ОБЛАСТЬ ТЕХНИКИ
[001] Изобретение относится к энергетически эффективному устройству и способу использования этого устройства для прохождения сквозь полную окклюзию кровеносного сосуда при чрескожном коронарном вмешательстве ("PCI") или для улучшения проходимости катетера для чрескожной транслюминальной ангиопластики (РТА) сквозь частичную окклюзию кровеносного сосуда. В частности, устройство обеспечивает передачу энергии дистальному наконечнику устройства для чрескожного коронарного вмешательства посредством тягового усилия для прохождения сквозь окклюзию с минимальными потерями энергии. Кроме того, устройство может быть применено в ходе чрескожных вмешательств в периферийные артерии.
УРОВЕНЬ ТЕХНИКИ
[002] В медицине давно ведется поиск действенных путей лечения заболеваний, касающихся стеноза (сужение или закупорка) полости артерии. Подобное состояние, обычно называемое окклюзией, возникает у пациентов, страдающих от атеросклероза, характеризуется накоплением фиброзной жировой или кальцинированной ткани в артериях, а также такое состояние называется атеросклеротической бляшкой или кровяной бляшкой. Окклюзия может быть частичной или полной, кроме того, она может быть мягкой и пластичной или твердой и кальцинированной. Окклюзия может возникать в различных местах артериальной системы, в том числе в аорте, в коронарных и каротидных артериях и периферийных артериях, и может приводить к повышенному давлению, ишемической болезни, стенокардии, инфаркту миокарда, инсульту или даже к смерти.
[003] Для лечения артериальных окклюзий предпочтительно использование малоинвазивных процедур. В ходе данных процедур катетер - длинное и очень гибкое трубчатое устройство - вводится в главную артерию через небольшой артериальный прокол, выполняемый в паховой области, в области плеча, бедра или шеи. Катетер продвигают и направлен в место стеноза. Для лечения суженных артерий было разработано множество устройств, располагаемых на дистальном конце катетера и доставляемых им в место стеноза. Примерами выполняемых процедур могут быть чрескожная транслюминальная коронарная ангиопластика ("РТСА"), прицельная коронарная атерэктомия ("DCA") и стентирование.
[004] В случае полной окклюзии для начала необходимо обеспечить проход через окклюзию для того, чтобы расположить баллонный/стент катетер в целевом суженном участке сосуда. Поскольку морфология окклюзии сложна и различна для каждого пациента, обычные способы и устройства для устранения указанных окклюзий не давали больших результатов и требуют проведения длительных процедур, потенциально оказывающих негативное воздействие на пациента. К данным негативным воздействиям могут быть отнесены перфорация стенки кровеносного сосуда, высокие дозы радиационного излучения или повреждение почек вследствие широкого использования ангиографического контрастного вещества.
[005] Стенозы или окклюзии могут состоять из различных материалов: от более мягких жировых веществ, таких как холестерин, до более твердых фиброзных веществ или твердого кальцинированного материала. Обычно границы окклюзии, то есть на проксимальном и дистальном колпачках, состоят из более твердого кальцинированного материала. Прохождение через более твердые материалы вызывает больше трудностей, требуется значительное количество энергии, а для прохождения через более мягкие материалы необходимо меньше энергии. Следовательно, для прохождения через окклюзию необходимо сообщить относительно большое количество энергии дистальному концу катетера или проволочному проводнику, особенно в случае наличия кальцинированного материала.
[006] К некоторым известным способам для прохождения через полную окклюзию могут быть отнесены абляционная энергия радиочастотного излучения (использована в системах, распространяемых фирмой Intralumenal Therapeutics под торговой маркой Safecross™), энергия колебаний с частотой приблизительно 20 КГц и малыми амплитудами (использована в системах, распространяемых фирмой FlowCardia Inc. под торговой маркой Crosser™), предназначенный для этой цели жесткий проволочный проводник, продавливающий проход через окклюзию (разработан фирмой Asahi Intec Со и распространяется под названием Confianza 9g/Conquest и проволочные проводники Miracle 12g), и механические колебательные элементы, работающие на высоких частотах (использованы в системах, распространяемых фирмой FlowCardia Inc. под торговой маркой Crosser™). При использовании последних средств для прохождения через окклюзию передача энергии между источником энергии на проксимальном конце катетера и сверлом, расположенным на дистальном конце катетера, сопровождается ее значительными потерями. А также эти средства имеют ограниченный срок эксплуатации вследствие усталости материалов. Например, в ультразвуковом катетере ультразвуковая энергия обычно поступает от ультразвукового преобразователя на проксимальном конце катетера, и затем она передается в дистальную головку катетера в виде гармонического колебания, вызывая колебания дистальной головки и также удаляя или разрушая имеющуюся окклюзию. Для прохождения в места обработки такие катетеры должны иметь достаточную длину - около 90-150 см или более, и, таким образом, большое количество энергии должно быть изначально передано для достижения ею дистального конца. В то же время для обеспечения достаточной гибкости катетера, необходимой для продвижения через извилистые сосуды, катетер должен быть достаточно тонким. Большая длина в сочетании с малым диаметром обуславливают частое возникновение проблемы, связанной с поломкой проволочного проводника вследствие напряжения и износа за счет импульсов высокой энергии. Проволочные проводники, имеющие достаточную жесткость для прохождения сквозь твердые окклюзии, имеют недостаток, связанный с тем, что их негибкость и прямые наконечники усложняют продвижение в нужном направлении сквозь извилистые сосуды и увеличивают риск перфорации сосудов. Твердые материалы, имеющие достаточную гибкость для приспосабливания к извилистости сосудов, имеют недостаток, связанный с их перекручиванием вследствие проксимального расположения толкающего воздействия. Перекручивание приводит к потере энергии посредством передачи ее поперечным силам и трению относительно полости, в которой расположен твердый материал. Для всех подобных устройств показатель эффективности ограничен от 40 до 70%.
[007] Окклюзия содержит различные материалы различной плотности и твердости. Таким образом, природа энергии, использующейся в устройстве для восстановления проходимости сосуда с окклюзией, должна подходить к определенному типу окклюзии, а процесс прохождения сквозь окклюзию необходимо контролировать для предотвращения перфорации стенок артерии или повреждения здоровых тканей. Кроме того, вследствие того, что энергия образуется на проксимальном конце катетера, она должна быть достаточной для достижения дистального конца устройства, находящегося рядом с окклюзией, на уровне, достаточном для прохождения сквозь окклюзию без повреждения проволочных проводников и без влияния на гибкость устройства. Согласно приведенному выше описанию существующие устройства также подвержены недостаткам, связанным с недостаточным количеством энергии, передаваемой на дистальный конец устройства, или несовпадением вида доставляемой энергии и вида окклюзии, что иногда приводит к приложению слишком большой по величине силы, вследствие чего повышается риск повреждения или даже перфорации стенки полости. Соответственно, существует необходимость в создании системы или устройства, которое может передавать подходящую энергию устройству для восстановления проходимости сосуда с окклюзией.
[008] Во внутриполостных устройствах, выполняемых для прохождения сквозь окклюзии сосуда, механическое перемещение, т.е. колебания элемента, взаимодействующего с окклюзией, обычно может быть обеспечено посредством помещения источника энергии на проксимальный конец устройства и передачи энергии дистальному концу устройства механическими средствами. Например, в одном из устройств из уровня техники (т.е. в устройстве Crosser™, выпускаемом FlowCardia Inc.) используется жесткая проволока, выполненная из нитинола. Жесткость проволоки позволяет передавать осевую силу, инициированную на его проксимальном конце, дистальному концу этой проволоки посредством ее продвижения. Однако при подобном способе передачи энергии имеют место значительные и, кроме того, не поддающиеся прогнозу (т.е. переменные по величине) потери энергии вследствие передачи энергии трубке корпуса (т.е. полости катетера). Один из частных недостатков устройства состоит в возможности жесткой проволоки сгибаться для достижения соответствия анатомии кровеносного сосуда. Потери энергии в жестких проволоках происходят зачастую вследствие двух факторов: (1) момента инерции, который может проявлять себя при сгибании твердого тела. Сила, прикладываемая для изгибания жесткой проволоки, может быть преобразована в трение в случае, в котором жесткая проволока заключена в катетерной полости; (2) продольного изгиба проволоки, вызывающего перемещение осевых сил к поперечным силам и в результате приводящего к увеличению сил трения внутри полости корпуса. Дополнительно, при увеличении осевых сил для компенсации потерь энергии продольный изгиб усиливается и, таким образом, еще больше усложняет достижение осевых колебаний и, в частности, управляемых осевых колебаний.
[009] Важное инженерное явление представляет собой продольный изгиб гибких балок при нагрузке. Критическая сила, необходимая для продольного изгибания гибкой балки (в том числе, например, жесткой проволоки), задана Уравнением 1:
где Fc обозначает максимальную силу, которую может выдерживать жесткая проволока без продольного изгиба, L обозначает длину жесткой проволоки и К представляет собой численную постоянную, зависящую от способа закрепления жесткой проволоки на ее концах. Например, в случае, в котором оба конца проволоки закреплены на шарнире (т.е. свободно вращаются) K=1. В случае, в котором один конец закреплен на шарнире, а другой конец зафиксирован K=0,7. В случае, в котором прямая проволока, закрепленная на ее дистальном конце, испытывает воздействие толкающего усилия на ее проксимальном конце вследствие воздействия силы, превышающей критическую силу Fc при продольном изгибе, жесткая проволока будет изогнута в сторону и не будет передавать толкающее усилие далее.
[010] Обмоточная жесткая проволока внутри полости катетера - в частности, катетер, проходящий через извилистый кровеносный сосуд, - будет изогнута. Даже при отсутствии протягивания или продвижения жесткой проволоки присутствуют силы, действующие на жесткую проволоку, для удерживания ее в изогнутом состоянии. Трение, возникающее при взаимодействии изогнутой проволоки и поверхности полости катетера, обуславливает прижимание твердой проволоки к стенке полости до некоторой степени. В случае, в котором трение в точке прижимания выше, чем предел продольного изгиба, проволока будет подвергнута изгибу, негативно влияющему на способность к проталкиванию проволоки. Сопротивление, возникающее при соприкосновении жесткой проволоки и окклюзии сосуда, действует аналогично точке прижимания вследствие трения на сгибе. Жесткая проволока в трубке, такой как катетер, совершает перемещение только в том случае, в котором толкающее усилие больше силы трения или сопротивления, действующего на жесткую проволоку. В случае, в котором прямая часть жесткой проволоки перед точкой сопротивления достаточна длинная, тем не менее, жесткая проволока будет изогнута перед тем, как толкающее усилие достигнет величины, достаточной для преодоления трения. Это объясняет причину трудности передачи силы к одному концу обмоточной жесткой проволоки посредством проталкивания ее с противоположного конца вследствие предположительного изгибания жесткой проволоки.
[011] Следовательно, существует потребность в создании устройства для прохождения сквозь окклюзии сосудов, выполненного с возможностью передачи эффективной энергии управляемым и безопасным способом для открытия прохода сквозь окклюзии сосуда и для улучшения проходимости катетеров, содержащих подобные устройства, через кровеносные сосуды. Кроме того, существует потребность в создании системы, обеспечивающей возможность передачи достаточной энергии и возможность регулирования количества энергии, передаваемой на конец устройства, проникающий в окклюзию, в зависимости от твердости окклюзии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[012] Задачей настоящего изобретения является создание усовершенствованного устройства для прохождения сквозь окклюзию сосуда и/или прохождения сквозь частичную окклюзию, при этом устройство имеет колебательный элемент, выполненный для совершения колебаний улучшенным способом, в частности посредством более эффективной передачи энергии от внешнего источника энергии к дистальной части катетера.
Увеличение эффективности может быть достигнуто посредством использования сочетания натяжной проволоки и пружины в устройстве. В частности, устройство формирует силу колебаний, которая воздействует на колебательный элемент посредством тягового, а не толкающего усилия или сочетания толкающего и тягового усилий. Устройство согласно настоящему изобретению менее чувствительно к непредсказуемой геометрии, такой как извилистые изгибы кровеносных сосудов, чем устройства для чрескожного коронарного вмешательства, использующие толкающие усилия.
[013] Дополнительной задачей настоящего изобретения является создание системы, содержащей устройство, обеспечивающее тяговое усилие для прохождения сквозь окклюзию сосуда и выполненное с возможностью регулирования частоты или амплитуды колебаний для приведения ее в соответствие с твердостью окклюзии или натяжением элемента натяжения.
[014] Изобретение относится к устройству для восстановления проходимости в полости тела, такой как кровеносный сосуд с полной или частичной окклюзией.
В частности, устройство согласно настоящему изобретению содержит пружинный элемент, элемент натяжения, колебательный элемент, заключенные в катетере, и внешний источник колебательной энергии, в рабочем состоянии соединенный с элементом натяжения. На дистальном наконечнике устройства расположен колебательный элемент, который может быть представлен, например, в виде колпачка, схожего с колпачком катетера, или в виде колпачка, позволяющего увеличить механическое воздействие и улучшить прохождение сквозь окклюзию. Колебательный элемент совершает колебания в ответ на приложение тягового усилия к элементу натяжения и возвратную силу пружинного элемента. Колебания или вибрация колебательного элемента могут влиять на прохождение сквозь окклюзию. В частности, источник колебательной энергии предназначен для многократного натяжения и снятия нагрузки с элемента натяжения для осуществления колебаний колебательного элемента посредством пружинного элемента. Элемент натяжения выполнен с возможностью одновременного сжатия пружинного элемента в проксимальном направлении и таким образом осуществления передачи энергии колебательному элементу. Пружинный элемент выполнен с возможностью локального преобразования накапливаемой энергии в кинетическую энергию (при снятии нагрузки с элемента натяжения) и таким образом осуществления перемещения колебательного элемента в дистальном направлении. Ускорение кинетической энергии влечет за собой растяжение пружинного элемента для растяжения дистального конца пружинного элемента за пределы положения покоя (без нагрузки) и таким образом осуществления продвижения колебательного элемента далее в дистальном направлении. В кровеносном сосуде с окклюзией кинетическая энергия передается от колебательного элемента для воздействия на окклюзию.
