Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах, в различных природных средах: наземной, воздушной, надводной и подводной.
Функциональное назначение таких систем - разведка территории, мониторинг потенциально опасных объектов, обезвреживание/уничтожение этих объектов путем эвакуации, дезактивации или ликвидации, затруднение выполнения задач аналогичными средствами противника и т.п.
Мультиагентная робототехническая система в данном случае предполагает наличие группы взаимосвязанных наземных, воздушных, надводных и подводных мобильных роботов с разнообразным оборудованием, на которых смонтированы системы дистанционной связи с пультом управления и бортовая аппаратура, которая включает контроллер управления бортовой аппаратурой, блоки систем постановки помех, систем обнаружения радиолокационного, инфракрасного и видимого диапазонов, навигационных приемников, передатчика навигационных сигналов, систем опознавания «свой - чужой», командной радиолинии управления, приемопередатчиков сигналов связи, инерциальной системы навигации, сенсоров, контроллера управления движением и шасси применительно к среде эксплуатации роботов.
Известен беспилотный робототехнический комплекс дистанционного мониторинга и блокирования потенциально опасных объектов воздушными роботами (см. 1. Патент РФ на изобретение №2353891, М. кл. F41H 13/00, опубл. 27.04.2009), оснащенный интегрированной системой поддержки принятия решений по обеспечению требуемой эффективности применения роботов, содержащий взаимосвязанные автоматизированную транспортно-пусковую установку, автоматизированный пункт дистанционного управления и по крайней мере три одновременно применяемых в качестве воздушных роботов малогабаритных беспилотных летательных аппарата (БПЛА), при этом радиоэлектронное оборудование комплекса включает вычислители, автоматизированные рабочие места операторов, блоки интеллектуальной поддержки операторов, отображения информации, ввода-вывода данных, памяти, интеллектуального анализа данных, навигационного обеспечения, наведения, автопилоты, радиоприемники, радиопередатчики, приемники спутниковой системы определения местоположения, измерители угловых параметров полета, датчики развединформации, портативные передатчики радиопомех, микропроцессорные модули обработки данных и управления, интегрированные модули информационного взаимодействия, модули интеллектуального анализа данных, устройство информационно-технического сопряжения.
Однако этот комплекс не может осуществлять мониторинг с воздуха объектов, расположенных в труднодоступных районах на земной поверхности.
Известен мобильный робототехнический комплекс (см. 2. Патент РФ на изобретение №2364500, М. кл. B25J 5/00, опубл. 20.08.2009), который включает мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство (шасси) с электроприводным движителем и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления и бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства (шасси), причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, а по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве (шасси) укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, бортовая система диагностики с бортовыми пультами управления и устройствами индикации, при этом он дополнительно снабжен выносной системой видеонаблюдения, мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
Однако данная система имеет ограничения в применении при пропадании связи между пунктом управления и роботом, а также возникают сложности при организации одновременного мониторинга больших площадей, особенно при наличии препятствий, поскольку, как следует из описания, мобильный робототехнический комплекс не предусматривает одновременного взаимодействия нескольких устройств.
Известен подводный робототехнический комплекс (см. 3. Патент РФ на изобретение №2446983, М. кл. B63G 8/00, опубл. 10.04.2012), который содержит носитель оборудования, движительно-рулевую систему, систему энергообеспечения, навигационную систему, систему средств обнаружения, систему средств связи, балластно-уравнительную систему, вычислительную бортовую систему, судовой/береговой блок управления, информационно-измерительную систему, блок системы управления и опциональный механический манипулятор, при этом носитель оборудования выполнен в виде полой платформы, движительно-рулевая система содержит по меньшей мере один движитель, закрепленный на платформе, система энергообеспечения представляет собой распределительное устройство, расположенное в полости платформы и подключенное с одной стороны к сети электрических проводников, а с другой стороны - к питающему электрическому кабелю, балластно-уравнительная система представляет собой набор конструктивных элементов, участвующих в создании плавучести аппарата, близкой к нулевой, вычислительная бортовая система расположена в полости платформы и представляет собой первый промышленный компьютер с установленной операционной системой, обеспечивающей управление всеми системами, входящими в комплекс, а также сбор, сохранение и передачу на внешний пульт управления собранной информации, судовой/береговой блок управления представляет собой второй промышленный компьютер, коммутируемый с подводной частью комплекса посредством энергоинформационного подводного герметичного кабеля, состоящего из информационно-управляющего оптоволокна и силового кабеля, система средств обнаружения аппарата представляет собой совокупность маяков и маяков-ответчиков, установленных на элементах комплекса, навигационная система размещена в полости платформы и представляет собой набор средств для осуществления навигации и позиционирования аппарата.
Однако данная система не позволяет проводить исследования и мониторинг объектов на суше, а также осуществлять взаимодействие нескольких аналогичных систем.
Известен многофункциональный робототехнический комплекс обеспечения боевых действий (см. 4. Патент РФ на изобретение №2533229, М. кл B25J 5/00, опубл. 20.11.2014), содержащий самодвижущее транспортное средство с системой технического зрения, системой связи и передачи данных и пульт дистанционного управления, который содержит группу универсальных роботизированных платформ, выполненных с возможностью комплектации различными функциональными модулями, устанавливаемыми в зависимости от планируемой боевой задачи: боевым дистанционно-управляемым модулем, транспортным модулем и модулем разведки, при этом каждая универсальная роботизированная платформа оснащена системой навигации и топопривязки и выполнена с возможностью обеспечения перемещения в дистанционном ручном режиме, в полуавтоматическом режиме с движением по траектории, задаваемой оператором, путем ввода географических координат узловых точек маршрута, передачи информации о скорости и направлении движения, углах продольного и поперечного крена и текущих координат, и с движением по траектории, сохраненной ранее при движении в ручном режиме, с возможностью автоматического возвращения в исходную точку по пройденному маршруту и автоматического объезда препятствий, при этом пункт дистанционного управления выполнен с возможностью одновременного или последовательного управления всей группой универсальных роботизированных платформ с любыми из установленных на них функциональными модулями, при этом боевой дистанционно-управляемый модуль выполнен с возможностью обнаружения цели, ее автоматического сопровождения и поражения, с возможностью запоминания в произвольной последовательности нескольких неподвижных целей с последующим автоматическим наведением и открытием огня, модуль разведки выполнен с возможностью обнаружения цели и ее распознавания с определением координат и дальности, а транспортный модуль выполнен с возможностью транспортирования полезной нагрузки и ее фиксации на платформе.
Однако данная система имеет ограниченные функциональные возможности при боевом применении мобильного робототехнического комплекса, обусловленные отсутствием в нем средств воздушной разведки, что отрицательно сказывается на получении данных.
Известен способ автоматического управления наземным робототехническим комплексом (см. 5. Патент РФ на изобретение №2574938, М. кл B25J 5/00, опубл. 10.02.2016), включающий радиообмен между пультом управления и робототехническим комплексом, обеспечение ввода и обработку входной информации, поступающей от бортовых датчиков, вычисление текущей ориентации и местоположения робототехнического комплекса, отличающийся тем, что при потере радиосвязи между пультом управления и робототехническим комплексом осуществляют его автоматический возврат в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий путем реализации на борту робототехнического комплекса базовых алгоритмов движения в заранее неизвестной обстановке по дальнометрическому изображению внешней среды с помощью навигационно-вычислительного блока.
Способ осуществляется посредством автономной роботизированной системы (устройства - см. там же, источник [5]), содержащей пульт управления и робототехнический комплекс, в состав которых входят бортовые датчики, устройство ввода и обработки входной информации, поступающей от упомянутых бортовых датчиков, устройство вычисления текущей ориентации и местоположения робототехнического комплекса, навигационно-вычислительный блок, взаимосвязанные устройство дальнометрической связи и блок памяти с дальнометрическим изображением внешней среды и базовых алгоритмов движения в заранее неизвестной обстановке, с возможностью автоматического возврата робототехнического комплекса (при потере радиосвязи между ним и пультом управления) в точку старта или в зону уверенного радиообмена по ранее пройденной траектории с корректировкой этой траектории в обход обнаруженных препятствий.
Однако устройство для реализации этого способа управления плохо адаптируется к изменяющимся условиям окружающей среды, имеет узконаправленную комплектацию роботами, способными работать в различных физических средах, что ограничивает число решаемых устройством задач.
Наиболее близкой к заявляемому изобретению по назначению и совокупности существенных признаков устройства является мультиагентная автономная робототехническая система (см. 6. Патент США №6990406 В2, М. кл. G06F 19/00, G03B 37/00, опубл. 24.01.2006), содержащая функционально специализированные мобильные роботы с индивидуальными энергетическими установками, двигателями и движителями, по меньшей мере один летательный аппарат и искусственный спутник Земли, входящую в бортовую аппаратуру летательного аппарата систему воздушного слежения за роботами, получения информации от них и командного управления ими в составе приемопередатчика, формирователя изображения зоны действий и связанного с ними модуля планирования индивидуальных маршрутов роботов, а также входящие в бортовую аппаратуру роботов системы собственного управления и наблюдения, связанные бортовыми приемопередатчиками, к которым подключены блок сенсоров и контроллер управления движением мобильного робота, через приемопередатчик летательного аппарата с его системой воздушного слежения, информации и управления.
