Изобретение относится к электромагнитному приводу электрического выключателя.
Такой привод известен, например, из ЕР 0321664. Он содержит подвижный якорь, который может совершать вдоль заданного направления перемещения возвратно-поступательное движение и соединяться с подвижным коммутирующим контактом выключателя. Кроме того, привод содержит постоянный магнит, который вырабатывает магнитное поле и удерживающее усилие для удержания якоря в заданном положении. Катушка расположена таким образом, что за счет протекания тока привод может срабатывать, а якорь - перемещаться.
В основе изобретения лежит задача создания привода, который обеспечивал бы последующие регулировку компонентов и корректировку производственных допусков.
Согласно изобретению, эта задача решается посредством выключателя с признаками п. 1 формулы. Предпочтительные варианты выполнения выключателя приведены в зависимых пунктах.
Согласно изобретению, предложен электромагнитный привод электрического выключателя, в частности электрического силового выключателя, содержащий по меньшей мере один подвижный якорь, выполненный с возможностью совершения вдоль заданного направления перемещения возвратно-поступательного движения, соединения опосредованно или непосредственно с подвижным коммутирующим контактом выключателя и в замкнутом положении замыкания магнитного контура привода на первой упорной поверхности якоря с первым магнитопроводящим ярмом привода и на второй упорной поверхности якоря с первым магнитопроводящим ярмом привода, по меньшей мере один постоянный магнит, выполненный с возможностью вырабатывания магнитного поля для магнитного контура и удерживающей силы для удержания якоря в замкнутом положении, и по меньшей мере одну катушку, расположенную с возможностью вырабатывания за счет протекания тока через нее магнитного потока, попутного или встречного магнитному потоку постоянного магнита в магнитном контуре, причем после сборки электромагнитный привод обеспечивает состояние подрегулирования за счет того, что благодаря магнитной силе постоянного магнита возможно саморегулирование положений первого и второго ярма по отношению друг к другу, и причем оба ярма могут быть приведены в жестко собранное положение, в котором ориентация ярм является фиксированной независимо от дальнейшего позиционирования якоря.
Существенное преимущество предложенного привода заключается в том, что за счет возможности последующего саморегулирования он может быть очень малыми затратами собран также с изготовленными с относительно большими производственными допусками компонентами, поскольку после сборки привод за счет предложенного, согласно изобретению, магнитного саморегулирования может быть впоследствии отрегулирован в отношении расположения первого и второго ярм. При этом подрегулирование происходит за счет магнитной силы постоянного магнита автоматически таким образом, что оба ярма ориентируются по отношению друг к другу на оптимальном расстоянии.
По меньшей мере один постоянный магнит расположен преимущественно таким образом, что он примыкает по меньшей мере к одному из ярм привода.
Особенно просто и, тем самым, предпочтительно автоматическое подрегулирование возможно тогда, когда в состоянии подрегулирования магнитный контур замкнут якорем, а, по меньшей мере, два ярма привода перемещаются по отношению друг к другу вдоль направления перемещения якоря, так что за счет приведения в действие посредством магнитной силы постоянного магнита упорная поверхность первого ярма с саморегулированием располагается от упорной поверхности второго ярма на расстоянии, которое соответствует расстоянию между первой и второй упорными поверхностями якоря вдоль заданного направления перемещения.
Преимущественно по меньшей мере два ярма, перемещающиеся по отношению друг к другу вдоль направления перемещения якоря, свинчены между собой, причем винт вставлен в отверстие в одном ярме и свинчен с другим ярмом. Диаметр отверстия вдоль направления перемещения якоря преимущественно больше диаметра винта. При ослабленном резьбовом соединении и в замкнутом положении якоря ярма в этом варианте находятся в состоянии подрегулирования и могут перемещаться по отношению друг к другу вдоль направления перемещения якоря; при жестко затянутом резьбовом соединении, напротив, ярма находятся в жестко собранном состоянии.
Диаметр отверстия вдоль направления перемещения якоря преимущественно по меньшей мере на 10% больше диаметра винта. Отверстие может представлять собой, например, паз, продольное направление которого ориентировано вдоль направления перемещения якоря.
Ярма и постоянный магнит или магниты образуют предпочтительно магнитопроводящее полое тело с прорезью, через которую во внутреннюю часть полого тела может втягиваться якорь.
В замкнутом положении якоря его первая упорная поверхность прилегает преимущественно снаружи к внешней стороне полого тела, а вторая упорная поверхность якоря - внутри к внутренней стороне полого тела.
Также предпочтительно, если полое тело выполнено трубчатым или желобчатым и проходит вдоль продольной оси, ориентированной перпендикулярно заданному направлению перемещения якоря, который закрывает проходящую параллельно продольной оси прорезь. Преимущественно полое тело, по меньшей мере, на отдельных участках своих переднего и заднего концов трубы или желоба закрыто соответствующей пластиной, преимущественно из магнитонепроводящего материала.
Якорь представляет собой предпочтительно втягивающийся якорь Т-образного сечения.
Якорь соединен преимущественно с пружинным устройством, оказывающим усилие пружины вдоль направления его разомкнутого положения, в котором магнитный контур разомкнут.
Кроме того, изобретение относится к способу сборки электромагнитного привода электрического выключателя, в частности электрического силового выключателя. Согласно изобретению, предусмотрено, что привод предварительно собирается, а магнитный контур затем замыкается якорем за счет его приведения в замкнутое положение, привод приводится в состояние подрегулирования и происходит саморегулирование положений ярм по отношению друг к другу за счет магнитной силы постоянного магнита, а после саморегулирования ярма приводятся в жестко собранное состояние, в котором их ориентация остается фиксированной независимо от дальнейшего позиционирования якоря.
