ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение, в общем, относится к периферийному устройству регулирования и, более конкретно, к периферийным устройствам регулирования, имеющим заданные состояния ошибки, и соответствующим способам.
УРОВЕНЬ ТЕХНИКИ
[0002] В системах управления технологическими процессами для управления и (или) контроля технологических параметров используются различные периферийные устройства. Периферийные устройства, такие как клапаны, обычно имеют соответствующие компоненты, например, контроллер клапана и (или) преобразователь положения, которые регулируют положение рабочего элемента периферийного устройства и (или) передают информацию, касающуюся периферийного устройства, с целью реализации одного или большего числа процессов и (или) выполнения операций на технологической установке. Пример осуществления клапанного узла содержит пневматический привод диафрагменного типа, управление которым осуществляет электропневматический контроллер положения клапана. На контроллер положения клапана, например, от блока или системы управления (например, размещенной в операторной) подается сигнал управления. Указанный сигнал (сигналы) управления преобразуется контроллером положения в одно или большее число значений давления пневматической системы, в результате чего пневматический привод выполняет открывание, закрывание или сохранение текущего состояния соответствующего периферийного устройства или клапана. Однако в некоторых случаях в технологической системе может возникнуть ошибка или отказ, влияющий на точность или надежность функционирования клапана. Например, может произойти прерывание или прекращение обмена данными между контроллером и системой управления. В этом случае сигнал от системы управления на контроллер не подается и, таким образом, устройство регулирования расхода остается в последнем фактическом положении или состоянии, полученном до возникновения отказа.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0003] Пример осуществления способа управления периферийным устройством, описанный в настоящем документе, включает этапы приема контроллером, подключенным к периферийному устройству, от удаленной системы управления данных, предназначенных для управления периферийным устройством регулирования в условиях отсутствия ошибки, определения возникновения состояния ошибки и обеспечения функционирования периферийного устройства регулирования на основе инструкции, касающейся заданного состояния ошибки и записанной в памяти контроллера, которая выполняется при возникновении указанного состояния ошибки.
[0004] Другой пример способа управления системой регулирования расхода, описанного в настоящем документе, включает этапы контроля рабочего параметра системы управления технологическим процессом, определения возникновения состояния ошибки на основании соответствующего рабочего параметра и обеспечения функционирования периферийного устройства регулирования с использованием местного контроллера, функционально связанного с периферийным устройством регулирования, на основании, по меньшей мере, одного параметра или инструкции, касающейся заданного состояния ошибки и записанной в контроллере, при обнаружении возникновения состояния ошибки.
[0005] Пример осуществления системы управления периферийными устройствами, описанной в настоящем документе, содержит устройство регулирования расхода, предназначенное для регулирования расхода технологической текучей среды, и контроллер, установленный на устройстве регулирования расхода. Указанный контроллер функционально связан с периферийным устройством регулирования и предназначен для получения от удаленной системы команд управления положением периферийного устройства регулирования. Контроллер содержит местную систему управления, предназначенную для управления периферийным устройством регулирования на основании параметра, касающегося заданного состояния ошибки и записанного в памяти местной системы управления, при обнаружении возникновения состояния ошибки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 иллюстрирует систему управления технологическим процессом, содержащую пример осуществления контроллера, описанного в настоящем документе.
[0007] Фиг. 2 иллюстрирует структурную схему примера осуществления контроллера, указанного на фиг. 1.
[0008] Фиг. 3 иллюстрирует структурную схему примера осуществления способа, который может быть реализован при использовании контроллера, представленного на фиг. 1 и 2.
[0009] Фиг. 4 иллюстрирует структурную схему примера осуществления процесса, который может быть реализован с использованием контроллера, представленного на фиг. 1 и 2.
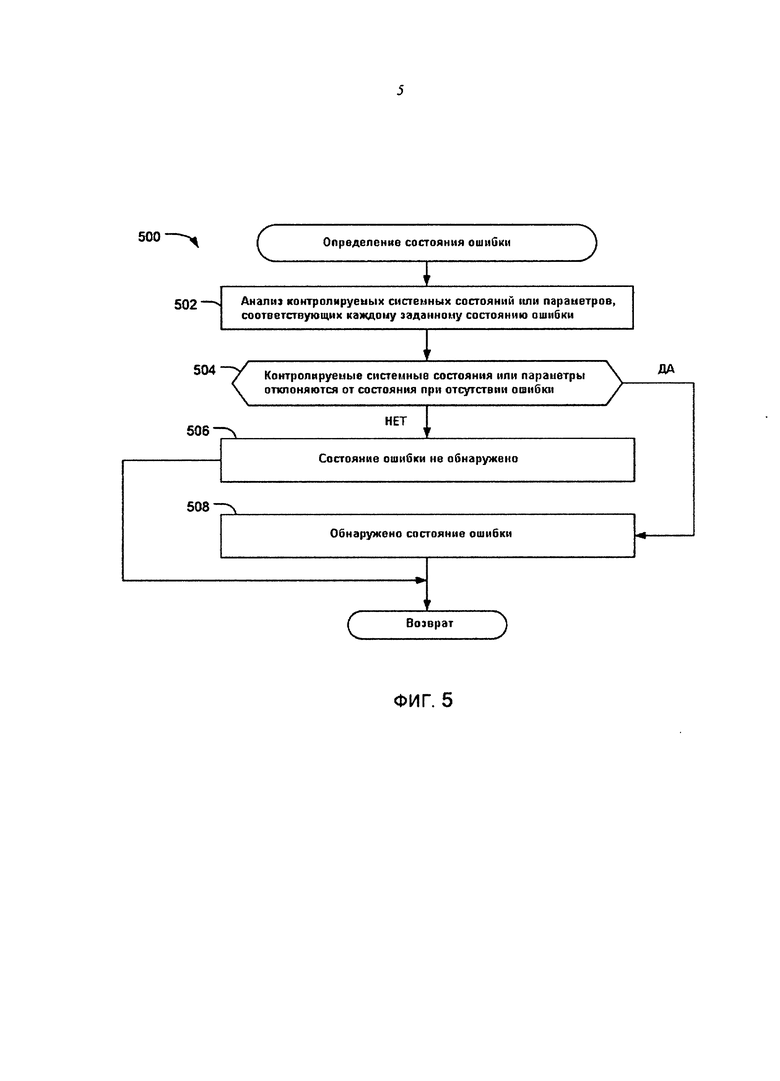
[0010] Фиг. 5 иллюстрирует структурную схему примера осуществления процесса, указанного на фиг. 4, который обеспечивает обнаружение возникновения состояния ошибки.
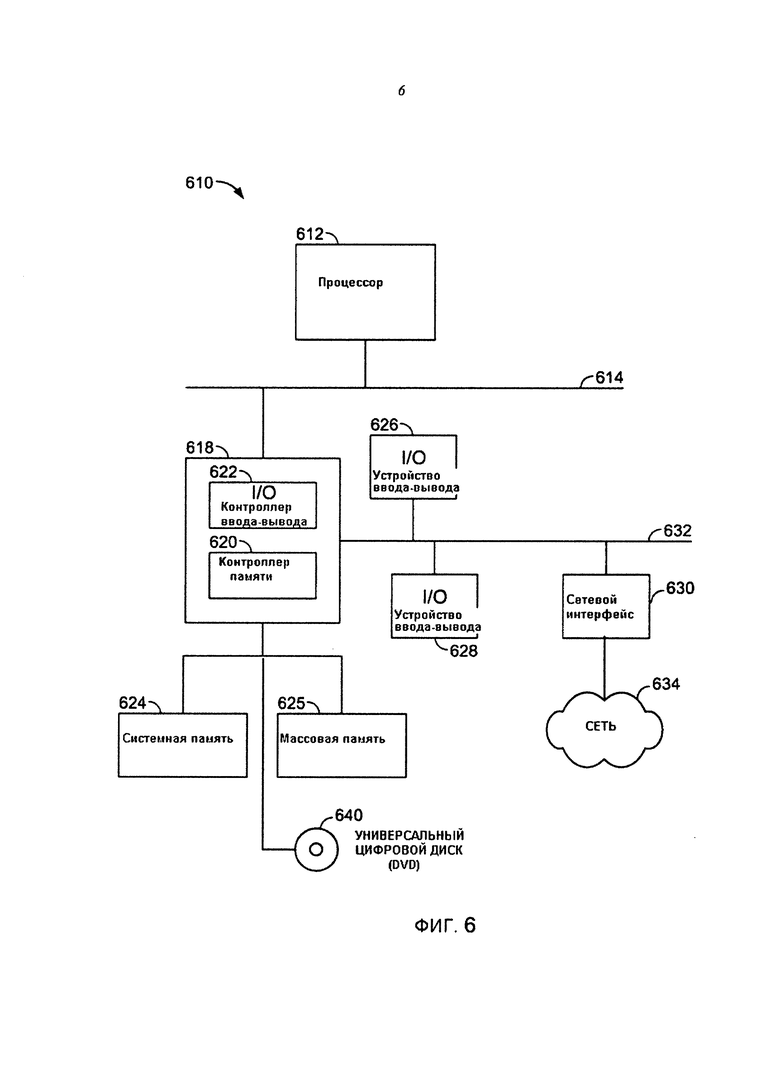
[0011] Фиг. 6 иллюстрирует структурную схему примера осуществления процессорной системы, которая может быть использована для реализации способа и устройства, описанных в настоящем документе.
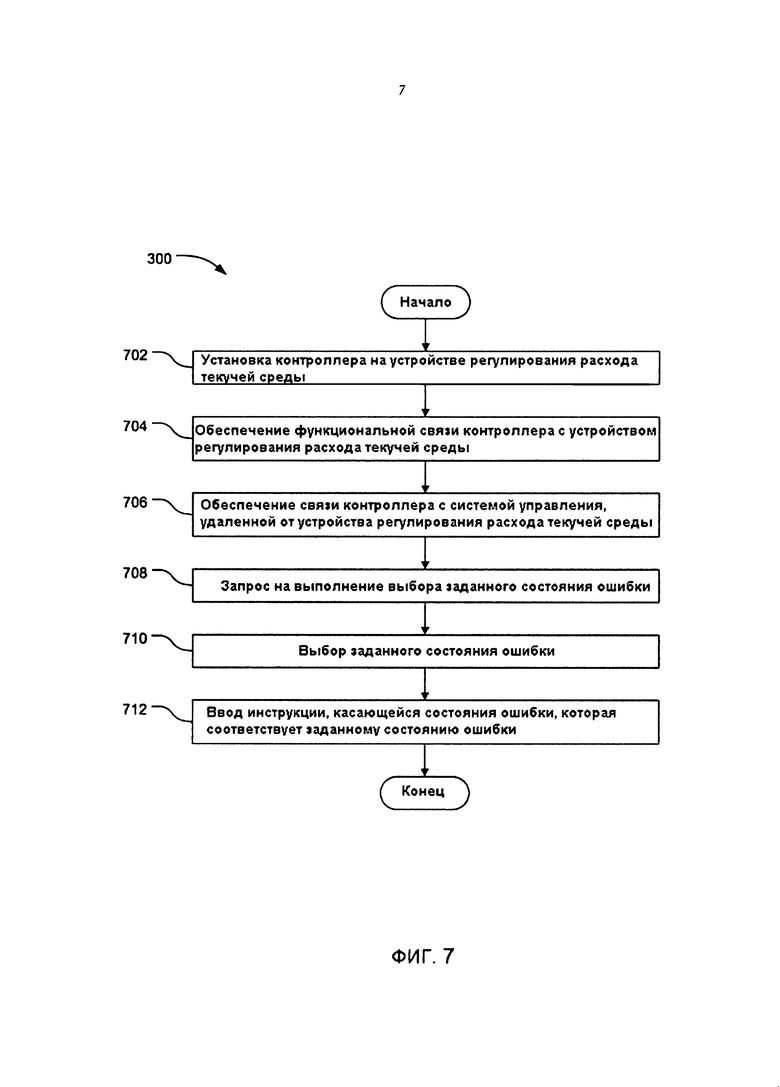
[0012] Фиг. 7 иллюстрирует структурную схему примера осуществления способа установки контроллера, указанного на фиг. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0013] Пример осуществления устройства и соответствующие способы, описанные в настоящем документе, обеспечивают периферийному устройству регулирования или другому периферийному устройству (например, клапану, насосу, выпускному устройству, жалюзи, конечному элементу регулирования и т.д.) или, в общем, конечному элементу регулирования возможность функционирования на основании параметра, касающегося заданного состояния ошибки, когда рабочие условия и (или) параметры отклоняются от значений, соответствующих функционированию в режиме отсутствия ошибки или отказа (например, в режиме нормального функционирования). Отклонение от значений, соответствующих режиму нормального функционирования, может воздействовать на функции периферийного устройства и (или) возможности управления периферийным устройством. В результате этого, при возникновении ошибки периферийное устройство может оставаться в последнем функциональном состоянии при условии, что рабочая текучая среда (например, воздух, гидравлическое масло и т.д.) подается на периферийное устройство в нормальном режиме.
