Изобретение относится к определению местоположения объектов, зарытых в землю, погруженных под воду или находящихся в труднодоступных местах, в частности, к определению местоположения объектов путем активирования меток типа RFID, прикрепленных к этим объектам. Изобретение наиболее предпочтительно для определения местоположения пластиковых труб.
Определение местоположения объектов, зарытых в землю или погруженных под воду, зачастую представляет трудность для людей, находящихся на поверхности. Необходимость в таком определении местоположения возникает, в частности, при проведении работ, связанных либо с доступом к водопроводным или газовым трубам, либо с недопущением их повреждения, либо с обновлением планов прокладки сетей. Определение местоположения на основании одних лишь планов, составленных при прокладке труб, обычно оказывается бесполезным ввиду недостоверности планов, ввиду утери планов или ввиду неконтролируемой перекладки труб (например, из-за подвижности грунтов или земляных работ).
Ввиду отсутствия непосредственного доступа к трубам был разработан определенный порядок действий, направленных на повышение эффективности определения их местоположения с поверхности. Известная процедура определения местоположения, в частности, заключается в креплении RFID-меток к трубам в ключевых местах заранее и в последующем определении местоположения этих меток с поверхности при помощи считывателя меток.
За счет определения положения различных меток в горизонтальном направлении и по глубине, в частности, можно восстановить в трехмерном виде подземную сеть труб. Наличие меток в отдельных точках сети (например, в местах ответвлений или сгибов труб) упрощает восстановление планов.
Известны несколько режимов связи между считывателем и RFID-меткой. В этих системах канал связи устанавливается посредством радиочастотного магнитного поля между считывателем и одной или более метками.
ВЧ- и СВЧ-излучающие антенны, размер которых составляет порядка половины длины волны частоты канала связи, восприимчивы как к компоненту магнитного поля, так и к компоненту электрического поля. Связь между считывателем и меткой в значительной мере зависит от конструкции антенны метки и антенны считывателя. Кроме этого, с учетом расстояний, которые превышают длину волны электромагнитного поля, и с учетом электромагнитных характеристик среды, в которой находится метка, СВЧ приводят к тому, что диаграммы направленности являются более сложными и более подвержены искажениям. Наличие влаги в среде дополнительно увеличивает поглощение волн. В результате надежность определения местоположения значительно снижается.
Ввиду этих ограничений, желательно использовать в данной области антенны индукционного типа. Связь между считывателем и RFID-метками, например, определяется стандартами ISO 15693 и ISO 18000-3 на частоте 13.56 МГц.
В случае индукционных антенн взаимодействие между антенной считывателя и антенной метки можно выразить уравнениями индуктивной связи (при квазистатическом подходе и с использованием вычисления взаимных индуктивностей). Индуктивная связь вызывает передачу энергии между считывателем и меткой посредством взаимной индукции.
Рамочный проводящий контур метки «отводит» магнитный поток, создаваемый антенной считывателя. Изменение во времени магнитного потока создает в этом рамочном контуре индуцированное напряжение, называемое ЭДС (электродвижущая сила). Это напряжение выпрямляется и, в целом, используется для электропитания функций метки.
Рамочный контур антенны обладает индуктивностью. Эта индуктивность используется в сочетании с емкостным элементом, добавляемым для формирования параллельного резонатора. Тогда напряжение на выходах резонатора является произведением индуцированного напряжения на коэффициент перенапряжения (соответствующий общему коэффициенту добротности резонатора), тем самым, обеспечивается запитка интегральной схемы метки. Для дистанционного запитывания интегральной схемы идентификационной RFTD-метки требуется минимальное напряжение (и мощность), обычно порядка нескольких вольт при пиковых значениях и несколько сотых микроватта. Таким образом, существует минимальное значение магнитного поля, прикладываемого к антенне метки, при превышении которого метка становится функциональной и может отвечать на запросы считывателя.
Для осуществления передачи данных с метки на считыватель в метке изменяется импеданс между выходными контактами контура антенны. Изменение импеданса обнаруживается считывателем посредством индуктивной связи.
Известно несколько способов обнаружения, в которых оператор использует RFID считыватель для определения местоположения подземных RFID-меток.
Под зоной обнаружения предполагается значение объема (или при углублении площадь земной поверхности), где RFTD-метка может считываться считывателем. Связь с меткой возможна, если центр антенны считывателя находится внутри этого объема, и невозможна, если центр антенны находится за пределами этого объема. Геометрия зоны обнаружения (форма и размер) зависит от характеристик метки (расположения и чувствительности) и характеристик антенны считывателя, а также от уровня магнитного поля, создаваемого этой антенной.
В патенте JP 2005181111 RFID-метки неподвижно прикреплены к зарытым в землю трубам. Считыватель, когда он оказывается в зоне обнаружения, определяет местоположение метки путем установления связи с последней. Соответственно, считыватель получает информацию о глубине, которая была ранее заложена в метку. Считыватель определяет примерное горизонтальное положение метки за счет того, что считыватель находится в зоне обнаружения.
Такой способ определения местоположения оказывается относительно неточным в плане определения горизонтального положения и не позволяет определять фактическую глубину метки. Поэтому часть получаемой информации о глубине оказывается неточной в случае проведения земляных работ на поверхности грунта или перемещения труб в результате различных событий, степень вероятности этого отклонения достаточно высока для труб, срок службы которых зачастую составляет от 30 до 50 лет.
Другой известный способ определения местоположения основан на установлении связи между считывателем и низкочастотной (от 80 до 120 кГц) RFID-меткой, в этих областях применения предпочтительно использование антенны индукционного типа. Низкая частота соответствует длинам волн, которые значительно превышают расстояния при определении местоположения. Этот способ часто используется для меток, снабженных простыми резонаторами и не имеющих электронных чипов. Резонатор метки создает вторичное магнитное поле, пропорциональное первичному магнитному полю, создаваемому антенной считывателя.
Увеличение и затухание амплитуды вторичного поля происходит в зависимости от постоянной времени, зависящей от коэффициента добротности резонатора. Амплитуда вторичного поля, измеряемая считывателем, относительно мала по сравнению с амплитудой первичного магнитного поля. Для того чтобы можно было осуществить измерение вторичного поля, первичное поле излучается лишь кратковременно, а измерение вторичного поля осуществляется во время периодов отсутствия первичного поля. Для того чтобы амплитуда вторичного поля продолжала оставаться значительной на протяжении достаточного длительного периода времени при прекращении первичного поля, резонатор метки имеет достаточно высокий коэффициент добротности (обычно от 50 до 100).
