Изобретение относится к машиностроению, в частности к механическим передачам.
Известен механический усилитель мощности, который составлен из одной или нескольких ячеек усиления, кинематически связанных с приводом. Каждая ячейка включает ведущую и ведомую пластины, жестко соединенные соответственно с входным и выходным валами. Пластины в пределах каждой ячейки подвижно соединены друг с другом перекладиной, вращающейся вокруг точки опоры, разделяющей ее на длинное и короткое плечо. При этом конец длинного плеча перекладины шарнирно связан с ведущей пластиной, а конец короткого плеча перекладины шарнирно связан с ведомой пластиной. Фактически перекладина с точкой опоры представляет собой рычаг, который совершает вращательное движение вокруг точки опоры. Передаточное отношение рычага, как известно, зависит от соотношения протяженности длинного и короткого плеча перекладины. Это значит, что на выходном вале механического усилителя мощности теоретически можно получить любое усилие. Для того чтобы перекладины не делать очень длинными и уменьшить действующий на них изгибающий момент, предусмотрено применять ряд отдельных ячеек усиления с относительно короткими перекладинами. При этом усилие, развиваемое на выходных валах ячеек, можно складывать. (Патент на полезную модель RU 147947 U1)
Недостатком этого усилителя является возможность преобразования только вращающего момента. Мощность он может только терять.
Известен механический усилитель мощности, который снабжен дополнительной самотормозящейся передачей с приводом, размещенной между основной передачей и управляющим двигателем и кинематически связанной с ними. Кроме того, привод дополнительной самотормозящейся передачи представляет собой промежуточный силовой двигатель или кинематическую цепь, связывающую эту передачу с силовым двигателем. Механический усилитель мощности содержит управляющий двигатель 1, подключенный к червяку 2 дополнительной самотормозящейся передачи, а с ее червячным колесом 3 соединен привод, в качестве которого использован в одном варианте промежуточный силовой двигатель 4 (фиг. 1), а в другом (фиг. 2) кинематическая цепь, состоящая из конических зубчатых колес 5 и 6, соединенных с силовым двигателем 7. (SU 853239)
Недостатком этого изобретения является необходимость тормозить управляемый двигатель, в соответствии с изменениями скорости управляющего двигателя.
Целью изобретения является устранение необходимости тормозить источник кинетической энергии вращения.
Поставленная цель достигается тем, что в механическом аналоге транзистора, содержащем управляющий элемент и источник кинетической энергии вращения, использована универсальная самоцентрирующаяся система, в которой управляющий элемент изменяет расстояние между центрами вращения оснований универсальной самоцентрирующейся системы, источник кинетической энергии вращения соединен с одним из оснований, а усиленный сигнал управляющего элемента передают на шестерню выходного вала, которая имеет зубчатое зацепление с шестернями, закрепленными на звездочках, роликах или шкивах одного из оснований универсальной самоцентрирующейся системы.
Универсальная самоцентрирующаяся система известна из изобретений : ( RU 2014106630 A , RU 2014106628 A, RU 2014106627 A, RU 2014106146 A, RU 2013157051 A, RU 2013154311 A, RU 2013153163A, RU 2013152649 A, RU 2013148896 A, RU 2013145988 A, RU 2013145987 A, RU 2013145253 A, RU 2013144445 A, RU 2013144444 A, RU 2013142690 A, RU 2013142204 A, RU 2013142203 A; DE102013019629A1, DE102013019628A1, DE102013019627A1, DE102013019593A1, DE102013019592A1, DE102013019404A1, DE102013019402A1, DE102012018132A1, DE102012018131A1, DE102012017180A1, DE102012016380A1, DE102012016314A1, DE102012013308A1, DE102012012586A1, DE102012002076A1, DE102012001232A1, DE102012000316A1).
Универсальная самоцентрирующаяся система имеет внешнее и внутреннее основания, расположенные в одной плоскости. Внешнее основание охватывает внутреннее основание. На каждом основании закреплены три или более роликов, звездочек или шкивов вращения. Число роликов, шкивов или звездочек на каждом основании одинаково. Каждый ролик, шкив или звездочка может быть заменен на два ролика, шкива или звездочки для того, чтобы использовать участок троса, ремня или цепи между роликами, шкивами или звездочками для натяжения. Воздействие силы натяжения на участок троса, цепи или ремня между роликами, шкивами или звездочками не влияет на свойства универсальной самоцентрирующейся системы, если они находятся на одном основании. Способ натяжения ремня, троса или цепи известен из изобретения: (RU 2013147711 A). В приведенных изобретениях использовались статические свойства универсальной самоцентрирующейся системы. В заявляемом изобретении использовано одно из динамических свойств универсальной самоцентрирующейся системы: совместное вращение связанных между собой внутреннего и внешнего оснований возможно даже при несовпадении осей вращения оснований. Это означает, что внутреннее и внешнее основания могут вращаться каждое относительно своих несовпадающих осей вращения при воздействии вращающего момента на одно из оснований. В дальнейшем описании будут использоваться звездочки с цепью.
