Изобретение относится к электроэнергетике, а именно к релейной защите и автоматике линий электропередачи. В задаче определения места повреждения не требуется настолько быстрое принятие решения о местоположении короткого замыкания как в задаче релейной защиты, что позволяет реализовывать алгоритмы, требующие больше вычислительных ресурсов.
Известна группа способов определения места повреждения (ОМП) линии электропередачи (ЛЭП) с использованием ее модели [1-7]. Основными техническими признаками, характеризующими данные решения, являются: фиксация отсчетов токов и напряжений, наблюдаемых на одной стороне линии в двух сменяющих друг друга режимах - предшествующем повреждению и текущем аварийном режиме, преобразование отсчетов в комплексные сигналы (комплексы), применение моделей линии электропередачи для перерасчета токов и напряжений в место предполагаемого повреждения.
Первым и наиболее очевидным недостатком этих способов является недостаточная функциональность, поскольку для преобразований, осуществляемых применяемыми моделями линий, необходим весь набор измеряемых величин: три фазных тока и три фазных напряжения режима. Утрата, например, одного из фазных токов или напряжений вследствие насыщения или выхода из строя трансформатора тока (ТТ) или трансформатора напряжения (ТН) не позволит произвести перерасчет токов и напряжений в место предполагаемого повреждения.
Вторым недостатком способов является то, что каждый из них выдает только одну координату места повреждения. Не принимается во внимание столь важный факт, что может существовать целое множество режимов с различными координатами места повреждения, в которых наблюдаются одинаковые комплексные значения измеряемых параметров (токов и напряжений), по которым расчет координаты приведет к одному и тому же значению. Данное положение иллюстрируется следующим примером: рассматривается воздушная ЛЭП (ВЛЭП) длиной 

Диапазоны возможных значений параметров электропередачи в режиме трехфазного КЗ








Если рассмотреть произвольный режим трехфазного КЗ с параметрами электропередачи, представленными в таблице 2 (столбец 2), то оказывается, что существует еще два режима трехфазного КЗ с другими значениями координаты места повреждения (таблица 2, столбцы 3,4), имеющие очень близкие по величине комплексные значения измеряемых параметров тока и напряжения. Значения измеряемых параметров исходного режима №1 и найденных режимов №2 и №3 приведены в таблице 3.
Значение объектных параметров исходного режима трехфазных КЗ
Значения измеряемых параметров тока и напряжения в режимах №1,2,3





Из таблицы 3 видно, что комплексные значения измеряемых параметров тока и напряжения для всех трех режимов практически совпадают и их разности значительно меньше уровня погрешностей измерения первичных преобразователей тока и напряжения. Следует отметить, что существует множество аналогичных режимов с таким же набором измеряемых параметров (токов и напряжений), в которых координата места повреждения находится между значениями 45.504 и 51.780 км. Это означает, что в каждом из этих режимов любой из алгоритмов [1-7] выдаст только одно значение места повреждения, несмотря на то, что заданному набору измеряемых токов и напряжений соответствует множество режимов и широкий интервал значений координаты возможных мест повреждений.
Известен способ определения места повреждения многопроводной электрической сети при двухстороннем наблюдении [8]. Отличительная черта этого способа - определение места реального повреждения по набору критериев, основным из которых является критерий резистивности: реактивная мощность повреждения равна нулю, активная - неотрицательна. Аналогично способам [1-7], очевидным недостатком способа [8] является то, что для функционирования способа необходимы все измерения по концам ЛЭП: токи и напряжения. Отсутствие одного из параметров режима вследствие выхода из строя ТТ или ТН не позволит произвести расчет критериев повреждения.
Безусловно, привлечение дополнительной информации с удаленного конца ВЛЭП приводит к большей точности поиска места повреждения по сравнению с алгоритмами локаторов без каналов связи. Однако алгоритм [8] так же выдает только одно значение расстояния до места повреждения и его точность зависит от тяжести КЗ: в режимах металлического КЗ точность выше, чем в режимах КЗ через переходное сопротивление. Отсюда второй недостаток способа [8] - отсутствие расчета интервала расстояния возможных мест повреждения в зависимости от тяжести КЗ.
Наличие такой зависимости иллюстрируется следующим примером. Для объекта по фиг. 1, имеющего диапазоны вариации объектных параметров, представленные в табл. 1, моделируется два режима КЗ: металлическое и с переходным сопротивлением 

где 


n - число элементов вектора параметров режима (в данном примере n = 4).
Объектные параметры первого исходного режима - режима металлического КЗ приведены в табл. 4 (столбец 2). Близкими будем считать режимы, для которых 