Горизонтальное положение метки или выравнивание по отвесу определяется путем сканирования поверхности грунта считывателем. Горизонтальное положение метки определяется, когда амплитуда вторичного поля достигает максимума.
Поскольку метки с простым резонатором не способны сообщать считывателю свою конфигурацию, считывателю, помимо прочего, приходится решать задачу с двумя неизвестными: интенсивностью излучения вторичного магнитного поля и глубиной залегания метки. Для определения этих двух неизвестных оператор помещает считыватель по отвесу над меткой и выполняет измерения на двух заданных высотах над землей.
Для обеспечения точности измерений вторичного поля, измерение последнего осуществляют несколько раз и на основании полученных разных значений рассчитывают среднюю величину. Однако из-за используемых низких значений частоты связи, на практике продолжительность, необходимая для выполнения оператором измерений вторичного поля, оказывается достаточно длительной и составляет несколько секунд. После выравнивания по отвесу с меткой эта длительность увеличивается вдвое, для того чтобы измерения вторичного поля выполнять на двух заданных высотах. Поэтому, для того чтобы слишком не затягивать определение местоположения, определение места выравнивания с меткой по отвесу также приходится выбирать примерно там, где вторичное поле имеет максимальную амплитуду. Помимо прочего, точность такого способа в значительной мере зависит от внешних магнитных возмущения на смежных частотах (например, возмущения от вторичных источников), а амплитуда вторичного поля, измеряемая считывателем, остается крайне незначительной.
Изобретение направлено на решение одного или нескольких из указанных недостатков. Изобретение, таким образом, относится к устройству определения местоположения, которое оценивает расстояние от RFID-метки до границы раздела между двумя средами, при этом метка находится с противоположной стороны от устройства определения местоположения относительно границы раздела. Устройство определяется прилагаемой формулой изобретения.
Изобретение также относится к способу определения местоположения RFID-метки относительно границы раздела между двумя средами, причем метка находится с противоположной стороны от устройства определения местоположения относительно границы раздела, способ определяется прилагаемой формулой изобретения.
Другие признаки и преимущества изобретения станут понятны из его описания, предлагаемого исключительно в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, где:
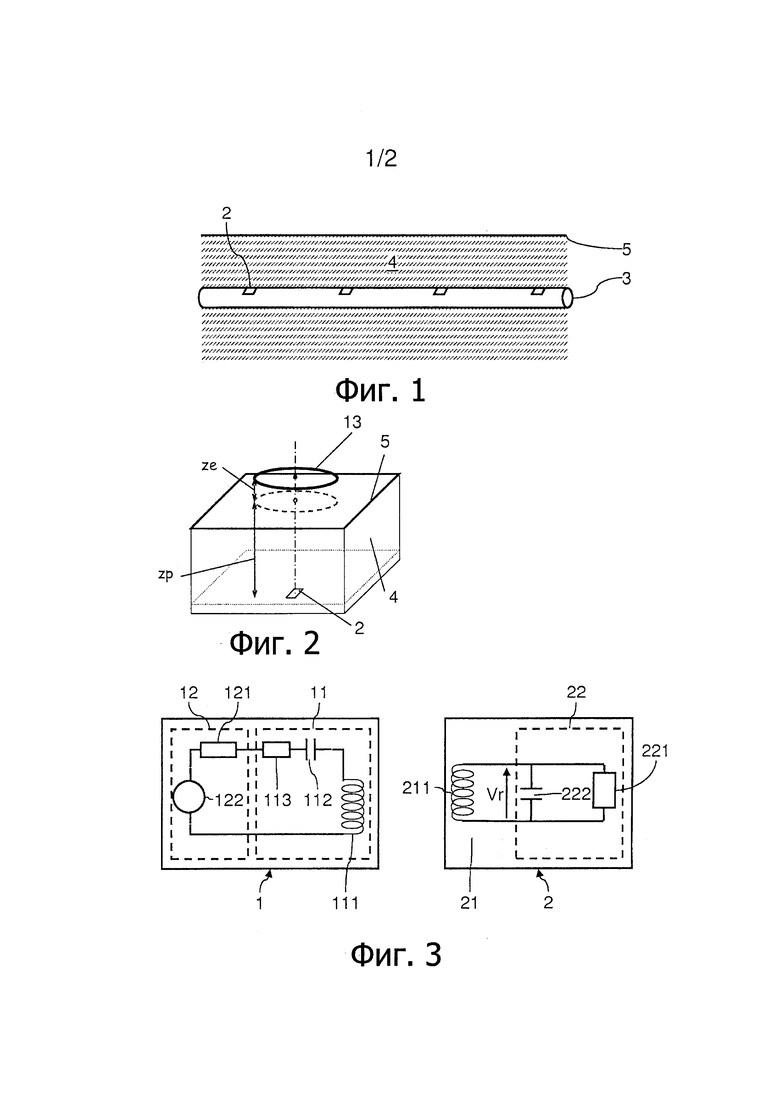
фиг. 1 - схематичное представление подземной трубы, местоположение которой определяется, снабженной RFID-метками;
фиг. 2 - схематичное представление этапа определения местоположения RFID-метки и связанные с этим различные параметры;
фиг. 3 - эквивалентная электрическая схема связи считывателя и RFID-метки, оба являются устройствами индукционного типа, по одному из вариантов осуществления устройства определения местоположения по изобретению;
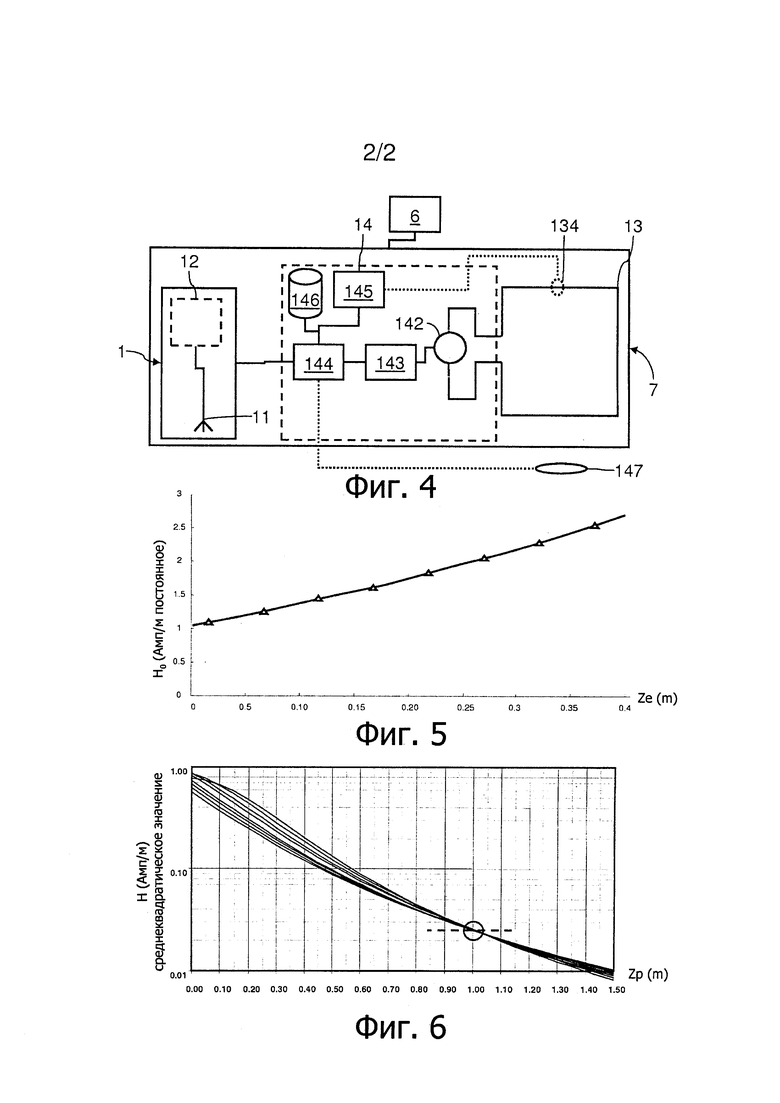
фиг. 4 - блок-схема устройства согласно одному из вариантов осуществления изобретения;
фиг. 5 - график уровня электромагнитного поля, создаваемого антенной, для разных предельных расстояний обнаружения;
фиг. 6 - график, представляющий различные кривые электромагнитного поля на уровне метки в зависимости от расстояния между меткой и границей.
Определение местоположения метки согласно настоящему изобретению основано на определении различных минимальных значений электромагнитного поля для обнаружения метки в зависимости от различных положений устройства определения местоположения, создающего электромагнитное поле.
Изобретением предлагается решение для определения местоположения RFID-меток, обладающее высокой точностью и вместе с тем простотой в использовании. Такое определение местоположения может не зависеть от изменения параметров метки, например, вследствие ее старения.
Настоящее решение по определению местоположения является достаточно дискриминирующим в отношении других источников вторичного поля или других возможных RFID-меток. Кроме этого, настоящее решение особенно легко использовать в реальных условиях. Более того, изобретение позволяет осуществлять определение местоположения даже при наличии подземных препятствий, создающих относительные пространственные ограничения для проведения измерений.