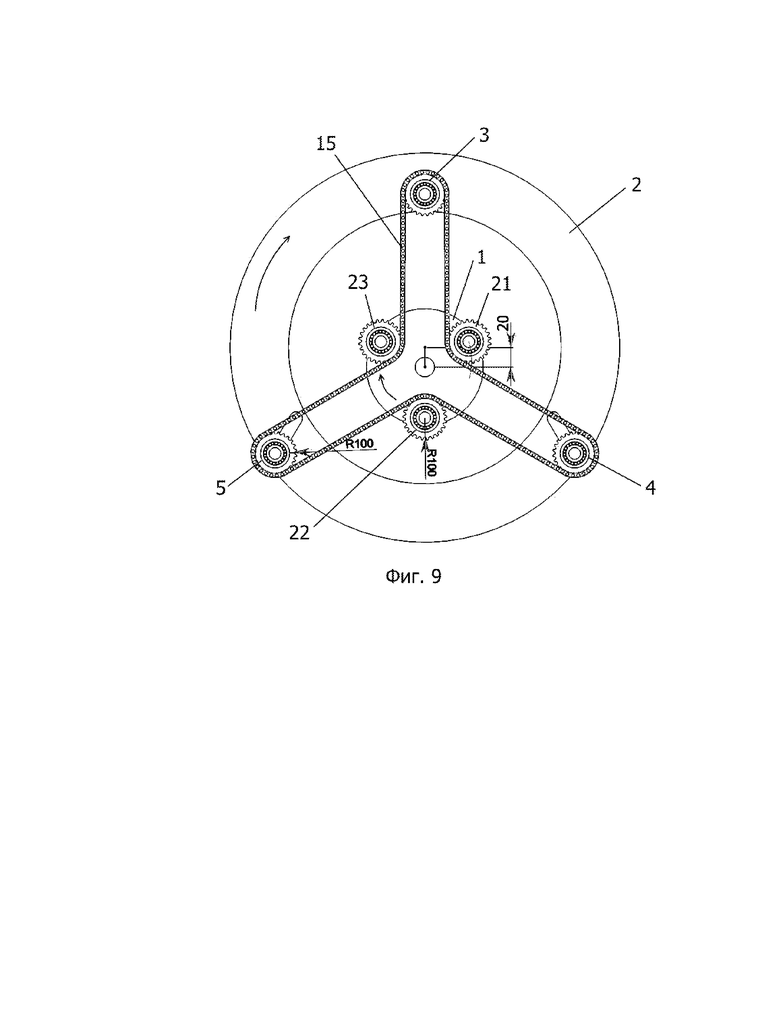
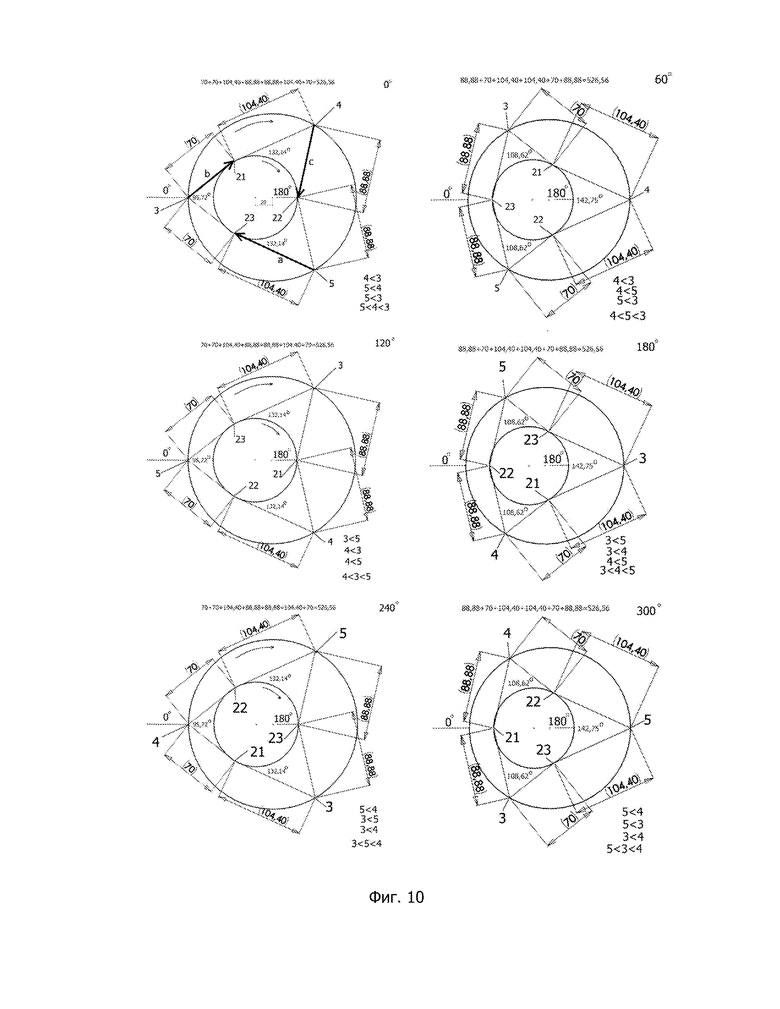
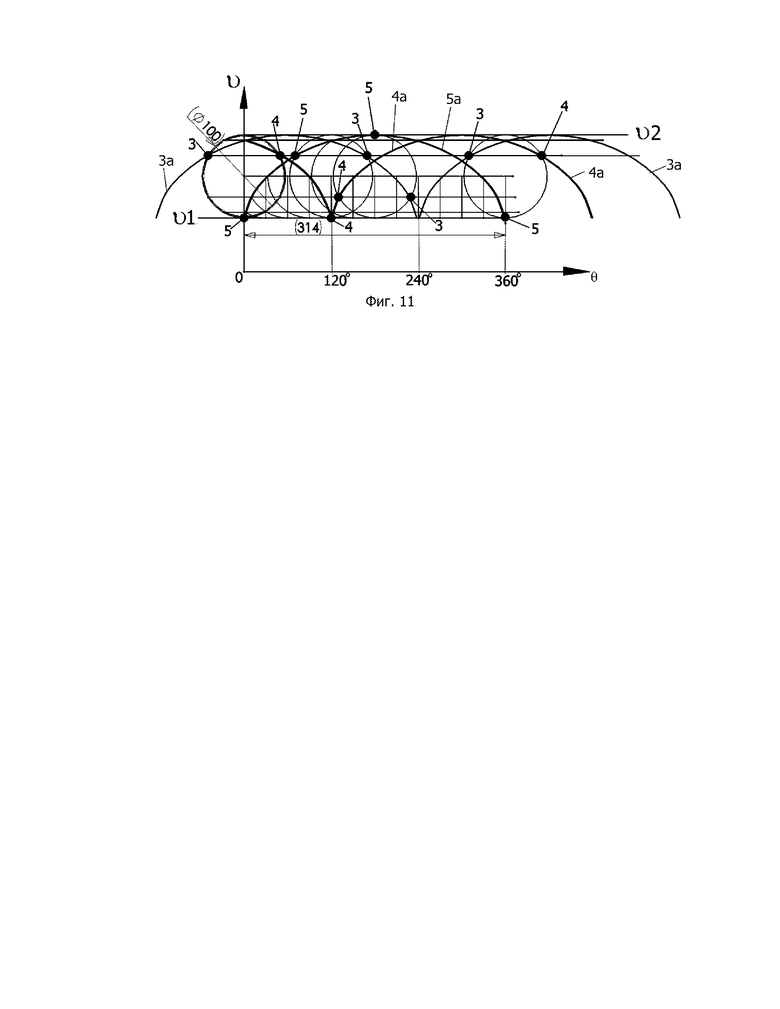
1. Для упрощения доказательства возможности совместного вращения оснований в дальнейшем используется универсальная самоцентрирующаяся система, представленная на фигуре 9. Радиус звездочек выбран равным нулю. Оси внутреннего основания 1 и внешнего основания 2 смещены на величину 20. В результате фигура 9 преобразована в схему, представленную на фигурах 10. На фигурах 10 представлена универсальная самоцентрирующаяся система, повернутая на различные углы. Длина цепи остается при этом неизменной. Это означает, что нет никаких противоречий для осуществления вращения универсальной самоцентрирующейся системы. Перемещение цепи происходит с постоянной скоростью. Этому способствует то, что звездочки внутреннего основания 1 могут вращаться только с постоянной скоростью, так как на них закреплены шестерни, передающие вращение на выходной вал. Компенсация изменения длины участков цепи между звездочками внешнего основания 2 и звездочками внутреннего основания 1 происходит за счет циклического изменения скорости вращения звездочек 3, 4, 5 внешнего основания 2. Графики скоростей υ2 цепи и скоростей звездочек 3, 4, 5 представлены на фигуре 11.
