, или, по меньшей мере, его необходимо проверить на отсутствие повреждений.
В дополнение к вышесказанному, при стерилизации хирургического инструмента он может подергаться воздействию температур, превышающих пороговую температуру и/или температуру перехода. Известно множество процедур стерилизации, некоторые из них включают этап нагрева хирургического инструмента. В дополнение или вместо предохранителя 3290 спускового механизма хирургический инструмент может включать в себя, по меньшей мере, один температурный датчик, способный оценить температуру, воздействию которой подвергается хирургический инструмент. В различных случаях температурный датчик или датчики могут обмениваться сигналами с контроллером хирургического инструмента, который может быть выполнен с возможностью оценки факта воздействия на хирургический инструмент температуры, превышающей пороговую температуру. По меньшей мере, в одном таком случае контроллер может включать в себя микропроцессор и алгоритм, позволяющие оценить сигналы, полученные от температурного датчика или датчиков. Если контроллер установит, что пороговая температура достигнута и/или превышена, контроллер может постоянно препятствовать работе инструмента. Иными словами, контроллер может обеспечивать электронную блокировку хирургического инструмента. Аналогично вышесказанному постоянная блокировка инструмента может означать, что применение инструмента абсолютно невозможно, хотя в других случаях постоянную блокировку нельзя сбросить сразу, при этом может потребоваться передача инструмента, например, квалифицированному техническому специалисту или в специальное учреждение, где смогут оценить, подлежит ли инструмент восстановлению и последующему применению или инструмент следует утилизировать. Читателю станет понятно, что при стерилизации хирургического инструмента для работы контроллера и/или датчиков хирургического инструмента необходим источник электропитания. Несколько вариантов осуществления хирургических инструментов включают в себя съемный аккумулятор или источник электропитания, которые можно снять перед стерилизацией хирургического инструмента, при этом в таких случаях для съемного аккумулятора стерилизацию и/или обработку проводят отдельно. После снятия съемного источника электропитания с этих описанных выше инструментов, как станет понятно читателю, контроллер и/или датчики могут не получать достаточной энергии для отслеживания температуры хирургического инструмента. Варианты осуществления хирургически инструментов, описанные в настоящем документе, могут включать в себя аккумулятор или источник электропитания, которые не снимаются с хирургического инструмента при его обработке. Такой аккумулятор может быть известен как постоянный аккумулятор, так как он может питать контроллер и/или датчики температуры в процессе стерилизации инструмента. В различных вариантах инструмент, включающий в себя постоянный аккумулятор, может также включать в себя съемный и/или перезаряжаемый аккумулятор. В любом случае инструмент может обладать достаточной мощностью для обнаружения и регистрации температуры, воздействию которой он подвергается. По меньшей мере, в одном случае контроллер инструмента может включать в себя микросхему памяти, выполненную с возможностью хранения показаний температуры, например, в регистре температуры. В различных обстоятельствах контроллер может регистрировать показания датчиков периодически, т. е. с определенной частотой выборки. В некоторых случаях контроллер может быть выполнен так, что при регистрации показаний температуры, превышающей определенную температуру, хотя и ниже пороговой температуры, контроллер может увеличивать частоту выборки. В некоторых случаях контроллер может быть выполнен так, что при последовательной регистрации показаний температуры, которая ниже определенной температуры, контроллер может уменьшать частоту выборки, например, обратно до исходной частоты выборки.
На ФИГ. 99A показан алгоритм для контроллера. В некоторых случаях этот алгоритм может содержать процедуру пуска хирургического инструмента, например, при первом применении хирургического инструмента после стерилизации. Процедура пуска может начинаться после включения инструмента. Инструмент может включаться автоматически после установки концевого эффектора на инструмент. По меньшей мере, в одном случае при установке концевого эффектора на хирургический инструмент происходит замыкание переключателя, обменивающегося сигналами с контроллером. В дополнение или вместо указанного выше, включение инструмента может происходить, например, после нажатия кнопки и/или переключателя на рукоятке. В любом случае контроллер может затем оценить показания температуры, хранящиеся на описанной выше микросхеме памяти. Например, контроллер может оценить, равны ли какие-либо из хранящихся показаний температуры пороговой температуре или превышают ее. Если контроллер определит, что все хранящиеся показания температуры ниже пороговой температуры, контроллер может продолжать нормальное выполнение процедуры пуска. Если контроллер определит, что одно или более хранящихся показаний температуры равны или превышают пороговую температуру, контроллер может продолжать выполнять альтернативную процедуру. По меньшей мере, в одном примере контроллер может полностью отключать инструмент, например, путем электронной блокировки и/или механической блокировки, как описано в настоящем документе. В некоторых других случаях контроллер может разрешить применение инструмента, даже если контроллер определил, что одно или более хранящихся показаний температуры равны или превышают пороговую температуру. Контроллер может сохранить это определение в своей памяти и/или сообщить пользователю о превышении пороговой температуры посредством экрана, например, при помощи светодиода, а затем продолжить выполнение своей нормальной процедуры пуска. В различных случаях контроллер может рассматривать пороговую температуру как абсолютный максимум, т. е. одного показания температуры, равного или превышающего пороговую температуру, достаточно для запуска альтернативной программы пуска или полной блокировки инструмента. В других случаях контроллер может быть выполнен с возможностью оценки того, является ли термограмма, в которой показания температуры равны или превышают пороговую температуру, достаточной для запуска альтернативной программы пуска или полной блокировки инструмента, поскольку как время, так и температура могут быть факторами, которые необходимо учитывать при оценке вероятности повреждения инструмента, например, во время стерилизации.
Как показано на ФИГ. 104-109, хирургический инструмент, например, такой как хирургический инструмент 9000, может включать в себя рукоятку 9410, включая систему 9490 предохранителя пускового крючка. Рукоятка 9410 может быть аналогична рукоятке 9110 во многих аспектах, и для краткости изложения эти аспекты не будут повторяться в настоящем документе. Аналогично вышесказанному система 9490 предохранителя пускового крючка может быть выполнена с возможностью блокировки и высвобождения пускового крючка 9414. Также аналогично вышесказанному система 9490 предохранителя пускового крючка может быть переведена в заблокированное состояние, когда концевой эффектор не установлен на стволе 9040 хирургического инструмента, как показано на ФИГ. 104-107, и может быть переведена в незаблокированное состояние, когда концевой эффектор полностью установлен на стволе 9040, как показано на ФИГ. 108 и 109. При установке концевого эффектора на ствол 9040, в дополнение к вышесказанному и как показано преимущественно на ФИГ. 108 и 109, концевой эффектор может толкать чувствительный элемент 9499 проксимально. Чувствительный элемент 9499 может проходить через ствол 9040 от дистального конца ствола 9040 к его проксимальному концу. В процессе применения концевой эффектор может упираться в дистальный конец чувствительного элемента 9499 при установке концевого эффектора на ствол 9040 и толкать чувствительный элемент 9499 проксимально, как указано выше. При проталкивании чувствительного элемента 9499 проксимально, как показано на ФИГ. 108 и 109, чувствительный элемент 9499 может контактировать с качающимся рычагом 9486 системы 9490 предохранителя пускового крючка и поворачивать качающийся рычаг 9486 вверх. Качающийся рычаг 9486 может содержать конец, выполненный с возможностью поворота и закрепленный на корпусе рукоятки посредством штифта 9487, выполненного таким образом, чтобы позволять качающемуся рычагу 9486 поворачиваться вокруг оси. Качающийся рычаг 9486 может дополнительно содержать участок 9488 следящего элемента кулачка, с которым может контактировать чувствительный элемент 9499. В процессе применения чувствительный элемент 9499 может перемещать качающийся рычаг 9486 между нижним положением и верхним положением, чтобы перемещать систему 9490 предохранителя пускового крючка между заблокированным положением и незаблокированным положением соответственно. Система 9490 предохранителя пускового крючка может дополнительно включать в себя прикрепленный к качающемуся рычагу 9486 стопорный штифт 9485, который может подниматься вверх при повороте качающегося рычага 9486 вверх и опускаться вниз при повороте качающегося рычага 9486 вниз соответственно. Стопорный штифт 9485 может содержать верхний конец, установленный с возможностью поворота на качающемся рычаге 9486, и нижний конец, который проходит через отверстие 9483, сформированное в пусковом крючке 9481, когда стопорный штифт 9485 находится в нижнем положении. В различных обстоятельствах отверстие 9483 может быть сформировано в рычаге 9482, проходящем от пускового крючка 9414. При размещении стопорного штифта 9485 в отверстии 9483 пусковой крючок 9414 не может вращаться вокруг его точки 9484 опоры, и, следовательно, пользователь не может привести пусковой крючок 9414 в действие. Когда стопорный штифт 9485 находится в верхнем положении, стопорный штифт 9485 не может располагаться в отверстии 9483, и, следовательно, пользователь может привести пусковой крючок 9414 в действие. Когда концевой эффектор отсоединен от ствола 9040, чувствительный элемент 9499 может быть перемещен из проксимального положения в его дистальное положение. Иными словами, если концевой эффектор не прикреплен к стволу 9040, смещающий элемент, например, такой как пружина 9489, может смещать качающийся рычаг 9486 вниз и, соответственно, смещать систему 9490 предохранителя пускового крючка в заблокированное состояние. Кроме того, пружина 9489 может прилагать смещающее усилие к чувствительному элементу 9499 посредством рычага 9482 и толкать чувствительный элемент 9499 дистально, когда концевой эффектор не установлен на ствол 9040.
В дополнение к вышесказанному, работа чувствительного элемента 9499 и системы 9490 предохранителя пускового крючка может служить средством взаимодействия с пользователем хирургического инструмента. Например, когда концевой эффектор не установлен на стволе 9040, чувствительный элемент 9499 смещен дистально, а пусковой крючок 9414 будет заблокирован, причем при попытке пользователя привести пусковой крючок 9414 в действие пользователь быстро поймет, что пусковая система хирургического инструмента функционирует некорректно. В этом примере пользователь быстро поймет, что для применения хирургического инструмента необходимо установить концевой эффектор на ствол 9040. В различных обстоятельствах пусковой крючок может быть заблокирован, если концевой эффектор уже использовался, даже если он присоединен к стволу 9040. По меньшей мере, в одних таких обстоятельствах концевой эффектор может включать в себя пусковой элемент, который при расположении в своем самом проксимальном положении может толкать чувствительный элемент проксимально при установке концевого эффектора на ствол 9040; однако, если такой пусковой элемент уже, по меньшей мере, частично выдвинут, при установке концевого эффектора на ствол 9040 чувствительный элемент может не проталкиваться проксимально, и, следовательно, пусковой крючок может оставаться заблокированным. И в этом случае такой предохранитель пускового крючка может указывать пользователю на то, что существуют проблемы с пусковым приводом, а именно на то, что в данных обстоятельствах концевой эффектор уже использовался. При отсутствии такой тактильной блокировки пользователь столкнется с обстоятельствами, при которых он сможет нажать на исполнительный механизм, а хирургический инструмент не ответит на нажатие исполнительного механизма, что может привести пользователя в замешательство.
Как описано выше, при установке ранее не использованного концевого эффектора на ствол 9040 чувствительный элемент может продвигаться проксимально, высвобождая пусковой крючок. В различных обстоятельствах чувствительный элемент и система предохранителя пускового крючка могут быть выполнены так, что пусковой крючок не может быть разблокирован до тех пор, пока концевой эффектор не будет полностью установлен на стволе 9040. Если концевой эффектор установлен на стволе 9040 только частично, не происходит достаточного смещения чувствительного элемента, необходимого для высвобождения пускового крючка. И в этом случае такая блокировка пускового крючка может указывать пользователю на то, что существуют проблемы с пусковым приводом, а именно на то, в данных обстоятельствах что концевой эффектор полностью не установлен на стволе 9040.
Как описано выше, концевой эффектор может быть установлен на хирургическом инструменте, который может включать в себя контроллер, выполненный с возможностью идентификации концевого эффектора. В некоторых случаях контроллер может быть выполнен с возможностью выполнения оценки идентичности концевого эффектора при активации контроллера. В некоторых случаях, как показано на ФИГ. 176, контроллер может быть активирован при вставке аккумулятора в рукоятку. В дополнение или вместо указанного выше, контроллер может быть выполнен с возможностью выполнения оценки состояния хирургического инструмента при активации контроллера. Например, контроллер может быть выполнен с возможностью выполнения оценки положения закрывающего элемента замыкающей системы, положения пускового элемента приводной системы и/или положения шарнирного элемента системы шарнирного соединения. В некоторых случаях хирургический инструмент может включать в себя датчик абсолютного позиционирования для обнаружения положения пускового элемента. Такой датчик описан в заявке на патент США № 13/803,097, озаглавленной «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА И СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД», поданной 14 марта 2013 г., которая полностью включена в настоящий документ путем ссылки. В некоторых случаях хирургический инструмент может включать в себя регистратор конца хода. Такой регистратор конца хода может содержать механический переключатель, счетчик и/или реле и/или электронный переключатель, счетчик и/или реле, включая данные, хранящиеся в энергозависимой памяти. В таком варианте осуществления контроллер может оценивать, был ли завершен предыдущий пусковой ход. Такие варианты осуществления могут быть полезны во множестве ситуаций. Например, контроллер может быть случайно отключен и/или электропитание может быть прервано во время хирургического вмешательства, и при повторной активации контроллер может оказаться не способен оценить, запущен ли инструмент в первый раз или инструмент находится на середине предыдущего пускового хода. Регистратор конца хода помогает контроллеру различать два этих события. Кроме того, регистратор конца хода, который не отключается или не перезагружается в случае потери или прерывания электропитания инструмента, позволяет контроллеру оценивать, прекратилось ли питание хирургического инструмента во время пускового хода. Если контроллер определяет, что предыдущий пусковой ход не был завершен, контроллер может быть выполнен с возможностью, во-первых, разрешения подачи электропитания на двигатель для завершения пускового хода и/или, во-вторых, разрешения подачи электропитания на двигатель для втягивания пускового элемента, закрывающего элемента и/или шарнирного элемента в их исходные или неактивированные положения. В различных случаях контроллер может предложить пользователю хирургического инструмента вариант продолжения пускового хода или возврата механических систем и/или электрических систем инструмента в исходные или неактивированные положения. В таких вариантах осуществления хирургический инструмент не может автоматически возвращать эти системы в исходные или неактивированные положения. В любом случае после возвращения хирургического инструмента в исходное или неактивированное состояние ранее активированный концевой эффектор может быть снят с хирургического инструмента, и/или неактивированный концевой эффектор может быть установлен на хирургический инструмент. В различных случаях, как указано в настоящем документе, хирургический инструмент затем может идентифицировать или, по меньшей мере, предпринять попытку идентификации неактивированного концевого эффектора.
Как показано на ФИГ. 177, контроллер хирургического инструмента может выполнять диагностическую проверку инструмента и/или аккумулятора. Например, после активации контроллера хирургический инструмент может оценить, подвергался ли хирургический инструмент воздействию температуры, превышающей пороговую температуру хирургического инструмента, как описано в настоящем документе. Таким образом, например, хирургический инструмент может оценивать имеющееся электропитание, напряжение и/или ток аккумулятора, как описано в настоящем документе. Если инструмент не проходит одну или более из этих диагностических проверок, контроллер может не подавать электропитание на двигатель, физически блокируя инструмент, и/или указывать пользователю на отрицательный результат проверки. В таких обстоятельствах инструмент может регистрировать такие отрицательные результаты в памяти так, что данные проверок могут помочь техническому специалисту в последующей оценке инструмента. Допуская, что инструмент проходит эти диагностические проверки, инструмент, аналогично вышесказанному, может регистрировать данные проверок, связанные с прохождением диагностических проверок. В любом случае инструмент затем может продолжить оценку того, находится ли инструмент в исходном или неактивированном состоянии, и идентификацию концевого эффектора. Как указано в настоящем документе, в нем представлено описание процедуры идентификации концевого эффектора. Кроме того, в настоящем документе описана оценка того, какой концевой эффектор присоединен к хирургическому инструменту - «умный» концевой эффектор или «немой» концевой эффектор. В различных случаях «умный» концевой эффектор может представлять собой концевой эффектор, который может передавать параметры и/или, по меньшей мере, часть операционной программы хирургическому инструменту в рамках процесса идентификации. «Умный» концевой эффектор может представлять собой концевой эффектор, который тем или иным образом идентифицирует способ использования концевого эффектора хирургическим инструментом. В некоторых случаях «немой» концевой эффектор - это концевой эффектор, который ни коим образом не идентифицирует способ использования концевого эффектора хирургическим инструментом. Пример рабочей процедуры в соответствии с указанным выше представлен на ФИГ. 178.
Как описано в настоящем документе, для питания хирургического инструмента может применяться аккумулятор. В различных случаях хирургический инструмент и/или аккумулятор могут быть выполнены с возможностью оценки способности аккумулятора обеспечивать хирургический инструмент достаточной мощностью для выполнения одной или более функций. В некоторых случаях хирургический инструмент и/или аккумулятор могут быть выполнены с возможностью указания пользователю хирургического инструмента на то, что аккумулятор обладает достаточной мощностью для выполнения одной или более функций. На ФИГ. 179 представлена цепь, выполненная с возможностью указания напряжения аккумулятора. Такая цепь может присутствовать в хирургическом инструменте и/или аккумуляторе. В любом случае цепь может включать в себя множество индикаторов, которые могут указывать уровень заряда, напряжение и/или мощность, обеспечиваемую аккумулятором. Например, цепь может включать в себя три индикатора, включая первый индикатор, выполненный с возможностью указания на то, что аккумулятор имеет, по меньшей мере, первое напряжение, второй индикатор, выполненный с возможностью указания на то, что аккумулятор имеет, по меньшей мере, второе напряжение, и третий индикатор, выполненный с возможностью указания на то, что аккумулятор имеет, по меньшей мере, третье напряжение. Как показано на ФИГ. 179, цепь 12100 может включать в себя первую цепь 12110 индикатора, вторую цепь 12120 индикатора и третью цепь 12130 индикатора, которые расположены параллельно друг другу. При замыкании переключателя 12101 потенциал аккумулятора может быть приложен к цепям 12110, 12120 и 12130 индикаторов. Первая цепь 12110 индикатора может включать в себя зенеровский диод 12111, светодиод 12112 и резистор R1 12113. Аналогично вторая цепь 12120 индикатора может включать в себя зенеровский диод 12121, светодиод 12122 и резистор R2 12123, а третья цепь 12130 индикатора может включать в себя зенеровский диод 12131, светодиод 12132 и резистор R3 12133. Каждый из зенеровских диодов 12111, 12121 и 12131 может иметь отличное от других разрывное напряжение. Например, первый зенеровский диод 12111 может иметь разрывное напряжение 11,5 В, например, второй зенеровский диод 12121 может иметь разрывное напряжение 10 В, и, например, третий зенеровский диод 12131 может иметь разрывное напряжение 8 В. В таком варианте осуществления при напряжении аккумулятора 11,5 В или более загораются светодиоды 12112, 12122 и 12132. Включение всех светодиодов может указывать пользователю хирургического инструмента на то, что аккумулятор полностью заряжен и/или, по меньшей мере, имеет достаточный заряд для выполнения любой функции, требуемой хирургическим инструментом. При напряжении аккумулятора 10 В или более, но менее 11,5 В, загораются светодиоды 12112 и 12122, однако не загорается светодиод 12132. Включение светодиодов 12112 и 12122, но не светодиода 12132, может указывать пользователю хирургического инструмента на то, что аккумулятор заряжен не полностью, но, по меньшей мере, имеет достаточный заряд для выполнения любой функции, требуемой хирургическим инструментом. При напряжении аккумулятора 8 В или более, но менее 10 В, загорается светодиод 12112, однако не загораются светодиоды 12122 и 12132. Включение светодиода 12112, но не светодиодов 12122 и 12132, может указывать пользователю хирургического инструмента на то, что заряд аккумулятора заканчивается и что аккумулятор может иметь или не иметь достаточного заряда для выполнения определенных функций, требуемых хирургическим инструментом. Таким образом, экран светодиодов может указывать на возможную необходимость замены аккумулятора. При напряжении аккумулятора менее 8 В не загорается ни один из светодиодов 12112, 12122 и 12132. Таким образом, экран светодиодов может указывать на то, что аккумулятор не может использоваться для надежного выполнения любой функции хирургического инструмента. Хотя цепь 12100 содержит три цепи 12110, 12120 и 12130 индикаторов, цепь может включать в себя более трех цепей индикаторов, имеющих зенеровские диоды с отличными друг от друга разрывными напряжениями. Такой вариант осуществления может обеспечить, например, четкую дифференциальную индикацию напряжения аккумулятора. Предусмотрены другие варианты осуществления, в которых применяют только две цепи индикаторов.
В различных случаях аккумулятор может включать в себя цепь, выполненную с возможностью указания на то, что аккумулятор заряжен и/или имеет заряд, достаточный для того, чтобы использовать его вместе с хирургическим инструментом. В различных случаях хирургический инструмент может включать в себя цепь, выполненную с возможностью указания на то, что соединенный с ним аккумулятор заряжен и/или имеет заряд, достаточный для того, чтобы использовать его вместе с хирургическим инструментом. В любом случае, как показано на ФИГ. 180, цепь 12200 может включать в себя микропроцессор 12201, который включает в себя один или более ключей в соединении с аккумулятором, например, таким как аккумулятор 9 В. Цепь 12200 может дополнительно содержать конденсатор 12202, например, такой как конденсатор 10 микрофарад, который может получать энергию из цепи, включающей в себя диод 12203 и резистор 12204. Цепь 12200 может дополнительно содержать светодиод 12205 и резистор 12206 на пути разряда конденсатора 12202. Такая цепь может обеспечивать мигание светодиода 12205 до тех пор, пока аккумулятор может подавать достаточное напряжение на цепь 12200. В таких случаях пользователь может идентифицировать мигание светодиода 12205 и поймет, что аккумулятор обладает, по меньшей мере, некоторой энергией, если не достаточной энергией, для применения вместе с хирургическим инструментом. Если пользователь не идентифицирует мигания светодиода 12205, пользователь может предположить, что энергии аккумулятора недостаточно для его применения.
В различных обстоятельствах, как описано в настоящем документе и показано на ФИГ. 284, аккумулятор и/или хирургический инструмент, выполненный с возможностью применения с аккумулятором, могут включать в себя цепь диагностики, выполненную с возможностью оценки энергии, напряжения и/или тока, обеспечиваемых аккумулятором. На ФИГ. 184 показана цепь 12300 диагностики. Такая цепь может быть выполнена с возможностью оценки аккумулятора до использования с хирургическим инструментом, в процессе использования с хирургическим инструментом и/или после использования с хирургическим инструментом. В различных случаях аккумулятор может использоваться более одного раза, и в различных случаях аккумулятор может быть перезаряжаемым или неперезаряжаемым. Число применений аккумулятора и информация, полученная во время диагностической оценки аккумулятора, могут храниться в микросхеме памяти в аккумуляторе и/или хирургическом инструменте. На ФИГ. 183 представлена информационная таблица 12400, содержащая информацию такого типа, который можно зарегистрировать в микросхеме памяти. Например, может быть зарегистрировано число применений. Для каждого применения регистрируется, например, максимальное напряжение и/или максимальный ток, в соответствии с которыми аккумулятор заряжен и/или перезаряжен. При каждом применении могут регистрироваться предельно допустимый ток, применяемый ток в мА, применяемый ток в Ач и/или минимальное напряжение, прилагаемое во время применения. При каждом применении могут регистрироваться, например, время заряда аккумулятора, время применения аккумулятора, температура аккумулятора во время заряда и/или температура аккумулятора во время применения. Это лишь некоторые примеры информации, которая может храниться в памяти. В различных случаях такая информация может быть использована хирургическим инструментом и/или техническим специалистом, например, для оценки предыдущей работы аккумулятора и/или пригодности аккумулятора для дальнейшего применения.
В различных случаях, как показано на ФИГ. 182, аккумулятор и/или хирургический инструмент, используемый с аккумулятором, могут включать в себя цепь для отключения аккумулятора в случае, когда уровень заряда аккумулятора опускается ниже минимального уровня заряда. В некоторых случаях ионно-литиевый элемент аккумулятора может перегреваться при использовании в то время, когда уровень его заряда ниже минимального уровня заряда, а цепь отключения, препятствующая использованию аккумулятора при уровне заряда ниже минимального уровня заряда, может предотвратить перегрев.
В различных случаях, как показано на ФИГ. 181, хирургический инструмент может включать в себя контроллер, выполненный с возможностью выполнения диагностической проверки инструмента и/или установленного на него аккумулятора. Например, контроллер может включать в себя часы и микросхему памяти, выполненные с возможностью оценки и регистрации времени применения инструмента и/или аккумулятора. В некоторых случаях контроллер может быть выполнен с возможностью отключения инструмента и/или аккумулятора, если с момента последнего применения инструмента и/или аккумулятора прошло много времени. В некоторых случаях инструмент и/или аккумулятор могут включать в себя один или более датчиков, которые могут быть выполнены с возможностью оценки различных параметров инструмента и/или аккумулятора, например, таких как температура, влажность и/или время, в течение которого инструмент и/или аккумулятор подвергались воздействию температуры и/или влажности. Контроллер может быть выполнен с возможностью оценки правильности работы датчиков, и в случае их некорректной работы контроллер может отключить инструмент и/или аккумулятор. Контроллер также может быть выполнен с возможностью оценки числа периодов применения инструмента и/или аккумулятора, и, если число периодов применения превышает определенную величину, контроллер может отключить инструмент и/или аккумулятор. Контроллер также может быть выполнен с возможностью оценки энергии, которую может обеспечивать аккумулятор, как указано в настоящем документе, и при недостатке энергии контроллер может отключить инструмент и/или аккумулятор.
Как описано в настоящем документе, хирургический инструмент может включать в себя различные датчики для сбора данных обратной связи и/или другой информации о состоянии инструмента. Кроме того, хирургический инструмент может включать в себя сенсорные индикаторы для передачи обратной связи и/или информации о состоянии инструмента пользователю. В некоторых случаях эндоскоп может применяться вместе с хирургическим инструментом для передачи дополнительной обратной связи и/или информации о состоянии инструмента пользователю. Как описано в настоящем документе, эндоскоп и хирургический инструмент могут обмениваться сигналами с экраном, который может отображать, например, данные обратной связи, полученные от эндоскопа и/или от датчиков хирургического инструмента. Как показано на ФИГ. 75-93, эндоскоп 5018 (ФИГ. 93) может обмениваться сигналами с экраном 5002 (ФИГ. 75). В некоторых вариантах осуществления экран 5002 может содержать, например, устройство проецирования на экран (HUD) и/или видеомонитор. Кроме того, экран 5002 может представлять собой, например, плазменный экран, ЖК-экран или электролюминесцентный экран. В различный вариантах осуществления экран 5002 может транслировать первый информационный слой 5010, который может включать в себя, например, обратную связь в форме видеоизображения. Обратная связь в форме видеоизображения может представлять собой обратную связь в форме изображений, просматриваемых при помощи эндоскопа 5018 (ФИГ. 93), например, на хирургическом поле, и может отображать, например, по меньшей мере, участок хирургического инструмента 5020, просматриваемый при помощи эндоскопа 5018.
В различных вариантах осуществления экран 5002 может включать в себя сенсорный экран 5004. Как показано на ФИГ. 75, пользователь может взаимодействовать с сенсорным экраном 5004 для работы с экраном 5002 и/или хирургическим инструментом 5020. Например, сенсорный экран 5004 может обмениваться данными с экраном 5002, и устройства ввода, используемые с сенсорным экраном 5004, позволяют регулировать и/или изменять информацию, отображаемую на экране 5002. В таких вариантах осуществления пользователь может работать с экраном 5002 без использования дополнительных устройств ввода, например, таких как клавиатура и/или компьютерная мышь. Иными словами, для регулирования и/или изменения информации, отображаемой на экране 5002, могут не требоваться дополнительные инструменты и/или части ввода. Кроме того, в различных вариантах осуществления сенсорный экран 5004 легко чистить и/или стерилизовать. Например, сенсорный экран 5004 может включать в себя плоскую поверхность, которую легко можно протереть начисто в операционном поле и/или операционной. Кроме того, или альтернативно, сенсорный экран 5004 может непосредственно и/или опосредованно обмениваться сигналами с хирургическим инструментом 5020 так, что при вводе данных на сенсорном экране 5004 данные передаются хирургическому инструменту 5020. Пользователь может представлять собой, например, хирургу, оператора и/или помощника.
В различных вариантах осуществления сенсорный экран 5004 может быть расположен поверх, по меньшей мере, участка экрана 5002 и может быть, например, съемно присоединен к экрану 5002. Например, сенсорный экран 5004 может быть совместим с множеством экранов и может быть присоединен с возможностью высвобождения и отсоединен от, по меньшей мере, одного экрана. Кроме того, в некоторых вариантах осуществления сенсорный экран 5004 может представлять собой независимый экран, который может работать независимо от экрана 5002. Например, отсоединяемый ЖК-экран может содержать сенсорный экран 5004, и отсоединяемый ЖК-экран может перекрывать, по меньшей мере, участок экрана 5002. В других вариантах осуществления сенсорный экран 5004 может быть встроен в экран 5002. В сенсорном экране 5004 могут применяться, например, резистивная технология, емкостная технология, ультразвуковая лучевая технология и/или технология ближнепольной визуализации.
Как показано преимущественно на ФИГ. 93, в различных вариантах осуществления контроллер 5016 обратной связи может обмениваться сигналами с хирургическим инструментом 5020, эндоскопом 5018 и/или экраном 5002. В некоторых вариантах осуществления проводное и/или беспроводное соединение 5017 между контроллером 5016 обратной связи и эндоскопом 5018 может служить для передачи обратной связи в форме видеоизображения от эндоскопа 5018 к контроллеру 5016 обратной связи. Кроме того, проводное и/или беспроводное соединение 5019 между контроллером 5016 обратной связи и хирургическим инструментом 5020 и/или микроконтроллером хирургического инструмента 5020 может служить для передачи данных обратной связи, измеренных и/или обнаруженных хирургическим устройством 5020, к контроллеру 5016 обратной связи. Например, различные датчики описаны в настоящем документе, а также в Zemlock ‘263 и Zemlock ‘344, описание которых полностью включено в настоящий документ, и различные датчики могут обнаруживать обратную связь и/или информацию о состоянии инструмента. Кроме того, проводное и/или беспроводное соединение 5015 между контроллером 5016 обратной связи и экраном 5002 может служить для передачи данных обратной связи от хирургического инструмента 5020 и/или обратной связи в форме видеоизображения от эндоскопа 5018 на экран 5002. По меньшей мере, в одном варианте осуществления обратная связь в форме видеоизображения может отображаться в первом информационном слое 5010 на экране 5002, и данные обратной связи могут отображаться во втором информационном слое 5012 на экране 5004. В вариантах осуществления, в которых отсоединяемый ЖК-экран, содержащий сенсорный экран 5004, расположен поверх экрана 5002, проводное и/или беспроводное соединение между контроллером 5016 обратной связи и отсоединяемым ЖК-экраном может служить, например, для передачи данных обратной связи на отсоединяемый ЖК-экран и/или с ЖК-экрана к контроллеру 5010 обратной связи.
Как показано преимущественно на ФИГ. 76, экран 5002 может транслировать первый информационный слой 5010, который может содержать, например, обратную связь в форме видеоизображения от эндоскопа 5018 (ФИГ. 93). В различных случаях обратная связь 5010 в форме видеоизображения может включать в себя изображение хирургического инструмента 5020, воздействующего на ткань T. В различных вариантах осуществления хирургический инструмент 5020 может быть аналогичен, например, хирургическому инструменту 10 (ФИГ. 1), и одноразовый загрузочный блок (ОЗБ) и/или концевой эффектор 5022, связанный с хирургическим инструментом, может быть аналогичен, например, загрузочному блоку 20 (ФИГ. 2). ОЗБ 5022 хирургического инструмента 5020 может шарнирно поворачиваться относительно ткани T, захватывать и/или зажимать ткань T между парой бранш, сшивать ткань Т скобками и/или разрезать ткань T при помощи режущего элемента, как описано в настоящем документе. Кроме того, эндоскоп 5018, который может быть расположен на хирургическом поле и/или рядом с ним, может просматривать ОЗБ 5022 и может передавать видеосигнал и/или запись контроллеру 5016 обратной связи (ФИГ. 93). В различных вариантах осуществления обратная связь в форме видеоизображения в первом информационном слое 5010 на экране 5002 может представлять собой визуальную обратную связь, позволяющую пользователю хирургического инструмента 5020 видеть хирургическое поле в режиме реального времени.
Как показано преимущественно на ФИГ. 77, на экране 5002 может отображаться второй информационный слой 5012. Кроме того, пользователь может выбирать, перемещать, изменять размер, уменьшать, растягивать, изменять и/или совершать иные действия относительно второго информационного слоя 5012. Например, пользователь может работать со вторым информационным слоем 5012 путем взаимодействия с сенсорным экраном 5004. Как описано в настоящем документе, второй информационный слой 5012 может включать в себя данные обратной связи от хирургического инструмента 5020 и/или контролировать управление хирургическим инструментом 5020. В различных вариантах осуществления второй информационный слой 5012 может включать в себя панель 5030 управления, и сенсорный экран 5004 может применяться для выбора и/или использования элементов панели 5030 управления. Панель 5030 управления можно свернуть, изменить ее размер, переместить и/или выполнить с ней иные действия посредством сенсорного экрана 5004. Например, пользователь может уменьшить или свернуть панель 5030 управления путем выбора значка 5032 уменьшения/увеличения и может увеличить или развернуть панель 5030 управления путем повторного выбора значка 5032 уменьшения/увеличения. Кроме того, пользователь может перемещать панель 5030 управления на экране 5002, например, путем перетаскивания панели 5030 управления на экране 5002. Кроме того, пользователь может изменять размер панели 5030 управления на экране 5002 путем сжимания и/или растягивания множества контактных точек на сенсорном экране 5004. Специалисту в данной области будет понятно, что различные традиционные и/или интуитивно понятные контактные элементы для взаимодействия с сенсорным экраном 5004 могут применяться для изменения и/или управления, например, вторым информационным слоем 5012 и/или панелью 5030 управления.
Как показано на ФИГ. 77, панель 5030 управления может включать в себя множество меню, категорий и/или классификаций. Например, панель 5030 управления может включать в себя меню 5036 обратной связи инструмента, меню 5060 экрана и/или меню 5070 контроллера инструмента. Пользователь может использовать панель 5030 управления для выбора меню и/или для переключения между эксплуатационными состояниями сенсорного экрана 5004. Например, сенсорный экран 5004 может передавать команды и/или сигналы управления контроллеру 5016 (ФИГ. 93) и/или микроконтроллеру инструмента при выборе пользователем меню 5070 контроллера инструмента на панели 5030 управления. В таких вариантах осуществления, как описано в настоящем документе, сенсорный экран 5004 может функционировать в состоянии управления инструментом. Кроме того, настройки, связанные со вторым информационном слоем 5012 и/или экраном 5002, например, могут быть изменены пользователем при выборе меню 5060 экрана на панели 5030 управления. В таких вариантах осуществления сенсорный экран 5004 может функционировать в состоянии изменения настроек. Кроме того, или альтернативно, данные обратной связи, содержащиеся во втором информационном слое 5012, могут быть изменены пользователем при выборе меню 5036 обратной связи инструмента. В таких вариантах осуществления сенсорный экран 5004 может функционировать в состоянии управления обратной связью. В различных вариантах осуществления панель 5030 управления может включать в себя дополнительные и/или более мелкие меню, категории и/или классификации. Кроме того, различные меню, категории и/или классификации панели 5030 управления можно изменить, например, в соответствии с предпочтениями пользователя. Меню, категории и/или классификации могут иметь словесное и/или символическое обозначение во втором информационном слое 5012. В различных вариантах осуществления категории в каждом меню 5036, 5060, 5070 могут выборочно отображаться во втором информационном слое 5012. Например, категории в каждом меню 5036, 5060, 5070 могут отображаться только во втором информационном слое 5012 при выборе пользователем соответственного расположенного выше меню 5036, 5060, 5070. В других вариантах осуществления пользователь может, например, вручную довести до минимума и/или довести до максимума категории и/или подкатегории, соответствующие каждому меню 5036, 5060 и/или 5070.
Как показано на ФИГ. 77, меню 5036 обратной связи инструмента может включать в себя множество категорий обратной связи и может устанавливать связь с данными обратной связи, измеренными и/или обнаруженными хирургическим инструментом 5020 (ФИГ. 93) во время хирургического вмешательства. Как описано в настоящем документе, хирургический инструмент 5020 может обнаруживать и/или измерять положение бранши, выполненной с возможностью перемещения, между открытым положением и закрытым положением, толщину зажатой ткани, усилие зажима, воздействующее на зажатую ткань, шарнирный поворот ОЗБ 5022 и/или, например, положение, скорость и/или усилие пускового элемента. Кроме того, контроллер 5016 обратной связи (ФИГ. 93), обменивающийся сигналами с хирургическим инструментом 5020, может служить для передачи полученной обратной связи на экран 5002, который может отображать обратную связь во втором информационном слое 5012. Как описано в настоящем документе, выбор, размещение и/или формирование данных обратной связи, отображаемых во втором информационном слое 5012, можно изменить, например, на основании пользовательского ввода на сенсорном экране 5004.
В различных вариантах осуществления меню 5060 экрана панели 5030 управления может устанавливать связь с множеством категорий, таких как, например, системы 5062 единиц и/или режимы 5064 данных. В некоторых вариантах осуществления пользователь может выбрать категорию 5062 систем единиц для переключения между системами единиц, например, между метрическими единицами и системой единиц мер и весов, основанной на имперской системе. Кроме того, пользователь может выбрать категорию 5064 режимов данных для переключения между типами числовых представлений (ФИГ. 79-81) данных обратной связи и/или, например, между типами графических представлений (ФИГ. 82-83) данных обратной связи. Числовые представления данных обратной связи могут отображаться, например, в виде числовых значений и/или процентного выражения. Кроме того, графические представления данных обратной связи могут отображаться, например, в виде функции времени (ФИГ. 82) и/или расстояния (ФИГ. 83). Как описано в настоящем документе, пользователь может выбрать меню 5070 контроллера инструмента на панели 5030 управления для ввода команд для хирургического инструмента 5020 (ФИГ. 93), которые могут быть реализованы, например, посредством контроллера 5016 инструмента (ФИГ. 93) и/или микроконтроллера.
Как показано на ФИГ. 78, второй информационный слой 5012 может перекрывать, по меньшей мере, участок первого информационного слоя 5010 на экране 5002. Кроме того, сенсорный экран 5004 позволяет пользователю управлять вторым информационным слоем 5012 относительно обратной связи в форме видеоизображения в расположенном ниже первом информационном слое 5010 на экране 5002. Например, пользователь может использовать сенсорный экран 5004 для выбора, управления, изменения формата, изменения размера и/или иного изменения информации, отображаемой во втором информационном слое 5012. В некоторых вариантах осуществления пользователь может использовать сенсорный экран 5004 для управления вторым информационным слоем 5012 относительно хирургического инструмента 5020, отображаемого в первом информационном слое 5010 на экране 5002. Пользователь может, например, выбрать меню, категорию и/или классификацию панели 5030 управления, и второй информационный слой 5012 и/или панель 5030 управления выполнены с возможностью подгонки для отражения выбора пользователя. В различных вариантах осуществления пользователь может выбрать категорию из категории 5036 обратной связи инструмента, которая соответствует конкретному элементу или элементам хирургического инструмента 5020, отображаемым в первом информационном слое 5010. Обратная связь, соответствующая выбранной пользователем категории, может перемещаться, располагаться и/или «привязываться» к положению на экране 5002 относительно конкретного элемента или элементов хирургического инструмента 5020. Например, выбранная обратная связь может перемещаться в положение рядом и/или в положение с наложением на конкретный элемент или элементы хирургического инструмента 5020, отображаемые в первом информационном слое 5010.
Как показано на ФИГ. 79 и 80, при выборе пользователем, например, категории 5040 продвижения скальпеля из меню 5036 обратной связи инструмента полученные данные и/или информация, относящаяся к продвижению скальпеля, может перемещаться и/или «привязываться» к положению во втором информационном слое 5012 относительно скальпеля ОЗБ 5022, отображаемого в первом информационном слое 5010. Дополнительно панель 5030 управления может быть свернута и/или уменьшена после того. как пользователь выбрал желаемую категорию или категории из меню 5036 обратной связи инструмента. Данные 5052 обратной связи, относящиеся к продвижению скальпеля, могут отображаться на экране 5002 рядом с обнаруженным скальпелем ОЗБ 5022, отображаемым в первом информационном слое 5010, и могут перемещаться, например, между первым положением (ФИГ. 79), когда скальпель находится ближе к началу пускового хода, и вторым положением (ФИГ. 80), когда скальпель находится ближе к дистальному концу пускового хода, при поступательном перемещении и/или перемещении скальпеля через ОЗБ 5022. Например, при поступательном перемещении скальпеля на расстояние Х мм данные 5052, относящиеся к продвижению скальпеля, могут размещаться в первом положении (ФИГ. 79), а при поступательном перемещении скальпеля на расстояние Y мм данные 5052, относящиеся к продвижению скальпеля, могут размещаться во втором положении (ФИГ. 80). В таких вариантах осуществления оператор может отслеживать продвижение скальпеля во время пускового хода, считывая данные 5052 обратной связи на экране 5002. Например, бранши 5024 концевого эффектора и/или ткань Т блокируют обзор скальпеля ОЗБ 5022, например, оператор может отслеживать и/или приблизительно точно определять положение скальпеля в ОЗБ 5020 на основании изменения величины данных 5052 обратной связи и/или смещения положения данных 5052 обратной связи относительно ОЗБ 5022, отображаемого в расположенном ниже первом информационном слое 5010. Кроме того, экран 5002 может включать числовое представление продвижения скальпеля, а также пиктографическое и/или символическое представление продвижения скальпеля. Например, символ 5054, такой как стрелка, может перемещаться и/или проходить относительно ОЗБ 5022, отображаемого в расположенном ниже первом информационном слое 5010, для демонстрации продвижения скальпеля через ОЗБ 5022. Например, как показано на ФИГ. 79 и 80, символ 5054 может проходить дистально при выдвижении скальпеля дистально, например, из положения рядом с началом пускового хода (ФИГ. 79) в положение рядом с дистальным концом пускового хода (ФИГ. 80).
В различных вариантах осуществления пользователь может выбрать одну или более отличных друг от друга категорий данных обратной связи из меню 5036 обратной связи инструмента, и отличные друг от друга категории данных обратной связи могут отображаться во втором информационном слое 5012 на экране 5002. В таких вариантах осуществления при выборе пользователем отличной от других категории данных обратной связи из меню 5036 обратной связи инструмента числовое и/или символическое представление данных обратной связи может перемещаться в соответствующее положение на экране 5002 относительно ОЗБ 5022, отображаемого в расположенном ниже первом информационном слое 5010. Например, при выборе пользователем категории 5038 положения бранши из меню 5036 обратной связи инструмента данные обратной связи, относящиеся к положению бранши, выполненной с возможностью перемещения между открытым положением и зажатым положением, могут отображаться во втором информационном слое 5012 и, например, могут перемещаться в положение рядом с выполненной (-ыми) с возможностью перемещения браншей (-ами) 5024 хирургического инструмента 5020 на экране 5002. Кроме того, при выборе категории 5042 скорости скальпеля данные 5058 обратной связи (ФИГ. 82), относящиеся к скорости скальпеля, могут отображаться во втором информационном слое 5012 и могут перемещаться в положение рядом со скальпелем в ОЗБ 5022 на экране 5002 аналогично числовым данным 5052 и/или символу 5054, описанному выше. При выборе пользователем категории 5044 толщины ткани данные обратной связи, относящиеся к обнаруженной толщине ткани, могут отображаться во втором информационном слое 5012 и, например, могут перемещаться в положение рядом с измеренной тканью T на экране 5002. Кроме того, по меньшей мере, в одном варианте осуществления второй информационный слой 5012 может включать в себя шкалу и/или линейку, которая может показывать обнаруженную толщину ткани. Пользователь может перемещать линейку посредством сенсорного экрана 5004 относительно расположенной ниже ткани T, отображаемой в первом информационном слое 5010, что может помочь пользователю, например, оценить изменения толщины ткани. При выборе пользователем категории 5046 шарнирного поворота концевого эффектора данные 5252 обратной связи (ФИГ. 84-88), относящиеся к шарнирному повороту ОЗБ 5022, могут отображаться во втором информационном слое 5012 и могут перемещаться, например, в положение рядом с шарнирным сочленением 5026 (ФИГ. 84 и 85) ОЗБ 5022 на экране 5002. При выборе пользователем категории 5048 пускового усилия данные обратной связи, относящиеся к пусковому усилию, оказываемому скальпелем на ткань, могут отображаться во втором информационном слое 5012 и могут быть расположены, например, рядом со скальпелем ОЗБ 5022 на экране 5002. Кроме того, данные обратной связи, относящиеся к пусковому усилию, прилагаемому скальпелем, могут перемещаться во второй информационный слой 5012 при перемещении скальпеля относительно ОЗБ 5022, например, во время пускового хода. Кроме того, при выборе категории 5050 усилия зажима данные 5158 обратной связи (ФИГ. 83), относящиеся к усилию зажима, воздействующему на ткань T, могут отображаться во втором информационном слое 5012 и могут перемещаться рядом с ОЗБ 5022, отображаемом в расположенном ниже первом информационном слое 5010. В таких вариантах осуществления данные 5158 обратной связи, относящиеся к усилию зажима, могут варьироваться в части давления зажима по длине и/или ширине ОЗБ 5022, например, во время зажима и/или на протяжении пускового хода.
В различных вариантах осуществления обратная связь, отображаемая во втором информационном слое 5012, может перемещаться вместе с соответственным элементом хирургического инструмента 5020 в первом информационном слое 5010. Например, при перемещении ОЗБ 5022 по хирургическому полю ОЗБ 5022 может перемещаться по экрану 5002. В таких вариантах осуществления обратная связь, относящаяся к ОЗБ 5022, например, такая как положение бранши и/или данные о шарнирном повороте, может перемещаться вместе с ОЗБ 5022. Перемещение соответственной обратной связи способствует тому, что обратная связь остается в поле зрения оператора, при этом оператору необязательно отрывать взгляд от соответствующего элемента хирургического инструмента 5020, отображаемого в первом информационном слое 5010 на экране 5002. Кроме того, перемещение соответствующей обратной связи способствует тому, что обратная связь не блокирует элемент (-ы) хирургического инструмента 5020, отображаемый (-ые) в первом информационном слое 5010, который (-ые) оператору желательно видеть на экране 5002.
В некоторых вариантах осуществления пользователь может выбрать множество категорий обратной связи для просмотра на экране 5002 одновременно. Кроме того, выбранная обратная связь, или типы обратной связи, выполнена с возможностью автоматического размещения на экране 5002 для отображения релевантных данных без наложений во втором информационном слое 5012. Иными словами, обратная связь, отображаемая во втором информационном слое 5012, может не накладываться на другую обратную связь, отображаемую во втором информационном слое 5012; однако такая обратная связь может накладываться, например, на обратную связь в форме видеоизображения первого информационного слоя 5010, отображаемого на экране 5002. В различных вариантах осуществления при перемещении и/или «привязке» данных обратной связи к положению на экране относительно хирургического инструмента 5020, отображаемого в расположенном ниже первом информационном слое 5010, пользователь может корректировать положение по умолчанию путем «перетаскивания» данных обратной связи в любое другое место во втором информационном слое 5012.
Как показано на ФИГ 81, символическое представление 5056 продвижения скальпеля, например, такое как крестик, мишень и/или пиктографическое представление скальпеля и/или лезвия скальпеля, может перемещаться в положение во втором информационном слое 5012, которое накладывается на положение скальпеля, отображаемое в первом информационном слое 5010. В некоторых вариантах осуществления, даже если скальпель не виден на экране 5002, например, если скальпель скрыт, символическое представление 5056 скальпеля может перемещаться и/или следовать в обнаруженное положение скальпеля в ОЗБ 5022 на экране 5002. Например, символическое представление 5056 может находится в первом положении относительно ОЗБ 5022 рядом с началом пускового хода, и символическое представление 5056 перемещается во второе положение относительно ОЗБ 5022 рядом с концом пускового хода.
В различных вариантах осуществления обратная связь, выбранная пользователем посредством сенсорного экрана 5004, может «привязываться» к углу, краю и/или другим заданным точкам на экране 5002. Например, как показано на ФИГ. 81, числовые данные 5052, относящиеся к продвижению скальпеля, могут перемещаться в угол экрана 5002. Кроме того, или альтернативно, пользователь может взаимодействовать с сенсорным экраном 5004 для перемещения числовых данных 5052 в другое положение на сенсорном экране 5004. На основании положения хирургического инструмента 5020, расположенного ниже в первом информационном слое 5010, пользователь может перемещать числовые данные 5052 в положение во втором информационном слое 5012 так, что числовые данные 5052 не блокируют и/или не перекрывают соответствующий и/или определенный элемент ОЗБ 5022. Кроме того, или альтернативно, пользователь может перемещать числовые данные 5052 в положение рядом с соответствующим элементом ОЗБ 5022 так, что пользователь может легко просматривать соответствующий элемент ОЗБ 5022 и числовые данные 5052 одновременно.
Как показано на ФИГ. 84 и 85, символическое представление 5254 (ФИГ. 85) данных обратной связи, полученных от контроллера 5016 обратной связи (ФИГ. 93), может быть включено во второй информационный слой 5012. Например, символическое представление 5254 шарнирного поворота ОЗБ 5022, например, такого как стягиваемый угол и/или дуга, может отображаться во втором информационном слое 5012 и может перемещаться в положение на экране 5002 рядом и/или поверх шарнирного сочленения 5026 хирургического инструмента 5020, отображаемого в первом информационном слое 5010. Например, стягиваемая дуга может проходить между осью A, образованной ОЗБ 5022 без шарнирного поворота (ФИГ. 84), и осью A’, образованной ОЗБ 5022 с шарнирным поворотом (ФИГ. 85). В некоторых вариантах осуществления, даже если шарнирное сочленение 5026 не отображается на экране, символическое представление 5254 угла шарнирного поворота может отображаться во втором информационном слое 5012. Например, если шарнирное сочленение 5026 не установлено в пределах поля обзора эндоскопа и/или ограничено или заблокировано, символическое представление 5254 угла шарнирного поворота может обеспечивать визуальную индикацию шарнирного поворота для пользователя. В различных вариантах осуществления символическое представление 5252 может регулироваться и/или изменяться при перемещении и/или шарнирном повороте ОЗБ 5022. Например, символическое представление 5254 может иметь вид показанной стрелкой дуги или линии, которая может проходить от исходного положения и/или положения ОЗБ 5022 без шарнирного поворота (ФИГ. 84) к положению ОЗБ 5022 с шарнирным поворотом (ФИГ. 85), как обнаружено инструментом 5020. Кроме того, в различных вариантах осуществления символическое представление 5254 может «привязываться» к положению относительно ОЗБ 5022, отображаемого в первом информационном слое так, что символическое представление 5254 накладывается и/или совмещается с ОЗБ 5022. Например, как показано преимущественно на ФИГ. 85, символическое представление 5254 угла шарнирного поворота может перемещаться на и/или в положение рядом с шарнирным сочленением 5026, отображаемым в первом информационном слое 5010 на экране 5002, и может растягиваться между осью A, образованной ОЗБ 5022 в исходном положении и/или положении без шарнирного поворота, и осью A’, образованной ОЗБ 5022 при шарнирном повороте ОЗБ 5022.
Кроме того, в различных вариантах осуществления числовые данные 5252, относящиеся к шарнирному повороту ОЗБ 5022, могут отображаться во втором информационном слое 5012 на экране 5002. Кроме того, данные 5252 могут изменяться при шарнирном повороте ОЗБ 5022. Например, второй информационный слой 5012 может отображать шарнирный поворот X° до шарнирного поворота ОЗБ 5022 (ФИГ. 84) и может отображать шарнирный поворот Y° после шарнирного поворота ОЗБ 5022 (ФИГ. 85). В различных вариантах осуществления данные 5252 обратной связи относительно шарнирного поворота ОЗБ 5022 могут отображаться во втором информационном слое 5012, например, на и/или рядом с шарнирным сочленением 5026 хирургического инструмента 5020, отображаемого в первом информационном слое 5010. Пользователь может использовать сенсорный экран 5004 для перемещения, изменения размера, уменьшения и/или совершения других действий с данными 5252 шарнирного поворота, отображаемыми во втором информационном слое 5012, например, относительно обратной связи в форме видеоизображения, отображаемой в первом информационном слое 5010. Кроме того, или альтернативно, пользователь может взаимодействовать с сенсорным экраном 5004 для перемещения символического представления 5254 и/или числовых данных 5252 в другое положение на сенсорном экране 5004. На основании положения хирургического инструмента 5020, расположенного ниже в первом информационном слое 5010, пользователь может перемещать числовые данные 5252 в положение во втором информационном слое 5012 так, что числовые данные 5252 не блокируют и/или не перекрывают определенный (-ые) элемент (-ы) ОЗБ 5022. Кроме того, или альтернативно, пользователь может перемещать числовые данные 5252 в положение рядом с соответствующим (-ими) элементом (-ами) ОЗБ 5022 так, что пользователь может легко просматривать соответствующий (-щие) элемент (-ы) ОЗБ 5022 и числовые данные 5252 одновременно.
Как показано на ФИГ. 82, графическое представление можно выбрать из меню 5060 экрана панели 5030 управления, например, при помощи сенсорного экрана 5004. В таких вариантах осуществления графическое представление обратной связи 5058 может отображаться во втором информационном слое 5012 на экране 5002. Пользователь может выбрать графическое представление для просмотра измеренных и/или полученных данных хирургического инструмента 5020 и/или его контроллера относительно времени и/или пространственного положения. Например, пользователь хочет наблюдать за скоростью пускового элемента на протяжении всего пускового хода, и для этого он может выбрать категорию 5042 скорости скальпеля (ФИГ. 78) из меню 5036 обратной связи инструмента (ФИГ. 78). В таких вариантах осуществления графическое представление 5058 скорости скальпеля может, например, продолжать получать опорные точки и расти во время пускового хода. В различных вариантах осуществления после завершения пускового хода графическое представление 5058 может отображать период 5057 плавного старта и/или период 5059 плавной остановки скальпеля. Кроме того, графическое представление 5058 может быть установлено на экран 5002 так, что скорость скальпеля в конкретном местоположении вдоль длины бранш 5024 концевого эффектора соответствует конкретному местоположению вдоль длины бранш 5022 концевого эффектора, что отображено в первом информационном слое 5010. Например, графическое представление 5058 может начинаться в начале и/или в непосредственной близости к началу пути скальпеля через ОЗБ 5022, отображаемого в первом информационном слое 5010, и может заканчиваться в конце и/или в непосредственной близости к концу пути скальпеля через ОЗБ 5022, отображаемого в первом информационном слое 5010. Кроме того, как описано в настоящем документе, графическое представление 5058 может «привязываться» к соответствующему положению на экране, и пользователь может использовать сенсорный экран 5004, например, для перемещения и/или изменения размера графического представления 5058 по своему желанию. В некоторых вариантах осуществления числовое представление пусковой скорости может отображаться во втором информационном слое 5012 вместе с графическим представлением 5058.
Как показано на ФИГ. 83, в различных вариантах осуществления пользователю может быть необходимо наблюдать за усилием зажима, воздействующим на ткань Т по длине и/или по ширине бранш 5024 концевого эффектора, и для этого он может выбрать категорию 5050 усилия зажима (ФИГ. 78) из меню 5036 обратной связи инструмента (ФИГ. 78). В таких вариантах осуществления графическое представление 5158 усилия зажима может отображаться во втором информационном слое 5012. В некоторых вариантах осуществления графическое представление 5158 может быть расположено во втором информационном слое 5012 относительно зажатой ткани, отображаемой в первом информационном слое 5010. Например, графическое представление 5158 может начинаться в начале и/или в непосредственной близости к началу проксимального конца бранш 5024, отображаемому в первом информационном слое 5010, и может заканчиваться в конце и/или в непосредственной близости к концу дистального конца бранш 5024, отображаемому в первом информационном слое 5010. Кроме того, как описано в настоящем документе, графическое представление 5158 может «привязываться» к соответствующему положению на экране, и пользователь может использовать сенсорный экран 5004, например, для перемещения и/или изменения размера графического представления 5158. В некоторых вариантах осуществления графическое представление может изменяться во время применения, например, для отображения изменений усилия зажима во время пускового хода.
Как показано на ФИГ. 86-88, в различных вариантах осуществления пользователь может взаимодействовать с сенсорным экраном 5004 для ввода команд управления и/или указаний для хирургического инструмента 5020 посредством контроллера 5016 инструмента и/или микроконтроллера. Например, пользователь может вводить команды управления относительно шарнирного поворота ОЗБ 5022, зажимая бранши 5024 концевого эффектора, выдвигая и/или втягивая режущий элемент и/или выталкивая скобки из ОЗБ 5022. В различных вариантах осуществления пользователь может выбирать категорию 5070 контроллера инструмента с панели 5030 управления посредством сенсорного экрана 5004 для активации состояния управления инструментом так, что пользователь может управлять хирургическим инструментом 5020 посредством сенсорного экрана 5004. При активации сенсорного экрана 5004 для управления инструментом пользователь может взаимодействовать с сенсорным экраном 5004 для управления хирургическим инструментом 5020. Например, пользователь может взаимодействовать с кнопками управления и/или значками во втором информационном слое 5012 и/или может взаимодействовать с точками на сенсорном экране 5004, которые соответствуют расположенному ниже хирургическому инструменту 5020, для ввода команд для хирургического инструмента 5020.
Например, как показано на ФИГ. 86, пользователь может взаимодействовать с сенсорным экраном 5004, например, для указания желаемого направления и угла шарнирного поворота ОЗБ 5022. В некоторых вариантах осуществления пользователь может перетаскивать контактную точку по сенсорному экрану 5004 от ОЗБ 5022 и/или близлежащей точки к месту желаемого шарнирного поворота концевого эффектора 5002. Как показано на ФИГ. 86, пользователь может прочертить линию или дугу 5352 от ОЗБ 5022 и/или близлежащей точки, изображенной в первом информационном слое 5010, к месту желаемого шарнирного поворота ОЗБ 5022. Например, дуга 5352 может проходить от и/или приблизительно от оси A, образованной ОЗБ 5022, и дуга 5352 может проходить до оси A’, образованной ОЗБ 5022 в желаемом положении шарнирного поворота. Кроме того, дуга 5352 может проходить, например, в направлении, обозначенном стрелкой 5354. В некоторых вариантах осуществления дуга 5352 может не отображаться во втором информационном слое 5010, когда пользователь вводит желаемый шарнирный поворот посредством сенсорного экрана 5004. В различных вариантах осуществления сенсорный экран 5004 может передавать желаемый угол шарнирного поворота в контроллер 5016 инструмента (ФИГ. 93) и/или микроконтроллер, которые могут выполнять шарнирный поворот ОЗБ 5022 под желаемым углом шарнирного поворота. Как показано на ФИГ. 88, контроллер 5016 инструмента (ФИГ. 93) и/или микроконтроллер могут выполнить шарнирный поворот ОЗБ 5022 к оси A’, например, на основании пользовательского ввода посредством сенсорного экрана 5004.
Как показано преимущественно на ФИГ. 87, в различных вариантах осуществления пользователь может воздействовать на кнопки управления, схемы и/или значки в первом информационном слое 5012 для передачи команд хирургическому инструменту 5020. Например, первый информационный слой 5012 может включать в себя символ или значок 5356, и пользователь может перемещать и/или управлять значком 5356 для выполнения шарнирного поворота ОЗБ 5022. В различных вариантах осуществления значок 5356 может включать в себя, например, схему ОЗБ 5022. Кроме того, пользователь может перетаскивать значок 5356 в положение шарнирного поворота и/или повернутое положение для выполнения шарнирного поворота ОЗБ 5022. В различных вариантах осуществления линия и/или дуга 5358 может включать в себя направление и/или степень шарнирного поворота, необходимые для пользователя. Например, дуга 5358 может проходить от положения значка 5356 без шарнирного поворота к положению значка 5356’ с шарнирным поворотом. Значок 5356’ с шарнирным поворотом может соответствовать, например, желаемому шарнирному повороту ОЗБ 5022. Как показано на ФИГ. 88, контроллер 5016 инструмента и/или микроконтроллер могут выполнить шарнирный поворот ОЗБ 5022 к оси A’, например, на основании пользовательского ввода посредством сенсорного экрана 5004. Например, ОЗБ 5022 можно шарнирно повернуть под стягиваемым углом, образованным дугой 5358 между значком 5356 без шарнирного поворота и значком 5356’ с шарнирным поворотом, как показано на ФИГ. 87.
Как показано преимущественно на ФИГ. 89 и 90, в различных вариантах осуществления пользователь может взаимодействовать с сенсорным экраном 5004 для передачи хирургическому инструменту 5020 команд, связанных с закрытием бранш 5024. В некоторых вариантах осуществления пользователь может перетаскивать контактную точку по сенсорному экрану 5004 от выполненной с возможностью перемещения бранши 5024 и/или близлежащей точки к закрытому положению выполненной с возможностью перемещения бранши 5024, чтобы инициировать закрытие бранши 5024. Например, пользователь может прочертить линию или дугу 5362 (ФИГ. 89) от выполненной с возможностью перемещения бранши 5024 и/или близлежащей точки, отображаемой в первом информационном слое 5010, к месту желаемого положения закрытия выполненной с возможностью перемещения бранши 5024. В различных вариантах осуществления сенсорный экран 5004 может передавать закрывающее движение контроллеру 5016 инструмента и/или микроконтроллеру, которые могут выполнять закрытие выполненной (-ых) с возможностью перемещения бранши (бранш) 5024. В некоторых вариантах осуществления дуга 5362, прочерченная пользователем на сенсорном экране 5004, может проходить от и/или приблизительно от оси A, образованной выполненной с возможностью перемещения браншей 5024, и дуга 5362 может проходить до оси A’ (ФИГ. 90), образованной выполненной с возможностью перемещения браншей 5024 в желаемом зажатом положении. Кроме того, дуга 5362 может проходить, например, в направлении, обозначенном стрелкой 5364. Как показано на ФИГ. 90, контроллер 5016 инструмента и/или микроконтроллер могут влиять на закрытие выполненной с возможностью перемещения бранши 5024 относительно оси A’, например, на основании пользовательского ввода посредством сенсорного экрана 5004.
Как показано на ФИГ. 91 и 92, в различных вариантах осуществления пользователь может воздействовать на кнопки управления и/или значки в первом информационном слое 5012 для передачи команд хирургическому инструменту 5020. Например, первый информационный слой 5012 может включать в себя интерфейс 5072 управления, который может включать в себя кнопки 5074, 5075, 5076, 5077, 5078 для введения команд для контроллера 5016 инструмента и/или микроконтроллера. Кнопки для передачи команд контроллеру 5016 инструмента (ФИГ. 93) и/или микроконтроллеру могут относится, например, к шарнирному повороту ОЗБ 5022, закрытию и/или сжатию бранш 5024, выталкиванию и/или втягиванию режущего элемента и/или выталкиванию скобок из ОЗБ 5022. Пользователь может взаимодействовать с сенсорным экраном 5004 для выбора кнопки или кнопок через интерфейс 5072 управления. Как показано преимущественно на ФИГ. 91, интерфейс 5072 управления может включать в себя кнопку 5474 остановки/втягивания, кнопку 5475 временной остановки, кнопку 5476 пуска, кнопку 5477 ускорения и/или кнопку 5478 замедления. Пользователь может воздействовать, например, на кнопку 5476 пуска, чтобы инициировать пусковой ход и/или выдвинуть пусковой элемент, на кнопку 5475 временной остановки, чтобы приостановить пусковой ход, и/или на кнопку 5474 остановки/втягивания, чтобы остановить пусковой ход и втянуть пусковой элемент. Кроме того, пользователь может взаимодействовать с интерфейсом 5072 управления для регулирования скорости пускового элемента на протяжении пускового хода. Например, пользователь может воздействовать на кнопку 5477 ускорения, чтобы увеличить скорость пускового элемента, и пользователь может воздействовать на кнопку 5478 замедления, чтобы снизить скорость пускового элемента. Пользователь может, например, увеличить скорость пускового элемента после и/или во время фазы плавного пуска пускового хода и может, например, снизить скорость пускового элемента в фазе плавной остановки пускового хода к концу пускового хода. В других вариантах осуществления интерфейс 5072 управления может включать в себя кнопки и/или средства управления, например, для изменения закрытия бранш 5024 и/или шарнирного поворота ОЗБ 5022. В различных вариантах осуществления интерфейс 5072 управления может быть «привязан» к положению во втором информационном слое 5012 при выборе меню контроллера 5070 инструмента на панели 5030 управления и/или при выборе состояния управления инструментом, осуществляемом пользователем иным способом. Пользователь может, например, перемещать, регулировать и/или управлять интерфейсом 5072 управления относительно первого информационного слоя 5010 и/или экрана 5002.
В различных вариантах осуществления, как показано на ФИГ. 92, второй информационный слой 5012 может включать в себя линейку 5480 продвижения, которая может, например, указывать положение пускового элемента в ОЗБ 5022. Линейка 5480 продвижения может проходить между проксимальным концом 5482 и дистальным концом 5488 и может формировать самое проксимальное положение и самое дистальное положение пускового элемента во время пускового хода. В различных вариантах осуществления, например, может быть предусмотрена индикация положения пускового элемента вдоль линейки 5480 продвижения. В некоторых вариантах осуществления пользователь может использовать средства управления на интерфейсе 5072 управления для регулирования пускового хода. Например, пользователь может взаимодействовать с интерфейсом 5072 управления для запуска и/или прекращения фаз плавного старта и/или плавной остановки пускового хода на основании указанного положения пускового элемента вдоль линейки 5480 продвижения. Кроме того, линейка 5480 продвижения может включать в себя измерительную шкалу и/или направляющие 5484, 5486, которые могут быть установлены в положения вдоль линейки 5480 продвижения, где, например, могут начинаться и/или заканчиваться фазы плавного пуска и/или плавной остановки. Направляющие 5484, 5486 могут служить для пользователя, например, визуальным индикатором начала и/или завершения периода плавного старта при помощи кнопки 5077 ускорения и/или фазы плавной остановки при помощи кнопки 5078 замедления во время пускового хода. В различных вариантах осуществления положение направляющих 5484, 5486 может быть предварительно задано пользователем.
Как показано на ФИГ. 92, в различных вариантах осуществления контроллер 5016 инструмента и/или микроконтроллер могут автоматически влиять на изменения скорости пускового элемента на основании положения направляющих 5484, 5486 вдоль линейки 5480 продвижения. Кроме того, пользователь может взаимодействовать с сенсорным экраном 5004 для перемещения и/или управления линейкой 5480 продвижения, и, таким образом, для изменения фаз плавного старта и/или плавной остановки пускового хода. Например, фазы плавного старта и/или плавной остановки могут быть заданы в заданных положениях вдоль линейки 5480 продвижения между проксимальным концом 5482 и дистальным концом 5488. В некоторых вариантах осуществления пользователь может взаимодействовать с сенсорным экраном 5004 для перемещения и/или регулирования положения направляющих 5484, 5486 вдоль линейки 5480 продвижения. Например, пользователь может переводить направляющие 5484, 5486 между множеством положений на линейке 5480 продвижения путем оттягивания и/или высвобождения направляющих 5484, 5486 для удлинения и/или сокращения фаз плавного пуска и/или плавной остановки пускового хода. В некоторых вариантах осуществления пользователь может взаимодействовать с сенсорным экраном 5004 для перемещения и/или регулирования положения дистального конца 5488 линейки 5480 продвижения для удлинения и/или сокращения пускового хода. Например, пользователь может перетаскивать дистальный конец 5488 проксимально для сокращения пускового хода и/или, например, может перетаскивать дистальный конец 5488 дистально для удлинения пускового хода. В различных вариантах осуществления контроллер 5016 инструмента и/или микроконтроллер могут регулировать скорость пускового элемента и/или длину пускового хода, например, за счет измененных положений направляющих 5484, 5486 и/или дистального конца 5488 вдоль линейки 5480 продвижения.
В различных вариантах осуществления хирургический инструмент 10 может включать в себя, по меньшей мере, один механизм отключения. Как более подробно описано в настоящем документе, такой механизм отключения может препятствовать несанкционированному применению хирургического инструмента конечным пользователем. Например, на ФИГ. 134 показан источник 2500 электропитания. Источник 2500 электропитания можно использовать для подачи электропитания на хирургический инструмент, такой как, например, хирургический инструмент 10 (см ФИГ. 1), и он во многих отношениях аналогичен другим источникам электропитания, более подробно описанным в других разделах настоящего документа, таким как, например, источник 200 электропитания (см. ФИГ. 1) и другие источники электропитания такого типа, который более подробно описан в публикации Zemlok ‘763, полностью включенной в настоящий документ путем ссылки. Для защиты источника 2500 электропитания от несанкционированного применения источник 2500 электропитания может быть выполнен с возможностью становиться нерабочим или неактивными в случае несанкционированного применения. Например, источник 2500 электропитания может стать неактивным, например, посредством прекращения приема, хранения и/или передачи энергии. Защита от несанкционированного применения может обеспечить надлежащую работу источника 2500 электропитания во время применения с хирургическим инструментом 10.
Как показано на ФИГ. 134 и 135, источник 2500 электропитания может включать в себя наружный кожух 2502, который может охватывать различные компоненты источника 2500 электропитания, такого как, например, аккумуляторная батарея 2510. Кожух 2502 может включать в себя первую оболочку 2504 и вторую оболочку 2506, которая может быть соединена с возможностью отсоединения с первой оболочкой 2504, как показано на ФИГ. 135. В некоторых примерах оболочки 2504 и 2506 могут быть образованы из термопластичного материала, такого как, например, поликарбонат. Альтернативно можно использовать другие материалы, имеющие соответствующие характеристики. Кроме того, оболочки 2504 и 2506 могут быть соединены друг с другом посредством одного или более способов прикрепления, таких как, например, склеивание, сварка, использование скрепляющих структур и/или винтов. В одном примере оболочки 2504 и 2506 могут быть присоединены друг к другу посредством зацепления по типу замкового соединения. В другом примере оболочки 2504 и 2506 могут быть присоединены друг к другу посредством крепежных элементов 2508, как показано на ФИГ. 135.
Как показано на ФИГ. 135-137, источник 2500 электропитания может включать в себя механизм 2512 отключения, который может приводить источник 2500 электропитания в нерабочее состояние при нарушении источника 2500 электропитания. Например, механизм 2512 отключения может приводить источник 2500 электропитания в нерабочее состояние при несанкционированном применении кожуха 2502. Как показано на ФИГ. 135-137, механизм 2512 отключения может содержать цепь 2514, которая может включать в себя разрываемый участок 2516 (см. ФИГ. 136). В некоторых примерах разрываемый участок 2516 может быть образован из проводящего материала, который можно легко разорвать. Как показано на ФИГ. 136, цепь 2514 может быть соединена с аккумуляторной батареей 2510 и может позволять току протекать до тех пор, пока разрываемый участок 2516 остается интактным. Разрыв разрываемого участка 2516, как показано на ФИГ. 137, может прерывать цепь 2514, таким образом прерывая поток проходящего через нее тока. В дополнение к вышесказанному, как показано на ФИГ. 135, цепь 2514 может быть расположена так, что разрываемый участок 2516 может разрываться при отделении друг от друга первой оболочки 2504 и второй оболочки 2506, что может приводить к неспособности источника 2500 электропитания получать, хранить и/или подавать электропитание на хирургический инструмент 10 без приложения значительных усилий на восстановление разорванной цепи 2514.
Как показано на ФИГ. 135, источник 2500 электропитания может содержать один или более элементов аккумулятора в зависимости от потребностей в токовой нагрузке инструмента 10. В различных аспектах источник 2500 электропитания может включать в себя аккумуляторную батарею, такую как, например, аккумуляторная батарея 2510, которая может включать в себя множество элементов аккумулятора, которые можно соединять друг с другом последовательно. Источник 2500 электропитания может быть сменным. В некоторых аспектах источник 2500 электропитания может содержать перезаряжаемый аккумулятор (например, на основе свинца, на основе никеля, на основе ионов лития и т. п.). Элементы аккумуляторной батареи могут представлять собой, например, 3-вольтные литиевые элементы аккумуляторной батареи, такие как элементы CR 123A аккумуляторной батареи, хотя в других вариантах осуществления могут применяться другие типы элементов аккумуляторной батареи (включая элементы аккумуляторной батареи с разными уровнями напряжения и/или разными химическими реакциями). Пользователь может отсоединить и удалить истощенный источник 2500 электропитания из хирургического инструмента 10 и присоединить на его место заряженный источник 2500 электропитания. Впоследствии истощенный источник 2500 электропитания можно зарядить и использовать повторно. Также предполагается, что источник 2500 электропитания может включать в себя, по меньшей мере, один одноразовый аккумулятор. В различных аспектах напряжение одноразового аккумулятора может находиться в диапазоне от около 9 вольт до около 30 вольт. Пользователь может отсоединить и удалить истощенный одноразовый источник 2500 электропитания и подключить новый одноразовый источник 2500 электропитания для электропитания хирургического инструмента 10.
Как описано выше, источник 2500 электропитания может включать в себя перезаряжаемые элементы аккумулятора и может быть, например, съемно размещен внутри участка 14 рукоятки корпуса 12 (см. ФИГ. 1). В таких обстоятельствах источник 2500 электропитания можно зарядить с использованием базы зарядного устройства, которая может содержать источник электропитания для зарядки источника 2500 электропитания. Механизм отключения, такой как, например, механизм 2512 отключения, можно использовать для предотвращения подзарядки источника 2500 электропитания посредством базы зарядного устройства при несанкционированном применении источника 2500 электропитания, как описано выше. Например, цепь 2514 может быть связана с аккумуляторной батареей 2510 и может быть выполнена с возможностью связи с базой зарядного устройства, чтобы позволять базе зарядного устройства подзаряжать аккумуляторную батарею 2510. Как описано выше, разрываемый участок 2516 (см. ФИГ. 135) может разрываться при отделении первой оболочки 2504 от второй оболочки 2506, таким образом прерывая поток тока через цепь 2514, что может предотвращать подзарядку аккумуляторной батареи 2510 от базы зарядного устройства. Это может быть преимуществом, препятствующим несанкционированному применению источника 2500 электропитания конечным пользователем, поскольку несанкционированное применение источника 2500 электропитания может приводить к невозможности его подзарядки для последующего применения с хирургическим инструментом 10.
Как показано на ФИГ. 138-141, источник 2500 электропитания может включать в себя блок хранения данных, такой, например, память 2552, которая может хранить данные, включая информацию об источнике 2500 электропитания, такую как, например, доступный полный заряд, число применений и/или рабочие характеристики. Кроме того, память 2552 может хранить данные о хирургическом инструменте 10, включая разнообразную информацию относительно работы хирургического инструмента 10 во время хирургического вмешательства, такую как, например, показания различных датчиков, число запусков, число использованных кассет и/или информация о получавших лечение пациентах. Память 2552 может включать в себя любые средства для хранения программного обеспечения, включая, без ограничений, ПЗУ (постоянное запоминающее устройство), ОЗУ (оперативное запоминающее устройство), ППЗУ (программируемое ПЗУ), ЭСППЗУ (электрически стираемое ППЗУ) и/или другие машиночитаемые носители.
В дополнение к вышесказанному, как показано на ФИГ. 138-141, источник 2500 электропитания может включать в себя портал доступа к данным, такой как, например, интерфейс 2550 ввода-вывода, для обеспечения доступа к данным, хранящимся в памяти 2552. Например, интерфейс 2550 ввода-вывода может позволять загрузку данных, хранящихся в памяти 2552 источника 2500 электропитания, на внешнее компьютерное устройство для оценки и анализа. В определенных обстоятельствах интерфейс 2550 ввода-вывода может быть проводным интерфейсом и может быть функционально связан с механизмом 2512 отключения, который может включать в себя разрывное соединение, которое может служить для предотвращения передачи данных через интерфейс 2550 ввода-вывода. Аналогично разрываемому участку 2516 механизма 2512 отключения разрывное соединение механизма 2554 отключения может быть расположено так, что оно может разрываться при разрыве кожуха 2502, как, например, при отделении друг от друга первой оболочки 2504 и второй оболочки 2506.
В дополнение к вышесказанному, как показано на ФИГ. 139-141, интерфейс 2550 ввода-вывода может включать в себя соединитель 2555, который может быть выполнен с возможностью приема соответствующего соединителя 2556 с внешнего компьютерного устройства, например, для обеспечения передачи данных между памятью 2552 и компьютерным устройством. Кроме того, соединитель 2554 может быть защищен посредством крышки, такой как, например, поворотная крышка 2559, которая может быть выполнена с возможностью перемещения между заблокированным положением (см. ФИГ. 139), в котором соединитель 2554 закрыт, и незаблокированным положением (см. ФИГ. 140), в котором соединитель 2554 открыт для приема соответствующего соединителя 2556. В одном примере для присоединения поворотной крышки 2559 к кожуху 2502 можно использовать винт 2558. В настоящем описании предполагаются другие средства для обратимого покрытия соединителя 2556. В дополнение к вышесказанному, в некоторых примерах соединители 2554 и 2556 могут включать в себя взаимодействие по типу ключа в замке, причем соединители 2554 и 2556 могут иметь, например, уникальные комплиментарные геометрические формы, предотвращающие прием соединителем 2554 других соединителей, чтобы предотвратить или, по меньшей мере, ограничить несанкционированный доступ к данным, хранящимся в памяти 2552. В некоторых примерах соединитель 2554 может быть расположен внутри кожуха 2502, как показано на ФИГ. 141, чтобы дополнительно ограничивать несанкционированный доступ к данным, хранящимся в памяти 2552. В таких обстоятельствах соединитель 2554 может быть доступен посредством отделения первой оболочки 2504 от второй оболочки 2506 кожуха 2502. Однако, как более подробно описано выше, механизм 2512 отключения может при разрыве кожуха 2502 приводить источник 2500 электропитания в нерабочее состояние, что может дополнительно препятствовать попыткам открытия соединителя 2554 для получения доступа к данным, хранящимся в памяти 2552.
Как показано на ФИГ. 142, источник 2500 электропитания может включать в себя процессор 2560, который может управлять данными, хранящимися в памяти 2552. Для защиты таких данных от несанкционированного доступа процессор 2560 может быть связан с механизмом 2562 определения разрыва. Например, процессор 2560 может быть связан с цепью 2514 и может быть выполнен с возможностью обнаружения разрыва разрываемого участка 2516. В одном примере механизм 2562 определения разрыва может включать в себя один или более датчиков, выполненных с возможностью обнаружения разрыва в кожухе 2502. В любом случае процессор 2560 может быть запрограммирован после обнаружения разрыва предотвращать несанкционированный доступ к данным, хранящимся в памяти 2552, например, посредством удаления или кодирования данных.
На ФИГ. 143-145 показан хирургический инструмент 2600. Хирургический инструмент 2600 во многих отношениях аналогичен хирургическому инструменту 10 (см. ФИГ. 1) и/или хирургическому инструменту 2100 (см. ФИГ. 146). Например, хирургический инструмент 2600 может включать в себя узел 2602 корпуса, который аналогичен узлу 2102 корпуса хирургического инструмента 2100 и/или корпусу 12 хирургического инструмента 10. Кроме того, хирургический инструмент 2600 может включать в себя источник 2500’ электропитания, который можно использовать для подачи электропитания на хирургический инструмент 2600 и который во многих отношениях аналогичен другим источникам электропитания, которые более подробно описаны в других разделах настоящего документа, таким как, например, источник 2500 электропитания (см. ФИГ. 134) и другие источники электропитания такого типа, который более подробно описан в публикации Zemlok ‘763, полностью включенной в настоящий документ путем ссылки. Кроме того, как показано на ФИГ. 143, источник 2500’ электропитания может включать в себя индикатор 2660 уровня заряда, который может быть выполнен с возможностью обеспечения пользователю обратной связи об уровне заряда источника 2500’ электропитания. Обратная связь может быть обеспечена, например, в звуковой и/или световой форме. Источник 2500’ электропитания может включать в себя один или более светодиодов. Процессор 2560 может быть, например, запрограммирован контролировать светодиоды для обеспечения пользователю обратной связи об уровне заряда источника 2500’ электропитания, который можно измерять, например, посредством измерителя заряда.
Как показано на ФИГ. 143-145, источник 2500’ электропитания может включать в себя первый светодиод 2662 и второй светодиод 2664. Процессор 2560 может быть связан со светодиодами 2662 и 2664 и может быть запрограммирован подсвечивать оба светодиода 2662 и 2664 после приема от измерителя заряда сигнала о полной зарядке источника электропитания. Кроме того, процессор 2560 может быть запрограммирован выключать оба светодиода 2662 и 2664 после приема от измерителя заряда сигнала о том, что источник электропитания полностью разряжен. Кроме того, процессор 2560 может быть запрограммирован подсвечивать только первый светодиод 2662, но не второй светодиод 2664, после приема от измерителя заряда сигнала о том, что источник электропитания достаточно заряжен для выполнения только одной полной работы хирургического инструмента 2600. В настоящем описании предполагаются другие средства для уведомления пользователя относительно уровня заряда источника 2500’ электропитания.
В некоторых вариантах осуществления различные компоненты хирургического инструмента 10 могут быть, например многоразовыми, и различные компоненты могут быть сменными. Кроме того, хирургический инструмент 10 можно, по меньшей мере, частично собрать, разобрать и/или повторно собрать. Например, хирургический инструмент 10 можно, по меньшей мере, частично разобрать и повторно собрать с использованием, например, многоразовых компонентов и сменных компонентов. Кроме того, между хирургическими вмешательствами хирургический инструмент 10 можн,о по меньшей мере, частично разобрать для очистки, дезинфекции и/или обработки для повторного применения. После этого хирургический инструмент 10 можно, например, повторно собрать. Как более подробно описано в настоящем документе, различные элементы, узлы и/или системы хирургического инструмента 10 могут облегчать его разборку и сборку. Например, на ФИГ. 146-148, показан хирургический инструмент 2100. Хирургический инструмент 2100 во многих отношениях аналогичен хирургическому инструменту 10 (см. ФИГ. 1). Например, хирургический инструмент 2100 может включать в себя узел 2102 корпуса который аналогичен корпусу 12 хирургического инструмента 10. Кроме того, узел 2102 корпуса может включать в себя несколько выполненных с возможностью отсоединения компонентов 2103, которые можно присоединять с возможностью отсоединения к корпусной детали 2104, такой как, например, рабочий узел 2106. Другие компоненты узла 2102 корпуса можно присоединять к корпусной детали 2104 с возможностью отсоединения. Например, узел 2102 корпуса может включать в себя сменный источник 2108 электропитания, который можно присоединять с возможностью отсоединения к участку 2110 рукоятки корпусной детали 2104. Источник 2108 электропитания во многих отношениях аналогичен другим источникам электропитания, более подробно описанным в других разделах настоящего документа, таким как, например, источник 200 электропитания (см. ФИГ. 1).
Как показано на ФИГ. 147, узел 2102 корпуса, или некоторые или все его компоненты, может быть многоразовым. Иными словами, узел 2102 корпуса или некоторые или все его компоненты могут использоваться во множестве хирургических вмешательств, причем между хирургическими вмешательствами может потребоваться очистка, дезинфекция и/или обработка для повторного применения узла 2102 корпуса. Способность обратимо разбирать узел 2102 корпуса или удалять некоторые или все его компоненты, такие как, например, рабочий узел 2106, простым и воспроизводимым способом может упрощать этапы очистки, дезинфекции и/или обработки для повторного применения узла 2012 корпуса и/или может уменьшать стоимость.
Как показано на ФИГ. 147, узел 2102 корпуса можно разобрать после хирургического вмешательства, а компоненты разобранного узла 2102 корпуса, такие как, например, корпусная деталь 2104, рабочий узел 2106 и/или источник 2110 электропитания, можно очистить, продезинфицировать и/или обработать для повторного применения каждый по отдельности или в комбинации с другими компонентами в зависимости от характеристик и внутренних частей каждого компонента. В некоторых примерах корпусная деталь 2104 может быть одноразовой. Иными словами, узел 2102 корпуса можно разобрать после хирургического вмешательства, а корпусную деталь 2104 можно заменить новой корпусной деталью 2104. Однако оставшиеся компоненты можно очистить, продезинфицировать и/или обработать для повторного применения, после чего прикрепить к новой корпусной детали 2104. Читателю станет понятно, что другие компоненты узла 2102 корпуса также могут быть одноразовыми и их можно заменять новыми подобными компонентами.
Как показано на ФИГ. 146-148, корпусная деталь 2104 может быть выполнена с возможностью обеспечения сборку и разборки узла 2102 корпуса простым, предсказуемым и воспроизводимым способом. Например, корпусная деталь 2104 может включать в себя первый участок 2112 защитного кожуха (см. ФИГ. 147) и второй участок 2114 защитного кожуха (см. ФИГ. 146), который может быть прикреплен с возможностью высвобождения к первому участку 2112 защитного кожуха. В одном примере участки 2112 и 2114 защитного кожуха могут включать в себя зацепление по типу замкового соединения. Участки 2112 и 2114 защитного кожуха могут быть выполнены с возможностью парного зацепления друг с другом. В одном примере участок 2112 защитного кожуха может включать в себя множество охватывающих элементов 2116 (см. ФИГ. 147), которые могут иметь цилиндрическую форму и быть выполнены с возможностью приема соответствующих входящих элементов (не показаны), размещенных на участке 2114 защитного кожуха, в зацеплении по типу замкового соединения при совместной сборке участков 2112 и 2114 защитного кожуха.
В дополнение к вышесказанному, рабочий узел 2106 может размещаться в первом участке 2112 защитного кожуха. Как показано на ФИГ. 147, второй участок 2114 защитного кожуха можно удалить для открытия рабочего узла 2106, размещенного в первом участке 2112 защитного кожуха, чтобы позволить пользователю удалить рабочий узел 2106 из корпусной детали 2104. Рабочий узел 2106, как показано на ФИГ. 147, может включать в себя двигатель 2118, который может генерировать вращательные движения для приведения в действие концевого эффектора (например, участка кассеты/упора загрузочного блока 20, изображенного на ФИГ. 2). Двигатель 2118 во многих отношениях аналогичен другим двигателям, более подробно описанным в других разделах настоящего документа, таким как, например, двигатель 100 (см. ФИГ. 1). Кроме того, рабочий узел 2106 может также включать в себя трансмиссионный узел 2120, который может быть функционально связан с двигателем 2118 и который во многих отношениях аналогичен другим трансмиссионным узлам, более подробно описанным в других разделах настоящего документа, таким как, например, узел 170 зубчатой передачи (см. ФИГ. 5). Кроме того, рабочий узел 2106 может также включать в себя узел 2122 пускового элемента, который может преобразовывать вращательные движения, создаваемые двигателем 2118, в осевые движения, которые могут передаваться на концевой эффектор через пусковой стержень 2124. Узел 2122 пускового элемента во многих отношениях аналогичен другим приводным узлам, более подробно описанным в других разделах настоящего документа, таким как, например, узел 82 пускового элемента.
Как показано на ФИГ. 147 и 148, первый участок 2112 защитного кожуха может включать в себя множество отсеков, выполненных с возможностью приема рабочего узла 2106 и расположенных на определенном расстоянии. Например, как показано на ФИГ. 147, участок 2112 защитного кожуха может включать в себя отсек 2126 для размещения двигателя, который может быть расположен на определенном расстоянии, чтобы вмещать двигатель 2118. В некоторых примерах отсек 2126 для размещения двигателя может быть выполнен с возможностью посадки двигателя 2118 в установленной конструкции, чтобы обеспечить точность сборки. Кроме того, отсек 2126 для размещения двигателя может включать в себя инструкции по сборке, которые могут быть, например, отлиты на стенке отсека 2126 для размещения двигателя, чтобы обеспечить правильность сборки. Например, боковые стенки отсека 2126 для размещения двигателя могут быть выполнены с возможностью плотного приема двигателя 2118. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать двигатель 2118 только в одном положении, т. е. в правильном положении.
Аналогично, как показано на ФИГ. 147, участок 2112 защитного кожуха может включать в себя отсек 2128 для размещения трансмиссионного узла, который может быть расположен на определенном расстоянии, чтобы вмещать трансмиссионный узел 2120. Кроме того, в некоторых примерах отсек 2128 для размещения трансмиссионного узла может быть выполнен с возможностью посадки трансмиссионного узла 2120 в установленной конструкции, чтобы обеспечить точность сборки. Например, боковые стенки отсека 2128 для размещения трансмиссионного узла могут быть выполнены с возможностью плотного приема трансмиссионного узла 2120. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать трансмиссионный узел 2120 только в одном положении, т. е. в правильном положении. Кроме того, отсек 2128 для размещения трансмиссионного узла может включать в себя инструкции по сборке, которые могут быть, например, отлиты на стенке отсека 2128 для размещения трансмиссионного узла, чтобы обеспечить правильность сборки. Аналогично, как показано на ФИГ. 147, участок 2112 защитного кожуха может включать в себя отсек 2130 для размещения узла пускового элемента, который может быть расположен на определенном расстоянии, чтобы вмещать узел 2122 пускового элемента. Кроме того, в некоторых примерах отсек 2130 для размещения узла пускового элемента может быть выполнен с возможностью посадки узла 2122 пускового элемента в установленной конструкции, чтобы обеспечить точность сборки. Например, боковые стенки отсека 2130 для размещения узла пускового элемента могут быть выполнены с возможностью плотного приема узла 2122 пускового элемента. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать узел 2122 пускового элемента только в одном положении, т. е. в правильном положении. Кроме того, отсек 2130 для размещения узла пускового элемента может включать в себя инструкции по сборке, которые могут быть, например, отлиты на стенке отсека 2130 для размещения узла пускового элемента, чтобы обеспечить правильность сборки. Читателю станет понятно, что внутри участка 2112 защитного кожуха могут быть предложены другие компоненты рабочего узла 2106 с отсеками для размещения с уникальным назначением. Читателю также станет понятно, что электрические контакты для компонентов рабочего узла 2106 также могут залегать в отсеках участка 2112 защитного кожуха так, что после правильной сборки между рабочим узлом 2106, другими компонентами узла 2102 корпуса, такими как, например, источник 2108 электропитания, и/или другими компонентами хирургического инструмента 2100 могут быть установлены электрические соединения.
В дополнение к вышесказанному, рабочий узел 2106 может быть связан с возможностью отсоединения с пусковым стержнем 2124, как показано на ФИГ. 147, что может позволять пользователю удалять и снова подключать рабочий узел 2106 как единое целое к хирургическому инструменту 2100 для упрощения разборки и повторной сборки рабочего узла 2106. В одном примере, как показано на ФИГ. 147, узел 2122 пускового элемента может включать в себя полый трубчатый дистальный участок 2132, который может включать в себя дистальное отверстие, выполненное с возможностью приема и блокировки с возможностью высвобождения проксимального участка 2134 пускового стержня 2124, например, в зацеплении по типу замкового соединения.
Как показано на ФИГ. 147 и 148, другие компоненты узла 2102 корпуса могут быть размещены в выделенных для них отсеках в участке 2112 защитного кожуха аналогично рабочему узлу 2106. Например, участок 2112 защитного кожуха может включать в себя отсек 2136 для размещения источника электропитания, который может быть расположен на определенном расстоянии, чтобы вмещать источник 2108 электропитания. Кроме того, в некоторых примерах отсек 2136 для размещения источника электропитания может быть выполнен с возможностью посадки источника 2108 электропитания в установленной конструкции, чтобы обеспечить точность сборки. Например, боковые стенки отсека 2136 для размещения источника электропитания могут быть выполнены с возможностью плотного приема источника 2108 электропитания. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать источник 2108 электропитания только в одном положении, т. е. в правильном положении. Кроме того, отсек 2136 для размещения источника электропитания может включать в себя инструкции по сборке, которые могут быть, например, отлиты на стенке отсека 2136 для размещения источника электропитания, чтобы обеспечить правильность сборки.
В дополнение к вышесказанному, как показано на ФИГ. 147 и 148, определенные механизмы пользовательского устройства ввода, такие как, например, пусковая кнопка 2138 и/или закрывающий переключатель 2140, можно также отсоединить от корпусной детали 2104, которая может включать в себя отсек 2142 для размещения пусковой кнопки, который может быть расположен на определенном расстоянии, чтобы вмещать пусковую кнопку 2138, и/или отсек 2144 для размещения закрывающего переключателя, который может быть расположен на определенном расстоянии, чтобы вмещать закрывающий переключатель 2140. Кроме того, в некоторых примерах отсек 2142 для размещения пусковой кнопки может быть выполнен с возможностью посадки пусковой кнопки 2138 в установленной конструкции, чтобы обеспечить точность сборки. Например, боковые стенки отсека 2142 для размещения пусковой кнопки могут быть выполнены с возможностью плотного приема пусковой кнопки 2138. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать пусковую кнопку 2138 только в одном положении, т. е. в правильном положении. Аналогично отсек 2144 для размещения закрывающего переключателя может быть выполнен с возможностью посадки закрывающего переключателя 2140 в установленной конструкции, чтобы обеспечить точность сборки. Например, боковые стенки отсека 2144 для размещения закрывающего переключателя могут быть выполнены с возможностью плотного приема закрывающего переключателя 2140. Кроме того, боковые стенки могут быть выполнены асимметрично, по меньшей мере, в некоторых отношениях, чтобы принимать закрывающий переключатель 2140 только в одном положении, т. е. в правильном положении. Кроме того, отсек 2142 для размещения пусковой кнопки и/или отсек 2144 для размещения закрывающего переключателя могут включать в себя инструкции по сборке, которые могут быть, например, отлиты на стенке отсека 2142 для размещения пусковой кнопки и/или отсека 2144 для размещения закрывающего переключателя, чтобы обеспечить правильность сборки.
Как показано на ФИГ. 147 и 148, в дополнение к отсекам для размещения, участок 2112 защитного кожуха может включать в себя крепежный (-ые) механизм (-ы) для присоединения некоторых или всех выполненных с возможностью отсоединения компонентов 2103 узла 2102 корпуса в их соответствующих отсеках, для обеспечения того, что выполненные с возможностью отсоединения компоненты 2103 остаются размещенными в их соответствующих отсеках. Такие крепежные механизмы могут включать в себя крепежные элементы, которые могут быть выполнены с возможностью перемещения между незаблокированной конфигурацией (см. ФИГ. 148) и заблокированной конфигурацией (см. ФИГ. 147), чтобы блокировать выполненные с возможностью отсоединения компоненты 2103 узла 2102 корпуса в их соответствующих отсеках в участке 2112 защитного кожуха. Читателю станет понятно, что для присоединения одного или более выполненных с возможностью отсоединения компонентов 2103 к участку 2112 защитного кожуха может использоваться один или множество крепежных элементов. Кроме того, крепежные механизмы могут также включать в себя защитные элементы, которые могут предотвращать перемещение крепежных элементов в заблокированную конфигурацию в случае неправильной сборки, чтобы обеспечить правильность сборки выполненных с возможностью отсоединения компонентов 2103 узла 2102 корпуса. Как показано в примере осуществления на ФИГ. 147, рабочий узел 2106 может быть присоединен к участку 2112 защитного кожуха посредством нескольких крепежных элементов, таких как, например, крепежный элемент 2148 двигателя, крепежный элемент 2150 трансмиссионного узла, и/или крепежный элемент 2152 узла пускового элемента. В некоторых примерах, как показано на ФИГ. 147, крепежный элемент 2154 источника электропитания, крепежный элемент 2156 пусковой кнопки и крепежный элемент 2158 закрывающего переключателя могут использоваться для присоединения источника 2108 электропитания, пусковой кнопки 2138 и закрывающего переключателя 2140 соответственно.
Крепежные элементы могут зажимать выполненные с возможностью отсоединения компоненты 2103 посредством перемещения из незаблокированной конфигурации (см. ФИГ. 148) в заблокированную конфигурацию (см. ФИГ. 147). Например, крепежный элемент 2148 двигателя может зажимать двигатель 2118 посредством перемещения из незаблокированной конфигурации (см. ФИГ. 148) в заблокированную конфигурацию (см. ФИГ. 147). В некоторых примерах некоторые или все из выполненных с возможностью отсоединения компонентов 2103 могут содержать направляющие, выполненные с возможностью приема крепежных элементов при их перемещении из незаблокированной конфигурации в заблокированную конфигурацию. Направляющие могут располагаться таким образом, что они могут быть совмещены для приема перемещающихся крепежных элементов только тогда, когда выполненные с возможностью отсоединения компоненты 2103 правильно размещены внутри их соответствующих отсеков в участке 2112 защитного кожуха. Например, при неправильном размещении двигателя 2118 в отсеке 2126 для размещения двигателя крепежный элемент 2148 двигателя может быть некорректно совмещен со своей направляющей, и при перемещении крепежного элемента 2148 двигателя из незаблокированной конфигурации в заблокированную конфигурацию крепежный элемент 2148 двигателя может не входить в направляющую и, например, может примыкать к наружной стенке двигателя 2118. В некоторых примерах крепежный элемент 2148 двигателя может быть расположен так, что он может предотвращать парное зацепление первого участка 2112 защитного кожуха со вторым участком 2114 защитного кожуха, если пользователь пытается собирать участки защитного кожуха 2112 и 2114 в то время, как крепежный элемент 2148 двигателя не находится в заблокированной конфигурации. Эта конструкция может уведомлять пользователя о необходимости повторной проверки собранных компонентов узла 2102 корпуса на правильность сборки.
Аналогично крепежному 2148 элементу двигателя крепежный элемент 2150 трансмиссионного узла может быть принят выделенной для него направляющей на трансмиссионном узле 2120, и крепежный элемент 2150 трансмиссионного узла может быть расположен так, что он совмещен со своей соответствующей направляющей только тогда, когда трансмиссионный узел 2120 правильно размещен в отсеке 2128 для размещения трансмиссионного узла. Кроме того, например, крепежный элемент 2152 узла пускового элемента может быть принят выделенной для него направляющей на узле 2122 пускового элемента, и крепежный элемент 2152 узла пускового элемента может быть расположен так, что он совмещен со своей соответствующей направляющей только тогда, когда узел 2122 пускового элемента правильно размещен в отсеке 2130 для размещения узла пускового элемента. Также аналогично крепежному элементу 2148 двигателя крепежный элемент 2150 трансмиссионного узла и/или крепежный элемент 2152 узла пускового элемента могут быть расположены так, что любой из них может предотвращать парное зацепление первого участка 2112 защитного кожуха со вторым участком 2114 защитного кожуха, если пользователь пытается собирать участки защитного кожуха 2112 и 2114 в то время, как крепежный элемент 2150 трансмиссионного узла и/или крепежный элемент 2152 узла пускового элемента не находятся в заблокированной конфигурации. Как описано выше, некоторые из выполненных с возможностью отсоединения компонентов 2103 можно отсоединить и снова совместно прикрепить к элементу 2112 защитного кожуха в виде узла, причем их можно присоединить посредством множества крепежных элементов. Например, рабочий узел 2106 можно присоединить к участку 2112 защитного кожуха крепежным элементом 2148 двигателя, крепежным элементом 2150 трансмиссионного узла и/или крепежным элементом 2152 узла пускового элемента, как показано на ФИГ. 147. Такая конструкция может обеспечивать дополнительный уровень страхования правильной сборки, поскольку неудача правильной сборки любого одного из компонентов рабочего узла 2106 может предотвращать достижение соответствующим крепежным элементом заблокированной конфигурации, что может предотвращать парное зацепление первого участка 2112 защитного кожуха со вторым участком 2114 защитного кожуха, если пользователь пытается собирать участки 2112 и 2114 защитного кожуха в то время, как, по меньшей мере, один из крепежных элементов остается коротким для заблокированной конфигурации.
Как показано на ФИГ. 147 и 148, некоторые или все из крепежных элементов могут быть прикреплены с возможностью поворота к первому участку 2112 защитного кожуха и могут быть выполнены с возможностью перемещения относительно первого участка 2112 защитного кожуха из незаблокированной конфигурации (см. ФИГ. 148) в заблокированную конфигурацию (см. ФИГ. 147) и наоборот. В некоторых примерах второй участок 2114 защитного кожуха может включать в себя выступающие крепежные элементы (не показаны), выполненные с возможностью приема внутрь соответствующего принимающего элемента (не показан) в выполненных с возможностью отсоединения компонентах 2103, размещенных в первом участке 2112 защитного кожуха, когда участки защитного кожуха 2112 и 2114 совмещены для парного зацепления во время сборки узла 2102 корпуса. Выступающие крепежные элементы могут гарантировать, что выполненные с возможностью отсоединения компоненты 2103 остаются присоединенными к первому участку 2112 защитного кожуха. Кроме того, выступающие крепежные элементы могут предотвращать парное зацепление первого участка 2112 защитного кожуха и второго участка 2114 защитного кожуха, если пользователь пытается собирать участки защитного кожуха 2112 и 2114 в то время, как выступающие крепежные элементы не совмещены должным образом с их соответствующими принимающими элементами, например, из-за неверной сборки выполненных с возможностью отсоединения компонентов 2103, что может уведомлять пользователя о необходимости повторной проверки сборки выполненных с возможностью отсоединения компонентов 2103 узла 2102 корпуса на правильность сборки. Читателю станет понятно, что положения выступающих крепежных элементов и их соответствующих принимающих элементов могут быть изменены на противоположные так, что выступающие крепежные элементы могут быть выполнены с возможностью выступать из выполненных с возможностью отсоединения компонентов 2103 и приниматься в соответствующий принимающий элемент на втором участке 2114 защитного кожуха. В любом случае выступающие крепежные элементы и их соответствующие принимающие элементы могут быть прикреплены с возможностью высвобождения друг к другу, например, в зацеплении по типу замкового соединения. В настоящем описании предполагаются и другие механизмы зацепления.
В дополнение к вышесказанному, некоторые или все из выполненных с возможностью отсоединения компонентов 2103 могут включать в себя кулачковые поверхности, выполненные с возможностью приема крепежных элементов первого участка 2112 защитного кожуха по мере их перемещения из незаблокированной конфигурации (см. ФИГ. 148) в заблокированную конфигурацию (см. ФИГ. 147). Кулачковые поверхности могут быть расположены на наружной поверхности некоторых или всех выполненных с возможностью отсоединения компонентов 2103 и могут позволять соответствующим крепежным элементам прикладывать давление к выполненным с возможностью отсоединения компонентам 2103, находящимся в заблокированной конфигурации. Например, двигатель 2118 может включать в себя кулачковую поверхность вдоль своей направляющей. При перемещении крепежного элемента 2148 двигателя из незаблокированной конфигурации (см. ФИГ. 148) в заблокированную конфигурацию (см. ФИГ. 147) крепежный элемент 2148 двигателя может двигаться вдоль кулачковой поверхности на двигателе 2118, что может позволять крепежному элементу 2148 двигателя прикладывать возрастающее давление к двигателю 2118, причем максимальное давление, например, прикладывается в заблокированной конфигурации. Прикладываемое к двигателю 2118 давление может способствовать закреплению двигателя в отсеке 2126 для размещения двигателя.
Как описано выше, концевой эффектор может включать в себя пусковой элемент, который можно выдвигать дистально для сшивания ткани скобками и/или разрезания ткани. Как показано на ФИГ. 155, концевой эффектор 11260 может содержать первую браншу, включающую в себя упор 11262, и вторую браншу, включающую в себя кассету 11264 со скобками. Концевой эффектор 11260 может дополнительно содержать, во-первых, корпус и/или каркас 11261, проходящий проксимально от упора 11262 и кассеты 11264 со скобками, во-вторых, пусковой элемент 11266, который может перемещаться относительно корпуса 11261, упора 11262 и кассеты 11264. Концевой эффектор 11260 может дополнительно содержать шарнирное сочленение 11230, выполненное с возможностью обеспечения шарнирного поворота упора 11262 и кассеты 11264 посредством привода 11268 шарнирного поворота. В процессе применения концевой эффектор 11260 может быть собран на стволе 11240 хирургического инструмента, например, так, чтобы, во-первых, корпус 11261 концевого эффектора был связан с корпусом 11241 ствола, выполненным с возможностью закрепления корпуса 11261 концевого эффектора, во-вторых, пусковой элемент 11266 концевого эффектора связан с исполнительным механизмом 11246 пуска ствола, выполненным с возможностью выдвижения и втягивания пускового элемента 11266 концевого эффектора, и/или, в-третьих, привод 11268 шарнирного поворота концевого эффектора связан с исполнительным механизмом 11248 шарнирного поворота ствола, выполненным с возможностью выдвижения и втягивания привода 11268 шарнирного поворота концевого эффектора. В процессе применения пусковой элемент 11266 может выдвигаться дистально для перемещения упора 11262 из открытого положения, в котором ткань может быть расположена между упором 11262 и кассетой 11264, в закрытое положение, в котором упор 11262 прижимает ткань к кассете 11264. В различных обстоятельствах пусковой элемент 11266 может включать в себя первый элемент зацепления, выполненный с возможностью вхождения в зацепление с первой браншей, и второй элемент зацепления, выполненный с возможностью вхождения в зацепление со второй браншей при выдвижении пускового элемента 11266 дистально так, что упор 11262 может поворачиваться к кассете 11264 со скобками посредством действия элементов зацепления. Чтобы повторно открыть концевой эффектор и позволить упору 11262 вернуться в его открытое положение, необходимо, чтобы пусковой элемент 11266 был втянут в достаточной мере. В различных обстоятельствах пусковой элемент 11266 может застрять в положении, по меньшей мере, частичного запуска, и, в результате, невозможным является повторное открытие упора 11262, таким образом затрудняется удаление хирургического инструмента из хирургического поля.
Как показано на ФИГ. 156-161, концевой эффектор, такой как, например, концевой эффектор 11360, может включать в себя пусковой элемент, который может обеспечивать повторное открытие упора 11262 концевого эффектора 11360, даже если пусковой элемент концевого эффектора 11360 застрял в положении, по меньшей мере, частичного запуска. Более конкретно, концевой эффектор 11360 может включать в себя пусковой элемент 11366, содержащий разделимые участки 11366a и 11366b, которые могут быть выполнены с возможностью обеспечения в различных случаях относительного перемещения между упором 11262 и кассетой 11264. Как показано преимущественно на ФИГ. 157 и 158, разделимые участки 11366a и 11366b, могут удерживаться вместе посредством фиксирующего элемента 11390, когда фиксирующий элемент 11390 находится в заблокированном состоянии, как показано на ФИГ. 158. Соответственно, когда фиксирующий элемент 11390 находится в незаблокированном состоянии, разделимые участки 11366a и 11366b могут перемещаться относительно друг друга. Разделимый участок 11366a пускового элемента 11366 может содержать первый боковой участок 11363a, второй боковой участок 11367a и участок 11365a режущего элемента, расположенный между боковыми участками 11363a и 11367a. В различных обстоятельствах боковые участки 11363a и 11367a могут удерживаться с участком 11365a режущего элемента посредством одного или более штифтов, не показанных на ФИГ. 157 и 158, проходящих через образованные в нем отверстия 11396a. Разделимый участок 11366b пускового элемента 11366 может содержать первый боковой участок 11363b, второй боковой участок 11367b и участок 11365b режущего элемента, расположенный между боковыми участками 11363b и 11367b. В различных обстоятельствах боковые участки 11363b и 11367b могут удерживаться с участком 11365b режущего элемента посредством, по меньшей мере, одного удерживающего элемента, не показанного на ФИГ. 157 и 158, зацепленного с проходящей от него ножкой 11396b. Как станет понятно читателю, вышеупомянутые удерживающие штифты удерживают вместе различные компоненты разделимого участка 11363a, в то время как вышеупомянутый удерживающий элемент удерживает вместе различные компоненты разделимого участка 11363b. Как также станет понятно читателю, фиксирующий элемент 11390, когда он находится в его заблокированном положении, удерживает вместе разделимые участки 11363a и 11363b. В различных случаях, как показано преимущественно на ФИГ. 158, фиксирующий элемент 11390 может включать в себя первый фиксирующий элемент 11397a, выполненный с возможностью вхождения в зацепление с первым фиксирующим участком 11361a первого участка 11365a режущего элемента, и, кроме того, второй фиксирующий элемент 11397b, выполненный с возможностью вхождения в зацепление со вторым фиксирующим участком 11361b второго участка 11365b режущего элемента. Первый фиксирующий участок 11361a и второй фиксирующий участок 11361b могут быть выполнены с возможностью совместного и высвобождаемого удержания вместе участков 11365a и 11365b режущего элемента. В различных случаях фиксирующие участки 11397a, 11397b могут удерживать вместе участки 11365a и 11365b режущего элемента так, что режущие поверхности 11395a и 11395b участков 11365a и 11365b режущего элемента соответственно формируют непрерывную или, по меньшей мере, по существу непрерывную режущую поверхность. Как показано на ФИГ. 158, фиксирующие участки 11397a, 11397b фиксирующего элемента 11390 могут быть выполнены с возможностью совместного вхождения в зацепление и удержания ключей 11361a и 11361b участков 11365a и 11365b режущего элемента соответственно. В различных случаях между фиксирующими участками 11397a, 11397b может быть сформировано углубление 11398, выполненное с возможностью приема ключей 11361a и 11361b, когда фиксирующий элемент 11390 находится в его заблокированном положении. При вытягивании фиксирующего элемента 11390 проксимально фиксирующие участки 11397a и 11397b могут высвобождать ключи 11361a и 11361b. В этот момент фиксирующий элемент 11390 может больше не удерживать вместе участки 11365a и 11365b режущего элемента. Таким образом, в таких обстоятельствах разделимые участки 11366a и 11366b могут перемещаться относительно друг друга. Например, разделимый участок 11366a может перемещаться с браншей 11262 при повторном открытии бранши 11262, и, соответственно, разделимый участок 11366b может оставаться с кассетой 11264. С учетом указанного выше, фиксирующий элемент 11390 можно вытянуть проксимально, чтобы высвободить разделимые участки 11366a и 11366b, если, например, пусковой элемент 11366 застрял в положении, по меньшей мере, частичного запуска.
Как описано выше, фиксирующий элемент 11390 можно вытянуть проксимально, чтобы высвободить разделимые участки 11366a и 11366b пускового элемента 11366. Как показано на ФИГ. 159, фиксирующий элемент 11390 можно вытянуть проксимально и/или вытолкнуть дистально посредством запорной планки 11391. Запорная планка 11391 может быть расположена внутри концевого эффектора 11360 и может включать в себя проксимальный конец 11392 и дистальный конец 11393. Дистальный конец 11393 запорной планки 11391 может входить в зацепление с фиксирующим элементом 11390. Более конкретно, по меньшей мере, в одном варианте осуществления дистальный конец 11393 может включать в себя проходящий из него выступ, который может быть расположен с возможностью скольжения внутри удлиненного паза 11399 образованного в фиксирующем элементе 11390. Для того чтобы вытянуть фиксирующий элемент 11390 проксимально, можно тянуть запорную планку 11391 проксимально до тех пор, пока выступ не вступит в контакт с проксимальным концом 11394 удлиненного паза 11399, причем перемещение запорной планки 11391 может передаваться на фиксирующий элемент 11390. Соответственно, выступ может быть выполнен с возможностью контакта с дистальным концом 11395 удлиненного паза 11399 для выталкивания фиксирующего элемента 11390 дистально. Как станет понятно читателю, как показано на ФИГ. 156, пусковой элемент 11366 может включать в себя один или более образованных в нем продольных пазов 11369, которые могут быть выполнены с возможностью обеспечения прохождения через них выступа запорной планки и вхождения в зацепление с фиксирующим элементом 11390, как описано выше.
В дополнение к вышесказанному, как показано преимущественно на ФИГ. 156 и 160, проксимальный конец 11392 запорной планки 11391 может содержать участок крепления, выполненный с возможностью вхождения в зацепление с исполнительным механизмом 11348 фиксации ствола 11340 хирургического инструмента. Как показано преимущественно на ФИГ. 160, исполнительный механизм 11348 фиксации может содержать дистальный конец 11349, включающий в себя вырез, который, например, может быть выполнен с возможностью приема проксимального конца 11392 запорной планки 11391. Исполнительный механизм 11348 фиксации может дополнительно содержать проксимальный конец 11347, который пользователь хирургического инструмента может тянуть проксимально и/или толкать дистально, чтобы перемещать исполнительный механизм 11348 фиксации и запорную планку 11391 проксимально и/или дистально соответственно. В процессе применения проксимальный конец 11392 запорной планки 11391 можно собрать на дистальном конце 11349 исполнительного механизма 11348 фиксации, когда концевой эффектор 11360 собран на стволе 11340.
Как описано выше, двигатель может использоваться для того, чтобы выдвигать и/или втягивать пусковой элемент для размещения скобок из концевого эффектора и/или разрезания ткани, захваченной внутри концевого эффектора. В различных случаях двигатель может включать в себя вращающийся приводной вал, поворот которого может быть преобразован в поступательное перемещение и передан на пусковой элемент, например, такой как режущий элемент и/или приводной механизм для скобок. По меньшей мере, в одном таком случае вращающийся приводной вал может включать в себя резьбовый участок, который соединен резьбовым соединением с манжетой, включающей в себя сформированное в ней резьбовое отверстие, причем в процессе применения поворот манжеты может быть ограничен так, что поворот приводного вала выдвигает манжету дистально и/или втягивает манжету проксимально, в зависимости от направления поворота приводного вала. В некоторых случаях пусковой элемент может застрять, и/или на него иным способом может действовать усилие или крутящий момент, которые превышают желаемый или заданный максимальный уровень силы или крутящего момента. Как показано на ФИГ. 162-167, узел 12000 двигателя может включать в себя двигатель 12010, ствол 12020 и узел 12030 муфты скольжения, причем узел 12030 муфты скольжения может ограничивать усилие или крутящий момент, который двигатель 12010 может передавать на ствол 12020. В различных случаях, как показано преимущественно на ФИГ. 162 и 163, узел 12030 муфты скольжения может передавать крутящий момент между вращающимся выходным элементом 12012 привода двигателя 12010 и стволом 12020. Как показано на ФИГ. 165-167, выходной элемент 12012 привода может включать в себя по существу круговой участок 12011 наружного профиля и переходную поверхность 12014, которая в различных случаях может быть плоской или, по меньшей мере, по существу плоской. Наружный профиль выходного элемента 12012 привода может дополнительно включать в себя первое приводное плечо 12016, сформированное между круговым участком 12011 профиля и плоской поверхностью 12014, и, кроме того, второе приводное плечо 12018, сформированное между противоположным концом плоской поверхности 12014 и круговым участком 12011 профиля.
Как показано на ФИГ. 165-167, узел 12030 муфты скольжения может включать в себя приводной элемент 12034, смещенный в зацепление с выходным элементом 12012 привода смещающим элементом или пружиной 12036. Приводной элемент 12034 может быть, по меньшей мере, частично расположен внутри удерживающего паза, сформированного в корпусе 12037 узла 12030 муфты скольжения так, что перемещение приводного элемента 12034 относительно корпуса 12037 может быть определено вдоль оси. Как станет понятно читателю, корпус 12037 узла муфты скольжения может быть установлен на ствол 12020 так, что поворот корпуса 12037 и ствола 12020 происходит синхронно. Как также станет понятно читателю, по меньшей мере, при определенных обстоятельствах приводной элемент 12034 может передавать вращательное движение выходного элемента 12012 привода на корпус 12037. Более конкретно, при повороте выходного элемента 12012 привода в первом направлении, как указано стрелкой 12017, для выдвижения пускового элемента дистально выходной элемент 12012 привода может поворачиваться относительно приводного элемента 12034 до тех пор, пока первое приводное плечо 12016 не вступит в контакт с приводным элементом 12034. Как станет понятно читателю, первое приводное плечо 12016 может оставаться в контакте с приводным элементом 12034 до тех пор, пока смещающий элемент 12036 способен сопротивляться или, по меньшей мере, в достаточной степени сопротивляться радиальному перемещению приводного элемента 12034 наружу. До тех пор пока приводной элемент 12034 находится в контакте с первым приводным плечом 12016, двигатель 12010 может поворачивать ствол 12020 в направлении, в котором пусковой элемент выдвигается дистально. В различных случаях двигатель 12010 может прикладывать к выходному элементу 12012 привода крутящий момент, который является достаточно большим, чтобы смещать приводной элемент 12034 радиально наружу так, что первое приводное плечо 12016 выходного элемента 12012 привода скользит под действием приводного элемента 12034, в результате чего выходной элемент 12012 привода поворачивается относительно приводного элемента 12034, корпуса 12037 муфты скольжения и ствола 12020. Иными словами, приводной элемент 12034 может отклоняться и функционально высвобождаться из двигателя 12010 при приложении к выходному элементу 12012 привода крутящего момента, превышающего заданное или максимальное значение крутящего момента. При снижении значения крутящего момента, прикладываемого к выходному элементу 12012 привода, ниже этого заданного или максимального значения крутящего момента, приводной элемент 12034 может повторно входить в зацепление с первым приводным плечом 12016, в результате чего ствол 12020 может быть функционально повторно зацеплен с двигателем 12010 так, что ствол 12020 поворачивается выходным элементом 12012 привода двигателя 12010.
В дополнение к вышесказанному, при повороте выходного элемента 12012 привода во втором направлении, как указано стрелкой 12019, для втягивания пускового элемента проксимально выходной элемент 12012 привода может поворачиваться относительно приводного элемента 12034 до тех пор, пока второе приводное плечо 12018 не вступит в контакт с приводным элементом 12034. Как станет понятно читателю, второе приводное плечо 12018 может оставаться в контакте с приводным элементом 12034 до тех пор, пока смещающий элемент 12036 способен сопротивляться или, по меньшей мере, в достаточной степени сопротивляться радиальному перемещению приводного элемента 12034 наружу. До тех пор пока приводной элемент 12034 находится в контакте со вторым приводным плечом 12018, двигатель 12010 может поворачивать ствол 12020 в направлении, которое вызывает втягивание пускового элемента проксимально. В различных случаях двигатель 12010 может прикладывать к выходному элементу 12012 привода крутящий момент, который является достаточно большим, чтобы смещать приводной элемент 12034 радиально наружу так, что второе приводное плечо 12018 выходного элемента 12012 привода скользит под действием приводного элемента 12034, в результате чего выходной элемент 12012 привода поворачивается относительно приводного элемента 12034, корпуса 12037 муфты скольжения и ствола 12020. Иными словами, приводной элемент 12034 может отклоняться и функционально высвобождаться из двигателя 12010 при приложении к выходному элементу 12012 привода крутящего момента, превышающего заданное или максимальное значение крутящего момента. При снижении значения крутящего момента, прикладываемого к выходному элементу 12012 привода, ниже этого заданного или максимального значения крутящего момента, приводной элемент 12034 может повторно входить в зацепление со вторым приводным плечом 12018, в результате чего ствол 12020 может быть функционально повторно зацеплен с двигателем 12010 так, что ствол 12020 поворачивается выходным элементом 12012 привода двигателя 12010.
В различных случаях, в дополнение к вышесказанному, первое приводное плечо 12016 и второе приводное плечо 12018 могут иметь одинаковую конфигурацию. В некоторых случаях первое приводное плечо 12016 может быть задано первым радиусом кривизны, а второе приводное плечо 12018 может быть задано вторым радиусом кривизны. В некоторых случаях первый радиус кривизны может быть таким же, как второй радиус кривизны. В таких случаях максимальный (или скользящий) крутящий момент, который двигатель 12010 может прикладывать при повороте выходного элемента 12012 привода в первом направлении 12017, может быть таким же или по существу таким же, как максимальный (или скользящий) крутящий момент, который двигатель 12010 может прикладывать при повороте выходного элемента 12012 привода во втором направлении 12019. В некоторых случаях первый радиус кривизны может отличаться от второго радиуса кривизны. В таких случаях максимальный (или скользящий) крутящий момент, который двигатель 12010 может прикладывать при повороте выходного элемента 12012 привода в первом направлении 12017, может отличаться от максимального (или скользящего) крутящего момента, который двигатель 12010 может прикладывать при повороте выходного элемента 12012 привода во втором направлении 12019. По меньшей мере, в одном таком случае первый радиус кривизны может быть больше второго радиуса кривизны, в результате, максимальный (или скользящий) крутящий момент в первом направлении 12017 может быть меньше максимального (или скользящего) крутящего момента во втором направлении 12019. Иными словами, двигатель 12010 может прикладывать к стволу 12020 больший крутящий момент при втягивании пускового элемента, чем при выдвижении пускового элемента. Такие случаи могут быть преимущественными, когда желательно втянуть пусковой элемент так, чтобы, например, концевой эффектор хирургического инструмента можно быть повторно открыть и освободить от ткани. По меньшей мере, в одном случае первый радиус кривизны может быть меньше второго радиуса кривизны, в результате, максимальный (или скользящий) крутящий момент в первом направлении 12017 может быть больше максимального (или скользящего) крутящего момента во втором направлении 12019. Иными словами, двигатель 12010 может прикладывать к стволу 12020 больший крутящий момент при выдвижении пускового элемента, чем при втягивании пускового элемента.
В дополнение к вышесказанному, как показано преимущественно на ФИГ. 163 и 164, смещающий элемент 12036 может упруго поддерживаться пружинным кольцом 12032, расположенным внутри кольцевого канала 12031, сформированного в корпусе 12037 муфты скольжения. В таких случаях пружинное кольцо 12032 и смещающий элемент 12036 могут действовать совместно, чтобы прикладывать направленное радиально внутрь смещающее усилие и/или сопротивляться перемещению приводного элемента 12034 радиально наружу. Пружинное кольцо 12032 в различных случаях может содержать кольцевой корпус, включающий в себя первый свободный конец 12033 и второй свободный конец 12034, причем кольцевой корпус может упруго расширяться, когда к нему прикладывается описанное выше усилие в направлении радиально наружу, и упруго сжиматься, когда это усилие в направлении радиально наружу прекращается или уменьшается. В таких случаях первый свободный конец 12033 пружинного кольца 12032 может перемещаться относительно второго свободного конца 12034.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью применения множество раз. Однако в любом случае устройство можно восстановить для повторного применения после по меньшей мере одного применения. Восстановление может включать любую комбинацию стадий разборки устройства, с последующей очисткой или заменой конкретных частей, и дальнейшей сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно собрать вновь для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать самые разные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Предпочтительно описанный здесь предмет изобретения будет проходить обработку перед проведением хирургической операции. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и инструмент затем помещают в поле излучения, которое способно проникнуть в контейнер, такое как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение убивает бактерии на инструменте и в контейнере. Стерилизованный инструмент может затем храниться в стерильном контейнере. Запечатанный контейнер сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в какой включенный материал не противоречит существующим определениям, положениям и другому материалу описания, представленным в настоящем описании. Таким образом, в необходимой степени раскрытие, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Хотя настоящее изобретение описано как имеющее примеры конфигураций, настоящее изобретение можно дополнительно модифицировать в пределах сущности и объема описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или адаптации изобретения с применением его общих принципов. Кроме того, предполагается, что настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области, к которой относится настоящее изобретение.

