Изобретение относится к системам дистанционного мониторинга объектов, в частности к системам оптического наблюдения и получения изображений объектов, и может быть использовано, например, в аэрокосмических системах оптического мониторинга объектов, наблюдаемых при угловых скоростях в десятки градусов.
Известен способ получения оптических изображений быстропротекающих процессов, основанный на регистрации ультрафиолетового излучения, и устройство для его осуществления (патент RU 2431121). Способ получения оптических изображений заключается в том, что ультрафиолетовое излучение от исследуемого объекта пропускают через оптическую систему, обеспечивающую прохождение излучения в заданном УФ-диапазоне и подавление волн другой длины, и обеспечивают регистрацию поступления отдельных фотонов. Определяют координаты и время их прихода, формируют угловое распределение плотности потока (изображение) фотонов и его изменение во времени. Основным элементом устройства детектирования УФ-излучения является монофотонный время-координатно-чувствительный детектор (ВКЧД), использующий для умножения потока электронов сборку микроканальных пластин (МКП). Применение ВКЧД на основе МКП обеспечивает хорошее разрешение по времени, на уровне 1 нс. Недостатком устройства является низкая разрешающая способность по угловым координатам, на уровне 1 мрад, что не позволяет получать изображения деталей объектов размером менее 1м с расстояний более 1 км.
Известно устройство формирования изображения и система камеры (патент RU 2540980 С2), предназначенные для получения изображений при низкой освещенности датчика. Устройство включает блок матрицы фотоэлектрических преобразователей (пикселов), блок чувствительных схем, выдающих двоичные сигналы в зависимости от того, произошло или нет падение фотонов на пикселы в заданный период, и блок схемы интегрирования двоичных сигналов для соответствующих пикселов за все время экспозиции. Для формирования двумерного изображения использован своеобразный способ подсчета фотонов по результатам интегрирования двоичных сигналов в каждом пикселе на большом числе периодов двоичной оцифровки потока фотонов с использованием распределения Пуассона.
Однако в силу того, что для получения качественных изображений таким устройством необходимо, чтобы в течение времени экспозиции, включающем большое число периодов двоичной оцифровки потока фотонов, проекция объекта на фоточувствительную матрицу не изменялась, это устройство не может быть применено для получения изображений объектов, наблюдаемых при больших угловых скоростях.
Известны способ и устройство для получения двумерных изображений земной поверхности из космоса, использующие равномерное движение космического аппарата по круговой орбите для обеспечения сканирования наблюдаемой сцены по одной из координат [Бакланов А.И. Системы наблюдения и мониторинга. М.: БИНОМ. Лаборатория знаний, 2009, стр. 50-52]. В этом случае изображение формируется последовательно параллельными строками, расположенными перпендикулярно направлению движения космического аппарата. Для повышения чувствительности в качестве фотоэлектронных преобразователей в устройстве используется матрица фоточувствительных приборов с зарядовой связью (ПЗС) с большим числом элементов в строках, работающая в режиме временной задержки и накопления (ВЗН). Синхронизация относительного движения изображения и зарядовых пакетов вдоль столбцов матрицы ПЗС в этом режиме позволяет осуществлять накопление сигнала. Для небольших угловых скоростей наблюдения земной поверхности из космоса, не более 1 град/с, удается получить качественные изображения местности.
Это техническое решение является наиболее близким по техническому существу аналогом, т.е. прототипом, предлагаемых способа и устройства получения четких изображений малоразмерных быстродвижущихся объектов.
Недостатком прототипа является то, что его использование не позволит получать четкие изображения малоразмерных объектов во всем многообразии возможных изменений от сеанса к сеансу условий наблюдения объектов по дальности и угловым скоростям, в том числе при больших угловых скоростях.
Техническим результатом предлагаемых способа и устройства является получение четких оптических изображений малоразмерных объектов, наблюдаемых при больших угловых скоростях, порядка нескольких десятков градусов в секунду.
