Изобретение относится к солнечной энергетике, в частности к солнечным энергетическим устройствам, предназначенным для выработки электроэнергии путем фотоэлектрического преобразования солнечной энергии на лунной поверхности. Для получения максимальной эффективности такого преобразования необходимо обеспечить постоянную ориентацию солнечной батареи на Солнце. Кроме того, при размещении фотоэлектрогенератора на Луне необходимо обеспечить возможность перемещения по лунной поверхности с целью проведения исследования различных участков поверхности Луны. При этом для упрощения устройства и увеличения его надежности желательно использовать для перемещения тот же механизм, что и для ориентации солнечной батареи.
Известна солнечная батарея (см. RU 2230396, МПК H01L 31/042, опубл. 10.06.2004), состоящая из плоских панелей в виде каркаса и натянутого на него сетеполотна, разделенного на ячейки, в которых размещены модули. Модули содержат фотоэлектрические преобразователи, коммутационные металлические шины, защитные стеклянные пластины, подложку, элементы крепления модуля к сетеполотну и байпасные диоды. Стеклянные пластины покрывают несколько фотоэлектрических преобразователей и образуют цельные блоки. Элементы крепления, байпасные диоды и шины, вблизи краев модуля установлены на наружной поверхности стеклянных пластин на тыльной стороне модуля. Элементы крепления выполнены в виде площадки со стержнем, при этом площадка соединена со стеклянной пластиной, а конец стержня пропущен через сетеполотно и загнут на нить сетеполотна.
Известная солнечная батарея имеет низкий удельный энергосъем вследствие отсутствия ориентации на Солнце и не может быть размещена на Луне из-за отсутствия механизма перемещения.
Известно фотоэлектрогенерирующее устройство (см. US 20110017875, МПК B64G 1/44, HOIL 31/042, опубл. 27.01.2011), содержащее несущую конструкцию космического аппарата, на которой закреплена панель концентраторных фотоэлектрических элементов, включающая в себя множество линз Френеля, направляющих свет на панель фотоэлектрических преобразователей, термически подключенных к центральной несущей конструкции через радиатор тепловой трубы. Тепловая труба обеспечивает передачу генерируемого тепла от панели фотоэлектрических преобразователей и рассеяние его на радиаторе тепловой трубы и элементах несущей конструкции.
Недостатком известного фотоэлектрогенерирующего устройства является низкий удельный энергосъем. Кроме того, известное солнечное фотоэлектрогенерирующее устройство имеет сложную конструкцию и ее применение на лунных станциях в условиях большого перепада температур затруднительно.
Известна солнечная фотоэлектрическая установка (см. RU2286517 МПК F24J 2/42, опубл. 27.10.2006), включающая солнечную батарею, набранную из концентраторных фотоэлектрических модулей, содержащих фотоэлектрические преобразователи, находящиеся в фокусах линз Френеля, размещенную на механической системе ориентации на Солнце, содержащей приводы зенитального и азимутального вращения, снабженные шаговыми мотор-редукторами, систему слежения, оснащенную датчиками положения Солнца. Механическая система включает две рамы - базовую, вращающуюся вокруг вертикальной оси, и подвешенную, с закрепленными концентраторными фотоэлектрическими модулями, обеспечивающую поворот вокруг горизонтальной оси.
Известная солнечная фотоэлектрическая установка имеет недостаточную общую энергоэффективность вследствие большой площади нефотоактивной области фотоэлектрической установки и недостаточно эффективную систему отвода тепла, что обеспечивает работу концентраторных фотоэлектрических модулей только в наземных условиях.
Известна солнечная фотоэнергоустановка (см. патент US 7381886, МПК H01L 31/0232, опубликован 03.06.2008). Солнечная фотоэнергоустановка содержит вертикальную полую цилиндрическую опору, вал с первым приводом, коаксиально установленный с возможностью вращения в полости цилиндрической опоры. На верхнем торце вала установлена посредством цилиндрического шарнира, ось которого ортогональна оси вала, рама со вторым приводом и с оптическим солнечным датчиком, чувствительным к смещению Солнца. На раме закреплена солнечная батарея с концентраторами солнечного излучения, в фокусе которых установлены на теплоотводящем основании фотоэлектрические преобразователи. Солнечная батарея, установленная на раме, содержит массив концентрирующих излучение линз Френеля и многокаскадные полупроводниковые солнечные элементы на основе полупроводниковых соединений А3В5.
