Область техники, к которой относится изобретение
[1] Это описание изобретения относится к способу приема управляющей информации, используемой для опорного сигнала обнаружения, более конкретно, к способу приема конфигурационной информации, используемой для измерения опорного сигнала обнаружения в абонентском устройстве (UE).
Уровень техники
[2] Стандарт долгосрочного развития (LTE) Партнерского проекта третьего поколения (3GPP), который представляет собой набор улучшений в универсальную систему мобильной связи (UMTS), вводится в качестве 3GPP версия 8. 3GPP LTE использует множественный доступ с ортогональным частотным разделением каналов (OFDMA) для нисходящей линии связи и использует множественный доступ с частотным разделением каналов с одной несущей (SC-FDMA) для восходящей линии связи и приспосабливает технологию cо многими входами и многими выходами (MIMO) максимум с четырьмя антеннами. В последние годы, ведется постоянное обсуждение усовершенствованного стандарта 3GPP LTE (LTE-A), который является основным улучшением в 3GPP LTE.
[3] В последние годы ускоряется коммерциализация 3GPP LTE(A)-системы. LTE-системы распространяются быстрее, поскольку они реагируют на потребность пользователей в услугах, которые позволяют поддерживать более высокое качество и более высокую пропускную способность при обеспечении мобильности, а также услуги передачи речи. LTE-система обеспечивает низкую задержку на передачу, высокую скорость передачи и пропускную способность системы и улучшенное покрытие.
[4] Чтобы увеличивать пропускную способность для потребности пользователей в услугах, увеличение полосы пропускания может быть важным, разработана технология агрегирования несущих (CA) или агрегирование ресурсов по внутриузловым несущим или межузловым несущим, нацеленная на получение такого эффекта, как если используется логически более широкая полоса пропускания, посредством группировки множества физически прерывистых полос частот в частотной области, чтобы эффективно использовать фрагментированные небольшие полосы частот. Отдельные единичные несущие, сгруппированные посредством агрегирования несущих, известны как компонентная несущая (CC). Для межузлового агрегирования ресурсов, для каждого узла, может устанавливаться группа несущих (CG), причем одна CG может иметь несколько CC. Каждая CC задается посредством одной полосы пропускания и центральной частоты.
[5]
[6] В последнее время, конфигурация беспроводных сетей доступа изменена таким образом, что различные типы небольших сот, имеющих небольшие размеры, такие как пикосота, фемтосота и т.д., взаимодействуют с макросотой, имеющей относительно большой размер. Конфигурация беспроводных сетей доступа нацелена на предоставление высокоскоростной передачи данных в конечные UE и за счет этого повышение фактического качества услуг (QoE) для конечных UE в ситуации, в которой многоуровневые соты сосуществуют в иерархической структуре, по существу заключающей в себе макросоту.
[7] Согласно одной из текущих категорий стандартизации Партнерского проекта третьего поколения (3GPP), улучшения небольших сот для E-UTRA и E-UTRAN SI; например, RP 122033, улучшение сценариев в помещениях/вне помещений с использованием узлов с низким уровнем мощности обсуждается с названием "улучшение небольших" сот. Помимо этого, сценарии и требования для улучшения небольших сот описываются в 3GPP TR 36.932.
[8] Между тем, использование небольшой соты в настоящее время растет во многих областях техники, таких как пикосоты, небольшие соты в режиме сдвоенного подключения и т.д. Чтобы надлежащим образом осуществлять связь между небольшими сотами и UE, обсуждаются улучшения, связанные с традиционными управляющими сигналами, такими как опорные сигналы и синхронные сигналы.
[9] Сущность изобретения
Техническая задача
[10] В последнее время, обсуждается ряд вопросов относительно опорного сигнала обнаружения (DRS). Цель настоящего описания изобретения заключается в том, чтобы способ и устройство для предоставления усовершенствованной схемы, чтобы поддерживать DRS в беспроводной связи. Подробно, настоящее описание изобретения предлагает подробные варианты осуществления, связанные с возможными вариантами, которые могут использоваться в качестве DRS. Дополнительно, настоящее описание изобретения предлагает прояснение и/или вариант осуществления относительно совмещения между интервалом отсутствия сигнала для измерений и DRS. Дополнительно, настоящее описание изобретения предлагает вариант осуществления конфигураций, связанных с синхронизацией измерений DRS. В таком варианте осуществления, подробные конфигурационные элементы задаются в расчете на каждую частоту, которая соответствует соте. Настоящее описание изобретения предлагает прояснение и/или вариант осуществления относительно неправильного совмещения относительно числа сот. Настоящее описание изобретения также предлагает прояснение и/или вариант осуществления относительно улучшенного уменьшения помех и адаптации трафика (eIMTA), которое динамически изменяет конфигурацию дуплекса с временным разделением каналов (TDD) в контексте DRS-операций.
[11] Относительно вышеуказанных целей настоящего описания изобретения, следует отметить, что настоящее описание изобретения далее предлагает ряд дополнительных признаков, и вышеуказанные цели вводятся в примерных целях, и в силу этого цели настоящего описания изобретения не ограничены вышеприведенными целями.
[12] Техническое решение
[13] Вариант осуществления настоящего описания изобретения заключается в том, чтобы предоставлять способ приема управляющей информации для приема сигнала в системе беспроводной связи, причем способ осуществляется посредством абонентского устройства (UE). Дополнительно, настоящее описание изобретения также предлагает беспроводное устройство, например, UE, для того чтобы осуществлять предложенный способ.
[14] Предпочтительно, UE выполнено с возможностью приема конфигурации измерений для сигнала обнаружения, при этом сигнал обнаружения включает в себя конкретный для соты опорный сигнал (CRS), сигнал первичной синхронизации (PSS) и сигнал вторичной синхронизации (SSS).
[15] Помимо этого, сигнал обнаружения дополнительно может включать в себя опорный сигнал информации состояния канала (CSI-RS) в зависимости от конфигурации CSI-RS.
[16] Конфигурация измерений может включать в себя, по меньшей мере, один набор конфигурационных элементов, причем каждый набор конфигурационных элементов задается в расчете на частоту соответствующей соты. Подробно, каждый набор конфигурационных элементов указывает период измерений сигнала обнаружения, смещение периода измерений и длительность измерений, в течение которой UE измеряет сигнал обнаружения в одном периоде для периода измерений.
[17] Предпочтительно, конфигурация измерений для сигнала обнаружения принимается через сообщение по протоколу управления радиоресурсами (RRC). Кроме того, RRC-сообщение принимается в UE, находящемся в режиме RRC-соединения. Измерение для сигнала обнаружения начинается в первом субкадре, переносящем SSS в одном периоде для периода измерений. Дополнительно, набор конфигурационных элементов, заданных для одной частоты, содержит один период измерений, одно смещение и одну длительность измерений. Каждый набор конфигурационных элементов применяется ко множеству сот, имеющих идентичную частоту.
[18] UE выполнено с возможностью выполнения измерения для сигнала обнаружения на основе периода измерений сигнала обнаружения, смещения периода измерений и длительности измерений.
[19] Дополнительно, UE дополнительно может содержать: прием конфигурации интервалов отсутствия сигнала для измерений, указывающей длину и период повторения интервала отсутствия сигнала для измерений, при этом период измерений сигнала обнаружения задается как кратное число периода повторения интервала отсутствия сигнала для измерений.
[20] Дополнительно, измерение UE для сигнала обнаружения выполняется только для TDD-субкадра нисходящей линии связи, выделяемого посредством SIB, когда улучшенное уменьшение помех и адаптация трафика (eIMTA) используется для UE.
[21] Дополнительно, UE дополнительно может содержать прием конфигурации опорных сигналов информации состояния канала (CSI-RS), включающей в себя, по меньшей мере, один набор конфигурационных CSI-RS-элементов, используемых для CSI-RS с нулевой мощностью. CSI-RS-конфигурация включает в себя множественный набор конфигурационных CSI-RS-элементов, каждый набор конфигурационных CSI-RS-элементов включает в себя информацию CSI-RS-интервала и информацию CSI-RS-смещения, и каждый набор конфигурационных CSI-RS-элементов отдельно сконфигурирован.
[22] Дополнительно, UE, ожидающее принимать MBMS-субкадр(ы) и/или MBMS-услугу, не может ожидать принимать сигнал обнаружения в соответствующем субкадре.
[23] При выполнении вышеописанных вариантов осуществления, номер системного кадра (SFN) макросоты UE используется в качестве опорного в течение определенной длительности, когда UE выполняет измерение для сигнала обнаружения.
[24] Преимущества изобретения
[25] Согласно настоящему описанию изобретения, предложен улучшенный пример, проясняющий возможные варианты, которые могут использоваться в качестве DRS. Дополнительно, улучшенный пример, проясняющий совмещение между интервалом отсутствия сигнала для измерений и DRS, предложен в настоящем описании изобретения. Дополнительно, предложен улучшенный пример, связанный с конфигурацией, связанной с синхронизацией измерений DRS. Дополнительно, предложен улучшенный пример, связанный с конфигурацией, связанной с синхронизацией измерений DRS. Дополнительно, предложен улучшенный пример относительно неправильного совмещения относительно числа сот. Кроме того, улучшенный пример, связанный с eIMTA, предложен в настоящем описании изобретения.
Краткое описание чертежей
[26] Фиг. 1 показывает систему беспроводной связи, к которой применяется настоящее описание изобретения.
[27] Фиг. 2 показывает примерный принцип для технологии агрегирования несущих (CA) согласно примерному варианту осуществления настоящего описания изобретения.
[28] Фиг. 3 показывает структуру радиокадра, к которому применяется настоящее описание изобретения.
[29] Фиг. 4 показывает пример сигнала синхронизации, который используется в базовом CP и расширенном CP.
[30] Фиг. 5 показывает схему формирования кода, связанного с подсинхронным сигналом (SSS).
[31] Фиг. 6 показывает пример многоузловой системы.
[32] Фиг. 7 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует один антенный порт.
[33] Фиг. 8 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует два антенных порта.
[34] Фиг. 9 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует четыре антенных порта.
[35] Фиг. 10 показывает пример RB, в который преобразуется CSI-RS.
[36] Фиг. 11 показывает пример измерения UE, выполняемого для DRS согласно одному примеру настоящего описания изобретения.
[37] Фиг. 12 показывает пример PSS/SSS-мультиплексирования с временным разделением каналов.
[38] Фиг. 13 показывает другой пример PSS/SSS-мультиплексирования с временным разделением каналов.
[39] Фиг. 14 показывает возможные варианты местоположений DRS-PSS и DRS-SSS согласно одному аспекту настоящего описания изобретения.
[40] Фиг. 15 показывает DRS-RS-шаблон на основе CRS согласно настоящему описанию изобретения.
[41] Фиг. 16 показывает определенное число конфигураций интервалов отсутствия сигнала для измерений, предложенных посредством настоящего описания изобретения.
[42] Фиг. 17 показывает дополнительные варианты осуществления, связанные с конфигурациями интервалов отсутствия сигнала для измерений, предложенными посредством настоящего описания изобретения.
[43] Фиг. 18 показывает взаимосвязь между измерением UE для DRS и интервалом отсутствия сигнала для измерений.
[44] Фиг. 19 показывает блок-схему, которая кратко описывает систему беспроводной связи, включающую в себя UE 1900 и BS или соту 2000.
[45] Оптимальный режим осуществления изобретения
[46] Фиг. 1 показывает систему беспроводной связи, к которой применяется настоящее описание изобретения. Система беспроводной связи также может упоминаться в качестве усовершенствованной наземной сети радиодоступа UMTS (E-UTRAN) или системы по стандарту долгосрочного развития (LTE)/LTE-A.
[47] E-UTRAN включает в себя, по меньшей мере, одну базовую станцию 20 (BS), которая предоставляет плоскость управления и пользовательскую плоскость для абонентского устройства 10 (UE). UE 10 может быть стационарным или мобильным и может упоминаться в качестве других терминов, таких как мобильная станция (МС), пользовательский терминал (UT), абонентская станция (SS), мобильный терминал (MT), беспроводное устройство и т.д. BS 20, в общем, представляет собой стационарную станцию, которая обменивается данными с UE 10, и может упоминаться в качестве других терминов, таких как усовершенствованный узел B (eNB), приемо-передающая подсистема базовой станции (BTS), точка доступа, сота, узел B или узел и т.д.
[48] Схемы со множественным доступом, применяемые к системе беспроводной связи, не ограничены. А именно, могут использоваться различные схемы со множественным доступом, такие как CDMA (множественный доступ с кодовым разделением каналов), TDMA (множественный доступ с временным разделением каналов), FDMA (множественный доступ с частотным разделением каналов), OFDMA (множественный доступ с ортогональным частотным разделением каналов), SC-FDMA (FDMA с одной несущей), OFDM-FDMA, OFDM-TDMA, OFDM-CDMA и т.п. Для передачи по восходящей линии связи и передачи по нисходящей линии связи, может использоваться схема TDD (дуплекса с временным разделением каналов), в которой передача выполняется посредством использования различного времени, или схема FDD (дуплекса с частотным разделением каналов), в которой передача выполняется посредством использования различных частот.
[49] BS 20 соединяются между собой посредством X2-интерфейса. BS 20 также соединены посредством S1-интерфейса с усовершенствованным ядром 30 пакетной коммутации (EPC), более конкретно, с объектом управления мобильностью (MME) через S1-MME и с обслуживающим шлюзом (S-GW) через S1-U.
[50] EPC 30 включает в себя MME, S-GW и шлюз сети пакетной передачи данных (P-GW). MME имеет информацию по доступу UE или информацию характеристик UE, и эта информация, в общем, используется для управления мобильностью UE. S-GW представляет собой шлюз, имеющий E-UTRAN в качестве конечной точки. P-GW представляет собой шлюз, имеющий PDN в качестве конечной точки.
[51] Уровни радиоинтерфейсного протокола между UE и сетью могут классифицироваться на первый уровень (L1), второй уровень (L2) и третий уровень (L3) на основе трех нижних уровней модели взаимодействия открытых систем (OSI), которая известна в системе связи. Из них, физический уровень (PHY), принадлежащий первому уровню, предоставляет услугу передачи информации посредством использования физического канала, а уровень управления радиоресурсами (RRC), принадлежащий третьему уровню, служит для того, чтобы управлять радиоресурсом между UE и сетью. Для этого, RRC-уровень обменивается RRC-сообщением между UE и BS.
[52] Более подробно, поясняется архитектура протоколов радиосвязи для пользовательской плоскости (U-плоскости) и плоскости управления (C-плоскости). PHY-уровень предоставляет для верхнего уровня услугу передачи информации через физический канал. PHY-уровень соединяется уровнем управления доступом к среде (MAC), который является верхним уровнем для PHY-уровня, через транспортный канал. Данные передаются между MAC-уровнем и PHY-уровнем через транспортный канал. Транспортный канал классифицирован согласно тому, как и с какими характеристиками данные передаются через радиоинтерфейс. Между различными PHY-уровнями, т.е. PHY-уровнем передающего устройства и PHY-уровнем приемного устройства, данные передаются через физический канал. Физический канал может модулироваться с использованием схемы мультиплексирования с ортогональным частотным разделением каналов (OFDM) и может использовать время и частоту в качестве радиоресурса.
[53] Функции MAC-уровня включают в себя преобразование между логическим каналом и транспортным каналом и мультиплексирование/демультиплексирование для транспортного блока, предоставляемого в физический канал по транспортному каналу служебной MAC-единицы данных (SDU), принадлежащей логическому каналу. MAC-уровень предоставляет услуги для уровня управления радиосвязью (RLC) через логический канал.
[54] Функции RLC-уровня включают в себя конкатенацию, сегментацию и повторную сборку RLC SDU. Чтобы обеспечивать различное качество обслуживания (QoS), требуемое посредством однонаправленного радиоканала (RB), RLC-уровень предоставляет три рабочих режима, т.е. прозрачный режим (TM), режим без подтверждения приема (UM) и режим с подтверждением приема (AM). AM RLC предоставляет коррекцию ошибок посредством использования автоматического запроса на повторную передачу (ARQ).
[55] Функции уровня протокола конвергенции пакетных данных (PDCP) в пользовательской плоскости включают в себя доставку пользовательских данных, сжатие заголовков и шифрование. Функции PDCP-уровня в плоскости управления включают в себя доставку данных и шифрование/защиту целостности в плоскости управления.
[56] Уровень управления радиоресурсами (RRC) задается только в плоскости управления. RRC-уровень служит для того, чтобы управлять логическим каналом, транспортным каналом и физическим каналом в ассоциации с конфигурированием, переконфигурированием и высвобождением однонаправленных радиоканалов (RB). RB представляет собой логический тракт, предоставленный посредством первого уровня (т.е. PHY-уровня) и второго уровня (т.е. MAC-уровня, RLC-уровня и PDCP-уровня) для доставки данных между UE и сетью.
[57] Установление RB подразумевает процесс для указания уровня протоколов радиосвязи и свойств канала, чтобы предоставлять конкретные услуги, и для определения соответствующих подробных параметров и операций. RB может классифицироваться на два типа, т.е. на служебный RB (SRB) и RB передачи данных (DRB). SRB используется в качестве тракта для передачи RRC-сообщения в плоскости управления. DRB используется в качестве тракта для передачи пользовательских данных в пользовательской плоскости.
[58] Когда RRC-соединение устанавливается между RRC-уровнем UE и RRC-уровнем сети, UE находится в состоянии RRC-соединения (оно также может упоминаться в качестве режима RRC-соединения), а в противном случае UE находится в состоянии RRC-бездействия (оно также может упоминаться в качестве режима RRC-бездействия).
[59] Фиг. 2 показывает примерный принцип для технологии агрегирования несущих (CA) согласно примерному варианту осуществления настоящего описания изобретения.
[60] Ссылаясь на фиг. 2, проиллюстрирована структура субкадра нисходящей линии связи (DL)/восходящей линии связи (UL), рассматриваемая в системе 3GPP LTE-A (по усовершенствованному стандарту LTE), в которой несколько CC агрегируются (в этом примере, существуют 3 несущие), UE может отслеживать и принимать DL-сигнал/данные из нескольких DL CC одновременно. Тем не менее, даже если сота управляет N DL CC, сеть может конфигурировать UE с M DL CC, где M≤N, так что отслеживание посредством UE DL-сигнала/данных ограничено этими M DL CC. Помимо этого, сеть может конфигурировать L DL CC в качестве основных DL CC, из которых UE должно отслеживать/принимать DL-сигнал/данные с приоритетом, конкретно для UE или конкретно для соты, где L≤M≤N. Таким образом, UE может поддерживать одну или более несущих (несущую 1 или дополнительные несущие 2,..., N) согласно характеристикам UE.
[61] Несущая или сота может разделяться на первичную компонентную несущую (PCC) и вторичную компонентную несущую (SCC) в зависимости от того, активируются они или нет. PCC всегда активируется, а SCC активируется или деактивируется согласно конкретным условиям. Иными словами, PCell (первичная обслуживающая сота) представляет собой ресурс, в котором UE первоначально устанавливает соединение (или RRC-соединение) между несколькими обслуживающими сотами. PCell служит в качестве соединения (или RRC-соединения) для передачи служебных сигналов относительно множества сот (CC) и представляет собой специальную CC для управления контекстом UE, который является информацией соединения, связанной с UE. Дополнительно, когда PCell (PCC) устанавливает соединение с UE и в силу этого находится в режиме RRC-соединения, PCC всегда существует в состоянии активации. SCell (вторичная обслуживающая сота) представляет собой ресурс, назначаемый UE, отличный от PCell (PCC). SCell представляет собой расширенную несущую для дополнительного назначения ресурсов и т.д., в дополнение к PCC, и может разделяться на состояние активации и состояние деактивации. SCell находится первоначально в состоянии деактивации. Если SCell деактивируется, она включает в себя отсутствие передачи зондирующего опорного сигнала (SRS) по SCell, отсутствие сообщения индикатора качества канала (CQI)/индикатора матрицы предварительного кодирования (PMI)/индикатора ранга (RI)/идентификатора транзакции процедуры (PTI) для SCell, отсутствие передачи по UL-SCH по SCell, отсутствие отслеживания PDCCH по SCell, отсутствие отслеживания PDCCH на предмет SCell. UE принимает элемент MAC-управления активацией/деактивацией в этом TTI, активирующий или деактивирующий SCell.
[62] Чтобы повышать пользовательскую пропускную способность, также рассматривается обеспечение возможности межузлового агрегирования ресурсов более чем по одному eNB/узлу, причем UE может быть сконфигурировано более чем с одной группой несущих. В частности, именно сконфигурированная PCell в расчете на каждую группу несущих может не деактивироваться. Другими словами, PCell в расчете на каждую группу несущих может поддерживать свое состояние как активное все время, как только она сконфигурирована для UE. В этом случае, индекс i обслуживающей соты, соответствующий PCell в группе несущих, который не включает в себя индекс 0 обслуживающей соты, которая представляет собой ведущую PCell, не может использоваться для активации/деактивации.
[63] Более конкретно, если индекс 0, 1, 2 обслуживающей соты сконфигурирован посредством одной группы несущих, тогда как индекс 3, 4, 5 обслуживающей соты сконфигурирован посредством другой группы несущих в сценариях с двумя группами несущих, при этом индекс 0 обслуживающей соты представляет собой PCell, и индекс 3 обслуживающей соты представляет собой PCell второй группы несущих, то только биты, соответствующие 1 и 2, предположительно являются допустимыми для сообщений активации/деактивации сот первой группы несущих, тогда как биты, соответствующие 4 и 5, предположительно являются допустимыми для активации/деактивации сот второй группы несущих. Чтобы проводить некоторое различие между PCell для первой группы несущих и второй группы несущих, PCell для второй группы несущих может упоминаться в качестве S-PCell в дальнейшем. В данном документе, индекс обслуживающей соты может представлять собой логический индекс, определенный относительно каждого UE, или может представлять собой физический индекс для указания соты конкретной полосы частот. CA-система поддерживает неперекрестную диспетчеризацию несущих из самодиспетчеризации несущих или перекрестную диспетчеризацию несущих.
[64] Фиг. 3 показывает структуру радиокадра, к которому применяется настоящее описание изобретения.
[65] Ссылаясь на фиг. 3, радиокадр включает в себя 10 субкадров, и один субкадр включает в себя два временных кванта. Время, потраченное для передачи одного субкадра, называется "интервалом времени передачи (TTI)". Например, длина одного субкадра может составлять 1 мс, и длина одного временного кванта может составлять 0,5 мс.
[66] Один временной квант включает в себя множество OFDM-символов во временной области и включает в себя множество блоков ресурсов (RB) в частотной области. OFDM-символ служит для представления одного периода символа, поскольку OFDMA нисходящей линии связи используется в 3GPP LTE-системе, и он может называться "SC-FDMA-символом" или "периодом символа" в зависимости от схемы со множественным доступом. RB является единицей выделения ресурсов, и он включает в себя множество смежных поднесущих в одном временном кванте. Число OFDM-символов, включенных в один временной квант, может варьироваться согласно конфигурации CP (циклического префикса). CP включает в себя расширенный CP и обычный CP. Например, в случае обычного CP, OFDM-символ состоит из 7. Если сконфигурирован посредством расширенного CP, он включает в себя 6 OFDM-символов в одном временном кванте. Если состояние канала является нестабильным, к примеру, перемещение UE в быстром темпе, расширенный CP может быть выполнен с возможностью уменьшать межсимвольные помехи. В данном документе, структура радиокадра является только иллюстративной, и число субкадров, включенных в радиокадр, или число временных квантов, включенных в субкадр, и число OFDM-символов, включенных во временной квант, может изменяться различными способами, чтобы применять новую систему связи. Это описание изобретения не имеет ограничения на адаптацию к другой системе посредством варьирования характерного признака, и вариант осуществления описания изобретения может применяться изменяемыми способами к соответствующей системе.
[67] Временной квант нисходящей линии связи включает в себя множество OFDM-символов во временной области. Например, один временной квант нисходящей линии связи проиллюстрирован как включающий в себя 7 OFDMA-символов, и один блок ресурсов (RB) проиллюстрирован как включающий в себя 12 поднесущих в частотной области, но на это отсутствуют ограничения. Каждый элемент на сетке ресурсов называется "элементом ресурсов (RE)". Один блок ресурсов включает в себя 12×7 (или 6) RE. Число NDL блоков ресурсов, включенных во временной квант нисходящей линии связи, зависит от полосы пропускания передачи по нисходящей линии связи, которая задается в соте. Полосы пропускания, которые учитываются в LTE, составляют 1,4 МГц, 3 МГц, 5 МГц, 10 МГц, 15 МГц и 20 МГц. Если полосы пропускания представлены посредством числа блоков ресурсов, они составляют 6, 15, 25, 50, 75 и 100, соответственно.
[68] Первые 0 или 1, или 2, или 3 OFDM-символа первого временного кванта в субкадре соответствуют области управления, которой должен назначаться канал управления, а его оставшиеся OFDM-символы становятся областью данных, которой выделяется физический совместно используемый канал нисходящей линии связи (PDSCH). Примеры каналов управления нисходящей линии связи включают в себя физический канал индикатора формата канала управления (PCFICH), физический канал управления нисходящей линии связи (PDCCH) и физический канал индикатора гибридного ARQ (PHICH).
[69] PCFICH, передаваемый в первом OFDM-символе субкадра, переносит индикатор формата канала управления (CFI) относительно числа OFDM-символов (т.е. размера области управления), используемых для передачи каналов управления в субкадре, т.е. переносит информацию относительно числа OFDM-символов, используемых для передачи каналов управления в субкадре. UE сначала принимает CFI по PCFICH и после этого отслеживает PDCCH.
[70] PHICH переносит сигналы подтверждения приема (ACK)/отрицания приема (NACK) в ответ на гибридный автоматический запрос на повторную передачу (HARQ) восходящей линии связи. Иными словами, ACK/NACK-сигналы для данных восходящей линии связи, которые переданы посредством UE, передаются по PHICH.
[71] PDCCH (или ePDCCH) представляет собой физический канал нисходящей линии связи, PDCCH может переносить информацию относительно выделения ресурсов и формата передачи совместно используемого канала нисходящей линии связи (DL-SCH), информацию относительно выделения ресурсов совместно используемого канала восходящей линии связи (UL-SCH), информацию поисковых вызовов относительно канала поисковых вызовов (PCH), системную информацию по DL-SCH, информацию относительно выделения ресурсов управляющего сообщения верхнего уровня, такую как ответ по произвольному доступу, передаваемый по PDSCH, набор команд управления мощностью передачи для UE в определенной группе UE, активация протокола "речь-по-IP" (VoIP) и т.д. Множество PDCCH может передаваться в области управления, и UE может отслеживать множество PDCCH. PDCCH передается в одном элементе канала управления (CCE) или в агрегировании некоторых смежных CCE. CCE является логической единицей назначения для предоставления скорости кодирования согласно состоянию радиоканала в PDCCH. CCE соответствует множеству групп элементов ресурсов (REG). Формат PDCCH и число битов доступного PDCCH определяются согласно корреляции между числом CCE и скоростью кодирования, предоставленной посредством CCE.
