Предлагаемое изобретение относится к области радионавигации и может быть использовано в системах определения местоположения и слежения за траекторией перемещающихся в надземном пространстве объектов по сигналам навигационных бесспутниковых систем, использующих RFID-технологию.
Известна система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем [1], содержащая космический сегмент в виде навигационных космических аппаратов (НКА), ретранслятор, расположенный на подвижном объекте, и наземный сегмент в виде НИП. Ретранслятор содержит приемник сигналов НКА, преобразователь несущей частоты и передатчик ретранслируемых сигналов. НИП содержит блок приема и обработки сигналов ретранслятора, блок вычисления координат местоположения ретранслятора, а также блок коррекции и блок приема и обработки сигналов НКА. Блок коррекции содержит блок вычисления ионосферной задержки и блок вычисления погрешности эфемеридно-временного обеспечения НКА, блок метеоданных, блок данных об ионосфере, блок предвычисления положения ретранслятора.
Известна также система и способ определения координат местоположения [2], которое относится к спутниковому позиционированию, и может быть использовано для определения координат местоположения в глобальной навигационной спутниковой системе. Технический результат заключается в обеспечении плавного перехода от одного метода определения координат местоположения к другому без скачкообразного изменения значений координат, что обеспечивает более надежное управление транспортными средствами и подобными объектами. Для этого вычисляют с низкой точностью значения координат местоположения и, если определение координат с высокой точностью невозможно, применяют поправку к вычисленным с низкой точностью значениям для определения итоговых значений координат, при этом в качестве поправки используют разницу между значениями координат, вычисленными с низкой точностью, и значениями координат, вычисленными с высокой точностью, в момент времени, когда определение значений координат местоположения с высокой точностью было в последний раз возможно, при этом непрерывно оценивают возможность определения координат местоположения с высокой точностью, и если это стало возможным, вычисляют значения координат местоположения с высокой точностью и применяют вновь вычисленную поправку к вычисленным с высокой точностью значениям координат для получения нового итогового значения координат местоположения.
Однако все системы спутниковой навигации имеют существенные недостатки:
- высокая стоимость создания спутниковой группировки и ее обслуживания с необходимостью постоянной замены входящих в нее элементов;
- высокая стоимость создания и обслуживания наземных станций управления;
- сложность архитектуры и высокие требования к вычислительным мощностям применяемой аппаратуры;
- сравнительно большая погрешность позиционирования, в первую очередь, быстро движущегося транспорта из-за запаздывания обработки информации получаемых сигналов от спутника, которые впоследствии обрабатываются наземным центром и передаются на бортовой компьютер транспортного средства;
- поиск сигналов спутников и синхронизация занимают довольно много времени, особенно если пользователь находится в окружении железобетонных высотных зданий;
- зависимость от погодных условий, состояния атмосферы в части электромагнитных возмущений техногенного и природного характера, активности Солнца, а также прямой видимости отслеживаемого объекта.
Известен способ безопасности дорожного движения [3], в котором блок обнаружения транспортного средства, установленный на дорожных знаках и светофорах, оборудован приемопередатчиком частотно- и/или фазомодулированных радиосигналов узконаправленного по зоне действия излучения и перемещен со знаков и светофоров на фронтальную часть транспортного средства по направлению его движения, а дорожные знаки и светофоры снабжены электронными дубликатами, выполненными например, в виде колебательных контуров - радиочастотных идентификаторов, расположенных непосредственно на них, рядом с ними и/или на определенном расстоянии от них, и имеющими уникальные для данного знака и типа светофора сигналы отклика на сигнал опроса приемопередатчика, выход которого соединен с устройством для автоматического распознавания сигналов, соединенного, в свою очередь, параллельно с блоком отображения информации и блоком регулировки подачи топлива транспортного средства с ограничителем, заменяющий собой блок управления, памяти и протоколирования нарушений для записи текущей информации и блок выработки рекомендаций для водителя ТС по параметрам движения. При этом, при попадании модулированного сигнала опроса, излучаемого приемопередатчиком, на колебательный контур дорожного знака и совпадении частотно- и/или фазомодулированных параметров сигнала опроса с резонансными характеристиками колебательного контура происходит резкое увеличение амплитуды сигнала, что идентифицируется приемопередатчиком как метка, присущая конкретному дорожному знаку или типу светофора. Сигнал, соответствующий выработанной метке, с приемопередатчика передается на устройство для автоматического распознавания, противопоставляющий метку из имеющегося набора, содержащего информацию обо всех известных на настоящий момент дорожных знаках и типах светофоров, конкретному дорожному знаку или типу светофора, который и отображается в виде аудиосигнала, фото- и/или видеоинформации на дисплее блока отображения информации. Кроме того, сигнал, выработанный устройством для автоматического распознавания, параллельно подается на блок регулировки подачи топлива, который вырабатывает управляющий сигнал, подаваемый на ограничитель, снижающий топливоподачу в камеру сгорания в случае идентификации входящего сигнала как ограничивающего скорость транспортного средства в зонах повышенной опасности (дорожные знаки, ограничивающие скорость) либо вообще прекращающий топливоподачу (дорожные знаки, запрещающие движение).
