Изобретение относится к вооружению, в частности к мобильным пусковым системам для запуска управляемых ракет ПВО, и может быть использовано при создании пусковых установок (ПУ) вертикального пуска при использовании транспортно-пусковых контейнеров (ТПК).
Известна самоходная пусковая установка для транспортирования и пуска ракет из ТПК при помощи пороховых аккумуляторов давления (RU 93519 Ul, F41F 3/04, 2010). Самоходная ПУ содержит колесное шасси с опорами, устанавливаемыми с возможностью контактирования с грунтом. В передней части шасси установлены кабина и моторный отсек. На кабине и на шасси размещено навесное оборудование. Над моторным отсеком размещено антенно-мачтовое устройство. В задней части шасси с возможностью поворота в вертикальной плоскости смонтирована качающаяся часть (КЧ) с ТПК и размещен механизм подъема (поворота) качающейся части. В варианте исполнения на КЧ размещается четыре ТПК. При развертывании ПУ сначала с помощью опор с гидроцилиндрами вывешивается и устанавливается горизонтально шасси. Затем КЧ с помощью механизма подъема устанавливают вертикально с опорой днищем ТПК на грунт.
Однако известная ПУ не решает задачу обеспечения достаточно точного горизонтирования для обеспечения устойчивости ПУ в рабочем положении.
Известна самоходная пусковая установка по патенту RU 80181 S (12-13; 22-02, 2011). Известная ПУ содержит четырехосное шасси, на котором с возможностью поворота в вертикальной плоскости установлена КЧ с четырьмя ТПК для ракет, размещенными таким образом, что в поперечном сечении образуют равнобокую трапецию, и выполненными цилиндрической формы с ребрами жесткости, механизм подъема КЧ, содержащий гидроцилиндр, передние и задние аутригеры, электронное оборудование, размещенное по бортам рамы шасси.
Известна самоходная ПУ, приведенная в описании изобретения по патенту RU 2350885 C1 (F41F 3/00, 2009). ПУ выполнена на базе автомобильного шасси и включает: платформу, шарнирно закрепленную на ней стрелу (качающуюся часть) и гидропривод, предназначенный для подъема-опускания стрелы. На передней части стрелы закреплен ложемент для установки ТПК, два других (средний и задний) ложемента скреплены между собой продольными штангами и установлены на стреле с возможностью перемещения вдоль последней. На торце переднего ложемента закреплен упор, предназначенный для ограничения перемещения ТПК вперед по стреле. Перемещение среднего и заднего ложементов по стреле осуществляется гидроприводом, шток которого механически связан с задним ложементом. Средний и задний ложементы снабжены крышками для раскрепления ТПК на стреле в поперечных направлениях. Задний ложемент также оборудован тремя тягами, предназначенными для связи с кронштейнами стартовой опоры ТПК. Стартовая опора входит в состав комплектации ТПК и выполнена в виде полого корпуса цилиндроконической формы с расширяющимся к низу основанием и силовым днищем оживальной формы. Стартовая опора разъемно крепится к заднему торцевому шпангоуту корпуса ТПК.
Известна мобильная ракетная установка по патенту RU 2493529 С2 (F41A 23/34, F41A 23/42, F41F 3/04, F41F 3/052, 2013). Известное устройство содержит транспортное средство - автомобиль с шасси, приспособленный для перевозки ПУ, установочную раму, представляющую собой раскосно-ферменную конструкцию, установленную на шасси, несколько механизмов скольжения, которые смонтированы на задней секции установочной рамы и входят в состав балочной конструкции (качающейся части), которая содержит несколько направляющих скольжения с салазками на одной своей стороне и шарнирно прикреплена к установочной раме другой своей стороной. При этом на указанной балочной конструкции установлен ряд седловидных ложементов, выполненных с возможностью линейного перемещения на направляющих с салазками. Устройство содержит несколько внутренних контейнеров (ТПК) с заключенными в них ракетами, установленных на балочной конструкции, несколько внешних контейнеров, которые заключают в себе указанные внутренние контейнеры и которые связаны с седловидными элементами для осуществления линейного перемещения, несколько стартовых опор, примыкающих к задним торцам внешних контейнеров и выполненных с возможностью линейного перемещения для передачи сил реактивной струи указанных ракет на грунт, и по меньшей мере один удерживающий механизм, установленный с передней стороны каждого внешнего контейнера для предотвращения линейного перемещения контейнера в период его транспортировки в горизонтальном положении. Устройство также содержит систему управления и гидравлический привод, включающий гидроцилиндр привода подъема балочной конструкции (качающейся части) и боковые стабилизирующие опоры (гидродомкраты), выполненные с возможностью контактирования с грунтом. Кроме того, устройство оснащено агрегатом теплового кондиционирования для регулирования температуры внутри внешнего контейнера.
