ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к сооружению скважины и, в частности, к контролю свойств скважинных инструментов во время сооружения скважины.
УРОВЕНЬ ТЕХНИКИ
Скважины, как правило, используют для доступа в области, находящиеся под поверхностью земли, для добычи материалов из этих областей, например, во время разведки и извлечения нефтяных углеводородов из подземного местоположения. Сооружение скважин, как правило, включает в себя бурение ствола скважины и сооружение конструкции труб в стволе скважины. После заканчивания конструкция труб обеспечивает доступ в подземные местоположения и позволяет транспортировать материалы к поверхности.
Во время сооружения скважины обычно используют различные инструменты, и для оценки целостности инструментов в процессе использования могут быть использованы системы контроля. Например, бурильная колонна с оборудованием низа бурильной колонны (bottomhole assembly, BHA) может быть использована для бурения ствола скважины, и системы контроля могут быть использованы для контроля параметров, связанных с целостностью BHA в процессе бурения, чтобы гарантировать, что BHA не будет работать неправильно, подвергаясь воздействию экстремальных условий окружающей среды (например, высокая температура и/или давление). Данные системы контроля позволяют оператору поддерживать скважинные инструменты в безопасных рабочих пределах.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показан пример системы для бурения ствола скважины.
На фиг. 2 приведена схема примера системы контроля.
На фиг. 3 приведена схема примера волокна с брэгговскими решетками.
На фиг. 4 показана интерференция света вследствие отражений в примере волокна.
На фиг. 5A-D показаны различные виды примера BHA и волокна.
На фиг. 6 показан другой пример BHA и волокна.
На фиг. 7A-C показаны различные виды примера соединительного элемента.
На фиг. 8A показан пример бурильной трубы.
На фиг. 8B-C показан пример устройств бурильных труб и соединительных элементов.
Одинаковыми ссылочными символами на различных чертежах обозначены одинаковые элементы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
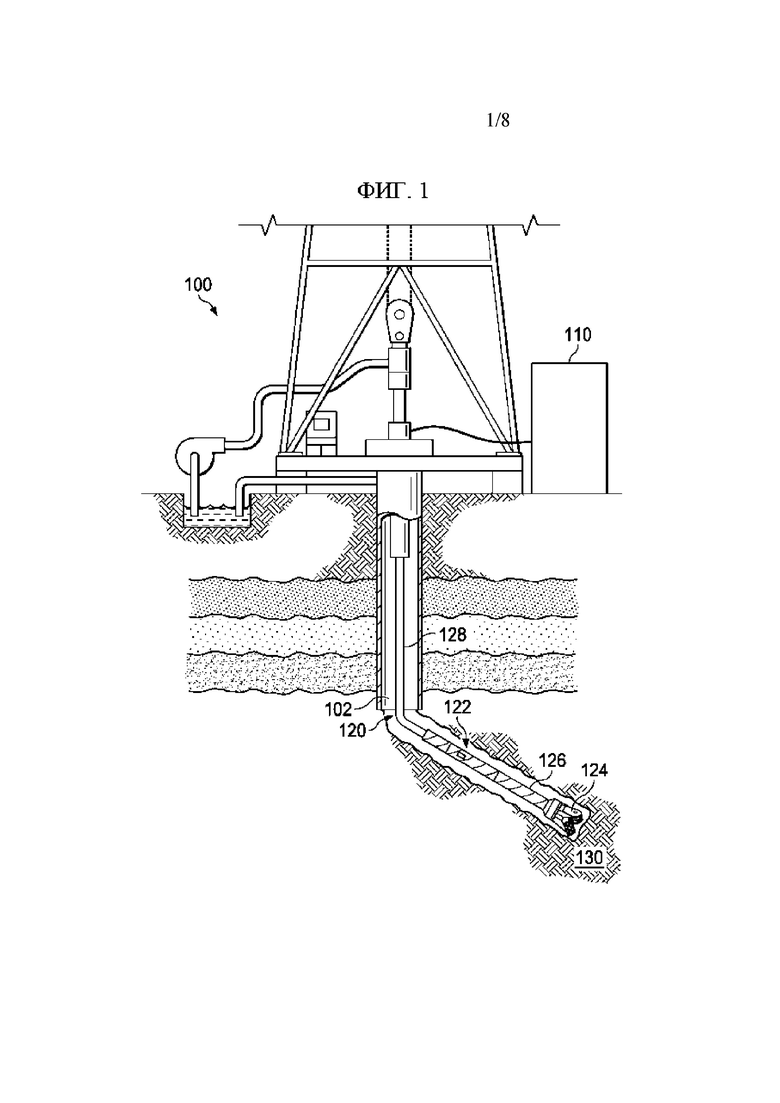
Сооружение скважин, как правило, включает в себя бурение ствола скважины и сооружение конструкции труб в стволе скважины. Например, как показано на фиг. 1, оператор может использовать систему 100 измерений в процессе бурения (measure while drilling, MWD) или каротажа в процессе бурения (logging while drilling, LWD) для бурения ствола 102 скважины. Система 100 содержит блок 110 управления на поверхности и бурильную колонну 120.
Бурильная колонна 120 содержит оборудование 122 низа бурильной колонны (bottom hole assembly, BHA) вдоль ее нижней части и бурильную трубу 128, которая проходит между BHA 122 и блоком 110 управления на поверхности.
BHA 122 является компонентом, который позволяет бурильной колонне 120 выполнять бурение сквозь окружающую среду 130, и обеспечивает механическое усилие и опору, необходимую для выполнения операции бурения. BHA 122 содержит один или больше компонентов для выполнения данных функций. Например, BHA 122 содержит одно или больше буровых долот 124. Буровое долото 124 установлено на конце BHA 122 и содержит один или больше съемных бурильных элементов. В процессе работы буровое долото 124 дробит, соскребает или режет окружающую среду 130 благодаря дробящему или вращательному движению его бурильных элементов.
BHA 122 также содержит одну или больше бурильных труб 126. Бурильные трубы 126 расположены между буровым долотом 124 и бурильной колонной 128 и создают опорную конструкцию для бурового долота 124 и других компонентов BHA 122. Бурильные трубы 126 имеют, как правило, трубчатую форму и обеспечивают прохождение текучих сред от бурильной колонны 128 к буровому долоту 124 через внутренний канал. Бурильные трубы 126 также прилагают нагрузку к буровому долоту 124 и с помощью нагрузки создают направленную вниз силу, необходимую для эффективного забуривания бурового долота 124 в окружающую среду 130.
BHA 122 также может содержать другие компоненты, которые поддерживают работу бурильной колонны 120. Например, BHA 122 может содержать один или больше двигателей (не показано) для работы бурового долота и/или циркуляции бурового раствора.
BHA 122 соединено с поверхностью с помощью бурильной колонны 128. Бурильная труба 128 создает канал для передачи энергии, текучей среды и/или сигналов связи между BHA 122 и блоком 110 управления на поверхности, а также обеспечивает соединение, через которое блок 100 управления на поверхности выполняет подъем, опускание и вращение BHA 122. Используя блок 110 управления на поверхности, оператор может направлять BHA 122 вдоль трехмерных каналов (например, изменяемое бурение перпендикулярно, горизонтально или под промежуточным углом относительно поверхности), создавая ствол 102 скважины.
