Ссылка на родственные заявки
По данной заявке испрашивается приоритет на основании заявки на патент США № 13/271852, поданной 12 октября 2011 г., которая полностью включена в данный документ путем ссылки.
Уровень техники
Волоконно-оптические датчики используются в ряде вариантов применения, показывая свою эффективность для измерения параметров в различных средах. Волоконно-оптические датчики могут работать в неблагоприятных средах, таких как скважинные среды, и использоваться для измерения различных параметров среды и/или их составляющих, таких как температура, давление, нагрузка и вибрация.
Системы отслеживания параметров могут быть включены в состав различных компонентов и использованы для измерения нагрузки на компоненте. Например, методики рефлектометрии с колеблющейся длиной волны можно использовать для определения местонахождения нагруженных элементов на волоконно-оптическом датчике и соответственно определения местонахождения источника нагрузки на оптическом волокне и компоненте.
Раскрытие изобретения
Способ оценки расстояния до позиции вдоль оптического волокна включает в себя: формирование оптического сигнала с помощью измерительного блока, причем оптический сигнал имеет длину волны в некотором диапазоне длин волн, оптический сигнал модулируется с использованием модулирующего сигнала с частотой модуляции; передачу модулированного оптического сигнала с источника излучения в оптическое волокно, причем оптическое волокно имеет контакт с подвижным нагружающим элементом, установленным на позиции вдоль оптического волокна, причем оптическое волокно включает в себя множество местоположений обнаружения, выполненных с возможностью отражения света в диапазоне длин волн при нагрузке от нагружающего элемента и передачи света в диапазоне длин волн при отсутствии нагрузки от нагружающего элемента; прием отраженного сигнала, включающего в себя свет, отраженный по меньшей мере из одного из местоположений обнаружения; демодуляцию отраженного сигнала с использованием опорного сигнала для формирования данных отраженного сигнала; и определение расстояния до позиции вдоль оптического волокна на основании данных отраженного сигнала.
Система для оценки расстояния до позиции вдоль оптического волокна включает в себя: источник излучения, выполненный с возможностью формирования оптического сигнала с длиной волны в некотором диапазоне длин волн; оптическое волокно, функционально оптически связанное с источником излучения и находящееся в контакте с подвижным нагружающим элементом, установленным на позиции вдоль оптического волокна, причем оптическое волокно включает в себя множество местоположений обнаружения, выполненных с возможностью отражения света в диапазоне длин волн при нагрузке от нагружающего элемента и передачи света в диапазоне длин волн при отсутствии нагрузки от нагружающего элемента; модулятор, выполненный с возможностью модуляции оптического сигнала с использованием модулирующего сигнала с переменной частотой модуляции за некоторый период времени; детектор, выполненный с возможностью приема отраженного сигнала, включающего в себя свет, отраженный по меньшей мере от одного местоположения обнаружения; и процессор, выполненный с возможностью демодуляции отраженного сигнала с использованием опорного сигнала для формирования данных отраженного сигнала и определения расстояния до позиции вдоль оптического волокна на основании данных отраженного сигнала.
Краткое описание чертежей
Объект, который рассматривается в качестве изобретения, конкретно указан и определенно заявлен в формуле изобретения, приведенной после подробного описания. Вышеизложенные и другие признаки и преимущества изобретения становятся понятны из нижеследующего подробного описания изобретения с сопровождающими чертежами, на которых одинаковые элементы указаны одинаковыми позициями.
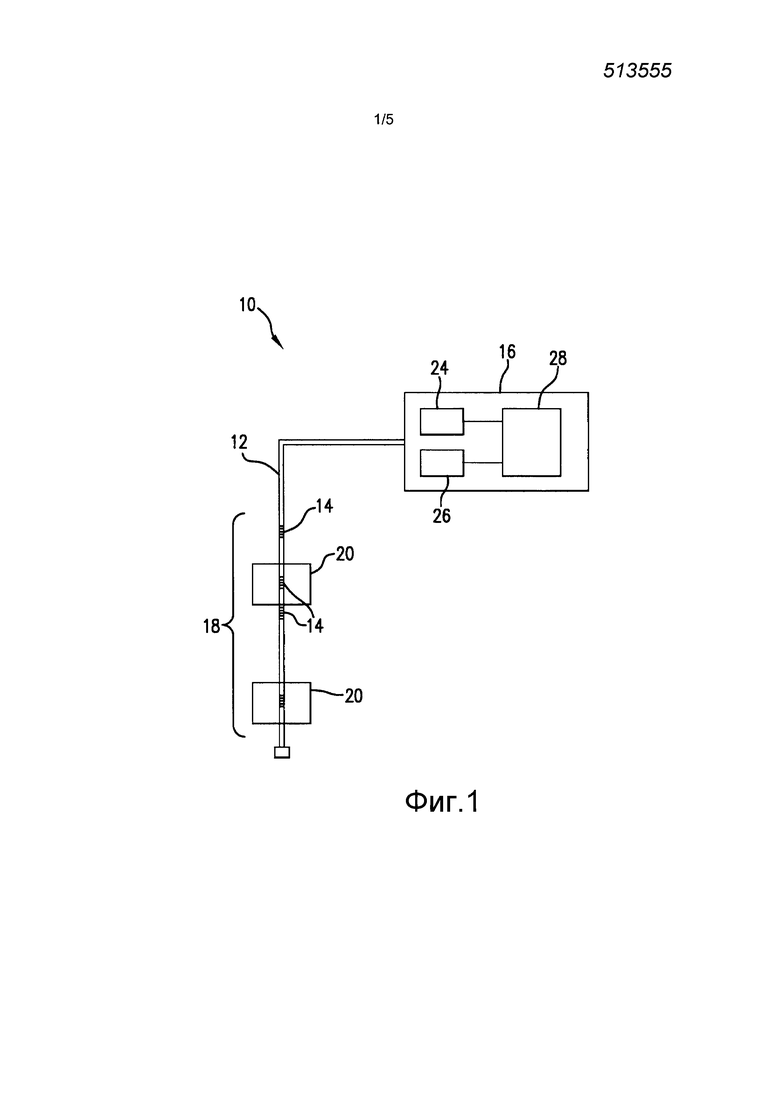
На Фиг. 1 показан пример варианта осуществления системы измерения расстояния.