Принятая за прототип многоагентная автономная робототехническая система включает в себя группу простых базирующихся на поверхности агентов (транспортных средств), управляемых воздушной системой слежения и подачи команд. Последняя включает в себя инструментальный комплекс, используемый для получения изображения зоны действий и любого транспортного средства, находящегося в этой зоне. Данные изображения используются для определения принадлежности транспортного средства, целей для исследования и любых препятствий в зоне действий. Система слежения и подачи команд определяет маршруты движения транспортных средств поверхностного базирования с учетом установленных целей и препятствий и управляет транспортными средствами с помощью простых команд на перемещение в зоне действий с обходом препятствий в сторону установленных целей. Каждое транспортное средство имеет свой собственный инструментальный комплекс для сбора информации о зоне действий и передачи ее системе слежения и подачи команд. Система слежения и подачи команд может быть, в свою очередь, соединена со спутниковой системой для получения дополнительной визуальной информации о зоне действий, передачи информации о местоположении и оперативных команд системе слежения.
Как следует из описания, устройство, принятое за прототип, не позволяет осуществлять гибкое конфигурирование состава и структуры комплекса в соответствии с конкретной оперативно-тактической задачей. Следует отметить и невозможность работы комплекса при мониторинге надводной и подводной обстановки. Кроме того, недостаточны эффективность использования и срок службы мобильного робота при его расположении в зонах высокого риска разрушения.
Все это, в конечном счете, обусловливает недостаточно высокие тактико-технические или технико-эксплуатационные характеристики комплекса (в зависимости от конкретного назначения при рассмотрении объекта как устройства двойного назначения).
Техническим результатом предлагаемого изобретения является улучшение тактико-технических (в приложении к комплексам военного и специального назначения) и технико-эксплуатационных (применительно к комплексам гражданского и научно-исследовательского назначения) характеристик и расширение функциональных возможностей мультиагентной автономной робототехнической системы путем обеспечения гибкого конфигурирования состава и структуры комплекса в соответствии с условиями конкретной решаемой задачи при действии системы на суше, в водной и воздушной средах, получения непрерывной информации о месте работы с многих ракурсов различными датчиками (радиолокационным, телевизионным, инфракрасным и др.), увеличения количества базовых технологий работы с системой, т.е. расширения круга типовых оперативных задач, увеличения эффективности использования и срока службы мобильного робота при его расположении в зонах высокого риска разрушения, обеспечения самоорганизации элементов системы в сетевую структуру, для повышения ее живучести и возможности дублирования систем управления.
Достижение указанного технического результата обеспечивается в мультиагентной робототехнической системе, содержащей мобильные роботы с индивидуальными энергетическими установками, двигателями и движителями, по меньшей мере один летательный аппарат и искусственный спутник Земли, входящие в бортовую аппаратуру летательного аппарата системы воздушного слежения за роботами, получения информации от них и командного управления ими в составе приемопередатчика, формирователь изображения зоны действий и связанный с ним модуль планирования индивидуальных маршрутов роботов, а также входящие в бортовую аппаратуру роботов системы собственного управления и наблюдения, связанные, посредством бортовых приемопередатчиков, к которым подключены также блок сенсоров, контроллер управления бортовой аппаратурой и контроллер управления шасси, с системой воздушного слежения, информации и управления бортовых приемопередатчиков, отличающейся тем, что мобильные роботы представляют собой беспилотные летательные аппараты, сухопутные мобильные роботы, надводные мобильные роботы и подводные мобильные роботы, бортовая аппаратура роботов дополнена блоком системы постановки помех, блоком систем обнаружения, блоком навигационных приемников, блоком передатчиков навигационных сигналов, блоком системы опознавания «свой-чужой», блоком командной радиолинии управления, связанной беспроводной связью с пультом управления, блоком приемопередатчиков связи, выполненным с возможностью осуществления взаимного слежения и обмена текущей информацией, а также определения относительных координат в трехмерном пространстве и их ретрансляции на летательный аппарат через бортовой приемопередатчик робота-посредника из числа мультиагентов, блоком инерциальной навигационной системы и блоком сенсоров, при этом блок системы постановки помех соединен с первым выходом контроллера управления бортовой аппаратурой, блок систем обнаружения соединен со вторым выходом контроллера управления бортовой аппаратурой, блок навигационных преемников соединен с третьим выходом контроллера управления бортовой аппаратурой; блок передатчиков навигационных сигналов соединен с четвертым выходом контроллера управления бортовой аппаратурой; блок системы опознавания «свой - чужой» соединен с пятым выходом контроллера управления бортовой аппаратурой; блок командной радиолинии управления соединен с пультом управления и шестым выходом контроллера управления бортовой аппаратурой; блок приемопередатчиков связи соединен с седьмым выходом контроллера управления бортовой аппаратурой; блок инерциальной навигационной системы соединен с восьмым выходом контроллера управления бортовой аппаратурой, блок сенсоров соединен с девятым выходом контроллера управления бортовой аппаратурой, контроллер управления движением шасси соединен с десятым выходом контроллера управления бортовой аппаратурой.
При этом для расширения диапазона применения роботов путем обеспечения их передвижения как по суше, так и по воде, все мобильные роботы могут быть выполнены наземными, а их движители - сухопутными или амфибийными.
Кроме того, все мобильные роботы могут быть выполнены надводными, а их движители - водоходными или амфибийными.
Все мобильные роботы могут быть выполнены подводными, их движители - водоходными или амфибийными, а бортовые приемопередатчики связи двухкомпонентными, один из которых - гидроакустический с возможностью взаимного обмена информацией между подводными роботами, а другой - радиотехнический с возможностью взаимного обмена информацией, с, по меньшей мере, летательным аппаратом.
Для организации обмена информацией в реальном масштабе времени между всеми компонентами системы, реализации процедуры управления с пульта управления всеми элементами системы, включая СМР, БПЛА, НМР и ПМР, и в ряде случаев повышения скрытности системы путем использования всплывающих над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавков на гибкой привязи, одна часть мобильных роботов может быть выполнена надводными, а другая часть - подводными, при этом их движители - водоходными или амфибийными, бортовые приемопередатчики связи подводных роботов - двухкомпонентными, при этом один компонент - гидроакустическим с возможностью взаимного обмена информацией между всеми роботами-мультиагентами - как подводными, так и надводными в любых сочетаниях, другой компонент - радиотехническим с возможностью взаимного обмена информацией, по меньшей мере, с летательным аппаратом.
Для расширения возможностей по передвижению в различных средах и связи между всеми надводными роботами и всеми подводными роботами посредством радиоаппаратуры на всплывающих над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавках на гибкой привязи, как фрагментов подводных роботов, одна часть мобильных роботов может быть выполнена наземными, а другая часть - надводными, при этом их движители - водоходными или амфибийными соответственно.
Для обеспечения возможности гибкого изменения количества роботов, задействованных в функциях мониторинга при работе в надводном или подводном положении, все мобильные роботы могут быть выполнены надводно-подводными с управляемой плавучестью в диапазоне от положительной до отрицательной, включая нулевую, а их движители - водоходными или амфибийными.
Для получения информации на пульте управления о ситуации или результатах мониторинга в различных физических средах бортовые приемопередатчики роботов могут быть выполнены двухкомпонентными, при этом один компонент - гидроакустическим с возможностью взаимного обмена информацией между всеми роботами-мультиагентами - как в их надводном, так и подводном положениях, другой компонент - радиотехническим с возможностью взаимного обмена информацией, по меньшей мере, с летательным аппаратом, а также между всеми мобильными роботами в надводном их положении, включая всплывающие над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавки на гибкой привязи, как фрагменты подводных роботов, с установленной на них радиоаппаратурой.
Для реализации самоорганизующейся системы связи с роботами, работающими в различных физических средах, мобильные роботы могут быть представлены по меньшей мере тремя взаимосвязанными, посредством сетевой системы их взаимодействия, группами - наземными, надводными и подводными, движители наземных роботов - сухопутными или амфибийными, движители надводных и подводных роботов - водоходными или амфибийными, бортовые приемопередатчики связи подводных роботов - двухкомпонентными, при этом один компонент - гидроакустическим с возможностью взаимного обмена информацией между подводными и надводными роботами в любых сочетаниях, другой компонент - радиотехническим с возможностью взаимного обмена информацией, по меньшей мере, с летательным аппаратом, а также между наземными и надводными роботами и подводными роботами в любом их сочетании посредством радиоаппаратуры на всплывающих над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавках на гибкой привязи, как фрагментов подводных роботов.