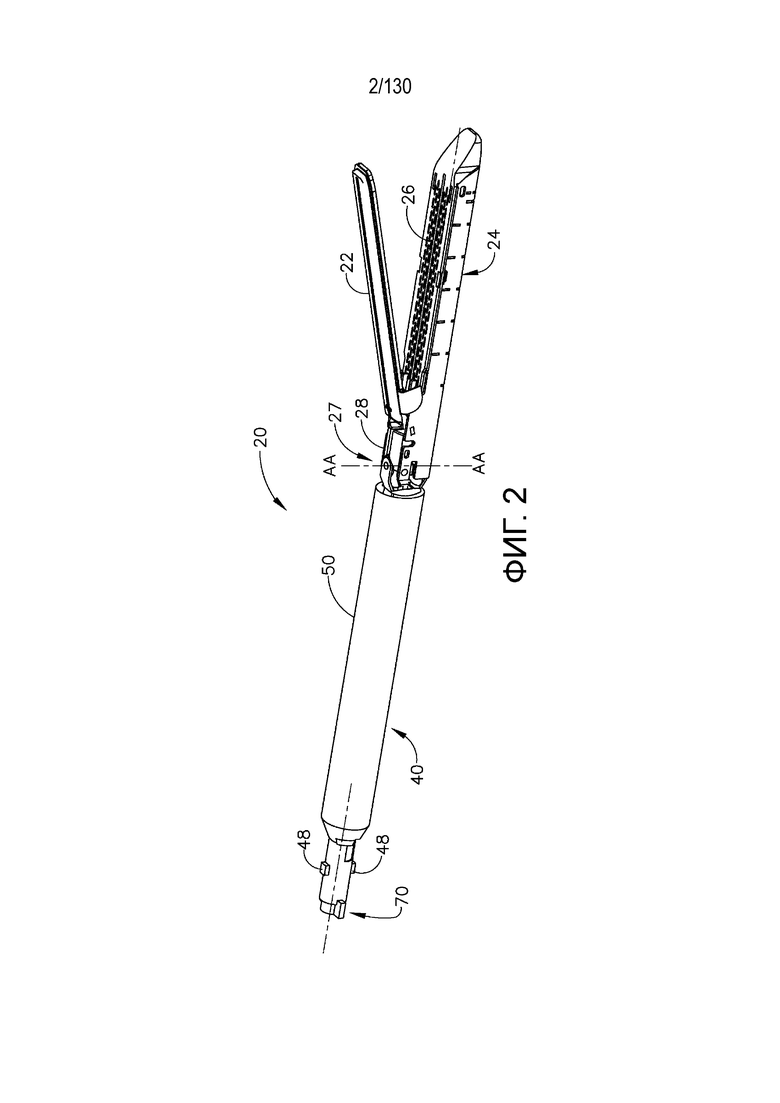
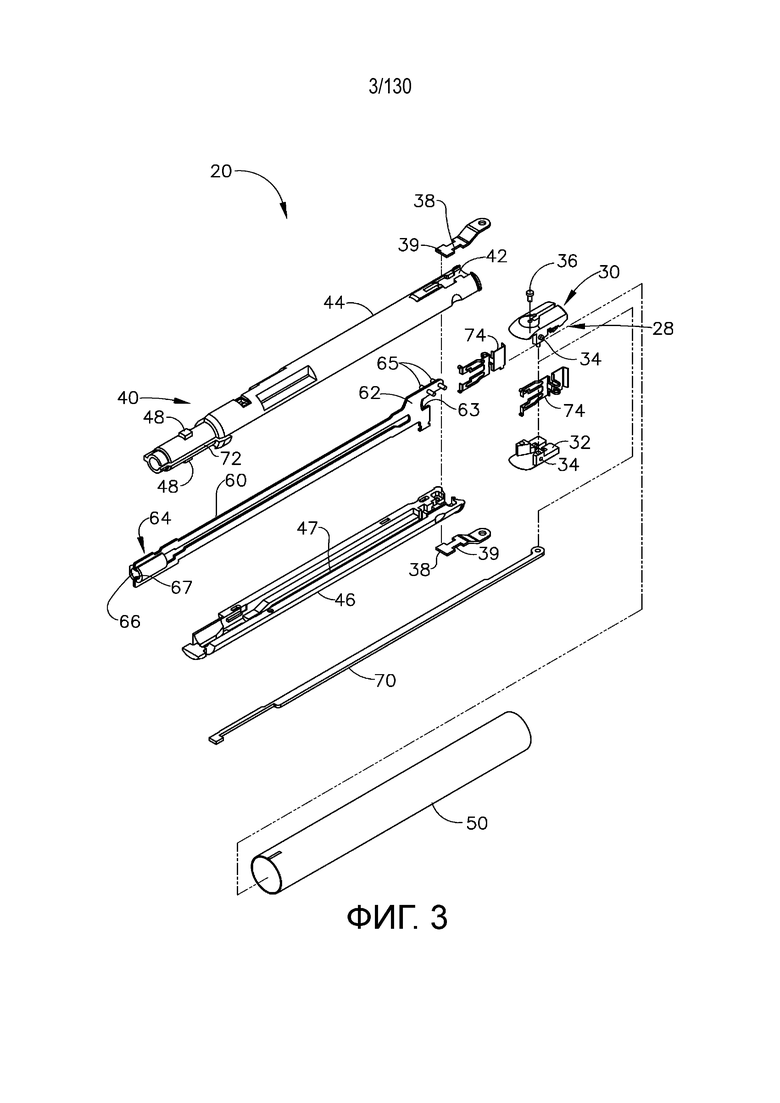