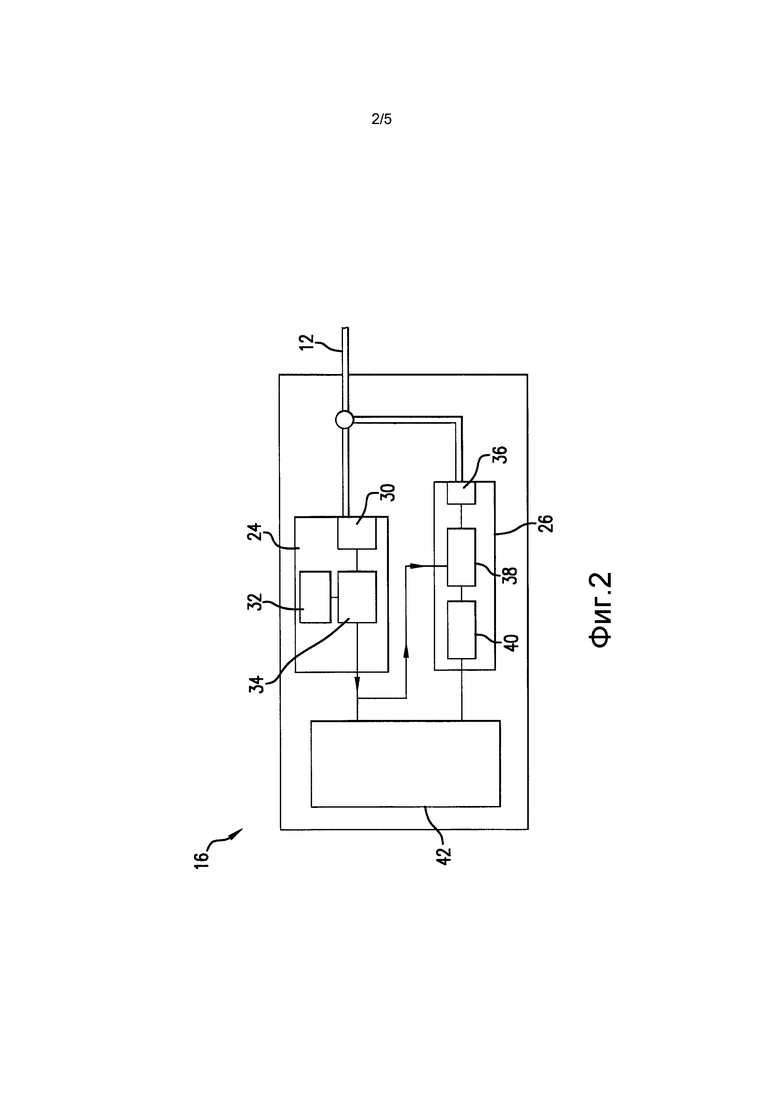
На Фиг. 2 показан пример варианта осуществления измерительного блока системы Фиг. 1.
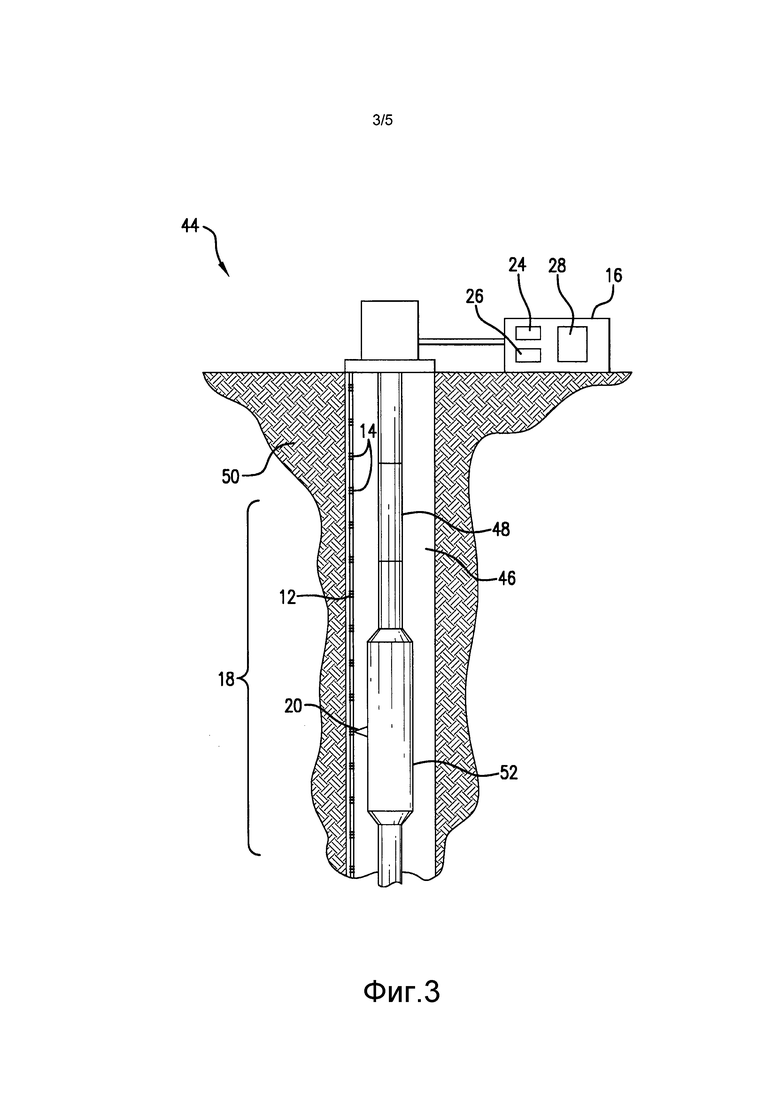
На Фиг. 3 показан пример варианта осуществления скважинной системы бурения, отслеживания, оценки, исследования и/или эксплуатации, которая включает в себя систему измерения расстояния Фиг. 1.
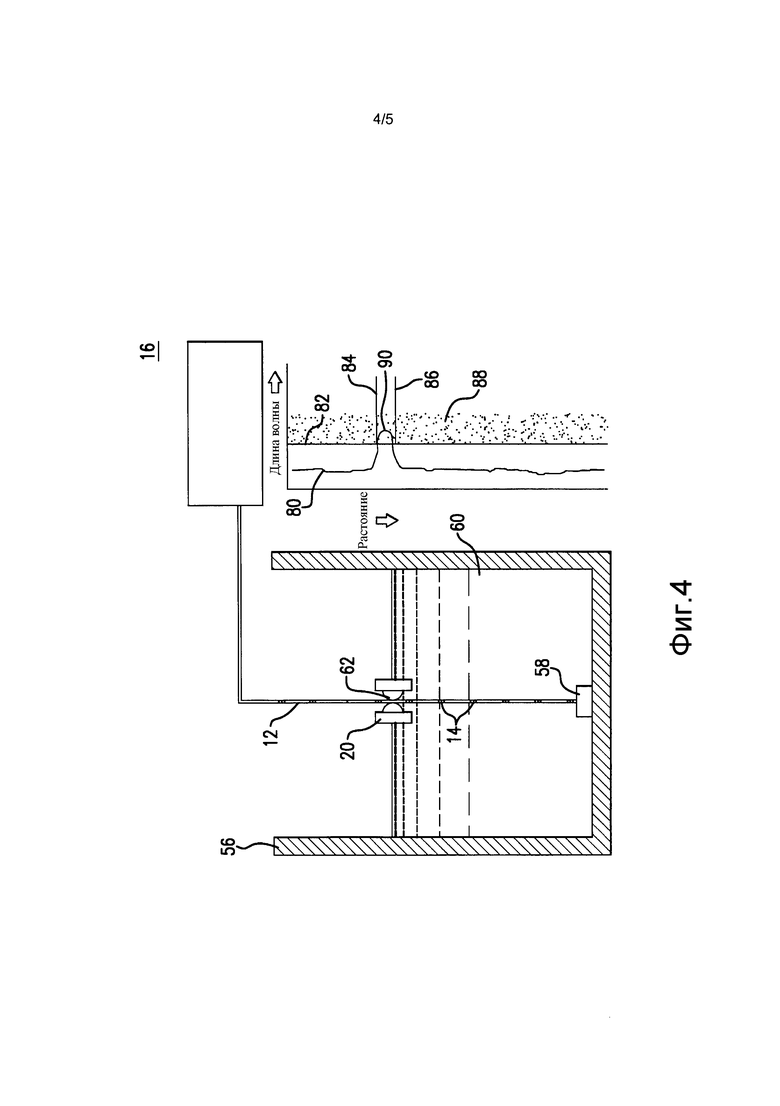
На Фиг. 4 показан пример варианта осуществления системы измерения уровня текучей среды, которая включает в себя систему измерения расстояния Фиг. 1.
