Настоящее изобретение относиться к области солнечной энергетики и может найти применение при конструировании и изготовлении автоматизированных установок с концентраторными фотоэлектрическими модулями.
Известна система управления платформой фотопреобразователей солнечного излучения (см. патент US 4361758, МПК G01J 1/20, опубликован 30.11.1982), состоящая из матричного оптического датчика, электронного блока анализа и команд, двух моторов с механическими редукторами и двух датчиков абсолютных углов поворота. Оптический солнечный датчик, жестко закрепленный на платформе, выполнен в виде отдельных светочувствительных приемников излучения, расположенных дискретно на полусферической подложке. Для максимального использования подложки применена ромбовидная форма отдельного приемника. Угловое положение каждого элемента датчика строго фиксировано и записано в электронном блоке. Выход каждого светочувствительного элемента посредством электрических шин и развязывающих диодов соединен в общую сеть, которая подключена к декодирующему электронному блоку. На выходе блока имеются два независимых канала управления вращением платформы: азимутальный и зенитальный. При движении Солнца по небосводу отдельные элементы датчика освещаются различно, и блок анализа входных сигналов определяет элемент с максимальным сигналом. Далее командный блок, зная угловые координаты этого отдельного элемента и имея информацию от датчиков абсолютных углов поворота платформы, формирует соответствующие импульсы для каждого из электродвигателей. Полярность управляющего импульса и, соответственно, сторона, в которую будет поворачиваться платформа, определяется, исходя из того, какой из двух рядом расположенных сенсоров освещается сильнее.
Недостатками известной системы управления платформой являются невысокая точность слежения (порядка 2°), обусловленная значительными геометрическими размерами как самих светочувствительных элементов, так и большими технологическими промежутками между ними. Кроме того, использованная электронная система обработки информации и формирования управляющих импульсов очень сложна и не обеспечивает движение платформы при затенении Солнца, что увеличивает время подстройки и, соответственно, снижает количество производимой энергии.
Известна установка слежения за Солнцем (см. патент US 8389918, МПК G01C 21/02, H01J 40/14, G06M 7/00, опубликован 05.03.2013), которая состоит из основания, платформы с солнечными панелями, двумя гидравлическими линейными актуаторами, соединяющими основание и платформу, солнечного датчика на платформе и центрального процессора, который обрабатывает сигналы датчика и вырабатывает сигналы управления на линейные актуаторы, приводящие во вращение платформу с солнечными модулями.
Недостатком известной установки является сложная конструкция датчика, который совмещает в себе датчик грубой настройки на Солнце (для возможности захвата солнечного излучения оптической системой точного датчика) и точный датчик, работающий в очень узком угловом диапазоне. Кроме того, процессору управления требуются датчики позиционирования платформы при восходе и заходе Солнца.
Известна система слежения за Солнцем (см. патент KR 101275244, МКП F24J 2/54, H02S 20/32, опубликован 17.06.2013), состоящая из: основной рамы с вертикальным валом, платформы с возможностью поворота вокруг горизонтальной оси, солнечных панелей, смонтированных на этой платформе, оптического цилиндрического датчика азимутального угла поворота вертикального вала, оптического цилиндрического датчика зенитального угла поворота платформы с модулями вокруг горизонтальной оси, оптического датчика Солнца и контроллера, обеспечивающего точное направление солнечных модулей на Солнце в течение всего светового дня и возврат платформы в начальное положение при восходе Солнца при помощи системы электрических приводов. Контроллер получает сигналы от оптических цилиндрических датчиков азимутального и зенитального углов поворота панели модулей и от датчика Солнца, обрабатывает эти данные и выдает сигналы на исполнительные двигатели для точного сопровождения Солнца.
Недостатком такой системы является сложная конструкция оптического датчика Солнца, который должен обеспечить, во-первых, широкий угол захвата солнечного излучения для случая сильного рассогласования направления платформы по отношению к солнечному диску, а во-вторых, узкую полосу захвата для точного сопровождения Солнца. Фактически это достигается размещением двух оптических датчиков в одном корпусе.
Известна система управления платформой фотопреобразователей солнечного излучения (см. заявка CN 104679025, МПК G05D 3/12, опубликована 03.06.2015), которая рассматривает автоматическую систему управления для солнечной панели. Система состоит из следующих элементов: оптический датчик Солнца, цифровой сигнальный процессор, двухканальный силовой блок шаговых двигателей и два шаговых электродвигателя. В качестве датчика предложено использовать стандартную CCD камеру с разрешением 640×480 пикселей и размером матрицы 3,4×4,5 мм2. Камеру неподвижно монтируют на платформе с модулями и юстируют таким образом, чтобы оптическая ось камеры была точно установлена перпендикулярно плоскости модулей. Сигнал с камеры поступает на сигнальный процессор, который по положению края солнечного диска рассчитывает координаты его центра. Алгоритм программы работы контроллера системы наведения построен таким образом, чтобы координаты рассчитанного центра всегда находились в центре матрицы приемника. По отклонению рассчитанных координат диска от центра матрицы контроллер формирует управляющие сигналы для шаговых двигателей, которые начинают поворачивать платформу по азимутальному и зенитальному углам. Вследствие этого изображение диска Солнца перемещается по матрице в направлении ее центра. Когда ошибка отклонения станет равна нулю, платформа останавливается. Это положение является оптимальным для выработки максимальной мощности солнечной батареи.
