Изобретение относится к реактивной технике, а конкретно к самоходным пусковым установкам (СПУ) реактивной системы залпового огня (РСЗО), предназначенным для транспортировки, наведения на цель и пуска неуправляемых реактивных снарядов (НУРС), и может быть использована для поражения залпами НУРС площадных (протяженных) целей как с открытых, так и с закрытых огневых позиций (ЗОП). Выполнение боевой машины (БМ) на базовом шасси танка позволяет использовать ее в различных видах наступательного и оборонительного боя в качестве средства непосредственной огневой поддержки мотопехоты и танков, продвигаясь в их боевых порядках, как в составе подразделения, так и одиночно.
Известна СПУ РСЗО (см. журнал "Soldat und Technik", 1981, N 7, с. 372, рис. 1-3, или журнал "Военный Парад", 1997, N 2(20), март-апрель. М.: ЗАО "Военный Парад", с. 34-35) отечественного производства (БМ - 27), выполненная на колесном шасси, с двумя парами (боковая и кормовая) аутригеров и снабженная опорно-поворотной платформой с выносными кронштейнами, на которых через оси цапф закреплена люлька пакета направляющих пусковых труб под ракеты.
Платформа поворачивается по горизонту на 360o, а люлька имеет угол подъема по вертикали 50o, при этом максимальный угол обстрела по горизонту составляет 240o, а по вертикали от +15o до +50o. Стрельба возможна одиночными ракетами, залпом или полузалпом. Платформа и люлька снабжены силовыми гидроприводами, панель для их управления размещена внутри кабины экипажа, которая снабжена прибором наблюдения и прицеливания. СПУ предназначена для ведения огня с дальней дистанции. Конструкция СПУ и ее предназначение (значительный вес люльки) с большими инерционными нагрузками (значительная удаленность от противника) с незначительными скоростями подготовки к стрельбе не позволяет использовать, например, танковую систему управления огнем (СУО), да ее и нецелесообразно использовать на СПУ РСЗО, так как танковая СУО предназначена для обеспечения поражения огнем видимых целей одиночными выстрелами сходу без остановки, а стрельба по невидимым целям является второстепенным видом стрельбы, поэтому танки дополнительно снабжаются автономными приборами, которые являются элементами танковых СУО.
Недостатком известной СПУ является то, что она не имеет строго - автоматической СУО для стрельбы по невидимым целям, а снабжена рядом приборов, которые используются автономно для, например, определения дальности до цели и подготовки СПУ для стрельбы.
Известна тяжелая огнеметная система "ТОС - 1" (см. журнал "Военный Парад", 1998, N 2(26), март-апрель. М.: ЗАО "Военный Парад", с. 43), разработчиком которой является заявитель настоящей заявки.
ТОС - 1 предназначена для комплексного поражения целей за счет воздействия высоких температур и избыточного давления. ТОС - 1 может передвигаться в боевых порядках мотопехоты и танков, поражать атакующую живую силу противника с открытых и закрытых огневых позиций. В состав ТОС -1 входит боевая машина РСЗО, выполненная на базовом шасси танка, которая содержит пусковую установку (ПУ), включающую поворотную платформу (ПП) с выносными кронштейнами, на которых через оси цапф и опорные кронштейны закреплен транспортно-пусковой контейнер (ТПК) с 30-ю направляющими пусковыми трубами для НУРС. Наведение ПУ на цель в горизонтальной и вертикальной плоскостях производится силовыми следящими приводами от СУО, состоящей из прицела, квантового дальномера (КД), баллистического вычислителя (БВ) и датчика крена. На фотографии в журнале показан опытный образец БМ, который в настоящее время находится на стадии испытаний его различных систем.
Недостатком известного образца боевой машины является следующее:
- недостаточная автоматизация ввода данных в СУО пусковой установки;
- нерациональное использование забронированного пространства приборов и исполнительных механизмов, в том числе привода горизонтального наведения и гидростопоров ПП;
- в системе управления стопором ПП отсутствует подстраховка утечки рабочей жидкости из штоковой полости тормозного гидроцилиндра;
- отсутствие надежного стопорения ПП относительно базового шасси.
Вышеупомянутая тяжелая огнеметная система "ТОС-1" является прототипом.
Целью настоящего изобретения является повышение тактико-технических характеристик (ТТХ) БМ за счет совершенствования ее конструкции.
