Предлагаемое изобретение относится к строительству, а именно к способу управления работой турникета, используемого для контролируемого пропуска людей.
Турникет имеет корпус, установленный в корпусе механизм управления турникетом, поворотный узел и закрепленные на поворотном узле преграждающие органы, например, преграждающие штанги, в количестве не менее двух, расположенные под одинаковым углом к оси поворотного узла. Один из преграждающих органов в рабочем положении «проход закрыт» занимает по существу горизонтальное положение, перекрывая проход. Другие, по крайней мере один, преграждающие органы занимают нижнее поворотное положение, не мешающее проходу через турникет. Свободному проходу через турникет препятствует специальное блокирующее устройство механизма управления турникетом. При поступлении команды на разрешение прохода от пульта охраны или системы контроля доступа поворотный узел получает возможность свободно провернуться и пропустить человека.
В случае чрезвычайных ситуаций, например при пожаре, существует необходимость обеспечения свободного прохода через турникет, что достигается в турникетах-триподах переводом преграждающего органа, занимающего по существу горизонтальное положение и препятствующего проходу («проход закрыт»), в опущенное по существу вертикальное положение («проход открыт»). Это осуществляется или по команде от системы пожарной охраны, или при исчезновении электропитания турникета. После устранения события, мешающего нормальной работе турникета, выполняется перевод преграждающего органа обратно из положения «проход открыт» в рабочее положение «проход закрыт».
Наиболее близким аналогом к предлагаемому изобретению является «Способ управления работой турникетного устройства», содержащий вращающийся вокруг жестко установленной в устройстве оси управления блокировочный элемент, который с включением преимущественно одинаковых углов имеет расходящиеся от оси управления блокировочные органы, которые перемещают из рабочих обычных позиций в нерабочие позиции и которые вследствие вращения блокировочного элемента вокруг оси управления приводят в действие последовательно из одной, блокирующей проход людей, позиции в другую поворотную позицию, освобождающую проход, причем по мере надобности при последовательном переключении блокировочного органа из блокирующей позиции в деблокирующую следующий в направлении вращения орган передвигают в блокирующую позицию, а в случае мешающего нормальной работе события, например сбоя электропитания, по меньшей мере, блокировочный орган, стоящий в блокирующей позиции, может перемещаться из блокирующего пропуск людей положения в нерабочую позицию, позволяющую неконтролируемый проход, причем после устранения причины, вызывающей перемещение по меньшей мере блокировочного органа, стоящего в блокирующей позиции, этот орган устанавливают обратно в свое обычное рабочее положение путем воздействия возвратных усилий относительно оси управления блокировочного элемента и разъемно фиксируют в этом рабочем положении, отличающийся тем, что блокировочный элемент имеет с электродвигателем последовательного переключения приводное соединение и после устранения причины, вызывающей перемещение по меньшей мере блокировочного органа, стоящего в блокирующей позиции, в его нерабочую позицию, возвратные усилия, вызывающие возврат находящегося в нерабочем положении блокировочного органа в его нормальную рабочую позицию, путем последовательного переключения органа, по меньшей мере на один шаг, направляют для воздействия на блокировочный орган, находящийся в нерабочем положении (п. RU 2130540, Кл. МПК: Ε06В 11/08, дата публ. 20.05.1999).
Как видно из описания и формулы, данный способ управления работой турникета основан на том, что вращение поворотного узла осуществляется электродвигателем. После того как преграждающий орган перешел из рабочей позиции «проход закрыт» в нерабочую «проход открыт» и после устранения причины, вызывающей перемещение преграждающего органа, стоящего в преграждающей позиции, в его нерабочую позицию, электродвигатель поворачивает поворотный узел, при этом преграждающий орган возвращается в рабочую позицию под действием собственного веса и/или за счет центробежных сил.