Указанный технический результат достигается тем, что в способе получения оптических изображений объектов, используя заранее полученные параметры о движении наблюдаемого объекта, проводят его предварительные наблюдения, по результатам которых уточняют параметры движения объекта относительно наблюдателя, рассчитывают координаты точки пролета и время пролета объекта на допустимом расстоянии от наблюдателя с учетом ограничений по предельно допустимой угловой скорости и освещенности объекта, к расчетному времени наводят устройство, включающее фоточувствительные матрицы приборов с зарядовой связью с режимом временной задержки и накопления, на расчетную точку пролета объекта, обеспечивают движение изображения объекта вдоль столбцов фоточувствительных матриц, по мере движения изображения объекта, в каждой матрице осуществляют синхронное накопление электрических зарядов, их электронное умножение, получают цифровое изображение объекта, и по окончании сеанса наблюдения формируют выходное изображение объекта путем сложения с учетом временной задержки цифровых изображений, полученных в каждом модуле.
Указанный технический результат достигается тем, что устройство (камера) для получения оптических изображений объектов содержит механизм наведения устройства, объектив высокого углового разрешения, в фокальном узле которого расположен блок фокальной настройки, на котором установлено управляемое многоканальное фотоприемное устройство, состоящее из параллельно расположенных матричных фотоприемных модулей, выполненных на основе матриц приборов с зарядовой связью в режиме временной задержки и накопления с многоканальными выходами, сопряженными с линейками электронных лавинных умножителей, выходы которых последовательно соединены с операционными усилителями, аналого-цифровыми преобразователями и входами многоканального буферного запоминающего устройства, соединенного выходом с управляющим вычислительным устройством. Вычислительное устройство формирует команды управления многоканальным фотоприемным устройством и блоком фокальной настройки, определяет по результатам измерений параметры относительного углового движения объекта в момент оптимального сближения с наблюдателем и формирует выходное изображение объекта по окончании сеанса наблюдения.
Заявленные способ и устройство для получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, поясняется чертежами.
На фиг. 1 приведена общая схема устройства получения оптических изображений объектов.
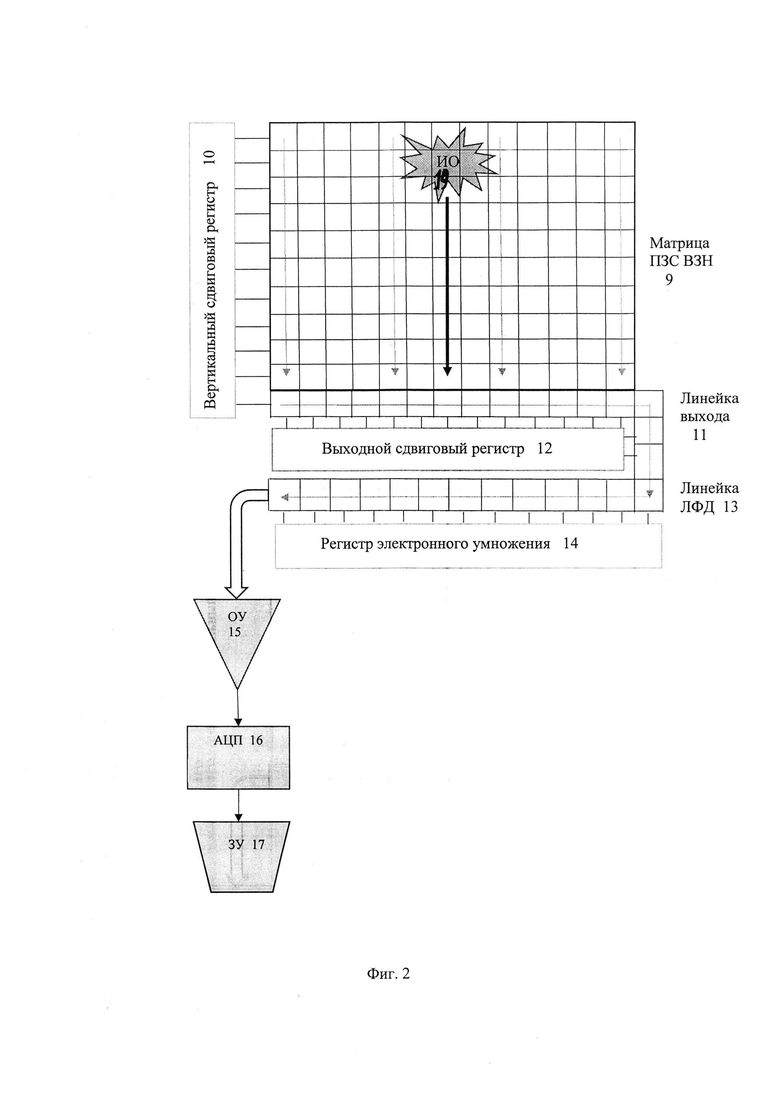
На фиг. 2 схематически показана секция матричного фотоприемного модуля на основе матрицы ПЗС ВЗН и считывающего устройства с электронным умножением.