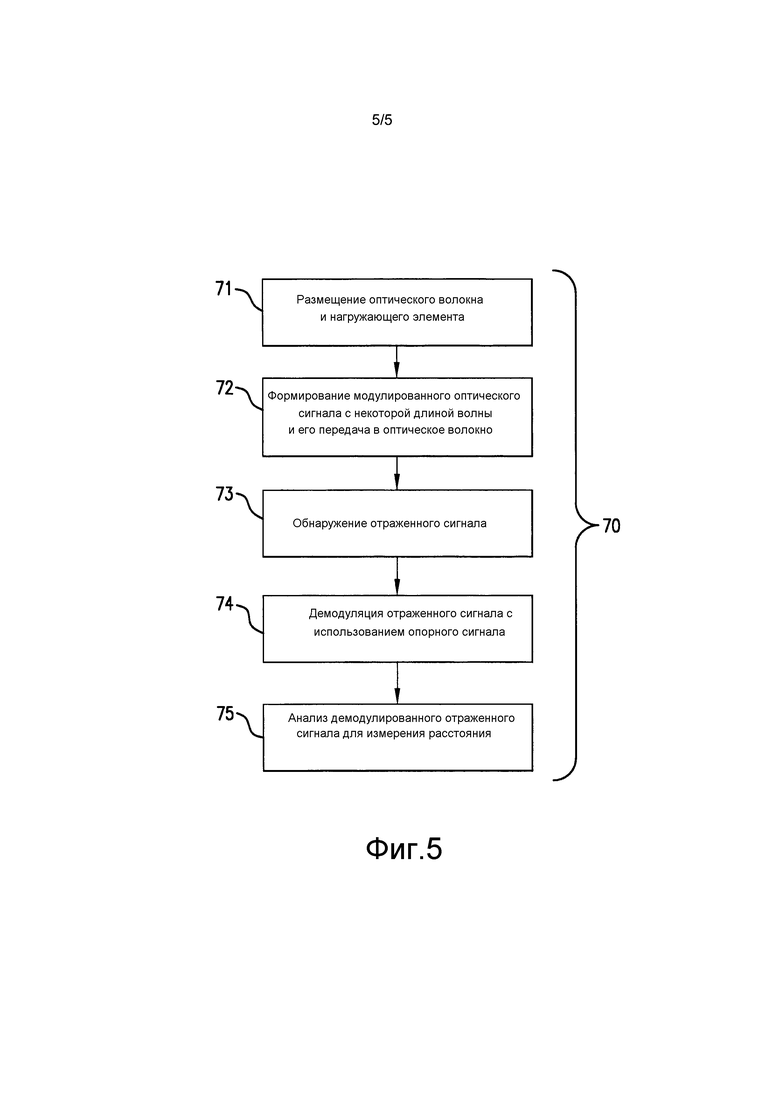
На Фиг. 5 показана блок-схема последовательности операций примера варианта осуществления способа измерения расстояния до позиции вдоль оптического волокна.
Осуществление изобретения
Созданы системы и способы измерения уровня или расстояния, включающие в себя систему измерения некогерентной рефлектометрии. Измерительная система может включать в себя такие элементы, как оптический источник (например, лазер), модулятор и оптическое волокно, которое включает в себя множество местоположений обнаружения (например, волоконные решетки Брэгга). Нагружающий элемент устанавливается относительно компонента или местоположения, расстояние до которого требуется измерить. Нагружающий элемент перемещается вдоль оптического волокна и передает нагрузку на оптическое волокно. Система дополнительно включает в себя детектор и процессор для приема отраженных сигналов из оптического волокна и анализа отраженных сигналов для определения расстояния до местоположения обнаружения на соответствующем месте. Систему можно использовать в неблагоприятных высокотемпературных средах, таких как скважинные среды, и можно также использовать как систему измерения уровня текучей среды.
На Фиг. 1 показан пример варианта осуществления оптической системы 10 обнаружения нагрузки. Система включает в себя оптическое волокно 12 с одним или более местоположениями 14 обнаружения, расположенными вдоль отрезка длины оптического волокна 12. Местоположения 14 обнаружения выполнены с возможностью отражения и/или рассеяния оптических запрашивающих сигналов, передаваемых в оптическое волокно измерительным блоком 16. Отраженные и/или обратно рассеянные сигналы вместе именуются в данном документе «отраженными сигналами» или «сигналами обратной связи». В показанном варианте осуществления по Фиг. 1 местоположения 14 обнаружения являются волоконными решетками Брэгга (FBG). Можно использовать другие чувствительные устройства или элементы, такие как зеркала, резонаторы Фаби-Перо и признаки собственного рассеяния. Типы собственного рассеяния включают в себя рассеяние Рэлея, рассеяние Бриллюэна и рассеяние Рамана. Оптическое волокно 12 может изготавливаться с дискретными или непрерывными решетками. Оптическое волокно 12 может также включать в себя чувствительную зону 18, т.е. любой отрезок длины оптического волокна 12, вдоль которого проводятся требуемые измерения расстояния. Например, чувствительная зона 18 является отрезком длины оптического волокна 12, расположенным по длине ствола скважины в геологическом пласте, или отрезком длины оптического волокна, проходящим в глубину емкости текучей среды (т.е. обычно, перпендикулярно плоскости поверхности текучей среды). Оптическое волокно 12 может быть выполнено в виде кабеля, который включает в себя одно или более оптических волокон и/или других компонентов, таких как придающие прочность элементы, защитные оболочки и электрические проводники.
Один или более нагружающих элементов 20 расположены вдоль оптического волокна 12 и выполнены с возможностью создания нагрузки на оптическое волокно 12 в некотором месте. В одном варианте осуществления элемент 20 обнаружения нагрузки расположен вдоль оптического волокна и соединен или иначе связан с компонентом или местоположением на некотором расстоянии от измерительного блока 16, которое требуется измерить. Например, нагружающий элемент 20 может перемещаться относительно оптического волокна 12 (например, может перемещаться вдоль оси оптического волокна 12) и устанавливаться в фиксированном положении вдоль оптического волокна 12 относительно компонента или требуемого места. Место может являться любым местом, которое требует проведения измерения. Примеры таких мест включают в себя одно или более мест скважинного компонента, поверхности текучей среды в емкости или любое другое место, на котором требуется измерение.
Измерительный блок 16 расположен на конце оптического волокна 12 и включает в себя оптическое запрашивающее устройство, поддерживающее функциональную связь с оптическим волокном 12. Измерительный блок 16 включает в себя, например, источник электромагнитного сигнала или оптический источник 24, такой как светодиод и/или лазер, и детектор 26 сигнала. Оптический источник 24 может являться источником с фиксированной длиной волны. В одном варианте осуществления блок 28 обработки данных поддерживает функциональную связь с источником 24 сигнала и детектором 26 и выполнен с возможностью управления источником 24, приема данных отраженного сигнала с детектора 26 и/или обработки данных отраженного сигнала. Блок 28 обработки данных может включать в себя любое подходящее аппаратное обеспечение и/или программное обеспечение, такое как блок электронной аппаратуры (например, внешний блок приборов (КИП) для формирования возбуждающих и/или модулирующих сигналов и обработки сигналов обратной связи из оптического волокна 12. Систему 10 обнаружения можно использовать в соединении с любым внешним или скважинным оборудованием, конкретно с оборудованием, требующим измерений расстояния в неблагоприятной среде, такой как высокотемпературная среда или среда, неблагоприятная для работы электроники.