Для расширения области применения системы, повышения ее гибкости, путем управления, например, с пульта управления одним из роботов, мультиагентная робототехническая система может дополнительно содержать пульт оператора со своим приемопередатчиком, аналогичным бортовой командной радиолинии управления летательного аппарата, выполненным с возможностью централизованного, децентрализованного или смешанного управления робототехнической системой, а также летательным аппаратом и любым входящим в нее мобильным роботом, с использованием их бортовых приемопередатчиков связи и возможностью трансляции информации от выбранного робота другим роботам с отработкой задающих воздействий (команд управления).
Для концентрации усилий групп роботов путем многократного измерения одного и того же параметра различными роботами однотипной и разнотипной аппаратурой, мобильные роботы могут быть дифференцированы по их специализации группами и/или индивидуально, с соответствующим комплектом бортовой аппаратуры, включая состав блоков сенсоров.
При указанной выше дифференцированности мобильных роботов по их специализации группами и/или индивидуально для обеспечения скрытности действия конкретной группы от роботов противника, в составе мобильных роботов может быть предусмотрен по меньшей мере один дополнительный блок систем постановки помех, мощность и диапазон частот которого превышает мощность и диапазон частот имеющихся блоков постановки помех остальных роботов в группе.
При указанной выше дифференцированности мобильных роботов по их специализации группами и/или индивидуально, для эвакуации вышедшего из строя робота, в составе мобильных роботов может быть предусмотрен по меньшей мере один тягач/буксир со стыковочным узлом для временной механической взаимосвязи с другим мобильным роботом, подлежащим транспортировке в условиях чрезмерного для него сопротивления движению или эвакуации в аварийном состоянии.
При указанной выше дифференцированности мобильных роботов по их специализации группами и/или индивидуально, для дозаправки топливом при израсходовании ими энергобаланса или обеспечения группой роботов-доноров длительной работы робота, функции которого в данный момент являются определяющими, в составе мобильных роботов может быть предусмотрен по меньшей мере один энергетический донор со стыковочным узлом для временного соединения заправочно-зарядных коммуникаций робота-донора и робота-акцептора, выполненный с возможностью дозаправки топливом и/или подзарядки электроэнергией робота-акцептора.
При указанной выше дифференцированности мобильных роботов по их специализации группами и/или индивидуально, для обеспечения возможности проведения регламентного контроля исправности роботов и/или ремонта роботов, вышедших из строя, в составе мобильных роботов может быть предусмотрен по меньшей мере один сервисный робот с ремонтно-диагностическим оборудованием и стыковочным узлом для временного, по меньшей мере, электрического соединения с другим мобильным роботом и выполненный с возможностью диагностики и, по меньшей мере, частичного восстановления, функциональных возможностей робота-пациента.
Среди выявленных в результате проведенных патентных исследований аналогов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной совокупностью признаков. В то же время, именно за счет заявленной совокупности существенных признаков достигается указанный выше новый технический результат.
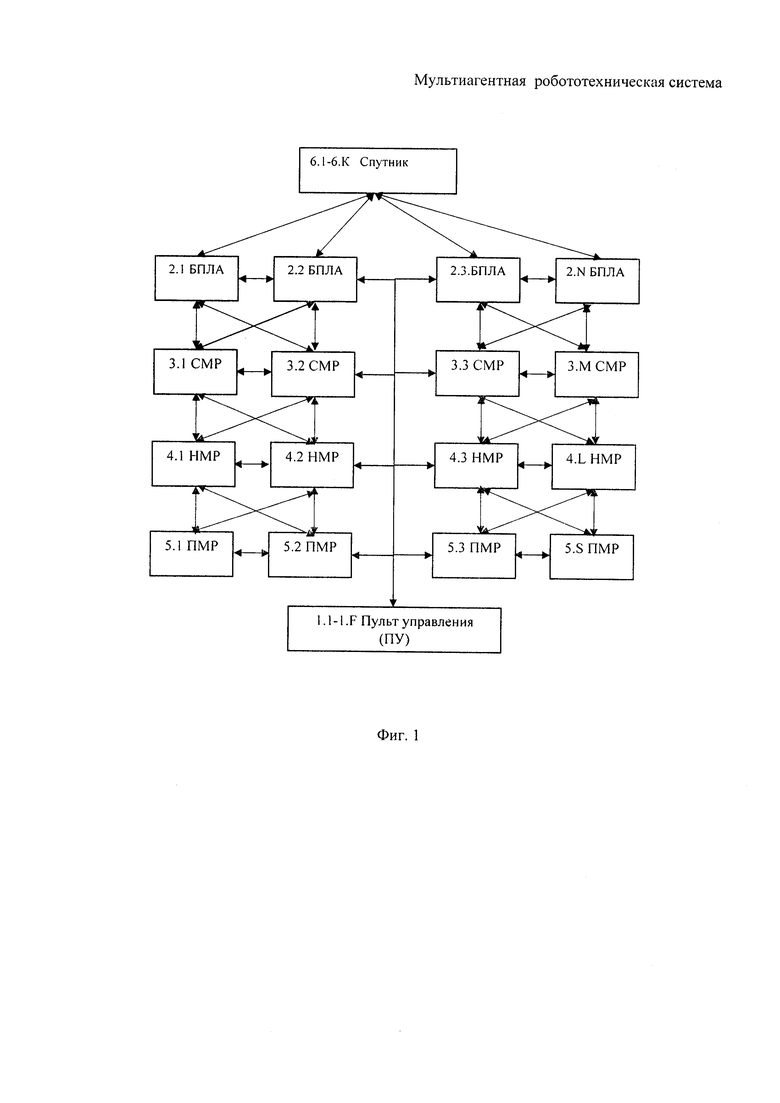
Подробнее сущность изобретения раскрывается в приведенном ниже примере реализации и иллюстрируется чертежами (фиг. 1, 2, 3), где на фиг. 1 показаны:
пульт или пульты 1 управления (ПУ) в количестве от 1 до F (1.1-1.F);
беспилотные летательные аппараты (БПЛА) 2 в количестве от 1 до N (2.1-2.N);
сухопутные мобильные роботы (СМР) 3 в количестве от 1 до М (3.1-3.М);
надводные мобильные роботы (НМР) 4 в количестве от 1 до L (4.1-4.L);
подводные мобильные роботы (ПМР) 5 в количестве от 1 до S (5.1-5.S);
спутник или спутники 6 в количестве от 1 до К (6.1-6.К),
где F, N, М, L, S, К - любые числа из натурального ряда чисел 1, 2, 3,…
На фиг. 1 приведена схема мультиагентной автономной робототехнической системы с управлением оператором или операторами с пульта (пультов) 1 (1.1-1.F), управления с реализацией централизованного смешанного режима работы системы.
Группа беспилотных летательных аппаратов 2 (БПЛА 2.1-2.N) предназначена для осуществления поиска, обнаружения, классификации и измерения параметров движения объектов интереса (дальности, угловых координат, скорости известными методами), мониторинга объектов интереса посредством датчиков измерителей различного типа, организации связи между собой, пультом 1 управления (ПУ1) и другими элементами системы при нахождении БПЛА 2 в воздушной среде.
Группа самоходных мобильных роботов 3 (CMP 3.1-3.S) призвана производить поиск, обнаружение, классификацию и измерение параметров движения объектов интереса (дальности, угловых координат, скорости известными методами), мониторинг объектов интереса посредством датчиков измерителей различного типа, организацию связи между собой, пультом 1 управления (ПУ1) и другими элементами системы при нахождении СМР 3 преимущественно на земной поверхности.
Группа надводных мобильных роботов 4 (НМР 4.1-4М) призвана производить поиск, обнаружение, классификацию и измерение параметров движения объектов интереса (дальности, угловых координат, скорости известными методами), мониторинг объектов интереса посредством датчиков измерителей различного типа, организацию связи между собой, (пунктом) управления 1 (ПУ) и другими элементами системы при нахождении НМР 4 преимущественно в водной среде в надводном положении.
Группа подводных мобильных роботов 5 (ПМР 5.1-5.S) призвана осуществлять поиск, обнаружение, классификацию и измерение параметров движения объектов интереса (дальности, угловых координат, скорости известными методами), мониторинг объектов интереса посредством датчиков измерителей различного типа, организацию связи между собой, пультом 1 управления (ПУ1) и другими элементами системы при нахождении ПМР 5 в водной среде, преимущественно в подводном положении.
Спутник или спутники 6 (6.1-6.К) служит(ат) для обеспечения системы связной, навигационной и иной информацией и представляют собой штатные орбитальные группировки соответствующего назначения.