Известная наземная солнечная фотоэнергоустановка не имеет функции перемещения по подстилающей поверхности, что ограничивает ее функциональные возможности в условиях работы на поверхности Луны.
Известна фотоэлектрогенерирующая установка лунного базирования (см. RU 2767718, МПК H01L3 1/042, опубл. 18.03.2022), содержащая вертикальную полую цилиндрическую опору, вал с первым приводом, коаксиально установленный с возможностью вращения в полости цилиндрической опоры, раму со вторым приводом и с оптическим солнечным датчиком, чувствительным к смещению Солнца, установленную на верхнем торце вала посредством цилиндрического шарнира, ось которого ортогональна оси вала, и закрепленную на раме солнечную батарею с концентраторами солнечного излучения, в фокусе которых установлены на теплоотводящем основании фотоэлектрические преобразователи. В данной фотоэнергоустановке вал выполнен из материала с повышенной теплопроводностью, вертикальная полая цилиндрическая опора выполнена составной с возможностью частичного погружения в грунт места установки, нижний участок цилиндрической опоры выполнен из материала с повышенной теплопроводностью, а верхний участок цилиндрической опоры выполнен из теплоизолирующего материала, во внутренней поверхности цилиндрической опоры выполнена кольцевая цилиндрическая проточка, а наружная поверхность участка вала, выступающего из верхнего торца цилиндрической опоры, и наружная поверхность участка цилиндрической опоры, не погружаемого в лунный грунт, выполнены светоотражающими.
Недостатком известной фотоэлектрогенерирующей установки является сложность ее монтажа и невозможность осуществления перемещения установки по поверхности Луны.
Известен солнечный фотоэлектрогенератор (см. ES 1166312 МПК H01L 31/00, F24J 2/00, B62D 59/02, опубл. 03.10.2016), совпадающий с настоящим техническим решением по наибольшему числу существенных признаков и принятый за прототип. Известный фотоэлектрогенератор содержит солнечную батарею, колесное транспортное средство, на верхней части платформы которого установлена солнечная батарея таким образом, чтобы образовать верхнюю крышку, устройство развертывания солнечной батареи из исходного компактного транспортного положения, инвертор-преобразователь постоянного тока в переменный устройство накопления солнечной энергии, обеспечивающие автономную работу, фотоэлектрический солнечный регулятор, управляющий зарядом и разрядом аккумуляторов.
Недостатками известного солнечного фотоэлектрогенератора являются его низкая энергоэффективность и невозможность его дистанционного управления.
Задачей настоящего технического решения является разработка солнечного фотоэлектрогенератора, который бы обеспечивал высокую эффективность преобразования солнечного излучения в течение лунного дня и перемещение фотоэлектрогенератора по поверхности Луны в дистанционном режиме управления.