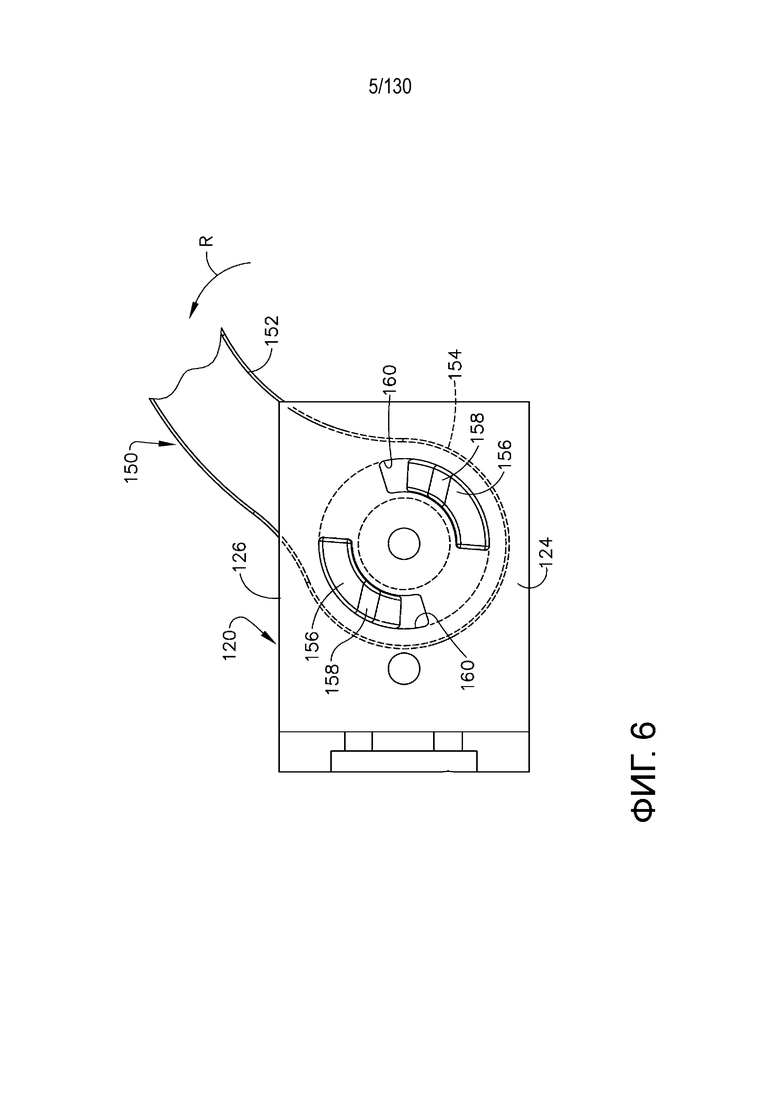

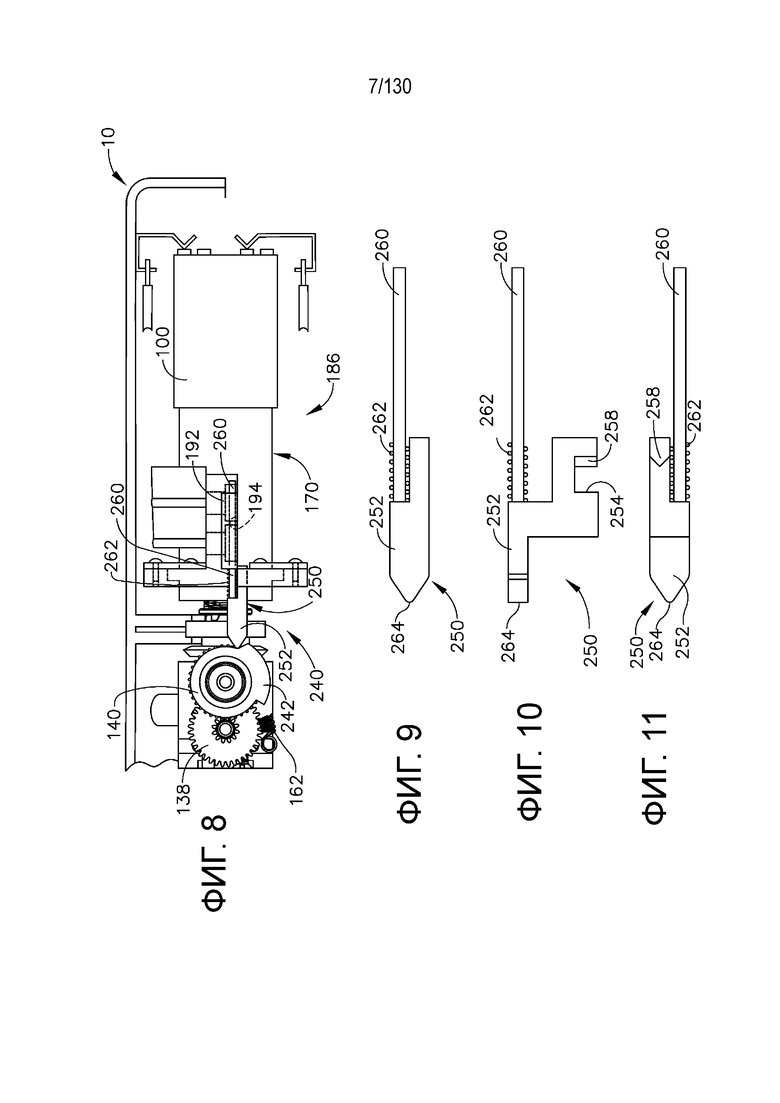
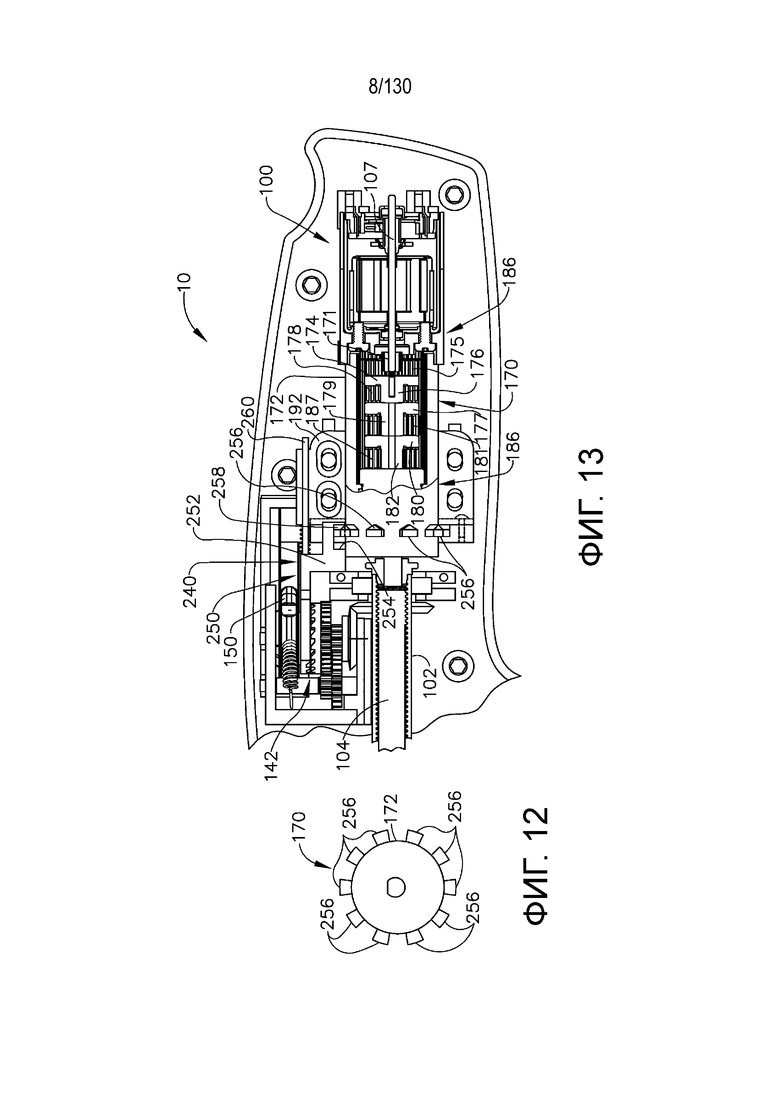
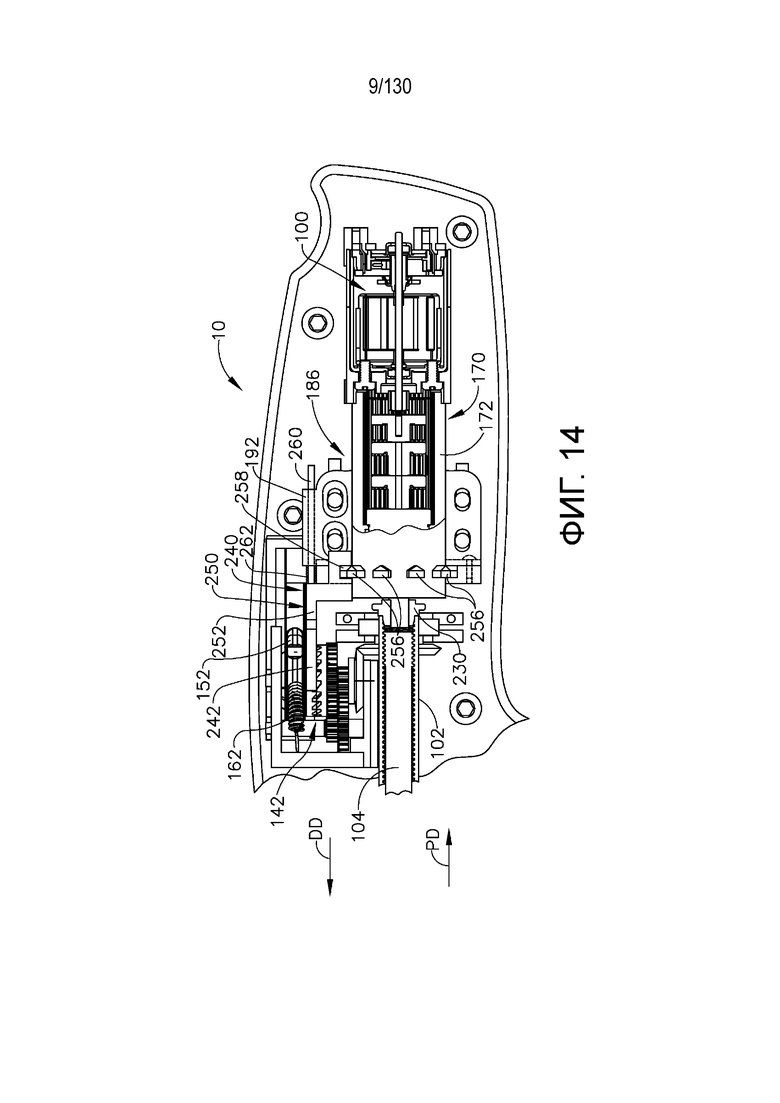
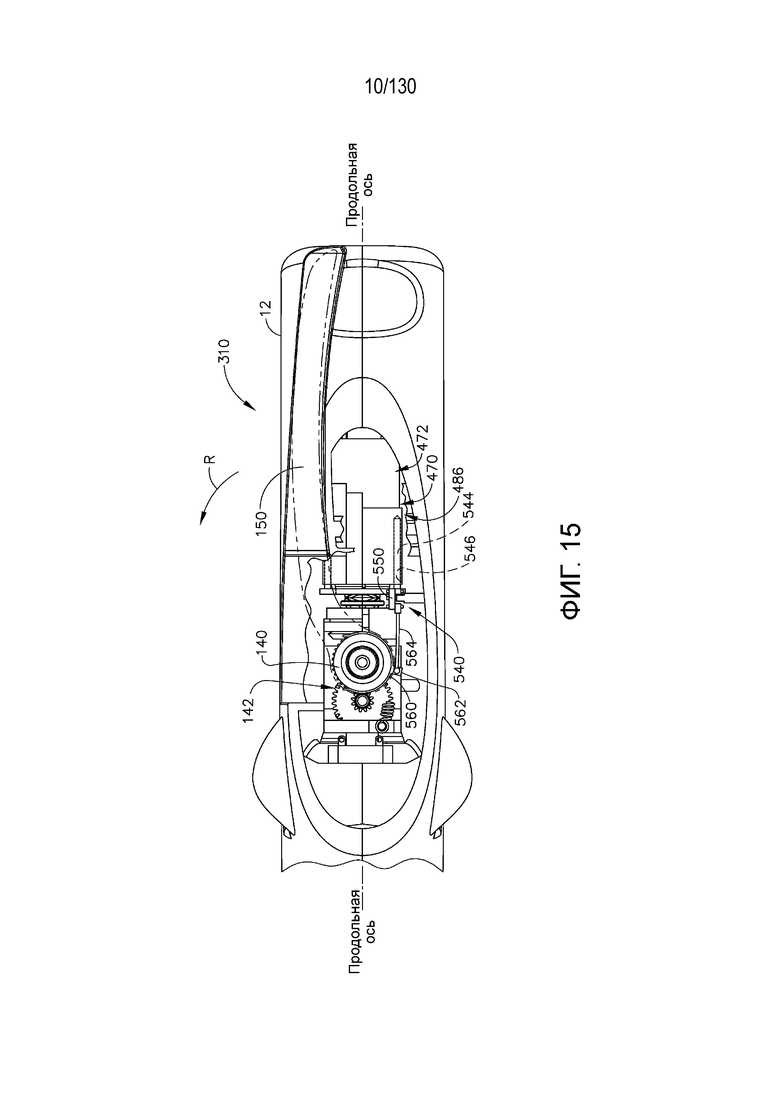
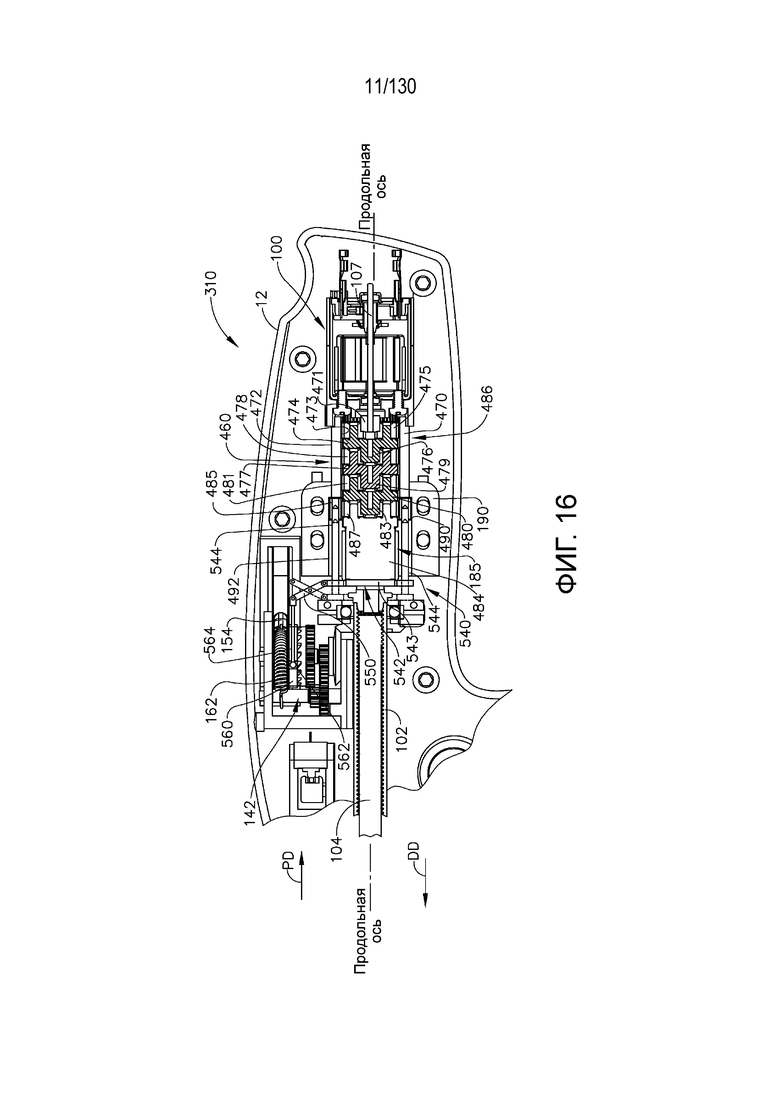
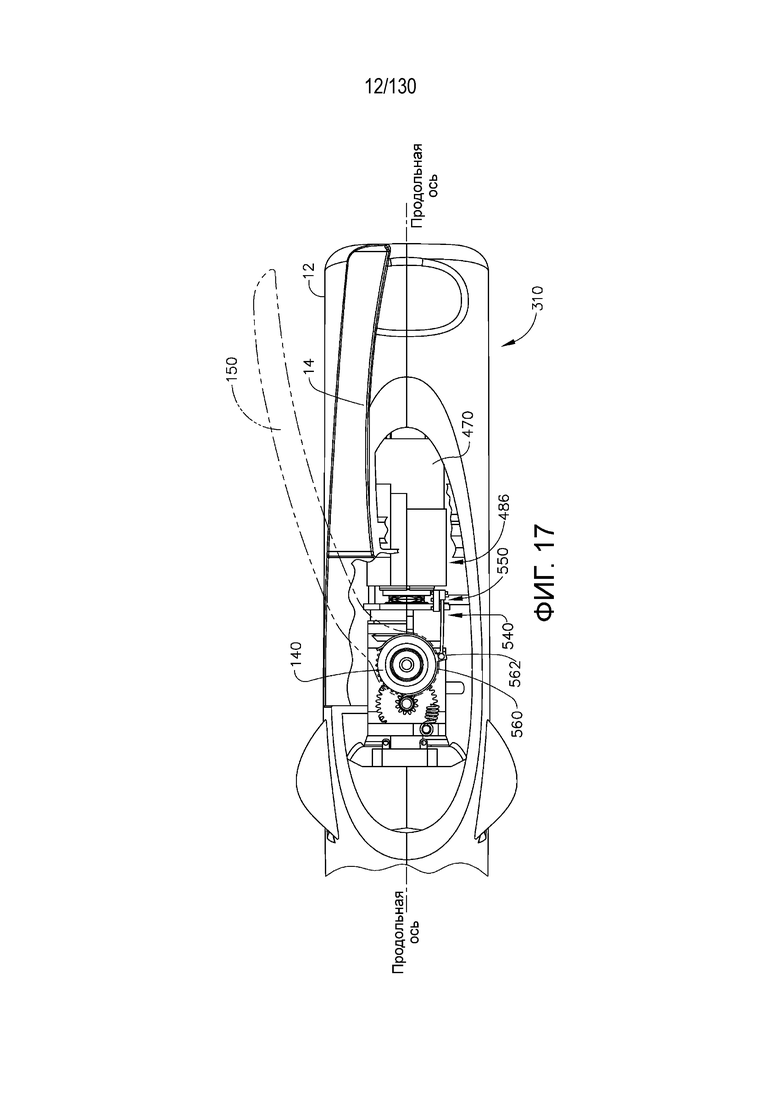

