Изобретение относится к горной промышленности и предназначено для автоматизации процесса управления проходческо-очистными комбайнами, в частности для автоматического управления приводами механизма перемещения и переносного вращения резцовых дисков проходческо-очистных комбайнов с планетарно-дисковыми исполнительными органами типа «Урал».
Известен способ управления проходческо-очистным комбайном, обеспечивающий регулирование нагрузки на приводных двигателях исполнительных органов путем изменения скорости подачи комбайна на забой [1]. Управление скоростью подачи осуществляется вручную посредством изменения расхода рабочей жидкости через регулятор потока гидросистемы механизма хода комбайна и регулирования частоты вращения выходных валов гидромоторов механизма хода комбайна. Оценка величины нагрузок приводных двигателей осуществляется машинистом по установленным в кабине комбайна приборам индикации, информация на которые передается от датчиков тока и приборов коммутации.
К недостаткам известного способа относят низкий уровень автоматизации управления, что зачастую обусловливает работу комбайна в режимах, отличных от нормативных (перегрузка или неполное использование мощности приводов). Отсутствие информации о перемещении и скорости подачи выемочной машины, а также устройств управления, изменяющих частоту относительного и переносного вращения резцовых дисков, не позволяет обеспечить разрушение горного массива с рациональным отношением шага резания к толщине стружки, минимизировав тем самым удельные энергозатраты процесса разрушения породного массива.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ автоматического управления горным комбайном с использованием системы САДУ-2, принятый за прототип [2]. В аппаратуре САДУ-2 заложено два контура регулирования: по току главного двигателя выемочной машины и по скорости ее подачи на забой, причем первый контур имеет приоритет над вторым. Согласно способу задают значения тока, потребляемого двигателем породоразрушающего исполнительного органа комбайна, и скорость подачи комбайна на забой.
Если ток нагрузки главного приводного двигателя породоразрушающего исполнительного органа комбайна Iфакт не превышает заданного значения Iзад, то в этом случае работает контур регулирования скорости подачи комбайна на забой. Фактическое значение скорости подачи Vфакт фиксируется датчиком скорости и сравнивается на элементе сравнения с величиной заданного значения Vзад скорости подачи. В случае превышения заданного значения скорости подачи Vзад над ее фактическим значением Vфакт, сигнал элемента сравнения преобразуется в сигнал, который смещает положение золотника в сторону увеличения производительности гидронасоса, который в свою очередь увеличивает частоту вращения вала гидромотора механизма хода, следовательно, возрастает и фактическая скорость подачи Vфакт комбайна. Это увеличение происходит до тех пор, пока фактическая скорость подачи не сравняется с заданной (Vфакт=Vзад). При превышении скорости подачи выше заданного уровня золотник перемещается в сторону снижения производительности насоса, а значит и уменьшения скорости подачи комбайна.
При перегрузке главного приводного двигателя породоразрушающего исполнительного органа выемочной машины в работу вступает контур управления нагрузкой на двигателе. При этом сигнал Iфакт датчика нагрузки превышает величину задающего сигнала Iзад на элементе сравнения, в результате чего сигнал на выходе этого элемента выключает контур регулирования скорости подачи комбайна из процесса управления. Электромагнит перемещает золотник в сторону снижения производительности насоса, уменьшая тем самым скорость подачи комбайна, до тех пор, пока нагрузка на главный двигатель привода породоразрушающего исполнительного органа не достигнет заданного значения. Когда это произойдет, в работу снова включается контур регулирования скорости подачи комбайна.
Признаки прототипа, совпадающие с существенными признаками заявляемого способа, - контроль тока нагрузки главного двигателя исполнительного органа комбайна, при котором задают максимально допустимое значение тока, потребляемого двигателем исполнительного органа комбайна, и скорость подачи комбайна на забой; сравнивают заданное значение тока с фактическим значением, определяемым посредством датчика тока, если фактическое значение тока нагрузки двигателя исполнительного органа больше заданного, снижают скорость подачи комбайна на забой, если фактическое значение тока нагрузки двигателя исполнительного органа меньше заданного, то определяют фактическое значение скорости подачи комбайна на забой и сравнивают Vфакт с заданным значением скорости подачи Vзад; при несовпадении фактического значения скорости подачи комбайна Vфакт с заданным значением Vзад регулируют скорость подачи комбайна.