В описании позже будет рассмотрено обнаружение горизонтального положения метки, а затем обнаружение ее глубины относительно горизонтальной поверхности. Между тем, изобретение также относится к определению расстояния между меткой и негоризонтальной границей. Граница обеспечивает разделение между двумя средами, метка и устройство находятся по разные стороны от границы. Рассматриваемое устройство обнаружения, таким образом, обладает:
- функцией определения положения в отношении по существу планарной границы раздела, в проекции на эту границу вдоль нормали;
- функцией оценки расстояния между меткой и границей.
Изобретение обычно может использоваться для обнаружения подземных труб. На фиг. 1 схематически изображена подземная труба 3, зарытая в подземную среду 4, такую как землю. Верхняя поверхность земли 4 образует границу 5 между двумя средами, в данном случае разного характера, а именно - землей 4 и воздухом. RFID-приемопередатчики или метки 2 неподвижно прикреплены в соответствующих местах к трубе 3, например, через равные промежутки, в местах ответвлений или изгибов трубы 3. В этих условиях используются метки 2, способные функционировать под землей или во влажной среде.
На фиг. 2 показано положение антенны 13 устройства для определения местоположения метки 2, зарытой в землю 4. В данном случае антенна 13 расположена над меткой 2 по вертикали. На фиг. 2 ze обозначает расстояние между антенной 13 и землей 5, обозначение zp относится к расстоянию между землей 5 и меткой 2. Рассматриваемое устройство определения местоположения предназначено для оценки этого расстояния zp и/или положения вертикальной линии, совмещенной с меткой 2.
Определение местоположения метки по настоящему изобретению основано на определении различных минимальных значений электромагнитного поля для обнаружения метки в зависимости от разных положений антенны устройства определения местоположения, создающей электромагнитное поле.
По одному из вариантов осуществления изобретения устройство определения местоположения включает в себя устройство обнаружения отклика от метки 2. В данном варианте осуществления устройство обнаружения отклика выполнено в виде RFID-считывателя 1.
На фиг. 3 схематически показан пример традиционной электрической схемы считывателя 1 и индуктивно соединенной бесконтактной RFID-метки 2, для которой требуется определить местоположение.
У RFID-считывателя 1 антенный контур 11 может быть смоделирован с помощью эквивалентной антенной индуктивности 111, последовательно соединенной с сопротивлением 113 и конденсатором 112. Антенный контур 11 соединен с электронной схемой 12 считывателя 1. Выходной импеданс RFID-считывателя 1 может быть смоделирован с помощью сопротивления 121, последовательно соединенного с антенным контуром 11 и источником 122 питания.
Со стороны метки 2, антенный контур 21 может быть смоделирован эквивалентной индуктивностью 211. Антенный контур 21 соединен с электронной схемой 22. Электронная схема 22 содержит конденсатор 222. Электропотребление этой электронной схемы может быть смоделировано с помощью сопротивления 221, соединенного параллельно с эквивалентной индуктивностью 211.
Индуктивная связь вызывает передачу энергии между считывателем и меткой за счет взаимной индукции. В результате в метке 2 индуцируется переменное напряжение или электродвижущая сила. Это напряжение выпрямляется и используется для энергообеспечения функций метки 2. Напряжение, имеющееся на выходах этого резонатора, является произведением индуцированного напряжения на коэффициент перенапряжения (соответствующий, в целом, коэффициенту добротности резонатора), таким образом запитывается интегральная схема метки 2. Для дистанционного запитывания интегральной схемы метки 2 и ее функционирования требуется минимальное напряжение, обычно порядка нескольких вольт при пиковом значении. Таким образом, существует минимальное магнитное поле, действующее на антенну метки 2, свыше которого метка становится функциональной и может отвечать на запросы считывателя.