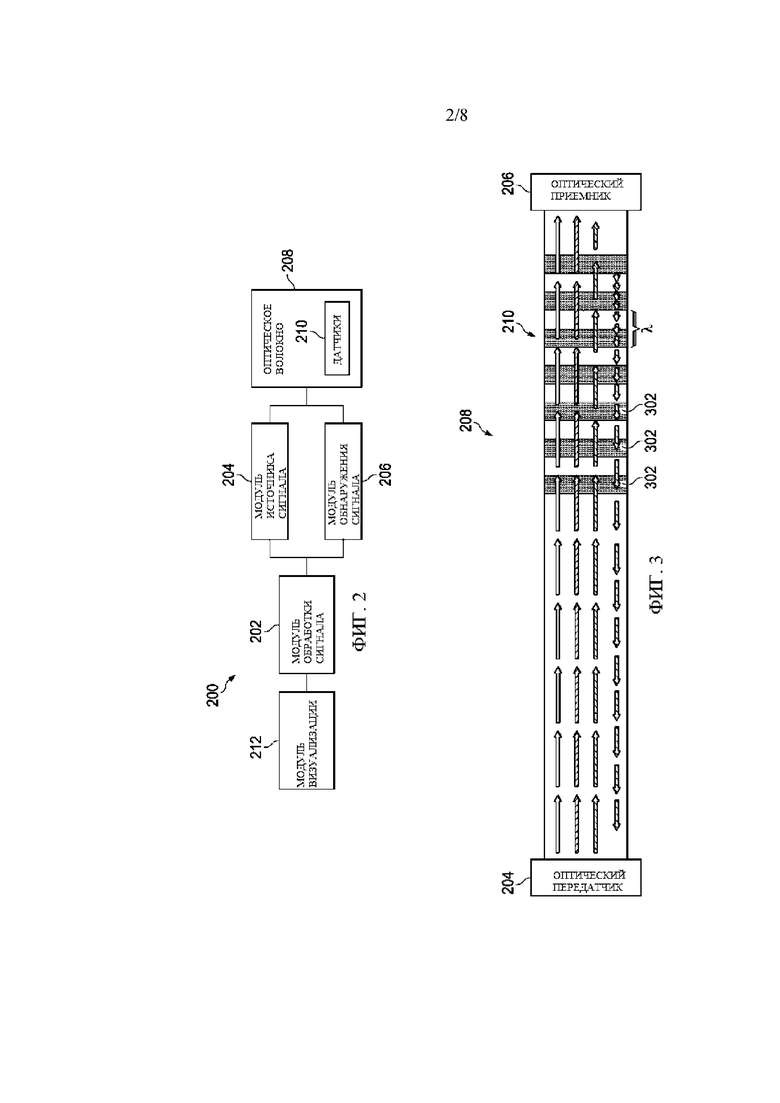
Во время процесса бурения компоненты системы 100, как правило, подвергаются воздействию жестких условий окружающей среды, например, усилие, давление, температура и другие внешние факторы стресса. Когда компоненты системы 100 подвергаются воздействию данных факторов стресса, это может приводить к изменениям температуры компонентов, изменениям формы компонентов (например, искажению формы вследствие давления и/или нагрева) и/или изменениям деформации, нагрузки или давления, испытываемого данными компонентами. В данном примере окружающая среда 130 может прилагать к BHA 122 физическое усилие, которое может увеличивать деформацию или напряжение, испытываемое BHA 122. В другом примере окружающая среда 130 может быть горячее или холоднее, чем BHA 122, и может вызывать нагрев или охлаждение BHA 122 по мере его перемещения сквозь окружающую среду 130. В другом примере окружающая среда 130 может прилагать к BHA 122 физическое усилие, которое может вызывать деформацию BHA 122. Поскольку BHA 122 может быть повреждено, если испытывает сильную деформацию, напряжение, давление и температуру, или, если BHA 122 подвергается сильному изменению формы, оператор использует систему контроля для отслеживания термомеханических свойств BHA (например, деформация, напряжение и давление, испытываемое BHA 112, форма BHA, или температура BHA) в процессе работы, чтобы поддерживать BHA 122 в безопасных рабочих пределах. Данные рабочие пределы, как правило, определяют условия, при которых BHA 122 может работать в безопасном режиме, чтобы не допускать повреждения или разрушения. В общем, рабочие пределы могут отличаться между различными BHA и могут быть определены на основании теоретических пределов безопасности для конкретного BHA, или могут быть определены эмпирическим путем, на основе ранее полученных данных производительности. В некоторых вариантах осуществления безопасные рабочие пределы используют для установления пороговых значений для одного или больше термомеханических свойств, например определения максимальной и/или минимальной безопасной величины для каждого термомеханического свойства. Одно или больше из данных термомеханических свойств BHA 122 можно отслеживать, используя волоконно-оптическую систему контроля, позволяющую оператору остановить или изменить режим работы BHA 122 до превышения опасного порогового значения для BHA. Пример волоконно-оптической системы 200 контроля показан схематически на фиг. 2. Система 200 контроля содержит модуль 202 обработки сигнала, модуль 212 визуализации, модуль 204 источника сигнала, модуль 206 обнаружения сигнала и одно или больше оптических волокон 208. Каждое волокно 208 включает в себя один или больше датчиков 210. Модуль 204 источника сигнала создает оптический сигнал и излучает оптический сигнал в одно или больше оптических волокон 208. Один или больше датчиков 210 вдоль волокна 208 взаимодействуют с оптическим сигналом и изменяют оптический сигнал на основе термомеханических свойств датчика 210. Полученный оптический сигнал обнаруживается модулем 206 обнаружения сигнала. На основе обнаруженного оптического сигнала модуль 202 обработки сигнала определяет данные относительно одного или больше термомеханических свойств датчика 210. Данная информация отображается для оператора, используя модуль 212 визуализации.
Когда оптические волокна 208 располагаются у BHA 122, так что оптические волокна 208 соответствуют форме BHA 122, и подвергаются воздействию таких же внешних факторов стресса, как BHA 122, система 200 контроля обеспечивает оценку термомеханических свойств BHA 122. Таким образом, оператор может использовать систему 200 контроля для наблюдения и отслеживания данных относительно термомеханических свойств BHA 122 во время работы бурильной колонны 120.
Модуль 204 источника сигнала создает свет и модулирует свет для получения оптического сигнала. Модуль 204 источника сигнала соединен с волокном 208 таким образом, чтобы созданные оптические сигналы излучались в волокно 208. Модуль источника сигнала может создавать оптические сигналы с единственной длиной волны, или он может создавать оптические сигналы, состоящие более чем из одной длины волны. Например, в некоторых вариантах осуществления модуль 204 источника сигнала содержит один или больше оптических передатчиков, которые могут создавать спектр оптических сигналов в диапазоне длин волн. В некоторых вариантах осуществления оптические передатчики могут создавать оптические сигналы с изменяющимися скоростями передачи данных. В некоторых вариантах осуществления модуль 204 источника сигнала поддерживает связь с модулем 202 обработки сигнала, и работа модуля 204 источника сигнала может быть управляемой посредством модуля 202 обработки сигнала.
Модуль 204 источника сигнала содержит оптический передатчик, чтобы создавать оптический сигнал. Пример оптических передатчиков включает в себя полупроводниковые устройства, такие как светоизлучающие диоды (light-emitting diodes, LEDs) и лазерные диоды. В некоторых вариантах осуществления оптический передатчик включает в себя LED, которые изготовлены, помимо прочего, например, из арсенида-фосфида индия-галлия или арсенида галлия.
Модуль 206 обнаружения сигнала обнаруживает оптические сигналы, направляемые с помощью волокон 208, и позволяет системе 200 интерпретировать оптические сигналы. Модуль обнаружения сигнала может обнаруживать оптические сигналы в диапазоне длин волн и в диапазоне скоростей передачи данных. В некоторых вариантах осуществления модуль 204 источника сигнала поддерживает связь с модулем 202 обработки сигнала, и данные, собранные модулем 206 обнаружения сигнала, могут быть интерпретированы посредством модуля 202 обработки сигнала.
Модуль 206 обнаружения сигнала содержит оптический приемник. Оптический приемник преобразует свет в электричество, используя фотоэлектрический эффект, и позволяет электрической системе обнаруживать и интерпретировать оптические сигналы. Пример оптических приемников включает в себя фотодетекторы или другие оптоэлектрические преобразователи. В некоторых вариантах осуществления фотодетекторы включают в себя полупроводниковые фотодиоды, которые изготовлены, помимо прочего, из арсенида индия-галлия.
В некоторых вариантах осуществления функции модуля 204 источника сигнала и модуля 206 обнаружения сигнала могут быть объединены. Например, приемопередатчик может быть использован для объединения функций передачи оптического сигнала модуля 204 источника сигнала и функций обнаружения оптического сигнала модуля 206 обнаружения сигнала. В данном примере приемопередатчик включает в себя как оптический передатчик, так и оптический приемник. Оптический передатчик и оптический приемник могут совместно использовать общие компоненты, например общую схему или общий корпус.
В некоторых вариантах осуществления система 200 контроля может измерять одно или больше термомеханических свойств BHA 122 до, во время или после процесса бурения. Например, система 200 контроля может отслеживать давление, деформацию или нагрузку, испытываемую BHA 122, форму BHA 122 или температуру BHA 122 во время операции бурения. В некоторых вариантах осуществления система контроля может собирать данные об одном или больше этих свойств в режиме реального времени, или в режиме, приближенном к режиму реального времени, и отображать эти данные для оператора (например, оператора, использующего блок 110 управления на поверхности), так что оператор имеет возможность контроля работы бурильной колонны 120. В некоторых вариантах осуществления система контроля может сохранять данные, чтобы их можно было извлечь позже.
