Изобретение относится к области радиоэлектронной борьбы и может быть использовано для защиты мобильных объектов, например железнодорожных и фунтовых ракетных комплексов стратегического назначения, железнодорожных составов и автомобильных колонн при транспортировке особо охраняемых грузов от радиолокационных средств разведки и наведения оружия.
Известна размещаемая на носителе (мобильном объекте) станция помех индивидуальной защиты от радиолокационных средств разведки и наведения оружия, содержащая подсистему разведки, подсистему управления и подсистему создания помех [см., например, Палий А.И. Радиоэлектронная борьба, 2 изд. переработанное и доп., - М.: Воениздат, 1989, с. 34-37].
Недостатком станции является высокая вероятность поражения мобильного объекта самонаводящимся по радиоизлучению оружием. Источником радиоизлучения является подсистема создания помех, размещенная на мобильном объекте.
Наиболее близким по технической сущности к заявляемому изобретению является устройство защиты объектов, состоящее из средств разведки, устройства (пульта) управления и дистанционно-управляемых малогабаритных модулей помех (ММП). При этом ММП предварительно доставляются в район размещения подавляемой РЛС (см., например, В.Г. Радзиевский В.Г. Сетецентрическая пространственно-распределенная система на основе малогабаритных модулей разведки и помех. - Радиотехника, 2012, №6, с. 4-11).
Недостатком устройства является необходимость размещения ММП в непосредственной близости от РЛС, что особенно проблематично применительно к РЛС воздушного и космического базирования. Кроме того, устройство не учитывает особенности прикрытия наземных мобильных объектов, когда зона подавления должна быть в районе нахождения мобильного объекта, то есть ММП должен быть включен при входе мобильного объекта, например, в зону его действия и выключен при выходе из зоны подавления.
Техническим результатом изобретения является расширение функциональных возможностей устройства защиты мобильных объектов от радиолокационных средств разведки и наведения оружия за счет:
- предварительной установки ММП вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание подавляемого радиолокационного средства в зоне их действия;
- включения и выключения ММП в соответствии с местом нахождения мобильного объекта.
Указанный технический результат достигается тем, что в известном устройстве защиты мобильных объектов от радиолокационных средств разведки и наведения оружия, содержащем пульт управления, состоящий из последовательно соединенных формирователя команд управления и линии связи, и дистанционно-управляемые ММП, согласно изобретению в пульт управления дополнительно введены блок коммутации, блок определения дальности до ММП, первая и вторая схемы сравнения, выходы которых соединены со вторым и третьим входами формирователя команд управления соответственно, первый, второй, третий, четвертый и пятый выходы блока коммутации соединены с первым входом формирователя команд управления, первым входом первой схемы сравнения, первым и вторым входами блока определения дальности до ММП, вторым входом второй схемы сравнения соответственно, а второй вход первой схемы сравнения и первый вход второй схемы сравнения объединены и соединены с выходом блока определения дальности до ММП.
Указанный технический результат достигается тем, что ММП предварительно установлены вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание радиолокационного средства в зоне действия, по меньшей мере, одного ММП.
Указанный технический результат достигается тем, что малогабаритный модуль помех формирует круговое поле помех в заданном диапазоне частот.
Указанный технический результат достигается тем, что в одной точке установлен, по меньшей мере, один малогабаритный модуль помех.
Сущность изобретения заключается в том, что в пульт управления дополнительно введены блок коммутации, блок определения дальности до ММП, первая и вторая схемы сравнения, выходы которых соединены со вторым и третьим входами формирователя команд управления соответственно, первый, второй, третий, четвертый и пятый выходы блока коммутации соединены с первым входом формирователя команд управления, первым входом первой схемы сравнения, первым и вторым входами блока определения дальности до ММП, вторым входом второй схемы сравнения соответственно, а второй вход первой схемы сравнения и первый вход второй схемы сравнения объединены и соединены с выходом блока определения дальности до ММП.
ММП предварительно установлены вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание подавляемого радиолокационного средства в зоне действия, по меньшей мере, одного малогабаритного модуля помех. Малогабаритные модули помех могут быть установлены, например, на опорах линий электропередач, на элементах инженерных сооружений железнодорожного пути, на дорожных и путевых столбах и т.д. Малогабаритный модуль помех формирует круговое поле помех в заданном диапазоне частот, что обеспечивает защиту мобильного объекта со всех направлений.
