Изобретение относится к электроэнергетике, а именно к релейной защите и автоматике электрических систем. Локация, иначе определение места повреждения объекта, выполняется в отложенном времени, т.е. к ней не предъявляется строгое требование высокого быстродействия, как к релейной защите. С появлением микропроцессорной техники место короткого замыкания в линиях электропередачи определяют с использованием моделей контролируемых объектов [1, 2]. Первоначально имелась возможность привлечь результаты наблюдения линии лишь с одной ее стороны. Для обработки наблюдаемых электрических величин использовались специфические модели, выполняющие роль преобразователей. Токи и напряжения, наблюдаемые на одной стороне электропередачи, преобразуются такими моделями в электрические величины произвольного места линии, называемого местом предполагаемого повреждения [1-4]. В отличие от имитационной модели, активируемой источниками, по одному в каждом месте наблюдения, преобразовательные модели называют алгоритмическими [5, 6], но это название носит теоретический характер.
В связи с развитием техники связи между удаленными подстанциями появилась возможность наблюдать электрическую систему в разных местах, что привело к усовершенствованию способов определения места замыкания [7, 8]. Стало возможным определение не только одного, но и двух замыканий в разных местах системы [9], и установление характера повреждения [10]. Однако все эти технические решения реализовывались в базисе комплексных электрических величин, иначе говоря, компонентов основной частоты. Такой базис не подходит для систем, в которых короткое замыкание устраняется быстродействующими выключателями и потому наблюдается непродолжительное время, недостаточное для выделения составляющих частоты сети. Кроме того, этот базис не годится и для распределительных сетей, где однофазные замыкания приводят лишь к кратковременным, хотя и интенсивным, переходным процессам.
Известны технические решения, опирающиеся на базис мгновенных значений токов и напряжений [11-14]. Все они предполагают использование моделей линий электропередачи. Предполагается, что объект наблюдается непрерывно, поэтому имеется информация о его состоянии в нормальном режиме, предшествовавшем повреждению, и в наступившем затем аварийном режиме. Вопрос в том, как учитывается имеющаяся информация. В некоторых способах определяют аварийные составляющие электрических величин [11, 12]. В таком случае возможности определения места повреждения ограничиваются линейными моделями электрических систем. Между тем, в последние годы в электроэнергетике находят все более широкое применение нелинейные устройства - токоограничивающие и компенсирующие реакторы, варисторы, шунтирующие установки последовательной емкостной компенсации. В линейных системах источником аварийных составляющих является ток замыкания, и это положение лежит в основе алгоритмов локации. В нелинейных системах данное положение утрачивает силу.
Локация повреждений с использованием модели объекта в большинстве известных способов совершается с учетом критерия повреждения [1-10], называемого критерием резистивности. Он реализуется очевидным образом в синусоидальном режиме, так как сводится к утверждению, что в месте повреждения не потребляется реактивная мощность. Однако в базисе мгновенных значений его реализация затруднена необходимостью определять мгновенную мощность повреждения и проводить непрерывное отслеживание ее полярности [13].
Известен способ [14], отчасти свободный от перечисленных недостатков, так как в нем не используется критерий резистивности и нет условия выделения аварийных составляющих наблюдаемых величин. Однако и он в свою очередь связан с целым рядом ограничений. Во-первых, предусматривает выделение информационных составляющих наблюдаемых величин, например составляющих нулевой последовательности. Действительно, источник нулевой последовательности располагается в месте повреждения, но только при условии, что система линейная и, следовательно, обладает свойством суперпозиции. Во-вторых, этот способ накладывает ограничения на используемые модели, оговаривая, что они должны быть двухпроводными двухвходовыми. Для симметричных фидеров без нелинейных элементов такое условие приемлемо, но в общем случае от него необходимо отказаться.
В настоящем предложении ставится цель расширения функциональных возможностей способа определения места замыкания в электрической системе с тем, чтобы использование ее моделей снимало какие бы то ни было ограничения, в частности, по числу проводов, наличию нелинейных элементов, числу наблюдаемых мест объекта.
