ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к беспроводной связи и, в частности, к способу и устройству для выполнения управления и измерения радиоресурса в системе беспроводной связи.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Стандарт долгосрочного развития (LTE) проекта партнерства 3-го поколения (3GPP) является улучшенной версией стандарта универсальной системы мобильной связи (UMTS) и 3GPP версии 8. Стандарт 3GPP LTE использует множественный доступ с ортогональным частотным разделением (OFDMA) в нисходящей линии связи и использует множественный доступ с частотным разделением и одной несущей (SC-FDMA) в восходящей линии связи. Стандарт 3GPP LTE использует схему с множеством входов и множеством выходов (MIMO), обладающую вплоть до четырех антенн. В последние годы, идет обсуждение вопроса касательно стандарта усовершенствованного 3GPP LTE (LTE-A), который является развитием стандарта 3GPP LTE.
[0003] В настоящее время ускорилась коммерциализация системы 3GPP LTE (A). Системы LTE распространяются быстрее в ответ на потребности пользователей в услугах, которые могут обеспечивать более высокое качество и более высокую емкость, гарантируя мобильность, как, впрочем, и голосовые услуги. Система LTE обеспечивает низкую задержку передачи, высокую скорость передачи и емкость системы, и улучшенное покрытие.
[0004] Для увеличения емкости применительно к потребности пользователей в услугах неотъемлемым может быть увеличение полосы пропускания и для эффективного использования фрагментированных небольших полос была разработана технология агрегации несущих (CA), направленная на получение эффекта, как если бы использовалась более широкая полоса, посредством группировки множества физических не последовательных полос в частотной области. Отдельные единицы несущих, группируемые посредством агрегации несущих, известны как составляющая несущая (CC). Каждая CC задается одной полосой пропускания и центральной частотой.
[0005] Система, в которой данные передаются и/или принимаются с помощью широкой полосы пропускания посредством множества CC, именуется системой с множеством составляющих несущих (мульти-CC система) или среда CA. Система с множеством составляющих несущих реализует как узкую полосу, так и широкую полосу, посредством использования одной или более несущих. Например, когда каждая несущая соответствует полосе пропускания в 20 МГц, полоса пропускания максимум в 100 МГц может быть обеспечена посредством использования пяти несущих.
[0006] Для того чтобы управлять мульти-CC системой, требуются различные сигналы управления между базовой станицей (BS), такой как eNB (усовершенствованный Узел-B), и пользовательским устройством (UE), таким как Терминал. Также требуется эффективная планировка соты для мульти-CC системы. Также различные сигналы или эффективные схемы планировки соты требуются для осуществления передачи между eNB и UE для обеспечения уменьшения межсотовых помех и расширений несущей. Кроме того, также допустимо межузловое распределение ресурсов посредством осуществления координации между eNB для UE там, где мульти-CC агрегация реализуется при нескольких eNB/узлах. Эффективная схема работы для планировки сот, включая новую несущую, которая обязательно передает ограниченные (или исключенные) элементы управления, и UE в среде кластера небольших сот, должны быть заданы из точки измерения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[0007] Настоящее изобретение предоставляет способ и устройство для выполнения управления сотой в системе беспроводной связи.
[0008] Настоящее изобретение также предоставляет способ и устройство для выполнения измерения и представления отчета по радиоресурсу в системе беспроводной связи.
[0009] Настоящее изобретение предоставляет способ и устройство для выполнения управления радиоресурсом или управления линией радиосвязи в системе беспроводной связи.
РЕШЕНИЕ ЗАДАЧИ
[0010] В аспекте предоставляется способ для выполнения измерения в системе беспроводной связи. Способ может включать в себя этапы, на которых: идентифицируют информацию касательно типа измерения, причем тип измерения указывает один из первого объекта измерения и второго объекта измерения; и выполняют измерение, используя сигнал измерения для объекта измерения, указываемого типом измерения.
[0011] Способ может дополнительно включать в себя этап, на котором принимают конфигурацию измерения от базовой станции, причем конфигурация измерения включает в себя информацию соты и информацию о первом объекте измерения и втором объекте измерения, причем информация соты указывает соту, к которой применяется первый объект измерения или второй объект измерения, причем первый объект измерения включает в себя первое поле субкадра и первое поле ресурса измерения, причем первое поле субкадра указывает по меньшей мере один субкадр из числа множества субкадров, в котором выполняется измерение, причем первое поле ресурса измерения указывает блок ресурса, в котором выполняется измерение, причем второй объект измерения включает в себя второе поле субкадра и второе поле ресурса измерения, причем второе поле субкадра, указывает по меньшей мере один субкадр из числа множества субкадров, в котором выполняется измерение, причем второе поле ресурса измерения указывает блок ресурса, в котором выполняется измерение.
[0012] Способ может дополнительно включать в себя то, что когда тип измерения указывает первый объект измерения, то сота, указываемая информацией соты, является сотой прерывистой передачи (DTX) применительно к сигналу измерения, а когда тип измерения указывает второй объект измерения, то сота, указываемая информацией соты, является сотой непрерывной передачи применительно к сигналу измерения.
[0013] Способ может дополнительно включать в себя то, что сигнал измерения включает в себя одно из следующего: сигнал обнаружения, опорный сигнал измерения (MRS) и общий для соты RS (CRS).
[0014] В другом аспекте, предоставляется беспроводное устройство для выполнения измерения в системе беспроводной связи. Беспроводное устройство включает в себя радиочастотный (RF) модуль для передачи и приема радиосигнала; и процессор, функционально связанный с RF модулем, при этом процессор выполнен с возможностью: определения типа измерения, указывающего ограниченное измерение; и выполнения измерения, используя сигнал измерения в субкадре, сконфигурированном в ограниченном измерении в соответствии с типом измерения.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0015] Данное изобретение предоставляет усовершенствованную систему связи, включающую в себя новый вид несущей (или соты) для решения проблем помех между множествами сот. Также данное изобретение предоставляет механизмы для осуществления управления, включающего в себя ограниченное измерение для нового типа несущей, при этом RS, зависимый от конкретной Соты, может не передаваться в каждом субкадре. Более подробно, данное изобретение выполняет адаптивное измерение, соответствующее индикатору измерения. Вследствие этого, данное изобретение может поддерживать преимущества, связанные с потреблением батареи, Качеством Услуги (QoS) для пользовательских устройств на краю соты и также расширяемостью несущей. Следовательно, в данном изобретении обеспечиваются более эффективные и точные планировка соты и адаптивное измерение.
[0016] КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Фиг. 1 показывает систему беспроводной связи, к которой применяется настоящее изобретение.
[0018] Фиг. 2 показывает примерную концепцию для технологии агрегации несущих (CA) в соответствии с примерным вариантом осуществления настоящего изобретения.
[0019] Фиг. 3 показывает структуру элементов управления нисходящей линии связи, к которым применяется настоящее изобретение.
[0020] Фиг. 4 показывает примерную блок-схему для выполнения управления в соответствии с типом управления в качестве примерного варианта осуществления настоящего изобретения.
[0021] Фиг. 5 показывает примерный набор ограниченных измерений в качестве примерного варианта осуществления настоящего изобретения.
[0022] Фиг. 6 и 7 показывают примерную блок-схему для определения измерения RRM/RLM в соответствии с вариантом осуществления настоящего изобретения.
[0023] Фиг. 8 и Фиг. 9 показывают примерные измерения RRM из расчета на RB в соответствии с примерным вариантом осуществления настоящего изобретения.
[0024] Фиг. 10 показывает структурную схему, показывающую систему беспроводной связи в соответствии с примерным вариантом осуществления настоящего изобретения.
[0025] ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0026] Фиг. 1 показывает систему беспроводной связи, к которой применяется настоящее изобретение. Система беспроводной связи также может именоваться системой наземной сети радиодоступа UMTS (E-UTRAN) или долгосрочного развития (LTE)/LTE-A.
[0027] E-UTRAN включает в себя, по меньшей мере, одну базовую станцию 20 (BS), которая предоставляет плоскость управления и плоскость пользователя пользовательскому устройству 10 (UE). UE 10 может быть фиксированным или мобильным и может именоваться согласно другой терминологии, как, например, мобильная станция (MS), терминал пользователя (UT), абонентская станция (SS), мобильный терминал (MT), беспроводное устройство и т.д. BS 20, как правило, является фиксированной станцией, которая осуществляет связь с UE 10 и может именоваться согласно другой терминологии, как, например, усовершенствованный узел-B (eNB), базовая приемопередающая система (BTS), точка доступа и т.д.
[0028] Схемы множественного доступа, применяемые к системе беспроводной связи, не ограничиваются. А именно могут быть использованы различные схемы множественного доступа, такие как CDMA (Множественный Доступ с Кодовым Разделением), TDMA (Множественный Доступ с Временным Разделением), FDMA (Множественный Доступ с Частотным Разделением), OFDMA (Множественный Доступ с Ортогональным Частотным Разделением), SC-FDMA (FDMA с Одной Несущей), OFDMA-OFDMA, OFDMA-TDMA, OFDMA-CDMA, или подобная. Для восходящей передачи и нисходящей передачи может быть использована схема TDD (Дуплекс с Временным Разделением), при которой передача осуществляется посредством использования разного времени, или схема FDD (Дуплекс с Частотным Разделением), при которой передача осуществляется посредством использования разных частот.
[0029] BS 20 взаимно соединены посредством интерфейса X2. BS 20 также соединены посредством интерфейса S1 с усовершенствованным пакетным ядром 30 (EPC), в частности, с объектом управления мобильностью (MME), посредством S1-MME и с обслуживающим шлюзом (S-GW) посредством S1-U.
[0030] EPC 30 включает в себя MME, S-GW и шлюз сети с коммутацией пакетов (P-GW). MME обладает информацией доступа UE или информацией о возможностях UE, и такая информация, как правило, используется для управления мобильностью UE. S-GW является шлюзом, обладающим E-UTAN в качестве конечной точки. P-GW является шлюзом, обладающим PDN в качестве конечной точки.
[0031] Слои протокола радиоинтерфейса между UE и сетью могут быть классифицированы на первый слой (L1), второй слой (L2) и третий слой (L3) на основании более низких трех слоев модели взаимодействия открытых систем (OSI), которая хорошо известна в системе связи. Среди них, физический (PHY) слой, принадлежащий к первому слою, обеспечивает услугу переноса информации посредством использования физического канала, а слой управления радиоресурсом (RRC), принадлежащий к третьему слою, служит для управления радиоресурсом между UE и сетью. С этой целью, слой RRC осуществляет обмен сообщением RRC между UE и BS.
[0032] Система беспроводной связи настоящего изобретения использует слепое декодирование для детектирования Физического Канала Управления Нисходящей Линии Связи (PDCCH). Слепое декодирование является схемой, при которой требуемый идентификатор демаскируется из CRC в PDCCH для определения того, является ли PDCCH своим собственным каналом, посредством выполнения проверки ошибки CRC. eNB определяет формат PDCCH в соответствии с Информацией Управления Нисходящей Линии Связи (DCI), которая должна быть передана в UE. Впоследствии, eNB прикрепляет результат контроля циклическим избыточным кодом (CRC) к DCI и маскирует уникальный идентификатор (именуемый временным идентификатором радиодоступа (RNTI)) в CRC в соответствии с владельцем или использованием PDCCH. Например, если PDCCH служит для конкретного UE, уникальный идентификатор (например, RNTI соты (C-RNTI)) UE может быть маскирован в CRC. В качестве альтернативы, если PDCCH служит для сообщения поискового вызова, идентификатор индикатора поискового вызова (например, RNTI поискового вызова (P-RNTI)) может быть маскирован в CRC. Если PDCCH служит для информации системы (в частности, блока информации системы (SIB), который будет описан ниже), идентификатор информации системы и RNTI информации системы (например, SI-RNTI) могут быть маскированы в CRC. Для указания ответа произвольного доступа, который является ответом для передачи преамбулы произвольного доступа UE, RNTI произвольного доступа (например, RA-RNTI) может быть маскирован в CRC.
[0033] Фиг. 2 показывает примерную концепцию для технологии агрегации несущих (CA) в соответствии с примерным вариантом осуществления настоящего изобретения.
[0034] Обращаясь к Фиг. 2, иллюстрируется структура DL/UL субкадра, рассматриваемая в системе 3GPP LTE-A (Усовершенствованное LTE), при этом осуществляется агрегация нескольких CC (в данном примере, существует 3 несущие), UE может отслеживать и принимать DL сигнал/данные из нескольких DL CC одновременно. Тем не менее, даже если сота осуществляет управление N DL CC, сеть может конфигурировать UE с помощью M DL CC, при этом M≤N, так что UE, отслеживающие сигнал/данные DL, ограничиваются этими M DL CC. В дополнение, сеть может конфигурировать L DL CC в качестве основных DL CC, по которым UE должно приоритетно отслеживать/принимать DL сигнал/данные, либо специально для UE, либо специально для соты, при этом L≤M≤N. Таким образом, UE может поддерживать одну или более несущие (Несущая 1 или более Несущие 2…N) в соответствии с возможностями UE.
[0035] Далее, CC могут быть разделены на первичную составляющую несущую (PCC) и вторичную составляющую несущую (SCC) в зависимости от того, активированы они или нет. PCC является несущей, которая постоянно активирована, а SCC является несущей, которая активируется или деактивируется в соответствии с конкретными условиями. Следует отметить, что может существовать одна или более особые SCC (например, именно Супер SCC), которые не могут быть активированы или деактивированы, а наоборот, которые постоянно активированы подобно PCC. Здесь, активация относится к состоянию, при котором передаются или принимаются данные трафика, или состоянию, при котором данные трафика готовы для того, чтобы быть переданными или принятыми. Деактивация относится к состоянию, при котором данные трафика не могут быть переданы или приняты и доступно измерение или передача и прием минимальной информации. Кроме того, PCC и/или Супер SCC также могут быть активированы или деактивированы, используя указание активации/Деактивации в качестве бита. UE может сначала закрепляться на PCC в качестве Первичной обслуживающей соты (Pcell) при исходном осуществлении доступа. UE также может использовать только одну первичную составляющую несущую или одну или более вторичные составляющие несущие наряду с первичной составляющей несущей. Для UE может быть выделена первичная составляющая несущая и/или вторичная составляющая несущая от BS. Следует отметить, что когда реализуется межузловая агрегация ресурсов, UE может быть сконфигурировано с помощью Супер SCC, которая функционирует подобно PCC, как впрочем и потенциально вторичной составляющей несущей(их), от другой BS.