[72] Система беспроводной связи настоящего описания изобретения использует декодирование вслепую для обнаружения физического канала управления нисходящей линии связи (PDCCH). Декодирование вслепую представляет собой схему, в которой требуемый идентификатор демаскируется от CRC PDCCH, чтобы определять то, представляет PDCCH или нет собой собственный канал, посредством выполнения CRC-контроля ошибок. ENB определяет PDCCH-формат согласно управляющей информации нисходящей линии связи (DCI), которая должна передаваться в UE. После этого, eNB присоединяет контроль циклическим избыточным кодом (CRC) к DCI и маскирует уникальный идентификатор (называемый "временным идентификатором радиосети (RNTI)") в CRC согласно владельцу или использованию PDCCH. Например, если PDCCH предназначен для конкретного UE, уникальный идентификатор (например, RNTI соты (C-RNTI)) UE может маскироваться в CRC. Альтернативно, если PDCCH предназначен для сообщения поискового вызова, идентификатор индикатора поискового вызова (например, RNTI для поисковых вызовов (P-RNTI)) может маскироваться в CRC. Если PDCCH служит для системной информации (более конкретно, блока системной информации (SIB), который описывается ниже), идентификатор системной информации и RNTI системной информации (например, SI-RNTI) могут маскироваться в CRC. Чтобы указывать ответ по произвольному доступу, который представляет собой ответ на передачу преамбулы произвольного доступа UE, RNTI для произвольного доступа (например, RA-RNTI) может маскироваться в CRC.
[73] Таким образом, BS определяет PDCCH-формат согласно управляющей информации нисходящей линии связи (DCI), которая должна передаваться в UE, и присоединяет контроль циклическим избыточным кодом (CRC) к управляющей информации. DCI включает в себя информацию диспетчеризации в восходящей линии связи или нисходящей линии связи или включает в себя команду управления мощностью передачи (TX) по восходящей линии связи для произвольных групп UE. DCI по-разному использован в зависимости от своего формата, и он также имеет различное поле, которое задается в DCI.
[74] Между тем, субкадр восходящей линии связи может разделяться на область управления, которой выделяется физический канал управления восходящей линии связи (PUCCH), который переносит управляющую информацию восходящей линии связи; управляющая информация включает в себя ACK/NACK-ответ передачи по нисходящей линии связи. Область данных, которой выделяется физический совместно используемый канал восходящей линии связи (PUSCH), который переносит пользовательские данные, в частотной области.
[75] В дальнейшем в этом документе, технические признаки относятся к сигналам синхронизации, используемым в системе беспроводной связи, к которой применяется настоящее описание изобретения.
[76] Фиг. 4 показывает пример сигнала синхронизации, который используется в базовом CP и расширенном CP.
[77] Сигнал синхронизации может разделяться на первичный SS (PSS) и вторичный SS (SSS) в зависимости от своей роли и структуры. Как проиллюстрировано на фиг. 4, когда используются базовый CP и расширенный CP, PSS/SSS включен в предварительно установленный субкадр. В частности, сигналы синхронизации (SS), соответственно, передаются из вторых временных квантов субкадра 0 и субкадра 5 с учетом длины GSM-кадра в 4,6 мс, и граница для радиокадра может обнаруживаться через SSS. PSS передается в последнем OFDM-символе временного кванта, и SSS передается в OFDM-символе непосредственно перед PSS. SS может передавать всего 504 физических идентификаторов сот через комбинацию 3 PSS и 168 SSS. Дополнительно, SS и PBCH передаются в центральных 6 RB в полосе пропускания системы, так что UE может обнаруживаться или декодироваться независимо от полосы пропускания передачи.
[78] Ниже описывается подробная работа, связанная с PSS.
[79] Последовательность Задова-Чу (ZC) длины 63 задается в частотной области и используется в качестве последовательности PSS. ZC-последовательность задается посредством нижеприведенной формулы 1, и элемент последовательности, соответствующий DC-поднесущей, n=31, прореживается. В нижеприведенной формуле 1, Nzc=63.
[80] Математический фиг. 1

[81] 9 оставшихся поднесущих из 6 центральных RB (=72 поднесущие) всегда передаются со значением 0 и упрощают синтез фильтра для синхронизации. Чтобы задавать всего 3 PSS в формуле 1, используются u=25, 29 и 34.
[82] В это время, 29 и 34 имеют отношение сопряженной симметрии, и в силу этого две корреляции могут одновременно выполняться. Здесь, сопряженная симметрия ссылается на отношение формулы 2 (первая формула - когда Nzc является четным числом, и вторая формула - когда Nzc является нечетным числом), и однократный коррелятор для u=29 и 34 может реализовываться посредством использования этой характеристики, и общее количество операций может уменьшаться приблизительно на 33,3%.
[83] Математический фиг. 2
[84] Ниже описывается подробная работа, связанная с SSS.
[85] Фиг. 5 показывает схему формирования кода, связанного с подсинхронным сигналом (SSS).
[86] Последовательность, которая используется для SSS, выполняет перемежаемое присоединение двух m-последовательностей длины 31 и комбинирует две последовательности, с тем чтобы передавать 168 идентификаторов групп сот. M-последовательность в качестве последовательности SSS является сильной в частотно-избирательном окружении, и количество операций может уменьшаться посредством высокоскоростного преобразования m-последовательностей, которое использует быстрое преобразование Адамара. Кроме того, предложено конфигурирование SSS с двумя короткими кодами, чтобы уменьшать количество операций UE.
[87] Фиг. 5 показывает то, что две последовательности в логической области перемежаются в физической области таким образом, что они преобразуются. Когда две m-последовательности, которые используются для формирования SSS-кода, задаются как S1 и S2, если SSS субкадра 0 передает идентификатор группы сот с комбинацией (S1, S2), SSS субкадра 5, переставляемой с (S2, S2) с тем, чтобы передаваться, и в силу этого может различаться 10-секундная граница кадра. В это время, используемый SSS-код использует полином x5+x2+1 и может формировать всего 31 код посредством различных циклических сдвигов.
[88] Чтобы повышать производительность приема, две различных последовательности на основе PSS задаются таким образом, что они скремблируются в SSS и скремблируются в различные последовательности в S1 и S2. После этого, задается код скремблирования на основе S1, и скремблирование выполняется в S2. В это время, кодом SSS обмениваются в единицах по 5 мс, но кодом скремблирования на основе PSS не обмениваются. Код скремблирования на основе PSS задается как версия с 6 циклическими сдвигами согласно PSS-индексу в m-последовательности, которая формируется из полинома x5+x3+1, и код скремблирования на основе S1 задается как версия с 8 циклическими сдвигами согласно индексу S1 в m-последовательности, которая формируется из полинома x5+x4+x2+x1+1.
[89] В дальнейшем в этом документе подробно поясняется принцип многоузловой системы, которая ассоциирована со схемой координированной многоточечной (CoMP) передачи.
[90] Чтобы повышать производительность системы беспроводной связи, технология усовершенствована в направлении повышения плотности узлов, допускающих осуществление доступа в область вокруг пользователя. Система беспроводной связи, имеющая узлы с более высокой плотностью, может предоставлять более высокую производительность через взаимодействие между узлами.
[91] Фиг. 6 показывает пример многоузловой системы.
[92] Ссылаясь на фиг. 6, многоузловая система 20 может состоять из одной BS 21 и множества узлов 25-1, 25-2, 25-3, 25-4 и 25-5. Множество узлов 25-1, 25-2, 25-3, 25-4 и 25-5 могут управляться посредством одной BS 21. Иными словами, множество узлов 25-1, 25-2, 25-3, 25-4 и 25-5 работают так, как если они представляют собой часть одной соты. В этом случае, каждому из узлов 25-1, 25-2, 25-3, 25-4 и 25-5 может выделяться отдельный идентификатор (идентификатор) узла, либо он может работать, как если он представляет собой часть группы антенн без дополнительного идентификатора узла. В этом случае, многоузловая система 20 по фиг. 6 может рассматриваться в качестве распределенной многоузловой системы (DMNS), которая составляет одну соту.
[93] Альтернативно, множество узлов 25-1, 25-2, 25-3, 25-4 и 25-5 могут иметь отдельные идентификаторы сот и выполнять передачу обслуживания (HO) и диспетчеризацию UE. В этом случае, многоузловая система 20 по фиг. 6 может рассматриваться в качестве многосотовой системы. BS 21 может представлять собой макросоту. Каждый узел может представлять собой фемтосоту или пикосоту, имеющую покрытие соты, меньшее покрытия соты для макросоты. В связи с этим, если множество сот сконфигурировано наложенным способом согласно покрытию, оно может называться "многоуровневой сетью".
[94] На фиг. 6, каждый из узлов 25-1, 25-2, 25-3, 25-4 и 25-5 может представлять собой любое из BS, узла B, усовершенствованного узла B, пикосотового eNB (PeNB), собственного eNB (HeNB), удаленной радиоголовки (RRH), ретрансляционной станции (RS) или повторителя и распределенной антенны. По меньшей мере, одна антенна может устанавливаться в одном узле. Помимо этого, узел может называться "точкой". В нижеприведенном описании, узел подразумевает группу антенн, разделенную посредством более чем конкретного интервала в DMNS. Иными словами, в нижеприведенном описании предполагается то, что каждый узел подразумевает RRH физическим способом. Тем не менее, настоящее описание изобретения не ограничено этим, и узел может задаваться как любая группа антенн независимо от физического интервала. Например, настоящее описание изобретения может применяться с учетом того, что узел, состоящий из горизонтально поляризованных антенн, и узел, состоящий из вертикально поляризованных антенн, составляют BS, состоящую из множества кросс-поляризованных антенн. Помимо этого, настоящее описание изобретения может применяться к случаю, в котором каждый узел представляет собой пикосоту или фемтосоту, имеющую меньшее покрытие соты, чем макросота, т.е. к многосотовой системе. В нижеприведенном описании, антенна может быть заменена антенным портом, виртуальной антенной, группой антенн, а также физической антенной.
[95] Координированная многоточечная (CoMP) передача означает схему совместной связи между узлами. В многосотовой распределенной многоузловой системе, межсотовые помехи могут уменьшаться посредством применения CoMP-передачи. В односотовой распределенной многоузловой системе, внутрисотовые межточечные помехи могут уменьшаться посредством применения CoMP-передачи. UE может принимать данные из множества узлов совместно посредством выполнения CoMP-передачи. Дополнительно, каждый узел может одновременно поддерживать, по меньшей мере, одно UE посредством использования идентичного радиочастотного ресурса, чтобы повышать производительность системы. Помимо этого, базовая станция может выполнять схему множественного доступа с пространственным разделением каналов (SDMA) на основе информации состояния канала между базовой станцией и UE.
[96] Основная цель CoMP-передачи состоит в том, чтобы повышать производительность связи UE, расположенных на границе соты или границе узла. В 3GPP LTE, схема CoMP-передачи может классифицироваться на две схемы.
[97] 1) Схема объединенной обработки (JP): JP-схема представляет собой схему передачи данных, которая совместно используется посредством, по меньшей мере, одного узла для UE. JP-схема включает в себя схему объединенной передачи (JT) и схему динамического выбора точки (DPS). JP-схема представляет собой схему, в которой множество узлов одновременно передают данные в одно UE или множество UE в частотно-временных ресурсах. Множество узлов, передающих данные, могут представлять собой все или часть группы, допускающей выполнение CoMP-передачи. Данные могут передаваться когерентно или некогерентно. Соответственно, может повышаться качество принимаемого сигнала и/или пропускная способность. DSP-схема представляет собой схему, в которой один узел в группе, допускающей выполнение CoMP-передачи, передает данные в частотно-временных ресурсах. В DSP-схеме, даже если данные могут передаваться посредством множества узлов одновременно, тем не менее, один узел, выбранный из множества узлов, передает данные. Узел, передающий данные, или узел подавления, который не передает данные, может изменяться в единице субкадра. Дополнительно, RB-пара, используемая в субкадре, также может изменяться. DSP-схема может включать в себя схему динамического выбора соты (DCS).
[98] 2) Схема координированной диспетчеризации (CS)/координированного формирования диаграммы направленности (CB): CS/CB-схема представляет собой схему, в которой только один обслуживающий узел может передавать данные, и оставшиеся узлы координируются с обслуживающим узлом посредством диспетчеризации или посредством уменьшения помех луча передачи, вследствие такой проблемы, как ограниченная пропускная способность транзитного соединения. CS/CB-схема включает в себя схему полустатического выбора точки (SSPS). SSPS-схема представляет собой схему, в которой один узел передает данные в конкретное UE в конкретное время. Передача данных узла может изменяться посредством полустатической схемы.
[99] В дальнейшем в этом документе, описывается принцип квазисовместного размещения (QCL).
[100] В CoMP-ситуации, в которой одно UE принимает канал нисходящей линии связи из множества точек передачи, UE может принимать конкретный усовершенствованный PDCCH (EPDCCH) или PDSCH, диспетчеризуемый посредством EPDCCH, из конкретной точки передачи через конкретные временные ресурсы и/или конкретные частотные ресурсы, либо принимать EPDCCH или PDSCH, диспетчеризуемый посредством EPDCCH, из другой точки передачи через другие временные ресурсы и/или другие частотные ресурсы. В это время, если UE может определять то, из какой точки передачи передается канал, производительность приема канала может повышаться с использованием нескольких атрибутов, наблюдаемых из точки передачи, например, крупномасштабных свойств, таких как доплеровский разброс, доплеровский сдвиг, средняя задержка, разброс задержки или среднее усиление.
[101] ENB может передавать в служебных сигналах точку передачи, из которой передается конкретный EPDCCH или PDSCH, диспетчеризуемый посредством конкретного EPDCCH. В качестве примера, eNB может уведомлять UE в отношении того, что конкретный EPDCCH или PDSCH, диспетчеризуемый посредством конкретного EPDCCH, является квазисовместно размещенным (QCL) с конкретным опорным сигналом, таким как CRS или CSI-RS, согласованно передаваемым посредством конкретной точки передачи. Здесь, QCL может означать то, что канал имеет атрибуты канала, идентичные атрибутам конкретного опорного сигнала в долгосрочной перспективе. Если информация относительно QCL не предоставляется, UE может предполагать, что все каналы передаются из обслуживающей соты и являются QCL-размещенными с CRS обслуживающей соты.
[102] Соответственно, преобразование ресурсов конкретного EPDCCH или PDSCH, диспетчеризуемого посредством конкретного EPDCCH, и передача других каналов управления, таких как PCFICH, PHICH и PDCCH, являются избирательно применимыми в зависимости от того, с каким RS является QCL-размещенным канал.
[103] В дальнейшем в этом документе описываются подробные признаки, связанные с опорными сигналами (RS).
[104] В общем, опорный сигнал передается в качестве последовательности. Любая последовательность может использоваться в качестве последовательности, используемой для RS-последовательности без конкретных ограничений. RS-последовательность может представлять собой машиногенерируемую последовательность на основе фазовой манипуляции (PSK). Примеры PSK включают в себя двухпозиционную фазовую манипуляцию (BPSK), квадратурную фазовую манипуляцию (QPSK) и т.д. Альтернативно, RS-последовательность может представлять собой последовательность с постоянной амплитудой и нулевой автокорреляцией (CAZAC). Примеры CAZAC-последовательности включают в себя последовательность Задова-Чу (ZC), ZC-последовательность с циклическим расширением, ZC-последовательность с усечением и т.д. Альтернативно, RS-последовательность может представлять собой псевдослучайную (PN) последовательность. Примеры PN-последовательности включают в себя m-последовательность, машиногенерируемую последовательность, последовательность Голда, последовательность Касами и т.д. Помимо этого, RS-последовательность может представлять собой последовательность с циклическим сдвигом.
[105] RS нисходящей линии связи может классифицироваться на конкретный для соты опорный сигнал (CRS), опорный сигнал одночастотной сети для услуги широковещательной и многоадресной передачи мультимедиа (MBSFN), конкретный для UE опорный сигнал, опорный сигнал позиционирования (PRS) и опорный сигнал информации состояния канала (CSI-RS). CRS представляет собой RS, передаваемый во все UE в соте, и используется в измерении канала для обратной связи с индикатором качества канала (CQI) и оценке канала для PDSCH. Опорный MBSFN-сигнал может передаваться в субкадре, выделяемом для MBSFN-передачи. Конкретный для UE RS представляет собой RS, принимаемый посредством конкретного UE или конкретной группы UE в соте, и также может называться "опорным сигналом демодуляции (DMRS)". DMRS главным образом используется для демодуляции данных конкретного UE или конкретной группы UE. PRS может использоваться для оценки местоположения UE. CSI-RS используется для оценки канала для PDSCH LTE-A UE. CSI-RS относительно разреженно развертывается в частотной области или временной области и может быть прорежен в области данных нормального субкадра или MBSFN-субкадра. При необходимости, индикатор качества канала (CQI), индикатор матрицы предварительного кодирования (PMI), индикатор ранга (RI) и т.д., может сообщаться из UE через CSI-оценку.
[106] CRS передается изо всех субкадров нисходящей линии связи в соте, поддерживающей PDSCH-передачу. CRS может передаваться через антенные порты 0-3 и может задаваться только для Δf=15 кГц. CRS может упоминаться в разделе 6.10.1 документа Партнерского проекта третьего поколения (3GPP) TS 36.211 V10.1.0 (2011-03) "Technical Specification Group Radio Access Network: Evolved Universal Terrestrial Radio Access (E-UTRA): Physical channels and modulation (Release 8)".
[107] Фиг. 7 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует один антенный порт. Фиг. 8 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует два антенных порта. Фиг. 9 показывает один пример шаблона, в котором CRS преобразуется в RB, когда базовая станция использует четыре антенных порта. CRS-шаблоны могут использоваться для того, чтобы поддерживать функции LTE-A. Например, CRS-шаблоны могут использоваться для того, чтобы поддерживать технологию координированной многоточечной (CoMP) передачи/приема, пространственное мультиплексирование и т.д. Кроме того, CRS может использоваться для измерения качества канала, CP-обнаружения, частотно-временной синхронизации и т.д.
[108] Ссылаясь на фиг. 7-9, в случае если базовая станция выполняет многоантенную передачу с использованием множества антенных портов, одна сетка ресурсов выделяется каждому антенному порту. "R0" представляет опорный сигнал для первого антенного порта. "R1" представляет опорный сигнал для второго антенного порта. "R2" представляет опорный сигнал для третьего антенного порта. "R3" представляет опорный сигнал для четвертого антенного порта. Позиции R0-R3 в субкадре не перекрываются между собой; ℓ, представляющее позицию OFDM-символа во временном кванте, может принимать значение в пределах от 0-6 в обычном CP. В одном OFDM-символе, опорный сигнал для каждого антенного порта разнесен посредством интервала в шесть поднесущих. Число R0 и число R1 в субкадре являются идентичными между собой, в то время как число R2 и число R3 являются идентичными между собой. Число R2 или R3 в субкадре меньше числа R0 или R1. Элемент ресурсов, используемый для опорного сигнала одного антенного порта, не используется для опорного сигнала другого антенного порта. Это предназначено для того, чтобы не допускать формирования помех между антенными портами.
[109] CRS всегда передаются столько раз, сколько составляет число антенных портов независимо от числа потоков. CRS имеет отдельный опорный сигнал для каждого антенного порта. Позиция в частотной области и позиция во временной области CRS в субкадре определяются независимо от UE. CRS-последовательность, умноженная в CRS, также формируется независимо от UE. Следовательно, все UE в соте могут принимать CRS. Тем не менее, следует отметить, что CRS-позиция в субкадре и CRS-последовательности может определяться согласно идентификаторам сот. Позиция во временной области CRS в субкадре может определяться согласно номеру антенного порта и числу OFDM-символов в блоке ресурсов. Позиция в частотной области CRS в субкадре может определяться согласно номеру антенного порта, идентификатору соты, индексу OFDM-символа (ℓ), номеру временного кванта в радиокадре и т.д.
[110] Двумерная CRS-последовательность может формироваться посредством умножения между символами двумерной ортогональной последовательности и символами двумерной псевдослучайной последовательности. Может быть предусмотрено три различных двумерных ортогональных последовательности и 170 различных двумерных псевдослучайных последовательностей. Каждый идентификатор соты соответствует уникальной комбинации одной ортогональной последовательности и одной псевдослучайной последовательности. Помимо этого, перескок частот может применяться к CRS. Период конфигурации перескока частот может составлять один радиокадр (10 мс), и каждая конфигурация перескока частот соответствует одной группе идентификаторов сот.
[111] CSI-RS передается через один, два, четыре или восемь антенных портов. Антенные порты, используемые для каждого случая, составляют p=15, p=15, 16, p=15..., 18 и p=15..., 22, соответственно. CSI-RS может задаваться только Δf=15 кГц. CSI-RS может ссылаться на раздел 6.10.5 документа Партнерского проекта третьего поколения (3GPP) TS 36.211 V10.1.0 (2011-03) "Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA): Physical channels and modulation (Release 8)".
[112] CSI-RS-последовательности могут быть основаны на псевдослучайной последовательности, которая формируется из начального числа на основе идентификатора соты. Относительно передачи CSI-RS, максимум 32 конфигурации, отличающихся друг от друга, могут учитываться для того, чтобы уменьшать межсотовые помехи (ICI) в многосотовом окружении, включающем в себя гетерогенное сетевое (HetNet) окружение. CSI-RS-конфигурация варьируется согласно числу антенных портов в соте и CP, и соседние соты могут иметь наиболее отличающиеся конфигурации. Кроме того, CSI-RS-конфигурация может разделяться на два типа в зависимости от структуры кадра. Два типа включают в себя тип, применяемый как к FDD-кадру, так и к TDD-кадру, и тип, применяемый только к TDD-кадру. Множество CSI-RS-конфигураций может использоваться для одной соты. Для тех UE, допускающих CSI-RS с ненулевой мощностью, может использоваться 0 или 1 CSI-конфигурация. Для тех UE, допускающих CSI-RS с нулевой мощностью, могут использоваться 0 или более CSI-конфигураций.
[113] Конфигурация CSI-RS может указываться посредством верхнего уровня, к примеру, передачи служебных сигналов уровня управления радиоресурсами (RRC). Подробно, информационный элемент (IE) CSI-RS-Config, передаваемый через верхний уровень, может указывать CSI-RS-конфигурацию.
[114] Передача служебных сигналов верхнего уровня дополнительно может задавать период, и смещение субкадра, в котором передается CSI-RS, может определяться согласно конфигурации CSI-RS-субкадра.
[115] Фиг. 10 показывает пример RB, в который преобразуется CSI-RS. Подробно, фиг. 10 показывает элементы ресурсов, используемые для CSI-RS в структуре обычного CP, когда индекс CSI-RS-конфигурации является нулем. Rp обозначает элементы ресурсов, используемые для CSI-RS-передачи на антенном порту p. Ссылаясь на фиг. 10, CSI-RS для антенного порта 15 и 16 передается через элементы ресурсов, соответствующие третьей поднесущей (индекс 2 поднесущей) шестого и седьмого OFDM-символа (индекс 5, 6 OFDM-символа) первого временного кванта. CSI-RS для антенного порта 17 и 18 передается через элементы ресурсов, соответствующие девятой поднесущей (индекс 8 поднесущей) шестого и седьмого OFDM-символа (индекс 5, 6 OFDM-символа) первого временного кванта. CSI-RS для антенного порта 19 и 20 передается через элементы ресурсов, идентичные элементам ресурсов, по которым передается CSI-RS для антенного порта 15 и 16. CSI-RS для антенного порта 21 и 22 передается через элементы ресурсов, идентичные элементам ресурсов, по которым передается CSI-RS для антенного порта 17 и 18.
[116]
[117] В дальнейшем в этом документе, вводятся подробные признаки, связанные с обнаружением опорного сигнала (DRS), который ассоциирован с вышеописанными небольшими сотами. А именно, следующие части описания изобретения предлагают различные признаки, связанные с DRS, который также упоминается как сигнал обнаружения или улучшенный сигнал обнаружения. Например, настоящее описание изобретения предлагает подробные варианты осуществления, связанные с возможными вариантами, которые могут использоваться в качестве DRS. Дополнительно, настоящее описание изобретения предлагает вариант осуществления относительно совмещения между интервалом отсутствия сигнала для измерений и DRS, вариант осуществления, связанный с конфигурацией, связанной с синхронизацией измерений DRS, вариант осуществления относительно неправильного совмещения между числом сот, вариант осуществления относительно улучшенного уменьшения помех и адаптации трафика (eIMTA), которое динамически изменяет конфигурацию дуплекса с временным разделением каналов (TDD) в контексте DRS-операций.
[118] Здесь, подробно предлагается определенное число требуемых характеристик DRS (или взаимозаменяемо "улучшенный сигнал обнаружения") и определенное число возможных вариантов для DRS.
[119]
[120] В плотном сценарии небольших сот, вероятно, что UE соединено с наложенным макроузлом, и небольшая сота может использоваться для разгрузки данных. В таком случае, для UE желательно обнаруживать много сот в пределах дальности связи, и затем наложенный макроуровень выбирает наилучшую соту с учетом информации "нагрузки", а также другой информации. Другими словами, наилучшая сота для разгрузки данных может не быть наилучшей сотой на основе RSRP/RSRQ. Наоборот, сота с низкой нагрузкой или множеством пользователей может быть желательной с точки зрения общего управления сотой. Таким образом, может рассматриваться улучшенная процедура обнаружения, чтобы обеспечивать возможность обнаружения большего числа сот по сравнению с традиционным механизмом.
[121] С точки зрения требуемых характеристик DRS может включать в себя следующее:
[122] * обнаружение большего числа сот, чем унаследованное обнаружение сот на основе PSS/SSS/CRS;
[123] * обнаружение сот за короткое время, к примеру, в субкадре;
[124] * выполнение измерения за короткое время, к примеру, в субкадре; и
[125] * поддержка необходимого измерения для операции быстрого включения/выключения временной шкалы.
[126] Дополнительно, возможные варианты, которые могут рассматриваться для улучшенного алгоритма обнаружения, могут включать в себя следующее:
[127] * PSS/(SSS)+CRS;
[128] * PSS/(SSS)+CSI-RS;
[129] * PSS/(SSS)+PRS;
[130] * PSS+SSS+CRS+(CSI-RS);
[131] * Комбинация одного или более вариантов (1)-(3); и
[132] * PSS+SSS+CRS+(CSI-RS): в этом случае, UE может предполагать, что CSI-RS присутствует только в случае конфигурирования с помощью CSI-RS-конфигурации, такой как идентификатор скремблирования, конфигурации ресурсов для CSI-RS и т.д. Другими словами, UE может выполнять идентификацию точек передачи (TP), только если помощь сети, связанная с CSI-RS, сконфигурирована или явно сконфигурирована при наличии CSI-RS-ресурса.