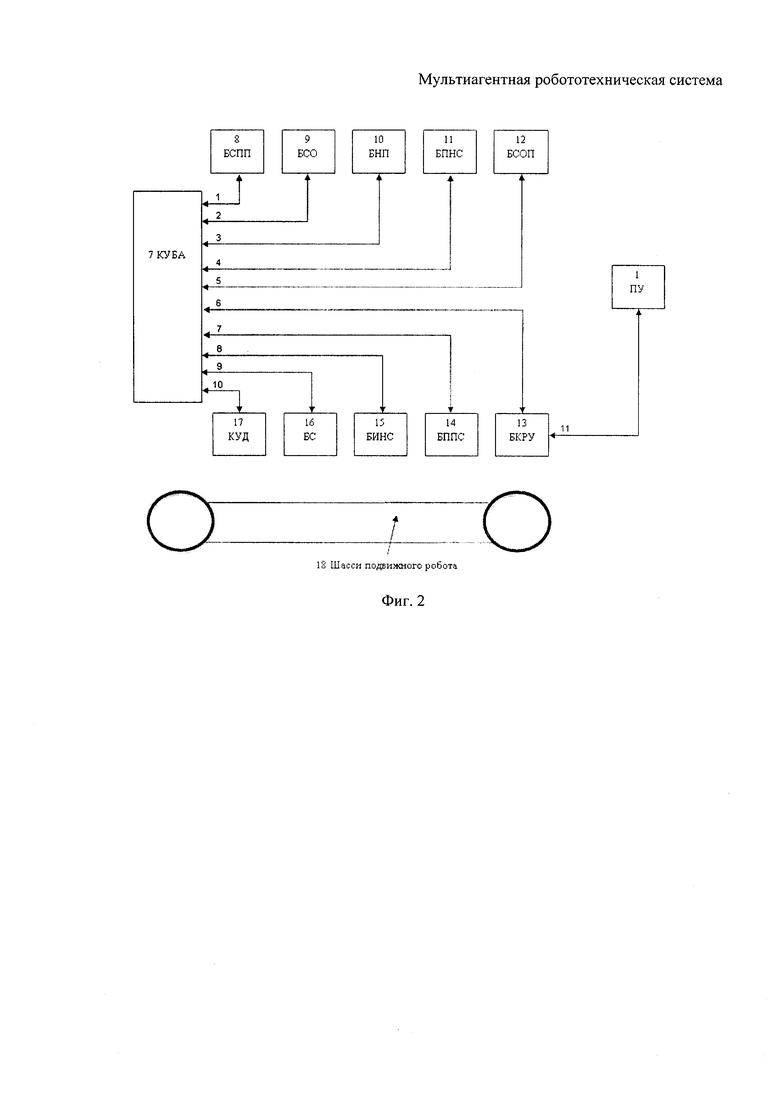
На фиг. 2 представлена блок-схема элементов 3.1-3.М, 4.1-4.L, 5.1-5.S (на фиг. 1 - блоки 3-5) мобильного робота системы, которая идентична для каждого из роботов 2.1 - 2.N, на которой показаны следующие входящие в мобильный робот 2 блоки:
7 - контроллер управления бортовой аппаратурой (КУБА);
8 - блок системы постановки помех (БСПП);
9 - блок систем обнаружения (БСО) в составе блока 8 постановки помех;
10 - блок навигационных преемников (БНП);
11 - блок передатчиков навигационных сигналов (БПНС);
12 - блок системы опознавания «свой - чужой» (БСОП);
13 - блок командной радиолинии управления (БКРУ);
14 - блок приемопередатчиков связи (БППС);
15 - блок инерциальной навигационной системы (БИНС);
16 - блок сенсоров (БС);
17 - контроллер управления движением шасси (КУД);
18 - шасси подвижного робота, под которым подразумеваются: рама или несущий корпус, энергосиловая установка, трансмиссия, ходовая часть с движителем и органы управления).
На фиг. 2 схематически показаны электрические связи между всеми блоками 7-17.
КУБА 7 включен в параллель с каждым из блоков 8-17: при этом первая двунаправленная шина КУБА 7 служит для подключения БСПП 8, вторая двунаправленная шина - для подключения БСО 9, третья двунаправленная шина - для подключения БНП 10, четвертая двунаправленная шина - для подключения БПНС 11, пятая двунаправленная шина - для подключения БСОП 12, шестая двунаправленная шина - для подключения БКРУ 13, седьмая двунаправленная шина - для подключения БППС 14, восьмая двунаправленная шина - для подключения БИНС 15, девятая двунаправленная шина - для подключения БС 16, десятая двунаправленная шина - для подключения КУД 17. Кроме того, БКРУ 13 связан двунаправленной шиной с ПУ1.
Все блоки 7-17 робота связаны с его шасси 18 механически: они установлены на шасси 18.
Согласно фиг. 1, 2 мультиагентная робототехническая система содержит функционально специализированные мобильные роботы 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S с индивидуальными энергетическими установками, двигателями и движителями, установленными на шасси 18 (фиг. 2), по меньшей мере один летательный аппарат (БПЛА) 2 и по меньшей мере один искусственный спутник 6 Земли.
Структура построения бортовой аппаратуры каждого из роботов (2 - 5), согласно фиг. 2, идентична и отличается только массогабаритными характеристиками и спецификой использования блоков 7-18 в соответствующих средах.
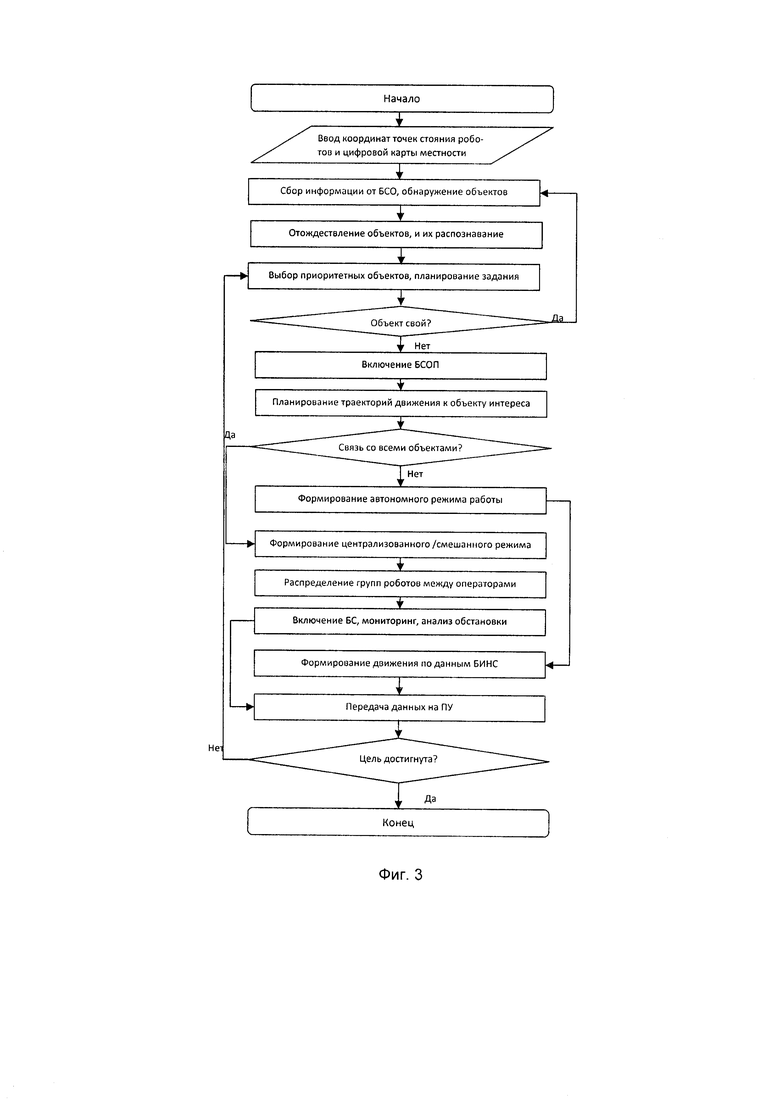
На фиг. 3 приведена блок-схема алгоритма работы пульта или пультов 1 управления (ПУ) в количестве от 1 до F (1.1-1.F).
Рассмотрим функции блоков мультиагентной робототехнической системы.
Пульт (пульты) 1.1-1.F управления (ПУ) формируют команды управления роботами, 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S, при этом на каждый из роботов группы 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S или группу роботов могут формироваться команды управления, которые принимаются блоком командной радиолинии 13 управления (БКРУ), сигналы с выхода которой подаются на шестой вход контроллера 7 управления бортовой аппаратурой 7 (КУБА) и после решения вычислительных процедур с его десятого выхода - на контроллер 17 управления движением (КУД), который, в свою очередь, формирует команды на управление движением шасси 18 подвижного робота.
Блок 9 систем обнаружения (БСО) осуществляет поиск, обнаружение, измерение пространственных координат объектов интереса и взаимное слежение за роботами.
Блок 10 навигационных приемников (БНП) осуществляет прием сигналов систем спутниковой навигации от 6.1-6.К и сигналов блока 11 передатчика навигационных сигналов (БПНС) и осуществляет их пересчет в определенную систему координат, которые подаются посредством третьей двунаправленной шины на контроллер 7 управления бортовой аппаратурой (КУБА).