Недостатками известного технического решения являются применение CCD камеры, требующей использования сложного алгоритма обработки аналогового сигнала. Начальная ручная настройка положения камеры по отношению к плоскости модулей требует периодической проверки и подстройки. Также требуется ручное позиционирование панели на восход Солнца ввиду того, что простейший расчет угла захвата примененного оптического датчика не превышает величины порядка 48°, что явно недостаточно для автоматического захвата восходящего Солнечного диска из положения панели на заходе Солнца.
Известна система управления платформой фотоэлектрических модулей (см. заявка CN 204462868, МПК G05D 3/12, опубликована 08.07.2015), состоящая из смонтированных на платформе с фотоэлектрическими модулями оптического датчика, микрокомпьютера, двух драйверов коллекторных электродвигателей, самих электродвигателей, соединенных с червячными редукторами, механической турели, способной поворачиваться вокруг двух взаимно перпендикулярных осей вращения и источника питания всей установки. Оптический датчик представляет собой CMOS камеру, установленную на платформе с модулями. Светочувствительная матрица камеры имеет разрешение 1300×1028 пикселей, размер каждого составляет 3,18×3,18 мкм2. Фокусное расстояние объектива камеры равно 4,85 мм. Направление оптической оси камеры составляет угол 90° по отношению к плоскости панели. Цифровой сигнал с выхода камеры поступает на 32-разрядный контроллер. Контроллер рассчитывает положение текущего изображения солнечного диска на матрице и сравнивает рассчитанную координату с координатой положения солнечного диска при строго перпендикулярном падении солнечных лучей, запомненной в памяти контроллера при первоначальной юстировке датчика.
Недостатком известной системы управления платформой фотоэлектрических модулей является отсутствие возможности автоматически позиционировать платформу на восход Солнца после его захода за горизонт на закате. Кроме того, процесс остановки сопровождения Солнца при его затенении приводит к увеличению времени, требуемого для точного захвата Солнца после появления светила из-за облаков. В случае длительного затенения возможен выход Солнца за пределы угла захвата датчика, который составляет порядка 40°, что потребует ручной настройки системы.
Известна система управления платформой концентраторных солнечных модулей (см. патент US 9182471, МПК G01J 1/20, G01S 3/786, F24J 2/38 G05D 3/10, H01L 31/042, опубликован 10.11.2015), включающая фотоэлектрические модули, смонтированные на жесткой платформе и электрически объединенные в единый массив, электронный блок определения выходных параметров массива модулей, микроконтроллер с логикой и памятью, силовой блок для управления электродвигателями постоянного тока на 2 канала, два электродвигателя с механическими редукторами, выходные валы которых жестко связаны каждый со своей осью поворота платформы, и два датчика углов поворота выходных валов этих редукторов.
Недостатками известной системы управления платформой концентраторных солнечных модулей является обязательная каждодневная процедура позиционирования платформы в положение на восход Солнца и, кроме того, значительные потери количества вырабатываемой энергии в результате увеличенного времени на поиск и грубый захват солнечного диска после появления последнего из-за горизонта или из-за туч.
Наиболее близким по совокупности существенных признаков к настоящему решению является система управления платформой концентраторных солнечных модулей (см. патент US 7079944, МКП G01C 21/26, опубликован 24.02.2005), принятая за прототип. Известная система-прототип содержит платформу с концентраторными каскадными модулями, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу, первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу, второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными каскадными модулями вокруг двух взаимно перпендикулярных плоскостей, блок питания, центральный блок управления с блоком памяти, содержащий контроллер, в качестве которого использован 12 битный, с АЦП преобразователем микроконтроллер MSP430F149 фирмы Texas Instruments, с программой, рассчитывающей в реальном режиме времени положение Солнца по введенным в блок памяти координатам станции, дате и точном времени наблюдения, GPS приемник и оптический солнечный датчик. В известной системе для грубой настройки на Солнце, когда последнее скрыто за облачностью, используют способ управления азимутальным и зенитальным приводами по программе, заложенной в микроконтроллер, которая через определенные интервалы времени рассчитывает теоретическое местоположение солнца с точностью ±2 угловых градуса. Информацию об углах, под которыми платформа направлена на небосвод, определяют с помощью GPS приемника. По внутренним часам микроконтроллера и данных с GPS приемника блок управления рассчитывает текущее направление платформы и теоретическое положение Солнца и вырабатывает сигналы о величине рассогласования по азимутальному и зенитальному углах с учетом местоположения платформы (широта, долгота, высота над уровнем моря), после чего первым и вторым электродвигателями производится соответствующая переориентация платформы до момента, когда углы рассогласования не станут равны нулю. В случае прямого солнечного излучения при выходе Солнца из-за облаков управление платформой переходит на управление от оптического солнечного датчика. В этом случае блок управления системы получает входные данные от оптического солнечного датчика, расположенного на платформе с концентраторными каскадными модулями, и выдает подстраивающие сигналы на силовой блок, подающий электропитание на первый и второй электродвигатели, для точной настройки платформы с солнечными модулями на Солнце. В этом случае точность позиционирования достигает величины ±0,01 угловых градусов. В качестве оптического солнечного датчика в известной системе-прототипе использована CCD матрица фотоприемников солнечного излучения, выполненная из 8 фототранзисторов, симметрично расположенных в четырех квадрантах. Матрица фотоприемников расположена на фокусном расстоянии от входного объектива оптического солнечного датчика.