Таким образом, колебательный элемент, расположенный на дистальном наконечнике катетера, выполнен с возможностью осуществления колебания с частотой и амплитудой, достаточной для прохождения сквозь окклюзию в полости тела. Катетер может представлять собой обычный хирургический медицинский катетер, имеющий полость для расположения в ней элемента натяжения, и, кроме того, предпочтительно наличие в катетере полости для расположения в ней проволочного проводника и других элементов, таких как направляющий элемент, измеряющий перемещение, элемент для введения контрастного вещества или элемент для удаления частиц окклюзии из области сверления.
[015] Источник колебательной энергии располагается извне по отношению к катетеру, однако в рабочем состоянии он соединен с элементом натяжения, свободно перемещающимся относительно катетера. Источник колебательной энергии может представлять собой любой источник энергии, выполненный с возможностью формирования по меньшей мере одного колебательного энергетического импульса посредством натяжения и снятия нагрузки. Источник колебательной энергии может представлять собой, к примеру, двигатель, вибрационное устройство, пьезоэлектрический двигатель или привод. Источник колебательной энергии растягивает элемент натяжения для формирования потенциальной энергии в пружинном элементе. Потенциальная энергия переходит в кинетическую энергию при снятии нагрузки в элементе натяжения, увеличении нагрузки на пружине и естественном растяжении пружинного элемента, таким образом происходит локальная передача механической энергии колебательному элементу, который может быть также прикреплен к дистальному концу пружинного элемента или к его части, продвигая колебательный элемент по направлению к окклюзии. Операцию повторяют с частотой и амплитудой, обеспечивающими возможность прохождения колебательного элемента сквозь окклюзию посредством сверления. Количество энергии может быть отрегулировано посредством выбора подходящего "пружинного" элемента с коэффициентом жесткости (k). Сила может быть дополнительно отрегулирована извне посредством задания амплитуды элемента натяжения. Мощностью (энергия в единицу времени), так же как и механическим воздействием, можно управлять с помощью частоты колебаний.
[016] Устройство может дополнительно содержать устройство, закрепляющее катетер относительно кровеносного сосуда для улучшения передачи сил колебаний окклюзии. Устройство может дополнительно содержать направляющее устройство для содействия в направлении движения сквозь окклюзию, особенно для использования в случаях наличия большого количества развилок вблизи искомой окклюзии. Катетер может быть совместимым для использования с другими дополнительными внешними или внутренними элементами для обеспечения возможности визуализации в устройстве или приспособлении и/или для удаления частиц, образующихся при сверлении, например, посредством всасывания.
[017] Система согласно настоящему изобретению содержит устройство согласно настоящему изобретению и управляющий блок, предназначенный для управления источником колебательной энергии и, таким образом, для регулирования частоты и/или амплитуды колебаний колебательного элемента.
В предпочтительном варианте реализации изобретения управляющий блок обладает возможностью регулирования источника колебательной энергии для формирования силы колебаний, соответствующей морфологии и твердости окклюзии, при этом сила колебаний имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду. Подходящая сила колебаний может быть достигнута посредством регулирования частоты, например, в диапазоне от нескольких Гц до нескольких сот Гц и/или регулирования амплитуды натяжения таким образом, что значение проникающей силы колебаний минимизировано и соответствует морфологии и твердости окклюзии. По меньше мере одна частота и по меньшей мере одна амплитуда, сформированные источником колебательной энергии, могут быть отрегулированы посредством управляющего блока для приведения их в соответствие обрабатываемой окклюзии. При необходимости, система согласно настоящему изобретению дополнительно содержит модуль операторского интерфейса и датчики для содействия оператору в управлении частотой и амплитудой колебаний колебательного элемента в зависимости от отклика датчиков касательно твердости окклюзии и/или Δy пружинного элемента.
[018] Предполагается, что посредством обеспечения минимальной силы, достаточной для прохождения сквозь окклюзию, увеличивается безопасность процедуры восстановления проходимости сосуда с окклюзией и потенциальные повреждения полости тела, например артерии, по сравнению с устройствами для восстановления проходимости сосуда с окклюзией, известными из уровня техники, снижаются. Соответственно, частота и/или амплитуда колебаний колебательного элемента может быть изменена вручную врачом-оператором для регулирования ее в соответствии с твердостью конкретной обрабатываемой окклюзии на основании навыков и опыта оператора. В альтернативном варианте реализации изобретения частота и амплитуда колебаний может быть отрегулирована автоматически или вручную на основании измерений твердости окклюзии. Для измерения твердости окклюзии устройство согласно настоящему изобретению может дополнительно содержать датчик или тензометрический датчик. В аналогичных примерах реализации изобретения управляющий блок может дополнительно содержать процессор, или модуль операторского интерфейса, содержащий процессор, который может быть использован, при этом процессор выполнен с возможностью проведения анализа входных данных с датчика или тензометрического датчика для расчета твердости ткани или амплитуды колебаний и модуль операторского интерфейса выполнен с возможностью представления вычислений в доступной для пользователя форме. Управляющий блок или модуль операторского интерфейса может содержать по меньшей мере одно регулировочное средство для управления оператором вручную для регулирования частоты и/или амплитуды тягового усилия, формируемого источником колебательной энергии. При необходимости, модуль операторского интерфейса может дополнительно содержать дисплейный элемент для отображения информации, касающейся твердости окклюзии.
[019] Система может дополнительно включать в себя механизм регулировки натяжения для компенсации неравномерностей в длине пути элемента натяжения в криволинейных или извилистых полостях. Механизм управления нагрузкой может регулировать длину элемента натяжения или амплитуду натяжения элемента натяжения.
[020] Изобретение дополнительно относится к способу осуществления колебаний колебательного элемента, способу использования устройства или системы для восстановления проходимости полости тела, с окклюзией, например, кровеносного сосуда и к способу управления силой колебаний в устройстве. Результат представляет собой универсальное и энергетически эффективное энергетически выгодное передающее устройство, систему и способ прохождения сквозь полную окклюзию и/или улучшения проходимости катетера через полости тела с частичной окклюзией.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[021] На фиг. 1А-Е показан способ работы согласно примеру реализации устройства настоящего изобретения в течение одного цикла натяжения. На фиг. 1А показано устройство, к которому не приложена нагрузка. На фиг. 1В показано устройство с приложенной к элементу натяжения нагрузкой и сжатой пружиной с нагрузкой (накопленной энергией). Накопленная энергия равна произведению коэффициента жесткости (k) и амплитуды сжатия (х). На фиг. 1С показано устройство после снятия нагрузки с элемента натяжения и с кинетической энергией, высвобождаемой посредством пружины сжатия. На фиг. 1D показано устройство в отсутствие нагрузки в элементе натяжения и пружина сжатия на максимальном уровне растяжения (yx) для амплитуды сжатия (х). На фиг. 1Е показано устройство с вновь приложенной к элементу натяжения нагрузкой.
[022] На фиг. 2 показана последовательность схематических чертежей, иллюстрирующих элементы датчика ткани согласно настоящему изобретению. На фиг. 2а-2с показан способ возможного использования датчика ткани согласно примеру реализации, прикрепленного к пружинному элементу, для определения соответствия силы, приложенной к окклюзиям различной твердости, данным окклюзиям.
[023] На фиг. 3 схематически показан способ возможного использования датчика согласно примеру реализации для прямого измерения достигнутой амплитуды колебаний колебательного элемента.
[024] На фиг. 4 показан один из примеров реализации управляющей схемы для регулирования силы колебаний.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[025] Для преодоления ограничений устройств, известных в уровне техники, связанных с потерями механической энергии, в устройстве согласно настоящему изобретению использован дистальный пружиноподобный элемент, способный накапливать потенциальную энергию. Потенциальная энергия возникает и превращается в кинетическую энергию на требуемой частоте посредством натяжения гибкого элемента натяжения и снятия нагрузки с него.
В данном описании термин «гибкий» обозначает способность к боковому изгибу без возникновения момента инерции, например, для приведения устройства в соответствие форме извилистых сосудов, но не продольному изгибу, например элемент натяжения должен быть выполнен минимально растяжимым или эластичным в длину. «Снятием нагрузки с элемента натяжения» обозначен тот факт, что нагрузка, формируемая в элементе натяжения посредством натяжения элемента натяжения, может быть снята. Одновременно со снятием нагрузки с натяжной проволоки потенциальная энергия пружинного элемента переходит в кинетическую энергию. Накопленная энергия пружинного элемента переходит в окружающие ткани или окклюзию посредством колебательного элемента, воздействующего на окклюзию. Преимущество признака элемента натяжения настоящего изобретения состоит в том, что сила не будет значительно уменьшена по величине от проксимального конца устройства, на котором происходит формирование энергии, к дистальному концу устройства, на котором расположен колебательный элемент, воздействующий на окклюзию. Другое важное преимущество изобретения состоит в обеспечении полного управления силой (амплитудой и частотой) пользователем, что позволяет пользователю приводить силу в соответствие с окклюзией и поддерживать безопасность процедуры.
[026] В отличие от потерь энергии, возникающих при передаче энергии от проксимального к дистальному концу устройства, характерных для устройств, известных из уровня техники, потери энергии в настоящем изобретении сведены к минимуму посредством использования сочетания пружинного элемента и элемента натяжения. Различные сочетания амплитуды и силы могут быть получены вследствие соответствующего выбора пружинного элемента, помещаемого на дистальном конце катетера.
[027] Для преодоления ограничений уровня техники, в частности потерь механической энергии, устройство согласно настоящему изобретению содержит пружинообразный элемент на своем дистальном конце для локальной передачи силы. Пружинный элемент выполнен с возможностью приложения к нему нагрузки, т.е. сжатия для формирования потенциальной энергии, посредством натяжения элемента натяжения. Потенциальная энергия может быть преобразована в кинетическую энергию при снятии нагрузки с элемента натяжения. Таким образом, устройство согласно настоящему изобретению, содержащее процесс натяжения и снятия нагрузки, будет более эффективным по сравнению с проталкиванием жесткой проволоки, даже в случае, в котором траектория элемента натяжения отклонена от прямой траектории, например при изгибе катетера. Особенность настоящего изобретения, связанная с более эффективной передачей энергии, обеспечивает улучшение возможности прохождения сквозь частичную или полную окклюзии в сосудах и также улучшение проходимости катетеров для чрескожной транслюминальной ангиопластики.
[028] Устройство, система и способ согласно настоящему изобретению обеспечивают усовершенствованное устройство и способ осуществления колебаний колебательного элемента для восстановления проходимости кровеносного сосуда с полной окклюзией. Кроме того, устройство согласно настоящему изобретению может быть применено для устранения окклюзий из других полостей тела. В особенности, устройство согласно настоящему изобретению содержит катетер с проксимальным и дистальным концами, пружинный элемент с проксимальным и дистальным концами, при этом проксимальный конец пружинного элемента прикреплен к дистальному концу катетера, элемент натяжения, расположенный в катетере, с проксимальным и дистальным концами, при этом дистальный конец элемента натяжения прикреплен к дистальному элементу, колебательный элемент и источник колебательной энергии, соединенный в рабочем состоянии с проксимальным концом элемента натяжения и выполненный с возможностью формирования по меньшей мере одного колебания в колебательном элементе посредством элемента натяжения и пружинного элемента.
[029] Устройство согласно настоящему изобретению обеспечивает осуществление лечебных колебаний в колебательном элементе на дистальном конце катетера. Источник колебательной энергии, выполненный с возможностью натяжения элемента натяжения на расстояние (х) для формирования нагрузки (Т) и для последующего снятия нагрузки, обеспечивает возникновение силы для формирования лечебных колебаний колебательного элемента. Элемент натяжения функционально соединен на его дистальном конце с пружинным элементом посредством дистального элемента. Пружинный элемент, имеющий коэффициент жесткости (k), обеспечивает возникновение возвратного усилия, так что нагрузка в элементе натяжения может быть определена следующим образом Т=kx. Повторение этапов натяжения элемента натяжения и снятия нагрузки с него формирует колебания колебательного элемента с частотой и амплитудой, достаточной для прохождения сквозь окклюзию сосуда и ее устранения.
[030] Предпочтительно выполнение элемента натяжения в форме гибкого троса. Для выполнения элемента натяжения может быть использован любой полимерный материал с высокой прочностью. Не ограничивающие примеры подходящих материалов включают углеродный полимер, DSM Dyneema® или Dyneema Purity® (фирма DSM, Херлен, Нидерланды) или другой подходящий полимерный материал, такой как полиэтилен или полиэстер.