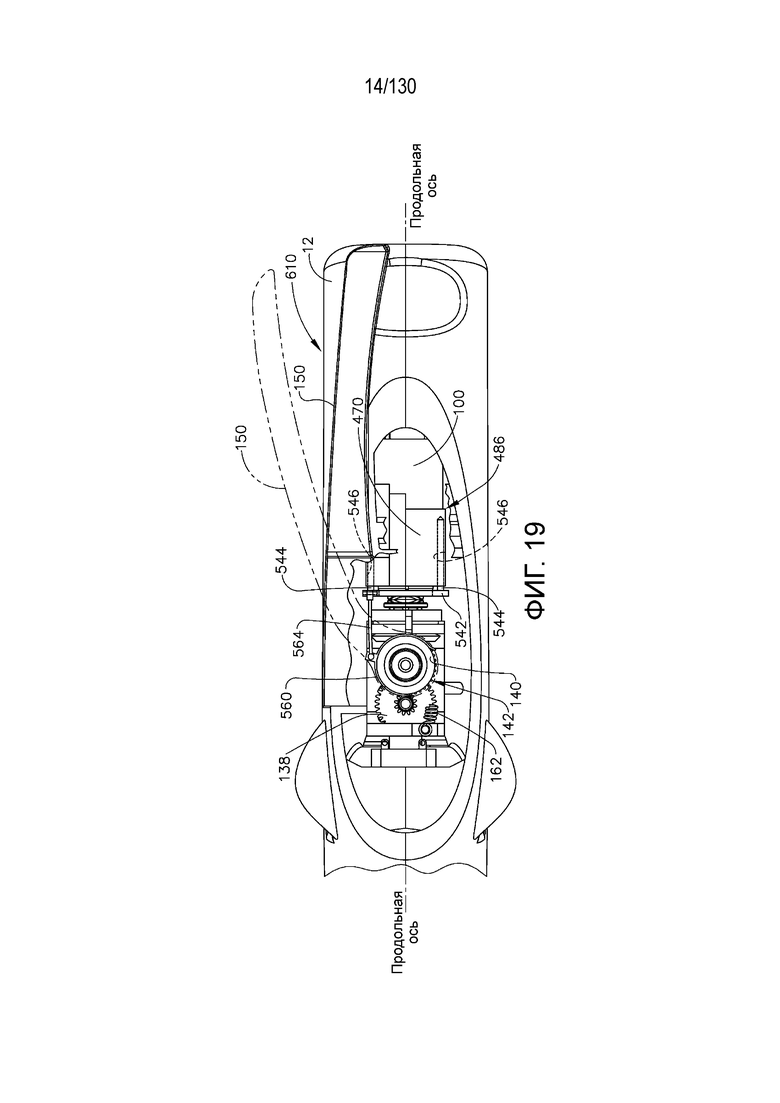
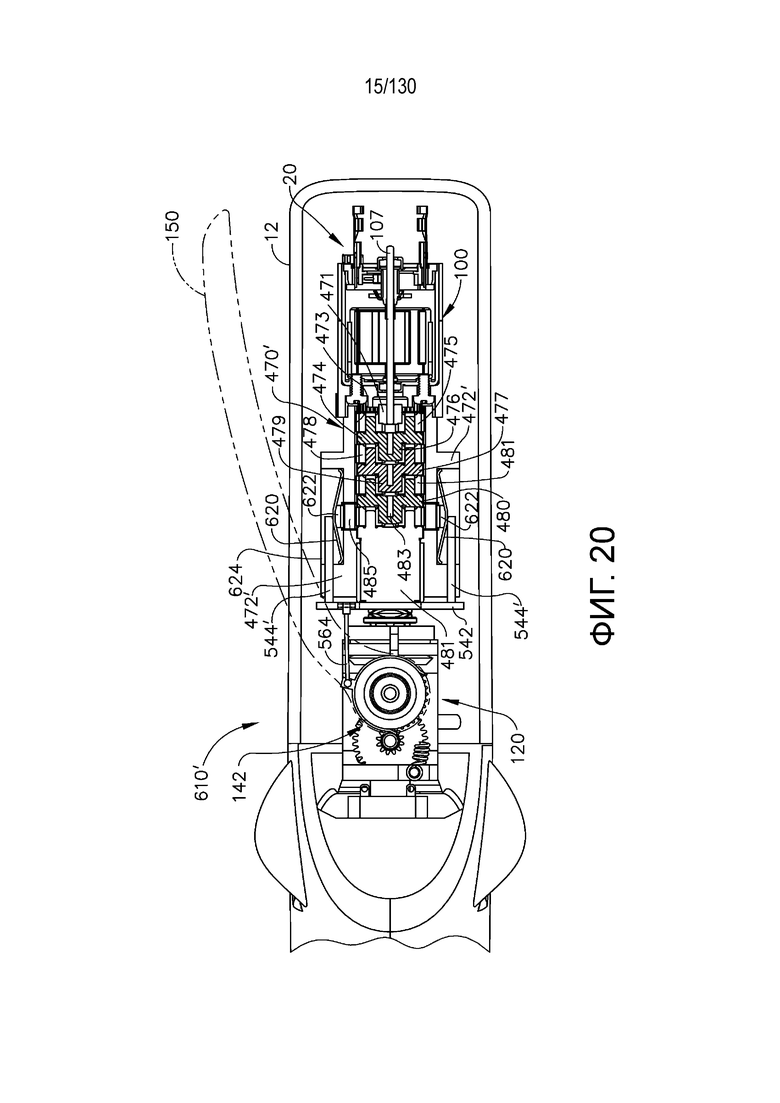
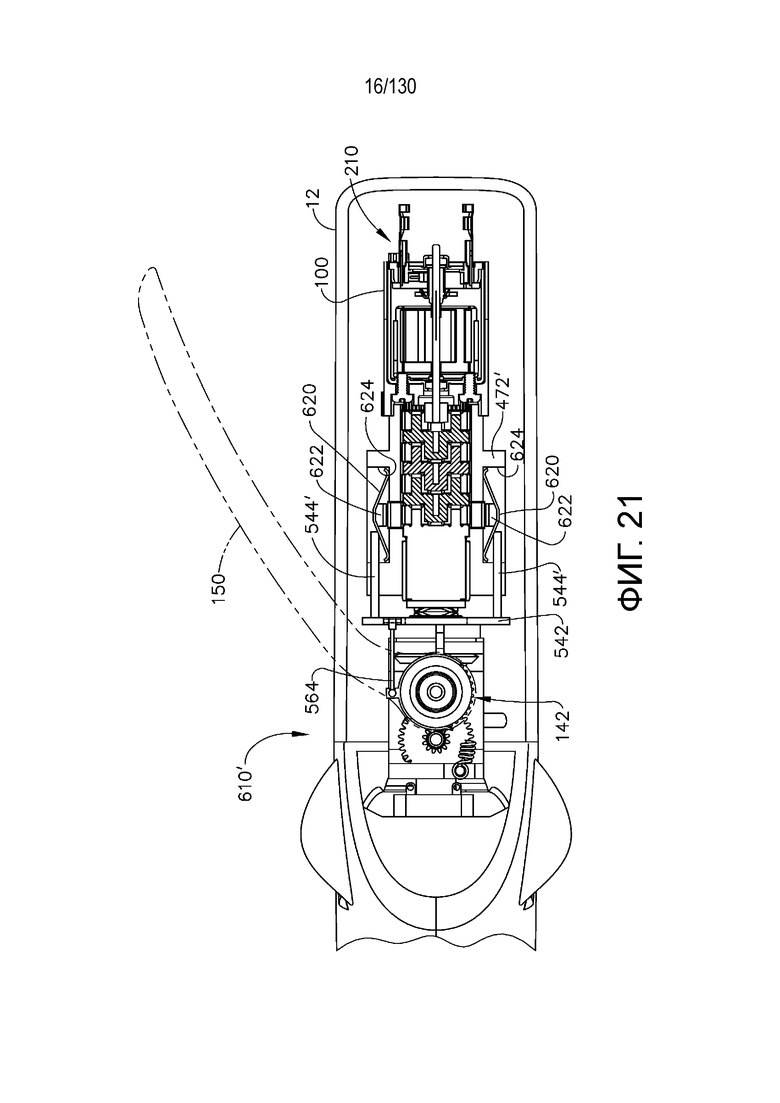

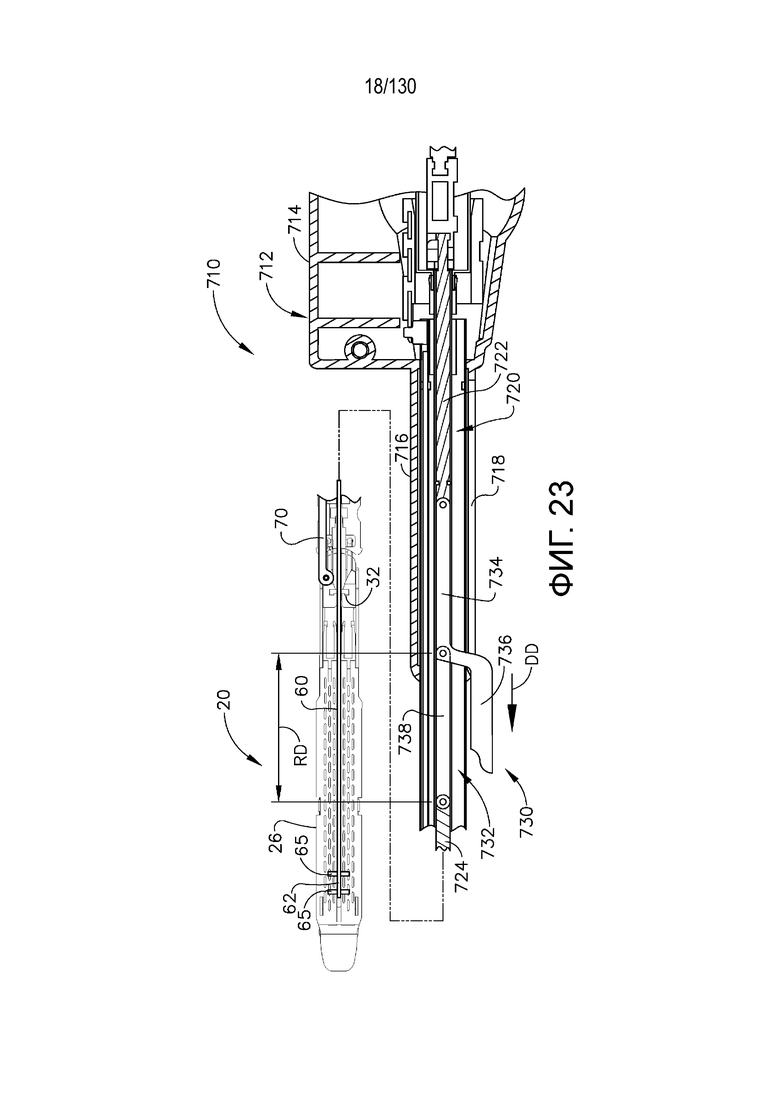
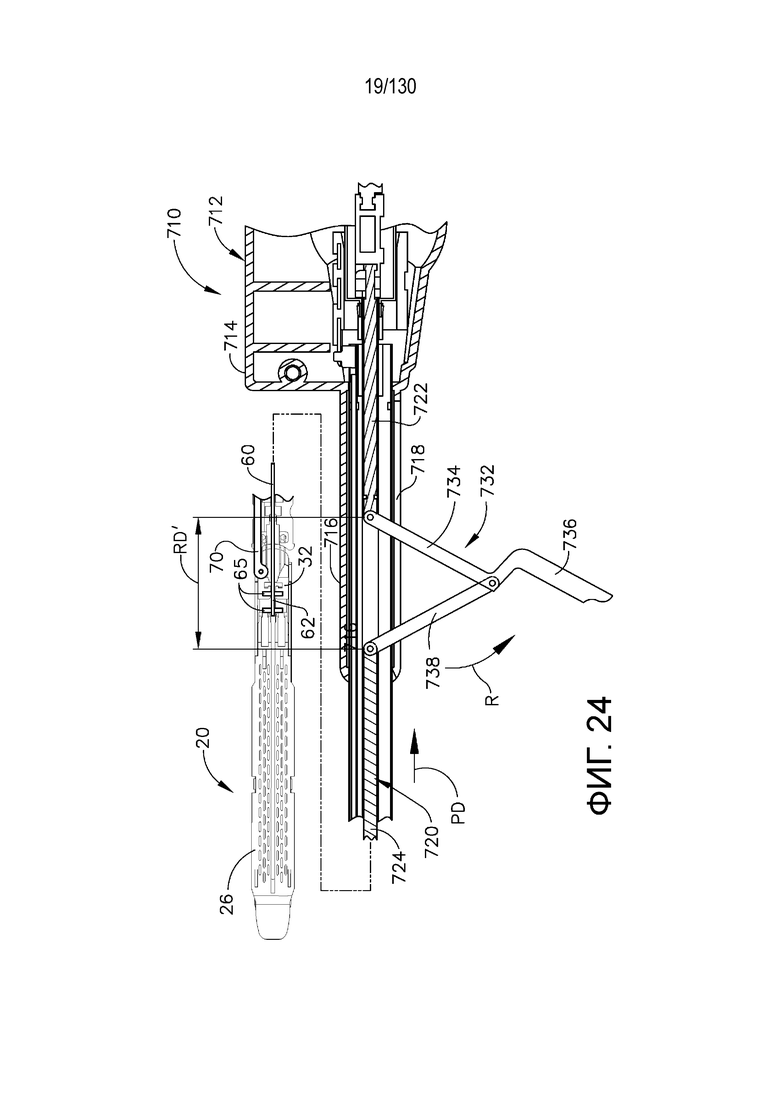

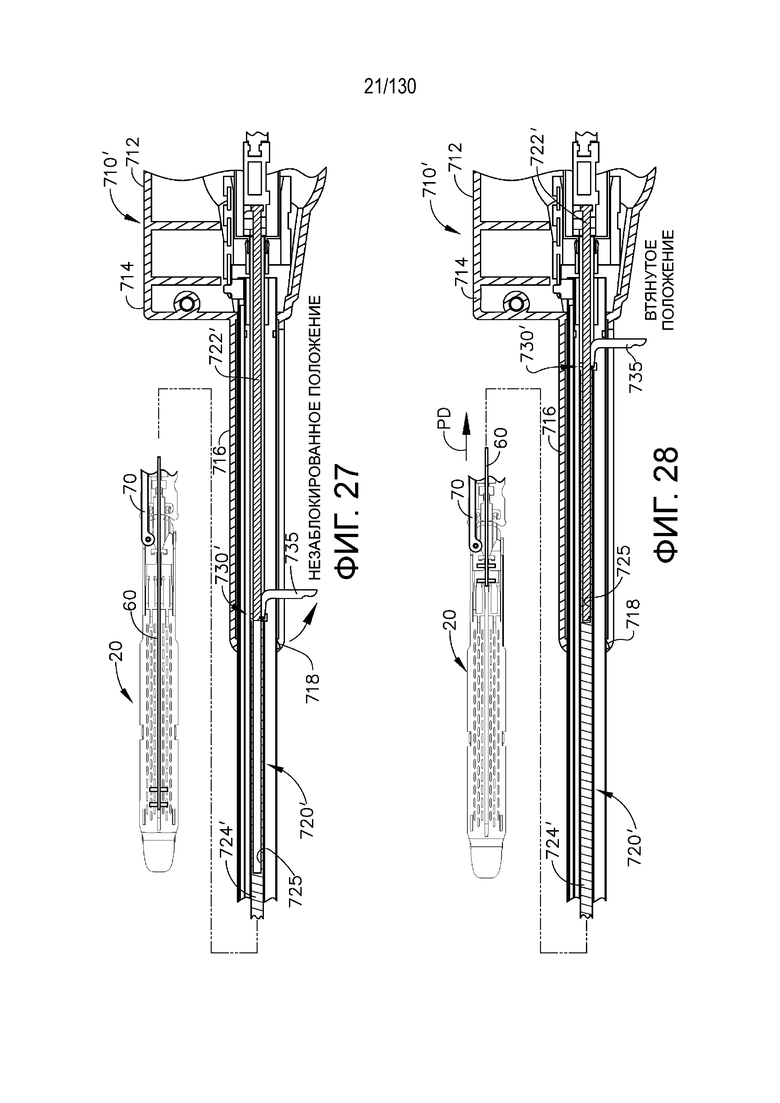
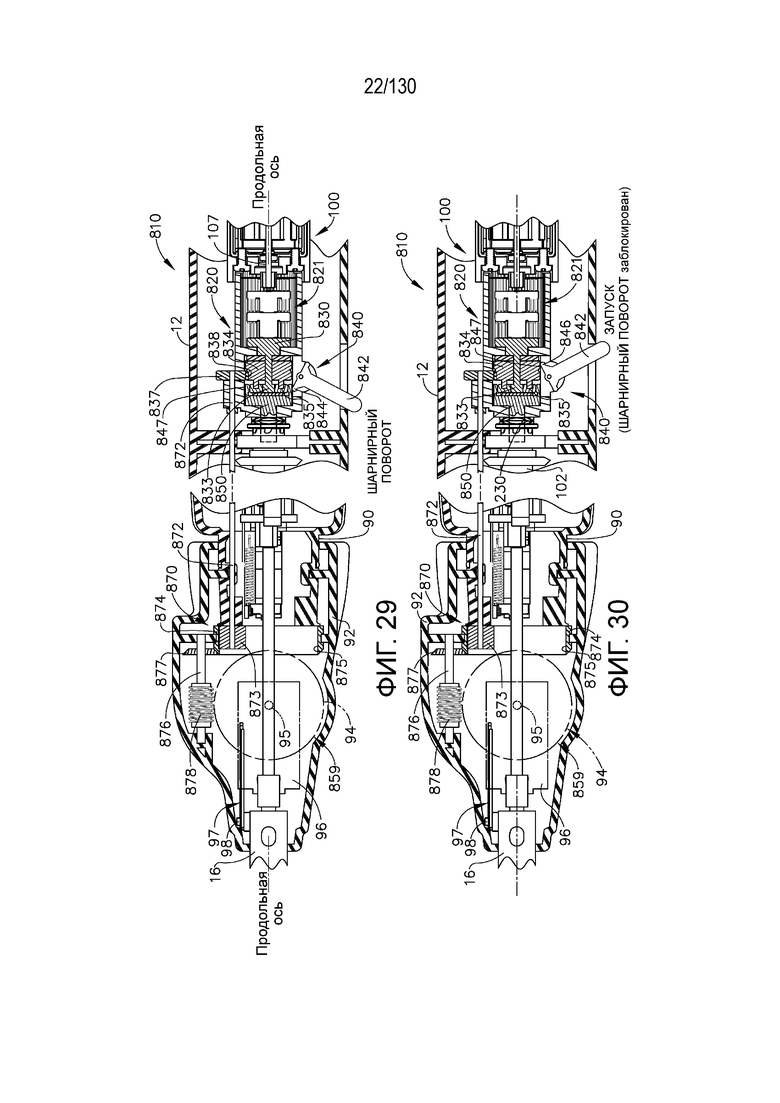

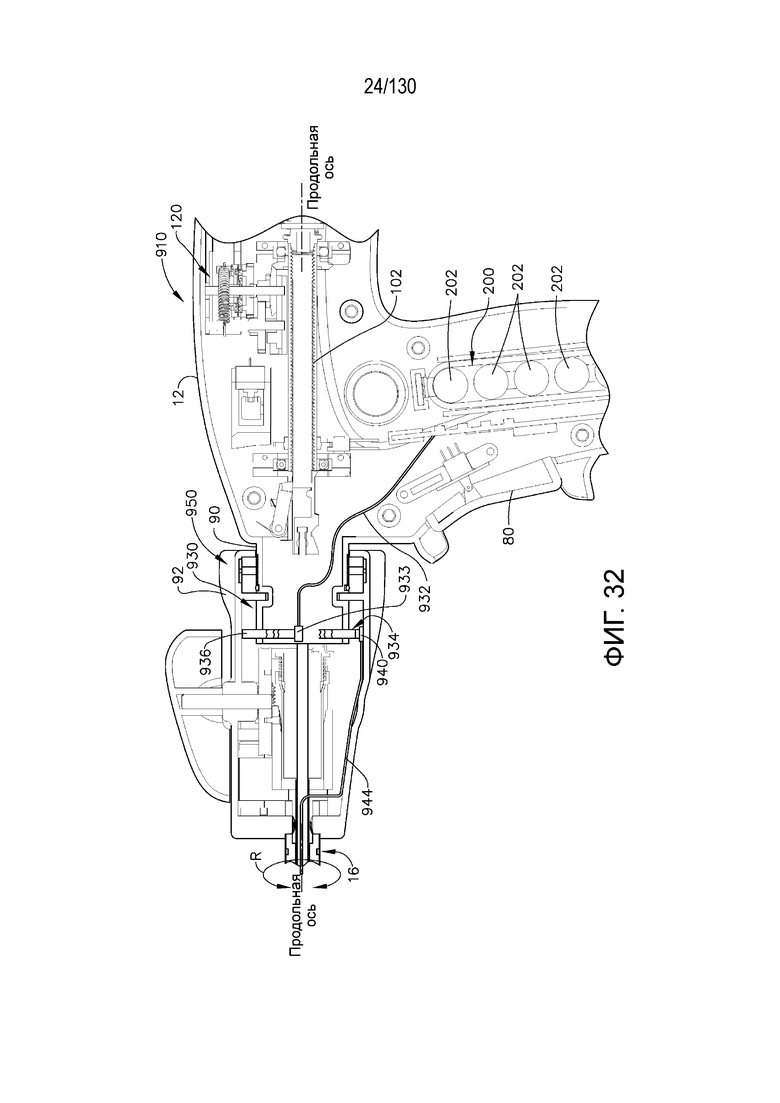
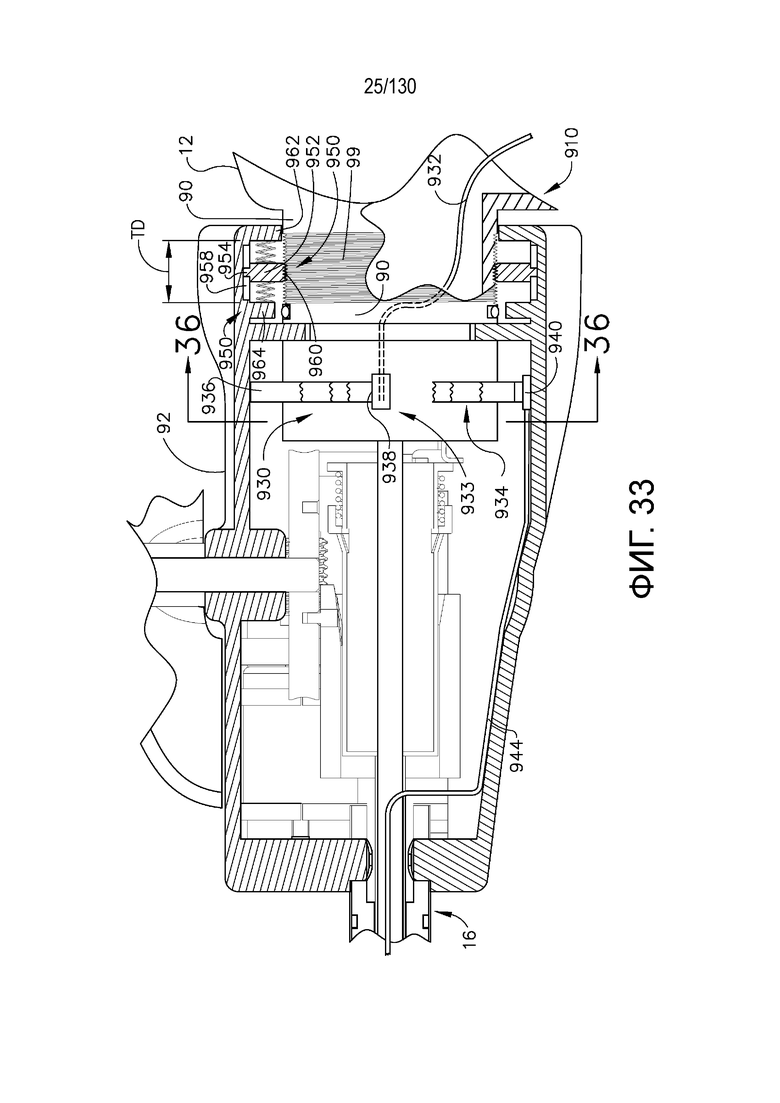
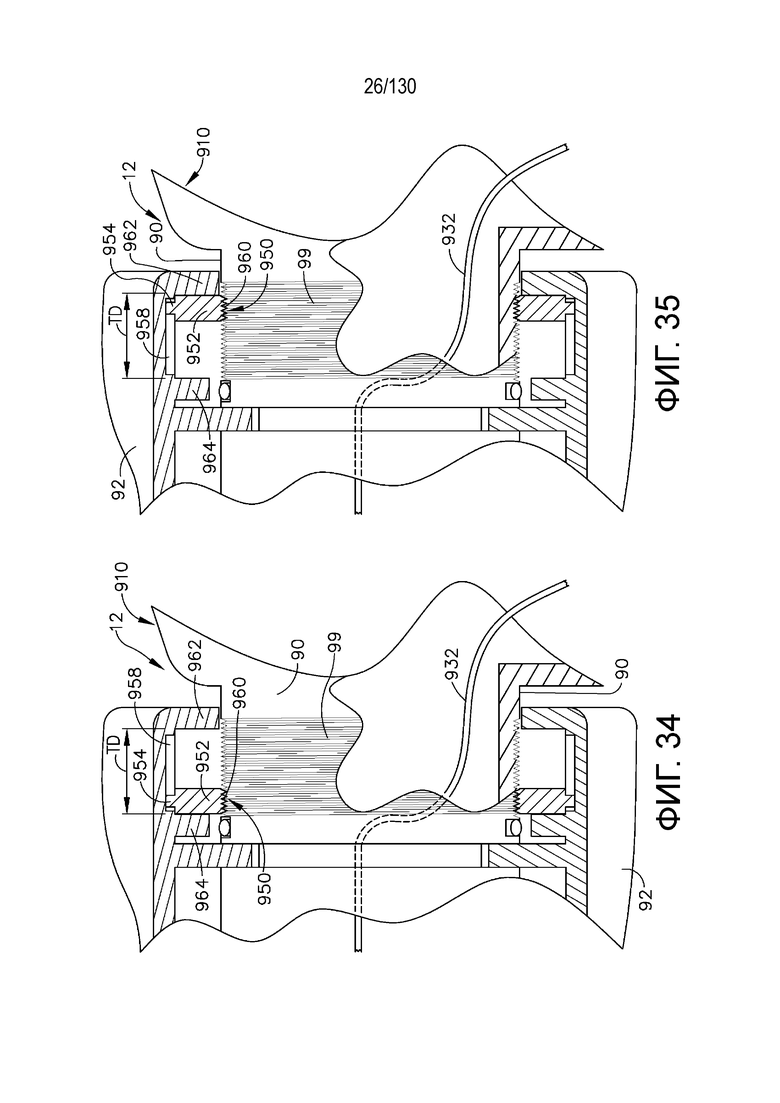
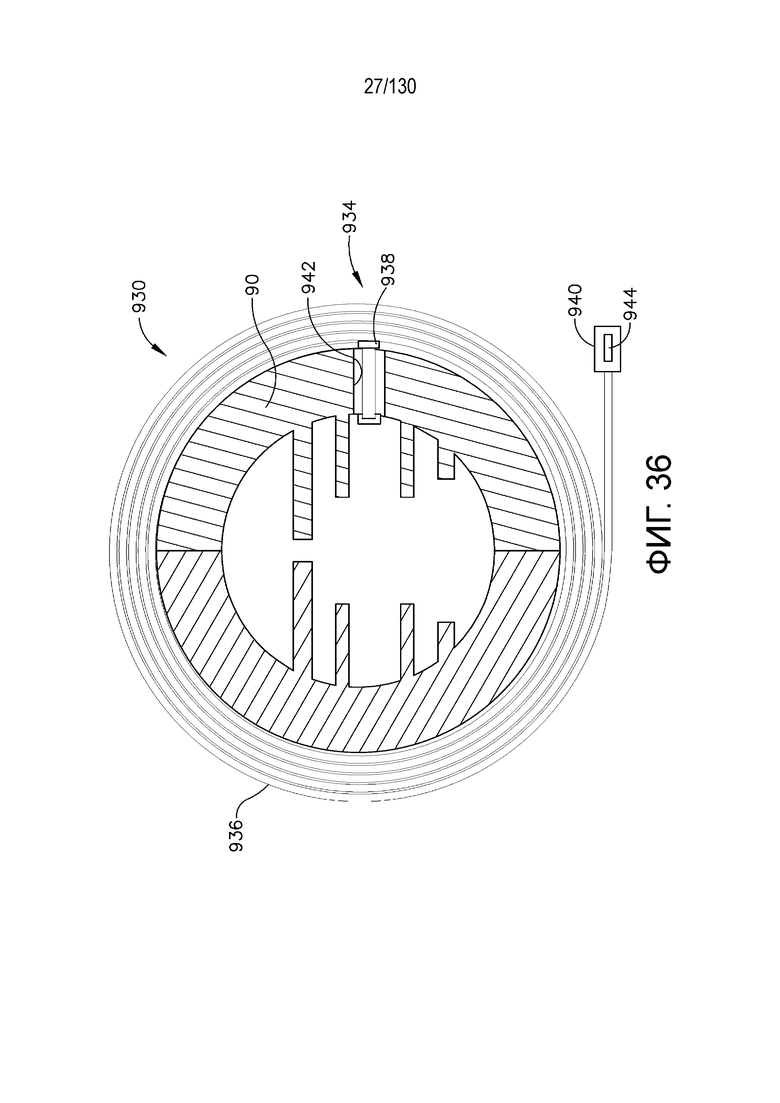
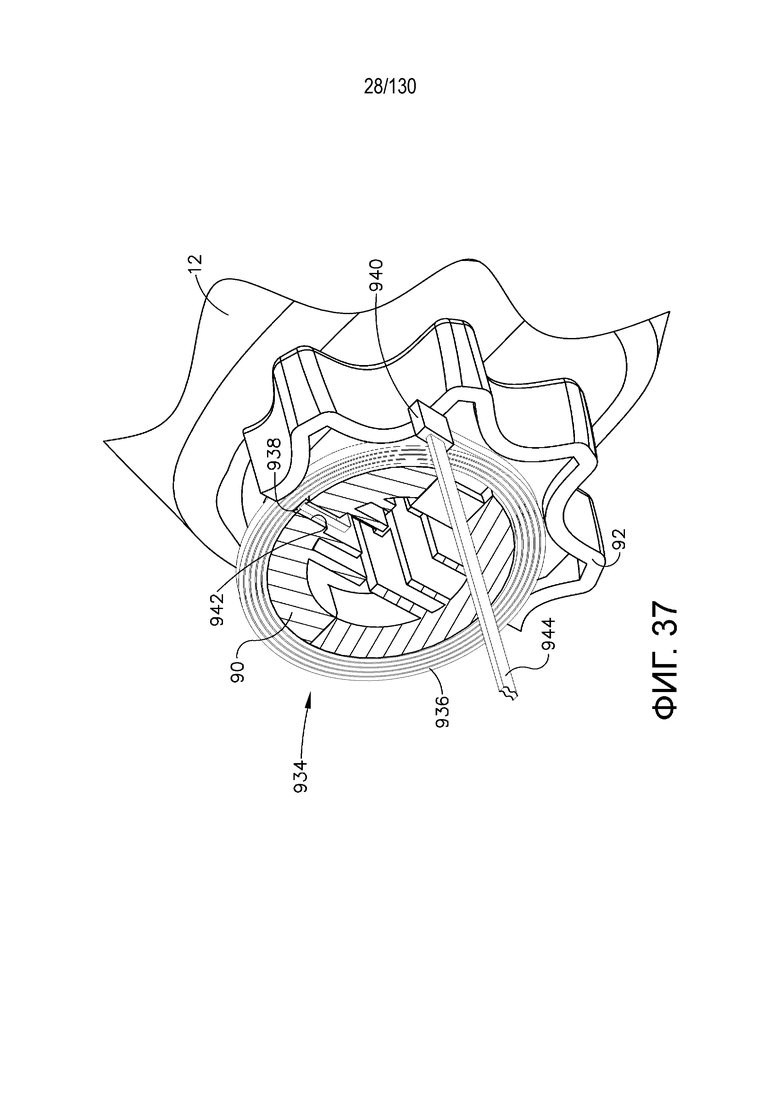
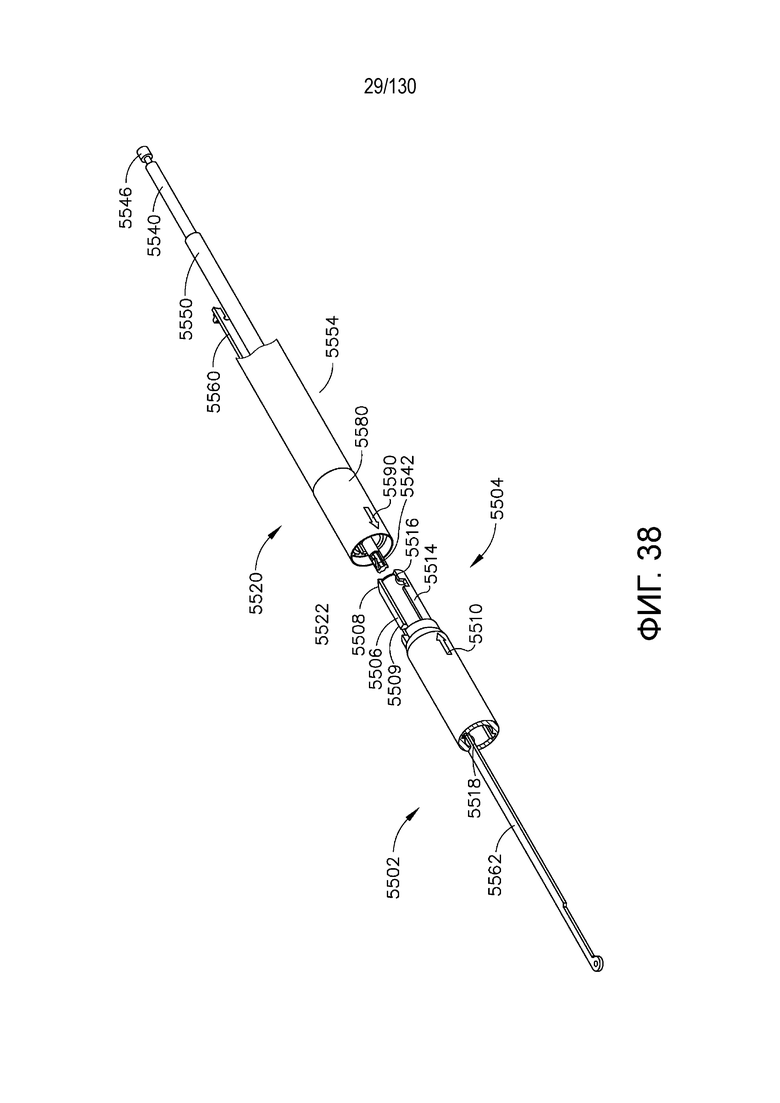
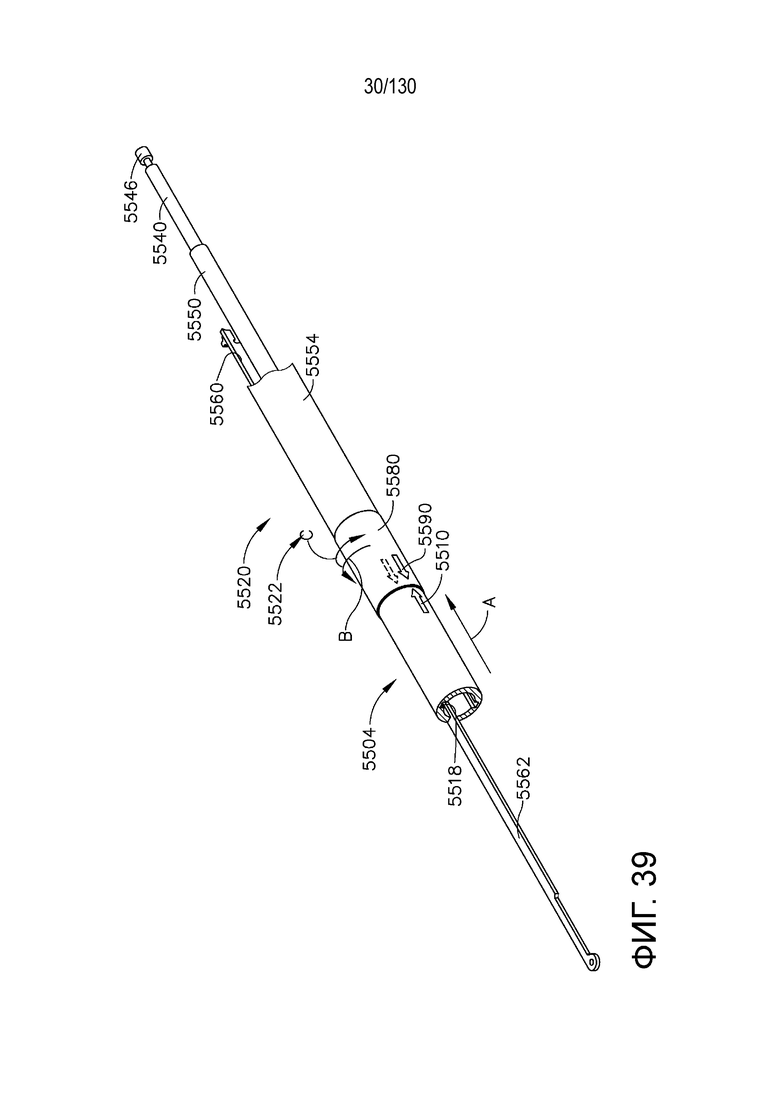
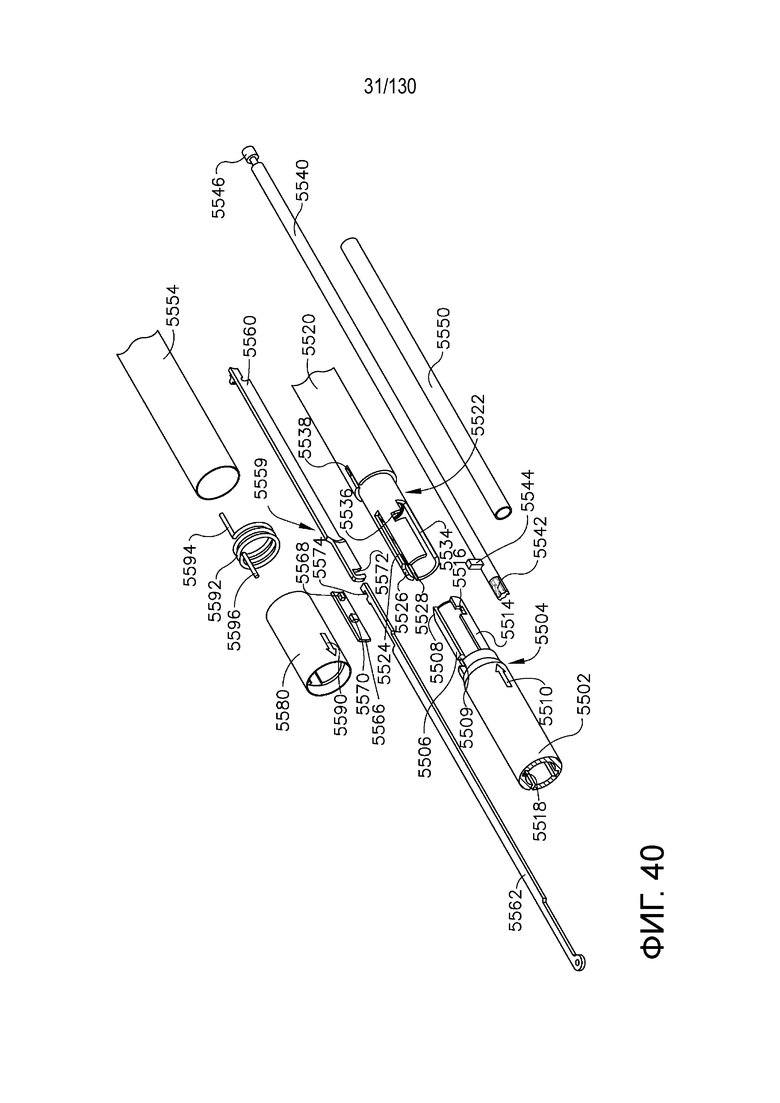
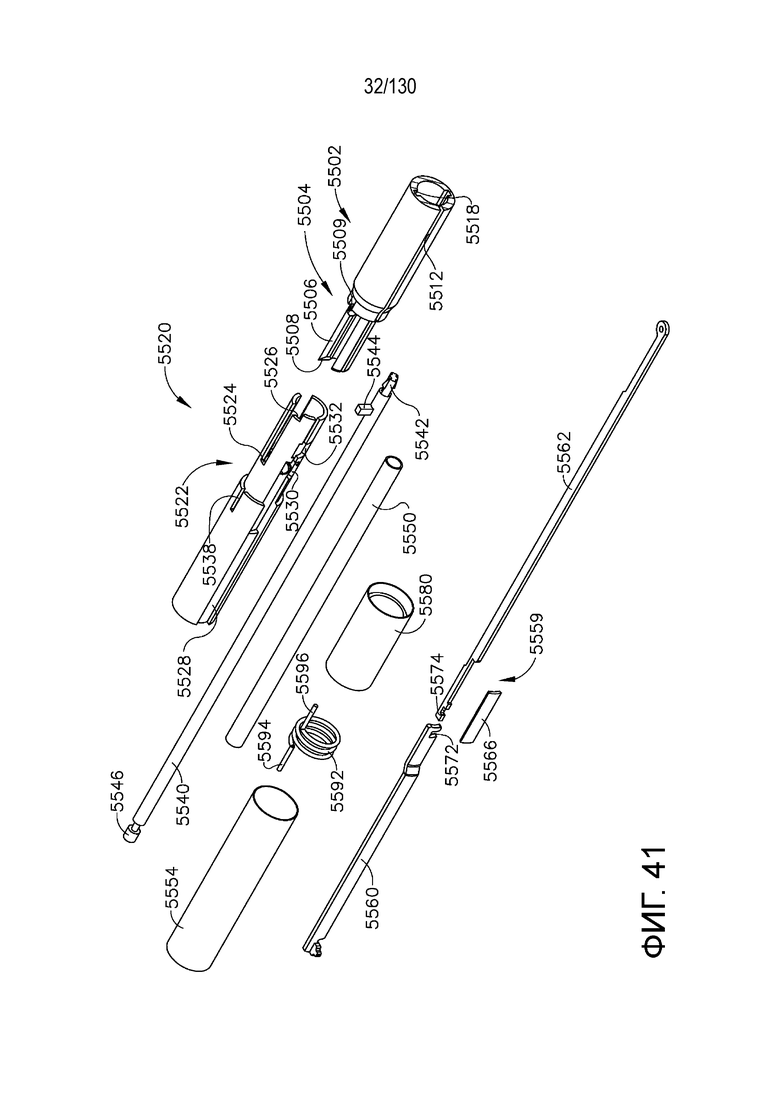
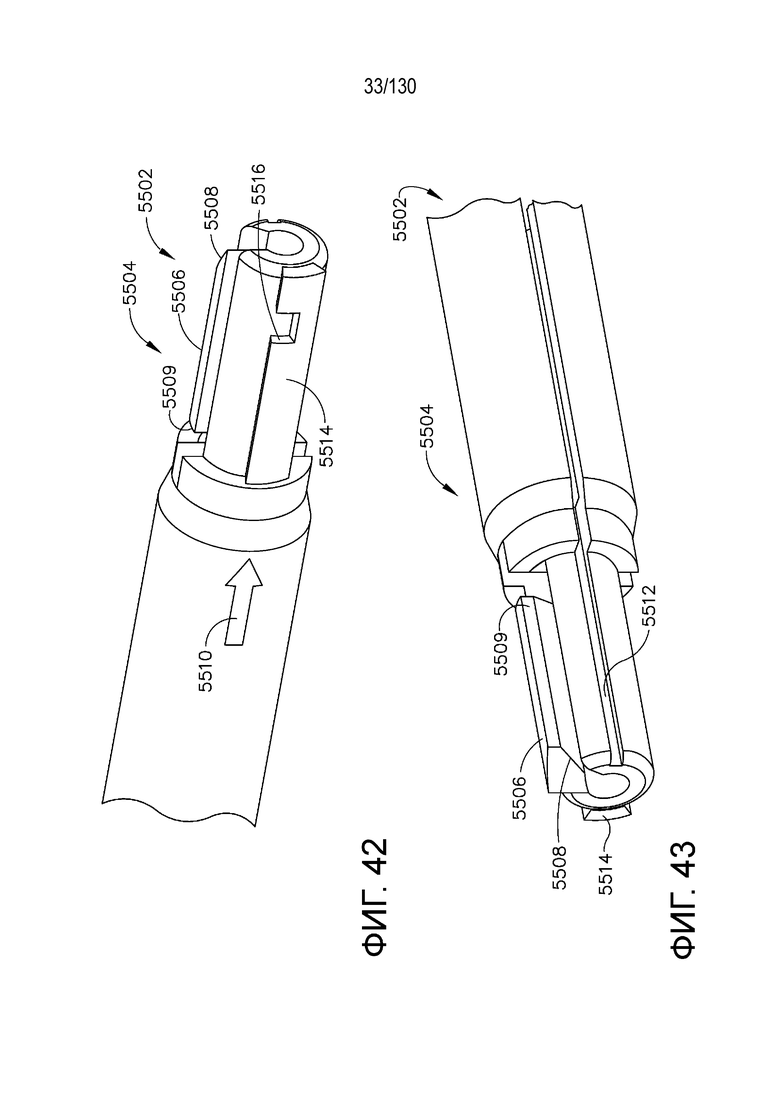
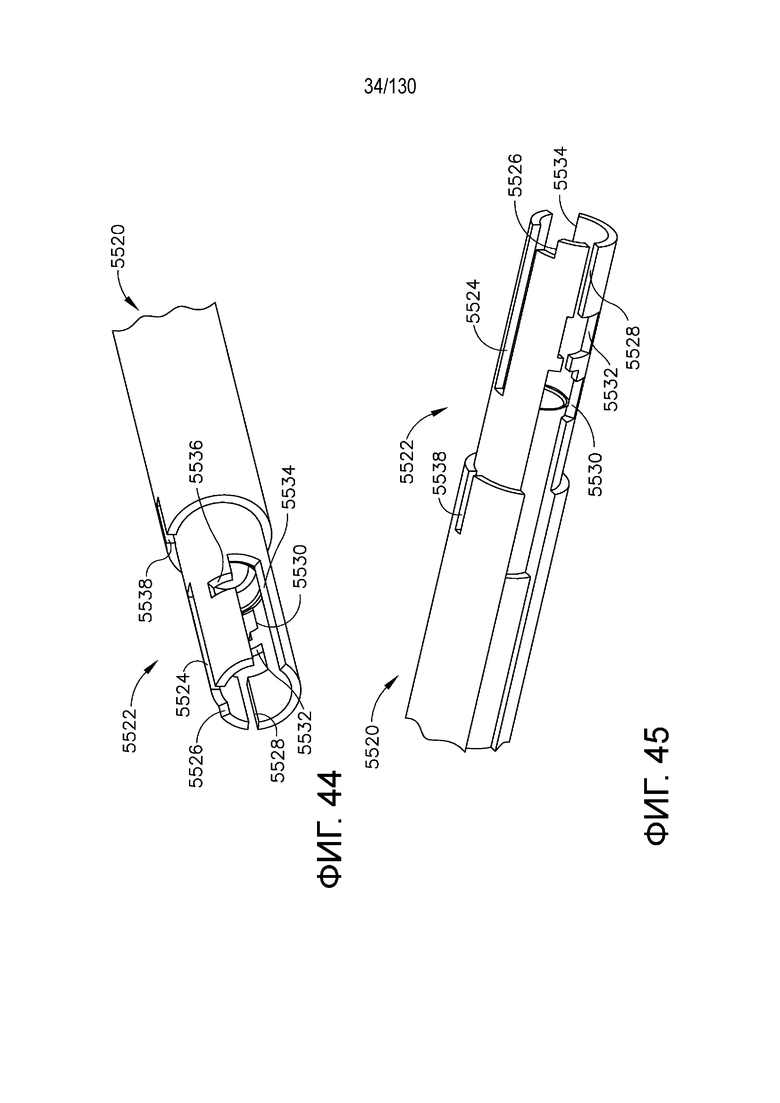