[133] Хотя возможные варианты для DRS не ограничены определенным примером, предпочтительно, чтобы DRS содержал PSS, SSS и CRS. Дополнительно, DRS дополнительно может содержать CSI-RS в зависимости от CSI-RS-конфигурации (например, интервала, смещения CSI-RS).
[134]
[135] Предполагается, что сигнал обнаружения (т.е. DRS) должен использоваться для приблизительного частотно-временного отслеживания, измерения и квазисовместного размещения (если требуется). При рассмотрении некоторых целей, синтез сигнала обнаружения должен удовлетворять следующим требованиям:
[136] (1) Сигнал обнаружения должен поддерживать приблизительную временную синхронизацию с допущением об очень высокой начальной ошибке синхронизации (к примеру,+/-2,5 мс);
[137] (2) Сигнал обнаружения должен поддерживать приблизительную частотную синхронизацию с допущением об очень высокой начальной ошибке по частоте (к примеру, 20 кГц);
[138] (3) Сигнал обнаружения должен поддерживать обнаруживаемость, по меньшей мере, трех сот (или точек передачи); и
[139] (4) Сигнал обнаружения должен поддерживать достаточную точность измерения.
[140] Чтобы поддерживать элементы (1) и/или (2), можно предполагать, что PSS и/или SSS могут передаваться.
[141]
[142] С точки зрения синтеза сигналов обнаружения, следует ответить на следующие вопросы:
[143] (1) На идентичной частоте, соты, передающие улучшенный сигнал обнаружения и соты, не передающие улучшенные сигналы обнаружения, могут сосуществовать или нет?
[144] (2) Если сота передает улучшенные сигналы обнаружения, то она передает сигналы обнаружения в деактивированном состоянии, а также в активированном состоянии?
[145] (3) С точки зрения формирования сообщений с измерениями UE, UE сообщает оба отчета об измерениях на основе унаследованных и улучшенных сигналов обнаружения при наличии либо сообщает только один? Когда оно сообщает только один, каковы критерии для того, чтобы выбирать один отчет?
[146] (4) Может UE или нет выполнять измерение на основе улучшенного сигнала обнаружения даже в DRX-режиме? (A) Если это поддерживается, может требоваться, что UE должно активироваться даже в DRX-цикле (не в OnDuration), чтобы выполнять измерение после синхронизации/конфигурации DRS-передачи. Например, если DRS передается каждые 160 мс, то UE должно активироваться каждые 160 мс, чтобы выполнять измерение?
[147] (5) Как должно выполняться мультиплексирование между сигналами обнаружения из различных сот? Через TDM или FDM, или CDM?
[148] (6) Какая-либо активная передача данных в субкадре, в котором передается сигнал обнаружения? Без активной передачи данных, как измерять RSSI?
[149] (7) Имеется необходимость увеличивать число идентификаторов сот с 504 до?
[150] (8) Что, если SFN не совмещается между сотами, передающими сигналы обнаружения вместе для эффективной производительности UE?
[151] (9) Что, если длина CP не совмещается между сотами, передающими сигналы обнаружения вместе для эффективной производительности UE?
[152] (10) Что, если сигнал обнаружения диспетчеризован в MBSFN SF?
[153] (11) Период передачи сигналов обнаружения и конфигурация ресурсов должны быть конфигурируемыми? и
[154] (12) Как передавать сигнал обнаружения в TDD?
[155]
[156] Для возможной конфигурации, периодичность улучшенных сигналов обнаружения (т.е. DRS) может рассматриваться со следующими ограничениями:
[157] (1) Кратное число периода отсутствия сигнала для измерений: например, 40 мс, 80 мс или 160 мс, или 320 мс (если новый период отсутствия сигнала для измерений сконфигурирован, также может рассматриваться кратное число этих новых периодов);
[158] (2) Совмещение с DRX-циклом: 10, 20, 32, 40, 64, 80, 128, 160, 256, 320, 512, 640, 1024, 1280, 2048, 2560 (это ограничение может исключаться, если UE может измерять с использованием унаследованных сигналов для обслуживающей соты); и
[159] (3) Если PSS/SSS передается в сигнале обнаружения, периодичность сигнала обнаружения может быть кратным числом 5 мс, так что PSS/SSS, передаваемый для улучшенного сигнала обнаружения, может быть заменен посредством PSS/SSS, передаваемого в активированном состоянии. Если сигнал обнаружения не передается в активированном состоянии, это ограничение может исключаться. Альтернативно, чтобы не допускать влияния на унаследованное UE, также может рассматриваться другая периодичность, не совмещенная с PSS/SSS, так что PSS/SSS может передаваться в течение активированного состояния, в то время как дополнительный PSS/SSS также может передаваться для передачи сигналов обнаружения. Если DRS-PSS и DRS-SSS дополнительно передаются отдельно от PSS/SSS, передаваемого в активированном состоянии, идентификатор соты между DRS-PSS/DRS-SSS может отличаться от PSS/SSS. Кроме того, может не предполагаться QCL-взаимосвязь между DRS-PSS/DRS-SSS и PSS/SSS. В этом случае, может быть сконфигурирована QCL-взаимосвязь DRS-CSI-RS (или DRS-CRS) и PSS/SSS и/или CRS, причем DRS-CSI-RS может использоваться для PSS/SSS- и/или CRS-декодирования/отслеживания. В этом случае, идентификатор соты, используемый для DRS-CSI-RS и PSS/SSS и/или CRS, предположительно может быть одинаковым. Если идентификатор соты, используемый для DRS-PSS/DRS-SSS, является идентичным идентификатору соты для PSS/SSS, DRS-PSS/DRS-SSS может быть заменен посредством SSS/SSS, если DRS-PSSS/DRS-SSS конфликтует с PSS/SSS, если они конфликтуют. В противном случае, PSS/SSS может быть отброшен, когда они конфликтуют.
[160] Как пояснено выше, предпочтительно периодичность DRS задается как кратное число периода отсутствия сигнала для измерений. В этом подробном описании, "кратное число" также включает в себя идентичное значение. Соответственно, если период отсутствия сигнала для измерений задается равным 40 мс, и сконфигурирован один идентичный период отсутствия сигнала для измерений, предпочтительно, чтобы периодичность DRS задавалась равной одному из 40 мс, 80 мс, 160 мс. На основе настоящего описания изобретения, UE могут измерять DRS в пределах интервала отсутствия сигнала для измерений, и в силу этого период DRS может совмещаться с интервалом отсутствия сигнала для измерений, если периодичность DRS задается как кратное число периода отсутствия сигнала для измерений.
[161]
[162] Кроме того, с точки зрения осуществимого субкадра, в котором может передаваться сигнал обнаружения, для TDD и FDD, MBSFN-субкадры должны удаляться из списка возможных вариантов. Таким образом, сигнал обнаружения не может передаваться в MBSFN-субкадре на основе другого возможного аспекта настоящего описания изобретения.
[163]
[164] В дальнейшем в этом документе подробно поясняются признаки, связанные с интервалами отсутствия сигнала для измерений и требованиями по измерениям для UE с DRS.
[165] Стимул обеспечения совмещения сигнала обнаружения с периодом отсутствия сигнала для измерений заключается в том, чтобы разрешать "идентичный интервал отсутствия сигнала для измерений", применимый для межчастотного измерения независимо от того, основано измерение на унаследованном сигнале или новом сигнале обнаружения. В противном случае, UE, возможно, должно быть сконфигурировано с двумя различными шаблонами интервалов отсутствия сигнала для измерений, что может быть нежелательным вследствие прерывания обслуживания и влияния на производительность. Когда один или более дополнительных интервалов отсутствия сигнала для измерений сконфигурированы для UE, некоторые ограничения могут рассматриваться, чтобы ограничивать идентичное количество времени прерывания UE или не увеличивать время прерывания обслуживания UE относительно текущего требования. Это может выполняться, в общем, посредством увеличения интервала измерений или сокращения интервала отсутствия сигнала для измерений. Это должно рассматриваться с позиций двух аспектов. Один - из конфигурирования интервалов отсутствия сигнала для измерений для сигналов обнаружения, а другой - из конфигурирования интервала отсутствия сигнала для измерений для унаследованных сигналов обнаружения. Согласно текущему требованию RAN4, UE должно обнаруживать новую FDD-соту в следующей формуле:
[166] Математический фиг. 3
 ,
,
[167] где:
[168] T_Basic_Identify_Inter=480 мс. Он является периодом времени, используемым в межчастотном уравнении, в котором задается максимальное разрешенное время для идентификации новой межчастотной FDD-соты посредством UE.
[169] N_freq задается в разделе 8.1.2.1.1, и T_inter1 задается в разделе 8.1.2.1 в 3GPP TS 36.133 V10.1.0 (2010-12).
[170] Следующая таблица задается в документах 3GPP-стандарта.
[171] Табл. 1
[172] Например, с интервалом отсутствия сигнала для измерений 40 мс, UE должно находить новую частоту с 480*480/60*7=480*8*7. Другими словами, 8 измерений используются для межчастотного измерения для частоты, если выполняется поиск в 7 частотах. Когда сигнал обнаружения (т.е. DRS) вводится, UE предположительно может выполнять обнаружение сот посредством считывания одного или нескольких сигналов обнаружения. В этом случае, требование для UE с сигналом обнаружения должно представлять собой 480 * (480 * Число DRS-пакетов, требуемых для обнаружения/DRS-интервал) * N_freq, где "*N_freq" может представлять собой номер частотного уровня либо только с DRS, либо как с DRS, так и с CRS.
[173] А именно, при определении требований в UE, ассоциированных со временем задержки измерений для DRS, может использоваться интервал DRS (т.е. периодичность DRS).
[174]
[175] В другом аспекте настоящего описания изобретения, интервал отсутствия сигнала для измерений может задаваться следующими способами.
[176] Когда вводится сигнал обнаружения, в котором интервал отсутствия сигнала для измерений не совмещается с унаследованным UE, чтобы удовлетворять времени прерывания обслуживания в неизменном состоянии, требование по обнаружению сот с использованием унаследованных сигналов должно быть индивидуально адаптировано.
[177] Один подход заключается в том, чтобы использовать "минимальное доступное время" для межчастотной технологии для обнаружения сот на основе CRS, или другая RAT может уменьшаться (при этом интервал или шаблон измерений также может изменяться).
[178] Например, следующая таблица может быть предложена в настоящем описании изобретения.
[179] Табл. 2
[180] Например, вместо конфигурирования только шаблона 0 или 1 интервалов отсутствия сигнала, могут рассматриваться новые шаблоны интервалов отсутствия сигнала, как показано выше, причем минимальное доступное время, используемое для процедур, отличных от измерения на основе DRS, может быть ограничено, что обеспечивает возможность использования оставшегося времени для сигналов обнаружения. Например, в течение 480 мс, межчастотное измерение с использованием сигналов обнаружения должно требовать 6 * 2 (интервал отсутствия сигнала для измерений в 6 мс с 2 DRS-обнаружениями) для частоты необходимо, и UE должно отслеживать 3 частоты с DRS, причем полное время, используемое для DRS, равно 12*3=36 мс. Таким образом, доступное время для измерения на основе унаследованных сигналов должно уменьшаться (к примеру, 2 или 3) посредством уменьшения строгости либо периода отсутствия сигнала для измерений, либо интервала отсутствия сигнала для измерений.
[181] Когда DRX сконфигурирован, аналогичное требование является применимым.
[182]
[183] Другой вариант для того, чтобы определять требование с DRS, заключается в том, чтобы использовать требование по OTDOA, как показано ниже. Другими словами, TPRS может изменяться на TDRS с интервалом DRS-передачи, и M может быть числом выборок для считывания.
[184] Все требования по межчастотным RSTD-измерениям, указываемые в разделах 8.1.2.6.1-8.1.2.6.4 (3GPP TS 36.133), должны применяться, когда используется идентификатор шаблона интервалов отсутствия сигнала для измерений №0, указываемый в разделе 8.1.2.1 (3GPP TS 36.133).
[185] Все требования по межчастотным RSTD-измерениям, указываемые в разделах 8.1.2.6.1-8.1.2.6.4 (3GPP TS 36.133), должны применяться без DRX, а также для всех DRX-циклов, указываемых в 3GPP TS 36.331. Более подробные признаки, связанные с вышеуказанной операцией, могут ссылаться на раздел 8.1.2.6.1 из 3GPP TS 36.133 V10.1.0 (2010-12).
[186]
[187] Чтобы совмещать передачи сигналов обнаружения из сот по частоте, аналогично PRS, может предполагаться следующее. Подробно, следующее поле "DRS" дополнительно может задаваться на основе следующего языка.
[188]
[189] DRS
[190] Это поле указывает DRS-конфигурацию соседней соты.
[191] Когда EARFCN соседней соты является идентичным EARFCN для опорной соты вспомогательных данных (или другой соседней соты), целевое устройство может предполагать, что каждый DRS-период в соседней соте, по меньшей мере, частично перекрывается с DRS-периодом в опорной соте вспомогательных данных, причем максимальное смещение между передаваемыми DRS-периодами предположительно может не превышать половину субкадра. Альтернативно, целевое устройство может предполагать, что каждый DRS-период в соседней соте не перекрывается с DRS-периодом, когда DRS-период задается равным 1 мс.
[192] Дополнительно или альтернативно, целевое устройство может предполагать, что DRS передается в течение DMTC-длительности, максимум которой задается равным 6 мс, как сконфигурировано посредством сети через передачу служебных сигналов верхнего уровня. Соответственно, UE может предполагать, что DRS передается в окне в 6 мс, и дополнительно предполагать, что максимум смещения DRS составляет 5 мс.
[193]
[194] Когда улучшенный абсолютный номер радиочастотного канала (EARFCN) соседней соты является идентичным EARFCN для обслуживающей соты (или другой соты), цель может предполагать, что эта сота имеет PRS-периодичность (Tprs), идентичную PRS-периодичности опорной соты вспомогательных данных.
[195] Другими словами, UE может предполагать, что DRS-передачи из нескольких сот по частоте совмещаются с точки зрения периода и смещения.
[196] Более конкретно, инициирование измерения на основе сигналов обнаружения для межчастотной технологии может быть сконфигурировано только с шаблоном интервалов отсутствия сигнала для измерений №0, причем сеть может совмещать передачу сигналов обнаружения, которые должны совмещаться с шаблоном интервалов отсутствия сигнала измерения UE.
[197]
[198] Если UE сконфигурировано как с OTDOA, так и с DRS, непросто совмещать все измерения посредством одного шаблона интервалов отсутствия сигнала для измерений. Таким образом, в общем, стоит рассматривать конфигурирование одного или более шаблонов интервалов отсутствия сигнала для измерений для UE, по которому должна иметь сведения обслуживающая сота. Тем не менее, в этом случае, чтобы не увеличивать объем служебной информации в UE, может требоваться уменьшение строгости унаследованного измерения, включающего в себя OTDOA (посредством расширения периода измерений). Альтернативно, аналогично OTDOA, UE должно быть сконфигурировано только с одним интервалом отсутствия сигнала для измерений, который используется для обоих DRS- и CRS-(а также OTDOA-) измерений при необходимости. Тем не менее, это может ограничивать варианты использования развертывания для процедуры обнаружения на основе DRS. Таким образом, в общем, предпочитается рассмотрение уменьшения строгости интервала отсутствия сигнала измерения UE наряду с обеспечением нескольких конфигураций измерений, причем предполагается, по меньшей мере, некоторая координация между небольшими сотами в кластере (т.е. вышеописанное допущение, связанное с DRS-периодом, также является применимым здесь). Это может расширяться на идентичную частоту. Для различных частот, UE может быть сконфигурировано с различным смещением начала интервала отсутствия сигнала для измерений, которое обслуживающая сота конфигурирует несколькими различными способами.
[199] Один заключается в том, чтобы изменять шаблон интервалов отсутствия сигнала для измерений таким образом, что он включает в себя несколько значений смещения с большим периодом измерений, или UE может быть сконфигурировано с несколькими интервалами отсутствия сигнала для измерений.
[200]
[201] Дополнительно или альтернативно вышеуказанной операции, UE также может быть сконфигурировано с набором DRS-конфигураций, который включает в себя информацию по периоду, смещению, длительности и потенциально RS-типу. В этом случае, период и длительность могут быть необязательными, тогда как смещение может быть предписанным или необязательным (если поле не присутствует, UE может предполагать то, что SFN и субкадровое смещение совмещаются между целевыми сотами и обслуживающей сотой). Если период не присутствует, UE может предполагать предварительно фиксированное значение, к примеру, 40 мс или 80 мс.
[202] Когда сконфигурирован интервал отсутствия сигнала для измерений (или несколько интервалов отсутствия сигнала для измерений), UE может выполнять только измерение на основе DRS для этих сконфигурированных интервалов отсутствия сигнала для измерений на основе сигналов обнаружения.
[203]
[204] Подробные признаки, связанные с вышеуказанной операцией, поясняются следующим образом.
[205] Фиг. 11 показывает пример измерения UE, выполняемого для DRS согласно одному примеру настоящего описания изобретения. Как проиллюстрировано, UE может быть выполнено с возможностью измерять, по меньшей мере, одну соту, например, небольшие соты, поддерживающие операции включения/выключения питания. На фиг. 11, сота 1 представляет собой активированную соту, которая всегда "активирована", тогда как соты 2-3 выполняют периодические операции активации/деактивации. Как пояснено выше, предпочтительно, чтобы период DRS совмещался с интервалом отсутствия сигнала для измерений, и в силу этого UE может быть выполнено с возможностью измерять DRS в пределах интервала отсутствия сигнала для измерений. Дополнительно, как пояснено выше, длина интервала 1130 отсутствия сигнала для измерений на фиг. 11 может задаваться равной 6 мс, и период повторения интервала отсутствия сигнала для измерений может задаваться равным 40 мс или 80 мс, и в силу этого период измерений DRS 1140 на фиг. 11 может задаваться равным 40 мс, 80 мс или 160 мс. Поскольку возможные варианты DRS могут включать в себя PSS, SSS, CRS и необязательно CSI-RS, UE может быть выполнено с возможностью измерять PSS, SSS, CRS и CSI-RS в течение определенной длительности измерений на основе "DRS-конфигураций", доставляемых через RRC-сообщение. Поскольку DRS-конфигурации доставляются через RRC-сообщение, DRS-конфигурации доставляются в UE, которое находится в режиме RRC-соединения.
[206] Как пояснено выше, каждый набор DRS-конфигураций может включать в себя информацию по периоду, смещению, длительности, используемой для DRS-измерения. Информация по периоду, включенная в каждый набор DRS-конфигураций, может указывать период измерений DRS и смещение периода измерений. Соответственно, начальная точка длительности, когда UE возможно измеряет DRS, может определяться на основе информации по периоду и смещению. Тем не менее, фактическое измерение для DRS начинается с SSS (проиллюстрировано на 1120 по фиг. 11). Подробно, измерение для DRS начинается в первом субкадре, переносящем SSS в каждом периоде для периода измерений. Измерение UE для DRS длится в течение субкадра(ов), определенного на основе "длительности", включенной в каждый набор DRS-конфигураций. На фиг. 11, длительность 1150 задается равной 4 мс, и в силу этого измерение для DRS длится в течение 4 субкадров. Максимум длительности 1150 может задаваться равным 5 мс в настоящем описании изобретения.
[207] Предпочтительно, чтобы каждый набор DRS-конфигураций задавался для каждой частоты. Другими словами, одна и идентичная DRS-конфигурация может задаваться для отдельной частоты, и такие DRS-конфигурации могут быть применимыми к любой соте с использованием идентичной частоты. Дополнительно, если DRS-конфигурация задается для конкретной частоты из множества доступных частот, UE может выполнять DRS-измерение только для конкретной частоты, сконфигурированной для DRS, и выполнять унаследованное измерение для оставшихся частот. При выполнении унаследованного измерения для оставшихся частот, измерение UE не ограничивается интервалом/смещением/длительностью, включенными в DRS-конфигурацию. Соответственно, UE может непрерывно (при возможности) измерять традиционный PSS, SSS, CRS для оставшихся частот, которые не сконфигурированы с DRS-измерением.
[208]
[209] Другой рассматриваемый аспект представляет собой DRX-цикл, который является более сложным, поскольку может быть непросто устанавливать периодическую передачу сигналов обнаружения, которая совмещается со всеми DRX-циклами. Таким образом, можно предполагать, что UE может активироваться в течение DRX-цикла, совмещенного с интервалом передачи сигналов обнаружения, так что оно может выполнять измерение. Другими словами, если UE сконфигурировано с интервалом отсутствия сигнала для измерений (который может представлять собой дополнительный интервал отсутствия сигнала для измерений от интервала отсутствия сигнала для измерений, сконфигурированного для межчастотного измерения с использованием унаследованных сигналов), то можно предполагать, что UE выполняет измерение независимо от своих DRX-состояний. В этом случае, дополнительно можно предполагать, что UE может выбирать любой интервал сигнала обнаружения или интервал отсутствия сигнала для измерений, чтобы выполнять измерение с ограничением, что, по меньшей мере, одно измерение в расчете на DRX-цикл проведено. Например, если DRX-цикл составляет 1280 мс, причем интервал отсутствия сигнала для измерений сконфигурирован каждые 80 мс, то, выполняет или нет UE измерение один или более раз, может зависеть от реализации UE при условии, что оно выполняет измерение, по меньшей мере, один раз в расчете на DRX-цикл, чтобы удовлетворять требованию. Когда UE может создавать автономный интервал отсутствия сигнала, информация синхронизации помощи сети для улучшенной процедуры обнаружения может использоваться для того, чтобы определять, когда выполнять измерение.
[210]
[211] 1. Синтез PSS/SSS-последовательности
[212] Во-первых, описываются проектные решения по формированию сигналов PSS и/или SSS.
[213] Чтобы не допускать обнаружения PSS/SSS посредством унаследованных UE, желательно использовать различный ресурс с точки зрения времени и частоты между унаследованным PSS/SSS и PSS/SSS для DRS в улучшенной процедуре обнаружения. Кроме того, также заслуживает внимание использование различного кода, показанного в следующей таблице.
[214] Табл. 3

[215] При этом a, b и c являются различными числами от 25, 29 и 34. Это повышает сложность усовершенствованного UE с точки зрения поиска/синхронизации сот. Тем не менее, это обеспечивает возможность недопущения обнаружения улучшенных сигналов обнаружения посредством унаследованных UE.
[216]
[217] Кроме того, может быть недостаточным выполнять приблизительное частотно-временное отслеживание с использованием однократной PSS-передачи. Таким образом, должно быть желательным рассматривать многократную PSS-передачу, причем PSS-передача может возникать пакетным способом таким образом, что последовательные PSS-передачи могут возникать для нескольких субкадров, либо UE может получать приблизительную временную синхронизацию с использованием нескольких экземпляров PSS-передачи. Если используется второе, периодичность PSS-передачи не должна быть очень длительной. Например, по меньшей мере, интервал отсутствия сигнала для измерений (40 мс или 80 мс) может использоваться в качестве периодичности таким образом, что PSS передается каждые 40 мс или 80 мс. Если SSS используется для частотного отслеживания и/или временного отслеживания, также могут применяться аналогичные подходы для SSS.
[218]
[219] Когда передается PSS/SSS, для того чтобы повышать производительность обнаружения сот, могут рассматриваться несколько подходов.
[220] (1) SFN-передача PSS и/или SSS из нескольких сот в кластере
[221] (2) Только небольшое число сот передают PSS и/или SSS
[222] (3) PSS/SSS-подавление или ICIC: когда сигнал обнаружения состоит из PSS/SSS/CSI-RS (например, но не только из этой комбинации), чтобы улучшать способность к мультиплексированию PSS/SSS, также может рассматриваться TDM-подход для нескольких сот. Например, если передается сигнал обнаружения (сигналы обнаружения идентификаторов сот) каждые 200 мс, причем RS измерения, к примеру, CSI-RS, может передаваться более часто, к примеру, 40 мс, PSS/SSS может передаваться каждые 200 мс, тогда как CSI-RS передается каждые 40 мс. В первом интервале в 40 мс, сота 1 может передавать PSS/SSS/CSI-RS, тогда как другие соты передают только CSI-RS, во втором интервале в 40 мс, сота 2 может передавать PSS/SSS/CSI-RS, тогда как другие соты передают только CSI-RS, и т.д. Посредством этого, помехи в PSS/SSS могут минимизироваться, при этом измерение может выполняться для соты, которая обнаруживается посредством процедуры обнаружения сот. Это является аналогичным случаю, в котором PSS/SSS передается каждые 5 мс, тогда как CRS передается в каждом субкадре для измерения. С точки зрения измерения UE, UE может выбирать любые экземпляры CSI-RS-(или CRS-)передачи для своего измерения, если только одно измерение выполняется каждые 200 мс. Вместо TDM для субкадров, также может рассматриваться TDM в субкадре или FDM, причем PSS/SSS может передаваться в различных OFDM-символах посредством сдвига OFDM-символа в расчете на соту (или значение сдвига может быть связано с идентификатором соты) или сдвига частоты передачи. Пример показан на фиг. 12. Вместо нечастой передачи только PSS/SSS, весь RS может нечасто передаваться, причем различная сота может приспосабливать различный интервал, чтобы передавать набор сигналов обнаружения. Например, на чертеже, сота 1 может передавать PSS/SSS/CSI-RS в первом интервале в 40 мс, тогда как сота 2 может передавать PSS/SSS/CSI-RS во втором интервале в 40 мс. Если используется этот подход, может использоваться идентичная CSI-RS-конфигурация для различных сот или CRS-шаблон, причем TDM используется для нескольких сот, чтобы увеличивать ортогональность. Это может рассматриваться в качестве "смещения" с фиксированным периодом передачи сигналов обнаружения, причем передача сигналов обнаружения из каждой соты использует различное значение смещения.
[223] (4) Информация для PSS- и/или SSS-подавления? Список идентификаторов сот может быть сконфигурирован для UE, причем UE может выполнять PSS- и/или SSS-подавление в списке идентификаторов сот (что позволяет повышать производительность подавления).
[224]
[225] Следует отметить, что все предложенные идеи, применимые в данном случае к CSI-RS, могут быть применимыми к CRS в случае, если DRS состоит из PSS/SSS/CRS.
[226] При рассмотрении влияния унаследованных UE на передачу потенциально дополнительного PSS/SSS, который может охватываться посредством унаследованной ZP CSI-RS-конфигурации, желательно передавать PSS/SSS в OFDM-символе 2 и 3 во втором временном кванте, причем весь RB может охватываться посредством ZP CSI-RS-конфигурации для FDD/TDD с обычным CP. Для TDD с обычным CP, может использоваться OFDM-символ 1 и 3, причем весь RB может охватываться посредством не-ZP CSI-RS-конфигураций (и в силу этого ZP CSI-RS-конфигурация может охватывать PSS/SSS-передачу для сигнала обнаружения). Для расширенного CP, может рассматриваться OFDM-символ 4/5 для TDD/FDD, и OFDM-символ 1/3 может рассматриваться для TDD во втором временном кванте. Если CSI-RS не сконфигурирован для унаследованного UE, ZP CSI-RS-конфигурация конфигурируется согласно интервалу передачи сигналов обнаружения (например, каждые 40 мс конфигурируется ZP CSI-RS-конфигурация). Когда также сигнал обнаружения состоит из CSI-RS, могут рассматриваться несколько примеров передачи CSI-RS сигнала обнаружения.