Недостатком известной системы управления платформой концентраторных солнечных модулей является отсутствие возможности сопровождения Солнца при малых освещенностях оптического солнечного датчика и наличии диффузной (рассеянное солнечное излучение) составляющей солнечной радиации. Это случается в случае затенения Солнца тучами или появления сильной дымки. В таких случаях система останавливается, что приводит к увеличенному времени поиска Солнца после выхода последнего из-за облаков и, как следствие, к потере общей энергии, вырабатываемой станцией. Кроме того, использование в оптическом солнечном датчике в качестве приемников солнечного излучения 8 отдельных фототранзисторов приводит к усложнению технологии построения самого приемника: необходимо использовать несколько фокусирующих объективов и применять сложный алгоритм вычисления направления оптической оси всей платформы по соотношению сигналов с отдельных приемников оптического излучения. Следует также отметить, что применение датчиков такого типа требует проведения сложной процедуры очень точной юстировки положения датчика как в начальный период времени, так и периодически на протяжении всего срока службы станции.
Задачей, на решение которой направлено заявляемое изобретение, является разработка такой системы управления платформой концентраторных солнечных модулей, которая обеспечивала бы увеличение КПД солнечной установки за счет сопровождения солнечного диска с заданной точностью независимо от различных погодных условий (дымка, облачность) и сводила бы к минимуму время поиска и точного наведения на солнечный диск на протяжении всего срока службы установки.
Поставленная задача решается тем, что система управления платформой концентраторных солнечных модулей содержит платформу с концентраторными каскадными солнечными модулями, оптический солнечный датчик, выполненный в виде CMOS матрицы, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу, первый силовой блок и первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу, второй силовой блок и второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными солнечными модулями вокруг двух взаимно перпендикулярных плоскостей, центральный блок управления с блоком памяти, содержащий контроллер с первой программой, рассчитывающей в режиме реального времени координаты Солнца по введенным в память контроллера координатам солнечной станции, дате, высоте над уровнем моря и точном времени наблюдения, второй программой, рассчитывающей направления оси платформы по сигналам датчиков положения платформы, третьей программой, рассчитывающей усредненную угловую скорость вращения платформы по сигналам датчиков числа оборотов первого и второго электродвигателей, четвертой программой, управляющей процессом мониторинга значения максимальной выходной мощности концентраторных солнечных модулей солнечной установки, пятой программой, выделяющей центральную точку яркостного сигнала оптического солнечного датчика и рассчитывающей координаты этой точки на CMOS матрице оптического солнечного датчика, и шестой программы, рассчитывающей сигнал ошибки, поступающий на первый и второй силовые блоки, блок часов реального времени, датчик числа оборотов первого электродвигателя, датчик числа оборотов второго электродвигателя. Выходы датчика положения платформы по азимутальному углу, датчика положения платформы по зенитальному углу, оптического солнечного датчика, датчика числа оборотов первого электродвигателя, датчика числа оборотов второго электродвигателя и блока часов реального времени соединены с соответствующими входами центрального блока управления. Первый и второй выходы центрального блока управления подключены к входам соответственно первого и второго силовых блоков, выходы которых соединены соответственно с первым и вторым электродвигателями.
Новым в системе управления платформой концентраторных солнечных модулей является включение в ее состав датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя и выполнение оптического солнечного датчика в виде CMOS матрицы. Заложенные в контроллер настоящей системы программы обеспечивают периодическую самокалибровку оптического солнечного датчика, осуществляемую при помощи автоматического сканирования положения платформы около точки положения максимальной яркости солнечного пятна на светочувствительной CMOS матрице датчика и одновременного измерения выходных параметров солнечной установки. Это позволяет, во-первых, полностью отказаться от каких-либо ручных подстроек положения оптического солнечного датчика относительно поверхности платформы с концентраторными солнечными модулями и, во-вторых, обеспечить режим работы солнечной установки при максимально возможном коэффициенте полезного действия (КПД) на протяжении всего запланированного срока службы (до 25 лет) солнечной установки. Кроме того, повышение точности сопровождения Солнца при его затенении достигается также с помощью датчиков числа оборотов электродвигателей. Повышение точности сопровождения Солнца достигается также с помощью датчика оборотов первого электродвигателя и датчика оборотов второго электродвигателя, по показаниям которых центральный блок управления в течение всего времени слежения за Солнцем по оптическому солнечному датчику рассчитывает усредненные угловые скорости поворота платформы в азимутальном и в зенитальном направлениях для каждого управляющего импульса в отдельности и сохраняет эти данные в блоке памяти в течение определенного, заданного программой, интервала времени. При затенении Солнца сопровождение продолжается по заложенной в контроллер программе, но с использованием последних, сохраненных в блоке памяти значений, усредненных угловых скоростей поворота платформы в азимутальном и в зенитальном направлениях, что обеспечивает возможность точного сопровождения Солнца даже в случае появления на небе дымки или облачности.