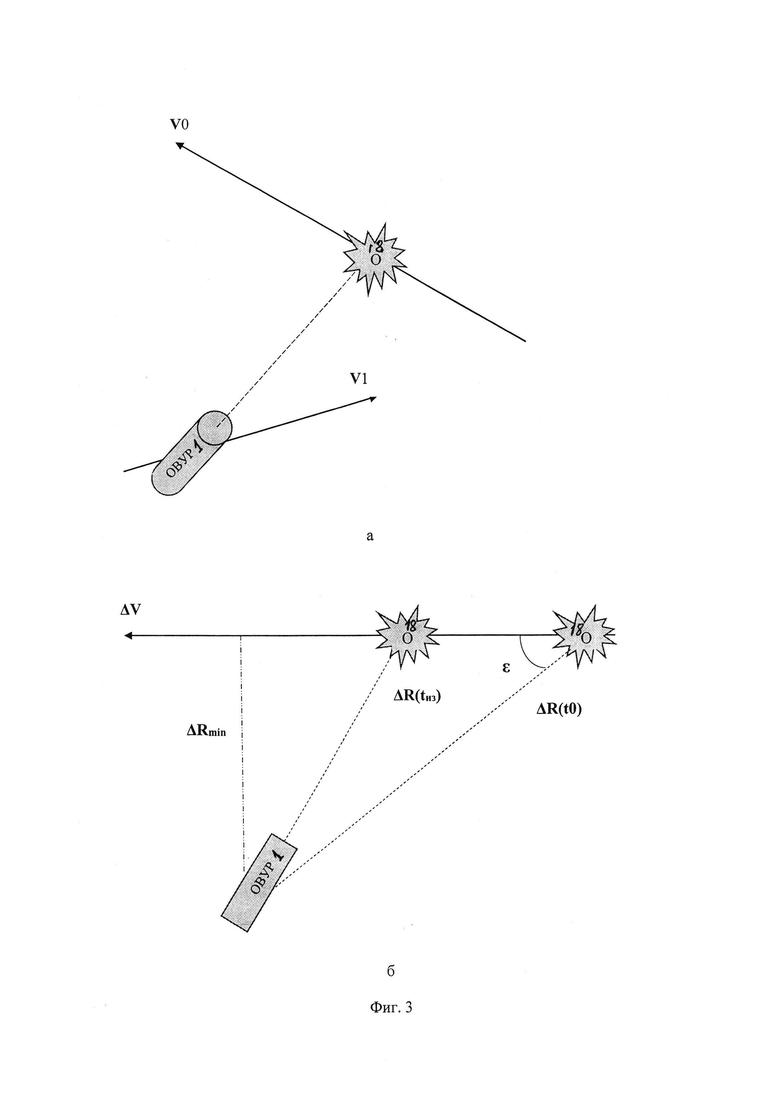
На фиг. 3(а, б) показано относительное расположение наблюдаемого объекта и устройства при движении во время наблюдений.