[227] (1) Если полоса пропускания системы превышает 1,4 МГц, и CSI-RS передается по полной полосе пропускания системы или более чем по полосе пропускания на 1,4 МГц (для передачи сигналов обнаружения), может рассматриваться возможность "опускать" CSI-RS-передачу, когда CSI-RS конфликтует с PSS/SSS (для удобства, назовем DRS-CSI-RS как "CSI-RS", используемый для сигнала обнаружения, а DRS-PSS/DRS-SSS как "PSS/SSS", используемый для сигнала обнаружения). Это означает то, что DRS-CSI-RS может опускаться, если он конфликтует с DRS-PSS/DRS-SSS. Таким образом, DRS-CSI-RS передается по полной полосе пропускания системы (или полосе пропускания сконфигурированной системы) потенциально за исключением 6 центральных PRB, в которых передается DRS-PSS/DRS-SSS. Это является применимым, когда DRS-CSI-RS передается в идентичном OFDM-символе, в котором передается DRS-PSS/DRS-SSS. Пример показан на фиг. 13. (На фиг. 13 проиллюстрированы первый случай, в котором DRS-CSI-RS 1330 конфликтует с DRS-PSS 1310 и DRS-SSS 1320, и второй случай, в котором DRS-CSI-RS 1330 не конфликтует с DRS-PSS 1310 и DRS-SSS 1320). Если полоса пропускания системы составляет 1,4 МГц, чтобы передавать DRS-CSI-RS с другими сигналами, либо используется другая CSI-RS-конфигурация, не конфликтующая с другими сигналами, либо другой субкадр должен использоваться для DRS-CSI-RS-передачи.
[228] (2) Независимо от полосы пропускания системы, всегда DRS-CSI-RS может не передаваться, при этом DRS-PSS/DRS-SSS передается в любом PRB в идентичном OFDM-символе. Например, если PSS передается в OFDM-символе 2 второго временного кванта, то CSI-RS-конфигурация, охватывающая OFDM-символ 2 второго временного кванта, не используется для DRS-CSI-RS-конфигурации.
[229] В вышеуказанном проходе, DRS-PSS, DRS-SSS, DRS-CRS, DRS-CSI-RS и DRS-PRS указывают PSS, SSS, CRS, CSI-RS и PRS, включенные в DRS, соответственно. В одном аспекте настоящего описания изобретения, вышеуказанные RS могут быть аналогичными традиционным RS с точки зрения формирования последовательностей, но могут использоваться другие формы сигналов. Подробно, традиционный PSS и DRS-PSS могут передаваться через идентичную форму сигнала, тогда как схема передачи или выделение ресурсов могут по-разному примениться к обоим PSS. Соответственно, в зависимости от схемы передачи DRS-PSS, UE может предполагать, что DRS-PSS является идентичным традиционному PSS в некотором аспекте. Это также является применимым к традиционному SSS и DRS-SSS. Соответственно, традиционный SSS и DRS-PSS могут отличаться с точки зрения формирования последовательностей и выделения ресурсов.
[230]
[231] Когда CSI-RS используется для DRS, также целесообразно, что UE может быть сконфигурировано с CSI-RS-конфигурацией в основном для CSI-измерения. Если DRS-CSI-RS-конфигурация и CSI-RS-конфигурация являются идентичными для конкретной соты, оба CSI-RS могут использоваться для CSI-измерения. Если не указано иное, UE может предполагать, что только CSI-RS-конфигурация, сконфигурированная для CSI-измерения, используется для CSI-измерения.
[232]
[233] Если DRS-CSI-RS не передается, когда DRS-CSI-RS конфликтует с DRS-PSS или DRS-SSS, для измерения также может использоваться DRS-PSS и/или DRS-SSS. Например, чтобы измерять RSRP, все RE, переносящие DRS, могут использоваться для того, чтобы выполнять измерение. Для RSSI-измерения может возникать другая ситуация, если RSSI может измеряться только в OFDM-символах, выполненных с возможностью измерять RSSI или весь субкадр. Тем не менее, при рассмотрении случая, в котором DRS-PSS/DRS-SSS передается SFN-способом посредством нескольких сот (и в силу этого мощность накапливается), также может рассматриваться возможность не рассматривать DRS-PSS и/или DRS-SSS в RSRP-измерении. Альтернативно, поведение также может быть сконфигурировано посредством сети в отношении того, следует или нет включать эти RE для измерения. Обычно, если идентификатор соты, используемый для DRS-CSI-RS и DRS-PSS/DRS-SSS, является идентичным, оба RS могут использоваться для измерения. В противном случае, только один тип RS используется для измерения. Другой способ заключается в том, что RS, используемый для обнаружения/верификации сот, используется для измерения. Если DRS-CSI-RS в итоге используется для верификации сот, при этом частично DRS-PSS/DRS-SSS используется для обнаружения идентификаторов сот, только DRS-CSI-RS используется для измерения.
[234]
[235] Если CRS используется для сигнала обнаружения, этот вид проблемы может не существовать. Дополнительно, чтобы уменьшать влияние на унаследованные UE, субкадр, в котором передаются сигналы обнаружения, может быть сконфигурирован как MBSFN-субкадры.
[236]
[237] 2. Синтез CRS или CSI-RS, или PRS, используемого для идентификатора соты и измерения
[238] Даже если PSS/SSS может нечасто передаваться, CRS или CSI-RS, или PRS, используемый для измерения, возможно, должен передаваться чаще. Таким образом, когда сигнал обнаружения состоит из нескольких сигналов (например, PSS/SSS+CSI-RS), интервал/длительность передачи одного сигнала может отличаться от интервала/длительности передачи другого сигнала. Другими словами, интервал передачи сигналов обнаружения может быть фиксированным, однако то, присутствуют или нет несколько сигналов в одном эпизоде передачи сигналов обнаружения, может отличаться. Один пример заключается в том, чтобы передавать один PSS/SSS каждые 40 мс, тогда как CRS или CSI-RS передадутся в каждом субкадре (относительно MBSFN SF) для m субкадров (например, m=6). Альтернативно, более конкретно, PSS/SSS может передаваться каждые 40 мс субкадра №0/№5 (т.е. два раза за 40 мс), и CRS/CSI-RS может передаваться чаще PSS/SSS либо согласно текущей конфигурации (например, CRS является непрерывным за m субкадров, причем CSI-RS соответствует сконфигурированному периоду).
[239]
[240] Когда сигнал обнаружения (т.е. DRS) состоит из нескольких сигналов, может рассматриваться QCL-взаимосвязь между сигналами. Например, если PSS/SSS и CRS либо CSI-RS или PRS используются для сигналов обнаружения, антенные PSS/SSS-порты и антенные CRS- или CSI-RS- или PRS-порты могут иметь QCL-взаимосвязь относительно крупномасштабных свойств, таких как средняя задержка, разброс задержки, доплеровский разброс и доплеровский сдвиг (или поднабора свойств). Другими словами, если PSS/SSS, включенный в DRS, используется для приблизительного частотно-временного отслеживания, сигналы, используемые для приблизительного частотно-временного отслеживания, могут иметь QCL-взаимосвязь с сигналами, используемыми для идентификации или измерения сот. Кроме того, RS для идентификации сот может иметь QCL-взаимосвязь с RS, используемым для измерения. Явная передача в служебных сигналах QCL-взаимосвязи или поведения (к примеру, QCL-поведения A или B) может рассматриваться в UE через передачу служебных сигналов верхнего уровня. Альтернативно, преобразование между идентификатором соты, используемым посредством PSS/SSS и CSI-RS либо CRS или PRS, может передаваться в служебных сигналах.
[241]
[242] 3. Синтез сигналов обнаружения
[243] В дальнейшем в этом документе подробно поясняются признаки, связанные с синтезом сигналов DRS. Следующие признаки являются полезными, когда RS, включенные в DRS, имеют модифицированные признаки с учетом традиционных RS.
[244] При синтезе сигналов, включающих в себя PSS, SSS и CSI-RS, должны рассматриваться следующие проблемы:
[245] - Вследствие сильных помех в PSS/SSS, должно рассматриваться использование передачи PSS/SSS "с SFN", если подавление не может работать идеально, или PSS/SSS-подавление не используется;
[246] - Другими словами, PSS/SSS используются для частотно-временного отслеживания, и фактический поиск идентификатора соты может выполняться на основе CSI-RS;
[247] - Чтобы минимизировать число обнаружений идентификаторов соты (гипотез), дополнительно рассматривается совместно используемый идентификатор соты между сотами в кластере небольших сот, в котором виртуальный идентификатор соты может быть сконфигурирован для CSI-RS, причем виртуальный идентификатор соты может управляться посредством идентификатора соты, используемого для PSS/SSS. Например, виртуальный идентификатор соты представляет собой [физический идентификатор соты+min_ID, физический идентификатор соты+max_ID], причем физический идентификатор соты используется для формирования PSS/SSS;
[248] - В зависимости от качества SSS, могут передаваться одна либо две (или более) SSS-последовательностей; и
[249] - При рассмотрении потребления мощности UE и надежности, дополнительно может рассматриваться передача более одной DRS-PSS- и/или DRS-SSS-пары в одной передаче сигналов обнаружения.
[250]
[251] С точки зрения местоположения DRS-PSS и/или DRS-SSS, чтобы не допускать обнаружения DRS посредством унаследованных UE и также улучшать способность к мультиплексированию, может рассматриваться новое местоположение, отличающееся от Rel-8 PSS/SSS-местоположения. Как показано на фиг. 13, один пример заключается в том, чтобы использовать OFDM-символ 2/3 во втором временном кванте в обычном CP. Чтобы задавать различный интервал отсутствия сигнала относительно FDD, DRS-PSS/DRS-SSS может быть размещен в OFDM-символе 2/3, соответственно. Кроме того, поскольку UE ожидает принимать системную информацию через передачу служебных сигналов верхнего уровня или посредством приема системной информации, передаваемой в широковещательном режиме, когда сота обнаруживается (и целевая сота активируется), нет необходимости приспосабливать различный интервал отсутствия сигнала между FDD/TDD. Таким образом, предлагается использовать идентичный интервал отсутствия сигнала между DRS-PSS/DRS-SSS независимо от дуплекса. Кроме того, вместо комбинации DRS-PSS/DRS-SSS, также могут рассматриваться следующие комбинации.
[252] (1) DRS-PSS0/DRS-PSS1, при этом PSS0 и PSS1 могут иметь различный код (сформированный посредством различных индексов корня); и
[253] (2) DRS-PSS/DRS-SSS0/DRS-SSS1, при этом SSS0 и SSS1 могут формироваться, как если они передаются в субкадре №0/№5 при формировании SSS-последовательности Rel-8.
[254]
[255] Возможные варианты местоположений DRS-PSS/DRS-SSS должны исключать коллизию с:
[256] (1) PDCCH (по меньшей мере, один или два OFDM-символа);
[257] (2) CRS (по меньшей мере, для одного антенного порта);
[258] (3) PSS;
[259] (4) SSS: когда SSS передается и используется для сигнала обнаружения, может использоваться SSS0 или SSS1 (последовательность, передаваемая в субкадре №0 или субкадре №5). Тем не менее, нежелательно использовать обе последовательности, если UE не обнаруживает индекс субкадра или SFN соты посредством считывания двух SSS-последовательностей;
[260] (5) Потенциальное рассмотрение исключения коллизии с PBCH; и
[261] (6) Защитный период.
[262]
[263] Фиг. 14 показывает возможные варианты местоположений DRS-PSS и DRS-SSS согласно одному аспекту настоящего описания изобретения.
[264] В нормальном субкадре, возможные варианты местоположений должны быть следующими.
[265] Как проиллюстрировано, в обычном CP, может использоваться OFDM-символ 2/3 каждого временного кванта. В расширенном CP, может использоваться OFDM-символ 1/2 во втором временном кванте. В специальном субкадре, могут рассматриваться OFDM-символ 2/3 в первом временном кванте или 1/2 в первом временном кванте в нормальном/расширенном CP. Если также передается DRS-CSI-RS, чтобы исключать коллизию с PSS/SSS, либо DRS-CSI-RS может не передаваться в PRB, в которых DRS-CSI-RS конфликтует с PSS/SSS (это может оказывать влияние на производительность сигнала обнаружения), либо для того, чтобы исключать влияние на производительность, дополнительно можно предположить, что DRS-CSI-RS передается в системе с нецентральными 6 PRB, только если полоса пропускания системы превышает 6 PRB. Альтернативно, сигнал обнаружения может передаваться только в субкадре, в котором PSS/SSS не передается посредством конфигурации сети, и в силу этого не должна возникать коллизия. Когда DRS конфликтует с PBCH, усовершенствованное UE может предполагать, что DRS передается независимо от PBCH (и в силу этого PBCH согласуется по скорости или прореживается). Поскольку унаследованное UE не знает о DRS-сигнале, оно может предполагать, что PBCH передается, при этом оказывается влияние на производительность унаследованного UE, поскольку DRS может переопределять RE, конфликтующие с PBCH.
[266] Кроме того, при передаче DRS, число антенных портов, которое может определять RE-плотность DRS-сигнала, может определяться независимо от фактических антенных портов, указываемых посредством антенных PBCH-портов. Чтобы обеспечивать плотную DRS-передачу, должно быть желательным фиксировать 4 антенных порта (только для RE-преобразования), причем фактическая передача может выполняться через один антенный порт или несколько антенных портов. С точки зрения вычисления RSRP, UE может предполагать, что передача выполняется из одной антенны, так что все RE могут использоваться для измерения. Фиг. 15 показывает DRS-RS-шаблон на основе CRS согласно настоящему описанию изобретения.
[267] Если CSI-RS используется для DRS, 4-антенный порт предположительно может определять RE-позицию, в которой фактическая передача может выполняться через один порт или несколько портов, если она сконфигурирована посредством верхнего уровня или известна для UE. Другими словами, CDM не может быть использовано. Последовательность может формироваться при условии одного антенного порта, причем идентичная последовательность передается для местоположения ресурсов, в котором 4 антенных порта предполагаются в текущей CSI-RS-конфигурации, как указано в технических требованиях Rel-11. Другими словами, пример преобразования может быть основан на следующей формуле. Если UE не получает информацию относительно антенного порта, оно может предполагать передачу по одному антенному порту.
[268] Математический фиг. 4


[269]
[270] Если используется PRS, шаблон с одним или двумя антенными PBCH-портами используется для DRS, при этом плотность PRS выше 4 портов.
[271]
[272] 4. Мультиплексирование DRS с передачей данных
[273] Когда передается сигнал обнаружения (т.е. DRS), если сота находится в активированном состоянии, или возникает MBMS-передача, передача данных может возникать. С точки зрения MBMS-передачи, нежелательно передавать MBMS-передачу в субкадрах, в которых передаются сигналы обнаружения, поскольку она может занимать ресурсы в MBMS-области. Таким образом, UE, ожидающее принимать MBMS, может не ожидать приема сигнала обнаружения в субкадре. Например, если UE выполнено с возможностью принимать MBMS-услуги и/или MBMS-субкадры, измерение для DRS может выполняться в соответствующем субкадре. Для передачи данных в активированном состоянии, для усовершенствованного UE, должен рассматриваться шаблон согласования скорости. UE, в случае конфигурирования с одной или более CSI-RS-конфигураций с нулевой мощностью (ZP), используемых для сигнала обнаружения, может предполагать, что данные полностью согласуются по скорости с этими элементами ресурсов. Другими словами, шаблон подавления или согласования скорости может быть сконфигурирован для UE независимо от фактической передачи сигналов обнаружения. UE дополнительно предполагает то, что другие сигналы, такие как PSS/SSS, CSI-RS, могут передаваться в тех ZP CSI-RS-конфигурациях, в которых по-прежнему данные согласуются по скорости вокруг этих RE. Идентичное согласование скорости может применяться к вычислению числа доступных RE для ePDCCH-ресурса, когда EPDCCH сконфигурирован в этом субкадре. Другими словами, эти RE, сконфигурированные посредством ZP CSI-RS-конфигураций для сигнала обнаружения, не должны учитываться для доступных для EPDCCH RE, и должны проводиться необходимые процедуры для того, чтобы определять минимальный уровень агрегирования и преобразование ресурсов.
[274] Если длина CP, используемая для сигнала обнаружения и передачи данных, отличается (например, расширенный CP для DRS и обычный CP для передачи данных), когда возникает передача данных, то усовершенствованное UE должно предполагать, что CP, используемый для DRS, также используется для передачи данных в этом субкадре, включающем в себя как данные, так и ePDCCH-передачу (и также для PDCCH-передачи).
[275] Кроме того, при рассмотрении случая, в котором DRS передается только через подполосу частот (а не через полную полосу пропускания системы), ZP CSI-RS-конфигурация также может включать в себя список PRB или полосу пропускания, в которой может применяться ZP CSI-RS-конфигурация.
[276]
[277] При рассмотрении работы в режиме CoMP, когда используется динамический выбор точки (DPS), при рассмотрении передачи сигналов обнаружения, более одной ZP CSI-RS-конфигурации может быть сконфигурировано в расчете на PQI-запись, причем одну следует использовать для согласования скорости передачи данных для CSI-RS-конфигураций (соседних сот), а другая используется для согласования скорости передачи данных для DRS-конфигураций. Поскольку интервал может отличаться между двумя ZP CSI-RS-конфигурациями, лучше конфигурировать различные ZP CSI-RS-конфигурации или, по меньшей мере, две различных конфигурации интервалов/смещений. Это может быть применимым только к усовершенствованным UE. При рассмотрении потенциального перескока частот CSI-RS-ресурсов DRS-сигнала, если требуется, шаблон перескока частот или изменение конфигурации может указываться в CSI-RS-конфигурации, используемой для DRS. Другими словами, ZP CSI-RS-конфигурация, сконфигурированная для DRS, может иметь зависимое от индекса субкадра или зависимое от SFN RE-преобразование или преобразование конфигурации, так что фактические ZP CSI-RS RE-позиции могут изменяться во времени согласно предварительно определенному или сконфигурированному на верхнем уровне шаблону. Альтернативно, просто ZP CSI-RS-конфигурация, которая состоит из нескольких NZP CSI-RS-конфигураций для нескольких DRS-сигналов из нескольких соседних сот, может быть сконфигурирована для UE, причем фактическое преобразование между RE в DRS-CSI-RS из конкретной соты может изменяться во времени или для SFN. Другими словами, идентификатор соты=1 может передавать CSI-RS в CSI-RS-конфигурации №0 один раз, причем в следующий раз он может передавать CSI-RS-конфигурацию №1. Независимо от фактического изменения местоположения, UE может предполагать то, что RE, сконфигурированные в ZP CSI-RS-конфигурации, согласуются по скорости.
[278] Согласование скорости может применяться для SPS, также согласно конфигурации в расчете на субкадр, в котором передается SPS-PDSCH.
[279] Как пояснено выше, по меньшей мере, две различных конфигурации интервалов/смещений для ZP CSI-RS-конфигурации могут поддерживаться в настоящем описании изобретения. В одном примере, максимальное число различных конфигураций интервалов/смещений может быть ассоциировано с длительностью, в течение которой UE выполняет измерение для DRS (как проиллюстрировано на фиг. 11). Как пояснено выше, максимальная длина длительности может задаваться равной 5 мс, и в силу этого максимальное число различных конфигураций интервалов/смещений может задаваться равным 5. А именно, нуль или максимум пять различных конфигураций интервалов/смещений, используемых для ZP CSI-RS, могут использоваться в настоящем описании изобретения. Когда, по меньшей мере, две конфигурации интервалов/смещений предоставляются, интервал/смещение отдельно сконфигурированы.
[280]
[281] 5. Неправильно совмещенный SFN между сотами
[282] Если соты, передающие сигналы обнаружения (т.е. DRS) в кластере небольших сот, не совмещаются с точки зрения SFN, имеется потребность в том, чтобы выбирать соту, которая может использоваться в качестве "опорной" для того, чтобы передавать сигналы обнаружения в идентичном субкадре. Альтернативно, SFN наложенного макроузла используется в качестве опорного. Кроме того, возможно то, что обслуживающая сота обеспечивает значение смещения (между обслуживающей сотой и целевой сотой), или соты для обнаружения могут быть сконфигурированы для UE вместе с информацией синхронизации сигнала обнаружения. В частности, это необходимо, если DRS передается в фиксированном субкадре/SFN, к примеру, каждые 40 мс с SFN%4=0 передает DRS, то UE должно знать SFN и/или индекс субкадра целевой соты (или соты, чтобы обнаруживать). Тем не менее, соты, передающие сигналы обнаружения, могут совмещать себя в пределах периода отсутствия сигнала для измерений таким образом, что UE может обнаруживать несколько сот за одну попытку. Таким образом, этот SFN и/или субкадровое смещение либо фактическое значение могут быть сконфигурированы для каждой частоты, а не в расчете на соту. Это может применяться в интервале отсутствия сигнала для измерений (или в аналогичной конфигурации для объекта измерения на основе сигналов обнаружения), в котором смещение может использоваться для того, чтобы указывать значение смещения между обслуживающей и соседними сотами для измерения на основе сигналов обнаружения. Тем не менее, UE может не предполагать, что сигналы обнаружения из нескольких сот могут поступать в идентичном субкадре.
[283] Как пояснено выше, в случае если определенное число небольших сот передает DRS, может возникать неправильное совмещение между различными DRS, и в силу этого период измерений и смещение DRS, заданные для UE, могут не быть достаточной информацией, позволяющей UE определять корректную синхронизацию для DRS-измерения. Соответственно, UE должно выбирать соту, которая может использоваться в качестве опорной, чтобы передавать DRS в идентичном субкадре. Как пояснено выше, номер системного кадра (SFN) макросоты (например, первичной соты) может выбираться в качестве опорного для неправильного совмещения.
[284]
[285] 6. Несовмещенный CP между сотами
[286] Чтобы защищать сигналы обнаружения (т.е. DRS), желательно конфигурировать отдельные CSI-RS-конфигурации с нулевой мощностью, охватывающие сигналы обнаружения, передаваемые посредством сот с использованием различного CP. Например, для связанной с сигналами обнаружения конфигурации, может указываться используемый CP, либо более одной связанной с сигналами обнаружения конфигурации могут быть сконфигурированы в расчете на каждую длину CP. Например, DRS-PSS/DRS-SSS может передаваться в различных OFDM-символах для обычного CP и расширенного CP. Таким образом, желательно передавать в другом субкадре сигналов обнаружения. Альтернативно, один простой подход заключается в том, чтобы использовать "расширенный CP" или "обычный CP" независимо от фактического CP, используемого для передачи данных. В этом случае, фактический CP, используемый для передачи данных, должен быть сконфигурирован для UE (или обнаружен посредством UE) после конфигурирования обнаруженной соты. Если это используется, UE может не предполагать, что CP, используемый для сигнала обнаружения, является идентичным для CP, используемого для передачи данных. Это должно быть полезным, когда DRS-PSS/DRS-SSS передается SFN-способом, и точность частотно-временной синхронизации не может быть настолько высокой посредством однократного DRS-PSS/DRS-SSS, и в силу этого передача DRS-CSI-RS или DRS-CRS с использованием расширенного CP должна быть полезной для производительности UE. Тем не менее, это имеет такой недостаток, что мультиплексирование данных и сигнала обнаружения должно становиться более сложным, в частности, для унаследованных UE. Когда только один тип CP используется для DRS, чтобы формировать DRS-сигнал, Ncp не может использоваться. В общем, индекс субкадра и Ncp, который может не быть релевантным для DRS, не могут использоваться для формирования последовательностей. Это является особенно важным в случае, когда UE не знает SFN или индекс временного кванта целевой соты для обнаружения либо то, откуда передается DRS.
[287]
[288] 7. TDD-дуплекс
[289] Когда используется TDD, в зависимости от TDD DL/UL-конфигураций, число субкадров нисходящей линии связи ограничено. При рассмотрении того, что субкадр №0/№5 используется в основном для PSS/SSS- и PBCH/SIB-передачи, и сигнал обнаружения может передаваться в то время, когда сота также находится в активированном состоянии, должно рассматриваться использование специального субкадра. В этом случае, для унаследованного UE, длительный защитный период может иметь такую конфигурацию, в которой унаследованное UE может не ожидать приема RS в специальных субкадрах, в которых усовершенствованное UE может быть сконфигурировано с передачей сигналов обнаружения наряду с другой конфигурацией защитного периода. Для этого, может рассматриваться новая CSI-RS-конфигурация в специальном субкадре, а также новая ZP CSI-RS-конфигурация, охватывающая эти новые CSI-RS-конфигурации, указываемые в специальных субкадрах. Для конфигурации специального субкадра, UE может быть сконфигурировано с конфигурацией специального субкадра, используемой для передачи сигналов обнаружения и потенциально используемой для передачи данных (для усовершенствованных UE). Альтернативно, UE может предполагать, что защитный период является идентичным защитному периоду, сконфигурированному в SIB (идентичным унаследованным UE), тогда как сигналы обнаружения могут передаваться в этом защитном периоде согласно конфигурациям передачи сигналов обнаружения. В этом случае, ZP CSI-RS-конфигурации для DRS могут не требоваться.
[290]
[291] Следует отметить, что UE может быть сконфигурировано с дуплексным режимом каждого частотного уровня, когда вспомогательная информация сети доступна, так что UE может предполагать определенный шаблон PSS/SSS и/или CSI-RS/CRS в расчете на дуплексный тип в расчете на каждую частоту. Другими словами, декодирование вслепую различного PSS/SSS-местоположения, чтобы определять дуплексный режим, может не требоваться, если используется улучшенная процедура обнаружения. Кроме того, UE может быть сконфигурировано с длиной CP, используемой на каждой частоте (по меньшей мере, для DRS-передачи), так что декодирование вслепую длины CP может не требоваться в любом случае при улучшенной процедуре обнаружения.
[292]
[293] Когда используется улучшенное уменьшение помех и адаптация трафика (eIMTA) TDD, возможно то, что субкадр, в котором диспетчеризован сигнал обнаружения, изменяется на субкадр восходящей линии связи. Чтобы исключать такой тип ситуации, важно обеспечивать возможность того, что только субкадр, сконфигурированный в качестве субкадра нисходящей линии связи посредством блока системной информации (SIB), может передавать сигналы обнаружения. В противном случае, UE может предполагать, что сигнал обнаружения не присутствует в субкадрах, измененных на субкадр восходящей линии связи, указываемый посредством динамической передачи служебных сигналов. Альтернативно, также возможно то, что eNB передает DRS независимо от DL- или UL-субкадра согласно сконфигурированной конфигурации DRS-передачи. Это должно быть полезным, в частности, для измерения соседних сот.