К недостаткам известного способа управления, принятого за прототип, относят отсутствие возможности регулирования величины шага резания и обеспечения рационального отношения шага резания к толщине стружки при разрушении горного массива исполнительным органом комбайна. Указанный недостаток не позволяет минимизировать удельные энергозатраты процесса разрушения горного массива и обусловливает повышение количества мелких пылевидных фракций в продуктах отбойки. Использование системы САДУ-2 затруднено на комбайнах с разветвленной, многодвигательной кинематической схемой привода исполнительного органа, так как предусмотрен контроль фактического значения тока только главного двигателя исполнительного органа, при этом нагрузка на вспомогательных приводах исполнительного органа не контролируется.
Задачей изобретения является реализация способа автоматического управления приводами механизма перемещения и переносного вращения резцовых дисков проходческо-очистных комбайнов с планетарно-дисковыми исполнительными органами, позволяющего обеспечить рациональные значения параметров резания и снизить удельные энергозатраты процесса разрушения горного массива.
Поставленная задача была решена за счет того, что в известном способе управления горным комбайном с планетарно-дисковым исполнительным органом, основанном на контроле тока нагрузки главного двигателя исполнительного органа комбайна, заключающемся в том, что задают максимально допустимое значение тока, потребляемого главным двигателем исполнительного органа комбайна, и скорость подачи комбайна на забой, сравнивают заданное значение тока с фактическим значением, определяемым посредством датчика тока, если фактическое значение тока нагрузки главного двигателя исполнительного органа больше заданного, снижают скорость подачи комбайна на забой, если фактическое значение тока нагрузки главного двигателя исполнительного органа меньше заданного, определяют фактическое значение скорости подачи комбайна на забой и сравнивают Vфакт с заданным значением скорости подачи Vзад и при несовпадении фактического значения скорости подачи комбайна Vфакт с заданным значением Vзад регулируют скорость подачи комбайна, согласно изобретению контроль токов нагрузки осуществляют на всех приводных двигателях породоразрушающего исполнительного органа комбайна, при этом регулируют скорость подачи комбайна при превышении тока нагрузки хотя бы на одном приводном двигателе, при достижении заданной скорости подачи осуществляют регулирование частоты переносного вращения резцовых дисков с целью изменения шага резания и обеспечения минимальных удельных энергозатрат процесса разрушения забоя при рациональном отношении шага резания к толщине стружки.
В предпочтительном варианте выполнения способа для регулирования частоты переносного вращения резцовых дисков используют тиристорный преобразователь частоты питающего напряжения, а для регулирования скорости подачи комбайна на забой используют сервопривод регулятора потока гидросистемы привода хода комбайна.
Признаки заявляемого технического решения, отличительные от прототипа - контроль токов нагрузки осуществляют на всех приводных двигателях породоразрушающего исполнительного органа комбайна; регулирование скорости подачи комбайна осуществляют при превышении тока нагрузки хотя бы на одном приводном двигателе; при достижении заданной скорости подачи осуществляют изменение шага резания посредством регулирования частоты переносного вращения резцовых дисков; для регулирования частоты переносного вращения резцовых дисков используют тиристорный частотный преобразователь; для регулирования скорости подачи комбайна на забой используют сервопривод регулятора потока гидросистемы привода хода комбайна.
Благодаря контролю токов на всех приводных двигателях не допускается перегрузка приводных двигателей исполнительных органов комбайна. Регулирование скорости подачи комбайна осуществляется при превышении тока нагрузки хотя бы на одном приводном двигателе.
Регулированием частоты переносного вращения планетарно-дисковых исполнительных органов при заданной скорости подачи комбайна реализуется изменение значения шага резания и обеспечивается рациональное отношение шага резания к толщине стружки, что позволяет снизить удельные энергозатраты при разрушении горного массива резцами проходческо-очистного комбайна.
Благодаря использованию тиристорного преобразователя частоты питающего напряжения реализуется управление приводом переносного вращения планетарно-дискового исполнительного органа проходческо-очистного комбайна, а регулирование скорости подачи комбайна осуществляется путем изменения расхода жидкости в гидросистеме механизма хода через регулятор потока, оснащенный сервоприводом.