[031] Пружинный элемент может представлять собой, например, пружину сжатия, цилиндрическую винтовую пружину (например, провод в форме спирали), пластинчатую пружину, гофрированную оболочку, полимерный материал, выполненный с возможностью сжатия, эластичную мембрану, пружину с покрытием или схожий элемент, подходящий для накопления потенциальной энергии при сжатии и высвобождении кинетической энергии при увеличении сжимающей нагрузки. Сжатие и растяжение пружинного элемента может быть таким образом использовано для осуществления колебаний колебательного элемента с частотой и амплитудой, достаточными для прохождения сквозь окклюзию сосуда.
[032] Дистальный элемент, к которому прикреплен элемент натяжения, может представлять собой колебательный элемент или дистальный конец пружинного элемента.
[033] Колебательный элемент является частью устройства, которая воздействует на окклюзию. Колебательный элемент может представлять собой, к примеру, колпачок, прикрепленный к дистальному концу пружинного элемента, дистальный конец активной гофрированной оболочки или внешнюю поверхность эластичной мембраны, например, в случае, в котором эластичная мембрана представляет собой пружинный элемент. Колебания колебательного элемента вызваны натяжением элемента натяжения и снятием нагрузки с него посредством прямого или непрямого воздействия пружинного элемента, в зависимости от того, выполнен ли пружинный элемент с возможностью воздействия на окклюзию. В случае, в котором пружинный элемент выполнен таким образом, что его дистальная часть представляет собой конструкцию, например внешнюю поверхность эластичной мембраны или дистальный конец активной гофрированной оболочки, воздействующую на окклюзию, колебательный элемент представляет собой указанную дистальную часть пружинного элемента.
[034] Источник колебательной энергии может представлять собой, к примеру, вибрационное устройство, привод, электромагнитную катушку, обычный двигатель или любой подобный источник энергии, имеющий элемент, совершающий возвратно-поступательные движения и способный выполнять натяжение элемента натяжения и снятие нагрузки с него. «Снятие нагрузки» означает снятие нагрузки с элемента натяжения, формируемой его натяжением. Источник колебательной энергии расположен вне катетера. Источник колебательной энергии может выполнять натяжение элемента натяжения механическим путем, элемент натяжения может вызывать сжатие пружинного элемента, и таким образом обусловлено возможное проксимальное перемещение колебательного элемента. Далее, снятие нагрузки с элемента натяжения, вызывающее растяжение пружинного элемента, обуславливает возможность большего дистального перемещения колебательного элемента.
[035] Предпочтительно катетер имеет, по меньшей мере, одну полость для расположения в ней элемента(ов) натяжения и полость для проволочного проводника. Кроме того, катетер может включать в себя различные полости, предназначенные для других особенностей, таких как направляющий проводник или другой механизм, контрастные вещества для визуализации, устройства для внутрисосудистого ультразвукового исследования, элементы для измерения амплитуды и силы дистального перемещения, элементы для удаления частиц окклюзии и т.п.
[036] Система согласно настоящему изобретению содержит устройство согласно настоящему изобретению и управляющий блок для управления частотой и/или амплитудой натяжения (и, таким образом, косвенно для управления частотой и/или амплитудой колебаний колебательного элемента).
Амплитуда натяжения не должна превышать предел упругости пружинного элемента, и предпочтительно частота натяжения не должна превышать предел собственной частоты пружины. Оператор может регулировать колебания посредством ручного регулирования частоты и/или амплитуды колебаний непосредственно с помощью управляющего блока. Управляющий блок может содержать регулирующие средства, например рукоятки, индикаторы с круговой шкалой, кнопки, рычаги и аналогичные элементы, цифровые или аналоговые, подобные реостату или потенциометру, обеспечивающие возможность регулирования амплитуды или частоты, при которой источник колебательной энергии выполняет натяжение элемента натяжения. Управление конкретной частотой или амплитудой в любой заданный момент времени возможно посредством регулирования колебательной энергии на входе с помощью управляющего блока, который может быть отрегулирован вручную оператором непосредственно при помощи управляющего блока.
[037] Согласно настоящему изобретению дополнительно предложен способ осуществления колебаний колебательного элемента в устройстве для прохождения сквозь окклюзию (устройство) и способ обработки сосуда с окклюзией с использованием устройства, например, для восстановления проходимости сосуда с окклюзией. Кроме того, предложен способ управления силой колебаний.
[038] Способ колебания колебательного элемента включает этапы, согласно которым берут элемент натяжения, пружинный элемент и колебательный элемент, причем колебательный элемент функционально прикреплен к дистальному концу пружинного элемента, натягивают элемент натяжения для формирования нагрузки, прижимающей дистальный конец пружинного элемента к проксимальному концу пружинного элемента, снимают нагрузку, сформированную элементом натяжения и таким образом обеспечивают возможность растяжения пружинного элемента, повторяют этапы натяжения и снятия нагрузки для осуществления колебаний колебательного элемента. «Функционально прикреплен» означает, что элемент натяжения прикреплен к дистальному элементу, что обеспечивает возможность передачи нагрузки, сформированной посредством натяжения элемента натяжения (Т=kx), пружинному элементу для обеспечения нагрузки пружинного элемента.
[039] Способ обработки сосуда с окклюзией может включать этапы, согласно которым вводят устройство согласно настоящему изобретению в указанный сосуд, располагают дистальный конец катетера для обеспечения его контакта с окклюзией, формируют последовательность тяговых усилий от источника колебательной энергии, воздействующих на элемент натяжения, для обеспечения колебаний колебательного элемента и прохождения сквозь окклюзию. Способ может дополнительно включать этап, согласно которому продвигают устройство сквозь окклюзию, при этом колебательный элемент проходит сквозь окклюзию.
[040] Для окклюзий, в частности окклюзий сосудов, характерна неравномерная плотность и твердость. Для прохождения сквозь более твердые части окклюзии необходимы относительно большие по величине силы, чем при прохождении сквозь более мягкие части окклюзии. Система согласно настоящему изобретению содержит управляющий блок, выполненный с возможностью регулирования силы, приложенной к окклюзии посредством регулирования частоты или амплитуды колебаний колебательного элемента автоматически или по указанию.
[041] Наименьшая сила, необходимая для восстановления прохода сквозь окклюзию, может быть получена посредством сочетания частоты и амплитуды колебаний. С увеличением амплитуды или частоты колебаний сила будет увеличена. С уменьшением амплитуды или частоты колебаний сила будет уменьшена. Определение силы, подходящей для данной окклюзии, может быть выполнено «на глаз» врачом-оператором на основании его опыта и навыка диагностики. Оператор может регулировать колебания для задания силы, подходящей для прохождения сквозь окклюзию, посредством ручного регулирования частоты и/или амплитуды колебаний непосредственно с помощью управляющего блока. Альтернативно, устройство согласно настоящему изобретению может дополнительно содержать датчик (например, датчик ткани), выполненный для прямого или косвенного измерения твердости или жесткости биологической ткани, формирующей окклюзию, и амплитуда и/или частота колебаний колебательного элемента может быть отрегулирована на основании отклика датчика. В подобных примерах реализации изобретения отклик датчика, поступающий на процессор в управляющем блоке или в пользовательском устройстве ввода-вывода (в настоящем описании также упомянуто в качестве модуля операторского интерфейса), может обеспечивать возможность автоматического регулирования частоты и/или амплитуды колебаний посредством управляющего блока или ручного регулирования врачом-оператором на основании выходных данных, представленных в доступной оператору форме и полученных от пользовательского устройства ввода-вывода, которое, при необходимости, может дополнительно содержать дисплейный экран. В примерах реализации, в которых оператор регулирует источник колебательной энергии, управляющий блок или модуль операторского интерфейса может содержать регулирующие средства, такие как рукоятки, индикаторы с круговой шкалой, кнопки, рычаги и аналогичные элементы, цифровые или аналоговые, аналогичные реостату или потенциометру, позволяющие регулировать амплитуду или частоту тягового усилия, сформированного при помощи источника колебательной энергии.
[042] В примерах реализации, в которых устройство согласно настоящему изобретению содержит датчик ткани, который может быть расположен на дистальном конце катетера для прямого измерения сопротивления, с которым сталкивается элемент, воздействующий на окклюзию, при его воздействии на окклюзию. Твердость окклюзии может быть определена посредством измерения растяжения пружинного элемента. В одном варианте операции для прямого измерения растяжения пружинного элемента в катетере может быть расположен магнитный датчик, например прикрепленный к внутренней стенке катетера, или твердость или жесткость окклюзии может быть измерена косвенным путем, посредством измерения изменения степени растяжения или скорости замедления при столкновении с окклюзией. Необходимая амплитуда колебаний колебательного элемента (т.е. амплитуда силы колебаний) может быть задана оператором, и в случае, в котором растяжение пружинного элемента меньше заданной величины, вычисленная разница представляет собой величину, характеризующую величину дополнительного тягового усилия, необходимого для достижения заданной амплитуды колебаний, достаточной для прохождения сквозь окклюзию. В любом варианте операции датчик может обеспечивать поступление отклика в процессор, формирующий выходной сигнал в удобной для оператора форме, при этом оператор может вручную регулировать входной энергетический импульс и в результате тяговое усилие посредством управляющего блока. Альтернативно, датчик может обеспечивать поступление отклика непосредственно в управляющий блок, который может быть выполнен с возможностью автоматического регулирования тягового усилия.
[043] Датчик может представлять собой, к примеру, тензометрический датчик, пьезорезистор, датчик микронапряжений или магнитный датчик. Тензометрический датчик представляет собой устройство, используемое для измерения деформации (напряжения) объекта. Наиболее известный вид тензометрического датчика содержит изолированный гибкий элемент, на который опирается схема на металлической фольге. Датчик прикреплен к объекту посредством соответствующего связывающего вещества, такого как цианоакрилат. При деформации объекта происходит деформация фольги, что обуславливает изменение ее электрического сопротивления. Данное изменение в сопротивлении, обычно измеряемое посредством моста Уитстона, может быть соотнесено с нагрузкой посредством введения величины, называемой коэффициентом тензочувствительности. Коммерческим примером подобного тензометрического датчика, который может быть использован в настоящем изобретении, служит тензометрический датчик Vishay 015DJ (компания Vishay Intertechnology, Малверн, Пенсильвания, США). Пьезорезистор представляет собой резистор, выполненный из пьезорезистивного материала, имеющий чувствительность, пропорциональную пьезорезистивному коэффициенту тензочувствительности пьезорезистора, который может быть определен соответствующим изменением сопротивления при напряжении. Обычно в качестве материала для выполнения датчиков, содержащих пьезорезисторы, выступает кремний. Такие пьезорезистивные датчики могут содержать, например, четыре пьезорезистора, имеющие размеры 6-10 мкм на 30-50 мкм, внедренные в гибкий крестообразный элемент с высоким аспектовым отношением, имеющий кремниевую меза-структуру высотой 525 мкм согласно описанию, приведенному в Beccai L. et al., Проектирование и производство гибридного кремниевого трехосного датчика силы для биомеханического применения. Датчики и исполнительные механизмы А: Физика. Том 120, Издание 2-е, стр. 370-382, 17 мая 2005. Кроме того, пьезорезисторы описаны в Патентах США №4,419,598 и 6,441,716, содержание которых включено в настоящее описание посредством ссылки; в WO 2005/106417 описаны тензодатчики, основанные на пьезорезистивных нанотрубках. Магнитоупругие датчики представляют собой миниатюрные датчики с низкой стоимостью и отсутствием подвижных частей, обладающие иными свойствами, которые могут быть полезными для биологического применения. Магнитоупругие датчики описаны в Патенте США №7,062,981, содержание которого включено в настоящее описание посредством ссылки. Коммерческим примером аналогичных магнитоупругих датчиков, которые могут быть использованы в настоящем изобретении, служат DVRT Микроминиатюрные Датчики Смещения (компания MicroStrain., Берлингтон, Вермонт, U.S.A.).
[044] Далее приведено детальное описание примеров реализации настоящего изобретения со ссылкой на чертежи. Схематичные и не обязательные для представления в масштабе чертежи приложены для изображения частных примеров реализации изобретения и не подразумевают ограничение объема настоящего изобретения.
[045] В частном примере реализации изобретения, показанном на фиг. 1А-Е, пружинный элемент 20 показан в виде цилиндрической винтовой пружины сжатия. Элемент 10 натяжения прикреплен на его дистальном конце к дистальному элементу 30, в данном случае к колпачку, который прикреплен к дистальному концу пружинного элемента 20 (пружины сжатия) и выступает в качестве колебательного элемента. Пружинный элемент 20 прикреплен на его проксимальном конце к дистальному концу катетера 40. Пружина сжатия выполнена с возможностью обеспечения сопротивления сжимающим силам. В соответствии с настоящим изобретением элемент 10 натяжения используется для сжатия пружинного элемента 20 (пружины сжатия) с нагрузкой (Т), при этом Т=kx где (k) обозначает коэффициент жесткости пружины и (х) обозначает удлинение пружины (в настоящем описании также упомянуто в качестве «расстояния сжатия»), в идеальном случае (х) соответствует расстоянию, на которое растянут элемент 10 натяжения. При снятии нагрузки с элемента 10 натяжения происходит естественное растяжение пружинного элемента 20 (пружина сжатия) и предпочтительно дальнейшее растяжение пружинного элемента 20 (пружины сжатия) при отсутствии сопротивления, на расстояние (y) перед возвращением ее в ненагруженное положение (0). В случаях, в которых пружинный элемент встречает сопротивление, такое как окклюзия, пружина будет растянута до точки, в которой происходит столкновение ее с окклюзией, и может не достигать положения растяжения, достигаемого в отсутствие сопротивления. В аналогичных случаях Δy будет меньше Δyx, где yx представляет собой естественное растяжение пружинного элемента при сжатии его на величину х (смещение = х). Оптимальный коэффициент жесткости пружины (k) для такой пружины сжатия согласно настоящему изобретению составляет 0.1-10 Н/мм.