В некоторых вариантах осуществления система 200 контроля может определять пространственную информацию, относящуюся к термомеханическим свойствам. То есть система 200 контроля может измерять термомеханические свойства и определять местоположение, направление и/или ориентацию измерений относительно бурильной колонны 120. В качестве примера, система 200 контроля может измерять локализованную деформацию, испытываемую BHA 122, и может, кроме того, идентифицировать местоположение на BHA 122, которое испытывает локализованную деформацию, и ориентацию измерений деформации (например, была ли измеренная деформация от датчика, расположенного в верхней части BHA 122, нижней части BHA 122, боковой части BHA 122 и т.д.).
В некоторых вариантах осуществления система 200 контроля может отслеживать форму одного или больше компонентов бурильной колонны 120. Например, система 200 контроля может обнаруживать форму BHA 122 (например, одной или больше бурильных труб 126) и/или бурильной колонны 128. Это позволяет оператору наблюдать форму и относительную ориентацию компонентов бурильной колонны 120, так что оператор может определить, установлены ли и расположены ли компоненты бурильной колонны 120 согласно плану. Это также позволяет оператору определять, если один или больше компонентов согнуты или перекошены во время операции бурения, и позволяет оператору определять, если бурильная колонна 120 согнута или перекошена таким образом, что может повредить или сделать неработоспособной бурильную колонну 120. Таким образом, оператор может использовать систему 200 контроля, чтобы управлять работой бурильной колонны 120 в безопасном режиме.
Модуль 212 визуализации отображает данные, относящиеся к системе 200 контроля, для оператора посредством пульта, или интерфейса, оператора. Отображаемые данные могут включать, например, одно или больше термомеханических свойств, измеренных системой 200 контроля, характеристики системы 200 контроля (например, рабочее состояние системы 200 контроля и/или одного или больше ее компонентов, или рабочие параметры системы 200 контроля), или другие данные, относящиеся к работе системы 200. Данные могут быть выведены либо в виде текстовых данных, графических данных или в виде сочетания текстовых и графических данных. Например, пульт оператора может выводить данные в виде таблиц (например, таблица термомеханических свойств), графиков (например, график изменения термомеханических свойств со временем) или изображений (например, изображение, иллюстрирующее базовые данные об одном или больше термомеханических свойств, или изображение, иллюстрирующее форму компонентов бурильной колонны).
В некоторых вариантах осуществления модуль 202 обработки сигнала отправляет сигнал на пульт оператора, чтобы предупредить оператора, когда измеренное свойство пересекает конкретное пороговое значение, например известный порог безопасности. Например, если измеренное свойство не пересекло пороговое значение, модуль 202 обработки сигнала отправляет соответствующий сигнал на пульт оператора, и пульт оператора обеспечивает индикацию, что BHA 122 работает в безопасном режиме. Если измеренное свойство приближается к пересечению порогового значения, модуль 202 обработки сигнала отправляет соответствующий сигнал на пульт оператора, и пульт оператора обеспечивает индикацию, что BHA 122 приближается к пределам безопасности. Если измеренное свойство пересекает пороговое значение, модуль 202 обработки сигнала отправляет соответствующий сигнал на пульт оператора, и пульт оператора обеспечивает индикацию того, что BHA 122 превысило пределы безопасности. Например, если измеренная форма BHA 122 пересекает конкретное пороговое значение (например, если кривизна превышает конкретный порог кривизны), модуль 202 обработки сигнала отправляет сигнал на пульт оператора, и пульт оператора обеспечивает индикацию того, что форма BHA 122 превысила пределы безопасности.
В некоторых вариантах осуществления модуль 202 обработки сигнала обеспечивает рекомендации на пульте оператора, что помогает пользователю поддерживать BHA 122 в рамках безопасных рабочих пределов. Например, если измеренное свойство приближается к пересечению безопасного предела, модуль 202 обработки сигнала обеспечивает рекомендации на пульте оператора о том, как не допустить небезопасной работы (например, рекомендации извлечь бурильную колонну 120, приостановить или замедлить операции бурения, или изменить другие аспекты работы бурильной колонны 120). Если измеренное свойство пересекает безопасный предел, модуль 202 обработки сигнала обеспечивает рекомендации на пульте оператора о том, как не допустить дальнейшей работы в небезопасном режиме. Рекомендации могут быть выведены для обзора пользователю.
Модуль 202 обработки сигнала и пульт оператора могут обеспечивать индикацию и рекомендации по безопасности на основании недавно полученных измерений или на основании ретроспективных тенденций по множеству измерений. Например, в некоторых вариантах осуществления модуль 202 обработки сигнала и пульт оператора обеспечивает индикацию того, что BHA 122 возвращается в безопасные рабочие пределы, если определяет, что свойство опускается до степени, при которой оно находится ниже порогового значения в течение конкретного периода времени, и обеспечивает рекомендации для продолжения текущей операции. В другом примере модуль 202 обработки сигнала и пульт оператора обеспечивают индикацию того, что BHA 122 работает в небезопасном режиме, если блок 202 обработки сигнала определяет, что свойство повышается до степени, при которой оно превышает пороговое значение в течение конкретного периода времени, и обеспечивают рекомендации для приостановки текущей операции.
В некоторых вариантах осуществления система может автоматически (т.е. без дополнительного ввода данных оператором) останавливать или другим образом изменять операцию BHA, если безопасный предел превышен.
Модуль 212 визуализации может содержать одно или больше устройств вывода данных для представления информации оператору, например индикаторы состояния (например, индикаторные лампы, которые светятся для указания информации), или видеодисплей, такой как дисплей с плоским экраном (например, монитор с жидкокристаллическим дисплеем (LCD)). В некоторых вариантах осуществления модуль 212 визуализации расположен в системе 110 управления на поверхности, чтобы оператор мог видеть информацию, относящуюся к системе 200 контроля, во время работы бурильной колонны 120.
Система 200 контроля может определять термомеханические свойства различными способами. Например, датчики 210 могут представлять собой волоконные датчики с брэгговскими решетками (Fiber Bragg Grating, FGB), которые могут выполнять измерения в одной или больше отдельных точек вдоль волокна 208.Как показано на фиг. 3, пример датчика 210 FGB включает в себя несколько брэгговских решеток 302, расположенных с периодом λ (т.е. длиной волны датчика FBG) по длине одномодового волоконного оптического волокна 208 (т.е. оптического волокна, которое несет один луч света).
В некоторых вариантах осуществления волокно 208 содержит меньший внутренний сердечник (например, примерно от 4 до 9 мкм в диаметре) и наружную часть (т.е. оболочку) большего диаметра (например, около 125 мкм в диаметре). Внутренний сердечник может быть изготовлен, например, из стекла (SiO2) и имеет высокий показатель преломления, вызванный сильным легированием элементом, например, легированием германием. Разность в показателях преломления между внутренним сердечником и оболочкой приводит к распространению света только внутри внутреннего сердечника.
Каждая брэгговская решетка 302 имеет область с показателем преломления, отличающимся от показателя преломления волокна 208, и в результате отражает свет с конкретной полосой частот на границе (т.е. поверхности раздела между решеткой 302 и волокном 208). Например, как показано на фиг. 3, свет, излучаемый модулем 204 источника сигнала, имеющий длины волн λa и λb, не отражается и направляется волокном 208 к модулю 206 обнаружения сигнала. Однако часть света с длиной волны λc отражается границами каждой брэгговской решетки 302 обратно, к модулю 204 источника сигнала, тогда как часть света продолжает движение к модулю 206 обнаружения сигнала. Коэффициент отражения (т.е. часть света, отраженная каждой границей брэгговской решетки) может быть сравнительно малым, например между 0,001% и 0,1%.