Поставленная цель достигается благодаря тому, что существенные технические признаки прототипа дополнены новыми признаками, которые позволили снять имевшиеся ограничения. Прототип предназначается для частного объекта - фидера распределительной сети. Предлагаемый способ имеет в виду произвольную систему. Тем не менее, их объединяет ряд общих признаков. Они используют модели двух типов - преобразовательные и имитационные. Преобразовательная модель представляет собой блок передачи сигналов со входов на выход.
Места наблюдения - это входы системы. Наблюдение проводят в дискретном времени, синхронно на всех входах. Наблюдают и фиксируют отсчеты напряжений и токов, но для работы с моделями требуются непрерывные величины, поэтому отсчеты преобразуют в непрерывные напряжения и токи. К новым признакам предлагаемого способа относятся операции, связанные с моделированием электрической системы в режиме короткого замыкания и с дальнейшим использованием модели для определения места замыкания. Электрическую систему разделяют на две части, получают две подсистемы, которые моделируют по-разному. Принципиально, что подсистемы соприкасаются в месте предполагаемого замыкания, и все выполняемые затем операции имеют целью проверку сделанного предположения. Если оно будет опровергнуто, то последует очередное предположение о месте замыкания, далее его проверка, и т.д. Для первой подсистемы составляют преобразовательную модель, а для второй имитационную. Составляют таким образом, чтобы входы преобразовательной модели соответствовали входам первой подсистемы, а выход - месту предполагаемого замыкания. В отличие от преобразовательной, имитационная модель имеет только входы. В данном способе ее входы