2. Для доказательства прецессии звездочек 3, 4, 5 используются фигуры 10 и 11. Начальное положение универсальной самоцентрирующейся системы представлено на фигуре 10 при угле поворота, равном нулю градусов. Для поворота универсальной самоцентрирующейся системы на участке 0о-60о необходимо выполнения условия: υ 5< υ 4< υ 3, υ 5 - скорость звездочки 5, υ 4 - скорость звездочки 4, υ 3 - скорость звездочки 3. При этом длины цепи между звездочками 3-4, 4-5 будут увеличиваться. Длина цепи между звездочками 5-3 будет уменьшаться.
Аналогично, на участке 60о-120о должно выполняться условие: υ 4< υ 5< υ 3.
На участке 120о-180о должно выполняться условие: υ 4< υ 3< υ 5.
На участке 180о-240о должно выполняться условие: υ 3< υ 4< υ 5.
На участке 240о-300о должно выполняться условие: υ 3< υ 5< υ 4.
На участке 300о-360о должно выполняться условие: υ 5< υ 3< υ 4.
Все эти условия могут соблюдаться при использовании циклоиды. На фигуре 11 представлены графики изменения скоростей звездочек 3, 4, 5. Каждая звездочка имеет свою циклоиду. Циклоиды 3a, 4a, 5a звездочек 3, 4, 5 смещены на угол 120о относительно друг друга. В точках 0о, 120о, 240о, 360о происходит смена знаков неравенств для звездочек, находящихся в верней части циклоид. Например, при преодолении точки 0о неравенство υ 3< υ 4 изменяется на неравенство υ 3> υ 4. При этом скорости звездочек, находящихся в верхней части циклоиды, равны между собой. Векторы a, b, c направлены по касательным к звездочкам 3, 4, 5 и обеспечивают изменение скоростей в соответствии с графиком на фигуре 11.
Скорость цепи обозначена υ2. Наименьшая скорость звездочек обозначена υ1.
