Область техники, к которой относится изобретение
Настоящее изобретение относится к электрическому зажимному устройству, обеспечивающему возможность зажатия обрабатываемой детали, например, на линии автоматизированной сборки.
Предпосылки создания изобретения
До настоящего времени на линии автоматизированной сборки для автомобилей на этапе сборки сварка формованных панелей кузова одной с другой осуществляется в состоянии их фиксации во взаимно совмещенном состоянии с помощью зажимного устройства.
Заявителем настоящего изобретения предлагается электрическое зажимное устройство, раскрываемое в выложенной заявке на патент Японии, опубликованной под №2005-169604. В этом электрическом зажимном устройстве на корпусе, снабженном электродвигателем, с возможностью свободного поворота установлен зажимной рычаг, который в результате своего поворота под действием движущей силы вращения электродвигателя, передаваемой через редукторную систему, обеспечивает зажатие обрабатываемой детали.
Сущность изобретения
Целью настоящего изобретения является создание электрического зажимного устройства с возможностью обеспечения улучшения технического обслуживания, а также простоты изменения движущей силы этого электрического зажимного устройства.
Для достижения указанной цели в настоящем изобретении предлагается электрическое зажимное устройство для захвата обрабатываемой детали в результате поворота зажимного рычага, содержащее:
корпус;
блок привода, включающий в себя источник движущей силы, который приводится во вращение электрическим сигналом, установленный с возможностью монтажа и демонтажа относительно корпуса;
механизм передачи движущей силы, установленный внутри корпуса и предназначенный для передачи движущей силы вращения блока привода на зажимной рычаг; и
соединительный механизм, предназначенный для переключения состояния соединения блока привода относительно корпуса, причем
возможность установки блока привода с возможностью монтажа и демонтажа относительно корпуса обеспечивается за счет переключения состояния соединения блока привода с помощью соединительного механизма.