Поставленная задача решается тем, что солнечный фотоэлектрогенератор содержит солнечную батарею, установленную на верхней части платформы колесного транспортного средства, обеспечивающего перемещение солнечного фотоэлектрогенератора по поверхности Луны, и устройство развертывания солнечной батареи из исходного компактного транспортного положения. Новым в солнечном фотоэлектрогенераторе является то, что два соосных колеса транспортного средства выполнены ведущими с помощью установленных на них независимых электроприводов; солнечная батарея с датчиком положения Солнца выполнена в виде части цилиндрической поверхности, обращенной вогнутой поверхностью к колесному транспортному средству, с длинными сторонами, параллельными оси образующего цилиндрическую поверхность цилиндра и установленными в плоскостях, перпендикулярных общей оси ведущих колес; при этом расстояние d между длинными сторонами солнечной батареи равно (0,90-0,95)⋅L, где L - ширина выпуклой поверхности солнечной батареи, края одной короткой стороны солнечной батареи с помощью двух цилиндрических шарниров соединены штангой, параллельной общей оси ведущих колес и прикрепленной к краю платформы транспортного средства; устройство развертывания солнечной батареи из исходного компактного транспортного положения выполнено в виде пружинного механизма, установленного между платформой транспортного средства и штангой, обеспечивающего раскрытие солнечной батареи после посадки на Луну, и фиксатора угла раскрытия солнечной батареи, равного селенографической широте расчетного места посадки фотоэлектрогенератора на Луну; внутри платформы транспортного средства установлено радиоприемное устройство для удаленного управления фотоэлектрогенератором, включающее канал радиоприемного тракта, адресно-командный дешифратор, микропроцессорный блок управления, постоянное запоминающее устройство, датчики положения электроприводов первого и второго ведущих колес, электроприводы первого и второго ведущих колес, датчик положения Солнца и устройство развертывания солнечной батареи, при этом вход-выход канала радиоприемного тракта соединен с первым входом-выходом адресно-командного дешифратора, второй вход-выход которого соединен с первым входом-выходом микропроцессорного блока управления, к первому входу которого подключен датчик положения Солнца, второй и третий входы микропроцессорного блока управления соединены соответственно с датчиком положения электропривода первого колеса и датчиком положения электропривода второго колеса, первый выход микропроцессорного блока управления подключен к устройству развертывания солнечной батареи, второй и третий выходы микропроцессорного блока управления соединены соответственно с электроприводом первого колеса и электроприводом второго колеса, а второй вход-выход микропроцессорного блока управления соединен с постоянным запоминающим устройством.
В солнечном фотоэлектрогенераторе в качестве датчика положения Солнца может быть использована солнечная батарея.
В солнечном фотоэлектрогенераторе солнечная батарея может быть выполнена на основе каскадных солнечных элементов или на основе фотоэлектрических модулей с концентраторами солнечного излучения.