Перед началом движения в пульт управления вводят следующую информацию:
координаты установленных вдоль трассы ММП;
длину мобильного объекта (длину колонны);
дальность до ММП, при достижении которой происходит его включение на излучение (первая заданная дальность);
дальность до ММП, при удалении на которую происходит выключение излучения (вторая заданная дальность);
информацию о режимах работы ММП.
Информация о режимах работы ММП может содержать: диапазон частот, мощность излучения и т.д. Информация для задания режимов работы ММП может быть сформирована, например, путем анализа данных, полученных из вышестоящего органа управления; изучения состава, базирования и возможностей радиолокационных средств разведки и наведения оружия, анализа способов их применения. Значения первой и второй заданных дальностей могут быть равными и варьироваться.
Пульт управления подключают к мобильному объекту через блок коммутации. С использованием координат мобильного объекта, получаемых, например, от глобальной навигационной системы, и координат ММП, введенных в пульт управления, определяют дальность до него. При достижении значения расчетной дальности, равного первой заданной дальности, передается команда на включение данного ММП. Команда на его выключение подается при достижении расчетной дальности величины (L+Дзад2), где L - длина защищаемого объекта; Дзад2 - вторая заданная дальность.
Таким образом, происходит последовательное включение ММП и последовательное их выключение. Одновременно будут излучать несколько ММП, которые обеспечат прикрытие мобильного объекта спереди, сзади и по всей его длине. С перемещением мобильного объекта происходит «перемещение» поля помех с той же скоростью, с какой движется мобильный объект. При стоянке мобильного объекта будут излучать все включенные ММП до тех пор, пока мобильный объект не начнет движение, то есть не начнется изменение расчетной дальности. Поэтому мобильный объект на всем пути своего следования будет непрерывно прикрыт полем помех, что обеспечит эффективную его защиту от РЛС разведки и наведения оружия.
Управление режимами работы ММП осуществляется аналогично прототипу. Отличие заключается лишь в том, что режимы работы задаются предварительно до начала движения и хранятся в блоке коммутации. Параметры режимов работы ММП передаются вместе с командой на его включение.
Этим достигается указанный в изобретении технический результат.
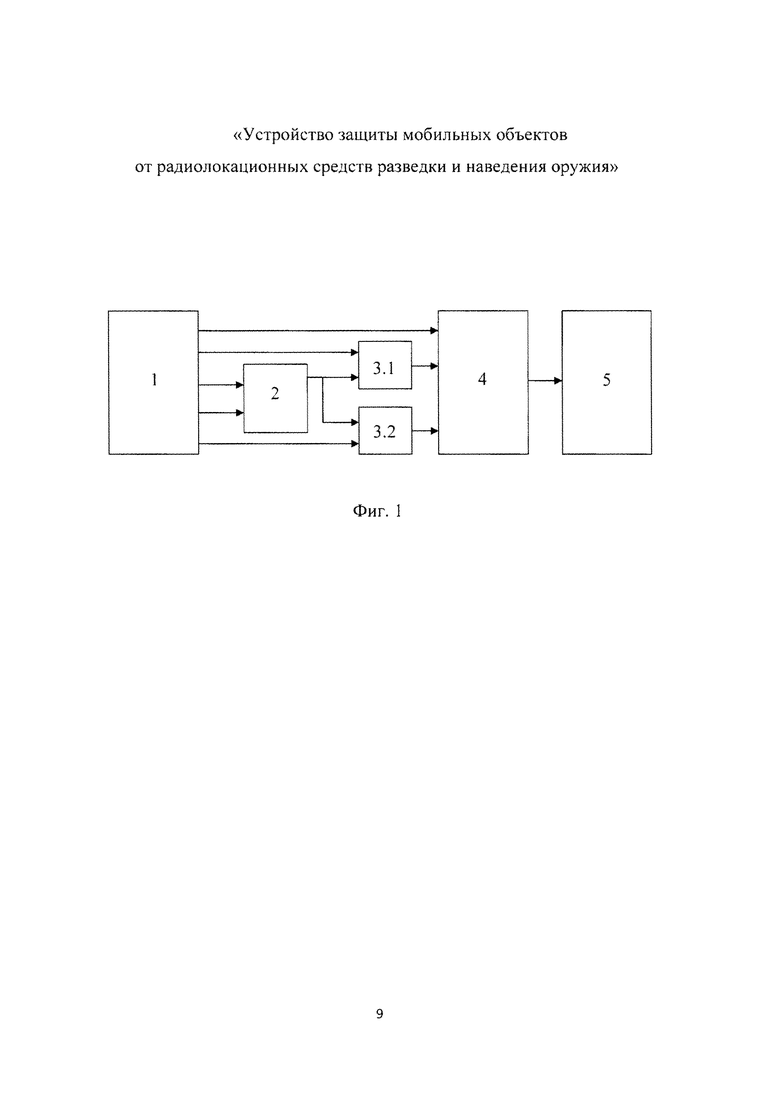