Устройство (фиг. 1) состоит из механизма наведения (не показан), объектива высокого углового разрешения 1 (ОВУР), блока фокальной настройки 2 (БФН), многоканального фотоприемного устройства 3 (МФПУ), многоканального буферного запоминающего устройства 4 (МБЗУ), управляющего вычислительного устройства 5 (УВУ), синхрогенератора 6 (СГ) и устройства охлаждения 7 (УО).
Устройство устанавливается на платформу, подвижную или неподвижную.
Механизм наведения обеспечивает нацеливание устройства на объект в процессе проведения наблюдений.
Наведение устройства может быть реализовано различными способами:
путем поворота платформы, на которой установлено устройство,
путем использования двухосного подвеса устройства,
путем использования двухосного подвеса внешнего зеркала, установленного перед объективом, а также путем комбинирования этих способов.
Объектив 1 имеет высокую угловую разрешающую способность в заданном поле зрения. Блок фокальной настройки 2 по командам вычислительного устройства 5 выполняет перемещение фотоприемного устройства 3 вдоль оптической оси объектива для получения наилучшего пространственного разрешения на расчетной дальности, а также управляемый поворот фотоприемного устройства вокруг оптической оси, чтобы направление движения изображения объекта по фокальной плоскости в текущий момент было перпендикулярно строкам матриц приборов с зарядовой связью в режиме временной задержки и накопления (ПЗС ВЗН). Для выполнения этих функций применяются механические приводы, управляемые вычислительным устройством.
Многоканальное фотоприемное устройство 3 представляет собой сборку из одинаковых параллельно расположенных на фокальной плоскости управляемых матричных фотоприемных модулей 8 (МФПМ,) на основе матриц ПЗС ВЗН с многоканальным выходом.
На фиг. 1 показано четыре фотоприемных модуля. В конкретных устройствах их может быть больше или меньше в зависимости от конкретных условий применения.
Многоканальное буферное запоминающее устройство 4 осуществляет параллельное запоминание оцифрованных данных, поступающих с выходов фотоприемных модулей 8.
Управляющее вычислительное устройство 5 формирует команды управления функциональными узлами устройства (камеры), обеспечивает совместную обработку в масштабе реального времени записанных в запоминающее устройство данных, определяет координаты положения и вектор скорости перемещения изображения объекта на фокальной плоскости во время наблюдения, формирует выходного изображения объекта по окончании сеанса наблюдения.
Синхрогенератор 6 обеспечивает точную временную привязку и синхронизацию работы устройства в целом и всех его функциональных узлов.
Устройство охлаждения 7 обеспечивает необходимый температурный режим для вышеуказанных функциональных блоков аппаратуры.
Излучение объекта 18 (О), движущегося в поле зрения объектива, проецируется объективом на фокальную плоскость и создает движущееся вдоль столбцов фоточувствительных матриц изображение объекта 19 (ИО). Направление движения изображения объекта показано стрелкой (фиг. 1, 2).
Продолжительность интервала времени наблюдения объекта, которая прямо пропорциональна линейному размеру многоканального фотоприемного устройства вдоль направления движения изображения объекта и обратно пропорциональна линейной скорости перемещения изображения по фокальной плоскости, может быть очень мала (при наблюдениях в космосе порядка миллисекунд), что приводит к жестким требованиям по чувствительности и быстродействию фотоприемного модуля, а также к быстродействию запоминающего и вычислительного устройств.
Для обеспечения высокой чувствительности фотоприемных модулей в считывающих устройствах перед выходными усилителями устанавливаются блоки электронного умножения сигнальных зарядовых пакетов.
Для обеспечения высокого быстродействия устройств считывания, запоминания и численной обработки полученных измерений применяется разделение потока данных на множество параллельно работающих каналов. В каждом канале считываются и запоминаются данные, полученные в соответствующей секции матрицы ПЗС ВЗН.