[046] Для пружины в форме проволоки или полосы предпочтительно наличие закрытых концов или закрытых и шлифованных концов.
[047] На фиг. 1А-Е на поперечном сечении катетера детально показано состояние устройства согласно примеру реализации настоящего изобретения, содержащего пружину сжатия в различные моменты времени в течение одного цикла натяжения. На данном чертеже «один цикл натяжения» означает одно натяжение элемента натяжения и снятие нагрузки с него. На фиг. 1В показано, что при приложении нагрузки (Т) к элементу 10 натяжения происходит сжатие пружинного элемента 20 и накопление им энергии. На фиг. 1С показано устройство на некоторой стадии после снятия нагрузки с элемента 10 натяжения и падения нагрузки в элементе 10 натяжения до нуля (Т=0). При снятии нагрузки с элемента 10 натяжения посредством источника колебательной энергии (не показан) происходит осевое растяжение пружинного элемента 20. Растяжение пружинного элемента 20 обуславливает перемещение колебательного элемента, в данном примере реализации изобретения перемещение колпачка дистально со скоростью больше 0 (V>0).
Скорость механического перемещения колпачка (V, скорость) за время, как показано на фиг. 1С, при максимальной кинетической энергии в момент времени между максимальным сжатием и максимальным растяжением пружинного элемента 20 для заданной приложенной нагрузки (т.е. относительно его положения равновесия), может быть определена следующим образом: V=2πAsin(2πd⋅t), где А обозначает амплитуду сжатия, f - частоту, a t - время. Данная скорость, конечно, не включает в себя силы, возникновение которых в проксимальном направлении обусловлено окклюзией. Как показано на фиг. 1D, при отсутствии внешнего сопротивления, такого как сопротивление окклюзии сосуда, растяжение пружинного элемента 20 может быть продолжено за пределы состояния равновесия, на расстояние (yx), которое может быть приблизительно равным (х), в котором скорость принимает нулевое значение (V=0), и затем происходит естественное сжатие пружинного элемента с возникновением возвратной силы, по направлению к его положению равновесия (растяжение = 0). В рабочем состоянии в этой точке источник колебательной энергии снова выполняет натяжение элемента 10 натяжения на расстояние (х), согласно изображенной на фиг. 1Е пиковой нагрузке (Т=kx).
[048] Повторение этапов натяжения и снятия нагрузки с элемента натяжения приводит к формированию колебаний колебательного элемента, прикрепленного к дистальному концу пружинного элемента. Амплитудой колебаний можно колебательного элемента управлять посредством задания расстояния, на которое может быть растянут элемент натяжения. Частота колебаний будет зависеть от скорости натяжения элемента натяжения и коэффициента жесткости пружины. Частота натяжения/сжатия, формируемого источником колебательной энергии, предпочтительно имеет значение ниже, чем естественная частота пружины.
[049] Пример реализации изобретения, показанный на фиг. 1А-Е, иллюстрирует элемент натяжения, прикрепленный к колпачку, выступающий в качестве колебательного элемента устройства. В данном примере реализации изобретения колебательный колпачок будет представлять собой элемент устройства, который при использовании взаимодействует с окклюзией сосуда и выступает в качестве части устройства, проходящей сквозь окклюзию и просверливающей ее. Колпачок может содержать метал, твердый пластик или другие подходящие материалы. Колпачок может иметь любую из подходящих форм или границы для установления баланса между силой воздействия и безопасностью.
[050] Другие пружинные элементы могут функционировать аналогичным способом в соответствии с настоящим изобретением. Альтернативно, в случае, в котором необходимо задание минимальной амплитуды колебаний и большей частоты и силы, дистальный элемент, к которому может быть прикреплен элемент натяжения, представляет собой проксимальный конец пружинного элемента, при этом пружинный элемент может представлять собой цилиндрическую винтовую пружину растяжения, имеющую колпачок на ее дистальном конце и выступающую в качестве колебательного элемента, воздействующего на окклюзию.
[051] В других примерах реализации изобретения пружинный элемент представляет собой гофрированную оболочку. Согласно приведенному описанию гофрированная оболочка представляет собой в целом закрытый элемент, обладающий встроенной возвратной силой (коэффициент жесткости), и может представлять собой, например, плотно закрытую пружину с покрытием или рифленую трубку, содержащую пружину сжатия. Гофрированная оболочка может быть открытая или закрытая. Под «закрытым» исполнением гофрированной оболочки подразумевается исполнение, в котором один конец гофрированной оболочки выполнен закрытым в виде чаши; под "открытым исполнением" подразумевается исполнение, в котором оба конца гофрированной оболочки открыты, как в трубке. В закрытом исполнении закрытый конец будет расположен на дистальном конце. Таким образом, в случае, в котором гофрированная оболочка выполнена закрытой, она также в рабочем состоянии соединена на ее дистальном закрытом конце с элементом натяжения. Конструкция подобной гофрированной оболочки может быть выполнена таким образом, что она может быть сжата при действии нагрузки от элемента натяжения и возвращена в исходное положение (растянут) посредством внутренней пружинной силы при устранении внешней нагрузки.
Гофрированная оболочка, которая может быть использована в настоящем изобретении, доступна, например, от фирмы MS Bellows, 5322 McFadden Ave, Huntington Beach, CA 92649. Термины «гофрированная оболочка» и «пружинная гофрированная оболочка» в данном описании взаимозаменяемы. В альтернативном варианте, специалист может выполнить дистальную гофрированную оболочку посредством нанесения на пружину полимерного покрытия или встраивания пружины в полимерный материал при условии, что полимерная мембрана может быть растянута в продольном (осевом) направлении. Полимерный материл предпочтительно имеет низкую твердость (по Шору) по сравнению с материалом, составляющим внешние стенки катетера.
[052] В данном примере реализации изобретения дистальный элемент, к которому прикреплен элемент натяжения, может представлять собой дистальный конец закрытой гофрированной оболочки, или колебательный элемент, такой как колпачок, прикрепленный к дистальному концу гофрированной оболочки. В данной конструкции, подобной пружине растяжения, в случае, в котором источник колебательной энергии прилагает нагрузку на элемент натяжения, указанный элемент натяжения обуславливает сжатие гофрированной оболочки таким образом, что происходит смещение дистального конца гофрированной оболочки на расстояние (х). При снятии источником колебательной энергии нагрузки с элемента натяжения происходит растяжение гофрированной оболочки и дистальный конец гофрированной оболочки будет возвращен в его ненагруженное состояние (смещение 0), и предпочтительно его дистальное перемещение за пределы нулевого положения (0) и достижение дистального смещения, приблизительно равного (y) перед возвращением в положение равновесия (0).
[053] Согласно настоящему примеру реализации изобретения для гофрированной оболочки характерно сжатие при нагрузке от элемента натяжения и растяжение при снятии нагрузки. Многократное натяжение и снятие нагрузки с гофрированной оболочки приводит к колебанию ее дистального конца, к которому прикреплен колебательный элемент.
[054] В другом примере реализации изобретения пружинный элемент может быть выполнен в виде эластичной мембраны. Кроме того, в данном примере реализации изобретения эластичная мембрана может выступать в качестве дистального элемента и колебательного элемента. Эластичная мембрана может содержать биологически совместимый эластомер, такой как полиуретан, эластичный кремний или другой биологически совместимый эластичный материл, известный в уровне техники. Эластичная мембрана на дистальном конце катетера содержит наиболее дистальный элемент устройства для обеспечения контакта с данной поверхностью, например с поверхностью окклюзии для обеспечения прохождения сквозь окклюзию.
[055] При натяжении элемента натяжения эластичная мембрана совершает перемещение в проксимальном направлении, а снятие нагрузки с элемента натяжения обуславливает втягивание эластичной мембраны в дистальном направлении вследствие ее внутренней эластичности. Таким образом, при использовании устройства натяжение и снятие нагрузки с элемента натяжения вызывают колебания эластичной мембраны таким образом, что эластичная мембрана функционирует в качестве колебательного элемента, совершающего колебания с частотой и амплитудой, подходящими для прохождения сквозь окклюзию. При дистальном перемещении эластичной мембраны она будет входить в контакт с проксимальной поверхностью устраняемой окклюзии.
[056] В других примерах реализации другие пружинные элементы могут функционировать подобным способом согласно настоящему изобретению.
[057] Устройство и система согласно настоящему изобретению совместимы для использования с визуализирующими элементами для содействия оператору в определении положения дистального конца катетера относительно данной окклюзии или стенок сосуда в процессе работы устройства. Таким образом, устройство или система могут дополнительно содержать визуализирующие элементы и визуализирующую систему, например внутрисосудистую ультразвуковую систему, оптическую когерентную рефлектометрию, допплерографию или другие визуализирующие системы, известные в уровне техники. Катетер может дополнительно содержать по меньшей мере одну полость для элементов, вводимых при необходимости, таких как полость для визуализации или визуализирующего элемента - например, для внутрисосудистой ультразвуковой системы, оптической когерентной рефлектометрии, допплерографии, волоконной оптики или контрастных веществ, кроме того, катетер может дополнительно содержать дополнительную полость для размещения в ней таких подходящих элементов, как направляющие или других лечебные элементы. Полость может быть выполнена с возможностью функционирования в качестве полости проволочного проводника для ввода катетера в полость тела, после чего в случае, в котором использование проволочного проводника больше не необходимо, он может быть удален, а полость может быть использована для размещения в ней визуализирующего устройства, использующегося в процессе работы устройства, например в процессе прохождения сквозь окклюзию. Альтернативно, данная полость может быть использована для всасывания остатков материала, возникающих при сверлении в процессе прохождения сквозь окклюзию.
[058] В любом примере реализации изобретения устройство может при необходимости включать в себя анкерный элемент катетера для крепления катетера к стенкам кровеносного сосуда. Анкерный элемент катетера может быть использован для обеспечения устойчивости катетера внутри полости тела в процессе операции для предотвращения его значительного перемещения в ответ на силы колебаний и для крепления катетера к стенкам кровеносного сосуда для улучшения возможности передачи силы колебаний. В анкерном элементе катетера может быть выполнена полость. Анкерный элемент катетера может представлять собой, например, по меньшей мере один баллон, выполненный с возможностью расширения. В аналогичном примере реализации изобретения полость анкерного элемента может представлять собой расширяемую полость, заполненную текучей средой, предпочтительно жидкостью, в частности биологически совместимой жидкостью, и может быть использована для надувания (расширения), по меньшей мере, одного баллона, выполненного с возможностью расширения, для закрепления катетера в кровеносном сосуде. Закрепление катетера подобным способом повышает эффективность сил колебаний в процессе обработки определенных видов окклюзий.
[059] Таким образом, устройство согласно настоящему изобретению может содержать следующие элементы. В одном из примеров реализации устройство для прохождения сквозь окклюзию сосуда содержит катетер с проксимальным и дистальным концами, пружинный элемент с проксимальным и дистальным концами, при этом проксимальный конец пружинного элемента прикреплен к дистальному концу катетера, элемент натяжения, расположенный в катетере, с проксимальным и дистальным концами, при этом дистальный конец элемента натяжения прикреплен к дистальному элементу, и колебательный элемент. Еще в одном из примеров реализации устройство для прохождения сквозь окклюзию сосуда содержит катетер с проксимальным и дистальным концами, пружинный элемент с проксимальным и дистальным концами, при этом проксимальный конец пружинного элемента прикреплен к дистальному концу катетера, элемент натяжения, расположенный в катетере с проксимальным и дистальным концами, при этом дистальный конец элемента натяжения прикреплен к дистальному элементу, колебательный элемент и источник колебательной энергии, соединенный в рабочем состоянии с проксимальным концом элемента натяжения и выполненный с возможностью формирования по меньшей мере одного колебания в колебательном элементе посредством элемента натяжения и пружинного элемента с помощью натяжения указанного элемента натяжения. Еще в одном примере реализации изобретения элемент натяжения может представлять собой гибкий трос. В одном варианте еще одного примера реализации изобретения дистальный элемент представляет собой колебательный элемент. В другом варианте еще одного примера реализации изобретения дистальный элемент представляет собой дистальный конец пружинного элемента. В другом варианте еще одного примера реализации изобретения колебательный элемент представляет собой колпачок, прикрепленный к дистальному концу пружинного элемента. Еще в одном варианте пружинный элемент выбран из группы, содержащей пружину сжатия, цилиндрическую винтовую пружину, пластинчатую пружину, гофрированную оболочку, полимерный материал, выполненный с возможностью сжатия, и эластичную мембрану. В другом варианте реализации изобретения источник колебательной энергии выбран из группы, содержащей двигатель, имеющий элемент, совершающий возвратно-поступательное движение, вибрационное устройство, привод и электромагнитную катушку. Еще в одном примере реализации изобретения устройство дополнительно содержит анкерное устройство катетера. В одном из вариантов анкерное устройство катетера представляет собой баллон, выполненный с возможностью расширения. Еще в одном примере реализации изобретения устройство дополнительно содержит направляющее устройство катетера.