Известна самоходная пусковая установка для транспортирования и пуска ракет из ТПК при помощи пороховых аккумуляторов давления по патенту RU 2239764 C1 (F41F 3/04, 2004). Известное устройство содержит самоходное колесное шасси (транспортное средство), на котором неподвижно закреплена рама кузова (платформа), стрелу (качающуюся часть), которая шарнирно установлена на раме кузова (платформе), механизм подъема стрелы (привод подъема качающейся части), раму подвижную, которая размещена на стреле с возможностью продольного перемещения по стреле до жесткого упора, ТПК, закрепленные в ложементах на раме подвижной. На раме кузова и стреле установлены опоры, шарнирно связанные рычагами и тягами механизма привода опор. Опора выполнена в виде двухштокового гидроцилиндра двустороннего действия с верхним штоком и нижним штоком с установленной шарнирно опорной плитой. Известное устройство позволяет снизить время развертывания и свертывания пусковой установки. Это достигается тем, что механизм привода опор переводит опоры из походного положения в рабочее и наоборот одновременно с подъемом или опусканием стрелы за счет взаимодействия рычагов, установленных шарнирно с одной стороны на раме кузова, а с другой - на двухштоковых гидроцилиндрах двустороннего действия, и тяг, установленных шарнирно с одной стороны на стреле, а с другой - на рычагах.
Однако последние четыре мобильные ПУ вертикального пуска не предполагают в период дежурства (т.е. в рабочем положении ПУ) обеспечения строго вертикального положения КЧ с ТПК в условиях воздействия изменяющихся внешних факторов окружающей среды.
Наиболее близкой по совокупности существенных признаков с заявляемым изобретением является самоходная ПУ по патенту RU 2386918 С1 (F41F 3/04, 2010), обеспечивающая эксплуатацию ТПК ракет с вертикальным минометным стартом. Известная самоходная ПУ содержит шасси, раму кузова и пусковое устройство, включающее стрелу (КЧ) с гидравлическим приводом ее подъема. На стреле установлены с возможностью продольного перемещения несколько кареток, каждая из которых оборудована ложементами для установки ТПК с ракетой, снабженного узлами механического сопряжения с пусковым устройством, которое включает неподвижно закрепленные на раме кузова передние ложементы для установки ТПК и основание, на котором с возможностью контактирования с грунтом установлены гидродомкраты и шарнирно установлены направляющая стрела, привод ее подъема и каретки. Последние выполнены в виде среднего и заднего ложементов, соединенных продольными штангами, которые связаны между собой поперечным силовым поясом. Ложементы смонтированы на направляющей стреле посредством скалок и узлов крепления с вмонтированными внутрь подшипниками. Каждая скалка каретки связана со штоком привода, предназначенного для ее перемещения вдоль стрелы, и оборудована кронштейном, закрепленным на задней ее части и снабженным направляющими элементами для взаимодействия с узлами механического сопряжения ТПК, выполненными в виде одного или двух силовых штырей, закрепленных на хвостовой части ТПК, перпендикулярно его продольной оси.
Однако известная ПУ не предполагает решения задачи обеспечения достаточно точного горизонтирования и - стабильного положения шасси, а также не предполагает возможности в период дежурства (т.е. в рабочем положении) достаточно длительное время обеспечивать стабильное положение качающейся части в условиях изменения температуры и ветровых нагрузок.
Задачей настоящего изобретения является создание мобильной ПУ вертикального пуска, способной в период дежурства ПУ (т.е. в рабочем положении) длительное время обеспечивать стабильное положение качающейся части с ТПК в вертикальном положении (по существу - обеспечивать требуемую вертикальность продольных осей ТПК с ракетами).
Указанная задача решается тем, что предложена мобильная пусковая установка (МПУ), содержащая шасси, на котором с возможностью поворота в вертикальной плоскости установлена КЧ, выполненная с возможностью установки ТПК, систему управления, гидравлический привод, включающий гидродомкраты, установленные на шасси с возможностью контактирования с грунтом, гидроцилиндр подъема КЧ, который шарнирно соединен соответственно с шасси и КЧ, устройство вертикализации КЧ, установленные на шасси средства для фиксации в транспортировочном положении соответственно КЧ и ТПК относительно шасси, установленные на шасси датчики продольного и поперечного горизонтирования, установленный на КЧ датчик вертикального положения КЧ. Упомянутые датчики через систему управления электрически связаны с гидравлическим приводом. Такое исполнение позволяет обеспечить стабильное положение КЧ с ТПК в рабочем положении (по существу - обеспечивать требуемую вертикальность продольных осей ТПК с ракетами) в период дежурства пусковой установки, что, в конечном счете, позволяет обеспечить повышение надежности ПУ и пусковой системы в целом.