В одном варианте осуществления система обнаружения выполнена в виде системы оптической рефлектометрии частотной области (OFDR). В данном варианте осуществления источник 24 включает в себя лазер, который используется для спектрального запроса оптического волокна 12. Рассеянные сигналы, отраженные из мест собственного рассеяния, местоположений 14 обнаружения и других отражающих поверхностей в оптическом волокне 12 можно обнаруживать, демодулировать и анализировать. Каждый рассеянный сигнал можно соотнести с местоположением, например, с помощью математического преобразования или интерферометрического анализа рассеянных сигналов в сравнении с выбранным общим местоположением отражения. Каждый рассеянный сигнал можно интегрировать для реконструкции полной длины и/или формы кабеля.
Пример измерительного блока 16 показан на Фиг. 2. В данном примере измерительный блок является устройством оптической рефлектометрии частотной области. Измерительный блок 16 включает в себя оптический источник 24, например, незатухающей волны (cw) одночастотный (или с одной длиной волны) или перестраиваемый диодный лазер, оптически соединяющийся с оптическим волокном 12. Оптический источник 24 включает в себя, например, лазер 30, источник 32 сигнала и оптический модулятор 34. В одном варианте осуществления от лазера только требуется излучать свет с одной длиной волны.
Источник 32 сигнала, такой как генератор колебаний, выполнен с возможностью формирования электрического модулирующего сигнала. Примером генератора колебаний является интегральная схема DDS (прямого цифрового синтеза). Модулирующий сигнал имеет обычно осциллирующую форму колебания, такую как гармоническая волна, с частотой колебаний, именуемой в данном документе «частотой модуляции». Генератор колебаний формирует колеблющуюся форму сигнала или форму сигнала «с линейной модуляцией» (например, синусоидальную), с частотой модуляции, которая колеблется или изменяется во времени. Например, генератор колебаний формирует сигнал с частотой модуляции, которая изменяется от 200 МГц до 400 МГц. Модулирующий сигнал приводит в действие оптический модулятор 34, вырабатывающий модулированный по амплитуде оптический сигнал.
Модулятор (например, функциональный генератор) 34 поддерживает связь с лазером 30 и модулирует лазер 30 по мощности, интенсивности или амплитуде, используя модулирующий сигнал. Детектор 26 включен в состав для обнаружения отраженных сигналов из оптического волокна 12 в ответ на модулированный оптический сигнал, переданный с оптического источника 24.
Детектор 26 выполнен с возможностью обнаружения сигналов обратной связи и может также выполняться с возможностью обработки сигналов обратной связи для анализа. В одном варианте осуществления детектор 26 включает в себя датчик 36, например, фотодиод, смеситель 38, и аналого-цифровой преобразователь (АЦП) 40. Детектор 36 передает аналоговый сигнал на смеситель 38, который выполнен с возможностью смешивания или демодуляции аналогового сигнала с использованием сигнала демодуляции или опорного сигнала, такого как модулирующий сигнал, используемый в передаче оптического запрашивающего сигнала. Смеситель 38 смешивает сигналы, например, смешивая опорный и отраженный сигналы, и демодулирует амплитуду и фазу отраженного сигнала. Например, выходной сигнал фотодиода может комбинироваться с модулирующим сигналом с генератора 32 колебаний. Выход со смесителя 38 (т.е. демодулированный или смешанный сигнал) может вводиться в аналого-цифровой преобразователь 40 и затем в компьютерный процессор 42.
Как показано на Фиг. 2, процессор 42 соединяется по меньшей мере с детектором 26 и выполнен с возможностью обработки отраженных световых сигналов. Процессор 42 можно реализовать с использованием центрального процессора (ЦП), микроконтроллера, процессора цифровых сигналов или некоторых других программируемых устройств. Процессор 42 может выполняться с возможностью дополнительной обработки демодулированного сигнала. Например, процессор 42 выполнен с возможностью преобразования отраженного сигнала для обеспечения пространственной корреляции сигнала с местоположениями 14 обнаружения, например, с выполнением быстрого преобразования Фурье (БПФ) на отраженных сигналах. В одном варианте осуществления процессор 42 выполнен с возможностью выполнения преобразования Фурье на выходе цифрового смесителя. Результат включает в себя пик в местоположении 14 обнаружения, соответствующем местоположению нагружающего элемента 20. Пик может соответствовать расстоянию до местоположения нагружающего элемента 20. Процессор 42 может также выполнять некоторые алгоритмы аппроксимации кривой и/или обнаружения пика для вычисления расстояния до элемента нагрузки.
Процессор 42 может являться автономным или включенным в состав измерительного блока 16. Различные дополнительные компоненты могут также включаться в состав измерительного блока 16, например, спектральный анализатор, светоделитель, световой циркулятор, измеритель усиления, измеритель фазового сдвига, линза, фильтр и волоконно-оптический соединитель. Отмечается, что различные компоненты для возбуждения, модуляции, обнаружения и обработки не ограничиваются конфигурациями, описанными в данном документе. Например, такие компоненты, как генератор 32 колебаний, оптический модулятор 34, смеситель 38 и аналого-цифровой преобразователь 40 могут выполняться как отдельные компоненты или в составе других процессоров или цепей, таких как процессор 42.
На Фиг. 3 и 4 показаны примеры применения системы 10. На Фиг. 3 показан пример варианта осуществления скважинной системы 44 бурения, отслеживания, оценки, исследования и/или эксплуатации, установленной в стволе 46 скважины. Скважинный канал 48 установлен в стволе 46 скважины, которая проходит по меньшей мере через один геологический пласт 50 для выполнения таких функций, как извлечение породы из поверхности и/или выполнения измерений свойств поверхности 50 и/или ствола 46 скважины. Система 44 и/или скважинный канал 48 включает в себя любое число скважинных инструментов 52 для различных процессов, включающих в себя бурение, добычу углеводородов, и оценки поверхности (FE) для измерения одной или более физических величин в стволе скважины или приствольной зоне. Различные измерительные инструменты 18 можно включать в систему 10 для воздействия на режимы измерения, такие как применение кабельного измерения или применение каротажа во время бурения.
Система 10 обнаружения включена в состав в скважинной системе 44. Измерительный блок 16 установлен, например, на внешней площадке. Оптическое волокно 12 функционально соединяется с измерительным блоком 16 и выполнено с возможностью установки в скважине. В данном примере оптическое волокно неподвижно прикреплено к стволу скважины или другому оборудованию ствола скважины 46 независимо от компонентов, расстояние до которых подлежит измерению. Скважинный компонент, например, инструмент 52 включает в себя нагружающий элемент 20, прикрепленный к инструменту 52 или иначе неподвижно установленный вместе с ним. Например, нагружающий элемент может выполняться в виде выступа, поршня, выдвижного элемента, такого как стабилизатор или любой другой механизм, который может прикладывать силу к оптическому волокну. Может быть включено в состав множество нагружающих элементов 20, требуемых для отслеживания положения различных компонентов.