Согласно настоящему изобретению в электрическом зажимном устройстве, имеющем вышеупомянутый блок привода, который приводится во вращение электрическим сигналом, механизм передачи движущей силы, предназначенный для передачи движущей силы вращения блока привода на зажимной рычаг, может быть установлен внутри корпуса, а переключение состояния соединения между корпусом и блоком привода может обеспечиваться с помощью соединительного механизма.
Следовательно, в случае выполнения операции технического обслуживания, например замены блока привода или т.п., простота взаимного разъединения корпуса и блока привода с помощью соединительного механизма, например, по сравнению с обычным зажимным устройством, в котором корпус и блок привода соединены с помощью крепежных деталей, таких как болты или т.п., обеспечивает возможность избежать осуществления таких сложных операций, как снятие болтов, и, следовательно, позволяет улучшить техническое обслуживание электрического зажимного устройства. Кроме того, извлечение блока привода из корпуса и замена этого блока привода на другой блок привода обеспечивает возможность свободного изменения движущей силы блока привода на одном и том же зажимном устройстве.
Указанные выше цели, возможности и преимущества настоящего изобретения станут более очевидными из приводимого ниже подробного описания, сопровождаемого ссылками на прилагаемые чертежи, на которых предпочтительный пример осуществления согласно настоящему изобретению показан с использованием иллюстрируемого примера.
Краткое описание чертежей
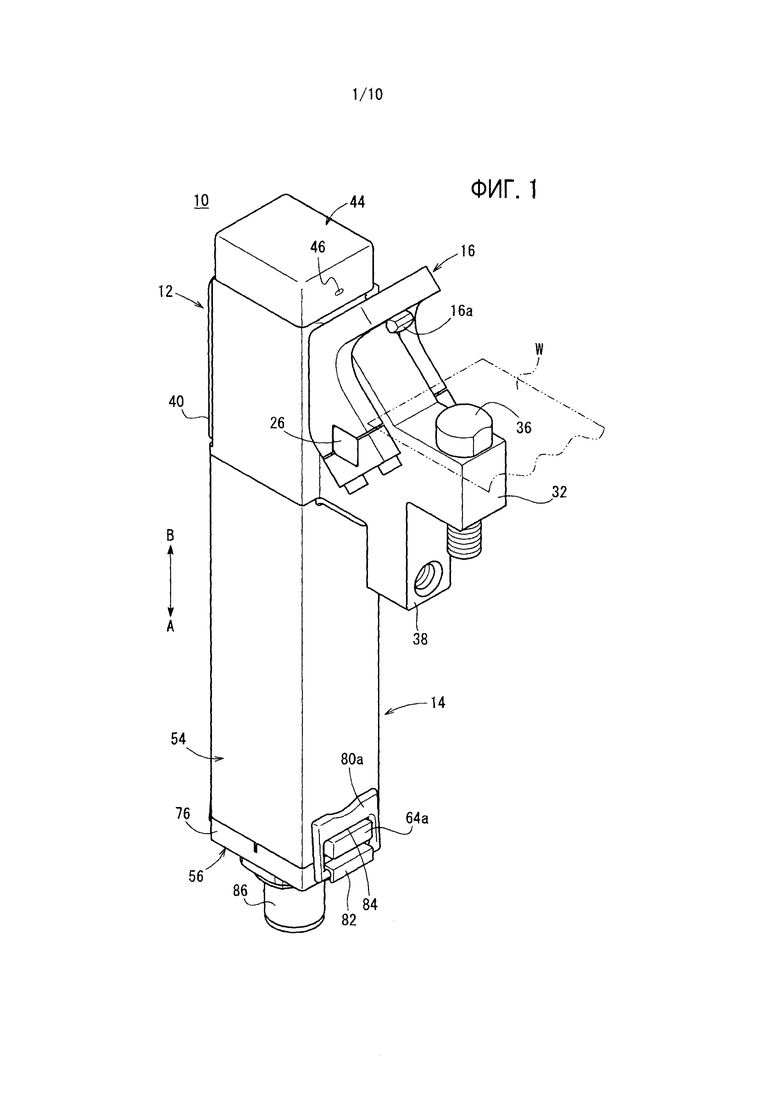
Фиг. 1 - общий вид в перспективе электрического зажимного устройства согласно примеру осуществления настоящего изобретения;
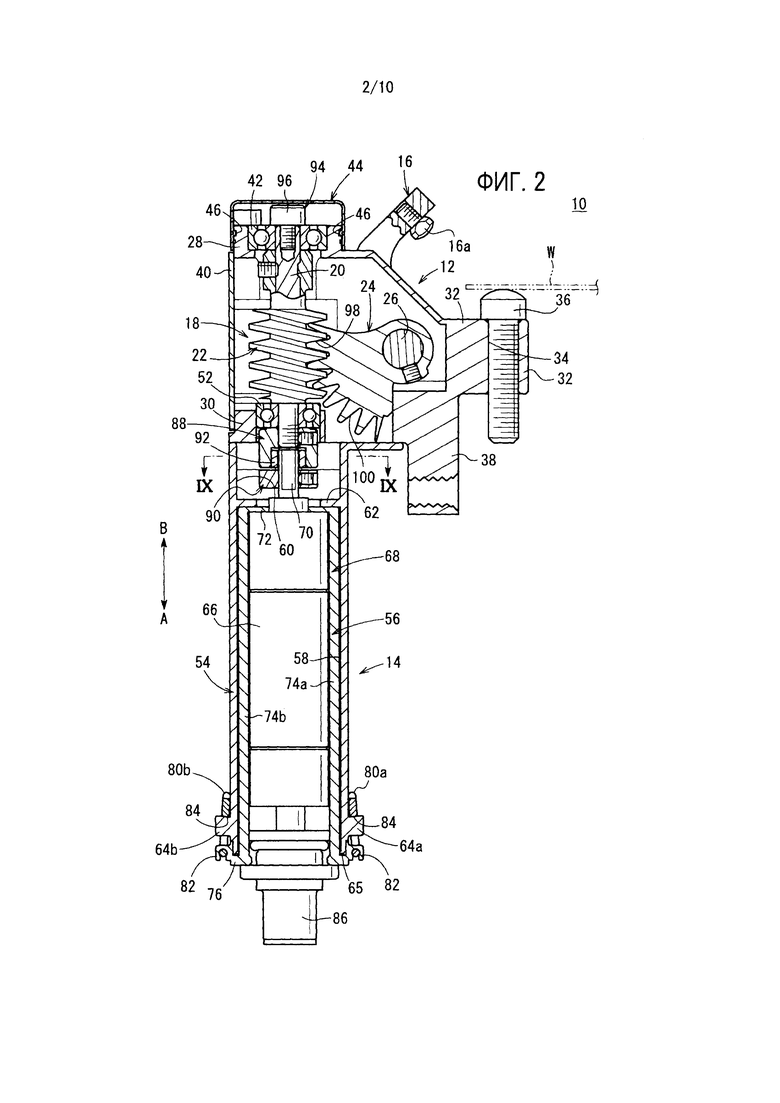
Фиг. 2 - вид электрического зажимного устройства, представленного на фиг. 1, в полном вертикальном разрезе;
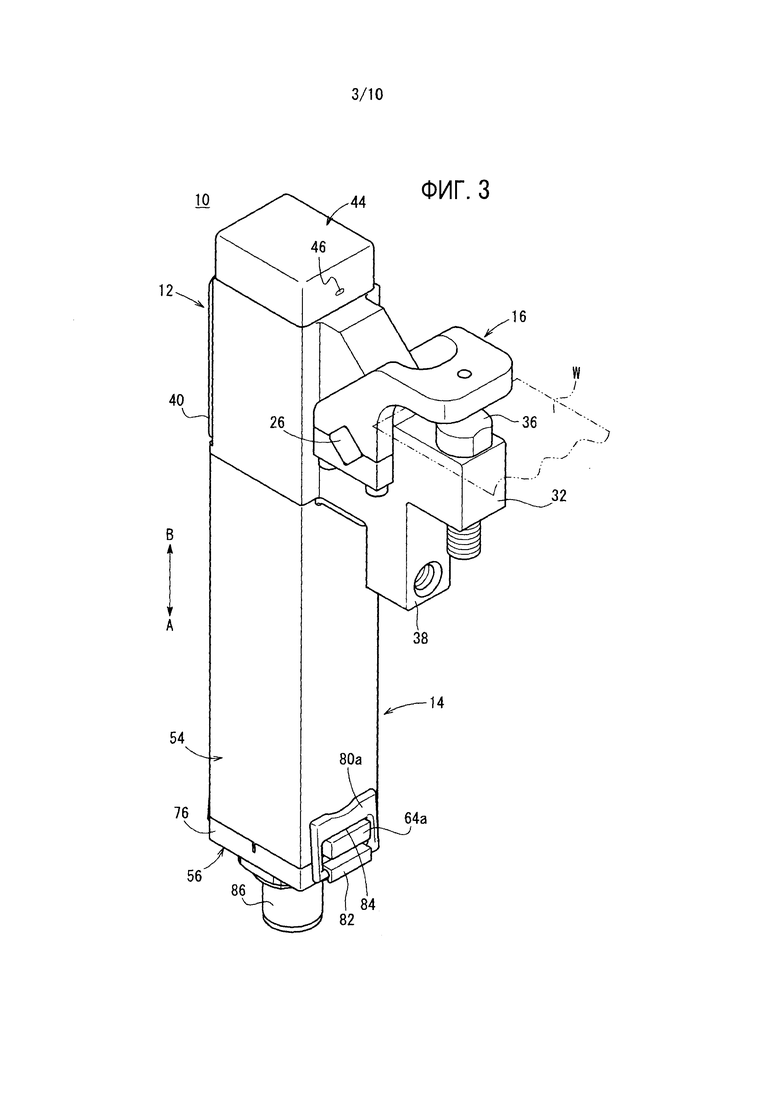
Фиг. 3 - общий вид в перспективе электрического зажимного устройства, представленного на фиг. 1, в состоянии зажатия;
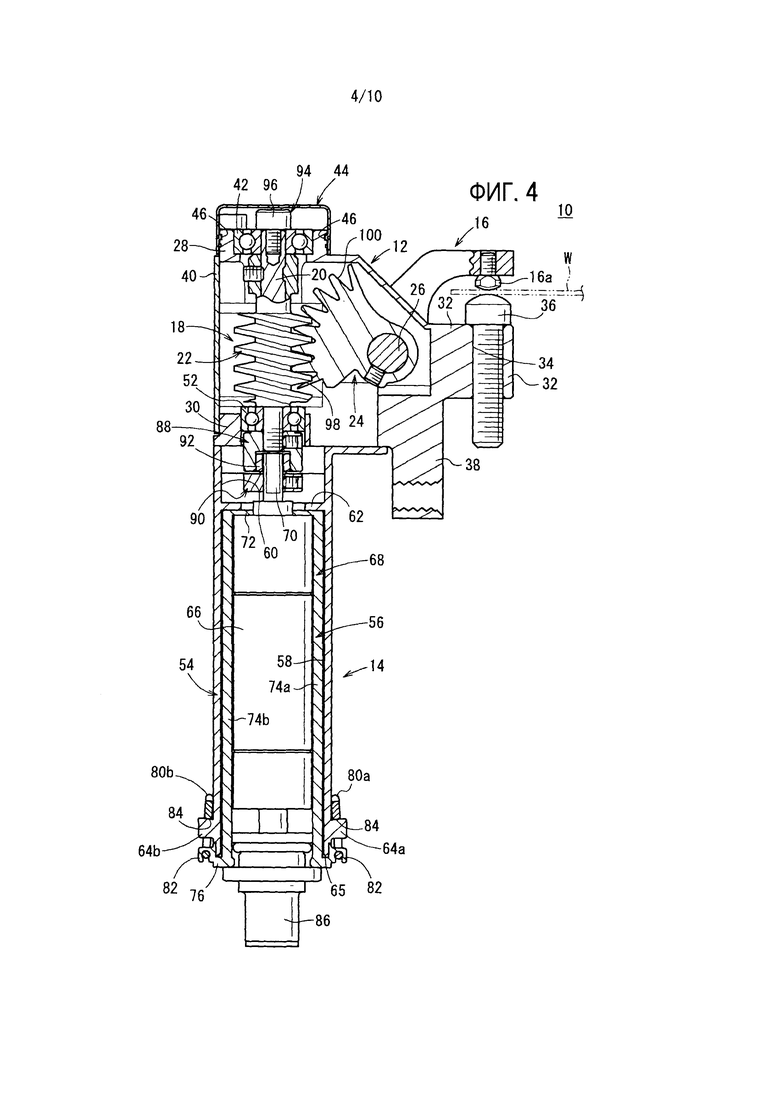
Фиг. 4 - вид электрического зажимного устройства, представленного на фиг. 3, в полном вертикальном разрезе;
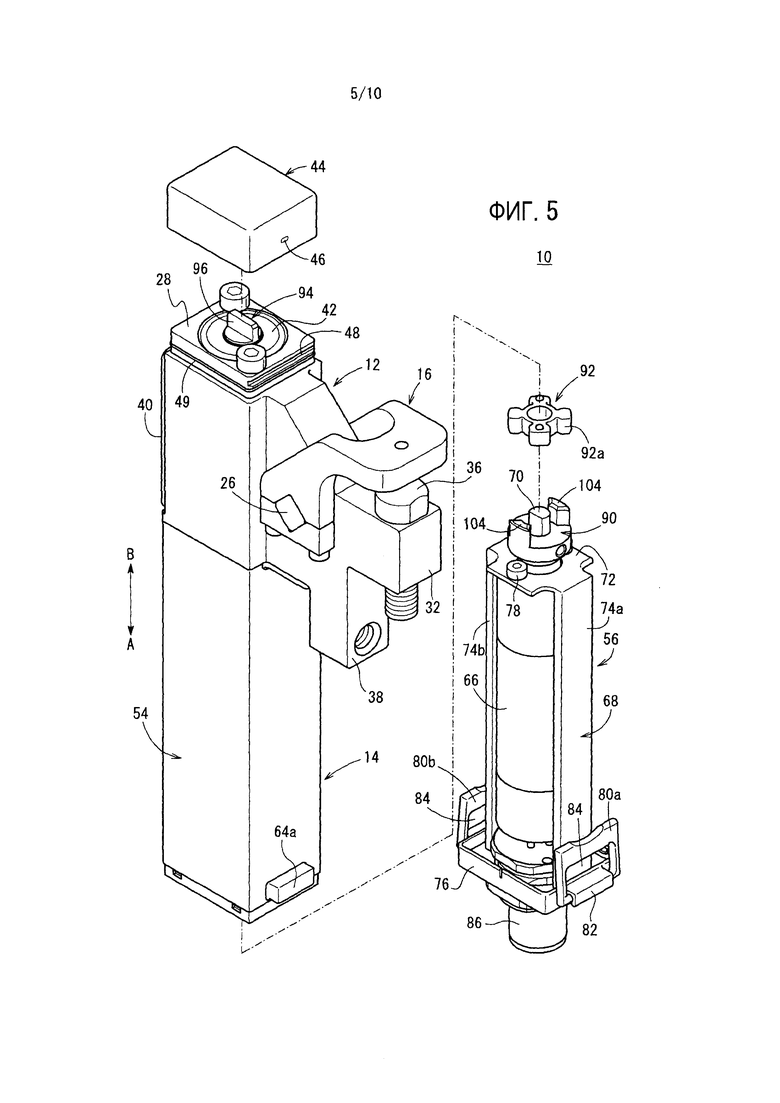
Фиг. 5 - вид электрического зажимного устройства, представленного на фиг. 1, в перспективе в частично разобранном состоянии;