Недостатком данного способа управления работой турникета является то, что в случае исчезновения электропитания в момент, когда ни один из преграждающих органов не занимает исходное горизонтальное положение, то есть практически в большинстве случаев сбоев электропитания, срабатывание механизма управления не приводит к опусканию преграждающего органа в положение «проход открыт», и требуется вручную повернуть поворотный узел так, чтобы один из преграждающих органов занял горизонтальное положение. Кроме того, перевод преграждающего органа из положения «проход открыт» в положение «проход закрыт» (возврат в рабочее положение) производится электроприводом путем вращения поворотного узла вокруг его оси; это делает невозможным применение данного способа в электромеханических турникетах, при проходе через которые вращение преграждающих органов производится механическим способом без использования электродвигателя.
Преимущества электромеханического турникета в сравнении с электроприводным турникетом, как например, в прототипе заключаются в следующем.
В электромеханическом турникете поворотный узел поворачивается проходящим через турникет человеком сначала до середины прохода (на 60° в трехштанговых турникетах-триподах и на 90° в двухштанговых турникетах). Причем механизм управления турникетом накапливает потенциальную энергию пружины, а затем, после середины прохода, механизм управления доворачивает поворотный узел до конечного положения (исходного горизонтального положения следующего преграждающего органа) за счет накопленной в первой части поворота потенциальной энергии пружины. При этом наличия электропитания не требуется ни в первой, ни во второй части поворота. Если проход человека через электромеханический турникет прекращен в первой половине прохода, то механизм управления турникетом возвращает преграждающий орган в исходное положение также без электропитания. Этим электромеханический турникет отличается от электроприводного, в котором вращение поворотного узла и связанных с ним преграждающих органов происходит с помощью электродвигателя, имеющего связь с поворотным узлом. При исчезновении электропитания электроприводного турникета преграждающий орган останавливается в том положении, в котором он находился в момент исчезновения электропитания, в том числе в любом промежуточном положении, не являющемся исходным горизонтальным положением «проход закрыт».
Примечание: в нашей заявке на изобретение №2015141163 от 28.09.2015 г. подробно описано устройство такого электромеханического турникета с автоматическими штангами антипаники, названными здесь более общим термином преграждающими органами.
В настоящей заявке предметом изобретения является способ управления работой такого турникета.
Тем самым, должен быть указан способ управления электромеханическим турникетом, позволяющий автоматически по команде или при сбое электропитания переводить его в состояние «проход открыт» независимо от положения преграждающих органов в момент поступления такой команды или сбоя электропитания, а также автоматически возвращать турникет в обычное рабочее состояние по команде или при возобновлении питания.
Первая задача (перевод турникета в состояние «проход открыт» независимо от положения преграждающих органов в момент поступления такой команды или сбоя электропитания) решается таким образом, что у турникета электромеханического типа, не имеющего привода вращения поворотного узла с преграждающими органами, перевод турникета в состояние «проход открыт» происходит независимо от положения преграждающих органов в момент поступления такой команды за счет автоматической доводки преграждающих органов до исходного горизонтального положения, в котором происходит опускание преграждающего органа под действием силы тяжести из положения «проход закрыт» в положение «проход открыт»,
Вторая задача решается не путем вращения поворотного узла и использования сил тяжести и (или) центробежных сил как в прототипе, а силовым воздействием непосредственно на преграждающий орган, позволяющим переводить его из нерабочего положения «проход открыт» в рабочее «проход закрыт».
Техническим результатом изобретения является сокращение расхода энергоресурсов и повышение надежности турникета при том способе управления его работой, который предлагается.