[060] Кроме того, изобретение относится к системе согласно приведенному описанию. Система согласно настоящему изобретению содержит любой пример реализации устройства согласно настоящему изобретению и управляющий блок, выполненный для управления источником колебательной энергии. В одном примере реализации системы согласно настоящему изобретению колебание содержит по меньшей мере одну частоту и по меньшей мере одну амплитуду, для которых обеспечена возможность независимого регулирования посредством управляющего блока. Еще в одном примере реализации изобретения система дополнительно содержит визуализирующую систему, причем катетер дополнительно включает в себя полость для расположения в ней визуализирующего элемента. Еще в одном примере реализации система дополнительно содержит датчик и процессор, который в рабочем состоянии соединен с указанным датчиком, соединенный в рабочем состоянии с управляющим блоком и выполненный с возможностью проведения анализа входного сигнала, поступающего с датчика. В одном из вариантов процессор выполнен с возможностью соединения с модулем операторского интерфейса.
Еще в одном варианте модуль операторского интерфейса содержит дисплейный элемент. В одном примере реализации изобретения система содержит датчик, при этом входной сигнал датчика содержит информацию о твердости окклюзии. В данном варианте датчик может быть прикреплен к колебательному элементу. Еще в одном примере реализации изобретения система содержит датчик, при этом входной сигнал датчика содержит информацию об амплитуде колебаний (достигнутая амплитуда) колебательного элемента. В данном варианте датчик может представлять собой магнитный датчик, прикрепленный к внутренней стенке катетера. Альтернативно, в данном варианте датчик может представлять собой магнитный датчик, прикрепленный к внутренней стенке полости датчика катетера. Еще в одном варианте примера реализации датчик может быть в рабочем состоянии соединен с колебательным элементом посредством магнитного стержня. Альтернативно, еще в одном варианте данного примера реализации изобретения датчик может быть в рабочем состоянии соединен с дистальным концом пружины посредством магнитного стержня.
[061] Система согласно настоящему изобретению может дополнительно содержать механизм управления нагрузкой для компенсации изменений формы катетера (т.е. изменений расстояния в катетере, которое должен проходить элемент натяжения) в процессе работы устройства. Например, при продвижении катетера через извилистый или криволинейный сосуд траектория, описываемая элементом натяжения, может быть изменена, например, отклонена по направлению к внутренней части кривой по сравнению с прохождением посередине полости. Это может приводить к наличию приблизительно 1% разницы в расстоянии от источника колебательной энергии до дистального элемента устройства и может таким образом влиять на эффективность натяжения элемента натяжения для осуществления колебаний колебательного элемента на дистальном конце катетера. Укорачивание траектории может приводить к уменьшению нагрузки на элемент натяжения, и будет необходима большая по величине амплитуда натяжения, задаваемая источником колебательной энергии для достижения постоянной нагрузки. Для приведения устройства в соответствие изменениям в траектории элемента натяжения и управления нагрузкой элемента натяжения, в одном примере реализации система может включать в себя механизм управления нагрузкой, который регулирует длину элемента натяжения. Таким образом, нагрузка элемента натяжения может быть поддержана на необходимом постоянном уровне для повышения эффективности устройства. Механизм управления нагрузкой может регулировать длину элемента натяжения. В предпочтительном варианте данного примера реализации изобретения длина элемента натяжения отрегулирована в области между корпусом катетера и двигателем источника колебательной энергии. В альтернативном примере реализации изобретения система может включать в себя механизм управления нагрузкой, который регулирует амплитуду натяжения элемента натяжения.
[062] Изобретение дополнительно относится к способу осуществления колебаний колебательного элемента. В одном примере реализации изобретения способ осуществления колебаний колебательного элемента включает этапы, согласно которым натягивают элемент натяжения от его проксимального конца для формирования нагрузки, прижимающей дистальный конец пружинного элемента по направлению к проксимальному концу пружинного элемента, при этом элемент натяжения прикреплен на дистальном конце к дистальному концу пружинного элемента, а пружинный элемент прикреплен на проксимальном конце к дистальному концу катетера, при этом элемент натяжения заключен в катетере, причем колебательный элемент функционально прикреплен к дистальному концу пружинного элемента, снимают нагрузку, сформированную элементом натяжения и таким образом обеспечивают возможность растяжения пружинного элемента, повторяют этапы натяжения и снятия нагрузки для осуществления влияния на колебания колебательного элемента. В одном из вариантов данного примера реализации изобретения этапы натяжения и снятия нагрузки выполняют посредством источника колебательной энергии. Согласно варианту данного примера реализации изобретения колебание имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, причем указанная по меньшей мере одна частота управляется посредством управляющего блока, функционально прикрепленного к источнику колебательной энергии. Еще в одном варианте примера реализации изобретения колебание имеет по меньшей мере одну частоту и по меньшей мере одну амплитуду, причем указанная по меньшей мере одна амплитуда управляется посредством управляющего блока, функционально прикрепленного к источнику колебательной энергии. Еще в одном варианте данного примера реализации изобретения способ осуществления колебаний колебательного элемента включает этапы, согласно которым берут элемент натяжения, пружинный элемент и колебательный элемент, причем колебательный элемент функционально прикреплен к дистальному концу пружинного элемента, натягивают элемент натяжения для формирования нагрузки, прижимающей дистальный конец пружинного элемента по направлению к проксимальному концу пружинного элемента, снимают нагрузку, сформированную элементом натяжения, и таким образом обеспечивают возможность растяжения пружинного элемента, повторяют указанные этапы натяжения и снятия нагрузки для осуществления колебаний колебательного элемента.
[063] Изобретение дополнительно относится к способу прохождения сквозь окклюзию сосуда. В одном из примеров реализации изобретения способ включает этапы, согласно которым вводят устройство в сосуд согласно настоящему изобретению, формируют последовательность тяговых усилий от источника колебательной энергии, воздействующих на элемент натяжения, для обеспечения колебаний колебательного элемента. В одном из примеров реализации изобретения способ дополнительно включает этапы, согласно которым помещают дистальный конец катетера в контакт с данной окклюзией, осуществляют колебания колебательного элемента с амплитудой и частотой, достаточными для прохождения сквозь данную окклюзию. В одном варианте данного примера реализации изобретения способ дополнительно содержит этап, согласно которому продвигают данное устройство сквозь окклюзию при прохождении колебательного элемента сквозь нее. Еще в одном примере реализации изобретения способ включает этап, согласно которому осуществляют колебания элемента с амплитудой и частотой, достаточными для обеспечения прохода катетера вокруг препятствий в сосуде или для продвижения его через извилистые части сосуда.
[064] Устройство согласно любому примеру реализации настоящего изобретения может дополнительно содержать датчик для измерения твердости окклюзии, сквозь которую осуществляется прохождение. На фиг. 2А-С показаны варианты датчиков ткани и их работа согласно настоящему изобретению. В частности, на фиг. 2А-С показан один из способов измерения, в котором определяется факт достижения необходимой амплитуды с использованием датчика ткани, содержащего зонд, тензометрический датчик и датчик касания. На фиг. 3 показан датчик для прямого измерения амплитуды колебаний колебательного элемента.
[065] Система может быть настроена оператором так, что может быть достигнуто желаемое смещение или амплитуда (А0) проникновения. Однако в случае, если приложенная сила не соответствует твердости окклюзии, заданная амплитуда А0 может быть не достигнута и достигнутая амплитуда (А) должна быть определена. Достигнутая амплитуда А может быть измерена посредством датчика одним из нескольких способов согласно приведенному ниже описанию, или данные способы будут очевидны для специалиста в данной области техники на основании приведенных далее примеров. Например, достигнутая амплитуда А может быть измерена прямым способом, например посредством использования тензометрического датчика или посредством измерения смещения дистального конца пружинного элемента 120. В аналогичных примерах реализации изобретения датчик может содержать зонд 151, тензометрический датчик 152 и датчик 153 касания, который, как показано на фиг. 2А-2С, измеряет твердость окклюзии отдельно от нагрузки на колебательном элементе. Альтернативно, датчик может содержать магнитный датчик 260, который может быть прикреплен непосредственно к колебательному элементу 230, как показано на примере, изображенном на фиг. 3, для измерения амплитуды колебаний колебательного элемента 230. В связи с тем, что устройство содержит пружинный элемент 220, который подвергается сжатию посредством натяжения элемента 210 натяжения и при снятии нагрузки происходит растяжение пружинного элемента 220 до положения, находящегося за пределами положения равновесия, амплитуда прохождения сквозь окклюзию может быть определена посредством измерения фактического расстояния, на которое пружинный элемент 220 растянут (достигнутая амплитуда А, на значение которой оказывает влияние сопротивление окклюзии), и сравнения с предполагаемым расстоянием, на которое пружинный элемент 220 растянут.
[066] Сила, необходимая для прохождения сквозь окклюзию, может быть определена с помощью Уравнения 2.
где F обозначает силу, приложенную к объекту, Е обозначает модуль Юнга (твердость или жесткость) окклюзии, S обозначает начальную площадь поперечного сечения, через которую приложена сила (т.е. площадь поперечного сечения зонда датчика), ΔL обозначает величину, на которую изменена длина объекта, a L0 обозначает исходную длину объекта. Для определения механических свойств материала окклюзии для регулирования частоты и амплитуды для прохождения сквозь нее должны быть измерены два параметра: сила (F) и смещение (L). Из других параметров Уравнения 2 известна S - площадь поперечного сечения зонда датчика (который может представлять собой проволочный проводник или другой элемент с известными размерами), при этом L - длина окклюзии неизвестна. Тем не менее сила, необходимая для прохождения сквозь материал неизвестной твердости, может быть определена, как показано на фиг. 2А-2С. Предложен катетер 140, пружинный элемент 120, прикрепленный к дистальному концу катетера 140, и датчик. Датчик содержит зонд 151, тензометрический датчик 152 и датчик 153 касания. В рабочем процессе устройства существует два режима: измерительный режим и колебательный режим. Первый режим представляет собой измерение, второй режим представляет собой колебание. В измерительном режиме датчик 153 касания помещен рядом с окклюзий 170 и касается ее, как показано на фиг. 2А (контакт, который может ощущать врач-оператор), измерительный режим включен. Измерительный режим представляет собой моноимпульсный режим, и зонд может проходить сквозь окклюзию.
[067] В связи с тем, что сила (F) находится в зависимости от массы (m) и ускорения (apeak), при колебании приложенная сила может быть определена по Уравнению 3:

Таким образом, по Уравнению 3 величина прилагаемой силы определяется смещением ΔL и частотой f. При задании определенного значения смещения ΔL (перемещение или амплитуда колебаний, эквивалентная перемещению дистального конца пружины), например 0,1 мм (значение, определенное с точки зрения безопасности), сила F может быть изменена посредством изменения частоты f. В начальной точке импульс силы может быть обеспечен на определенной частоте f и амплитуде А. На фиг. 2В показана приложенная сила, достаточная для прохождения сквозь окклюзию на полной глубине ΔL. Достижение заданного смещения может быть подтверждено магнитным датчиком, который может подавать сигналы, пропорциональные изгибу или деформации зонда (см. фиг. 3). В некоторых случаях элемент натяжения может быть выполнен из материала, который может быть подвергнут незначительному растяжению при превышении критического тягового усилия. Фактически маловероятно, что катетер будет полностью прямым, напротив, он может быть криволинейным или волнообразным вследствие формы полости тела, в особенности в кровеносных сосудах. Это означает, что начальное тяговое усилие, обеспечиваемое источником колебательной энергии, может быть поглощено в элементе натяжения в некоторой степени и не может быть принято за исходное значение для определения твердости окклюзии или заданной амплитуды А0. Кроме того, оператор может проталкивать катетер с неопределенной силой, которая не может быть управляема или немедленно измерена с помощью устройства. В подобных случаях не только длина окклюзии, но также и фактически приложенная сила на дистальном конце имеют приблизительные значения. Тем не менее в подобных обстоятельствах определение механических характеристик материала окклюзии может быть выполнено в относительных, а не абсолютных единицах, т.е. значения на дистальном конце могут быть градуированы на основании значений на проксимальном конце. В случае, в котором начальная входная сила колебаний принимает значение, равное F0 с амплитудой ΔL0 в проксимальной точке, она может достигать значения F1 с амплитудой ΔL1 в дистальной точке. Таким образом, в случае, в котором приложенная сила имеет достаточную величину для прохождения сквозь материал 170 окклюзии, глубина проникновения будет приблизительно равной значению перемещения ΔL1 или амплитуды, как показано на фиг. 2В. Напротив, в случае, в котором приложенная сила имеет недостаточную величину для полного прохождения сквозь окклюзию, зонд 151 может быть изогнут, как показано на фиг. 2С, и тензометрический датчик 152 может подавать соответствующий сигнал. В данном случае приложенная сила может быть увеличена посредством изменения ее частоты (механизм колебаний с зависимостью от частоты) или ее амплитуды (механизм колебаний с зависимостью от амплитуды).
[068] Магнитный датчик 260 может быть прикреплен к внутренней стенке 240 катетера или к внутренней стенке полости датчика внутри катетера и может быть в рабочем состоянии соединен с колебательным элементом 230 посредством магнитного стержня 262, как показано на фиг. 3. Магнитный стержень 262 может совершать перемещение при колебании колебательного элемента 230 посредством натяжения элемента 210 натяжения и снятия нагрузки с него. Амплитуда колебаний колебательного элемента 230 таким образом может быть измерена посредством магнитного датчика 260. Альтернативно, магнитный стержень 262 может быть соединен непосредственно с дистальным концом пружинного элемента 220 (пример реализации не показан). Еще в одном примере реализации изобретения магнитный датчик 260 непосредственно измеряет достигнутую амплитуду на дистальном конце катетера 240. Достигнутая амплитуда может быть меньше, чем заданная амплитуда, вследствие, например, сопротивления, возникающего при воздействии на окклюзию. Магнитный датчик 260, показанный на фиг. 3, представляет собой дифференциальный трансформатор для измерения линейных перемещений (LVDT) и иллюстрирует магнитный стержень 262, способный совершать перемещение внутри катушек 261 устройства LVDT, однако и другие магнитные датчики могут быть использованы для прямого измерения достигнутой амплитуды колебаний согласно настоящему изобретению.