[0036] PCC и/или Супер SCC является несущей, посредством которой осуществляется обмен элементами первичной информации управления между BS и UE. SCC является несущей, которая выделяться в соответствии с запросом от UE или инструкцией от BS. PCC и/или Супер SCC может быть использована применительно к UE для входа в сеть и/или может быть использована для распределения SCC. PCC и/или Супер SCC может быть выбрана из числа всего набора несущих, вместо того, чтобы быть зафиксированной на конкретной несущей. Несущая, установленная в качестве SCC, также может быть изменена на PCC или Супер SCC в зависимости от сценария/настройки межузловой агрегации ресурсов.
[0037] Как описано выше, DL CC может составлять одну обслуживающую соту, и DL CC и UL CC могут составлять одну обслуживающую соту, будучи связанными друг с другом. Кроме того, первичная обслуживающая сота (PCell) соответствует PCC, а вторичная обслуживающая сота (SCell) соответствует SCC. Каждая несущая и сочетание несущих также может именоваться как каждая одна обслуживающая сота как PCell или SCell. Т.е. одна обслуживающая сота может соответствовать только одной DL CC, или может соответствовать как DL CC, так и UL CC.
[0038] Pcell является ресурсом, в котором UE исходно создает соединение (или RRC-соединение) из числа нескольких сот. Pcell служит в качестве соединения (или RRC-соединения) для сигнализации в отношении множества сот (CC) и является особой CC для управления контекстом UE, который является информацией соединения, которая относится к UE. Кроме того, когда Pcell (PCC) создает соединение с UE и, следовательно, находится в режиме RRC-соединения, PCC всегда существует в состоянии активации. SCell (SCC) является ресурсом, назначенным UE помимо Pcell (PCC). SCell является расширенной несущей для дополнительного назначения ресурса и т.д., в дополнение к PCC, и может быть разделена на состояние активации и состояние деактивации. SCell исходно находится в состоянии деактивации. Если SCell деактивирована, это включает в себя отсутствие передачи SRS по SCell, отсутствие отчета по CQI/PMI/RI/PTI для SCell, отсутствие передачи по UL-SCH по SCell, отсутствие отслеживания PDCCH по SCell, отсутствие отслеживания PDCCH по SCell. UE принимает элемент управления MAC Активации/Деактивации в данном TTI, активирующий или деактивирующий SCell.
[0039] Элемент управления MAC, включающий в себя индикатор активации, имея длину в 8 бит, используется для активации каждой обслуживающей соты. Здесь, Pcell неявно рассматривается как активированная между UE и eNB и, следовательно, Pcell дополнительно не включается в индикатор активации. Индексу Pcell всегда задано конкретное значение, и здесь предполагается, что индекс задан 0. Таким образом Scell индексируются с помощью 1, 2, 3, …, 7, при этом индекс 1 обслуживающей соты соответствует 7-му биту слева, которые являются оставшимися индексами, отличными от 0, т.е. индекса Pcell. Здесь, индекс обслуживающей соты может быть логическим индексом, который определяется относительно для каждого UE, или может быть физическим индексом для указания соты конкретной полосы частот. И система CA поддерживает неперекрестное планирование задействования несущих (планирование по самой несущей) или перекрестное планирование задействования несущих.
[0040] В системе LTE, FDD DL субкадр несущей или TDD DL субкадр начинается с нескольких символов каналов управления, таких как PDCCH, PHICH и PCFICH, и использует оставшиеся символы для передачи PDSCH. Количество OFDM-символов, используемых для каналов управления, может быть динамически указано посредством PCFICH или полу-статически посредством RRC сигнализации для UE. Т.е. CRS и каналы управления, такие как PCFICH/PDCCH/PHICH по некоторым OFDM-символам первой части, передаются посредством всех DL субкадров для конкретной новой несущей, кроме как DL субкадра, сконфигурированного для конкретной цели, например, MBSFN. Соответственно, может быть гарантирована обратная совместимость для доступа посредством существующего UE и для предоставления услуги существующему UE. В дополнение, применительно к следующей системе LTE или усовершенствованной системе связи, может быть введена новая форма несущей или соты, в которой все или некоторые из предлагаемых обратно совместимых унаследованных (от более ранних версий стандарта(ов)) сигналов и/или каналов не передаются по причинам улучшения проблемы помех между множеством сот, улучшения расширяемости несущей и увеличения степени свободы при обеспечении расширенных возможностей (например, 8Tx MIMO).
[0041] Настоящее изобретение включает в себя то, что несущая задается в качестве соты с новой формой несущей с оптимизированным типом для передачи Опорного Сигнала (RS) и каналов управления. DL ресурсы могут быть эффективно использованы для улучшения выполнения DL приема и минимизации служебных данных RS посредством приема основанных на DM-RS DL данных, передаваемых для конкретного UE способом (т.е. предварительно кодированными), и измерения состояния канала на основании конфигурируемого CSI-RS с относительно низкой плотностью, вместо пропуска или значительного уменьшения передачи фиксированного CRS с высокой плотностью, т.е. прием DL данных и измерение состояния канала зависят от передачи CRS главным образом в новой соте. Соответственно, способ выполнения планирования DL данных, используя новую соту, может быть принят во внимание посредством управления унаследованными RS, т.е. сконфигурированный в качестве DL Режима Передачи (TM) у UE, для которого была распределена новая несущая, в частности, только TM (например, TM режим 8 или 9), основанные на DM-RS, из числа выше заданных DL TM. Также может потребоваться выполнение синхронизации/слежения и различных типов измерения по новой несущей для обеспечения эффективности. Т.е. существует потребность в новой несущей для эффективной планировки соты, поскольку Pcell полностью насыщена передачей и приемом сигналов управления и опорных сигналов между eNB и UE, также Pcell требуется больше ресурсов для управления UE с еще одними Scell применительно к CA.
[0042] Кроме того, данное изобретение предусматривает то, что расширенный PDCCH (ePDCCH) может быть одним из решений ограничения применительно к передаче PDCCH или передаче новой информации управления системы связи ближайшего будущего, включающей в себя новый тип несущей. ePDCCH, который мультиплексируется с PDSCH, может быть использован как показано на Фиг. 3 для поддержки нескольких Scell в CA.
[0043] Обращаясь к Фиг. 3, ePDCCH может быть помещен в область данных, которая переправляет информацию управления. Таким образом, UE может отслеживать множество PDCCH/ePDCCH в области управления и/или области данных. Так как PDCCH передается по CCE, ePDCCH может быть передан по eCCE (расширенный CCE) в качестве агрегации некоторого количества последовательных CCE, при этом eCCE соответствует множеству REG. Если ePDCCH более эффективен, чем PDCCH, стоит иметь субкадры, где используются только ePDCCH без PDCCH. Наличие субкадров PDCCH и новых только ePDCCH, или наличие только субкадров только ePDCCH может быть в новом типе несущей как NC, которая имеет оба унаследованных LTE субкадра. Также предполагается, что MBSFN субкадры существуют в новой несущей NC. Использовать ли PDCCH в MBSFN субкадрах в NC и то, сколько OFDM-символов будет распределено, если используется, может быть сконфигурировано через RRC сигнализацию. Кроме того, также TM10 и новый TM могут быть рассмотрены для нового типа несущей. Далее, новый тип несущей относится к несущей, где все или часть унаследованных сигналов могут быть опущены или переданы другими способами. Например, новая несущая может относится к несущей, где CRS может быть опущен в некоторых субкадрах или может не передаваться PBCH. Новая несущая может не означать то, что UE Rel-11 и ниже не могут реализовывать точно такую же производительность в сравнении с унаследованной несущей из-за того, что отсутствуют некоторые свойства, такие как непрерывная CRS передача.
[0044] UE сначала определяет очередность модуляции и размер(ы) транспортного блока в физическом совместно используемом канале нисходящей линии связи, посредством считывания 5-битной схемы модуляции и кодирования/поля версии избыточности в DCI. Но новая несущая может не переносить унаследованный PDCCH, и, следовательно, ePDCCH и PDSCH могут начинаться с первого OFDM-символа в каждом субкадре. Применительно к новой несущей, могут потребоваться два подхода. Один подход состоит в полном исключении CRS и PDCCH из передачи и, следовательно, все субкадры работают на основе DM-RS и ePDCCH. Другой подход состоит в том, чтобы позволять редкую передачу CRS и PDCCH таким образом, что подмножество субкадров может переносить CRS и PDCCH или может переносить сигналы обнаружения и PDCCH. Когда CRS и PDCCH не передаются, может предполагаться, что ePDCCH и PDSCH могут начинаться в первом OFDM-символе. Таким образом, начальный OFDM-символ может меняться от субкадра к субкадру или меняться полу-статично или определяться неявно на основании некоторых других сигналов или конфигураций, таких как набор ограниченных измерений, при этом набор ограниченных измерений 0 будет предполагаться как несущий CRS, а набор ограниченных измерений 1 будет предполагаться как не несущий CRS/PDCCH и, следовательно, ePDCCH/PDSCH может начинаться в первом OFDM-символе.
[0045] Кроме того, для эффективной работы применительно к развертыванию плотной горячей точки с небольшой сотой, дополнительно может быть рассмотрено включение/выключение сот вместо динамического или полу-статического. Может предполагаться, что могут быть переданы сигналы обнаружения, которые могут иметь периодичность и/или ресурс, отличные от существующего в настоящий момент PSS/SSS/CRS или CSI-RS, которые будут использованы для идентификации соты и/или измерения. Предложение данного изобретения может быть применено к случаю, где выполняется включение/выключение соты и когда передаются сигналы обнаружения. Может предполагаться, что изобретение, применяемое к TRS/CRS, может быть применено к сигналам обнаружения без потери универсальности. TRS относится к опорным сигналам, используемым для слежения за временем/частотой (RS слежения).
[0046] Как описано, в новой несущей особый субкадр может не иметь унаследованного PDCCH и начинать PDSCH в первом OFDM-символе, при этом количество OFDM-символов, используемых в PDSCH в особом субкадре, возрастает до 8-11 с 7-10 в нормальном CP. Когда количество OFDM-символов равно или больше 11, что является основой TBS вычисления в нормальном субкадре в нормальной несущей, коэффициент масштабирования может быть увеличен до 1. Кроме того, данное изобретение предлагает использовать OFDM-символ 0, 1 для CSI-RS RE. CSI-RS может быть использован для Управления Радиоресурсами (RRM), точного слежения за временем/частотой и/или измерения помех. В условиях эксплуатации небольших сот, где небольшие соты развернуты плотно, CSI-RS в текущем техническом описании (техническое описание LTE Rel-10/11) может быть недостаточным для выполнения этих функций, так как присутствует большое количество соседних небольших сот, которые вероятно используют ортогональные ресурсы.
[0047] Применительно к данной следующей системе LTE или расширенной системе связи, данное изобретение предусматривает то, что может быть введена новая сота несущей, в которой все или некоторые из предлагаемых обратно совместимых унаследованных сигналов и/или каналов не передаются по причинам улучшения проблемы помех между множеством сот, улучшения расширяемости несущей, и увеличения степени свободы при обеспечении расширенных возможностей. Даже несмотря на то, что предложенное изобретение главным образом описывается применительно к новой соте несущей в качестве примера, оно не ограничено только новой сотой несущей. Оно может быть также применено к унаследованным несущим без потери универсальности. Более подробно, данное изобретение рассматривает случаи, где RS конкретной соты, используемый для слежения и RRM измерения, совсем не будет передаваться или будет передаваться только по подмножеству субкадров, отличному от унаследованной несущей. Для удобства, данное изобретение показывает пример, где CRS или RS слежения передается каждые 5мс (например, в субкадре #0 и #5 в каждом радиокадре). В частности, новая несущая может относится к несущей, которая выполняет включение/выключение соты, при этом eNB выключает передачи при отсутствии прикрепленной активной UE или на основании шаблона. Если это предполагается, данное изобретение показывает пример, где PSS/SSS/CRS или сигнал обнаружения, основанный на CSI-RS, передается каждые T мс с предварительно определенным значением (например, T=200).
[0048] Применительно к данной системе LTE, к которой применяется данное изобретение, три шаблона ограниченных измерений могут быть использованы следующим образом. Шаблон 1 служит для ограниченных измерений RLM и RRM по обслуживающей соте, который применяется только к PCell, Шаблон 2 служит для ограниченных измерений RRM по некоторым внутри-частотным соседним сотам, указываемым PCI, и Шаблон 3 служит для ограниченного CSI измерения.
[0049] Данное изобретение рассматривает случаи RRM, при этом новая несущая используется либо в качестве SCell, ассоциированной с унаследованной несущей PCell, либо PCell в качестве автономной операции в предположении что CRS или RS слежения будет передан в подмножестве субкадров в каждом радиокадре или сигнал обнаружения передается в подмножестве субкадров периодически.
[0050] Когда сигнал обнаружения передается менее часто чем каждые 40 мс или максимальной продолжительности что MeasSubframePattern в 200 мс, тогда может потребоваться новый шаблон субкадра Измерения. Желательно сконфигурировать битовую карту радиокадра с начальным смещением для радиокадра и также начальным смещением для индекса субкадра. Например, битовая карта из 40 бит может представлять собой 400 мс и начальное SFN и смещение субкадра также могут быть сконфигурированы, где передается сигнал обнаружения.