подразделяют на основные и дополнительные. Основные соответствуют входам второй подсистемы. На них воздействуют наблюдаемыми величинами и с них снимают реакцию модели. Дополнительные входы соответствуют, как и выход преобразовательной модели, все тому же месту предполагаемого замыкания. Получается, что преобразовательная модель своим выходным сигналом воздействует на имитационную. В этом заключается центральная идея предлагаемого способа. Непрерывные напряжения и токи входов первой подсистемы пропускают как входные сигналы через преобразовательную модель. С выхода модели снимают результат обработки входных сигналов. Таким образом формируют напряжения места предполагаемого замыкания. Дальнейшие операции производят с имитационной моделью, которую активируют путем воздействия на все входы - основные и дополнительные. На основные входы воздействуют непрерывными напряжениями входов второй подсистемы, а на дополнительный вход имитационной модели воздействуют сформированными напряжениями места предполагаемого замыкания. Имитационная модель откликается на воздействия входными токами. Фиксируют только токи основных входов. Определяют разностные токи - разности между непрерывными токами входов второй подсистемы и токами основных входов имитационной модели. О соответствии реальности сделанному предположению судят по уровню разностных токов. Констатируют замыкание в том месте системы, которому отвечает нулевой уровень.
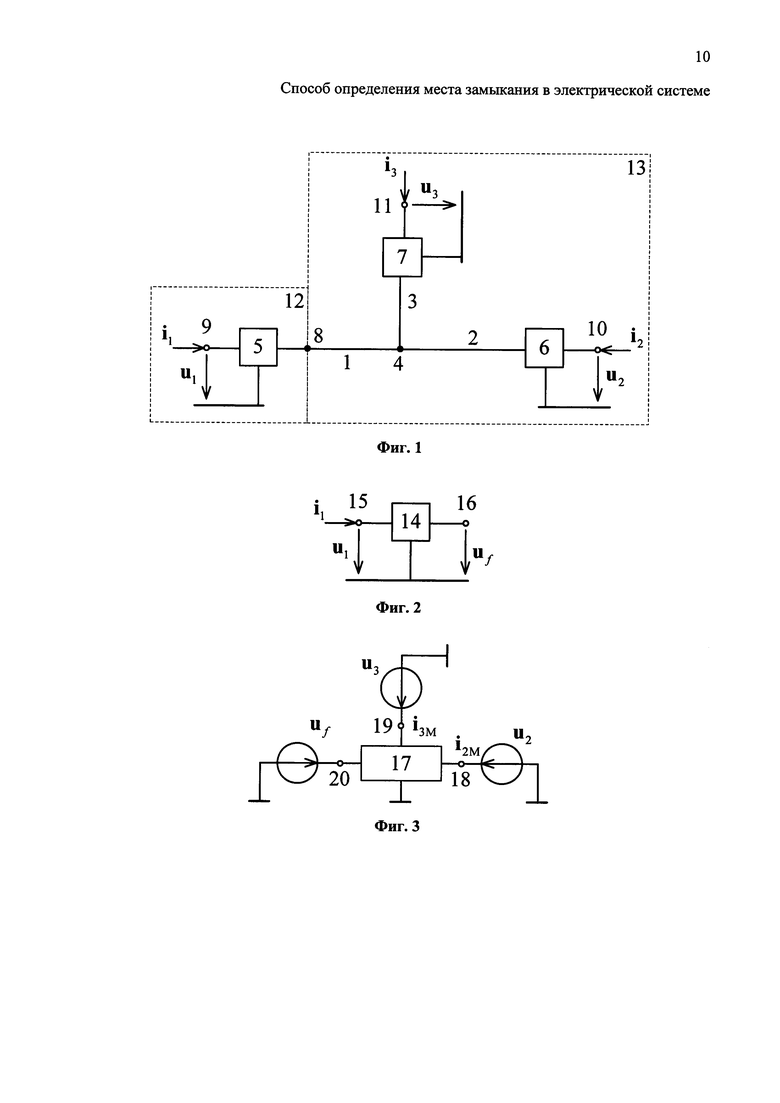
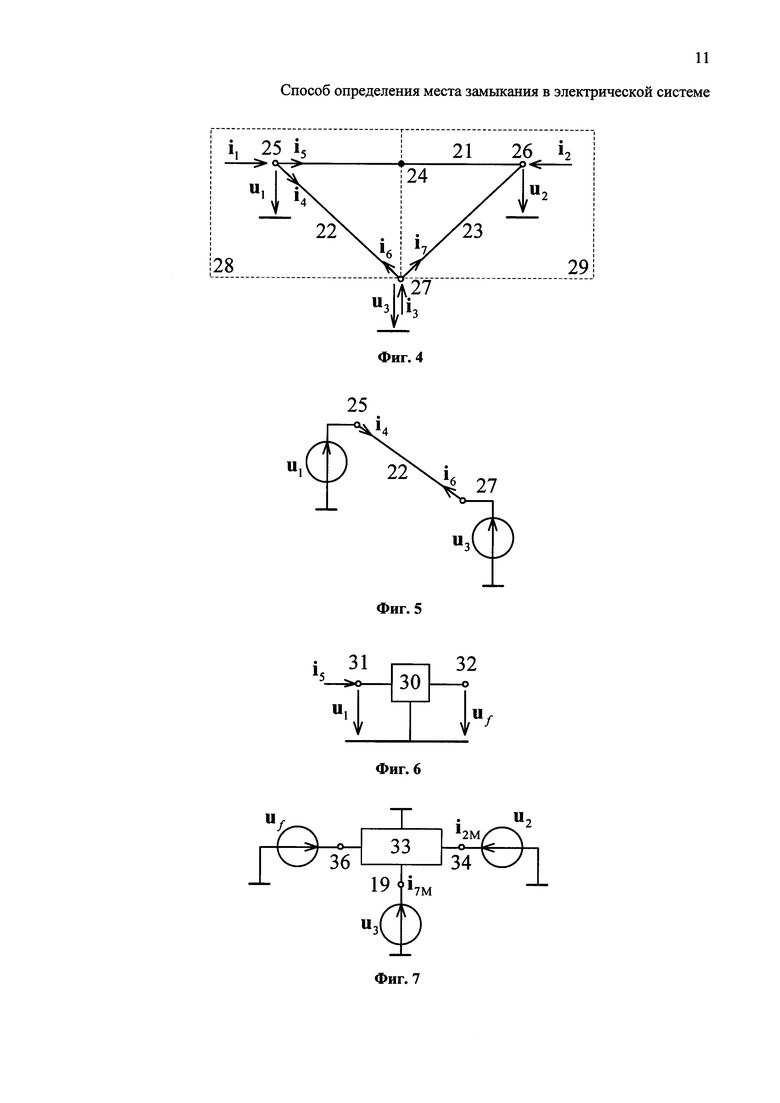
На фиг. 1 в качестве примера электрической системы приведена радиальная трехконцевая сеть, наблюдаемая со всех сторон, на фиг. 2 и 3 - преобразовательная и имитационная модели двух ее подсистем.