Техническим результатом, достигаемым приведенной выше совокупностью признаков, является обеспечение высокой энергоэффективности фотоэлектрогенератора за счет ориентации солнечной батареи на Солнце и обеспечение ее перемещения по лунной поверхности с использованием тех же электроприводов, которые используются для ориентации солнечной батареи.
Настоящее изобретение поясняется чертежами, где:
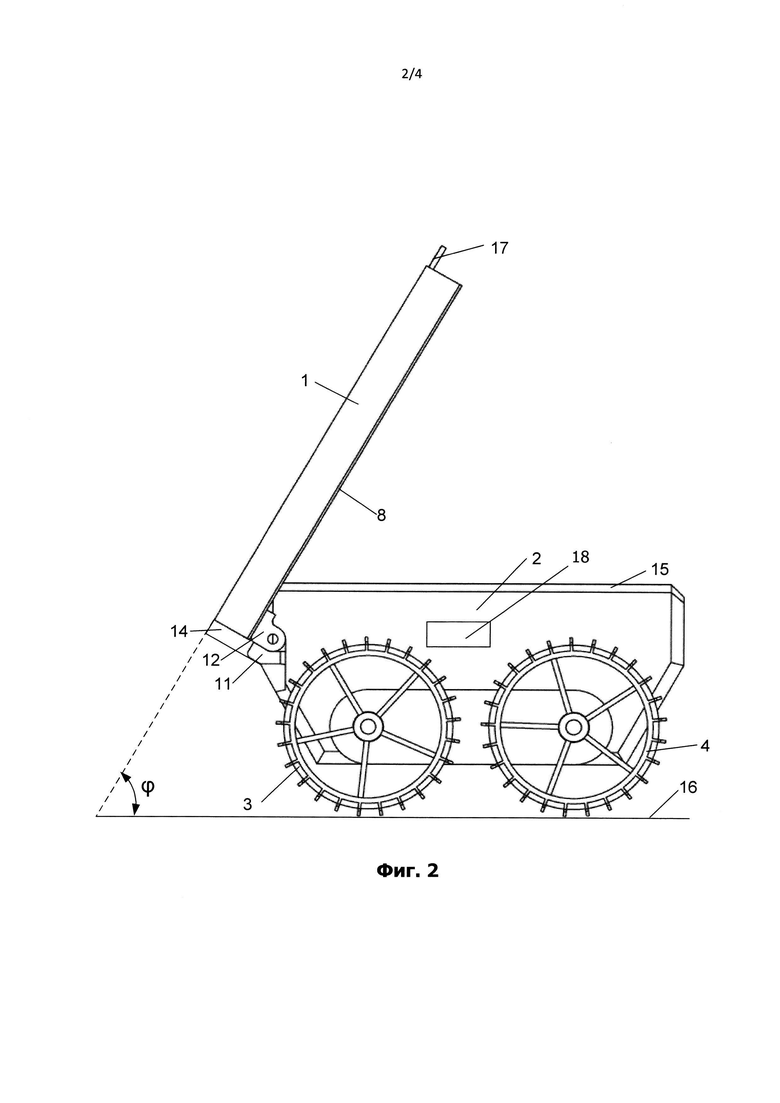
на фиг. 1 показан в аксонометрии солнечный фотоэлектрогенератор;
на фиг. 2 приведен вид фотоэлектрогенератора сбоку;
на фиг. 3 приведена блок-схема радиоприемного устройства для удаленного управления фотоэлектрогенератором и маршрутом его движения;
на фиг. 4 показан макет фотоэлектрогенератора в раскрытом состоянии.
Солнечный фотоэлектрогенератор (фиг. 1 - фиг. 3) содержит колесное транспортное средство 1 с несущей платформой, на верхней части которой размещена солнечная батарея 2, что обеспечивает упрощенное развертывание солнечной 6атареи 2 и перемещение фотоэлектрогенератора по поверхности Луны. Транспортное средство 1 выполнено не менее чем с четырьмя колесами 3, 4, 5, 6, что обеспечивает равномерность и плавность движения фотоэлектрогенератора по лунной поверхности. Выполнение двух колес 3, 5 соосными и ведущими с помощью размещенных на них электроприводов обеспечивает равномерность и плавность движения фотоэлектрогенератора по лунной поверхности. Выполнение же электроприводов двух колес 3, 5 отдельными (независимыми) обеспечивает возможность при необходимости изменения направления движения солнечного фотоэлектрогенератора, а также возможность отслеживания азимутального положения Солнца. Солнечная батарея 2 выполнена в виде части цилиндрической поверхности с длинными сторонами 7, 8 параллельными оси образующего цилиндра. Выпуклая форма солнечной батареи 2 обеспечивает увеличение жесткости каркаса солнечной батареи 2 по сравнению с плоской батареей и, как следствие этого, снижение веса батареи 2, что чрезвычайно важно для любого космического аппарата, особенно для аппаратов, запускаемых на планеты, в том числе на Луну. Выполнение длинных сторон 7, 8 солнечной батареи 2 параллельными оси образующего цилиндра обеспечивает наибольшую компактность устройства в упакованном, транспортном состоянии, что является также важным наряду с требованием минимального веса устройства. Расположение длинных 7, 8 сторон солнечной батареи 2 в плоскостях, перпендикулярных оси ведущих колес 3, 5 также обеспечивает наилучшую компактность устройства в упакованном состоянии. При расстоянии d между длинными сторонами 7, 8 солнечной батареи 2 равном (0,90-0,95)⋅L обеспечивается оптимальный прогиб солнечной батареи 2. При меньшем прогибе (d>95L) существенно уменьшается жесткость каркаса солнечной батареи 2, а при большем прогибе уменьшается КПД солнечной батареи 2 из-за уменьшения мощности перехватываемого солнечной батареей 2 солнечного излучения. Соединение края короткой стороны 9 солнечной батареи 2 штангой 11, параллельной общей оси ведущих колес 3, 5 и прикрепленной к краю платформы транспортного средства 1, обеспечивает фиксацию солнечной батареи 2 относительно транспортного средства 1 и плоскости лунного горизонта в месте локализации фотоэлектрогенератора на Луне. Соединение штанги 11 с солнечной батареей 2 с помощью двух цилиндрических шарниров 12, 13 обеспечивает раскрытие солнечной батареи 2 после посадки на Луну. После посадки на Луну солнечная