При пропадании навигационных сообщений от спутников 6 контроллер 7 управления бортовой аппаратурой (КУБА) посредством четвертой двунаправленной шины инициализирует работу блока 11 передатчиков навигационных сигналов (БПНС), которые излучают навигационные сигналы, принимаемые другими роботами системы посредством блока 10 навигационных приемников (БНП).
Блок 12 систем опознавания «свой-чужой» (БСОП), посредством пятой двунаправленной шины контроллера 7 управления бортовой аппаратурой (КУБА), формирует запросные сигналы и принимает ответные сигналы от других роботов системы и определяет принадлежность роботов к своей системе.
Блок 13 командной радиолинии управления (БКРУ), посредством шестой двунаправленной шины КУБА 7 и одиннадцатой двунаправленной шины ПУ 1 принимает команды управления оператора для осуществления движения в заданную точку и выполнения иных операций (включения/выключения/переключения режимов движения и срабатывания бортового спецоборудования).
Блок 14 приемопередатчиков связи (БППС), посредством седьмой двунаправленной шины контроллера 7 управления бортовой аппаратурой (КУБА), осуществляет самоорганизующуюся беспроводную связь между группами роботов для реализации централизованного, децентрализованного и смешанного управления с целью достижения согласованной цели.
Блок 15 инерциальной навигационной системы (БИНС), посредством восьмой двунаправленной шины контроллера 7 управления бортовой аппаратурой (КУБА), формирует координаты путем определения ускорения объекта и его угловых скоростей с помощью установленных на движущемся объекте приборов и устройств, а по этим данным - местоположения (координат) этого объекта, его курса, скорости, пройденного пути и др. Данный блок используется в случае обеспечения блоком постановки помех противодействия системам спутниковой навигации, а его данные могут использоваться в навигационных сообщениях в блоке 11 передатчиков навигационных сигналов (БПНС).
Блок 16 сенсоров (БС), посредством девятой двунаправленной шины контроллера 7 управления бортовой аппаратурой (КУБА), осуществляет мониторинг окружающей среды.
Контроллер 17 управления движением (КУД), посредством десятой двунаправленной шины контроллера 7 управления бортовой аппаратурой (КУБА), формирует команды на управление движением шасси 18 подвижного робота.
Процесс взаимодействия элементов системы мобильных роботов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S заключается в следующем.
Пульт 1 управления формирует команды управления (задание на мониторинг территории), которые принимаются блоком 13 командной радиолинии управления (БКРУ) робота, выбранного в качестве головного узла. Принимаемые БКРУ 13 команды поступают посредством шестой двунаправленной шины на КУБА 7, а с помощью десятой двунаправленной шины - на КУД 17, который инициализирует команды на управление движением шасси 18 подвижного робота. Контроллер 7 управления бортовой аппаратурой (КУБА) инициирует работу БППС 14, который транслирует команды оператора на другие роботы групп 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S, также посредством БППС 14 осуществляет обмен информацией, получаемой БС 16, БСО 9 решает задачи поиска, обнаружения, измерения координат объектов интереса и осуществляет взаимное слежение за роботами группы. Навигационные сообщения, транслируемые спутником(ами) 6.1-6.К, принимаются БНП 10, и вычисленные значения местоположения мобильного робота поступают посредством третьей двунаправленной шины на КУБА 7. Если посредством БСО 9 обнаружен объект интереса, то КУБА 7 инициирует работу БСОП 12. В случае если обнаруженный объект не относится к роботам группы, то КУБА 7 инициирует работу БСПП 8. При невозможности приема БНП 10 сигналов от спутников 6.1-6.К робот переходит в режим получения данных от БИНС 15, или часть роботов производит включение БПНС 11 для формирования локального радионавигационного поля.
Главное конструктивное отличие заявляемой мультиагентной робототехнической системы заключается в том, что бортовая аппаратура роботов (блоки 3-5) дополнена системами взаимного слежения посредством БСО 9 и обмена текущей информацией путем передачи данных блоками БППС 14, выполненными с возможностью определения относительных координат в трехмерном пространстве, посредством БНП 10, БПНС 11 и БППС 14 и их ретрансляции на БПЛА 2.1-2.N через БППС 14 робота-посредника из числа мультиагентов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S.
В общем случае, мобильные роботы представлены (см. фиг. 1) тремя взаимосвязанными, посредством сетевой системы их взаимодействия, группами - наземными 3, надводными 4 и подводными 5. Движители (установленные на шасси 18) наземных роботов 3 представлены сухопутными или амфибийными, движители надводных 4 и подводных 5 роботов - водоходными или амфибийными. Блоки 14 приемопередатчиков связи (БППС 14) подводных роботов представлены двухкомпонентными, при этом один компонент - гидроакустический, выполненный с возможностью взаимного обмена информацией между подводными 5 и надводными 4 роботами в любых сочетаниях, другой компонент - радиотехнический, выполненный с возможностью взаимного обмена информацией, по меньшей мере, с БПЛА 2 (в любых сочетаниях) между наземными 3 и надводными 4 роботами и подводными 5 роботами посредством радиоаппаратуры на всплывающих над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавках на гибкой привязи, как фрагментов подводных роботов 5.
Бортовая аппаратура мобильных роботов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S может дополнительно содержать подключенный к контроллеру 7 управления бортовой аппаратурой блок 11 передачи навигационных сигналов (БПНС) для формирования локального радионавигационного поля.
Мультиагентная система может дополнительно содержать (предпочтительный частный случай заявляемой мультиагентной системы) операторский пульт 1 (мобильный или стационарный пункт с пультом 1) управления (ПУ 1) со своим приемопередатчиком, аналогичным бортовому приемопередатчику (1.1-1.F) блока 13 командной радиолинии управления (БКРУ) у роботов, выполненный с возможностью централизованного, параллельно-альтернативного дистанционного управления системой, равно как летательным аппаратом 2 и любым входящим в систему мобильным роботом 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S, с использованием их БППС 14.
Рекомендуется также, чтобы мобильные роботы 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S были дифференцированы по их специализации группами и/или индивидуально, с соответствующим комплектом бортовой аппаратуры, включая блоки 16 сенсоров (БС).
При этом предлагается, чтобы в числе мобильных роботов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S были предусмотрены, по меньшей мере, в единичном количестве:
1) тягач/буксир со стыковочным узлом для временной механической взаимосвязи с другим мобильным роботом 3.1-3.М, 4.1-4.L, 5.1-5.S, подлежащим транспортировке в условиях чрезмерного для него сопротивления движению или эвакуации в аварийном состоянии;
3) энергетический донор со стыковочным узлом для временного соединения заправочно-зарядных коммуникаций робота-донора и робота-акцептора (из числа роботов 3.1-3.М, 4.1-4.L, 5.1-5.S), и возможностью дозаправки топливом и/или подзарядки электроэнергией;
4) сервисный робот с ремонтно-диагностическим оборудованием и стыковочным узлом для временного, по меньшей мере, электрического соединения с другим мобильным роботом (из числа роботов 3.1-3.М, 4.1-4.L, 5.1-5.S) и возможностью диагностики и, по меньшей мере, частичного восстановления, функциональных возможностей робота-пациента (из числа роботов 3.1-3.М, 4.1-4.L, 5.1-5.S).
Заявляемая мультиагентная робототехническая система обладает следующими особенностями устройства и функционирования.
Управление мультиагентной автономной робототехнической системой осуществляется с пульта 1 управления (ПУ) или пультов 1 (1.1-1.F) управления оператором или операторами, реализуя централизованный, децентрализованный или смешанный режим работы системы. При этом каждый ПУ 1 содержит необходимый набор предустановленного программного обеспечения (фиг. 3) для управления системой, многоканальное приемопередающее устройство для связи с объектами системы и аналогичными пультами 1 управления, цифровые карты местности и органы управления и отображения. Управление системой может осуществляться как с одного ПУ 1 посредством робота, выбранного (из числа мультиагентов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S) в качестве основного, так и роботами 3.1-3.М, 4.1-4.L, 5.1-5.S по типовому назначению (СМР, ПМР, НМР, БПЛА). Команды управления могут транслироваться на один из роботов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S и далее на другие роботы 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S системы, реализуя смешанный алгоритм управления. Информация от роботов 2.1-2.N, 3.1-3.М, 4.1-4.L, 5.1-5.S поступает на ПУ 1, где она отождествляется и где формируется единая модель отображения зоны действия мультиагентной системы.
Каждый из БПЛА 2 (2.1-2.N), как и мобильные роботы (СМР 3.1-3.N, ПМР 4.1-4.N, НМР 5.1-5.N содержит: 7 - контроллер управления бортовой аппаратурой (КУБА); 8 - блок системы постановки помех (БСПП); 9 - блок систем обнаружения (БСО); 10 - блок навигационных преемников (БНП); 11 - блок передатчиков навигационных сигналов (БПНС); 12 - блок системы опознавания «свой - чужой» (БСОП); 13 - блок командной радиолинии управления (БКРУ); 14 - блок приемопередатчиков связи (БППС); 15 - блок инерциальной навигационной системы (БИНС); 16 - блок сенсоров (БС); 17 - контроллер управления движением ЛА (КУД); 18 - комплекс устройств, аналогичный шасси роботов, а именно, корпус, крылья и хвостовое оперение с органами управления, ходовая часть шасси с опорными элементами; движителем в воздушной среде и, возможно движителем колес опорных элементов. Назначение шасси 18, роботов и БПЛА 2 - размещение и транспортировка полезной нагрузки (спецоборудования).