Предлагается способ управления работой турникета для контролируемого пропуска людей, содержащего вращающийся вокруг жестко установленной в турникете оси поворотный узел с расходящимися от его оси преграждающими органами, которые при штатной работе турникета вследствие вращения поворотного узла вокруг его оси переводят последовательно из одной, преграждающей проход, позиции в другую поворотную позицию, освобождающую проход, а в случае мешающего нормальной работе события, например сбоя электропитания, преграждающий орган, стоящий в преграждающей позиции, может перемещаться из преграждающего пропуск людей положения «проход закрыт» в нерабочее положение «проход открыт», причем после устранения причины, вызвавшей нарушение нормальной работы турникета, преграждающий орган устанавливают обратно в свое рабочее положение путем воздействия возвратных усилий относительно оси преграждающего органа и разъемно фиксируют в этом рабочем положении.
В соответствии с изобретением, приводное соединение каждого преграждающего органа с электроприводом выполнено с возможностью расцепления и в случае наступления мешающего нормальной работе события, преграждающий орган, стоящий в преграждающей позиции, автоматически переводят из преграждающего пропуск людей положения «проход закрыт» в нерабочее положение «проход открыт» независимо от момента наступления такого события, а после устранения причины, вызвавшей нарушение нормальной работы турникета, возвратные усилия, вызывающие возврат находящегося в нерабочем положении