Объектные параметры первого исходного режима - режима металлического КЗ и найденных режимов с близкими векторами параметров режима
Значения измеряемых параметров в режимах №1, 2, 3 по таблице 4





Из таблицы 5 видно, что для двух обнаруженных режимов значение суммарной погрешности не превышает заявленного значения 2%. Это означает, что если погрешности измерения величин токов и напряжений с защищаемого объекта и погрешности задания параметров его модели таковы, что суммарная погрешность 
Легко показать, что для режима КЗ с
Объектные параметры первого исходного режима - режима металлического КЗ и найденных режимов с близкими векторами параметров режима
Значения измеряемых параметров в режимах №1,2,3 по таблице 6




Из таблицы 6 видно, что интервал возможных значений координаты места КЗ значительно шире для КЗ 
Таким образом, для алгоритма ОМП с двусторонним наблюдением по [8] присущ такой же недостаток, как и для алгоритмов [1-7] - не производится поиск всех возможных режимов, в которых вектор параметров тока/напряжения близок к вектору токов/напряжений, измеряемому на защищаемом объекте.
Наиболее близким способом является способ интервального определения места повреждения [9]. Основными техническими признаками способа являются: фиксация отсчетов токов и напряжений, наблюдаемых в линии в текущем и предшествующем режимах, преобразование отсчетов в комплексы токов и напряжений текущего и предшествующего режимов, использование передающей модели для преобразования комплексов наблюдаемых токов и напряжений предшествующего и текущего режимов в комплексы напряжений и токов соответствующих режимов в месте предполагаемого повреждения, преобразование комплексов напряжения и тока предшествующего и текущего режимов этого места в комплекс основного и дополнительного замеров, использование имитационной модели линии электропередачи для обучения передающей модели интервальному определению места повреждения путем воспроизведения в имитационной модели режимов повреждения линии и определения в этих режимах области отображения комплексов основного и дополнительного замеров на соответствующих плоскостях, определение для разных мест предполагаемого повреждения отображения комплексов основного и дополнительного замеров на соответствующих плоскостях, фиксация тех мест линии для которых отображения как основного замера, так и дополнительного попадают в соответствующие области, объединение указанных мест в интервал повреждения линии электропередачи.
Действительно, прототип обеспечивает расчет интервала места повреждения, гарантированно охватывающего место реального повреждения. Однако, как и для способов по [1-8], для способа по [9] необходимо наличие всех измеряемых параметров в текущем и предшествующем режимах для расчета основного и дополнительного замеров. При отсутствии одной из фазных величин тока/напряжения вследствие насыщения ТТ или выхода из строя ТТ,ТН расчет замеров будет невозможен.
Второй недостаток связан с тем, что нет никаких гарантий или критериев оценки того, действительно ли получаемый интервал является минимально возможным. Служба эксплуатации сетей нуждается в интервале, гарантирующем охват места повреждения, но такой интервал должен быть минимально возможным.
Цель изобретения заключается в расширении функциональных возможностей способа определения места повреждения линии электропередачи при одновременном повышении точности. Технический результат - нахождение обоснованно минимально возможного интервала, охватывающего реальное место повреждения. Поставленные цели достигаются тем, что локатор не использует никаких замеров в их привычном понимании: ни замеров сопротивления, ни критериев резистивности, ни передающих моделей и т.д. Вместо этого вводится принципиально новый подход - считать искомым режимом повреждения каждый моделируемый имитационной моделью режим, для которого наблюдается такой же вектор измеряемых параметров (токов и/или напряжений с одного либо двух и более концов ЛЭП), какой наблюдается с защищаемого объекта. При этом в качестве имитационной модели может выступать модель любой сложности и наблюдения объекта могут вестись как с одной стороны, так и с многих сторон, могут быть синхронизированными, а могут быть и не синхронизированными. Более того, появляется возможность производить расчет места повреждения в том случае, когда отсутствуют одна или несколько измеряемых величин тока или напряжения вследствие выхода из строя ТТ или ТН. В этом случае проверяется равенство вектора величин токов и/или напряжений неполному вектору, доступному для измерения с объекта. В качестве критерия близости вектора измеряемых величин моделируемого режима к вектору измеряемых величин с объекта можно использовать любой критерий невязки, например величину суммарной погрешности
На фиг. 1 представлена структурная схема линии электропередачи с двусторонним питанием в режиме трехфазного короткого замыкания. На фиг. 2 и 3 показано преобразование отсчетов наблюдаемых токов и напряжений в комплексные сигналы. На фиг. 4 показана структура локатора повреждения.
На фиг. 5, 6 представлены области отображения замеров 