Предлагаемый способ поясняется чертежами, представленными на фиг. 1 и 2.
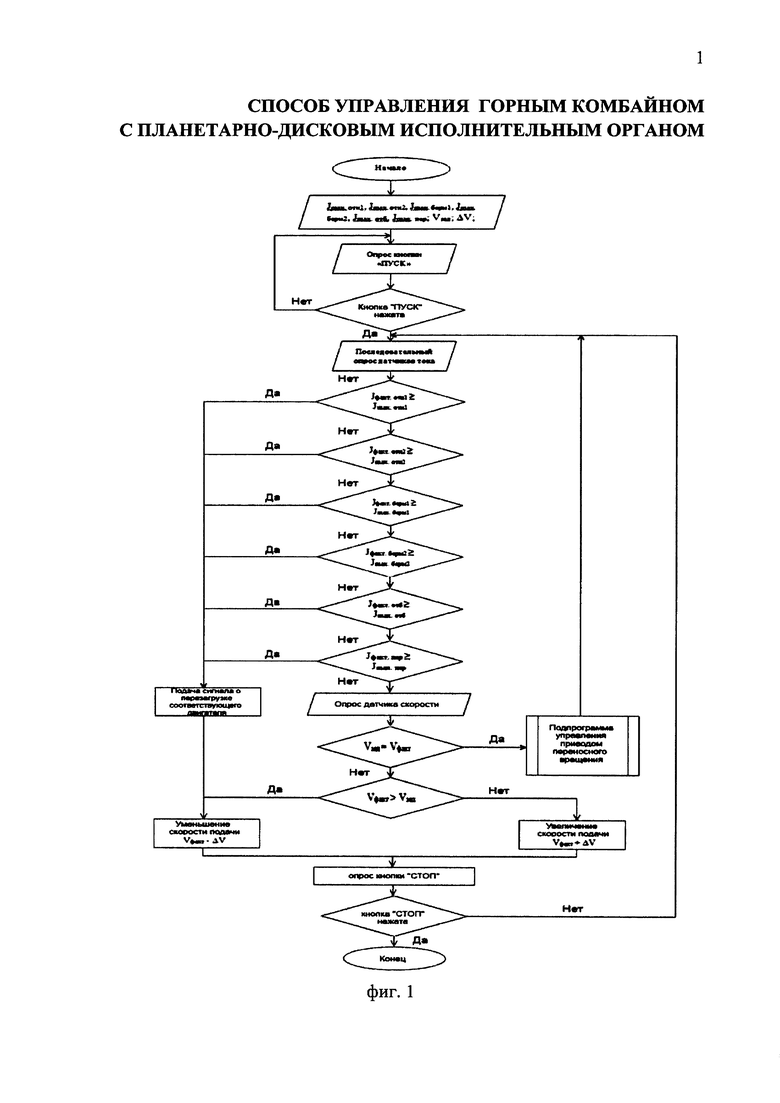
На фиг. 1 показана блок-схема автоматического способа управления проходческо-очистным комбайном с планетарно-дисковым исполнительным органом.