[294] Как пояснено выше, eIMTA представляет собой схему, в которой определенный TDD-субкадр восходящей линии связи, первоначально выделяемый для определенной передачи (например, по восходящей линии связи), динамически выделяется для другой (например, по нисходящей линии связи). Соответственно, если eIMTA используется для UE, сконфигурированного с возможностью выполнять DRS-измерение на основе DRS-конфигурации, заданной посредством сети, следует прояснять, какие TDD-субкадры предположительно переносят DRS. Чтобы дополнительно улучшать современный уровень техники, настоящее описание изобретения предлагает предполагать, что TDD-субкадр нисходящей линии связи, выделяемый посредством SIB, представляет собой только субкадр(ы), переносящий DRS.
[295]
[296] Относительно специальных TDD-субкадров (например, DwPTS и UpPTS), следующее улучшение дополнительно предложено посредством настоящего описания изобретения.
[297] Для DwPTS-области для соседних сот, если не указано иное, UE может предполагать кратчайшую DwPTS-область. Альтернативно, оно может предполагать, что идентичная DwPTS-конфигурация используется для соседних сот из обслуживающей соты. Альтернативно, DwPTS-область может быть сконфигурирована для каждой частоты (вместе с потенциальной конфигурацией UL/DL).
[298] Подробнее, на основе современного уровня техники, возникает такая техническая проблема, что UE не знает точную длину специальных TDD-субкадров соседних сот при измерении DRS. Соответственно, настоящее описание изобретения предлагает, чтобы UE предполагало то, что длина DwPTS-области в качестве длины специальных TDD-субкадров соседних сот при измерении DRS.
[299]
[300] 8. Обработка точности кратковременного измерения/обнаружения
[301] При рассмотрении случая, в котором UE может выполнять обнаружение сот для соты нечасто (например, каждые 200 мс), важно, что UE может обнаруживать соту в одной попытке с тем, чтобы не увеличивать время задержки обнаружения сот, либо если DRS-передача возникает достаточно редко, важно обеспечивать осуществимость обнаружения соты в одном экземпляре DRS-передачи. Чтобы повышать производительность обнаружения и измерения сот, должны рассматриваться некоторые аспекты. Один заключается в точности частотно-временного отслеживания посредством однократной PSS/SSS-передачи в интервале DRS-передачи. Следовательно, необходимо рассматривать случай, в котором может требоваться многократная PSS/SSS-передача. Чтобы передавать несколько PSS/SSS, может рассматриваться множественная передача для нескольких субкадров или множественная передача в субкадре. Проблема множественной передачи в субкадре состоит в том, что становится сложным мультиплексировать DRS с существующим RS, когда сота находится в активированном состоянии. Таким образом, когда она используется, OFDM-символ, используемый для передачи CRS, не может использоваться для передач DRS-сигналов. Альтернативно, в этом случае, поскольку UE может использовать CRS для идентичной цели, DRS, конфликтующий с существующими сигналами, может опускаться. Тем не менее, это может оказывать влияние на производительность обнаружения соседней соты, которое может не иметь сведения по состоянию соты, нежелательно изменять DRS-передачу в зависимости от состояния соты. Тем не менее, если имеется механизм, с помощью которого UE может обнаруживать состояние соты, также может рассматриваться другая структура DRS-сигнала. Когда DRS-передача возникает для нескольких субкадров, с учетом потенциально различных TDD DL/UL-конфигураций и различного дуплекса и коллизия с субкадром №0, число повторений не может превышать два субкадра. В частности, в TDD, если два субкадра используются для DRS-передачи, чтобы работать с большинством конфигураций специальных субкадров, желательно передавать DRS-PSS/DRS-SSS в первом временном кванте, а не во втором временном кванте. Это означает то, что первый DRS-PSS/DRS-SSS может быть размещен в другом OFDM-символе относительно второго DRS-PSS/DRS-SSS. Альтернативно, дополнительно может рассматриваться только DRS-PSS- или DRS-SSS-повторение.
[302]
[303] С точки зрения измерения, по-прежнему должно быть желательным проводить несколько измерений во времени, чтобы отражать изменения состояния канала (например, затухание, доплеровский эффект и т.д.), так что если возникает повторение, должно быть желательным уменьшать DRS-сигналы, используемые для интервала передачи измерения (к примеру, DRS-CSI-RS). Например, если DRS-PSS/DRS-SSS передается каждые 200 мс, DRS-CSI-RS может передаваться каждые 40 мс, причем 5 выборок DRS-CSI-RS могут накапливаться для измерения. Тем не менее, также важно повторять RS измерения для нескольких субкадров в DRS-интервале.
[304]
[305] При рассмотрении случая, в котором подавление может выполняться для местоположений PRB, в которых передается DRS, другими словами, PRB в субкадре может переносить DRS только из потенциально нескольких сот, данные не могут быть диспетчеризованы в этих PRB, хотя сота находится в активированном состоянии, DRS-сигналы могут использовать все RE. Один пример заключается в том, чтобы использовать формат PRS-конфигурации либо повторяемые CRS- или повторяемые CSI-RS-конфигурации. Кроме того, также может рассматриваться повторение PSS/SSS. Когда это рассматривается, по-прежнему, OFDM-символы, используемые для PDCCH, не могут использоваться для DRS, поскольку PDCCH должен охватываться по полной полосе пропускания системы. Кроме того, если EPDCCH-набор сконфигурирован поднабора полных PRB, используемых для DRS, обработка EPDCCH требуется посредством невыполнения диспетчеризации EPDCCH или посредством eNB-диспетчеризации. Другими словами, если предполагается то, что UE может предполагать, что DRS передается независимо от передачи данных или состояния соты или EPDCCH-конфигурации. Либо предполагаются максимальные OFDM-символы, используемые для PDCCH, когда DRS синтезируется (например, 3 для полосы пропускания системы превышает 1,4 МГц, 4 для 1,4 МГц), либо UE может предполагать, что PDCCH не должен перекрываться с DRS в случае конфигурации, в которой DRS может использовать все OFDM-символы за исключением одного или двух OFDM-символов, зарезервированных для PDCCH-передачи.
[306]
[307] 9. Алгоритмы обнаружения сот с использованием нескольких сигналов для DRS
[308] Когда несколько сигналов используются для сигналов обнаружения, предусмотрено несколько подходов для использования этих сигналов для обнаружения идентификаторов сот, измерения и т.д. В этом разделе описываются несколько альтернативных подходов и потенциальных выгод и недостатков каждого подхода. Для удобства предположим, что сигнал обнаружения может состоять из PSS, SSS и CSI-RS либо PSS, SSS и CRS. То, включает одна DRS-передача в себя только один PSS, SSS и CSI-RS или PSS, SSS и CRS, либо может использоваться их кратное число, не является фиксированным. Для удобства, это подробное описание поясняет один пример с использованием одной передачи каждого сигнала. Тем не менее, оно может применяться ко множественной передаче каждого сигнала без потерь общности.
[309]
[310] Первая категория
[311] Обнаружение сот использует все три сигнала:
[312] (1) Идентификатор соты состоит из[n_cid_1]*xy+[n_cid_2]*y+[n_cid_3], где, например, y равно 17, а x равно 10. PSS может переносить n_cid_1, и SSS может переносить n_cid_2, а CSI-RS или CRS может переносить n_cid_3, когда последовательность формируется для каждого сигнала. Более конкретно, n_cid_2 может использоваться для того, чтобы указывать местоположение CSI-RS-конфигурации/ресурса или CRS-V-сдвига/ресурса. Другими словами, n_cid_2 (индикатор идентификатора второй соты) может использоваться для того, чтобы указывать местоположение CSI-RS- или CRS-ресурса. В качестве примера, идентификатор соты=308 может представляться как n_cid_1, n_cid_2=6, n_cid_3=17, причем если используется CSI-RS, и полные конфигурации, используемые для CSI-RS, составляют 10 наборов, конфигурация 6 может использоваться для переноса DRS для соты. Местоположение может преобразовываться или логически выводиться из n_cid_1 и/или n_cid_2. Точная функция может отличаться. Принцип этого подхода заключается в том, чтобы разделять идентификаторы сот на несколько сигналов, с тем чтобы уменьшать число возможных вариантов в расчете на каждый сигнал, и если CRS или CSI-RS, который может иметь несколько возможных вариантов местоположений ресурсов, частичный или полный идентификатор соты может использоваться для того, чтобы логически выводить местоположение ресурсов этих сигналов.
[313] (2) Идентификатор соты является идентичным Rel-8 PSS/SSS, причем CRS или CSI-RS может переносить полный идентификатор соты: в этом случае, идентификатор соты не может разделяться дополнительно, и может многократно использоваться идентичная последовательность для PSS и/или SSS. Тем не менее, обнаружение идентификаторов сот может выполняться с использованием нескольких сигналов. Например, вместо базирования на PSS/SSS для обнаружения сот, все сигналы используются для обнаружения идентификатора соты. В этом случае, обнаружение PSS может быть идентичным реализации Rel-8, тогда как обнаружение идентификатора соты с использованием SSS может быть немного изменено, чтобы использовать SSS и/или CSI-RS (или CRS). При формировании последовательности, SSS и CSI-RS могут использоваться объединенно, так что идентичное скремблирование может использоваться в различных местоположениях ресурсов. С точки зрения обнаружения корреляции, корреляция PSS и либо из SSS, либо из CSI-RS/CRS может использоваться для обнаружения сот.
[314]
[315] Вторая категория
[316] Обнаружение сот использует только один сигнал, к примеру, CSI-RS и/или CRS.
[317] (1) Если это используется, частотное отслеживание или временное отслеживание может выполняться через PSS и/или SSS. С точки зрения идентификатора соты, может использоваться общий идентификатор соты. Когда сетевая синхронизация не достигается между небольшими сотами, и в силу этого разность синхронизации передачи между небольшими сотами может превышать 3 мкс, может быть неэффективным использовать идентичный идентификатор соты для PSS/SSS. В этом случае, идентичный идентификатор соты может совместно использоваться только синхронизированными сотами. Таким образом, несколько идентификаторов сот могут обнаруживаться посредством обнаружения PSS и/или SSS, причем каждый идентификатор соты представляет различную синхронизацию или группировку. Идентификатор, обнаруженный посредством PSS/SSS, может не быть связан с идентификатором соты, обнаруженным посредством CSI-RS или CRS. Другими словами, последовательность или скремблирование, используемая в частотно-временном отслеживании, не может использоваться для обнаружения идентификаторов сот. Альтернативно, идентификатор, обнаруженный посредством PSS/SSS, может использоваться для скремблирования CSI-RS или CRS, как показано в вышеописанных подходах.
[318] (2) Чтобы минимизировать повышение сложности, UE может предполагать целую или частичную помощь сети, к примеру, дуплексный тип или длину CP и т.д.
[319] Если используется эта категория, комбинация сигнала обнаружения может быть следующей:
[320] (1) PSS+CSI-RS, допускающий PSS, является достаточным для частотно-временного отслеживания для CSI-RS-обнаружения сот. Если производительность частотно-временного отслеживания с помощью PSS не является достаточной, дополнительно может рассматриваться частотное отслеживание с использованием CSI-RS. В этом случае, предварительно определенное местоположение CSI-RS-ресурса является важным для того, чтобы гарантировать производительность;
[321] (2) PSS+PSS+CSI-RS, причем два PSS-сигнала используются для частотно-временного отслеживания, и CSI-RS используется для обнаружения и измерения идентификаторов сот;
[322] (3) PSS+CRS;
[323] (4) PSS+PSS+CRS; и
[324] (5) PSS+SSS+CRS (+CSI-RS): в этом случае, UE может предполагать, что CSI-RS присутствует, только если сконфигурирован с CSI-RS-конфигурацией, такой как идентификатор скремблирования, конфигурации ресурсов для CSI-RS и т.д.
[325] Когда несколько PSS передается, вместо передачи нескольких сигналов в идентичном субкадре, могут быть использованы два или несколько субкадров.
[326]
[327] Третья категория
[328] Обнаружение сот использует только PSS/SSS:
[329] (1) Если это используется, обнаружение сот может выполняться аналогично обнаружению сот согласно Rel-8 без предположения потенциального агрегирования нескольких PSS/SSS во времени (они могут быть агрегированы в зависимости от времени задержки требования по обнаружению сот, однако, желательно иметь возможность обнаруживать идентификатор соты посредством однократного PSS/SSS или одного пакета DRS); и
[330] (2) Когда это используется, измерение также может выполняться с использованием PSS/SSS, либо дополнительный RS, к примеру, CRS или CSI-RS, может использоваться для измерения.
[331]
[332] 10. Потенциальная вспомогательная информация сети и передача служебных сигналов
[333] В общем, местоположение передачи сигналов обнаружения может быть либо фиксированным в технических требованиях, либо конфигурируемым посредством верхнего уровня. Поскольку выполняется такой синтез, чтобы обеспечивать более высокое мультиплексирование/ортогональность, желательно иметь возможность конфигурировать периодичность и/или смещение передачи сигналов обнаружения. Кроме того, при рассмотрении случая, в котором наложенный макроузел не может совмещаться с точки зрения SFN, может быть полезной некоторая гибкость для того, чтобы конфигурировать периодичность и смещение. Тем не менее, по-прежнему целесообразно предварительно фиксировать местоположение передачи сигналов обнаружения.
[334] Независимо от того, являются периодичность и смещение передачи сигналов обнаружения предварительно фиксированными или конфигурируемыми, требуется некоторая вспомогательная информация сети, чтобы помогать обнаружению сети. По меньшей мере, некоторая синхронизация, с которой UE может находить сигналы обнаружения, должна требоваться, и синхронизация и длительность этой синхронизации может определяться на основе требования по производительности обнаружения.
[335] Один пример заключается в том, чтобы использовать текущую конфигурацию интервалов отсутствия сигнала для измерений, поскольку именно в этом случае UE должно предполагать, что сигнал обнаружения не может передаваться нигде, кроме сконфигурированного интервала отсутствия сигнала для измерений. Таким образом, автономное обнаружение сот с использованием сигнала обнаружения может быть более сложным. В этом случае, посредством надлежащей сетевой координации, посредством конфигурирования интервала отсутствия сигнала для измерений для каждого UE, могут задаваться периодичность и смещение сигнала обнаружения. Тем не менее, целесообразно то, что каждая частота использует различное смещение, в силу чего отдельный интервал отсутствия сигнала для измерений или периодичность/смещение могут быть сконфигурированы для каждой частоты. Кроме того, список идентификаторов сот для каждой частоты и список возможных вариантов местоположений, в которых передаются сигналы обнаружения, также могут быть переданы в служебных сигналах, чтобы помогать обнаружению сети в UE. Список возможных вариантов местоположений может быть предварительно определен, и в силу этого конфигурирование может не требоваться.
[336] Альтернативно, чтобы рассматривать несколько частот и различное смещение для каждой частоты, интервал отсутствия сигнала для измерений может быть сконфигурирован, к примеру:
[337] * Интервал измерений: максимальный интервал передачи сигналов обнаружения, к примеру, 200 мс
[338] * Значения смещения для измерений
[339] * Набор {частота, смещение}
[340] При этом UE может выполнять измерение на определенной частоте при данном значении смещения. Чтобы не подвергаться слишком большому объему служебной информации и прерыванию, значение смещения желательно должно быть кратным числом текущего интервала отсутствия сигнала для измерений, к примеру, 40/80мс+delta_offset. Другими словами, UE может выполнять измерение для набора частот примерно каждые 40 мс или 80 мс, и интервал передачи сигналов обнаружения может превышать типичный интервал отсутствия сигнала для измерений. Альтернативно, различное смещение может использоваться в расчете на набор сот. Таким образом, в этом случае:
[341] * Интервал измерений: максимальный интервал передачи сигналов обнаружения, к примеру, 200 мс
[342] * Значения смещения для измерений
[343] * Набор {частота, идентификаторы сот, смещение}
[344]
[345] Кроме того, при нахождении местоположения DRS-RS также может требоваться вспомогательная информация. Один пример заключается в том, чтобы предоставлять конфигурационную информацию относительно местоположения "SSS" или "PSS", или дополнительного "SSS", или дополнительного "PSS" с точки зрения OFDM-символа или частоты. Кроме того, интервал отсутствия сигнала, используемый между PSS и SSS согласно каждому NCID (2), используемому для PSS-скремблирования, например, может быть сконфигурирован для всех значений NCID (либо для таблицы преобразования, либо для индекса, чтобы указывать таблицу преобразования). Альтернативно, если используется DRS CSI-RS-типа, может быть сконфигурирована CSI-RS-конфигурация или преобразование между позицией CSI-RS-ресурсов и идентификатором соты. Один пример представляет собой общее число CSI-RS-конфигураций (например, 10 или 20), в которых может предоставляться начальное смещение, причем каждая сота находит свой DRS в идентификаторе соты %max_configuration_number+offset из числа осуществимых конфигураций или позиций ресурсов. Например, если 10 CSI-RS-конфигураций используются с offset=0, то идентификатор соты % 10=0 использует CSI-RS-конфигурацию №0, идентификатор соты % 10=1 использует CSI-RS-конфигурацию №0, и т.д.
[346]
[347] Кроме того, может быть сконфигурировано преобразование между идентификатором соты и значением Vshift, причем, например, если CRS с Vshift используется для сигнала обнаружения, вместо обеспечения соответствия текущим техническим требованиям, различный Vshift согласно преобразованию может определяться, если предоставляется передача служебных сигналов верхнего уровня.
[348]
[349] Кроме того, при рассмотрении случая, в котором информация синхронизации в сети неизвестна для eNB или сот, максимальная неопределенность с точки зрения синхронизации также может быть сконфигурирована таким образом, что UE может приспосабливать максимальную неопределенность с точки зрения применения интервалов отсутствия сигнала для измерений. Наряду с максимальной неопределенностью, UE может быть сконфигурировано с большим интервалом отсутствия сигнала для измерений, чтобы находить сигналы обнаружения для целевых сот. Большой интервал отсутствия сигнала для измерений может использоваться один раз или только несколько раз. После того, как UE обнаруживает информацию синхронизации передачи сигналов обнаружения, UE может сообщать обнаруженное значение "смещения" в обслуживающую соту, так что может быть сконфигурирован меньший интервал отсутствия сигнала для измерений. Например, если обслуживающая сота и целевые соты отключаются через 30 мс, и обслуживающая сота не знает информацию синхронизации, она может конфигурировать максимальный интервал отсутствия сигнала для измерений 40+6=46 мс при условии, что сигналы обнаружения передаются каждые 40 мс. После того, как UE обнаруживает это смещение в 30 мс между передачей сигналов обнаружения обслуживающей соты и целевых сот, оно может информировать обслуживающую соту. Альтернативно, UE сообщает информацию субкадров или SFN обслуживающей соты, когда сигнал обнаружения обнаруживается. Альтернативно, eNB может конфигурировать несколько шаблонов интервалов отсутствия сигнала для измерений, причем значение смещения может изменяться в расчете на интервал измерений. Например, может задаваться шаблон интервалов отсутствия сигнала для измерений:
[350] {measurement gap pattern=160 мс с интервалом 10 мс
[351] global_offset=0
[352] Каждые 40 мс,
[353] значение 1 смещения=10
[354] значение 2 смещения =20
[355] значение 3 смещения=30
[356] значение 4 смещения=40
[357] }
[358] - где интервал измерений должен составлять 160 мс, и каждое измерение может возникать каждые 40 мс с различными значениями смещения. В первом интервале в 40 мс, используется значение смещения в 10, так что UE начинает измерение в 40 мс+10 мс (при условии начала в 0 мс), второе значение смещения 20 используется для вторых 40 мс, так что UE начинает измерение в 80 мс+20 мс (100 мс), и т.д. При условии, что максимум неопределенно составляет 40 мс, это служит для того, чтобы разделять окно поиска в расчете на каждый эпизод измерений до тех пор, пока UE не найдет значение смещения. Когда UE обнаруживает значение смещения, новый интервал отсутствия сигнала для измерений сконфигурирован, или UE может игнорировать подзначения смещения.
[359]
[360] Поскольку также целесообразно, если некоторые соты по частоте могут передавать сигналы обнаружения, тогда как другие соты не могут передавать сигналы обнаружения, желательно знать, какие соты передают сигналы обнаружения, и в силу этого UE может использовать сигналы обнаружения для измерения и обнаружения сот. Один простой подход заключается в том, чтобы отправлять список идентификаторов сот, которые могут обнаруживаться/измеряться посредством сигналов обнаружения. Если список идентификаторов сот не известен или сконфигурирован, UE может предполагать, что все соты на частоте передают DRS, если DRS сконфигурирован для этой частоты. В этом случае, интервал отсутствия сигнала для измерений используется для межчастотной технологии, охватывающей как унаследованное, так и основанное на DRS обнаружение и измерение сот, UE может выполнять обнаружение/измерение в каждом интервале отсутствия сигнала для измерений. В том случае, если UE обнаруживает соту с идентичным идентификатором с унаследованным и с DRS-измерением, оно должно предполагать, что две соты отличаются, даже если идентификатор соты является идентичным, и сообщает оба значения (вместе с потенциально RS-типом обнаружения/измерений). Альтернативно, UE может предполагать, что идентификатор соты является идентичным, и выполняет только обнаружение/измерение на основе DRS. Если UE сконфигурировано со списком идентификаторов сот, передающих DRS, то, следует или нет обнаруживать другие соты с унаследованными сигналами, должно зависеть от реализации UE. С учетом конфигурации интервалов отсутствия сигнала для измерений, UE является свободным выполнять оба алгоритма обнаружения и сообщает их. Тем не менее, если DRS сконфигурирован для данной частоты, UE не может выполнять "обнаружение/измерение на основе унаследованных сигналов", отличных от сконфигурированных субкадров для измерения/обнаружения (например, интервала отсутствия сигнала для измерений). Это служит для того, чтобы исключать случай, в котором UE может обнаруживать унаследованные сигналы, передаваемые посредством активированного состояния соты, которая передает DRS, и выполняет измерения для соты. Если UE выполняет измерение, оно может сообщать RS-тип вместе с результатами.
[361] Как пояснено выше, настоящее описание изобретения предлагает, что если сота представляет собой неизвестную соту и сконфигурирована с DRS-конфигурацией для определенной частоты, UE может предполагать, что все соты на частоте передают DRS. Соответственно, UE может предполагать, что известная сота, к примеру, PCell UE, не передает DRS. Дополнительно, как пояснено выше, DRS может быть сконфигурирован только для определенного числа частот, UE выполняет DRS-измерение только для сконфигурированных частот и не выполняет измерение на основе унаследованных сигналов. Дополнительно, UE может выполнять измерение на основе унаследованных сигналов для несконфигурированных частот.
[362]
[363] Когда UE сконфигурировано с сообщениями с инициированием по событиям, известно, что UE может быть сконфигурировано с различными пороговыми значениями для унаследованного измерения по сравнению с измерением на основе DRS, поскольку RSSI-измерение может отличаться. Пороговые значения зависят от сети, либо в UE может предоставляться одно смещение/дельта-значение, которое используется согласно механизму RS-типа измерений или RSSI-измерений. С точки зрения вычисления RSSI, дополнительно важно использовать либо OFDM-символы, либо субкадр, которые не переносят RS обнаружения. Один пример заключается в том, чтобы использовать RSSI в CRS-OFDM-символах (№0/№4 в каждом временном кванте в обычном CP независимо от состояния целевой соты), если DRS состоит из PSS/(SSS)/CSI-RS. Другой пример заключается в том, чтобы использовать не-DRS-субкадр во всех OFDM-символах для RSSI-измерения в интервале отсутствия сигнала для измерений. Когда RSSI является чрезвычайно низким вследствие отсутствия передачи данных, вычисление RSRQ для DRS может выполняться как RSRP x N/{X RSRP N+RSSI}или аналогичным образом, с тем чтобы не создавать бесконечное значение для RSRQ.
[364]
[365] На основе настоящего описания изобретения, одни или несколько интервалов отсутствия сигнала для измерений могут быть сконфигурированы для UE. Нижеприведенные варианты осуществления в основном относятся к ситуации, когда сконфигурированы несколько интервалов отсутствия сигнала для измерений.
[366] * Обработка нескольких интервалов отсутствия сигнала для измерений
[367] Как пояснено выше, UE может быть сконфигурировано с одной конфигурацией интервалов отсутствия сигнала для измерений для измерения на основе DRS.
[368] В случае если UE сконфигурировано с интервалом отсутствия сигнала для измерений, вследствие аппаратного ограничения или eNB-конфигурации для измерения на основе DRS, интервал отсутствия сигнала для измерений может соответствовать унаследованному шаблону или новому шаблону, или нестрогому шаблону (к примеру, периодичность в 40 мс со значением дельта-смещения, причем UE может иметь возможность выполнять m раз измерения интервала отсутствия сигнала для измерений каждые 200 мс).
[369] Фиг. 16 показывает определенное число конфигураций интервалов отсутствия сигнала для измерений, предложенных посредством настоящего описания изобретения.
[370] * Как проиллюстрировано на фиг. 16, в случае если интервал отсутствия сигнала для измерений задается в расчете на унаследованный шаблон, UE может быть сконфигурировано только с одним интервалом отсутствия сигнала для измерений.
[371] * Дополнительно, в случае если интервал отсутствия сигнала для измерений задается в расчете на нестрогий шаблон, UE может быть сконфигурировано максимум с двумя интервалами отсутствия сигнала для измерений, при этом один имеет унаследованный, а другой - нестрогий шаблон. В этом случае, UE может предполагать, что нестрогий шаблон перекрывается с унаследованным шаблоном таким образом, что нестрогий шаблон представляет собой поднабор унаследованного шаблона. Альтернативно, UE может игнорировать "неперекрывающийся" интервал отсутствия сигнала для измерений (т.е. сконфигурированный для интервала отсутствия сигнала для измерений для измерения на основе DRS, но не сконфигурированный для интервала отсутствия сигнала для измерений для измерения на основе унаследованных сигналов (или унаследованного шаблона интервалов отсутствия сигнала)), UE может игнорировать эти интервалы отсутствия сигнала для измерения. Альтернативно, UE предписывается пропускать измерение в этих интервалах отсутствия сигнала для измерений, не совмещенных между ними.
