Изобретение относится к электромагнитным муфтам сцепления, электромагнитным тормозам.
Известен электромагнитный тормоз, состоящий из металлического диска, закрепленного на затормаживаемой оси, и электромагнита, расположенного с одной стороны диска и возбуждающего в нем вихревые токи, а для повышения тормозного момента диск выполнен биметаллическим. (Авт. св. СССР № 134327, кл. 21d3).
Недостатком этого тормоза является необходимость потребления электромагнитом энергии, большей, чем энергия на затормаживаемой оси при осуществлении полного торможения.
Целью изобретения является осуществление полного торможения затормаживаемой оси при потреблении электромагнитом энергии, меньшей, чем энергия на затормаживаемой оси.
Поставленная цель достигается тем, что в электромагнитном тормозе с универсальной самоцентрирующейся системой образована односторонняя обратная связь между входным и выходным валом универсальной самоцентрирующейся системы при использовании динамических свойств универсальной самоцентрирующейся системы. В электромагнитном тормозе с универсальной самоцентрирующейся системой, содержащем электромагнит или электродвигатель, электромагнит или электродвигатель создает вращающий момент между основаниями универсальной самоцентрирующейся системы, содержащей шестерни, закрепленные на общей оси со звездочками одного из оснований, шестерни имеют зубчатое зацепление с шестерней на выходном вале, вал затормаживаемого объекта соединен с внешним основанием и с выходным валом универсальной самоцентрирующейся системы.
Известна универсальная самоцентрирующаяся система, у которой используются только статические свойства. Универсальная самоцентрирующаяся система известна из изобретений: ( RU 2014106630 A , RU 2014106628 A, RU 2014106627 A, RU 2014106146 A, RU 2013157051 A, RU 2013154311 A, RU 2013153163A, RU 2013152649 A, RU 2013148896 A, RU 2013145988 A, RU 2013145987 A, RU 2013145253 A, RU 2013144445 A, RU 2013144444 A, RU 2013142690 A, RU 2013142204 A, RU 2013142203 A), DE 102013019629 A1, DE 102013019628 A1, DE 102013019627 A1, DE 102013019593 A1, DE 102013019592 A1, DE 102013019404 A1, DE 102013019402 A1, DE 102012018132 A1, DE 102012018131 A1, DE 102012017180 A1, DE 102012016380 A1, DE 102012016314 A1, DE 102012013308 A1, DE 102012012586 A1, DE 102012002076 A1, DE 102012001232 A1, DE 102012000316 A1).
Универсальная самоцентрирующаяся система имеет внешнее и внутреннее основания, расположенные в одной плоскости. Внешнее основание охватывает внутреннее основание. На каждом основании закреплены три или более роликов, звездочек или шестерней вращения. Число роликов на каждом основании одинаково. Каждый ролик может быть заменен на два ролика замены для того, чтобы использовать участок троса, ремня или цепи между роликами для натяжения. Воздействие силы натяжения на участок троса, цепи или ремня между роликами замены не влияет на свойства универсальной самоцентрирующейся системы. Способ натяжения ремня, троса или цепи известен из изобретения: (RU 2013147711 A). В приведенных изобретениях использовались статические свойства универсальной самоцентрирующейся системы.
Изобретение предназначено для возможности использования одного из динамических свойств универсальной самоцентрирующейся системы: совместное вращение внутреннего и внешнего оснований возможно даже при несовпадении осей вращения оснований. Это означает, что внутреннее и внешнее основания могут вращаться каждое относительно своих не совпадающих осей вращения при воздействии вращающего момента на одно из оснований.
Для использования динамических свойств универсальной самоцентрирующейся системы необходимо смещать относительно друг друга оси внутреннего и внешнего оснований. Способ смещения осей оснований универсальной самоцентрирующейся системы с угловым смещением оснований заключается в смещении одного или нескольких подвижных роликов, шестерней или звездочек оснований с помощью пружины и возвращении их в исходное состояние при нагрузке на выходной вал, при этом компенсацию длины цепи, ремня или троса осуществляют угловым сдвигом внутреннего основания относительно внешнего основания. Способ позволяет реализовывать, например, передачи с плавно изменяющимся передаточным отношением с начальной угловой скоростью выходного вала, равной нулю. Такие передачи не содержат трущихся вращающихся и переключающихся частей. Способ позволяет обходиться без дополнительных шестерней, роликов, звездочек натяжения.