Структурная схема устройства управления приведена на фигуре, где обозначено: 1 - блок коммутации, 2 - блок определения дальности до ММП, 3.1, 3.2 - схемы сравнения, 4 - формирователь команд управления, 5 - линия связи.
Блок коммутации 1 предназначен для подключения пульта управления к мобильному объекту (подключение питания, подключение к навигационному приемнику и т.д.), а также для ввода и хранения информации. Назначение блока определения дальности до ММП 2 и схем сравнения 3.1, 3.2 ясны из их названия.
Определение расстояния до ММП может быть выполнено, например, по методике определения расстояния между двумя точками по известным координатам (см., например, http://fizportal.ru/physics-book-1-6. Дата обращ. 12.03.2016 г.).
Блоки коммутации 1 и определения дальности до ММП 2 могут быть выполнены на микроконтроллерах семейства pic (см., например, http://elwo.ru/publ/skhemy_na_mikrokontrollerakh/mikrokontrollery_pic/9-1-0-251. Дата обращ. 13.03.2016 г.).
До начала движения мобильного объекта по заданному маршруту в блок коммутации вводят координаты ММП, длину мобильного объекта (длину колонны), заданные дальности, информацию о режимах работы ММП и подключают пульт управления к мобильному объекту.
Координаты мобильного объекта, полученные, например, в системе глобальной навигационной системы, и координаты ММП, записанные в блоке коммутации 1, поступают в блок определения дальности до ММП 2. Значение дальности до ММП поступает на второй вход первой 3.1 и на первый вход второй 3.2 схем сравнения. При достижении дальности до ММП первой заданной дальности на выходе первой схемы сравнения 3.1 формируется сигнал, который поступает на второй вход формирователя команд управления 4. На выходе формирователя команд управления формируется команда на включение и по линии связи 5 передается на ММП. После включения ММП по информации о режимах работы ММП, записанных в блоке коммутации 1, в формирователе команд управления 4 формируются команды управления и передаются по линии связи на ММП. В соответствии с этими командами устанавливаются заданные режимы их работы. При этом с пятого выхода блока коммутации 1 на второй вход второй схемы сравнения 3.2 поступает дальность (L+Дзад2), которая сравнивается с дальностью до ММП. При достижении значения дальности до ММП, равного дальности (L+Дзад2), на выходе второй схемы сравнения 3.2 формируется сигнал, который поступает на третий вход формирователя команд управления 4. На выходе формирователя команд управления 4 формируется команда на выключение и по линии связи 5 передается на ММП.