К недостаткам данного способа следует отнести невозможность позиционирования транспортного средства по отношению к месту, где оно находится.
Наиболее близким по технической сущности к заявляемому объекту является устройство [4], содержащее как минимум две радиочастотные метки, установленные на известных местах участка железнодорожного пути, и расположенный на железнодорожном транспортном средстве радиочастотный считыватель. Радиочастотные метки выполнены по технологии устройств на поверхностных акустических волнах: ПАВ-меток, работающих на частоте 2,4 ГГц. Радиочастотный считыватель выполнен как минимум двухканальным и с двумя приемо-передающими антеннами, расположенными на днище железнодорожного транспортного средства в промежутках между его колесных пар и разнесенными по длине железнодорожного транспортного средства. Пары приемо-передающих антенн и соответствующие им ПАВ-метки, установленные на железнодорожном пути, расположены в параллельных плоскостях, которые в поперечном направлении железнодорожного транспортного средства наклонены к горизонту соответственно под углом 0-65°. При этом ПАВ-метка может быть установлена на уголке, который закреплен своей свободной полкой на железнодорожного пути, в том числе на его рельсно-шпальной решетке. Уголок может быть установлен своей свободной полкой непосредственно под рельс.
К недостаткам устройства следует отнести ограниченную область применения вследствие наличия жестко заданных направлений движения транспортных средств - пассажирских и грузовых поездов, локомотивов, электричек и пр., а также использования радиочастотных меток, выполненных по технологии поверхностных акустических волн.
Предлагаемое изобретение направлено на обеспечение возможности определения местоположения транспортного средства, оборудованного радаром-считывателем данных с радиочастотных меток, расположенных на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и объектах неживой природы, на которых могут быть установлены и зафиксированы эти метки. При этом координаты меток заранее определены, например, путем однократного присвоения их с помощью любой известной системы глобального позиционирования (GPS, ГЛОНАСС) либо назначением координат, связанных только с уникальным положением меток относительно перекрестков улиц и других разветвлений и ответвлений дорог, в том числе официально неуказанных на карте местности.
Технический результат достигается тем, что на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и подходящих для этого объектах неживой природы устанавливаются радиочастотные метки, координаты которых заранее определены, при этом транспортное средство оборудовано радаром-считывателем информации с меток, передающего ее на электронную карту местности, сформированную заранее на основе спутниковых снимков, с дополнительно отмеченными на ней координатами всех меток местности - города, деревни, поселка, направления, дороги, маршрута. На карте происходит сопоставление данных, определенной радаром-считывателем в настоящий момент метки, с данными, имеющимися на карте, и/или находящимися в базе данных. После чего изображение визуализируется для пользователя с отметкой расположения в определенной точке улицы, дороги, маршрута, направления. Прокладывание маршрута движения относительно уже установленных координат осуществляется соединением ближайших меток от пункта «А», в котором находится пользователь, до выбранного на карте пункта «Б», определяемого ближайшим к нему объектом с установленным на нем меткой, путем включения меток между ними вдоль дорог, направлений или маршрутов с выбором минимального расстояния между пунктами «А» и «Б». Точность достижения объекта будет определяться близостью к нему метки и плотностью таких меток на местности рядом с выбранным объектом.