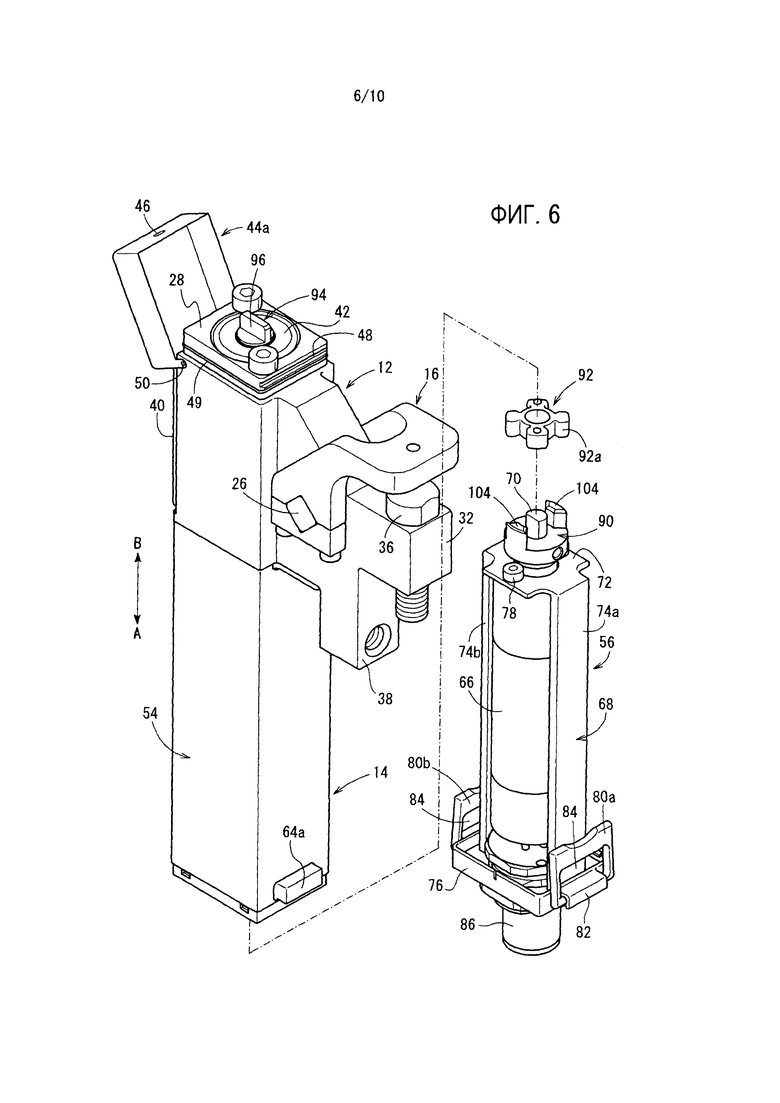
Фиг. 6 - вид в перспективе электрического зажимного устройства в варианте изобретения с использованием крышки;
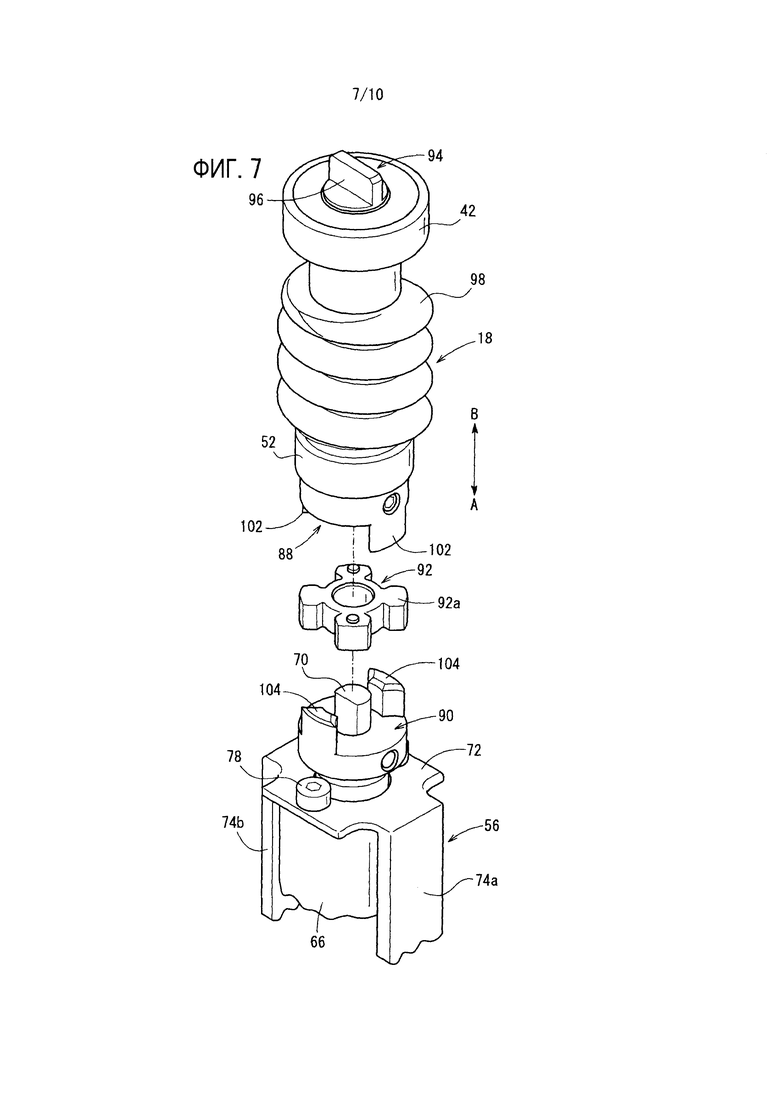
Фиг. 7 - вид механизма передачи движущей силы и блока привода в составе электрического зажимного устройства, представленного на фиг. 1, в перспективе в разобранном виде;
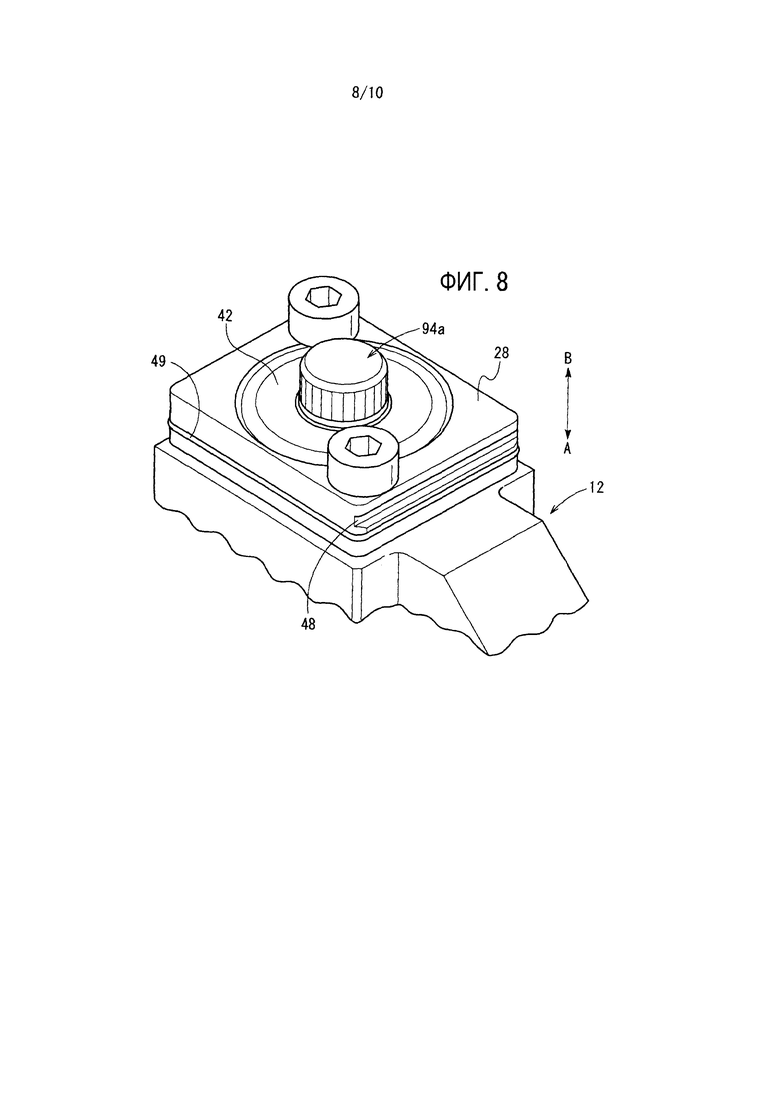
Фиг. 8 - вид в перспективе электрического зажимного устройства в варианте изобретения с использованием болта управления с увеличением;
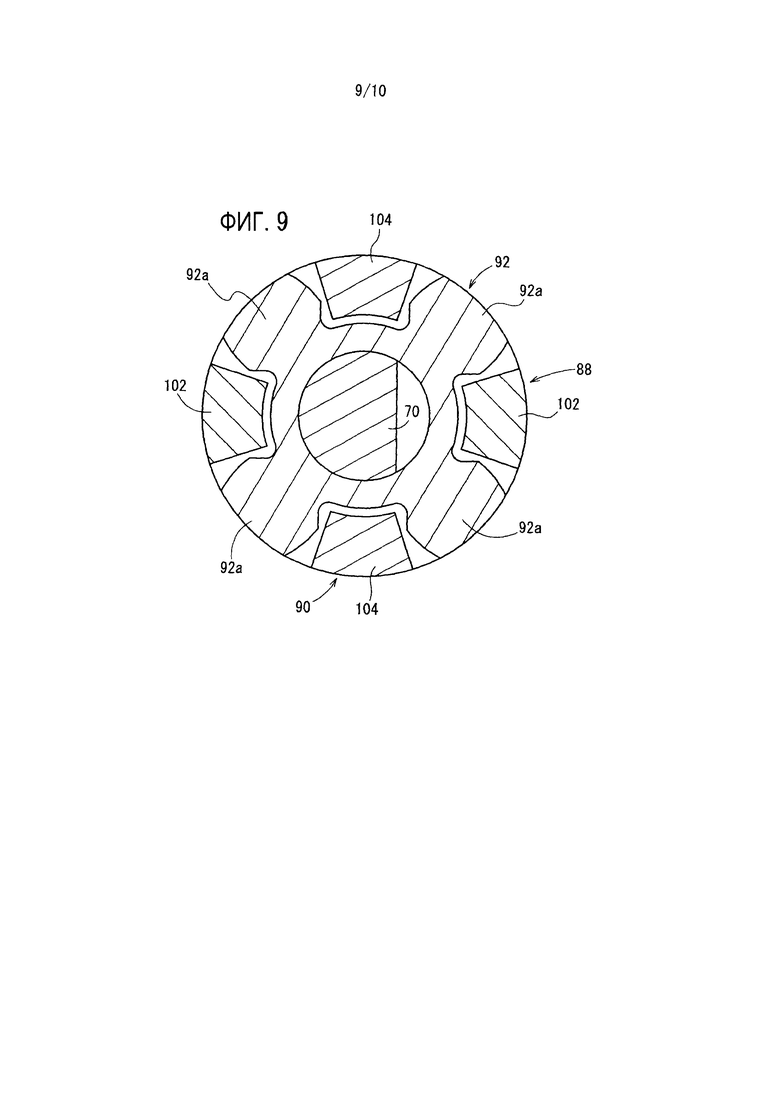
Фиг. 9 - вид в разрезе по линии IX-IX на фиг. 2;
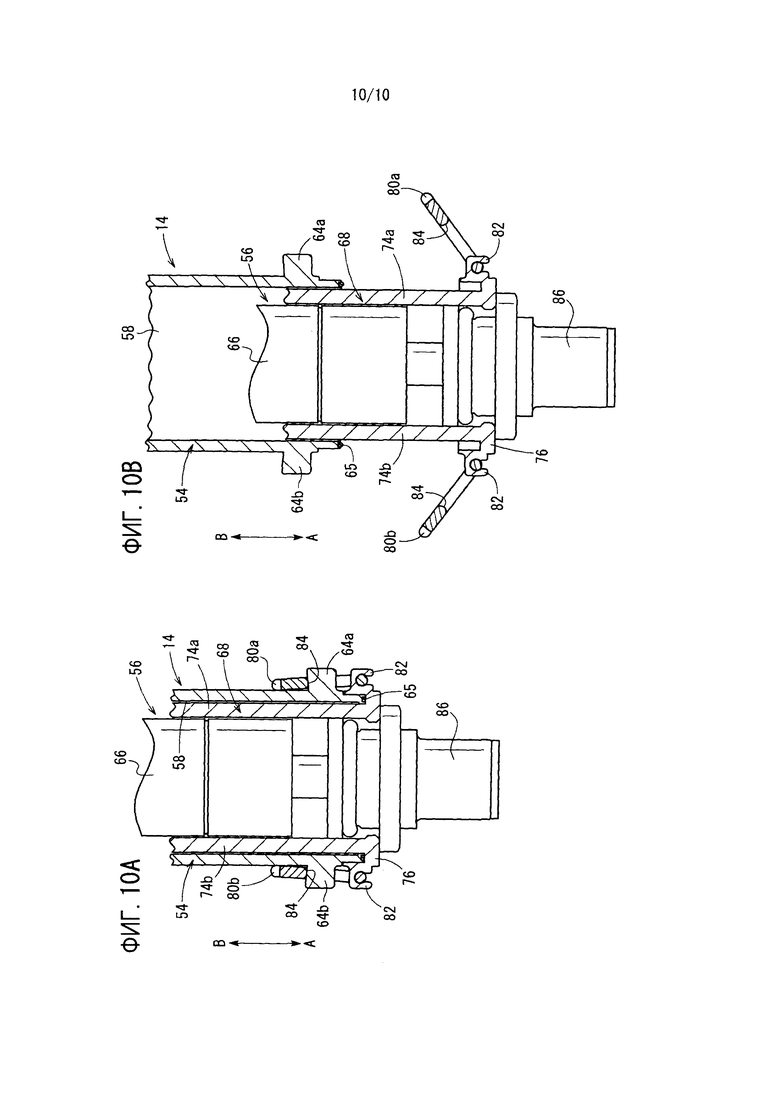
Фиг. 10А - вид в частичном разрезе, иллюстрирующий состояние соединения при размещении блока электродвигателя в кожухе блока привода с увеличением; и
Фиг. 10В - вид в частичном разрезе, иллюстрирующий состояние извлечения блока электродвигателя из кожуха, показанного на фиг. 10А, в направлении вниз с увеличением.
Описание вариантов осуществления
Как показано на фиг. 1-5, электрическое зажимное устройство 10 включает в себя корпус 12, блок 14 привода, установленный в нижней части корпуса 12, зажимной рычаг 16, установленный с возможностью свободного поворота относительно корпуса 12, и механизм 18 передачи движущей силы, установленный внутри корпуса 12 и предназначенный для передачи движущей силы от блока 14 привода на зажимной рычаг 16.
Корпус 12 сформирован, например, из металлического материала. Внутри пространства, образуемого этим корпусом, в вертикальном направлении (в направлении стрелки А или В) размещены вал 20 и червячная шестерня 22, которые образуют механизм 18 передачи движущей силы, причем с боковой стороны червячной шестерни 22 на опорной оси 26 с возможностью свободного поворота установлено червячное колесо 22.
Кроме того, корпус 12 включает в себя первый и второй поддерживающие элементы 28, 30, сформированные коаксиально в верхней и нижней частях этого корпуса, и выступающий участок 32, который выступает наружу относительно одной боковой стороны корпуса 12 и располагается между первым поддерживающим элементом 28 и вторым поддерживающим элементом 