На Фиг. 4 показан вариант осуществления системы 10 обнаружения, в котором система 10 выполнена в виде системы измерения уровня текучей среды. Оптическое волокно 12 установлено в емкости 56 или другом резервуаре текучей среды. Оптическое волокно может крепиться к днищу емкости или иначе крепиться относительно резервуара, например, грузом 58. Нагружающий элемент 20 в данном варианте осуществления является плавающим элементом, установленным на одной оси с оптическим волокном 12 (например, как кольцо или элемент со сквозным отверстием в нем). Нагружающий элемент 20 перемещается аксиально вдоль оптического волокна 12 на уровне поверхности текучей среды 60 в резервуаре 56. Один или более контактных элементов 62 прикреплены к нагружающему элементу и контактируют с оптическим волокном 12 для прикладывания силы на оптическое волокно 12 и создания нагрузки на оптическое волокно 12 (например, на изгиб или сжатие). В ответ на данную нагрузку волоконная решетка Брэгга или другое местоположение 14 обнаружения отражает оптический сигнал и обуславливает получение пика в сигнале обратной связи, который может соответствовать местоположению вдоль оптического волокна 12. Таким способом можно измерять уровень текучей среды в резервуаре текучей среды.
На оптическом волокне 12 может быть установлено любое число нагружающих элементов 20. Например, система обнаружения по Фиг. 4 может включать в себя множество элементов обнаружения нагрузки, подходящих для множества текучих сред. Один вариант осуществления включает в себя элемент 20 обнаружения нагрузки, подходящий для каждой из множества различных текучих сред (например, нефти и воды) в одной емкости 56. Каждый элемент обнаружения нагрузки может быть выполнен с возможностью плавать на различных уровнях в емкости, например, посредством выбора плавучести или плотности для каждого элемента. Например, плотность первого плавучего или нагружающего элемента 20 обеспечивает возможностью плавать на уровне поверхности раздела между нефтью и водой, и второй элемент выполнен с возможностью плавать на поверхности нефти.
На Фиг. 5 показан способ 70 измерения расстояния. Способ 70 включает в себя один или более этапов 71-75. Хотя способ 70 описан для системы обнаружения, описанной выше, способ 70 не ограничен использованием с данными вариантами осуществления, и может выполняться с помощью измерительного блока 16 или другого устройства обработки данных и/или обнаружения сигнала. В одном варианте осуществления способ 70 включает в себя исполнение всех этапов 71-75 в описанном порядке. Вместе с тем, некоторые этапы можно опускать, можно добавлять этапы или менять порядок этапов.
На первом этапе 71 устанавливают оптическое волокно 12 и нагружающий элемент 20 в среде, в которой измеряют расстояние. В одном варианте осуществления нагружающий элемент 20 прикрепляют или иначе неподвижно устанавливают в компоненте, таком как скважинный канал или скважинный инструмент. В другом варианте осуществления нагружающий элемент 20 располагается и может перемещаться для соответствия требуемому местоположению. Например, нагружающий элемент 20 является плавающим устройством, которое поддерживает элемент на поверхности резервуара текучей среды.
На втором этапе 72 формируется модулированный оптический сигнал с некоторой длиной волны и передается в оптическое волокно 22. В одном варианте осуществления модулятор 34 модулирует мощность, интенсивность и/или амплитуду оптического сигнала согласно синусоидальной или другой осциллирующей функции, имеющей изменяющуюся во времени частоту модуляции. В общем, частоты модуляции находятся в радиочастотном диапазоне, хотя другие частоты можно использовать до нуля Герц. Частота модуляции является колеблющейся, т.е. изменяется модулятором 34 за некоторый период времени, например, со скачкообразным изменением, непрерывным или почти непрерывным изменением (например, линейным изменением, в геометрической прогрессии). Например, модулятор 34 модулирует оптический сигнал с использованием модулирующего сигнала с частотой модуляции, представленной линейной функцией.
Оптический сигнал передается в оптическое волокно 12. В одном варианте осуществления длина волны оптического сигнала является по меньшей мере по существу постоянной и выбирается так, что каждое местоположение 14 обнаружения по меньшей мере по существу передает оптический сигнал, когда нагружающий элемент 20 не действует на местоположение обнаружения, и по меньшей мере частично отраженный оптический сигнал, когда оптическое волокно находится под действием нагрузки от нагружающего элемента 20 в местоположении 14 обнаружения. Например, длина волны оптического источника выбирается лежащей в интервале между центральной длиной волны волоконных решеток Брэгга в оптическом волокне 12 в состоянии покоя (т.е. при отсутствии нагрузки от элемента 20) и центральной длиной волны волоконных решеток Брэгга под действием нагрузки от нагружающего элемента 20. Свет от источника не должен таким образом по существу отражаться волокном в состоянии покоя, но должен отражаться соответствующими волоконными решетками Брэгга, когда они находятся под воздействием нагружающего элемента 20. В других примерах длина волны выбирается равной или близкой центральной длине волны при воздействии нагрузки или по меньшей мере более близкой к центральной длине волны при воздействии нагрузки, чем к центральной длине волны в состоянии покоя. Таким образом, местоположение(я) 14 обнаружения на оптическом волокне 12, где расположен элемент 20 обнаружения нагрузки, должно(ы) отражать оптический сигнал надлежащим образом для формирования пика в полученных в результате данных.
В другом варианте осуществления оптический сигнал модулируется по мощности, интенсивности и/или амплитуде, и длина волны является изменяющейся во времени или колеблющейся, например, в скачкообразном или непрерывном режиме. Когда местоположение 14 обнаружения находится в состоянии покоя, длины волны, равные или близкие первой центральной длине волны (центральной длине волны местоположения 14 обнаружения в состоянии покоя) отражаются обратно на детектор. Когда местоположение 14 обнаружения находится под воздействием нагрузки, отражаются длины волны, равные или близкие второй центральной длине волны (центральной длине волны местоположения 14 обнаружения под воздействием нагрузки). В одном варианте осуществления длина волны оптического сигнала удерживается в диапазоне, который включает в себя длину отраженной волны под воздействием нагрузки (т.е. в выбранном диапазоне вблизи второй центральной длины волны), так что только местоположения 14 обнаружения под воздействием нагрузки отражают оптический сигнал.
На третьем этапе 73 отраженный сигнал обнаруживается детектором 26 и соответствующие данные отраженного сигнала формируются процессором 26. Отраженные сигналы могут включать в себя свет, отраженный и/или обратно рассеянный из местоположений 14 обнаружения. Например, отраженный сигнал получается в результате отражения и/или обратного рассеяния из волоконных решеток Брэгга, расположенный вдоль оптического волокна 12.
Поскольку частота модуляции является колеблющейся (т.е. изменяющейся), входной свет и полученные в результате отраженные сигналы образуются из волн на входе и, таким образом, могут рассматриваться в оптической частотной области. В общем, амплитуда и фаза полученных в результате сигналов измеряются как функция частоты модуляции.
На четвертом этапе 74 отраженный сигнал смешивается или демодулируется с опорным сигналом. В одном варианте осуществления опорный сигнал является одинаковым или аналогичным модулирующему сигналу, используемому для модуляции оптического сигнала, передаваемого в волокно.