[0014] Например, известное периферийное устройство (например, клапан) может быть связано с контроллером (например, регулятором положения клапана, приемопередатчиком, преобразователем и т.д.), имеющим интерфейс обмена данными, предназначенный для приема сигналов управления технологическим процессом от удаленной системы управления. В некоторых случаях, например, при прерывании подачи электроэнергии на систему управления обмен данными между системой управления и интерфейсом обмена данными контроллера прекращается. При отсутствии канала обмена данными контроллер не получает сигналы или инструкции управления периферийным устройством. Таким образом, в случае возникновения ошибки известные периферийные устройства обычно не переходят в безопасное состояние после обнаружения контроллером возникновения состояния ошибки (например, прерывания обмена данными между контроллером и системой управления).
[0015] В отличие от известных периферийных устройств, пример осуществления устройства и соответствующие способы, описанные в настоящем документе, обеспечивают возможность управления конечным элементом регулирования или периферийным устройством регулирования (например, узлом регулирования расхода), когда рабочие условия или параметры (например, состояние подключения к сети) отклоняются от режима нормального функционирования. Примеры осуществления периферийных устройств, конечных элементов регулирования и (или) устройств регулирования расхода могут охватывать, например, клапан для регулирования параметров или расхода текучей среды, насос, выпускное устройство, жалюзи, исполнительный механизм, такой как пневматический привод, гидравлический привод и (или) любое другое периферийное устройство (устройства) и (или) конечный элемент (элементы) регулирования. В отличие от известных контроллеров, в примерах осуществления контроллера и соответствующих способов, описанных в настоящем документе, используется местный процесс и (или) местные логические схемы управления, предназначенные для подачи инструкций или команд, касающихся заданного состояния ошибки, когда рабочий параметр и (или) состояние системы управления технологическим процессом и (или) периферийного устройства отклоняется от условий нормального функционирования.
[0016] Например, контроллер, описанный в настоящем документе, при обнаружении возникновения ошибки может обеспечить переход периферийного устройства в заданное положение, обусловленное состоянием ошибки. Условие (условия) и (или) инструкцию (инструкции) и (или) параметр (параметры), связанные с заданным состоянием ошибки, выбирает, определяет и (или) программирует пользователь, например, при помощи интерфейса ввода, предусмотренного в примере осуществления контроллера, описанном в настоящем документе. В некоторых вариантах пример осуществления контроллера, описанный в настоящем документе, подает пользователю запрос относительно выбора или использования одного или большего числа условий или параметров, связанных с заданным состоянием ошибки, которые могут быть определены, например, из таблицы или списка. В результате этого, контроллер, описанный в настоящем документе, обеспечивает реагирование на состояние ошибки даже, если система управления и (или) другое устройство регулирования системы управления технологическим процессом не имеет возможности обмена данными с указанным контроллером.
[0017] Определенное пользователем или предварительно заданное состояние ошибки может представлять собой прерывание обмена данными между удаленной системой управления (например, операторной или системой управления технологическим процессом) и контроллером, описанным в настоящем документе. Таким образом, местная система или логическая схема управления контроллера, описанного в настоящем документе, может осуществлять управление или обеспечивать функционирование периферийного устройства или узла регулирования расхода на основе параметра или инструкции, обусловленной заданным состоянием ошибки, которая записана в памяти или реализована схемными средствами контроллера. Например, параметр или инструкция, касающиеся состояния ошибки, которые описаны в настоящем документе, в случае обнаружения прекращения обмена данными могут предусматривать, например, переход периферийного устройства в открытое положение, закрытое положение, режим дросселирования или любое положение между полностью открытым и полностью закрытым положениями.
[0018] Определенное пользователем состояние ошибки, указанное в данном документе, может представлять собой превышение порогового значения температурой среды, в которой находится контроллер, описанный в настоящем документе. В некоторых примерах осуществления изобретения указанное в настоящем документе состояние ошибки возникает, когда значение параметра контроллера и (или) периферийного устройства выходит за пределы заданного диапазона калибровки. В других примерах осуществления изобретения описанное в настоящем документе состояние ошибки возникает, если измеренное положение периферийного устройства не соответствует положению, определенному командой, поданной на контроллер системой управления технологическим процессом.
[0019] В некоторых примерах осуществления изобретения параметр или инструкция, касающаяся заданного состояния ошибки, может предусматривать установку периферийного устройства (например, клапана) в промежуточное положение между первым или полностью открытым положением (например, величина хода составляет 100%) и вторым или полностью закрытым положением (например, величина хода составляет нуль процентов). В дополнительном или альтернативном варианте параметр или инструкция, касающаяся заданного состояния ошибки, может предусматривать установку периферийного устройства в первое положение в течение первого интервала или периода времени после обнаружения возникновения состояния ошибки и установку периферийного устройства во второе положение в течение второго интервала или периода времени по истечении первого интервала, если состояние ошибки сохраняется после окончания первого интервала. При этом первое положение может отличаться от второго положения.
[0020] В дополнительном или альтернативном варианте функционирование периферийного устройства может зависеть от функционирования и (или) положения рабочего элемента другого периферийного устройства системы управления технологическим процессом (например, при использовании взаимосвязанного процесса, каскадного процесса и т.д.). В таких случаях контроллер, описанный в настоящем документе, может внести задержку выполнения, игнорировать и (или) отменить сигнал управления (например, синхронизированный сигнал), поданный системой управления, если другое периферийное устройство не установлено в требуемое положение на момент получения контроллером сигнала управления. В дополнительном или альтернативном варианте контроллер может осуществлять передачу системе управления аварийного или сервисного сигнала с целью указания оператору того, что другое периферийное устройство не установлено в требуемое положение.
[0021] В дополнительном или альтернативном варианте пример осуществления контроллера, описанный в настоящем документе, может использоваться для определения или предоставления диагностической информации и аварийного сигнала (например, сервисного сигнала), когда, например, клапан не устанавливается в требуемое положение, остается в определенном положении в течение чрезмерно длительного времени, не проводится требуемое техническое обслуживание и т.д. В некоторых примерах осуществления изобретения контроллер, описанный в настоящем документе, может инициировать выполнение автоматической процедуры обслуживания (например, циклического функционирования периферийного устройства) на основании заданного пользователем графика (например, периодическое приведение клапана в действие для предотвращения залипания элемента регулирования расхода) и т.д.
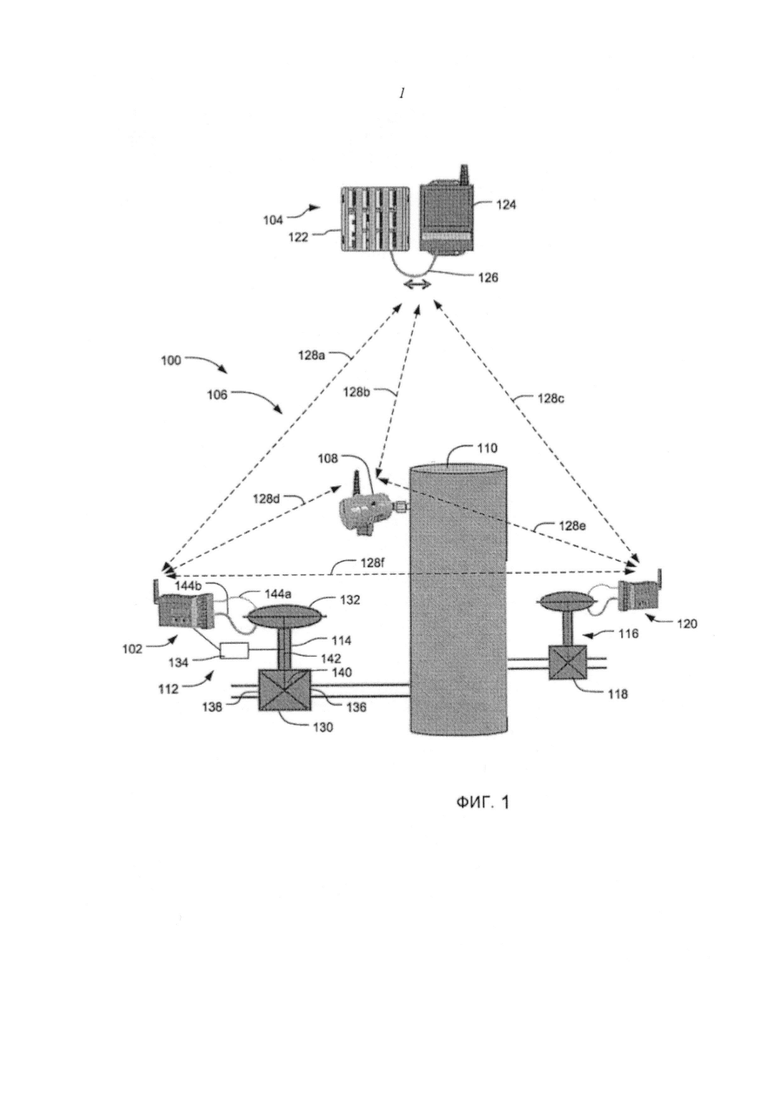
[0022] Фиг. 1 иллюстрирует пример осуществления системы 100 управления технологическим процессом, содержащей устройство регулирования или контроллер 102, описанный в настоящем документе, для которого предусмотрено одно или большее число состояний (состояния) или инструкций (инструкции), касающихся заданного состояния ошибки. Как указано на фиг.1, система 100 управления технологическим процессом связана с системой 104 управления (например, системой, размещенной в операторной) сетью 106 обмена данными. В общем, каналы, линии и пути обмена данными, которые обеспечивают контроллеру 102 возможность функционирования в системе 100 управления технологическим процессом, совместно называют сетью 106 обмена данными. В примере, представленном на фиг. 1, сеть 106 обмена данными представляет собой беспроводную сеть обмена данными. Хотя это не показано на фигуре, в других примерах осуществления изобретения сеть 106 обмена данными может представлять собой проводную систему обмена данными.
[0023] Пример осуществления системы 100 управления технологическим процессом, указанной на фиг. 1, содержит периферийное устройство или преобразователь 108 (например, беспроводный датчик или преобразователь), предназначенный для контроля или измерения параметра (например, давления, уровня жидкости и т.д.) технологической текучей среды (например, жидкости, газа и т.д.), находящейся в резервуаре или емкости 110 для текучей среды. Для контроля расхода текучей среды, откачиваемой из резервуара 110, в системе 100 управления технологическим процессом используется периферийное устройство 112, гидравлически связанное с резервуаром 110. Как указано на фиг. 1, периферийное устройство 112, представленное на фиг. 1, содержит устройство регулирования расхода или регулирующий клапан 114, для которого предусмотрен контроллер 102, предназначенный для управления функционированием устройства 114 регулирования расхода, подробно рассмотренного далее. Как указано на фиг. 1, система 100 управления технологическим процессом может содержать другое или второе периферийное устройство 116, предназначенное для регулирования расхода текучей среды, подаваемой в резервуар 110. Второе периферийное устройство 116 может содержать устройство регулирования расхода или регулирующий клапан 118 и другой или второй контроллер 120, описанный в настоящем документе, который предназначен для управления функционированием устройства 118 регулирования расхода.