[0051] Здесь, измерение RRM служит главным образом для процедуры передачи обслуживания и/или измерения качества обслуживающей соты и соседних сот. Основной мотивацией наличия ограниченных измерений в унаследованной несущей является обеспечение точных или лучших результатов измерения, когда применяется методика почти пустого субкадра (ABS), так что измерение RRM по обслуживающей соте может происходить только когда ABS сконфигурирован для источника помех.
[0052] Данное изобретение рассматривает случай, где субкадр, сконфигурированный в наборе ограниченных измерений, может не нести CRS из-за нового типа несущей или функции включения/выключения соты или по другим причинам, при этом данное изобретение предлагает методики для решения того, каким образом выполнять RRM и/или RLM в таких случаях.
[0053] Даже несмотря на то, что изобретение главным образом нацелено на новый тип несущей, оно может быть применено к унаследованной несущей и/или любой другой беспроводной технологии, где применимо. Новый тип несущей может быть задан как несущая, которая не поддерживает Rel-11 или ниже LTE UE из-за отсутствия унаследованного управления и/или сигналов. Например, как ожидается унаследованные UE принимают общий для соты RS в каждом субкадре, тогда как новая несущая может не передавать общего для соты RS из-за сокращения служебных данных или функции выключения соты. Также возможно введение нового RS, используемого для измерения, такого как CSI-RS. Данное изобретение показывает, что данный RS, в качестве MRS (RS Измерения), который может относится к любому RS для измерения UE. Когда RS измерения или сигнал обнаружения вводится с включением/выключением соты, может быть рассмотрено некоторое сетевое содействие, с тем чтобы содействовать UE в определении места RS измерения или сигнала обнаружения.
[0054] Одна причина необходимости сетевого содействия состоит в том, что сота, выполняющая включение/выключение, может передавать сигнал обнаружения, который не должен быть детектирован унаследованными UE для лучшей работы унаследованных UE, и таким образом, может быть необходима информация о дополнительном/отдельном сигнале обнаружения для детектирования соты. Другая причина сетевого содействия состоит в увеличении эффективности детектирования и измерения соты, при этом UE может иметь возможность детектирования множества сот в коротком временном кадре, так что оно может экономить энергию и сокращать время прерывания. Один пример сетевого содействия может быть рассмотрен на основании MeasObjectEUTRA (объект измерения), при этом полагается, что UE выполняет измерение следуя конфигурации как в Таблице 1.
[0055] [Таблица 1]
measType
carrierFreq
allowedMeasBandwidth
presenceAntennaPort1
MeasurementType,
ARFCN-ValueEUTRA,
AllowedMeasBandwidth,
PresenceAntennaPort1,
offsetFreq
--Список сот
cellsToRemoveList
--Требуется ON
cellsToAddModList
--Требуется ON
-- Черный список
blackCellsToRemoveList
--Требуется ON
blackCellsToAddModList
--Требуется ON
cellForWhichToReportCGI
--Требуется ON
…,
[[measCycleSCell-r10
--Требуется ON
measSubframePatternConfigNeigh-r10
MeasSubframePattemConfigNeigh-r10
- Требуется ON
]],
[[widebandRSRQ-Meas-r11
- Cond WB-RSRQ
]]
}
Q-OffsetRange ПО УМОЛЧАНИЮ 0ДБ,
CellIndexList ОПЦИОНАЛЬНО,
CellsToAddModList ОПЦИОНАЛЬНО,
CellIndexList ОПЦИОНАЛЬНО,
BlackCellsToAddModList ОПЦИОНАЛЬНО,
PhysCellld ОПЦИОНАЛЬНО,
MeasCycleSCell-r10 ОПЦИОНАЛЬНО,
ОПЦИОНАЛЬНО -
BOOLEAN ОПЦИОНАЛЬНО -
[0056] Здесь, MeasurementType (тип измерения) может быть задана как BOOLEAN (логическое), где {унаследованное измерение, усовершенствованное измерение}. Данная MeasurementType служит для организации различия в поведении UE при унаследованном измерении против расширенного измерения, как например, используя сигнал обнаружения или RS измерения.
[0057] Сначала, должно быть просигнализировано то, какой RS будет использован для измерения, за исключением того, когда один и тот же PSS/SSS/CRS используется для сигнала обнаружения и, следовательно, RS измерения всегда предполагается как CRS. Или вместо типа RS измерения может быть указан тип типа измерения (Rel-12 усовершенствованное измерение или Rel-11 унаследованное измерение). Если присутствуют разные соседи, при этом некоторые соседние соты поддерживают Rel-12 усовершенствованное измерение, тогда как некоторые соседние соты поддерживают только унаследованное измерение, могут быть сконфигурированы два набора measurementObject (объект измерения), один для унаследованного механизма, а другой для Rel-12 усовершенствованного измерения для одной и той же частоты. Если сконфигурировано два набора, отчеты могут также выполняться по отдельности. Или также возможен агрегированный отчет измерения, при этом тип измерения определяется или выбирается из расчета на соседнюю соту в зависимости от, либо типа несущей соседней соты, либо функциональности (например, поддерживается ли механизм усовершенствованного обнаружения или выполняется включение/выключение соты).
[0058] Если передается RS обнаружения или измерения, полоса пропускания MRS может быть конфигурируемой. Таким образом, необходимо сетевое указание в отношении полосы пропускания или MRS. Одним примером является использование «allowedMeasBandwidth» для указания полосы пропускания MRS передачи. Фактическая полоса пропускания передачи MRS может быть больше allowedMeasBandwidth. Тем не менее, UE будет выполнять измерение в отношении MRS из расчета на «allowedMeasBandwidth».
[0059] В качестве альтернативы, отдельная конфигурация для каждой целевой соты измерения также возможна. Если реализуется отдельная конфигурация, она может включать в себя весь или часть набора из нижеследующего как в Таблице 2.
[0060] [Таблица 2]
Полоса пропускания передачи сигнала измерения и/или частота/PRB передачи MRS
Период и/или смещение передачи сигнала измерения
ID соты и/или ID кластера и/или уникальный ID, используемый для скремблирования сигнала обнаружения
Количество портов антенны и/или используемых портов антенны
смещение SFN, если присутствует
смещение хронометража, если присутствует
количество субкадров в каждом интервале, несущем RS измерения
[0061] Как описано, Фиг. 4 показывает примерную блок-схему для выполнения управления в соответствии с примерным вариантом осуществления настоящего изобретения.
[0062] Обращаясь к Фиг. 4, UE выполняет управление посредством определения типа измерения, указывающего ограниченное измерение, и измерения сигнала измерения в сконфигурированном субкадре для ограниченных измерений в соответствии с типом измерения. Применительно к измерению, UE принимает конфигурацию измерения, включающую в себя объект усовершенствованного измерения для ограниченных измерений и объект унаследованного измерения в качестве набора, или по-отдельности принимает каждую конфигурацию для измерений (400).
[0063] Таким образом, UE может проверять, по меньшей мере, одно из следующего: тип сигнала измерения, период и/или смещение передачи сигнала измерения, ID соты целевой соты, количество субкадров в RS измерении, полосу пропускания, частоту и PRB для передачи сигнала измерения (410), здесь сигнал измерения включает в себя сигнал обнаружения или RS измерения. Тип измерения может быть установлен посредством соты в зависимости от того, находится ли сота во включенном состоянии или выключенном состоянии и является ли функциональность соты новой или унаследованной (420). При этом MRS или сигнал обнаружения принимается по полосе пропускания предварительно определенной в соответствии с целевой сотой измерения. Таким образом UE конфигурирует усовершенствованное измерение в соответствии с целевой сотой (430) и измеряет измерение RRM и/или RLM принимая во внимание включение/выключение целевой соты посредством конфигурации измерения (440).
[0064] Другими словами, данное изобретение предоставляет механизмы для выполнения относящегося к управлению радиоресурсами измерения и представления отчета в новом типе несущей, где RS для конкретной Соты может не передаваться в каждом субкадре. С этой целью, описывается измерение RRM в SCell с помощью новой несущей или соте с включением/выключением. UE данного изобретения поддерживает процедуру для прикрепления SCell по мере выполнения (1) конфигурации SCell, (2) измерения RRM, (3) активации SCell. Так как новая несущая может не нести CRS или RS Слежения (TRS) или MRS в каждом субкадре, измерение RRM будет происходить только для субкадров, несущих TRS или CRS или MRS. Потенциально возможен следующий механизм для поддержки данного изобретения.
[0065] При конфигурации SCell, требуется указать тип несущей и/или необходимую периодичность передачи CRS/TRS/MRS и смещение (если периодичность и смещение меняются) и/или полосу пропускания передачи CRS/TRS/MRS (если не полная полоса пропускания). Если это применяется, UE должно предполагать, что безотносительно конфигурации измерения RRM измерение RRM по сконфигурированной SCell происходит в субкадрах и поднесущих, которые несут CRS/TRS/MRS. В качестве альтернативы, UE может предполагать, что MRS будет передан в субкадрах, сконфигурированных для набора ограниченных измерений за исключением сконфигурированного или указанного иным образом. Тем не менее, это также требует поддержки набора ограниченных измерений в SCell.
[0066] Дополнительное ограниченное измерение RRM (и RLM) по сконфигурированной SCell конфигурируется таким образом, что UE должно выполнять RRM (и RLM) только по сконфигурированным ограниченным субкадрам. В данном случае, может быть сконфигурирован один набор из расчета на каждую SCell или может быть сконфигурирован один набор для всех SCell, принадлежащих к SeNB (содействующая eNB при двойной связи). Или один набор может быть сконфигурирован для SeNB PCell-подобной соты, а другой набор может быть сконфигурирован для каждой SCell. В данном случае, набор для PCell-подобной соты будет использоваться для основанного на сигнале обнаружения измерения, тогда как другие наборы могут быть использованы для основанного на CRS измерения.
[0067] Разрешают RRM, основанное на CSI-RS, таким образом, что измерение RRM должно происходить только на основании CSI-RS, сконфигурированного для сконфигурированной SCell. Следует отметить, что это также применяется к сигналам обнаружения, если заданы, например, как основанные на CSI-RS для обеспечения включения/выключения соты в ускоренном масштабе времени. Другими словами, безотносительно ограниченных измерений, если вводится сигнал обнаружения, измерение может быть выполнено по сигналам обнаружения.
[0068] В дополнение, когда конфигурируется конфигурация SCell, eNB указывает RS, используемый для измерения RRM, либо посредством CRS/TRS, либо CSI-RS, либо другого RS, используемого для MRS. Если eNB конфигурирует использование CRS/TRS, UE должно использовать субкадры/поднесущие, которые несут CRS/TRS на основании конфигурации или технического описания нового типа несущей. Если eNB конфигурирует использование CSI-RS, UE должно использовать сконфигурированные ресурсы CSI-RS для измерения/отчета по RRM. Если eNB конфигурирует использование MRS, UE должно использовать сконфигурированные ресурсы MRS для измерения RRM. Без конфигурации eNB, UE может выполнять измерение RRM на основании как CRS, так и MRS, если MRS отличается от CRS. UE может представлять отчет только по результатам, в отношении которых UE может успешно выполнить измерение. Например, если UE имеет возможность выполнения измерения на основании CRS, то представляется отчет измерения по CRS. Если UE имеет возможность выполнения измерения на основании MRS, то представляется отчет измерения по MRS. Если сконфигурировано, UE может также представлять оба отчета измерения. Без содействия eNB, может предполагаться, что UE вслепую пытается найти MRS и/или CRS.
[0069] Или может быть использовано Фиксированное измерение RRM по субкадрам, которые несут PSS/SSS или фиксированному подмножеству. Например, если PSS/SSS переносятся каждые 5мс, измерение RRM без какой-либо дополнительной конфигурации будет выполняться в субкадрах, несущих PSS/SSS (и возможно в центре 6RB). Или другой пример соответствует выполнению измерения по субкадру #0/#5 в каждом радиокадре по центру 6RB или центру 25RB или всей полосе пропускания системы. Это будет полезно, когда сетевое содействие по сигналам измерения не предоставляется и UE знает конфигурацию RS измерения заранее. Например, если сигнал обнаружения передается каждые 200мс, UE может искать сигнал обнаружения в центре 6RB каждые 200мс с помощью конфигурации/предположений по умолчанию.
[0070] Кроме того, для поддержки измерения внутри-частотного RRM по соседним нового типа (NCT) несущим (или новым сотам с новым типом несущей), ограниченное измерение RRM возможно, если PCI несущей NCT известен обслуживающей соте. Или, если как может ожидаться обслуживающая сота имеет одну или более несущие NCT при внутри-полосной агрегации, она может инициировать NCT RRM для внутри-полосного измерения RRM. Когда инициируется NCT RRM, от UE ожидается выполнение измерения RRM по субкадрам/поднесущим, которые несут PSS/SSS и/или CRS/TRS. UE должно игнорировать RB, в которых UE не может успешно декодировать PSS/SSS и/или CRS/TRS. Или, если инициируется NCT RRM, от UE ожидается отслеживание только субкадра #0/#5 или предварительно определенных субкадров, переносящих CRS/TRS/MRS, для измерения RRM для каждой несущей. Если RS обнаружения или измерения передается периодически, если инициируется RRM, от UE ожидается отслеживание субкадров, в которых передается RS обнаружения или измерения. В качестве альтернативы, запрос RRM может нести тип соты (унаследованная несущая или новый тип несущей), при этом новый тип несущей подразумевает, что UE должно выполнять RRM по субкадрам/RB, которые несут CRS/TRS/MRS.
[0071] При этом, когда применяется Измерение Межчастотного RRM, конфигурация ограниченного измерения RRM не поддерживается для измерения межчастотного RRM, т.е. измерение межчастотного RRM по NCT несущим может быть реализовано посредством следующих подходов.