30. Выступающий участок 32 снабжен резьбовым отверстием 34, проходящим в вертикальном направлении через область выступающего участка 32, выступающую практически в горизонтальном направлении. Сверху в резьбовое отверстие 34 ввинчен опорный штифт 36. При этом зажимной элемент 16а зажимного рычага 16 может входить в контакт с верхней поверхностью обрабатываемой детали W и таким образом обеспечивать возможность поддерживания этой обрабатываемой детали W. На нижней стороне выступающего участка 32 сформирован крепежный участок 38, который проходит в вертикальном направлении вниз (в направлении стрелки А) и который используется в случае крепления электрического зажимного устройства 10, например, на поверхности стенки с помощью болтов или т.п.
При этом с противоположной от выступающего участка 32 стороны корпус 12 имеет открытую боковую стенку, закрываемую с помощью крышки 40, монтируемой на этой боковой стенке.
На первом поддерживающем элементе 28 установлен первый подшипник 42, причем этот поддерживающий элемент закрывается размещаемым сверху колпачком 44. Колпачок 44 является полым, имеет в сечении практически U-образную форму и устанавливается на первом поддерживающем элементе 28 так, что открытый конец этого колпачка ориентирован в сторону сторона корпуса 12 (в направлении стрелки А). Кроме того, на боковых стенках колпачка 44 со стороны открытого конца сформирована пара выступов 46, выступающих в направлении внутрь и входящих в зацепление с парой канавок 48, сформированных на боковой поверхности первого поддерживающего элемента 28.
В частности, колпачок 44 установлен с возможностью закрытия первого поддерживающего элемента 28 корпуса 12 и поддержания в закрытом состоянии за счет зацепления выступов 46 с канавками 48 и возможностью монтажа и демонтажа относительно первого поддерживающего элемента 28.
Кроме того, как показано на фиг. 5 и 8, в канавке на внешней окружной поверхности первого поддерживающего элемента 28 установлено уплотнительное кольцо 49. При установке колпачка 44 состояние уплотнения между колпачком 44 и первым поддерживающим элементом 28 поддерживается за счет контакта уплотнительного кольца 49 с внутренней поверхностью стенки колпачка 44.