[069] Изобретение относится к способу управления силой колебаний. На фиг. 4 показан один способ использования управляющего блока согласно настоящему изобретению для измерения амплитуды проникновения и регулирования амплитуды колебаний при необходимости. Понимание процесса управления частотой и амплитудой колебаний наилучшим образом возможно из описания процесса прохождения сквозь окклюзию, такую как сосудистая окклюзия. При использовании системы согласно настоящему изобретению для прохождения сквозь окклюзию сосуда весь процесс прохождения может быть осуществлен в виде последовательности циклов прохождения, в которых частота и заданная амплитуда определены заранее для инициирования колебаний в устройстве и затем отрегулированы посредством управляющего блока в течение цикла прохождения. Каждый цикл прохождения может включать последовательность колебательных «циклов», в которых эффективность вибрации может быть периодически измерена и сила может быть отрегулирована, при необходимости, способом, максимально увеличивающим безопасность и положительный результат прохождения. Согласно приведенному выше описанию в одном режиме работы необходимая амплитуда прохождения (перемещения) может быть задана на определенном расстоянии. Возможно использование управляющего блока системы согласно настоящему изобретению для контролирования достижения амплитудой прохождения заданного значения и для регулирования амплитуды и/или частоты колебаний для соответствующего увеличения силы колебаний согласно Уравнению 4.
Таким образом, в таком режиме работы в начале цикла прохождения устройство может быть размещено на первой поверхности окклюзии и может быть инициирована последовательность циклов (С) колебаний, причем управляющий блок управляет силой колебаний в ответ на информацию, поступающую от датчика посредством регулирования частоты и/или амплитуды колебаний. После прохождения сквозь первую поверхность устройство может быть продвинуто к следующей поверхности окклюзии и может быть начат новый цикл прохождения. Таким образом, прохождение сквозь поверхность окклюзии может быть выполнено пошаговым способом.
[070] В предпочтительном варианте реализации изобретения цикл прохождения (Р) начинают после инициирования управляющего блока управляющей информацией - значениями, относящимися к амплитуде, частоте и повторениям для регулирования колебаний. Управляющая информация может быть встроена в управляющий блок или может быть задана оператором.
В данном примере реализации изобретения, изображенном на фиг. 4, управляющий блок получает управляющую информацию от оператора, который задает начальное (заданное) смещение или амплитуду (А0) и максимальное смещение (Amax) - принимая во внимание вопросы безопасности, начальную частоту (f0) - на основе оценки плотности бляшки, максимальной частоты (fmax) и максимального количества повторений (Imax). Величина заданной амплитуды может принимать значение, например, примерно от 20 мкм до 200 мкм. Максимальная амплитуда может быть определена оператором, например, на основании диаметра полости и других параметров, известных специалисту в данной области техники. Начальная частота (f0) и максимальная частота (fmax) могут быть определены оператором на основании, например, конкретной окклюзии, сквозь которую будет выполнено прохождение, и физических ограничений системы и устройства, использующихся для этой цели. Управляющий блок предпочтительно имеет счетчик повторений для подсчета повторений, при которых происходит изменение силы колебаний. Отсчет повторений (I) не служит для измерения количества циклов (V) колебаний, а увеличивается только при увеличении частоты и/или амплитуды. Таким образом, цикл (С) колебаний может при необходимости включать этап регулирования частоты и/или амплитуды в зависимости от достигнутой амплитуды (см. ниже). Максимальное значение (Imax) повторений может также представлять собой меру безопасности (вследствие того, что оно может отражать увеличение силы колебаний согласно приведенному ниже описанию) или средство для обеспечения периодического доступа оператору к результату цикла прохождения и для регулирования процедуры при необходимости или выполнять обе функции. Последовательность циклов (С) колебаний в цикле (Р) прохождения предпочтительно протекает непрерывно вплоть до остановки цикла прохождения управляющим блоком или оператором. Таким образом, согласно приведенному описанию «начало» или «инициирование» цикла (С) колебаний означает точку в последовательности колебаний после сравнения значения достигнутой амплитуды с управляющей информацией. Протекание цикла (С) колебаний может быть определено единицами времени или количеством вибраций. А именно, цикл (С) колебаний может протекать в течение заданного временного промежутка (например, 5 секунд или 10 секунд) или содержать заданное количество колебательных пиков (частота × время, т.е. количество контактов воздействующего элемента с поверхностью окклюзии).
[071] Согласно примеру реализации управляющей схемы, показанному на фиг. 4, после получения управляющей информации управляющий блок устанавливает отсчет (I) повторений на нулевое значение (Шаг 1). Источник колебательной энергии выполнен с возможностью формирования тягового усилия, действующее на элемент натяжения для начала цикла (С) колебаний (Шаг 2). Предполагается, что тяговое усилие, имеющее рабочую амплитуду (Ai), обуславливает дистальное смещение за пределы положения равновесия пружины. Дистальное смещение или достигнутая амплитуда (А) будут измерены предпочтительно посредством датчика и будут периодически переданы для получения их значений управляющим блоком (Шаг 3), который выполняет сравнение достигнутой амплитуды (А) с заданной амплитудой (А0) (Шаг 4). В случае, в котором достигнутая амплитуда (А) меньше заданной амплитуды (А0), отсчет (I) повторений будет увеличен на единицу (Шаг 5а), т.е. I+1, и рабочая амплитуда (Ai) и/или рабочая частота (fi) будут увеличены (Шаг 6) для увеличения силы колебаний согласно Уравнению 5.
[072] где индекс ”i” обозначает текущее значение отсчета повторений.
Сила колеблющейся системы пропорциональна квадрату частоты и амплитуды согласно Уравнениям 4 и 5. Считается, что с клинической точки зрения обеспечение работы устройства на низкой амплитуде лучше и предпочтительно в пределах до 100 мкм (0,1 мм). Таким образом, для поддержания безопасности процедуры прохождения сквозь окклюзию предпочтительно увеличение силы посредством увеличения частоты, однако физическая конструкция устройства может накладывать ограничения на верхние пределы частоты. Поэтому для достижения подходящей силы для прохождения сквозь окклюзию частота или амплитуда может быть увеличена до максимальных значений, заданных в управляющей информации. Прирост амплитуды и/или частоты может быть увеличен приблизительно от 2% до 5% за каждое повторение. Таким образом, для заданного полного увеличения силы в цикле прохождения количество повторений может зависеть от доли прироста.
[073] После увеличения силы колебаний происходит сравнение отсчета (I) повторений с максимальным значением (Imax) повторений и сравнение рабочей амплитуды (Ai) и рабочей частоты (fi) с максимальной амплитудой (Amax) и максимальной частотой (fmax) соответственно (Шаг 7). В случае, в котором отсчет (I) повторений меньше максимального значения (Imax) повторений или рабочая амплитуда (Ai) меньшей максимальной амплитуды (Amax) и рабочая частота (fi) меньше максимальной частоты (fmax), инициирован следующий цикл (С) колебаний (Шаг 2) с новой рабочей амплитудой, новой рабочей частотой и новым отсчетом повторений; и достигнутая амплитуда (А) вновь получена (Шаг 3) и сравнена с начальным (заданным) смещением (А0) (Шаг 4), и цикл будет продолжен. Однако если после увеличения силы отсчет (I) повторений не меньше максимального значения (Imax) повторений и рабочая амплитуда (А) не меньше максимальной амплитуды (Amax) или рабочая частота (fi) не меньше максимальной частоты (fmax), то цикл (С) колебаний и цикл прохождения (Р) будут остановлены (Шаг 8) и устройство может быть расположено иным образом в полости и новый цикл прохождения будет запущен или прохождение сквозь окклюзию будет закончено.
[074] В случае, в котором после сравнения измеренного смещения (достигнутой амплитуды А) с заданной амплитудой (А0) (Шаг 4) достигнутая амплитуда (А) не меньше заданной амплитуды (А0), достигнутая амплитуда (А) будет сравнена с максимальной амплитудой (Amax) (Шаг 5b). Если достигнутая амплитуда (А) меньше максимальной амплитуды (Amax), отсчет повторений (1) устанавливают на ноль (Шаг 1) и инициируют новый цикл колебаний (Шаг 2) на той же рабочей частоте (fi) и с той же рабочей амплитудой (Ai) и т.д. Однако в случае, в котором достигнутая амплитуда (А) не меньше заданной амплитуды (А0) (Шаг 4) и не меньшей максимальной амплитуды (Amax) (Шаг 5b), цикл (С) колебаний и цикл прохождения (Р) останавливают (Шаг 8) и устройство может быть расположено иным способом в полости и новый цикл прохождения может быть запущен или прекращают прохождение сквозь окклюзию.
[075] Таким образом, предложен способ управления частотой и амплитудой колебаний, а следовательно, и силой колебаний устройства согласно настоящему изобретению. В одном из примеров реализации изобретения способ управления силой колебаний основан на элементах схемы, показанной на фиг. 4. Таким образом, один из способов управления силой колебаний включает этапы, согласно которым: а) получают начальные управляющие параметры, b) инициируют цикл повторений колебаний, включающий по меньшей мере одно натяжение и одно снятие нагрузки с элемента натяжения посредством источника колебательной энергии, достаточного для колебания колебательного элемента при силе (F) колебаний, причем элемент натяжения прикреплен к дистальному элементу, расположенному на дистальном конце пружинного элемента, а на проксимальном конце к указанному источнику колебательной энергии, причем пружинный элемент прикреплен на проксимальном конце к дистальному концу катетера, в катетере расположен элемент натяжения, и колебательный элемент прикреплен к дистальному концу пружинного элемента, причем натяжение и снятие нагрузки с указанного элемента натяжения влияет на сжатие и растяжение пружинного элемента, с) получают входное достигнутое значение амплитуды для указанного цикла повторений колебаний и d) регулируют силу колебаний в соответствии с достигнутым значением амплитуды. В одном варианте этап получения начальных управляющих параметров включает этапы, согласно которым (i) получают заданное входное значение амплитуды, ii) получают максимальное входное значение амплитуды, iii) получают начальное входное значение частоты, iv) получают максимальное входное значение частоты и v) получают максимальное входное значение повторений. В другом варианте при указанном инициировании: (i) инициируют отсчет повторений с нулевого значения и (ii) начинают цикл повторений колебаний в указанном устройстве, причем указанное по меньшей мере одно натяжение и одно снятие нагрузки происходит на начальной частоте и заданной амплитуде.
Еще в одном варианте при указанном регулировании (i) сравнивают достигнутое значение амплитуды с заданным значением амплитуды и с максимальным значением амплитуды, (ii) увеличивают отсчет повторений на один, когда достигнутое значение амплитуды меньше заданного значения амплитуды, устанавливают отсчет повторений на нулевое значение, когда достигнутое значение амплитуды не меньше заданного значения амплитуды, и
останавливают цикл повторений колебаний, когда достигнутое значение амплитуды не меньше заданного значения амплитуды и не меньше максимального значения амплитуды; и (iii) увеличивают силу колебаний посредством увеличения прироста частоты и/или амплитуды приблизительно на 2-5% в соответствии с уравнением 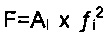 для формирования новой рабочей частоты (fi) и/или новой рабочей амплитуды (Ai) при увеличении отсчета повторений на один. Еще в одном варианте способ также включает этапы, согласно которым е) сравнивают отсчет повторений с максимальным значением повторений, сравнивают рабочую амплитуду с максимальным значением амплитуды и сравнивают рабочую частоту с максимальным значением частоты, f) инициируют новый цикл повторений колебаний в указанном устройстве: если отсчет повторений меньше максимального значения повторений или если рабочая амплитуда меньше максимального значения амплитуды и рабочая частота меньше максимального значения частоты, и g) останавливают цикл повторений колебаний: если отсчет повторений не меньше, чем максимальное значение повторений, и если рабочая амплитуда не меньше максимального значения амплитуды или рабочая частота не меньше максимального значения частоты.
для формирования новой рабочей частоты (fi) и/или новой рабочей амплитуды (Ai) при увеличении отсчета повторений на один. Еще в одном варианте способ также включает этапы, согласно которым е) сравнивают отсчет повторений с максимальным значением повторений, сравнивают рабочую амплитуду с максимальным значением амплитуды и сравнивают рабочую частоту с максимальным значением частоты, f) инициируют новый цикл повторений колебаний в указанном устройстве: если отсчет повторений меньше максимального значения повторений или если рабочая амплитуда меньше максимального значения амплитуды и рабочая частота меньше максимального значения частоты, и g) останавливают цикл повторений колебаний: если отсчет повторений не меньше, чем максимальное значение повторений, и если рабочая амплитуда не меньше максимального значения амплитуды или рабочая частота не меньше максимального значения частоты.