Технический результат заключается в обеспечении навигационного обслуживания в зоне, содержащей радиочастотные метки, в условиях обеспечения высокочастотной и иной радиосвязи в направлении от движущегося или неподвижного транспортного средства, пешехода или другого пользователя к метке при произвольных траекториях движения пользователя.
Отличительными признаками предлагаемого способа является то, что радиочастотные метки устанавливаются на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и подходящих для этого объектах неживой природы, при этом их информационные данные, характеризующие уникальность расположения каждой метки, противопоставляются аналогичным данным, нанесенным на электронную карту местности и/или хранящимся ее в базе данных. Координаты меток назначаются относительно установленных границ города или другого населенного объекта, района, региона, области, административной единицы или государства путем построения координатной сетки, где самая южная точка границы имеет нулевое значения численного индекса (числа) при позиции, обозначенной одной или несколькими буквами алфавита, западная - при позиции, обозначенной другой буквой или буквами алфавита. Координаты остальных меток, следующих за меткой (метками) с нулевым индексом при любой из двух буквенных позиций, получаются добавлением, например, единицы к индексам позиций меток. Координаты меток учитывают запрещающие и предписывающие знаки дорожного движения, располагающиеся на перекрестках, ответвлениях и разветвлениях дороги, непосредственно там, где они установлены, а также на соседних перекрестках, ответвлениях и разветвлениях. Точность позиционирования подвижного или неподвижного объекта на карте определяется расстоянием от него до ближайшей к нему метки и плотностью таких меток на поверхности рядом с выбранным объектом. Прокладывание маршрута движения объекта осуществляется соединением ближайших меток (метки) от пункта «А», в котором находится пользователь, до ближайшей к пункту «Б» метки (меток) через все лежащие между ними метки с последующим выбором минимального расстояния.
Сущность: метки играют роль геодезических пунктов, учитывающих информацию о дорожных знаках, и расположенных на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и объектах неживой природы, относительно которых происходит позиционирование выбранного объекта - транспортного средства, пешехода или другого пользователя, имеющего радар-считыватель информации.
Предлагаемый способ позиционирования - в отличие от глобальных способов и систем позиционирования - работает на опережение, извещая, например, водителя о событии (перекресток, поворот, разветвление, тупик, встречное движение и пр.) за некоторое время до его наступления, поэтому у него всегда есть запас времени для принятия решения по выбору дальнейшего маршрута. Например, даже при скорости 40 м/с (144 км/ч) при максимальной дальности обнаружения радаром активной метки 100 м у водителя остается 2,5 секунды на принятие решения. Точность позиционирования предлагаемого способа существенно выше, чем у любой глобальной системы навигации, поскольку координаты метки, независимо от ее расположения, назначаются относительно перекрестка, ответвления и разветвления дороги, маршрута, направления и других, указанных выше, объектов. Для того чтобы избежать перекрытия каким-либо объектом, поглощающим или отражающим радиоволны, метки, соответствующие одной координате местности, могут быть продублированы на нескольких рядом расположенных объектах. Каждая метка имеет признак наследования информации от близлежащих к ней меток, например, о дорожных знаках. При этом на точность позиционирования пользователя не будут влиять иные посторонние события, такие как электромагнитные возмущения в атмосфере, погодные условия и пр.
Изобретение поясняется прилагаемыми рисунками, где на фиг. 1 представлена общая схема функционирования; на фиг. 2 - пример поиска маршрута, на фиг. 3 - пример идентификатора метки с разбиением на субидентификаторы.
На фиг. 1 введены следующие обозначения:
1 - объект;
2 - радиочастотная метка;
3 - радиоволны (сигнал опроса метки радаром-считывателем);
4 - радар-считыватель;
5 - транспортное средство.