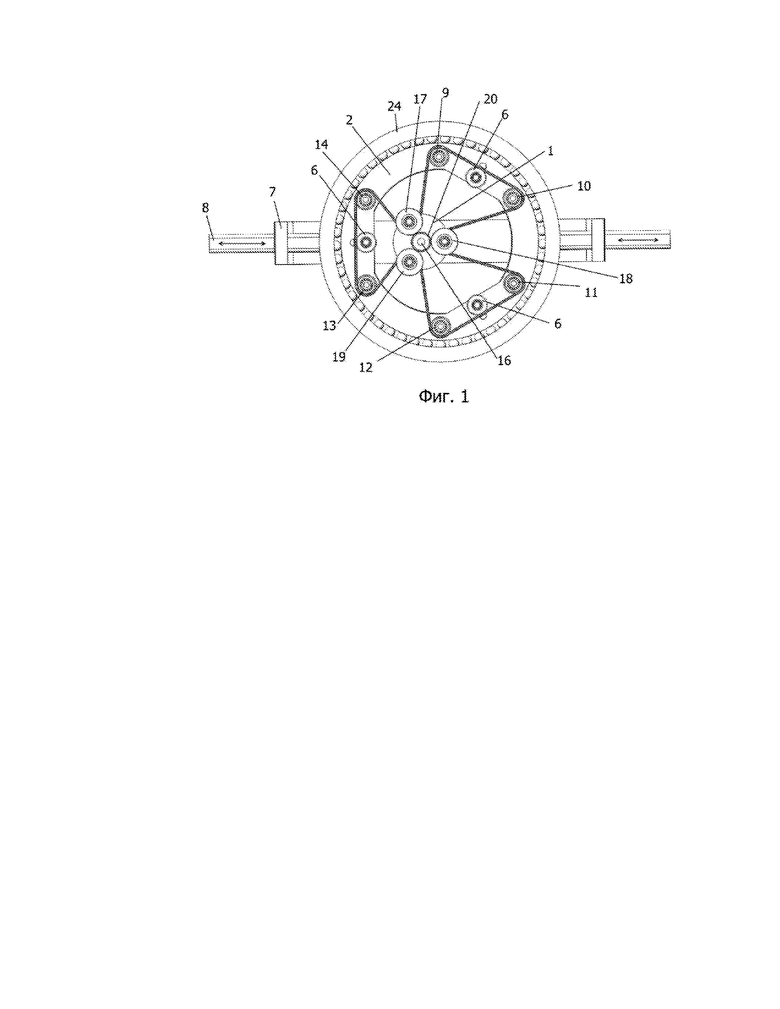
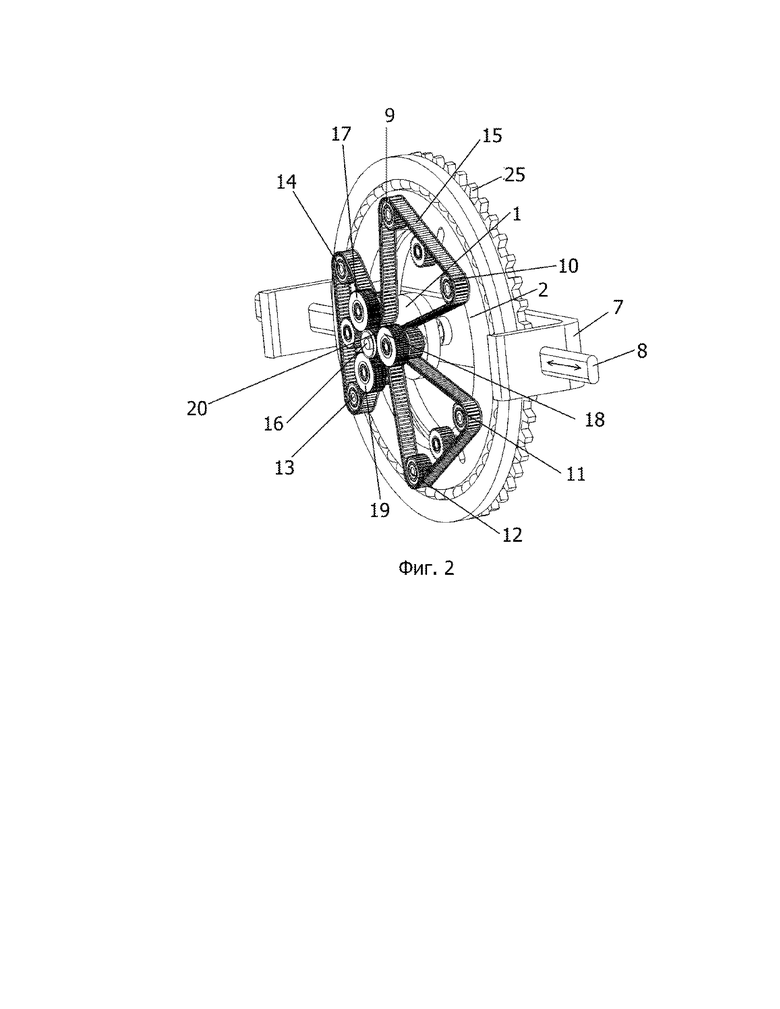
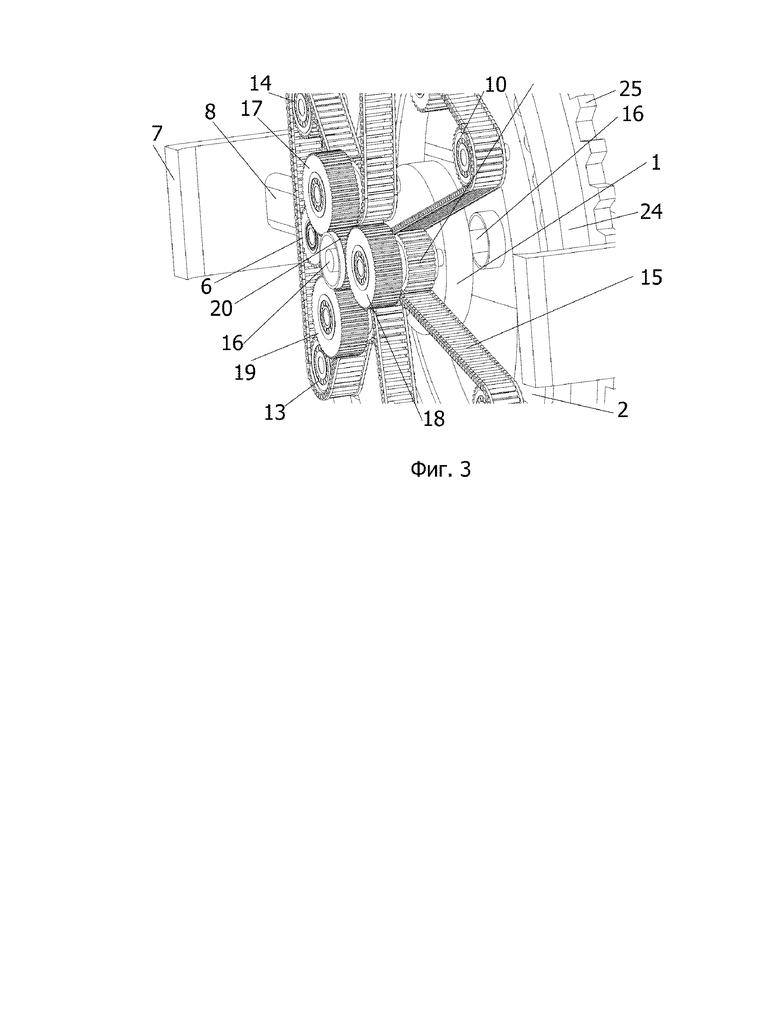
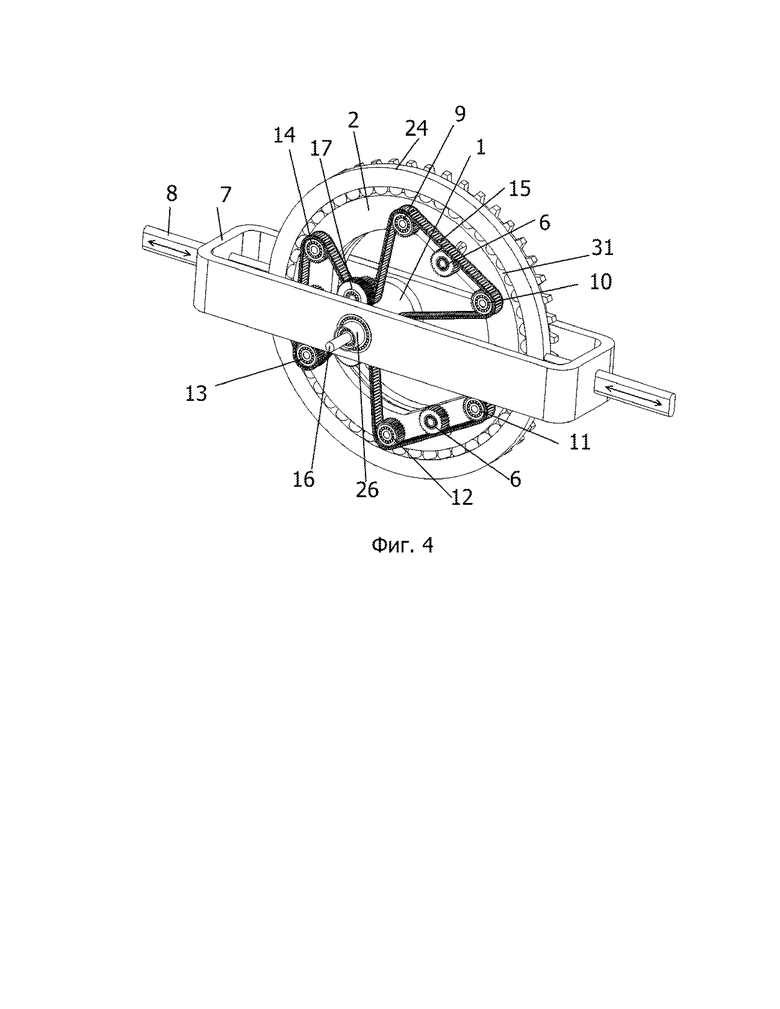
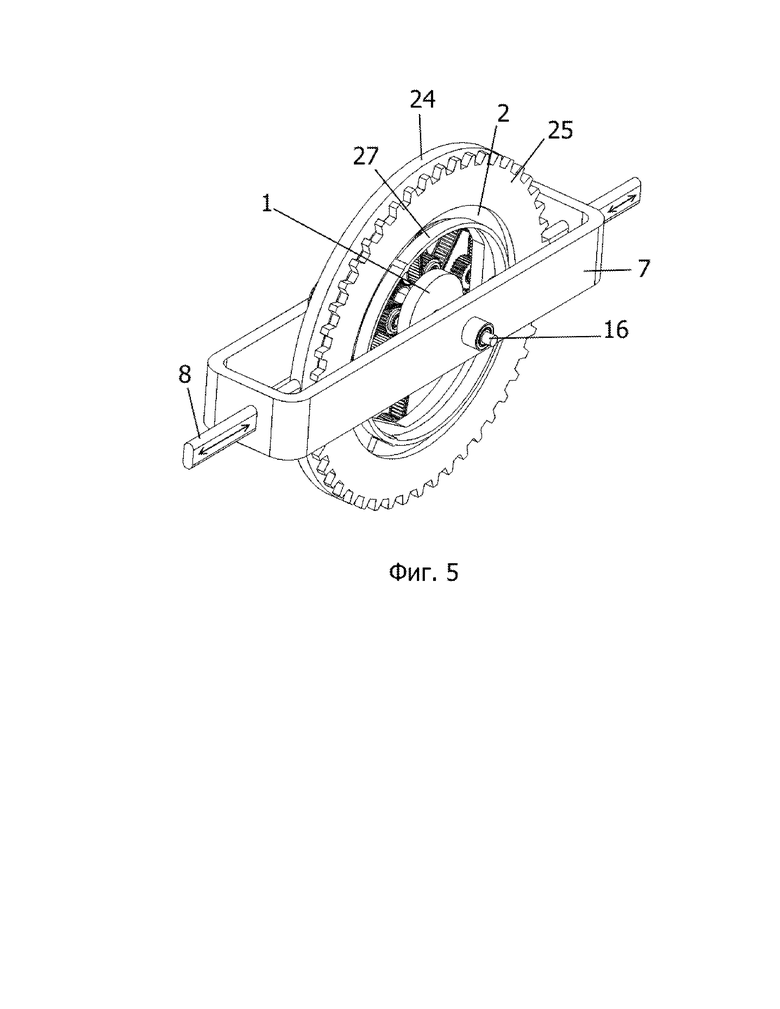
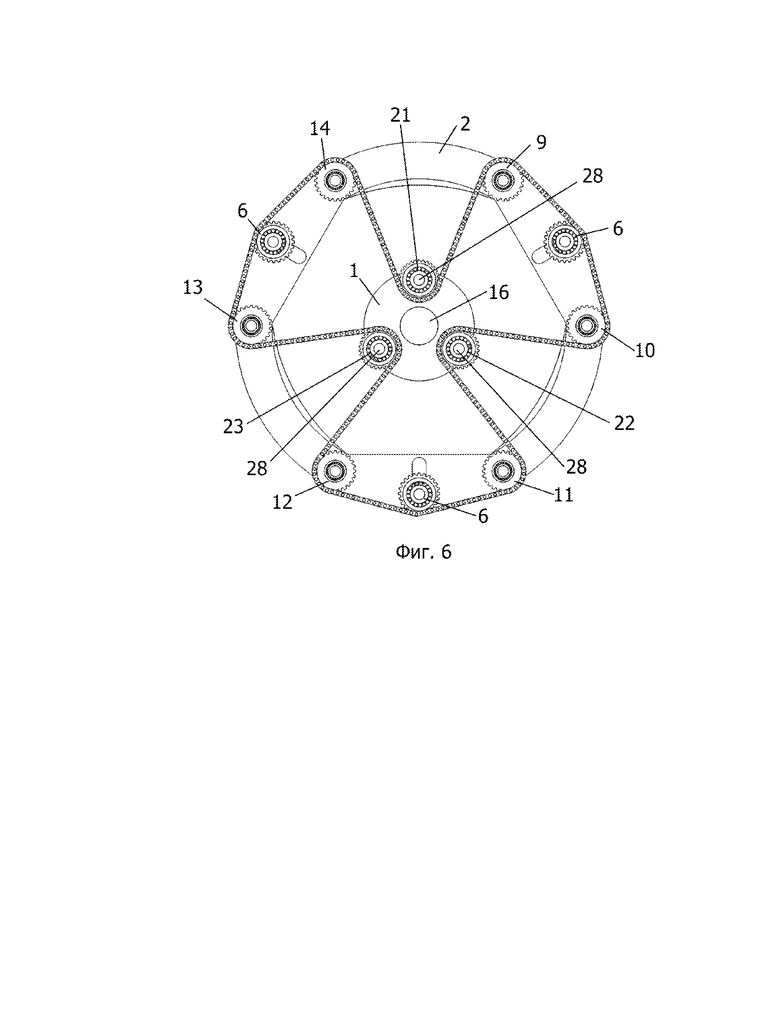
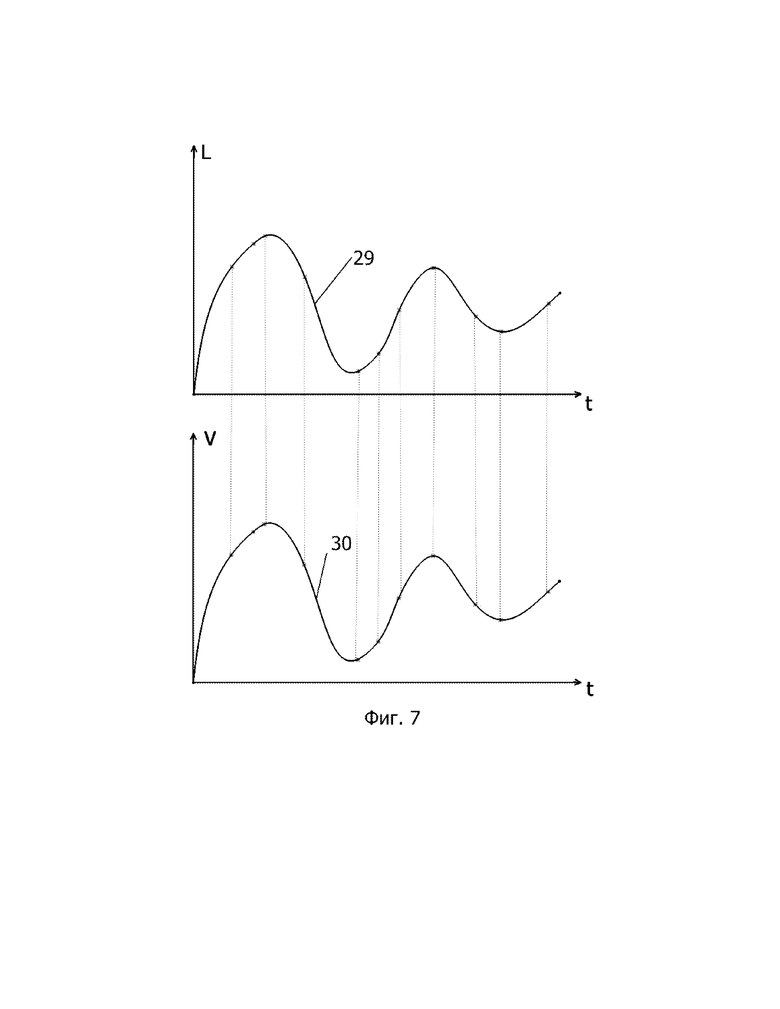
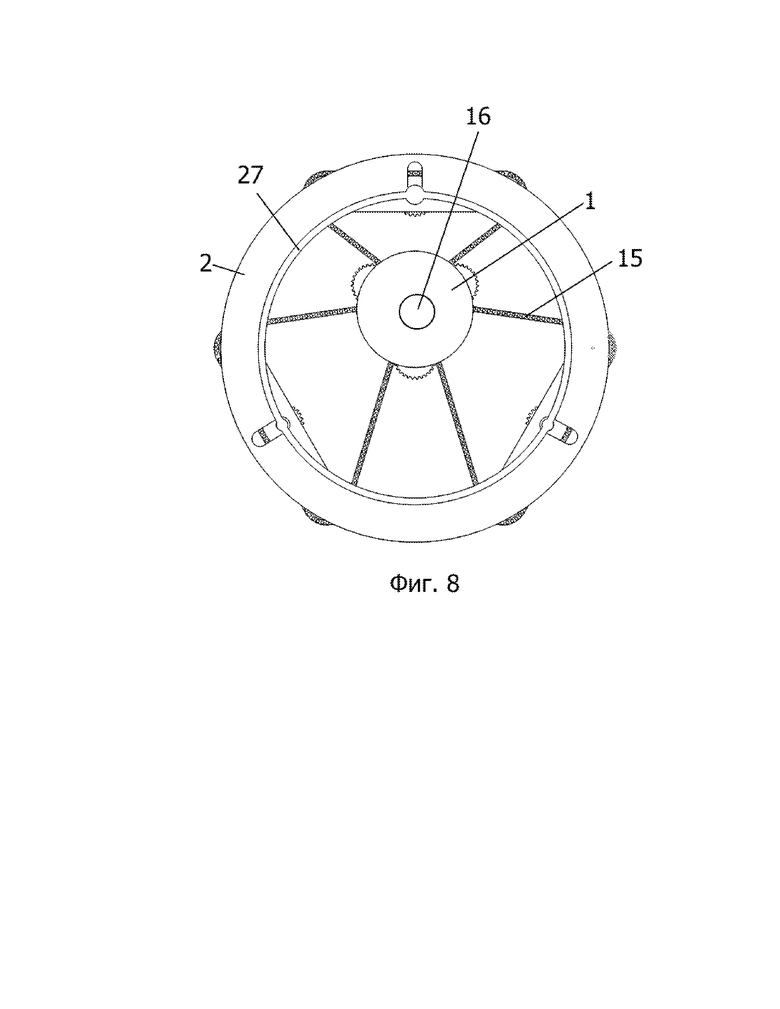
В примере конкретного исполнения механический аналог транзистора содержит универсальную самоцентрирующуюся систему, состоящую из внутреннего основания 1 и внешнего основания 2. На внутреннем основании 1 на осях 28 закреплены