Вместе с этим устройство вертикализации КЧ включает регулируемый по длине подкос, один из концов которого шарнирно соединен с шасси, а другой - с КЧ. Подкос состоит из двух шарнирно соединенных частей, которые выполнены с возможностью расположения на одной прямой в рабочем положении МПУ, и оснащен устройством сламывания и устройством для регулирования длины. В плане (т.е. на виде сверху) подкос расположен в вертикальной плоскости, в которой расположена продольная ось гидроцилиндра подъема КЧ.
В варианте выполнения устройство сламывания включает исполнительный гидроцилиндр, корпус которого шарнирно соединен с подкосом, а шток - со смонтированным на подкосе рычажным механизмом, выполненным с возможностью взаимодействия с шасси.
Кроме того, устройство для регулирования длины выполнено в виде телескопического соединения двух трубных элементов, соединенных между собой посредством не самотормозящейся винтовой передачи с фиксирующей фрикционной муфтой с гидроцилиндром.
Возможен вариант выполнения, при котором гидродомкраты выполнены каждый с гидровинтовым приводом, включающим гидромотор, кинематически связанный с винтовой парой, выполненной с возможностью обеспечения фиксации гидродомкрата в рабочем положении МПУ.
Вместе с этим МПУ содержит средства для фиксации в транспортировочном положении соответственно КЧ и ТПК относительно шасси, причем упомянутые средства смонтированы таким образом, что подъем КЧ возможен после освобождения от фиксации относительно шасси сначала ТПК, а затем - КЧ. Такое исполнение обеспечивает надежную фиксацию ТПК в транспортировочном положении МПУ и исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что повышает надежность ПУ.
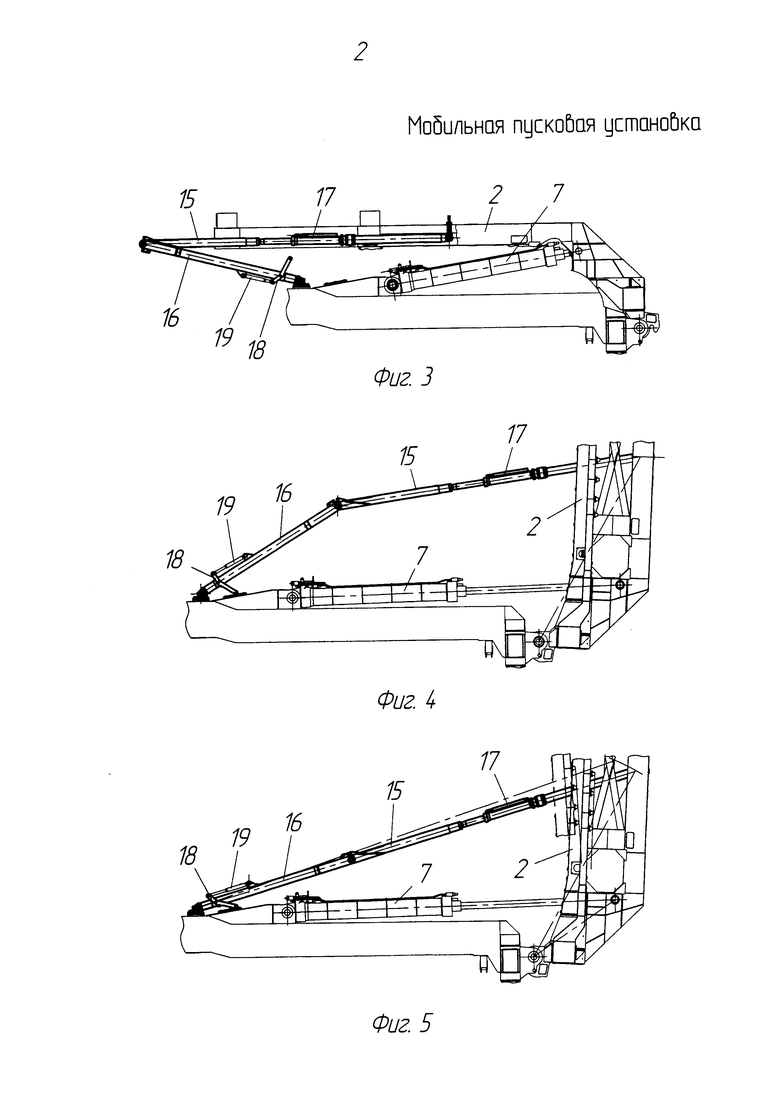
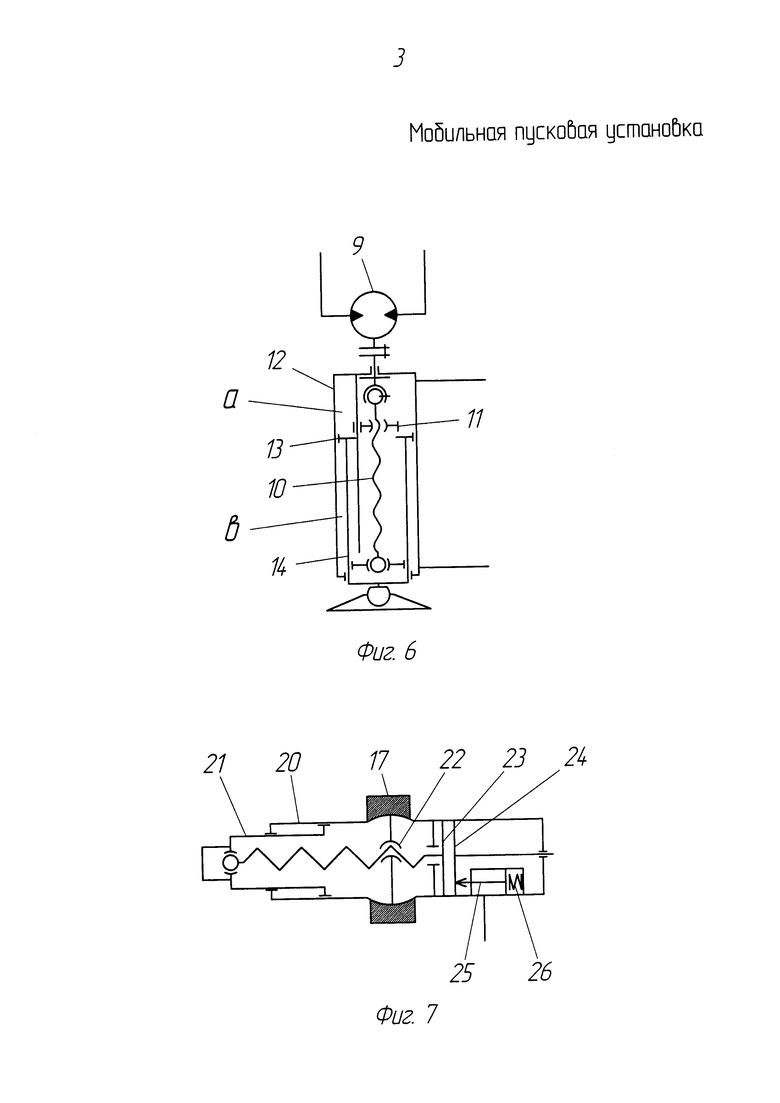