Кроме того, поскольку каждая брэгговская решетка 302 отражает свет с различным сдвигом фаз, возникает интерференция, и большая часть отраженного света гасится. Однако отражения с равным сдвигом фаз скапливаются в виде сильных пиков отражения. Это проиллюстрировано на фиг. 4. Верхняя часть фиг. 4 показывает волокно 208 с 10-граничной брэгговской решеткой 402. Свет поступает с левой стороны волокна 208. Ниже показаны три световых луча 404a-c с различными длинами волн. Верхний световой луч 404a имеет определенную длину волны λ0 периода решетки, и все единичные отражения границы отражаются в фазе и поэтому складываются в уровень 406a отраженной энергии, в десять раз больший единичного отражения границы. Следующий световой луч 406b имеет на 10% большую частоту, так что 11 световых периодов λ0+1 имеют длину 10 периодов λ0 решетки. Таким образом, все единичные отражения границы имеют различные фазы и гасятся, что приводит к уровню 406b отраженной энергии нулевой величины. Аналогичный эффект гашения возникает при самом нижнем световом луче 404c, который имеет на 10% меньшую частоту, так что 9 световых периодов λ0-1 имеют длину 10 периодов λ0 решетки, что приводит к уровню 406c отраженной энергии нулевой величины.
Таким образом, ширина полосы отражения и результирующая функция отраженной энергии зависят от длины волны λ датчика FBG. Данная длина волны λ зависит от различных термомеханических свойств, проявляемых волокном 208. Например, деформация и температура связаны с длиной волны λ согласно следующему уравнению:

где
Δλ=сдвиг длины волны,
λ0=начало базовой длины волны,
k=1 - p,
p=коэффициент фотоэлектрического преобразования,
k=калибровочный множитель,
ΔT=изменение температуры в градусах Кельвина, K,
αδ=изменение показателя преломления,

В примере варианта осуществления коэффициент фотоупругости  равен 0,22, калибровочный множитель
равен 0,22, калибровочный множитель  равен 0,78 и изменение показателя преломления
равен 0,78 и изменение показателя преломления  равно
равно  .
.
Первое выражение  уравнения описывает импульс деформации, вызванный усилием
уравнения описывает импульс деформации, вызванный усилием  и температурой
и температурой  . Второе выражение
. Второе выражение  описывает изменение показателя преломления
описывает изменение показателя преломления  стекла, вызванное только температурой.
стекла, вызванное только температурой.
Далее,

где
εm=деформация, вызванная механическим путем,
εT=деформация, вызванная температурой,
ε T= αsp *ΔT,
αsp=коэффициент расширения на градус Кельвина, K, образца.
Это дает следующие уравнения, которые описывают поведение датчика FBG под воздействием как деформации, так и температуры:

и

В случае только датчика температуры брэгговская решетка не деформируется. Сигнал Δλ/λ0 датчика FBG затем изменяется только с температурой. В данном случае  - коэффициент теплового расширения, - коэффициент теплового расширения
- коэффициент теплового расширения, - коэффициент теплового расширения  волокна.
волокна.

или

что дает уравнение для измеряющих температуру датчиков FBG:

Коэффициент расширения волокна является весьма малым. Например, в данном варианте осуществления =0,55*10-6/K. Самый большой импульс вытекает из изменения, зависимого от температуры, показателя преломления .Когда волокно прикреплено к образцу, сигнал Δλ/λ0 датчика FBG изменяется с деформацией  образца и, таким образом, коэффициент теплового расширения равен
образца и, таким образом, коэффициент теплового расширения равен  , а не .Таким образом,
, а не .Таким образом,

что дает уравнение для измеряющего деформацию датчика FBG:

Когда датчик FBG прикреплен к образцу в области без механической деформации  , он работает как датчик FBG температурной компенсации. Его сигнал вычисляют в соответствии с уравнениями:
, он работает как датчик FBG температурной компенсации. Его сигнал вычисляют в соответствии с уравнениями:

Таким образом, датчик FGB может определять данные деформации и температуры в отдельных точках вдоль волокна на основе измерений отраженного сигнала датчика, используя указанные отношения. На основе эти данных также могут быть определены дополнительные данные относительно напряжения в отдельных точках вдоль волокна. Например, для материалов с известным отношением напряжения и деформации могут быть определены данные относительно напряжения как функция измеренной деформации.
В некоторых вариантах осуществления одна или больше длин волн света может быть направлена через волокно 208, и датчик FGB может взаимодействовать с каждой длиной волны света по-разному. В некоторых вариантах осуществления оптический сигнал, включающий спектр света, направляют через волокно 208, и спектр отражения анализируют, чтобы измерять несколько сигналов FBG одновременно. Спектр отражения может быть проанализирован, например, с использованием интерферометра для разделения спектра в соответствии с длинами волн составляющих световых лучей.
В некоторых вариантах осуществления датчики FBG могут быть использованы для определения формы волокна 208. Например, в некоторых вариантах осуществления волокно 208 содержит два или больше сердечников, расположенных с промежутком, причем каждый сердечник включает в себя несколько датчиков 210. Как описано выше, датчики 210 каждого сердечника волокна 208 могут быть использованы для определения данных деформации относительно волокна 208. Если сердечники смонтированы таким образом, что они не расположены в одной плоскости, когда волокно 208 изгибается, каждый сердечник будет испытывать различную деформацию. Разница в деформации между каждым сердечником может быть использована для определения кривизны вдоль отдельных точек по волокну и может быть использована для определения формы волокна 208. Путем определения деформации вдоль нескольких не лежащих в одной плоскости сердечников может быть определен многомерный дифференциальный вектор деформации. Используя дифференциальный вектор деформации, могут быть определены данные о кривизне и форме волокна 208. В примере варианта осуществления волокно 208 с тремя не лежащими в одной плоскости сердечниками может быть использовано для определения данных трехмерной формы волокна 208. В некоторых вариантах осуществления несколько волокон 208, каждое с единичным сердечником, могут быть использованы вместо единственного волокна 208 с несколькими сердечниками. В некоторых вариантах осуществления определение формы может быть выполнено, используя серийно производимые приборы, например, используя опросное устройство распределенного волоконно-оптического датчика, систему с распределенным измерением или оптическим рефлектометром обратного рассеяния линии продуктов компании Luna Innovations Incorporated (Роанок, штат Вирджиния).
В некоторых вариантах осуществления система 200 контроля может определять пространственную информацию, относящуюся к каждому из измерений. То есть система 200 контроля может измерять термомеханические свойства и определять местоположение, направление и/или ориентацию измерений относительно бурильной колонны 120. Это может быть выполнено различными способами. Например, в некоторых вариантах осуществления система 200 контроля может выполнять измерения от отдельных точек волокна 208. Если пространственное расположение волокна 208 известно, система 200 контроля может использовать эти данные для определения конкретного положения и/или ориентации источника измерений. Например, если известно, что волокно 208 навито по спирали вокруг BHA 122, измерения от отдельной точки волокна 208 могут быть соотнесены с конкретной точкой вдоль данной спирали. Данная точка может быть использована для определения местоположения, направления и ориентации измерения относительно бурильной колонны 120. В некоторых вариантах осуществления пространственные данные могут быть определены, частично, на основании измеренной формы волокна 208.
В некоторых вариантах осуществления вместо датчиков FBG система 200 контроля может содержать другие типы датчиков 210, такие как датчики микроизгиба, интерферометрические датчики, датчики поляриметра или сочетания двух или больше различных типов датчиков. Например, датчики 210 могут быть датчиками микроизгиба. В некоторых вариантах осуществления, если волокно 208 подвергают малой деформации (т.е. «микроизгибу»), световые лучи во внутреннем сердечнике волокна могут превышать критический угол внутреннего сердечника. Это приводит к перераспределению энергии между внутренним сердечником и оболочечными модами. Направляемые моды более высокого порядка внутреннего сердечника соединяются с оболочечными модами, что приводит к уменьшению распространения света в волокне. Такое соединение мод может быть достигнуто, например, путем размещения волокна в контакте с рядом периодически расположенных деформаторов. Таким образом, микроизгибы вызывают понижение интенсивности света вследствие утечки света в оболочку. Путем контроля и корреляции потерь интенсивности света могут быть разработаны различные типы датчиков микроизгиба, которые могут обеспечивать измерение усилий, воздействующих на них. В некоторых вариантах осуществления датчики с микроскопическим концом легче выполнить, чем другие типы волоконно-оптических датчиков, и они потенциально могут быть выполнены при пониженных затратах.