При этом колпачок 44 не ограничивается только рассмотренной выше конструкцией с возможностью монтажа и демонтажа относительно первого поддерживающего элемента 28. Например, как показано на фиг. 6, возможно также использование колпачка 44а, поддерживаемого с возможностью свободного поворота относительно первого поддерживающего элемента 28 с помощью штифта 50, установленного со стороны одного конца этого колпачка. При управлении рассматриваемым ниже болтом 94 управления в результате захвата и подъема вверх этого колпачка 44а со стороны другого конца оператором (непоказанным) выступ 46 выходит из зацепления с канавкой 48 и колпачок 44а может быть открыт путем поворота вокруг штифта 50. Такая конструкция, в которой колпачок 44а постоянно удерживается на корпусе 12 с помощью штифта 50, позволяет избежать необходимости учета положения размещения колпачка 44а после снятия с корпуса 12 и вероятности потери этого колпачка 44а.
Как показано на фиг. 1-5, на заданном расстоянии ниже первого поддерживающего элемента 28 (в направлении стрелки А) сформирован второй поддерживающий элемент 30, на котором коаксиально с первым подшипником 42 установлен второй подшипник 52. Эти первый и второй подшипники 42, 52 поддерживают противоположные концы вала 20 в составе механизма 18 передачи движущей силы с возможностью свободного вращения.
Блок 14 привода включает в себя кожух (корпус) 54, выполненный из трубчатой заготовки с прямоугольной формой сечения, и блок электродвигателя (блок привода) 56, который может быть размещен внутри кожуха 54. Этот кожух 54 содержит первый отсек 58, в котором размещается блок 56 электродвигателя, и второй отсек 60, который располагается над первым отсеком 58 и в котором размещается часть механизма 18 передачи движущей силы. Верхняя часть второго отсека 60 соединена с нижним концом корпуса 12. Кожух 54 соединен с корпусом 12 с помощью множества крепежных болтов (непоказанных).
Кроме того, между первым отсеком 58 и вторым отсеком 60 сформирована перегородка 62, располагающаяся перпендикулярно осевому направлению (направлению стрелки А или В) кожуха 54.
Первый отсек 58 имеет прямоугольную форму в сечении с практически неизменной площадью сечения в осевом направлении. Вблизи нижнего конца этого отсека сформированы два выступа 64а, 64b, выступающие под прямым углом относительно боковых поверхностей первого отсека 58. Выступы 64а, 64b, имеющие удлиненную форму в сечении и проходящие в направлении ширины перпендикулярно осевому направлению (направлению стрелки А или В) кожуха 54, сформированы на одной боковой поверхности и на другой боковой поверхности один против другого по обе стороны первого отсека 58. При этом выступы 64а, 64b располагаются на одной боковой поверхности кожуха 54 с той же самой стороны, что и выступающий участок 32 корпуса 12, и на другой боковой поверхности кожуха 54 с противоположной от выступающего участка 32 стороны.
Кроме того, на нижнем конце кожуха 54 в канавке установлено уплотнительное кольцо 65. В процессе сборки при установке блока 56 электродвигателя в кожух 54 уплотнительное кольцо 65 размещается в контакте с держателем 76 (рассматриваемым ниже) рамы 68 в составе блока 56 электродвигателя, за счет чего обеспечивается состояние уплотнения между блоком 56 электродвигателя и кожухом 54.
Блок 56 электродвигателя включает в себя электродвигатель (источник движущей силы) 66, представляющий собой, например, электродвигатель постоянного тока или шаговый электродвигатель, имеющий заданную длину в осевом направлении, и раму 68, поддерживающую этот электродвигатель 66.
Электродвигатель 66 размещен в первом отсеке 58 так, что его ведущий вал 70 ориентирован в направлении вверх (в направлении стрелки В) и проходит через перегородку 62 во второй отсек 60. При этом ведущий вал 70 имеет, например, полукруглую форму в сечении со срезанной частью внешней окружной поверхности.
Рама 68 включает в себя верхнюю стенку 72, пару боковых стенок 74а, 74b, располагающихся перпендикулярно верхней стенке 72, и держатель 76, соединенный с концами боковых стенок 74а, 74b. При этом рама 68 имеет форму полости, открытой с боковых сторон, и установлена так, что верхняя стенка 72, боковые стенки 74а, 74b и держатель 76 располагаются с соответствующих внешних сторон электродвигателя 66 и закрывают оба конца и часть боковой поверхности электродвигателя 66. Верхняя стенка 72 располагается со стороны верхнего торца (в направлении стрелки В) электродвигателя 66 с выступающим ведущим валом 70 и закреплена на электродвигателе 66 с помощью болта 78. Боковые стенки 74а, 74b располагаются практически параллельно одна другой вдоль внешней окружной поверхности электродвигателя 66 и проходят на заданную длину в направлении вниз (в направлении стрелки А) от верхней стенки 72.
Размер держателя 76 по ширине превышает соответствующий размер верхней стенки 72 и расстояние между боковыми стенками 74а, 74b и обращен к нижнему торцу электродвигателя 66. Кроме того, держатель 76 располагается практически параллельно верхней стенке 72 и на его одной боковой поверхности и другой боковой поверхности размещены стопорные пластины 80а, 80b, установленные с возможностью свободного поворота.
Стопорные пластины 80а, 80b представляют собой пластины практически прямоугольной формы, нижние концы которых удерживаются с возможностью свободного поворота в поддерживающих элементах 82, сформированных на одной боковой поверхности и на другой боковой поверхность держателя 76. Стопорные пластины 80а, 80b снабжены отверстиями 84 практически прямоугольной формы 84, выполненными практически в центре этих пластин. При размещении блока 56 электродвигателя в первом отсеке 58 кожуха 54 эти две стопорные пластины 80а, 80b располагаются напротив выступов 64а, 64b кожуха 54, и в результате поворота стопорных пластин 80а, 80b выступы 64а, 64b вставляются в соответствующие отверстия 84, за счет чего обеспечивается фиксация положения блока 56 электродвигателя относительно кожуха 54.
То есть за счет зацепления стопорных пластин 80а, 80b с выступами 64а, 64b обеспечивается ограничение перемещения блока 56 электродвигателя в осевом направлении (в направлении стрелок А и В) относительно кожуха 54.
Кроме того, на нижней части держателя 76 сформировано соединительное звено 86, выступающее в направлении вниз и проходящее в первый отсек 58. Своими выводами (непоказанными) соединительное звено 86 электрически соединяется с электродвигателем 66, а с помощью своего разъема (непоказанного), например, с контроллером (непоказанным), электрические сигналы которого подаются через разъем на электродвигатель 66 и обеспечивают привод электродвигателя во вращение.
Как показано на фиг. 2, 4 и 7, механизм 18 передачи движущей силы включает в себя вал 20, установленный с возможностью свободного вращения в первом и втором подшипниках 42, 52 внутри корпуса 12, червячную шестерню 22, установленную в неподвижном состоянии относительно вала 20, червячное колесо 24, входящее в зацепление с червячной шестерней 22, первое соединительное звено 88, соединенное с нижним концом вала 20, второе соединительное звено 90, соединенное с ведущим валом 70 электродвигателя 66, и муфту 92, соединяющую первое соединительное звено 88 и второе соединительное звено 90 одно с другим.
Вал 20 имеет заданную длину в осевом направлении (в направлении стрелки А или В) и проходит в вертикальном направлении внутри корпуса 12. Верхний конец вала 20 поддерживается с возможностью свободного вращения относительно первого подшипника 42, установленного в первом поддерживающем элементе 28 корпуса 12, а нижний конец этого вала поддерживается с возможностью свободного вращения с помощью второго подшипника 52, установленного во втором поддерживающем элементе 30 корпуса 12.
Кроме того, на верхнем конце вала 20 установлен болт 94 управления, предназначенный для обеспечения ручного управления механизмом 18 передачи движущей силы, включающим в себя вал 20. Болт 94 управления имеет рукоятку 96 пластинчатой формы, соединенную при помощи резьбы с валом 20 в коаксиальном положении относительно этого вала 20 и проходящую в направлении вверх под прямым углом к его оси. При этом оператор (непоказанный) может захватывать рукоятку 96 и поворачивать болт 94 управления в заданном направлении, обеспечивая тем самым вращение вала 20 и, следовательно, вращение червячной шестерни 22.
Вышеупомянутый болт 94 управления не ограничивается только конструкцией с рукояткой 96, выступающей в перпендикулярном направлении, и например, как показано на фиг.8, возможно использование болта 94а управления с вогнутыми/выпуклыми выемками (канавками) на внешней окружной поверхности.
Червячная шестерня 22 выполнена, например, в виде цилиндрического тела, на внешней окружной поверхности которого сформирована спиралевидная винтовая канавка 98. Через центр червячной шестерни 22 вставлен вал 20, соединенный с образованием одного целого с этой шестерней с помощью стопорного винта, ввинченного в радиальном направлении со стороны внешней окружной поверхности червячной шестерни 22. В результате червячная шестерня 22 вращается как одно целое с валом 20. Кроме того, червячная шестерня 22 установлена в положении, при котором она обращена к внешней окружной поверхности червячного колеса 24 и зубья 100 этого червячного колеса 24 входят в зацепление с винтовой канавкой 98. Поэтому вращение вала 20 и червячной шестерни 22 обеспечивается за счет зубчатого зацепления винтовой канавки 98 с зубьями 100 червячного колеса 24 и приводит к повороту этого червячного колеса 24 на заданный угол вокруг опорной оси 26.