БПЛА 2 (2.1-2.N), как совокупность их шасси 18 и полезной нагрузки, решают следующие задачи: контроль объектов различной инфраструктуры; наблюдение за состоянием объектов; высокоточное картирование больших земельных участков, а также проведение физических и химических обследований почвы (растительности), ретрансляция сигналов связи, и команд управления роботами (СМР 3.1-3.N, ПМР 4.1-4.N), сбор данных от этих роботов и др.
Каждый из самоходных мобильных роботов (СМР) 3 (3.1-3.М) содержит блок 9 систем обнаружения (БСО), которые могут комплектоваться различными типами датчиков: радиолокационными, инфракрасными, телевизионными др. типами датчиков, информация от которых по линиям связи поступает на пульт 1 управления (ПУ), где происходит ее отождествление.
Блок 9 БСО управляется от контроллера 7 управления бортовой аппаратурой (КУБА).
Блок 8 системы постановки помех (БСПП) входит в систему постановки помех и включает в себя устройство постановки помех в различных спектральных диапазонах, причем по крайней мере на одном из СМР 3 (узко специализированном «постановщике помех» группы роботов) может размещаться блок БСПП, аналогичный упомянутым блокам 8, но с существенно большей мощностью и более широким частотным диапазоном. Например, один «постановщик помех» - с БСПП 8 радиолокационного диапазона, другой - оптического и др. На НМР 4 и ПМР 5 могут располагаться блоки постановки помех гидроакустическим системам.
БППС 14 (блок приемопередатчиков связи) содержит приемопередатчик связи со спутником, между СМР 3, между СМР 3 и БПЛА 1, между СМР 3 и НМР 4, между НМР 4 и БПЛА 2. Система связи может образовывать сетевую самоорганизующуюся структуру, которая управляется от контроллера 7 управления бортовой аппаратурой.
Блок 16 сенсоров (БС) включает в себя системы мониторинга различного типа. Например, на СМР 3 и БПЛА 2 могут быть установлены газоанализаторы, датчики радиации и др.
БС 16, размещенный на НМР 4 и ПМР 5, включает в себя системы мониторинга различного типа. Например, в нем могут быть установлены датчики загрязнения воды и биологически опасных веществ. Также могут использоваться иные датчики контроля гидрологических и физико-химических параметров качества воды, температуры воды, концентрации соли в воде, ионной формы металлов в водной среде, концентрации основных загрязнений вод, включая гербициды, инсектициды, фенолы, бензпирен и др.
В блоке 15 инерциальной навигационной системы (БИНС) в БПЛА 2.1-2.N могут использоваться гироскопы, датчики угловых скоростей, акселерометры и др., в СМР 3.1-3.М могут использоваться одометры, инклинометры, гироскопы и др., в НМР 4.1-4.L - измерители скорости судна, глубиномеры, гироскопы, в ПМР 5.1-5.S - измерители скорости судна, гироскопы, глубиномеры.
В бортовую аппаратуру БПЛА 2 входит система воздушного слежения за роботами 3-5, получения информации от них и командного управления ими. В ее составе находятся: БСО 9, контроллер 7 управления бортовой аппаратурой (КУБА), который решает задачи формирования изображения зоны действий и планирования индивидуальных маршрутов роботов 3.1-3.М и 4.1-4.L. Состав блоков, входящих в БПЛА 2, и связи между ними аналогичны составу и взаимосвязи блоков роботов.
Дальнейшее описание относится к дополнительным конструктивным признакам устройства, которые необязательны, но рекомендуются как рациональные, усиливающие полезный технический результат (положительный эффект от использования).
По первому возможному частному выполнению системы, все мобильные роботы выполнены наземными 3, а их движители - сухопутными или амфибийными.
По второму возможному частному выполнению системы, все мобильные роботы выполнены надводными 4, а их движители - водоходными или амфибийными.
По третьему возможному частному выполнению системы, все мобильные роботы выполнены подводными 5, их движители - водоходными или амфибийными, а БППС 14 - двухкомпонентными, при этом один компонент - гидроакустический, выполненный с возможностью взаимного обмена информацией между подводными роботами 5, а другой компонент - радиотехнический, выполненный с возможностью взаимного обмена информацией, по меньшей мере, с БПЛА 2 и размещением на всплывающих над поверхностью воды по команде поплавках на гибкой привязи, как фрагментов роботов-мультиагентов 5.
По четвертому возможному частному выполнению системы, одна часть мобильных роботов выполнена надводными 4, а другая часть - подводными 5, при этом их движители - водоходными или амфибийными, БППС 14 подводных роботов 5 - двухкомпонентными, при этом один компонент - гидроакустический, выполненный с возможностью взаимного обмена информацией между всеми роботами-мультиагентами - как подводными 5, так и надводными 4 в любых сочетаниях, другой компонент - радиотехнический, выполненный с возможностью взаимного обмена информацией, по меньшей мере, с БПЛА 2, между всеми надводными роботами 4 и всеми подводными роботами 5 посредством радиоаппаратуры на всплывающих над поверхностью воды по команде поплавках на гибкой привязи, как фрагментов подводных роботов 5.
По пятому возможному частному выполнению системы, одна часть мобильных роботов выполнена наземными 3, а другая часть - надводными 4, при этом их движители - водоходными или амфибийными.
По шестому возможному частному выполнению системы, все мобильные роботы выполнены надводно-подводными с управляемой плавучестью в диапазоне от положительной до отрицательной, включая нулевую, а их движители - водоходными или амфибийными.
В шестом частном выполнении БППС 14 роботов 3-5 двухкомпонентны, при этом один компонент - гидроакустический, выполненный с возможностью взаимного обмена информацией между всеми роботами-мультиагентами 3-5 - как в их надводном, так и подводном положениях, другой компонент - радиотехнический, выполненный с возможностью взаимного обмена информацией, по меньшей мере, с БПЛА 2 и между всеми мобильными роботами 3-5 в надводном их положении, включая всплывающие над поверхностью воды, по команде с бортовых приемопередатчиков мобильных роботов, поплавки на гибкой привязи, как фрагменты подводных роботов 5, с установленной на них радиоаппаратурой.
БПЛА 2 с размещенными на них датчиками БСО 9 производят мониторинг поверхности Земли (суши и воды), обнаруживают объекты интереса и передают данные в пункт 1 управления, где с использованием программного обеспечения (фиг. 3) производится оптимизация прокладки маршрутов СМР 3 и НМР 4. Так, для СМР 3 прокладываются оптимальные траектории движения (объезд препятствий, завалов и пр.) и эти данные подаются в контроллер 17 управления движением.
Часть СМР 3 и НМР 4 может быть оснащена дополнительными источниками энергии (АКБ, топливом и пр.) для оказания сервисных услуг другим роботам-мультиагентам группы.
Часть роботов 3-5 оснащена передатчиками (в составе БСО 9) для формирования локального радионавигационного поля, которое используется для координатометрии при пропадании сигналов спутниковых навигационных систем. В этом случае часть роботов 3-5 по выбору программного обеспечения, имеющих лучший геометрический фактор, прекращает движение, а их координаты становятся опорными для расчета радионавигационного поля.
При пропадании связи с ПУ 1 программное обеспечение (фиг. 3) роботов 3-5 позволяет реализовать децентрализованную стратегию управления.
Таким образом, имеются находящиеся в причинно-следственной связи с достаточно подробно описанными существенными конструктивными признаками технические результаты:
- обеспечиваются дополнительные возможности гибкого конфигурирования состава и структуры комплекса в соответствии с условиями конкретной решаемой задачи при действии системы на суше, водной и воздушных средах;
- обеспечиваются возможности получения непрерывной информации о месте работы с многих ракурсов различными датчиками (радиолокационным, телевизионным, инфракрасным и др.);
- увеличивается количество базовых технологий работы с системой, т.е. расширяется круг типовых оперативных задач;
- увеличивается эффективность использования и срок службы мобильного робота при его расположении в зонах высокого риска разрушения;
- обеспечивается возможность самоорганизации элементов системы в сетевую структуру, что позволяет повысить ее живучесть и возможность дублирования систем управления.
В результате использование предлагаемого устройства позволяет улучшить тактико-технические (в приложении к комплексам военного и специального назначения) и технико-эксплуатационные (применительно к комплексам гражданского и научно-исследовательского назначения) характеристики и расширить функциональные возможности мультиагентной автономной робототехнической системы.