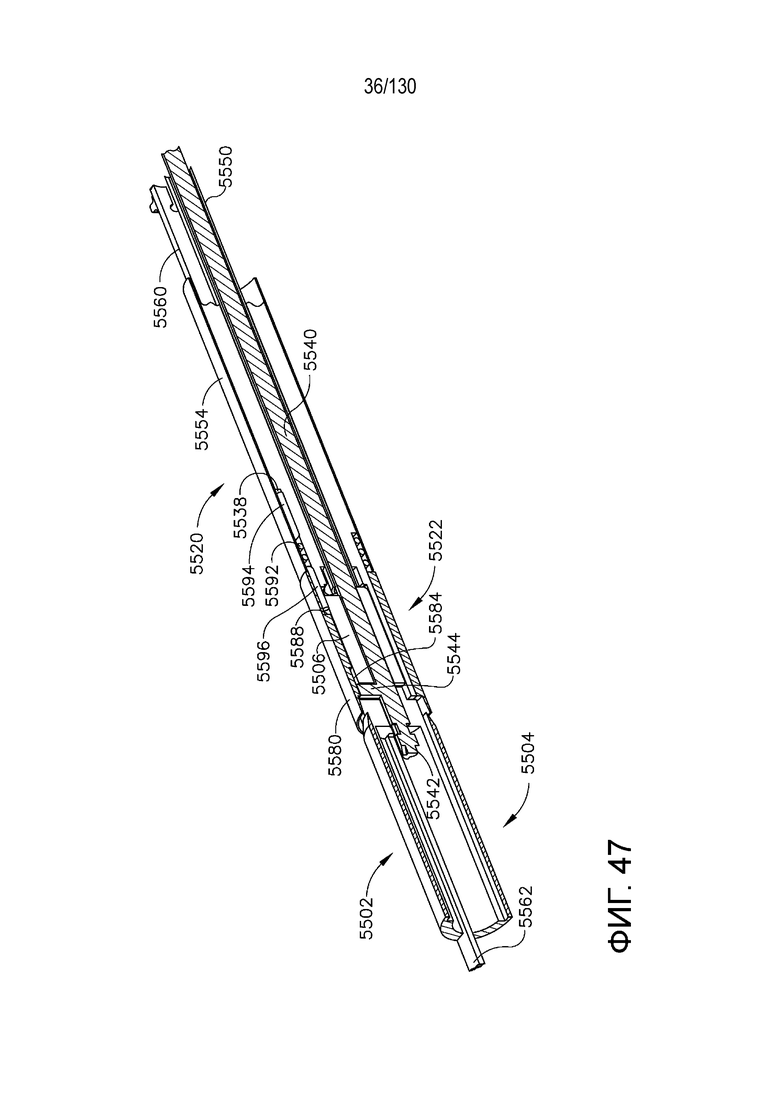
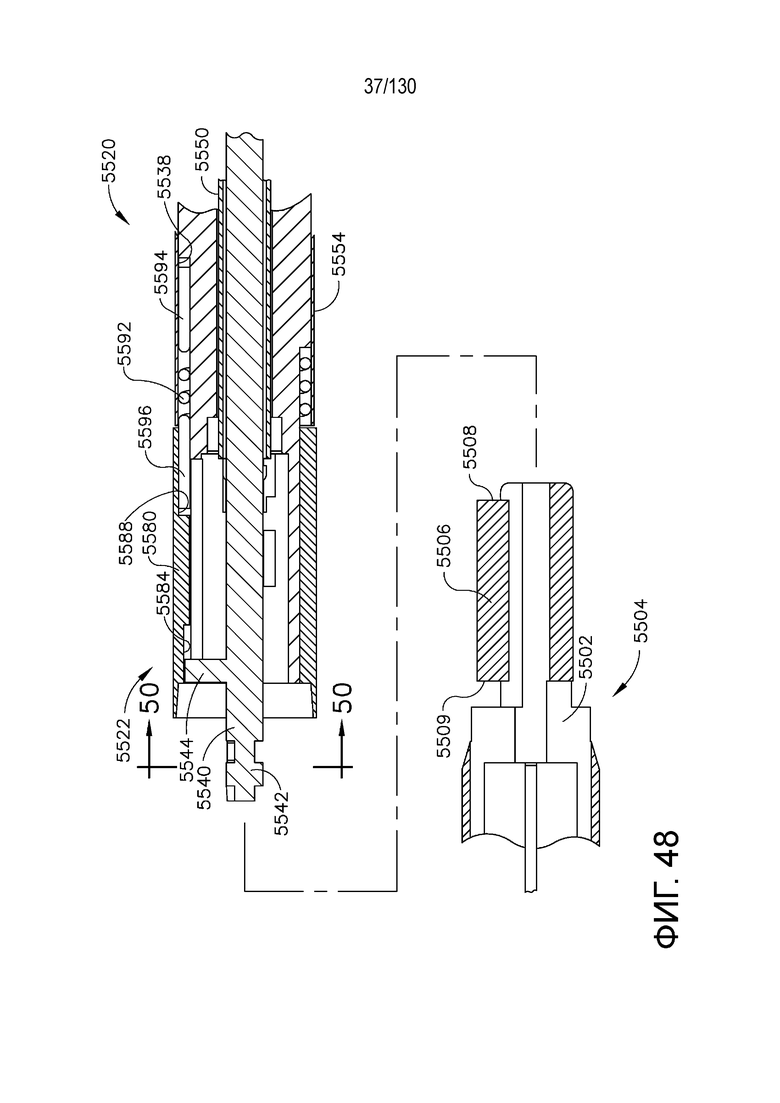
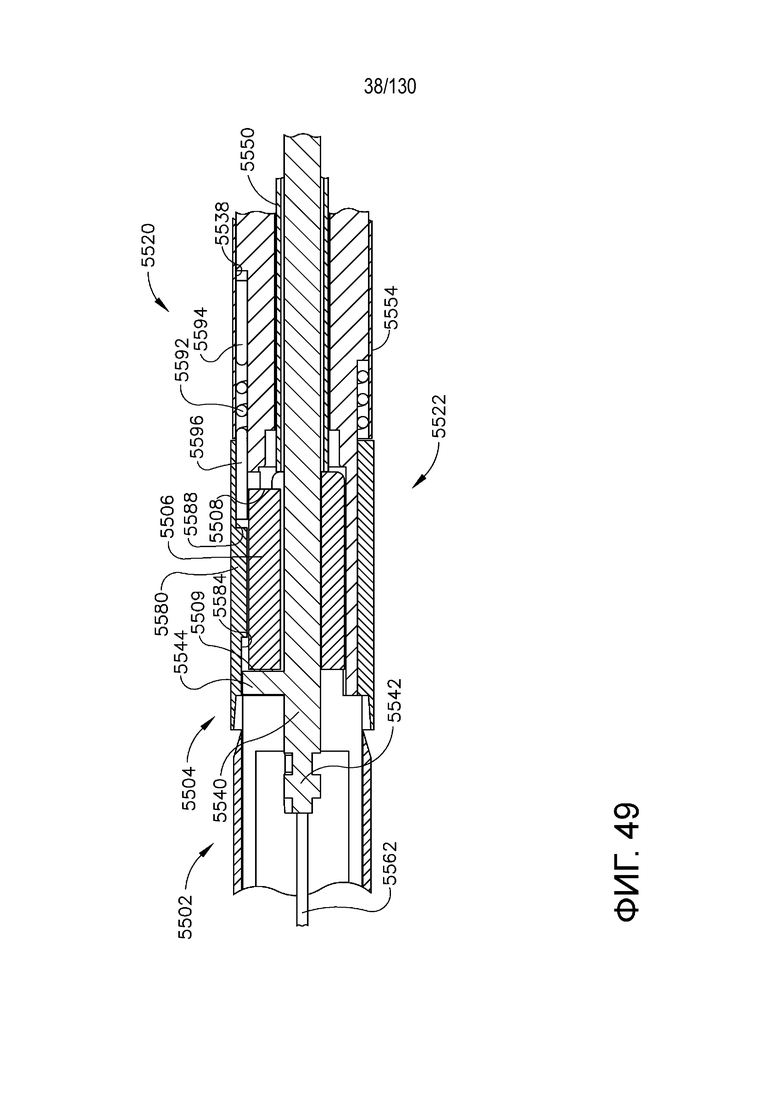


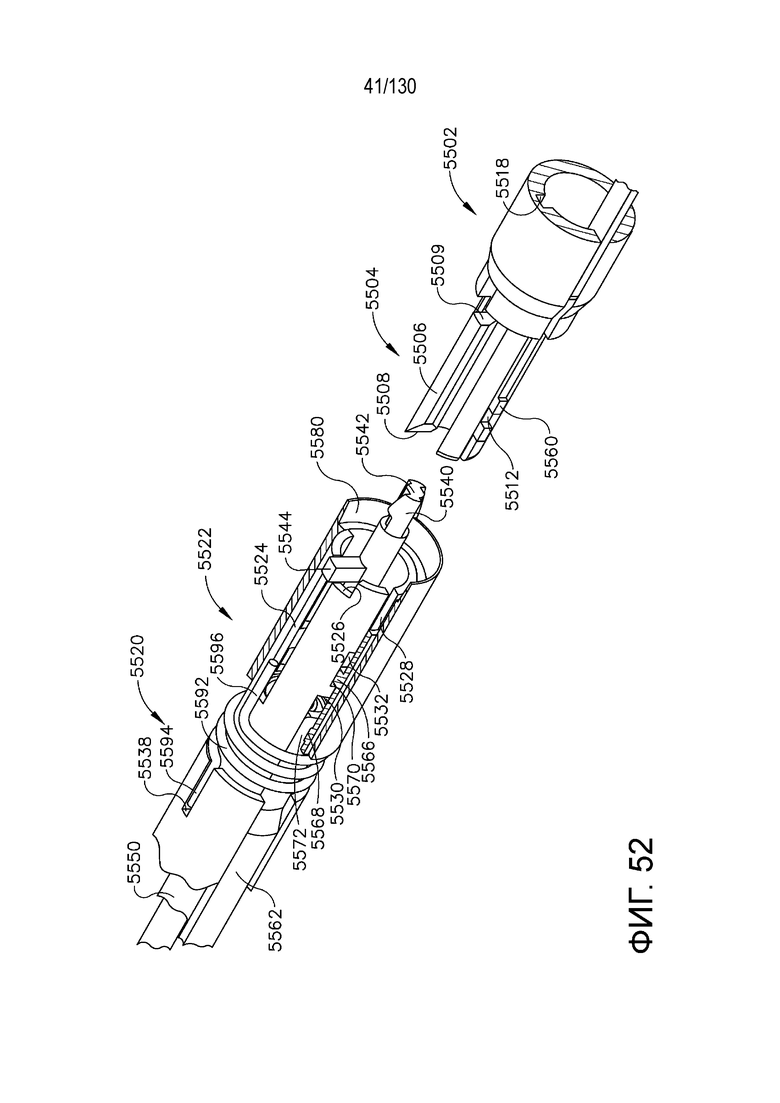
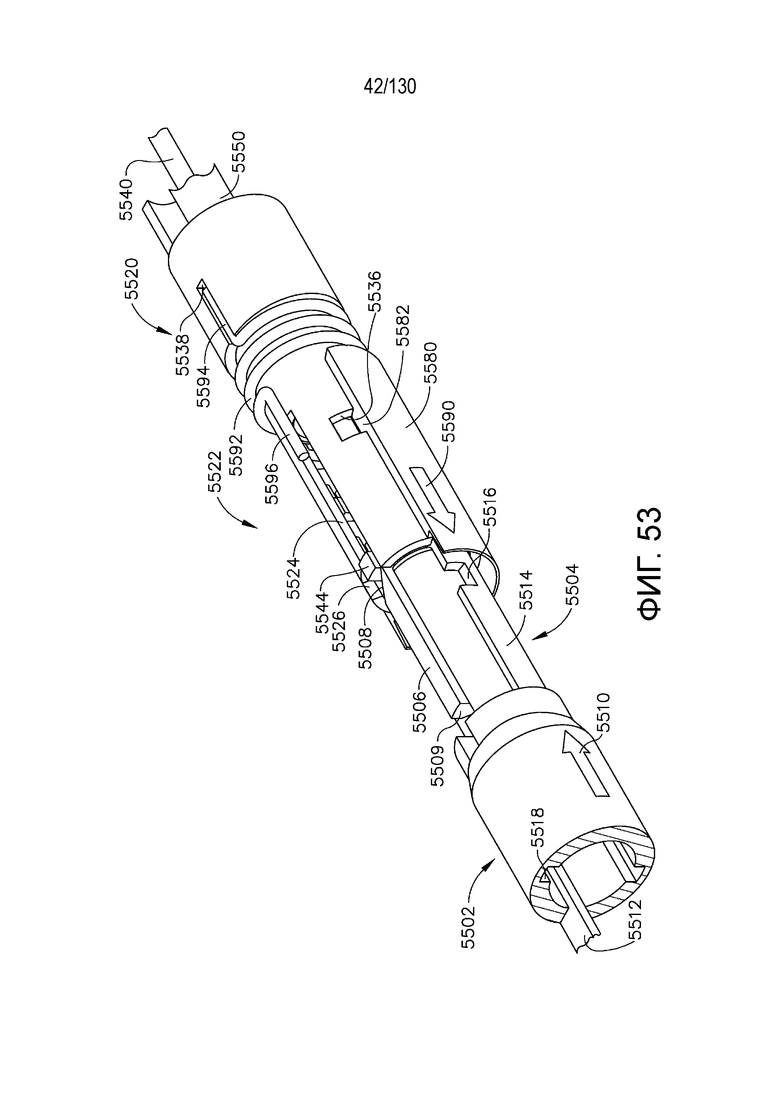
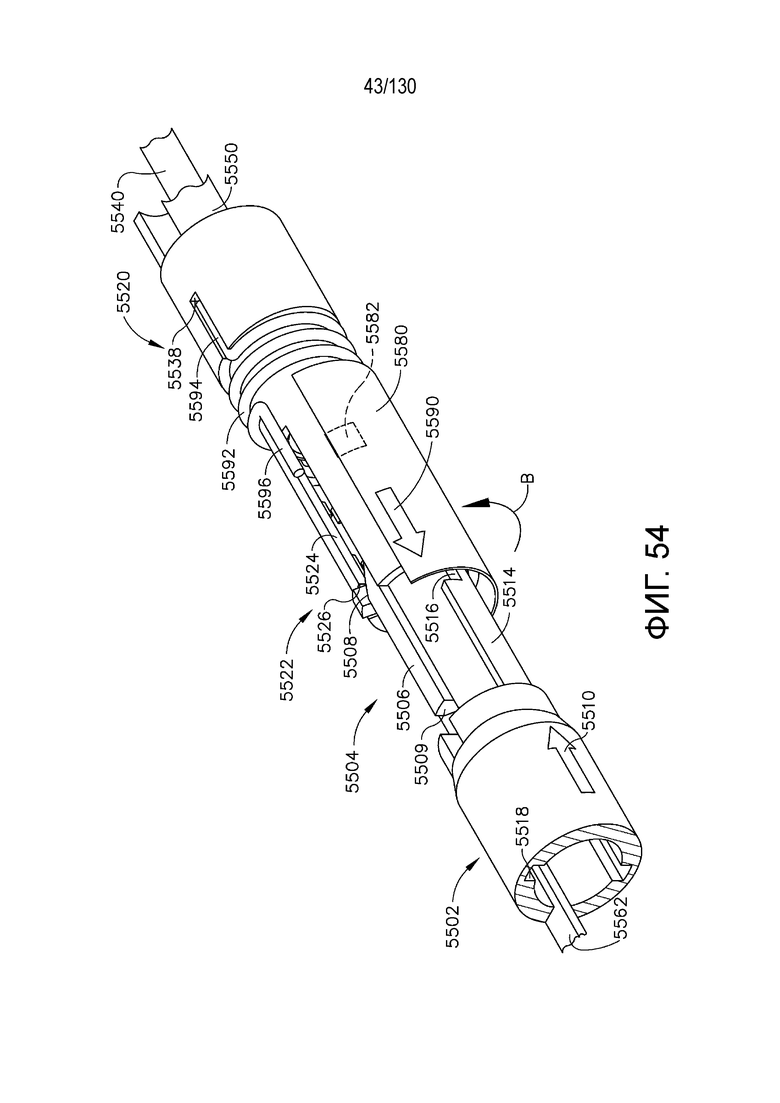
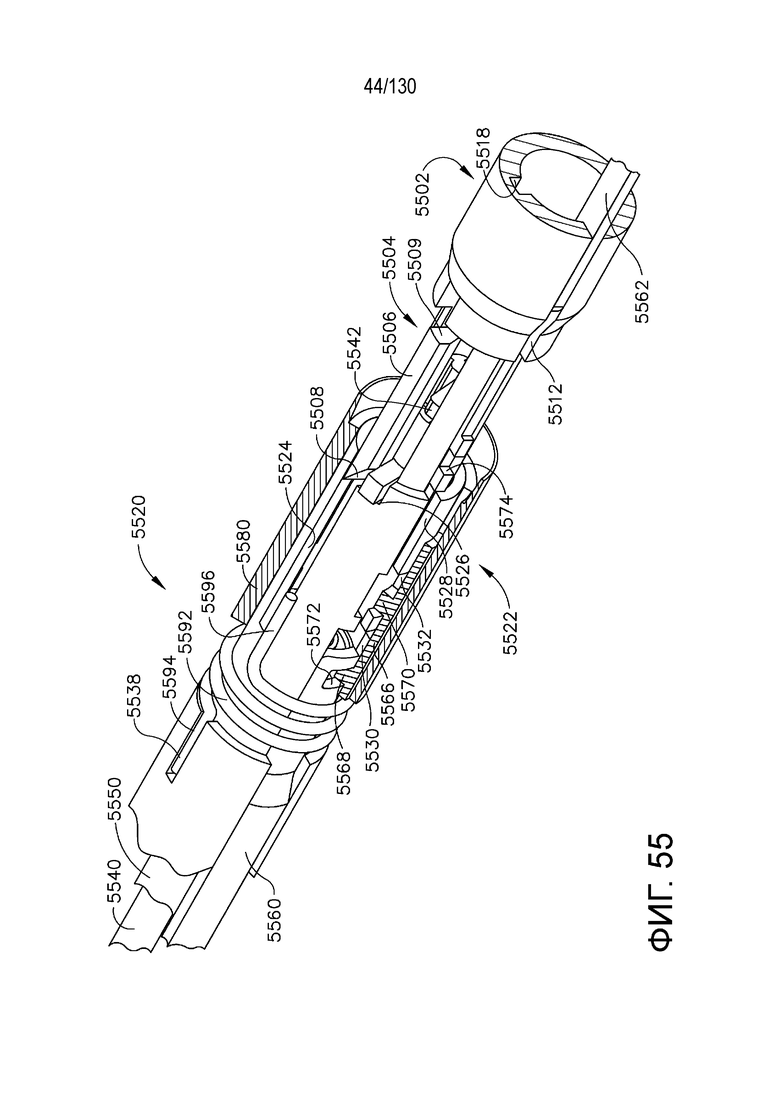
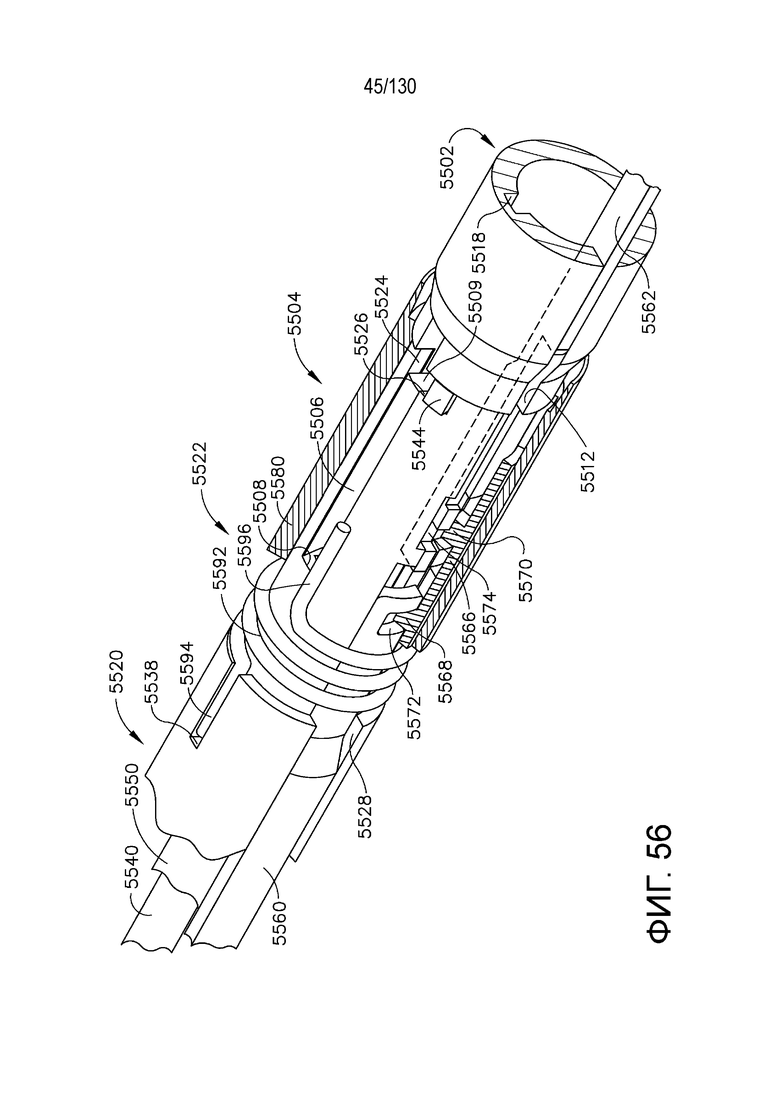

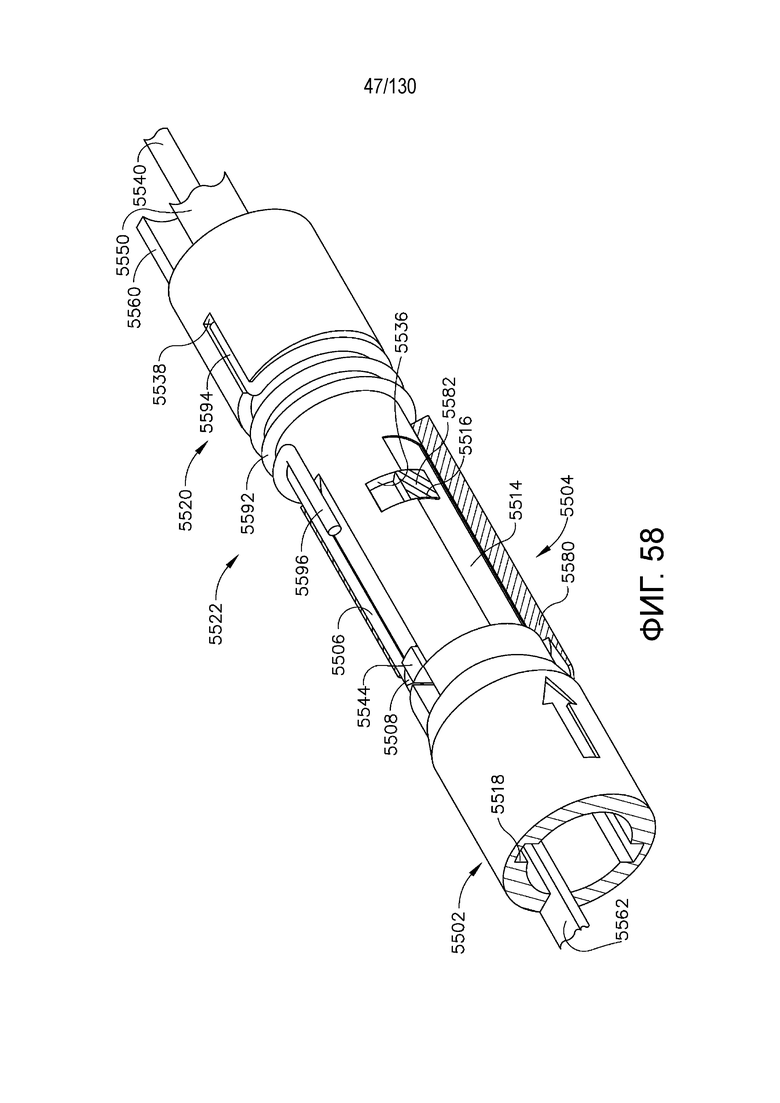
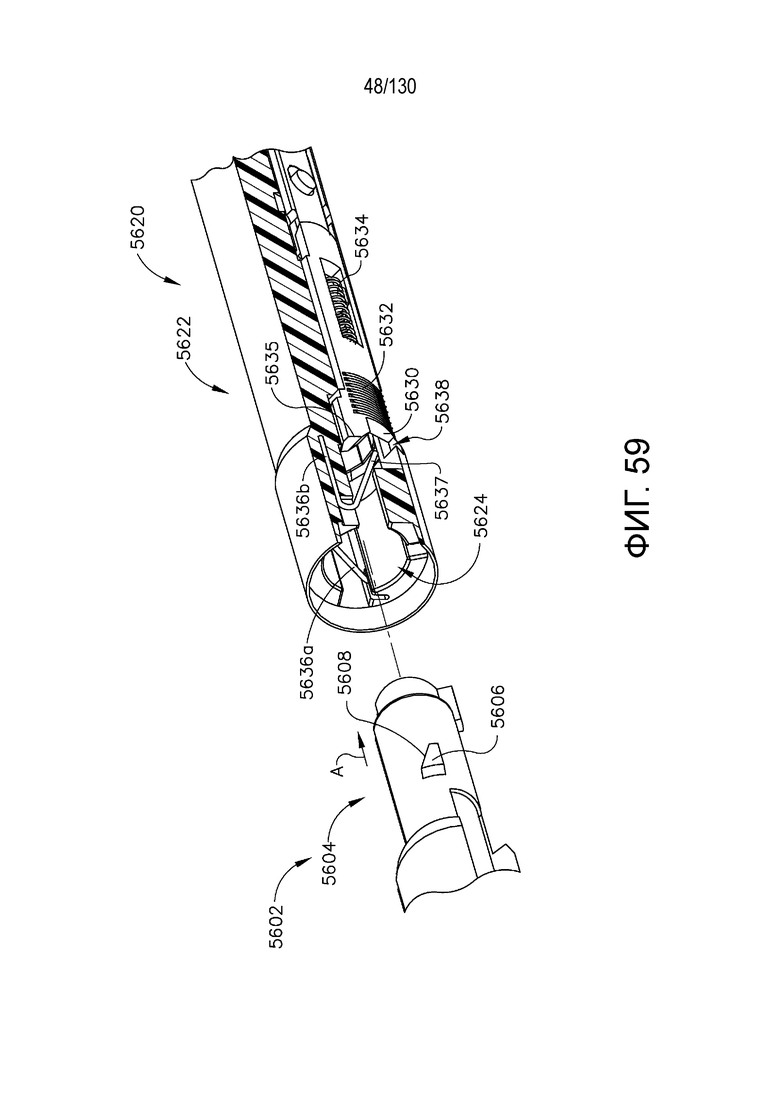
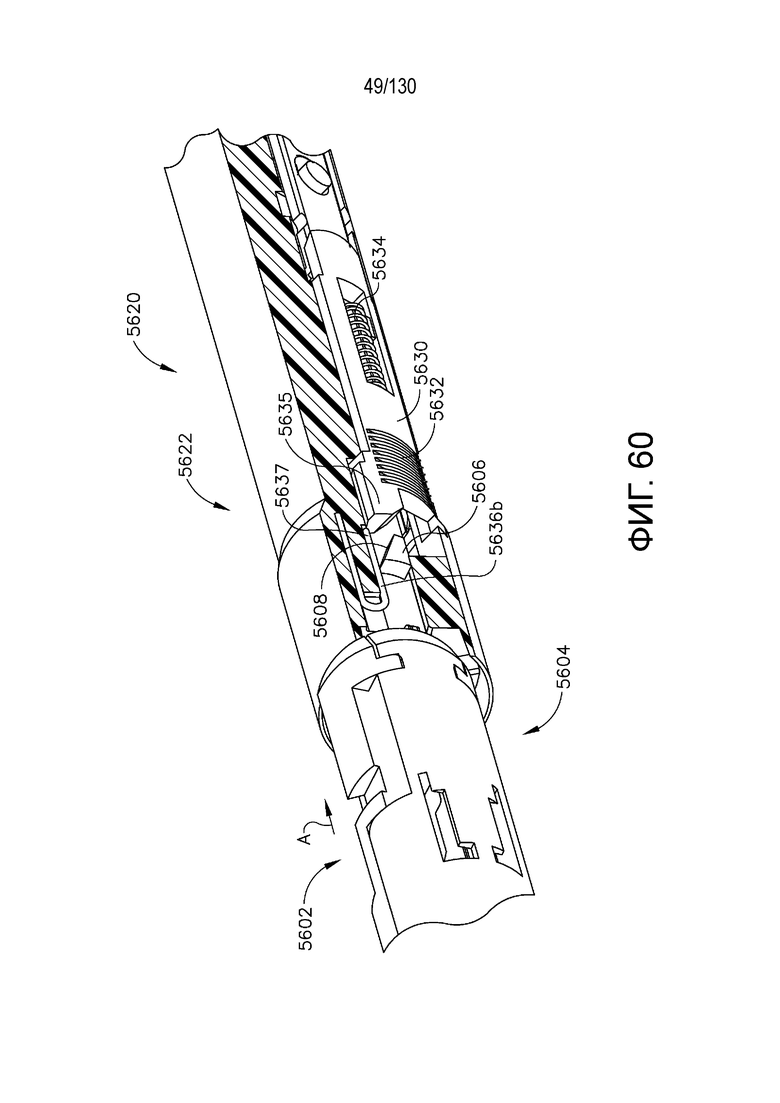
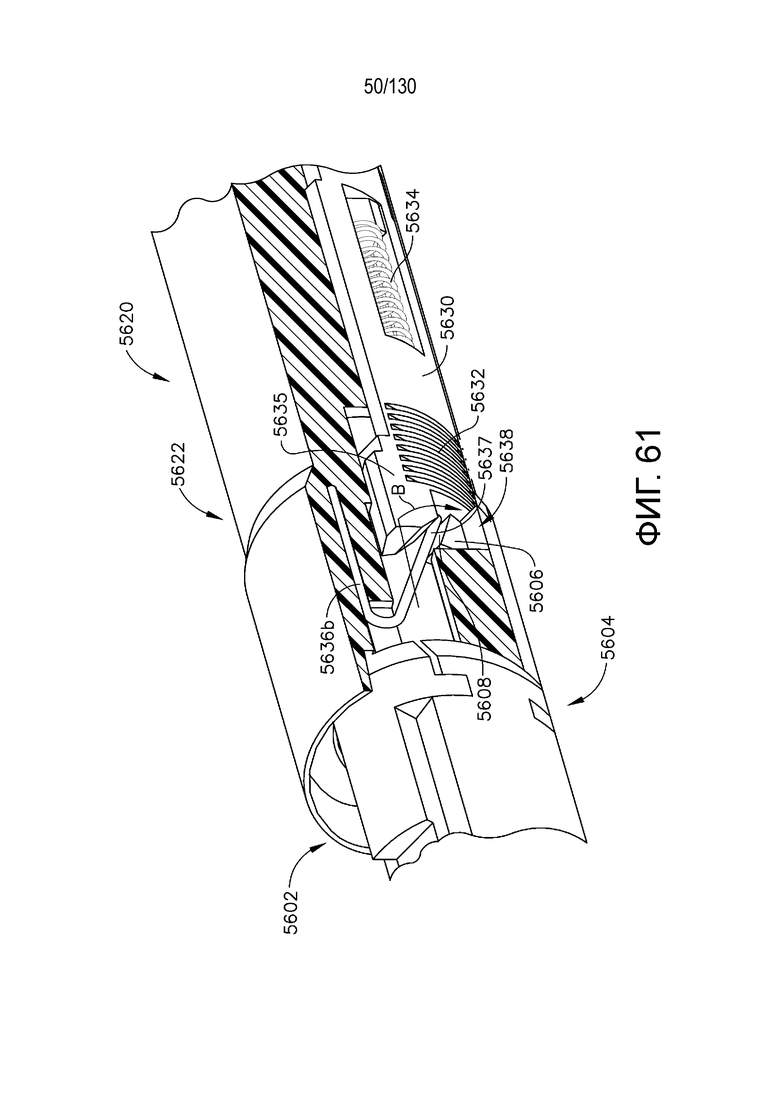

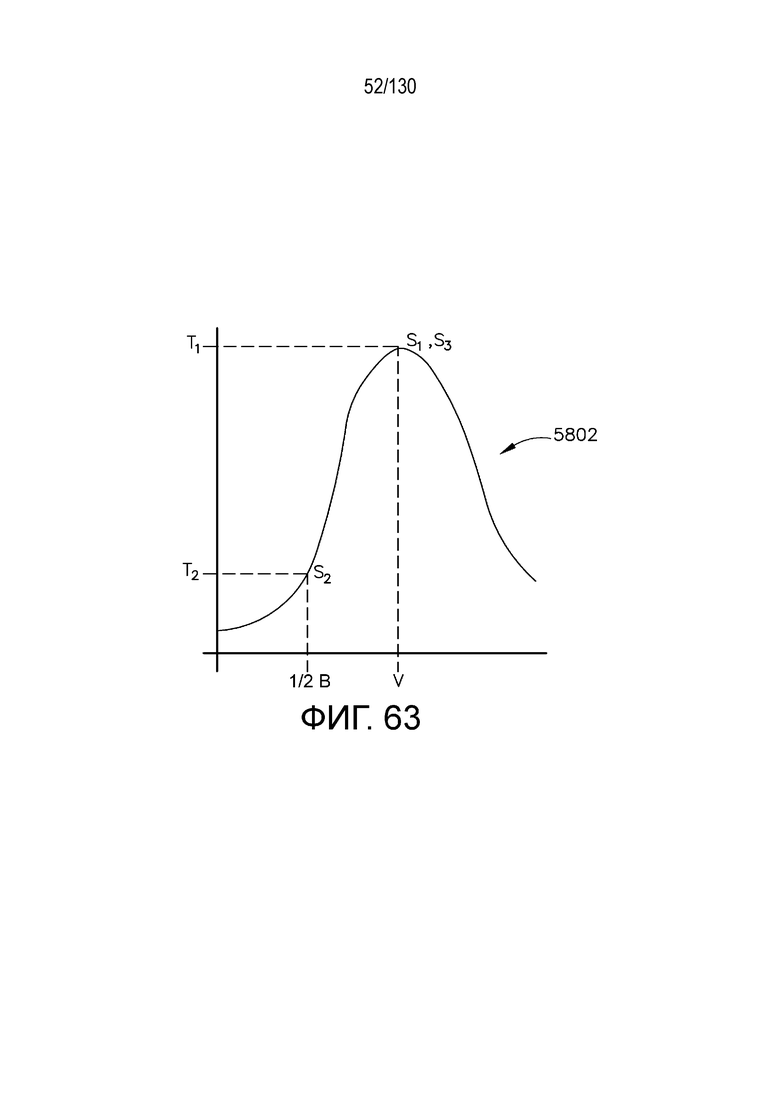
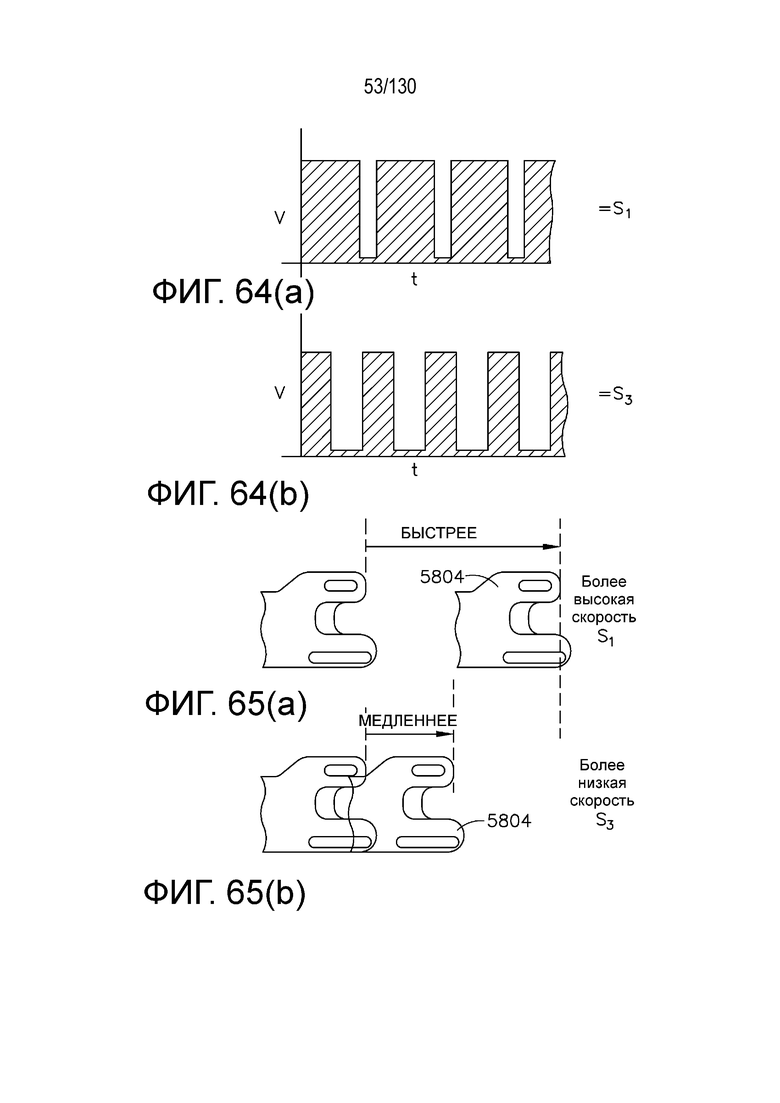
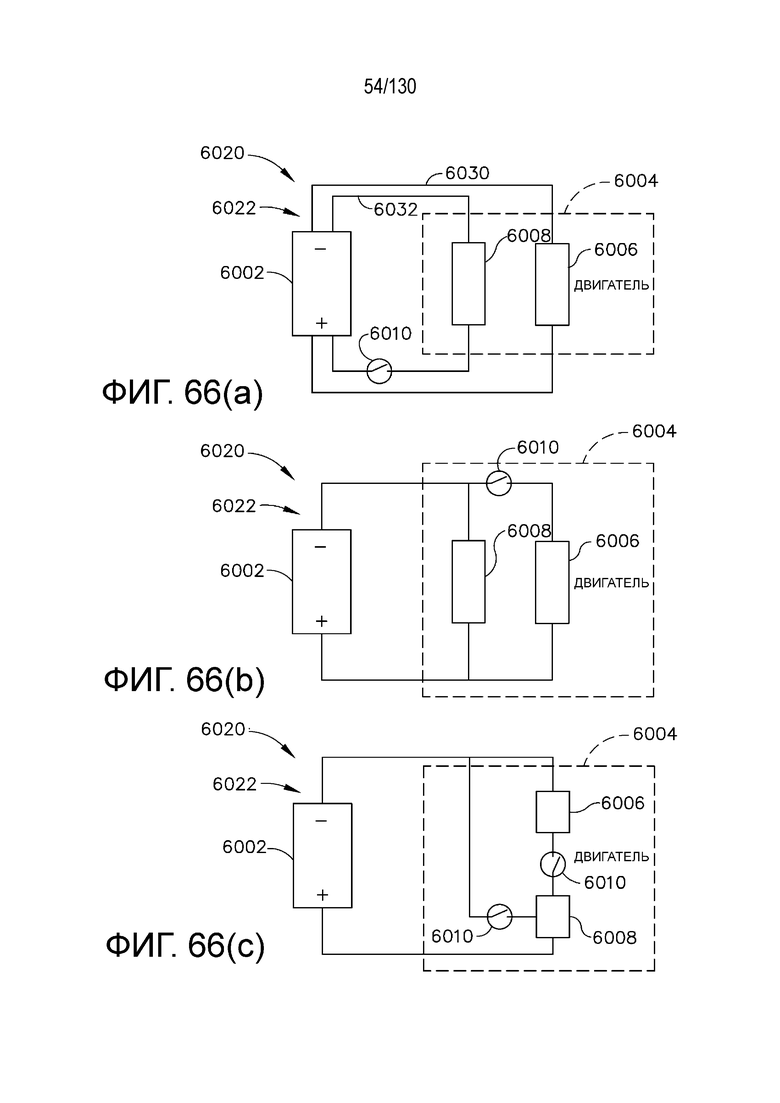
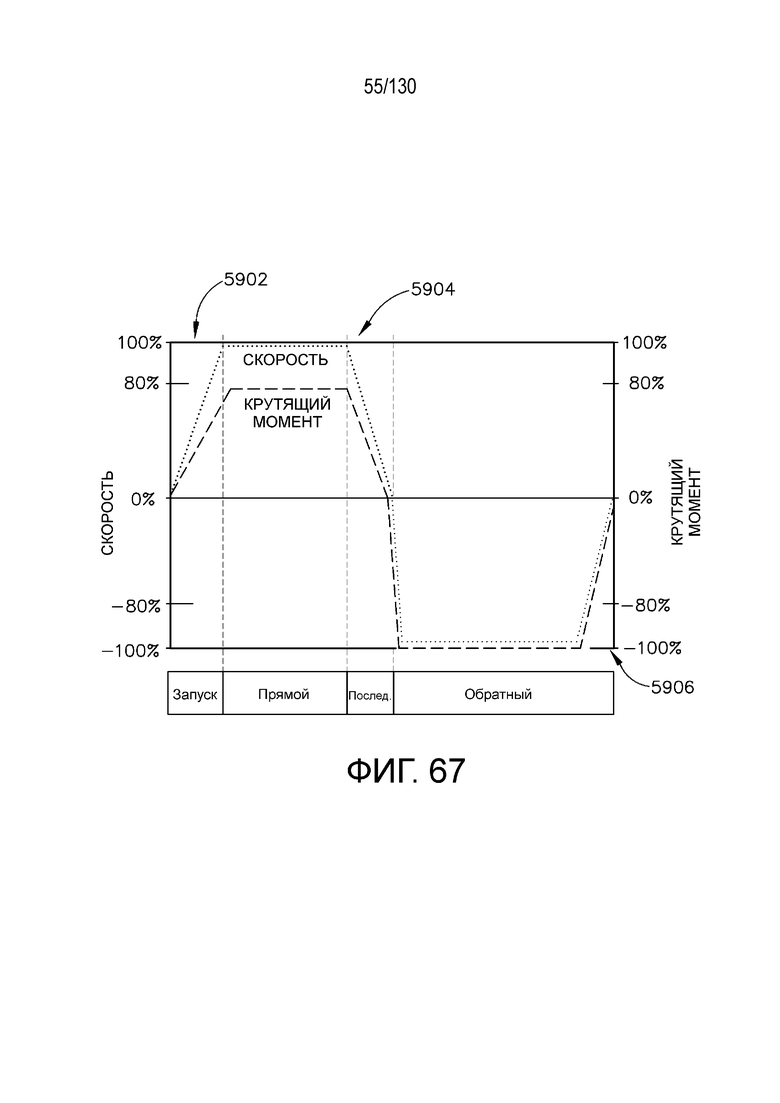
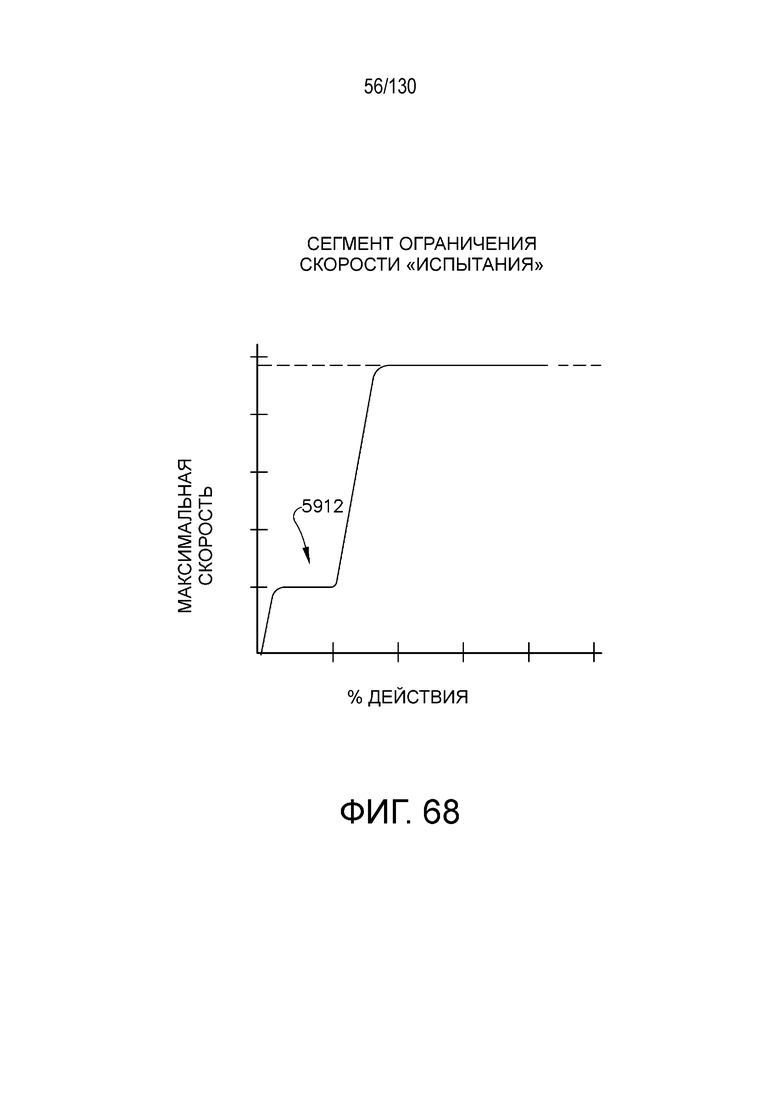
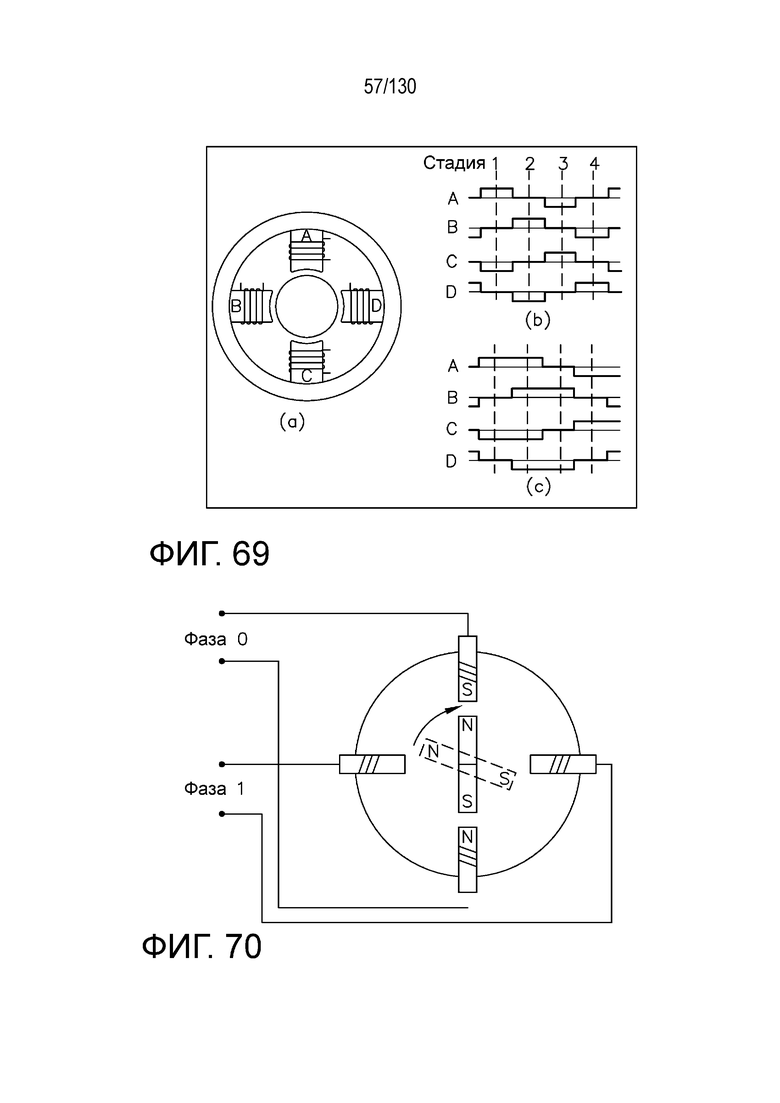
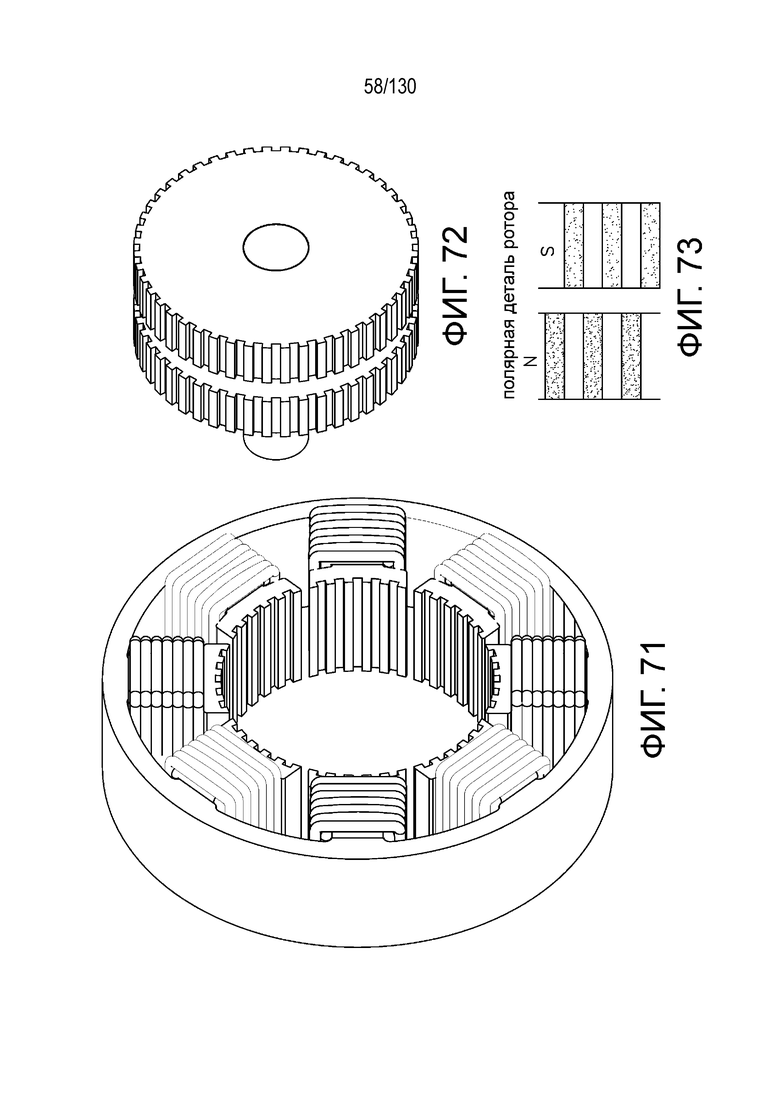
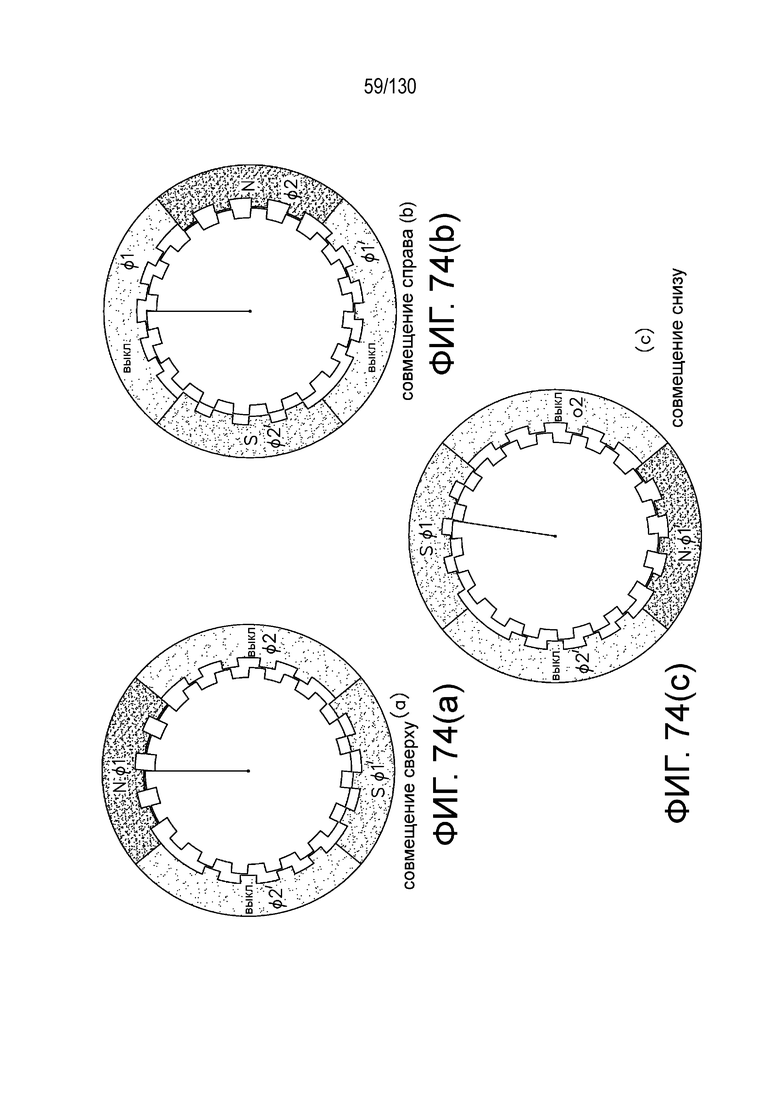
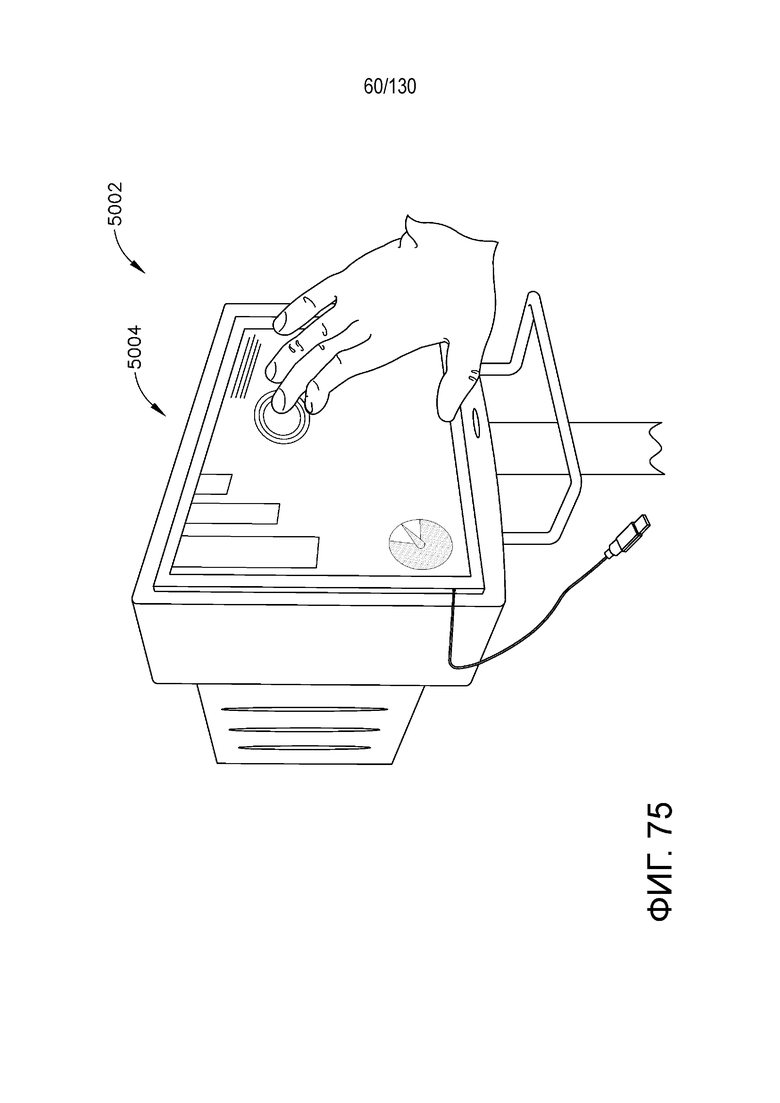