[0072] (1) NCT RRM инициирующее событие для межчастотного RRM: когда он инициируется, UE должно предполагать, что межчастотное RRM ограничено только предварительно определенным подмножеством субкадров или субкадрами, несущими CRS/TRS/MRS, подобно измерению межчастотного RRM.
[0073] (2) UE игнорирует субкадры, в которых UE не декодирует CRS/TRS/MRS
[0074] (3) UE осуществляет RRM по субкадрам, которые несут PSS/SSS, предполагая, что PSS/SSS и TRS/CRS присутствуют в том же самом субкадре. При TDD, UE осуществляет RRM по субкадрам, которые несут SSS, предполагая, что SSS и TRS/CRS присутствуют в том же самом субкадре.
[0075] Применительно к измерению RRM соседней соты, тип соты может быть идентифицирован посредством прочтения PSS/SSS или MIB или SIB или наличия CRS/TRS/MRS в каждом субкадре или наличия DM-RS при декодировании PBCH или определении места PBCH и т.д. Как только UE идентифицирует тип соты, он может быть использован для выявления местоположения TRS/CRS/MRS для измерения RRM или RRM RS (такого как CSI-RS или CRS/TRS).
[0076] Когда конфигурируется ограниченное измерение RRM, если UE неспособно детектировать какой-либо CRS/TRS/MRS по субкадру ограниченных измерений, оно должно игнорировать субкадр для измерения RRM. Или eNB передает CRS/TRS/MRS и/или CSI-RS в зависимости от RS, используемого для RRM, в субкадре для измерения RRM. До тех пор, пока не разрешено широкополосное RSRQ, дополнительный CRS/TRS и/или CSI-RS будет ограничен центром 6RB или полосой пропускания измерения как AllowedMeasBandwidth.
[0077] Между тем, наиболее простой способ поддержки RRM по NCT состоит в добавлении предположения UE о том, что UE должно игнорировать субкадры, в которых UE не детектирует успешно CRS/TRS/MRS для измерения RRM. Или UE не должно предполагать прием CRS/TRS/MRS за исключением субкадров, сконфигурированных для ограниченных измерений. Другой подход состоит в добавлении предположения о том, что UE должно осуществлять измерение RRM по субкадрам, несущим PSS и/или SSS, предполагая, что PSS и/или SSS и TRS/CRS присутствуют в том же самом субкадре. Данное предположение может быть применено только когда инициируется NCT RRM. Другой подход состоит в добавлении предположения от том, что UE должно осуществлять измерение RRM по субкадрам, несущим сигналы обнаружения. Другая опция состоит в допущении только измерения межчастотного RRM по NCT несущим посредством конфигурирования набора ограниченных измерений. Применительно к измерению межчастотного RRM, отчет по RRM для NCT несущей может быть не точным, поскольку UE может брать образцы произвольно, которые не будут использоваться для eNB, фильтруемой на основании PCI. Данный способ не добавляет какого-либо предположения UE или другого поведения применительно к RRM соседней соты. Применительно к SCell NCT, все же может требоваться дополнительная поддержка по измерению RRM для обработки несмежной передачи CRS/TRS/MRS.
[0078] Когда рассматривается периодическая передача сигнала обнаружения, существует две возможности для унаследованных сигналов измерения, таких как CRS. Один способ состоит в пропуске передачи унаследованных сигналов измерения, а другой способ состоит все же в передаче унаследованных сигналов измерения. Когда используется второй подход, усовершенствованное UE может считывать как RS измерения, так и унаследованные сигналы измерения. В данном случае, UE может предполагать, что RS измерения обладает более высоким приоритетом над унаследованными сигналами измерения, так что измерение с помощью MRS будет использовано для отчета измерения с более высоким приоритетом. Данный приоритет может быть ограничен для UE в режиме RRC_CONNECTED, так что унаследованные сигналы измерения будут иметь более высокий приоритет над RS измерения в состоянии RRC_IDLE. Другими словами, UE должно выполнять любое измерение основанное на унаследованных сигналах измерения в режиме RRC_IDLE, тогда как MRS может быть использован с более высоким приоритетом, как только UE соединяется с сотой. Или то, какой RS используется для измерения, может конфигурироваться более высоким слоем.
[0079] Здесь, задание RSRP через TRS или сигнал обнаружения в данном изобретении, может быть задано как нижеследующее в Таблице 2.
[0080] [Таблица 2]
[0081] Задание RSRQ через TRS или сигнал обнаружения в данном изобретении может быть задано как нижеследующее в Таблице 3.
[0082] [Таблица 3]
[0083] Также RSRQ может быть вычислено, используя RSRP и RSSI из одинакового субкадра и одинаковых блоков ресурсов. Индикатор силы принимаемого сигнала (RSSI) является измерением мощности, присутствующей в принимаемой радиосигнале. Когда TRS передается периодически, могут существовать некоторые потребности для смягчения данного ограничения.
[0084] (1) Альтернатива 1: Когда UE пытается измерить RSRQ в субкадре, оно детектирует отсутствие TRS/CRS/MRS, поскольку NCT не передает CRS/TRS в этом субкадре или субкадр без TRS/CRS/MRS, UE может не измерять RSRP, тем не менее оно может измерять RSSI. В данном случае, либо UE должно использовать OFDM-символы, которые несут TRS/CRS/MRS (например, OFDM-символ 0, 4 в каждом слоте), либо UE может использовать все OFDM-символы для измерения RSSI. RSPQ вычисляется как N*RSRP (из самой последней RSRP)/RSSI(измеренный в данном субкадре).
[0085] (2) Альтернатива 2: Ограниченное измерение применяется только к RSSI. Другими словами, даже без TRS/CRS/MRS в ограниченном субкадре, UE все же измеряет RSSI (либо в OFDM-символе 0/4 в каждом слоте, либо по всем OFDM-символам). RSRP может быть измерена только в субкадрах, которые принадлежат к субкадрам TRS/CRS/MRS субкадрам ограниченного RRM. Или, в качестве альтернативы, RSRP может быть измерена безотносительно субкадров ограниченного RRM по субкадрам несущим TRS/CRS/MRS. RSRQ вычисляется как N*RSRP (из самой последней RSRP)/RSSI (измеренный в данном субкадре).
[0086] (3) Альтернатива 3: Конфигурируют отдельные субкадры ограниченного измерения RSSI, которые будут использованы для измерения RSSI, при этом субкадры ограниченного RRM/RLM будут использованы только для RSRP. RSRQ измеряется по субкадрам ограниченного RRM/RLM. RSRQ вычисляется как N*RSRP (измеренную в данном субкадре)/среднее по измеренным RSSI вплоть до данного субкадра от последнего RSRQ. Или RSSI и RSRP ограниченные субкадры могут быть сконфигурированы по-отдельности, при этом RSRQ (следует ограничению RSRP) вычисляется как N*RSRP (измеренной в данном субкадре)/RSSI (из самого последнего измерения).
[0087] В качестве альтернативы, RSRP и RSSI могут быть измерены и представлены в отчете по-отдельности. Полоса пропускания измерения для RSRP и RSSI может быть сконфигурирована по-отдельности дополнительно, если требуется.
[0088] Более того, несколько наборов ограниченных измерений RRM может быть сконфигурировано, так что также несколько наборов ограниченных измерений RSRP и/или RSSI может быть сконфигурировано по-отдельности, так что измерение из расчета на каждый набор будет представляться в отчете по-отдельности. Кроме того, UE может предполагать, что RSRP и RSSI должны быть измерены в разных субкадрах или разных блоках ресурсов.
[0089] Когда применяется ABS, Измерение RRM по NCT может быть выполнено как на Фиг. 5. Фиг. 5 показывает примерные Субкадры ABS и TRS в соответствии с примерным вариантом осуществления настоящего изобретения.
[0090] Как показано на Фиг. 5, когда конфигурируется ABS, ограниченный субкадр (или ограниченные субкадры) для RRM (и RLM) будут сконфигурированы для обеспечения лучшего измерения. Например, #0/#3/#6/#11/#15 сконфигурированы в качестве ABS источника помех так, что как ожидается UE измеряет RRM по этим субкадрам. Так как TRS будет передан в подмножестве субкадров, некоторые субкадры ABS могут не нести CRS/TRS, что может быть не пригодно для измерения RSRP.
[0091] Как объясняется ранее, все три подхода возможны для обработки данной ситуации.
[0092] (1) eNB гарантирует, что только субкадры, несущие CRS/TRS (или CSI-RS) и ABS могут содержаться в наборе ограниченных измерений. Например, #0/#15 принадлежат к набору ограниченных измерений на Фиг. 5.
[0093] (2) UE может игнорировать субкадры, по меньшей мере, для RSRP, которые не несут CRS/TRS (или CSI-RS). Либо посредством декодирования VRS/TRS (или CSI-RS), либо посредством идентификации типа соты, UE может игнорировать субкадры, по меньшей мере, для RSRP.
[0094] (3) eNB передает дополнительный TRS/CRS или CSI-RS в субкадрах для ABS и сконфигурированных для набора ограниченных измерений.
[0095] (4) Другой подход состоит в конфигурировании отдельного набора ограниченных измерений, если передается сигнал обнаружения. Например, первый набор может быть использован для ограниченных измерений на основании CRS/TRS для конфигурации ABS, а второй набор может быть использован для измерения на основании RS обнаружения и измерения.
[0096] Данное изобретение показывает Измерение Помех для Апериодического отчета по CSI или периодического отчета по CSI. Если UE сконфигурировано с помощью одного или более наборов ресурсов измерения помех (IMR) через конфигурации CSI нулевой мощности (ZP CSI) или CSI-IM проиндексированные от IMR0 до IMRk. Как ожидается, UE использует измерение помех для вычисления CSI, используя один или более IMR, если сконфигурированы. Применительно к вычислению CQI возможно два подхода.
[0097] Один состоит в том, что UE может конфигурировать некоторое количество процессов CSI, при этом каждый процесс CSI состоит из <конфигурации CSI-RS ненулевой мощности (NZP CSI-RS), IMR>, и активирует несколько процессов CSI для активного измерения. Другой состоит в том, что UE может конфигурировать конфигурацию CSI ненулевой мощности и конфигурировать несколько конфигураций IMR, а ассоциация между NZP CSI-RS и IMR может меняться динамически через сигнализацию более высокого слоя или указание DCI. Когда UE сконфигурировано с помощью нескольких конфигураций ZP CSI-RS или конфигураций IMR, от UE ожидается измерение помех для каждой конфигурации ZP CSI-RS или конфигурации IMR по отдельности, так что одно или более измерений помех (т.е. помехи от одного или более ZP CSI-RS или IMR) могут быть выбраны динамически для оценки CQI.
[0098] Применительно к периодическому отчету по CSI, если сконфигурированы наборы ограниченных измерений, IMR может быть задан из расчета на каждый набор ограниченных измерений. Например, если два набора сконфигурированы как CSI0 и CSI1, один и тот же или разный IMR может быть сконфигурирован из расчета на каждый набор CSI. Когда сконфигурирован только один IMR, UE должно предполагать то, что одинаковая конфигурация применяется ко всем наборам CSI, до тех пор, пока не сконфигурировано обратное.
[0099] Применительно к апериодическому отчету по CSI, сигнализация более высокого слоя может быть предоставлена для ассоциации IMR для NZP CSI-RS, который будет использован для апериодического отчета по CSI, или может быть использовано динамическое указание через DCI (разрешение восходящей линии связи). Например, максимальное количество IMR составляет 8, три бита могут быть добавлены к DCI разрешения восходящей линии связи (если разрешено динамическое соотнесение IMR, которое может быть возможностью UE и может быть сконфигурировано как задействованное более высоким слоем), при этом каждое значение соотносится с индексом сконфигурированных IMR, которые используются для измерения помех для вычисления CSI. Количество добавляемых битов может выбираться на основании максимального количества IMR или конфигураций IMR. Или 2 бита запроса апериодического CSI могут быть повторно использованы таким образом, что UE может быть выполнено с возможностью использования нижеследующей или сходной таблицы для обращения, когда присутствует поле запроса CSI, предполагая, что могут быть сконфигурированы три IMR.
[0100] Согласно нижеследующей Таблице 5, UE может быть инициировано, когда битовое поле запроса CSI составляет 2 бита, и инициирование апериодического отчета по CSI для одной обслуживающей соты с помощью Динамического соотнесения IMR разрешено в режиме 9 передачи (или TM, использующем DCI формат 2C в новом типе несущей).
[0101] [Таблица 5]
[0102] Как описано, Фиг. 6 и Фиг. 7 показывают примерную блок-схему для определения измерения RRM/RLM в соответствии с вариантом осуществления настоящего изобретения.
[0103] Обеспечиваются разные возможности измерения UE, когда применяется включение/выключение соты. Сначала, UE может определять, находится ли сота во включенном состоянии или в выключенном состоянии применительно к ограниченному измерению, посредством приема сигнала, включающего в себя конфигурацию измерения, сконфигурированную на основании индикатора включения/выключения соты, или отдельного сигнала для указания включения/выключения соты. Сигнал активации/деактивации Scell или конфигурации Scell может быть использован для указания включения/выключения соты, так что, когда сота активируется, UE может предположить, что сота находится во включенном состоянии.
[0104] Обращаясь к Фиг. 6, это случай, когда включение/выключение соты не известно или явно не сигнализируется UE, и в этом случае UE может предполагать что сота всегда включена. UE конфигурирует одну или более SCell, принадлежащие к SeNB (610). UE может добавлять/высвобождать Scell посредством приема конфигурации Scell. После, UE может определять, выполняется ли одно и то же измерение RRM/RLM для одной или более SCell, посредством проверки объекта измерения в соответствии с соответствующей Scell. Т.е. UE определяет, что одно и то же RRM/RLM выполняется безотносительно включения/выключения (620). Когда одно и то же измерение RRM/RLM выполняется в отношении всех сот, UE может применять ограниченное измерение RLM и RRM к обслуживающей соте(ам) в субкадре, сконфигурированном на основании Pcell (630).