Настоящее изобретение поясняется чертежами, где:
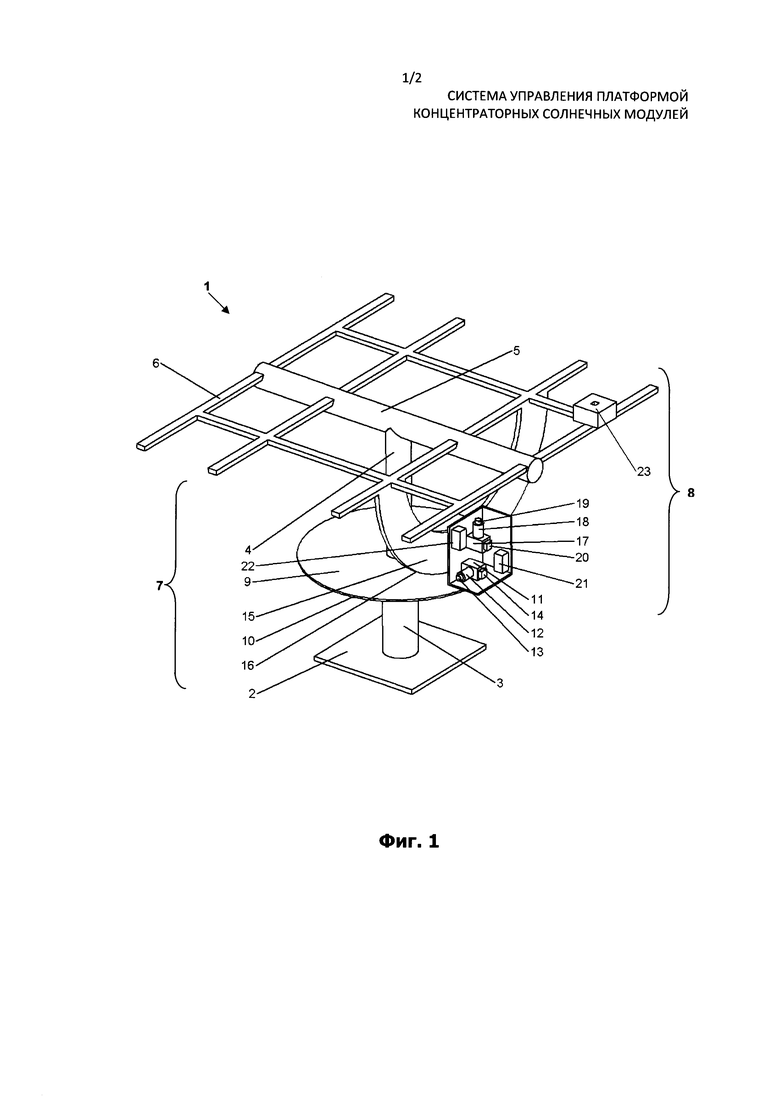
на фиг. 1 показан общий вид в аксонометрии системы управления платформой концентраторных солнечных модулей (со снятыми концентраторными солнечными модулями);
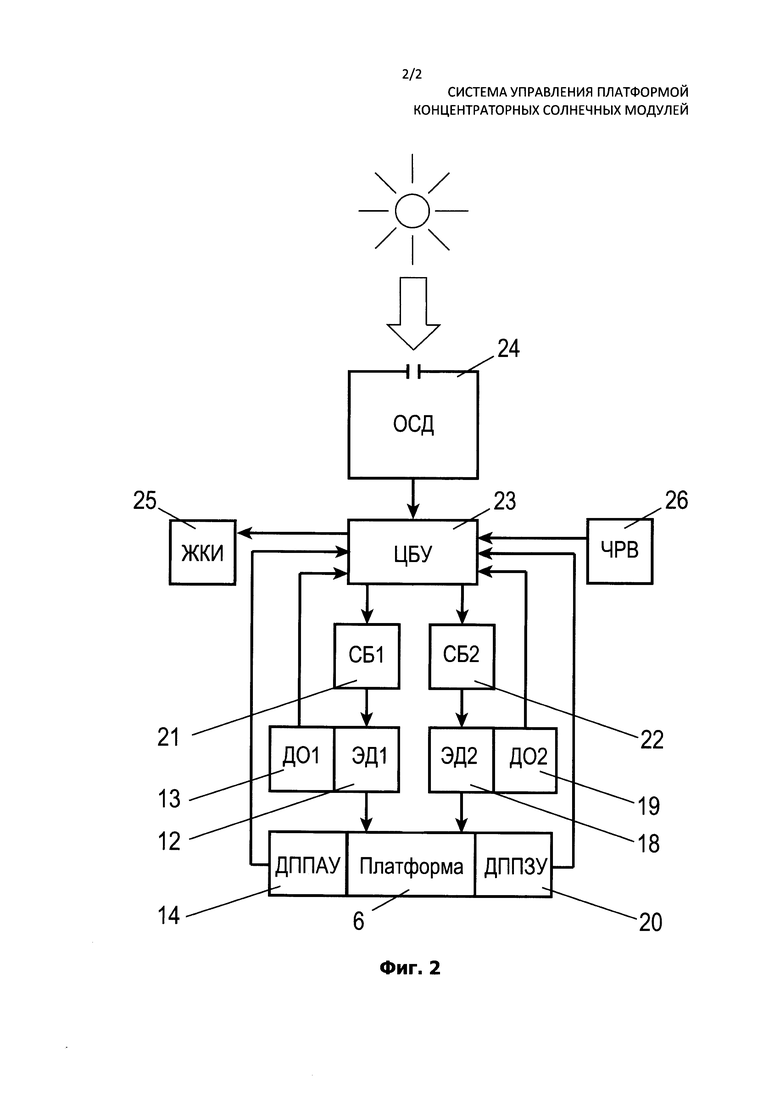
на фиг. 2 приведена блок-схема электрической части системы управления платформой концентраторных солнечных модулей.