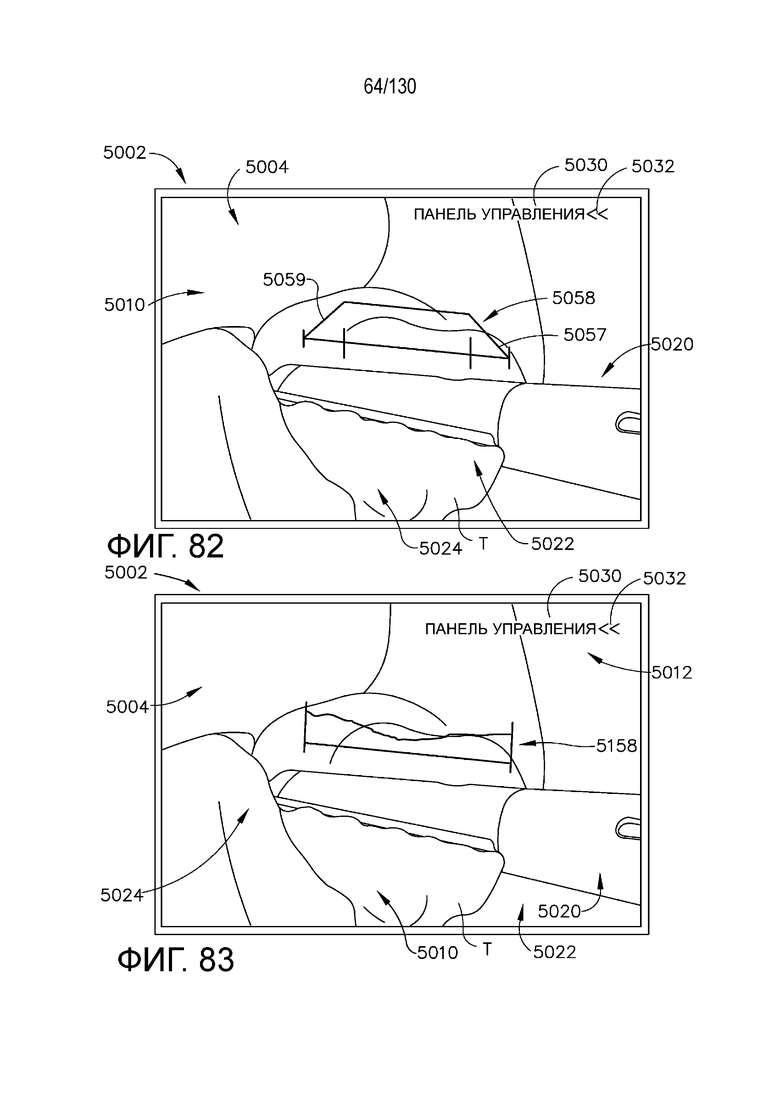
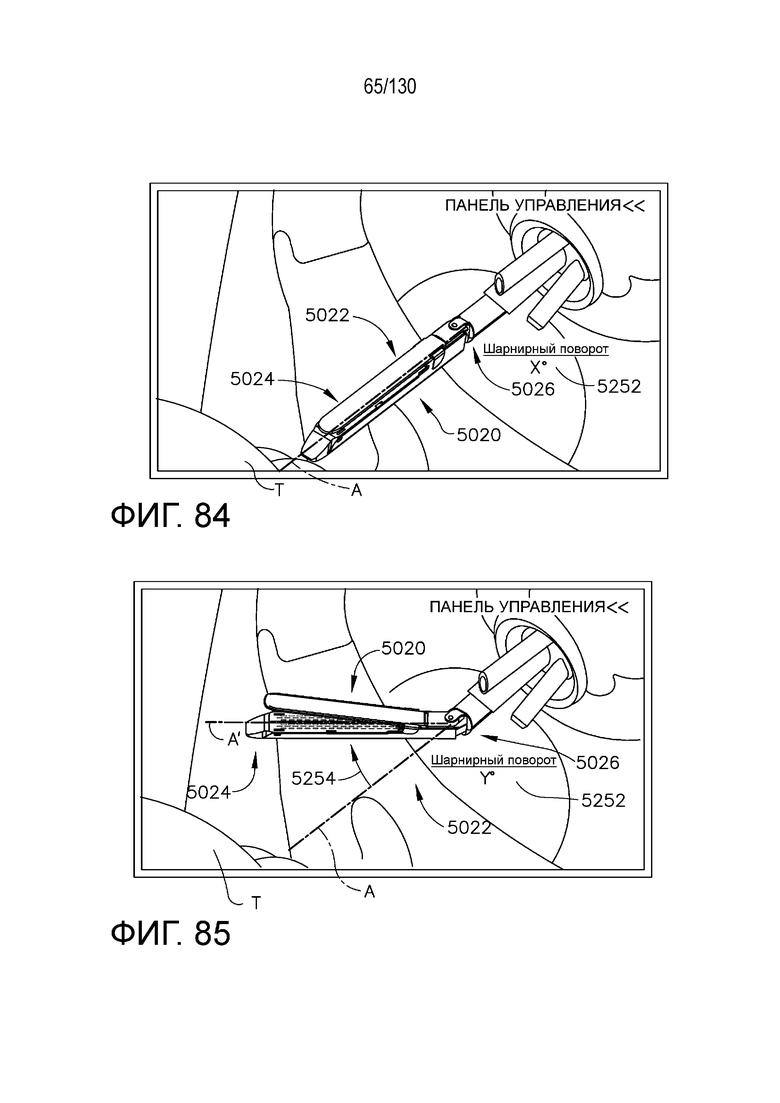
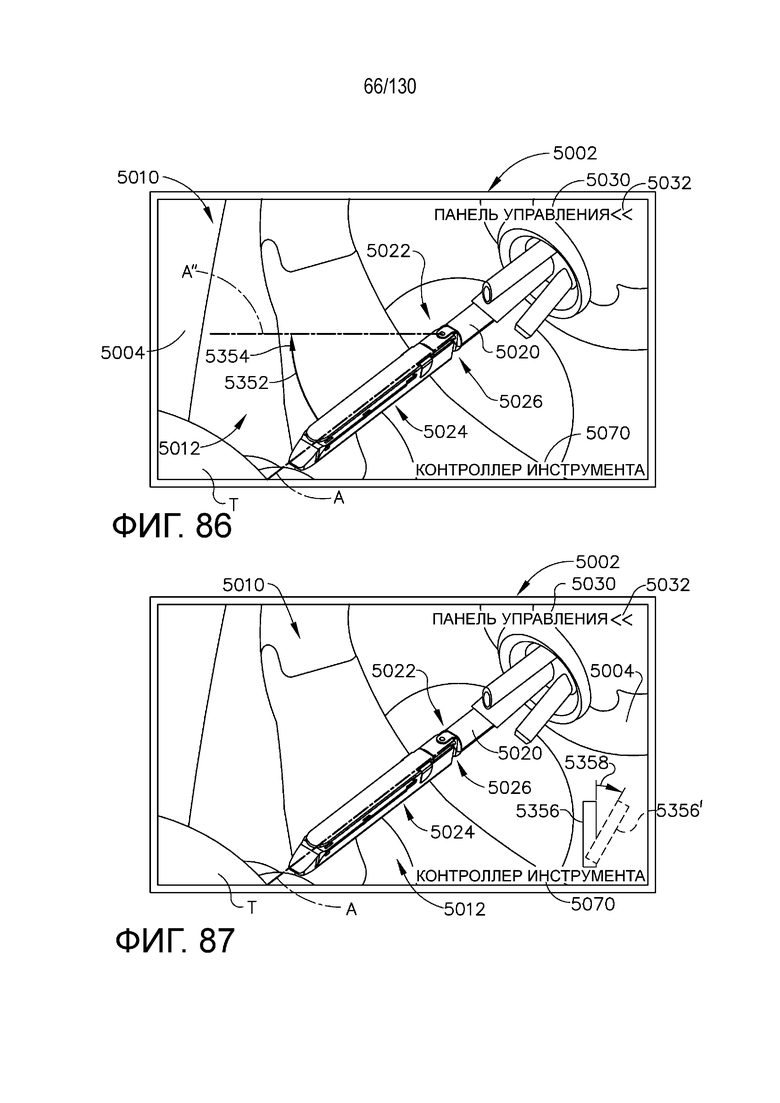
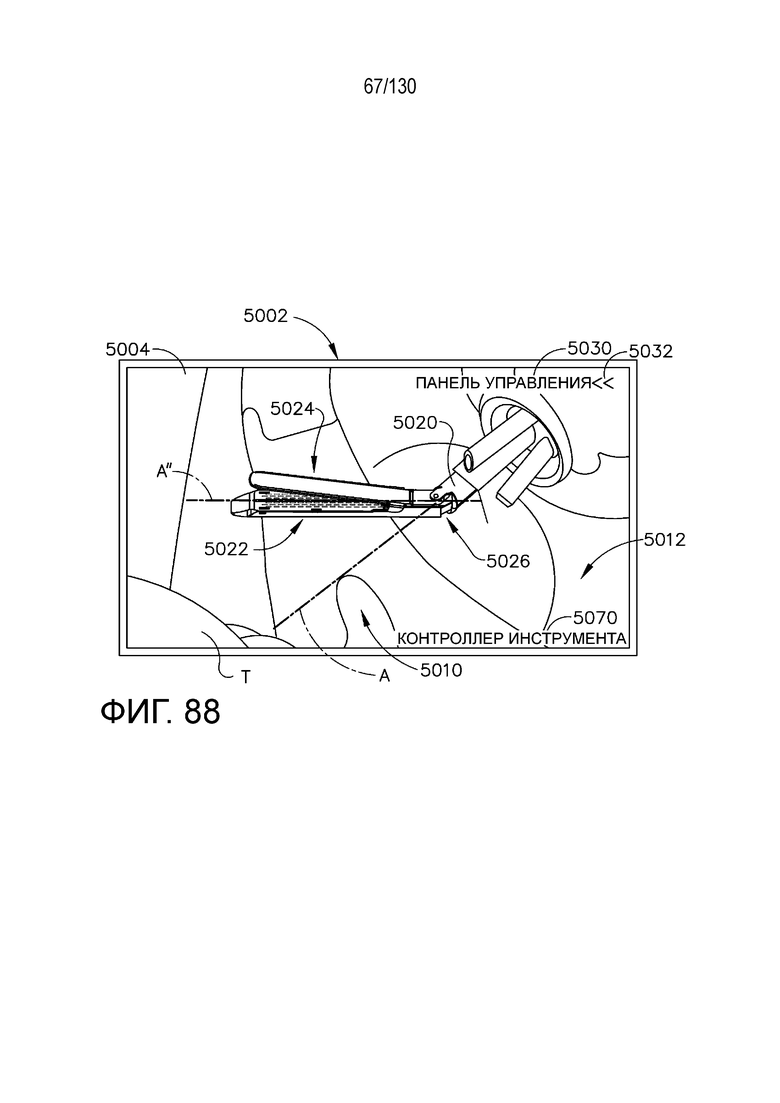

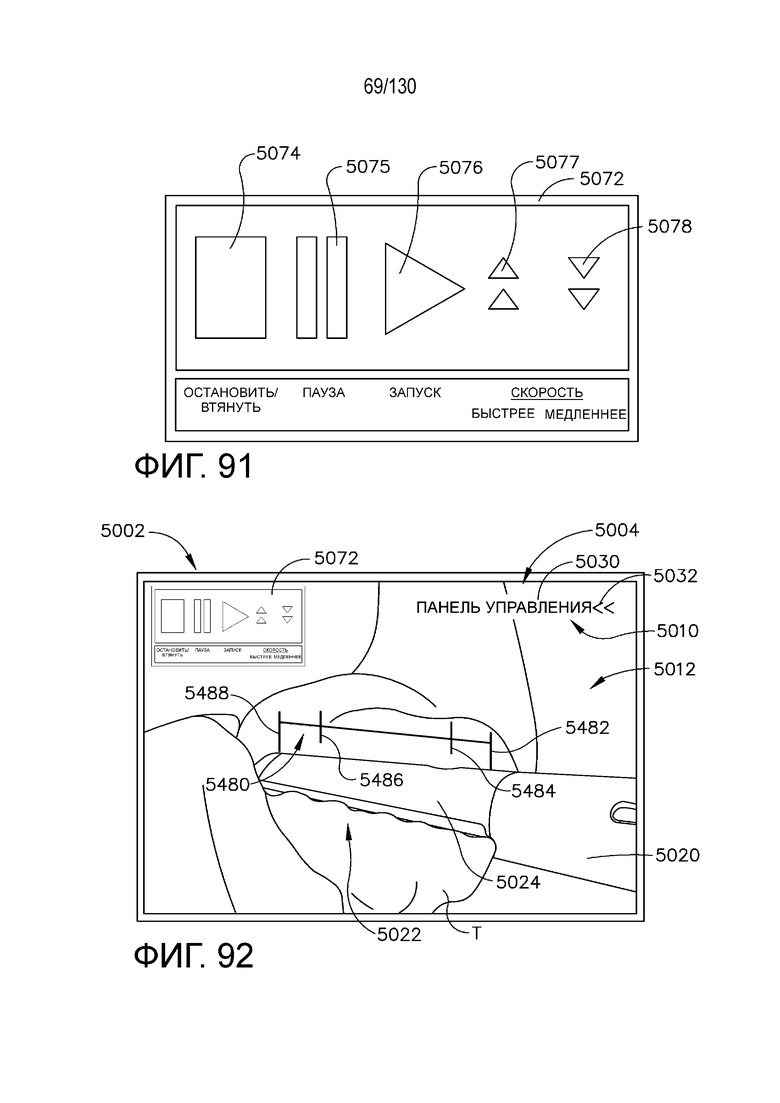

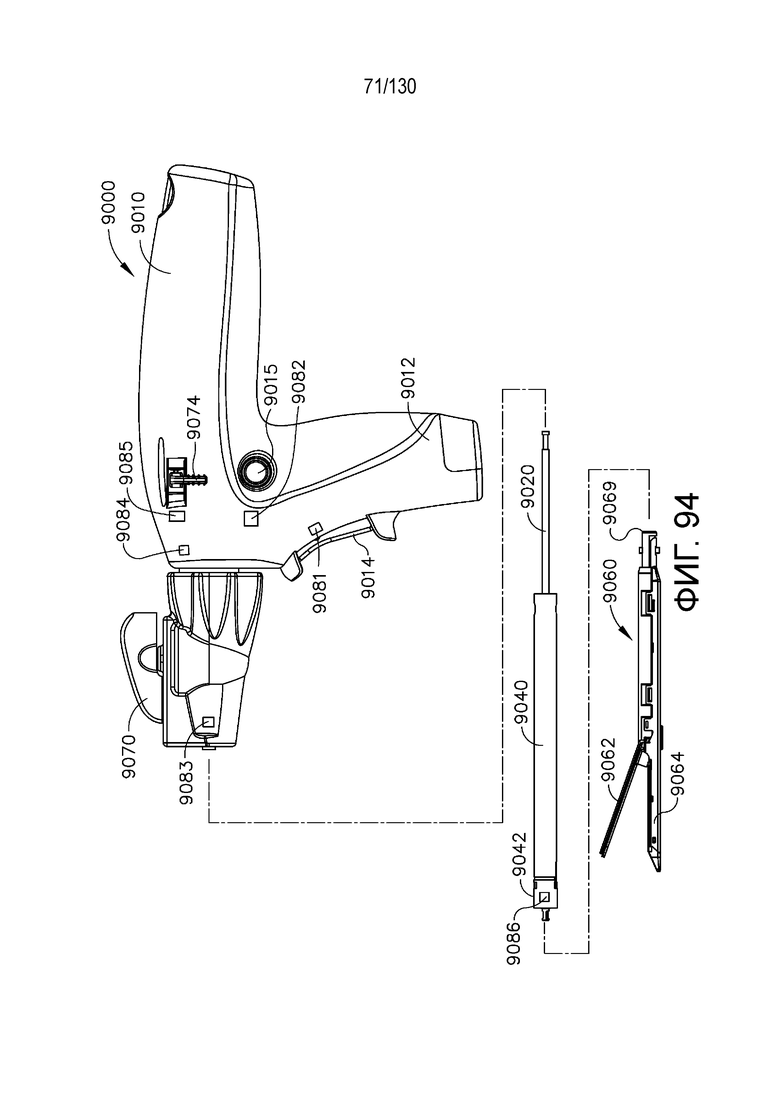
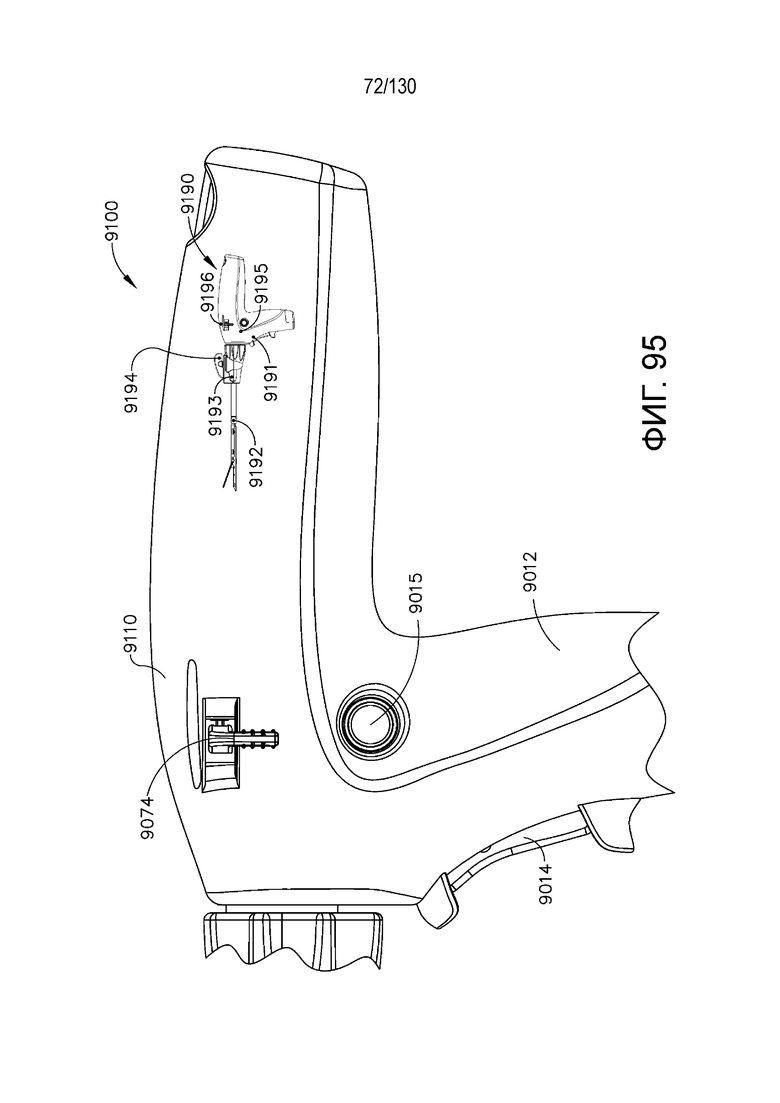
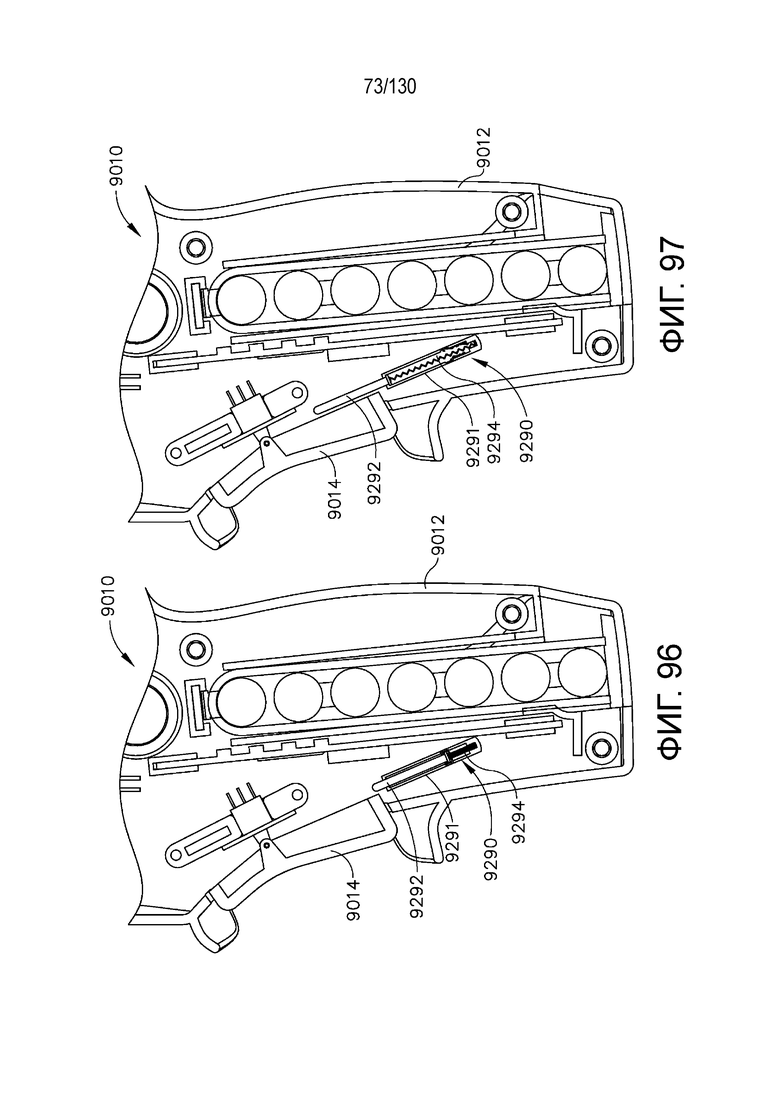
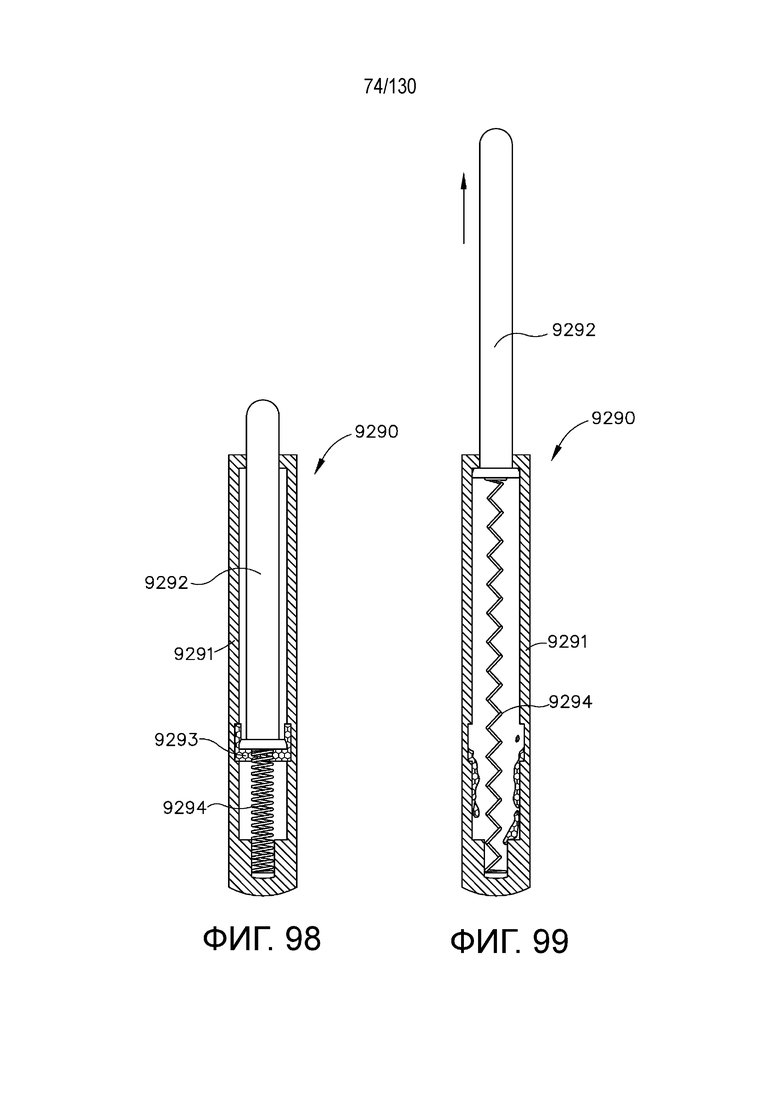
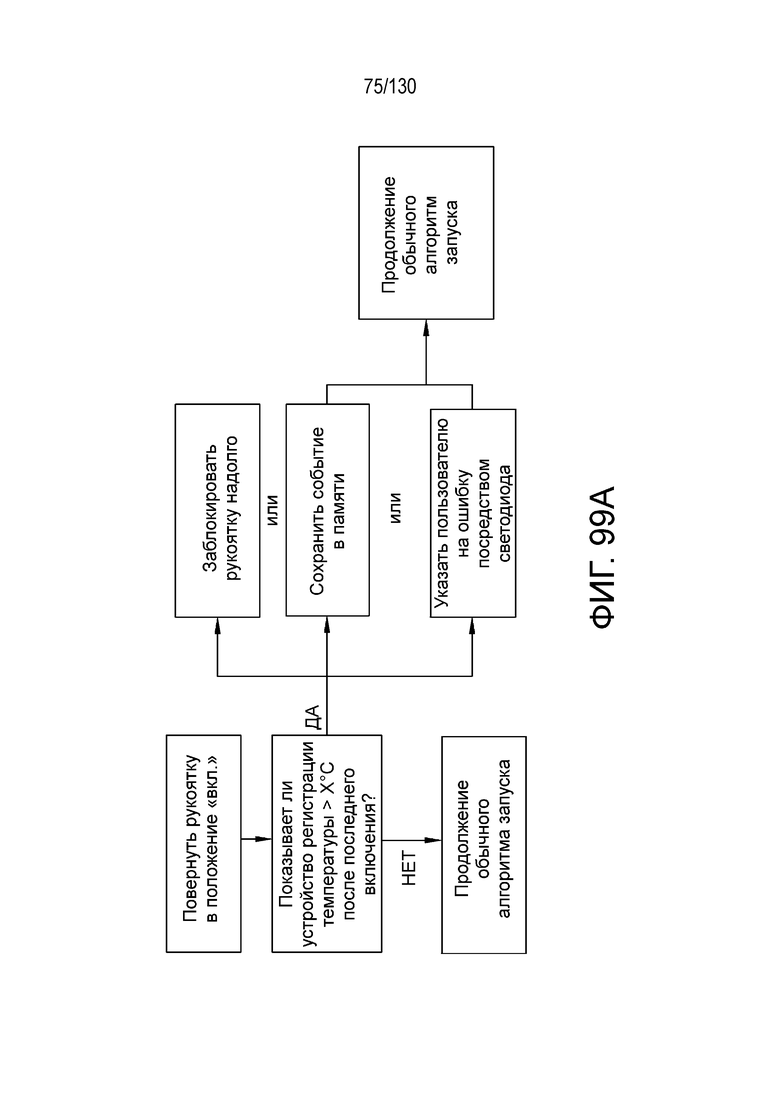
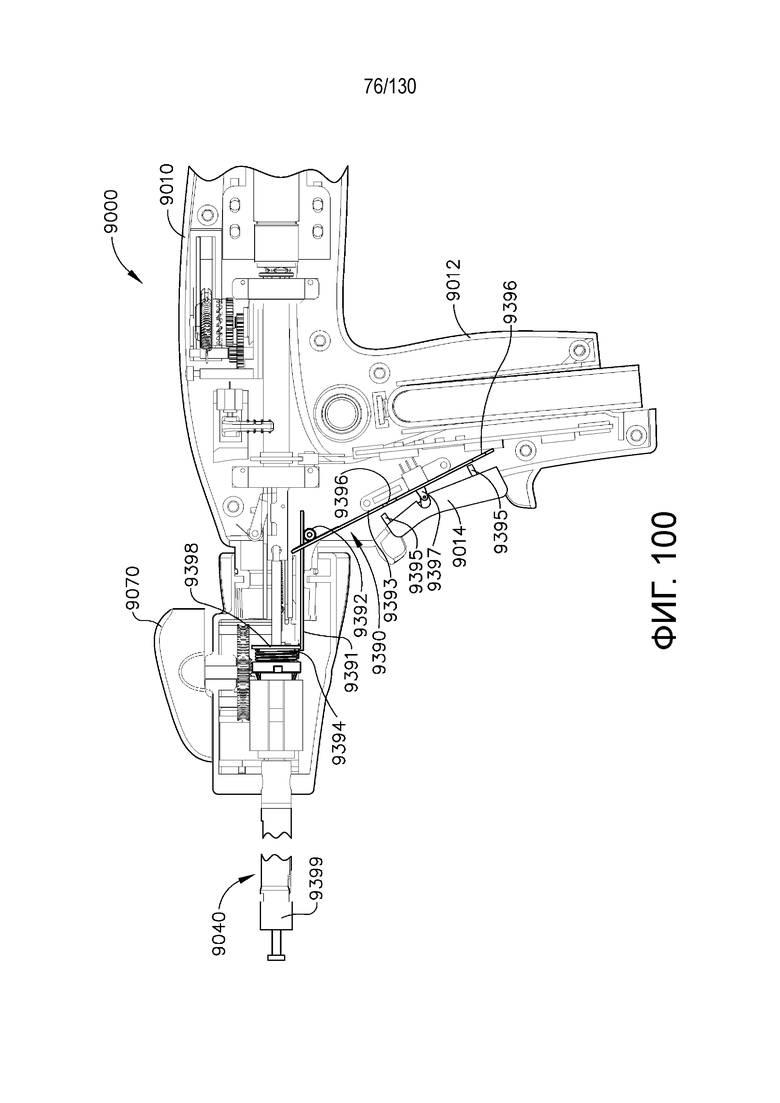
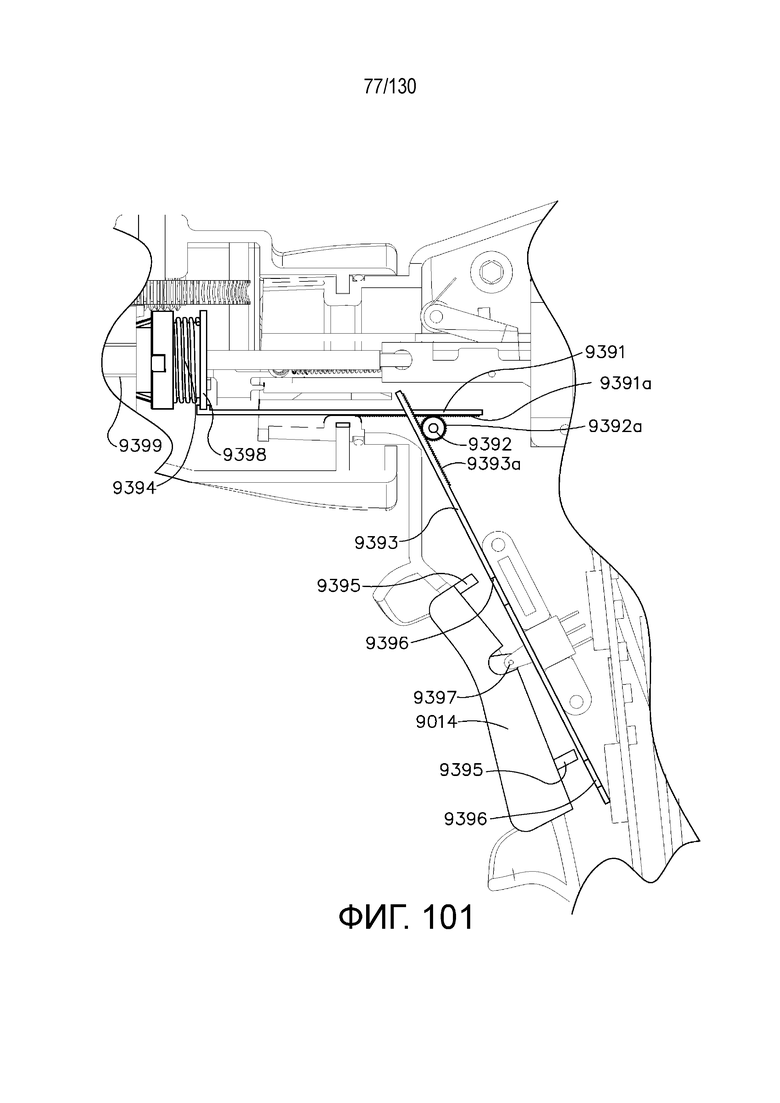
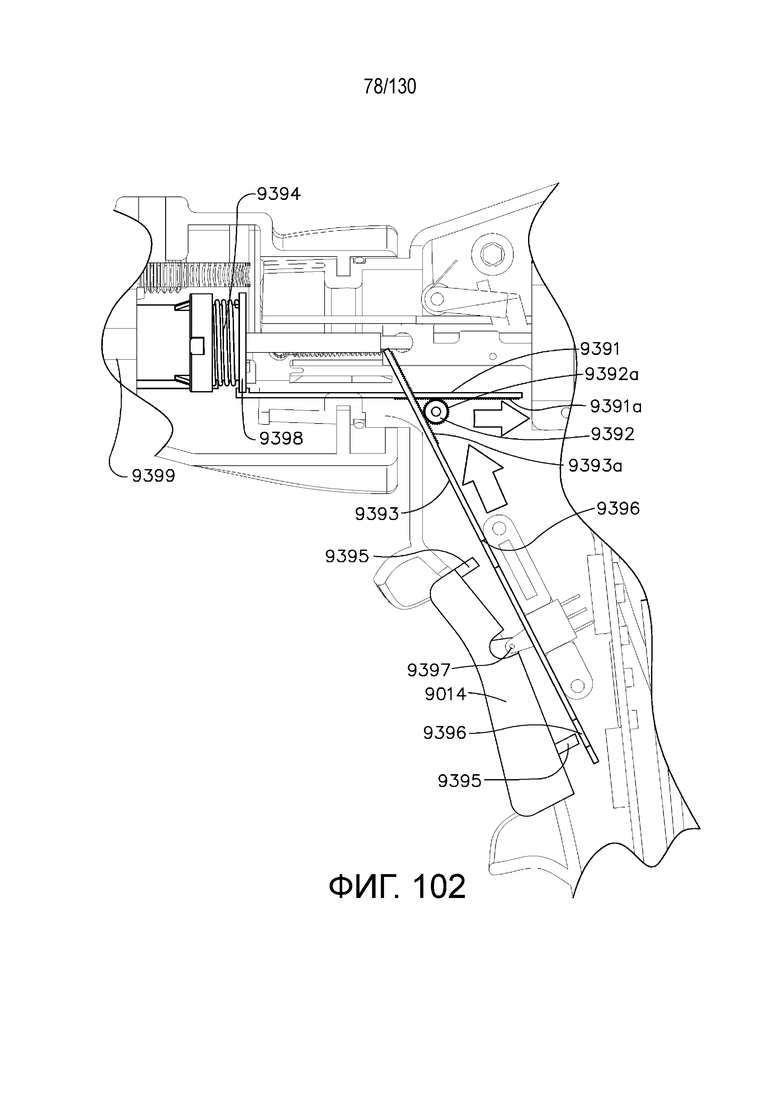
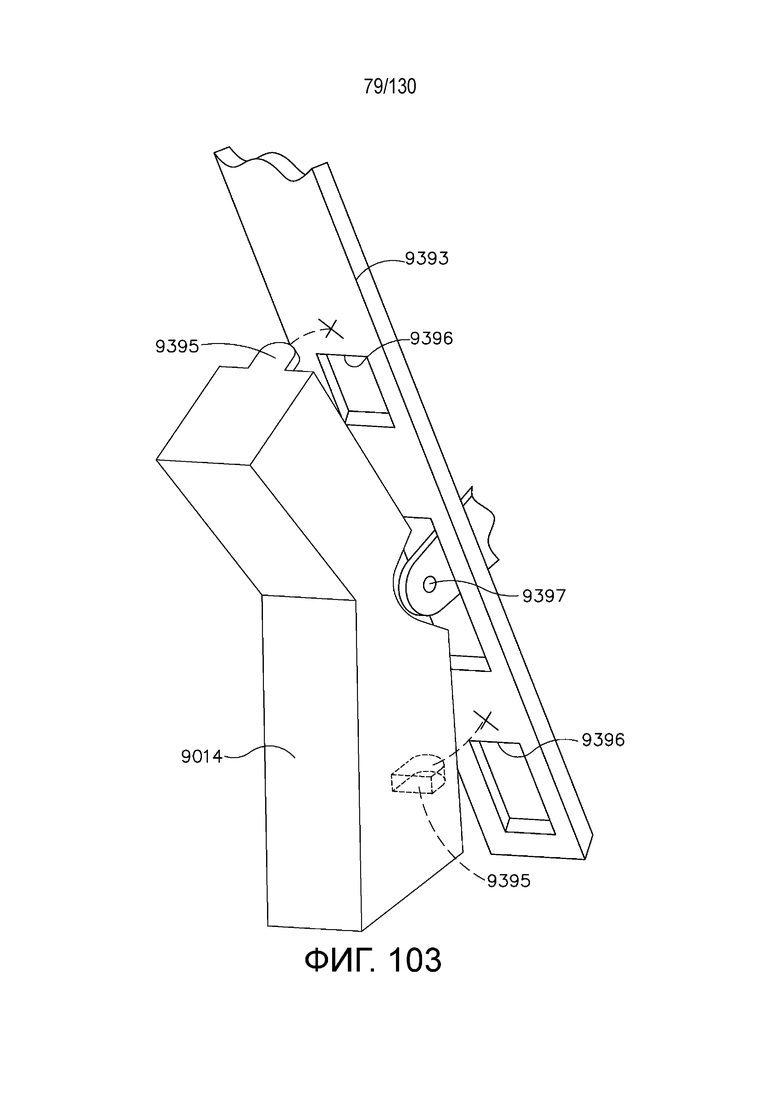
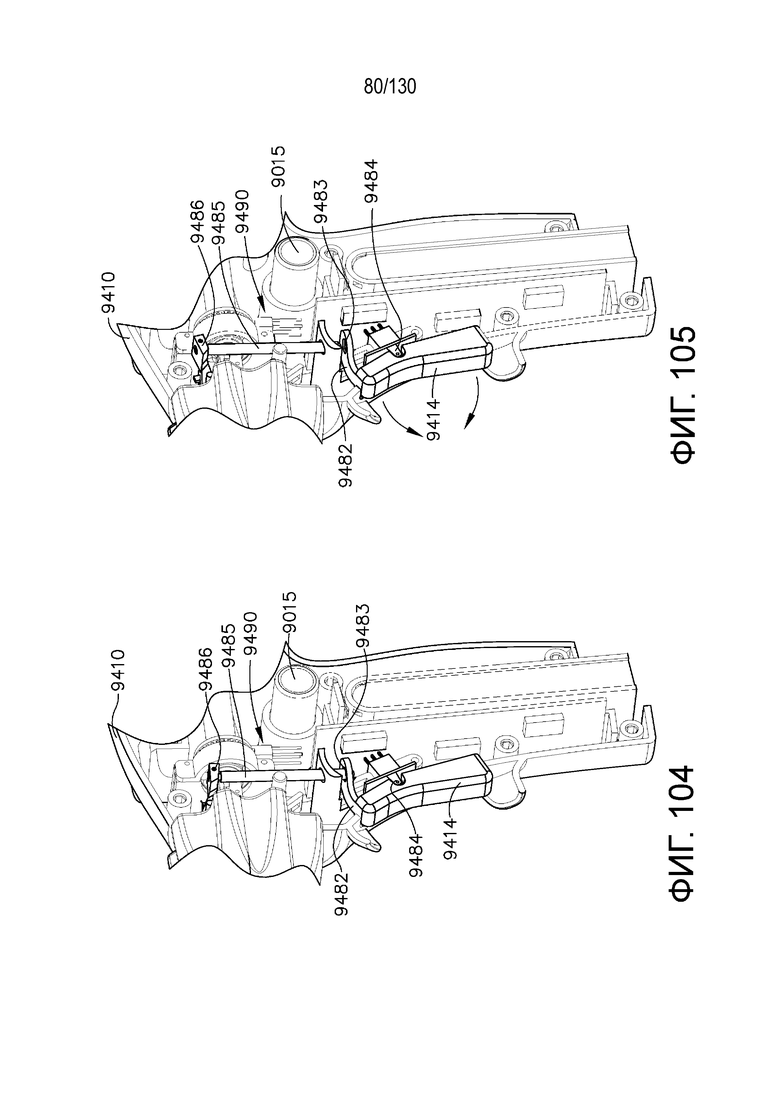
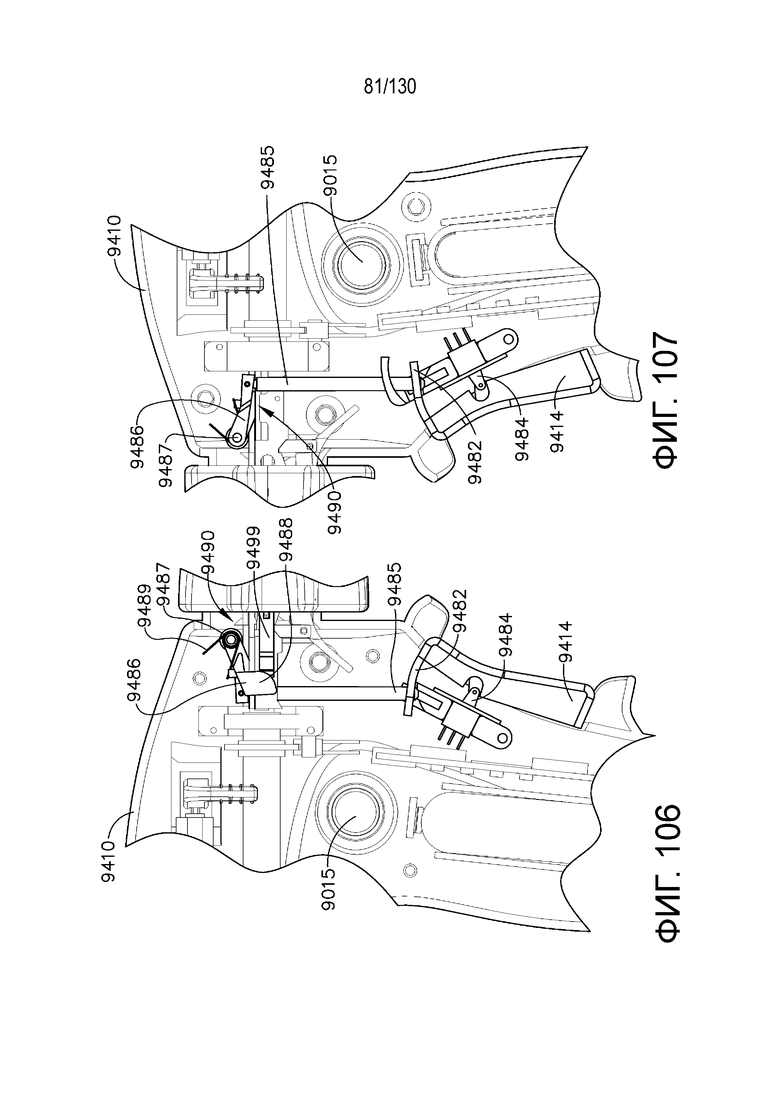
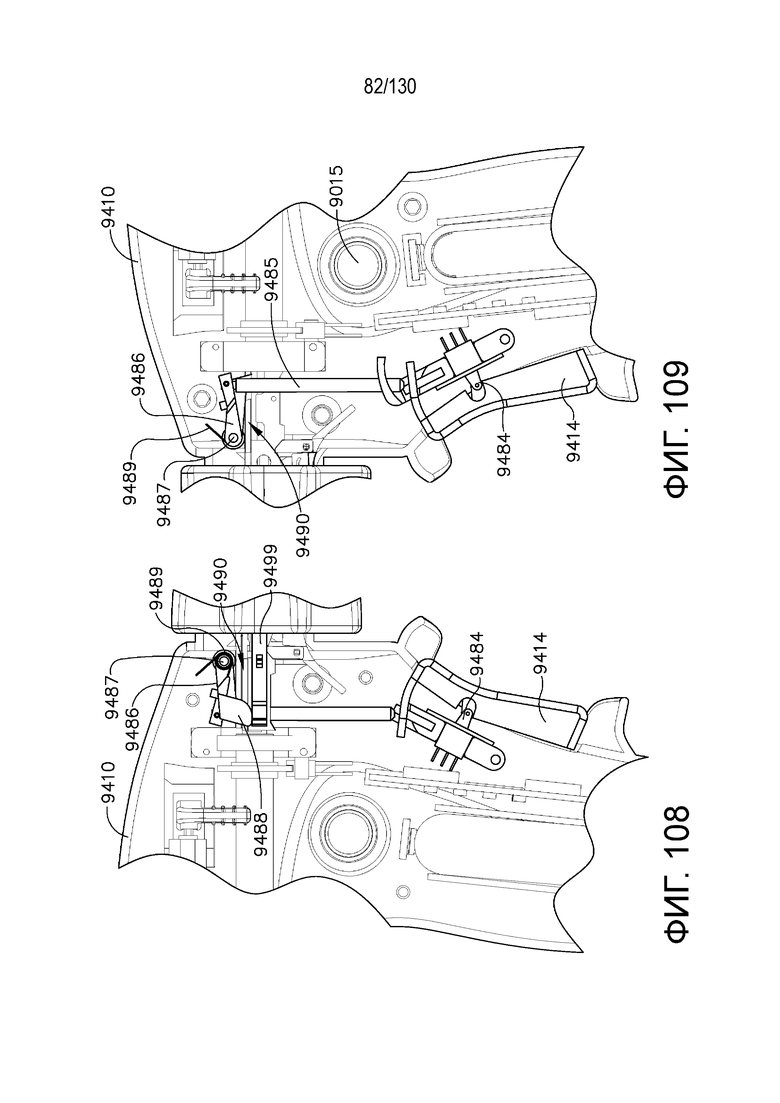
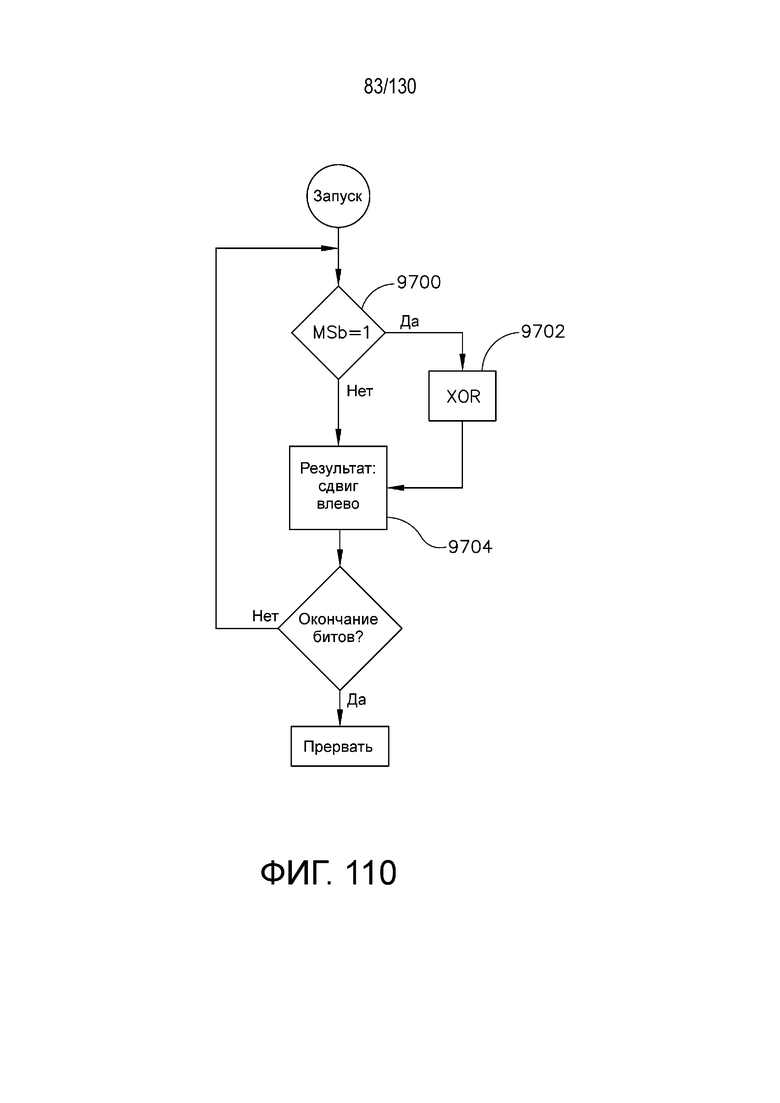
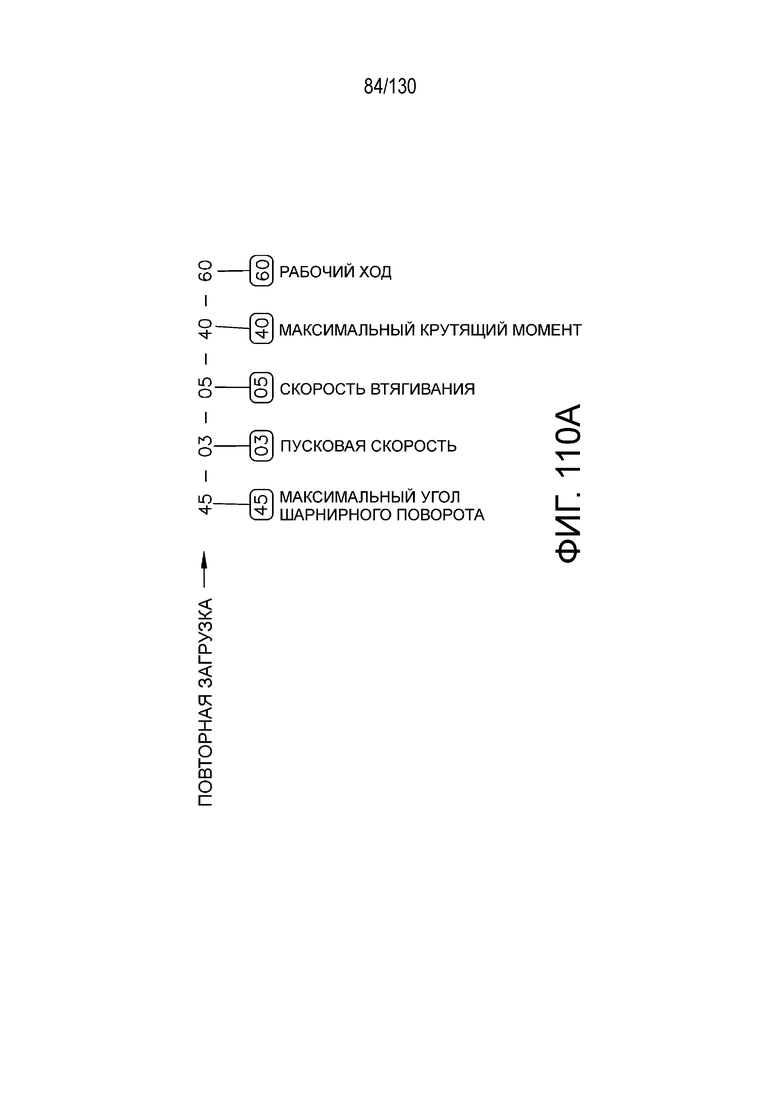
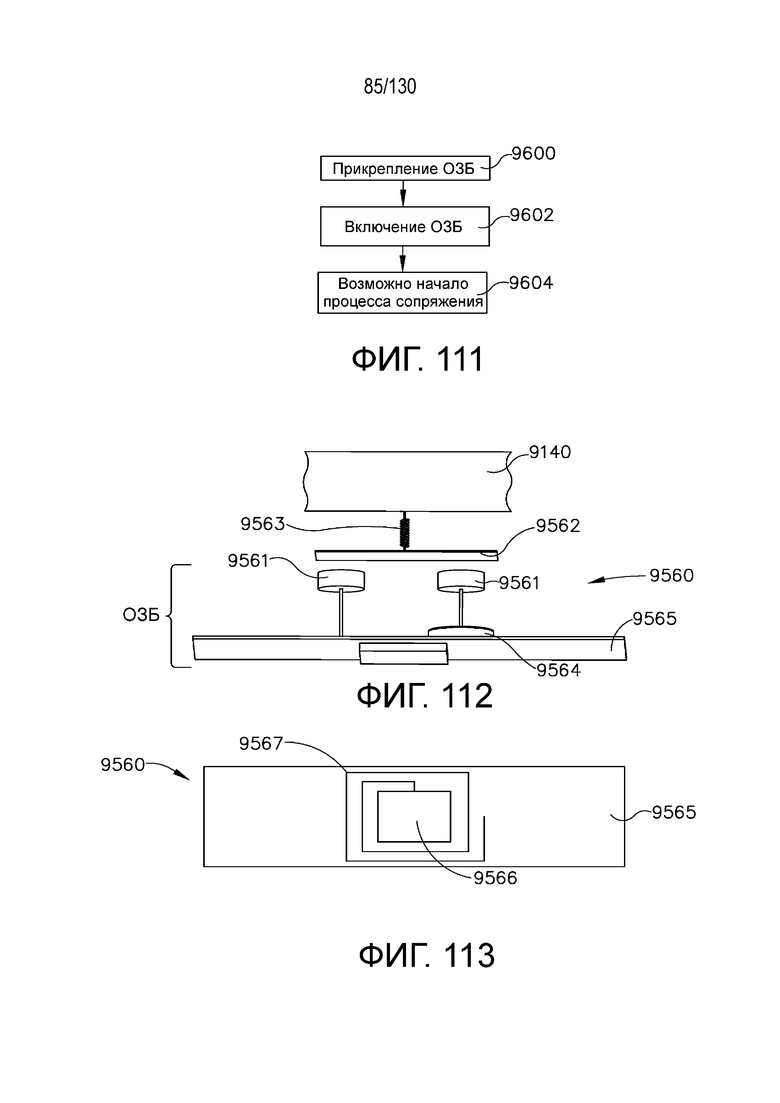
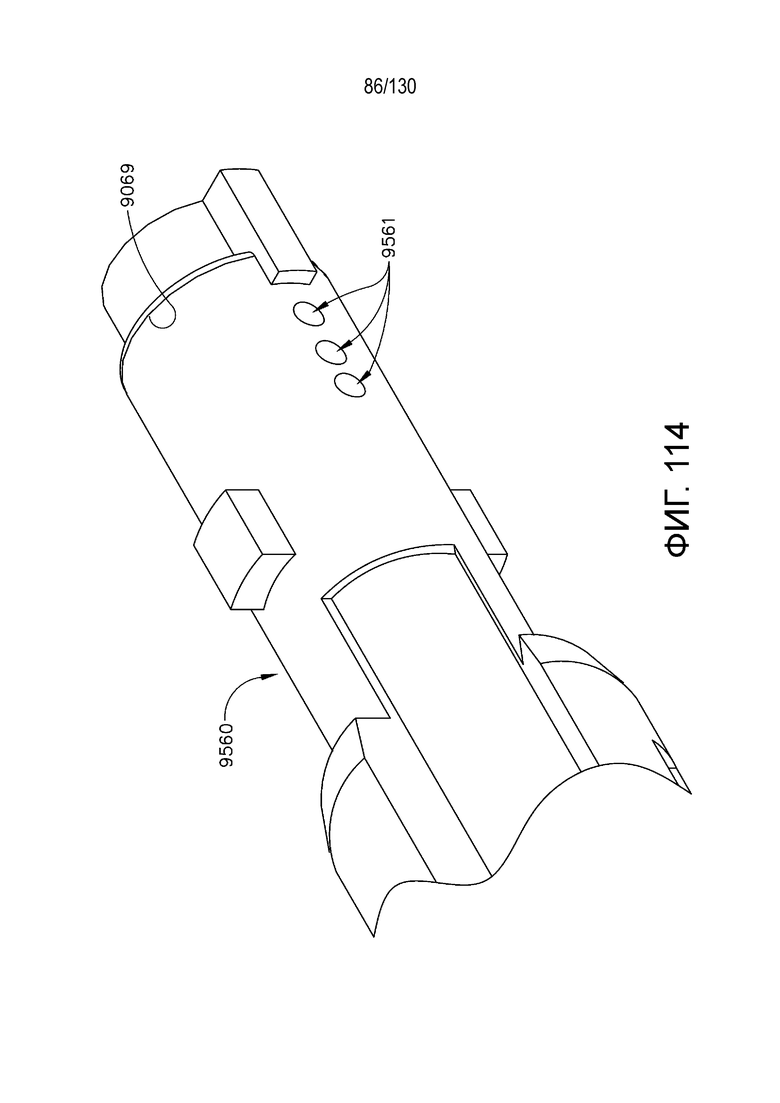
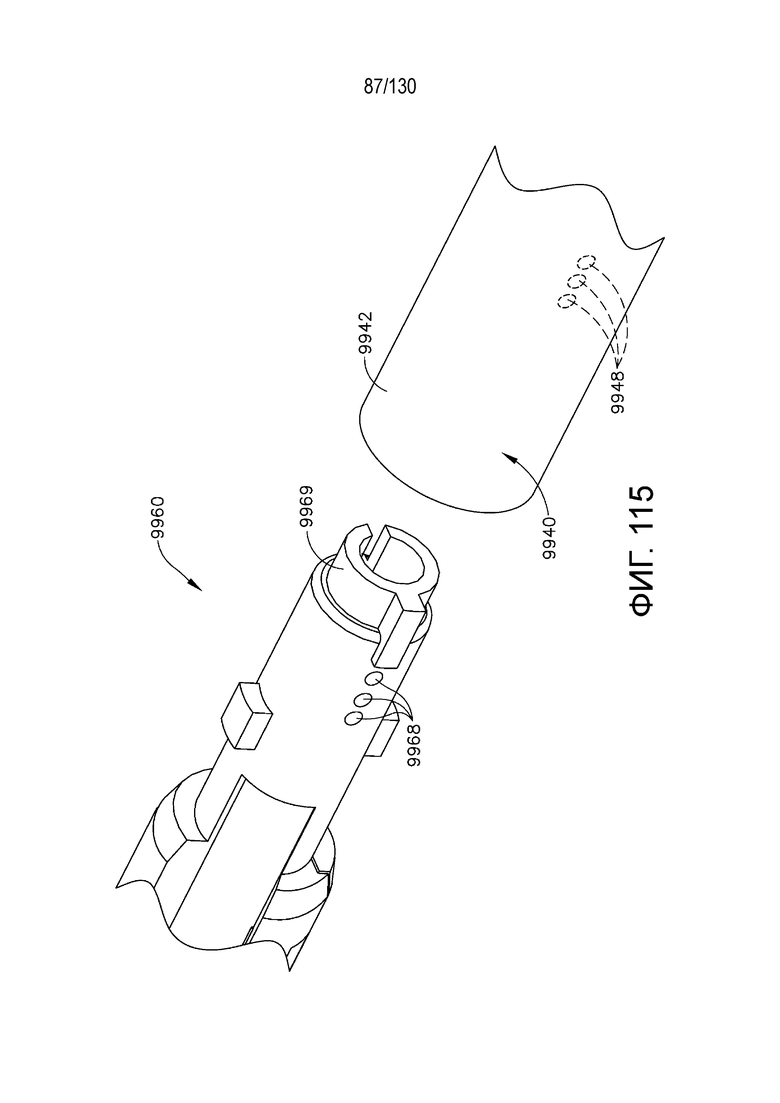
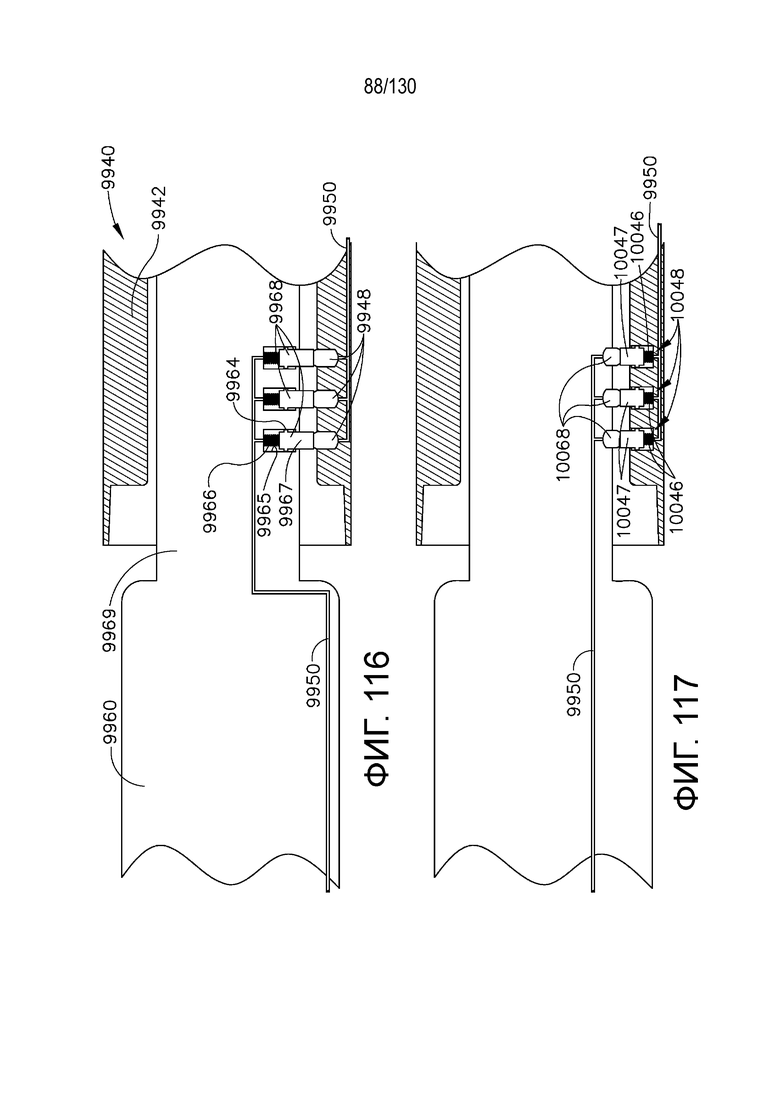