Таким образом, происходит последовательное включение и выключение ММП. Одновременно будут излучать несколько ММП, которые обеспечат прикрытие мобильного объекта спереди, сзади и по всей его длине. С перемещением мобильного объекта происходит «перемещение» поля помех с той же скоростью, с какой движется мобильный объект. Поэтому мобильный объект на всем пути своего следования будет непрерывно прикрыт полем помех, что обеспечит эффективную его защиту от РЛС разведки и наведения оружия.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ ОБЪЕКТОВ ОТ РАДИОЛОКАЦИОННЫХ СРЕДСТВ РАЗВЕДКИ И НАВЕДЕНИЯ ОРУЖИЯ | 2015 |
|
RU2577843C1 |
| Роботизированная пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2666126C1 |
| Индивидуальный комплект многоспектральных технических средств маскировки подвижных военных объектов с адаптивной системой управления физическими параметрами | 2022 |
|
RU2791934C1 |
| Пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2656247C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| Комплекс создания радиопомех аппаратуре потребителей глобальных навигационных спутниковых систем | 2019 |
|
RU2726939C1 |
| СПОСОБ ИСПЫТАНИЙ СИСТЕМ ЗАЩИТЫ ОБЪЕКТОВ ОТ ПОРАЖЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2016 |
|
RU2645006C1 |
Изобретение относится к области радиоэлектронной борьбы и может быть использовано для защиты мобильных объектов, например железнодорожных и грунтовых ракетных комплексов стратегического назначения, железнодорожных составов и автомобильных колонн при транспортировке особо охраняемых грузов от радиолокационных средств разведки и наведения оружия. Техническим результатом изобретения является расширение функциональных возможностей устройства защиты мобильных объектов от радиолокационных средств разведки и наведения оружия. Указанный технический результат достигается за счет: предварительной установки дистанционно-управляемых малогабаритных модулей помех (ММП) вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание радиолокационного средства в зоне их действия, включения и выключения ММП в соответствии с местом нахождения мобильного объекта, при этом в пульт управления введены блок коммутации, блок определения дальности до ММП, первая и вторая схемы сравнения, выходы которых соединены со вторым и третьим входами формирователя команд управления соответственно, первый, второй, третий, четвертый и пятый выходы блока коммутации соединены с первым входом формирователя команд управления, первым входом первой схемы сравнения, первым и вторым входами блока определения дальности до ММП, вторым входом второй схемы сравнения соответственно, а второй вход первой схемы сравнения и первый вход второй схемы сравнения объединены и соединены с выходом блока определения дальности до ММП. 3 з.п. ф-лы, 1 ил.
1. Устройство защиты мобильных объектов от радиолокационных средств разведки и наведения оружия, содержащее пульт управления, состоящий из последовательно соединенных формирователя команд управления и линии связи, и дистанционно-управляемые малогабаритные модули помех (ММП), отличающееся тем, что в пульт управления дополнительно введены блок коммутации, блок определения дальности до ММП, первая и вторая схемы сравнения, выходы которых соединены со вторым и третьим входами формирователя команд управления соответственно, первый, второй, третий, четвертый и пятый выходы блока коммутации соединены с первым входом формирователя команд управления, первым входом первой схемы сравнения, первым и вторым входами блока определения дальности до ММП, вторым входом второй схемы сравнения соответственно, а второй вход первой схемы сравнения и первый вход второй схемы сравнения объединены и соединены с выходом блока определения дальности до ММП.
2. Устройство по п. 1, отличающееся тем, что ММП предварительно установлены вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание радиолокационного средства в зоне действия, по меньшей мере, одного ММП.
3. Устройство по п. 1, отличающееся тем, что малогабаритный модуль помех формирует круговое поле помех в заданном диапазоне частот.
4. Устройство по п. 1, отличающееся тем, что в одной точке установлен, по меньшей мере, один малогабаритный модуль помех.
| РАДЗИЕВСКИЙ В.Г | |||
| Сетецентрическая пространственно-распределенная система на основе малогабаритных модулей разведки и помех | |||
| Ж.Радиотехника, 2012, N6, с.4-11 | |||
| Параметрический стабилизатор напряжения или тока | 1959 |
|
SU126147A1 |
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ СРЕДСТВ ОТ РАДИО, РАДИОЛОКАЦИОННЫХ, ОПТИКОЭЛЕКТРОННЫХ СРЕДСТВ РАЗВЕДКИ И ПОРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННЫХ ЛОЖНЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410710C2 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ ПОРАЖЕНИЯ ЕГО РАКЕТОЙ ИЛИ СНАРЯДОМ | 2011 |
|
RU2502082C2 |
| US 5321405 A, 14.06.1994 | |||
| JP 8075843 A, 22.03.1996 | |||
| US 4876545 A, 24.10.1989. | |||

