Изобретение относится к способам и устройствам сортировки различных объектов на ограниченное количество классов в соответствии с их формой. Основное применение изобретение находит для процессов сортировки (разбраковки) драгоценных камней по их форме, прежде всего алмазов.
Известные способы сортировки объектов по форме и иным признакам и их аппаратурные реализации основываются на следующих общих принципах: это организация транспортирования последовательности объектов специальным устройством через зону наблюдения, освещение индивидуально каждого проходящего зону наблюдения объекта, получение изображения формы объекта или реакции объекта на освещение в устройстве регистрации, предварительная обработка и преобразование полученного изображения (сигнала) в цифровую форму, анализ полученной таким образом информации в вычислительном устройстве на предмет соответствия заранее установленной системе параметров, определяющих принадлежность объекта к определенному классу, принятие решения и выдача команды на исполнительный механизм о перемещении объекта в соответствующий бункер (накопитель) объектов одного из классов по избранной классификации.
Так, известна установка для автоматической классификации кристаллических объектов (например, алмазного сырья) по цвету или чистоте (Патент США №4,951,825, МПК5 В07С 5/342, В07С 5/36, опубл. 28.08.1990), в которой транспортирующее устройство реализовано в виде комбинации вибропитателя и роторного конвейера с системой вакуумных захватов. В установке имеется зона освещения и наблюдения, включающая осветители и устройства регистрации изображения объектов, а также накопитель объектов с соответствующим принятой классификации числом отделений накопителя. Установка работает следующим образом. Вибропитатель растягивает объекты из общей неклассифицированной массы в последовательность, один за другим. Роторный конвейер подает поштучно классифицируемые объекты в зону освещения и наблюдения, где посредством осветителей и детекторов излучения, прошедшего (отраженного) через (от) объект(а), осуществляется получение информации для принятия классификационного решения. Далее тот же роторный конвейер доставляет объект к сортирующему устройству, выполняющему по команде вычислительного устройства помещение объекта в соответствующее классу объектов отделение накопителя. Очевидны ограничения описанной установки, если классифицирующим признаком будет форма объектов, например форма кристаллов алмазного сырья. Исчерпывающий анализ формы потребовал бы увеличения количества регистрирующих устройств (камер) в зоне наблюдения, при этом часть объекта в вакуумном узле остается недоступной для наблюдения.
В устройстве сортировки (Патент РФ №2016672, МПК5 В07С 5/342, G01N 21/87, опубл. 30.07.1994) предпринята попытка путем усложнения конструкции вакуумного роторного конвейера обеспечить необходимую представительность данных системы наблюдения за счет средств вращения объекта (кристалла) вокруг своей оси при прохождении поля зрения оптической измерительной системы. Описанная установка применима к сортировке объектов по форме. Тем не менее принципиальный недостаток транспортирующей системы на базе роторного конвейера - отсутствие обзора со стороны узла вакуумного крепления кристалла. Другим недостатком описанных устройств и реализуемых ими способов является недостаточная производительность, менее 5 -10 объектов в секунду.
Известно устройство для сортировки кристаллов алмазов (Патент РФ №2424859, МПК В07С 5/342 (2006.01), опубл. 27.07.2011), имеющее узел поштучной подачи объектов и горизонтальный транспортирующий диск. В этой установке имеются средства освещения и наблюдения, управляющее вычислительное устройство и сортировочный узел для помещения кристаллов в бункеры в соответствии с классификационными критериям. Освещение объектов, получение информации о форме осуществляется на горизонтальном транспортирующем диске. Управляющее вычислительное устройство осуществляет анализ полученной информации и выдает на сортировочный узел команду для помещения кристалла в бункер, соответствующий его классифицированной форме. Недостатками этого технического решения являются низкая производительность, неполный обзор поверхности кристалла, возможные нарушения ритмичности подачи кристаллов в зону наблюдения.
Решением, позволяющим совместить требования высокой производительности с полной представительностью направлений обзора объекта, является анализ его формы в фазе свободного падения. Известен способ и устройство сортировки объектов по форме, выбранные нами в качестве прототипа (Патент США №5,184,732, МПК5 В07С 5/342, опубл. 09.02.1993). Согласно способу каждый классифицируемый объект направляется в зону наблюдения в фазе свободного падения. В зоне наблюдения в одной, перпендикулярной направлению падения плоскости расположены, как правило, несколько устройств освещения и наблюдения, которые фиксируют мгновенную картину профиля (силуэта) объекта каждым из устройств наблюдения. За время пролета объекта из зоны наблюдения в нижележащую зону сортировки вычислительное устройство на основе иерархического алгоритма устанавливает принадлежность объекта к одному из классов формы. Например, для сырья алмазов это может быть 16 различных классов.
В упомянутом выше прототипе также раскрыта сущность установки для сортировки кристаллических объектов по форме, включающей зону наблюдения свободно падающих через нее объектов. В этой зоне располагаются устройства освещения объектов и устройства получения изображения объектов для последующей обработки по иерархическому алгоритму с получением классификационного решения относительно принадлежности прошедшего зону наблюдения объекта тому или иному классу формы. В установке предусматривается узел сортировки классифицированных объектов по форме с соответствующими бункерами-накопителями для каждого класса. Производительность такого устройства достигает 10 кристаллов в секунду и более, вплоть до 20. При этом качество сортировки, определяемое как процент кристаллов, подлежащих ручной сортировке после работы установки из их общего количества, было ниже 30 для кристаллов от 1/15 до 4 карат.
Главным недостатком описанных в прототипе способа и устройства является относительно высокая доля кристаллов, неклассифицированных автоматически и подлежащих ручной переборке. Ошибки классификации обусловлены как аппаратной реализацией метода, так и алгоритмом процесса идентификации класса формы, реализуемым вычислительным устройством. Так, расположение осветителей и регистрирующих камер в одной плоскости и обработка изображения пролетающего объекта, полученного в один момент времени для всех регистрирующих устройств, принципиально не исключает ошибки идентификации вследствие случайного расположения объекта в процессе падения. Наращивание количества осветителей и расположенных соосно с ними устройств регистрации (камер) ограничено конструкцией и не приводит к пропорциональному снижению вероятности ошибок идентификации, также и вследствие увеличения массива обрабатываемых данных.
Технический результат в способе сортировки объектов по форме выражается в обеспечении высокой производительности способа сортировки объектов по классам формы с одновременным снижением доли ошибок классификации, выражающейся в числе объектов, подлежащих повторной или ручной переборке.
Технический результат в способе сортировки объектов по форме, заключающемся в поштучной подаче объектов в зону освещения-наблюдения в фазе свободного падения, получении изображения объектов в излучении осветителей от не менее чем восьми электронных устройств формирования изображений, обработке полученных изображений с целью отнесения формы объекта к одному из предустановленных классов формы, формировании команды на исполнительное сортировочное устройство, помещающее объект в соответствующий его форме бункер-накопитель, достигается за счет того, что освещение объекта в зоне наблюдения и формирование изображения его формы осуществляют последовательным включением каждой отдельной пары «осветитель - устройство формирования изображения», от первой до восьмой, в процессе нахождения объекта в зоне освещения-наблюдения.
Технический результат в устройстве для осуществления способа сортировки объектов по форме, состоящем из узла формирования последовательности и подачи объектов на траекторию свободного падения, зоны освещения и наблюдения, зоны сортировки и вычислительного устройства, обрабатывающего изображения классифицируемых объектов, пролетающих зону освещения-наблюдения, достигается за счет того, что каждая из не менее чем восьми пар «осветитель - устройство формирования изображения» расположены в разных плоскостях и равномерно по сфере вокруг точки пересечения траектории свободного падения объекта и оптических осей пар «осветитель - устройство формирования изображения».