[372] * В случае если интервал отсутствия сигнала для измерений задается в расчете на новый шаблон, UE может быть сконфигурировано максимум с тремя интервалами отсутствия сигнала для измерений, причем UE должно предполагать, что все три интервала отсутствия сигнала для измерений в определенной степени совмещаются. Три интервала отсутствия сигнала для измерений могут включать в себя интервал отсутствия сигнала для измерений для измерения на основе DRS, другой интервал отсутствия сигнала для менее строгого требования (в расчете на нестрогий шаблон интервалов отсутствия сигнала для измерений) и последний интервал отсутствия сигнала для унаследованного интервала отсутствия сигнала для измерений. Во-первых, UE может предполагать, что нестрогий шаблон интервалов отсутствия сигнала представляет собой поднабор шаблона унаследованного интервала отсутствия сигнала для измерений. Затем UE дополнительно может предполагать, что интервал отсутствия сигнала для измерений для измерения на основе DRS представляет собой поднабор или нестрогого интервала отсутствия сигнала для измерений или унаследованного интервала отсутствия сигнала для измерений (или их обоих). Аналогично вышеописанному случаю, UE может игнорировать "неперекрытые" интервалы отсутствия сигнала между интервалом отсутствия сигнала для измерений для измерения на основе DRS с конфигурацией нестрогих или унаследованных интервалов отсутствия сигнала для измерений, или UE не должно выполнять измерение в этих "неперекрывающихся" интервалах отсутствия сигнала. Одновременно, UE может иметь возможность запрашивать выполнение измерения для этих интервалов отсутствия сигнала, даже если они не совмещаются с другими интервалами отсутствия сигнала для измерений. Пример показан ниже.
[373] Другой возможный способ конфигурирования интервала отсутствия сигнала для измерений для DRS состоит в том, чтобы конфигурировать в качестве "кратного числа" унаследованного интервала отсутствия сигнала для измерений, к примеру, интервала отсутствия сигнала для измерений согласно унаследованному шаблону интервалов отсутствия сигнала каждые m-ые интервалы отсутствия сигнала используются для измерения на основе DRS.
[374] Кроме того, интервал отсутствия сигнала для измерения на основе DRS может иметь меньший интервал отсутствия сигнала для измерений, как показано на фиг. 16.
[375] Альтернативно, когда сконфигурировано несколько интервалов отсутствия сигнала для измерений, общая длительность интервала отсутствия сигнала для измерений может охватываться посредством шаблона 0 интервалов отсутствия сигнала (40 мс с интервалом отсутствия сигнала в 6 мс).
[376] Например, унаследованный интервал отсутствия сигнала для измерений шаблона 1 интервалов отсутствия сигнала может быть сконфигурирован для измерения на основе унаследованных сигналов, и новый интервал отсутствия сигнала для измерений шаблона 1 интервалов отсутствия сигнала может быть сконфигурирован для измерения на основе DRS. Поскольку полное время прерывания обслуживания обоих интервалов отсутствия сигнала для измерений не должно превышать шаблон 0 интервалов отсутствия сигнала, UE может выполнять измерение. Если два интервала отсутствия сигнала для измерений конфликтуют, UE может отдать высокий приоритет измерению на основе DRS, если оба не могут быть предприняты одновременно.
[377] Фиг. 17 показывает дополнительные варианты осуществления, связанные с конфигурациями интервалов отсутствия сигнала для измерений, предложенными посредством настоящего описания изобретения.
[378] Следует отметить, что могут быть другие возможные варианты, удовлетворяющие проекту 7 (UE не должно иметь большего количества времени прерывания обслуживания, чем текущий конфигурируемый интервал отсутствия сигнала для измерений), без ограничений в отношении того, что сконфигурированный шаблон интервалов отсутствия сигнала для измерений для измерения на основе DRS должен представлять собой поднабор сконфигурированного шаблона унаследованного интервала отсутствия сигнала для измерений, когда два шаблона интервалов отсутствия сигнала для измерений сконфигурированы. При предоставлении возможности независимых конфигураций шаблонов интервалов отсутствия сигнала для измерений для основанного на DRS и унаследованного измерения, может быть предусмотрено одно такое ограничение, что оба из двух сконфигурированных шаблонов интервалов отсутствия сигнала для измерений (т.е. один для измерения на основе DRS, а другой для унаследованного измерения) должны охватываться посредством одного шаблона унаследованного интервала отсутствия сигнала для измерений в таблице 8.1.2.1-1 в 3GPP TS 36.133. При этом одном ограничении, шаблон интервалов отсутствия сигнала для измерений для измерения на основе DRS может быть новым заданным, например, с меньшей MGL и/или более длительным MGRP.
[379] Другой подход для рассмотрения заключается в том, чтобы ограничивать использование шаблона 0 интервалов отсутствия сигнала, когда UE сконфигурировано больше чем с одним интервалом отсутствия сигнала для измерений. Например, если UE сконфигурировано с интервалом отсутствия сигнала для измерений для DRS и другим интервалом отсутствия сигнала для измерений для измерения на основе унаследованных сигналов, шаблон интервалов отсутствия сигнала для измерений не должен быть основан на шаблоне 0 интервалов отсутствия сигнала. Посредством этого ограничения, полное время обслуживания двух или интервалы отсутствия сигнала для измерений не может превышать интервал отсутствия сигнала для измерений шаблона 0 интервалов отсутствия сигнала (т.е. 6 мс в расчете на 40 мс). Наряду с этим, шаблон интервалов отсутствия сигнала для измерений для DRS должен иметь более длительную периодичность, чем шаблон 0 или 1 интервалов отсутствия сигнала (т.е. 40 мс или 80 мс) и/или меньшую длительность интервала отсутствия сигнала (т.е. 6 мс). Даже вследствие этого, шаблон интервалов отсутствия сигнала для нестрогого измерения должен представлять собой поднабор унаследованного шаблона интервалов отсутствия сигнала. Для этого, UE не должно ожидать конфигурирования с шаблоном 0 интервалов отсутствия сигнала, если UE сконфигурировано с шаблоном интервалов отсутствия сигнала для измерений для измерения на основе DRS и шаблоном интервалов отсутствия сигнала для измерений для унаследованного измерения. Альтернативно, UE не должно ожидать конфигурирования с шаблоном 0 интервалов отсутствия сигнала, если UE сконфигурировано с интервалом отсутствия сигнала для измерений для измерения на основе сигналов обнаружения.
[380]
[381] В дальнейшем в этом документе описываются более подробные примеры, связанные с вышеописанными признаками.
[382] UE может быть сконфигурировано с шаблоном подавления в расчете на соту или TP. В этом случае, подавление предполагается на RE-уровне.
[383] Для внутричастотной технологии, если обслуживающая сота на идентичной частоте активируется, UE не должно предполагать, что инициируется формирование сообщений с измерениями на основе CSI-RS.
[384]
[385] Как пояснено на фиг. 11, набор DRS-конфигурации может предоставляться через передачу служебных сигналов верхнего уровня в UE для передачи в служебных сигналах периода, смещения и длительности для DRS-измерения. Примеры DRS-конфигурации могут задаваться так, как показано ниже. Подробно, следующее служит для NZP CSI-RS-конфигураций. Для CSI-RS в качестве DRS, ниже предлагаются следующие конфигурации:
[386] Табл. 4
csi-RS-ConfigNZPId-r11 CSI-RS-ConfigNZPId-r11,
antennaPortsCount-r11 ENUMERATED {an1, an2, an4, an8},
resourceConfig-r11 INTEGER (0..31),
subframeConfig-r11 INTEGER (0..154),
scramblingIdentity-r11 INTEGER (0..503),
qcl-CRS-Info-r11 SEQUENCE {
qcl-ScramblingIdentity-r11 INTEGER (0..503),
crs-PortsCount-r11 ENUMERATED {n1, n2, n4, spare1},
mbsfn-SubframeConfigList-r11 CHOICE {
release NULL,
setup SEQUENCE {
subframeConfigList MBSFN-SubframeConfigList
}
} OPTIONAL -- Требуется ON
} OPTIONAL, -- Требуется OR
...
}
[387] Табл. 5
carrierFreq ARFCN-ValueEUTRA,
allowedMeasBandwidth AllowedMeasBandwidth,
presenceAntennaPort1 PresenceAntennaPort1,
neighCellConfig NeighCellConfig,
offsetFreq Q-OffsetRange DEFAULT dB0,
--Список сот
cellsToRemoveList CellIndexList OPTIONAL, -Требуется ON
cellsToAddModList CellsToAddModList OPTIONAL, - Требуется ON
--"Черный" список
blackCellsToRemoveList CellIndexList OPTIONAL, -Требуется ON
blackCellsToAddModList BlackCellsToAddModList OPTIONAL, -Требуется ON
cellForWhichToReportCGI PhysCellId OPTIONAL, -Требуется ON
...,
Dmtc_config DMTCConfiguration mandatory {40, 0 по умолчанию}
measSFPattern MeasSFPatternNeigh OPTIONAL
triggerCSI-RS RSRP Boolean {true для инициирования CSI-RS RSRP, false не для инициирования}
triggerCSI-RS RSRQ Boolean {true для инициирования CSI-RS RSRP, false е для инициирования}
DRS-CSI-RSConfigList DRS-CSI-RSConfigFormatList OPTION (может присутствовать только если триггер CSI-RS RSRP или RSRQ активен)
[[measCycleSCell-r10 MeasCycleSCell-r10 OPTIONAL, -- Требуется ON
measSubframePatternConfigNeigh-r10 MeasSubframePatternConfigNeigh-r10 OPTIONAL -- Требуется ON
]],
[[widebandRSRQ-Meas-r11 BOOLEAN OPTIONAL -- Cond WB-RSRQ
]] }
[388] Табл. 6
{
Последовательность 5-битовой битовой карты
}
[389] Табл. 7
{
Int periodity
Int offset
Int duration Option, если не указано, предполагается 5 мс
}
[390] Табл. 8
{ множество
{идентификатор соты;
множество DRS_CSI-RS-ConfigNZP-r12;
}
}
[391] Табл. 9
antennaPortsCount-r11 ENUMERATED {an1, an2, an4, an8},
resourceConfig-r11 INTEGER (0..31),
subframeConfig-r11 INTEGER (0..154),
scramblingIdentity-r11 INTEGER (0..503),
}
[392] Как показано в таблице 7, каждый набор DRS-конфигураций может включать в себя определенное число конфигурационных элементов, к примеру, "periodicity", указывающий период измерений DRS, "offset", указывающий смещение периода измерений, и "duration", указывающий период времени, в течение которого UE измеряет DRS в одном периоде для периода измерений. Дополнительно, как показано в таблице 5, каждый набор DRS-конфигураций задается на основе частоты (например, "carrierFreq").
[393]
[394] Когда UE сконфигурировано с CSI-RS-RSRP или RSRQ, инициированным без явной передачи в служебных сигналах CSI-RS-конфигураций, UE должно предполагать, что:
[395] * В течение длительности измерений или посредством MeasPatternNeighb, предположим m допустимых субкадров нисходящей линии связи, индексированных от 0 до m-1, начиная с первого DMTC-субкадра; и
[396] * Для каждого субкадра, за исключением субкадра, в котором передается SSS (и/или передается PSS), оно может предполагать, что используются 20 CSI-RS-конфигураций или предварительно фиксированный набор CSI-RS-конфигураций, и скремблирование идентифицируют каждого CSI-RS может определяться посредством функции F (индекс субкадра=относительное смещение относительно DMTC, начиная с m, индекса CSI-RS RE-конфигурации).
[397] Более конкретно, в DRS-CSI-RSConfigFormatList, это может конфигурироваться, как показано ниже.
[398] Табл. 10
{cell ID;
Boolean implicit {true if DRS_CSI-RS-ConfigNZP-r1 is not present, 0 otherwise}
The set of DRS_CSI-RS-ConfigNZP-r12; OPTIONAL only if implicit is false.
}
[399]
[400] В этом случае, дополнительный индикатор относительно субкадров, в которых передается CSI-RS, и некоторое функциональное преобразование также может быть сконфигурировано на верхнем уровне в расчете на идентификатор соты.
[401]
[402] * Применимость CSI-RS-конфигурации, когда сеть не синхронизирована
[403] По меньшей мере, для FDD, с тем чтобы улучшать характеристики мультиплексирования/ICIC, может рассматриваться субкадровый сдвиг между кластерами. В этом случае, когда задана NZP CSI-RS-конфигурация, возникает вопрос в том, как применять субкадровое смещение. Это подробное описание предлагает применять субкадровое смещение следующим образом:
[404] Табл. 11
Если субкадровое смещение равно k,
k=k% DMTC_Period;
k=(m+k)% 5;
[405]
[406] Например, субкадровое смещение равно 39, и SSS передается во втором субкадре DMTC, CSI-RS передается в первом субкадре окна конфигурации синхронизации DRS-измерений (DMTC).
[407]
[408] * Взаимосвязь между DMTC и интервалом отсутствия сигнала для измерений.
[409] Фиг. 18 показывает взаимосвязь между измерением UE для DRS и интервалом отсутствия сигнала для измерений.
[410] Когда конфигурация синхронизации DRS-измерений (DMTC) сконфигурирована для каждой частоты, для UE, выполняющего обнаружение сот на основе интервала отсутствия сигнала для измерений, необходимо дополнительно ограничивать DMTC-конфигурации таким образом, что UE может выполнять межчастотные измерения в пределах интервала отсутствия сигнала для измерений. В основном, все или поднабор DMTC-вхождения в расчете на каждую частоту должны совмещаться с поднабором шаблона интервалов отсутствия сигнала для измерений. Фиг. 18 иллюстрирует эту взаимосвязь.
[411] Когда UE сконфигурировано с несколькими DMTC, которая не может совмещаться, с точки зрения требования в UE для обнаружения соты, должно задаваться такое требование, что m*max_interval, где max_interval является максимальным значением интервала для соты, в которой UE может выполнять измерение. Например, DMTC на частоте задается в расчете на 80 мс, и интервал отсутствия сигнала для измерений задается в расчете на 40 мс с идентичным смещением, интервал измерения составляет 80 мс. С другой стороны, если DMTC не совмещается с интервалом отсутствия сигнала для измерений, и DMTC перекрывается с интервалом отсутствия сигнала для измерений в каждых 3 интервалах отсутствия сигнала для измерений, то интервал измерения для этой соты равен "3 * интервал отсутствия сигнала для измерений". Для всех частот, которые должно отслеживать UE, определяется интервал, и требование указывается посредством применения максимального интервала для частот.
[412] Чтобы не допускать этого, необходимо совмещать DMTC-длительность и интервал отсутствия сигнала для измерений. Альтернативно, DMTC может быть кратным числом интервала отсутствия сигнала для измерений, в этом случае, требование должно определяться посредством DMTC-интервала, а не интервала отсутствия сигнала для измерений. Даже в этом случае, желательно иметь идентичную DMTC-периодичность для всех частот, чтобы не создавать сложную проблему в отношении требования по измерениям. Кроме того, желательно конфигурировать смещение для DMTC и интервала отсутствия сигнала для измерений таким образом, что в интервале отсутствия сигнала для измерений, DMTC может совмещаться (если есть). Таким образом, максимальное смещение DMTC с точки зрения смещения в пределах интервала отсутствия сигнала для измерений должно составлять меньше 4 мс, обеспечивая возможность, по меньшей мере, одного субкадра для измерения. С учетом того, что TDD также может быть сконфигурирован, перекрытие должно иметь возможность включать в себя субкадр №0 и/или субкадр №1 (или №5/№6).
[413]
[414] * Применение DRS-CSI-RS-измерения и характеристик UE
[415] Можно предполагать, что DRS-CSI-RS используется только для TP-идентификации, что также может расширяться на другие случаи. Другими словами, измерение на основе DRS-CRS является достаточным для идентификации и измерения сот. В этом случае, с точки зрения характеристик UE, характеристики формирования сообщений или измерение на основе CSI-RS могут быть отдельными характеристиками UE относительно характеристик измерений на основе DRS. Другими словами, UE может сообщать две различных характеристики: одну для характеристик измерения на основе DRS-CRS, и другую для характеристик измерения на основе DRS-CSI-RS. Альтернативно, характеристики UE также могут быть ассоциированы с характеристиками CoMP. Например, когда UE поддерживает режим 10 передачи (или улучшенные TM для того, чтобы поддерживать работу в режиме CoMP), и UE поддерживает измерения на основе DRS, это подразумевает, что UE может поддерживать измерения на основе DRS-CSI-RS. В этом смысле, если UE не поддерживает режим 10 передачи (TM10), не очень целесообразно конфигурировать измерения на основе DRS-CSI-RS. Таким образом, UE может предполагать, что измерение на основе DRS-CSI-RS может быть сконфигурировано, только если оно поддерживает TM10. В противном случае, конфигурация может игнорироваться посредством UE. Более конкретно, характеристики TM10 передаются в служебных сигналах в расчете на полосу частот и/или комбинацию полос частот. Таким образом, для частоты, сконфигурированной посредством DMTC, UE может предполагать, что DRS-CSI-RS может быть сконфигурирован только в том случае, если UE поддерживает TM10 (или улучшенные TM для того, чтобы поддерживать работу в режиме CoMP или работу в режиме совместно используемого идентификатора соты) на этой частоте или полосе частот, которой принадлежит частота. Поскольку эта RSRP на основе CSI-RS требует определенной нагрузки по обработке в UE, желательно минимизировать число частот, для которых могут быть сконфигурированы измерения на основе DRS-CSI-RS. Это подробное описание предлагает, чтобы UE могло быть сконфигурировано максимум с m частот, в которых может выполняться измерение на основе DRS-CSI-RS. Например, m может задаваться фиксированно равным 1 либо также может быть передаваться в служебных сигналах посредством характеристик UE. Например, UE может сообщать максимальное число частот, в которых UE может выполнять RSRP на основе DRS-CSI-RS таким образом, что сеть может конфигурировать частоты DRS-измерения на основе CSI-RS, соответственно. Когда UE не передает в служебных сигналах характеристики, сеть может предполагать, что полоса частот, в которой поддерживается TM10, также может также быть сконфигурирована для измерений на основе DRS-CSI-RS. Кроме того, число TP/сот, в которых выполняет поиск DRS-CSI-RS по частоте, также может быть сконфигурировано для UE в DMTC-конфигурации. Например, UE может быть сконфигурировано с числом желательных TP/сот для выполнения поиска по частоте, что может ограничивать нагрузку по обработке UE, поскольку UE не должно выполнять поиск во всех TP/сотах в этой частоте. Число сообщенных TP/сот на основе DRS-CSI-RS также может указываться в технических требованиях в качестве требования UE.
[416]
[417] Между тем, в дополнение к вышеприведенным примерам, связанным с интервалом DRS-измерения, если UE сконфигурировано с CSI-RS, предполагается, что DMTC-интервал составляет 40 мс или 80 мс. Считается, что интервал в 160 мс не сконфигурирован с CSI-RS. Альтернативно, может добавляться ZP CSI-RS-конфигурация в 160 мс. Когда UE сконфигурировано с DRS в 160 мс с CSI-RS, UE может предполагать, что ZP CSI-RS-конфигурации, сконфигурированные для согласования скорости передачи данных для DRS-измерения, являются применимыми только в DMTC-длительностях.
[418]
[419] Фиг. 19 показывает блок-схему, которая кратко описывает систему беспроводной связи, включающую в себя UE 1900 и BS или соту 2000. UE 1900 и BS 2000 могут работать на основе описания, как пояснено выше. В свете нисходящей линии связи, передающее устройство может быть частью BS 2000, и приемное устройство может быть частью UE 1900. В свете восходящей линии связи, передающее устройство может быть частью UE 1900, и приемное устройство может быть частью BS 2000.
[420] Ссылаясь на фиг. 19, UE 1900 может включать в себя процессор 1910, запоминающее устройство 1920 и радиочастотный (RF) модуль 1930.
[421] Процессор 1910 может быть выполнен с возможностью реализовывать предложенные процедуры и/или способы, описанные в данной заявке. Например, процессор 1910 может быть функционально соединен с RF-модулем 1930, при этом процессор 1910 выполнен с возможностью передачи сигналов через RF-модуль 1920 на основе диспетчеризации для UL и/или DL. Процессор 1910 может выполнять одну передачу сигнала в восходящей линии связи и один прием сигнала в нисходящей линии связи в одном субкадре через RF-модуль 1930.
[422] Запоминающее устройство 1920 соединяется с процессором 1910 и сохраняет различную информацию для того, чтобы управлять процессором 1910, которая включает в себя информацию в виде данных и/или управляющую информацию. RF-модуль 1930 также соединяется с процессором 1910.
[423] Подробные операции UE 1900 являются идентичными операциям, описанным выше.
[424] BS 2000 может включать в себя процессор 2010, запоминающее устройство 2020 и RF-модуль 2030. Здесь, BS может представлять собой PCell или SCell, и BS может представлять собой макросоту или небольшую соту. Процессор 2010 может быть выполнен с возможностью реализовывать предложенные процедуры и/или способы, описанные в данной заявке. Например, процессор 2010 может диспетчеризовать UL и/или DL.
[425] Запоминающее устройство 2020 соединяется с процессором 2010 и сохраняет различную информацию для того, чтобы управлять процессором 2010, которая включает в себя информацию в виде данных и/или управляющую информацию. RF-модуль 2030 также соединяется с процессором 2010. RF-модуль 2030 может передавать и/или принимать радиосигнал.
[426] Подробные операции BS 2000 являются идентичными операциям, описанным выше.
[427] UE 1900 и/или BS 2000 могут иметь одну антенну или несколько антенн. Система беспроводной связи может называться "системой со многими входами и многими выходами (MIMO)", когда, по меньшей мере, одно из UE 1900 и BS 2000 имеет несколько антенн.
[428] Как пояснено, UE 1900 на фиг. 19 выполняет вышеописанные технические признаки. Подробно, UE может принимать конфигурацию измерений для сигнала обнаружения (например, DRS). Возможные DRS-варианты могут включать в себя CRS, PSS и SSS. Дополнительно, в зависимости от конфигурации CSI-RS, DRS дополнительно может включать в себя CSI-RS. Предпочтительно, конфигурация измерений включает в себя, по меньшей мере, один набор конфигурационных элементов, и каждый набор конфигурационных элементов задается в расчете на частоту соответствующей соты. Дополнительно, каждый набор конфигурационных элементов указывает период измерений сигнала обнаружения, смещение периода измерений и длительность измерений.
[429] UE 1900 на фиг. 19 выполняет измерение для сигналов обнаружения на основе периода измерений сигнала обнаружения, смещения периода измерений и длительности измерений. Дополнительно, измерение UE для сигнала обнаружения выполняется только для TDD-субкадра нисходящей линии связи, выделяемого посредством SIB, когда улучшенное уменьшение помех и адаптация трафика (eIMTA) используется для UE. В современном уровне техники, CRS-измерение выполняется в каждом субкадре без обращения к информации относительно периодичности/интервала CRS. Кроме того, PSS/SSS-измерение выполняется без обращения к информации относительно периодичности/интервала PSS/SSS. Тем не менее, чтобы поддерживать связь с небольшими сотами, которая поддерживает операции включения/выключения питания, настоящее описание изобретения дополнительно предлагает DRS-конфигурации, каждая из которых задается для определенной частоты. Соответственно, настоящие варианты осуществления являются отличительными по сравнению с современным уровнем техники. Дополнительно, современный уровень техники не предоставляет прояснение или решение, когда eIMTA используется для UE, которое поддерживает DRS-измерение. По меньшей мере, по этой причине, настоящие варианты осуществления являются отличительными от современного уровня техники, являются отличительными по сравнению с современным уровнем техники.
[430] В вышеуказанных примерных системах, хотя способы описаны на основе блок-схем последовательности операций способа с использованием последовательности этапов или блоков, настоящее описание изобретения не ограничено последовательностью этапов, и некоторые этапы могут выполняться в отличных последовательностях от оставшихся этапов либо могут выполняться одновременно с оставшимися этапами. Кроме того, вышеописанные варианты осуществления включают в себя различные аспекты примеров. Соответственно, настоящее описание изобретения должно быть истолковано как включающее в себя в себя все другие поправки, модификации и изменения, которые попадают в пределы объема формулы изобретения.
[431] В описании относительно настоящего описания изобретения, когда считается, что один элемент "соединен" или "связан" с другим элементом, один элемент может непосредственно соединяться или связываться с другим элементом, но следует понимать, что третий элемент может существовать между этими двумя элементами. Напротив, когда считается, что один элемент "непосредственно соединен" или "непосредственно связан" с другим элементом, следует понимать, что третий элемент не существует между этими двумя элементами.