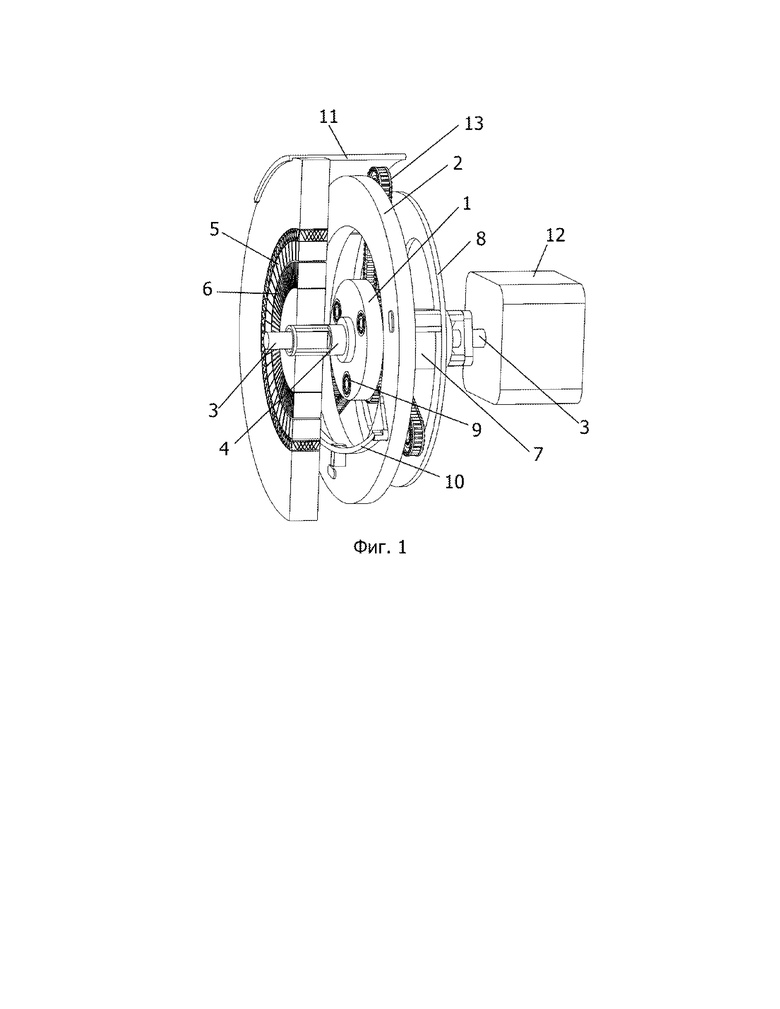
В примере конкретного исполнения в электромагнитном тормозе с универсальной самоцентрирующейся системой электромагнит создает вращающий момент между основаниями 1 и 2 универсальной самоцентрирующейся системы, вал затормаживаемого объекта 12 соединен с внешним основанием и с выходным валом 3 универсальной самоцентрирующейся системы. Вал затормаживаемого объекта 12 совпадает с выходным валом 3. Электромагнитный тормоз с универсальной самоцентрирующейся системой содержит электромагнит или электродвигатель с ротором 6, закрепленный на втулке 4, и статор 5, закрепленный на корпусе 11. Универсальная самоцентрирующаяся система содержит внутреннее основание 1 и внешнее основание 2. Втулка 4 закреплена на внутреннем основании 1. На внешнем основании 2 закреплены звездочки 14, 15, 16 с возможностью вращения. На внутреннем основании 1 закреплены оси звездочек 17, 18, 19 в подшипниках 9, при этом оси звездочек 17, 18, 19 имеют возможность вращения. На одной оси со звездочками 17, 18, 19 закреплены шестерни 20, 21, 22, имеющие зубчатое зацепление с шестерней 23, закрепленной на выходном вале 3. Выходной вал 3 закреплен с помощью подшипника 24 на внутреннем основании 1. Оси звездочек 15 и 16 подпружинены пружиной 10. Двигатель 12 обозначает источник вращающего момента, который подвергается торможению. Кольцо 8 закреплено на внешнем основании 2. Втулка 7 закреплена на кольце 8. Вал 3 и втулка 7 соединены между собой и одновременно получают вращающий момент от двигателя 12. Замкнутая цепь 13 последовательно соединяет звездочки внешнего и внутреннего основания.