[0105] Если отдельное измерение RRM/RLM выполняется из расчета на состояние соты, UE выполняет измерение посредством детектирования, по меньшей мере, сигнала измерения, передаваемого от одной или более SCell в одном или более субкадрах, сконфигурированных в соответствии с целевой сотой или сотами измерения. Здесь конфигурация измерения содержит объект измерения, включающий в себя полосу пропускания, предварительно определенную в соответствии с соответствующей Scell, а конфигурация ограниченных измерений включает в себя период и смещение измерения, и/или местоположение, основанное на ID соты и SFN (640).
[0106] Обращаясь к Фиг. 7, это случай, когда включение/выключение соты известно UE. UE конфигурирует одну или более SCell, принадлежащих к SeNB, и принимает конфигурацию включения/выключения соты для одной или более SCell (710). UE может определять, выполняется ли измерение RRM/RLM обычно или по-другому, на основании конфигурации включения/выключения соты (720). Когда одно и то же измерение RRM/RLM выполняется для всех сот, UE может применять ограниченное измерение RLM и RRM к обслуживающей соте(ам) в субкадре, сконфигурированном на основании Pcell (730). Одним из изобретения касаемо отдельного RRM/RLM в зависимости от состояния соты является использование разных сигналов измерения, доступных в каждом состоянии.
[0107] Например, основанный на CSI-RS сигнал обнаружения используется для измерения, когда сота находится в выключенном состоянии, тогда как основанный на CRS сигнал измерения используется для измерения, когда сота находится во включенном состоянии. Поскольку плотность CRS выше, чем CSI-RS, точность измерения во включенном состоянии в целом улучшается в сравнении с точностью измерения в выключенном состоянии. Поскольку важно измерить качество обслуживающей соты, в частности также для процедуры отслеживания линии радиосвязи, желательна более высокая точность измерения во включенном состоянии. Для обеспечения этого, будет полезным не явное/явное указание включенного/выключенного состояния соты. Кроме того, качество измерения, основанного на сигналах обнаружения, может быть дополнительно повышено посредством RS измерения, передаваемого во включенном состоянии (такого как CRS) для потенциальной обслуживающей соты перед ассоциацией соты с тем, чтобы гарантировать то, что качество обслуживающей соты превышает требуемое.
[0108] Когда выполняется отдельное измерение RRM/RLM, UE может дополнительно проверять, выполняется или нет измерение RRM/RLM, используя набор ограниченных измерений (720).
[0109] Если отдельное измерение RRM/RLM выполняется из расчета на состояние соты (745), UE выполняет измерение посредством детектирования, по меньшей мере, сигнала измерения, передаваемого от одной или более SCell в одном или более субкадрах, сконфигурированных в соответствии с целевой сотой или сотами измерения. Здесь конфигурация измерения содержит объект измерения, включающий в себя полосу пропускания, предварительно определенную в соответствии с соответствующей Scell, а конфигурация ограниченных измерений включает в себя период и смещение измерения, и/или местоположение, основанное на ID соты и SFN.
[0110] При этом, если отдельное измерение RRM/RLM выполняется, используя набор ограниченных измерений (747), UE может выполнять отдельное RLM из расчета на сконфигурированный набор ограниченных измерений, соответственно могут быть заданы отдельный таймер и указание, это может быть ассоциировано с включенным или выключенным состоянием соты. Набор ограниченных измерений, конфигурируемый для ABS, применительно к набору ограниченных измерений более подробно объясняется ниже. При этом сигнал измерения включает в себя сигнал обнаружения (PSS/SSS, или TRS), или опорный сигнал измерения (или MRS) применительно к ограниченному измерению. Также UE может выполнять отдельное измерение RLM из расчета на набор ограниченных измерений с отдельными таймерами и смещениями. Например, RLM по SCell в наборе ограниченных измерений может инициировать RLF, RLF может игнорироваться или представляться в отчете PCell вместо SCell как PCell.
[0111] Для обеспечения эффективных по мощности механизмов детектирования/обнаружения соты, может быть рассмотрена координированная передача сигналов обнаружения от нескольких соседних сот, предполагая, что соты синхронизированы. Таким образом, необходима координация среди сот для конфигурирования передачи сигнала обнаружения. Другими словами, мультиплексирование сигнала обнаружения среди соседних сот может быть применено в данном изобретении. Сообщение координации может включать в себя конфигурацию ресурса сигнала обнаружения и передачу сигнала обнаружения.
[0112] Сначала, конфигурации ресурса сигнала обнаружения необходимо избежать помех и максимально увеличить мультиплексирование, ортогональное распределение ресурса применительно к сигналу обнаружения. Таким образом, требуется скоординировать выбор и конфигурацию ресурса сигнала обнаружения среди сот. Одним примером сигнала обнаружения является CSI-RS и тогда ресурс сигнала обнаружения может следовать конфигурации CSI-RS. Предполагая передачу основанного на CSI-RS сигнала обнаружения, конфигурация ресурса сигнала обнаружения должна включать в себя как передающие, так и приглушающие RE. Поскольку сигнал обнаружения может быть передан наряду с передачей данных, UE требуется знать шаблон согласования скорости. Таким образом, данное изобретение предлагает сигнализацию, включающую в себя конфигурацию ZP-CSI-RS, которая включает в себя набор ресурсов CSI-RS, используемых передачей сигнала обнаружения соседних сот унаследованному UE.
[0113] Например, если три соседние соты используют конфигурацию опорного сигнала CSI 0, 1 и 2 соответственно, то UE, обслуживаемое любой сотой из трех, будет сконфигурировано с помощью конфигурации ZP-CSI-RS вида {1, 1, 1, 0, ,…}, которая указывает на то, что ресурсы, используемые для конфигурации CSI-RS 1, 2, 3, будут с нулевой мощностью. Применительно к усовершенствованному UE, список конфигураций CSI-RS или сигнала обнаружения может быть представлен таким образом, что он предполагает, что там будут передаваться сигналы обнаружения. Что касается конфигурации ресурса сигнала обнаружения, фиксированная конфигурация может быть сконфигурирована из расчета на соту или набор ресурсов будет зарезервирован для передачи сигнала обнаружения, который будет использоваться небольшими сотами в рамках кластера небольших сот, используемый для мультиплексирования нескольких передач сигнала обнаружения.
[0114] И может быть включена передача сигнала обнаружения. Если набор ресурсов резервируется для передачи сигнала обнаружения, местоположение сигнала обнаружения от каждой соты может быть изменено со временем. Местоположение сигнала обнаружения каждой соты может быть определено на основании ID соты и SFN.
[0115] Когда конфигурируется набор ограниченных измерений, ожидается, что UE также выполняет RLM по набору ограниченных измерений, когда ограниченное измерение конфигурируется для PCell. Как предложено в данном изобретении, если конфигурируется дополнительный набор ограниченных измерений, либо для PCell, либо для SCell, то необходимо задать поведение UE по RLM.
[0116] Если конфигурируется отдельное RLM из расчета на набор ограниченных измерений, UE может выполнять отдельное RLM из расчета на сконфигурированный набор ограниченных измерений. Соответственно, отдельный таймер и указание/поведение могут быть заданы, как только происходит RLF. Например, RLM по SCell набор ограниченных измерений может инициировать RLF, который будет представляться в отчете PCell вместо представления в отчете SCell так как PCell отвечает за мобильность.
[0117] Другой подход состоит в конфигурировании UE для выбора одного набора ограниченных измерений для выполнения RLM. С этой целью, конфигурируется набор измерений, который должен быть использован для измерения RLM. Кроме того, это также может быть ассоциировано с состоянием соты. Например, первый набор ограниченных измерений используется для RLM, когда сота находится во включенном состоянии, тогда как второй набор ограниченных измерений используется для RLM, когда сота находится в выключенном состоянии. В частности, когда UE находится в DRX, второй набор ограниченных измерений используется для RLM, а когда UE находится в активном состоянии (период непрерывного приема), используется первый набор ограниченных измерений. Это может быть инициировано, как только UE детектирует PDCCH для себя во время OnDuration. Или UE может использовать первый набор, когда DRX не сконфигурирован. И оно использует второй набор, когда DRX сконфигурирован. В связи с работой DRX, ожидается, что UE не принимает PDCCH и/или CRS в OnDuration, когда оно знает, что сота находится в выключенном состоянии. С этой целью, также возможна отдельная конфигурация DRX, при этом конфигурация DRX обращается к расписанию в отношении включенного и выключенного состояния соты. Это может быть одним для соты сигналом. Когда UE сконфигурировано с DRX и сконфигурировано с двумя наборами измерений, UE может предполагать, что оно может выполнять RRM и/или RLM в субкадрах, сконфигурированных любыми наборами измерений безотносительно состояния DRX. Или первый набор может быть ограничен использованием, когда UE находится в состоянии ON (Включено). Таким образом, когда UE сконфигурировано с DRX, оно не должно предполагать, что измерение может быть выполнено в любом субкадре, сконфигурированном в первом наборе ограниченных измерений.
[0118] Другая опция состоит в использовании RLM только в субкадре, при этом UE отслеживает PDCCH (или ePDCCH) безотносительно конфигурации набора измерений. Когда UE выполнено с возможность отслеживания набора субкадров в отношении ePDCCH, UE может предполагать, что оно может выполнять RLM по этим субкадрам. Фактическая конфигурация может формироваться из активации SCell и конфигурации DRX или конфигурации набора измерений. Всякий раз, когда UE может отслеживать (e)PDCCH, оно также может реализовывать функциональность RLM.
[0119] Когда набор ограниченных измерений конфигурируется для SCell, UE может предполагать, что отдельное RLM выполняется для этой SCell в дополнение к RLM для PCell, при этом RLM выполняется на основании типа RS измерения, указанного в наборе измерений (или на основании предварительной конфигурации или посредством правила) в этих сконфигурированных субкадрах.
[0120] Кроме того, когда двойная связь сконфигурирована с включением/выключением соты, как потенциально включенным в состав, нижеследующее является некоторыми ожиданиями поведения UE. Если UE сконфигурировано с помощью другого набора ограниченных измерений для SCell, в частности, данная SCell может быть PCell-подобной сотой, к которой UE передает PUCCH (например, Супер SCell или мастер SCell). Как только данный набор сконфигурирован, UE выполняет RRM и/или RLM по PCell и/или Супер SCell следуя наборам ограниченных измерений, сконфигурированных для каждой. Когда происходит RLF для SSCell или Супер SCell, оно будет сообщено обратно PCell.
[0121] В частности, данный набор для SSCell может быть набором, представляющим конфигурацию для передачи сигнала обнаружения. Если UE может быть сконфигурировано с помощью другого набора ограниченных измерений для RRM и/или RLM для любой соты. Как только оно сконфигурировано, выбор любого из наборов может быть просигнализирован более высоким слоем или может быть ассоциирован с конфигурацией DRX или состоянием соты. В частности, когда DRX не сконфигурирован, набор 0 ограниченных измерений, сконфигурированный для PCell, может быть использован для SCell измерения RRM/RLM. Другими словами, одинаковый шаблон измерения может быть применен также к SCell, когда DRX не сконфигурирован. Если DRX сконфигурирован, набор измерений, сконфигурированный для SSCell, используется для RRM/RLM. В качестве альтернативы, когда сота находится во включенном состоянии, набор 0 ограниченных измерений, сконфигурированный для PCell, может быть использован для SCell измерения RRM/RLM. Когда сота находится в выключенном состоянии, набор ограниченных измерений, сконфигурированный для SSCell используется для RRM/RLM.
[0122] Для обеспечения гибкого измерения помех, UE может быть выполнено с возможностью представления отчета по измерению RRM из расчета на блок ресурсов (RB) или группу блоков ресурсов (RBG) в рамках полосы пропускания измерения. Предполагая, что полоса пропускания измерения составляет 6RB, как только инициируется флаг RRM Из расчета на RB, ожидается, что UE представляет отчет по RSRQ из расчета на RB для обслуживающей соты или целевой соты измерения. Для измерения RSRQ из расчета на PRB, UE применяет разные подходы. Сначала, UE может измерять RSRP по полосе пропускания измерения и измерять RSSI из расчета на PRB для получения RSRQ из расчета на PRB. В качестве альтернативы, UE может измерять RSRP по каждому PRB и измерять RSSI из расчета на каждый PRB для получения RSRP из расчета на PRB. Здесь RSRP и RSRQ могут быть сообщены как обычно, а набор RSSI из расчета на PRB в рамках полосы пропускания измерения может быть сообщен отдельно.
[0123] Кроме того, опции для инициирования данного измерения RSRQ и/или RSSI служат либо для инициирования флага RRM Из расчета на RB в запросе измерения (инициирующее событие из расчета на объект измерения), либо инициирующее событие применяется ко всему измерению RRM как только произошло инициирование более высокого слоя или UE может предполагать, что RRM из расчета на PRB используется по умолчанию, когда оно детектирует сигнал обнаружения и использует сигналы обнаружения для измерения RRM, вместо нормальных каналов синхронизации и опорных сигналов, таких как PSS/SSS и RS для конкретной соты. Или дополнительный RSRQ из расчета на RB или RSSI из расчета на RB может быть задан таким образом, что он будет сообщаться посредством UE, если оно сконфигурировано для его сообщения.
[0124] Подобным образом, данное изобретение применяется к измерению из расчета на субкадр. Для обеспечения этого, количество субкадров, используемых для одного измерения RRM, задается в дополнение к полосе пропускания измерения, при этом RSRQ (и/или RSSI) предоставляется в отчете из расчета на каждый субкадр в пределах субкадров измерения по-отдельности, а не усреднено. Например, субкадры измерения составляют 5, тогда оно начинается с субкадра #0 по субкадр #4 и измерение RRM из расчета на каждый субкадр (с #0 по #4) будет предоставляться в отчете по-отдельности. Только от реализации зависит, сколько и какие радиокадры выбираются для измерения.