В отношении преимуществ предложенного способа следует сослаться на приведенные выше рассуждения в связи с электрическим выключателем, поскольку преимущества способа, в основном, соответствуют преимуществам выключателя.
Предпочтительно, если в состоянии подрегулирования по меньшей мере два ярма, приводимые магнитной силой постоянного магнита, перемещаются по отношению друг к другу вдоль направления перемещения якоря, пока упорная поверхность первого ярма не будет располагаться с саморегулированием на расстоянии от упорной поверхности второго ярма, которое соответствует расстоянию между первой и второй упорными поверхностями якоря в заданном направлении перемещения.
Согласно одному особенно предпочтительному варианту, предусмотрено, что привод приводится в состояние подрегулирования за счет того, что резьбовое соединение между по меньшей мере двумя ярмами, перемещающимися по отношению друг к другу в заданном диапазоне вдоль направления перемещения якоря ослабляется, а после саморегулирования ярма снова жестко свинчиваются.
Изобретение более подробно поясняется ниже на примерах его осуществления со ссылкой на прилагаемые чертежи, на которых изображают:
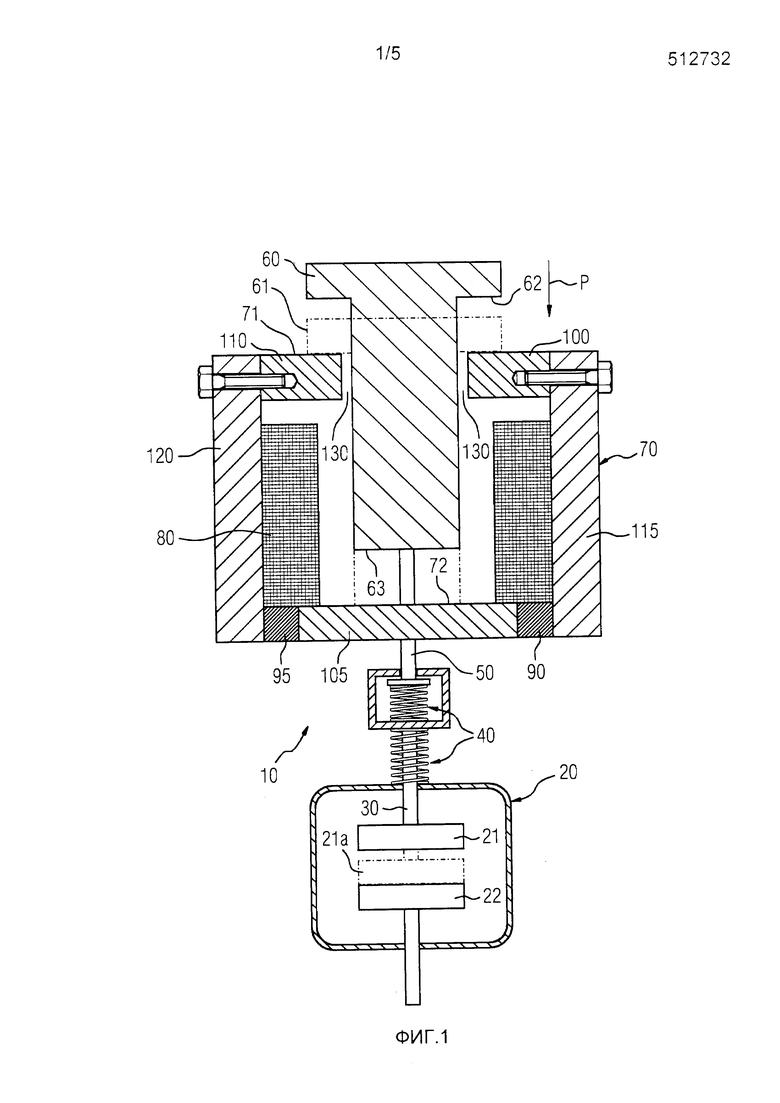
- фиг. 1: пример выполнения устройства с электромагнитным приводом и соединенным с ним электрическим выключателем;
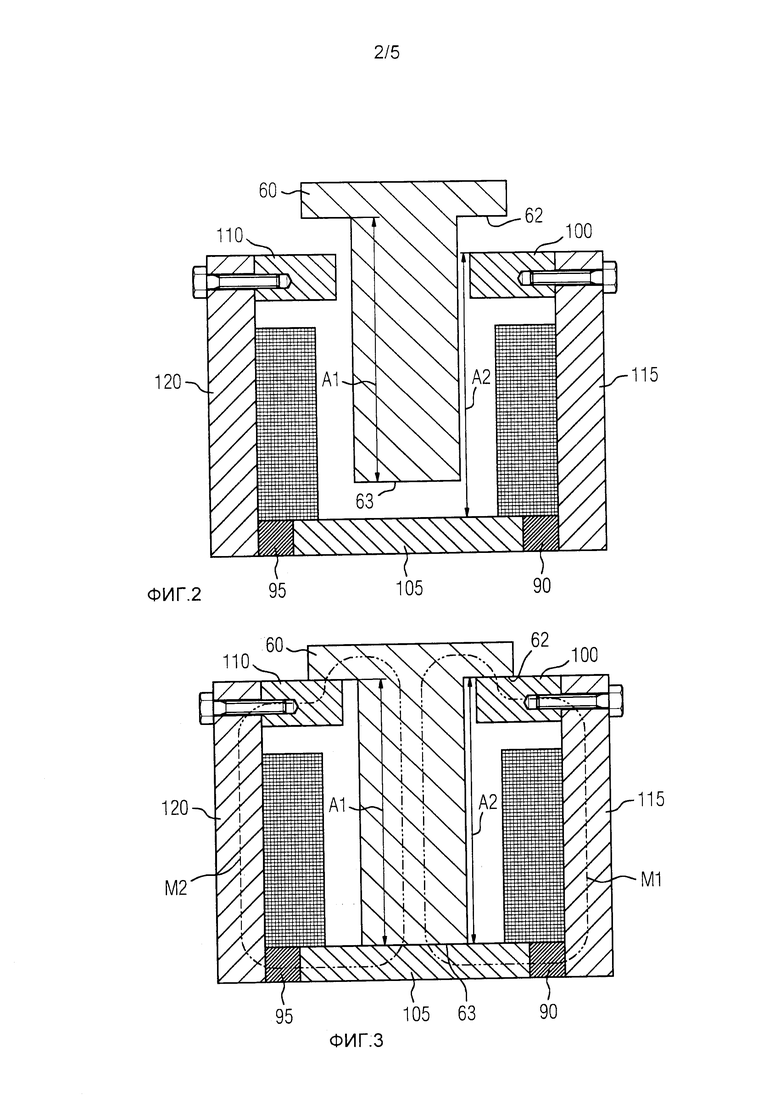
- фиг. 2: более подробно втягивающийся якорь электромагнитного привода из фиг. 1 в разомкнутом положении;
- фиг. 3: втягивающийся якорь из фиг. 2 в замкнутом положении;
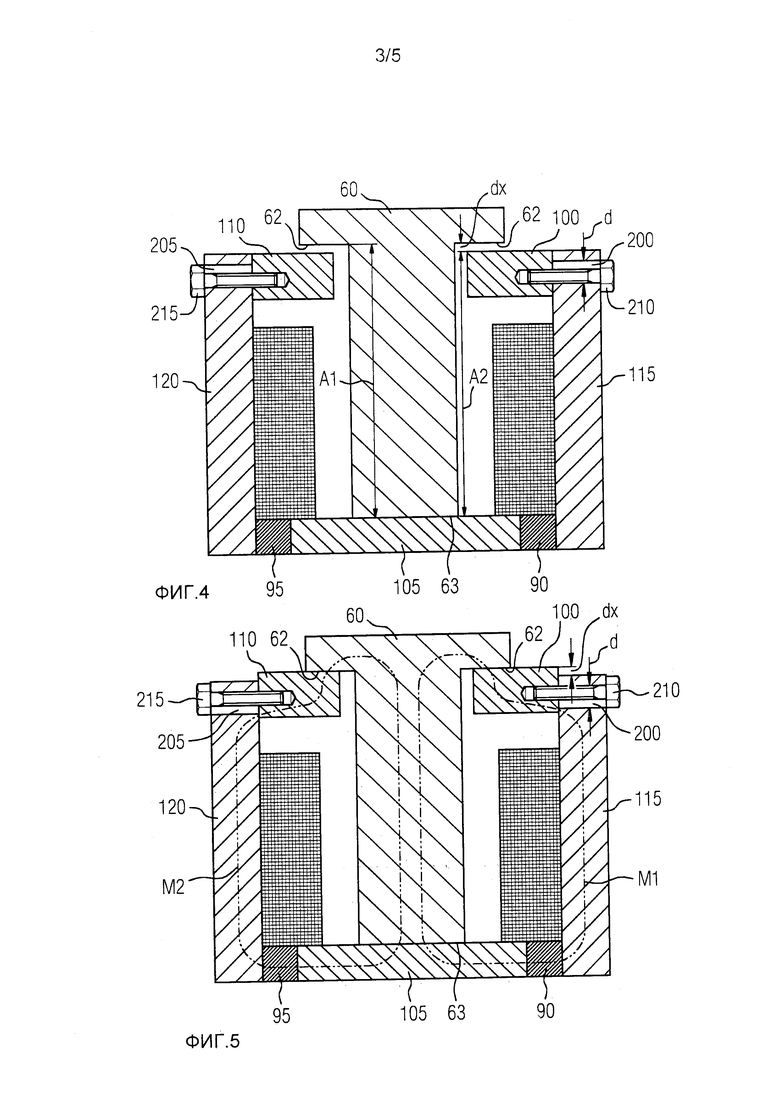
- фиг. 4: второй пример выполнения электромагнитного привода, втягивающийся якорь которого незначительно велик для полого тела, в которое он должен втягиваться;