[0024] Пример осуществления сети 106 обмена данными, указанный на фиг. 1, связан с беспроводными периферийными устройствами 108, 112 и 116 и системой 122 управления (например, компьютером, контроллером, системой сигнализации или другой системой) при помощи, по меньшей мере, одного беспроводного интерфейса 124 (например, шлюза). Например, система 122 управления может быть размещена в операторной, находящейся на определенном расстоянии от периферийных устройств 108, 112 и 116. Беспроводный интерфейс 124 связан с системой 122 управления при помощи соединительной линии 126, такой как линия сети Ethernet, линия сети Modbus Ethernet, линия сети последовательного обмена данными R485 и (или) других приемлемых сетей. Беспроводный интерфейс 124 может также поддерживать или использовать стандарты и протоколы обмена данными, такие как, например, протоколы локального интерфейса, последовательного обмена данными Modbus, удаленного интерфейса, Modbus TCP/IP, HART или любого другого приемлемого стандарта (стандартов) и (или) протокола (протоколов) обмена данными. Кроме того, беспроводный интерфейс 124 может использоваться в качестве узла сети обмена данными.
[0025] В некоторых примерах осуществления изобретения беспроводное периферийное устройство 112 может выполнять по беспроводной сети обмен данными с другими функционирующими беспроводными периферийными устройствами, такими как беспроводное периферийное устройство 108 или 116 и (или) один или большее число беспроводных интерфейсов, таких как беспроводный интерфейс 124. В частности, каждое беспроводное периферийное устройство 108, 112 и 116 может осуществлять обмен данными с использованием одного или большего числа беспроводных каналов, путей или линий 128а, 128b и 128c обмена данными. Таким образом, каждое беспроводное периферийное устройство 108, 112 и 116 может выполнять обмен данными с беспроводным интерфейсом 124 при помощи различных или дополнительных каналов 128а - 128f обмена данными.
[0026] Кроме того, периферийные устройства 108, 112 и (или) 116 могут быть размещены в узлах сотовой сети (например, сети, полностью или частично построенной на основе ячеистой топологии) и, таким образом, могут одновременно осуществлять обмен данными с другими функционирующими беспроводными периферийными устройствами и (или) беспроводными интерфейсами (например, другими шлюзами, маршрутизаторами или промежуточными усилителями), подключенными к системе 100 управления технологическим процессом. В некоторых примерах осуществления изобретения беспроводная сеть 106 обмена данными, содержащая сетевое аппаратное и программное обеспечение, предоставляет каналы сквозного или непосредственного обмена данными, которые определяются в процессе монтажа и настраиваются при последующем функционировании системы.
[0027] Пример осуществления устройства 114 регулирования расхода, представленного на фиг. 1, содержит клапан 130, пневматический привод 132 (например, диафрагму или поршневой привод) и преобразователь 134 положения. Преобразователь 134 положения может представлять собой, среди прочего, бесконтактный датчик, такой как, например, линейная матрица датчиков Холла, которые генерируют на выходе сигнал, имеющий различные значения (например, напряжения или тока) для различных положений указателя перемещения, связанного со штоком клапана 130 и (или) приводом 132. Другие примеры реализации датчиков положения могут охватывать конечные выключатели, контакты и потенциометрические датчики положения. Пример реализации клапана 130, указанного на фиг. 1, обеспечивает формирование проходного отверстия (например, образованного седлом клапана), предназначенного для прохождения текучей среды между входным патрубком 136 и выходным патрубком 138. Пример реализации привода 132, представленного на фиг. 1, функционально связан с элементом 140 регулирования расхода при помощи штока 142 клапана, который осуществляет перемещение элемента 140 регулирования расхода в первом направлении (например, от седла) с целью увеличения расхода текучей среды между входным патрубком 136 и выходным патрубком 138, и во втором направлении (например, к седлу) для ограничения расхода или прекращения подачи текучей среды между входным патрубком 136 и выходным патрубком 138 на основе давления, приложенного к чувствительному элементу привода 132 рабочей текучей средой (например, воздухом). В устройстве 114 регулирования расхода используется преобразователь 134 положения для определения или измерения положения элемента 140 регулирования расхода относительно седла клапана. Преобразователь 134 положения может осуществлять генерирование сигнала, указывающего положение клапана 130.
[0028] В других примерах осуществления изобретения контроллер 102 может использоваться для управления другими типами приводов, таких как, например, электрический привод, гидравлический привод и т.д. Например, при наличии функциональной связи с гидравлическим приводом электронные схемы контроллера 102 могут подавать сигналы управления на электрический исполнительный механизм и (или) могут подавать сигналы, представляющие давление гидравлической текучей среды в гидравлическом приводе.
[0029] В процессе функционирования периферийное устройство или преобразователь 108 контролирует уровень текучей среды в резервуаре 110 и генерирует сигнал, представляющий уровень текучей среды в резервуаре 110. Передатчик периферийного устройства 108 передает указанный сигнал на систему 122 управления и (или) периферийные устройства 112 и 116 по сети 106 обмена данными. Кроме того, периферийные устройства 112 и 116 могут обеспечивать передачу сигналов, генерированных контроллерами 102 и 120, которые указывают положение соответствующих периферийных устройств 112 и 116, на систему 122 управления при помощи сети 106 обмена данными и (или) с использованием сети 106 обмена данными могут также осуществлять прием от системы управления 122 командного сигнала. Например, на контроллер 102 может подаваться сигнал управления от системы 122 управления, обеспечивающий переход клапана 130 в закрытое положение с целью прекращения подачи текучей среды из резервуара 110.
[0030] При получении системой 122 управления от периферийного устройства 108 сигнала, указывающего, что уровень текучей среды в резервуаре 110 превышает требуемый уровень, система 122 управления передает контроллеру 102 сигнал управления с целью перевода клапана 130 в открытое положение для обеспечения отвода текучей среды из резервуара 110. Например, на контроллер 102 от системы 122 управления подается сигнал управления (например, сигнал управления в диапазоне 4 мА - 20 мА, в диапазоне 0-10 В постоянного тока, цифровой сигнал управления и т.д.), и контроллер 102 преобразует сигнал (сигналы) управления в соответствующее давление пневматической или гидравлической системы, которое воздействует на привод 132 через каналы 144а и (или) 144b с целью обеспечения перехода клапана 130 в открытое положение. В альтернативном варианте в соответствии с другими примерами осуществления изобретения контроллер 102 может осуществлять преобразование и (или) передачу одного или большего числа электрических сигналов на электрический привод с целью перевода клапана в открытое положение. Например, если программа управления технологическим процессом системы 122 управления определяет, что клапан 130 должен обеспечить прохождение большего объема и (или) повышение расхода технологической текучей среды, то при предположении использования токового сигнала управления амплитуда сигнала управления клапаном, который подается на контроллер, может быть увеличена с 4 мА до 8 мА.
[0031] Однако в процессе функционирования один или большее число рабочих параметров системы 100 управления технологическим процессом могут выйти за пределы штатного функционирования (например, пределы нормального функционирования). Выход за пределы условий нормального функционирования может оказать влияние на функциональные характеристики узла регулирования расхода и (или) возможности управления периферийным устройством 112. В результате этого, например, клапан 130 (например, положение элемента 140 регулирования расхода относительно седла клапана) может сохранять последнее положение, соответствующее моменту возникновения состояния ошибки (при условии, что текучая среда системы привода подается на узел регулирования расхода в нормальном режиме).
[0032] Например, отклонение от условий нормального функционирования может возникнуть в случае прерывания или приостановки обмена данными между системой 122 управления и периферийными устройствами 108, 112 и (или) 116. Например, может быть прервана подача питания на систему 122 управления или может быть заблокирован либо искажен сигнал управления (например, передаваемый по сквозному каналу обмена данными). Таким образом, система управления не обеспечит эффективный обмен данными с периферийными устройствами 108, 112 и (или) 116, в результате чего снижается точность и надежность функционирования системы 100 управления технологическим процессом. В некоторых примерах осуществления изобретения температура среды, в которой находится контроллер 102, может превысить рекомендуемую рабочую температуру. В определенных случаях диапазон калибровки или калиброванное значение контроллера 102 и (или) преобразователя 134 положения могут отклоняться от заданного диапазона калибровки или значения.
[0033] Как более подробно рассмотрено далее, для контроллера 102 предусмотрены условия или инструкции, касающиеся заданного состояния ошибки, которые обеспечивают контроллеру 102 возможность управления периферийным устройством 112 (например, клапаном 130), когда один или большее число рабочих параметров выходят за пределы нормального режима функционирования. Например, в памяти контроллера 102 могут содержаться инструкции, касающиеся заданных условий ошибки (например, команды), обеспечивающие контроллеру 102 возможность перемещения элемента 140 регулирования расхода клапана 130 в заданное положение на основе указанных инструкций в случае прерывания обмена данными между системой 122 управления и контроллером 102. В некоторых примерах осуществления изобретения при обнаружении состояния ошибки контроллер 102 осуществляет отмену сигнала управления, подаваемого системой 122 управления, и до момента устранения ошибки обеспечивает функционирование периферийного устройства 112 на основании инструкции (инструкций), касающейся заданного состояния ошибки.
[0034] В дополнительном или альтернативном варианте функционирование периферийного устройства 112 может определяться положением другого периферийного устройства системы 100 управления технологическим процессом, такого как второе периферийное устройство 116, указанное на фиг. 1. Более конкретно, контроллер 102, описанный в настоящем документе, может обеспечить прием сигнала состояния от контроллера 120 второго периферийного устройства 116, функционирование которого предшествует функционированию периферийного устройства 112. В этом случае контроллер 102 обеспечивает функционирование периферийного устройства 112 только, если второе периферийное устройство 116 находится в требуемом положении. В некоторых примерах осуществления изобретения контроллер 102 может выполнить отмену командного сигнала (например, синхронизированного сигнала), полученного от системы 122 управления, если второе периферийное устройство 116 не находится в требуемом положении.
[0035] Например, как представлено на фиг. 1, периферийное устройство 108 может осуществлять передачу системе 122 управления и (или) контроллерам 102 и 120 сигнала, указывающего, что уровень текучей среды в резервуаре 110 достиг требуемого значения. Процедура управления технологическим процессом системы 122 управления может предусматривать синхронный перевод клапанов 130 и 118 в закрытое положение, в результате чего на основе этих данных система 122 управления генерирует синхронизированный сигнал управления и передает указанный сигнал контроллерам 102 и 120 с целью перевода каждого клапана 130 и 118 в закрытое положение. Однако инструкция, касающаяся заданного состояния ошибки, может задержать перевод клапана 130 в закрытое положение контроллером 102, если контроллер 120 передает сигнал, указывающий, что клапан 118 не находится в закрытом положении. Таким образом, если на контроллер 102 от контроллера 120 подается сигнал, указывающий, что клапан 118 не находится в закрытом положении, то контроллер 102 не переводит клапан 130 в закрытое положение, несмотря на получение от системы 122 управления соответствующего сигнала управления, поскольку выполнение этой операции может привести к повышению уровня текучей среды в резервуаре 110.