Руководство по проектированию RFID-систем индукционного типа определены, в частности, стандартами ISO 15693, ISO 18000-3 и ISO 14443. Эти стандарты устанавливают, в частности, несущую частоту сигнала в 13.56 МГц. Для осуществления передачи данных с метки 2 на RFID-считыватель 1 метка изменяет известным образом импеданс, который проявляется на выходах антенного контура. За счет индуктивной связи считыватель обнаруживает это изменение импеданса. Считыватель 1, таким образом, способен обнаруживать отклик или отсутствие отклика от метки 2.
Во время определения местоположения метки 2 считыватель периодически осуществляет поиск для обнаружения отклика от метки 2. Через равные интервалы радиочастотное поле считывателя 1 активируется путем возбуждения антенны синусоидальным напряжением на его резонансной частотой в течение заданного периода времени. Во время активного состояния считыватель направляет несколько повторных запросов по стандартному протоколу. После этих запросов поле считывателя 1 поддерживается активным для обнаружения возможного отклика от метки 2.
На фиг. 4 показана блок-схема устройства 7 определения местоположения RFID-метки по одному из вариантов осуществления изобретения. Устройство 7 включает в себя считыватель 1, показанный на фиг. 1, антенну 13 и схему 14 дистанционного управления.
Антенна 13 является антенной индукционного типа. Антенна 13 предпочтительно оптимизирована для работы на поверхности земли (со слабым влиянием земли). Антенна 13 может быть любого соответствующего типа, например такой, как описано в документе FR2961354. Антенна имеет, по существу, форму прямоугольного или кругового контура. Антенна 13 предпочтительно снабжена токовым зондом 134.
Схема 14 дистанционного управления содержит источник 142 питания, соединенный с выходами антенны 13. Управляющая схема 143 определяет электропитание, подаваемое от источника 142 питания в схему 13 антенны, и, следовательно, амплитуду электромагнитного поля, создаваемого антенным контуром. Схема 14 дистанционного управления также содержит обрабатывающую схему 144 и измерительную схему 145. Измерительная схема 145 получает измерения от токового зонда 134. Хотя функции схем 143, 144 и 145 рассмотрены по отдельности, некоторые из этих функций, разумеется, могут быть реализованы в одной интегральной схеме. Устройство 7 также содержит память 146.
Устройство 7 содержит датчик 147 расстояния между антенной 13 и границей 5 между двумя средами, в данном случае датчик, указывающий расстояние ze между антенной 13 и землей 5. Такой датчик 147 сам по себе известен и может быть оптическим датчиком (например, использующим лазерный луч), акустическим датчиком (например, сонарного типа) или радио датчиком (радарного типа). Устройство 7 также может быть снабжено уровнем, позволяющим оператору проверить горизонтальность антенны 13 во время определения местоположения. Датчик 147 соединен с обрабатывающей схемой 144. Устройство 7 включает в себя или соединено с дисплеем 6, отображающим оператору, в частности, значение расстояния zp и, при необходимости, инструкции, которые должен выполнить оператор.
Как вариант, устройство 7 может не иметь никаких датчиков для измерения расстояния ze между антенной 13 и землей 5. В этом случае устройство 7 может определять расстояние ze при помощи других средств. Устройство 7 может, например, посредством дисплея 6 передать запрос оператору на размещение устройства 7 на заданном расстоянии от земли. В этом случае оператор может расположить устройство 7 на требующемся расстоянии, поместив, например, клинья откалиброванной толщины между устройством 7 и землей 5 или используя регулируемую по высоте треногу, на которой устройство 7 может быть неподвижно закреплено, снабженную градуированной шкалой, указывающей расстояние между устройством 7 и землей 5 для заданной регулировки. Пользователь может подтвердить расположение устройства 7 на требуемом расстоянии, нажав соответствующую кнопку, таким образом, чтобы устройство 7 могло определить, что оно находится на заданном расстоянии от земли 5.
Устройство 7 предпочтительно содержит датчик уровня поля на антенне 13. Этот датчик позволяет узнать фактический уровень электромагнитного поля, создаваемого антенной 13 для того, чтобы можно было учесть возможные флуктуации импеданса этой антенны 13 и уровня питания, подаваемого источником 142 питания на эту антенну 13. Также как и на изображенном примере этот датчик может быть выполнен в виде токового зонда 134, измеряющего ток, проходящий через антенну 13.
Принцип определения местоположения метки 2 устройством 7 основан на свойстве метки 2 начинать функционирование и направлять отклик при превышении порога электромагнитного поля (для угловой частоты ю), подаваемого на ее антенну (Hs). Это пороговое значение является средней величиной, прикладываемой перпендикулярно поверхности антенны метки 2, которая создает достаточное индуцированное напряжение (e.m.f. ЭДС) в контуре антенны, так чтобы схема 22 метки запитывалась минимальным напряжением Vps, приводящим ее в действие, в отношении функции передачи эквивалентного резонатора (характеризуемого коэффициентом Q добротности и подстраиваемой угловой частотой ω0).

S - сечение антенного контура метки 2, пересекаемое потоком электромагнитного поля.
Например, это напряжение Vps обычно составляет порядка нескольких вольт среднеквадратического значения (r.m.s.). Величина Hs обычно составляет порядка от нескольких десятых до нескольких сотых мАмп/м среднеквадратического значения, в зависимости от параметров антенны метки.
Далее будет считаться, что данная величина Hs электромагнитного поля является постоянной в течение всего процесса определения местоположения метки 2, при этом данная величина необязательно известна заранее.
Во время первого этапа определяют положение вертикальной линии, совмещенной с меткой 2, на поверхности 5. Когда метка 2 надлежащим образом ориентирована (плоскость ее антенны расположена горизонтально) и на последнюю не воздействует возмущение от находящегося рядом с ней в земле проводящего объекта больших размеров, зона обнаружения метки 2 имеет, в общем, форму эллипса.