[0125] Фиг. 8 и Фиг. 9 показывают примерные измерения RRM из расчета на RB в соответствии с примерным вариантом осуществления настоящего изобретения.
[0126] Обращаясь к Фиг. 8, она показывает пример RSSI из расчета на PRB. Предоставляемый в отчете RSSI из расчета на PRB может быть использован для выявления помех от соседней соты, когда обслуживающая сота и соседние соты координируются для приглушения по отношению к подмножеству PRB в субкадре измерения. Например, UE проверяет и измеряет, что RSSI из расчета на PRB 1 подобен помехам от Соты 2, поскольку Сота 3 приглушена по отношению к подмножеству PRB в субкадре измерения. UE проверяет и измеряет, что RSSI из расчета на PRB 2 подобен помехам от Соты 3, поскольку Сота 1 приглушена по отношению к подмножеству PRB в субкадре измерения. UE проверяет и измеряет, что RSSI из расчета на PRB 3 подобен помехам от Соты 1, поскольку Сота 2 приглушена по отношению к подмножеству PRB в субкадре измерения.
[0127] И Фиг. 9 показывает пример RSRQ из расчета на PRB для случая трех небольших сот. Если подмножество субкадров используется для измерения RRM в синхронизированной сети, переносимый в субкадре канал обнаружения используется для измерения RRM, ожидается, что UE берет только субкадры, которые несут каналы обнаружения, вместо произвольного выбора. Кроме того, может предполагаться, что эти субкадры также несут ресурс CSI-RS. Кроме того, может предполагаться, что кластер (набор из нескольких сот) может совместно использовать одну и ту же последовательность канала обнаружения, причем каждому кластеру задается разный сигнал обнаружения.
[0128] Например, канал обнаружения может различать вплоть до N кластеров (например, 24 кластера). ID кластера может быть использован для 6 самых старших бит ID соты, причем три самых младших бита используются для уникального ID в кластере. Например, ID соты=503 (111110111) представляет собой ID кластера=62 и ID в кластере=7. Применительно к удобному измерению RRM в субкадре, у UE может быть запрошено предоставление отчета. Когда используется RSRQ для кластера, RSRP измеряется по сигналам обнаружения, RSSI по OFDM-символам, которые несут сигналы обнаружения (или по всем OFDM-символам). Когда может быть использовано индивидуальное RSRQ из расчета на соты в кластере, каждая сота в кластере передает энергию по ресурсу CSI-RS, при этом элементы ресурса CSI-RS, соответствующие четырем опорным сигналам CSI для нормального и расширенного CP соответственно, при этом индекс конфигурации CSI-RS определяется посредством ID в кластере % M (например, M=8, что является максимальным количеством ID, которое различается в кластере). Следует отметить, что ID будет использован для генерирования последовательности CSI-RS и, следовательно, UE может идентифицировать каждую соту только посредством местоположения ресурса CSI-RS.
[0129] Кроме того, другие элементы ресурса CSI-RS будут приглушены. Например, ID соты=503 и M=8, тогда конфигурация 7 CSI RS будет использована для передачи CSI-RS, а элементы ресурса конфигурации 0-6 CSI RS ID соты=503 будут приглушены. Посредством измерения RSRP при конфигурации 7 CSI RS с IMR=конфигурации 0-6 CSI RS UE может иметь возможность измерения RSRQ для ID соты=503 соты. UE будет предоставлять отчет по вплоть до M RSRQ. Когда конфликтует сигнал обнаружения и конфигурация 0-(M-1) CSI RS, сигнал обнаружения может не передаваться. Или могут быть заданы дополнительные RE, которые не конфликтуют с сигналами обнаружения для целей отдельного измерения RSRQ в кластере.
[0130] В качестве альтернативы, можно предположить, что когда UE сконфигурировано для чтения PDCCH или сигнала обнаружения, UE может выполнять измерение. Например, UE может выполнять измерение по субкадрам передачи сигнала обнаружения и DRX по продолжительностям и субкадрам, активированным посредством активации SCell или ассоциации PCell. Если UE выполняет внутри-частотное и/или межчастотное измерение на основании сигнала обнаружения или RS измерения, дополнительно может предполагаться, что частота и местоположение того RS для соседних сот может быть известно UE через явную сигнализацию или неявную сигнализацию.
[0131] Одним способом реализации данного изобретения является выравнивание передачи сигналов обнаружения среди соседних сот через сетевую синхронизацию или выравнивания таким образом, что UE в субкадрах, сконфигурированных для измерения обслуживающей соты, также может выполнять измерение соседней соты применительно к внутри-частотному режиму. В других субкадрах UE не должно предполагать, что будут передаваться сигналы измерения. Для обеспечения этого, желательно обеспечить краткосрочное измерение, при котором UE выполняет измерение на основании RS измерения только по некоторым субкадрам и в течение краткосрочного периода. Тем не менее, данное измерение может не быть достаточно эффективным для принятия решения о передаче обслуживания, поскольку оно может захватывать краткосрочное измерение, при этом долгосрочное усредненное измерение может отличаться.
[0132] Следовательно, без более жесткой точности, краткосрочное измерение может приводить к плавающим отчетам измерения, которые могут вызвать эффект «пинг-понга», если используются для решений о передаче обслуживания. Следовательно, желательно реализовывать точно такую же или лучшую эффективность с помощью нового сигнала обнаружения или RS измерения, в сравнении с унаследованной эффективностью, использующей CRS. Другая потенциальная проблема с основанным на RS измерения измерением также включает в себя случай, при котором измерение захватывает только помехи от сигналов обнаружения, если все соты находятся в выключенном состоянии или применяется приглушение. Предполагая, что небольшие соты синхронизированы в рамках кластера и небольшие соты передают основанные на CSI-RS сигналы измерения/обнаружения в субкадре одновременно. IMR или ZP-CSI-RS может быть использован для повышения эффективности сигналов обнаружения в данном случае. С точки зрения измерения RSRP, могут быть использованы только символы/RE, которые несут CSI-RS. Применительно к RSSI, тем не менее, это становится сложным, когда применяется приглушение. Одним способом является назначение IMR из расчета на каждую соту так что RSSI измеряется по сконфигурированному IMR.
[0133] Другими словами, применительно к сконфигурированному IMR для конкретной соты, только конкретная сота будет передавать данные, тогда как другие соты будут выполнять приглушение. Таким образом, посредством считывания силы сигнала в сконфигурированном IMR, UE может измерять потенциальный уровень помех от конкретной соты. Если это используется, количество требуемых конфигураций IMR может быть высоким при большом количестве соседних сот. Другой подход состоит в назначении конкретного IMR, который используется для всех сот, для создания помех за исключением конкретной соты, которая, например, будет передавать основанный на CSI-RS сигнал обнаружения. Таким образом, применительно к сигналу обнаружения от соты имеется пара конфигураций ресурсов CSI-RS и IMR, при этом позиции ресурса CSI-RS будут приглушаться другими сотами, а позиции ресурса IMR будут использоваться для передачи другими сотами. Когда несколько сот существует в кластере небольших сот, может существовать несколько конфигураций CSI-RS, как, впрочем, требуется и несколько конфигураций IMR.
[0134] Фиг. 10 является структурной схемой, показывающей систему беспроводной связи в соответствии с вариантом осуществления настоящего изобретения.
[0135] BS 1050 включает в себя процессор 1051, память 1052 и радиочастотный модуль 1053. Память 1052 связана с процессором 1051 и хранит разнообразную информацию для приведения в действие процессора 1051. RF модуль 1053 связан с процессором 1051 и передает и/или принимает радиосигнал. Процессор 1051 реализует предложенные функции, процедуры, и/или способы. В вариантах осуществления на с Фиг. 2 по Фиг. 9, работа BS может быть реализована посредством процессора 1051.
[0136] В особенности, процессор 1051 может конфигурировать одну или более Scell разными частотами, применительно к данному изобретению процессор 1051 конфигурирует конфигурации измерения для одной или более Scell. Конфигурации измерения используются для выполнения измерения по субкадрам передачи сигнала обнаружения или MRS на основании активации SCell или включений/выключения соты. Также процессор 1051 может конфигурировать конфигурацию CSI-RS для измерений RRM, при этом измерение RRM устанавливается из расчета на RB в соответствии с целевой сотой измерения, и подмножество PRB конфигурируется для измерений RRM. Другими словами, процессор 1051 может конфигурировать конфигурацию измерения, включающую в себя усовершенствованный объект измерения для ограниченного измерения и унаследованный объект измерения, и указывать тип измерения для обеспечения адаптивного выполнения измерения посредством UE.
[0137] Здесь, процессор 1051 также может генерировать набор измерений, включающий в себя измерение RLM и RRM для Pcell макро eNB (Мастер eNB) и измерение RLM и RRM для Супер SCell или Мастер SCell пико eNB (обслуживающего eNB). Также набор измерений включает в себя тип сигнала измерения, полосу пропускания и/или частоту/PRB, период и/или смещение измерения, ID соты, количество субкадров в RS измерения в соответствии с целевой сотой измерения или каждым сконфигурированным набором. Таким образом процессор 1051 может управлять передачей CRS/TRS или CSI-RS или другого RS, используемого для MRS, в сконфигурированных субкадрах с предварительно определенным PRB. Здесь процессор 1051 может конфигурировать шаблон ABS для ограниченного субкадра (или ограниченных субкадров) применительно к RRM (и/или RLM).
[0138] И процессор 1051 может конфигурировать ограниченное измерение, так что первый шаблон используется для ограниченного измерения отслеживания линии радиосвязи (RLM) и Управления Радиоресурсами (RRM) для PCell, второй шаблон используется для ограниченного измерения RRM по соте, указываемой Физическим ID Соты (PCI), или третий шаблон используется для ограниченного измерения Информации Состояния Канала (CSI).
[0139] Беспроводное устройство 1060 включает в себя процессор 1061, память 1062 и RF модуль 1063. Память 1062 связана с процессором 1061 и хранит разнообразную информацию для приведения в действие процессора 1061. RF модуль 1063 связан с процессором 1061 и передает и/или принимает радиосигнал. Процессор 1061 реализует предложенные функции, процедуры, и/или способы. В вариантах осуществления на с Фиг. 2 по Фиг. 9, работа UE может быть реализована посредством процессора 1061.
[0140] В особенности, процессор 1061 может конфигурировать одну или более сот разными частотами, применительно к данному изобретению процессор 1061 конфигурирует адаптивный набор измерений, включающий в себя усовершенствованный объект измерения для ограниченного измерения и унаследованный объект измерения и выполняет измерение, используя сигнал измерения в субкадре, сконфигурированном в ограниченном измерении в соответствии с типом измерения в конфигурации измерения.
[0141] Процессор 1061 может принимать и проверять сигнал измерения, такой как сигнал обнаружения или опорный сигнал измерения (MRS), включающий в себя CRS/TRS (или CSI-RS), в предварительно определенном PRB или ресурсах. Также процессор 1061 может принимать сигнал измерения в полосе пропускания предварительно определенной в соответствии с целевой сотой измерения. Процессор 1061 может выполнять измерение принимая во внимание то, что сота находится во включенном состоянии или выключенном состоянии применительно к ограниченному измерению.
[0142] Процессор 1061 может проверять, что ограниченное измерение включает в себя то, что первый шаблон используется для ограниченного измерения отслеживания линии радиосвязи (RLM) и Управления Радиоресурсами (RRM) для PCell, второй шаблон используется для ограниченного измерения RRM по соте, указываемой Физическим ID Соты (PCI), или третий шаблон используется для ограниченного измерения Информации Состояния Канала (CSI). Также набор измерений включает в себя набор, включающий в себя измерение RLM и RRM для Pcell первого eNB как макро eNB и измерение RLM и RRM для Супер SCell или Мастер SCell обслуживающего eNB.
[0143] Более подробно, беспроводное устройство 1060 включает в себя идентификацию информации касательно типа измерения, причем тип измерения указывает одно из первого объекта измерения и второго объекта измерения, так что беспроводное устройство 1060 выполняет измерение, используя сигнал измерения для объекта измерения, указываемый типом измерения. Конечно, беспроводное устройство 1060 может принимать и определять конфигурацию измерения от базовой станции, включающую в себя информацию соты и информацию о пером объекте измерения и втором объекте измерения, причем информация соты указывает соту, к которой применяется первый объект измерения или второй объект измерения. При этом беспроводное устройство 1060 может определять, что первый объект измерения включает в себя первое поле субкадра и первое поле ресурса измерения, при этом первое поле субкадра указывает по меньшей мере один субкадр из числа множества субкадров, в котором выполняется измерение, причем первое поле ресурса измерения указывает блок ресурса, в котором выполняется измерение, второй объект измерения включает в себя второе поле субкадра и второе поле ресурса измерения, при этом второе поле субкадра указывает по меньшей мере один субкадр из числа множества субкадров, в котором выполняется измерение, причем второе поле ресурса измерения указывающее блок ресурса, в котором выполняется измерение. Здесь, беспроводное устройство 1060 может определять, что количество субкадров, указываемое первым полем субкадра, больше количества субкадров, указываемого вторым полем субкадра.
[0144] Также беспроводное устройство 1060 может принимать информацию о типе измерения от BS или получать тип измерения посредством детектирования сигнала измерения, включающего в себя одно из следующего: сигнал обнаружения, опорный сигнал измерения (MRS) и общий для соты RS (CRS) и определять применение ограниченного измерения. Ограниченное измерение с первым объектом измерения применяется для одного из: ограниченного измерения отслеживания линии радиосвязи (RLM) и Управления Радиоресурсами (RRM) для Первичной соты (Pcell), ограниченного измерения RRM по соте, указываемой Физическим ID Соты (PCI), или ограниченного измерения Информации Состояния Канала (CSI).