батарея поворотом в упомянутых шарнирах 12, 13 устанавливается в раскрытом состоянии с помощью устройства 14 развертывания солнечных панелей в виде пружинного механизма, установленного между платформой и штангой, обеспечивающего раскрытие солнечной батареи после посадки на Луну, и фиксатора угла раскрытия солнечной батареи под углом ϕ к плоскости лунного горизонта 16, равным селенографической широте места локализации фотоэлектрогенератора. В закрытом транспортном состоянии солнечная батарея 2 установлена прилегающей своей вогнутой поверхностью к выпуклой поверхности 15 транспортного средства 1, что обеспечивает максимальную компактность солнечного фотоэлектрогенератора в транспортном состоянии. В раскрытом состоянии наклон солнечной батареи 2 обеспечивает незначительную девиацию ориентации солнечной батареи 2 на Солнце в зенитальном угле в диапазоне ± 1.5 углового градуса. Этот диапазон соответствует среднему наклонению плоскости лунного экватора к плоскости эклиптики равному 1,543 углового градуса. При этом смещение солнечного диска по азимуту компенсируется с помощью датчика 17 положения Солнца и постоянного доворота фотоэлектрогенератора вместе с солнечной батареей 2 со скоростью равной 360 угловых градусов за один лунный сидерический месяц. Этот доворот фотоэлектрогенератора осуществляется с помощью колес 3, 5 и электроприводов, установленных на общей оси соосных ведущих колес 3, 5. В качестве датчика положения Солнца на лунном небосводе может быть использовано отдельное устройство 17, а также сама солнечная батарея 2. Внутри платформы транспортного средства 1 установлено радиоприемное устройство 18 для удаленного управления фотоэлектрогенератором и маршрутом его движения. Радиоприемное устройство 18 включает канал радиоприемного тракта (КРТ) 19, адресно-командный дешифратор (АКД) 20, микропроцессорный блок управления (МБУ) 21, постоянное запоминающее устройство (ПЗУ) 22, датчики положения электроприводов (ДПЭ1) 23, (ДПЭ2) 24 соответственно первого и второго ведущих колес 3, 5, электроприводы (ЭП1) 25, (ЭП2) 26 соответственно первого и второго ведущих колес 3, 5, датчик положения Солнца (ДПС) 17 и устройство развертывания солнечной батареи (УРСБ) 14. При этом вход-выход КРТ 19 соединен с первым входом-выходом АКД 20. Второй вход-выход АКД 20 подключен к первому входу-выходу МБУ 21. К первому входу МБУ 21 подключен ДПС 17. Второй и третий входы МБУ 21 соединены соответственно с ДПЭ1 23 первого колеса 3 и ДПЭ2 24 второго колеса 5. Первый выход МБУ 21 подключен к УРСБ 14, второй и третий и выходы МБУ 21 соединены соответственно с ЭП1 25 первого колеса 3 и ЭП2 26 второго колеса 5. Второй вход-выход МБУ 21 соединен с постоянным запоминающим устройством 22.
Солнечная батарея 2 может быть выполнена на основе каскадных солнечных элементов, обеспечивающих максимальный КПД > 30% в условиях околоземного космического пространства, в том числе, на Луне. Солнечная батарея 2 может быть выполнена также на основе фотоэлектрических модулей с концентраторами солнечного излучения, обеспечивающих КПД > 30% и снижение площади, а, следовательно, и стоимости солнечных элементов пропорционально кратности концентрирования солнечного излучения, установленной в оптимальном диапазоне 50-100 крат.
Работает настоящий фотоэлектрогенератор следующим образом.