- фиг. 5: втягивающийся якорь из фиг. 4 после подрегулирования привода;
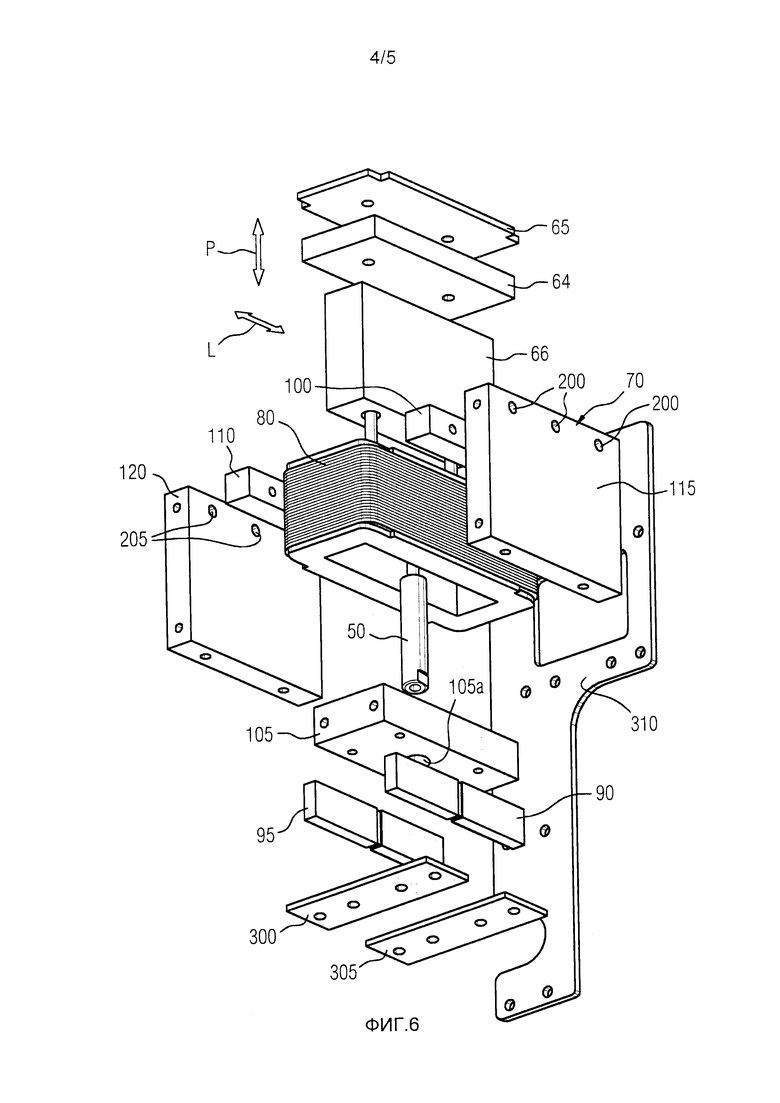
- фиг. 6: пример выполнения электромагнитного привода в разобранном виде в перспективе;
- фиг. 7: электромагнитный привод из фиг. 6 в собранном состоянии.
Для наглядности на чертежах идентичные или сопоставимые компоненты всегда обозначены одинаковыми ссылочными позициями.
На фиг. 1 изображен электромагнитный привод 10 электрического выключателя 20, который может представлять собой, например, силовой выключатель. Выключатель 20 содержит подвижный 21 и неподвижный 22 коммутирующие контакты.
Подвижный коммутирующий контакт 21 соединен с приводным штоком 30 привода 10, который взаимодействует с пружинным устройством 40 последнего. К пружинному устройству 40 снаружи присоединен дополнительный приводной шток 50, соединенный с втягивающимся якорем 60 привода 10.
Якорь 60 может совершать в заданном направлении Р перемещения движение подъема и при этом втягиваться в магнитное полое тело 70 привода 10. На фиг. 1 якорь 60, обозначенный сплошными линиями, показан в разомкнутом положении, в котором он выдается из полого тела 70. Штриховыми линиями и поз.61 обозначено замкнутое положение якоря 60, в котором он полностью втянут в полое тело 70.
Функция пружинного устройства 40 состоит в том, чтобы давить на приводной шток 50 вверх и нагружать якорь 60 своим усилием, которое должно привести его в разомкнутое положение. В разомкнутом положении якоря 60 подвижный коммутирующий контакт 21 находится в разомкнутом положении, обозначенном на фиг. 1 сплошными линиями.