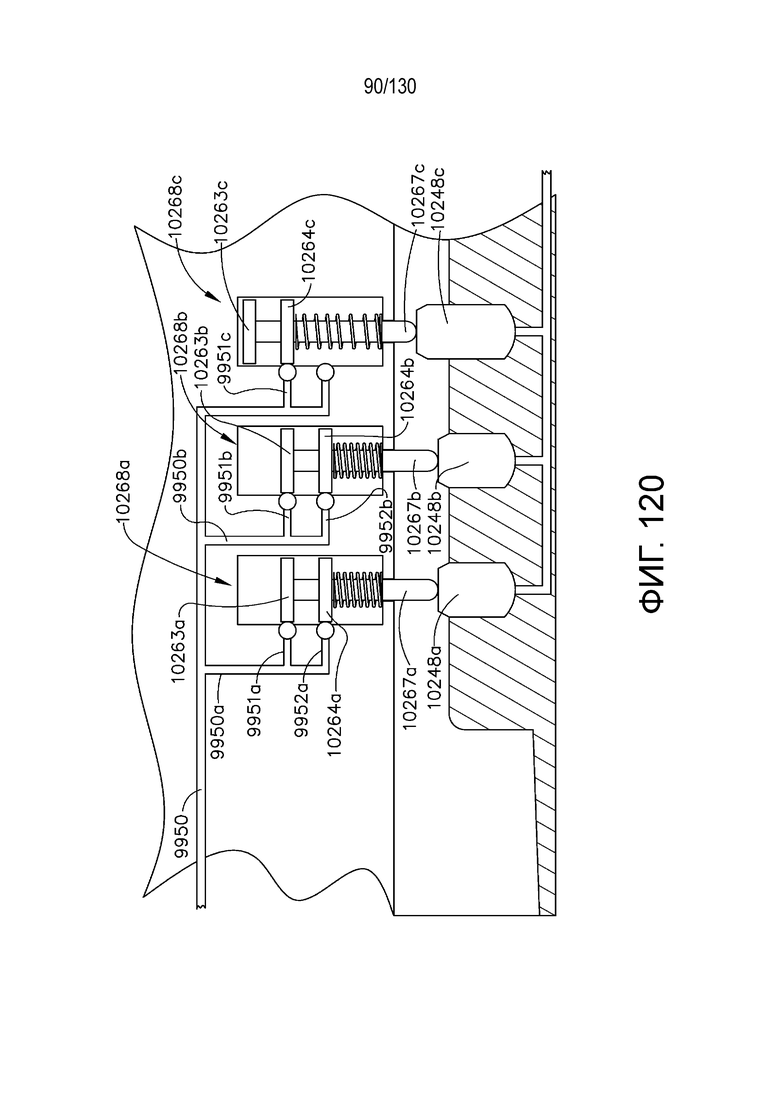
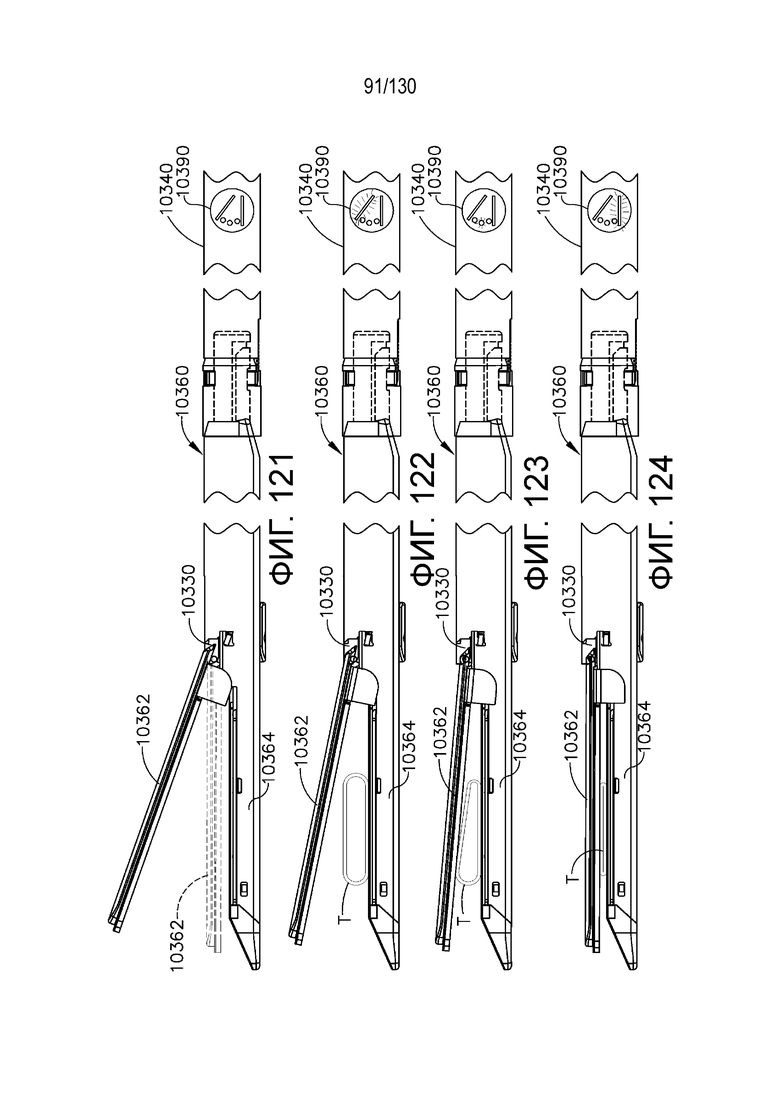
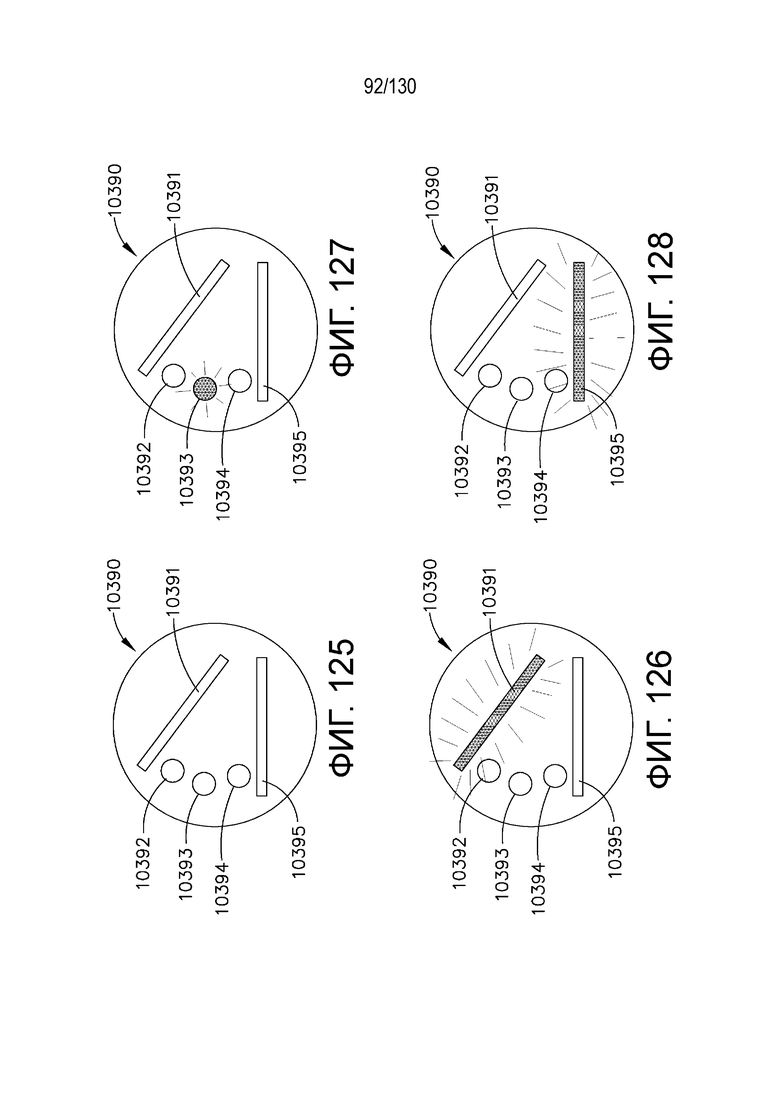

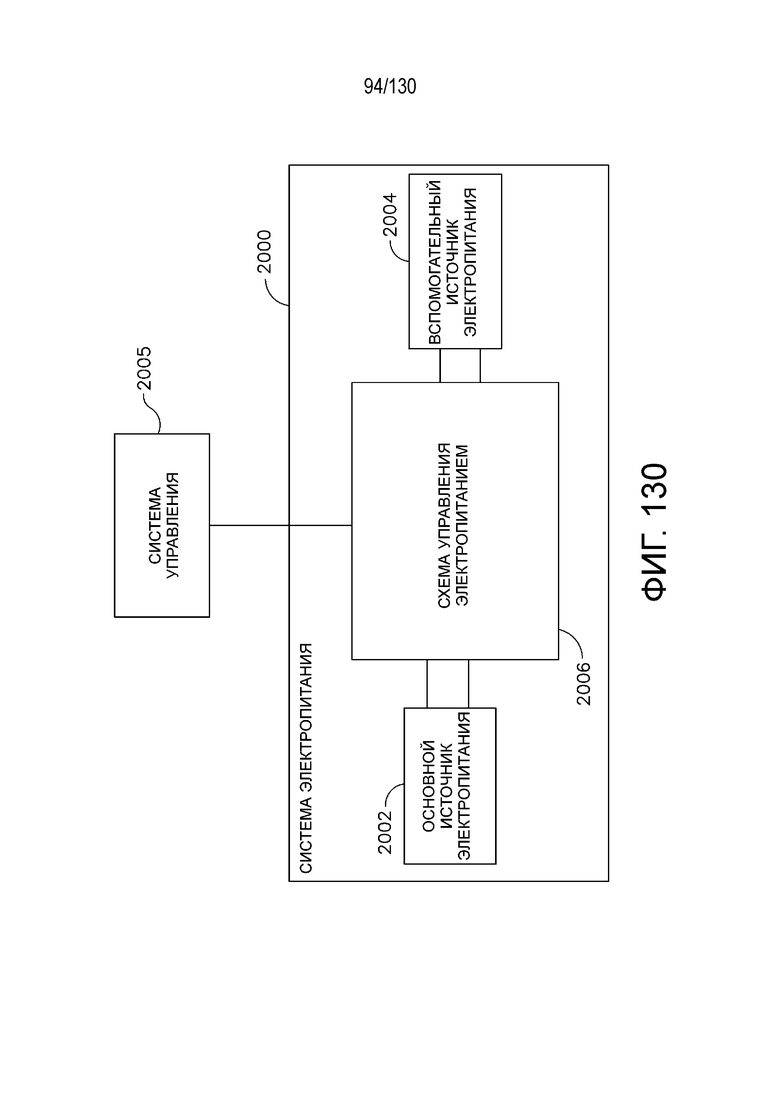
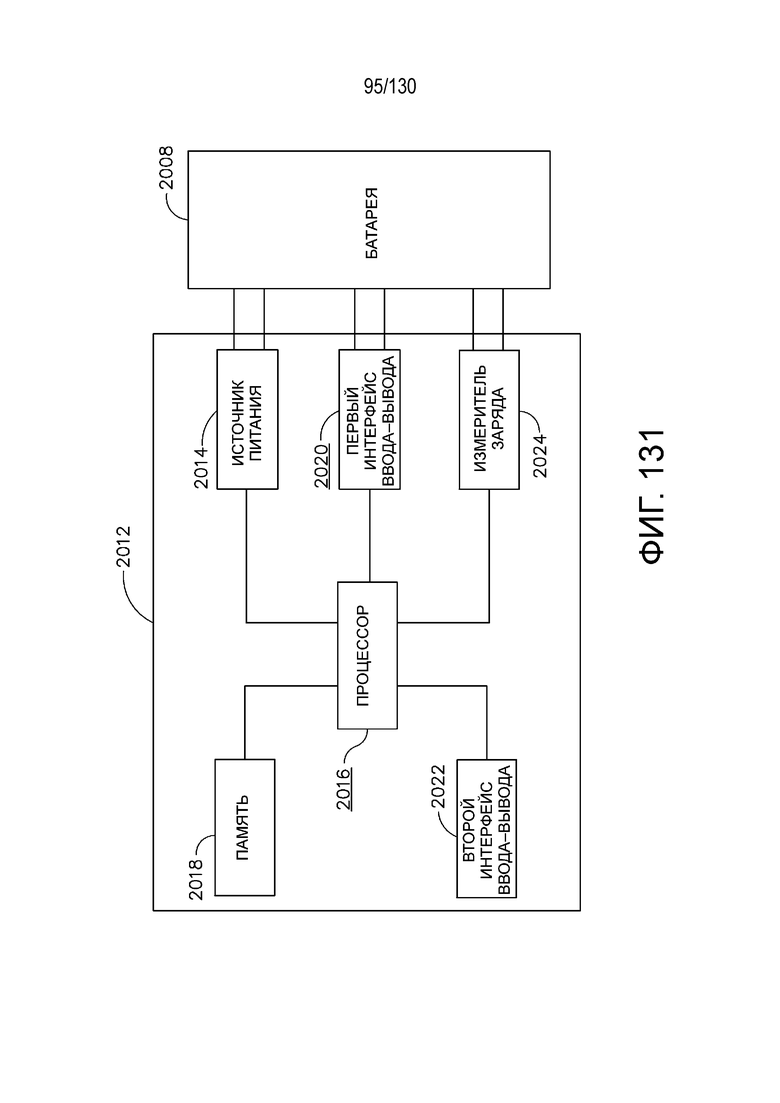
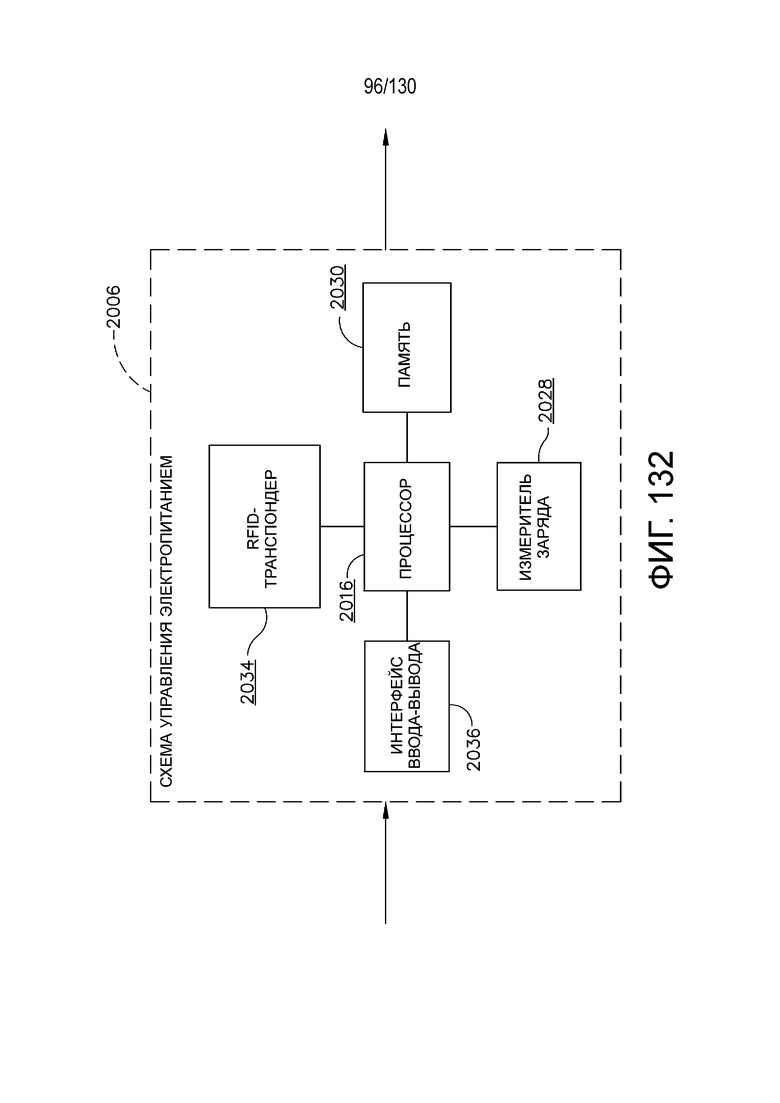

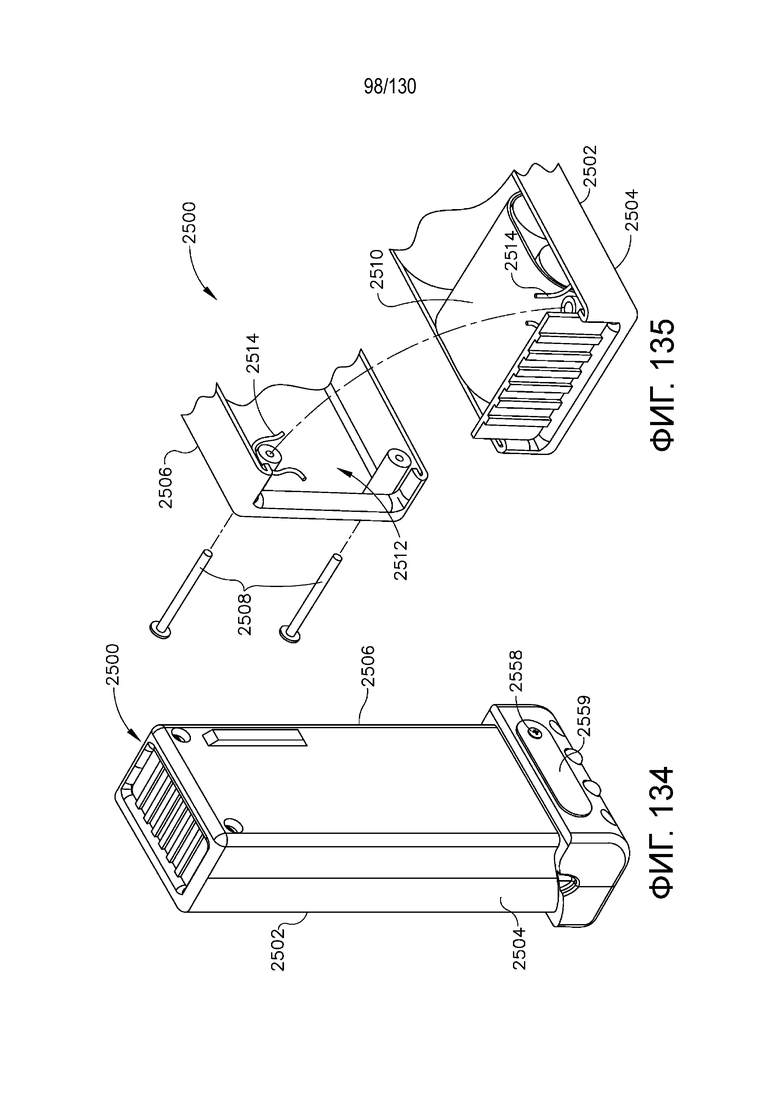
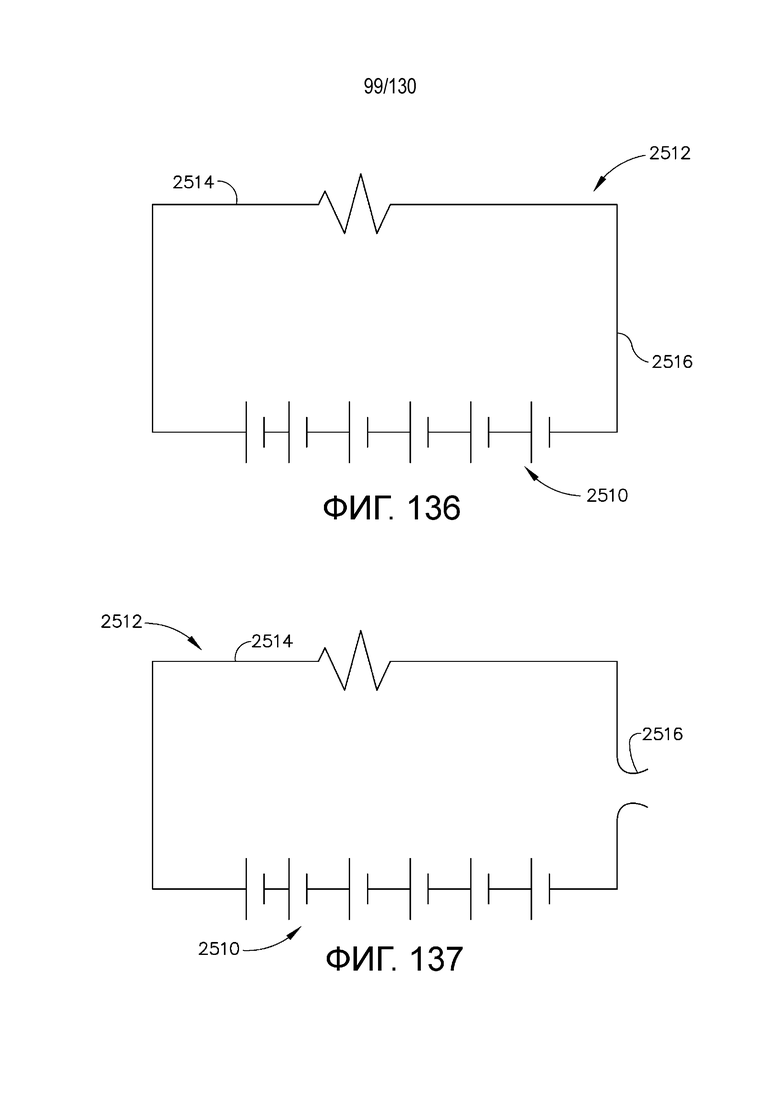

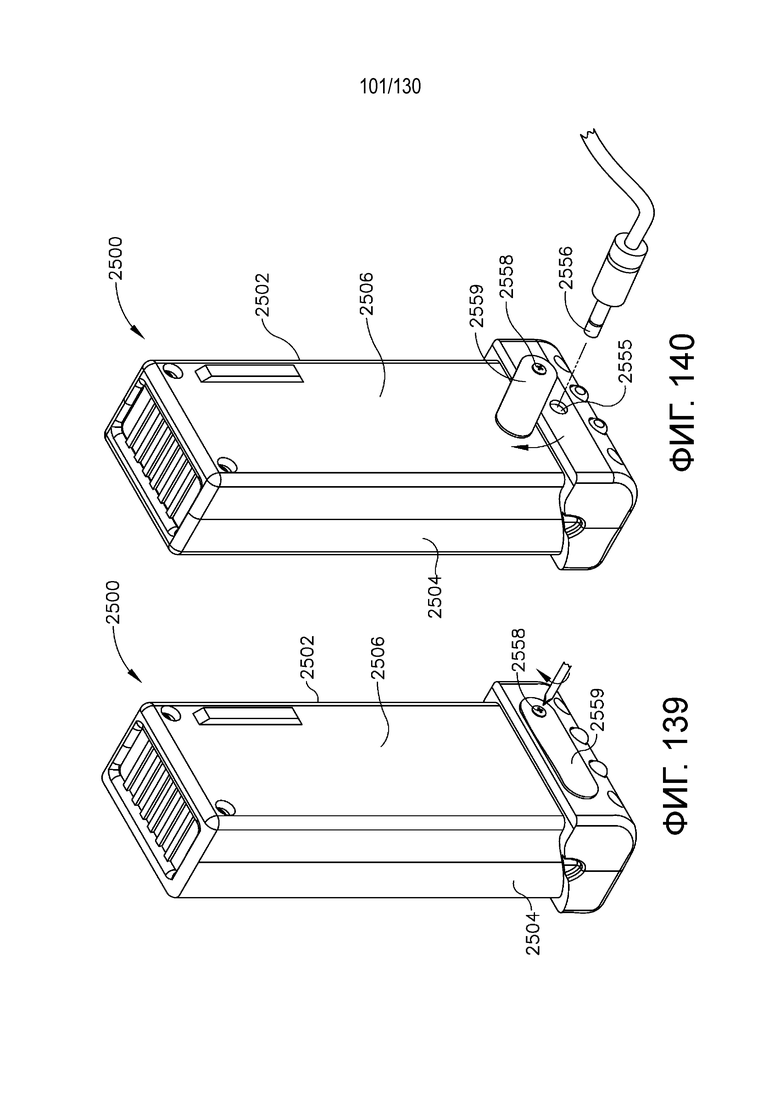
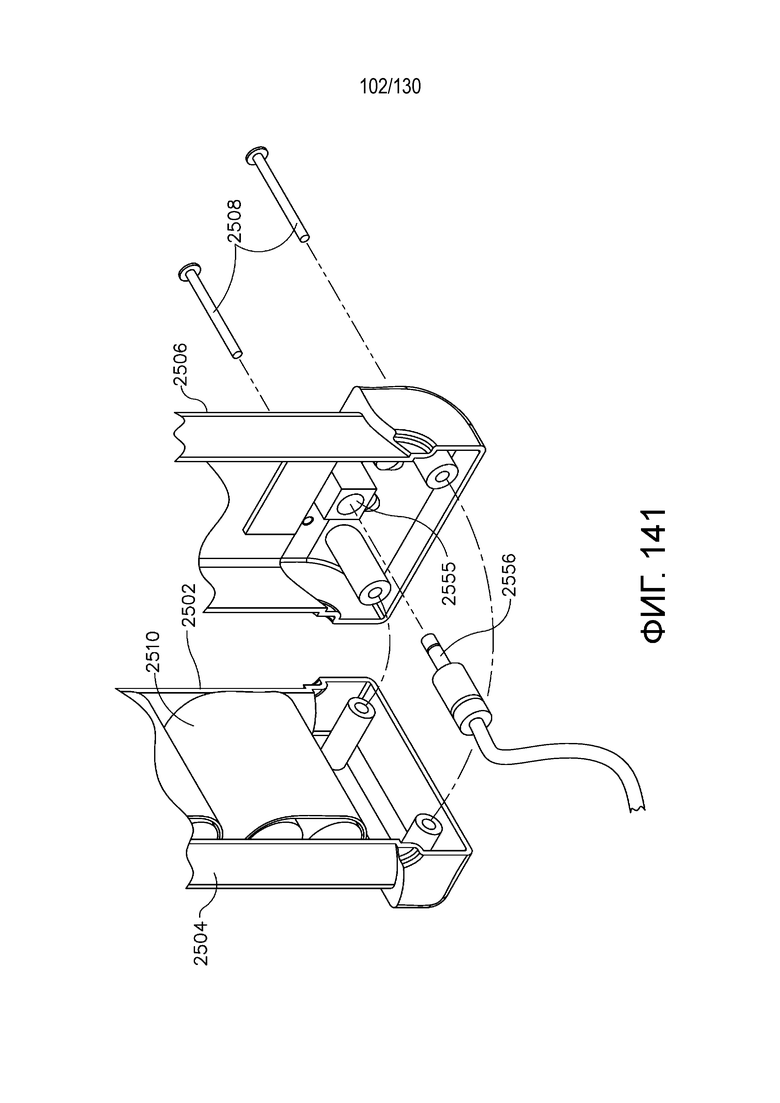