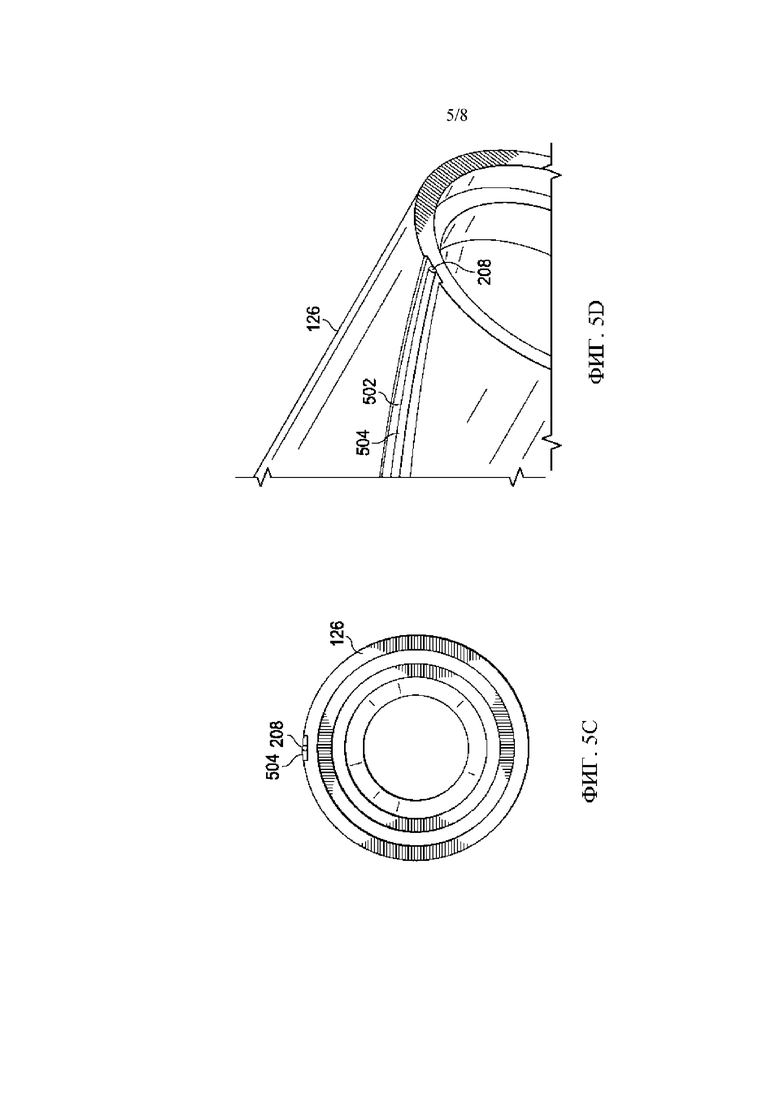
Волокно 208 и его датчики 210 могут быть расположены на одном или больше компонентов системы 100, чтобы отслеживать термомеханические свойства, проявляемые данными компонентами. Например, как показано на фиг. 5A, волокно 208 может быть расположено на бурильной трубе 126 BHA 122. Волокно 208 может быть навито вокруг бурильной трубы 126, например, по спирали, так что оно непрерывно навивается вокруг периметра окружности бурильной трубы 126, когда проходит по длине бурильной трубы 126. Это позволяет системе 200 контроля собирать данные непрерывно вдоль длины по оси бурильной трубы 126, а также непрерывно в радиальных направлениях, окружающих бурильную колонну 126. Волокно 208 согласовано с формой бурильной трубы 126 и закреплено относительно канала, так что какая-либо деформация бурильной трубы 126 приводит к соответствующей деформации волокна 208.
Волокно 208 может быть расположено в канале 502, так что оно утоплено по наружной периферии бурильной трубы 126. Это проиллюстрировано на фиг. 5B, где в увеличенном виде показана обведенная пунктиром область по фиг. 5A. Как и волокно 208, канал 502 может проходить по длине бурильной трубы 126 и может обвивать бурильную трубу 126 по спирали.
В некоторых вариантах осуществления волокно 208 защищено оболочкой 504. Например, как показано на фиг. 5C-D, оболочка 504 окружает волокно 208 в канале 502, защищает волокно 208 от внешней среды и гарантирует, что волокно 208 закреплено относительно бурильной трубы 126. Оболочка 504 может быть нанесена с помощью какого-либо процесса нанесения твердого материала поверх волокна 208, например, методом сварки или плазменной сварки дугой прямого действия (plasma transferred arc, PTA).
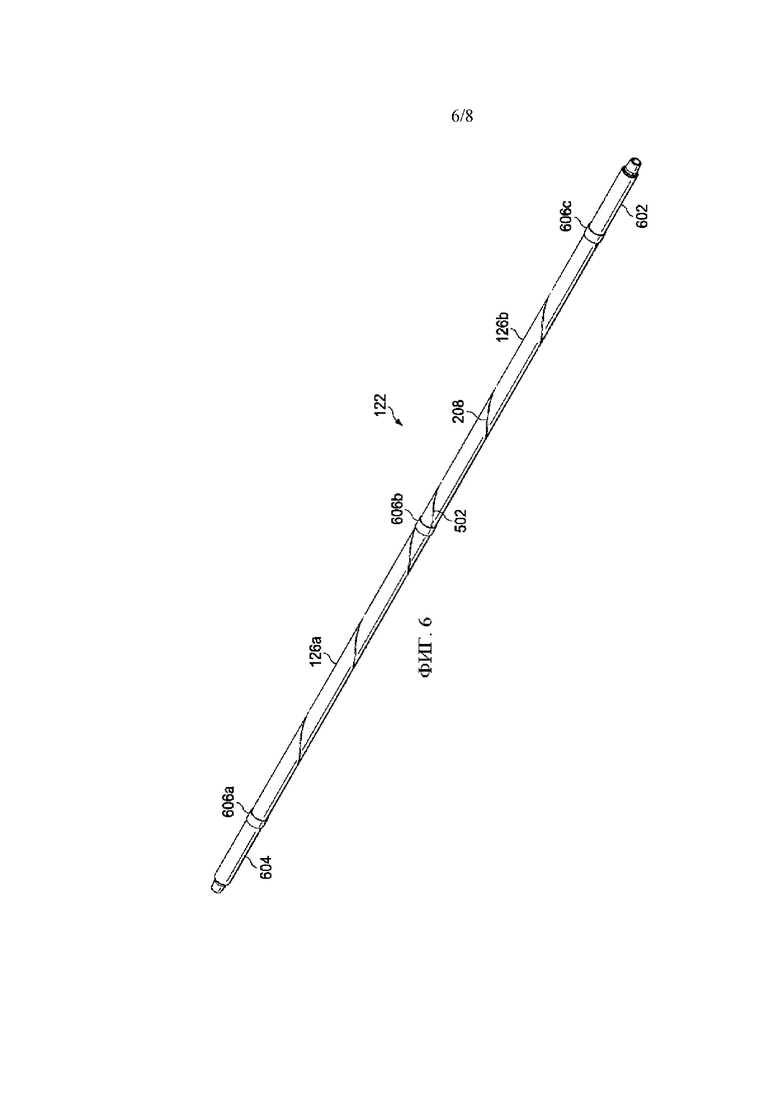
Волокно 208 может соединять другие компоненты системы 200 контроля и системы 100 различными способами. Например, согласно фиг. 6 пример BHA 122 может включать в себя одну или больше бурильных труб 126 с волокном 208, расположенным в канале 502, проходящем вдоль длин бурильных труб 126. Бурильная труба 126 соединена на одном конце оси с элементом 602 источника, который содержит модули 204 источника сигнала (не показано) системы 200. Элемент 602 источника соединен с бурильной трубой 126 вдоль нижней части BHA 122 и обеспечивает точку соединения между волокном 208 и модулями 204 источника сигнала, так что оптический сигнал, создаваемый модулями 204 источника сигнала, направляется вдоль отрезка волокна 208 к верхнему концу BHA 122.
Модули 206 обнаружения сигнала могут быть расположены на конце, противоположном модулям 204 источника сигнала, например в переходных муфтах 604 MWD/LWD, на другой части бурильной колонны 120, или на поверхности (например, на блоке 110 управления на поверхности). Модули 204 источника сигнала связаны с волокном 208 на конце, противоположном модулям 204 источника сигнала, и могут обеспечивать данные о поведении отражения оптических сигналов при прохождении через волокно 208.
Модуль 202 обработки сигнала может быть расположен в различных местоположениях, например вдоль бурильной колонны 120 или на поверхности (например, в блоке 110 управления на поверхности). Модуль 202 обработки сигнала связан с модулями 204 источника сигнала и модулями 206 обнаружения сигнала посредством одного или больше передатчиков сигнала (например, соединения для проводной или беспроводной передачи сигнала). Модуль 202 обработки сигнала управляет работой модулей 204 источника сигнала и модулей 206 обнаружения сигнала и обрабатывает оптический сигнал, чтобы определять данные относительно одного или больше свойств и связанного с этим местоположения и ориентации вдоль волокна 208.