На фиг. 1 схематично показана мобильная пусковая установка в транспортировочном (походном) положении, общий вид; на фиг. 2 - то же в рабочем положении, МПУ вывешена на гидродомкратах, КЧ с ТПК поднята в вертикальное положение; на фиг. 3 - качающаяся часть и гидромеханическое устройство вертикализации КЧ в транспортировочном (походном) положении МПУ, общий вид; на фиг. 4 - то же в промежуточном положении; на фиг. 5 - то же в рабочем положении МПУ; на фиг. 6 - схематично показана часть гидравлического привода, включающая гидродомкрат с гидровинтовым приводом; на фиг. 7 - схематично показано устройство для регулирования длины подкоса гидромеханического устройства вертикализации КЧ.
Мобильная пусковая установка содержит шасси 1, на котором с возможностью поворота в вертикальной плоскости установлена качающаяся часть 2, выполненная с возможностью установки, например, двух транспортно-пусковых контейнеров 3, систему управления, гидравлический привод 4, включающий гидродомкраты 5, 6, установленные на шасси 1 с возможностью контактирования с грунтом, гидроцилиндр 7 подъема КЧ, который шарнирно соединен соответственно с шасси 1 и КЧ 2, устройство 8 вертикализации КЧ, установленные на шасси 1 средства для фиксации в транспортировочном (походном) положении соответственно КЧ и ТПК относительно шасси 1.
В варианте осуществления изобретения средства для фиксации в транспортировочном (походном) положении соответственно КЧ и ТПК относительно шасси выполнены, например, в виде гидромеханических устройств (на чертеже не показано). Гидромеханическое устройство фиксации ТПК гидравлически связано с гидромеханическим устройством фиксации КЧ. При этом гидромеханические устройства фиксации транспортировочного положения ТПК и КЧ установлены в магистраль подачи жидкости от насосного агрегата гидравлического привода 4 в поршневую полость гидроцилиндра 7 подъема КЧ. Подъем КЧ может производиться только после освобождения ТПК от фиксации относительно шасси 1 (т.е. после отстопоривания ТПК). Это исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что повышает надежность ПУ.