Блок 8 систем постановки помех (БСПП) может быть выполнен (см. 7. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление каналов систем управления оружием / под. Ред. Ю.М. Перунова. - М.: радиотехника, 2003. - 416 с. - С. 174., рис. 6.22), постановщик помех оптического диапазона может быть выполнен как в источнике (см. 8. Патент РФ №2184982. М.Кл. G01S 7/36. Станция постановки модулированных помех оптико-электронным приборам, опубл. 10.07.2002).
Блок 9 систем обнаружения (БСО) при комплектовании радиолокационными системами обнаружения может быть выполнен (см. 9. Патент РФ на полезную модель №140847. Мобильная малогабаритная трехкоординатная РЛС (варианты). М. кл. G01S 13/00, 20.05.2014), при комплектовании инфракрасными системами обнаружения может быть выполнен (см. 10. Патент РФ на изобретение №2129293. Прибор инфракрасного наблюдения. М. кл. G02B 23/12, G01S 17/00, F41G 1/35, F41G 1/36, опубл. 20.04.1999], при комплектовании телевизионными системами обнаружения может быть выполнен (см. 11. Патент РФ №2365853. М.Кл. F41G 7/00. Переносная оптико-электронная система, опубл. 27.08.2009).
Блок 10 навигационных преемников (БНП) может быть выполнен (см. 12. Электронный ресурс URL http://www.irz.ru/products/12/262.htm/ режим доступа свободный с экрана. Дата обращения 21.07.2016).
Блок 11 передатчиков навигационных сигналов (БПНС) может быть выполнен (см. 13. Патент РФ на изобретение №2558668. Передатчик навигационного сигнала и способ генерации навигационного сигнала. М. кл. G01S 19/10, опубл. 10.08.2015].
Блок 12 систем опознавания «свой-чужой» (БСОП) может быть выполнен (см. 14. Патент РФ на изобретение №2191403. М. кл. G01S 13/78, G01S 13/74. Система опознавания "свой-чужой", опубл. 20.10.2002).
Блок 13 командной радиолинии управления (БКРУ) может быть выполнен (см. 15. Патент РФ на изобретение №2548173. Цифровой модем командной радиолинии ЦМ КРЛ. М. кл. Н04 В 7/00, опубл. 20.04.2015).
Блок 14 приемопередатчиков связи (БППС) может быть выполнен (см. 16. Малогабаритная станция спутниковой связи Р-438 «Барьер Т» http://nevskii-bastion.ru/barier-t/].
Блок 15 инерциальной навигационной системы (БИНС) применительно к БПЛА 2 может быть выполнен, например (см. 17. Бесплатформенная инерциальная навигационная система БИНС-500 http://www.optolink.ru/ru/katalog/katalog/besplatformennye-inercialnye-navigacionnye-sistemy), применительно в НМР и ПМР (см. 18. Морская бесплатформенная инерциальная навигационная система БИНС-500М. http://www.optolink.ru/ru/katalog/katalog/besplatformennye-inercialnye-navigacionnye-sistemy), применительно к СМР (см. 18. Бесплатформенная инерциальная навигационная система БИНС-500НС http://xlab-ns.ru/produkcija/aviacionnoe-oborudovanie/bins-500ns/).
Блок 16 сенсоров (БС) может включать в свой состав газоанализаторы (см. 19. Патент РФ на изобретение №2408007. М. кл. G01N 27/12. Портативный газоанализатор, опубл. 27.12.2010), датчики радиации (см. 20. Дозиметр-радиометр МКС-05 «ТЕРРА». Руководство по эксплуатации ФВКМ.412152.003РЭ] или [Дозиметр SOEKS 01М Сертификат ISO 9001).
Контроллер 7 управления бортовой аппаратурой и контроллер 17 управления шасси могут быть выполнены на базе микрокомпьютеров (см. 21. Intel® NUC5i5MYHE 2.3GHz i5-5300U BGA1168 UCFF Black, Silver, http://www.intel.ru/content/www/ru/ru/nuc/overview.html], или на встраиваемых компьютерах (см. 22. http://www.fastwel.ru/products/vstraivaemye-sistemy/micropc/].
Пульт(ы) 1 управления (ПУ) может быть выполнен также на базе микрокомпьютеров (см. 22. Intel® NUC5i5MYHE 2.3GHz i5-5300U BGA1168 UCFF Black, Silver http://www.intel.ru/content/www/ru/ru/nuc/overview.html), либо (в случае его размещения вне робота) (см. 23. Н. Гамазов. Система управления мобильного робототехнического комплекса МРК-47БТ военного назначения / Н. Гамазов, В. Коровкин // Современные технологии автоматизации. - 2014. - №1. - С. 44-58).
Шасси 18 подвижного робота может быть выполнено в следующих конкретных частных случаях, например на базе шасси основного танка или боевой машины поддержки танков (БМПТ), с возможным использованием наработок по «командной управляемости» и воплощенных в специальных танковых информационно-управляющих системах для слаженного действия в группах танков (см. 24. Основные танки - см. Основные боевые танки / Курков Б.А., Мураховский В.И., Сафонов Б.С./ Под ред. Сафонова Б.С. и Мураховского В.И. - М.: Арсенал-Пресс, 1993. - 192 с. - С. 30-31, 63-77; БМПТ - см. 25. В.Б. Домнин, Н.А. Молодняков, В.М. Неволим Концепция развития системы боевых и обеспечивающих машин сухопутных войск// РАРАН Актуальные проблемы защиты и безопасности. Бронетанковая техника и вооружение: Труды Одиннадцатой Всероссийской научно-практической конференции. - СПб: НПО Специальных материалов, 2008. - Т. 3. - С. 112-116; см. 26. Объект 199: Материал из Википедии - Свободной энциклопедии. - гл. История создания. Разработка, абз. 3. Доступно на https://ru.wikipedia.org/wiki/ %D0%9E%D0%B1%D1%8A%D0%B5%D0%BA%D1%82_199).
Транспортеры - для доставки меньших по габаритам агентов к месту эксплуатации, выполнения функций ретранслятора или временного командного пункта, в том числе на базе плавающих военно-транспортных гусеничных или полноприводных колесных машин (см 27. А.В. Карпенко. Обозрение отечественной бронетанковой техники / СПб.: Невский Бастион, 1996. - С. 100-113).
Агенты - легкие шасси, разработанные под задачу. При работе на пересеченной местности - гусеничные и колесно-шагающие платформы. При эксплуатации в помещениях, на аэродромах и др. могут быть и сферические роботы (см. 28. Патент РФ на полезную модель №106215. М. кл. B62D 57/00, Робот-шар, опубл. 10.07.2011; см. 29. Юрий Пошалок. WORDLS of TANKS. Стальные шары Сталина. Конструирование и производство. - TACTICAL PRESS, 2014. - С. 79-81) и др.
В качестве БПЛА 2 могут использоваться аппараты (см. 30. http://www.missiles.ru/ENIKS_new-2011.htm].
В качестве НМР 4 могут использоваться аппараты (см. 31 http://robotrends.ru/robopedia/katalog-nadvodnyh-voennyh-robotov).
В качестве ПМР 5 могут использоваться аппараты (см. 31 http://www.tetis-pro.ru/catalog/delfin/).