На фиг. 4 приведен второй пример электрической системы - кольцевая сеть, также наблюдаемая во всех узловых подстанциях. На фиг. 5 показана одна из линий в составе системы. На фиг. 6 и 7 - преобразовательная и имитационная модели первой и второй подсистемы.
Электрическая система по фиг. 1 состоит из трех линий электропередачи 1-3, соединенных в узле 4. Система содержит нелинейные устройства 5-7, исключающие возможность применения метода наложения. Предполагается замыкание в линии 1 в месте 8. На входах системы 9-11 наблюдаются напряжения и токи. Из системы выделены первая и вторая подсистемы 12 и 13, они соприкасаются в месте предполагаемого замыкания 8. Первая включает в себя вход 9, вторая - входы 10 и 11.
Для первой подсистемы 12 составлена преобразовательная модель 14 со входом 15 и выходом 16. Для второй подсистемы 13 составлена имитационная модель 17 с основными входами 18, 19 и дополнительным входом 20.
Электрическая система по фиг. 4 образована линиями электропередачи 21-23. На линии 21 в месте 24 предполагается замыкание. Система наблюдается в узлах 25-27. Токи в линиях 21-23 наблюдаются непосредственно. В противном случае они определяются в частных имитационных моделях отдельных линий. На фиг. 5 в качестве примера показана выделенная из системы линия 22 с токами, подлежащими определению.
Система разделена на первую и вторую подсистемы 28 и 29, соприкасающиеся в месте предполагаемого замыкания 24, что принципиально для данного способа. Кроме того, они соприкасаются в узле 27, что является особенностью кольцевой сети. Линии 22 и 23, отходящие от этого узла, оказываются в разных подсистемах.
Первая подсистема 28 моделируется преобразовательным блоком 30 с входом 31 и выходом 32. Имитационная модель 33 второй подсистемы 29 выполнена со входами 34-36, из которых входы 34, 35 являются основными, а вход 36 - дополнительным.
Электрическая система и ее модели даны на чертежах в однолинейном изображении, но каждая линия на чертеже соответствует многопроводной части объекта или его модели. Токи и напряжения обозначаются векторами i и u, размерность которых совпадает с числом проводов.
Входы и выходы моделей соответствуют определенным точкам электрических систем (таблица). Имитационные модели (фиг. 3, 7) активируются источниками напряжения, изображаемыми в виде ЭДС. Наблюдаемые электрические величины (фиг. 1, 4) представляют собой отсчеты u(k), i(k), где k - дискретное время. Используемые в моделях те же величины являются функциями непрерывного времени u(t), i(t). Переход от дискретных величин к непрерывным совершается в результате интерполяционного преобразования.
Предлагаемый способ реализуется следующей последовательностью выполняемых операций. На входах электрических систем наблюдают и регистрируют напряжения и токи u1, u2, u3, i1, i2, i3. Делают предположение о месте повреждения 8 или 24, относительно которого выделяют подсистемы 12, 13 или 28, 29. Для радиальной сети (фиг. 1) эта операция не нуждается в комментариях. В кольцевой сети дело обстоит сложнее. Если ток i5 в предположительно поврежденной линии 21 наблюдается непосредственно, то линия 22 не будет востребована при определении места повреждения. Если же ток i5 неизвестен, а наблюдается ток i1, то в имитационной модели линии 22 будет определен ток i4, а затем i5=i1-i4.