Гидравлический привод 4 содержит односторонние гидрозамки (на чертеже не показано) соответственно штоковой и поршневой полостей гидроцилиндра 7 подъема КЧ. Гидроцилиндр 7 подъема также имеет температурные клапаны (на чертеже не показано), гидравлически связанные соответственно со штоковой и поршневой полостями последнего. Гидродомкраты 5, 6 выполнены каждый с гидровинтовым приводом, включающим гидромотор 9, кинематически связанный с винтовой парой, включающей винт 10 с фиксирующей гайкой 11. Винтовая пара выполнена с возможностью обеспечения фиксации гидродомкрата в рабочем положении МПУ.
Каждый гидродомкрат имеет корпус 12, поршень 13, шток 14, поршневую «а»и штоковую «b» гидравлические полости. Поршневая полость «а» гидродомкрата гидравлически связана с соответствующим температурным компенсатором (на чертеже не показано).
Устройство 8 вертикализации КЧ предназначено для удержания качающейся части МПУ в вертикальном положении. В варианте осуществления изобретения устройство 8 вертикализации КЧ выполнено, например, гидромеханическим. Устройство вертикализации включает регулируемый по длине подкос, состоящий из двух шарнирно соединенных частей 15, 16, которые выполнены с возможностью расположения на одной прямой в рабочем положении МПУ. Подкос оснащен устройством сламывания и устройством 17 для регулирования длины. Один из концов подкоса шарнирно соединен с шасси 1 МПУ, а другой - с КЧ 2. В плане (т.е. на виде сверху) подкос расположен в вертикальной плоскости, в которой расположена продольная ось гидроцилиндра 7 подъема КЧ.
Устройство сламывания включает смонтированный на подкосе (по существу - на одном из концов части 16 подкоса) рычажный механизм 18, выполненный с возможностью взаимодействия с шасси 1, и исполнительный односторонний гидроцилиндр 19, корпус которого шарнирно соединен с подкосом (по существу - с частью 16 подкоса), а шток - с рычажным механизмом 18. Гидроцилиндр 19 обеспечивает возможность принудительного перемещения частей подкоса.
Устройство 17 для регулирования длины подкоса представляет собой телескопическое соединение двух трубных элементов 20, 21, соединенных между собой посредством не самотормозящейся винтовой передачи 22. Последняя выполнена с возможностью фиксации с помощью фрикционной муфты, включающей фрикционные диски 23, 24 и гидроцилиндр 25 с пружиной 26.
Односторонний гидроцилиндр 19 устройства сламывания и гидроцилиндр 25 фиксирующей фрикционной муфты устройства 17 гидравлически связаны с насосным агрегатом (на чертеже не показано) гидравлического привода.
Пусковая установка включает установленные на шасси 1 датчики продольного и поперечного горизонтирования и установленный на КЧ датчик вертикального положения КЧ (на чертеже не показано). Упомянутые датчики через систему управления электрически связаны с гидравлическим приводом.
Наличие устройства 8 вертикализации КЧ позволяет обеспечить требуемую вертикальность КЧ (по существу - требуемую вертикальность продольных осей ТПК с ракетами) и стабилизировать КЧ в рабочем положении, исключив практически полностью влияние ветровых нагрузок. Вместе с этим наличие регулируемого по длине подкоса (по существу - жесткой тяги) позволяет в рабочем положении КЧ держать упомянутые односторонние гидрозамки штоковой и поршневой полостей гидроцилиндра 7 подъема КЧ открытыми, что, в свою очередь, снимает влияние на гидравлический привод температурных колебаний, что также способствует стабилизации положения поднятой в рабочее положение КЧ с ТПК.
В варианте осуществления изобретения мобильная пусковая установка работает следующим образом.
Заряжание и разряжание МПУ (по существу - загрузка-выгрузка ТПК) осуществляются в автоматическом режиме, либо от ручного привода (при отсутствии электропитания и при необходимости). Заряжание МПУ производится, например, при помощи транспортно-заряжающей машины (ТЗМ), которая занимает позицию в непосредственной близости от МПУ (на чертеже не показано). При этом МПУ и ТЗМ определенным образом позиционируются относительно друг друга. После позиционирования пусковую установку подготавливают к приему ТПК, а ТЗМ подготавливают к перегрузке ТПК. После окончания погрузочно-разгрузочных работ МПУ переводят в походное положение.
На месте развертывания МПУ при переводе ее из транспортировочного (походного) положения в рабочее положение вначале производят вывешивание МПУ с помощью гидродомкратов 5, 6.
Чтобы исключить влияние рессор шасси 1 на последующее горизонтирование МПУ, целесообразно перед горизонтированием несколько приподнять раму шасси относительно ее транспортировочного положения. Это обеспечивается путем подачи в поршневые полости «а» гидродомкратов 5, 6 равных определенных объемов рабочей жидкости при вывешивании мобильной установки. Таким образом исключают влияние рессор на горизонтирование, что, в конечном счете, повышает стабильность и точность горизонтирования МПУ.