Поставленная цель достигается за счет того, что в систему управления огнем введены датчики крена и дифферента, подключенные к баллистическому вычислителю (БВ), а в качестве оптического прицела использован качающийся панорамный прицел, на отражателе которого закреплен датчик суммы углов дифферента ПП и угла места цели, подключенный к БВ, а на дифференциале механизмов горизонтирования прицела и ввода углов вертикального наведения в прицел дополнительно закреплен сумматор (датчик) углов места цели, прицеливания и дифферента ПП, который подключен к электрогидравлической системе привода вертикального наведения (ВН), причем электрические выходы БВ и прицела подключены к электрогидравлической системе привода ВН через переключатель режимов работы, при этом привод ВН, ПУ и датчик обратной связи последовательно соединены между собой, а датчик обратной связи выполнен в виде принимающего прибора, корпус которого жестко закреплен на ступице выносного кронштейна ПП, а его выходной вал через промежуточный вал и соединительное устройство связан со ступицей опорного кронштейна ТПК, причем соединительное устройство выполнено в виде закрепленной на конце промежуточного вала клеммы с пазом, снабженной пружиной и закрепленной с зазором относительно торцевой поверхности ступицы опорного кронштейна, на которой жестко закреплен поводок, взаимодействующий с пазом клеммы, а пружина клеммы закреплена одним концом на ступице, а другим на продольной стенке паза, при этом в приводе наведения в горизонтальной плоскости зубчатый венец подвижной части погонного устройства находится в зацеплении с шестернями гидравлических фрикционных конических стопоров ПП с электрогидравлической системой управления, в напорную гидролинию которой дополнительно установлены гидрозамок, гидроаккумулятор и реле давления, последнее из которых связано электрически с электрокраном предохранительного клапана и электромагнитом распределителя, включающим систему, а встроенный в стопор электровыключатель - с электрокраном и электромагнитом распределителя, выключающим систему, при этом стопор ПП выполнен в виде конического корпуса, закрепленного на корпусе шасси, внутри которого установлен поршень, связанный своим штоком с конусообразным основанием, снабженным наружной шестерней, находящейся в постоянном зацеплении с зубчатым венцом подвижного погона, а между основанием и корпусом установлены фрикционные вкладыши.
Анализ отличительных признаков изобретения показал, что:
- введение в СУО датчиков крена и дифферента, подключенных к БВ, использование в качестве оптического прицела качающегося панорамного прицела, на отражателе которого закреплен датчик суммы углов дифферента ПП и угла места цели, подключенный к БВ, дополнительное закрепление на дифференциале механизмов горизонтирования прицела и ввода углов вертикального наведения сумматора (датчика) углов места, прицеливания и дифферента ПП, который подключен к электрогидравлической системе привода вертикального наведения (ВН), а электрические выходы БВ и прицела подключены к электрогидравлической системе привода ВН через переключатель режимов работы, обеспечило уменьшение времени подготовки к открытию огня за счет автоматизации ввода данных стрельбы в СУО;
- последовательное соединение привода ВН, ПУ и датчика обратной связи, который выполнен в виде принимающего прибора, обеспечило точность отработки исходных команд, что повысило точность вертикального наведения;
- жесткое закрепление корпуса принимающего прибора на ступице выносного кронштейна ПП и связь его выходного вала со ступицей опорного кронштейна ТПК через соединительное устройство, выполненное в виде закрепленной на конце промежуточного вала клеммы с пазом, снабженной пружиной и закрепленной с зазором относительно торцевой поверхности ступицы опорного кронштейна, на которой жестко закреплен поводок, взаимодействующий с пазом клеммы, а пружина клеммы закреплена одним концом на ступице, а другим на продольной стенке паза, исключило проворот промежуточного вала и тем самым повысило точность вертикального наведения;
- снабжение привода наведения в горизонтальной плоскости гидравлическими фрикционными коническими стопорами ПП, выполненными в виде конического корпуса, закрепленного на корпусе шасси, внутри которого установлен поршень, связанный своим штоком с конусообразным основанием, снабженным наружной шестерней, находящейся в постоянном зацеплении с зубчатым венцом подвижного погона, а между основанием и корпусом установлены фрикционные вкладыши, обеспечило бесступенчатое стопорение ПП с последующей надежной блокировкой ее от разворота в процессе стрельбы;
- установка в напорную гидролинию электрогидравлической системы управления стопоров ПП гидрозамка, гидроаккумулятора и реле давления, последнее из которых связано электрически с электрокраном предохранительного клапана и электромагнитом распределителя, включающим систему, а встроенный в стопор выключатель - с электрокраном и электромагнитом распределителя, выключающим систему, значительно повысило надежность стопорения и при этом исключило утечки рабочей жидкости.