Система 1 управления платформой концентраторных солнечных модулей (см. фиг. 1, фиг. 2) содержит установленную на основании 2 неподвижную вертикальную колонну 3, на верхний торец которой надета с возможностью вращения труба 4, на верхней части которой установлена с возможностью вращения вокруг своей оси горизонтальная труба 5, на которой закреплена платформа 6 для установки на ней концентраторных каскадных модулей (на чертеже не показаны). Система 1 включает также подсистему 7 азимутального вращения и подсистему 8 зенитального вращения. Подсистема 7 азимутального вращения включает закрепленный на вертикальной колонне 3 горизонтальный диск 9 с однорядной роликовой цепью 10, приваренной по торцу диска 9. В контакте с цепью 10 находится ведущая звездочка редуктора 11, например механического, жестко связанного с первым электродвигателем 12 (ЭД1), снабженного датчиком 13 числа оборотов (ДО1). На корпусе редуктора 11 установлен датчик 14 положения платформы по азимутальному углу (ДППАУ). Подсистема 8 зенитального вращения содержит прикрепленный снизу к платформе 6 вертикальный сектор 15 с круговой торцевой поверхностью 16. На поверхности 16 приварена однорядная цилиндрическая цепь, в контакт с которой входит ведущая звездочка, насаженная на вал редуктора 17, например, механического, жестко связанного со вторым электродвигателем 18 (ЭД2), снабженного датчиком 19 числа оборотов (ДО2). На корпусе редуктора 17 установлен датчик 20 положения платформы по зенитальному углу (ДППЗУ). В качестве угловых датчиков ДППАУ 14 и ДППЗУ 20 могут быть применены 10-битные магнитные энкодеры, например серии AS5040, оси которых жестко связаны с осями соответствующих редукторов 11, 17. В состав системы 1 входят также первый силовой блок 21 (СБ1) и второй силовой блок 22 (СБ2) для электропитания соответственно ЭД1 12 и ЭД2 18. Центральный блок 23 управления (ЦБУ) положением платформы может быть разработан, например, на основе платы Arduino Due, содержащий процессор Atmel SAM3X8E ARM Cortex-M3. Система 1 содержит также оптический солнечный датчик 24 (ОСД), в качестве которого использована стандартная видеографическая (VGA) камера с матрицей из комплементарных металл-оксидных транзисторов (CMOS матрица). Система 1 может содержать жидкокристаллический индикатор 25 (ЖКИ), для отображения данных по вырабатываемой мощности и предупреждения оператора о снижении последней ниже допустимого значения. В состав системы 1 входит блок 26 часов реального времени (ЧРВ), рассчитанный на все время эксплуатации солнечной установки. Выходы ОСД 24, ДППАУ 14, ДППЗУ 20, ДО1 13, ДО2 19 и ЧРВ 26 соединены с соответствующими входами ЦБУ 23. Первый и второй выходы ЦБУ 23 подключены к входам соответственно СБ1 21 и СБ2 22, выходы которых соединены соответственно с ЭД1 12 и ЭД2 18. Выходные валы ЭД1 12 и ЭД2 18 жестко связаны с редукторами 11 и 17. Находящиеся в ЦБУ 23 первая программа рассчитывает в режиме реального времени координаты Солнца по введенным в память контроллера координатам солнечной станции, дате, высоте над уровнем моря и точном времени наблюдения; вторая программа рассчитывает направления оси платформы 6 по сигналам ДППАУ 14 и ДППЗУ 20; третья программа рассчитывает усредненную угловую скорость вращения платформы 6 по сигналам ДО1 13 и ДО2 19; четвертая программа управляет процессом мониторинга значения максимальной выходной мощности концентраторных солнечных модулей солнечной установки; пятая программа выделяет центральную точку яркостного сигнала ОСД 24 и рассчитывает координаты этой точки на CMOS матрице ОСД 24, а шестая программа рассчитывает сигнал ошибки, поступающий на СБ1 21 и СБ2 22. Таким образом, ЦБУ 23 выполняет следующие функции: формирует команды на точное (±0,1°) сопровождение Солнца в режиме реального времени по ОСД 24; формирует команды на грубое позиционирование платформы 6 с точностью ±2°, по расчету в режиме реального времени значений текущих координат Солнца; формирует управляющие сигналы для движения платформы 6 по усредненной угловой скорости вращения валов ЭД1 12 и ЭД2 18; осуществляет процесс периодической самокалибровки ОСД 24; проводит измерения величин тока и напряжения на нагрузке солнечной станции и рассчитывает по этим данным электрическую мощность, вырабатываемой солнечной станцией; с помощью ОСД 24 измеряет прямую и рассеянную солнечную радиацию и анализирует соотношения интенсивностей этих величин.