После вывешивания МПУ и подъема рамы шасси на определенную высоту относительно ее транспортировочного положения производят горизонтирование МПУ в продольной и поперечной плоскостях. По сигналу датчика продольного горизонтирования (на чертеже не показан) и команде системы управления, в зависимости от наклона шасси в сторону передних 5 (по чертежу) или задних 6 гидродомкратов, подают жидкость в поршневые полости «а» гидродомкратов 5 или 6.
После горизонтирования в продольной плоскости по сигналу датчика поперечного горизонтирования (на чертеже не показан) и команде системы управления, в зависимости от направления крена шасси МПУ, производят поперечное горизонтирование МПУ.
После горизонтирования МПУ в продольной и поперечной плоскостях, для исключения влияния ветровых нагрузок на МПУ и, как следствие, - возможности нарушения ее горизонтального положения, фиксируют положение гидродомкратов 5, 6. Жидкость под давлением поступает в гидромоторы 9. Гидромоторы приводят во вращение соответствующие винты 10, расположенные в корпусах 12 гидродомкратов 5, 6. Посредством вращающихся винтов 10 фиксирующие гайки 11 опускаются на поршни 13 гидродомкратов, фиксируя штоки 14 гидродомкратов в неподвижном положении.
После вывешивания, горизонтирования и фиксации положения гидродомкратов 5, 6 производят подъем качающейся части с ТПК 3. Перед подъемом КЧ транспортно-пусковые контейнеры и качающуюся часть освобождают от фиксации относительно шасси 1 МПУ.
Благодаря установке гидромеханических устройств фиксации транспортировочного положения ТПК и КЧ в магистраль подачи жидкости от насосного агрегата в поршневую полость гидроцилиндра 7 подъема КЧ обеспечивается последовательность: сначала - отстопоривание ТПК, после этого - отстопоривание КЧ, а затем - подъем КЧ. Это исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что значительно повышает надежность МПУ.
Одновременно с подъемом КЧ гидромеханическое устройство 8 вертикализации КЧ автоматически переходит из транспортировочного (походного) положения (фиг. 3) в промежуточное положение (фиг. 4). При этом разворачиваются шарнирно соединенные части 15,16 подкоса устройства вертикализации.
Для перевода гидромеханического устройства 8 вертикализации КЧ из промежуточного положения (фиг. 4) в рабочее положение (фиг. 5) жидкость под давлением от насосного агрегата подают в гидроцилиндр 25, где она воздействует на поршень, который сжимает пружину 26. При этом освобождаются от давления фрикционные диски 23, 24 и не самотормозящаяся винтовая передача 22 устройства 17 для регулирования длины. В результате этого части 15 и 16 подкоса устройства вертикализации опускаются под собственным весом и занимают положение, при котором их продольные оси располагаются на одной прямой. При этом в результате воздействия силы тяжести трубный элемент 20 втягивается внутрь трубного элемента 21 посредством вращения винта на гайке не самотормозящейся винтовой передачи 22, обеспечивая принятие подкосом рабочего положения (фиг. 5). Таким образом, подкос спрямляется. В процессе перемещения частей 15, 16 подкоса рычажный механизм 18 вступает во взаимодействие с шасси 1 и воздействует на шток одностороннего гидроцилиндра 19. Шток выдвигается из гидроцилиндра 19, при этом жидкость из штоковой полости гидроцилиндра вытесняется в бак насосного агрегата (на чертеже не показано). При изменении взаимного положении частей 15, 16 подкоса за счет относительного взаимного перемещения трубных элементов 20, 21 устройства 17 автоматически происходит компенсация изменения длины подкоса. После этого фрикционная муфта с помощью пружины 26 фиксирует не самотормозящуюся винтовую передачу 22. В результате этого КЧ с ТПК закрепляется в неподвижном положении.
После подъема КЧ с ТПК производят точную вертикализацию КЧ. По сигналу датчика вертикального положения КЧ и команде системы управления (на чертеже не показано) жидкость под давлением от насосного агрегата поступает в штоковую полость гидроцилиндра 7 подъема КЧ. При точной вертикализации КЧ одновременно включается в работу устройств 17 для регулирования длины. При достижении требуемой точности вертикализации КЧ по сигналу датчика вертикального положения подачу жидкости отключают. Таким образом, КЧ с ТПК надежно фиксируют в вертикальном положении.