[0145] Также первый объект измерения включает в себя набор, конфигурирующий измерение RLM и RRM для Первичной соты первой базовой станции и измерение RLM и RRM для Супер обслуживающей соты (Scell) или Мастер SCell второй базовой станции. Или объект измерения для измерения RLM и RRM для Супер SCell или Мастер SCell второй базовой станции конфигурируется отдельного от первого объекта измерения для измерения RLM и RRM для Первичной соты первой базовой станции. Беспроводное устройство 1060 может выполнять измерение, которое включает в себя измерение Принимаемой Мощности Опорного Сигнала (RSRP) или Принимаемого Качества Опорного Сигнала (RSRQ).
[0146] При этом беспроводное устройство 1060 может определять, когда тип измерения указывает первый объект измерения, что сота, указываемая информацией соты, является сотой прерывистой передачи (DTX) применительно к сигналу измерения, а когда тип измерения указывает второй объект измерения, что сота, указываемая информацией соты, является сотой непрерывной передачи применительно к сигналу измерения.
[0147] Также беспроводное устройство 1060 может определять, когда тип измерения указывает первый объект измерения, что сота, указываемая информацией соты, является деактивированной сотой, а когда тип измерения указывает второй объект измерения, что сота, указываемая информацией соты, является активированной сотой. Или беспроводное устройство 1060 может определять, когда тип измерения указывает первый объект измерения, что сота, указываемая информацией соты, является сотой выключенного состояния применительно к приему сигнала измерения, а когда тип измерения указывает второй объект измерения, что сота, указываемая информацией соты, является сотой включенного состояния применительно к приему сигнала измерения.
[0148] Процессор может включать в себя специализированную интегральную микросхему (ASIC), другой набор микросхем, логическую схему и/или устройство обработки данных. Память может включать в себя постоянное запоминающее устройство (ROM), запоминающее устройство с произвольной выборкой (RAM), флэш-память, карту памяти, запоминающий носитель информации и/или другое запоминающее устройство. RF модуль может включать в себя схему полосы частот исходных сигналов для обработки радиочастотных сигналов. Когда варианты осуществления реализуются в программном обеспечении, описываемые здесь методики могут быть реализованы с помощью модулей (например, процедур, функций и т.п.), которые выполняют описываемые здесь функции. Модули могут храниться в памяти и исполняться процессором. Память может быть реализована внутри процессора или быть внешней по отношению к процессору и в этом случае, она может быть коммуникативно связана с процессором через различные средства, как известно в области техники.
[0149] В вышеприведенных примерных системах, несмотря на то, что способы были описаны на основе блок-схем, используя ряд этапов и блоков, настоящее изобретение не ограничивается последовательностью этапов, и некоторые этапы могут быть выполнены в других последовательностях от оставшихся этапов или могут быть выполнены одновременно с оставшимися этапами. Кроме того, специалисты в соответствующей области техники будут понимать, что этапы, показанные в блок-схемах, не являются исключительными и могут включать в себя другие этапы или один или более этапы блок-схемы могут быть удалены, не оказывая влияния на объем настоящего изобретения.