Линия электропередачи 1 соединяет питающие подстанции 2 и 3. В случае одностороннего наблюдения наблюдаются только вектор токов 




Отсчеты наблюдаемых величин обрабатываются в фильтре ортогональных составляющих 7. Если на вход 8 фильтра поступает заданное число отсчетов 

На вход локатора повреждения приходит вектор 12 (обозначен как 
Основным модулем локатора повреждений в предлагаемом способе является имитационная модель объекта 13, производящая расчет множества режимов повреждения защищаемого объекта и режимов, предшествующих повреждению, если на объекте измеряются составляющие предшествующего режима. Параметры имитационной модели 13 относятся к априорной информации об электропередаче. Имитационная модель объекта формирует вектора величин токов и/или напряжений (обозначен как 





Процедура поиска места повреждения локатором начинается с получения вектора измеряемых параметров с объекта
Вектора измеряемых и объектных параметров всех смоделированных режимов передаются исполнительному органу 16, и среди них он отбирает те режимы, для которых выполняется условие (1) (либо любой другой критерий невязки). Множество значений координаты места повреждения 



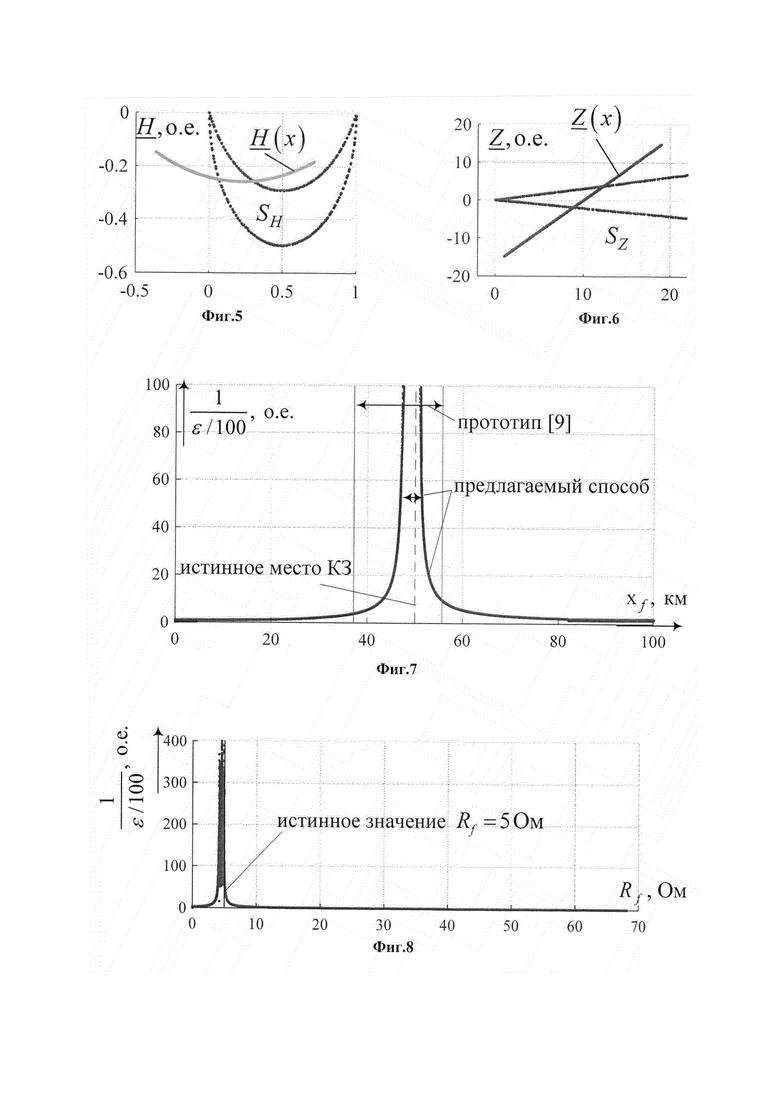
Работоспособность предлагаемого способа демонстрируется на наглядном примере. Для режима повреждения с объектными параметрами, представленными в табл. 8 для объекта по фиг. 1, но с диапазонами вариации объектных параметров, представленными в табл. 9 производится построение областей отображения замеров 