преграждающего органа в его рабочее преграждающее положение «проход закрыт», проводят путем поворота органа вокруг его оси в поворотном узле при неподвижном поворотном узле и направляют для воздействия на преграждающий орган, находящийся в нерабочем положении, от электропривода через механическую передачу, расцепляемую после выполнения своей задачи; при этом одновременно с подъемом преграждающего органа в его рабочее положение с помощью того же электропривода выполняют возврат в исходное положение механизма опускания преграждающего органа после его срабатывания, а после завершения вышеуказанных операций выполняют реверс электропривода в исходное состояние.
Для повышения надежности при силовых воздействиях на преграждающий орган рукой человека в момент опускания или подъема преграждающего органа в качестве электропривода используется реверсивный мотор-редуктор, например цилиндрический зубчатый, с передаточным отношением, допускающим передачу движения в обратном направлении от выходного вала к мотору с моментом, не превышающим максимальный крутящий момент мотора-редуктора.
Турникет поясняется чертежами:
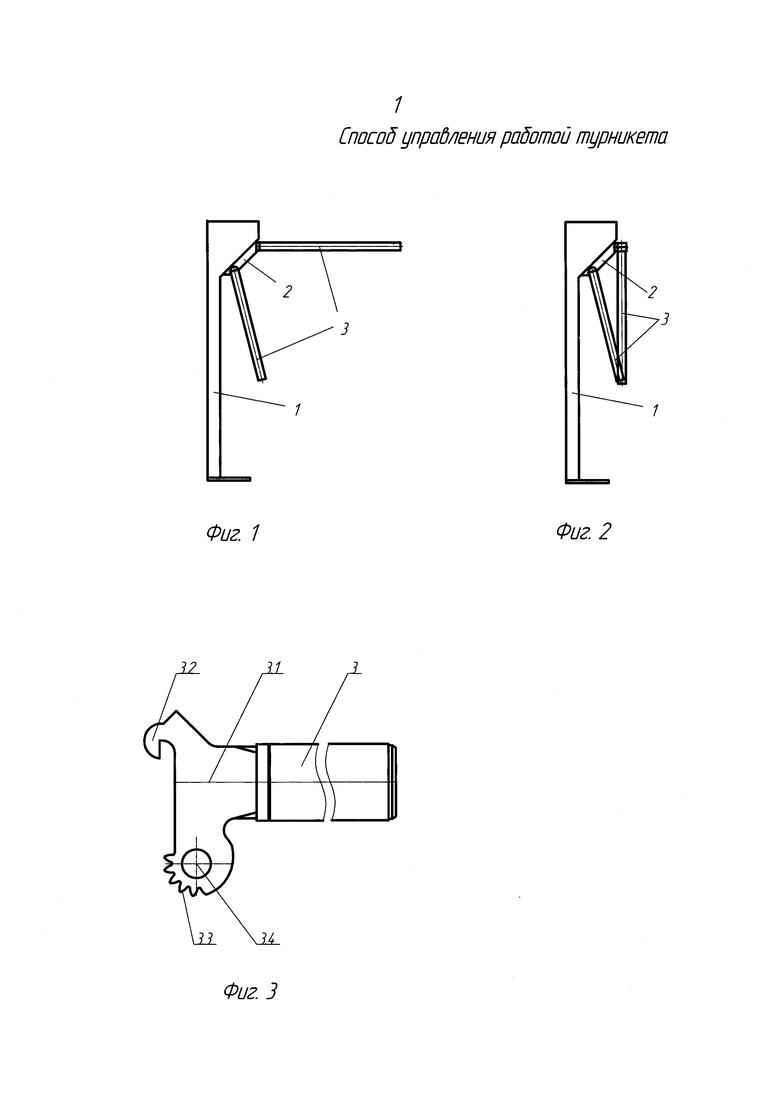
На фиг. 1 представлен общий вид турникета сбоку в положении преграждающего органа «проход закрыт»;
На фиг. 2 - общий вид турникета сбоку в положении преграждающего органа «проход открыт»;
фиг. 3 - конструкция преграждающего органа турникета;
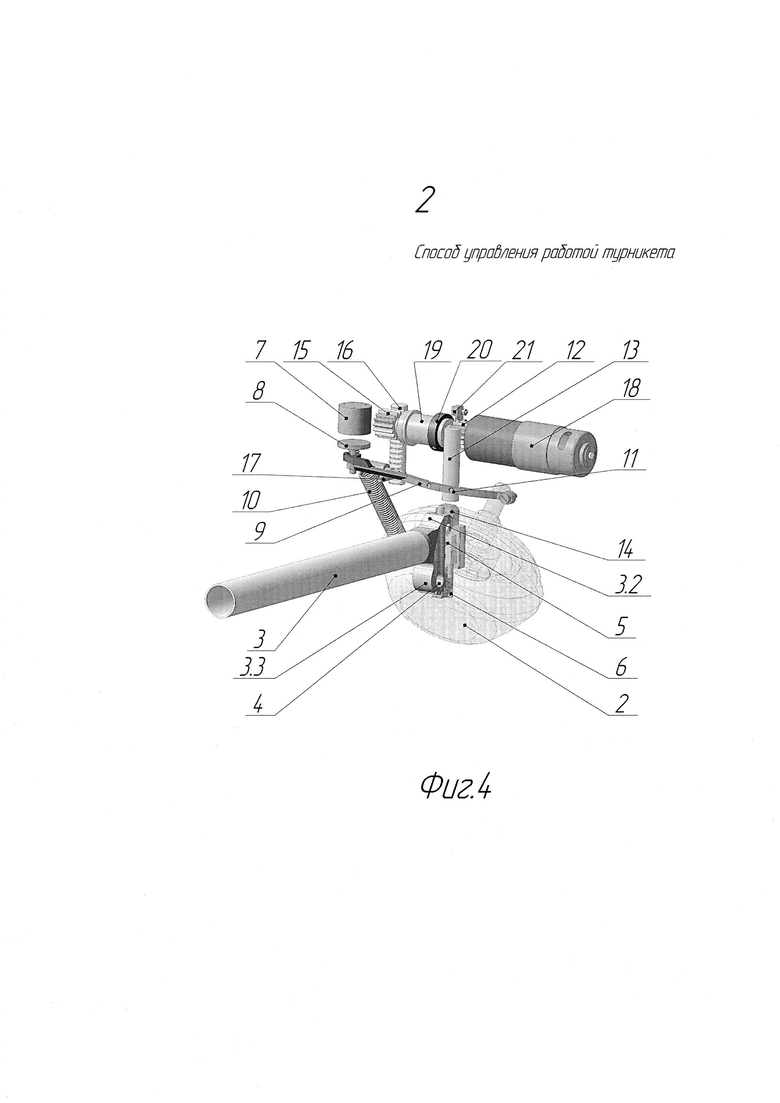
фиг. 4 - общий вид механизма управления турникетом в аксонометрии.