В упакованном (транспортном) положении выпуклая солнечная батарея 2 установлена вогнутой стороной, прилегающей к выпуклой поверхности 15 транспортного средства 1. При этом форма солнечной батареи 2 является негативной по отношению к форме поверхности 15 транспортного средства 1. Это условие обеспечивает компактность и наилучшую сохранность солнечной батареи 2 при запуске аппарата в космос и при посадке на Луну. Движение фотоэлектрогенератора и выбор режима работы обеспечивается дистанционно с Земли. КРТ 19 предназначен для получения команд с Земли и передачи информации с устройств фотоэлектрогенератора. АКД 20 обеспечивает анализ поступающих команд и передачу их на МБУ 21, что позволяет использовать один радиоприемный канал для управления несколькими фотоэлектрогенераторами. Для хранения данных о текущем состоянии (положение, направление, режим работы, отрабатываемая команда) предназначена ПЗУ 22. МБУ 21 предназначен для анализа приходящих команд и текущего состояния из ПЗУ 22 и с ДПЭ1 23, ДПЭ2 24 ведущих колес 3, 5. МБУ 21 по заложенному в него алгоритму, при необходимости, обеспечивает изменение текущего режима работы (ожидание, движение к заданной точке, слежение за Солнцем), управление исполнительными устройствами УРСБ 14, электроприводов первого и второго колес (ЭП1 25 и ЭП2 26) и слежения за Солнцем с помощью ДПС 17). После посадки солнечная батарея 2 с помощью устройства 14 развертывания солнечной батареи 2 в виде пружинного механизма и фиксатора угла раскрытия солнечной батареи 2 устанавливается по углом ϕ к лунному горизонту 16, равному селенографической широте места размещения фотоэлектрогенератора. В результате этого длинные стороны 7, 8 батареи 2 устанавливаются параллельно оси вращения Луны перпендикулярно к плоскости лунного экватора, наклоненной к плоскости эклиптики под углом 1,543 углового градуса. При этом оси ведущих колес 3, 5 с помощью установленных на каждом из колес 3, 5 отдельных электроприводов и датчика 17 азимутального положения Солнца ориентируются перпендикулярно направлению на Солнце, а затем осуществляется вращение фотоэлектрогенератора со скоростью равной 360 угловых градусов за один лунный сидерический месяц в направлении, противоположном направлению вращения Луны вокруг собственной оси. Таким образом, девиация положения солнечной батареи 2 в зенитальном направлении в течение лунного сидерического месяца составляет всего ± 1,5 угловых градуса, что практически не будет приводить к снижению энерговыработки при обеспечении ориентации солнечной батареи 2 по азимуту с помощью электроприводов на осях ведущих колес 3, 5, обеспечивающих вращение фотоэлектрогенератора со скоростью 360 угловых градуса за один сидерический месяц.
Работоспособность настоящего фотоэлектрогенератора была проверена на изготовленном макете (фиг. 4) с размером солнечной батареи 65 см х 50 см, установленной на территории ФТИ им. А.Ф. Иоффе в г. Санкт-Петербурге. Вследствие наклона плоскости экватора Земли к эклиптике, равном 23 угловых градуса, девиация зенитального положения солнечной батареи на Земле составляет 23 угловых градусов за 3 месяца, что соответствует 1 угловому градусу за 4 дня. Скорость вращения солнечной батареи для компенсации азимутального смещения Солнца в течение дня (180 угловых градусов за 12 часов) была установлена равной 15 угловых градусов за один час. При этом датчик положения Солнца показал величину разориентации солнечной батареи относительно положения Солнца не более ± 0,2 углового градуса в течение светового дня. Таким образом, проведенные испытания фотоэлектрогенератора подтвердили работоспособность устройства в условиях натурных испытаний на Земле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ ЭНЕРГОУСТАНОВКА | 2022 |