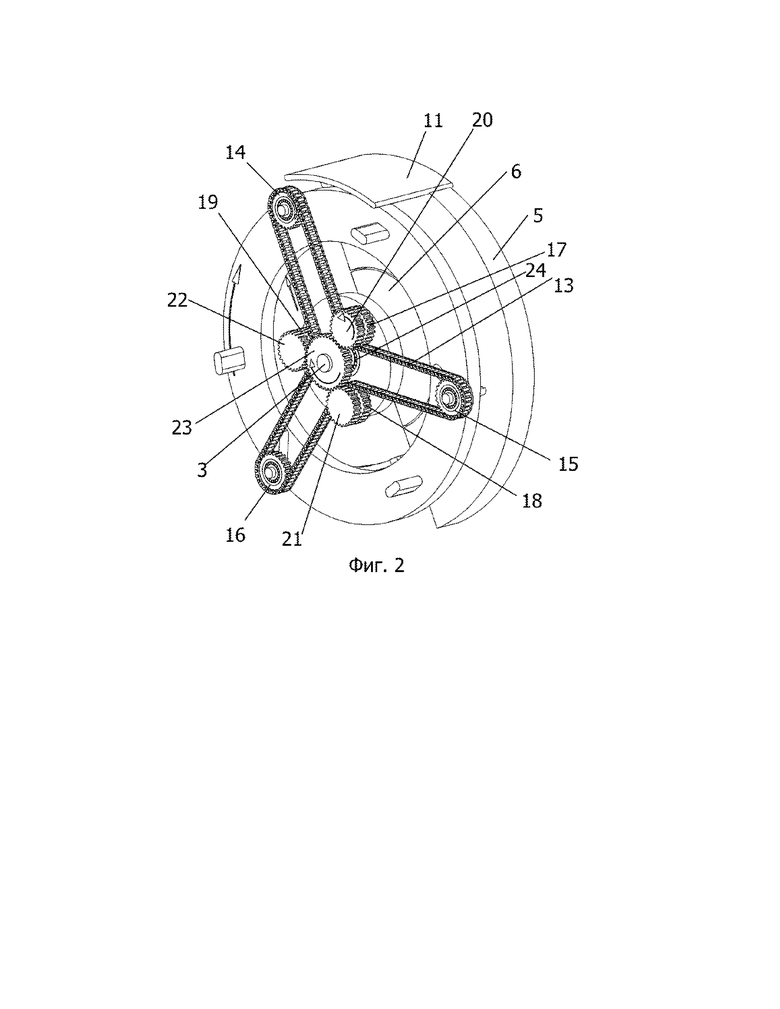
Вращающий момент от двигателя 12 передается на внешнее основание 2 и вал 3. Если электромагнит выключен, то между внутренним и внешним основанием нет сил противодействия, и основания вращаются с одинаковой скоростью. При этом звездочки 15 и 16 находятся в положении, показанном на фиг. 2 и 3. Угловая скорость вала 3 совпадает со скоростями оснований 1 и 2. Шестерня 23 вместе с валом 3 остаются неподвижными относительно основания 1. Цепь 13 не перемещается вдоль своего периметра и линейные скорости 25 и 26 цепи 13 равны нулю. При этом геометрические центры оснований 1 и 2 совпадают.