Червячное колесо 24 размещено практически в центральном положении в направлении ширины корпуса 12 и установлено с возможностью свободного поворота вокруг опорной оси 26, поддерживаемой с возможностью вращения в корпусе 12. Червячное колесо 24 имеет в сечении форму, например, вентилятора с опорной осью 26 в радиальном центре этого вентилятора. Зубья 100 сформированы вдоль дугообразной внешней окружной поверхности червячного колеса 24. Кроме того, с обоими концами опорной оси 26 соединены соответствующие концевые участки зажимного рычага 16, имеющего в сечении U-образную форму, за счет чего в результате поворота опорной оси 26 на заданный угол обеспечивается и поворот зажимного рычага 16.
Как показано на фиг. 7, первое соединительное звено 88 имеет в сечении U-образную форму и снабжено парой первых хомутов 102. Первые хомуты 102 ориентированы в направлении вниз (в направлении стрелки А) и соединены с образованием единого целого с нижним концом вала 20.
Точно так же как и первое соединительное звено 88, второе соединительное звено 90 имеет в сечении U-образную форму и снабжено парой вторых хомутов 104. Вторые хомуты 104 ориентированы в направлении вверх (в направлении стрелки В) и соединены с вставленным в это второе соединительное звено ведущим валом 70. Ведущий вал 70, имеющий в сечении полукруглую форму, вставлен через центр второго соединительного звена 90, за счет чего обеспечивается ограничение относительного перемещения ведущего вала 70 и второго соединительного звена в направлении вращения и вращение этого второго соединительного звена 90 как одного целого с ведущим валом 70.
Таким образом, как показано на фиг. 7, первые хомуты 102 первого соединительного звена 88 и вторые хомуты 104 второго соединительного звена 90 размещены одни против других, но во взаимно различных положениях, если смотреть на вал 20 и ведущий вал 70 в осевом направлении (см. фиг. 9).
Муфта 92 имеет в сечении крестообразную форму с четырьмя ножками 92а и размещена между первым соединительным звеном 88 и вторым соединительным звеном 90 коаксиально с этими первым и вторым соединительными звеньями 88, 90. Как показано на фиг. 9, ножки 92а вставлены соответственно между первыми хомутами 102 и вторыми хомутами 104 в окружном направлении, за счет чего с помощью муфты 92 обеспечивается ограничение относительного перемещения первого соединительного звена 88 и второго соединительного звена 90 в направлении вращения и перемещение первого и второго соединительных звеньев 88, 90 в направлении вращения как одного целого с муфтой 92.
В результате вращение ведущего вала 70 электродвигателя 66, передаваемое через второе соединительное звено 90, муфту 92 и первое соединительное звено 88, вызывает вращение как одного целого и вала 20 и приводит к вращению червячной шестерни 22.
Электрическое зажимное устройство 10 согласно примеру осуществления настоящего изобретения в основном имеет описанную выше конструкцию. Далее рассмотрим процесс работы и преимущества этого электрического зажимного устройства 10. В процессе дальнейшего описания исходным нерабочим состоянием электрического зажимного устройства будем считать состояние, при котором зажимной элемент 16а зажимного рычага 16, показанный на фиг. 1 и 2, располагается в практически вертикальном положении на расстоянии от опорного штифта 36. Кроме того, на верхнем участке опорного штифта 36 при этом располагается тонкая обрабатываемая деталь W пластинчатой формы.
Прежде всего на электродвигатель 66 блока 14 привода электрического зажимного устройства 10 в исходном состоянии, показанного на фиг. 1 и 2, с контроллера (непоказанного) подается электрический сигнал, вызывающий вращение ведущего вала 70 электродвигателя 66, которое передается через первое и второе соединительные звенья 88, 90 и вал 20 на червяную шестерню 22 и приводит к началу вращения этой червячной шестерни 22.
При этом вращение червячной шестерни 22 вызывает поворот червячного колеса 24, зубья 100 которого, как показано на фиг.2, находятся в зацеплении с винтовой канавкой 98 червячной шестерни 22, вокруг опорной оси 26 по часовой стрелке, в результате которого зажимной элемент 16а зажимного рычага 16 начинает приближаться к опорному штифту 36.
Дальнейшее вращение ведущего вала электродвигателя 66 и продолжение вращения червячной шестерни 22 приводят, как показано на фиг. 3 и 4, за счет зубчатого зацепления зубьев 100 с винтовой канавкой 98 к дальнейшему повороту червячного колеса 24 по часовой стрелке. В результате зажимной элемент 16а зажимного рычага 16 приводится в контакт с верхней поверхностью обрабатываемой детали W и устанавливается в рабочее состояние, при котором, как показано на фиг. 3 и 4, обрабатываемая деталь W зажимается между зажимным элементом 16а и опорным штифтом 36.
При нахождении обрабатываемой детали W в вышеупомянутом зажатом состоянии подача электрического сигнала с контроллера (непоказанного) на электродвигатель 66 прекращается, в результате чего за счет зацепления зубьев 100 червячного колеса 24 с винтовой канавкой 98 червячной шестерни 22 поворот червячного колеса 24 ограничивается и электрическое зажимное устройство 10 устанавливается в заблокированное состояние, позволяющее поддерживать обрабатываемую деталь W в зажатом состоянии с помощью зажимного рычага 16 без какого-либо специального отдельного средства блокировки для ограничения поворота зажимного рычага 16.
В то же время вывод обрабатываемой детали W из зажатого состояния, обеспечиваемого, как показано на фиг.3 и 4, с помощью зажимного рычага 16, осуществляется за счет электрического сигнала обратной полярности, подаваемого на электродвигатель 66 блока 14 привода с контроллера (непоказанного). В результате ведущий вал 70 электродвигателя 66 начинает вращение в противоположном направлении, которое передается через вал 20 и первые и второй соединительные звенья 88, 90 на червячную шестерню 22 и вызывает вращение этой червячной шестерни в противоположном направлении.
При этом червячное колесо 24, находящееся в зубчатом зацеплении с винтовой канавкой 98 червячной шестерни 22, поворачивается против часовой стрелки вокруг опорной оси 26, обеспечивая тем самым перемещение зажимного элемента 16а зажимного рычага 16 в направлении удаления от обрабатываемой детали W и восстановление нерабочего состояния электрического зажимного устройства 10, при котором обрабатываемая деталь W не зажимается с помощью зажимного элемента 16а и опорного штифта 36 (см. фиг. 1 и 2).
Например, при прекращении подачи электропитания в блок 14 привода, то есть при обесточивании блока 14 привода вследствие неисправности в системе электропитания, вследствие невозможности обеспечения вращения электродвигателя 66, как было указано выше, например, обрабатываемая деталь W, зажатая с помощью зажимного рычага 16, может поддерживаться в зажатом состоянии. Однако в некоторых случаях по некоторым причинам возникает необходимость вывода обрабатываемой детали W из этого зажатого состояния. Рассмотрим далее со ссылками на фиг. 2 и 5 случай вывода обрабатываемой детали W из зажатого состояния при обесточивании блока 14 привода.
Прежде всего при нахождении обрабатываемой детали W, показанной на фиг.2, в зажатом состоянии оператор (непоказанный) захватывает колпачок 44, закрывающий первый поддерживающий элемент 28 корпуса 12, и, как показано на фиг.5, перемещает колпачок 44 в направлении вверх (в направлении стрелки В) и снимает его с первого поддерживающего элемента 28. При этом выступ 46 колпачка 44 выходит из канавки 48 первого поддерживающего элемента 28, за счет чего обеспечивается возможность снятия колпачка 44 с корпуса 12 без затруднений. В результате, как показано на фиг.5, обнажаются первый поддерживающий элемент 28 и болт 94 управления.
Затем оператор (непоказанный) захватывает рукоятку 96 болта 94 управления и вращает эту рукоятку 96 в заданном направлении, обеспечивая тем самым вращение вала 20 вместе с болтом 94 управления, которое в результате вращения червячной шестерни 22 вызывает за счет зубчатого зацепления винтовой канавки 98 с зубьями 100 поворот червячного колеса 24 и зажимного рычага 16 против часовой стрелки на заданный угол. В результате обрабатываемая деталь W, зажатая с помощью зажимного рычаг 16, может быть выведена из этого состояния оператором.
При этом болт 94 управления выполняет функцию средства ручного управления, обеспечивающего возможность вывода обрабатываемой детали W из зажатого состояния вручную без какого-либо специального инструмента или т.п.