|
RU2789205C1 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ И СПОСОБ ЕЕ ОРИЕНТАЦИИ | 2021 |
|
RU2764866C1 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРОСТАНЦИЯ | 2022 |
|
RU2789285C1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 2001 |
|
RU2200115C2 |
| УСТАНОВКА ДЛЯ ОРИЕНТАЦИИ ФОТОЭЛЕКТРИЧЕСКОЙ БАТАРЕИ НА СОЛНЦЕ | 2008 |
|
RU2377474C1 |
| СОЛНЕЧНАЯ УСТАНОВКА | 2014 |
|
RU2570483C1 |
| Солнечная батарея космического аппарата | 2015 |
|
RU2632677C2 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ВОДЫ НА ЛУНЕ | 2021 |
|
RU2770385C1 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2286517C1 |
| СОЛНЕЧНАЯ КОНЦЕНТРАТОРНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2476956C1 |



Солнечный фотоэлектрогенератор содержит солнечную батарею (2), установленную на верхней части платформы колесного транспортного средства (1), и устройство развертывания солнечной батареи из исходного компактного транспортного положения. Два соосных колеса (3, 5) транспортного средств (1) выполнены ведущими с помощью установленных на них независимых электроприводов, солнечная батарея (2) с датчиком (17) положения Солнца выполнена в виде части цилиндрической поверхности, обращенной вогнутой поверхностью к колесному транспортному средству (1), с длинными сторонами (7, 8), параллельными оси образующего цилиндрическую поверхность цилиндра и установленными в плоскостях, перпендикулярных общей оси ведущих колес (3, 5). Расстояние d между длинными сторонами (7, 8) солнечной батареи (2) равно (0,90-0,95)⋅L, где L - ширина выпуклой поверхности солнечной батареи (2). Края одной короткой стороны (9) солнечной батареи (2) с помощью двух цилиндрических шарниров (12, 13) соединены штангой (11), параллельной общей оси ведущих колес (3, 5) и прикрепленной к краю платформы транспортного средства (1). Устройство (14) развертывания солнечной батареи из исходного компактного транспортного положения выполнено в виде пружинного механизма, установленного между платформой транспортного средства (1) и штангой (11) и фиксатора угла раскрытия солнечной батареи (2), равного селенографической широте расчетного места посадки фотоэлектрогенератора на Луну. Внутри платформы транспортного средства (1) установлено радиоприемное устройство (18) для удаленного управления фотоэлектрогенератором и маршрутом его движения. Солнечный фотоэлектрогенератор, выполненный согласно изобретению, обеспечивает высокую эффективность преобразования солнечного излучения в течение лунного дня и перемещение фотоэлектрогенератора по поверхности Луны в дистанционном режиме управления. 3 з.п. ф-лы, 4 ил.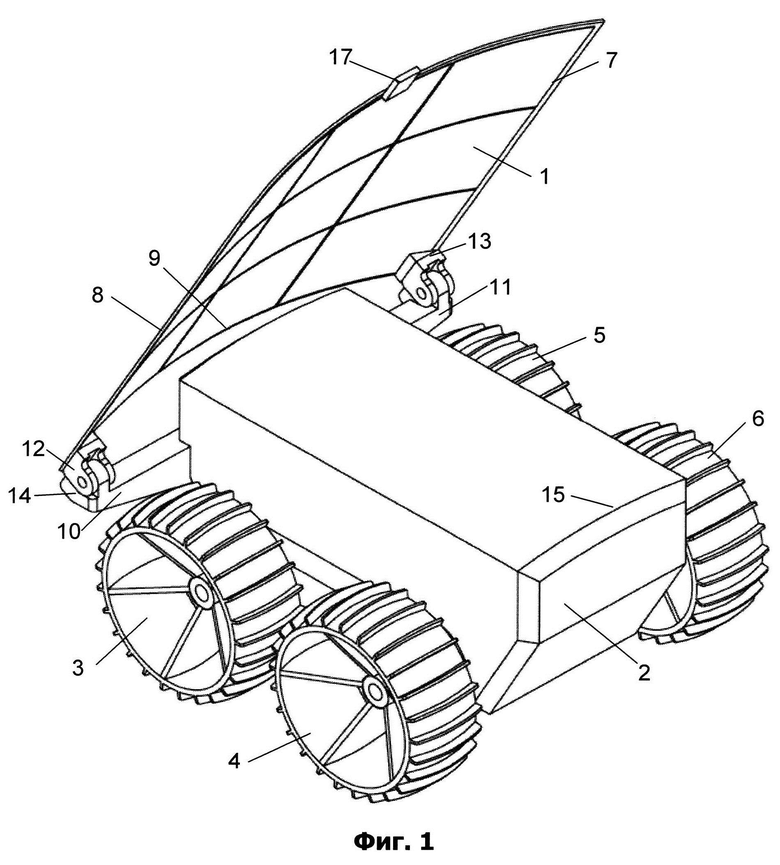