Турникет состоит из неподвижного корпуса 1, в верхней части которого расположен механизм управления турникетом, включающий, кроме прочего, поворотный узел 2 с тремя разъемно прикрепленными к нему преграждающими органами 3. В исходном рабочем положении один из преграждающих органов 3 занимает горизонтальное положение «проход закрыт» и служит препятствием для несанкционированного прохода (фиг. 1). При поступлении сигнала от кнопки тревоги или при исчезновении электропитания преграждающий орган падает, поворачиваясь на своей оси, жестко закрепленной в поворотном узле, и устанавливается в вертикальное положение «проход открыт» (фиг. 2).
Конструкция преграждающего органа 3 показана на фиг. 3; как видно, он включает, среди прочего, хвостовик 3.1 с зацепом 3.2, зубчатым сектором 3.3 и отверстием 3.4 для оси 4 поворота органа, выполненные как одно целое. Зацеп 3.2 служит для удержания органа в горизонтальном положении «проход закрыт», а зубчатый сектор 3.3 - для подъема органа из положения «проход открыт» в положение «проход закрыт». Такую конструкцию имеют все преграждающие органы турникета.
Общий вид механизма управления турникетом показан на фиг. 4. Преграждающий орган 3 может поворачиваться из горизонтального положения в вертикальное вокруг оси 4, жестко установленной в поворотном узле 2. Удержание преграждающего органа 3 в положении «проход закрыт» осуществляется ригелем 5 с пружиной сжатия 6.
Опускание преграждающего органа 3 из положения «проход закрыт» в положение «проход открыт» осуществляется следующим образом. Если на электромагните 7 имеется номинальное напряжение, он удерживает силой электромагнитного поля якорь 8 и связанный с якорем рычаг 9. При обесточивании электромагнита 7 его сила удержания уменьшается и пружина 10 поворачивает рычаг 9 против часовой стрелки, надавливая фигурной поверхностью 11 рычага 9 на ригель 5. Ригель 5 движется вниз, сжимая пружину 6, при этом ригель выходит из зацепления с зацепом 3.2 преграждающего органа, и орган под действием своего веса опускается вниз в положение «проход открыт». Если ни один из преграждающих органов в момент подачи команды на открытие прохода не находится в исходном горизонтальном положении, тогда механизм позиционирования турникета доводит ближайший к исходному положению преграждающий орган до исходного горизонтального положения, при этом ригель 5 плавно наезжает на фигурную поверхность 11 рычага 9 и, двигаясь вниз, освобождает зацеп 3.2 преграждающего органа; преграждающий орган под действием своего веса опускается вниз в положение «проход открыт».
Подъем преграждающего органа 3 в положение «проход закрыт» осуществляется с помощью зубчатой шестерни 12, зубчатой рейки-толкателя 13 и зубчатой рейки 14. В положении «начало подъема преграждающего органа» зубчатая рейка 14 занимает верхнее положение, при этом ее нижняя часть находится в направляющих поворотного узла, а верхняя - в пазах стойки турникета. Этим обеспечивается блокировка вращения поворотного узла так, что преграждающий орган 3 в положении «проход закрыт» в опущенном положении не может быть повернут вместе с поворотным узлом в другое положение, мешающее проходу. В конце подъема преграждающего органа зубчатая рейка 14 полностью находится в направляющих поворотного узла, способствуя тем самым расцеплению привода поворотного узла со стойкой турникета. Этим обеспечивается блокировка его вращения так, что преграждающего орган 3 в опущенном положении не может быть повернут вместе с поворотным узлом 2 в другое положение, мешающее проходу.