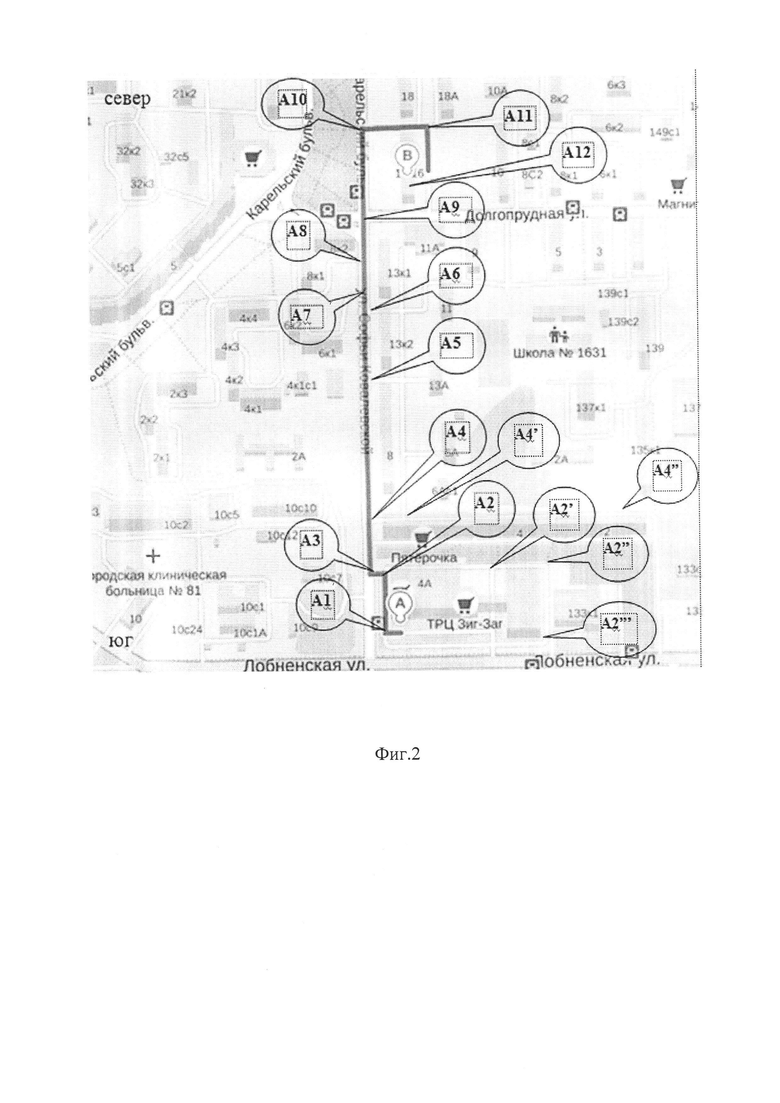
Пояснения к фиг. 2: А1-А12 - метки 2, выбранные бортовым компьютером транспортного средства 5 при минимизации маршрута от пункта «А» до «В».