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| СПОСОБ ПАРАЛЛЕЛЬНОЙ РАСПРЕДЕЛЁННОЙ РАБОТЫ ГРУППЫ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ПРИ РЕШЕНИИ ЗАДАЧИ РАСПОЗНАВАНИЯ МНОЖЕСТВА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2024 |
|
RU2828320C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Мобильный робототехнический комплекс | 2023 |
|
RU2836437C2 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
Изобретение относится к мультиагентным робототехническим системам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах в различных природных средах: наземной, воздушной, надводной и подводной. Система содержит мобильные роботы с индивидуальными энергетическими установками, двигателями и движителями, летательный аппарат ЛА и искусственный спутник Земли. В бортовую аппаратуру ЛА входят системы воздушного слежения за роботами, получения информации от них и командного управления ими, формирователь изображения зоны действий и связанного с ними модуля планирования индивидуальных маршрутов роботов. В бортовую аппаратуру роботов входят системы собственного управления и наблюдения, системы взаимного слежения и обмена текущей информацией, выполнен с возможностью определения относительных координат в трехмерном пространстве и их ретрансляции на ЛА посредством бортового приемопередатчика робота-посредника из числа мультиагентов - роботов. Использование предлагаемой системы позволяет улучшить тактико-технические и технико-эксплуатационные характеристики и расширить функциональные возможности системы. 14 з.п. ф-лы, 3 ил.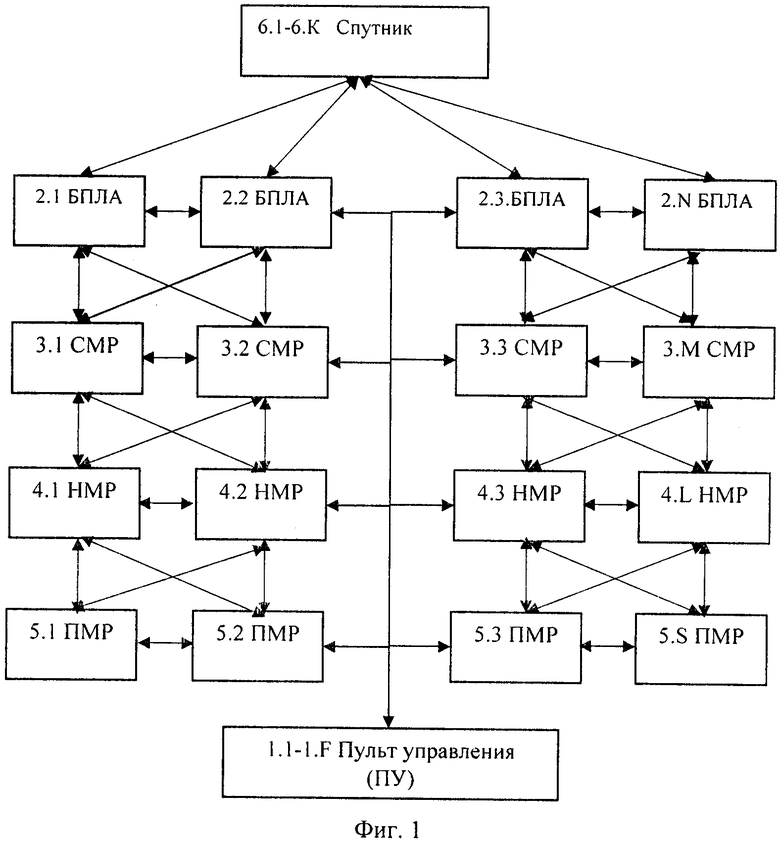
1. Мультиагентная робототехническая система, содержащая мобильные роботы с индивидуальными энергетическими установками, двигателями и движителями, по меньшей мере один летательный аппарат и искусственный спутник Земли, входящие в бортовую аппаратуру летательного аппарата системы воздушного слежения за роботами, получения информации от них и командного управления ими в составе приемопередатчика, формирователь изображения зоны действий, связанный с ним модуль планирования индивидуальных маршрутов роботов и входящие в бортовую аппаратуру роботов системы собственного управления и наблюдения, связанные посредством бортовых приемопередатчиков, к которым подключены блок сенсоров, контроллер управления бортовой аппаратурой и контроллер управления шасси, с системой воздушного слежения, информации и управления бортовых приемопередатчиков, отличающаяся тем, что она содержит мобильные роботы в виде беспилотных летательных аппаратов, сухопутных мобильных роботов, надводных мобильных роботов и подводных мобильных роботов, бортовая аппаратура которых дополнена блоком системы постановки помех, блоком систем обнаружения, блоком навигационных приемников, блоком передатчиков навигационных сигналов, блоком опознавания «свой-чужой», блоком командной радиолинии управления, связанной беспроводной связью с пультом управления, блоком приемопередатчиков связи, выполненным с возможностью осуществления взаимного слежения, обмена текущей информацией, определения относительных координат в трехмерном пространстве и их ретрансляции на по меньшей мере один летательный аппарат через бортовой приемопередатчик робота-посредника из числа мультиагентов, блоком инерциальной навигационной системы и блоком сенсоров, при этом в мобильных роботах блок системы постановки помех соединен с первым выходом контроллера управления бортовой аппаратурой, блок систем обнаружения соединен со вторым выходом контроллера управления бортовой аппаратурой, блок навигационных преемников соединен с третьим выходом контроллера управления бортовой аппаратурой, блок передатчиков навигационных сигналов соединен с четвертым выходом контроллера управления бортовой аппаратурой, блок системы опознавания «свой-чужой» соединен с пятым выходом контроллера управления бортовой аппаратурой, блок командной радиолинии управления соединен с пультом управления и шестым выходом контроллера управления бортовой аппаратурой, блок приемо-передатчиков связи соединен с седьмым выходом контроллера управления бортовой аппаратурой, блок инерциальной навигационной системы соединен с восьмым выходом контроллера управления бортовой аппаратурой, блок сенсоров соединен с девятым выходом контроллера управления бортовой аппаратурой, контроллер управления движением шасси соединен с десятым выходом контроллера управления бортовой аппаратурой.
2. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что движители наземных мобильных роботов выполнены сухопутными или амфибийными.
3. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что движители надводных мобильных роботов выполнены водоходными или амфибийными.
4. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что движители подводных мобильных роботов выполнены водоходными или амфибийными, а бортовые приемопередатчики - двухкомпонентными, один из которых - гидроакустический с возможностью взаимного обмена информацией между подводными роботами, а другой - радиотехнический с возможностью взаимного обмена информацией, с по меньшей мере одним летательным аппаратом.
5. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что движители надводных мобильных роботов выполнены водоходными, а движители подводных мобильных роботов - амфибийными, причем бортовые приемопередатчики подводных роботов выполнены двухкомпонентными, при этом один компонент выполнен гидроакустическим с возможностью взаимного обмена информацией между всеми роботами-мультиагентами подводными и надводными в любых сочетаниях, а другой компонент - радиотехническим с возможностью взаимного обмена информацией по меньшей мере с одним летательным аппаратом, и между всеми надводными роботами и всеми подводными роботами посредством радиоаппаратуры на всплывающих над поверхностью воды по команде поплавках на гибкой привязи.
6. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что движители наземных мобильных роботов выполнены водоходными, а движители надводных мобильных роботов - амфибийными.
7. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что она содержит надводно-подводные мобильные роботы с управляемой плавучестью в диапазоне от положительной до отрицательной, включая нулевую, движители которых выполнены водоходными или амфибийными соответственно.
8. Мультиагентная робототехническая система по п. 1 или 7, отличающаяся тем, что бортовые приемопередатчики роботов выполнены двухкомпонентными, при этом один компонент выполнен гидроакустическим с возможностью взаимного обмена информацией между всеми роботами-мультиагентами в надводном и подводном их положениях, а другой компонент - радиотехническим с возможностью взаимного обмена информацией по меньшей мере с одним летательным аппаратом, и между всеми мобильными роботами в надводном их положении посредством радиоаппаратуры на всплывающих над поверхностью воды по команде с бортовых приемопередатчиков мобильных роботов поплавках на гибкой привязи.
9. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что наземные, надводные и подводные мобильные роботы взаимосвязаны посредством сетевой системы их взаимодействия, движители наземных роботов выполнены сухопутными или амфибийными, движители надводных и подводных роботов - водоходными или амфибийными, причем бортовые приемопередатчики подводных роботов выполнены двухкомпонентными, при этом один компонент выполнен гидроакустическим с возможностью взаимного обмена информацией между подводными и надводными роботами в любых сочетаниях, а другой компонент - радиотехническим с возможностью взаимного обмена информацией по меньшей мере с одним летательным аппаратом, и между наземными и надводными роботами и подводными роботами в любом их сочетании посредством радиоаппаратуры на всплывающих над поверхностью воды по команде поплавках на гибкой привязи.
10. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что бортовая аппаратура мобильных роботов дополнительно содержит подключенный к контроллеру управления бортовой аппаратурой передатчик для формирования локального радионавигационного поля с использованием в качестве радиомаяков группы мобильных роботов.
11. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что она дополнительно содержит несколько пультов оператора со своим приемопередатчиком, аналогичным бортовому приемопередатчику летательного аппарата, выполненный с возможностью централизованного, параллельно-альтернативного дистанционного управления летательным аппаратом с использованием его бортового приемопередатчика и возможностью трансляции информации от выбранного робота другим роботам с отработкой команд управления.
12. Мультиагентная робототехническая система по п. 1, отличающаяся тем, что мобильные роботы дифференцированы по их специализации группами и/или индивидуально, с соответствующим комплектом бортовой аппаратуры, включая состав блоков сенсоров.
13. Мультиагентная робототехническая система по п. 1 или 12, отличающаяся тем, что в составе мобильных роботов предусмотрен по меньшей мере один тягач/буксир с относительно мощной энергетической установкой, двигателем и стыковочным узлом для временной механической взаимосвязи с другим мобильным роботом, подлежащим транспортировке в условиях чрезмерного для него сопротивления движению или эвакуации в аварийном состоянии.
14. Мультиагентная робототехническая система по п. 1 или 12, отличающаяся тем, что в составе мобильных роботов предусмотрен по меньшей мере один энергетический донор со стыковочным узлом для временного соединения заправочно-зарядных коммуникаций робота-донора и робота-акцептора, выполненный с возможностью дозаправки топливом и/или подзарядки электроэнергией робота-акцептора.
15. Мультиагентная робототехническая система по п. 1 или 12, отличающаяся тем, что в составе мобильных роботов предусмотрен по меньшей мере один сервисный робот с ремонтно-диагностическим оборудованием и стыковочным узлом для временного, по меньшей мере электрического, соединения с другим мобильным роботом, выполненный с возможностью диагностики и, по меньшей мере частичного, восстановления функциональных возможностей робота-пациента.
| US 6990406 B2, 24.01.2006 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |