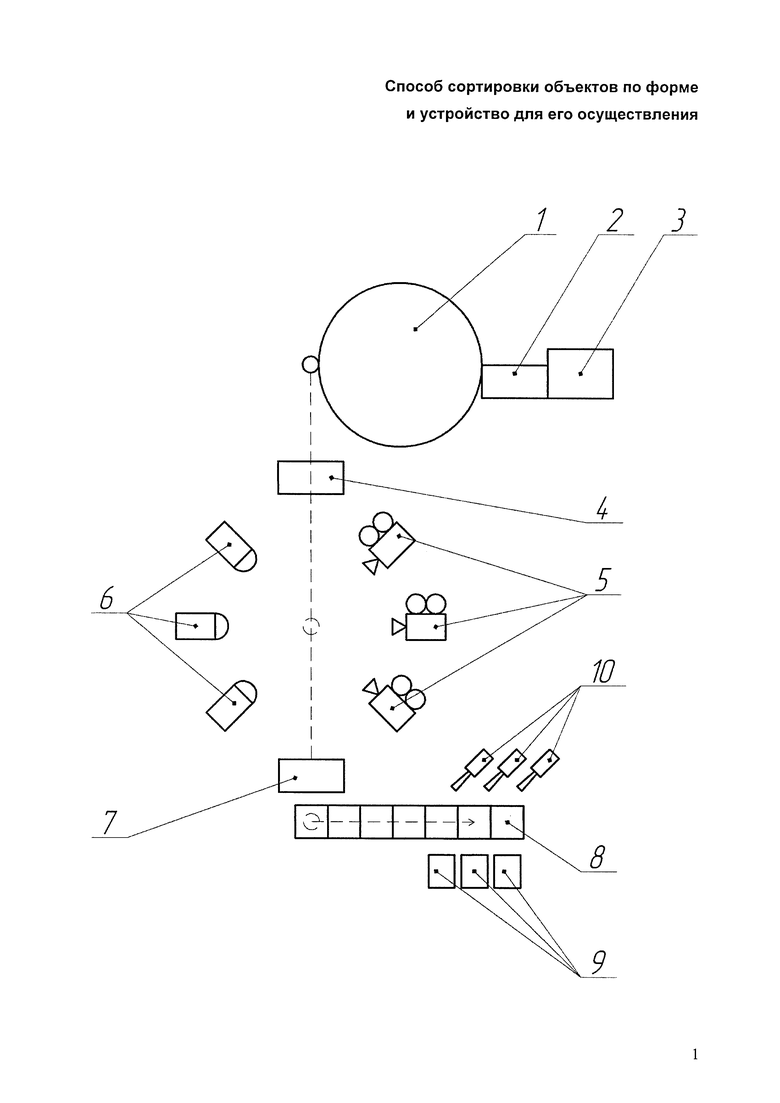
На чертеже приведена блок-схема предлагаемого устройства.
Устройство состоит из подающего объекты на траекторию свободного падения узла, зоны освещения-наблюдения, где в качестве устройств формирования изображений используются электронные камеры, зоны сортировки с накопительными бункерами и вычислительное устройство для обработки получаемых изображений форм объектов. Устройство, реализующее предлагаемый способ, работает следующим образом. Подающий узел, состоящий из вакуумного роторного транспортера 1 и двух вибропитателей 2 и 3, обеспечивает равномерную, регулируемую и воспроизводимую подачу классифицируемых объектов в зону освещения-наблюдения по траектории свободного падения. На входе объекта в зону освещения-наблюдения срабатывает первый оптоэлектронный датчик присутствия 4, запускающий синхронизированный процесс последовательной съемки объекта каждой камерой 5. При этом также последовательно и синхронно включаются светодиодные осветители 6, обеспечивая получение качественного изображения камерой в данной точке траектории свободного падения объекта в зоне освещения-наблюдения. Последовательная съемка кроме оптимизации времени на обработку позволяет избежать искажающих изображения бликов в камере от соседних осветителей. Освещение объекта происходит в инфракрасном диапазоне для получения максимально контрастного изображения. Кроме того, микропроцессор электронных камер проводит предварительную цифровую обработку полученного изображения профиля объекта для повышения контрастности. Прием этой предварительно обработанной информации о форме объекта в виде цифровых изображений вычислительным устройством начинается с момента получения информации с первой камеры и завершается после получения изображения последней. Далее объект идентифицируется определенным классом формы или принимается решение о невозможности классифицировать форму объекта. Пройдя зону освещения-наблюдения, объект перед входом в зону отсечки регистрируется вторым оптоэлектронным датчиком 7. Зона отсечки состоит из вращающегося буферного барабана с ячейками 8, рядом пневматических отсекателей 10 и бункеров-накопителей 9 для отсортированных по форме объектов. После прохождения второго оптоэлектронного датчика 7 объект попадает в одну из ячеек буферного барабана, номер которой передается вычислительному устройству. К моменту, когда ячейка достигает позиции отклонения пневматическими отсекателями, вычислительное устройство идентифицирует классифицируемый объект одним из классов по форме, после чего он пневмоимпульсом отсекателя перемещается в бункер-накопитель 9 соответствующего класса формы.
Отличительные признаки описанного способа сортировки и устройства для его осуществления, а именно последовательный процесс получения изображения формы объекта в точке зоны освещения-наблюдения и расположение осветителей и регистрирующих камер по сфере, обеспечивают снижение доли неклассифицированных объектов в общем их количестве за счет уменьшения вероятности ошибок идентификации. Последовательная передача полученных изображений объекта в процессе его нахождения в зоне освещения-наблюдения позволяет обеспечить высокую производительность обработки объектов при сохранении доли неклассифицированных ниже (10-5)% от их общего числа.