В одном варианте осуществления отраженный сигнал демодулируется или смешивается, например, с помощью измерения амплитуды и/или фазы отраженного сигнала относительно опорного сигнала. Демодуляция выполняется за период времени модулированного оптического сигнала. Данная операция демодуляции или смешивания может выполняться любым подходящим электронным смешивающим устройством, например, скалярным анализатором цепей для измерения амплитуды или векторным анализатором цепей для измерения амплитуды и фазы.
Например, выходной сигнал фотодиода 36 смешивается с сигналом линейной модуляции частоты из генератора 32 колебаний. Выходной сигнал из смесителя 38 оцифровывается и передается в процессор 40. Процессор 40 выполняет преобразование Фурье на выходе цифрового преобразователя частоты, и полученные в результате данные включают в себя пик в местоположении нагружающего элемента 20. В одном варианте осуществления, если система 10 включает в себя множество нагружающих элементов, данные могут включать в себя множество пиков в местоположениях элементов. Процессор 40 может также дополнительно обрабатывать результирующие данные (например, выполнять некоторый алгоритм аппроксимации кривой и обнаружения пика) для вычисления расстояния до нагружающего элемента 20.
Примеры запрашивающих оптических сигналов и отраженных сигналов показаны на Фиг. 4. Хотя данные примеры рассмотрены в сочетании с системой измерения уровня текучей среды, их можно использовать с любой оптической волоконной системой измерения расстояния. В следующих примерах оптическое волокно включает в себя группу местоположений 14 обнаружения, установленных по длине оптического волокна.
Кривая 80 показывает центральную длину волны каждого местоположения обнаружения вдоль оптического волокна 12. Как показывает кривая 80, центральная длина волны является по существу постоянной около центральной длины волны в состоянии покоя. С приближением местоположений обнаружения к месту нагружающего элемента, центральная длина волны увеличивается, когда в очередных местоположениях обнаружения увеличивается нагрузка, до достижения максимума в местоположении элемента (элементов) обнаружения нагрузки, соприкасающегося (соприкасающихся) с элементом (элементами) 62.
В одном примере длина волны оптического сигнала поддерживается по существу постоянной на уровне, показанном линией 82. Отраженные сигналы 84 и 86 соответствующие местам, где длина волны оптического сигнала совпадает с центральной длиной волны, обнаруживаются и могут соответствовать расстоянию. Расстояние до нагружающего элемента 20 можно определить, например, взяв среднее местоположений сигналов 84 и 86.
В другом примере длина волны оптического сигнала изменяется или колеблется в диапазоне длин волн, показанный областью 88. При увеличении центральной длины 80 волны вблизи нагружающего элемента 20 центральная длина волны входит в диапазон длин волн, показанный областью 88. Данная группа сигналов (показана участком 90 кривой) обнаруживается, и соответствующий скачок или плавный пик можно анализировать для определения местоположения нагружающего элемента 20, например, обрабатывая данные кривой 90 для идентификации максимума.
На пятом этапе 75 данные отраженного сигнала используются для измерения расстояния до компонента или другого требуемого места вдоль оптического волокна. Например, данные отраженного сигнала анализируют для идентификации одного или более пиков, которые соответствуют месту на волокне, на котором нагружающий элемент 20 расположен. В одном варианте осуществления множество нагружающих элементов 20 может устанавливаться на компоненте или относительно требуемой области, и данные отраженного сигнала соответствуют местоположению чувствительных областей 14. Кроме того, данные отраженного сигнала можно анализировать для расчета различных параметров, например, температуры, давления, вибрации, напряжения и нагрузки скважинных компонентов, химического состава скважинных текучих сред или поверхности, акустических событий и другого.
Например, для способов, которые включают в себя запрос с постоянной длиной волны, между центральной длиной волны в состоянии покоя и центральной длиной волны при нагрузке, идентифицируют два пика, когда центральная длина волны местоположения 14 обнаружения совпадает с длиной волны оптического сигнала. Данные пики можно анализировать, например, вычисляя среднее их местоположений для определения местоположения нагружающего элемента 20.
В другом примере для способов, которые включают в себя запрос в виде оптического сигнала с колеблющейся длиной волны, более плавный пик или скачок можно идентифицировать. Данный скачок можно анализировать для идентификации максимума и корреляции максимума с местоположением нагружающего элемента 20.
Способы и системы, описанные в данном документе, не ограничены использованием волоконных решеток Брэгга. Другие сенсорные элементы или устройства можно также применять, такие как использующие рассеяние Рэлея, рассеяние Рамана и/или рассеяние Бриллюэна. Например, если местоположения 14 обнаружения включают в себя элементы рассеяния Рэлея, отраженный сигнал обрабатывается с помощью систем когерентной рефлектометрии частотной области. Рассеиватель Рэлея можно считать работающим аналогично стохастической волоконной решетке Брэгга. Таким образом, рисунки пиков можно идентифицировать, сравнивая рисунки с известными рисунками, указывающими на нагрузку на волокне. Местоположение таких рисунков можно коррелировать с местоположением нагружающего элемента. В одном варианте осуществления данные рассеяния Рэлея формируют для множества измерений (т.е. множества запрашивающих сигналов), и шум или другие рисунки пиков, которые выглядят по меньшей мере по существу одинаковыми для данных измерений, можно идентифицировать, как соответствующие нагрузки для местоположения нагружающего элемента 20. В одном варианте осуществления для измерений с использованием рассеяния Рамана (например, в системе измерения распределенной температуры с использованием рассеяния Рамана), градиенты температуры можно идентифицировать и использовать для определения местоположения нагрузки. Такие градиенты температуры можно идентифицировать, сравнивая с известными градиентами или сравнивая с величиной градиента температуры относительно других зон оптического волокна 12.
Системы и способы, описанные в данном документе, дают различные преимущества над технологиями уровня техники. Системы и способы обеспечивают относительно простую и недорогую систему для измерения расстояния. Поскольку сенсорный элемент включен лишь в оптическое волокно и не требуется установки какой-либо электронной схемы на месте измерения или около него, система может работать в чрезвычайно неблагоприятных условиях (например, высоких температур), и является по сущности безопасной. Кроме того, источник излучения должен являться только источником с фиксированной длиной волны, и поэтому можно использовать не дорогие источники света.
Системы и способы также потребляют меньше электроэнергии для обработки и сохранения данных по сравнению с уровнем техники технологий с перестраиваемой длиной волны. Что касается отслеживания текучей среды, обычные электронные устройства отслеживания уровня текучей среды используют электронные блоки, установленные в резервуар текучей среды, что требует дополнительного конструктивного решения, делающего электронику безопасной для использования. Методики, описанные в данном документе, не требуют такого дополнительного конструктивного решения, и поэтому проще в изготовлении.