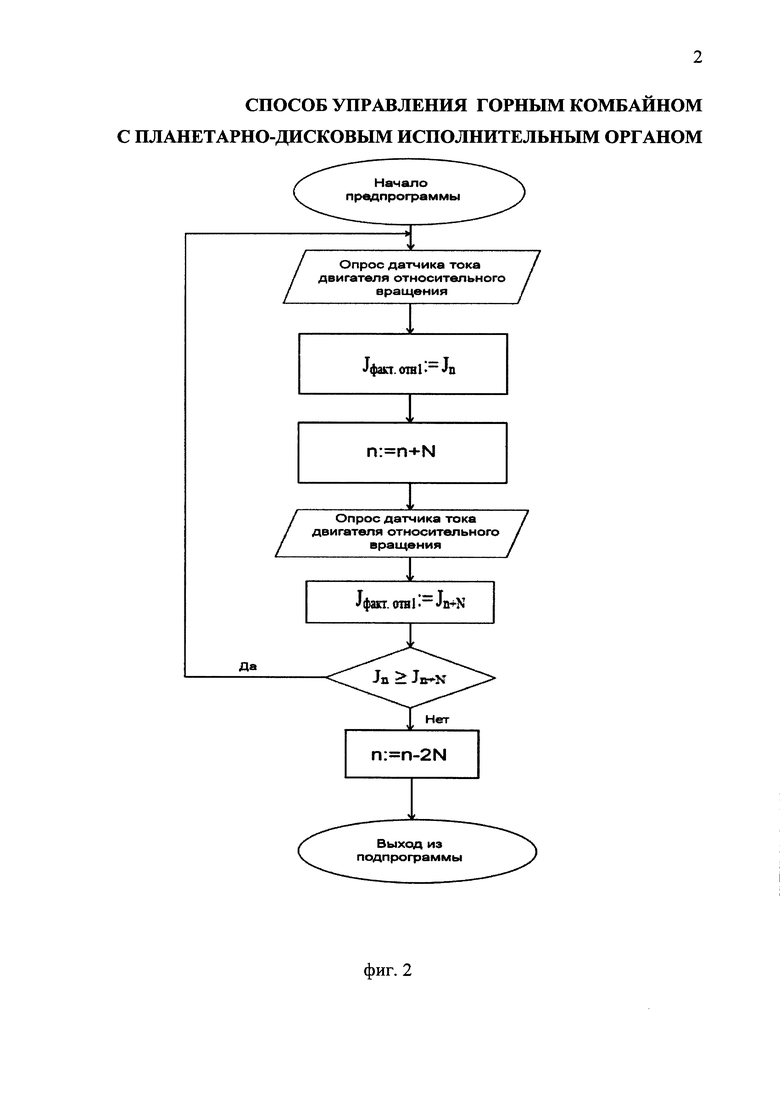
На фиг. 2 показана блок-схема подпрограммы управления приводом переносного вращения.
Способ заключается в установке на проходческо-очистном комбайне датчиков тока, регистрирующих значения токов, потребляемых двигателями главных и вспомогательных исполнительных органов комбайна, датчика скорости для измерения значения скорости подачи комбайна на забой, аналого-цифрового преобразователя, бортового компьютера и устройств управления - тиристорного преобразователя частоты питающего напряжения для регулирования частоты вращения привода переносного движения резцовых дисков и сервопривода регулятора потока гидросистемы механизма хода.
Алгоритм предлагаемого автоматического способа управления проходческо-очистным комбайном с планетарно-дисковым исполнительным органом, например, комбайна «Урал-20Р» описывается блок-схемой, представленной на фиг. 1.
В бортовой компьютер комбайна вводят максимально допустимые значения токов нагрузки двигателей породоразрушающих исполнительных органов: двигателей относительного движения Imax.отн.1 и Imax.отн.2; двигателей бермовых исполнительных органов Imax.берм.1 и Imax.берм.2; двигателя отбойного устройства Imax.отб.; двигателя переносного вращения Imax.пер. Задают скорость подачи добычной машины на забой Vзад и начальную частоту вращения вала двигателя переносного вращения дисков n. При нажатии кнопки «ПУСК» и запуске автоматического управления бортовой компьютер комбайна начинает последовательный опрос датчиков тока с целью определения фактических значений токов нагрузки двигателей породоразрушающих исполнительных органов (двигателей относительного движения Iфакт.отн.1 и Iфакт.отн.2; двигателей бермовых исполнительных органов Iфакт.берм.1 и Iфакт.берм.2; двигателя отбойного устройства Iфакт.отб.; двигателя переносного вращения Iфакт.пер.) и сравнения их с установленными максимально допустимыми значениями. В случае превышения фактического значения тока нагрузки двигателя какого-либо исполнительного органа над заданным, на сервопривод регулятора потока гидросистемы механизма хода подают управляющий сигнал и осуществляют дискретное уменьшение скорости подачи комбайна на забой на величину ΔV. На дисплее машиниста отображается информация о перегрузке соответствующего двигателя.