[076] Еще один способ управления силой колебаний включает этапы, согласно которым а) получают начальные управляющие параметры, b) инициируют цикл повторений колебаний, включающий по меньшей мере одно натяжение и одно снятие нагрузки с элемента натяжения, достаточного для колебаний колебательного элемента при силе (F) колебаний; с) получают входное достигнутое значение амплитуды для указанного цикла повторений колебаний и d) регулируют силу колебаний в соответствии с достигнутым значением амплитуды. Этап получения управляющей информации может дополнительно включать этапы, согласно которым (i) получают заданное входное значение амплитуды, ii) получают максимальное входное значение амплитуды; iii) получают начальное входное значение частоты, iv) получают максимальное входное значение частоты; и v) получают максимальное входное значение повторений. При указанном инициировании (i) инициируют отсчет повторений с нулевого значения; и (ii) начинают цикл повторений колебаний в указанном устройстве, причем указанное по меньшей мере одно натяжение и одно снятие нагрузки происходит на начальной частоте и заданной амплитуде. При указанном регулировании (i) сравнивают достигнутое значение амплитуды с заданным значением амплитуды и с максимальным значением амплитуды, (ii) увеличивают отсчет повторений на один, когда достигнутое значение амплитуды меньше заданного значения амплитуды, устанавливают отсчет повторений на нулевое значение, когда достигнутое значение амплитуды не меньше, чем заданное значение амплитуды, и останавливают цикл повторений колебаний, когда достигнутое значение амплитуды не меньше, чем заданное значение амплитуды, и не меньше, чем максимальное значение амплитуды, и
(iii) увеличивают силу колебаний посредством увеличения прироста частоты и/или амплитуды приблизительно на 2-5% в соответствии с уравнением для формирования новой рабочей частоты (fi) и/или новой рабочей амплитуды (Ai) при увеличении отсчета повторений на один. Данный пример реализации способа также может дополнительно включать этапы, согласно которым е) сравнивают отсчет повторений с максимальным значением повторений, сравнивают рабочую амплитуду с максимальным значением амплитуды и сравнивают рабочую частоту с максимальным значением частоты, f) инициируют новый цикл повторений колебаний в указанном устройстве: если отсчет повторений меньше максимального значения повторений или если рабочая амплитуда меньше максимального значения амплитуды и рабочая частота меньше максимального значения частоты, и g) останавливают цикл повторений колебаний: если отсчет повторений не меньше, чем максимальное значение повторений, и если рабочая амплитуда не меньше максимального значения амплитуды и рабочая частота не меньше максимального значения частоты.
[077] Еще в одном примере реализации изобретения способ включает этапы, согласно которым а) получают заданное входное значение амплитуды, максимальное входное значение амплитуды, заданное входное значение частоты, максимальное входное значение частоты и максимальное входное значение отсчета повторений, b) инициируют отсчет повторений с нулевого значения, с) инициируют цикл повторений колебаний, включающий по меньшей мере одно натяжение и одно снятие нагрузки с элемента натяжения, достаточные для колебаний колебательного элемента в течение одного повторения с силой (F) колебаний, d) получают достигнутое входное значение амплитуды для цикла повторений колебаний, е) сравнивают достигнутое значение амплитуды с заданным значением амплитуды, f) увеличивают отсчет повторений на единицу и увеличивают силу колебаний посредством увеличения прироста частоты и/или амплитуды приблизительно на 2-5% в соответствии с уравнением для формирования рабочей частоты (fi) и/или рабочей амплитуды (Ai), если достигнутое значение амплитуды меньше, чем заданное значение амплитуды, и затем переходят к этапу (j), g) сравнивают достигнутое значение амплитуды с максимальным значением амплитуды, когда достигнутое значение амплитуды не меньше, чем заданное значение амплитуды, h) инициируют отсчет повторений с нулевого значения, когда достигнутое значение амплитуды меньше максимального значения амплитуды, и продолжают способ с этапа (с), i) переходят к этапу (m) в случае, в котором достигнутое значение амплитуды не меньше максимального значения амплитуды, j) сравнивают отсчет повторений с максимальным отсчетом повторений, сравнивают рабочую амплитуду с максимальным значением амплитуды и сравнивают рабочую частоту с максимальным значением частоты, k) продолжают способ с этапа (с): в случае, в котором отсчет повторений цикла меньше максимального отсчета повторений, или в случае, в котором рабочая амплитуда меньше максимального значения амплитуды и рабочая частота меньше максимального значения частоты, l) переходят к этапу m): в случае, в котором отсчет повторений не меньше максимального отсчета повторений, и в случае, в котором рабочая амплитуда не меньше максимального значения амплитуды или рабочая частота не меньше максимального значения частоты, и m) останавливают цикл повторений колебаний.
[078] Вышеописанный пример реализации изобретения представляет собой только пример, не ограничивающий способы работы управляющего блока. Может быть использовано любое количество управляющих схем для регулирования частоты и/или амплитуды. Другие способы работы управляющего блока должны находиться в уровне техники относительно приведенного описания. Например, управляющая схема может включать этап, согласно которому уменьшают силу колебаний посредством уменьшения рабочей амплитуды в случае, в котором достигнутая амплитуда не меньше заданной амплитуды и не меньше максимальной амплитуды в течение по меньшей мере одного повторения перед остановкой цикла колебаний и цикла прохождения.
[079] Согласно приведенному выше описанию существует несколько способов измерения амплитуды (А). Это может быть осуществлено посредством использования датчика ткани для измерения твердости окклюзии или степени прохождения сквозь окклюзию или использования магнитного датчика для измерения смещения дистального конца пружинного элемента. Предпочтительно начало процедуры прохождения сквозь окклюзию происходит с минимальной силой, которая будет постепенно увеличена в зависимости от твердости материала. Кроме того, для расчета требуемой величины силы на основании отклика, содержащего информацию о твердости окклюзии, может быть использован управляющий алгоритм.
[080] По отношению к способу регулирования силы колебаний способ обработки сосуда с окклюзией может дополнительно содержать этапы, согласно которым регулируют частоту и/или амплитуду колебаний посредством управляющего блока на основании информации о твердости окклюзии посредством примера реализации способа управления силой колебаний согласно приведенному выше описанию. В предпочтительном варианте реализации способа при регулировании частоты колебаний для достижения подходящей силы на основании информации о твердости окклюзии или смещения дистального конца пружинного элемента устройство включает в себя датчик и твердость окклюзии и смещение пружины будут определены на основании информации, поступающей с датчика. В некоторых примерах реализации изобретения этап регулирования может быть выполнен вручную.
В других примерах реализации изобретения этап регулирования может быть выполнен автоматически. В частности, способ может включать этап, согласно которому проводят обработку кровеносного сосуда с хронической полной окклюзией.
[081] Таким образом, изобретение относится в одном из примеров реализации к способу прохождения сквозь окклюзию в полости тела, включающему этапы, согласно которым (а) вводят в полость тела с окклюзией катетер, содержащий пружинный элемент, колебательный элемент и элемент натяжения, причем пружинный элемент имеет проксимальный и дистальный концы и прикреплен на его проксимальном конце к дистальному концу катетера и прикреплен на его дистальном конце к колебательному элементу, причем элемент натяжения имеет проксимальный и дистальный концы и прикреплен на его дистальном конце к дистальному элементу, расположенному на дистальном конце пружинного элемента, который в рабочем состоянии соединен на его проксимальном конце с источником колебательной энергии, обеспечивающим возможность натяжения элемента натяжения и снятия нагрузки с него, (b) продвигают катетер до того, как произойдет контакт колебательного элемента с первой поверхностью окклюзии, (с) формируют последовательность этапов натяжения и снятия нагрузки посредством источника колебательной энергии, достаточных для осуществления колебаний колебательного элемента, причем последовательность этапов натяжения и снятия нагрузки содержит по меньшей мере одну частоту и по меньшей мере одну амплитуду, и (d) используют колебания колебательного элемента для прохождения сквозь первую поверхность окклюзии. Еще в одном примере реализации изобретения способ дополнительно содержит этапы, согласно которым (е) останавливают колебания (f) продвигают катетер для обеспечения его контакта с новой поверхностью окклюзии; (g) повторяют этапы (a)-(d) до прохождения сквозь новую поверхность окклюзии; и (h) повторяют этапы (а)-(g) до полного прохождения сквозь окклюзию.
[082] Способ может дополнительно включать этап, согласно которому регулируют по меньшей мере одну частоту и/или по меньшей мере одну амплитуду колебаний посредством управляющего блока в зависимости от твердости окклюзии. В одном из вариантов катетер содержит датчик и твердость окклюзии может быть определена на основе информации, полученной от указанного датчика. Еще в одном примере реализации изобретения способ дополнительно включает этап, согласно которому регулируют по меньшей мере одну частоту и по меньшей мере одну амплитуду колебаний посредством управляющего блока на сновании амплитуды колебаний колебательного элемента. В одном из вариантов катетер содержит датчик и амплитуда колебаний может быть определена на основе информации, полученной от указанного датчика. Еще в одном варианте реализации любого из приведенных выше примеров реализации изобретения этап регулирования может быть выполнен вручную. Еще в одном дополнительном варианте любого из приведенных выше примеров реализации изобретения этап регулирования может быть выполнен автоматически. Еще в одном варианте полость тела представляет собой кровеносный сосуд.
[083] Согласно приведенному выше описанию очевидно, что устройство и система совместимы с проволочными проводниками, которые подходят для направления катетера через полость тела, в частности для направления катетера через кровеносный сосуд. Жесткие проволочные проводники использованы в уровне техники для восстановления проходимости кровеносного сосуда с окклюзией. В некоторых случаях врачи предпочитают использовать жесткий проволочный проводник для прохождения сквозь сосудистую окклюзию, но также необходимы дополнительные средства для обеспечения прохождения сквозь окклюзию в случаях, в которых прохождение затруднено и, возможно, проблема состоит в безопасности. Предложены устройство и система согласно настоящему изобретению, которые имеют эти дополнительные средства; устройство и система согласно настоящему изобретению совместимы с жестким проволочным проводником в дополнение к системе растягиваемой проволоки/пружинного элемента для прохождения сквозь окклюзии сосуда, в том числе полные хронические окклюзии. Кроме того, изобретение относится к способу обработки полостей тела с хроническими полных окклюзиями посредством замещения способа прохождения сквозь окклюзию согласно приведенному выше описанию способом, подразумевающим использование наконечника проволочного проводника для прохождения сквозь окклюзию. Таким образом, в одном варианте способа обработки окклюзии катетер содержит жесткий проволочный проводник и способ дополнительно включает этапы, согласно которым продвигают жесткий проволочный проводник для прохождения сквозь поверхность окклюзии попеременно с этапами (c)-(d). В другом варианте способ обработки окклюзии дополнительно содержит этапы, согласно которым продвигают жесткий проволочный проводник для прохождения сквозь поверхность окклюзии попеременно с шагом (с), формируют последовательность циклов натяжения и снятия нагрузки посредством источника колебательной энергии, достаточную для осуществления колебаний колебательного элемента, причем последовательность циклов натяжения и снятия нагрузки содержит по меньшей мере одну частоту и по меньшей мере одну амплитуду и колебательный элемент расположен на дистальном конце пружинного элемента, и (d) используют колебания колебательного элемента для прохождения сквозь первую поверхность окклюзии.
[084] Специалисту в данной области будет очевидно, что для показанного и описанного посредством примеров реализации изобретения устройства существуют различные варианты, дополнения, модификации и другие приложения без отступления от сущности или объема изобретения. Таким образом, подразумевается, что объем изобретения, определяемый приведенной ниже формулой изобретения, включает в себя все предусмотренные варианты, дополнения, модификации и приложения.