Применение матричной VGA камеры в качестве ОСД 24 предоставляет существенные преимущества перед другими типами датчиков. В частности, отсутствует жесткое требование точной юстировки по двум углам перпендикулярного положения оптической оси ОСД 24 по отношению к поверхности концентраторных солнечных модулей. Достаточно один раз выставить ось ОСД 24 с точностью 90°±2° и в дальнейшем, на всем протяжении времени эксплуатации солнечной станции, ЦБУ 23 будет автоматически учитывать неточность первоначальной юстировки оси ОСД 24. Современная VGA камера является недорогим малогабаритным устройством, содержащим светочувствительную матрицу CMOS и микропроцессор для обработки сигнала и преобразования его в цифровой формат. Вместо объектива, на поверхности ОСД 24 помещается непрозрачная диафрагма с отверстием для прохождения солнечного излучения. Расстояние от диафрагмы до светочувствительной поверхности ОСД 24 выбирают, исходя из геометрических размеров светочувствительной матрицы и необходимой величины угла зрения (угла захвата) ОСД 24. Для стандартной VGA матрицы с размером всего сенсора 3,4×4,5 мм2 и требуемым значением угла зрения ОСД 24, равным примерно 50°, расстояние до диафрагмы составляет величину порядка 5 мм. Размер отверстия диафрагмы определяется чувствительностью камеры и для CMOS матрицы составляет величину примерно 0,05-0,1 мм. Яркостной сигнал изображения солнечного диска снимается с отдельных пикселей матрицы в аналоговом виде и через буферные усилители каждого пикселя поступает на вход аналого-цифрового преобразователя, а затем на микропроцессор камеры. Последний обрабатывает сигнал и преобразовывает формат VGA в параллельный интерфейс. Таким образом, на выходе ОСД 24 получают яркостной сигнал в цифровом виде, который поступает на вход ЦБУ 23.
Система 1 управления платформой концентраторных фотоэлектрических модулей (см. фиг. 1 и фиг. 2). Первоначально, при размещении солнечной станции в какой-либо точке земного шара в память ЦБУ 23 заносят точные координаты расположения станции, высоту ее расположения над уровнем моря, и настраивают ЧРВ 26. На основании этих данных процессор ЦБУ 23 с точностью ±2° в дальнейшем может рассчитать текущие угловые координаты Солнца, под которыми оно "перемещается" относительно солнечной станции в любой заданный момент времени. На начальном этапе восхода Солнца платформу 6 с концентраторными солнечными модулями ориентируют таким образом, чтобы "оптическая ось" платформы 6 с точностью ±2° была направлена в точку восхода. Происходит это по команде ЦБУ 23, который рассчитывает сигнал ошибки по азимутальному и зенитальному углам, исходя из сравнения данных от ДППАУ 14, ДППЗУ 20 и данных угловых координат Солнца, рассчитываемых на текущее время восхода. Далее, при появлении из-за горизонта солнечного диска, излучение последнего захватывает ОСД 24 (угол захвата 50°) и система 1 переходит в режим точного слежения за Солнцем по ОСД 24 в режиме реального времени. Процесс точного слежения продолжается непрерывно, вплоть до момента захода Солнца за горизонт. Далее платформа 6 с концентраторными солнечными модулями возвращается в первоначальную позицию и вновь "ожидает" момент восхода Солнца. Управление по ОСД 24 происходит всегда, когда на приемной матрице ОСД 24 присутствует прямое солнечное излучение. Мониторинг наличия этого излучения осуществляется посредством анализа формы и амплитуды яркостного сигнала изображения солнечного диска и амплитуды сигнала в пикселях матрицы ОСД 24 вне этого изображения. При снижении этого соотношения ниже заданной величины, что происходит, например, в случае появления временно затеняющих Солнце помех, таких как облака или сильная пыль, дымка, ЦБУ 23 переводит сопровождение Солнца системой 1 на управление по программе с усредненными значениями угловых скоростей валов ЭД1 12 и ЭД2 18, заложенной в контроллер ЦБУ 23. Это предотвращает сильное отклонение направления платформы от истинного положения Солнца в направлении на ложные яркие пятна, возникающие на небе, вследствие рассеяния солнечного излучения на отдельных сильных оптических неоднородностях помех. Сопровождение Солнца системой 1, по заложенной в контроллер ЦБУ 23 программе с усреднением, осуществляется с использованием усредненных за несколько импульсов управления значений угловых скоростей поворота платформы 6, рассчитанных контроллером