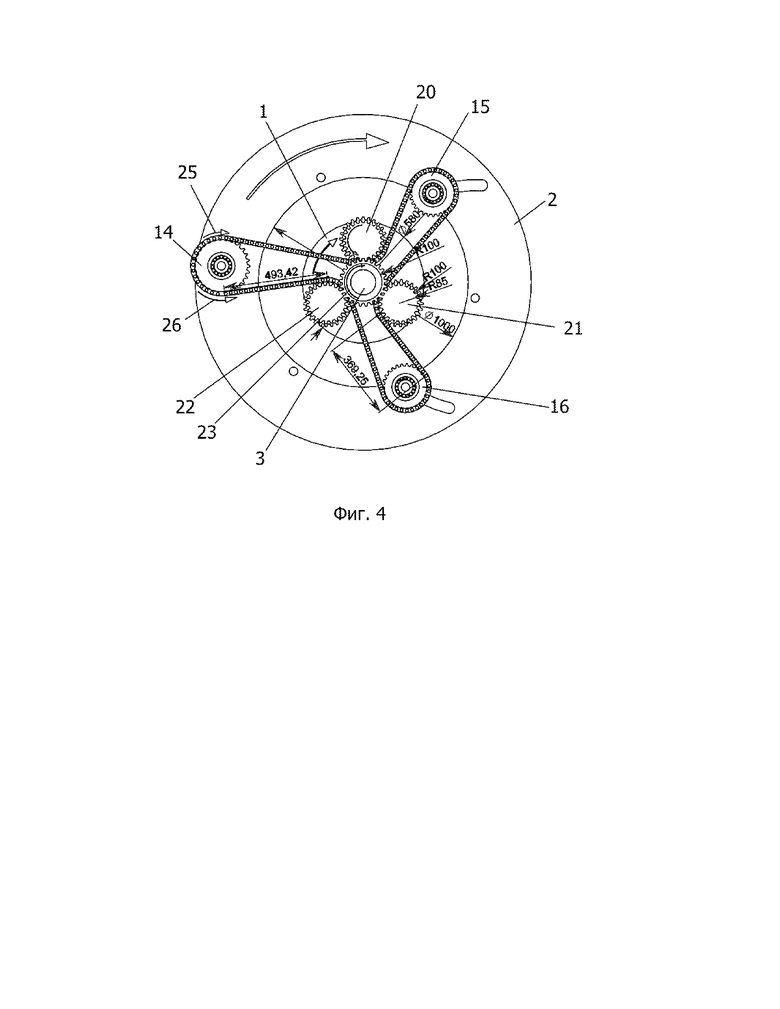
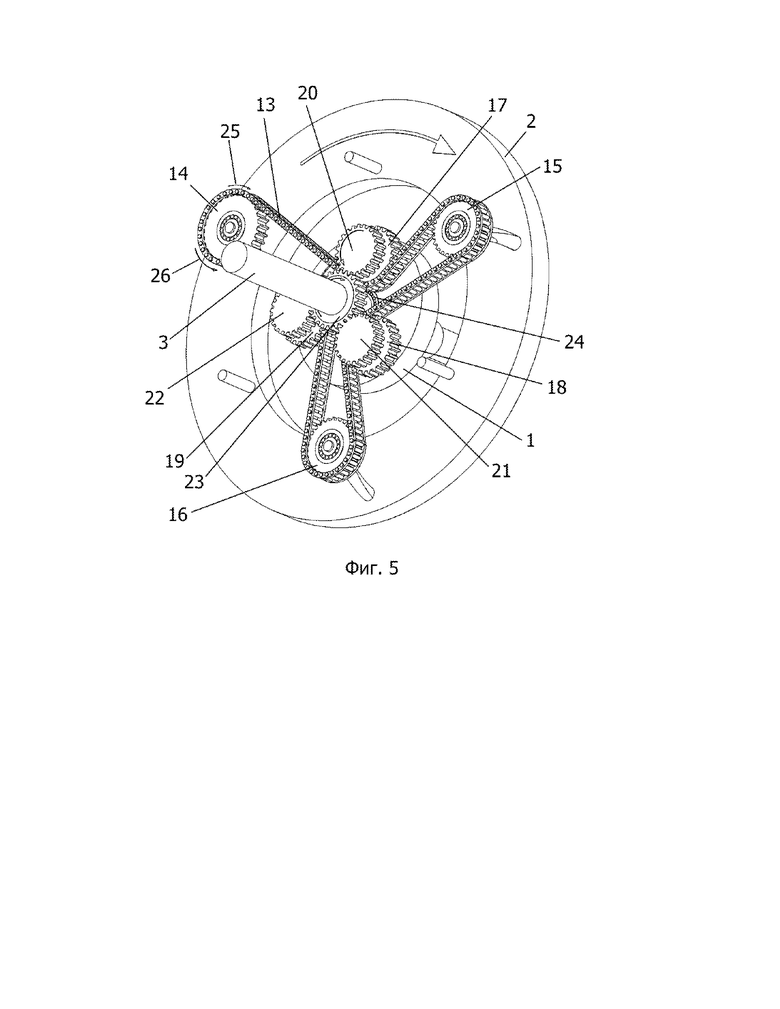
Если электромагнит включен, то на внутреннее основание действует вращающий момент, создаваемый электромагнитом, относительно внешнего основания. Звездочки 15 и 16 переместятся в положение, показанное на фиг. 4-6, если электромагнит или двигатель создают достаточное усилие для преодоления сопротивления пружины 10. Геометрический центр основания 2 смещается относительно геометрического центра основания 1. Избыточная длина цепи 13 вследствие уменьшения расстояния между звездочками компенсируется за счет углового сдвига между основаниями 1 и 2. При этом цепь 13 стремится к перемещению вдоль своего периметра. Шестерня 23 стремится к угловому вращению относительно внутреннего основания 1. Составляющая линейной скорости 26 будет препятствовать вращающему моменту двигателя 12, линейная составляющая скорости 25 которого представлена на фиг. 4. При этом обратное воздействие от вращающего момента двигателя 12 на перемещение звездочек 15 и 16 вместе с пружиной 10 отсутствует. Это явление означает включение обратной связи на затормаживаемый вал по аналогии с отрицательной обратной связью, широко применяемой в радиотехнических схемах. В результате получаем, что для торможения вала с кинетической энергией "P" требуется только энергия "p" электромагнита, необходимая для преодоления силы пружины 10. При этом "p" < "P", остальная энергия торможения рассеивается на деталях электромагнитного тормоза.