Зубчатая шестерня 12 может совершать вращательные движения как по часовой стрелке, так и против часовой стрелки, при этом находящаяся в зацеплении с ней зубчатая рейка-толкатель 13 совершает возвратно-поступательные движения вверх и вниз в пазах стойки турникета 1. При своем движении вниз зубчатая рейка-толкатель 13 толкает вниз зубчатую рейку 14, которая находится в постоянном зацеплении с зубчатым сектором 3.3 преграждающего органа 3. При движении вниз зубчатой рейки 14 орган 3 поворачивается вокруг своей оси в положение «проход закрыт», пока его зацеп 3.2 не войдет в зацепление с подпружиненным зацепом ригеля 5. Преграждающий орган 3 занимает положение «проход закрыт».
Одновременно с подъемом преграждающего органа 3 в положение «проход закрыт» выполняется возврат в исходное положение механизма опускания преграждающего органа после его срабатывания (взвод). В начальном положении якорь 8 электромагнита 7 под действием пружины 10 расцеплен с электромагнитом 7. При вращении зубчатой шестерни 15 по часовой стрелке зубчатая рейка 16 поднимается вверх и осью 17 поднимает рычаг 9 вместе с якорем 8 электромагнита 7. При подводе якоря 8 на близкое расстояние к электромагниту 7, последний, если на него подано напряжение, притягивает и удерживает якорь 8.
Привод механизма антипаники включает электрический мотор-редуктор 18, с выходным валом которого жестко соединен вал 19 с зубчатыми шестернями 12 и 15, выполненными как одно целое с валом. Вал 19 имеет фигурное кольцо 20, которое при своем повороте в определенном положении включает датчик 21 углового положения вала 19. Работой привода управляет контроллер (на чертеже не показан). Для защиты от поломки механизма управления турникетом при силовом воздействии на преграждающий орган 3 рукой, в моторе-редукторе используется зубчатый редуктор, например цилиндрический, с передаточным отношением, допускающим передачу движения в обратном направлении от выходного вала редуктора к мотору с моментом, не превышающим максимальный крутящий момент мотора-редуктора.
В соответствии с предлагаемым способом управления, работа турникета происходит следующим образом.
Исходное положение преграждающих органов 3 турникета - находятся в рабочем положении, к турникету подают напряжение, электромагнит 7 удерживает якорь 8 и рычаг 9 в верхнем положении, мотор-редуктор 18 выключен, вал 19 неподвижен, преграждающий орган 3 удерживается в положении «проход закрыт». Зубчатая рейка 14 занимает крайнее нижнее положение, определяемое зацеплением с зубчатым сектором 3.3 штанги, а зубчатая рейка-толкатель 13 - крайнее верхнее положение, определяемое датчиком 21. Поворотный узел 2 вращается при проходе людей вместе с преграждающими органами 3.
При поступлении команды на открытие прохода от кнопки тревоги или при исчезновении электропитания преграждающий орган 3, находящийся в исходном горизонтальном положении, опускают вниз, открывая проход, как это описано выше.
При поступлении команды на подъем преграждающего органа 3 в рабочее положение «проход закрыт» или при возобновлении электропитания включают мотор-редуктор 18, и вал 19 с шестернями 12 и 15 начинает вращаться по часовой стрелке (при виде со стороны шестерни 15). Одновременно производят подъем преграждающего органа 3 в положение «проход закрыт» и подготовку механизма управления к выполнению следующей возможной команды перевода преграждающего органа 3 в нерабочее по существу вертикальное положение «проход открыт». Момент окончания работы этих механизмов определяется по превышению порога тока мотора-редуктора, заданного контроллером привода, что происходит, когда зацеп 3.2 преграждающего органа 3 вошел в зацепление с ригелем 5 и затем уперся в тело поворотного узла 2. После этого меняют направление вращения мотора-редуктора на обратное, перемещая зубчатую рейку 15 вниз, а зубчатую рейку 12 вверх до положения, определяемого датчиком 21, и останавливают. Механизм управления турникетом находится в исходном положении и готов выполнить команду на открытие прохода.