по количеству оборотов ЭД1 12 и ЭД2 18 в азимутальном и в зенитальном направлениях, которые записывались в блок памяти ЦБУ 23 в последний временной интервал перед моментом затенения Солнца. Если затенение Солнца продолжается длительное время (более 5 минут), то ЦБУ 23 переводит процесс управления платформой 6 по программе грубого сопровождения (точность ±2°) траектории движения Солнца с расчетом по алгоритму. Движение платформы 6 по программе с усредненными значениями угловых скоростей или по программе "грубого" сопровождения осуществляется до момента появления прямого солнечного излучения, и далее сопровождение платформой 6 за солнечным диском переходит на управление с точностью не хуже 0,1° по сигналам с ОСД 24, обрабатываемым в ЦБУ 23. Рассмотрим процесс самокалибровки ОСД 24 на примере одного концентраторного солнечного модуля. Процессор ЦБУ 23 дает команду на процесс самокалибровки. Платформа 6 с модулем(ями) с помощью ОСД 24 точно направлена на Солнце и стоит неподвижно. Включается частотный режим (частота 1 кГц) снятия вольтамперной характеристики модуля и расчета по этим данным величины максимального значения выходной мощности модуля. Прямое солнечное излучение при этом сфокусировано на поверхность каждого фотопреобразователя, размещенного внутри концентраторного солнечного модуля. Одновременно излучение проходит через входную диафрагму ОСД 24 и образует на матрице светочувствительных пикселей изображение в виде яркого пятна с центром, который соответствует центру солнечного диска. Яркостной сигнал с ОСД 24 в цифровом виде поступает на вход процессора ЦБУ 23. Процессор, по краям этого изображения, рассчитывает его центр. Далее вычисляются и записываются в блок памяти координаты этого центра в системе координат, связанной с матрицей. При движении Солнца по небосводу центр пятна смещается по матрице ОСД 24, и контроллер ЦБУ 23 вычисляет новые координаты этого центра и также заносит их в блок памяти. Такой процесс расчета и запоминания продолжается на всем протяжении движения Солнца по небосводу и происходит дискретно с частотой 1 кГц. Синхронно со смещением яркостного пятна по поверхности матрицы ОСД 24 смещается и сфокусированное пятно солнечной радиации по поверхности каждого фотопреобразователя, размещенного внутри модуля. Как только солнечное пятно, имеющее конечный размер, начнет выходить за физический край фотопреобразователя, выходная мощность, генерируемая модулем, начинает уменьшаться, что фиксируется контроллером ЦБУ 23. При обнаружении падения выходной мощности солнечной станции ниже определенного предела (5%), контроллер ЦБУ 23 дает команду на движение платформы 6 в сторону смещения яркостного пятна на матрице ОСД 24. Движение платформы 6, сопровождающееся процессом расчета и запоминания выходной мощности, продолжается до тех пор, пока величина мощности не начнет уменьшаться и достигнет значения 0,95 от максимального значения. Контроллер ЦБУ 23 останавливает платформу 6 и далее возвращает ее в положение, соответствующее среднему значению координат, при которых наблюдалась максимальная выходная мощность модуля. Мониторинг выходных параметров модуля с частотой 1 кГц прекращается. Контроллер ЦБУ 23 запоминает это оптимальное положение центра яркостного пятна на матрице ОСД 24. Процесс самокалибровки ОСД 24 на этом заканчивается. Дальнейший мониторинг выходной мощности происходит с пониженной частотой (10 Гц). Движение Солнца вновь приводит к тому, что сфокусированное изображение солнечного диска начинает выходить с поверхности фотопреобразователя. Как только выходная мощность модуля уменьшается на 5%, контроллер ЦБУ 23 подает команду на вращение платформы 6 вокруг двух осей до тех пор, пока текущие координаты центра пятна на матрице ОСД 24 не совпадут с координатами, запомненными для положения платформы 6 в режиме выработки максимальной мощности, после этого платформа 6 останавливается. Такой процесс периодического подстройки положения платформы 6 вслед за движением Солнца продолжается до момента очередной команды контроллера ЦБУ 23 на начало запуска процесса самокалибровки ОСД 24. Периодичность команды составляет порядка 1 часа. Далее все продолжается в том же порядке. Точность сопровождения платформы 6 по матричному ОСД 24 составляет величину не хуже 0,1°. Необходимо отметить, что процесс самокалибровки ОСД 24 позволяет эксплуатировать солнечную станцию в режиме максимально возможной выходной мощности в течение всего срока службы установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ФОТОЭНЕРГОУСТАНОВКИ | 2014 |