Для осуществления этого этапа управляющая схема 143 может управлять начальной подачей высокого или максимального питания от источника 142 питания. Как только обрабатывающая схема 144 детектирует отклик от метки 2, она определяет, что антенна 13 находится в зоне обнаружения метки для данной мощности питания. Эта информация может быть передана оператору через дисплей 6. Затем управляющая схема 143 управляет подачей питания меньшей мощности и сообщает оператору о том, что происходит более точное определение положения совмещенной вертикальной линии. Оператору предлагается перемещать устройство 7 по горизонтали до тех пор, пока оно не окажется в более ограниченной зоне обнаружения метки 2. Как только обрабатывающая схема 144 получит отклик от метки 2 при уменьшенной мощности питания, он определит, что антенна 13 находится в зоне обнаружения метки 2 и сообщит об этом оператору. Путем повторения этих этапов и уменьшения мощности питания, устройство 7 может сузить зону обнаружения метки 2 до относительно ограниченной области на поверхности земли (обычно 50×50 мм). Обрабатывающая схема 144 сохраняет в памяти минимальную величину Р0, при которой все еще детектируется отклик от метки 2. Положение вертикальной линии, совмещенная с меткой 2, таким образом, может быть определено с высокой точностью, более того, без проведения расчетов.
Во время второго этапа определяют расстояние zp до метки 2 от земли 5 по этой вертикальной совмещенной линии путем определения минимальной излучаемой мощности антенны 13, при которой происходит обнаружение метки 2, для разных расстояний ze расположения устройства 7 над указанным местом вертикальной линии, совмещенной с меткой 2.
По первому варианту оператор должен расположить антенну 13 на земле 5 (для этого указания могут передаваться через дисплей 6) в положении вертикальной линии, совмещенной с меткой 2, для выполнения первой серии измерений. Затем оператору предлагается поднимать антенну 13 на разные расстояния ze над землей для проведения новой серии измерений. Обрабатывающая схема 144 может, например, посредством дисплея 6 предлагать оператору поднимать антенну 13 с шагом в 50 мм. Обрабатывающая схема 144 может предлагать оператору поднимать антенну и удерживать антенну 13 на данном расстоянии ze во время осуществления измерений, обрабатывающая схема 144 определяет данное расстояние до антенны 13 при помощи датчика 147 или путем подтверждения этого расстояния пользователем через соответствующий интерфейс.
Для разных расстояний ze управляющая схема 143, таким образом, управляет подачей разного питания от источника 142 питания на антенну 13, разные значения питания, превосходящие величину Р0, заложены в память. Разные значения мощности можно подавать в виде повторяющихся последовательностей запросов/откликов, определяемых протоколом RFID-связи. Для каждого расстояния ze обрабатывающая схема 144 определяет минимальную мощность источника 142 питания, при которой поступает отклик от метки 2, при этом выше определенной мощности отклик от метки 2 не поступает.
Для каждого измеренного расстояния ze обрабатывающая схема 144 запоминает значение электромагнитного поля, измеренного на антенне 13 для этой минимальной мощности. Для каждого измеренного расстояния ze обрабатывающая схема 144, таким образом, запоминает в памяти 146 результат измерений в виде пары Ek=(zek; Hk), где k - индекс измерения, zek - величина, соответствующая расстоянию ze, a Hk - амплитуда поля на антенне 13, измеренная на этом расстоянии zek при минимальной мощности, при которой происходит обнаружение.
По второму варианту оператору предлагается поместить антенну 13 на землю 5 (для этого выводятся указания на дисплей 6) в месте положения вертикальной линии, определенной для метки 2. Затем обрабатывающая схема 144 начинает повторяющуюся последовательность запросов/ответов для определения предельного расстояния ze обнаружения при разных уровнях мощности. Оператору предлагается медленно поднимать антенну до расстояния d, при этом dmin<d, dmin определяется требуемой точностью оценки расстояния между меткой 2 и землей 5.
В этом варианте питание, подаваемое источником 142 питания на антенну 13, начинается со значения, по меньшей мере равного сохраненному в памяти значению Р0, а затем увеличивается до различных дискретных значений. После того как оператор поднимает антенну 13, обрабатывающая схема контур 144 определяет расстояние zek, до которого питание Pk, подаваемое на антенну, позволяет получать отклик от метки 2. После прекращения обнаружения метки 2 питание от источника 142 питания увеличивают шагово до Pk+1, так чтобы определить расстояние zek+1.
Для каждого определяемого предельного расстояния zek обрабатывающая схема 144 сохраняет в памяти 146 результат измерения в виде пары Ek=(zek; Hk).
При подтверждении каждого предельного расстояния обнаружения zek, предельное расстояние обнаружения может быть признано недействительным: если предельное расстояние идентифицируется, последовательность измерений временно продолжается при той же мощности для того, чтобы проверить, что обнаружение метки 2 не происходит при большем расстоянии ze. Предельное расстояние zek подтверждается, если после него не происходит обнаружение расстояния ze, которое является большим для этой мощности.
По третьему варианту оператор должен положить антенну 13 на землю 5 в месте положения вертикальной линии, определенной для метки 2. После этого обрабатывающая схема 144 начинает повторяющуюся последовательность запросов/ответов для определения предельного расстояния ze обнаружения при разных значениях мощности. Оператору предлагается медленно поднимать антенну до расстояния d, при этом dmin<d, dmin определяется требуемой точностью оценки расстояния zp между меткой 2 и землей 5.
В этом варианте питание, подаваемое источником 142 питания на антенну 13, начинается со значения, по меньшей мере равного сохраненному в памяти значению Р0. После того как антенна 13 поднята при подаче этой мощности и после того как в результате нескольких запросов/ответов не удается обнаружить метку 2, управляющая схема 143 дает указания об увеличении мощности.
Для каждого предельного расстояния ze, определенного при увеличении мощности питания, обрабатывающая схема 144 сохраняет в памяти 146 результат измерения в виде пары Fk=(zek; Hk).
Если после нескольких последовательных запросов/ответов удается обнаружить метку 2, управляющая схема 143 дает указание уменьшить мощность. Во время уменьшения мощности обрабатывающая схема 144 определяет предельное расстояние ze и минимальную мощность, соответствующую пределу обнаружения метки 2. После определения предельного расстояния ze и предельной мощности, на антенну 13 снова подается увеличивающаяся мощность.
Для подтверждения того, что измеренная мощность и измеренное расстояние действительно соответствуют пределу обнаружения, мощность временно продолжают уменьшать для того, чтобы убедиться, что при уменьшенной мощности и увеличенном расстоянии ze не происходит новых обнаружений.
Для каждого предельного расстояния ze, определенного при увеличении мощности питания, обрабатывающая схема 144 сохраняет в памяти 146 результат измерения в виде пары Ek=(zek; Hk).