Преобразовательная модель первой подсистемы 14 или 30 предназначена для определения напряжения uf в месте предполагаемого замыкания 8 или 24. Источником этого напряжения затем воздействуют на соответствующий вход 20 или 36 имитационной модели 17 или 33. Кроме того, на имитационную модель воздействуют источниками непрерывных напряжений u2, u3. Реакция имитационной модели 17 - токи i2M и i3M. Реакция имитационной модели 33 - токи i2M и i7M. Ток i7 в системе не наблюдается, наблюдаемый в узле 27 ток только один, это i3. Поскольку ток i6 в любом случае известен из модели линии 22 (фиг. 5), то модельный ток i3M определяют суммированием: i3M=i6+i7M. В итоге для обеих систем разностные токи определяют для двух узлов 10, 11 или 26, 27
Δi2=i2-i2M, Δi3=i3-i3M.
Заключительная операция - контроль уровней токов Δi2 и Δi3 в сравнении с модулями векторов i2 и i3. Минимальные, близкие к нулевым, уровни имеют место при совпадении предполагаемого и истинного места замыкания.
Как видим, предлагаемый способ реализуется типовыми операциями вне зависимости от типа контролируемой электрической системы. Не предполагается привлечения сведений о свойствах произошедшего замыкания, о том, какие провода повреждены. Система может содержать нелинейные устройства. Что же касается моделирования системы по частям, востребованным в данном способе, то данная задача решена как в теоретическом, так и в практическом плане [15, 16].
Источники информации
1. Патент РФ №2033622, кл. G01R 31/11, Н02Н 3/28, 1989.
2. Патент РФ №2033623, кл. G01R 31/11, Н02Н 3/28, 1989.
3. Патент РФ №2088012, кл. Н02Н 3/40, G01R 31/08, 1994.
4. Патент РФ №2085959, кл. G01R 31/11, 1994.
5. Лямец Ю.Я, Ильин В.А., Подшивалин Н.В. Программный комплекс анализа аварийных процессов и определения места повреждения линии электропередачи. - Электричество, 1996, №12, с. 2-7.
6. Лямец Ю.Я., Нудельман Г.С., Павлов А.О. и др. Распознаваемость повреждений электропередачи, Ч. 1, 2, 3. - Электричество, 2001, №2, с. 16-23; №3, с. 16-24; №12, с. 9-22.
7. Патент РФ №2492493, кл. G01R 31/08, 2011.
8. Патент РФ №2492565, кл. Н02Н 3/28, 2012.
9. Патент РФ №2505825, кл. G01R 31/08, 2012.
10. Патент РФ №2505826, кл. G01R 31/08, 2012.
11. Патент РФ №2542331, кл. Н02Н 3/28, G01R 31/08, 2013.
12. Патент РФ №2542337, кл. Н02Н 3/28, G01R 31/08, 2013.
13. Патент РФ №2542745, кл. Н02Н 3/40, G01R 31/08, 2013.
14. Патент РФ №2568680, кл. Н02Н 3/28, G01R 31/08, 2014.
15. Лямец Ю.Я., Белянин А.А., Воронов П.И. Алгоритмическое моделирование фидера в переходном режиме. - Известия вузов. Электромеханика, 2013, №5, с. 49-56.
16. Лямец Ю.Я., Белянин А.А. Описание линий 6-35 кВ при распознавании замыкания на землю в распределительной сети. - Электротехника, 2014, №3, с. 2-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2016 |
|
RU2639718C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ОДНОФАЗНОГО ЗАМЫКАНИЯ В ФИДЕРЕ | 2017 |
|
RU2654368C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2016 |
|
RU2638300C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2553448C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА И ХАРАКТЕРА ПОВРЕЖДЕНИЯ МНОГОПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2012 |
|
RU2505826C2 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ОТВЕТВЛЕНИЯМИ | 2016 |
|
RU2642844C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2016 |
|
RU2647485C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ТРАНСФОРМАТОРА | 2016 |
|
RU2643779C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПОВРЕЖДЁННЫХ ФАЗ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ ПРИ НЕПОЛНОФАЗНОМ ЗАМЫКАНИИ НА ЗЕМЛЮ | 2016 |
|
RU2642506C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2019 |
|
RU2720949C1 |