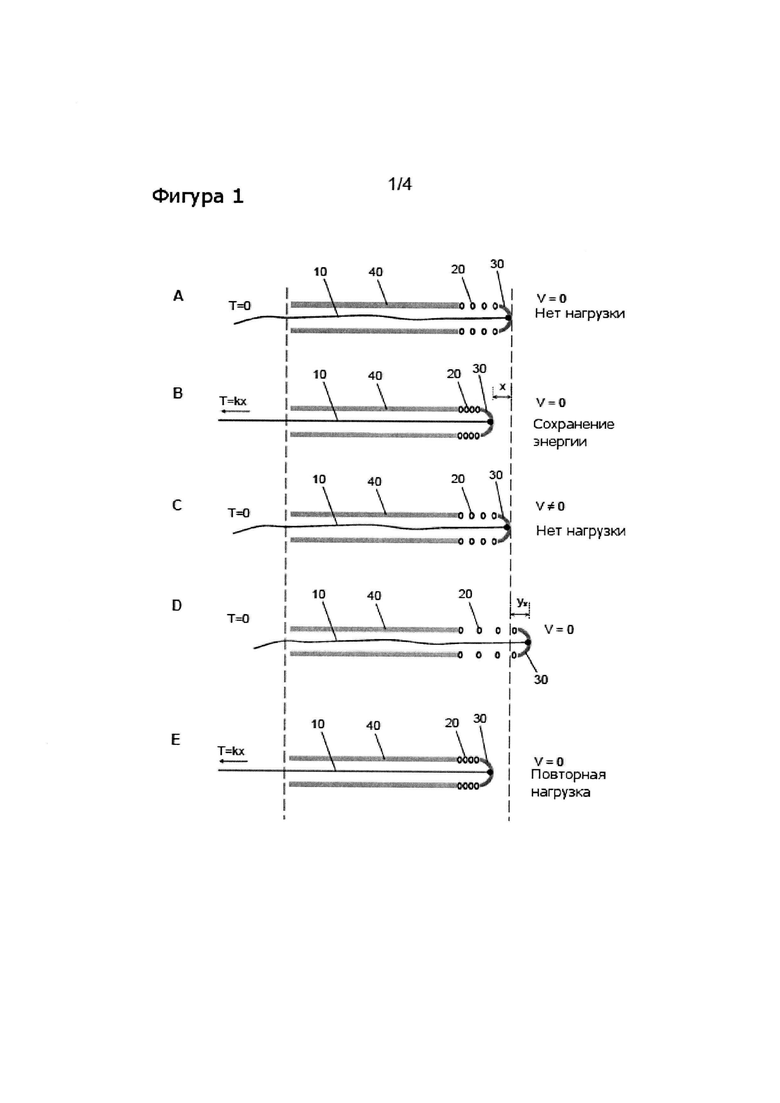
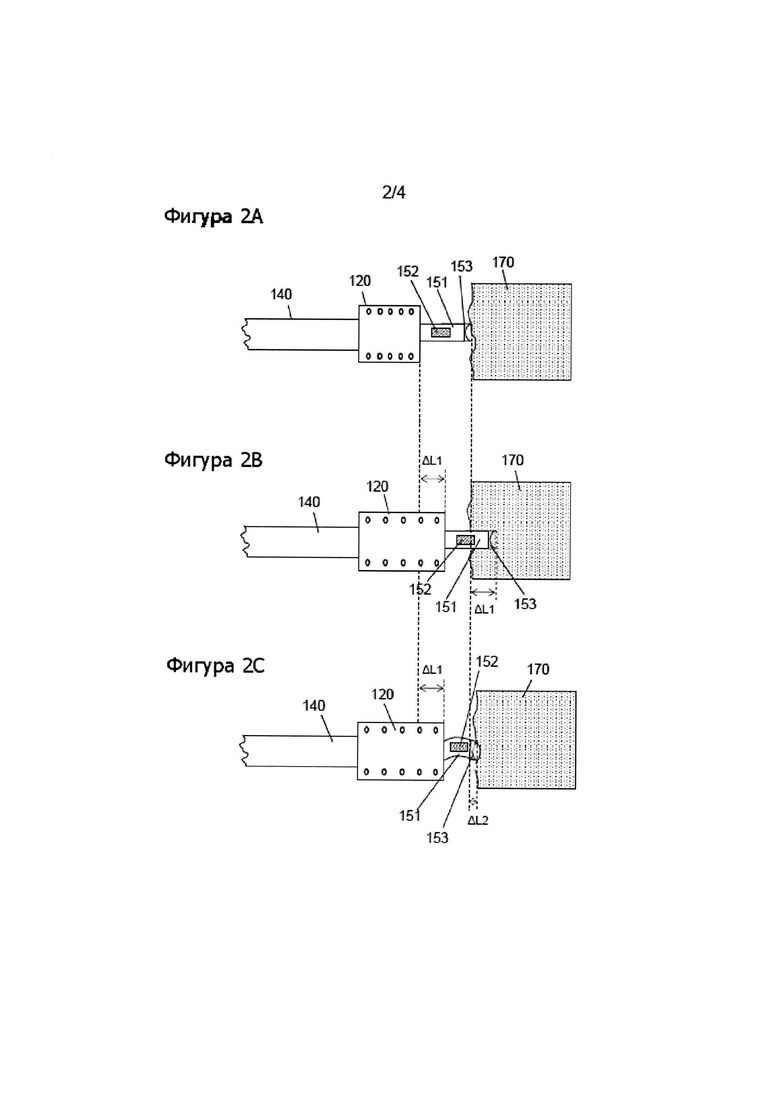
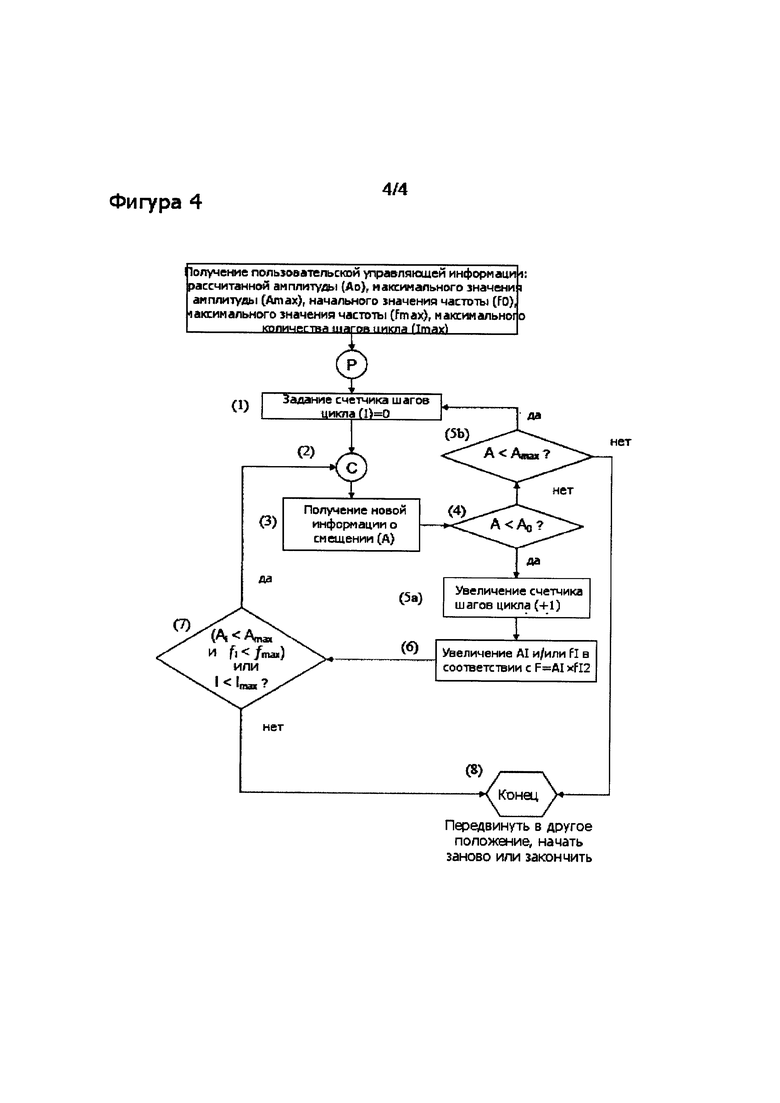
Изобретение относится к медицинской технике. Система для прохождения окклюзии сосудов содержит устройство, содержащее катетер с проксимальным и дистальным концами и пружинный элемент с проксимальным и дистальным концами. Проксимальный конец пружинного элемента прикреплен к дистальному концу катетера. Элемент натяжения расположен в катетере. Дистальный конец элемента натяжения прикреплен к дистальному элементу, а элемент натяжения функционально соединен с указанным дистальным концом пружинного элемента. Колебательный элемент образует дистальный элемент или соединен с ним. Источник колебательной энергии соединен в рабочем состоянии с проксимальным концом элемента натяжения и выполнен с возможностью формирования колебания в колебательном элементе посредством элемента натяжения и пружинного элемента с помощью натяжения указанного элемента натяжения или снятия с него нагрузки. Управляющий блок выполнен с возможностью управления источником колебательной энергии. Согласно этапам управления получают начальные управляющие параметры, инициируют цикл повторений колебаний, включающий натяжение и снятие нагрузки с элемента натяжения посредством источника колебательной энергии, достаточного для колебания колебательного элемента при силе колебаний, получают входное достигнутое значение амплитуды для указанного цикла повторений колебаний и регулируют силу колебаний в соответствии с достигнутым значением амплитуды. Изобретение обеспечивает облегчение прохода катетера через кровеносные сосуды. 13 з.п. ф-лы, 4 ил.
1. Система для прохождения окклюзии сосудов, содержащая:
устройство, содержащее:
катетер с проксимальным и дистальным концами,
пружинный элемент с проксимальным и дистальным концами, при этом проксимальный конец пружинного элемента прикреплен к дистальному концу катетера,
элемент натяжения, расположенный в катетере, с проксимальным и дистальным концами, при этом дистальный конец элемента натяжения прикреплен к дистальному элементу, а элемент натяжения функционально соединен с указанным дистальным концом пружинного элемента,
колебательный элемент, образующий дистальный элемент или соединенный с ним, и
источник колебательной энергии, соединенный в рабочем состоянии с проксимальным концом элемента натяжения и выполненный с возможностью формирования по меньшей мере одного колебания в колебательном элементе посредством элемента натяжения и пружинного элемента с помощью натяжения указанного элемента натяжения или снятия с него нагрузки,
управляющий блок, выполненный с возможностью управления источником колебательной энергии,
причем управляющий блок выполнен с возможностью управления силой колебаний посредством этапов, согласно которым:
a) получают начальные управляющие параметры,
b) инициируют цикл повторений колебаний, включающий по меньшей мере одно натяжение и одно снятие нагрузки с элемента натяжения посредством источника колебательной энергии, достаточного для колебания колебательного элемента при силе (F) колебаний, причем элемент натяжения прикреплен к дистальному элементу, расположенному на дистальном конце пружинного элемента, а на проксимальном конце к указанному источнику колебательной энергии, причем пружинный элемент прикреплен на проксимальном конце к дистальному концу катетера, в катетере расположен элемент натяжения и колебательный элемент прикреплен к дистальному концу пружинного элемента,
причем натяжение и снятие нагрузки с указанного элемента натяжения влияет на сжатие и растяжение пружинного элемента,
c) получают входное достигнутое значение амплитуды для указанного цикла повторений колебаний и
d) регулируют силу колебаний в соответствии с достигнутым значением амплитуды.
2. Система по п. 1, в которой при получении начальных управляющих параметров:
i) получают заданное входное значение амплитуды,
ii) получают максимальное входное значение амплитуды,
iii) получают начальное входное значение частоты,
iv) получают максимальное входное значение частоты и
v) получают максимальное входное значение повторений.
3. Система по п. 1, в которой при указанном инициировании
(i) инициируют отсчет повторений с нулевого значения и
(ii) начинают цикл повторений колебаний в указанном устройстве, причем указанное по меньшей мере одно натяжение и одно снятие нагрузки происходит на начальной частоте и заданной амплитуде.
4. Система по п. 1, в которой при указанном регулировании
(i) сравнивают достигнутое значение амплитуды с заданным значением амплитуды и с максимальным значением амплитуды,
(ii) увеличивают отсчет повторений на один, когда достигнутое значение амплитуды меньше заданного значения амплитуды,
устанавливают отсчет повторений на нулевое значение, когда достигнутое значение амплитуды не меньше заданного значения амплитуды,
останавливают цикл повторений колебаний, когда достигнутое значение амплитуды не меньше заданного значения амплитуды и не меньше максимального значения амплитуды, и
(iii) увеличивают силу колебаний посредством увеличения прироста частоты и/или амплитуды приблизительно на 2-5% в соответствии с уравнением F=Ai׃i2 для формирования новой рабочей частоты (ƒi) и/или новой рабочей амплитуды (Ai) при увеличении отсчета повторений на один.
5. Система по п. 4, в которой также
e) сравнивают отсчет повторений с максимальным значением повторений, сравнивают рабочую амплитуду с максимальным значением амплитуды и сравнивают рабочую частоту с максимальным значением частоты,
f) инициируют новый цикл повторений колебаний в указанном устройстве: если отсчет повторений меньше максимального значения повторений или если рабочая амплитуда меньше максимального значения амплитуды и рабочая частота меньше максимального значения частоты, и
g) останавливают цикл повторений колебаний: если отсчет повторений не меньше максимального значения повторений и если рабочая амплитуда не меньше максимального значения амплитуды или рабочая частота не меньше максимального значения частоты.
6. Система по п. 1, в которой управляющий блок выполнен с возможностью получения сигналов от датчика твердости окклюзии ткани, соединенного с пружинным элементом.
7. Система по п. 6, в которой датчик твердости окклюзии ткани выбран из группы, состоящей из следующего: тензометрический датчик, пьезорезистор, датчик микронапряжений и магнитный датчик.
8. Система по п. 6, в которой датчик твердости окклюзии ткани содержит зонд, тензометрический датчик и датчик касания для прямого измерения твердости окклюзии.
9. Система по п. 6, в которой датчик твердости окклюзии ткани выполнен с возможностью прямого измерения твердости окклюзии.
10. Система по п. 6, в которой датчик твердости окклюзии ткани выполнен с возможностью непрямого измерения твердости окклюзии.
11. Система по п. 1, в которой катетер представляет собой катетер с множеством полостей.
12. Система по п. 1, в которой элемент натяжения выполнен из полимерного материала с высокой прочностью.
13. Система по п. 1, в которой пружинный элемент представляет собой пластинчатую пружину, сформированную в виде плотно закрытой пружины с покрытием или рифленой трубки, содержащей пружину сжатия.
14. Система по п. 13, в которой пластинчатая пружина выполнена с возможностью сжатия при нагрузке от элемента натяжения и с возможностью растяжения при снятии указанной нагрузки.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| DE 4036570 A, 21.05.1996 | |||
| Устройство для дозирования материалов | 1972 |
|
SU443256A1 |
| US 2005119606 A1, 02.06.2005 | |||
| US 2009292296 A1, 26.11.2009 | |||
| ЭЛЕКТРОКАТЕТЕР ДЛЯ ПОБУЖДЕНИЯ СТЕНОЗА СОСУДА, ИМЕЮЩИЙ ДВА МНОЖЕСТВА РАСХОДЯЩИХСЯ ЭЛЕКТРОДОВ | 1999 |
|
RU2207823C2 |