Предложенный способ механизма управления электромеханического турникета-трипода обеспечивает автоматическое освобождение прохода по команде с удаленного устройства, независимо от момента поступления такой команды, или при исчезновении электропитания, а также автоматическое восстановление штанги в рабочее положение «проход закрыт» по команде с удаленного устройства или при возобновлении электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТУРНИКЕТ | 2015 |
|
RU2602057C1 |
| ТУРНИКЕТ | 2009 |
|
RU2401375C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТУРНИКЕТНОГО УСТРОЙСТВА | 1994 |
|
RU2130540C1 |
| КАЛИТКА АВТОМАТИЧЕСКАЯ | 2013 |
|
RU2530359C1 |
| ПОЛНОРОСТОВОЙ ТУРНИКЕТ | 2013 |
|
RU2530368C1 |
| КАЛИТКА | 2013 |
|
RU2538518C1 |
| ПОЛНОРОСТОВЫЙ ТУРНИКЕТ | 2009 |
|
RU2408773C1 |
| КАЛИТКА | 2009 |
|
RU2403365C1 |
| ТУРНИКЕТ | 2009 |
|
RU2387782C1 |
| Полноростовой четырёхлопастный роторный турникет-шлюз | 2017 |
|
RU2670267C1 |
Предлагаемое изобретение относится к способу управления работой турникета, используемого для контролируемого пропуска людей. Способ управления работой турникета для контролируемого пропуска людей содержит вращающийся вокруг жестко установленной в турникете оси поворотный узел с расходящимися от его оси преграждающими органами, которые при штатной работе турникета вследствие вращения поворотного узла вокруг его оси переводят последовательно из одной, преграждающей проход, позиции в другую поворотную позицию, освобождающую проход, а в случае мешающего нормальной работе события, например сбоя электропитания, преграждающий орган, стоящий в преграждающей позиции, может перемещаться из преграждающего положения «проход закрыт» в нерабочее положение «проход открыт», причем после устранения причины, вызывающей перемещение преграждающего органа, стоящего в преграждающем положении «проход закрыт», в нерабочее положение «проход открыт», этот орган устанавливают обратно в свое рабочее положение путем воздействия возвратных усилий относительно оси преграждающего органа и разъемно фиксируют в этом рабочем положении. Приводное соединение каждого преграждающего органа с электроприводом выполнено с возможностью расцепления и в случае наступления мешающего нормальной работе события преграждающий орган, стоящий в преграждающей позиции, автоматически переводят из преграждающего пропуск людей положения «проход закрыт» в нерабочее положение «проход открыт» независимо от момента наступления такого события, а после устранения причины, вызвавшей нарушение нормальной работы турникета, возвратные усилия, вызывающие возврат находящегося в нерабочем положении преграждающего органа в его рабочее преграждающее положение «проход закрыт», проводят путем поворота органа вокруг его оси в поворотном узле при неподвижном поворотном узле и направляют для воздействия на преграждающий орган, находящийся в нерабочем положении, от электропривода через механическую передачу, расцепляемую после выполнения своей задачи; при этом одновременно с подъемом преграждающего органа в его рабочее положение с помощью того же электропривода выполняют возврат в исходное положение механизма опускания преграждающего органа после его срабатывания, а после завершения вышеуказанных операций выполняют реверс электропривода в исходное состояние. Техническим результатом изобретения является сокращение расхода энергоресурсов и повышение надежности турникета. 