Если фактические значения токов нагрузки приводных двигателей меньше максимально допустимых, то бортовой компьютер осуществляет опрос датчика скорости, определение фактического значения скорости подачи комбайна на забой Vфакт и сравнение Vфакт с заданным значением скорости подачи Vзад. В случае если фактическое значение скорости подачи комбайна Vфакт больше (меньше) заданного значения Vзад, то на сервопривод регулятора потока гидросистемы механизма хода комбайна подается управляющий сигнал и осуществляется дискретное уменьшение (увеличение) скорости подачи комбайна на забой на величину ΔV.
При достижении заданной скорости подачи комбайна (Vфакт=Vзад) реализуется подпрограмма управления двигателем переносного вращения. Изменение частоты переносного вращения резцовых дисков осуществляется дискретно с целью изменения шага резания, что позволяет минимизировать удельные энергозатраты процесса разрушения массива планетарно-дисковым исполнительным органом посредством обеспечения рационального отношения шага резания к толщине стружки при заданной скорости подачи.
Величина удельных энергозатрат процесса разрушения горного массива планетарно-дисковым исполнительным органом определяется по формуле

где Hw - удельные энергозатраты процесса разрушения горного массива, кВт⋅ч/м3; Iфакт - ток нагрузки приводных двигателей, A; U - напряжение питающей сети, В; cosϕ - коэффициент мощности; Fи.о. - площадь забоя, обрабатываемая планетарно-дисковым исполнительным органом, м2; Vфакт - фактическая скорость подачи комбайна на забой, м/час.
Учитывая, что в формуле (1) изменением параметров U и cosϕ можно пренебречь, Fи.о. является величиной постоянной, Vфакт=Vзад=const, то регулирование величины удельных энергозатрат возможно посредством изменения фактического тока, потребляемого наиболее мощными и нагруженными двигателями, - двигателями относительного вращения резцовых дисков [3]. Минимизация тока нагрузки двигателей относительного движения возможна за счет обеспечения рационального отношения шага резания к толщине стружки (t/h), что достигается изменением шага резания посредством регулирования частоты переносного вращения резцовых дисков.
В начале работы подпрограммы осуществляется опрос датчика тока двигателя относительного вращения резцовых дисков и определение тока нагрузки Iфакт.отн.1. Текущему значению Iфакт.отн.1 присваивается индекс In. Управление приводом переносного вращения планетарно-дискового исполнительного органа проходческо-очистного комбайна реализуется посредством использования тиристорного преобразователя частоты. В процессе регулирования фактическая частота переносного вращения резцовых дисков n дискретно увеличивается на заданную величину N. Опрос датчика тока позволяет определить фактическое значение тока In+N. Пока выполняется условие In>In+N, посредством использования тиристорного преобразователя частота переносного вращения резцовых дисков дискретно увеличивается. В случае увеличения тока нагрузки двигателя относительного вращения (In>In+N), частота переносного вращения резцовых дисков дискретно уменьшается на величину 2N. Достижение минимальных (или близких к минимальным) значений тока Iфакт.отн. позволяет минимизировать удельные энергозатраты процесса разрушения горного массива планетарно-дисковым исполнительным органом. Максимальная (минимальная) частота переносного вращения n ограничена характеристиками используемого тиристорного преобразователя.
Преимущество предлагаемого способа состоит в том, что возможность реализации автоматического управления приводами механизма перемещения и переносного вращения резцовых дисков проходческо-очистных комбайнов с планетарно-дисковыми исполнительными органами обеспечивает рациональные значения параметров резания и снижает удельные энергозатраты процесса разрушения горного массива.
Источники информации
1. Проходческо-очистные комбайновые комплексы калийных рудников: учебное пособие. Ч. 2 / ОАО "Уралкалий"; ЗАО "НИПО" ПГТУ; Под ред. Б.В. Васильева. - Пермь: ЗАО "НИПО". 1999. - 425 с.
2. Сажин Р.А. Автоматизация технологических процессов горного производства: учебное пособие / Р.А. Сажин; Пермский государственный технический университет - Пермь: Изд-во ПГТУ, 2009. - 197 с.