Для поддержки технологий, представленных здесь, можно использовать различные компоненты для анализа, включающие в себя цифровую и/или аналоговую систему. Компоненты системы, такие как измерительный блок 16, процессор 28 и другие компоненты системы 10, могут иметь такие компоненты, как процессор, запоминающее устройство, память, ввод, вывод, канал связи, интерфейсы пользователя, программное обеспечение, процессоры сигналов (цифровые или аналоговые) и другие такие компоненты (например, резисторы, конденсаторы, индукторы и т.п.) для создания операционных и аналитических устройств и способов, раскрытых в данном документе, в любом из множества режимов, известных в данной области техники. Следует учитывать, что данные идеи можно реализовать, но не обязательно в сочетании с набором компьютерных программ, сохраняемых на машиночитаемых носителях, включающих в себя запоминающие устройства (ПЗУ, оперативная память), оптические (ПЗУ на компакт-дисках), или магнитные (дисках, накопителях на жестких дисках), или любого другого типа, при исполнении компьютером способа настоящего изобретения. Данные инструкции могут обеспечивать работу оборудования, управление, сбор и анализ данных и другие функции, которые считает нужными разработчик системы, владелец, пользователь или другой такой персонал в дополнение к функциям, описанным в данном изобретении.
Следует учитывать, что различные компоненты или технологии могут создавать некоторые необходимые и полезные функции или признаки. Соответственно, данные функции и признаки могут являться необходимыми для поддержки прилагаемой формулы изобретения, и ее вариации считаются неотъемлемой частью идей данного документа и раскрытого изобретения.
Изобретение описано со ссылками на примерные варианты осуществления, и следует понимать, что могут быть выполнены различные изменения и элементы могут быть заменены эквивалентами без выхода за рамки объема изобретения. Кроме того, многие изменения должны быть очевидны для применения идей изобретения к приборам, ситуациям или материалам без выхода за рамки его объема. Поэтому изобретение не ограничено конкретным вариантом осуществления, раскрытым как лучший способ его реализации, но должно включать в себя все варианты осуществления, соответствующие объему прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СБОРОЧНЫЙ УЗЕЛ ВИХРЕВОГО РАСХОДОМЕРА КАРМАНА, СОДЕРЖАЩИЙ ДАТЧИК ВОЛОКОННОЙ РЕШЕТКИ БРЭГГА, И СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 2007 |
|
RU2454633C2 |
| Способ и устройство для выполнения синхронизированных векторных измерений | 2019 |
|
RU2788340C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СКВАЖИННАЯ СЕЙСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ НА ОСНОВЕ РЭЛЕЕВСКОГО ОБРАТНОГО РАССЕЯНИЯ | 2012 |
|
RU2561009C2 |
| ИЗМЕРЕНИЕ МИКРОЗАКЛИНИВАНИЙ И ПРОСКАЛЬЗЫВАНИЙ ЗАБОЙНОГО ДВИГАТЕЛЯ C ИСПОЛЬЗОВАНИЕМ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ | 2014 |
|
RU2645312C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ ЗОНДИРОВАНИЕ ФОРМЫ ОБОРУДОВАНИЯ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2013 |
|
RU2636989C1 |
| ДИАГНОСТИЧЕСКАЯ СИСТЕМА С ОПТИЧЕСКИМИ ДАТЧИКАМИ (ВАРИАНТЫ) | 1994 |
|
RU2141102C1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ МОНОВОЛОКОННОЙ ОПТИЧЕСКОЙ ТЕЛЕМЕТРИИ | 2005 |
|
RU2389046C2 |
| ОПТИЧЕСКОЕ СЧИТЫВАНИЕ ПОЛОЖЕНИЯ И/ИЛИ ФОРМЫ | 2010 |
|
RU2541139C2 |
| МОНИТОРИНГ СКВАЖИНЫ | 2010 |
|
RU2693087C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ МНОЖЕСТВЕННЫХ ПАРАМЕТРОВ ТУРБОМАШИННОЙ СИСТЕМЫ | 2009 |
|
RU2513646C2 |
Заявленная группа изобретений относится к волоконно-оптическим датчикам. Заявленный способ оценки расстояния, а также устройство, реализующее указанный способ, включает в себя: формирование оптического сигнала с длиной волны в некотором диапазоне длин волн, причем оптический сигнал модулирован с использованием модулирующего сигнала с частотой модуляции. При этом совершают передачу модулированного оптического сигнала с источника оптического излучения в оптическое волокно, при этом оптическое волокно соприкасается с подвижным нагружающим элементом, установленным на позиции вдоль оптического волокна. Кроме того, оптическое волокно включает в себя множество местоположений обнаружения, выполненных с возможностью отражения света в диапазоне длин волн при нагрузке от нагружающего элемента и передачи света в диапазоне длин волн при отсутствии нагрузки от нагружающего элемента; прием отраженного сигнала, включающего в себя свет, отраженный по меньшей мере от одного из местоположений обнаружения; демодуляцию отраженного сигнала с использованием опорного сигнала для формирования данных отраженного сигнала; и определение расстояния до позиции вдоль оптического волокна на основании данных отраженного сигнала. Технический результат – повышение точности в определении расстояния до позиции вдоль оптического волокна. 2 н. и 19 з.п. ф-лы, 5 ил.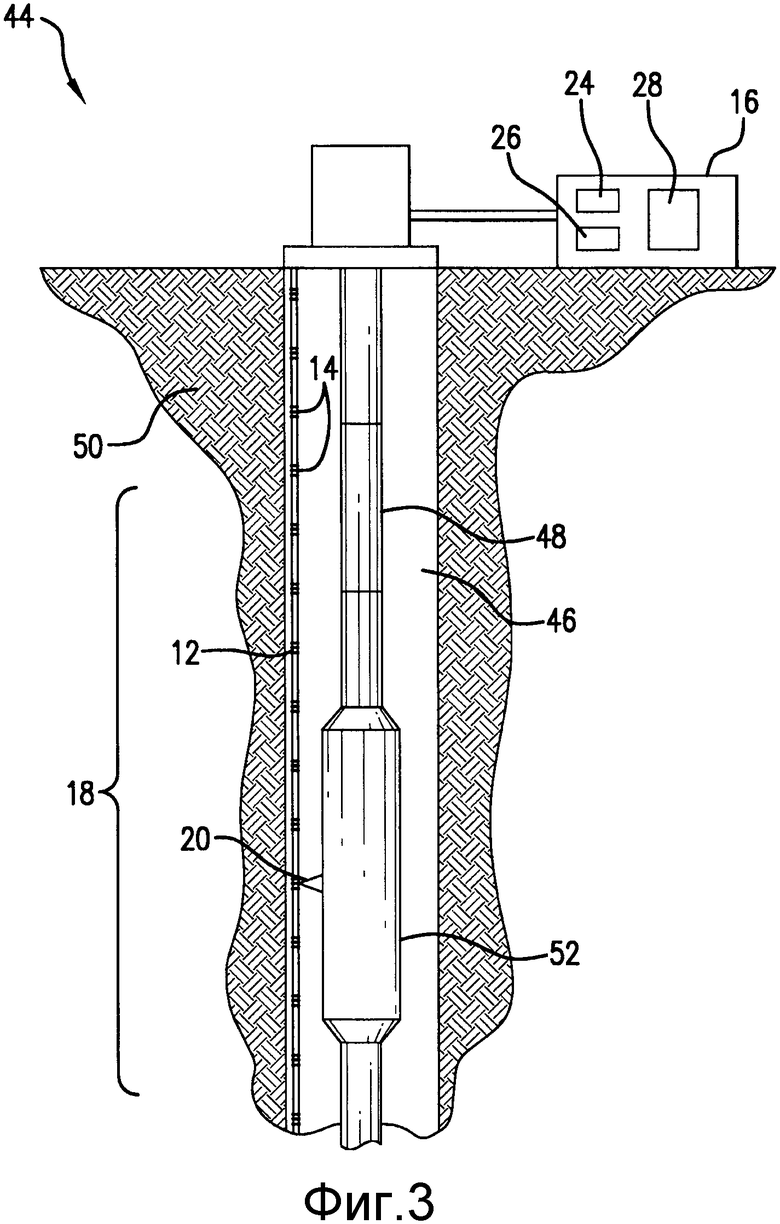
1. Способ оценки расстояния до позиции вдоль оптического волокна, содержащий этапы, на которых:
формируют оптический сигнал посредством измерительного блока, причем оптический сигнал имеет длину волны в некотором диапазоне длин волн, причем оптический сигнал модулируют посредством модулирующего сигнала с частотой модуляции;
передают модулированный оптический сигнал из источника излучения в оптическое волокно, причем оптическое волокно соприкасается с подвижным нагружающим элементом, установленным на позиции вдоль оптического волокна, причем оптическое волокно включает в себя множество местоположений обнаружения, выполненных с возможностью отражения света в диапазоне длин волн под нагрузкой от нагружающего элемента и передачи света в диапазоне длин волн при отсутствии нагрузки от нагружающего элемента;
принимают отраженный сигнал, включающий в себя свет, отраженный по меньшей мере от одного из местоположений обнаружения;
демодулируют отраженный сигнал с использованием опорного сигнала для формирования данных отраженного сигнала; и
определяют расстояние до позиции вдоль оптического волокна на основании данных отраженного сигнала.