[0036] В других примерах осуществления изобретения при возникновении состояния ошибки контроллер 102 может предусматривать переход клапана 130 в определенное или промежуточное положение. Например, конкретным положением клапана может быть положение между величиной хода нуль процентов и сто процентов. Например, контроллер 102 может обеспечить перемещение рабочего элемента клапана 130 в положение, соответствующее величине хода, равной 10% (то есть, открытое на 10% положение). В последующих примерах осуществления изобретения при возникновении состояния ошибки контроллер 102 обеспечивает переход клапана 130 в первое положение в течение первого интервала или периода времени и переход во второе положение в течение второго интервала или периода времени. Например, контроллер 102 может осуществить переход клапана 130 в открытое на 85% положение в течение первого часа после обнаружения ошибки или возникновения состояния ошибки, а затем может обеспечить переход клапана 130 в открытое на 15% положение по истечении первого часа после обнаружения ошибки или возникновения состояния ошибки. В других примерах осуществления изобретения при обнаружении состояния ошибки в контроллере 102 может быть реализована инструкция, касающаяся состояния ошибки, которая обеспечивает задержку изменения положения периферийного устройства 112 до истечения заданного интервала времени после обнаружения возникновения ошибки (например, одного часа с момента обнаружения ошибки).
[0037] Хотя в примере осуществления изобретения, указанном на фиг. 1, периферийное устройство 112 представлено клапаном 130, примеры осуществления устройства и способы определения параметра (параметров), касающегося состояния ошибки, описанные в настоящем документе, могут применяться к другим устройствам, в том числе, среди прочего, к конечному элементу регулирования, устройству регулирования расхода, насосу, выпускному устройству, жалюзи или другому устройству (устройствам). Хотя пример осуществления привода 132, указанный на фиг.1, предусматривает использование диафрагмы двустороннего действия или поршневого привода, в дополнительном или альтернативном варианте может применяться любой другой тип (типы) привода (приводов), такой как, например, поворотный привод, диафрагма одностороннего действия с пружинным возвратом или поршневой привод, электрический привод, гидравлический привод и т.д.
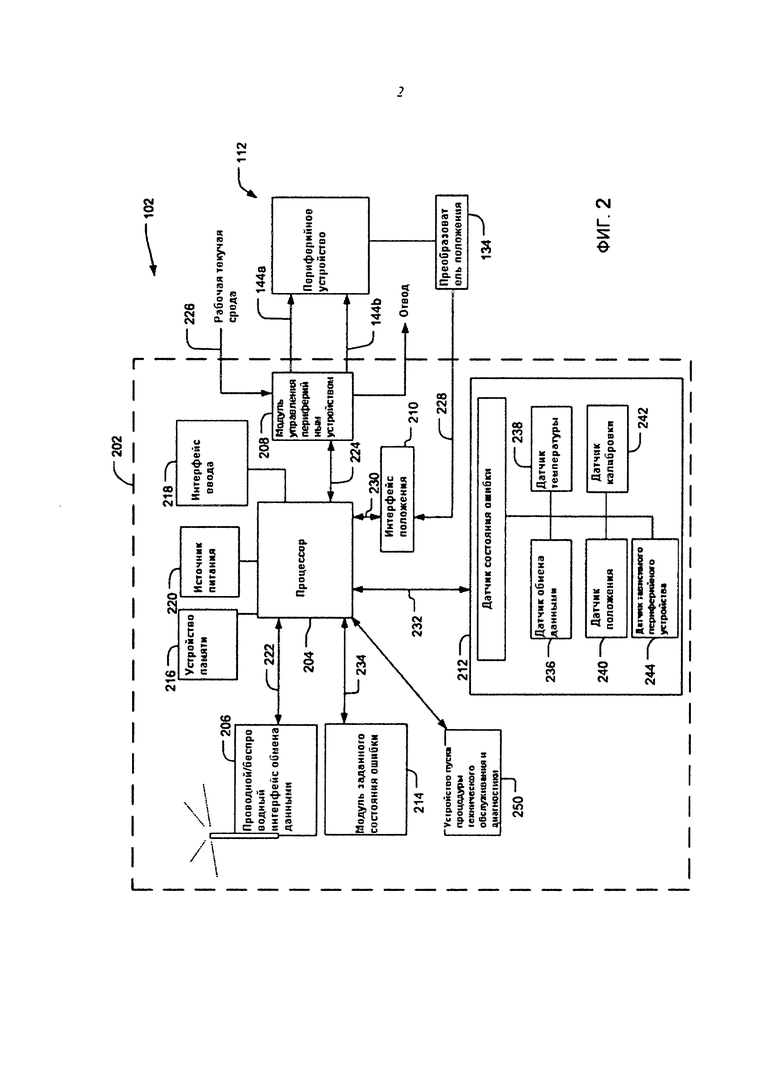
[0038] Фиг. 2 иллюстрирует структурную схему примера осуществления контроллера 102, указанного на фиг.1. В указанном примере контроллер 102 представляет собой электропневматический контроллер 102 положения клапана, установленный на периферийном устройстве или вблизи периферийного устройства, такого как, например, периферийное устройство 112, изображенное на фиг. 1. Пример осуществления контроллера 102 положения клапана, описанный в настоящем документе, может быть функционально связан с периферийным устройством 112 с целью обеспечения контроля положения клапана и управления периферийным устройством 112 при помощи пневматической системы с использованием беспроводной связи. Однако в других примерах осуществления изобретения контроллер 102 может представлять собой датчик положения, приемопередатчик, преобразователь и (или) любой другой регулятор, предназначенный для управления периферийным устройством, таким как, например, конечный элемент регулирования, электрический привод, гидравлический привод, насос, выпускное устройство, жалюзи и т.д.
[0039] Как указано на фиг. 1 и 2, контроллер 102 содержит корпус 202, в котором размещен процессор 204, интерфейс 206 обмена данными, модуль 208 управления периферийным устройством и (или) управления устройством регулирования параметров текучей среды, интерфейс 210 данных положения, датчик 212 состояния ошибки, модуль 214 заданного состояния ошибки, устройство 216 памяти, интерфейс 218 ввода данных и источник 220 питания. На источник 220 питания может подаваться переменный ток, постоянный ток или питание от сигнального контура. В дополнительном или альтернативном варианте источник 220 питания может представлять собой автономный модуль питания (например, комплект аккумуляторных батарей). Таким образом, контроллер 102 может являться автономным контроллером.
[0040] Для осуществления обмена данными (например, передачи и приема информации) с системой управления или другим периферийным устройством, таким как система 122 управления и (или) периферийные устройства 108 и 116, указанные на фиг. 1, в контроллере 102 предусмотрен интерфейс 206 обмена данными. Например, контроллер 102, описанный в настоящем документе, может передавать информацию (например, данные положения, полученные от преобразователя 134 положения периферийного устройства 112) системе управления (например, системе 122 управления, представленной на фиг. 1) для выполнения обработки. Система 122 управления обрабатывает данные положения (например, для определения необходимости перехода в открытое или закрытое положение) и при помощи интерфейса 206 обмена данными передает соответствующие команды процессору 204. Интерфейс 206 обмена данными с использованием канала или линии 222 передает инструкции процессору 204. Таким образом, контроллер 102 осуществляет сбор и передачу информации, а также получение информации и (или) команд от системы 122 управления или других периферийных устройств 108 и 116 при помощи интерфейса 206 обмена данными с целью непосредственного управления периферийным устройством 112.
[0041] Процессор 204 обрабатывает сигнал управления, полученный от интерфейса 206 обмена данными, и по каналу или линии 224 передает на модуль 208 управления периферийным устройством сигнал, определяющий давление пневматической системы, которое должно быть приложено рабочей текучей средой 226 (например, рабочей средой пневматической системы) к камерам привода 132. Например, процессор 204 и (или) модуль 208 управления периферийным устройством может выполнить преобразование (например, при помощи электропневматического преобразователя) команды или сигнала электронной схемы (например, напряжения, тока и т.д.), полученного интерфейсом 206 обмена данными, для генерирования сигнала, представляющего давление (например, сигнала, пропорционального давлению), который используется для управления периферийным устройством 112 в соответствии с командами, полученными интерфейсом 206 обмена данными (например, инструкциями, переданными системой 122 управления). На основании значений давления, поданных процессором 204, модуль 208 управления периферийным устройством определяет, требуется ли увеличить или уменьшить давление пневматической системы, приложенное к периферийному устройству 112 при помощи каналов 144а и 144b подачи текучей среды. Например, модуль 208 управления периферийным устройством может содержать клапан или устройство регулирования расхода, предназначенное для регулирования объема рабочей текучей среды 226, подаваемой по каналам 144а и 144b. В некоторых примерах осуществления изобретения модуль 208 управления периферийным устройством может содержать пневматический усилитель, предназначенный для повышения давления текучей среды. В других примерах осуществления изобретения, как указано выше, контроллер 102 может выполнять функции управления электрическим приводом или конечным элементом регулирования. В таком примере осуществления изобретения модуль 208 управления периферийным устройством подает электрический сигнал или инструкцию (инструкции) либо команду (команду) на устройство управления насосом, электрический привод, предназначенный для управления клапаном и (или) любой конечный элемент управления и (или) устройство (устройства) регулирования расхода.
[0042] В процессе функционирования периферийного устройства 112 (например, привода 132) интерфейс 210 данных положения контролирует положение периферийного устройства 112. Например, интерфейс 210 данных положения получает от преобразователя 134 положения сигнал 228 обратной связи, указывающий положение периферийного устройства 112 (например, элемента 140 регулирования расхода, указанного на фиг. 1), которое соответствует давлению, приложенному приводом 132 периферийного устройства 112, функционирующим на основе данных модуля 208 управления периферийным устройством. Интерфейс 210 данных положения по линии или каналу 230 передает информацию положения процессору 204. В свою очередь, процессор 204 выполняет обработку информации положения, и интерфейс 206 обмена данными передает указанную информацию положения в сеть обмена данными (например, сеть 106 обмена данными, указанную на фиг. 1).
[0043] Таким образом, когда система 100 управления технологическим процессом, представленная на фиг. 1, находится в штатном режиме или режиме нормального функционирования, процессор 204 выполняет обработку инструкций, полученных интерфейсом 206 обмена данными, с целью управления периферийным устройством 112 и (или) передачи информации о состоянии периферийного устройства 112 через интерфейс 206 обмена данными.
[0044] Для определения возникновения состояния ошибки в примере осуществления контроллера 102 используется датчик 212 состояния ошибки. Наличие состояния ошибки определяется, когда заданные технологические параметры периферийного устройства 112, контроллера 102 и (или) другие параметры или условия функционирования системы 100 управления технологическим процессом, указанной на фиг. 1, отклоняются от значений, соответствующих отсутствию ошибки. Например, когда датчик 212 состояния ошибки определяет возникновение состояния ошибки, то информация о возникновении состояния ошибки по каналу или линии 232 передается датчиком 212 состояния ошибки процессору 204. В таком случае процессор 204 не получает или не обрабатывает инструкции, поданные интерфейсом 206 обмена данными. Вместо приема или обработки инструкций, полученных от интерфейса 206 обмена данными, процессор 204 выполняет обработку и (или) получает инструкции, касающиеся управления или функционирования периферийного устройства 112, от альтернативного источника инструкций. В представленном примере в качестве альтернативного источника инструкций используется модуль 214 заданного состояния ошибки. Например, при обнаружении датчиком 212 состояния ошибки фактического возникновения ошибки модуль 214 заданного состояния ошибки по линии 234 подает процессору 204 инструкции, содержащие данные управления устройством. В дополнительном или альтернативном варианте в соответствии с некоторыми примерами осуществления изобретения процессор 204 для обеспечения управления или функционирования периферийных устройств 112 принимает или выполняет обработку инструкций частично поданных интерфейсом 206 обмена данными и частично поданных модулем 214 заданного состояния ошибки. В некоторых примерах осуществления изобретения при обнаружении первого состояния ошибки на процессор 204 подается первая инструкция или команда, касающаяся заданного состояния ошибки, и при обнаружении второго состояния ошибки подается вторая инструкция или команда, касающаяся заданного состояния ошибки.