Далее рассмотрим случай извлечения блока 56 электродвигателя в составе блока 14 привода из кожуха 54 и замены этого блока на другой новый блок 56 электродвигателя.
Прежде всего, как показано на фиг. 2, 4 и 10А, в состоянии, при котором блок 56 электродвигателя размещен в первом отсеке 58 кожуха 54, оператор (непоказанный) захватывает обе стопорные пластины 80а, 80b, установленные на поддерживающих элементах 82 рамы 68, и поворачивает верхние стороны этих стопорных пластин 80а, 80b в направлениях удаления от кожуха 54 вокруг нижних сторон этих пластин, поддерживаемых на поддерживающих элементах 82 рамы 68 (см. фиг. 10В). В результате выступы 64а, 64b кожуха 54 выходят из отверстий 84 стопорных пластин 80а, 80b и за счет выхода выступов 64а, 64b из зацепления с отверстиями 84 ограничение на перемещение блока 56 электродвигателя в осевом направлении относительно кожуха 54 снимается.
Затем оператор захватывает держатель 76 блока 56 электродвигателя и, как показано на фиг. 10В, вытаскивает держатель 76 в направлении удаления от кожуха 54, то есть в направлении вниз (в направлении стрелки А), и извлекает блок 56 электродвигателя из первого отсека 58 кожуха 54. В результате разъединения второго соединительного звена 90, соединенного с ведущим валом 70 электродвигателя 66, и муфты 92 второе соединительное звено 90 выходит из состояния сцепления с муфтой 92. При этом появляется возможность полного извлечения блока 56 электродвигателя из кожуха 54 и, как показано на фиг. 5, извлечение блока 56 электродвигателя завершается.
Затем в случае монтажа предварительно подготовленного другого нового блока 56 электродвигателя ведущий вал 70 этого блока 56 электродвигателя вводится в первый отсек 58 кожуха 54 (в направлении стрелки В) и перемещается оператором вдоль этого первого отсека 58. В этом случае, как показано на фиг. 10В, верхние стороны пары стопорных пластин 80а, 80b отводятся от боковых стенок 74а, 74b рамы 68.
При этом блок 56 электродвигателя вставляется вовнутрь кожуха 54 и второе соединительное звено 90, соединенное ведущим валом 70, входит в состояние сцепления с муфтой 92, обеспечивающей сцепление вторых хомутов 104 второго соединительного звена с первыми хомутами 102 первого соединительного звена во взаимно различных положениях. В результате ведущий вал 70 электродвигателя 66 соединяется с механизмом 18 передачи движущей силы и обеспечивается возможность передачи движущей силы электродвигателя 66 на механизм 18 передачи движущей силы. Кроме того, держатель 76 рамы 68 входит в контакт с нижним концом кожуха 54.
Затем оператор (непоказанный) захватывает пару стопорных пластин 80а, 80b и поворачивает верхние стороны этих стопорных пластин 80а, 80b вокруг их нижних сторон в направлениях приближения к одной боковой поверхности и другой боковой поверхности кожуха 54, в результате чего выступы 64а, 64b вставляются в соответствующие отверстия 84 и зацепляются с ними (см. фиг. 10А). При этом блок 56 электродвигателя 56 фиксируется на кожухе 54 с помощью стопорных пластин 80а, 80b в состоянии, при котором этот блок 56 электродвигателя размещается в первом отсеке 58 кожуха 54.
Как показано выше, в рассмотренном варианте осуществления в электрическом зажимном устройстве 10, снабженном блоком 14 привода, имеющим электродвигатель 66, приводимый во вращение электрическими сигналами, в этом блоке 14 привода блок 56 электродвигателя, имеющий электродвигатель 66, и кожух 54, внутри которого размещается этот блок 56 электродвигателя, могут свободно соединяться с помощью пары стопорных пластин 80а, 80b. Поэтому, например, в случае необходимости выполнения технического обслуживания, включающего в себя осуществление замены блока 56 электродвигателя или т.п., за счет простой операции поворота стопорных пластин 80а, 80b и вывода выступов 64а, 64b кожуха 54 из состояния зацепления с этими стопорными пластинами обеспечивается простота извлечения блока 56 электродвигателя из кожуха 54.
В результате, например, по сравнению с электрическим зажимным устройством, в котором блок 14 привода соединен с помощью болтов или т.п. с механизмом 18 передачи движущей силы или корпусом 12, обеспечивается возможность избежать осуществления таких сложных операций, как снятие болтов, и, следовательно, появляется возможность значительного улучшения технического обслуживания электрического зажимного устройства 10.
То есть проведение технического обслуживания электрического зажимного устройства 10 не требует от оператора (непоказанного) использования специального инструмента или т.п. при монтаже и извлечении блока 14 привода.
Кроме того, в электрическом зажимном устройстве 10, например, замена блока 56 электродвигателя на другой блок 56 электродвигателя с электродвигателем 66 другой мощности обеспечивает возможность свободного изменения движущей силы блока 14 привода в одном и том же корпусе, включающем в себя механизм 18 передачи движущей силы. В результате в случае необходимости изменения зажимной силы, прикладываемой к обрабатываемой детали W с помощью зажимного рычага 16, замена блока 14 привода на другой блок 14 привода с другим значением движущей силы обеспечивает возможность свободного изменения зажимной силы, прикладываемой к обрабатываемой детали W с помощью зажимного рычага 16, в одном и том же электрическом зажимном устройстве 10. При этом отсутствие необходимости использования множества электрических зажимных устройств 10 с различными выходными характеристиками позволяет снизить затраты на оборудование.
Кроме того, в случае поворота зажимного рычага 16 вручную оператором в результате снятия колпачка 44 и вращения болта 94 управления вручную без использования инструмента или т.п. обеспечивается возможность свободного поворота зажимного рычага 16 в требуемом направлении и вывода обрабатываемой детали W из зажатого или незажатого состояния.
Кроме того, корпус 12 является закрытым снаружи и даже его открытые участки закрыты крышкой 40 и блоком 14 привода, что обеспечивает возможность поддержания состояния уплотнения в пространстве этого корпуса и позволяет, например, даже в случае использования воды на линии сборки, на которой используется электрическое зажимное устройство 10, предотвратить проникновение воды во внутреннее пространство корпуса, а также попадание брызг на линии сварки или т.п.
Кроме того, надежность ограничения перемещения блока 56 электродвигателя в осевом направлении (в направлении стрелки А) относительно кожуха 54 может обеспечиваться в результате сцепления пары стопорных пластин 80а, 80b с кожухом 54. Поэтому, например, даже в случае растяжения проводов, соединенных с соединительным звеном 86 держателя 76, и приложения силы растяжения в направлении вниз к держателю 76 обеспечивается предотвращение случайного выскальзывания блока 56 электродвигателя, включающего в себя держатель 76, из кожуха 54 и сохраняется состояние ограничения перемещения.
Кроме того, на первом поддерживающем элементе 28, на котором смонтирован колпачок 44, установлено уплотнительное кольцо 49, за счет контакта которого с внутренней поверхностью стенки колпачка 44 в результате установки этого колпачка 44 на корпусе 12 предотвращается проникновение воды или т.п. из внешнего пространства внутрь корпуса 12.
Кроме того, на нижнем конце кожуха 54 установлено уплотнительное кольцо 65, которое в процессе сборки при установке блока 56 электродвигателя в кожух 54 размещается в контакте с держателем 76, за счет которого обеспечивается поддержание состояния уплотнения между кожухом 54 и блоком 56 электродвигателя и предотвращается проникновение воды или т.п. из внешнего пространства.