4 ил.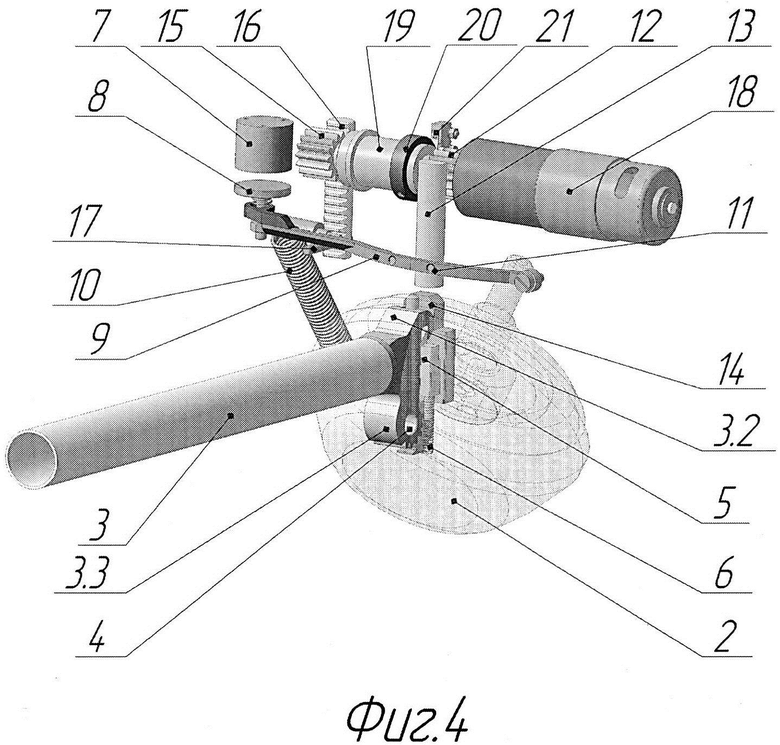
Способ управления работой турникета для контролируемого пропуска людей, содержащего вращающийся вокруг жестко установленной в турникете оси поворотный узел с расходящимися от его оси преграждающими органами, которые при штатной работе турникета вследствие вращения поворотного узла вокруг его оси переводят последовательно из одной, преграждающей проход, позиции в другую поворотную позицию, освобождающую проход, а в случае мешающего нормальной работе события, например сбоя электропитания, преграждающий орган, стоящий в преграждающей позиции, может перемещаться из преграждающего положения «проход закрыт» в нерабочее положение «проход открыт», причем после устранения причины, вызывающей перемещение преграждающего органа, стоящего в преграждающем положении «проход закрыт», в нерабочее положение «проход открыт», этот орган устанавливают обратно в свое рабочее положение путем воздействия возвратных усилий относительно оси преграждающего органа и разъемно фиксируют в этом рабочем положении, отличающийся тем, что приводное соединение каждого преграждающего органа с электроприводом выполнено с возможностью расцепления и в случае наступления мешающего нормальной работе события преграждающий орган, стоящий в преграждающей позиции, автоматически переводят из преграждающего пропуск людей положения «проход закрыт» в нерабочее положение «проход открыт» независимо от момента наступления такого события, а после устранения причины, вызвавшей нарушение нормальной работы турникета, возвратные усилия, вызывающие возврат находящегося в нерабочем положении преграждающего органа в его рабочее преграждающее положение «проход закрыт», проводят путем поворота органа вокруг его оси в поворотном узле при неподвижном поворотном узле и направляют для воздействия на преграждающий орган, находящийся в нерабочем положении, от электропривода через механическую передачу, расцепляемую после выполнения своей задачи; при этом одновременно с подъемом преграждающего органа в его рабочее положение с помощью того же электропривода выполняют возврат в исходное положение механизма опускания преграждающего органа после его срабатывания, а после завершения вышеуказанных операций выполняют реверс электропривода в исходное состояние.
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТУРНИКЕТНОГО УСТРОЙСТВА | 1994 |
|
RU2130540C1 |
| Опалубка для штукатурных работ | 1938 |
|
SU57790A1 |
| Способ крепления трубчатого щеткодержателя электрической машины | 1957 |
|
SU114711A1 |
| Композиция для получения пенопласта | 1978 |
|
SU718460A1 |