Как более подробно поясняется ниже, за счет подачи тока к катушке 80 привода 10 можно создать магнитную силу, с помощью которой якорь 60 против усилия пружинного устройства 40 приводится в свое замкнутое положение. В этом замкнутом положении якорь 60 удерживается полым телом 70 даже тогда, когда ток через катушку 80 не подается. Магнитная сила, которая требуется полому телу 70 для удержания якоря 60 в замкнутом положении, создается двумя постоянными магнитами 90, 95, являющимися составными частями полого тела 70. Помимо обоих постоянных магнитов 90, 95 полое тело 70 содержит на фиг. 1 пять ярм 100, 105, 110, 115, 120. Их расположение выбрано таким образом, что полое тело 70 образует прорезь 130, через которую в него может втягиваться якорь 60, в основном, Т-образного сечения. Ярма состоят из намагничиваемого материала, например железосодержащего.
Как только якорь 60 достигнет своего замкнутого положения, оба приводных штока 30, 50 будут давить на подвижный коммутирующий контакт 21 вниз, в результате чего он также достигает своего замкнутого положения и замыкает выключатель 20. Подвижное положение коммутирующего контакта 21 обозначено на фиг. 1 штриховыми линиями и ссылочной позицией 21а.
Кроме того, на фиг. 1 видно, что якорь 60 имеет первую 62 и вторую 63 упорные поверхности. В замкнутом положении якоря 60 упорная поверхность 62 прилегает к внешней стороне 71 полого тела 70 или к внешним сторонам ярм 100, 110. В замкнутом положении якоря 60 упорная поверхность 63 прилегает к внутренней стороне 72 полого тела 70, а именно к внутренней стороне ярма 105.
В замкнутом положении якоря 60 замыкаются два магнитных контура, магнитный поток которых вызван обоими постоянными магнитами 90, 95. Магнитный поток первого магнитного контура течет от постоянного магнита 90 через ярма 115, 110, якорь 60 и ярмо 105 обратно к магниту 90. Магнитный поток второго магнитного контура течет от постоянного магнита 95 через ярма 120, 110, якорь 60 и ярмо 105.