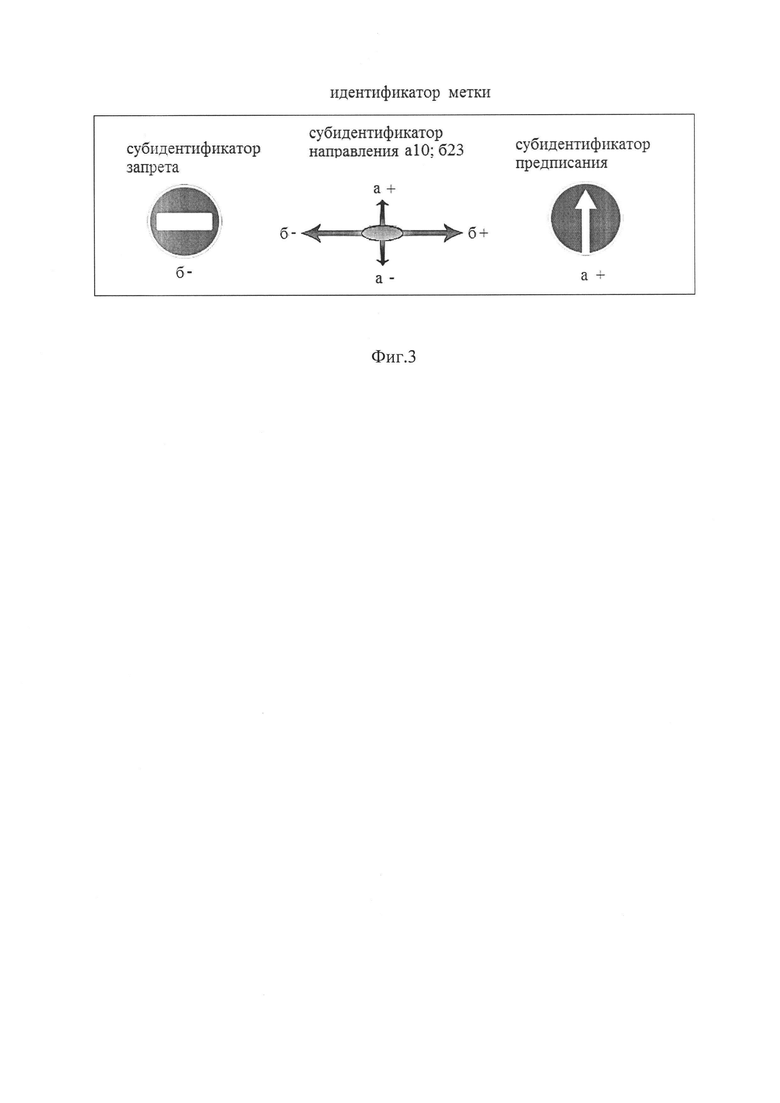
Пояснения к фиг. 3:
- метка, вероятно, находится на перекрестке, поскольку возможно движение во всех четырех направлениях;
- движение в направлении на запад (налево) запрещено;
- движение в направлении на восток (направо) - только прямо.
Способ может быть реализован с помощью устройства (фиг. 1), состоящего из объекта 1 (например, опоры освещения), на котором - в зоне недосягаемости для вандалов или невидимости - располагается радиочастотная метка 2, опрашиваемая сигналом 3 радара-считывателя 4, установленного, например, под капотом, транспортного средства 5. В бортовой компьютер (на рисунке не показан) транспортного средства 5 вводится информация о его типе (легковой, грузовой, с прицепом и пр.), что необходимо для построения маршрута с учетом расположенных на нем дорожных знаков, в первую очередь запрещающих и предписывающих. Информация об обоих типах этих знаков записывается в идентификаторы меток 2, располагающихся на перекрестах и поворотах, ведущих к этим знакам, и дублируется на всех предшествующих этим знакам перекрестках и поворотах.
Уникальный идентификатор каждой метки 2 будет включать следующие субидентификаторы:
1. Субидентификаторы запрета, определяющие, что движение в данном направлении запрещено, например, установлены запрещающие знаки «Движение запрещено», «Въезд запрещен» и другие из этой категории.
2. Субидентификаторы предписания, учитывающие предписывающие знаки, для выбора разрешенного направление движения.
3. Субидентификаторы направления - юг, восток, север, запад.
Каждый субидентификатор направления имеет позиции «а» и «б» с соответствующими численными индексами при буквенном обозначении, которые устанавливаются следующим образом. Крайняя южная метка 2 или несколько меток 2 населенного пункта имеют субидентификаторы направления, равные нулю - «а0». По мере продвижения к северу к субидентификатору направления прибавляется, например, единица - «a1». Аналогично, все метки 2, находящиеся на западной границе имеют субидентификатор направления «б0», а по мере приближения к востоку индекс «б» увеличивается, например, на единицу - «б1». При этом при разрастании населенного пункта и выходу за установленные ранее границы от исходных субидентификаторов «а» и «б» вычитается, например, единица - «а-1», «б-1». Метки 2, находящиеся на одной линии (улице) могут иметь одинаковые числа в субидентификаторе «а», отличаясь числами в субидентификаторе «б», и, наоборот. Таким образом, каждый субидентификатор направления будет обозначен двумя позициями «аn» и «бm» (n и m - натуральные числа).