Секция матричного фотоприемного модуля интегрированного фотоприемного устройства на основе матрицы ПЗС ВЗН и считывающего устройства с электронным умножением схематически показана на фиг. 2.
Формирование изображения в матрице ПЗС ВЗН 9 осуществляется известным образом [1]. Изображение объекта 19 (ИО) движется вдоль столбцов матрицы ПЗС ВЗН. Направление движения изображения объекта по матрице показано жирной стрелкой. Излучение элементов объекта приводит к образованию в соответствующих элементах (пикселах) матрицы электрических зарядов, которые накапливаются во времени и образуют сигнальные зарядовые пакеты. Вертикальный сдвиговый регистр 10 осуществляет построчный перенос зарядовых пакетов вдоль столбцов с тактовой частотой, согласованной с линейной скоростью движения изображения объекта по фоточувствительной матрице. Вертикальный перенос зарядовых пакетов условно показан тонкими линиями. Из нижней строки матрицы накопленные зарядовые пакеты передаются в выходную линейку 11, из которой затем за один тактовый период вертикального регистра передаются выходным сдвиговым регистром 12 в считывающее устройство с электронным умножением.
В состав считывающего устройства входит многокаскадный электронный умножитель, включающий линейку лавинных умножителей 13 (ЛЛУ) и регистр электронного умножения 14, операционный усилитель 15 (ОУ) и аналогово-цифровой преобразователь 16 (АЦП). Многокаскадный электронный умножитель осуществляет электронное умножение зарядовых пакетов, он является входным блоком считывающего устройства и необходим для уменьшения влияния шумов считывания на качество изображений, получаемых при малых временах накопления из-за больших угловых скоростей. Тактовая частота считывающего устройства, включая регистр электронного умножения, равна тактовой частоте выходного сдвигового регистра. Операционный усилитель 15, осуществляет преобразование заряда в напряжение. Аналогово-цифровой преобразователь 16 преобразует аналоговые значения напряжения в цифровую форму. Оцифрованные сигналы передаются в соответствующую секцию многоканального буферного запоминающего устройства 4 (МБЗУ).
Работой фотоприемных модулей управляет вычислительное устройство 5. Тактовые частоты сдвиговых регистров фотоприемных модулей рассчитываются в вычислительном устройстве с использованием зависимости расстояния между наблюдаемым объектом и устройством от времени |ΔR(t)|. Графические иллюстрации для пояснения расчетных формул приведены на фиг. 3.
На фиг. 3б схематически показано пространственное движение объекта 18(О) и устройства (наблюдателя) во время сеанса наблюдения в общем случае, когда оба движутся. Так как продолжительность сеанса наблюдения объектов при больших угловых скоростях мала, то в течении этого времени движение объекта и устройства можно считать прямолинейным и равномерным со скоростями V0 и V1 соответственно, при этом пространственные координаты объекта R0 и устройства R1 изменяются во времени по линейному закону (t0 - условный момент начала отсчета времени):
R 0(t)=R0(t0)+V0(t-t0)
R 1(t)=R1(t0)+V1(t-t0)
На фиг. 1б схематически показано движение объекта 18 (О) относительно устройства во время сеанса наблюдения. Положение объекта в системе координат устройства ΔR=R0-R1 также изменяется во времени по линейному закону

В системе координат устройства объект во время сеанса наблюдения движется в плоскости, образованной векторами ΔR(t0) и ΔV. Минимальное расстояние от объекта ΔRmin до устройства определяется соотношением
ΔRmin=|ΔR(t0)|sinε, где ε - угол между векторами ΔR(t0) и ΔV,
а текущая угловая скорость Ω(t) -

В момент наибольшего сближения угловая скорость достигает максимального значения Ωmax=|ΔV|/ΔRmin.
С помощью соотношения (2) по известным значениям относительной скорости ΔV, минимального расстояния ΔRmin, предельно допустимой угловой скорости Ωпред определяется допустимое расстояние |ΔRдоп|, а затем с помощью соотношения (1) выбирается время получения изображения tиз с учетом наилучшей освещенности объекта.