За счет магнитной силы обоих магнитных контуров якорь 60 удерживается в своем замкнутом положении, хотя усилие пружинного устройства 40 стремится привести его в разомкнутое положение. Следовательно, усилие пружинного устройства 40 меньше магнитной силы магнитных контуров обоих постоянных магнитов 90, 95.
Если выключатель 20 должен быть разомкнут с помощью привода 10, то к катушке 80 подается ток, встречный обоим магнитным контурам обоих постоянных магнитов 90, 95. За счет этого магнитная удерживающая сила обоих магнитных контуров обоих постоянных магнитов 90, 95 уменьшается, так что усилия пружинного устройства 40 достаточно, чтобы давить на якорь 60 в его разомкнутое положение. В разомкнутом положении якоря 60 расстояние между упорной поверхностью 62 и внешней стороной 71 полого тела 70 и расстояние между упорной поверхностью 63 и его внутренней стороной 72 настолько велики, что магнитной силы постоянных магнитов. 90, 95 больше недостаточно, чтобы замкнуть якорь 60 против усилия пружинного устройства 40.
На фиг. 2 для большей наглядности якорь 60 изображен в своем замкнутом положении в увеличенном виде. Расстояние А1 между упорными поверхностями 62, 63 соответствует расстоянию А2 между внешней стороной ярма 100 и внутренней стороной ярма 105. По этой причине оба магнитных контура обоих постоянных магнитов 90, 95 замыкаются без зазора, по меньшей мере, приблизительно без зазора, когда якорь 60 полностью втянут в полое тело 70. Более подробно это показано на фиг. 3.
На фиг. 3 видно, что упорная поверхность 62 прилегает к внешней стороне ярм 100, 110, а оба магнитных контура M1, М2 в этом месте замыкаются. Соответствующим образом оба магнитных контура M1, М2 замыкаются также на упорной поверхности 63, поскольку она полностью прилегает к внутренней стороной ярма 105.
Показанное на фиг. 3 полное замыкание обоих магнитных контуров M1, М2 в приводе 10 на фиг. 1-3 возможно только потому, что расстояние А1 между обеими упорными поверхностями 62, 63 идентично расстоянию А2 между внешними сторонами ярм 100, 110 и внутренней стороной ярма 105.
В примере на фиг. 1-3 имеется преимущественно возможность подрегулирования, с помощью которого положение ярм может впоследствии самопроизвольно регулироваться по отношению друг к другу; принцип такого подрегулирования поясняется ниже на примерах, в которых длина якоря 60 неоптимальна.
На фиг. 4 изображен случай, когда расстояние А1 между обеими упорными поверхностями 62, 63 якоря 60 чуть больше расстояния А2. Здесь справедливо уравнение:
A1=A2+dx.
Разность dx длин может основываться на производственных допусках при изготовлении ярм, в частности четвертого 115 и пятого 120 ярм, или на производственных допусках при изготовлении якоря 60.
Чтобы, несмотря на это, якорь 60 в своем замкнутом положении мог замкнуть оба магнитных контура M1, М2 (фиг. 3) без перекрытия воздушных зазоров, в примере на фиг. 4 в ярмах 115, 120 предусмотрено подрегулирование, с помощью которого можно впоследствии скорректировать производственные допуски.
На фиг. 4 видно, что ярма 115, 120 снабжены соответственно отверстием 200 и 205, диаметры d которых чуть больше диаметра соответственно крепежного винта 210 и 215, которые ввинчены соответственно в ярма 100, 110 и удерживают с зажимом соответственно ярма 115, 120. За счет выполненных с припуском отверстий 200, 205 можно впоследствии скорректировать разность dx длин путем ослабления обоих крепежных винтов 210, 215 в замкнутом положении якоря 60. За счет магнитной силы обоих постоянных магнитов 90, 95 ярма 100, 110 подтягиваются вверх, в результате чего они своими верхними сторонами прилегают к упорной поверхности 62 якоря 60. Это показано на фиг. 5. Подтягивание ярм 100, 110 основано на магнитной силе обоих магнитных контуров M1, М2, которые всегда оказывают магнитную силу таким образом, что они замыкаются без зазора. Показанный на фиг. 4 воздушный зазор между якорем 60 и ярмами 100, 110 закрыт магнитной силой постоянных магнитов 90, 95 за счет того, что оба ярма подтягиваются вверх на разность dx длин.
Диаметр d отверстий 200, 205 вдоль направления перемещения якоря 60 преимущественно по меньшей мере на 10% больше диаметра крепежных винтов 210, 215. Отверстия 200, 205 могут представлять собой, например, пазы, продольное направление которых ориентировано вдоль направления перемещения якоря 60.
Как только это саморегулирование, основанное на магнитной силе постоянных магнитов 90, 95, завершено, крепежные винты 210, 215 можно снова затянуть, так что положение ярм 100, 110 за счет зажима снова фиксировано относительно ярм 115, 120 соответственно. После фиксации расстояние между обеими упорными поверхностями 62, 63 якоря 60 соответствует расстоянию между внешними сторонами ярм 100, 110 и внутренней стороной ярма 105.
На фиг. 6 в перспективе и в разобранном виде изображен пример механического строения электромагнитного привода. Ярмо 100 свинчивается с ярмом 115 винтами, вставленными в выполненные с припуском отверстия 200. Между ярмами 115, 105 находится постоянный магнит 90, фиксируемый на них двумя крепежными пластинами 300, 305. Кроме того, обе крепежные пластины 300, 305 фиксируют постоянный магнит 95, расположенный между ярмами 105, 120. На ярме 120 ярмо 110 фиксируется крепежными винтами, вставленными в выполненные с припуском отверстия 205.