[0045] Инструкция (инструкции) или команда (команды), касающаяся заданного состояния ошибки, может быть запрограммирована или определена пользователем. Например, пользователь определяет значение или предел технологического параметра, а датчик состояния ошибки индицирует возникновение состояния ошибки при превышении значения или предела технологического параметра либо отклонении от назначенного, выбранного и (или) заданного состояния параметра в режиме нормального функционирования.
[0046] Как указано на фиг. 2, пример осуществления датчика 212 состояния ошибки содержит датчик 236 обмена данными, датчик 238 температуры, датчик 240 положения, датчик 242 калибровки и датчик 244 зависимого периферийного устройства.
[0047] Датчик 236 обмена данными выполняет обнаружение сбоев обмена данными с сетью 106 обмена данными, системой 122 управления и (или) периферийными устройствами 108 и (или) 116. Например, если датчик 236 обмена данными обнаруживает, что прекращен обмен данными по линии или каналу 222 между интерфейсом 206 обмена данными и процессором 204, то датчик 236 обмена данными передает процессору 204 сигнал запроса на подачу модулем 214 заданного состояния ошибки инструкции, касающейся заданного состояния ошибки. В свою очередь, модуль 214 заданного состояния ошибки передает инструкцию или команду, касающуюся заданного состояния ошибки, которая соответствует обнаруженной ошибке обмена данными. Например, при обнаружении ошибки обмена данными датчиком 212 состояния ошибки заданная команда или инструкция может обеспечивать перевод процессором 204 периферийного устройства 112, например, в открытое положение, закрытое положение, положение дросселирования или любое другое положение между открытым и закрытым положением. В некоторых примерах другая инструкция, касающаяся заданного состояния ошибки, может обеспечивать приостановку процессором 204 функционирования устройства 112 регулирования параметров текучей среды в течение первого интервала времени (например, функционирование возобновляется через один час после обнаружения состояния ошибки). В некоторых примерах осуществления изобретения инструкция, касающаяся заданного состояния ошибки, может обеспечивать перевод процессором 204 периферийного устройства 112 в определенное положение (например, открытое положение) с целью выполнения отвода текучей среды из резервуара 110 в течение заданного интервала времени при отсутствии контроля фактического уровня текучей среды в резервуаре 110.
[0048] Датчик 238 температуры осуществляет измерение температуры среды, в которой находится контроллер 102. Например, преобразователь температуры контроллера 102 и (или) системы 100 управления технологическим процессом может подавать измеренное значение температуры на датчик 238 температуры. Датчик 238 температуры, например, при помощи компаратора выполняет сравнение измеренного значения температуры, поданного преобразователем температуры, и порогового значения температуры, которое, например, может сохраняться в устройстве 216 памяти. Как указано выше, пороговое значение температуры может быть предварительно задано или определено пользователем при помощи интерфейса 218 ввода данных. Если измеренное значение температуры превышает пороговое значение температуры, то датчик 238 температуры передает процессору 204 соответствующий сигнал. В свою очередь, модуль 214 заданного состояния ошибки передает процессору 204 инструкцию или команду, касающуюся заданного состояния ошибки, которая связана с превышением порогового значения температуры. Например, инструкция, касающаяся заданного состояния ошибки, может обеспечивать отключение питания процессора 204. В некоторых примерах осуществления изобретения инструкция, касающаяся заданного состояния ошибки, перед выключением питания может обеспечить перевод процессором 204 периферийного устройства в открытое положение или закрытое положение.
[0049] Датчик 240 положения определяет соответствие командного сигнала установки в требуемое положение, поданного процессору 204 интерфейсом 206 обмена данными и (или) модулем 214 заданного состояния ошибки, измеренному значению положения (например, сигналу 228 положения), которое передано на интерфейс 210 данных положения преобразователем 134 положения. Например, датчик 240 положения, при помощи компаратора может выполнить сравнение командного сигнала и измеренного значения положения для определения нахождения периферийного устройства 112 в требуемом положении. Если датчик 240 положения определяет, что измеренное значение положения не соответствует командному сигналу положения, то модуль 214 заданного состояния ошибки передает процессору 204 инструкцию или команду, касающуюся заданного состояния ошибки, которая обусловлена определением неправильного положения периферийного устройства 112. Например, модуль 214 заданного состояния ошибки может передать аварийный или сервисный сигнал в сеть 106 обмена данными через интерфейс 206 обмена данными. В дополнительном или альтернативном варианте пример осуществления инструкции, касающейся заданного состояния ошибки, может обеспечить выполнение процессором 204 стандартной процедуры технического обслуживания, предусматривающей периодическое или быстрое циклическое перемещение рабочего элемента периферийного устройства 112 с целью устранения возможного залипания рабочего элемента, которое обусловило неправильное положение клапана.
[0050] Датчик 242 калибровки можно использовать для определения возможного отклонения калиброванных значений контроллера 102 и преобразователя 134 положения от заданного диапазона калибровки или значения. Если датчик 242 калибровки обнаруживает отклонение от заданного диапазона калибровки или значения, то модуль 214 заданного состояния ошибки передает процессору 204 инструкцию или команду, касающуюся заданного состояния ошибки, которая обусловлена отклонением от заданного калиброванного значения или диапазона калибровки. Например, модуль 214 заданного состояния ошибки может обеспечить выполнение процессором 204 процедуры автоматической калибровки и (или) подачи сервисного сигнала.
[0051] Датчик 244 зависимого периферийного устройства осуществляет определение, зависит ли функционирование периферийного устройства 112 от функционирования или операций другого периферийного устройства (например, второго периферийного устройства 116, указанного на фиг. 1) системы 100 управления технологическим процессом. Например, в некоторых примерах осуществления изобретения может быть необходимым, чтобы функционирование второго периферийного устройства 116 предшествовало и (или) координировалось с функционированием периферийного устройства 112. Если датчик 244 зависимого периферийного устройства определяет, что функционирование периферийного устройства 112 зависит от предварительного (или одновременного) функционирования второго периферийного устройства 116, то датчик 212 состояния ошибки передает определенный сигнал процессору 204 и (или) модулю 214 заданного состояния ошибки. В свою очередь, модуль 214 заданного состояния ошибки передает процессору 204 инструкцию или команду, касающуюся заданного состояния ошибки, которая связана с обнаружением зависимости функционирования периферийного устройства 112 от функционирования второго периферийного устройства 116. Например, в процессе проведения технического обслуживания система 122 управления может передать контроллерам 102 и 120 сигнал, обеспечивающий переход соответствующих периферийных устройств 112 и 116 в закрытое положение (например, одновременно). Однако, если контроллер 120 второго периферийного устройства 116 передает сигнал, указывающий, что периферийное устройство 116 не находится в закрытом положении, то датчик 244 зависимого периферийного устройства подает соответствующий сигнал процессору 204 и датчик 244 зависимого периферийного устройства определяет, что возникло состояние ошибки. В свою очередь, инструкция, касающаяся заданного состояния ошибки, может обеспечить задержку, игнорирование или замену процессором 204 командного сигнала системы 122 управления до определения датчиком 244 зависимого периферийного устройства, что периферийное устройство 116 находится в требуемом положении.
[0052] Как указано выше, в представленном примере состояние ошибки и (или) инструкция или команда, касающаяся заданного состояния ошибки, могут определяться или программироваться пользователем. В некоторых примерах осуществления изобретения инструкции или команды, касающиеся заданного состояния ошибки, могут обеспечить переход периферийного устройства, такого как, например, периферийное устройство 112 в полностью открытое положение, полностью закрытое положение, положение дросселирования и (или) любое другое положение между полностью открытым и полностью закрытым положением, например, открытое на 10% положение, открытое на 80% положение и т.д.
[0053] В некоторых примерах инструкция, касающаяся заданного состояния ошибки, может обеспечивать изменение процессором 204 производительности или положения периферийного устройства 112 (например, переход из закрытого положения в открытое положение) на определенный интервал времени (например, в течение 15 минут, 5 часов и т.д.), а затем возврат к предшествующему состоянию производительности или положению (например, переход в закрытое положение).
[0054] В других примерах осуществления изобретения инструкции, касающиеся заданного состояния ошибки, могут обеспечить сохранение процессором 204 последнего фактического положения периферийного устройства 112 при обнаружении состояния ошибки датчиком 212 состояния ошибки (например, последнего фактического состояния перед возникновением ошибки). В таких примерах указанное последнее состояние перед возникновением ошибки может быть обеспечено без какого-либо воздействия пневматической системы. Например, процессор 204 может подать на модуль 208 управления периферийным устройством инструкцию, предусматривающую сохранение имеющегося объема рабочей текучей среды в камерах привода 132, в результате чего модуль 208 управления периферийным устройством не осуществляет отвод рабочей текучей среды, находящейся в приводе 132, через выпускное устройство 246.
[0055] В некоторых примерах осуществления изобретения инструкции, касающиеся заданного состояния ошибки, могут обеспечивать перевод процессором 204 периферийного устройства 112 в любое заданное положение (например, положение, соответствующее заданному состоянию ошибки) с использованием пневматической системы или без использования указанной системы либо при помощи модуля 208 управления периферийным устройством и (или) рабочей текучей среды 226. Например, для установки периферийного устройства 112 в требуемое положение без использования пневматической системы процессор 204 может подать на модуль 208 управления периферийным устройством инструкции, касающиеся сброса давления, по меньшей мере, одной камеры привода 132 через устройство 246 отвода с целью перевода периферийного устройства 112 в положение, соответствующее заданному состоянию ошибки. Например, если периферийное устройство содержит подпружиненный привод одностороннего действия, то отвод рабочей текучей среды из рабочей камеры привода обеспечит перемещение элемента регулирования расхода клапана под воздействием пружины в полностью открытое положение или полностью закрытое положение без использования рабочей текучей среды 226.
[0056] В дополнительном или альтернативном варианте инструкция, касающаяся заданного состояния ошибки, может обеспечивать переход периферийного устройства 112 в первое положение в течение первого интервала времени после обнаружения возникновения состояния ошибки датчиком 212 состояния ошибки и может обеспечить переход периферийного устройства 112 во второе положение в течение второго интервала времени после завершения первого интервала времени, если датчик 212 состояния ошибки обнаруживает, что состояние ошибки не устранено по истечении первого интервала времени.
[0057] Состояние (состояния) ошибки и (или) инструкция, касающаяся состояния ошибки, может программироваться с использованием интерфейса 218 ввода. Интерфейс 218 ввода может представлять собой дисплей (например, жидкокристаллический дисплей, сенсорный экран и т.д.), имеющий модуль ввода (например, клавиатура, кнопки и т.д.), который предназначен для ввода информации, например, пользователем или оператором. Кроме того, интерфейс 218 ввода может содержать средство отмены (например, кнопку) для обеспечения оператору или пользователю возможности отмены команд или инструкций, поданных интерфейсом 206 обмена данными и (или) модулем 214 заданного состояния ошибки. В таком случае инструкции или команды могут подаваться на процессор 204 через интерфейс 218 ввода.
[0058] Представленный пример осуществления контроллера 102 также содержит устройство 216 памяти, предназначенное для хранения команд и инструкций, касающихся заданного состояния ошибки. Например, если датчик 212 состояния ошибки обнаруживает возникновение состояния ошибки, то модуль 214 заданного состояния ошибки может извлечь из устройства 216 памяти одну или большее число инструкций, касающихся заданного состояния ошибки, которые соответствуют обнаруженному состоянию ошибки.