[432]
[433]
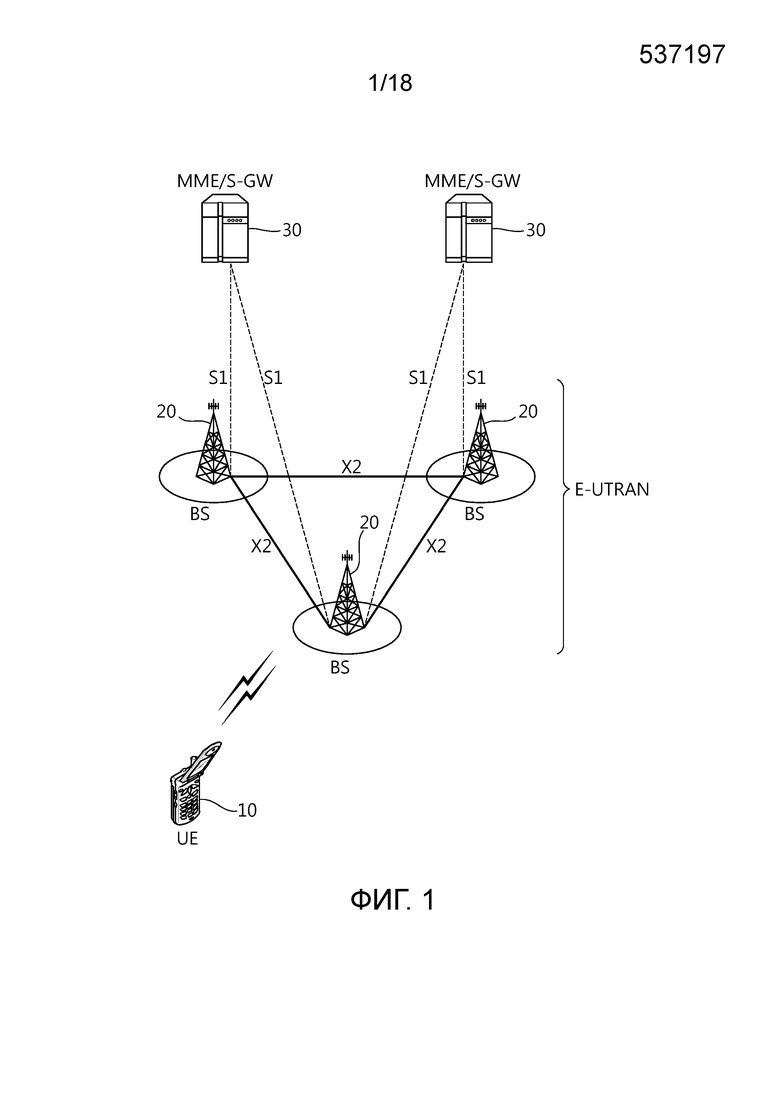
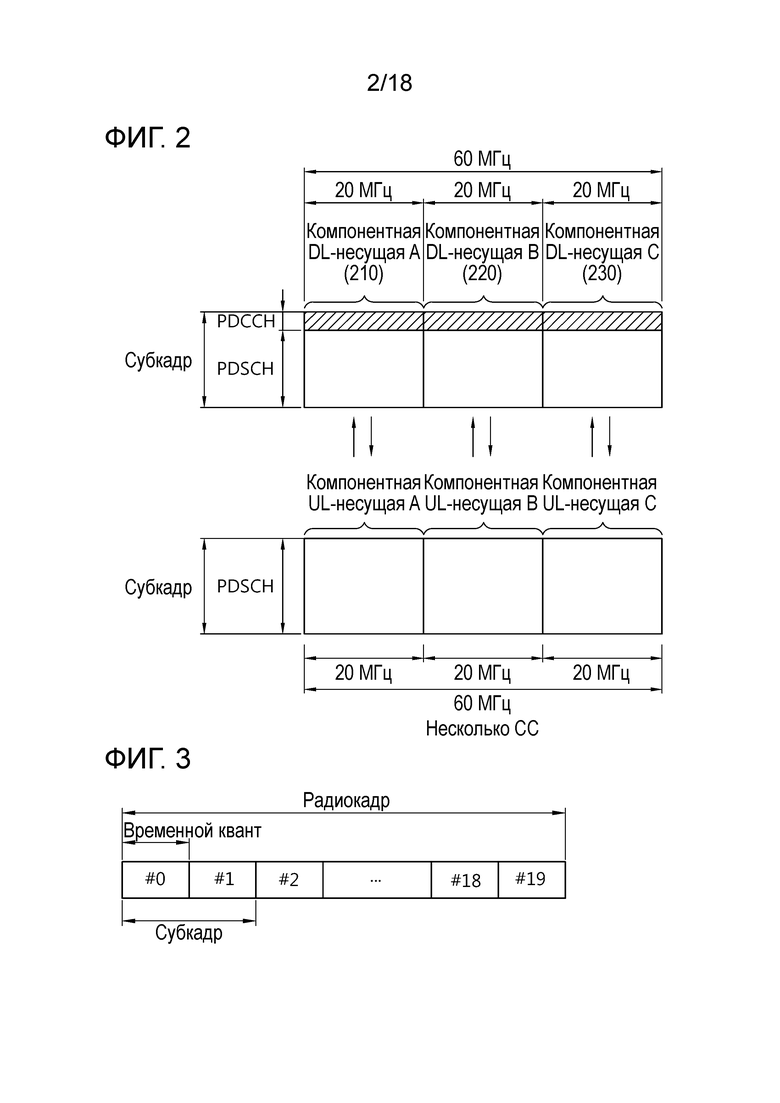
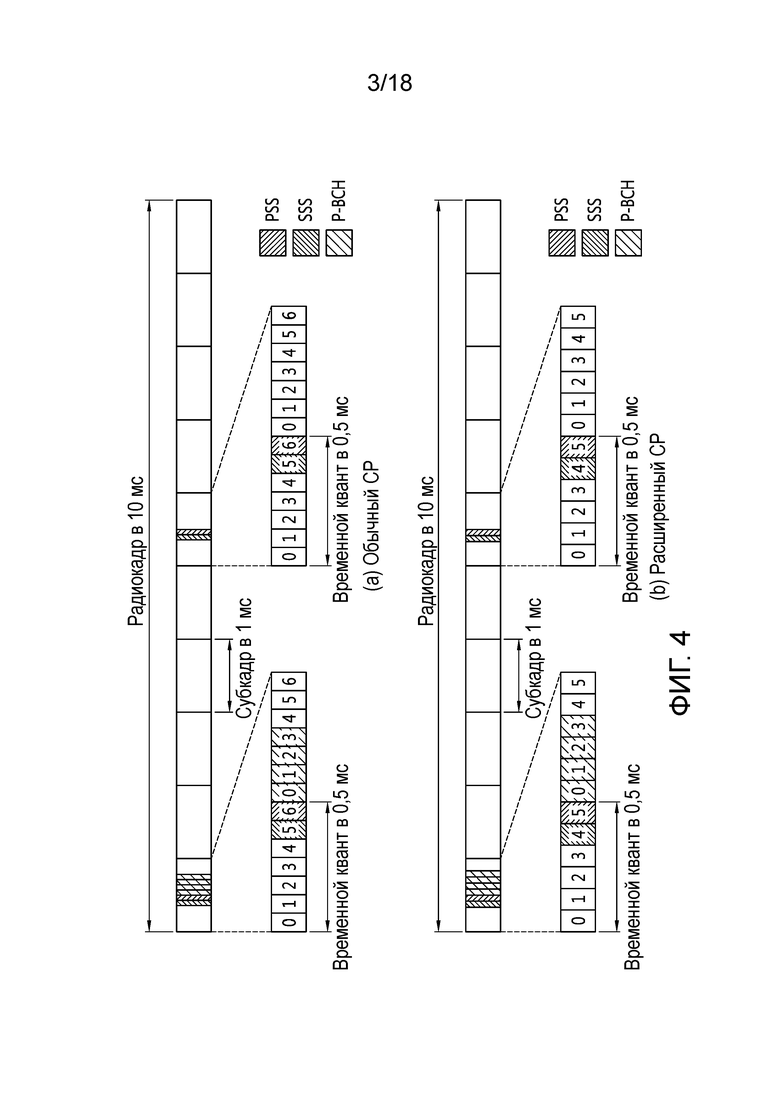
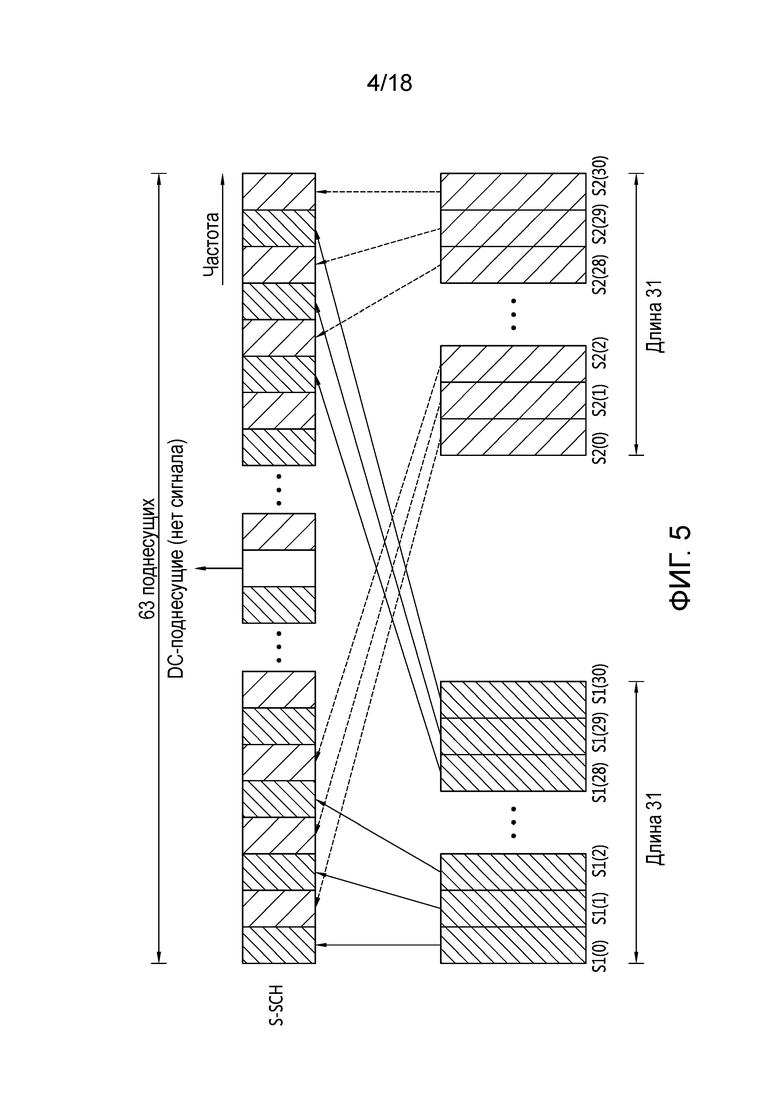
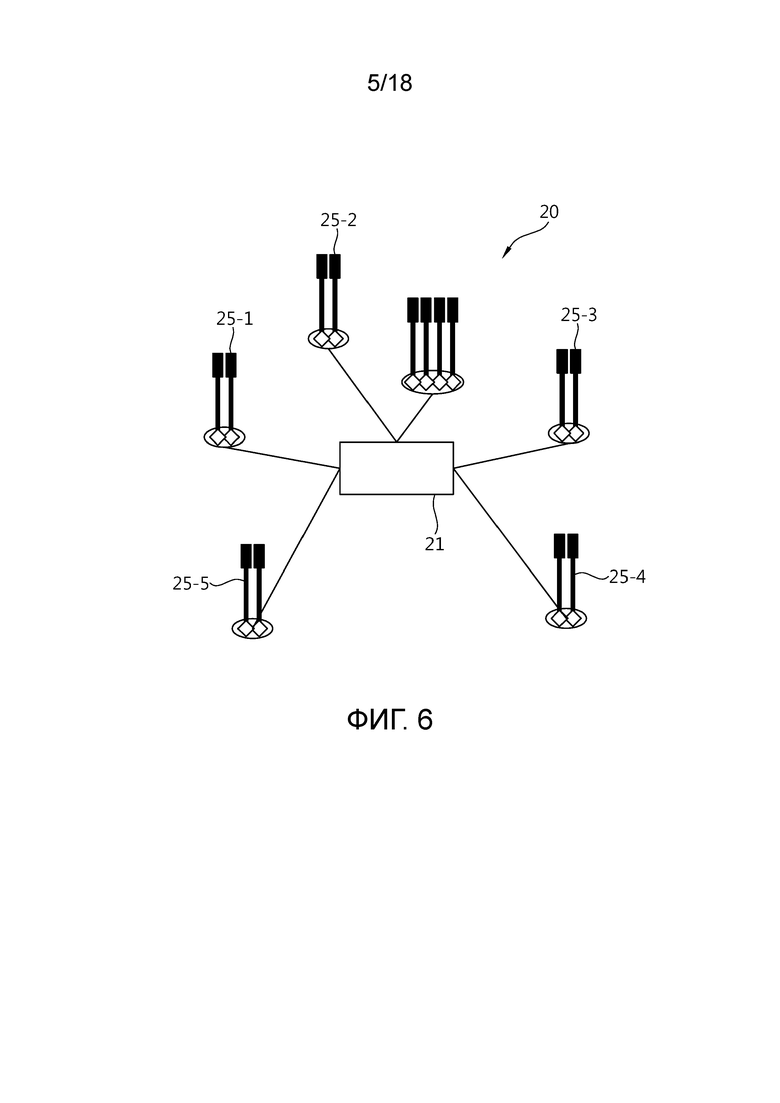
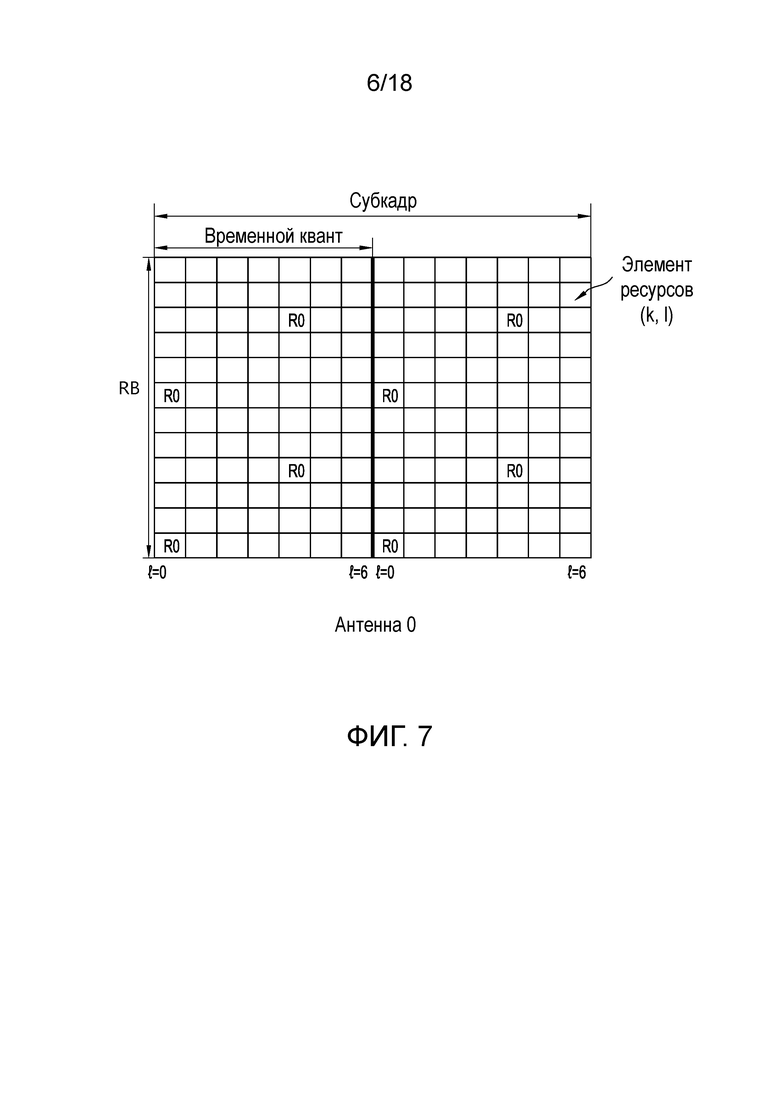
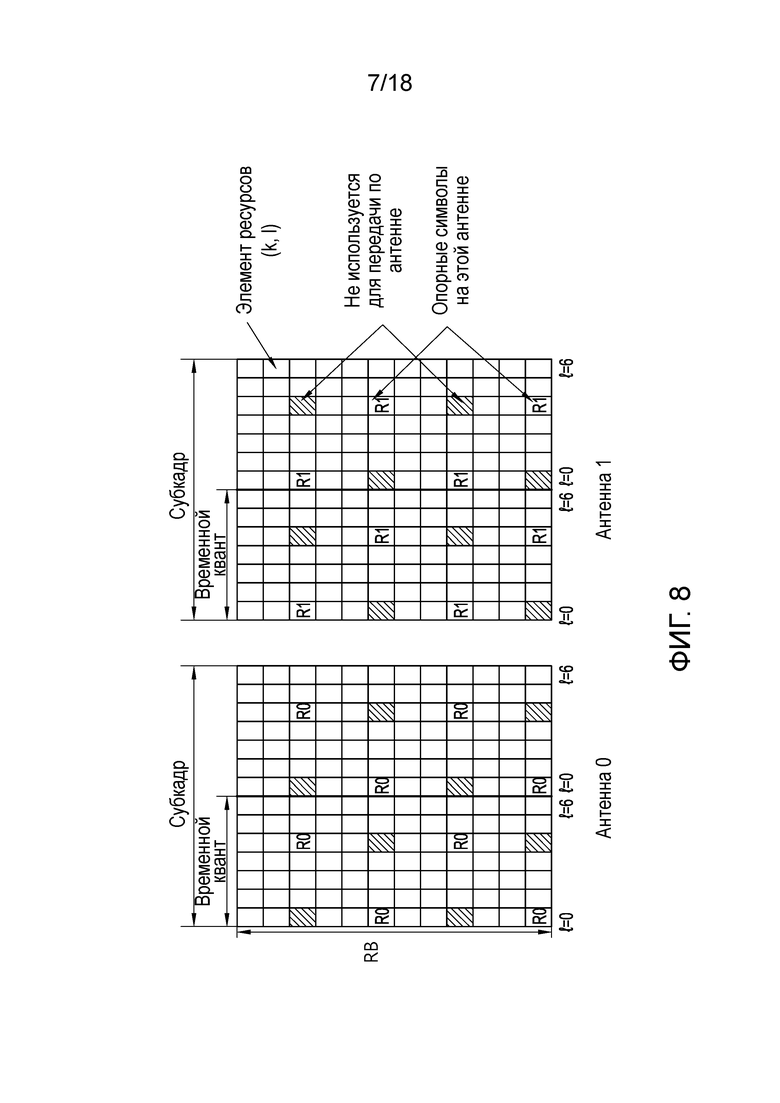
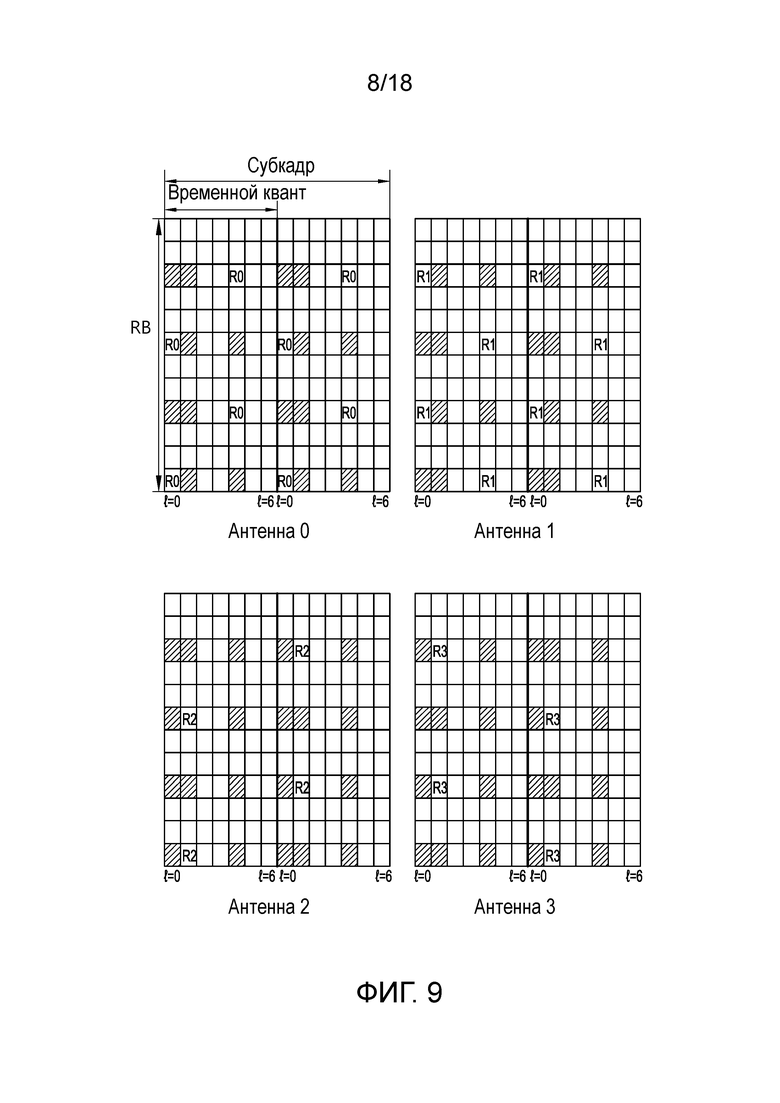
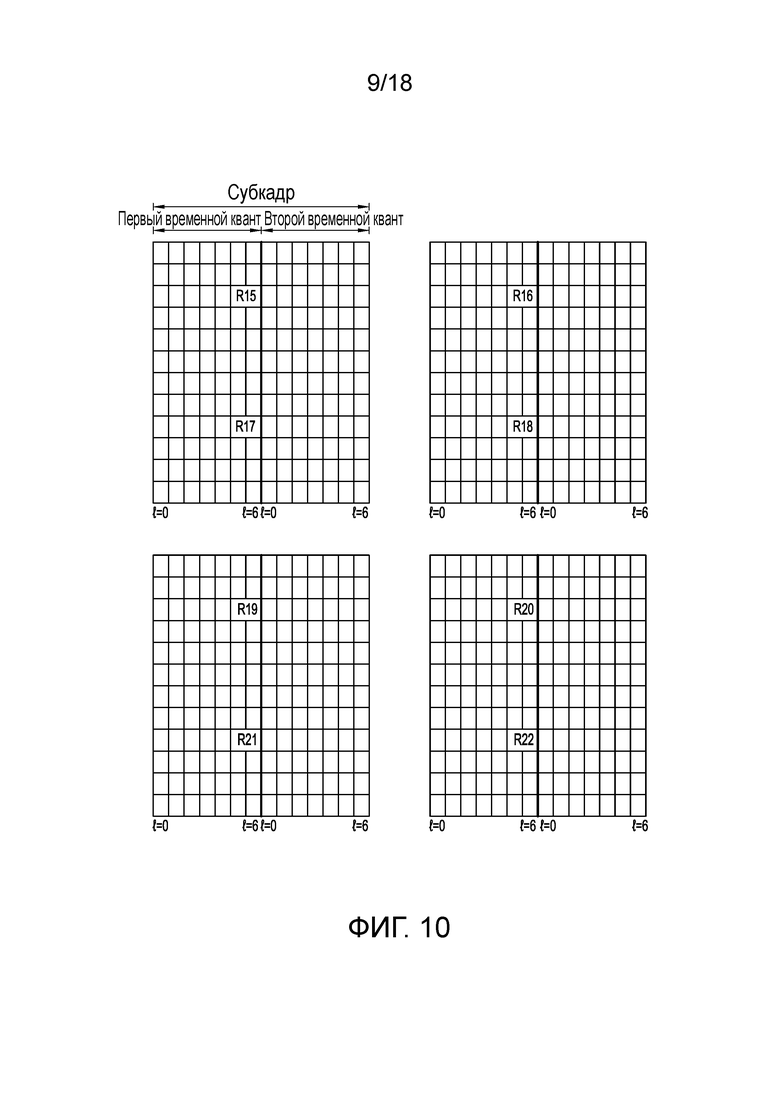
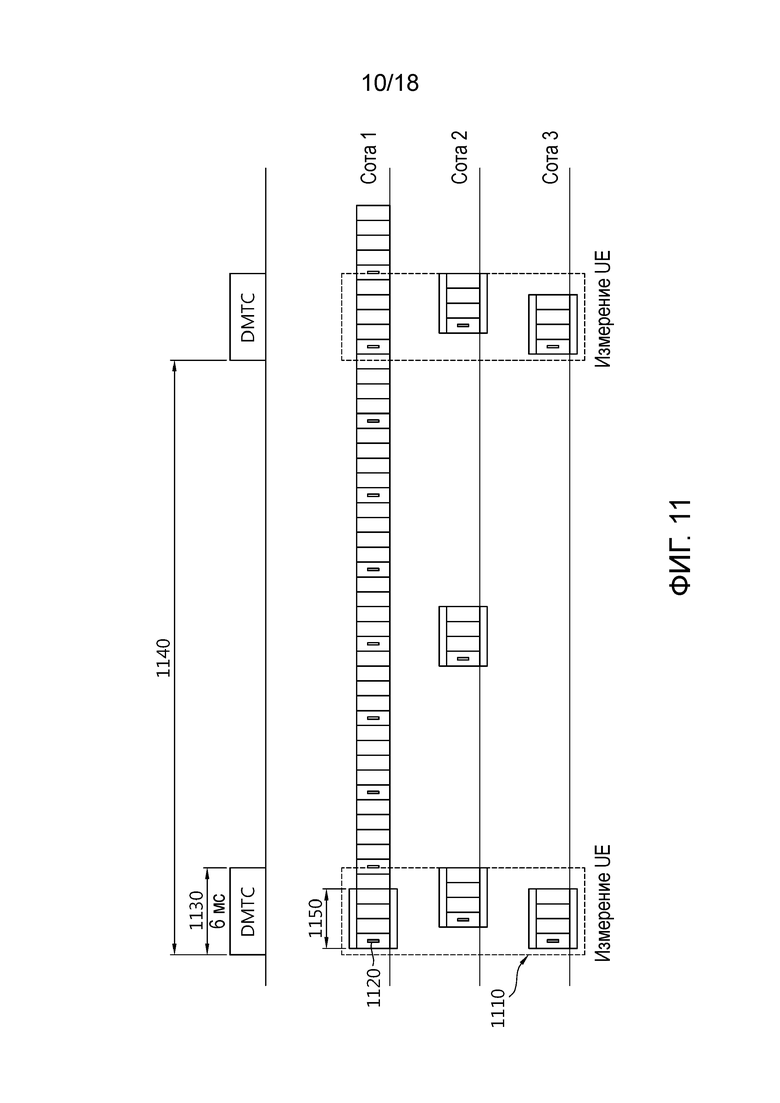
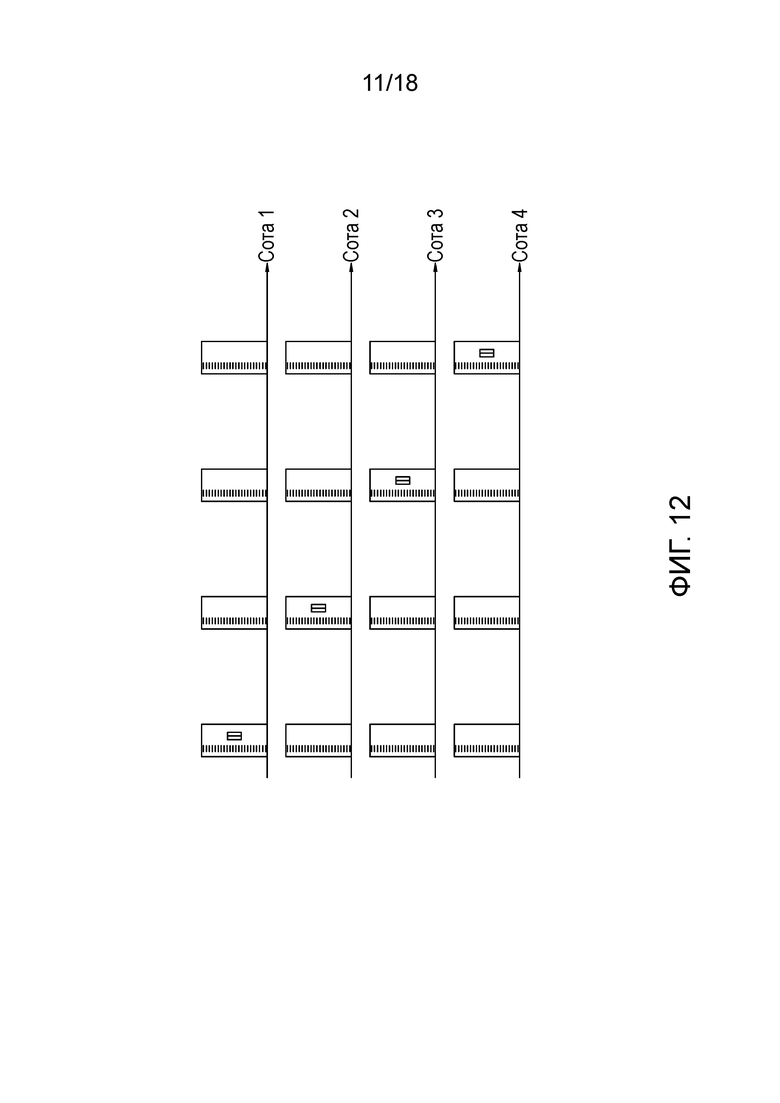
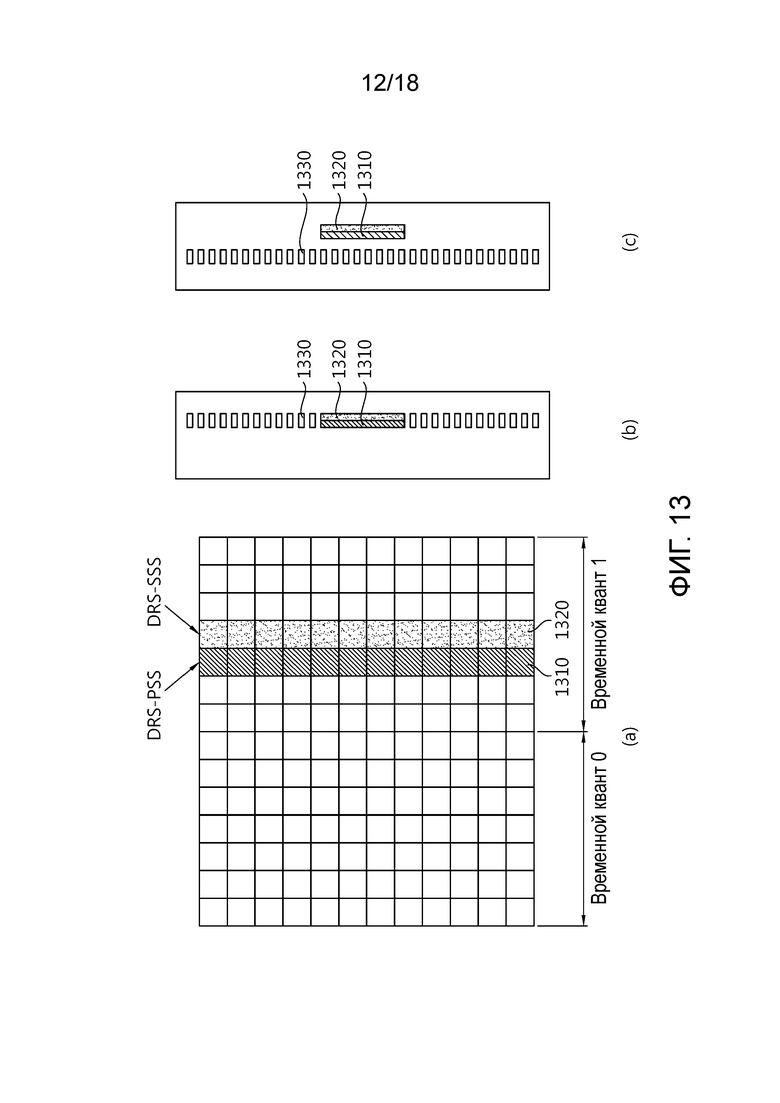
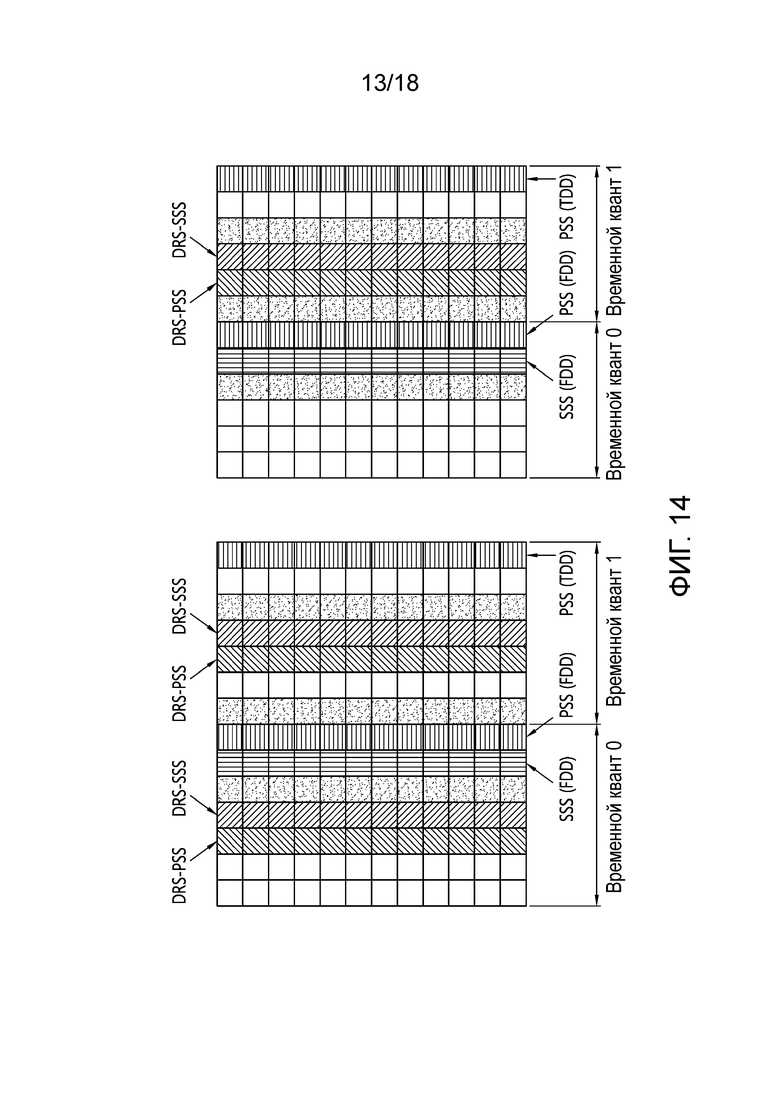
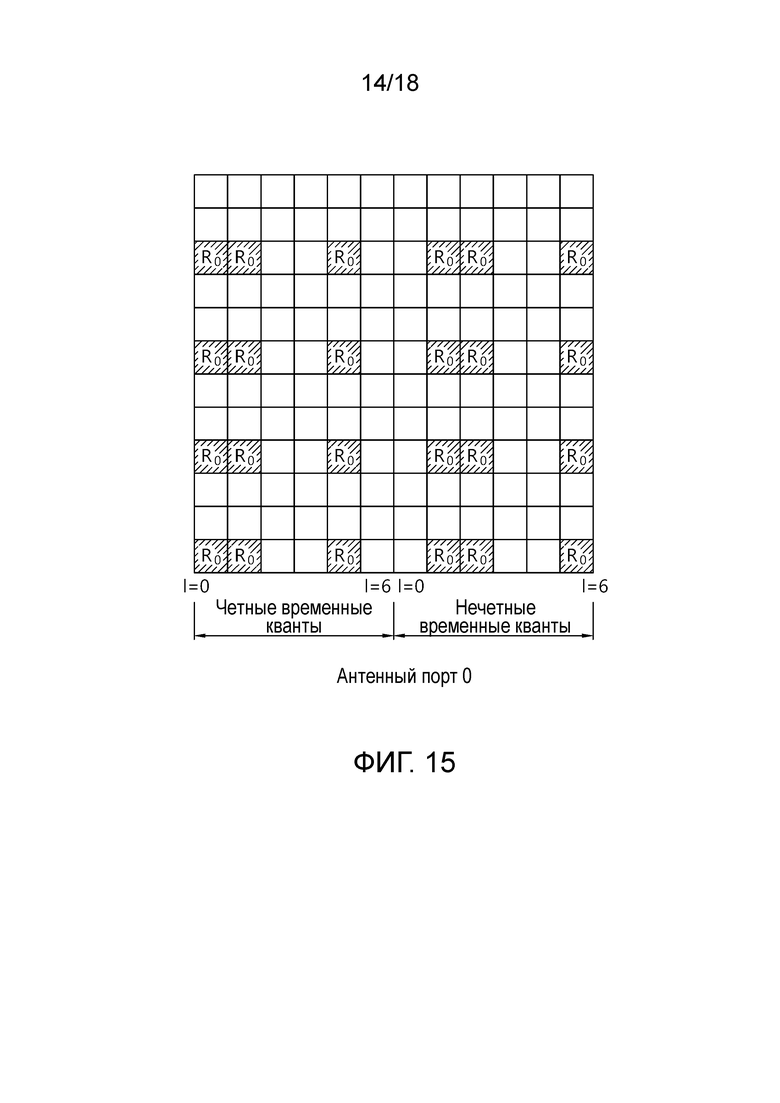
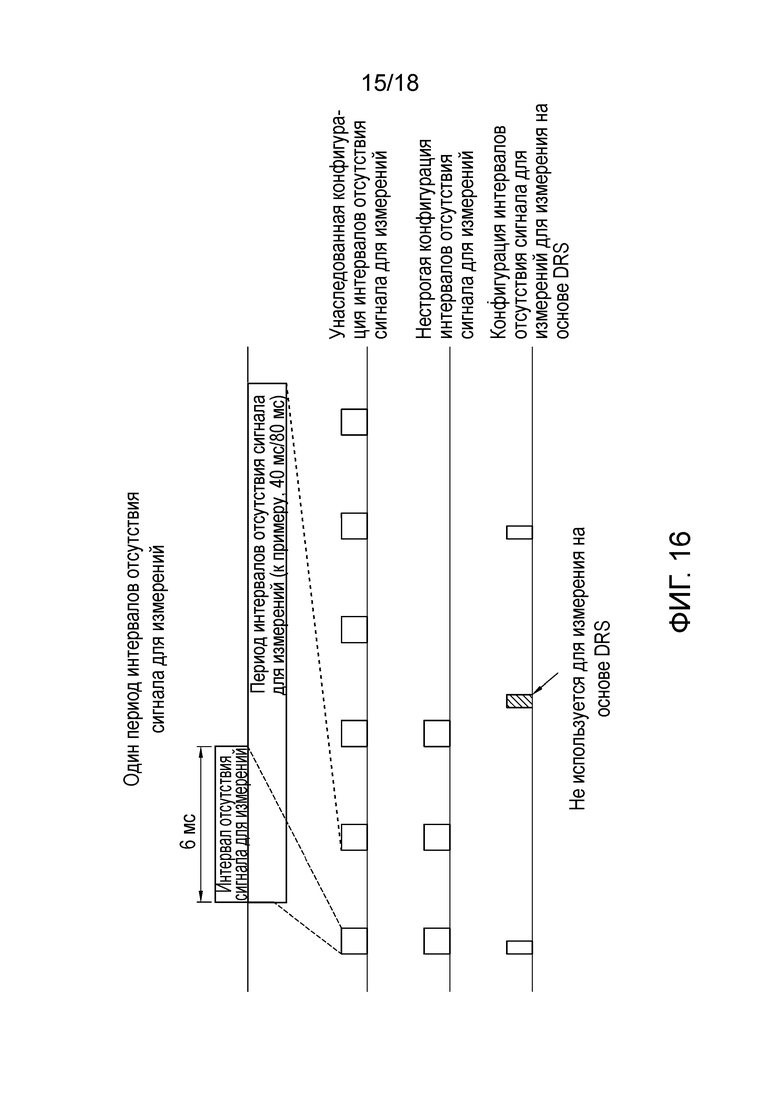
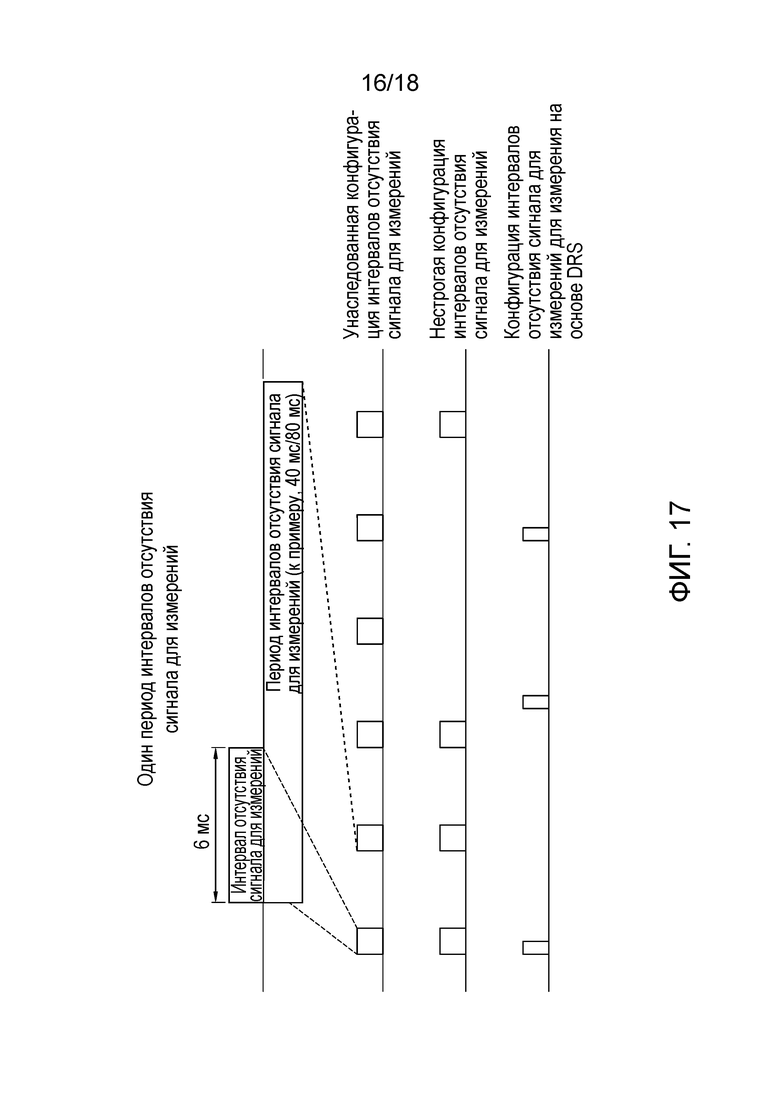
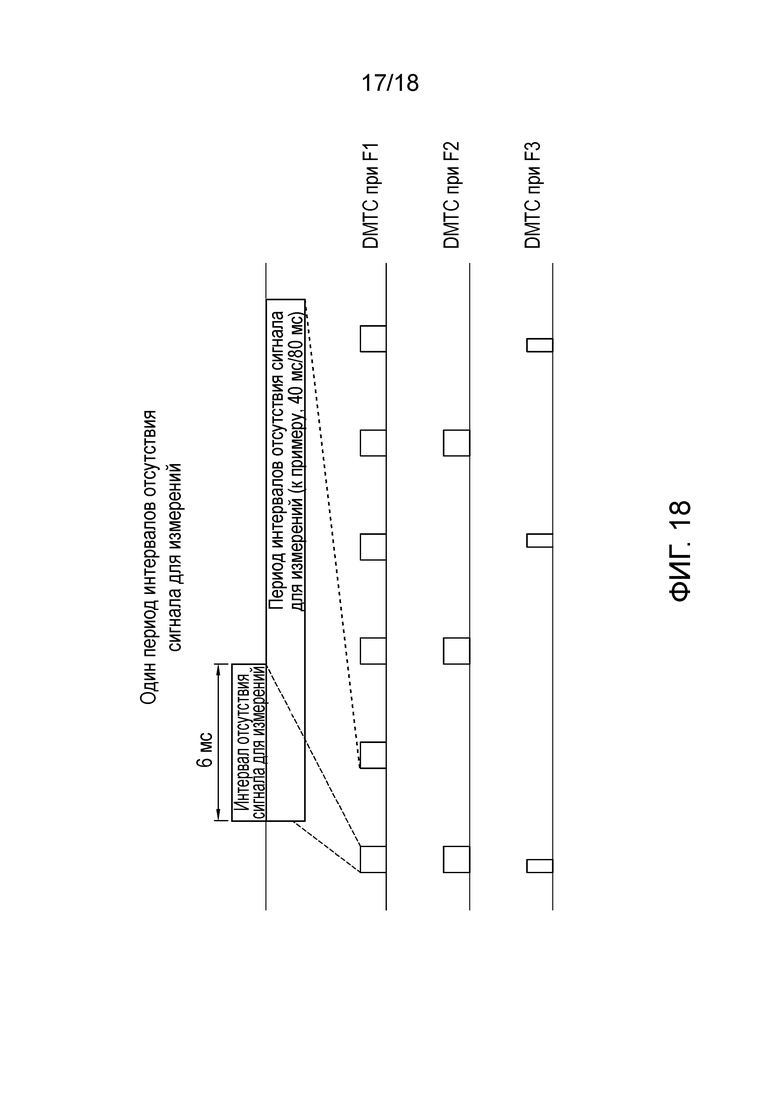
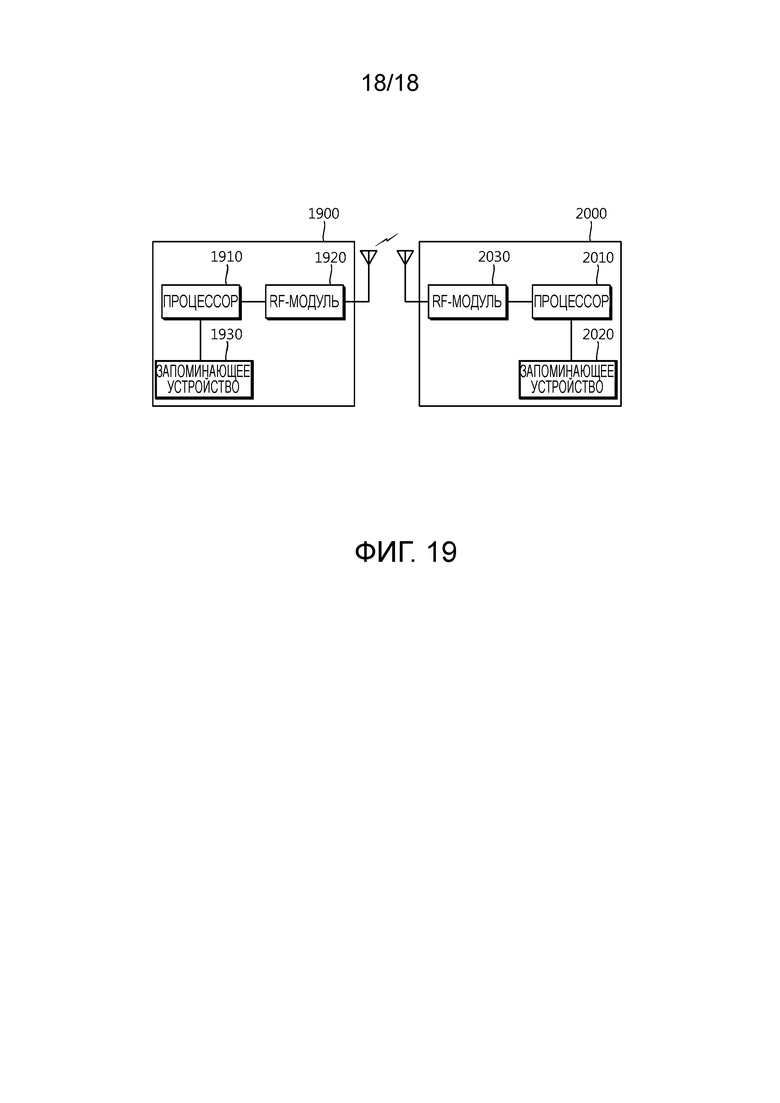
Изобретение относится к технике связи и может использоваться для приема конфигурации, применимой для обнаружения, которое может использоваться в сценарии небольших сот. Технический результат состоит в повышении точности приема информации. Для этого UE выполнено с возможностью приема конфигурации измерений для сигнала обнаружения, при этом сигнал обнаружения включает в себя CRS, PSS и SSS. Обнаружение дополнительно может включать в себя опорный сигнал информации состояния канала (CSI-RS) в зависимости от конфигурации CSI-RS. Конфигурация измерений может включать в себя, по меньшей мере, один набор конфигурационных элементов. UE выполняет измерение для сигналов обнаружения на основе принимаемой конфигурации. Дополнительно UE принимает конфигурацию опорных сигналов информации состояния канала (CSI-RS), включающую в себя, по меньшей мере, один набор конфигурационных CSI-RS-элементов, используемых для CSI-RS с нулевой мощностью, при этом CSI-RS-конфигурация включает в себя, по меньшей мере, один набор конфигурационных CSI-RS-элементов, каждый набор конфигурационных CSI-RS-элементов включает в себя информацию CSI-RS-интервала и информацию CSI-RS-смещения. 2 н. и 12 з.п. ф-лы, 19 ил., 11 табл.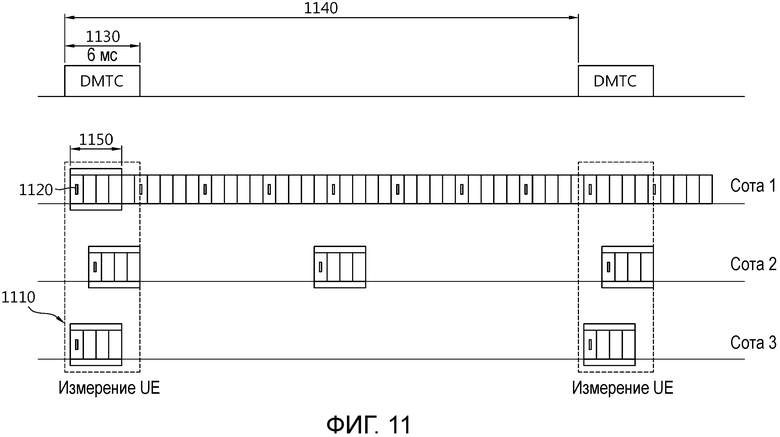
1. Способ приема управляющей информации для приема сигнала в системе беспроводной связи, причем способ осуществляется посредством абонентского устройства (UE) и содержит этапы, на которых:
принимают конфигурацию измерений для сигнала обнаружения, при этом сигнал обнаружения включает в себя конкретный для соты опорный сигнал (CRS), сигнал первичной синхронизации (PSS), сигнал вторичной синхронизации (SSS),
при этом конфигурация измерений включает в себя, по меньшей мере, один набор конфигурационных элементов, каждый набор конфигурационных элементов указывает период измерений сигнала обнаружения, смещение периода измерений и длительность измерений, в течение которой UE измеряет сигнал обнаружения в одном периоде для периода измерений; и
при этом период измерений сигнала обнаружения задается как 40 мс или 80 мс,
причем смещение периода измерений находится в ряде субкадров,
причем длительность измерений задается как 6 мс, и
при этом каждый набор конфигурационных элементов задается для частоты соответствующей соты, и
выполняют измерение для сигналов обнаружения на основе конфигурации измерений.
2. Способ по п. 1, в котором, когда улучшенное уменьшение помех и адаптация трафика (eIMTA) используется в UE, UE предполагает принимать опорный сигнал нисходящей линии связи по субкадру нисходящей линии связи, выделяемому посредством блока системной информации (SIB).