Как уже сказано, отверстия 200, 205 чуть больше используемых крепежных винтов, так что может произойти самопроизвольное подрегулирование, если якорь 60 слишком велик или слишком мал, а в его замкнутом положении возникают нежелательные воздушные зазоры. В примере на фиг. 6 якорь 60 образован верхней якорной 64 и направляющей 65 пластинами, привинченными к его средней части 66.
Кроме того, на фиг. 6 виден дополнительный приводной шток 50, входящий в отверстие 105а ярма 105.
Кроме того, на фиг. 6 видно, что ярма 100, 105, 110, 115, 120 и постоянные магниты 90, 95 образуют полое тело, которое выполнено трубчатым или желобчатым и проходит вдоль продольной оси L. Последняя перпендикулярна заданному направлению Р перемещения, в котором якорь 60 совершает свое возвратно-поступательное движение. Передний и задний концы трубчатого или желобчатого полого тела закрыты пластинами, из которых на фиг. 6 показана только одна пластина 310.
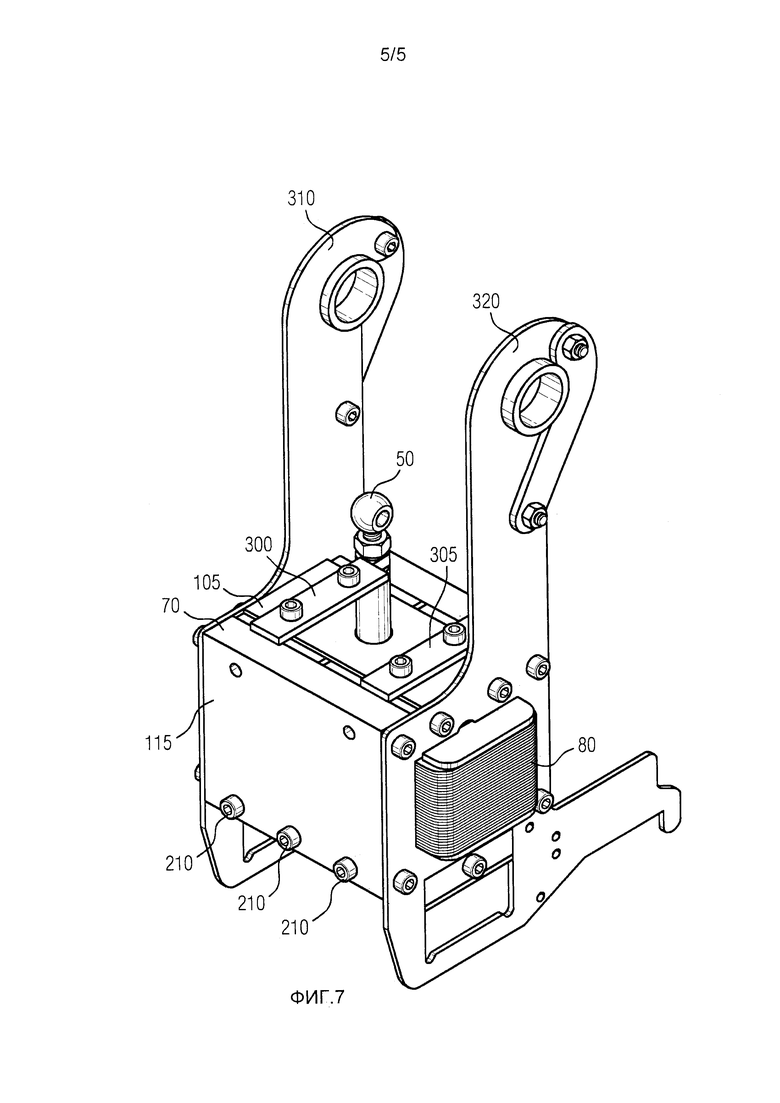
На фиг. 7 электромагнитный привод из фиг. 6 показан в собранном состоянии. Видны две пластины 310, 320, которые замыкают трубчатое или желобчатое полое тело 70 с обоих концов. Кроме того, виден дополнительный приводной шток 50, который выведен из полого тела 70 и может быть соединен с пружинным устройством 40 на фиг. 1.
Кроме того, видны ярма 115, 105, крепежные пластины 300, 305 и катушка 80, которая может выдаваться из полого тела 70 через выемки в обеих пластинах 310, 320. Также видны крепежные винты 210, которыми ярмо 100 свинчено с ярмом 115 таким образом, что возможно описанное самопроизвольное подрегулирование.