С целью исключения влияния на вертикализацию КЧ температурных факторов, на период дежурства МПУ открывают односторонние гидрозамки (на чертеже не показано) штоковой и поршневой полостей гидроцилиндра 7 подъема КЧ. В этом случае КЧ удерживается в вертикальном положении с помощью гидромеханического устройства вертикализации КЧ. Исключение влияния температурных факторов (по существу - защиту полостей гидроцилиндра 7 подъема от повышения давления) в случае, когда односторонние гидрозамки гидроцилиндра 7 подъема закрыты и МПУ находится не в режиме дежурства, обеспечивают температурные клапаны (на чертеже не показано), гидравлически связанные соответственно со штоковой и поршневой полостями гидроцилиндра 7 подъема КЧ.
При приведении МПУ из рабочего положения в транспортировочное (походное) сначала МПУ переводят в промежуточное положение. Для этого посредством одностороннего гидроцилиндра 19 с помощью рычажного механизма 18 осуществляют сламывание подкоса гидромеханического устройства вертикализации КЧ. При этом жидкость под давлением от насосного агрегата подают в штоковую полость одностороннего гидроцилиндра 19. Шток гидроцилиндра 19, втягиваясь внутрь гидроцилиндра, с помощью рычажного механизма 18 сламывает подкос и приводит части 16, 15 подкоса в промежуточное положение. Одновременно приводится в действие устройство 17 для регулирования длины, работа которого была описана выше. После сламывания подкоса производят опускание КЧ в транспортировочное (походное) положение.
После опускания КЧ производится подъем гидродомкратов 5, 6 в транспортировочное положение. В первоначальный момент производится подъем гаек 11, фиксирующих поршни 13 гидродомкратов в выдвинутом положении. При этом жидкость под давлением от насосного агрегата поступает в гидромоторы 9, которые вращают винты 10, посредством которых фиксирующие гайки 11 поднимаются вверх. После подъема гаек 11 производится подъем штоков 14 гидродомкратов в транспортировочное положение.
Благодаря выполнению гидродомкратов 5, 6 с гидровинтовым приводом, включающим гидромотор 9, кинематически связанный с винтовой парой, выполненной с возможностью фиксации гидродомкрата в выдвинутом рабочем положении, также - наличию температурных компенсаторов, гидравлически связанных с поршневыми «а» и штоковыми «b» полостями соответствующих гидродомкратов, и - исключению влияния на вертикализацию КЧ (в рабочем положении установки) температурных факторов за счет использования в гидроцилиндре 7 подъема КЧ односторонних гидрозамков обеспечивается стабильное положение мобильной пусковой установки при длительном дежурстве (т.е. в рабочем положении).
Благодаря установке гидромеханических устройств фиксации транспортировочного положения ТПК и КЧ в магистраль подачи жидкости от насосного агрегата в поршневую полость гидроцилиндра 7 подъема КЧ обеспечивается последовательность: сначала - отстопоривание ТПК, после этого - отстопоривание КЧ, а затем - подъем КЧ. Это исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что значительно повышает надежность ПУ.
Наличие в гидравлическом приводе гидромеханического устройства 8 вертикализации КЧ позволяет стабилизировать КЧ в рабочем положении, исключив практически полностью влияние ветровых нагрузок.
Таким образом, благодаря особенности исполнения мобильной пусковой установки, изобретение позволяет обеспечить стабильное положение КЧ с ТПК в рабочем положении в период дежурства пусковой установки (по существу - обеспечивать требуемую вертикальность продольных осей ТПК с ракетами), что, в конечном счете, позволяет обеспечить повышение надежности ПУ и пусковой системы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| ГИДРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ФИКСАЦИИ КАЧАЮЩЕЙСЯ ЧАСТИ, УСТАНОВЛЕННОЙ НА ОСНОВАНИИ С ВОЗМОЖНОСТЬЮ ПОВОРОТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2016 |
|
RU2621803C1 |
| МОБИЛЬНАЯ ПУСКОВАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ ИЛИ ПАРОГАЗОГЕНЕРАТОРВ | 2014 |
|
RU2568820C2 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2386918C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВАНИЯ И МИНОМЕТНОГО СТАРТА РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА | 2014 |