звездочки 21, 22 и 23 с возможностью вращения и шестерни 17, 18, 19. Шестерни 17, 18 и 19 передают вращающий момент на выходной вал 26 через шестерню 20, закрепленную на этом валу. На внешнем основании 2 закреплены звездочки 9, 10, 11, 12, 13, 14 с возможностью вращения. Звездочки внутреннего и внешнего оснований последовательно соединены замкнутой цепью 15. Звездочки 9-10, 11-12, 13-14 на фигуре 6 соответствуют звездочкам 3, 4, 5 на фигуре 9. Между звездочками 9-10, 11-12, 13-14 установлены звездочки натяжения 6, соединенные с пружиной 27. Основание 1 имеет входной вал 16, а основание 2 звездочку 25, на которые может подаваться вращающий момент от внешнего источника кинетической энергии вращения. Подшипник 31 разделяет внешнее основание 2 и кольцо 24. Управляющий ползун 8 соединен с кольцом 24 и предназначен для смещения внешнего основания 2 относительно внутреннего основания 1 и корпуса 7. График 29 на фигуре 7 представляет смещение L управляющего ползуна 8 во времени t. График 30 на фигуре 7 представляет изменение скорости V во времени t выходного вала 26. Мощность, передаваемая на выходной вал, пропорциональна мощности, прилагаемой к одному из оснований. Энергия, необходимая для управления управляющим ползуном 8, определяется силой, необходимой для преодоления сопротивления пружины 27. Универсальная самоцентрирующаяся система обладает функцией обгонной муфты. Вращающий момент от выходного вала 26 не передается на основания 1 и 2 универсальной самоцентрирующейся системы. Это позволяет вращаться основаниям с постоянной скоростью. При этом скорость на выходном валу 26 изменяется в соответствии со смещением управляющего ползуна 8.