Электрическое зажимное устройство согласно настоящему изобретению не ограничивается только рассмотренным выше вариантом осуществления. Очевидно, что возможны и другие различные альтернативные или дополнительные конструкции этого устройства, не выходящие за пределы объема изобретения, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДНОЙ ИНСТРУМЕНТ С ИСТОЧНИКОМ СВЕТА (ВАРИАНТЫ) | 2007 |
|
RU2355562C1 |
| СТИРАЛЬНАЯ МАШИНА | 2021 |
|
RU2838292C2 |
| СТИРАЛЬНАЯ МАШИНА | 2019 |
|
RU2756501C1 |
| ЭЛЕКТРИЧЕСКОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2012 |
|
RU2600780C2 |
| ОГРАНИЧИТЕЛЬНОЕ ДИФФЕРЕНЦИАЛЬНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2664806C1 |
| КОНТРОЛЛЕР РАЗБЛОКИРОВАНИЯ НЕРЕВЕРСИВНОЙ СИСТЕМЫ ПЕРЕДАЧИ ВРАЩЕНИЯ | 2012 |
|
RU2552771C1 |
| ИЗДЕЛИЕ ИЗ ИГРУШЕЧНОГО КОНСТРУКТОРА | 1994 |
|
RU2118195C1 |
| СИЛОВОЙ ПРИВОД | 2005 |
|
RU2403360C2 |
| УСТРОЙСТВО С ЗАСЛОНКОЙ И УСТРОЙСТВО ВЫПОЛНЕНИЯ ТРАНЗАКЦИЙ С НОСИТЕЛЯМИ | 2013 |
|
RU2613862C2 |
| ЗУБЧАТАЯ ПЕРЕДАЧА С НЕПРЕРЫВНО ИЗМЕНЯЕМЫМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ | 2004 |
|
RU2340815C2 |
Изобретение относится к области устройств для зажатия обрабатываемых деталей. Устройство содержит корпус (12) с установленными в нем блоком (14) привода, механизмом (18) передачи движущего усилия блока (14) привода на зажимной рычаг (16), блоком ручного управления, соединенным с валом (20) упомянутого механизма (18). При этом блок (14) привода выполнен с возможностью соединения и разъединения с корпусом (12) посредством соединительного механизма с обеспечением ограничения осевого перемещения блока (14) привода относительно корпуса (12) в соединенном состоянии, а указанный соединительный механизм включает в себя выступ (64a, 64b), выполненный на боковой поверхности корпуса (12) в направлении, перпендикулярном направлению ввода блока (14) привода в корпус (12), и средство зацепления, установленное на блоке (14) привода с возможностью зацепления с выступом (64a, 64b). Использование изобретения позволяет упростить замену блока привода для изменения возможного усилия зажатия. 7 з.п. ф-лы, 10 ил.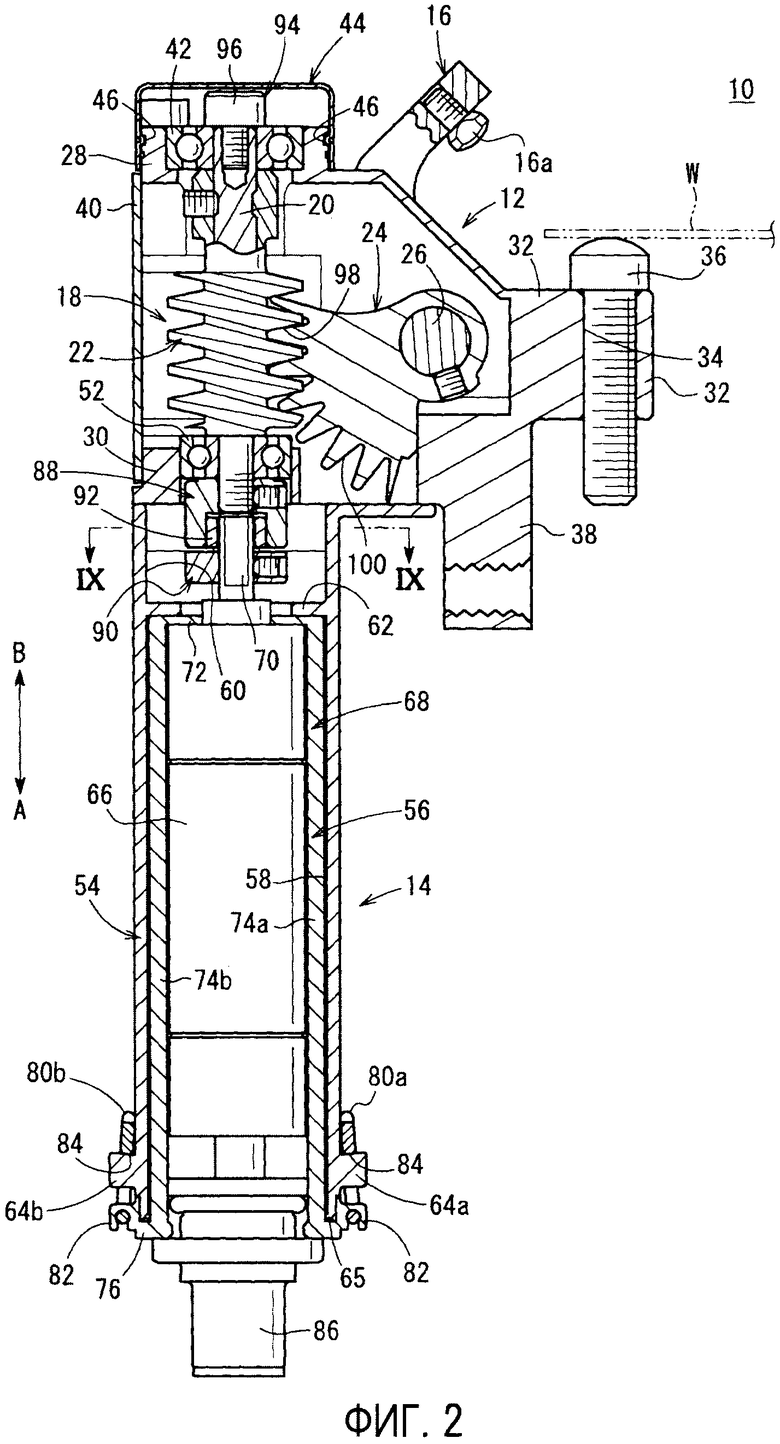
1. Электрическое зажимное устройство (10) для захвата обрабатываемой детали посредством поворота зажимного рычага (16), содержащее:
корпус (12),
установленный в корпусе (12) блок (14) привода, включающий в себя электродвигатель (66),
установленный в корпусе (12) механизм (18) передачи движущего усилия блока (14) привода на зажимной рычаг (16),
установленный на корпусе (12) блок ручного управления, соединенный с валом (20) упомянутого механизма (18) и включающий в себя исполнительный элемент (94, 94а) с рукояткой (96), установленной с возможностью ее захвата оператором, причем исполнительный элемент (94, 94а) установлен с возможностью свободного вращения с обеспечением поворота зажимного рычага (16) посредством упомянутого механизма (18) при нерабочем состоянии блока (14) привода,
при этом
блок (14) привода выполнен с возможностью соединения и разъединения с корпусом (12) посредством соединительного механизма с обеспечением ограничения осевого перемещения блока (14) привода относительно корпуса (12) в соединенном состоянии, а указанный соединительный механизм включает в себя:
выступ (64а, 64b), выполненный на боковой поверхности корпуса (12) в направлении, перпендикулярном направлению ввода блока (14) привода в корпус (12), и
средство зацепления, установленное на блоке (14) привода с возможностью зацепления с выступом (64а, 64b).
2. Устройство по п. 1, отличающееся тем, что указанное средство зацепления выполнено в виде пластины (80а, 80b) с отверстием (84), установленной с возможностью свободного поворота относительно боковой поверхности блока (14) привода с обеспечением ограничения осевого перемещения блока (14) привода относительно корпуса (12) при зацеплении выступа (64а, 64b) с упомянутым отверстием (84).
3. Устройство по п. 1, отличающееся тем, что корпус (12) снабжен установленным на нем колпачком (44, 44а) с возможностью свободного открытия и закрытия упомянутого блока ручного управления.
4. Устройство по п. 1, отличающееся тем, что упомянутый механизм (18) содержит:
червячную шестерню (22) со спиралевидной винтовой канавкой (98), сформированной на ее внешней окружной поверхности, соединенную с валом (20), и
червячное колесо (24), соединенное с зажимным рычагом (16), зубья (100) которого расположены в зацеплении с упомянутой винтовой канавкой (98),
при этом упомянутый механизм (18) выполнен с возможностью передачи движущего усилия блока (14) привода посредством вращения червячной шестерни (22) через зубья (100) червячного колеса (24) на зажимной рычаг (16).
5. Устройство по п. 4, отличающееся тем, что упомянутый механизм (18) дополнительно содержит:
первое соединительное звено (88), соединенное с валом (20),
второе соединительное звено (90), соединенное с ведущим валом (70) блока (14) привода, и
установленную между упомянутым звеном (88) и упомянутым звеном (90) муфту (92) для передачи движущего усилия от упомянутого звена (90) на упомянутое звено (88) с возможностью ограничения относительного перемещения упомянутого звена (88) и упомянутого звена (90) в направлении вращения.
6. Устройство по п. 3, отличающееся тем, что между колпачком (44, 44а) и корпусом (12) размещен уплотнительный элемент (49).
7. Устройство по п. 1, отличающееся тем, что электродвигатель (66) размещен на поддерживающей раме (68), причем электродвигатель (66) и рама (68) установлены как одно целое внутри кожуха (54).
8. Устройство по п. 1, отличающееся тем, что корпус (12) снабжен опорным элементом (36), выступающим наружу относительно одной из боковых сторон корпуса (12) с возможностью зажатия обрабатываемой детали между зажимным элементом (16а) зажимного рычага (16) и этим опорным элементом (36).
| US 2004231870 A1, 25.11.2004 | |||
| Устройство для закрепления деталей | 1981 |
|
SU1054013A1 |
| Устройство для зажима деталей | 1985 |
|
SU1296353A1 |
| US 5033552 A, 23.07.1991 | |||
| WO 03011529 A1, 13.02.2003 | |||
| US 2011083868 A1, 14.04.2011 | |||
| US 2005104268 A1, 19.05.2005. | |||