|
RU2555056C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ БОЕВОЙ МАШИНЫ ГРУНТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2008 |
|
RU2404401C2 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВАНИЯ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ | 2003 |
|
RU2239764C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В МНОГОМЕСТНУЮ ШАХТНУЮ ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2008 |
|
RU2375248C1 |

Изобретение относится к вооружению и касается мобильных пусковых установок вертикального пуска. Мобильная пусковая установка (МПУ) содержит шасси, на котором с возможностью поворота в вертикальной плоскости установлена качающаяся часть (КЧ), выполненная с возможностью установки транспортно-пусковых контейнеров. МПУ также содержит систему управления, гидравлический привод, включающий гидродомкраты, гидроцилиндр подъема КЧ, устройство вертикализации КЧ, установленные на шасси датчики продольного и поперечного горизонтирования, установленный на КЧ датчик вертикального положения КЧ. Гидроцилиндр подъема КЧ шарнирно соединен с шасси и КЧ. При этом упомянутые датчики через систему управления электрически связаны с гидравлическим приводом. Достигается обеспечение стабильного положения КЧ с ТПК в вертикальном положении длительное время (во время дежурства), надежность. 5 з.п. ф-лы, 7 ил.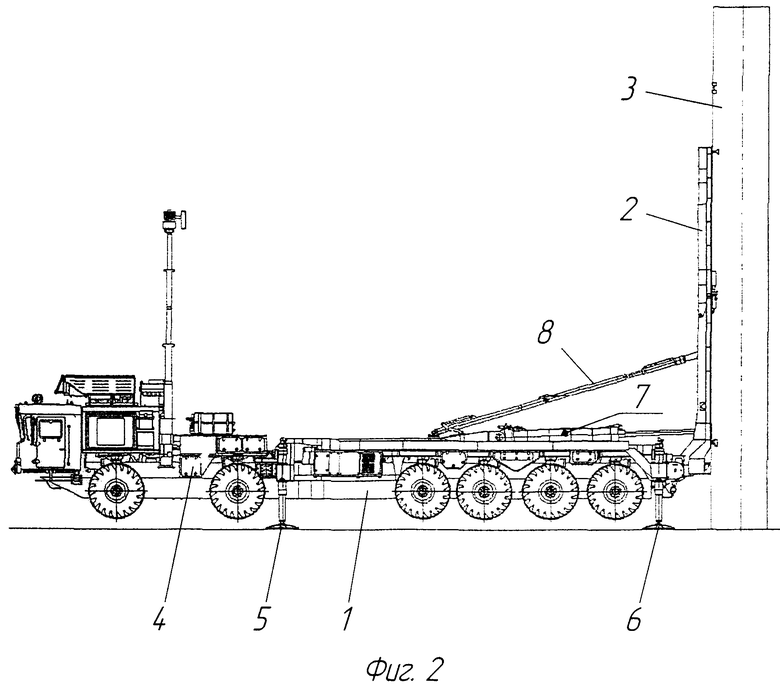
1. Мобильная пусковая установка (МПУ), содержащая шасси, на котором с возможностью поворота в вертикальной плоскости установлена качающаяся часть (КЧ), выполненная с возможностью установки транспортно-пусковых контейнеров (ТПК), систему управления, гидравлический привод, включающий гидродомкраты, установленные на шасси с возможностью контактирования с грунтом, гидроцилиндр подъема КЧ, который шарнирно соединен соответственно с шасси и КЧ, устройство вертикализации КЧ, установленные на шасси датчики продольного и поперечного горизонтирования, установленный на КЧ датчик вертикального положения КЧ, при этом упомянутые датчики через систему управления электрически связаны с гидравлическим приводом.
2. Установка по п.1, отличающаяся тем, что устройство вертикализации КЧ включает регулируемый по длине подкос, один из концов которого шарнирно соединен с шасси, а другой - с КЧ, при этом подкос состоит из двух шарнирно соединенных частей, которые выполнены с возможностью расположения на одной прямой в рабочем положении установки, и оснащен устройством сламывания и устройством для регулирования длины, причем в плане подкос расположен в вертикальной плоскости, в которой расположена продольная ось гидроцилиндра подъема КЧ.
3. Установка по п.2, отличающаяся тем, что устройство сламывания включает исполнительный гидроцилиндр, корпус которого шарнирно соединен с подкосом, а шток - со смонтированным на подкосе рычажным механизмом, выполненным с возможностью взаимодействия с шасси.
4. Установка по п.2, отличающаяся тем, что устройство для регулирования длины выполнено в виде телескопического соединения двух трубных элементов, соединенных между собой посредством не самотормозящейся винтовой передачи с фиксирующей фрикционной муфтой с гидроцилиндром.
5. Установка по п.1, отличающаяся тем, что гидродомкраты выполнены каждый с гидровинтовым приводом, включающим гидромотор, кинематически связанный с винтовой парой, выполненной с возможностью обеспечения фиксации гидродомкрата в рабочем положении установки.
6. Установка по п.1, отличающаяся тем, что содержит средства для фиксации в транспортировочном положении установки соответственно КЧ и ТПК относительно шасси, причем упомянутые средства смонтированы таким образом, что подъем КЧ возможен после освобождения от фиксации относительно шасси сначала ТПК, а затем - КЧ.
| US 5682005 A, 28.10.1997 | |||
| US 5465808 A, 14.11.1995 | |||
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА | 2008 |
|
RU2386918C1 |
| САМОХОДНАЯ ПУСКОВАЯ УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВАНИЯ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ | 2003 |
|
RU2239764C1 |
| US 2014174283 A1, 26.06.2014. | |||