2. Способ по п.1, в котором модулирующий сигнал имеет переменную частоту модуляции в течение некоторого периода времени.
3. Способ по п.2, в котором длина волны оптического сигнала является по существу постоянной в течение некоторого периода времени.
4. Способ по п.1, в котором демодуляция отраженного сигнала включает в себя этап, на котором преобразуют данные отраженного сигнала из частотной области в пространственную область для обеспечения набора измерений, соответствующего длине оптического волокна, и определение расстояния включает в себя этап, на котором идентифицируют пик в преобразованных данных отраженного сигнала.
5. Способ по п.1, в котором опорный сигнал имеет по меньшей мере по существу ту же форму, что и модулирующий сигнал.
6. Способ по п.1, дополнительно содержащий этап, на котором устанавливают оптическое волокно в стволе скважины в геологическом пласте и прикрепляют нагружающий элемент к скважинному компоненту, при этом позиция вдоль оптического волокна соответствует местоположению скважинного компонента в стволе скважины.
7. Способ по п.1, дополнительно содержащий этап, на котором размещают оптическое волокно в емкости текучей среды, при этом нагружающий элемент расположен на поверхности текучей среды в емкости и выполнен с возможностью перемещения в ответ на изменение уровня поверхности.
8. Способ по п.1, в котором нагружающий элемент является плавающим элементом, расположенным вокруг оптического волокна и подвижным вдоль оптического волокна.
9. Способ по п.1, в котором множество местоположений обнаружения является множеством волоконных решеток Брэгга, причем каждая волоконная решетка Брэгга имеет первую центральную длину волны, когда находится под нагрузкой от нагружающего элемента, и вторую центральную длину волны при отсутствии нагрузки от нагружающего элемента, причем длина волны оптического сигнала находится между первой центральной длиной волны и второй центральной длиной волны.
10. Способ по п.9, в котором длина волны оптического сигнала является по меньшей мере по существу постоянной, и отраженный сигнал включает в себя пару пиков, соответствующих местоположениям, где центральная длина волны волоконной решетки Брэгга соответствует длине волны оптического сигнала.
11. Способ по п.9, в котором длина волны оптического сигнала изменяется в диапазоне длин волн между первой центральной длиной волны и второй центральной длиной волны, и отраженный сигнал включает в себя кривую, соответствующую волоконным решеткам Брэгга, которые отражают длины волн в диапазоне длин волн.
12. Способ по п.4, в котором преобразование включает в себя этап, на котором применяют быстрое преобразование Фурье к демодулированному отраженному сигналу.
13. Система для оценки расстояния до позиции вдоль оптического волокна, содержащая:
источник излучения, выполненный с возможностью формирования оптического сигнала с длиной волны в некотором диапазоне длин волн;
оптическое волокно, оптически связанное с источником излучения и соприкасающееся с подвижным нагружающим элементом, установленным на позиции вдоль оптического волокна, причем оптическое волокно включает в себя множество местоположений обнаружения, выполненных с возможностью отражения света в диапазоне длин волн при нагрузке от нагружающего элемента и передачи света в диапазоне длины волны при отсутствии нагрузки от нагружающего элемента;
модулятор, выполненный с возможностью модуляции оптического сигнала с использованием модулирующего сигнала, имеющего изменяющуюся частоту модуляции в течение некоторого периода времени;
детектор, выполненный с возможностью приема отраженного сигнала, включающего в себя свет, отраженный по меньшей мере от одного местоположения обнаружения; и
процессор, выполненный с возможностью демодуляции отраженного сигнала с использованием опорного сигнала для формирования данных отраженного сигнала, и определения расстояния до позиции вдоль оптического волокна на основании данных отраженного сигнала.
14. Система по п.13, в которой модулирующий сигнал имеет переменную частоту модуляции в течение некоторого периода времени.
15. Система по п.14, в которой длина волны оптического сигнала является по существу постоянной в течение некоторого периода времени.
16. Система по п.13, в которой процессор выполнен с возможностью преобразования данных отраженного сигнала из частотной области в пространственную область для обеспечения набора измерений, соответствующего длине оптического волокна, и определения расстояния с помощью идентификации пика в преобразованных данных отраженного сигнала.
17. Система по п.13, в которой оптическое волокно выполнено с возможностью размещения в емкости текучей среды, и нагружающий элемент выполнен с возможностью размещения на поверхности текучей среды в емкости и перемещения в ответ на изменения уровня поверхности.
18. Система по п.17, дополнительно содержащая по меньшей мере один дополнительный нагружающий элемент, при этом емкость текучей среды включает в себя первую текучую среду и вторую текучую среду, причем нагружающий элемент выполнен с возможностью размещения на поверхности первой текучей среды, и дополнительный нагружающий элемент выполнен с возможностью размещения на поверхности второй текучей среды.
19. Система по п.13, в которой множество местоположений обнаружения является множеством волоконных решеток Брэгга, причем каждая волоконная решетка Брэгга имеет первую центральную длину волны, когда находится под нагрузкой от нагружающего элемента и вторую центральную длину волны, когда нет нагрузки от нагружающего элемента, причем длина волны оптического сигнала находится между первой центральной длиной волны и второй центральной длиной волны.
20. Система по п.19, в которой длина волны оптического сигнала является по меньшей мере по существу постоянной, и отраженный сигнал включает в себя пару пиков, соответствующих местоположениям, где центральная длина волны волоконной решетки Брэгга соответствует длине волны оптического сигнала.
21. Система по п.19, в которой длина волны оптического сигнала изменяется в диапазоне длин волн между первой центральной длиной волны и второй центральной длиной волны, и отраженный сигнал включает в себя кривую, соответствующую волоконным решеткам Брэгга, отражающим длины волн в диапазоне длин волн.
| US 6671055 B1, 30.12.2003 | |||
| US 7049622 B1, 23.05.2006 | |||
| US 7515273 B2, 07.04.2009 | |||
| US 5062703 A1, 05.11.1991. |