Величину перемещения цепи 13 можно оценить из данных, представленных на фиг. 4. При повороте оснований 1 и 2 на угол 120 градусов, звездочка 16 займет положение звездочки 14. Отрезок цепи 369,25 удлинится до величины 493,42. За полный оборот оснований 1 и 2 цепь 13 переместится на величину (493,42 - 369,25)*3 = 124,17*3 =372,51. При радиусе шестерни 23, равном 100, звездочки 17, равном 100, а шестерни 20, равном 85, шестерня 23 вместе с валом 3 за один оборот оснований 1 и 2 должны повернуться на 372,51/(85*2*3,14) = 4,38 оборота. Это означает, что принуждающий к остановке двигателя 12 вращающий момент имел бы угловую скорость в 4,38 раза большую, чем угловая скорость самого двигателя 12, но это было бы при мгновенном перемещении звездочек 15 и 16 в положение, указанное на фиг. 4-6. На самом деле происходит постепенное снижение скорости двигателя 12. Любой малейший сдвиг звездочек 15 и 16 в момент времени ∆t1 приводит к снижению скорости двигателя 12 на величину ∆υ1. И так для каждого следующего момента времени до полной остановки двигателя 12. При этом затрачиваемая энергия для торможения значительно меньше энергии затормаживаемого вала. Это стало возможным благодаря включению обратной связи в универсальной самоцентрирующейся системе.
На фиг. 1 представлен электромагнитный тормоз с универсальной самоцентрирующейся системой.
На фиг. 2 представлена универсальная самоцентрирующаяся система электромагнитного тормоза при совпадении осей оснований.