Примером промышленной реализации предлагаемого способа и устройства может служить установка сортировки сырья алмазов по форме УСА-1. Данная установка используется для сортировки алмазного сырья в промышленных условиях. Испытания установки при сортировке на 10 классов по форме сырья крупностью (-6+1,5) мм показали производительность 10 кристаллов в секунду. При этом доля неидентифицированных кристаллов для повторной сортировки была менее 10% от общего числа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ ПО ИХ ЦВЕТОВЫМ ХАРАКТЕРИСТИКАМ | 2019 |
|
RU2699751C1 |
| УСТРОЙСТВО СОРТИРОВКИ ОБЪЕКТОВ ПО ВИЗУАЛЬНЫМ ПРИЗНАКАМ | 2010 |
|
RU2424859C1 |
| СПОСОБ РЕНТГЕНОЛЮМИНЕСЦЕНТНОЙ СЕПАРАЦИИ МИНЕРАЛОВ И РЕНТГЕНОЛЮМИНЕСЦЕНТНЫЙ СЕПАРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2604317C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СОРТИРОВКИ КРИСТАЛЛОВ | 2016 |
|
RU2629740C1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ВЫБОРКИ СЕМЕННОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2792115C1 |
| СПОСОБ СЕПАРАЦИИ МИНЕРАЛОВ | 2008 |
|
RU2379130C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ СЕПАРАТОР МИНЕРАЛОВ | 2019 |
|
RU2715374C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ЗЕРНА ПО ЦВЕТУ | 2008 |
|
RU2403100C2 |
| Оптический сепаратор | 2024 |
|
RU2824518C1 |
Изобретение относится к способам и устройствам сортировки различных объектов на ограниченное количество классов в соответствие с их формой. Основное применение изобретение находит для процессов сортировки (разбраковки) драгоценных камней по их форме, прежде всего алмазов. Способ сортировки объектов в соответствии с их формой заключается в поштучной подаче объектов в зону освещения-наблюдения в фазе свободного падения, получении изображения объектов в излучении осветителей от не менее чем восьми электронных устройств формирования изображений, обработке полученных изображений с целью отнесения формы объекта к одному из предустановленных классов формы, формировании команды на исполнительное сортировочное устройство, помещающее объект в соответствующий его форме бункер-накопитель. Освещение объекта в зоне наблюдения и формирование изображения его формы осуществляют последовательным включением каждой отдельной пары «осветитель - устройство формирования изображения», от первой до восьмой, при нахождении объекта на траектории свободного падения в зоне освещения-наблюдения. При этом каждая из не менее чем восьми пар «осветитель - устройство формирования изображения» расположены в разных плоскостях и равномерно по сфере вокруг точки пересечения траектории свободного падения объекта и оптических осей пар «осветитель - устройство формирования изображения». Технический результат заключается в обеспечении высокой производительности способа сортировки объектов по классам формы с одновременным снижением доли ошибок классификации, выражающейся в числе объектов, подлежащих повторной или ручной переборке. 2 н. и 1 з.п. ф-лы, 1 ил.
1. Способ сортировки объектов в соответствии с их формой, включающий поштучную подачу объектов в зону освещения-наблюдения в фазе свободного падения, получение изображения объектов в излучении осветителей от не менее чем восьми электронных устройств формирования изображений, обработку полученных изображений с целью отнесения формы объекта к одному из предустановленных классов формы, формирование команды на исполнительное сортировочное устройство, помещающее объект в соответствующий его форме бункер-накопитель, отличающийся тем, что для повышения производительности сортировки и снижения числа ошибок классификации освещение объекта в зоне наблюдения и формирование изображения его формы осуществляют последовательным включением каждой отдельной пары «осветитель - устройство формирования изображения», от первой до восьмой, при нахождении объекта на траектории свободного падения в зоне освещения-наблюдения.
2. Способ сортировки объектов в соответствии с их формой по п. 1, в котором в качестве устройств формирования изображения используются высокоскоростные электронные камеры с предварительной обработкой изображения по выделению профиля формы объекта непосредственно в процессоре камеры, до передачи изображения в обработку в персональном компьютере.
3. Устройство для осуществления способа сортировки объектов по форме по п. 1, состоящее из узла формирования последовательности и подачи объектов, зоны освещения и наблюдения, зоны сортировки и вычислительного устройства, обрабатывающего изображения классифицируемых объектов, пролетающих зону наблюдения, отличающееся тем, что каждая из не менее чем восьми пар «осветитель - устройство формирования изображения» расположены в разных плоскостях и равномерно по сфере вокруг точки пересечения траектории свободного падения объекта и оптических осей пар «осветитель - устройство формирования изображения».
| ОПТОВОЛОКОННЫЙ ЛАЗЕРНЫЙ СОРТИРОВЩИК | 2012 |
|
RU2521215C1 |
| US 20100046826 A1, 25.02.2010 | |||
| Способ отделения алмазов от связанной с ними рудной породы в алмазоносном материале | 1988 |
|
SU1809921A3 |