На фигуре 1 представлено сечение механического аналога транзистора.
На фигуре 2 представлено сечение механического аналога транзистора, изометрический вид.
На фигуре 3 представлен увеличенный вид шестерен.
На фигуре 4 представлен механический аналог транзистора.
На фигуре 5 представлен механический аналог транзистора, вид со стороны пружины.
На фигуре 6 представлено сечение механического аналога транзистора при совпадении осей внутреннего и внешнего оснований.
На фигуре 7 представлены графики изменения скорости выходного вала и смещения управляющего элемента.
На фигуре 8 представлено положение пружины при несовпадении осей оснований.
На фигуре 9 представлена упрощенная универсальная система для доказательства возможности вращения.
На фигуре 10 представлены схемы поворота на различные углы универсальной самоцентрирующейся системы.
На фигуре 11 представлены графики изменения скоростей звездочек внешнего основания и цепи.
Изобретение относится к машиностроению, а более конкретно к передачам с гибкой связью. Механический аналог транзистора содержит универсальную самоцентрирующуюся систему, управляющий элемент, источник кинетической энергии вращения. Управляющий элемент изменяет расстояние между центрами вращения оснований универсальной самоцентрирующейся системы. Поступательное движение управляющего ползуна преобразовывается во вращательное движение выходного вала. Закон изменения входного линейного перемещения управляющего элемента совпадает с законом изменения скорости выходного вала. Кинетическая энергия выходного вала может быть намного больше энергии, затрачиваемой на преодоление сопротивления пружины управляющим элементом. Достигается создание механического аналога транзистора. 11 ил.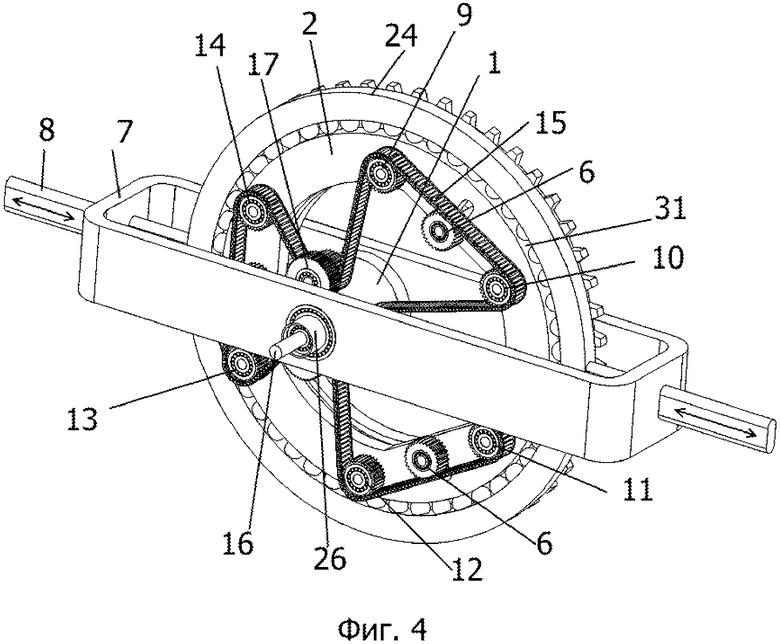
Механический аналог транзистора, содержащий управляющий элемент и источник кинетической энергии вращения, отличающийся тем, что в механическом аналоге транзистора использована универсальная самоцентрирующаяся система, в которой управляющий элемент изменяет расстояние между центрами вращения оснований универсальной самоцентрирующейся системы, источник кинетической энергии вращения соединен с одним из оснований, а усиленный сигнал управляющего элемента передают на шестерню выходного вала, которая имеет зубчатое зацепление с шестернями, закрепленными на звездочках, роликах или шкивах одного из оснований универсальной самоцентрирующейся системы.
| СПОСОБ БЕССТУПЕНЧАТОГО ИЗМЕНЕНИЯ ПЕРЕДАЧИ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391587C1 |
| RU 2013142690 A, 20.04.2014 | |||
| US 20080234094 A1, 25.09.2008 | |||
| RU 94037381 A1, 20.08.1996. | |||