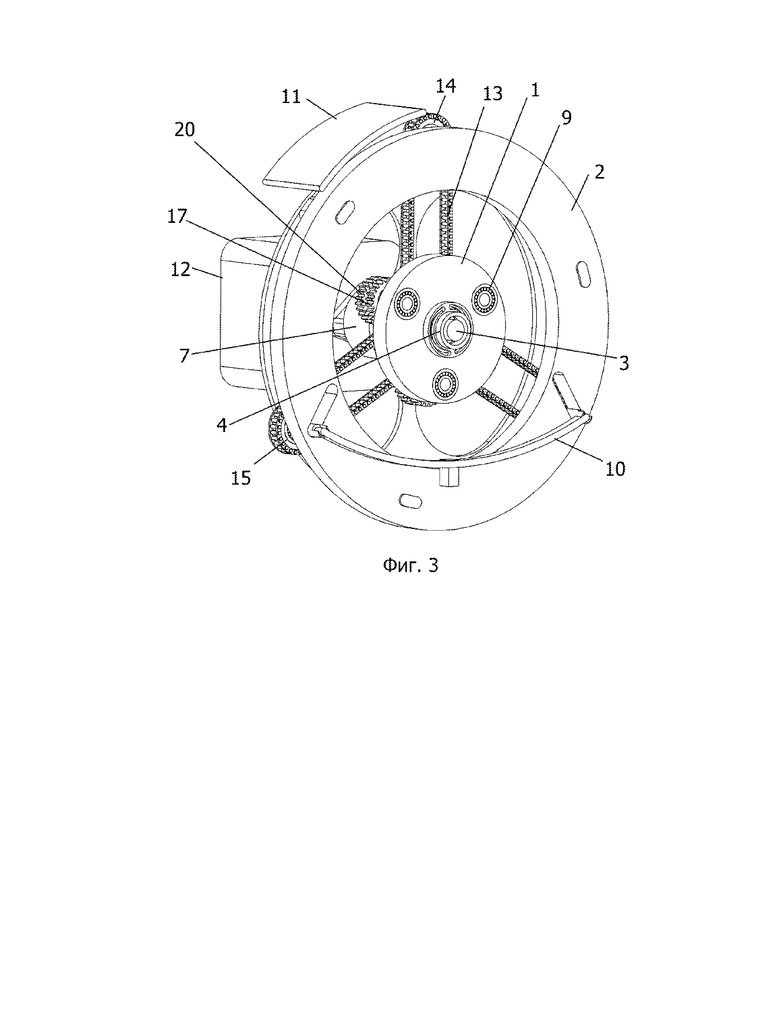
На фиг. 3 представлено сечение электромагнитного тормоза со стороны пружин при совпадении осей оснований универсальной самоцентрирующейся системы.
На фиг. 4 представлены данные для ориентировочной оценки величины смещения цепи за один оборот универсальной самоцентрирующейся системы.
На фиг. 5 представлена универсальная самоцентрирующаяся система электромагнитного тормоза при несовпадении осей оснований.
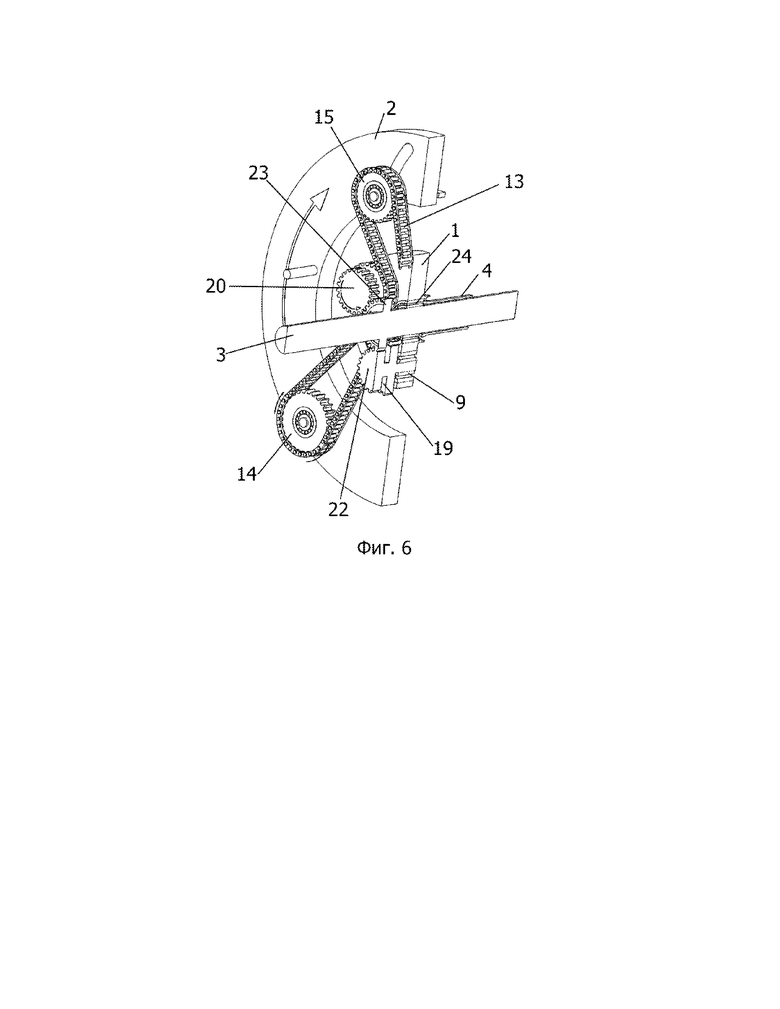
На фиг 6. представлено сечение вдоль оси универсальной самоцентрирующейся системы.