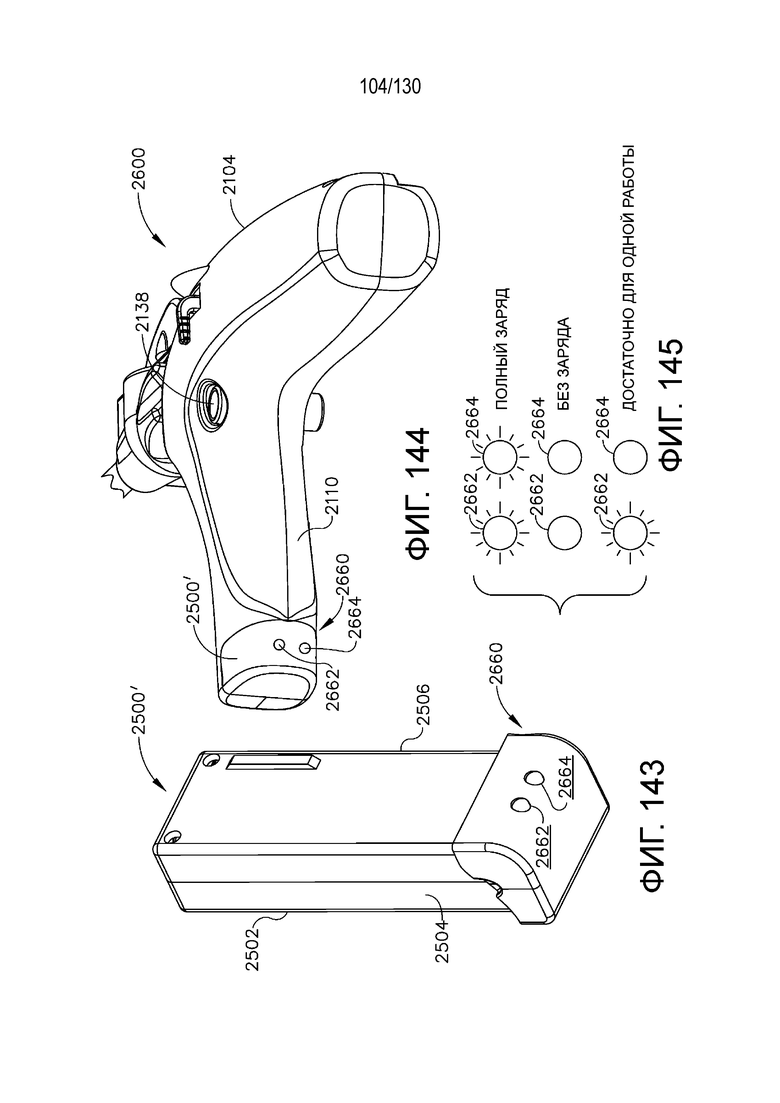

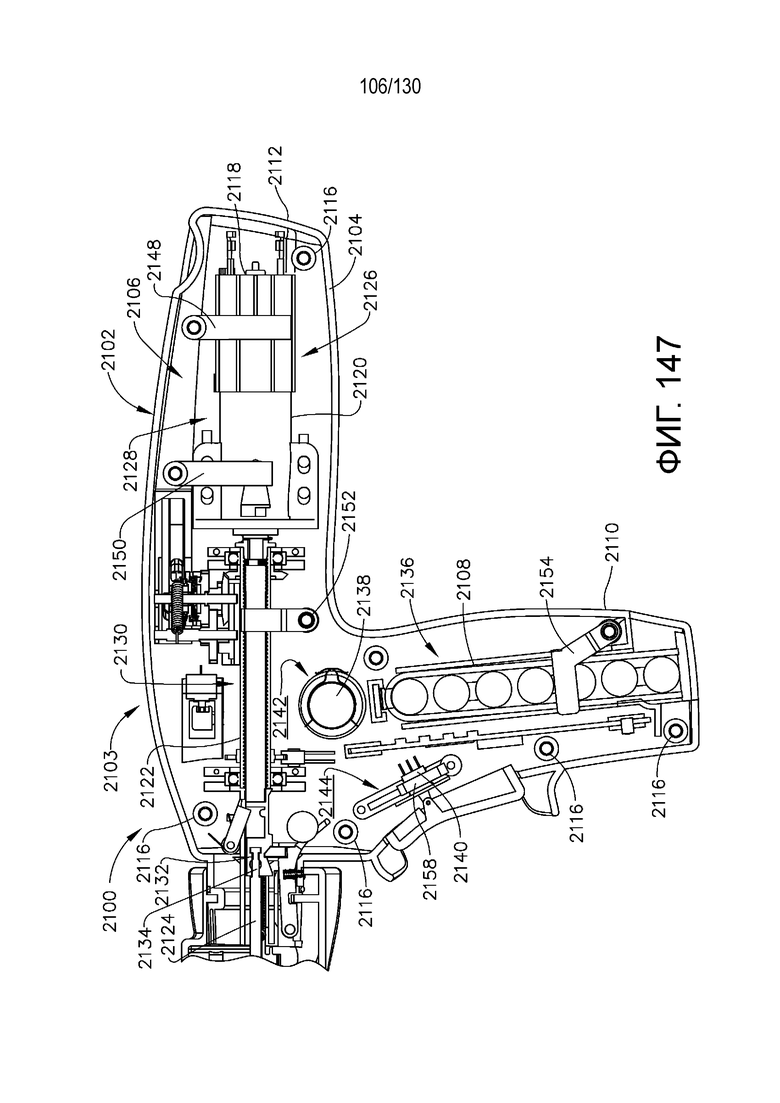

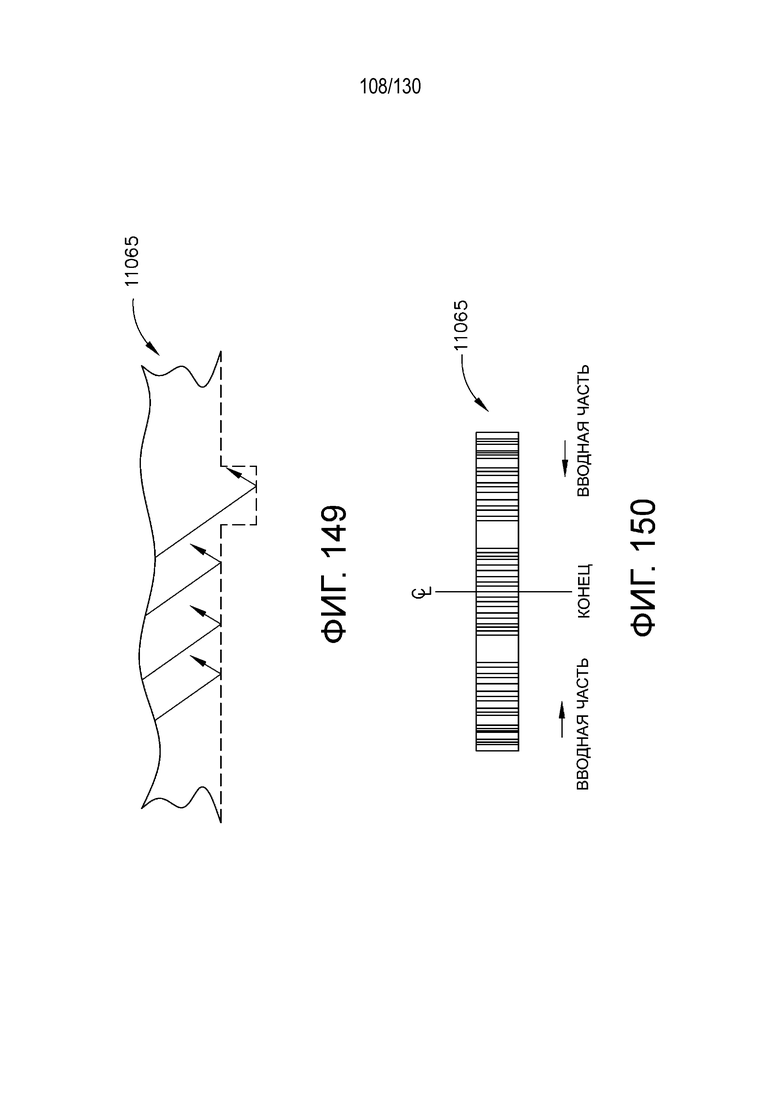
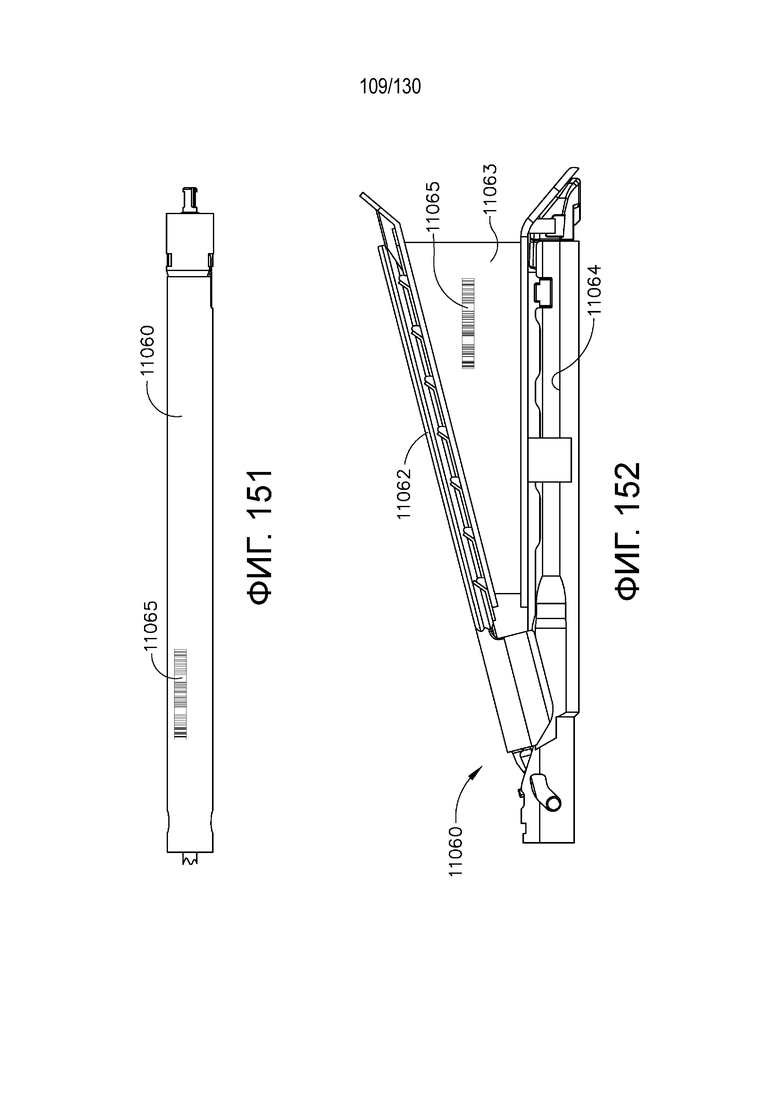
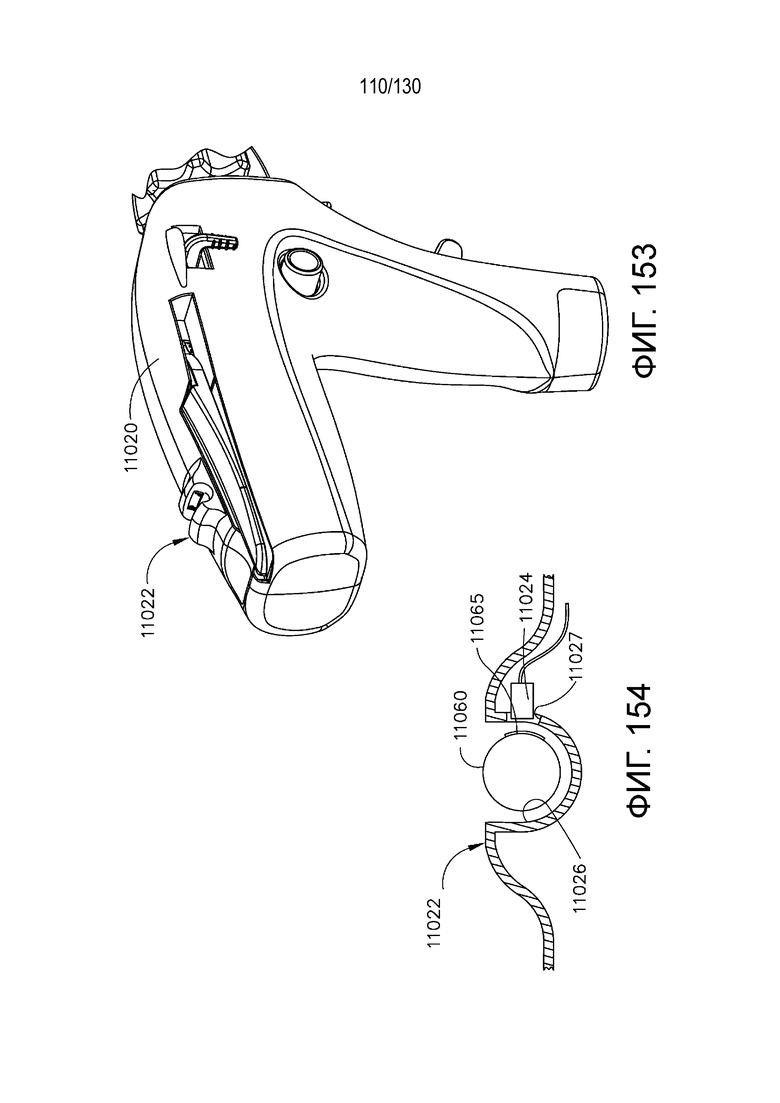
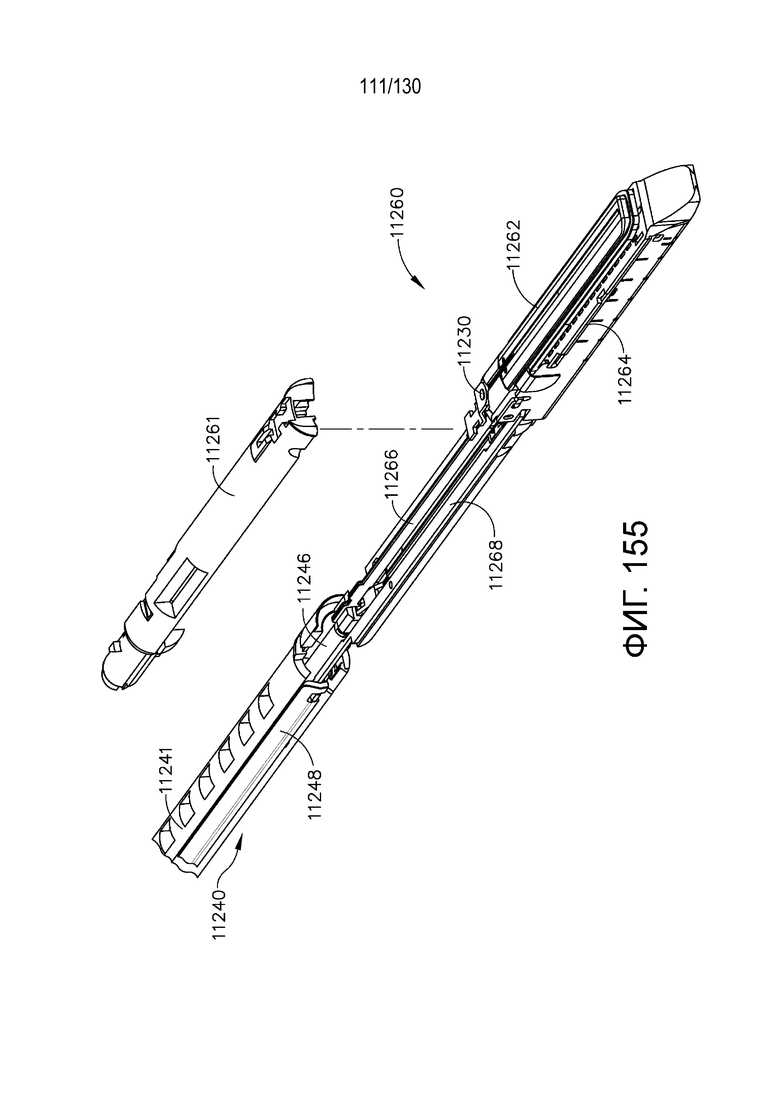
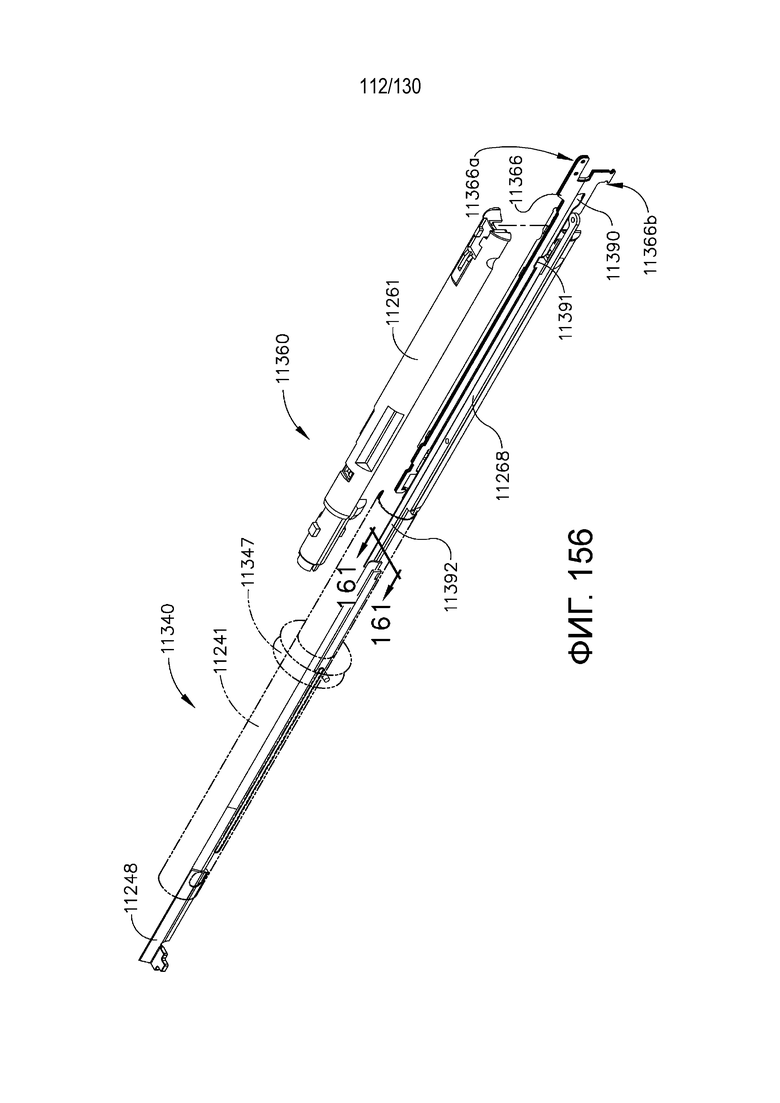


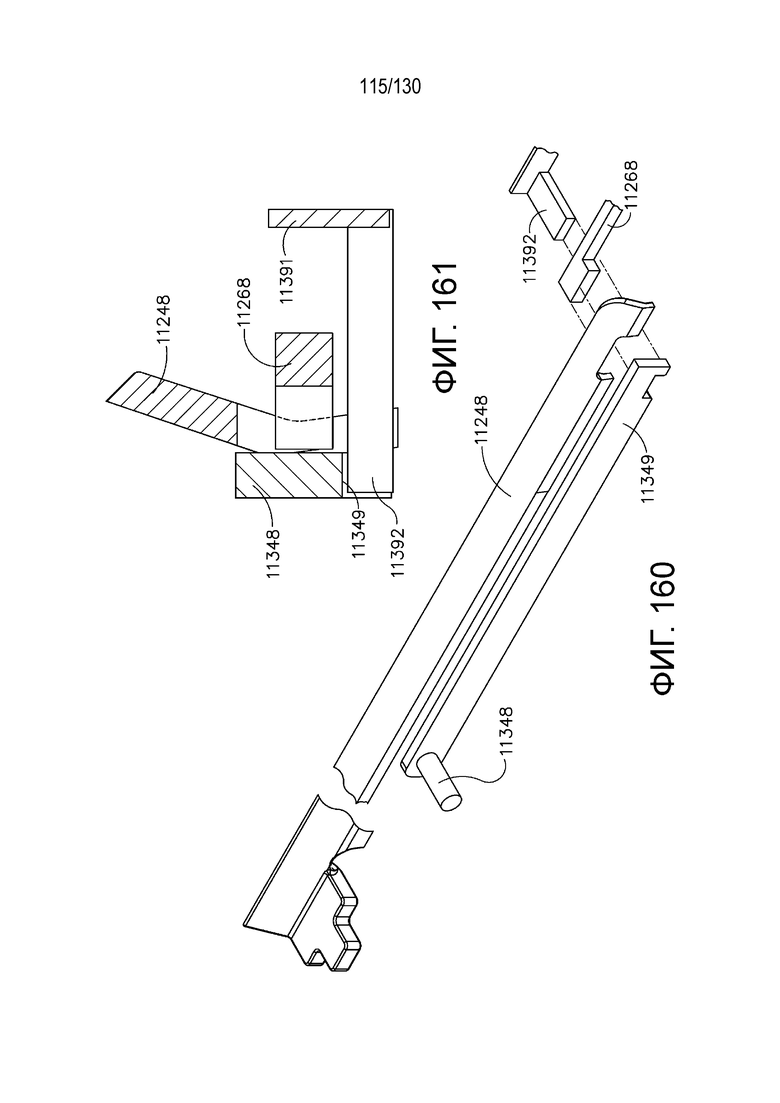
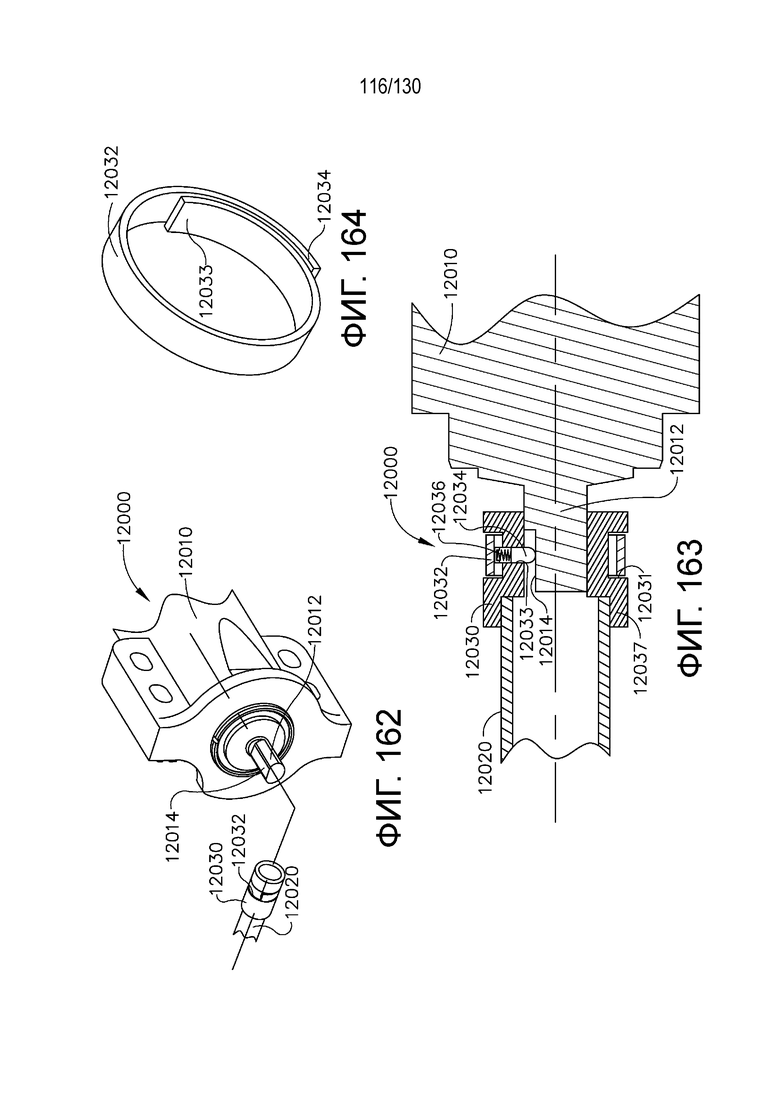
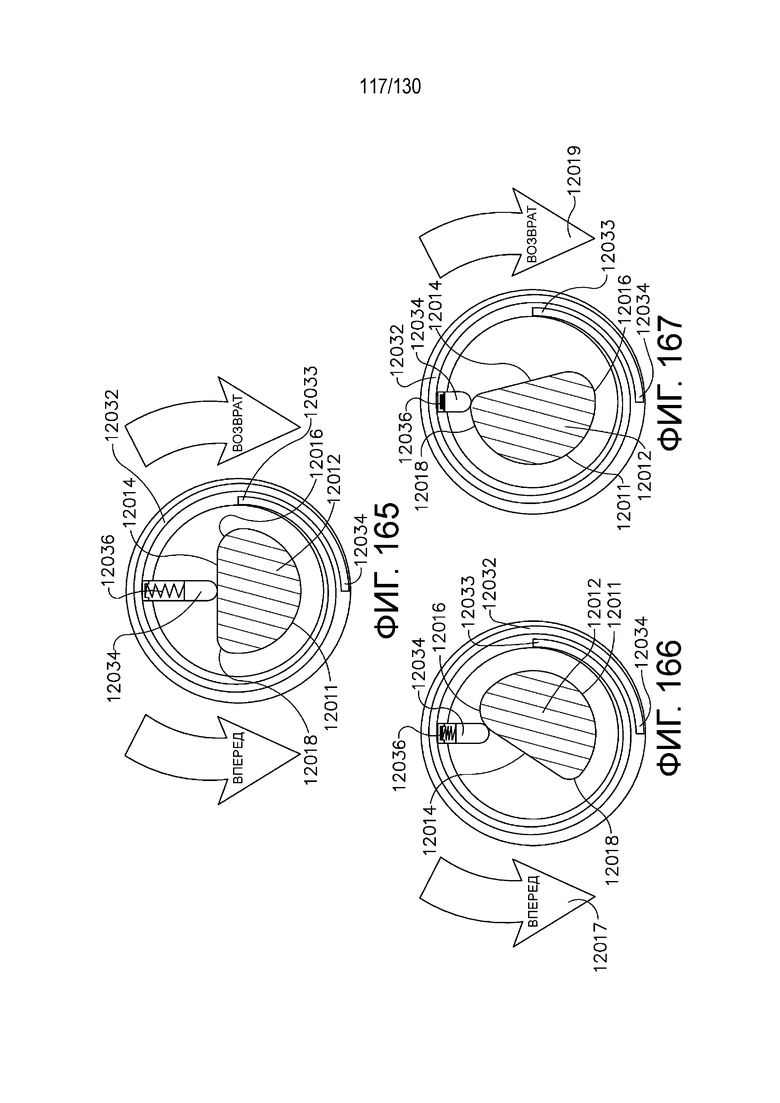

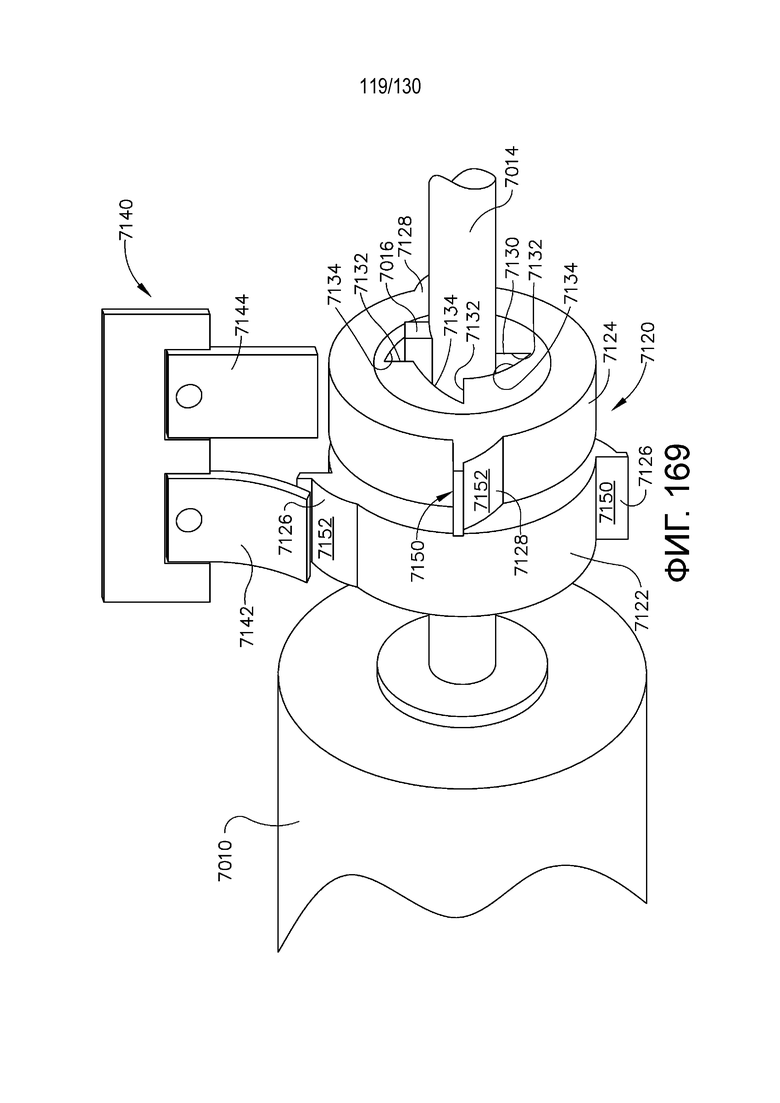
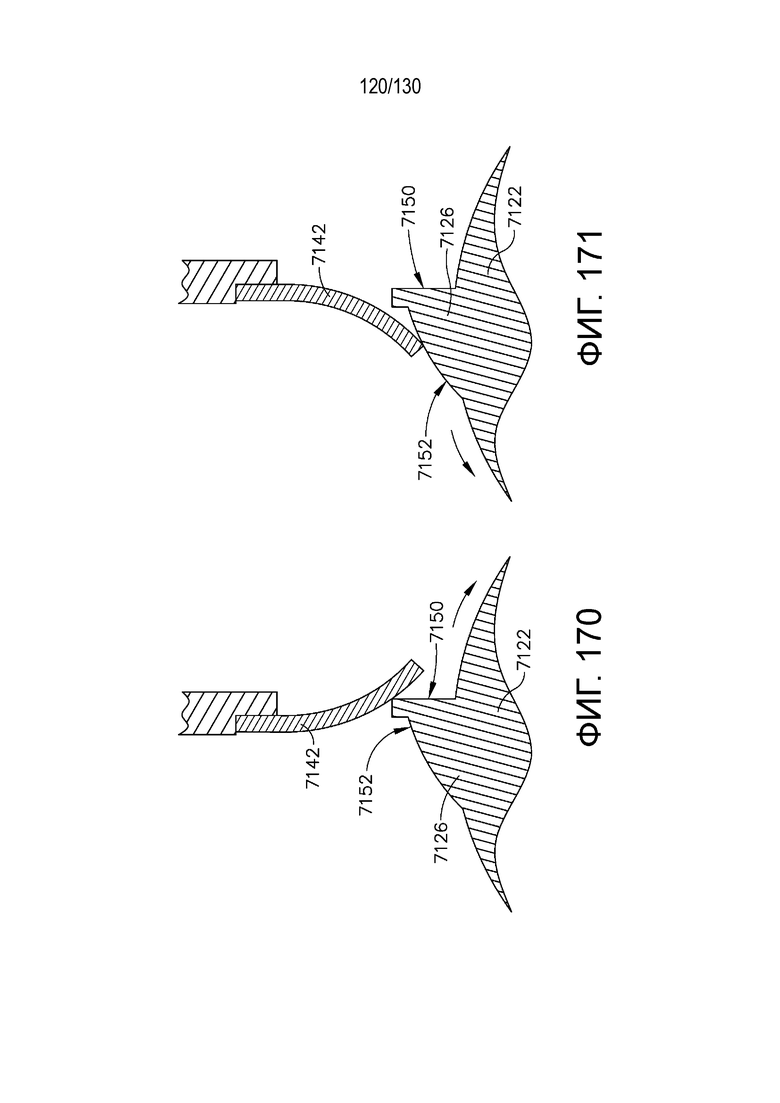
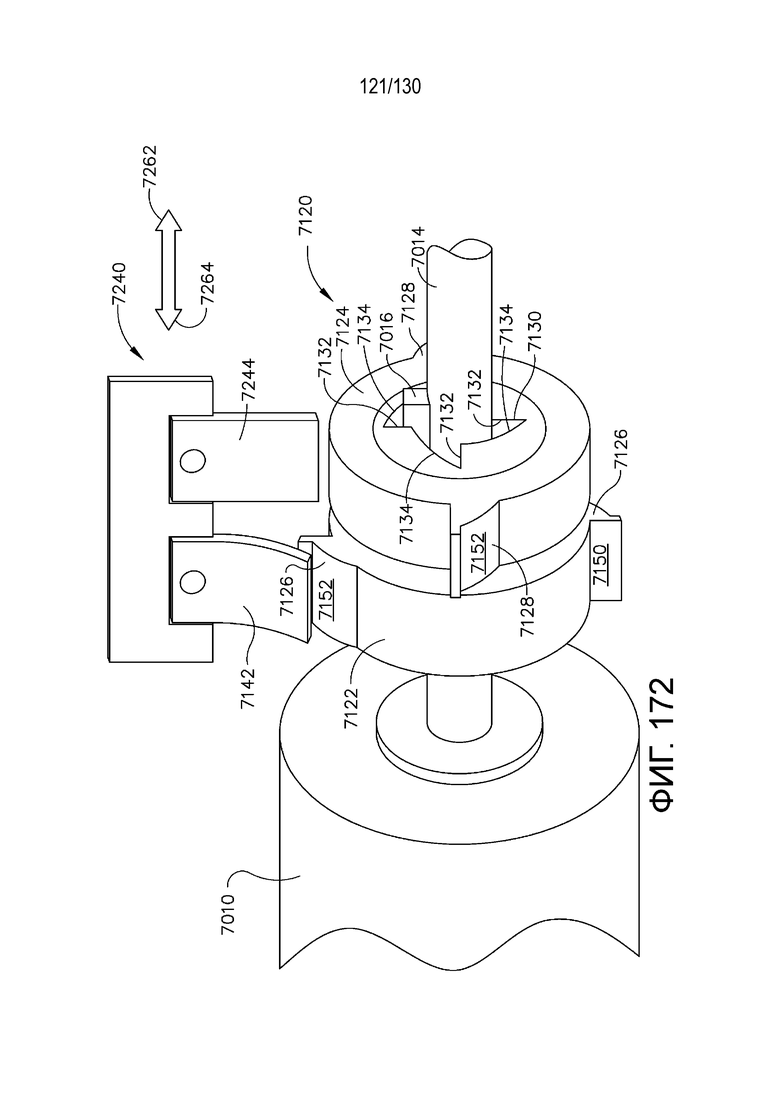


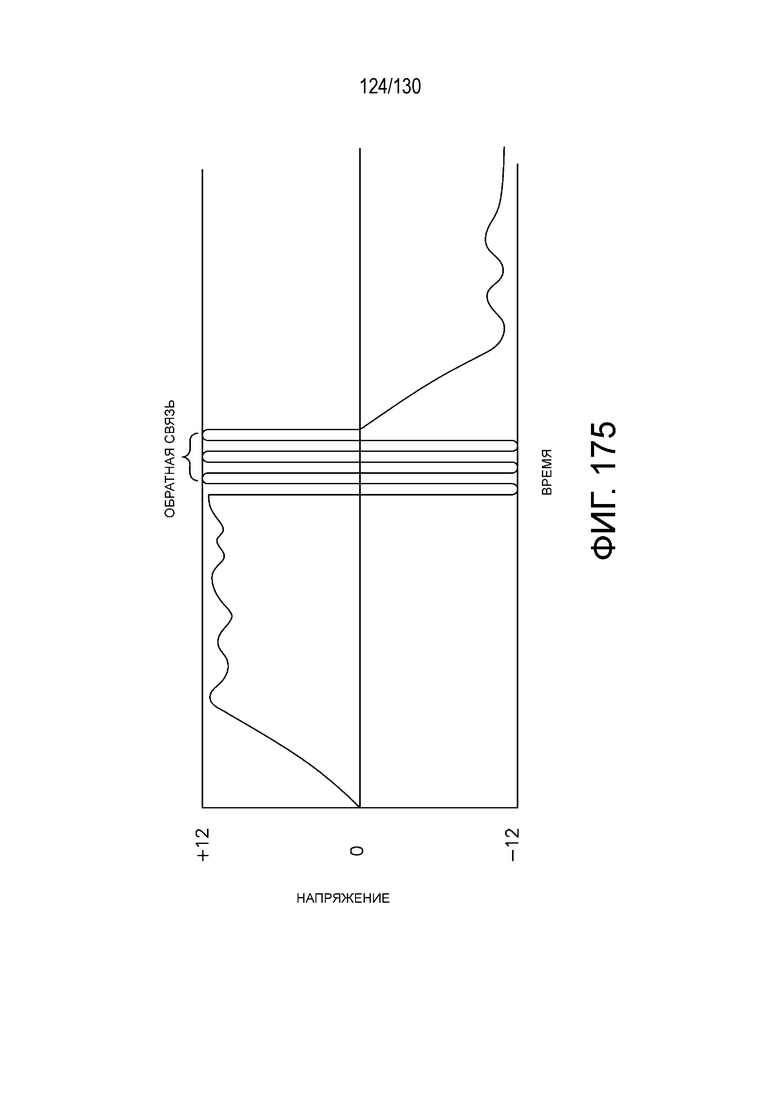
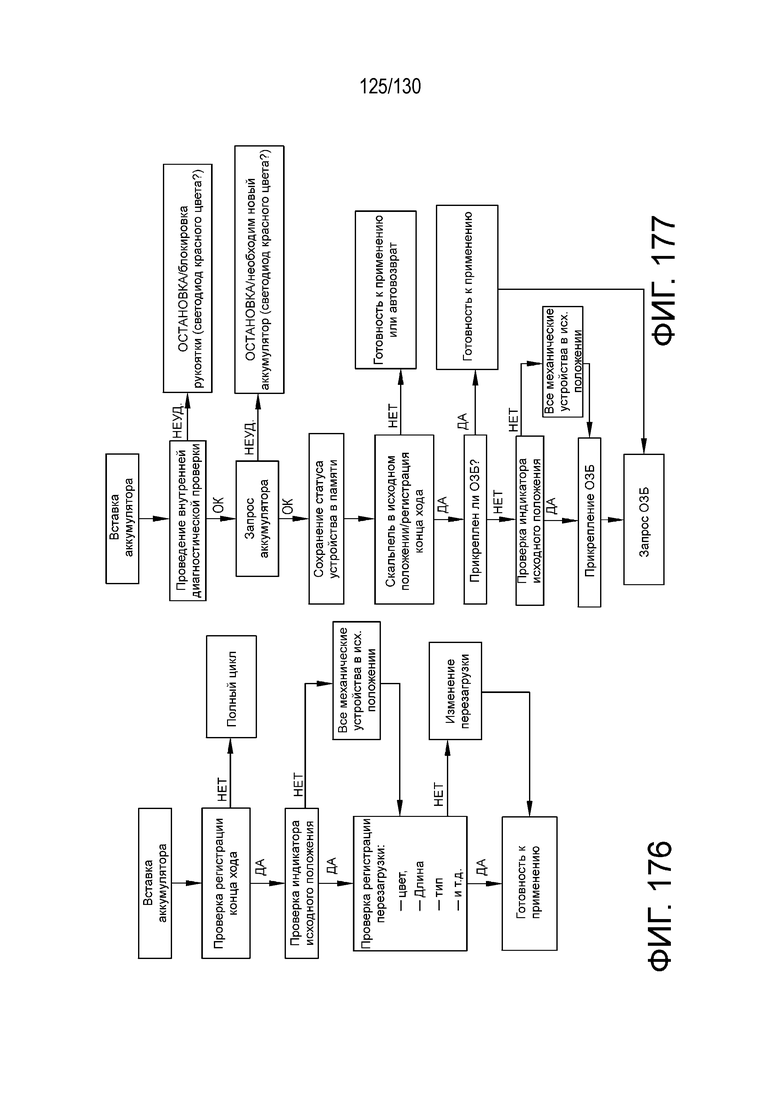

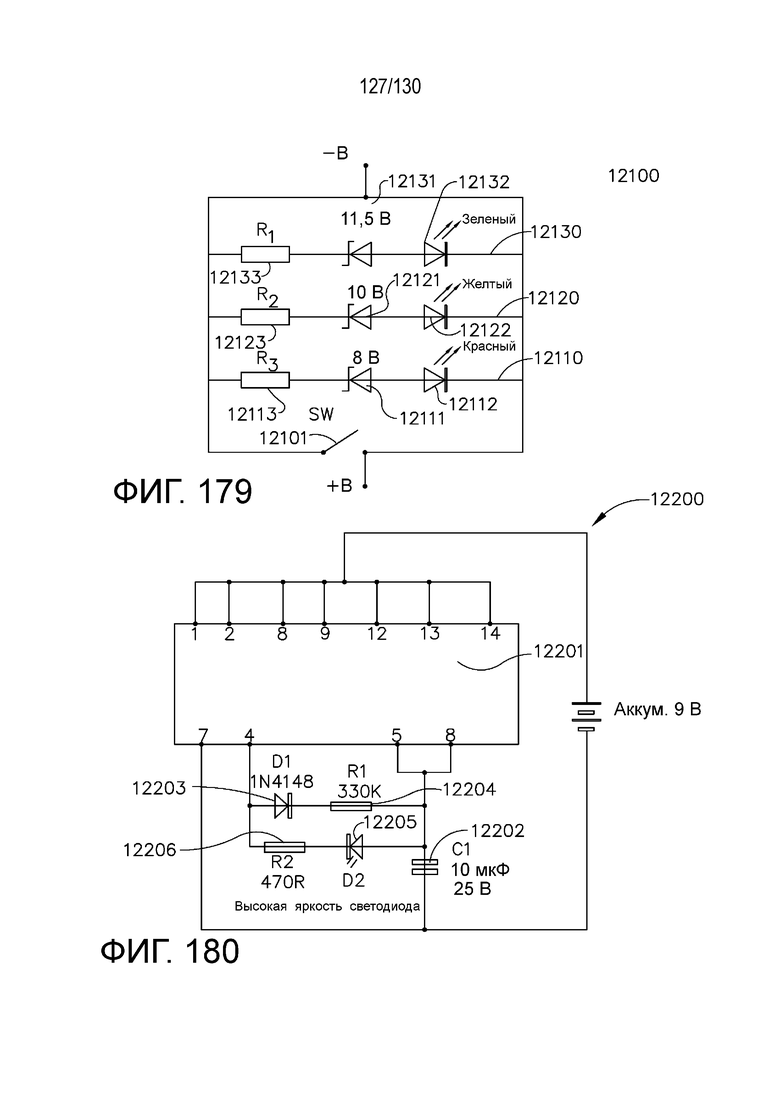
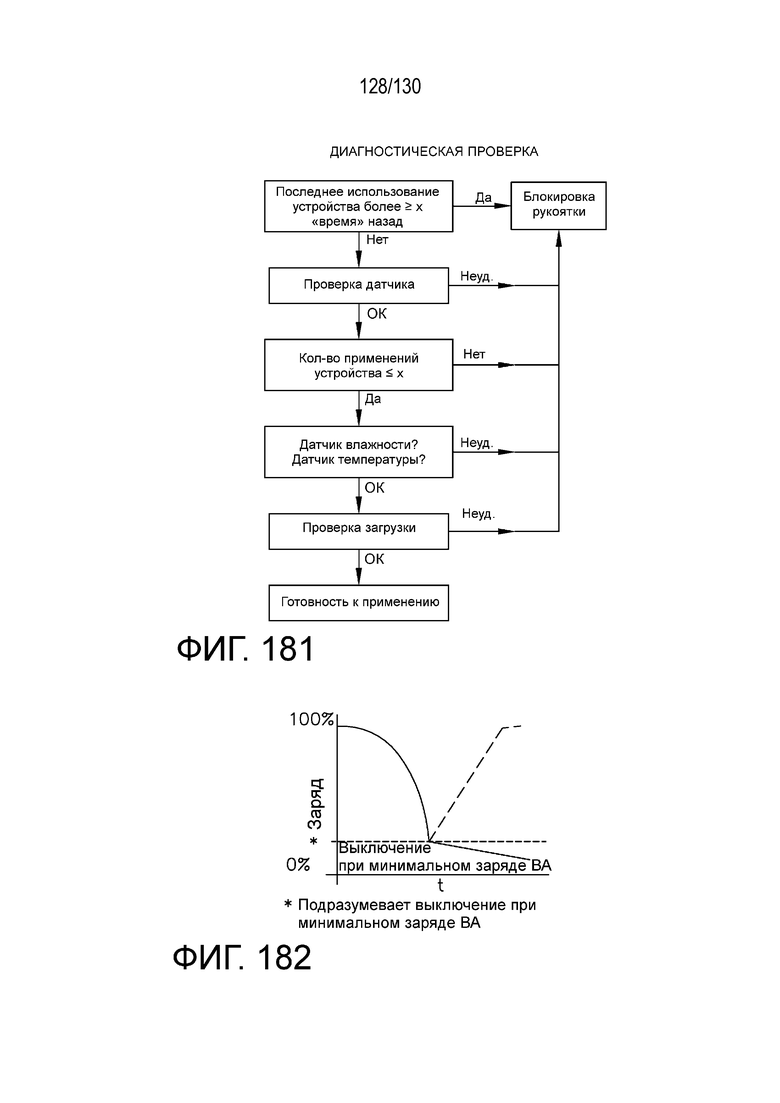
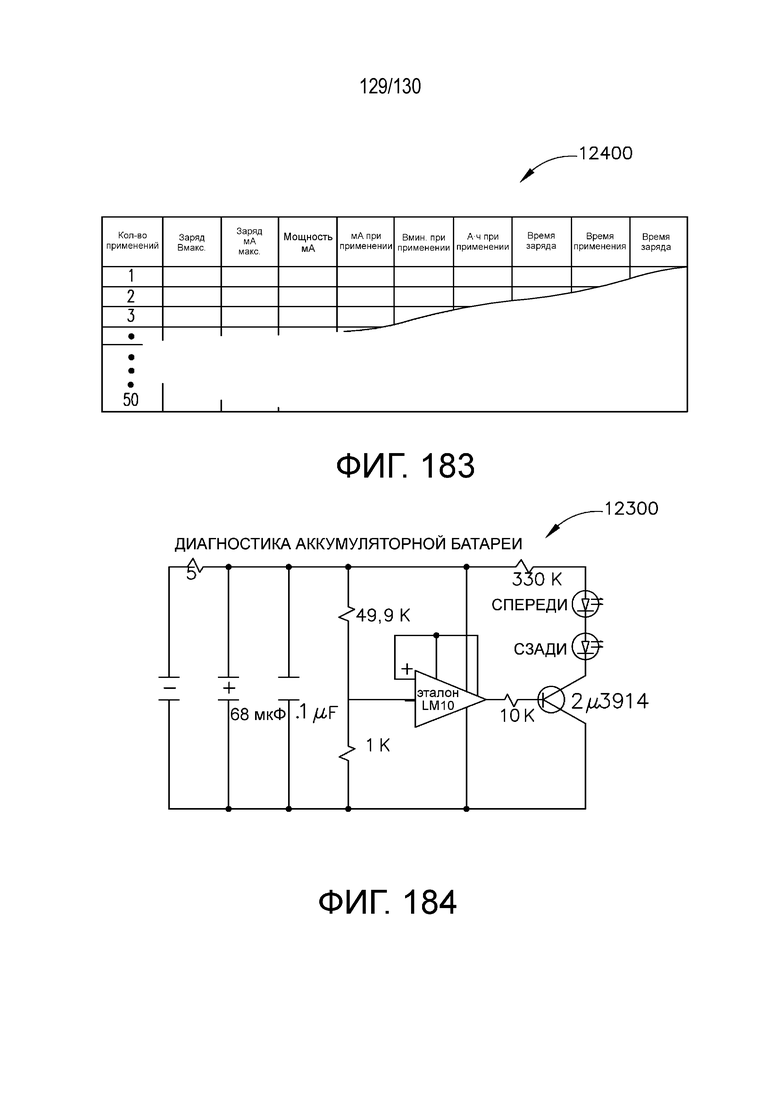
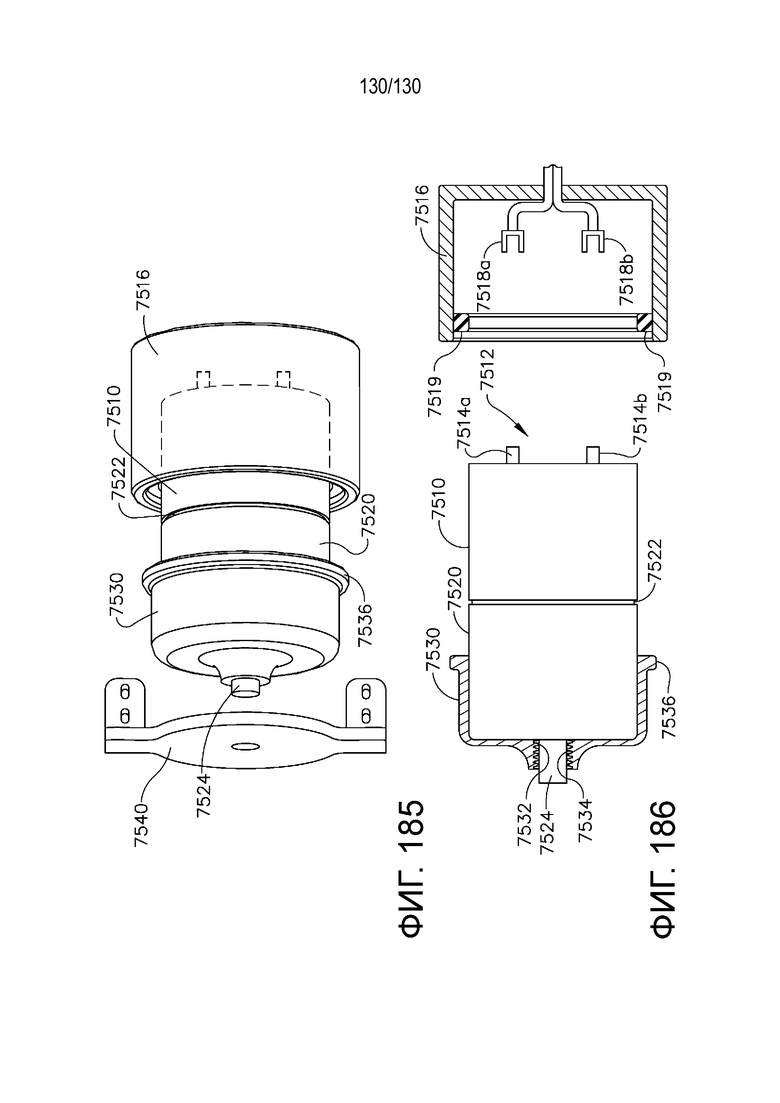
Группа изобретений относится к медицинской технике, а именно к хирургическим инструментам. Хирургический инструмент содержит ствол, концевой эффектор, проходящий в дистальном направлении от ствола, и корпус, проходящий в проксимальном направлении от ствола. Корпус содержит первый защитный участок, второй защитный участок, рабочий узел и по меньшей мере один крепежный элемент. Рабочий узел размещен в первом защитном участке. Рабочий узел содержит направляющую и выполнен с возможностью отсоединения от первого защитного участка. Второй защитный участок выполнен с возможностью съемного присоединения к первому защитному участку для обеспечения возможности отсоединения рабочего узла от первого защитного участка. По меньшей мере один крепежный элемент находится в зацеплении с первым защитным участком перед присоединением рабочего узла к первому защитному участку и выполнен с возможностью перемещения вдоль направляющей. По меньшей мере один крепежный элемент выполнен с возможностью перемещения для прикрепления рабочего узла к первому защитному участку. Рабочий узел содержит двигатель. Первый защитный участок содержит отсек для размещения двигателя, выполненный с возможностью приема двигателя, и при этом по меньшей мере один крепежный элемент содержит крепежный элемент двигателя, выполненный с возможностью перемещения для закрепления двигателя в отсеке для размещения двигателя. Корпус для применения с вышеуказанным хирургическим инструментом, причем хирургический инструмент включает в себя ствол, проходящий в дистальном направлении от корпуса, и концевой эффектор, проходящий в дистальном направлении от ствола. Корпус содержит отсоединяемый рабочий узел, первый защитный участок, второй защитный участок и по меньшей мере один крепежный элемент. Отсоединяемый рабочий узел содержит направляющую. Первый защитный участок выполнен с возможностью размещения отсоединяемого рабочего узла. Второй защитный участок выполнен с возможностью съемного присоединения к первому защитному участку для обеспечения возможности отсоединения отсоединяемого рабочего узла от первого защитного участка. По меньшей мере один крепежный элемент находится в зацеплении с первым защитным участком перед присоединением отсоединяемого рабочего узла к первому защитному участку и выполнен с возможностью перемещения вдоль направляющей. По меньшей мере один крепежный элемент выполнен с возможностью перемещения для прикрепления отсоединяемого рабочего узла к первому защитному участку. Рабочий узел содержит двигатель. Первый защитный участок содержит отсек для размещения двигателя, выполненный с возможностью приема двигателя, и при этом по меньшей мере один крепежный элемент содержит крепежный элемент двигателя, выполненный с возможностью перемещения для закрепления двигателя в отсеке для размещения двигателя. Группа изобретений обладает точностью сборки. 2 н. и 9 з.п. ф-лы, 186 ил.
1. Хирургический инструмент, содержащий:
ствол;
концевой эффектор, проходящий в дистальном направлении от ствола; и
корпус, проходящий в проксимальном направлении от ствола, причем корпус содержит:
первый защитный участок;
второй защитный участок;
рабочий узел, размещенный в первом защитном участке, причем рабочий узел содержит направляющую и выполнен с возможностью отсоединения от первого защитного участка, при этом второй защитный участок выполнен с возможностью съемного присоединения к первому защитному участку для обеспечения возможности отсоединения рабочего узла от первого защитного участка; и
по меньшей мере один крепежный элемент, находящийся в зацеплении с первым защитным участком перед присоединением рабочего узла к первому защитному участку и выполненный с возможностью перемещения вдоль направляющей, при этом по меньшей мере один крепежный элемент выполнен с возможностью перемещения для прикрепления рабочего узла к первому защитному участку;
причем рабочий узел содержит двигатель, причем первый защитный участок содержит отсек для размещения двигателя, выполненный с возможностью приема двигателя, и при этом по меньшей мере один крепежный элемент содержит крепежный элемент двигателя, выполненный с возможностью перемещения для закрепления двигателя в отсеке для размещения двигателя.
2. Хирургический инструмент по п. 1, в котором по меньшей мере один крепежный элемент выполнен с возможностью перемещения между незаблокированным положением и заблокированным положением.
3. Хирургический инструмент по п. 1, в котором по меньшей мере один крепежный элемент выполнен с возможностью зацепления и перемещения вдоль направляющей в заблокированное положение.
4. Хирургический инструмент по п. 1, в котором перемещение по меньшей мере одного крепежного элемента вдоль направляющей в заблокированное положение предотвращается, если рабочий узел размещен в первом защитном участке неправильно.
5. Хирургический инструмент по п. 1, в котором отсек для размещения двигателя содержит стенку, включающую в себя инструкции по сборке, для размещения двигателя в отсеке для размещения двигателя.
6. Хирургический инструмент по п. 1, в котором двигатель содержит криволинейную поверхность, причем крепежный элемент двигателя выполнен с возможностью перемещения вдоль криволинейной поверхности для закрепления двигателя в отсеке для размещения двигателя.
7. Корпус для применения с хирургическим инструментом, причем хирургический инструмент включает в себя ствол, проходящий в дистальном направлении от корпуса, и концевой эффектор, проходящий в дистальном направлении от ствола, при этом корпус содержит:
отсоединяемый рабочий узел, содержащий направляющую;
первый защитный участок, выполненный с возможностью размещения отсоединяемого рабочего узла;
второй защитный участок, выполненный с возможностью съемного присоединения к первому защитному участку для обеспечения возможности отсоединения отсоединяемого рабочего узла от первого защитного участка; и
по меньшей мере один крепежный элемент, находящийся в зацеплении с первым защитным участком перед присоединением отсоединяемого рабочего узла к первому защитному участку и выполненный с возможностью перемещения вдоль направляющей, при этом по меньшей мере один крепежный элемент выполнен с возможностью перемещения для прикрепления отсоединяемого рабочего узла к первому защитному участку;
причем рабочий узел содержит двигатель, причем первый защитный участок содержит отсек для размещения двигателя, выполненный с возможностью приема двигателя, и при этом по меньшей мере один крепежный элемент содержит крепежный элемент двигателя, выполненный с возможностью перемещения для закрепления двигателя в отсеке для размещения двигателя.
8. Корпус по п. 7, в котором по меньшей мере один крепежный элемент выполнен с возможностью перемещения между незаблокированным положением и заблокированным положением.
9. Корпус по п. 7, в котором по меньшей мере один крепежный элемент выполнен с возможностью зацепления и перемещения вдоль направляющей в заблокированное положение.
10. Корпус по п. 7, в котором перемещение по меньшей мере одного крепежного элемента вдоль направляющей в заблокированное положение предотвращается, если рабочий узел размещен в первом защитном участке неправильно.
11. Корпус по п. 7, в котором отсек для размещения двигателя содержит стенку, включающую в себя инструкции по сборке, для размещения двигателя в отсеке для размещения двигателя.
| US 2011017801 A1, 27.01.2011 | |||
| ХИРУРГИЧЕСКИЙ СШИВАТЕЛЬ | 1999 |
|
RU2161450C1 |
| US 20090163838 A1, 25.06.2009 | |||
| US 2010076474 A1, 25.03.2010 | |||
| US 2012110810 A1, 10.05.2012. | |||