Использование: в области электроэнергетики. Технический результат - расширение функциональных возможностей способа. Согласно способу выделяют две подсистемы, соприкасающиеся в месте замыкания. Для первой подсистемы составляют преобразовательную модель, а для второй - имитационную. Входы преобразовательной модели соответствуют входам первой подсистемы, а выход - месту предполагаемого замыкания. Входы имитационной модели подразделены на основные, соответствующие входам второй подсистемы, и дополнительный, соответствующий месту предполагаемого замыкания. Роль преобразовательной модели заключается в формировании напряжений места предполагаемого замыкания из непрерывных напряжений и токов, полученных для входов первой подмодели. Имитационную модель активируют, воздействуя на ее основные входы непрерывными напряжениями входов второй подмодели. На дополнительный вход воздействуют выходными сигналами преобразовательной модели. Реакцию имитационной модели определяют только на основных входах. Это токи, созданные воздействиями на все входы модели. На заключительном этапе определяют разности между непрерывными токами на основных входах, полученными из наблюдаемых токов, и реакцией модели. Уровень разностных токов несет информацию о том, правильно ли сделано предположение о месте повреждения. Нулевой уровень свидетельствует о совпадении реального места с предполагаемым. 1 табл., 7 ил.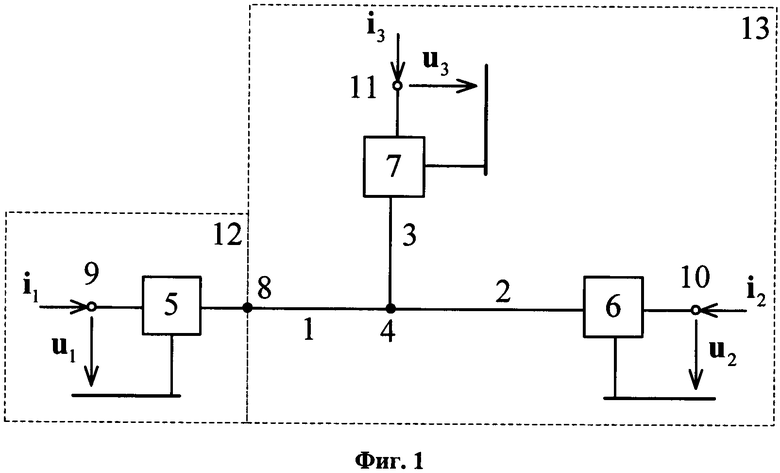
Способ определения места замыкания в электрической системе путем использования ее преобразовательных моделей, каждая из которых имеет входы, выход и предназначается для преобразования наблюдаемых электрических величин в напряжения места предполагаемого замыкания, и имитационных моделей, на входы которых воздействуют источниками напряжения и определяют их реакцию в виде входных токов, синхронного наблюдения отсчетов напряжений и токов на входах системы, интерполяционного преобразования отсчетов в непрерывные напряжения и токи, отличающийся тем, что в электрической системе выделяют первую и вторую подсистемы, соприкасающиеся в месте предполагаемого замыкания, составляют преобразовательную модель первой подсистемы и имитационную модель второй подсистемы таким образом, чтобы входы преобразовательной модели соответствовали входам первой подсистемы, основные входы имитационной модели соответствовали входам второй подсистемы, а выход преобразовательной модели и дополнительный вход имитационной модели соответствовали месту предполагаемого замыкания, формируют напряжения места предполагаемого замыкания, для чего пропускают непрерывные напряжения и токи входов первой подсистемы через преобразовательную модель, активируют имитационную модель путем воздействия на ее основные входы непрерывными напряжениями входов второй подсистемы, а на ее дополнительный вход - напряжениями места предполагаемого замыкания, фиксируют токи основных входов имитационной модели, определяют разностные токи как разности между непрерывными токами входов второй подсистемы и токами основных входов имитационной модели, контролируют уровень разностных токов и констатируют замыкание в том месте электрической системы, которому отвечает нулевой уровень разностных токов.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ЗАМЫКАНИЯ ФИДЕРА ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2014 |
|
RU2568680C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ЗАМЫКАНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2013 |
|
RU2542337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОНЫ И МЕСТА ЗАМЫКАНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 1992 |
|
RU2073876C1 |
| Способ определения расстояния до мест двойных замыканий на землю | 1988 |
|
SU1569753A1 |
| US 6420876 B1, 16.07.2002. | |||