Изобретение относится к области машиностроения. В электромагнитном тормозе используются динамические свойства универсальной самоцентрирующейся системы, которая позволяет создать одностороннюю обратную связь с входным и выходным валом универсальной самоцентрирующейся системы. Воздействие выходного вала приводит к затормаживанию объекта, а обратное воздействие на универсальную самоцентрирующуюся систему через выходной вал отсутствует. Электромагнитный тормоз с универсальной самоцентрирующейся системой не содержит трущихся и переключающихся деталей. Достигается осуществление полного торможения затормаживаемой оси при потреблении электромагнитом энергии меньшей, чем энергия на затормаживаемой оси. 6 ил.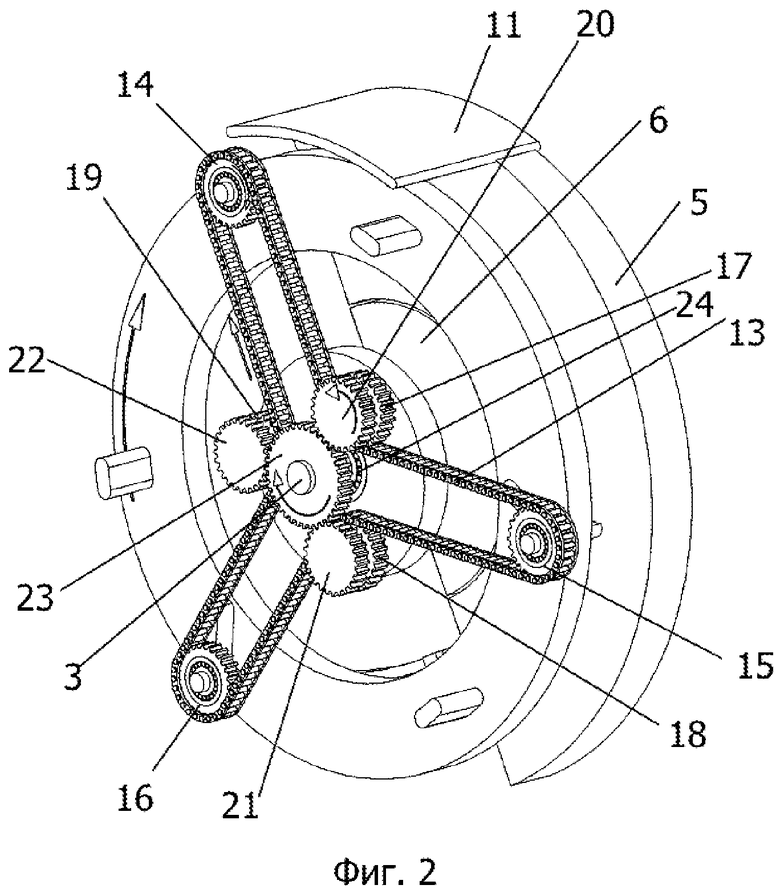
Электромагнитный тормоз с универсальной самоцентрирующейся системой, содержащий электромагнит или электродвигатель, отличающийся тем, что электромагнит или электродвигатель создает вращающий момент между основаниями универсальной самоцентрирующейся системы, содержащей шестерни, закрепленные на общей оси со звездочками одного из оснований, шестерни имеют зубчатое зацепление с шестерней на выходном вале, вал затормаживаемого объекта соединен с внешним основанием и с выходным валом универсальной самоцентрирующейся системы.
| RU 2013147711 A, 10.05.2015 | |||
| Электромагнитная муфта тормоза | 1987 |
|
SU1569457A1 |
| КОМПЕНСАЦИОННАЯ МУФТА | 1993 |
|
RU2057261C1 |
| Упругокомпенсационная муфта | 1988 |
|
SU1622673A1 |
| US 4266409 A, 12.05.1981. | |||