Субидентификаторы запрета и субидентификаторы предписания имеют более высокий приоритет по сравнению с субидентификатором направления и проверяются в указанном выше порядке. Если в индентификаторе метки 2 находится, например, субидентификатор запрета поворота в нужном направлении, то метка 2, ведущая в направлении поворота, исключается из рассмотрения и не используется для построения маршрута.
Если метка 2 однажды пройдена транспортным средством при прохождении данного маршрута, то она исключается из дальнейшего рассмотрения для исключения зацикливания.
Поскольку карта построена в одном масштабе на этапе выбора маршрута, то минимальный путь (расстояние) выбирается на основании суммирования отрезков, из которых он состоит, например, в миллиметрах.
Работа устройства осуществляется следующим образом (фиг. 2). Пусть карта ориентирована по направлению «юг-север» и транспортное средство 5 выдвигается из пункта «А» в пункт «В». Радар-считыватель 4 производит сканирование радиоволнами 3 окружающего пространства с целью поиска ближайших к нему меток 2, например, на основании вычисления времени задержки обратного сигнала, приходящего на радар-считыватель 4 и/или эффекта Доплера. После получения сигнала отклика от метки 2, расположенной на ближайшем объекте 1, радар-считыватель 4 передает идентификаторы бортовому компьютеру транспортного средства 5, который осуществляет поиск аналогичных идентификаторов на загруженной в него оффлайн-карте или базе данных, связанных с этой картой, полученной, например, с помощью спутниковой съемки. Таким образом, исходное позиционирование транспортного средства 5 произведено.
С установленной точки позиционирования строится маршрут с выбором минимального расстояния между начальной и конечной точками следующим образом. Определяется идентификатор пункта «В», причем подлежит оценке только субидентификатор направления - в рассматриваемом случае этот субидентификатор больше, чем у исходного на несколько единиц, как в позиции «а», так и «б» (количество единиц расхождения зависит от количества меток 2, установленных между пунктами «А» и «В» в северном и восточном направлении).
Далее бортовой компьютер определяет две метки 2 на карте, ближайших к перекрестку или повороту дороги, по отношению к исходной точке позиционирования. Предположим, что ближайшая метка 2, обозначенная на карте «А1», расположенная на перекрестке, имеет субидентификатор направления «а10» и «б23», кроме того в нем указаны изменения субидентификаторов соседних меток 2 - справа (север) «а+», слева (юг) - «а-», вперед (запад) - «б-», назад (восток) - «б+», при этом плюс обозначает увеличение индекса соседней метки 2, минус - уменьшение (фиг. 3).
Далее бортовой компьютер рассматривает соседние к «А1» метки 2, позволяющие улучшить индексы при позициях «а» и «б». «А2» - метка, улучшает индекс при позиции «б», поэтому она принимается за следующую потенциально возможную метку 2 на строящемся маршруте транспортного средства 5. При этом «А1» исключается из дальнейшего рассмотрения для исключения зацикливания маршрута.
Бортовой компьютер рассматривает соседние теперь к «А2» метки 2. Поскольку движение прямо от «А2» невозможно (субидентификатор запрета запрещает движение прямо, так как это Т-образный перекресток), то производится поиск меток 2 слева от «А2», хотя это направление и ухудшает позицию «а» (допускается, как правило, временное ухудшение одного из двух индексов). Просматривание маршрута направо - в направлении «A2'» - «A2''» - «A2'''» ухудшает обе позиции «а» и «б», кроме того, дальнейшее движение приведет к зацикливанию маршрута, поскольку в рассмотрение должна быть принята одна из уже пройденных меток 2, что запрещено.
Движение в направлении «А4»…«А5» улучшают индекс при «а», поэтому они будут выбраны как приоритетные направления. На «А4» возможно движение направо - в направлении «A4'» - «A4''» и далее вверх к «А12», однако при наличии альтернативных вариантов этот маршрут будет одним из самых длинных и в будет исключен из рассмотрения на этапе оценки расстояния между пунктами «А» и «В».