1. Солнечный фотоэлектрогенератор, содержащий солнечную батарею, установленную на верхней части платформы колесного транспортного средства, обеспечивающего перемещение солнечного фотоэлектрогенератора по поверхности Луны, и устройство развертывания солнечной батареи из исходного компактного транспортного положения, отличающийся тем, что два соосных колеса транспортного средства выполнены ведущими с помощью установленных на них независимых электроприводов, солнечная батарея с датчиком положения Солнца выполнена в виде части цилиндрической поверхности, обращенной вогнутой поверхностью к колесному транспортному средству, с длинными сторонами, параллельными оси образующего цилиндрическую поверхность цилиндра и установленными в плоскостях, перпендикулярных общей оси ведущих колес, при этом расстояние d между длинными сторонами солнечной батареи равно (0,90-0,95)⋅L, где L - ширина выпуклой поверхности солнечной батареи, края одной короткой стороны солнечной батареи с помощью двух цилиндрических шарниров соединены штангой, параллельной общей оси ведущих колес и прикрепленной к краю платформы транспортного средства, устройство развертывания солнечной батареи из исходного компактного транспортного положения выполнено в виде пружинного механизма, установленного между платформой транспортного средства и штангой, обеспечивающего раскрытие солнечной батареи после посадки на Луну, и фиксатора угла раскрытия солнечной батареи, равного селенографической широте расчетного места посадки фотоэлектрогенератора на Луну, внутри платформы транспортного средства установлено радиоприемное устройство для удаленного управления фотоэлектрогенератором и маршрутом его движения, включающее канал радиоприемного тракта, адресно-командный дешифратор, микропроцессорный блок управления, постоянное запоминающее устройство, датчики положения электроприводов первого и второго ведущих колес, электроприводы первого и второго ведущих колес, датчик положения Солнца и устройство развертывания солнечной батареи, при этом вход-выход канала радиоприемного тракта соединен с первым входом-выходом адресно-командного дешифратора, второй вход-выход которого соединен с первым входом-выходом микропроцессорного блока управления, к первому входу которого подключен датчик положения Солнца, второй и третий входы микропроцессорного блока управления соединены соответственно с датчиком положения электропривода первого колеса и датчиком положения электропривода второго колеса, первый выход микропроцессорного блока управления подключен к устройству развертывания солнечной батареи, второй и третий выходы микропроцессорного блока управления соединены соответственно с электроприводом первого колеса и электроприводом второго колеса, а второй вход-выход микропроцессорного блока управления соединен с постоянным запоминающим устройством.
2. Фотоэлектрогенератор по п. 1, отличающийся тем, что солнечная батарея одновременно является датчиком положения Солнца.
3. Фотоэлектрогенератор по п. 1, отличающийся тем, что солнечная батарея выполнена на основе каскадных солнечных элементов.
4. Фотоэлектрогенератор по п. 1, отличающийся тем, что солнечная батарея выполнена на основе фотоэлектрических модулей с концентраторами солнечного излучения.
| Устройство декодирования | 1984 |
|
SU1166312A1 |
| US 20110017875 A1, 27.01.2011 | |||
| 0 |
|
SU176098A1 | |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПОЛУФАБРИКАТОВВВОДОВ | 0 |
|
SU180696A1 |