Тактовая частота вертикальных сдвиговых регистров фотоприемных модулей определяется с помощью соотношения ƒтакт=Ω(tопт)/δпикс, где δпикс - угловой размер пиксела по вертикали (вдоль столбцов).
Устройство работает следующим образом.
На неподвижную (с известными координатами) или подвижную (с известной текущей траекторией движения) платформу устанавливают устройство получения изображений и проводят наблюдение выбранного приближающегося объекта с учетом заранее заданных сведений о его движении относительно наблюдателя. На начальной стадии наблюдений, пока объект находится на относительно большом удалении, используя известные методы, наводят устройство на объект и получают последовательность измерений угловых координат объекта относительно наблюдателя [2]. По этим угловым измерениям на вычислительном устройстве, используя известные алгоритмы, уточняют траекторию сближения объекта и наблюдателя [3].
Рассчитывают на вычислительном устройстве пространственно-временные параметры точки оптимального сближения объекта с наблюдателем с учетом ограничений по перенацеливанию устройства и внешних условий наблюдения и вычисляют, использую формулы (1), (2) соответствующие этому моменту параметры углового движения объекта в системе координат наблюдателя (угловые координаты и угловые скорости).
Заранее нацеливают и фиксируют устройство в направлении расчетных угловых координат точки оптимального сближения и на интервале времени, включающем момент оптимального сближения, осуществляют наблюдение объекта на оптимальном расстоянии |ΔR(tопт)| (и соответствующей угловой скоростью Ω(tопт)). В это время изображение объекта движется вдоль фокальной плоскости с линейной скоростью VF, равной произведению фокального расстояния объектива F и угловой скорости объекта Ω(tопт). Устройство нацеливается механизмом наведения таким образом, чтобы движение изображения объекта проходило строго вдоль столбцов матриц ПЗС ВЗН фотоприемных модулей (см. фиг. 1, 2). В пикселах фоточувствительных матриц благодаря фотоэффекту генерируются заряды, количество которых зависит от облученности пиксела в текущий момент времени и временной задержки. Эти вновь сгенерированные заряды добавляются к уже накопленным в пикселах к этому времени зарядовым пакетам, которые затем передаются по столбцам в соответствующие пикселы следующей строки. И так далее. Для синхронизации движения изображения объекта и процесса передачи зарядовых пакетов по столбцам тактовая частота вертикального регистра временной задержки и накопления (см. фиг. 2) устанавливается по команде управления от вычислительного устройства так, чтобы линейная скорость переноса заряда по столбцам матрицы ПЗС ВЗН данного фотоприемного модуля была равна текущей линейной скорости движения по этому модулю изображения объекта VF, заранее рассчитанной на вычислительном устройстве. Заряды, накопленные в матрице ПЗС ВЗН, при их переносе, начиная с верхней строки до нижней, поступают в выходные линейки, из которых затем передаются за один тактовый период вертикального регистра выходными сдвиговыми регистрами в соответствующие линейки электронного умножения, как показано на фиг. 2. В элементах этих линеек в каждом такте переноса зарядов с той же тактовой частотой, что и в выходных сдвиговых регистрах, осуществляется контролируемое (небольшое) лавинное умножение электронов за счет ударной ионизации. Результирующий коэффициент умножения подбирается путем изменения числа каскадов умножения - длины линейки ЛФД (при длине линейки ~300-400 он составляет ~100-400) [4]. С выхода линеек электронного умножения зарядовые пакеты поступают затем в операционный усилитель (ОУ), осуществляющий их преобразование в сигналы электрического напряжения, которые оцифровываются аналого-цифровым преобразователем (АЦП) и передаются в соответствующую секцию многоканального буферного запоминающего устройства (МБЗУ).