Как показано на фиг. 6, два или больше компонентов бурильной колонны 120 (например, BHA 122) могут быть соединены с помощью соединительного элемента 606. Соединительный элемент 606 обеспечивает надежное соединение между двумя смежными компонентами и позволяет волокну 208 проходить между двумя компонентами. Например, переходная муфта 604 MWD/LWD может быть соединена с бурильной трубой 126a с использованием соединительного элемента 606a. В другом примере две бурильные трубы 126a-b могут быть соединены с использованием соединительного элемента 606b. В еще одном примере бурильная труба 126b и элемент 602 источника могут быть соединены с использованием соединительного элемента 606c. В каждом из этих примеров волокно 208 непрерывно проходит через два соединенных компонента.
Соединительный элемент 606 более подробно показан на фиг. 7A-C. Соединительный элемент 606 является, в общем, трубчатым и содержит выступ 702 на одном конце оси и углубление 704 на другом конце оси. Выступ 702 и углубление 704 позволяют надежно устанавливать соединительный элемент 606 в компонент с соответствующим углублением или выступом соответственно. Соединительный элемент 606 содержит два канала 706 и 708. Канал 706 расположен в центре по оси соединительного элемента 606 и обеспечивает протекание материала между двумя взаимосвязанными компонентами. Например, в некоторых вариантах осуществления, когда соединительный элемент 606b подсоединен между двумя бурильными трубами 126a-b, канал 706 позволяет протекать буровому раствору между каждой из бурильных труб 126a-b. Канал 708 расположен вдоль радиального периметра соединительного элемента 606 и позволяет волокну 208 проходить между двумя взаимосвязанными компонентами. Например, в некоторых вариантах осуществления, когда соединительный элемент 606b подсоединен между двумя бурильными трубами 126a-b, канал 708 позволяет волокну 208 проходить между каналом 502 первой бурильной трубы 126a в канал 502 второй бурильной трубы 126b. Соединительный элемент 606 может также содержать одну или больше муфт 710, которая может скользить над концами соединительного элемента 606, чтобы закреплять точку соединения между соединительным элементом 606 и соединяемым компонентом.
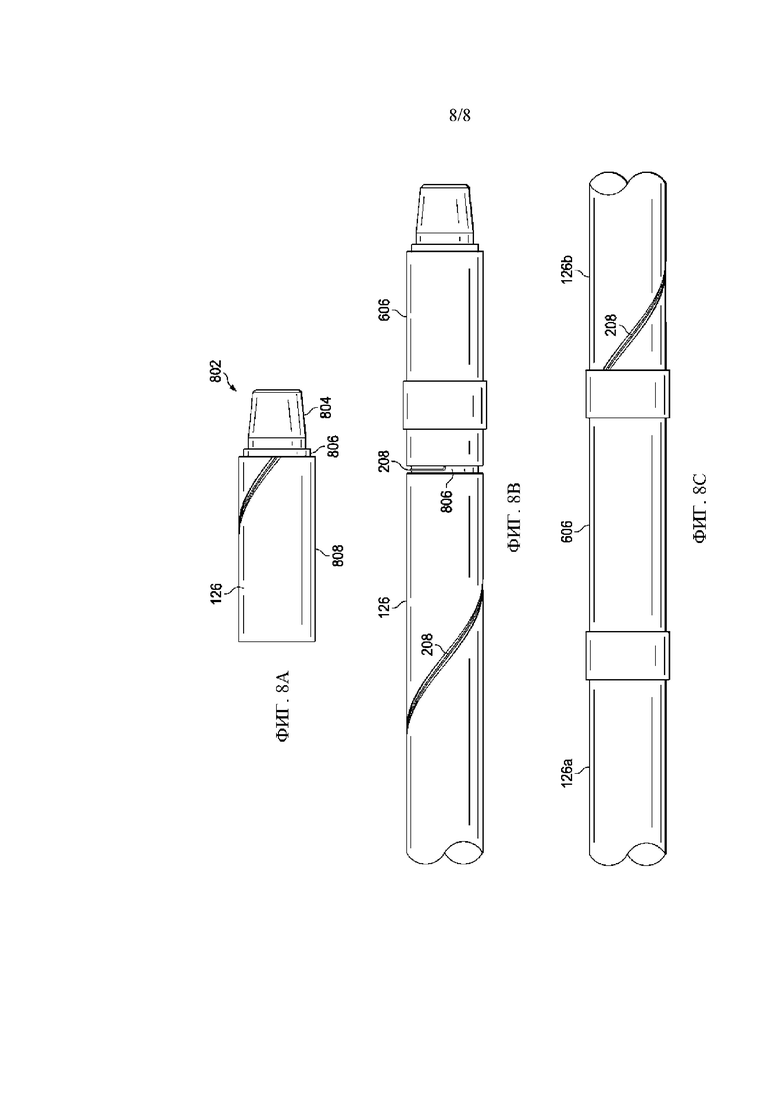
Для обеспечения того, чтобы волокно 208 могло непрерывно проходить между двумя взаимосвязанными компонентами, один или больше компонентов могут содержать один или больше участков с уменьшенными наружными диаметрами. Как показано на фиг. 8A, пример бурильной трубы 126 включает в себя концевой участок 802 с выступом 804, соответствующим углублению 704 соединительного элемента 606. Бурильная труба 126 также содержит участок 806 с уменьшенным наружным диаметром по сравнению с диаметром главного удлинения 808 бурильной трубы 126. Как показано на фиг. 8B, когда выступ 804 бурильной трубы 126 посажен в углубление 704 соединительного элемента 606, участок 806 остается снаружи соединительного элемента 606. Данный участок 806 обеспечивает плавное прохождение волокна 208 из канала 502 бурильной трубы 126 в канал 708 бурильной трубы 606, так что оно может непрерывно проходить между двумя компонентами. Как показано на фиг. 8C, соединительный элемент 606 может быть использован для соединения двух компонентов друг с другом (например, двух бурильных труб 126a-b) таким образом, чтобы волокно 208 непрерывно проходило между каждым из соединенных компонентов.
В некоторых вариантах осуществления может быть использовано больше чем одно волокно 208. Например, бурильная труба 126 может содержать два или больше волокон 208, навитых вдоль ее периферии. Волокна могут быть расположены таким образом, чтобы они находились на одинаковом расстоянии друг от друга (например, были расположены так, чтобы они сохраняли постоянное расстояние друг от друга вдоль бурильной трубы 126), или они могут быть расположены по другим схемам. Например, в некоторых вариантах осуществления волокна 208 могут быть расположены таким образом, чтобы в одном или больше местоположений волокна 208 находились ближе друг к другу, чем в одном или больше других местоположений. В некоторых вариантах осуществления одно или больше волокон 208 объединены в жгут друг с другом, так что каждое из них проходит параллельно в непосредственной близости по их длине протяженности.
В некоторых вариантах осуществления волокно 208 может быть расположено по различным схемам. Например, в некоторых вариантах осуществления волокно 208 может быть навито с переменным шагом, так что оно навивается более часто вокруг определенных участков по сравнению с другими участками. В некоторых вариантах осуществления вместо спиральной схемы волокно 208 может быть расположено таким образом, что оно проходит, по сути, параллельно длине по оси бурильной трубы 126. В некоторых вариантах осуществления волокно 208 может быть расположено в соответствии с любым другим произвольным расположением. В некоторых вариантах осуществления волокно 208 может включать в себя сочетание двух или больше таких расположений. Например, в некоторых вариантах осуществления волокно 208 может иметь участок со схемой постоянной спирали, участок с параллельной схемой и участок со схемой переменной спирали.
В некоторых вариантах осуществления модель 204 источника сигнала и модуль 206 обнаружения сигнала могут быть расположены на одном конце волокна 208, а не на противоположных концах. Модуль 206 обнаружения сигнала может содержать интерферометр для анализа спектра отраженных длин волн света, чтобы определять одно или больше термомеханических свойств.