3. Способ по п. 1, в котором сигнал обнаружения дополнительно включает в себя опорный сигнал информации состояния канала (CSI-RS) в зависимости от конфигурации CSI-RS, при этом конфигурация CSI-RS включает в себя интервал CSI-RS и смещение CSI-RS, при этом UE дополнительно принимает конфигурацию опорных сигналов информации состояния канала (CSI-RS), включающую в себя, по меньшей мере, один набор конфигурационных CSI-RS-элементов, используемых для CSI-RS с нулевой мощностью, при этом CSI-RS-конфигурация включает в себя, по меньшей мере, один набор конфигурационных CSI-RS-элементов, каждый набор конфигурационных CSI-RS-элементов включает в себя информацию CSI-RS-интервала и информацию CSI-RS-смещения.
4. Способ по п. 3, в котором, когда, по меньшей мере, один набор конфигурационных CSI-RS-элементов включает в себя множественный набор конфигурационных CSR-RS-элементов, каждый набор конфигурационных CSI-RS-элементов включает в себя информацию CSI-RS-интервала и информацию CSI-RS-смещения и каждый набор конфигурационных CSI-RS-элементов отдельно сконфигурирован.
5. Способ по п. 1, дополнительно содержащий этап, на котором:
принимают конфигурацию интервалов отсутствия сигнала для измерений, указывающую длину и период повторения интервала отсутствия сигнала для измерений.
6. Способ по п. 1, в котором конфигурация измерений для сигнала обнаружения принимается через сообщение по протоколу управления радиоресурсами (RRC).
7. Способ по п. 6, в котором RRC-сообщение принимается в UE, которое находится в режиме RRC-соединения.
8. Способ по п. 1, в котором измерение для сигнала обнаружения начинается в первом субкадре, переносящем SSS в одном периоде для периода измерений.
9. Способ по п. 1, в котором набор конфигурационных элементов, заданных для одной частоты, содержит один период измерений, одно смещение и одну длительность измерений.
10. Способ по п. 1, в котором каждый набор конфигурационных элементов применяется ко множеству сот, имеющих идентичную частоту.
11. Способ по п. 1, в котором номер системного кадра (SFN) макросоты UE используется в качестве опорного в течение длительности, когда UE выполняет измерение для сигнала обнаружения.
12. Способ по п. 11, в котором макросота UE представляет собой первичную соту (PCell) UE.
13. Способ по п. 1, в котором UE не выполняет измерение для сигнала обнаружения в субкадре, сконфигурированном для услуги широковещательной и многоадресной передачи мультимедиа (MBMS).
14. Абонентское устройство (UE) для приема управляющей информации для приема сигнала в системе беспроводной связи, содержащее:
радиочастотный (RF) модуль, выполненный с возможностью приема сигнала; и
процессор, соединенный с RF-модулем и выполненный с возможностью:
принимать конфигурацию измерений для сигнала обнаружения, при этом сигнал обнаружения включает в себя конкретный для соты опорный сигнал (CRS), сигнал первичной синхронизации (PSS), сигнал вторичной синхронизации (SSS),
при этом конфигурация измерений включает в себя, по меньшей мере, один набор конфигурационных элементов, каждый набор конфигурационных элементов указывает период измерений сигнала обнаружения, смещение периода измерений и длительность измерений, в течение которой UE измеряет сигнал обнаружения в одном периоде для периода измерений;
при этом период измерений сигнала обнаружения задается как 40 мс или 80 мс,
причем смещение периода измерений находится в ряде субкадров,
причем длительность измерений задается как 6 мс, и
при этом каждый набор конфигурационных элементов задается для частоты соответствующей соты, и
выполнять измерение для сигналов обнаружения на основе конфигурации измерений.
| WO 2012057571 A1, 03.05.2012 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ВОСХОДЯЩЕГО СИГНАЛА, СОДЕРЖАЩЕГО ДАННЫЕ И УПРАВЛЯЮЩУЮ ИНФОРМАЦИЮ, ПО ВОСХОДЯЩЕМУ КАНАЛУ | 2009 |
|
RU2462815C2 |
| WO 2014008665 A1, 16.01.2014. | |||