Источники информации
1. Патент РФ №2033622, МПК G01R 31/11, Н02Н 3/28, БИ 1995, №11.
2. Патент РФ №2066511, МПК Н02Н 3/40, G01R 31/08, БИ 1996, №25.
3. Патент РФ №2088012, МПК Н02Н 3/40, G01R 31/08, БИ 1997, №23.
4. Патент РФ №2085959, МПК G01R 31/11, БИ 1997, №21.
5. Патент РФ №2107304, МПК G01R 31/11, БИ 1998, №8.
6. Патент РФ №2116654, МПК G01R 31/08, БИ 1998, №21.
7. Патент РФ №2149489, МПК Н02Н 3/40, G01R 31/08, БИ 2000, №14.
8. Патент РФ №2492493, МПК G01R 31/08, БИ 2013, №25
9. Патент РФ №2639718, Н02Н 3/40, БИ 2017, №36.
Объектные параметры режима для сравнения прототипа [9] и предлагаемого способа
Диапазоны возможных значений параметров электропередачи в режиме трехфазного КЗ в примере сравнения способа прототипа [9] и заявляемого способа
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2016 |
|
RU2639718C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2016 |
|
RU2647485C1 |
| Способ определения места короткого замыкания на воздушной линии электропередачи по замерам с двух ее концов | 2022 |
|
RU2801352C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ОТВЕТВЛЕНИЯМИ | 2016 |
|
RU2642844C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ НА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПО ЗАМЕРАМ С ДВУХ ЕЕ КОНЦОВ (ВАРИАНТЫ) | 2012 |
|
RU2505827C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2014 |
|
RU2553448C1 |
| Способ определения места повреждения на воздушной линии электропередачи, оборудованной грозозащитным тросом | 2024 |
|
RU2834732C1 |
| Способ определения расстояния до мест двойных замыканий на землю на линиях электропередачи в сетях с малыми токами замыкания на землю | 2020 |
|
RU2750421C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2015 |
|
RU2622895C2 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ЭНЕРГООБЪЕКТА | 2016 |
|
RU2638300C1 |

Использование: в области электроэнергетики. Технический результат - расширение функциональных возможностей способа при одновременном повышении точности. Согласно способу интервального определения места повреждения линии электропередачи с использованием ее модели фиксируют отсчеты токов и напряжений, преобразовывают отсчеты в комплексы токов и напряжений, используют имитационную модель линии электропередачи для воспроизведения режимов повреждения линии. При этом проводят имитации повреждений при различных параметрах электропередачи и в различных точках линии электропередачи, вычисляют погрешности между измеренными на объекте и определенными в результате имитации соответствующими токами и напряжениями, задают необходимое значение погрешности, выбирают в качестве оценки расстояния до места повреждения такие значения координаты имитируемого места повреждения, при которых вычисляемые значения погрешности меньше заданного значения. 8 ил., 9 табл.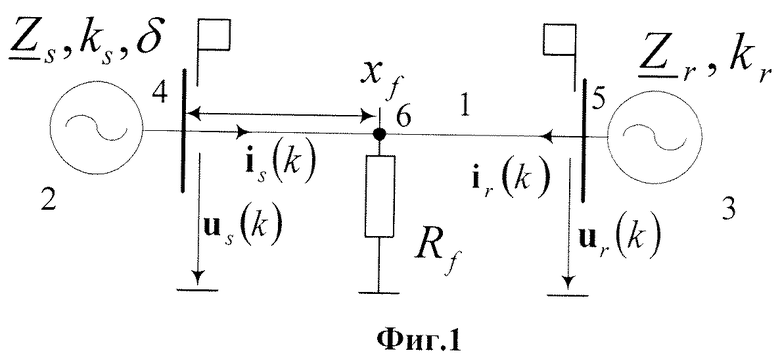
Способ интервального определения места повреждения линии электропередачи с использованием ее модели путем фиксации отсчетов токов и напряжений, преобразования отсчетов в комплексы токов и напряжений, использования имитационной модели линии электропередачи для воспроизведения режимов повреждения линии, отличающийся тем, что проводят имитации повреждений при различных параметрах электропередачи и в различных точках линии электропередачи, вычисляют погрешности между измеренными на объекте и определенными в результате имитации соответствующими токами и напряжениями, задают необходимое значение погрешности, выбирают в качестве оценки расстояния до места повреждения такие значения координаты имитируемого места повреждения, при которых вычисляемые значения погрешности меньше заданного значения.
| СПОСОБ ИНТЕРВАЛЬНОГО ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2016 |
|
RU2639718C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ МНОГОПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ ПРИ ДВУХСТОРОННЕМ НАБЛЮДЕНИИ | 2011 |
|
RU2492493C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ЗАЩИТЫ И ОПРЕДЕЛЕНИЯ МЕСТА ЗАМЫКАНИЯ НА ЗЕМЛЮ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 1999 |
|
RU2149489C1 |
| US 6420876 B1, 16.07.2002 | |||
| US 2010277181 A1, 04.11.2010. | |||