[0059] В дополнительном или альтернативном варианте пример осуществления контроллера 102 может предусматривать использование процедуры технического обслуживания и (или) диагностики. Устройство 250 пуска процедуры технического обслуживания и диагностики осуществляет пуск процедуры, которая может предусматривать, например, подачу предупредительного, аварийного или информационного сигнала. В некоторых примерах осуществления изобретения устройство 250 пуска процедуры технического обслуживания и диагностики выполняет обмен данными (например, инструкциями или командами) с процессором 204, если устройством 250 пуска процедуры технического обслуживания и диагностики обнаружено, что периферийное устройство 112 не было переведено в положение, соответствующее поданной команде, оставалось в определенном положении в течение сравнительно длительного интервала времени, техническое обслуживание не проведено согласно графику или выполнено с задержкой и т.д. В некоторых случаях с целью предотвращения залипания периферийного устройства 112 вследствие продолжительного неподвижного состояния рабочего элемента устройство 250 пуска процедуры технического обслуживания и диагностики может периодически приводить в действие периферийное устройство 112 (например, с использованием инструкций циклического функционирования периферийного устройства 112). Процедура технического обслуживания и диагностики может быть автоматически инициирована на любую требуемую дату, в любое время, с любым интервалом (например, периодическое выполнение) и т.д. Например, график автоматического технического обслуживания может быть введен в память контроллера 102 при помощи интерфейса 218 ввода.
[0060] Хотя на фиг. 2 представлен пример осуществления контроллера 102, изображенного на фиг. 1 и 2, один или большее число элементов, процессов и (или) устройств, указанных на фиг.2, могут быть объединены, разделены, преобразованы, изъяты, исключены и (или) реализованы другим способом. Далее пример осуществления модуля 214 заданного состояния ошибки, датчика 212 состояния ошибки и (или), в общем, пример осуществления контроллера 102, указанного на фиг. 1 и 2, может быть реализован на основе аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения и (или) любой комбинации аппаратного обеспечения, программного обеспечения и (или) встроенного программного обеспечения. Таким образом, например, любой пример осуществления модуля 214 заданного состояния ошибки, датчика 212 состояния ошибки и (или), в общем, пример осуществления контроллера 120, указанного на фиг. 1 и 2, может быть реализован на основе одной или большего числа схем, программируемого процессора (процессоров), специализированной интегральной схемы (схем) (ASIC), программируемого логического устройства (устройств) и (или) программируемого пользователем логического устройства (устройств) (FPGA) и т.д. Пример осуществления контроллера 102 может содержать один или большее число элементов, процессов и (или) устройств, дополняющих или заменяющих компоненты, указанные на фиг. 2, и (или) может содержать любой из представленных элементов, процессов или устройств либо все указанные компоненты.
[0061] Фиг. 3-5 иллюстрируют структурные схемы примеров осуществления способов, используемых для управления, обеспечения функционирования и (или) реализации иным способом функций контроллера 102, представленного на фиг. 1 и 2. Хотя на фиг. 3-5 представлены примеры осуществления способов 300, 400 и 500, одна или большее число операций, указанных на фиг. 3-5, могут быть объединены, разделены, преобразованы, изъяты, исключены и (или) реализованы другим способом. Кроме того, примеры осуществления способов, указанных на фиг. 3-5, могут включать одну или большее число операций, дополняющих или заменяющих операции, представленные на фиг. 3-5, и (или) могут охватывать более одной операции или все указанные операции. Далее, хотя пример осуществления способа описан со ссылкой на структурные схемы, изображенные на фиг. 3-5, в альтернативном варианте могут быть использованы другие способы обнаружения состояния ошибки системы управления технологическим процессом.
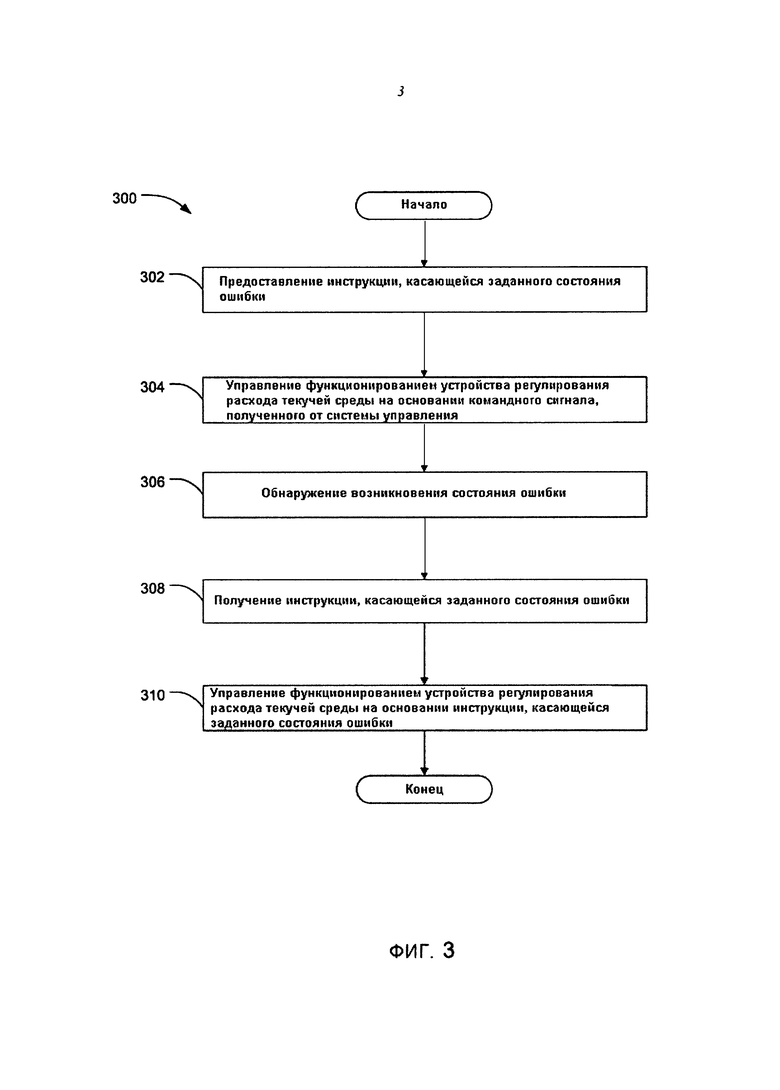
[0062] Фиг. 3 иллюстрирует структурную схему примера осуществления способа, который может использоваться для реализации функций контроллера 102, указанного на фиг. 1 и 2.
[0063] Как указано на фиг. 3, в контроллере 102 предусматривается инструкция, касающаяся заданного состояния ошибки, которая соответствует обнаруженному состоянию ошибки (этап 302). Например, инструкция, касающаяся заданного состояния ошибки, и (или) соответствующее состояние ошибки могут быть программируемыми. Например, инструкция, касающаяся заданного состояния ошибки, может быть предварительно задана (например, на предприятии-изготовителе) в контроллере 102 и (или) может быть записана в памяти контроллера 102 после установки контроллера 102 в периферийном устройстве 112 (например, на месте эксплуатации). В некоторых примерах осуществления изобретения инструкция, касающаяся заданного состояния ошибки, и (или) соответствующее состояние ошибки могут быть представлены инструкциями или командами, запрограммированными пользователем, которые введены в контроллер 102 при помощи интерфейса 218 ввода, как указано выше.
[0064] В процессе функционирования контроллер 102 обеспечивает управление периферийным устройством на основе командного сигнала, полученного от системы управления (этап 304). Например, если контроллер 102 не обнаруживает возникновения ошибки, то процессор 204 осуществляет управление периферийным устройством 112 на основании сигнала управления или инструкции, поданной системой 122 управления через интерфейс 206 обмена данными.
[0065] Кроме того, в процессе функционирования контроллер 102 и (или) датчик 212 состояния ошибки определяет возникновение состояния ошибки (этап 306). Например, датчик 212 состояния ошибки может контролировать один или большее число параметров или переменных системы управления технологическим процессом, связанных с состоянием ошибки, записанным в памяти контроллера 102. Например, датчик 212 состояния ошибки контролирует обмен данными с использованием датчика 236 обмена данными, температуру при помощи датчика 238 температуры, положение периферийного устройства с использованием датчика 240 положения, калибровку при помощи датчика 242 калибровки и (или) взаимосвязь или каскадное выполнение процесса при помощи датчика 244 зависимого периферийного устройства.
[0066] В случае обнаружения состояния ошибки, например, датчиком 212 состояния ошибки контроллер 102 получает от другого устройства или извлекает из памяти инструкцию, касающуюся заданного состояния ошибки, которая соответствует обнаруженному состоянию ошибки (этап 308). Например, процессор 204 может извлечь из памяти или получить инструкцию, касающуюся заданного состояния ошибки, от модуля 214 заданного состояния ошибки.
[0067] Контроллер 102 обеспечивает функционирование или управление периферийным устройством 112 на основании инструкции, касающейся заданного состояния ошибки (этап 310). Например, процессору 204 может быть передана инструкция, касающаяся заданного состояния ошибки, которая предусматривает переход периферийного устройства 112 в закрытое положение в случае обнаружения ошибки обмена данными датчиком 236 обмена данными. Процессор 204 может передать на модуль 208 управления периферийным устройством команду, предусматривающую подачу рабочей текучей среды 226 в верхнюю камеру привода 132 с целью перемещения элемента 140 регулирования расхода в направлении седла клапана для ограничения или прекращения прохождения текучей среды через клапан 130. В других примерах осуществления изобретения инструкции, касающиеся заданного состояния ошибки, могут предусматривать управление или соответствующее функционирование конечного элемента регулирования, такого как, например, электрический привод, насос, выпускное устройство и (или) любое другое используемое периферийное устройство (устройства) или конечное устройство (устройства) регулирования. В некоторых примерах осуществления изобретения инструкции, касающиеся заданного состояния ошибки, могут представлять собой сигналы, предусматривающие приложение высокого давления к клапанам или конечным элементам регулирования с гидравлическим приводом.
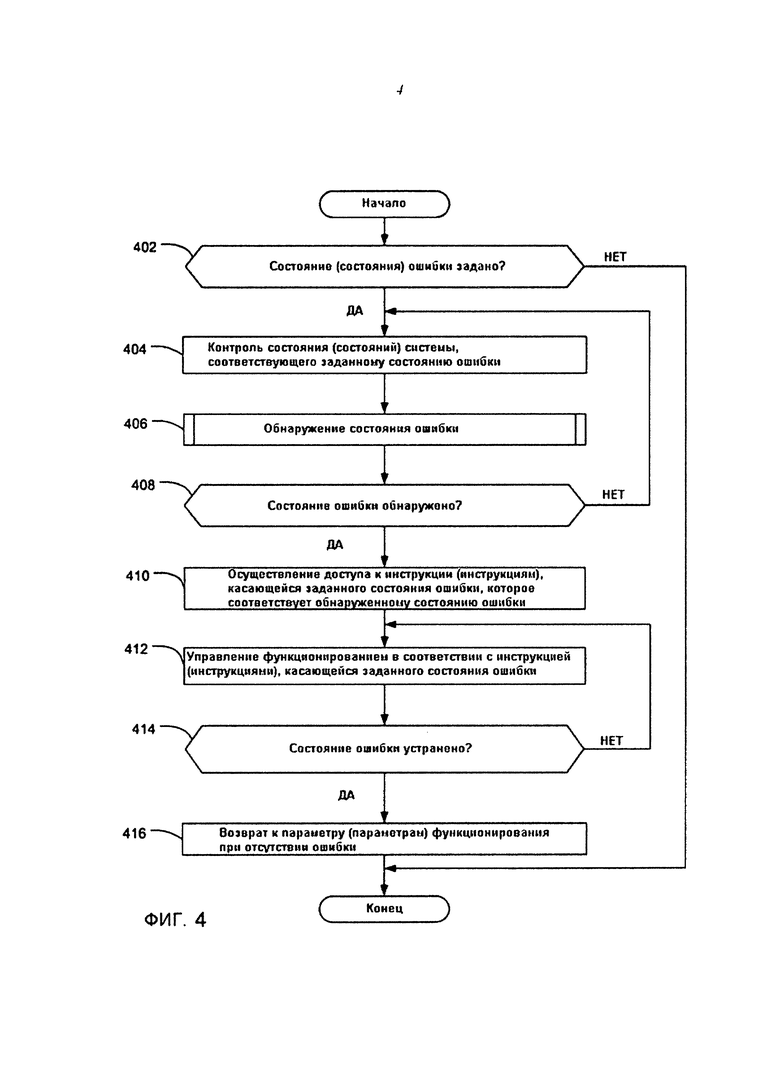
[0068] Фиг. 4 иллюстрирует пример осуществления процесса управления с использованием контроллера 102, указанного на фиг. 1 и 2.