3. Чекмасов Н.В., Шишлянников Д.И., Трифанов М.Г. Оценка эффективности процесса разрушения калийного массива резцами исполнительных органов комбайнов «Урал-20Р» // Известия высших учебных заведений. Горный журнал. 2013. №6. - С. 103-107.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган проходческо-очистного комбайна | 2021 |
|
RU2755193C1 |
| Исполнительный орган горного комбайна | 2021 |
|
RU2780787C1 |
| Исполнительный орган проходческо-очистного комбайна | 2024 |
|
RU2828781C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2010 |
|
RU2460882C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1998 |
|
RU2159851C2 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2016 |
|
RU2630839C1 |
| Исполнительный орган горного комбайна | 2022 |
|
RU2813840C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2008 |
|
RU2375571C1 |
| Горный комбайн | 2020 |
|
RU2733875C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2013 |
|
RU2522111C1 |
Изобретение относится к горной промышленности и предназначено для автоматизации процесса управления проходческо-очистными комбайнами. Согласно способу, основанному на контроле тока нагрузки главного двигателя исполнительного органа комбайна, задают максимально допустимое значение тока, потребляемого главным двигателем исполнительного органа комбайна, и скорость подачи комбайна на забой. Сравнивают заданное значение тока с фактическим значением, определяемым посредством датчика тока, если фактическое значение тока нагрузки главного двигателя исполнительного органа больше заданного, снижают скорость подачи комбайна на забой, если фактическое значение тока нагрузки главного двигателя исполнительного органа меньше заданного, то определяют фактическое значение скорости подачи комбайна на забой, сравнивают его с заданным значением скорости подачи и при несовпадении сравниваемых значений регулируют скорость подачи комбайна. Контроль токов нагрузки осуществляют на всех приводных двигателях породоразрушающего исполнительного органа комбайна, при этом регулируют скорость подачи комбайна при превышении тока нагрузки хотя бы на одном приводном двигателе исполнительного органа. При достижении заданной скорости подачи осуществляют изменение шага резания посредством регулирования частоты переносного вращения резцовых дисков. Изобретение позволяет реализовать автоматическое управление приводами механизма перемещения и переносного вращения резцовых дисков проходческо-очистных комбайнов с планетарно-дисковыми исполнительными органами, обеспечить рациональные значения параметров резания и снизить удельные энергозатраты процесса разрушения горного массива. 1 з.п. ф-лы, 2 ил.
1. Способ управления горным комбайном с планетарно-дисковым исполнительным органом, основанный на контроле тока нагрузки главного двигателя исполнительного органа комбайна, заключающийся в том, что задают максимально допустимое значение тока, потребляемого главным двигателем исполнительного органа комбайна, и скорость подачи комбайна на забой, сравнивают заданное значение тока с фактическим значением, определяемым посредством датчика тока, если фактическое значение тока нагрузки главного двигателя исполнительного органа больше заданного, снижают скорость подачи комбайна на забой, если фактическое значение тока нагрузки главного двигателя исполнительного органа меньше заданного, то определяют фактическое значение скорости подачи комбайна на забой, сравнивают его с заданным значением скорости подачи и при несовпадении сравниваемых значений регулируют скорость подачи комбайна, отличающийся тем, что контроль токов нагрузки осуществляют на всех приводных двигателях породоразрушающего исполнительного органа комбайна, при этом регулируют скорость подачи комбайна при превышении тока нагрузки хотя бы на одном приводном двигателе исполнительного органа, при достижении заданной скорости подачи осуществляют изменение шага резания посредством регулирования частоты переносного вращения резцовых дисков.
2. Способ по п. 1, отличающийся тем, что для регулирования частоты переносного вращения резцовых дисков используют тиристорный преобразователь частоты питающего напряжения, а для регулирования скорости подачи комбайна на забой используют сервопривод регулятора потока гидросистемы привода хода комбайна.
| САЖИН Р.А., Автоматизация технологических процессов горного производства: учебное пособие, Пермский государственный технический университет, Пермь: Изд-во ПГТУ, 2009 | |||
| Способ регулирования скорости подачи комбайна | 1981 |
|
SU968391A1 |
| Способ разрушения крепких горных руд дисковыми шарошками | 1989 |
|
SU1677295A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ ПРИВОДА РЕЗАНИЯ УГОЛЬНЫХ КОМБАЙНОВ | 1999 |
|
RU2170820C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2010 |
|
RU2460882C2 |
| GB 1526028 A, 27.09.1978. | |||