Скорость увеличения и уменьшения питания является достаточно высокой для того, чтобы подъем антенны 13 не влиял на уменьшение амплитуды поля метки 2 на уровне этой антенны 13.
Различие между измерениями Ек и Fk позволяет учитывать пороги обнаружения, которые могут немного отличаться при переходе от состояния обнаружения к состоянию отсутствия обнаружения по сравнению с переходом от состояния отсутствия обнаружения к состоянию обнаружения (явление запаздывания по отношению к порогам). Поэтому первый расчет расстояния zp может быть осуществлен на основе измерений Ek, а второй расчет расстояния zp может быть осуществлен на основе измерений Fk. Принимаемое расстояние zp может быть средним от значений, полученных в результате этих двух расчетов.
Для этих вариантов максимальное расстояние подъема антенны 13 может быть установлено либо на основании эргономической величины (например, 400 или 500 мм над землей), либо по расстоянию, при котором поле, создаваемое антенной 13, оказывается недостаточным для получения отклика от метки 2.
Предпочтительно, уровень мощности, подаваемой источником 142 питания на антенну 13, синхронизирован с величиной тока, проходящего через антенну 13 и измеряемого токовым зондом 134. Источник 142 питания может получать команды от управляющей схемы 143 по подаче дискретной мощности питания на антенну 13. Эти мощности могут, например, соответствовать квадратичной прогрессии (например, со следующими значениями в ваттах: [0.5, 1, 1.5, 2, 3, 4, 5, 6, 7.5, 9, 10.5, 12] или следующими значениями: [0.5, 1, 1.5, 2, 2.5, 3, 3.5, 4, 4.5, 5, 5.5, 6, 6.5, 7.5, 8, 9, 9.5, 10.5, 11, 12] или следующими значениями: [0.5, 0.75, 1, 1.25, 1.5, 1.75, 2.25, 2.5, 3, 3.5, 4, 4.5, 5, 5.5, 6.25, 6.75, 7.5, 8.25, 9, 9.75, 10.5, 11.25, 12.25]), так чтобы радиочастотное поле, создаваемое антенной 13, было по существу линейным.
Определение местоположения метки может включать в себя предварительный этап установления связи с меткой (режим инвентаризации). Затем определение местоположения метки может осуществляться при помощи идентификатора этой метки (например, адресный режим).
На основании опроса метки 2 посредством ее идентификации с целью ее обнаружения можно осуществлять обнаружение метки даже в том случае, если отклик, получаемый измерительной схемой контуром 145, сильно искажен. Таким образом, можно максимально сократить ситуации, когда мощности излучения антенны 13 оказывается достаточно для получения отклика от метки 2 без регистрации отклика от метки считывателем. Этот способ обнаружения оказывается особенно удобен для зашумленной среды, когда отклик от метки, получаемый антенной 13, может сильно искажаться.
За счет предварительного опроса метки 2, когда содержимое формы отклика метки 2 известно, последняя может быть задана в заранее известном стандарте связи. Например, можно произвести расчет корреляции между ожидаемой формой отклика и откликом, измеренным измерительной схемой 145 и идентифицированным обрабатывающей схемой 144. Обрабатывающая схемой 144, например, может определить, что метка обнаружена, если рассчитанное значение корреляции достигает заданного порогового значения. В конечном счете, даже если отклик, полученный от метки 2, содержит ошибки (например, тест на циклическую избыточность содержит ошибки), тем не менее, можно считать, что отклик от метки 2 получен, а следовательно, считать ее обнаруженной.
Типовое определение расстояния zp будет, в частности, рассмотрено для высокочастотного электромагнитного поля. За основу взята частота связи в 13.56 МГц, длина волны которой в вакууме составляет около 22 м. Во влажном грунте эта длина волны делился на 5, т.е. длина волны составляет около 4 м. Следовательно, при разумной аппроксимации можно использовать традиционные уравнения для статических магнитных полей. Кроме того, считается, что наличие грунта не влияет на магнитное поле, создаваемое антенной 13.
При таком упрощенном моделировании поле Н, воздействующее на метку 2, выражается следующим уравнением:
где Н0 - магнитное поле, создаваемое устройством 7 в звуковом центре антенны 13, Rant - радиус антенны, если антенна имеет круговую форму, a z - полное расстояние между центром антенны и центром метки 2, т.е. z=(ze+zp).
Предельное расстояние zelim периода между обнаружением метки и отсутствием обнаружения при подъеме антенны устройства 7 связано с уровнем высокой частоты антенны 13, характеризующимся, например, полем Н0, создаваемым в центре антенны 13. Тогда порог электромагнитного поля для активации метки выражается следующим уравнением:
Таким образом, можно рассчитать уровень Н0 поля в зависимости от предельного подъема zelim и, таким образом, например, определить точки {Hk,dk} посредством следующего уравнения:
Соответствующая кривая может быть построена по меньшей мере при помощи квадратичной процедуры. Значения, полученные при помощи такой процедуры для параметров Hs и zp, могут оказаться недостаточно точными, тем не менее, можно определить качество измерения по отклонению измеряемых точек относительно этой кривой. На фиг. 5 изображен этот график, на котором уровни Н0 поля увеличиваются на 0.2 мА/м с свыше 1.1 мА/м с.
Для каждой пары или точки измерений приведенного выше примера (8 пар значений {Hk,dk}), можно оценить магнитное поле, создаваемое антенной 13 в грунте 4, от поверхности 5 до достаточного расстояния (например, 1.5 м), когда эта антенна 13 находится на расстоянии ze=dk и через антенный контур проходит ток, так что поле, которое он создается в центре антенны, равно Н0=Hk. Таким образом, получают серию кривых, которые проходят через точку, соответствующую искомому расстоянию под землей 5, при этом значение поля в этой точке соответствует порогу поля метки 2, как это показано на фиг. 6.
Исходя из этого, способ определения расстояния zp можно выразить следующим образом. Модель поля, создаваемого антенной 13 на некотором расстоянии по вертикали от антенны, можно выразить следующим уравнением:
При использовании результатов измерений, сохраненных в памяти 146, аномальные результаты измерений, необязательно, первоначально могут игнорироваться. Поэтому результаты измерений, слишком сильно отклоняющиеся от модели, приведенной, например, на графике по фиг. 5, исключаются. Если слишком большое количество результатов измерений отклоняется от модели, обрабатывающая схемой 144 может решить, что оценка расстояния между меткой 2 и землей 5 недостоверна и запросить оператора провести повторные измерения.