[0069] Для обнаружения возникновения состояния ошибки процессор 204 и (или) датчик 212 состояния ошибки определяет, записано ли в памяти или определено иным способом в контроллере 102 (этап 402) состояние ошибки и (или) инструкция, касающаяся заданного состояния ошибки. Например, процессор 204 и (или) датчик 212 состояния ошибки могут определить, записано ли заданное состояние ошибки в устройстве 216 памяти контроллера 102. Если заданное состояние ошибки не было предусмотрено или определено, то выполнение процесса 400 завершается.
[0070] Если процессор 204 и (или) датчик 212 состояния ошибки определяют, что на этапе 402 предоставлена информация заданного состояния ошибки, то процессор 204 и (или) датчик 212 состояния ошибки осуществляют контроль одного или большего числа системных состояний и (или) параметров системы 100 управления технологическим процессом, указанной на фиг. 1, соответствующих заданному состоянию ошибки, записанному в памяти контроллера 102 (этап 404). Как указано выше, примеры такого состояния и (или) параметра охватывают, среди прочего, сетевой обмен данными, значение температуры, параметры калибровки, значение положения, координированное функционирование множества периферийных устройств и (или) любые другие состояния и (или) параметры системы управления технологическим процессом, которые могут контролироваться.
[0071] Далее процессор 204 и (или) датчик 212 состояния ошибки выполняет или осуществляет процесс обнаружения состояния ошибки с целью выявления возникновения ошибки (этап 406). Например, процессор 204 и (или) датчик 212 состояния ошибки может определить наличие состояния ошибки на основании данных контролируемых системных состояний и (или) параметров, полученных на этапе 404. Пример осуществления процесса 500 обнаружения состояния ошибки, который может использоваться для реализации этапа 406, описан при рассмотрении фиг. 5.
[0072] Если процессор 204 и (или) датчик состояния ошибки на этапе 406 определяет, что состояние ошибки не возникло, то процесс 400 возвращается к этапу 404 (этап 408). Например, если на этапе 406 наличие состояния ошибки не выявлено, то процессор 204 продолжает осуществление управления или функционирования периферийного устройства 112 на основании инструкций, полученных через интерфейс 206 обмена данными. Если датчик 212 состояния ошибки обнаруживает наличие состояния ошибки, то датчик 212 состояния ошибки подает процессору 204 сигнал, указывающий возникновение состояния ошибки (этап 408).
[0073] Процессор 204 и (или) датчик 212 состояния ошибки осуществляет доступ, получает или принимает инструкции, касающиеся состояния ошибки, которые соответствуют обнаруженному состоянию ошибки (этап 410). Например, модуль 214 заданного состояния ошибки может получить из устройства 216 памяти инструкции, касающиеся заданного состояния ошибки, которые соответствуют конкретному состоянию ошибки, обнаруженному на этапе 406, и (или) может передать или предоставить процессору 204 инструкцию (инструкции), касающуюся заданного состояния ошибки. Далее процессор 204 обеспечивает функционирование периферийного устройства 112 в соответствии с инструкцией (инструкциями), касающейся заданного состояния ошибки, которая соответствует состоянию ошибки, выявленному на этапе 404 (этап 412).
[0074] Далее процессор 204 определяет, устранено ли обнаруженное состояние ошибки (этап 414). Если на этапе 414 установлено, что обнаруженное состояние ошибки не устранено, то процессор 204 обеспечивает продолжение функционирования периферийного устройства 112 в соответствии с инструкциями, касающимися заданного состояния ошибки, которые получены на этапе 412. Если обнаруженное состояние ошибки устранено, то контроллер 102 возвращается к параметрам функционирования при отсутствии ошибки (этап 416). Когда контроллер 102 возвращается в режим функционирования при отсутствии ошибки, процессор 204 осуществляет управление периферийным устройством 112 с использованием инструкций, полученных интерфейсом 204 обмена данными (например, инструкций, предоставленных системой 122 управления).
[0075] Фиг. 5 иллюстрирует структурную схему примера осуществления процесса обнаружения состояния ошибки, который может быть использован для реализации этапа 406, указанного на фиг.4.
[0076] Для обнаружения состояния ошибки датчик 212 состояния ошибки анализирует или обрабатывает данные контролируемых системных состояний и (или) параметров, полученные на этапе 404, представленном на фиг. 4 (этап 502). Например, датчик 212 состояния ошибки может осуществлять анализ, измерение и (или) обработку контролируемых системных состояний и (или) параметров, соответствующих каждому заданному состоянию ошибки, предусмотренному в контроллере 102.
[0077] Далее датчик 212 состояния ошибки определяет, отклоняются ли значения контролируемых системных состояний и (или) параметров от состояния при отсутствии ошибки (этап 504). Если контролируемое системное состояние (состояния) или параметр (параметры) не отклоняется от состояния при отсутствии ошибки, полученного на этапе 504, то датчик 212 состояния ошибки определяет, что состояние ошибки не обнаружено (этап 506). После этого, процесс 500 возвращается к этапу 406, указанному на фиг. 4.
[0078] Если установлено, что контролируемое системное состояние (состояния) или параметр (параметры) на этапе 504 отклоняются от состояния при отсутствии ошибки, то датчик 212 состояния ошибки определяет, что обнаружено состояние ошибки (этап 508). Далее процесс 500 возвращается к этапу 406, указанному на фиг. 4.
[0079] Фиг. 6 иллюстрирует структурную схему примера осуществления процессорной системы, которая может использоваться для реализации способа и устройства, описанных в настоящем документе. Процессорная система 610, представленная на фиг. 6, содержит процессор 612, связанный с соединительной шиной 614. Процессор 612 может представлять собой любой приемлемый процессор, процессорный модуль или микропроцессор (например, один или большее число микропроцессоров Intel® семейства Pentium®, семейства Itanium® или семейства XScale®, встроенные процессоры Texas Instruments® и (или) прочие устройства, представляющие другие семейства процессоров). Система 610 может представлять собой мультипроцессорную систему и, таким образом, может включать в себя один или большее число дополнительных процессоров, идентичных или подобных процессору 612, которые подключены к соединительной шине 614 для обеспечения возможности обмена данными.
[0080] Процессор 612, указанный на фиг. 6, связан с набором 618 микросхем, который включает в себя контроллер 620 памяти и контроллер 622 ввода-вывода. Набор микросхем обеспечивает выполнение функций управления вводом-выводом и памятью, а также содержит множество универсальных и (или) специализированных регистров, таймеров и других элементов, к которым осуществляется доступ или которые используются одним или большим числом процессоров, связанных с набором 618 микросхем. Контроллер 620 памяти выполняет функции, обеспечивающие процессору 612 возможность доступа к системной памяти 624, массовой памяти 625 и (или) универсальному цифровому диску (DVD) 640.
[0081] В общем, системная память 624 может включать в себя любую требуемую энергозависимую и (или) энергонезависимую память (ЭНП), такую как, например, статическое оперативное запоминающее устройство (СОЗУ), динамическое оперативное запоминающее устройство (ДОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ) и т.д. Массовая память 625 может включать в себя любое требуемое устройство массовой памяти, в том числе жесткие диски, оптические диски, накопители на магнитной ленте и т.д. Машиночитаемые инструкции, указанные при рассмотрении фиг. 4 и 5, могут быть записаны в системной памяти 624, массовой памяти 625 и (или) на универсальном цифровом диске 640.
[0082] Контроллер 622 ввода-вывода выполняет функции, обеспечивающие процессору 612 возможность обмена данными с периферийными устройствами 626 и 628 ввода-вывода и сетевым интерфейсом 630 при помощи шины 632. Устройства 626 и 628 ввода-вывода могут представлять собой устройства ввода-ввода любого типа, такие как, например, клавиатура, кнопки, видеотерминал или другой местный пользовательский дисплей или монитор, мышь и т.д. Сетевой интерфейс 630 может, например, представлять собой устройство сети Ethernet, устройство, работающее в асинхронном режиме передачи (ATM), устройство, соответствующее стандарту 802.11, модем DSL, кабельный модем, модем сотовой связи, систему управления технологическим процессом с использованием протокола HART, систему обмена данными на основе стандарта Fieldbus, например, Foundation Fieldbus и Profibus, а также прочие системы, которые обеспечивают процессорной системе 610 возможность обмена данными с другой процессорной системой. Пример осуществления сетевого интерфейса 630, указанный на фиг. 6, связан каналом обмена данными с сетью 634, такой как интрасеть, локальная сеть, глобальная сеть, сеть Интернет и т.д.
[0083] Хотя контроллер 620 памяти и контроллер 622 ввода-вывода представлены на фиг. 6 в виде отдельных функциональных компонентов набора 618 микросхем, функции, выполняемые этими компонентами, могут быть реализованы на основе одной полупроводниковой схемы или двух либо большего числа отдельных интегральных схем.
[0084] Фиг. 7 иллюстрирует структурную схему примера осуществления способа установки контроллера 102, указанного на фиг. 1. Установка контроллера 102 предусматривает монтаж контроллера на периферийном устройстве (например, приводе 132 периферийного устройства 112) и (или) размещение вблизи от периферийного устройства при помощи крепления или кронштейна (этап 702). Затем контроллер 102 функционально связывают с периферийным устройством 112 (этап 704). Например, каналы 144а и 144b обеспечивают связь с модулем 208 управления периферийным устройством и приводом 132. Кроме того, контроллер 102 функционально связан и (или) его структура построена с учетом обеспечения обмена данными с системой 122 управления и (или) периферийными устройствами (например, периферийными устройствами 108 и 118) при помощи сети 106 обмена данными (этап 706).
[0085] В некоторых примерах осуществления изобретения контроллер подает запрос на выбор заданных состояний ошибки (этап 708). Например, заданные состояния ошибки могут быть получены из раскрывающегося меню, которое представляется пользователю или техническому специалисту через интерфейс ввода, и (или) заданные состояния ошибки могут быть запрограммированы в контроллере 102 с использованием, например, компьютера.
[0086] Затем выполняется предоставление или определение заданных состояний ошибки (этап 710). В некоторых примерах осуществления изобретения состояния ошибки могут быть заданы на предприятии-изготовителе и (или) могут быть определены на месте установки. После предоставления или определения состояний ошибки выполняется передача или определение инструкций, касающихся заданных состояний ошибки, соответствующих каждому из предоставленных или определенных заданных состояний ошибки (этап 712). Как указано выше, указанные инструкции, касающиеся заданного состояния ошибки, могут быть запрограммированы, определены пользователем и (или) предусмотрены в соответствии с требованиями пользователя.
[0087] Хотя в данном документе описаны конкретные примеры осуществления способа и устройства, объем настоящего изобретения не ограничивается указанными примерами. Напротив, объем изобретения охватывает все способы, устройства и изделия, определенные приложенной формулой изобретения, которые указаны фактически или соответствуют принципам эквивалентности.