Способ, описанный выше, может быть воплощен в цифровой электронной схеме или в компьютерном программном обеспечении, встроенной программе или аппаратуре, включая структуры, раскрытые в настоящем описании, и их структурные эквиваленты, или в сочетании одного или больше из них. Например, модуль 202 обработки сигнала может содержать электронный процессор, и электронный процессор может быть использован для обработки оптических сигналов, обнаруженных модулем 206 обнаружения сигнала, чтобы определять одно или больше термомеханических свойств, как описано выше. В другом примере электронный процессор может быть использован для управления работой модуля 204 источника сигнала, модуля 206 обнаружения сигнала и/или модуля 212 визуализации.
Термин «электронный процессор» охватывает все виды аппаратов, устройств и машин для обработки данных, включая, например, программируемый процессор, компьютер, систему на микросхемах или их множество, или сочетания вышеуказанного. Устройство может содержать логические схемы специального назначения, например логическая матрица, программируемая пользователем (FPGA, field programmable gate array), или интегральная схема специального назначения (ASIC, application specific integrated circuit). Устройство может также содержать, в дополнение к аппаратному обеспечению, код, создающий условия выполнения компьютерной программы, о которой идет речь, например, код, создающий процессорную встроенную программу, стек протоколов, систему управления базами данных, операционную систему, межплатформенную среду выполнения, виртуальную машину или сочетание одного или больше из них. Оборудование и среда выполнения позволяют реализовывать разнообразные отличающиеся одна от другой инфраструктуры вычислительной модели - такие, как инфраструктуры веб-сервисов, распределенных вычислений и сетевых параллельных вычислений.
Процессоры, подходящие для выполнения компьютерной программы, включают в себя, например, микропроцессоры общего и специального назначения и один или больше процессоров любого вида цифрового компьютера. Обычно процессор должен принимать команды и данные от постоянного запоминающего устройства или оперативного запоминающего устройства, или от обоих. Основными элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или больше запоминающих устройств для сохранения команд и данных. Вообще, компьютер также должен включать в себя или должен быть функционально связан для приема данных или передачи данных, или их обоих, с одним или больше запоминающих устройств большой емкости, например, магнитные, магнитооптические диски или оптические диски. Однако эти устройства не являются обязательными компонентами компьютера. Кроме того, компьютер может быть встроен в другое устройство, например мобильный телефон, персональный цифровой секретарь (personal digital assistant, PDA), мобильный аудио или видеоплеер, игровую приставку, приемник системы глобального позиционирования (Global Positioning System, GPS) или переносной накопитель (например, флэш-память универсальной последовательной шины (universal serial bus, USB)), к примеру. Устройства, подходящие для хранения команд компьютерной программы и данных, включают в себя все виды энергонезависимой памяти, в том числе, например, полупроводниковые запоминающие устройства, например, EPROM, EEPROM и устройства флэш-памяти; магнитные диски, например, внутренние жесткие диски или сменные диски; магнитооптические диски; и компакт-диски и цифровые диски. Процессор и память могут быть дополнены специализированной логической схемой или включены в ее комплектацию.
В общем, в одном аспекте система включает в себя оборудование низа бурильной колонны (bottomhole assembly, BHA), которое содержит одну или больше бурильных труб и буровое долото, соединенное с одной или больше бурильных труб. Система также содержит систему датчиков для контроля BHA. Система датчиков включает в себя один или больше отрезков оптического волокна, навитого по спирали и проходящего вдоль одной или больше бурильных труб, модуль источника сигнала, расположенный так, чтобы излучать оптический сигнал в один или больше отрезков оптического волокна, модуль обнаружения сигнала, расположенный так, чтобы обнаруживать оптический сигнал, направленный из модуля источника сигнала, по одному или больше отрезков оптического волокна, модуль обработки сигнала, поддерживающий связь с модулем обнаружения сигнала, и пульт оператора, поддерживающий связь с модулем обработки сигнала. Модуль обработки сигнала программируют, чтобы во время работы системы определять данные измерений на основе обнаруженного оптического сигнала о термомеханических свойствах в ряде различных местоположений на одной или больше бурильных труб в то время, когда BHA используют для бурения скважины. Модуль обработки сигнала также программируют, чтобы во время работы системы отправлять сигнал на пульт оператора, когда данные измерений превышают пороговое значение.
Варианты осуществления данного аспекта могут включать в себя одну или больше следующих характеристик. Модуль обработки сигнала может быть, кроме того, запрограммирован, чтобы во время работы системы обеспечивать рекомендации на пульте оператора, основанные на данных измерений и пороговом значении. Термомеханическим свойством может быть деформация. Термомеханическим свойством может быть температура. Термомеханическим свойством может быть давление. Термомеханическим свойством может быть форма BHA. BHA может содержать по меньшей мере две бурильные трубы, соединенные друг с другом посредством соединительного устройства, причем соединительное устройство включает в себя стенку трубчатой формы, проходящую от первого конца и второго конца, и канал между первым концом и вторым концом, и при этом один или больше отрезков оптического волокна проходят через канал, чтобы непрерывно проходить по меньшей мере через две бурильные трубы и соединительное устройство. Один или больше отрезков оптического волокна могут быть расположены в одном или больше каналов, которые проходят по спирали вдоль BHA. Система может, кроме того, содержать защитную оболочку, расположенную в одном или больше каналов. Модуль источника сигнала может быть расположен между одной или больше бурильных труб и буровым долотом. Система может, кроме того, содержать модуль визуализации, поддерживающий связь с модулем обработки сигнала, при этом модуль визуализации программируют для вывода данных измерений и индикации местоположения, соответствующего данным измерений, во время работы системы.
В общем, в другом аспекте способ контроля оборудования низа бурильной колонны (bottomhole assembly, BHA) включает в себя направление оптического сигнала в один или больше отрезков оптического волокна, навитого по спирали вокруг и проходящего вдоль одной или больше бурильных труб BHA, обнаружение оптического сигнала, после того как оптический сигнал направлен по одному или больше отрезков оптического волокна, определение на основе обнаруженного оптического сигнала данных измерений о термомеханических свойствах в ряде различных местоположений на одной или больше бурильных труб, в то время, когда BHA используют для бурения скважины, и отправку сигнала на пульт оператора, когда данные измерений превышают пороговое значение.
Варианты осуществления данного аспекта могут включать в себя одну или больше следующих характеристик. Способ может, кроме того, включать в себя обеспечение рекомендаций для пользователя, основанных на данных измерений и пороговом значении. Термомеханическим свойством может быть деформация. Термомеханическим свойством может быть температура. Термомеханическим свойством может быть давление. Термомеханическим свойством может быть форма BHA. Способ может, кроме того, включать в себя отображение данных измерений и индикацию местоположения на BHA, которое соответствует данным измерений.
В общем, в другом аспекте система датчиков для контроля оборудования низа бурильной колонны (BHA) включает в себя один или больше отрезков оптического волокна, выполненного с возможностью навивки по спирали и проходящего вдоль BHA, модуль источника сигнала, расположенный так, чтобы излучать оптический сигнал в один или больше отрезков оптического волокна, модуль обнаружения сигнала, расположенный так, что принимать оптический сигнал, направленный из модуля источника сигнала, по одному или больше отрезков оптического волокна, модуль обработки сигнала, поддерживающий связь с модулем обнаружения сигнала, и пульт оператора, поддерживающий связь с модулем обработки сигнала. Модуль обработки сигнала программируют, чтобы во время работы системы определять данные измерений о термомеханических свойствах в ряде различных местоположений на BHA и отправлять сигнал на пульт оператора, когда данные измерений превышают пороговое значение.
Варианты осуществления данного аспекта могут включать в себя одну или больше следующих характеристик. Модуль обработки сигнала может быть, кроме того, запрограммирован, чтобы во время работы системы обеспечивать рекомендации на пульте оператора, основанные на данных измерений и пороговом значении. Термомеханическим свойством может быть деформация. Термомеханическим свойством может быть температура. Термомеханическим свойством может быть давление. Термомеханическим свойством может быть форма BHA. Модуль источника сигнала может быть расположен между бурильной трубой и буровым долотом. Система может, кроме того, содержать модуль визуализации, поддерживающий связь с модулем обработки сигнала, при этом модуль визуализации программируют для вывода данных измерений и индикации местоположения на BHA, соответствующего данным измерений, во время работы системы. Система может, кроме того, содержать соединительное устройство, соединяющее первый участок BHA со вторым участком BHA, причем соединительное устройство содержит стенку трубчатой формы, проходящую от первого конца и второго конца, и канал между первым концом и вторым концом, и при этом один или больше отрезков оптического волокна проходят через канал, чтобы непрерывно проходить по меньшей мере через две бурильные трубы и соединительное устройство.