Хотя изобретение было подробно проиллюстрировано и описано раскрытыми предпочтительными примерами его осуществления, оно не ограничено ими, и специалист может вывести из них другие варианты, не выходящие за объем охраны изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 - электромагнитный привод
20 - электрический выключатель
21 - подвижный коммутирующий контакт
21а - подвижное положение
22 - неподвижный коммутирующий контакт
30 - приводной шток
40 - пружинное устройство
50 - приводной шток
60 - втягивающийся якорь
61 - замкнутое положение якоря
62 - первая упорная поверхность якоря
63 - вторая упорная поверхность якоря
64 - якорная пластина
65 - направляющая пластина
66 - средняя часть якоря
70 - полое тело
71 - внешняя сторона
72 - внутренняя сторона
80 - катушка
90 - постоянный магнит
95 - постоянный магнит
100 - первое ярмо
105 - второе ярмо
105а - отверстие
110 - третье ярмо
115 - четвертое ярмо
120 - пятое ярмо
130 - прорезь
200 - отверстие
205 - отверстие
210 - крепежный винт
215 - крепежный винт
300 - крепежная пластина
305 - крепежная пластина
310 - пластина
320 - пластина
А1 - расстояние
А2 - расстояние
d - диаметр
dx - разность длин
L - продольная ось
M1 - магнитный контур
М2 - магнитный контур
Р - направление перемещения
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2003 |
|
RU2322724C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД С ДВУМЯ УСТОЙЧИВЫМИ СОСТОЯНИЯМИ ДЛЯ СРЕДНЕВОЛЬТНОГО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2010 |
|
RU2540114C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ДЛЯ КОММУТАЦИОННЫХ АППАРАТОВ | 2004 |
|
RU2324252C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЯ | 2015 |
|
RU2605938C1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПУСКАТЕЛЬ | 1998 |
|
RU2216806C2 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2008 |
|
RU2375776C1 |
| ЛИНЕЙНЫЙ АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ И МАГНИТНОЕ ЯРМО ДЛЯ ЛИНЕЙНОГО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2007 |
|
RU2399112C1 |
| ИНДУКТОРНОЕ СИНХРОННОЕ УСТРОЙСТВО | 2005 |
|
RU2361350C2 |
| ВИБРАТОР С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ | 2021 |
|
RU2774059C1 |
Изобретение относится к электромагнитному приводу (10) электрического выключателя (20), в частности электрического силового выключателя, содержащему по меньшей мере один подвижный якорь (60), который может совершать в заданном направлении (Р) перемещения возвратно-поступательное движение, соединяется косвенно или непосредственно с подвижным коммутирующим контактом (21) выключателя (20) и в замкнутом положении (61) замыкает магнитные контуры (М1, М2) привода (10) на первой упорной поверхности (62) якоря (60) с первым магнитопроводящим ярмом (100) привода и на второй упорной поверхности (63) якоря (60) – со вторым магнитопроводящим ярмом (105) привода (10), по меньшей мере один постоянный магнит (90, 95), вырабатывающий магнитное поле для магнитного контура (М1, М2) и удерживающую силу для удержания якоря (60) в замкнутом положении (61), и по меньшей мере одну катушку (80), расположенную таким образом, что она может вырабатывать магнитный поток за счет протекания тока через нее, попутный или встречный магнитному потоку постоянного магнита (90, 95) в магнитном контуре (М1, М2), причем после сборки электромагнитный привод (10) обеспечивает состояние подрегулирования за счет того, что благодаря магнитной силе постоянного магнита (90, 95) возможно саморегулирование положений первого и второго ярм (100, 105) по отношению друг к другу, и причем оба ярма (100, 105) могут быть приведены в прочно собранное положение за счет того, что они фиксированно ориентированы независимо от дальнейшего позиционирования якоря (60). 2 н. и 8 з.п. ф-лы, 7 ил.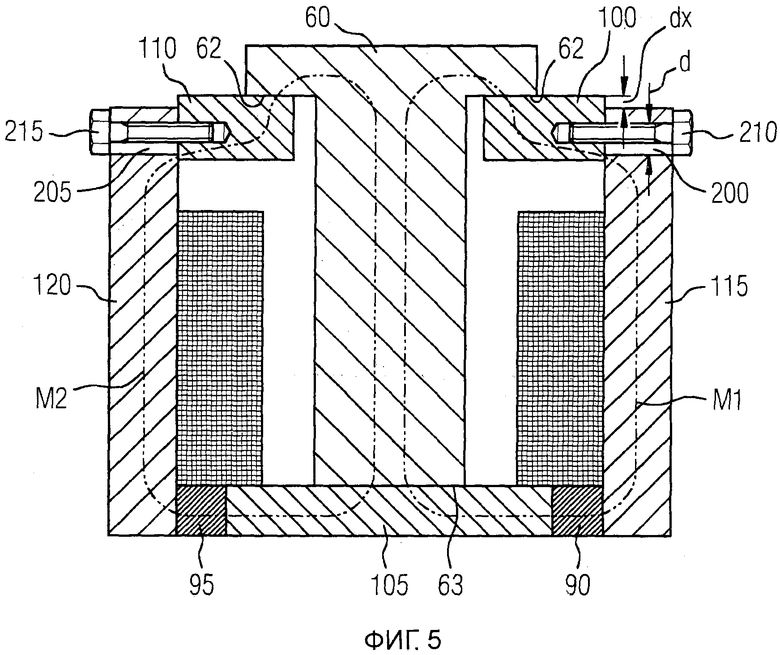
1. Электромагнитный привод (10) электрического выключателя (20), содержащий:
- по меньшей мере один подвижный якорь (60), выполненный с возможностью совершения вдоль заданного направления (Р) перемещения возвратно-поступательного движения, с возможностью соединения опосредованно или непосредственно с подвижным коммутирующим контактом (21) выключателя (20) и в замкнутом положении (61) с возможностью замыкания магнитных контуров (M1, М2) привода (10) на первой упорной поверхности (62) со стороны якоря с первым магнитопроводящим ярмом (100) привода (10) и на второй упорной поверхности (63) со стороны якоря - со вторым магнитопроводящим ярмом (105) привода (10),
- по меньшей мере один постоянный магнит (90, 95), выполненный с возможностью вырабатывания магнитного поля для магнитного контура (M1, М2) и удерживающей силы для удержания якоря (60) в замкнутом положении (61), и
- по меньшей мере одну катушку (80), расположенную таким образом, что обеспечивается возможность вырабатывания магнитного потока за счет протекания тока через катушку (80), попутного или встречного магнитному потоку постоянного магнита (90, 95) в магнитном контуре (M1, М2),