Количественные оценки качества изображений для предлагаемого способа проведены для диффузной модели рассеяния солнечного излучения на поверхности объекта. Тогда локальная спектральная плотность яркости рассеянного солнечного излучения В(λ) определяется соотношением
В(λ)=kd(λ)(nsls)/π,
где λ - длина волны, kd(λ) - коэффициент диффузного рассеяния, Es(λ) - спектральная плотность потока солнечного излучения, ns - локальная нормаль к поверхности рассеивающего элемента, ls - вектор направления на Солнце.
Спектр интенсивности рассеянного излучения, падающего на фотоприемный элемент
I(λ)=B(λ)⋅Ω⋅Seƒ(λ),
где Ω - телесный угол фотоприемного элемента, Seƒ (λ) - эффективная площадь входного зрачка телескопа с учетом спектральной функции пропускания оптической системы.
Средняя частота генерации электронов в фотоприемном элементе под действием падающего излучения определяется соотношением
где η(λ) - квантовая эффективность фотоэлектронного преобразования, h - постоянная Планка, с - скорость света.
Среднее число электронов, сгенерированных фоточувствительным элементом за некоторое время τ, приближенно можно оценить по формуле [1]
 ,
,
где IΔλ, ηΔλ - интегральная облученность фотоприемного элемента и среднее значение квантовой эффективности в спектральной полосе фотоприемника Δλ=λ2-λ1, λс - центральная длина волны в полосе Δλ
Результаты расчетов среднеквадратических значений относительной ошибки выходного накопленного изображения (величина, обратно пропорциональная отношению сигнал-шум) при различных значениях угловой скорости Ωopt и количества тактов накопления N сигналов при пролете объекта в поле зрения устройства представлены в таблице 1. При расчетах использованы примерные значения характеристик матриц ПЗС ВЗН, представленных в [5]. В частности, размер пикселов - 10 мкм, эффективная спектральная полоса - 300-900 нм, интегральный коэффициент фото-электронного преобразования с учетом квантовой эффективности в спектральной полосе - 20%. Расчет проведен для случая диффузно отражающей поверхности объектов; предполагалось, что коэффициент диффузного отражения солнечного излучения постоянен в спектральной полосе чувствительности фотоприемных матриц и равен 0.1, угол падения солнечного излучения на элемент поверхности - 45°. Для эффективного диаметра апертуры объектива использовалось значение 0.25 м, для фокусного расстояния - 5 м.
При расчетах принималось, что охлаждение фотоприемной аппаратуры и электронное накопление обусловливают незначительность собственных шумов фотоприемника и шумов считывания, так что основным источником шума является фотонный шум [6].

Как видно из таблицы, относительная точность выходного накопленного изображения при рассматриваемых параметрах устройства при общем числе строк ~1000 не превышает 0.5-2%. Такой точности достаточно, например, для надежного различения малоразмерных (~0.1 м) деталей объектов, наблюдаемых при пролете на расстояниях в десятки километров при угловых скоростях 5-80 градусов в секунду. При использовании применяемых в настоящее время на практике матриц ПЗС ВЗН с числом строк 128 [5] многоканальное фотоприемное устройство в этом случае должно состоять из восьми фотоприемных модулей с такими матрицами.
Источники информации, принятые во внимание
1. Бакланов А.И. Системы наблюдения и мониторинга. М.: БИНОМ. Лаборатория знаний, 2009, стр. 50-52.
2. Лазарев Л.П. Оптико-электронные приборы наведения. М.: Издательство «Машиностроение», 1989, стр. 169-174.
3. Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.: Издательство «Советское радио», 1978, стр. 67-72, 270-278.
4. Казначеев С.А. «Особенности получения ТВ-изображений при ограниченных потоках фотонов», Научное издание МГТУ им. Н.Э. Баумана «Наука и образование», №6, 2014, стр. 209-221.
5. Бакланов А.И.//Вопросы радиоэлектроники. Серия Техника телевидения, Санкт-Петербург, 2012, вып. 2, стр. 3-19.