Был описан ряд вариантов осуществления. Другие варианты осуществления находятся в пределах объема следующих пунктов формулы.



Изобретение относится к сооружению скважины и, в частности, к контролю свойств скважинных инструментов во время сооружения скважины. Техническим результатом является поддерживание скважинных инструментов в безопасных рабочих пределах. Система контроля оборудования низа бурильной колонны содержит оборудование низа бурильной колонны, содержащее одну или больше бурильных труб и буровое долото, соединенное с одной или больше бурильных труб, и систему датчиков для контроля BHA, содержащую: один или больше отрезков оптического волокна, навитых по спирали и проходящих вдоль одной или больше бурильных труб, модуль источника сигнала, содержащий источник оптического сигнала, расположенный так, чтобы излучать оптический сигнал в один или больше отрезков оптического волокна, модуль обнаружения сигнала, содержащий приемник оптического сигнала, расположенный так, чтобы обнаруживать оптический сигнал, направленный от модуля источника сигнала по одному или больше отрезков оптического волокна, модуль обработки сигнала, содержащий электронный процессор, выполненный с возможностью осуществления связи с модулем обнаружения, и пульт или интерфейс оператора, выполненный с возможностью осуществления связи с модулем обработки сигнала. При этом модуль обработки сигнала запрограммирован, чтобы во время работы системы: определять данные измерений на основе обнаруженного оптического сигнала о термомеханических свойствах в множестве различных местоположений на одной или больше бурильных труб, в то время как BHA используют для бурения скважины, и отправлять сигнал на пульт или интерфейс оператора, когда данные измерений превышают пороговое значение. 3 н. и 24 з.п. ф-лы, 8 ил.
1. Система контроля оборудования низа бурильной колонны (bottomhole assembly, BHA), содержащая:
оборудование низа бурильной колонны, содержащее одну или больше бурильных труб и буровое долото, соединенное с одной или больше бурильных труб, и
систему датчиков для контроля BHA, содержащую:
один или больше отрезков оптического волокна, навитых по спирали и проходящих вдоль одной или больше бурильных труб;
модуль источника сигнала, содержащий источник оптического сигнала, расположенный так, чтобы излучать оптический сигнал в один или больше отрезков оптического волокна;
модуль обнаружения сигнала, содержащий приемник оптического сигнала, расположенный так, чтобы обнаруживать оптический сигнал, направленный от модуля источника сигнала по одному или больше отрезков оптического волокна;
модуль обработки сигнала, содержащий электронный процессор, выполненный с возможностью осуществления связи с модулем обнаружения, и
пульт или интерфейс оператора, выполненный с возможностью осуществления связи с модулем обработки сигнала,
при этом модуль обработки сигнала запрограммирован, чтобы во время работы системы:
определять данные измерений на основе обнаруженного оптического сигнала о термомеханических свойствах в множестве различных местоположений на одной или больше бурильных труб, в то время как BHA используют для бурения скважины, и
отправлять сигнал на пульт или интерфейс оператора, когда данные измерений превышают пороговое значение.
2. Система по п. 1, в которой модуль обработки сигнала дополнительно запрограммирован, чтобы во время работы указанной системы обеспечивать рекомендации на пульте или интерфейсе оператора, основанные на данных измерений и пороговом значении.
3. Система по п. 1, в которой термомеханическим свойством является деформация.
4. Система по п. 1, в которой термомеханическим свойством является температура.
5. Система по п. 1, в которой термомеханическим свойством является давление.
6. Система по п. 1, в которой термомеханическим свойством является форма BHA.
7. Система по п. 1, в которой BHA содержит по меньшей мере две бурильные трубы, соединенные друг с другом посредством соединительного устройства;
при этом соединительное устройство содержит стенку трубчатой формы, проходящую от первого конца и второго конца, и канал между первым и вторым концом;
при этом один или больше отрезков оптического волокна проходят через канал, чтобы непрерывно проходить по меньшей мере через две бурильных трубы и соединительное устройство.
8. Система по п. 1, в которой один или больше отрезков оптического волокна расположены в одном или больше каналов, которые проходят по спирали вдоль BHA.
9. Система по п. 8, кроме того, содержащая защитную оболочку, расположенную в одном или больше каналов.
10. Система по п. 1, в которой модуль источника сигнала расположен между одной или больше бурильных труб и буровым долотом.
11. Система по п. 1, дополнительно содержащая модуль визуализации, выполненный с возможностью осуществления связи с модулем обработки сигнала, при этом модуль визуализации запрограммирован для вывода данных измерений и индикации местоположения, соответствующего данным измерений, во время работы системы.
12. Способ контроля оборудования низа бурильной колонны (bottomhole assembly, BHA), включающий в себя:
направление оптического сигнала в один или больше отрезков оптического волокна, навитого по спирали и проходящего вдоль одной или больше бурильных труб BHA;
обнаружение оптического сигнала, после того как оптический сигнал направлен по одному или больше отрезков оптического волокна;
определение на основе обнаруженного оптического сигнала данных измерений о термомеханических свойствах в множестве различных местоположений на одной или больше бурильных труб, в то время как BHA используют для бурения скважины, и
отправку сигнала на пульт или интерфейс оператора, когда данные измерений превышают пороговое значение.
13. Способ по п. 12, дополнительно включающий в себя обеспечение рекомендаций для пользователя, основанных на данных измерений и пороговом значении.
14. Способ по п. 12, в котором термомеханическим свойством является деформация.
15. Способ по п. 12, в котором термомеханическим свойством является температура.
16. Способ по п. 12, в котором термомеханическим свойством является давление.
17. Способ по п. 12, в котором термомеханическим свойством является форма BHA.
18. Способ по п. 12, кроме того, включающий в себя отображение данных измерений и индикацию местоположения на BHA, которое соответствует данным измерений.
19. Система датчиков для контроля оборудования низа бурильной колонны (bottomhole assembly, BHA), содержащая:
один или больше отрезков оптического волокна, выполненных с возможностью навивки по спирали и прохождения вдоль BHA;
модуль источника сигнала, содержащий источник оптического сигнала, расположенный так, чтобы излучать оптический сигнал в один или больше отрезков оптического волокна;
модуль обнаружения сигнала, содержащий источник оптического сигнала, расположенный так, чтобы принимать оптический сигнал, направленный от модуля источника сигнала по одному или больше отрезков оптического волокна;
модуль обработки сигнала, содержащий электронный процессор, выполненный с возможностью осуществления связи с модулем обнаружения, и
пульт или интерфейс оператора, выполненный с возможностью осуществления связи с модулем обработки сигнала,
при этом модуль обработки сигнала запрограммирован, чтобы во время работы системы:
определять данные измерений о термомеханических свойствах в множестве различных местоположений на BHA и
отправлять сигнал на пульт или интерфейс оператора, когда данные измерений превышают пороговое значение.
20. Система по п. 19, в которой модуль обработки сигнала, кроме того, запрограммирован, чтобы во время работы системы обеспечивать рекомендации на пульте или интерфейсе оператора, основанные на данных измерений и пороговом значении.
21. Система по п. 19, в которой термомеханическим свойством является деформация.
22. Система по п. 19, в которой термомеханическим свойством является температура.
23. Система по п. 19, в которой термомеханическим свойством является давление.
24. Система по п. 19, в которой термомеханическим свойством является форма BHA.
25. Система по п. 19, в которой модуль источника сигнала расположен между бурильной трубой и буровым долотом.
26. Система по п. 19, дополнительно содержащая модуль визуализации, выполненный с возможностью осуществления связи с модулем обработки сигнала, при этом модуль визуализации запрограммирован для вывода данных измерений и индикации местоположений на BHA, соответствующих данным измерений, во время работы системы.
27. Система по п. 19, дополнительно содержащая соединительное устройство, которое соединяет первый участок BHA со вторым участком BHA;
при этом соединительное устройство содержит стенку трубчатой формы, проходящую от первого конца и второго конца, и канал между первым и вторым концом;
при этом один или больше отрезков оптического волокна проходят через канал, чтобы непрерывно проходить по меньшей мере через две бурильных трубы и соединительное устройство.
| US 20080066960 A1, 20.03.2008 | |||
| US 6176323 B1, 23.01.2001 | |||
| US 5524937 A1, 11.06.1996 | |||
| US 20110225111 A1, 15.09.2011. |