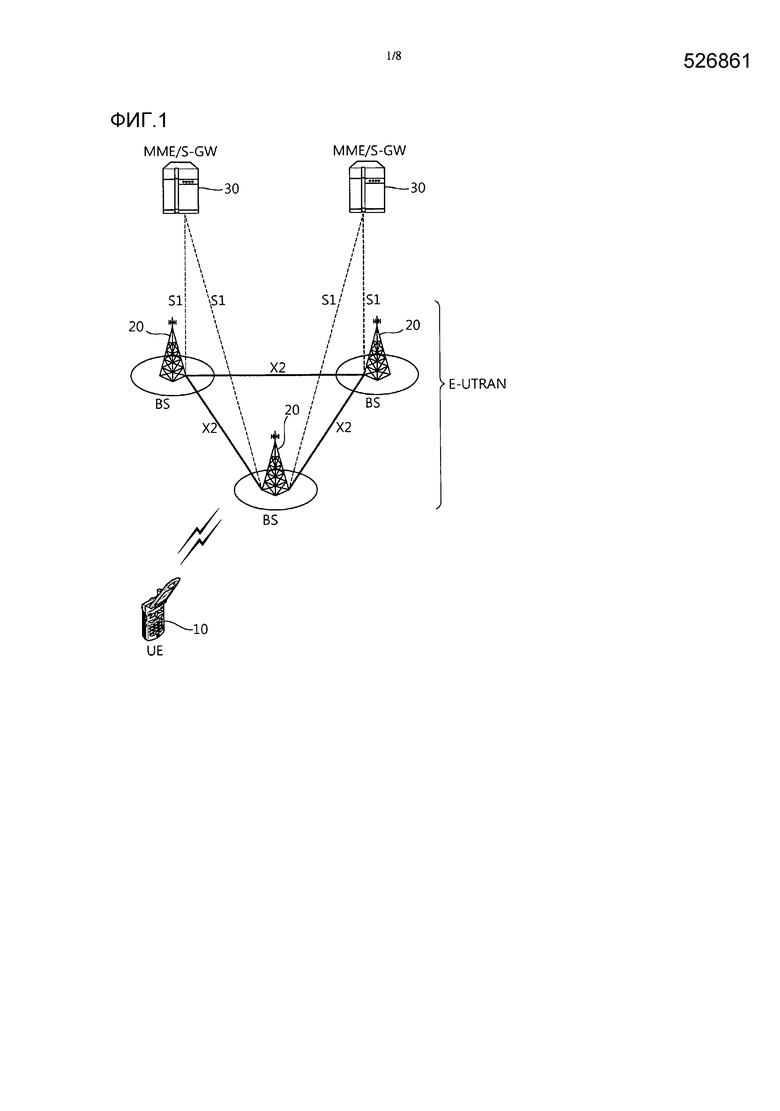
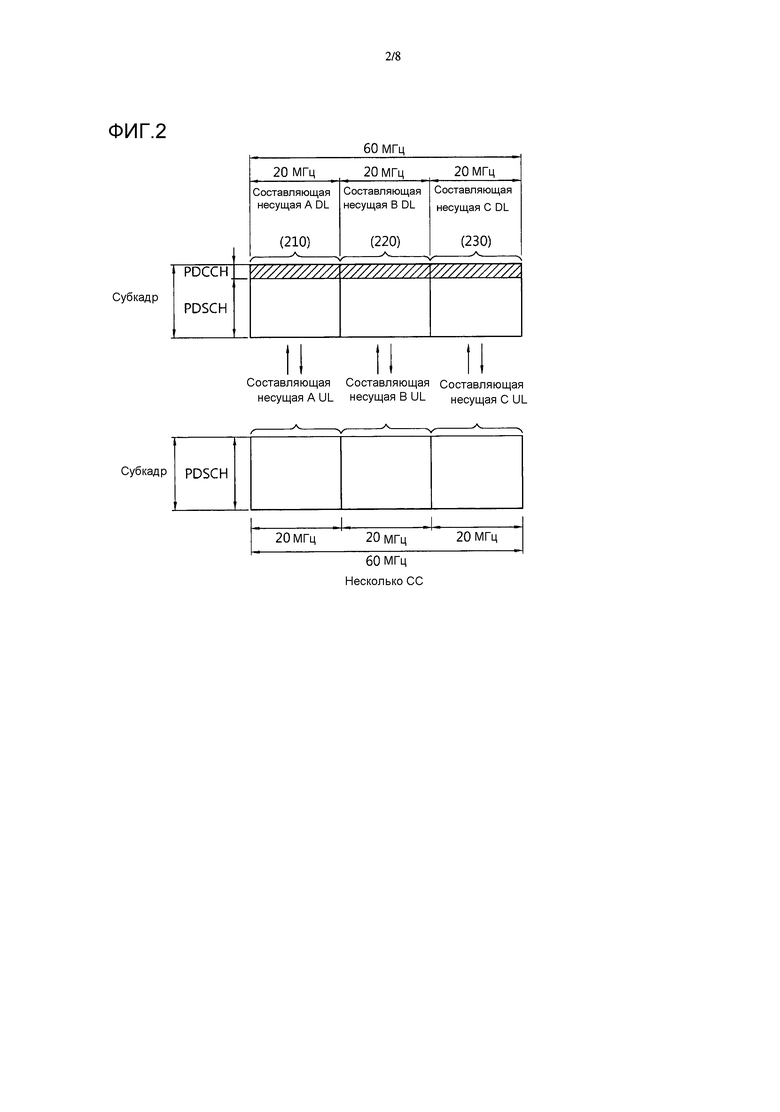
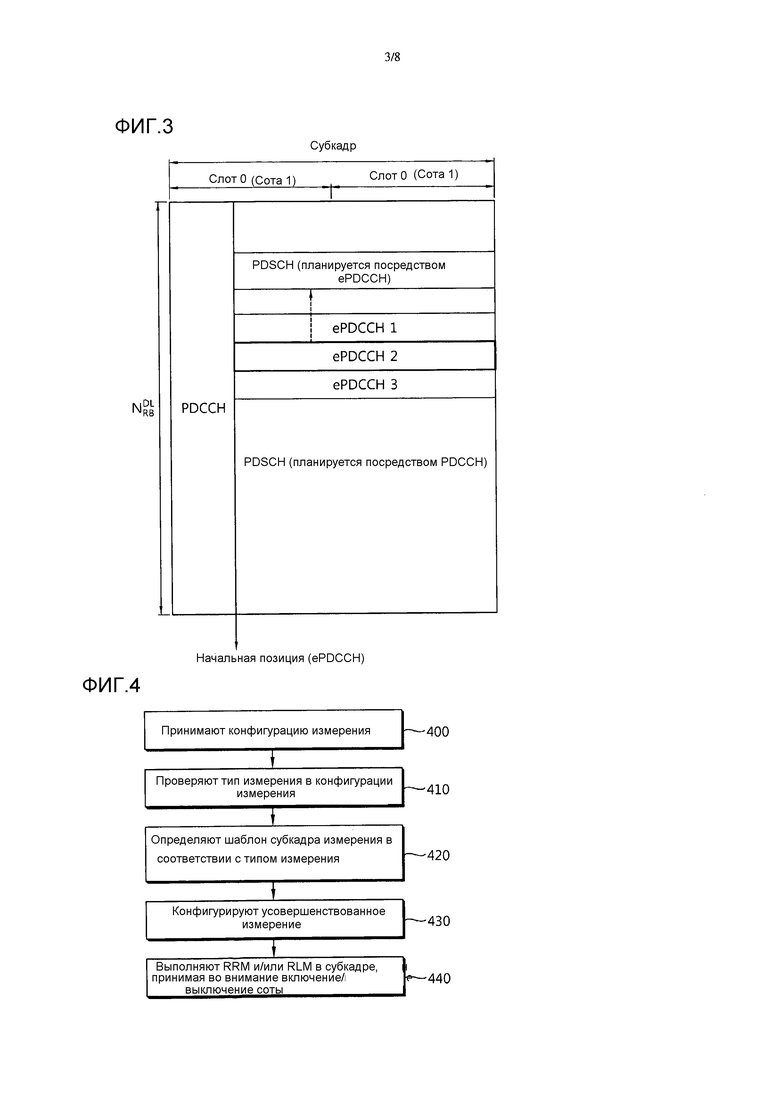
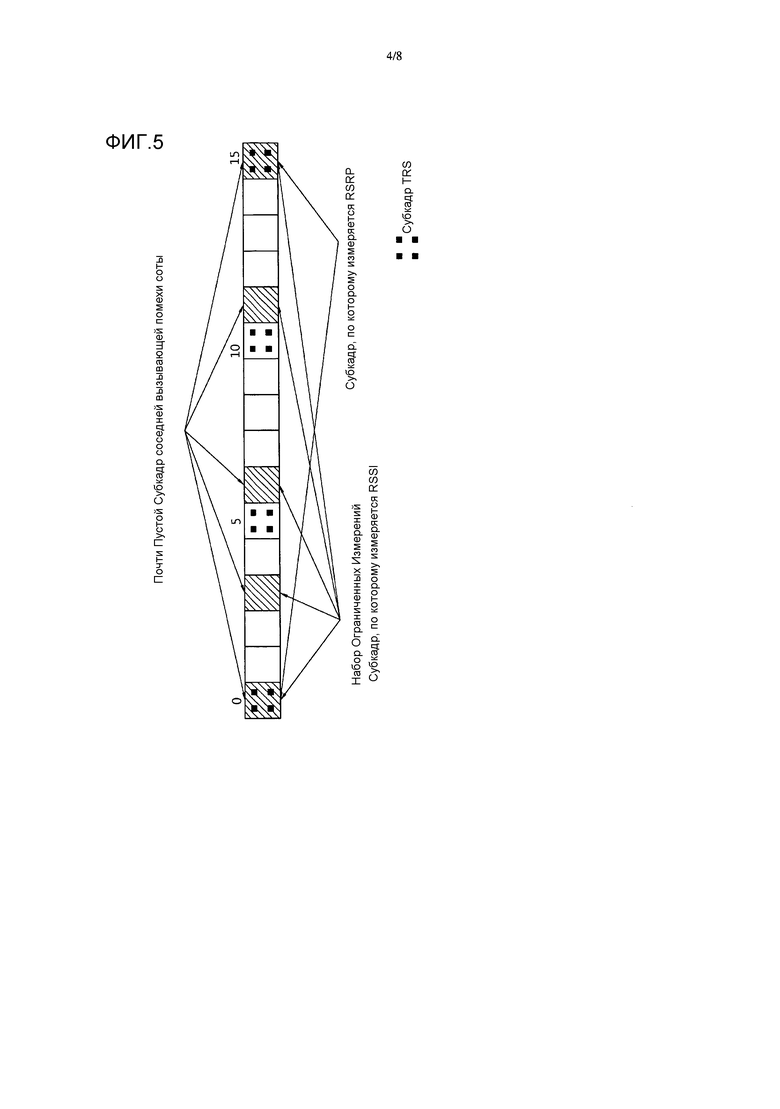
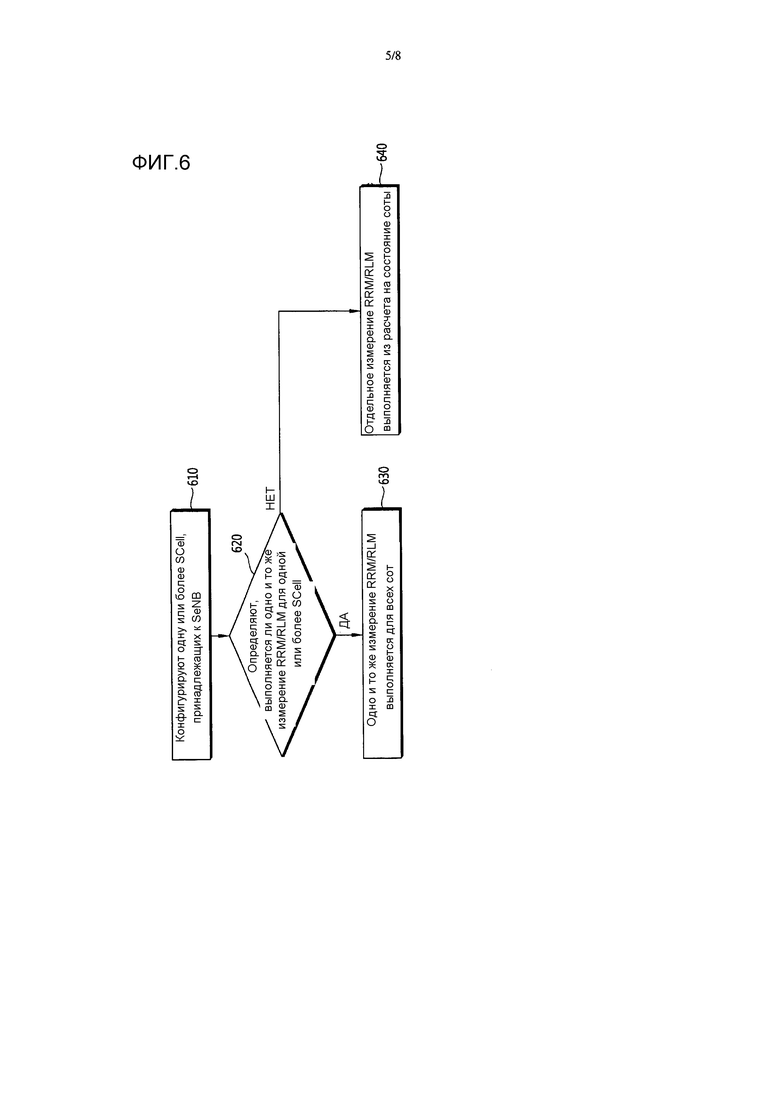
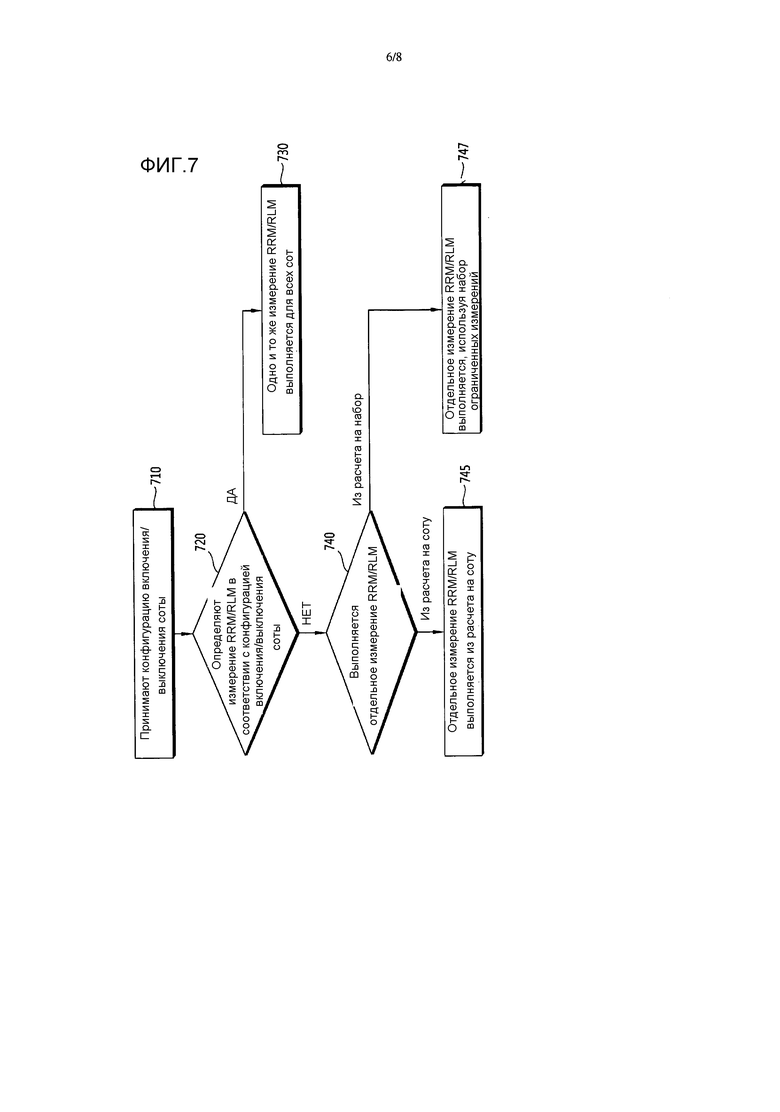
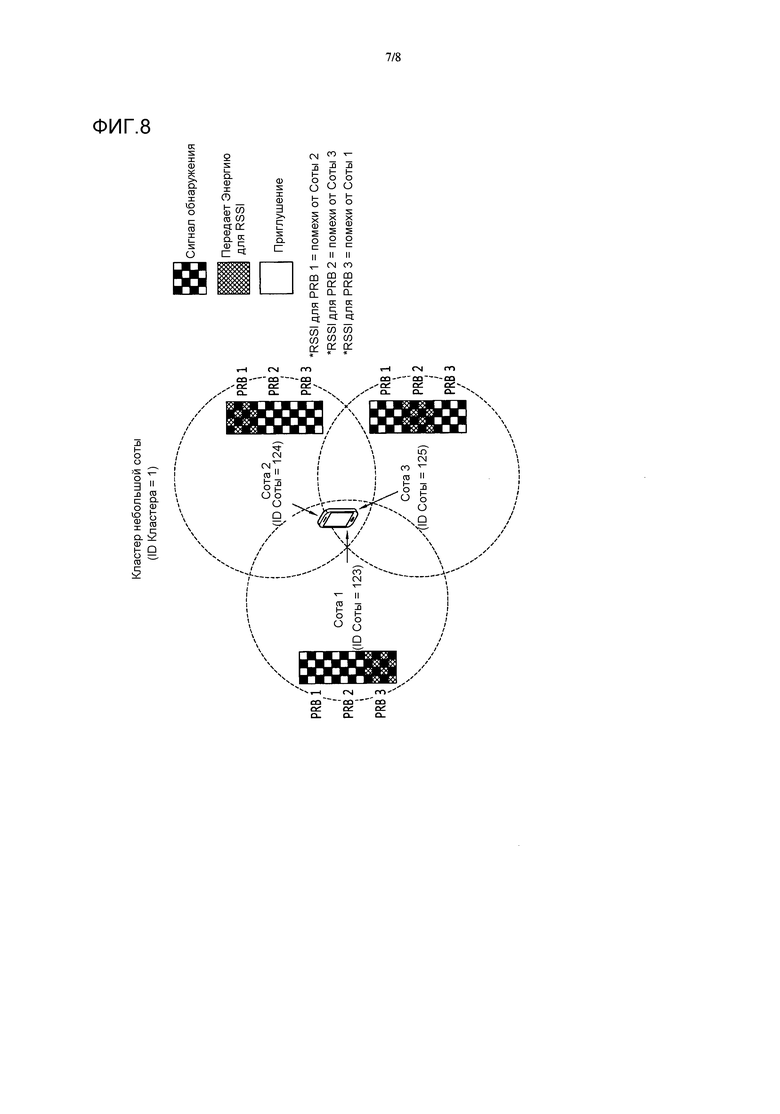
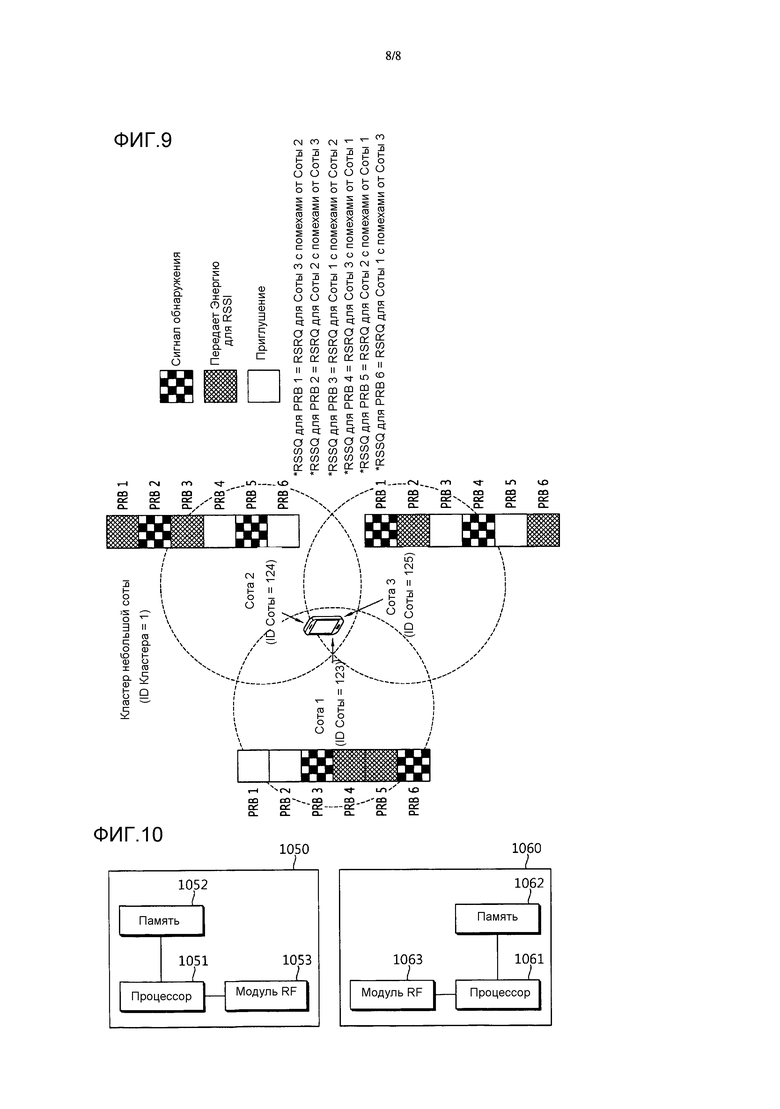
Изобретение относится к технике связи и может использоваться в системах беспроводной связи. Технический результат состоит в повышении точности измерения. Для этого предлагается способ и устройство для выполнения измерения в системе беспроводной связи. Беспроводное устройство определяет информацию касательно типа измерения, причем тип измерения указывает один из первого объекта измерения и второго объекта измерения, и выполняет измерение, используя сигнал измерения в субкадре(ах), сконфигурированном в объекте измерения, указываемом типом измерения. Сигнал измерения включает в себя одно из сигнала обнаружения, опорного сигнала измерения (MRS) и общего для соты RS (CRS). 2 н. и 4 з.п. ф-лы, 10 ил.
1. Способ выполнения измерения на пользовательском устройстве (UE) в системе мобильной связи, содержащий этапы, на которых:
принимают на UE информацию конфигурации измерения сигнала обнаружения, принимаемого от вторичной соты, при этом информация конфигурации измерения указывает частоту сигнала обнаружения, периодичность сигнала обнаружения и смещение субкадра сигнала обнаружения, причем информация конфигурации измерения принимается через сообщение управления радиоресурсами (RRC); и
выполняют на UE измерение радиоресурса по символам мультиплексирования с ортогональным частотным разделением (OFDM), которые несут сигнал обнаружения,
при этом измерение радиоресурса включает в себя измерение принимаемой мощности опорного сигнала (RSRP) или измерение индикатора силы принимаемого сигнала (RSRI).
2. Способ по п. 1, в котором вторичная сота сконфигурирована выключаться по запросу выключения соты.
3. Способ по п. 1, в котором сигнал обнаружения включает в себя первичный сигнал синхронизации (PSS), вторичный сигнал синхронизации (SSS) и опорный сигнал, зависимый от соты (CRS).
4. Пользовательское устройство (UE), выполняющее измерение в системе мобильной связи, при этом UE содержит:
приемопередатчик, выполненный с возможностью приема радиосигнала; и
процессор, выполненный с возможностью:
приема информации конфигурации измерения сигнала обнаружения, принимаемого от вторичной соты, при этом информация конфигурации измерения указывает частоту сигнала обнаружения, периодичность сигнала обнаружения и смещение субкадра сигнала обнаружения, причем информация конфигурации измерения принимается через сообщение управления радиоресурсами (RRC), и
выполнения измерения радиоресурса по символам мультиплексирования с ортогональным частотным разделением (OFDM), которые несут сигнал обнаружения,
при этом измерение радиоресурса включает в себя измерение принимаемой мощности опорного сигнала (RSRP) или измерение индикатора силы принимаемого сигнала (RSRI).
5. UE по п. 4, при этом вторичная сота сконфигурирована выключаться по запросу выключения соты.
6. UE по п. 4, при этом сигнал обнаружения включает в себя первичный сигнал синхронизации (PSS), вторичный сигнал синхронизации (SSS) и опорный сигнал, зависимый от соты (CRS).
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ С ИСПОЛЬЗОВАНИЕМ МНОЖЕСТВА НЕСУЩИХ | 2004 |
|
RU2372748C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