Для каждого сохраненного в памяти результата измерений предела обнаружения рассчитывается примерное электромагнитное поле, создаваемое в земле устройством 7, когда антенна находится на расстоянии zek, сохраненном в памяти 146. Для этой цели используется модель распределения поля, создаваемого антенной устройства 7. Также можно сохранять в памяти эталонные профили электромагнитного поля и экстраполировать распределение искомого электромагнитного поля для различных измерений путем интерполирования между сохраненными в памяти профилями. Как показано на фиг. 6, для разных измерений можно определить распределение поля антенны устройства 7 по вертикальной линии, совмещенной с меткой 2. При каждом измерении строится диаграмма поля на уровне метки 2 в зависимости от расстояния до поверхности. Расстояние zp определяется путем определения расстояния, отмеченного пересечением нескольких этих диаграмм. На практике количество пересечений равно N*(N-1)/2, где N - число диаграмм или сохраненных в памяти результатов измерений. Единственное пересечение можно определить путем интерполирования между множеством рассчитанных пересечений, исключая при необходимости отдельные пересечения, имеющие слишком большой разброс по отношению к другим.
Такой способ определения расстояния zp предпочтительно не зависит от характеристик метки 2 (коэффициента добротности и подстроечной частоты антенны) и их изменения во времени в зависимости от старения или изменения условий грунта или климата.
Использование высоких частот связи (в диапазоне от 3 до 30 МГц) позволяет существенно сократить время определения местоположения, а следовательно, удобно для оператора устройства. Сокращение периода определение местоположения также положительно влияет на точность измерений, поскольку оператор во время сокращенного периода проведения измерений также будет совершать меньшее количество движений. Этот диапазон частот позволяет преодолеть обычное техническое предубеждение относительно того, что приемлемого распространения волн в такой среде как земля или вода добиться трудно.
В изображенном примере измерение тока, проходящего через антенну 13, используется в качестве параметра, характеризующего поле, создаваемое этой антенной. Также можно использовать любой другой характеризующий поле параметр, например, магнитометр, измеряющий поле, создаваемое на уровне антенны 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ НЕИСПРАВНОГО ИЗОЛЯТОРА | 2013 |
|
RU2542674C1 |
| АККУМУЛИРУЮЩАЯ ЭНЕРГИЮ RFID-СХЕМА, RFID-МЕТКА С ФУНКЦИЕЙ АККУМУЛИРОВАНИЯ ЭНЕРГИИ И СВЯЗАННЫЕ С НИМИ СПОСОБЫ | 2017 |
|
RU2742197C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ИЗОЛЯТОРОВ В ТРУДНОДОСТУПНЫХ УЧАСТКАХ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2771083C1 |
| АНТЕННА | 2018 |
|
RU2754305C2 |
| УПРАВЛЕНИЕ БОЛЬШИМ КОЛИЧЕСТВОМ RFID-МЕТОК В КРИОГЕННОМ КОНТЕЙНЕРЕ | 2018 |
|
RU2761541C2 |
| СПОСОБ ОТВОДА ЛЕСОСЕК | 2015 |
|
RU2623484C2 |
| СПОСОБ БЕССПУТНИКОВОЙ НАВИГАЦИИ | 2016 |
|
RU2642507C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ НАЛИЧИЯ И СОСТОЯНИЯ КОММУТИРУЮЩИХ ТОКОПРОВОДЯЩИХ ЭЛЕМЕНТОВ И ХРАНЕНИЯ ИНФОРМАЦИИ ОБ ОСНОВНЫХ АГРЕГАТАХ ЛОКОМОТИВА | 2023 |
|
RU2805895C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УРОВНЕЙ ГРАНИЦ КОМПОНЕНТОВ НЕФТИ В РЕЗЕРВУАРЕ | 2021 |
|
RU2754207C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УМНОГО ДИСПЛЕЯ РОЗНИЧНОЙ ТОРГОВЛИ | 2016 |
|
RU2718238C2 |
Изобретение относится к определению местоположения объектов, зарытых в землю, погруженных под воду или находящихся в труднодоступных местах, в частности, к определению местоположения объектов путем активирования меток типа RFID, прикрепленных к этим объектам. Устройство содержит антенну (13) индукционного типа; устройство (147) для определения расстояния между антенной (13) указанного устройства (7) и границей раздела; схему (142, 143) подачи питания, выполненную с возможностью подачи питания на антенну (13) таким образом, чтобы антенна создавала электромагнитное поле с различными последовательными значениями амплитуды; устройство (1) для обнаружения отклика от метки; обрабатывающую схему (144), выполненную с возможностью определения нескольких пар, каждая из которых включает в себя расстояние, которое определено между антенной (13) и границей раздела; и минимальное значение электромагнитного поля, создаваемое на уровне антенны, при котором метка обнаруживается на указанном расстоянии; и с возможностью оценки расстояния между меткой и границей раздела в зависимости от указанных пар, которые определены. 2 н. и 15 з.п. ф-лы, 6 ил.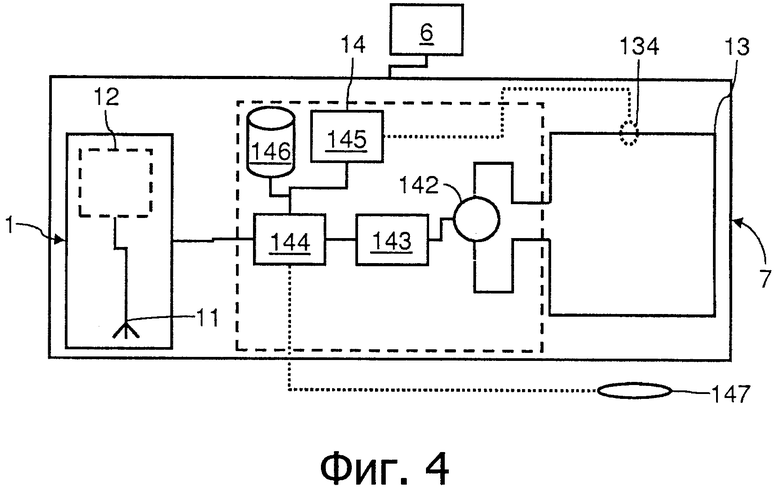
1. Устройство (7) для определения расстояния от RFID-метки до границы раздела между двумя средами, причем метка находится с противоположной стороны от указанного устройства определения относительно границы раздела, содержащее:
антенну (13) индукционного типа;
устройство (147) для определения расстояния между антенной (13) указанного устройства (7) и границей раздела;
схему (142, 143) подачи питания, выполненную с возможностью подачи питания на антенну (13) таким образом, чтобы антенна создавала электромагнитное поле с различными последовательными значениями амплитуды;
устройство (1) для обнаружения отклика от метки;
обрабатывающую схему (144), выполненную с возможностью:
определения нескольких пар, каждая из которых включает в себя:
расстояние, которое определено между антенной (13) и границей раздела; и
минимальное значение электромагнитного поля, создаваемое на уровне антенны, при котором метка обнаруживается на указанном расстоянии;
и с возможностью оценки расстояния между меткой и границей раздела в зависимости от указанных пар, которые определены.