Проводя далее аналогичные действия, бортовой компьютер проложит маршрут до «А11», где будет осуществлена остановка, поскольку «А12» размещена на здании (или несколько меток 2 с одинаковыми индексами позиций «а» и «б» на углах здания). В данном случае позиционирование возможно с точностью до найденного здания.
Как показано выше, могут быть выбраны другие альтернативные маршруты, но расчет расстояния, произведенный бортовым компьютером, покажет единственно возможное минимальное, показанное на рисунке как оптимальный маршрут.
Второй вариант маршрута передвижения транспортного средства 5 может быть построен из точки «А» «вправо», однако в последствие подсчет суммы длин отрезков полученной ломаной линии даст больший результат, и маршрут будет отвергнут.
Маршрутизация при движении транспортного средства производится аналогично.
Таким образом, предлагаемое устройство позволяет заблаговременно извещать участника дорожного движения о наступающем событии - достижении определенной точки на маршруте движения, работая на опережение; точность позиционирования предлагаемого способа существенно выше за счет относительной привязки к объектам и дублирования меток; на идентификацию местоположения объекта не влияют какие-либо другие объекты и посторонние события. При этом радары не существенно загрязняют электромагнитным излучением окружающую среду, поскольку могут работать в импульсном режиме с паузой от одной до нескольких секунд.
Используемые источники
1. Патент №2490665, МПК G01S 19/42. Система определения местоположения подвижного объекта по сигналам глобальных навигационных спутниковых систем / Баринов С.П., Непогодий Д.С.
2. Патент №2487370, МПК G01S 9/42. Система и способ определения координат местоположения / Грей Стюарт, Душа Дэмиен, Роберте Питер Джеймс, Келлар Уильям Джеймс.
3. Патент №2574293, МПК G08G 1/09. Способ повышения безопасности дорожного движения / Симдянкин А.А., Симдянкин В.А., Успенский И.А., Паршин Ю.Н., Колесников С.В., Бышов Н.В., Борычев С.Н., Юхин И.А., Жуков К.А.
4. Патент №125535, МПК B61L 25. Устройство радиочастотной идентификации и позиционирования железнодорожного транспорта / Рабинович М.Д., Шубарев В.А., Никифоров Б.Д., Ефимов В.В., Гаврилов Л.Б., Кислицын В.О., Саркисян П.С., Калинин В.А.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНФОРМИРОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕКРЕСТКАХ О ПОТОКАХ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2703409C1 |
| СПОСОБ НАВИГАЦИИ ЛЮДЕЙ С ОСЛАБЛЕННЫМ ЗРЕНИЕМ В ЗДАНИЯХ И СООРУЖЕНИЯХ | 2017 |
|
RU2651162C1 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ТРАНСПОРТНЫХ ПОТОКАХ НА АВТОДОРОГАХ С ИСПОЛЬЗОВАНИЕМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ | 2010 |
|
RU2442963C1 |
| Способ радиолокационного распознавания светофора (варианты) | 2022 |
|
RU2797600C1 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427924C1 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МАРШРУТА ДВИЖЕНИЯ | 2014 |
|
RU2661963C1 |
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2654502C2 |
| Способ определения местоположения локомотива на технологической схеме железнодорожных путей | 2021 |
|
RU2789432C2 |
| Система определения местоположения железнодорожного подвижного состава | 2018 |
|
RU2698498C1 |
| Способ контроля транспортных средств и устройство для его осуществления | 2020 |
|
RU2745459C1 |

Изобретение относится к области радионавигации и может быть использовано в системах определения местоположения и слежения за траекторией перемещающихся в надземном пространстве объектов по сигналам навигационных бесспутниковых систем, использующих RFID-технологию. Достигаемый технический результат – обеспечение навигационного обслуживания в зоне, содержащей радиочастотные метки при произвольных траекториях движения пользователя. Указанный результат достигается за счет того, что радиочастотные метки устанавливаются на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и подходящих для этого объектах неживой природы, при этом их информационные данные, характеризующие уникальность расположения каждой метки, противопоставляются аналогичным данным, нанесенным на электронную карту местности и/или хранящимся ее в базе данных. Координаты меток назначаются относительно установленных границ города или другого населенного объекта, района, региона, области, административной единицы или государства путем построения координатной сетки, где самая южная точка границы имеет нулевое значения численного индекса (числа) при позиции, обозначенной одной буквой алфавита, западная - при позиции, обозначенной другой буквой алфавита. Координаты остальных меток, следующих за меткой (метками) с нулевым индексом при любой из двух буквенных позиций, получаются добавлением, например, единицы к индексам позиций меток. Координаты меток учитывают запрещающие и предписывающие знаки дорожного движения, располагающиеся на перекрестках, ответвлениях и разветвлениях дороги, непосредственно там, где они установлены, а также на соседних перекрестках, ответвлениях и разветвлениях. Прокладывание маршрута движения объекта осуществляется соединением ближайших меток (метки) от исходного пункта, в котором находится пользователь, до ближайшей к искомому пункту метки (меток) через все лежащие между ними метки с последующим выбором минимального расстояния. 4 з.п. ф-лы, 3 ил.