6. Салех Б., Тейх М. Оптика и фотоника. Принципы и применения. Т.2. Долгопрудный, Издательский дом «Интеллект», 2012, стр. 279-307.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ОПТИКО-ЭЛЕКТРОННОЙ АППАРАТУРЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 2019 |
|
RU2730101C1 |
| Многощелевая гиперспектральная камера с комбинированным отслеживанием изображения | 2016 |
|
RU2624622C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| ФОТОЧУВСТВИТЕЛЬНАЯ МИКРОСХЕМА С ЗАРЯДОВОЙ СВЯЗЬЮ | 1987 |
|
RU2087051C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2010 |
|
RU2442109C1 |
| НАШЛЕМНАЯ РАЗВЕДЫВАТЕЛЬНАЯ СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2349864C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ИЗМЕРЕНИЯ СКОРОСТИ, ДАЛЬНОСТИ И УГЛОВЫХ КООРДИНАТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2521203C1 |

Способ получения оптических изображений объектов заключается в том, что, используя заранее полученные параметры о движении наблюдаемого объекта, проводят его предварительные наблюдения, по результатам которых уточняют параметры движения объекта относительно наблюдателя, рассчитывают координаты точки пролета и время пролета объекта на допустимом расстоянии от наблюдателя с учетом ограничений по предельно допустимой угловой скорости и освещенности объекта, к расчетному времени наводят устройство регистрации на расчетную точку пролета объекта, обеспечивают движение изображения объекта вдоль столбцов фоточувствительных матриц, осуществляют синхронное накопление электрических зарядов, их электронное умножение, получают цифровое изображение объекта и по окончании сеанса наблюдения формируют выходное изображение объекта путем сложения с учетом временной задержки цифровых изображений. Технический результат заключается в получении четких оптических изображений малоразмерных объектов, наблюдаемых при больших угловых скоростях. 2 н.п. ф-лы, 1 табл., 3 ил.
1. Способ получения оптических изображений объектов, заключающийся в том, что, используя заранее полученные параметры о движении наблюдаемого объекта, проводят его предварительные наблюдения, по результатам которых уточняют параметры движения объекта относительно наблюдателя, рассчитывают координаты точки пролета и время пролета объекта на допустимом расстоянии от наблюдателя с учетом ограничений по предельно допустимой угловой скорости и освещенности объекта, к расчетному времени наводят устройство, включающее фоточувствительные матрицы приборов с зарядовой связью с режимом временной задержки и накопления, на расчетную точку пролета объекта, обеспечивают движение изображения объекта вдоль столбцов фоточувствительных матриц, по мере движения изображения объекта в каждой матрице осуществляют синхронное накопление электрических зарядов, их электронное умножение и получают цифровое изображение объекта, и по окончании сеанса наблюдения формируют выходное изображение объекта путем сложения с учетом временной задержки цифровых изображений, полученных в каждой матрице.
2. Устройство для получения оптических изображений объектов, содержащее механизм наведения устройства на объект, объектив высокого углового разрешения, в фокальном узле которого расположен блок фокальной настройки, на котором установлено управляемое многоканальное фотоприемное устройство, состоящее из параллельно расположенных матричных фотоприемных модулей, выполненных на основе матриц приборов с зарядовой связью в режиме временной задержки и накопления с многоканальными выходами, сопряженными с линейками электронных лавинных умножителей, выходы которых последовательно соединены с операционными усилителями, аналого-цифровыми преобразователями и входами многоканального буферного запоминающего устройства, соединенного выходом с управляющим вычислительным устройством, выполненным с возможностью формирования команд управления многоканальным фотоприемным устройством и блоком фокальной настройки, определения по результатам измерений параметров относительного углового движения объекта в момент оптимального сближения с наблюдателем и формирования выходного изображения объекта по окончании сеанса наблюдения.
| US 20070126918 A1, 07.06.2007 | |||
| US 20070230938 A1, 04.10.2007 | |||
| US 6064398 A1, 16.05.2000 | |||
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СИСТЕМА КАМЕРЫ | 2011 |
|
RU2540980C2 |