- причем после выполненной сборки электромагнитный привод (10) обеспечивает состояние подрегулирования, при котором благодаря магнитной силе постоянного магнита (90, 95) возможно саморегулирование положений первого и второго ярм (100, 105) по отношению друг к другу, и
- причем оба ярма (100, 105) могут быть приведены в жестко собранное положение, в котором ориентация ярм (100, 105) является фиксированной независимо от дальнейшего позиционирования якоря (60),
- причем в состоянии подрегулирования магнитный контур (M1, М2) замкнут якорем (60), и по меньшей мере два ярма (100, 105) привода (10) выполнены с возможностью перемещения по отношению друг к другу вдоль направления (Р) перемещения якоря (60), так что при приведении в действие посредством магнитной силы постоянного магнита (90, 95) упорная поверхность первого ярма (100) с саморегулированием располагается на расстоянии (А2) от упорной поверхности второго ярма (105), идентичном расстоянию (А1) между первой и второй упорными поверхностями (62, 63) со стороны якоря вдоль заданного направления (Р) перемещения,
отличающийся тем, что
- по меньшей мере два ярма (100, 105), выполненные с возможностью перемещения по отношению друг к другу вдоль направления (Р) перемещения якоря (60), свинчены друг с другом, причем винт (210, 215) вставлен в отверстие в одном из двух ярм (100, 105) и свинчен с другим из двух ярм (100, 105), причем диаметр (d) отверстия вдоль направления (Р) перемещения якоря (60) больше диаметра винта (210, 215),
- причем при ослабленном винтовом соединении и в замкнутом положении (61) якоря (60) ярма (100, 105) находятся в состоянии подрегулирования, а
- при жестко затянутом винтовом соединении ярма (100, 105) находятся в жестко собранном состоянии.
2. Привод п. 1, отличающийся тем, что ярма (100, 105) и постоянный магнит или постоянные магниты (90, 95) образуют магнитопроводящее полое тело (70) с прорезью (130), через которую якорь (60) может втягиваться во внутреннюю часть полого тела (70).
3. Привод по п. 2, отличающийся тем, что замкнутом положении (61) якоря (60) первая упорная поверхность (62) со стороны якоря прилегает снаружи к внешней стороне (71) полого тела (70), а вторая упорная поверхность (63) со стороны якоря прилегает внутри к внутренней стороне (72) полого тела (70).
4. Привод по п. 2, отличающийся тем, что
- полое тело (70) выполнено трубчатым или желобчатым и проходит вдоль продольной оси (L), ориентированной перпендикулярно заданному направлению (Р) перемещения якоря (60),
- полое тело (70), по меньшей мере, на отдельных участках на своем переднем и заднем конце трубы или желоба соответственно закрыто пластиной (310, 320),
- прорезь (130) проходит параллельно продольной оси (L) и
- якорь (60) закрывает прорезь (130).
5. Привод по п. 2, отличающийся тем, что якорь (60) представляет собой втяжной якорь Т-образного сечения.
6. Привод по п. 2, отличающийся тем, что якорь (60) соединен с пружинным устройством (40), выполненным с возможностью оказания усилия пружины в направлении разомкнутого положения якорь (60), в котором магнитный контур (M1, М2) разомкнут.
7. Привод по п. 1, отличающийся тем, что электромагнитный привод (10) является приводом электрического силового выключателя.
8. Способ сборки электромагнитного привода (10) электрического выключателя (20) по любому из пп. 1-7, отличающийся тем, что
- привод (10) предварительно собирают и магнитный контур (М1, М2) затем замыкают якорем (60) за счет приведения якоря (60) в его замкнутое положение (61),
- привод (10) приводят в состояние подрегулирования и осуществляют саморегулирование положений ярм (100, 105) по отношению друг к другу за счет магнитной силы постоянного магнита (90, 95), и
- после осуществленного саморегулирования ярма (100, 105) приводят в жестко собранное состояние, в котором ориентация ярм (100, 105) остается фиксированной независимо от дальнейшего позиционирования якоря (60).
9. Способ по п. 8, отличающийся тем, что в состоянии подрегулирования по меньшей мере два ярма (100, 105), приводимые магнитной силой постоянного магнита (90, 95), перемещают по отношению друг к другу вдоль направления (Р) перемещения якоря (60), пока упорная поверхность первого ярма (100) не будет располагаться с саморегулированием на расстоянии (А2) от упорной поверхности второго ярма (105), идентичном расстоянию (А1) между первой и второй упорными поверхностями (62, 63) со стороны якоря вдоль заданного направления (Р) перемещения.
10. Способ по п. 8, отличающийся тем, что
- привод (10) приводят в состояние подрегулирования за счет того, что винтовое соединение между по меньшей мере двумя ярмами (100, 105), перемещаемыми по отношению друг к другу в заданном диапазоне вдоль направления (Р) перемещения якоря (60), ослабляют и
- после осуществленного саморегулирования ярма (100, 105) снова жестко свинчивают.
| Колосоуборка | 1923 |
|
SU2009A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЕЙ | 1994 |
|
RU2074438C1 |
| Способ получения депрессанта | 1989 |
|
SU1811536A3 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 1988 |
|
SU1826784A1 |