|
RU2579169C1 |
| Автономная мобильная фотоэлектростанция | 2023 |
|
RU2805773C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ЭНЕРГОУСТАНОВКИ | 2016 |
|
RU2625604C1 |
| СОЛНЕЧНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2008 |
|
RU2377472C1 |
| СОЛНЕЧНАЯ КОНЦЕНТРАТОРНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2476956C1 |
| ФОТОЭНЕРГОУСТАНОВКА | 2007 |
|
RU2354896C1 |
| СОЛНЕЧНАЯ ФОТОЭНЕРГОУСТАНОВКА | 2011 |
|
RU2476957C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ ФОТОЭНЕРГОУСТАНОВКИ | 2011 |
|
RU2488046C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ | 2013 |
|
RU2544896C1 |
| СОЛНЕЧНЫЙ ФОТОЭЛЕКТРОГЕНЕРАТОР | 2022 |
|
RU2791962C1 |
Система управления платформой концентраторных солнечных модулей содержит платформу (6) с концентраторными каскадными солнечными модулями, оптический солнечный датчик (24), выполненный в виде CMOS матрицы, подсистему (7) азимутального вращения, подсистему (8) зенитального вращения, включающую датчик положения платформы по зенитальному углу, центральный блок (23) управления, содержащий контроллер, блок (26) часов реального времени, датчик (13) числа оборотов первого электродвигателя (12), датчик (19) числа оборотов второго электродвигателя (18). Система обеспечивает увеличение КПД солнечной установки и сводит к минимуму время поиска и точного наведения на солнечный диск на протяжении всего срока службы солнечной установки. 2 ил.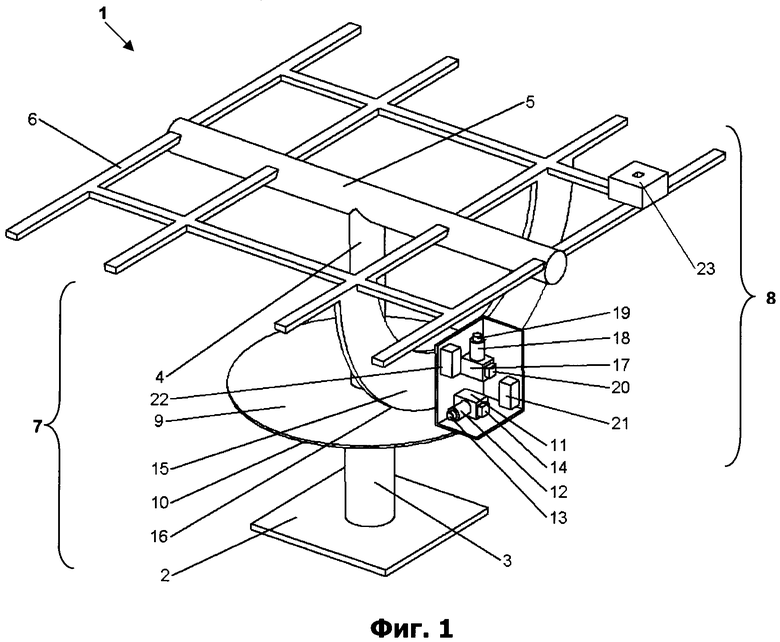
Система управления платформой концентраторных солнечных модулей, содержащая платформу с концентраторными каскадными солнечными модулями, оптический солнечный датчик, выполненный в виде CMOS матрицы, подсистему азимутального вращения, включающую датчик положения платформы по азимутальному углу, первый силовой блок и первый электродвигатель с первым редуктором, подсистему зенитального вращения, включающую датчик положения платформы по зенитальному углу, второй силовой блок и второй электродвигатель со вторым редуктором, которые обеспечивают вращение платформы с концентраторными солнечными модулями вокруг двух взаимно перпендикулярных плоскостей, центральный блок управления с блоком памяти, содержащий контроллер с первой программой, рассчитывающей в режиме реального времени координаты Солнца по введенным в память контроллера координатам солнечной станции, дате, высоте над уровнем моря и точному времени наблюдения, второй программой, рассчитывающей направления оси платформы по сигналам датчиков положения платформы, третьей программой, рассчитывающей усредненную угловую скорость вращения платформы по сигналам датчиков числа оборотов первого и второго электродвигателей, четвертой программой, управляющей процессом мониторинга значения максимальной выходной мощности концентраторных солнечных модулей солнечной установки, пятой программой, выделяющей центральную точку яркостного сигнала оптического солнечного датчика и рассчитывающей координаты этой точки на CMOS матрице оптического солнечного датчика, и шестой программы, рассчитывающей сигнал ошибки, поступающий на первый и второй силовые блоки, блок часов реального времени, рассчитанный на все время эксплуатации станции, датчик числа оборотов первого электродвигателя, датчик числа оборотов второго электродвигателя, при этом выходы датчика положения платформы по азимутальному углу, датчика положения платформы по зенитальному углу, оптического солнечного датчика, датчика числа оборотов первого электродвигателя, датчика числа оборотов второго электродвигателя и блока часов реального времени соединены с соответствующими входами центрального блока управления, а первый и второй выходы центрального блока управления подключены к входам соответственно первого и второго силовых блоков, выходы которых соединены соответственно с первым и вторым электродвигателями.
| US 7079944 B2, 18.07.2006 | |||
| US 2009229597 A1, 17.09.2009 | |||
| WO 2012022257 A1, 23.02.2012 | |||
| KR 20120023219 A, 13.03.2012 | |||
| CN 204462868 U, 08.07.2015 | |||
| СОЛНЕЧНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2476783C1 |
| Устройство для крепления съемных лопастей гребных винтов | 1960 |
|
SU135779A1 |