Для управления периферийным устройством (108, 112, 116) регулирования осуществляют прием через контроллер (102), связанный с периферийным устройством (108, 112, 116) регулирования, данных от системы (122) управления, удаленной от контроллера (102), с целью обеспечения функционирования периферийного устройства (108, 112, 116) регулирования в условиях отсутствия ошибки; обнаружение (306) возникновения состояния ошибки и обеспечение функционирования (506) периферийного устройства (108, 112, 116) регулирования на основании данных, поступающих от системы (122) управления, если возникновение состояния ошибки не обнаружено. Кроме того, обеспечивают функционирование (508) периферийного устройства (108, 112, 116) регулирования при обнаружении возникновения состояния ошибки на основании инструкции, касающейся заданного состояния ошибки, которая записана в памяти контроллера (102), и заключающейся в обеспечении функционирования периферийного устройства регулирования в первом положении в течение первого интервала времени и во втором положении в течение второго интервала времени. Обеспечивается возможность поддержания заданного уровня текучей среды в резервуаре даже при возникновении состояния ошибки. 3 н. и 23 з.п. ф-лы, 7 ил.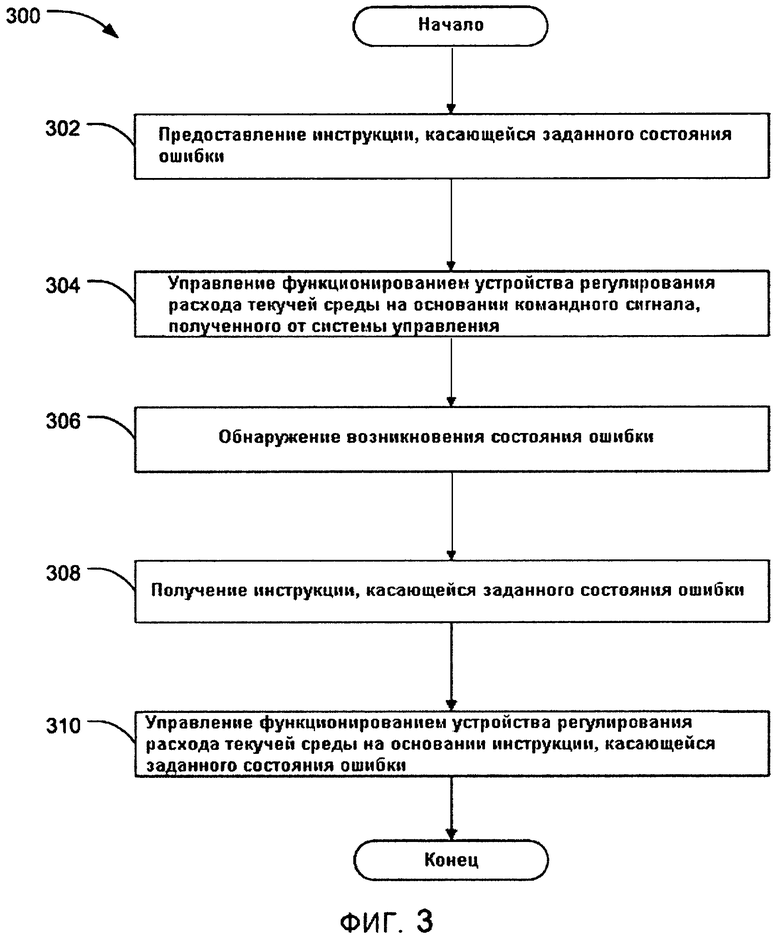
1. Способ (300) управления периферийным устройством (108, 112, 116) регулирования, включающий этапы:
приема через контроллер (102), связанный с периферийным устройством (108, 112, 116) регулирования, данных от системы (122) управления, удаленной от контроллера (102), с целью обеспечения функционирования периферийного устройства (108, 112, 116) регулирования в условиях отсутствия ошибки;
обнаружения (306) возникновения состояния ошибки; и
обеспечения функционирования (506) периферийного устройства (108, 112, 116) регулирования на основании данных, поступающих от системы (122) управления, если возникновение состояния ошибки не обнаружено;
отличающийся тем, что также включает в себя этап:
обеспечения функционирования (508) периферийного устройства (108, 112, 116) регулирования при обнаружении возникновения состояния ошибки на основании инструкции, касающейся заданного состояния ошибки, которая записана в памяти контроллера (102), и заключающейся в обеспечении функционирования периферийного устройства регулирования в первом положении в течение первого интервала времени и во втором положении в течение второго интервала времени.
2. Способ по п. 1, дополнительно включающий этап передачи контроллеру инструкции, касающейся заданного состояния ошибки, через интерфейс контроллера.
3. Способ по п. 1, дополнительно включающий этап отмены переданных данных при обнаружении состояния ошибки.
4. Способ по п. 1, отличающийся тем, что этап обнаружения возникновения состояния ошибки включает контроль параметра технологического процесса с использованием контроллера.
5. Способ по п. 4, отличающийся тем, что этап контроля параметра технологического процесса включает определение прерывания сетевого соединения между системой управления и контроллером.
6. Способ по п. 4, отличающийся тем, что этап контроля параметра технологического процесса включает определение превышения порогового значения температуры среды, окружающей контроллер.
7. Способ по п. 4, отличающийся тем, что этап контроля параметра технологического процесса включает следующие этапы:
передачу контроллеру заданного значения положения для перевода периферийного устройства регулирования в требуемое рабочее положение;
прием измеренного значения положения, представляющего фактическое положение периферийного устройства регулирования; и
сравнение измеренного значения положения и заданного значения положения.
8. Способ по п. 7, дополнительно включающий этап обеспечения функционирования периферийного устройства на основании инструкции, касающейся заданного состояния ошибки, в случае, когда разность между измеренным значением положения и заданным значением положения превышает заданное пороговое значение.
9. Способ по п. 4, отличающийся тем, что этап контроля параметра технологического процесса включает следующие этапы:
получение от датчика положения периферийного устройства регулирования измеренного значения положения, представляющего фактическое положение периферийного устройства регулирования;
сравнение полученного измеренного значения положения с заданным диапазоном калибровки.
10. Способ по п. 9, отличающийся тем, что этап обеспечения функционирования периферийного устройства регулирования включает калибровку периферийного устройства регулирования в случае, когда полученное измеренное значение положения находится за пределами заданного диапазона калибровки.
11. Способ по п. 1, отличающийся тем, что этап обеспечения функционирования периферийного устройства регулирования на основании инструкции, касающейся заданного состояния ошибки, при обнаружении состояния ошибки включает переход устройства регулирования расхода в промежуточное положение между полностью открытым положением и полностью закрытым положением.
12. Способ по п. 1, отличающийся тем, что этап обеспечения функционирования периферийного устройства регулирования на основании инструкции, касающейся заданного состояния ошибки, при обнаружении состояния ошибки включает переход периферийного устройства регулирования в первое положение в течение первого интервала времени и последующий переход периферийного устройства регулирования во второе положение в течение второго интервала времени.
13. Способ по п. 12, отличающийся тем, что первое положение представляет собой первое промежуточное положение и второе положение представляет собой второе промежуточное положение.
14. Способ по п. 1, отличающийся тем, что обеспечение функционирования периферийного устройства регулирования на основании инструкций, касающихся заданного состояния ошибки, включает задержку сигнала управления, подаваемого системой управления, в случае, когда второе периферийное устройство регулирования не находится в требуемом положении, причем функционирование второго периферийного устройства регулирования предшествует функционированию указанного периферийного устройства регулирования.
15. Способ (300) управления периферийным устройством (108, 112, 116) регулирования, включающий этапы:
контроля (502) рабочего параметра системы (122) управления технологическим процессом;
обнаружения (306) состояния ошибки на основании рабочего параметра; и
обеспечения функционирования (506) периферийного устройства (108, 112, 116) регулирования на основании данных, поступающих от удаленной системы (122) управления, если возникновение состояния ошибки не обнаружено;
отличающийся тем, что также включает в себя этап:
управления (508) периферийным устройством (108, 112, 116) регулирования с использованием местного контроллера (102), функционально связанного с периферийным устройством (108, 112, 116) регулирования, на основании по меньшей мере одного параметра заданного состояния ошибки, записанного в памяти контроллера (102), при обнаружении состояния ошибки, причем обеспечение функционирования периферийного устройства регулирования на основании инструкции, касающейся заданного состояния ошибки, заключается в обеспечении функционирования периферийного устройства регулирования в первом положении в течение первого интервала времени и во втором положении в течение второго интервала времени.
16. Способ по п. 15, дополнительно включающий этап выбора параметра заданного состояния ошибки с использованием интерфейса пользователя.
17. Способ по п. 15 или 16, дополнительно включающий этап определения параметра заданного состояния ошибки с использованием интерфейса пользователя.
18. Способ по п. 15 или 16, отличающийся тем, что этап контроля рабочего параметра системы управления технологическим процессом включает контроль по меньшей мере одного параметра из группы, содержащей наличие канала обмена данными, температуру среды, в которой находится местный контроллер, параметр калибровки или параметр положения.
19. Способ по п. 15 или 16, отличающийся тем, что периферийное устройство регулирования содержит гидравлический клапан, и управление периферийным устройством регулирования предусматривает перевод гидравлического клапана контроллером в закрытое положение при прерывании функционирования канала обмена данными.
20. Периферийное устройство (108, 112, 116) регулирования, содержащее:
устройство (130) регулирования расхода, предназначенное для регулирования расхода технологической текучей среды; и
контроллер (102), установленный на периферийном устройстве (108, 112, 116) регулирования, функционально связанный с периферийным устройством (108, 112, 116) регулирования и выполненный с возможностью управления положением устройства (130) регулирования расхода путем приема команды от системы (104), удаленной от контроллера (102), причем контроллер (102) содержит местную систему управления, выполненную с возможностью подачи (508) команды на устройство (130) регулирования расхода на основании параметра заданного состояния ошибки, записанного в памяти местной системы управления, при обнаружении состояния ошибки, причем обеспечение функционирования устройства регулирования расхода на основании инструкции, касающейся заданного состояния ошибки, заключается в обеспечении функционирования устройства регулирования расхода в первом положении в течение первого интервала времени и во втором положении в течение второго интервала времени.
21. Устройство по п. 20, отличающееся тем, что состояние ошибки представляет собой прерывание сетевого обмена данными между контроллером и местной системой управления.
22. Устройство по п. 20 или 21, отличающееся тем, что состояние ошибки представляет собой превышение порогового значения температуры среды, в которой находится контроллер.
23. Устройство по п. 20 или 21, отличающееся тем, что состояние ошибки представляет собой несоответствие измеренного значения положения устройства регулирования расхода текучей среды, представленного датчиком положения периферийного устройства регулирования, и заданного значения положения, поданного системой управления или контроллером.
24. Устройство по п. 20 или 21, дополнительно содержащее интерфейс пользователя, выполненный с возможностью обеспечения пользователя выбором или определением заданного параметра состояния ошибки.
25. Устройство по п. 24, отличающееся тем, что интерфейс пользователя содержит дисплей, выполненный с возможностью подачи запроса на предоставление параметра заданного состояния ошибки, и устройство ввода, выполненное с возможностью ввода параметра заданного состояния ошибки.
26. Устройство по п. 20 или 21, отличающееся тем, что периферийное устройство регулирования содержит клапан для регулирования расхода текучей среды и параметр заданного состояния ошибки представляет собой по меньшей мере положение, обеспечивающее режим дросселирования.
| Колосоуборка | 1923 |
|
SU2009A1 |
| JOHAN AKERBERG et al | |||
| Deterministic downlink transmission in WirelessHART networks enabling wireless control applications, 2010 | |||
| Устройство для избирательного управления двумя реле | 1918 |
|
SU978A1 |
| [он-лайн][Найдено в Интернет, 24.06.2016] | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