1. Способ позиционирования неподвижных и произвольно движущихся объектов, оборудованных системой приема-передачи радиосигналов, состоящий в обнаружении на карте местности привязанных к ней радиоидентификаторов, отличающийся тем, что координаты занесены в качестве данных в радиочастотные идентификаторы, например RFID, которые устанавливаются на дорожных знаках, светофорах, столбах, деревьях, зданиях и сооружениях, а также других искусственных объектах и объектах неживой природы, на которых они могут быть установлены и закреплены, при этом эти данные, характеризующие уникальность расположения каждого идентификатора, противопоставляются аналогичным данным, нанесенным на электронную карту или загруженную оффлайн карту местности, и назначаются относительно установленных границ города или другого населенного объекта, района, региона, области, административной единицы или государства путем построения координатной сетки, где самая южная точка границы имеет нулевое значения численного индекса при позиции, обозначенной одной или несколькими буквами алфавита, западная - при позиции, обозначенной другой буквой/буквами алфавита, при этом координаты остальных опорных точек, следующих за точкой (точками) с нулевым индексом при любой из двух буквенных позиций, получаются добавлением, например, единицы к численным индексам соответствующих позиций.
2. Способ по п. 1, отличающийся тем, что радиочастотные идентификаторы учитывают знаки дорожного движения, располагающиеся на перекрестках, ответвлениях и разветвлениях дороги, непосредственно там, где они установлены, а также на всех соседних к ним перекрестках, ответвлениях и разветвлениях.
3. Способ по п. 1, отличающийся тем, что прокладывание маршрута движения объекта осуществляется поиском ближайшего радиочастотного идентификатора к пункту, в котором находится пользователь, до ближайшего идентификатора к искомому пункту с последующим соединением этих пунктов линиями, проходящими через все лежащие между ними идентификаторы, при этом один раз пройденные идентификаторы исключаются из рассмотрения.
4. Способ по п. 1, отличающийся тем, что поиск промежуточных идентификаторов маршрута осуществляется путем нахождения идентификаторов со значениями индексов буквенных позиций, последовательно приближающихся от исходных значений к искомым (или наоборот), с учетом дорожных знаков и последующим выбором из найденных альтернатив минимального значения расстояния.
5. Способ по п. 1, отличающийся тем, что точность позиционирования подвижного или неподвижного объекта на карте определяется расстоянием от него до ближайшего к нему радиочастотного идентификатора и плотностью расположения идентификаторов к объекту.
| Сушильная камера, например для шлихтовальной машины | 1959 |
|
SU125535A1 |
| Десятичный реверсивный счетчик на плоскостных полупроводниковых триодах | 1959 |
|
SU123568A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| US 20110012781 A1, 20.01.2011 | |||
| FR 2907950 A1, 02.05.2008 | |||
| JP 2013072858 A, 22.04.2013 | |||
| US 9352940 B1, 31.05.2016. | |||