2. Устройство по п. 1, содержащее память, включающую нормализованные соотношения между расстоянием от метки до указанной границы раздела и электромагнитным полем, создаваемым антенной (13) на этом расстоянии от границы раздела (5), при этом обрабатывающая схема выполнена с возможностью оценивать расстояние (zp) между меткой (2) и границей раздела на основе указанных хранящихся в памяти соотношений и указанных определенных минимальных значений электромагнитного поля.
3. Устройство (7) по п. 1, в котором обрабатывающая схема (144) выполнена с возможностью:
определения, для нескольких из указанных пар, соотношения между расстоянием от метки до границы раздела и электромагнитным полем, создаваемым антенной (13) на этом расстоянии от границы раздела (5);
и с возможностью оценки расстояния (zp) между меткой (2) и границей раздела как соответствующего пересечению между несколькими определенными соотношениями.
4. Устройство по п. 3, в котором указанная обрабатывающая схема выполнена с возможностью формировать указанное соотношение по меньшей мере для трех из указанных пар и оценивать расстояние (zp) между меткой (2) и границей раздела путем интерполирования указанных пересечений между указанными соотношениями.
5. Устройство (7) по любому из пп. 1-4, содержащее датчик для измерения тока (134), проходящего через антенну (13), при этом обрабатывающая схема (144) выполнена с возможностью определения электромагнитного поля, создаваемого на уровне антенны (13), в зависимости от измеренного тока.
6. Устройство по любому из пп. 1-4, в котором обрабатывающая схема (144) выполнена с возможностью определения каждой из указанных пар посредством команд на формирование нескольких величин магнитного поля для одного и того же расстояния, которое определено между антенной (13) и границей раздела (5), и сохранения для каждой пары наименьшего значения магнитного поля, позволяющего обнаруживать метку на указанном соответствующем определенном расстоянии.
7. Устройство по любому из пп. 1-4, в котором обрабатывающая схема (144) выполнена с возможностью определения каждой из указанных пар посредством команд на формирование одной и той же величины магнитного поля для разных расстояний, которые определены между антенной (13) и границей раздела (5), и сохранения для каждой пары максимального значения расстояния, позволяющего обнаруживать метку при указанном соответствующем значении магнитного поля.
8. Устройство по любому из пп. 1-4, в котором обрабатывающая схема (144) выполнена с возможностью определения каждой из указанных пар посредством направления команд во время изменения расстояния между антенной (13) и границей раздела (5):
- при обнаружении отклика от метки, посредством команды на формирование поля с последовательно уменьшающимися величинами поля до тех пор, пока отклик от метки не исчезнет;
- при отсутствии отклика от метки, посредством команды на формирование поля с последовательно увеличивающимися величинами поля до тех пор, пока отклик от метки не появится.
9. Устройство по п. 6, содержащее интерфейс для обмена данными с пользователем (6), при этом обрабатывающая схема (124) выполнена с возможностью передавать запросы через указанный коммуникационный интерфейс на перемещение антенны (13).
10. Устройство по любому из пп. 1-4, в котором антенна (13) и схема (142) подачи питания выполнены с возможностью создания электромагнитного поля с частотой в диапазоне от 3 до 30 МГц.
11. Устройство по любому из пп. 1-4, в котором обрабатывающая схема (144) имеет режим определения местоположения метки (2) на границе раздела (5), которое соответствует положению нормали к указанной границе раздела, при этом в режиме определения местоположения и при одном и том же расстоянии между антенной (13) и границей раздела обрабатывающая схема (144) выполнена с возможностью:
- выдавать команду на создание магнитного поля с одной и той же величиной поля, когда метка не обнаруживается;
- выдавать команду на создание магнитного поля с уменьшенной величиной поля при обнаружении метки.
12. Устройство по п. 9, в котором обрабатывающая схема (144) выполнена с возможностью указывать на обнаружение метки в указанном режиме определения местоположения посредством указанного коммуникационного интерфейса.
13. Устройство по п. 11, в котором обрабатывающая схема (144) выполнена с возможностью сохранения в памяти наименьшего значения магнитного поля, при котором обнаруживается метка в указанном режиме определения местоположения.
14. Устройство по п. 13, в котором обрабатывающая схема, когда она инициирует определение указанных пар, выдает команды на создание магнитного поля, соответствующего наименьшей величине магнитного поля, хранящейся в памяти, в указанном режиме определения местоположения.
15. Устройство по любому из пп. 1-4, в котором указанное устройство определения включает в себя устройство (147) для измерения расстояния между антенной (13) устройства (7) и границей раздела.
16. Способ определения местоположения RFID-метки (2) относительно границы раздела (5) между двумя средами, причем метка расположена с противоположенной стороны от оценочного устройства (7) относительно границы раздела, включающий этапы, на которых:
создают электромагнитное поле с разными последовательными значениями амплитуды с антенной (13) индукционного типа оценочного устройства (7);
определяют (147) расстояние между антенной (13) и границей раздела (5) во время указанного создания поля;
определяют, обнаруживается или не обнаруживается отклик от метки;
определяют нескольких пар, каждая из которых включает в себя:
расстояние, определенное между антенной (13) и границей раздела (5); и
минимальное значение электромагнитного поля, создаваемого на уровне антенны, при котором происходит обнаружение метки на данном расстоянии;
оценивают расстояние между меткой и границей раздела в зависимости от указанных определенных пар.
17. Способ определения местоположения RFID-метки (2) по п. 16, в котором указанное определение расстояния между антенной и границей раздела выполняют путем измерения расстояния между антенной и границей раздела.
| US 2011181289 A1, 28.07.2011 | |||
| US 2007290846 A1, 20.12.2007 | |||
| JP 2005181111 A, 07.07.2005 | |||
| US 2008150693 A1, 26.06.2008. |