Изобретение поясняется чертежами, где:
на фиг. 1 изображен общий вид БМ (вид сбоку);
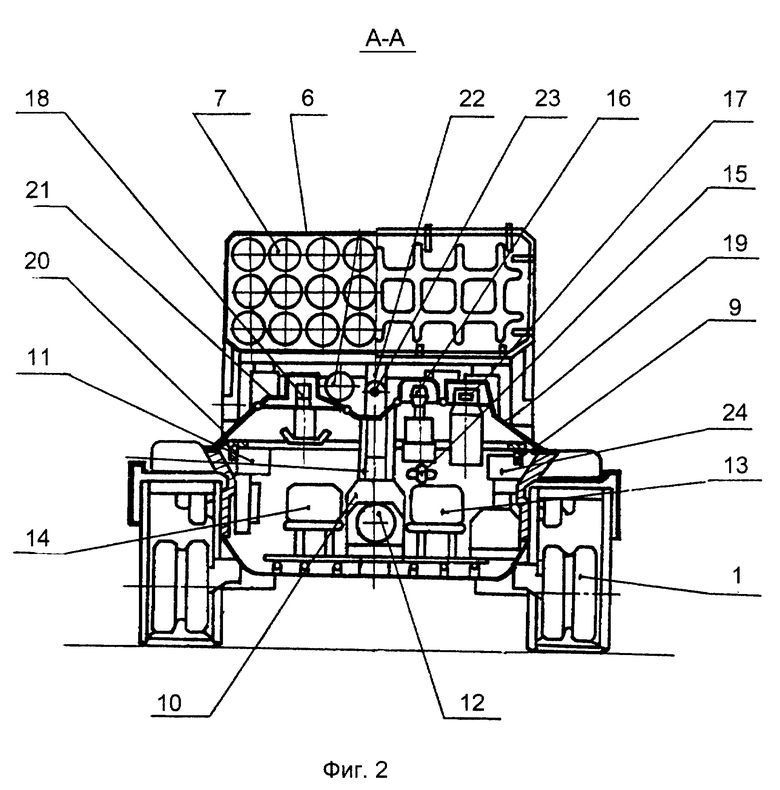
на фиг. 2 - сечение A-A фиг. 1;
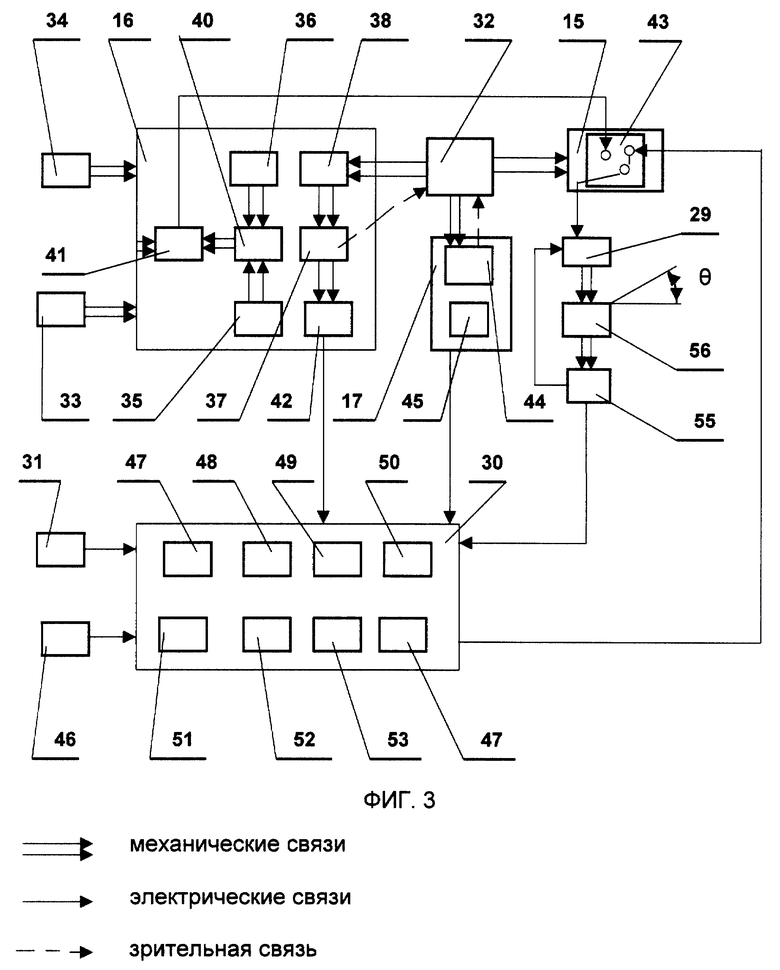
на фиг. 3 - блок-схема СУО по вертикальному наведению (ВН);
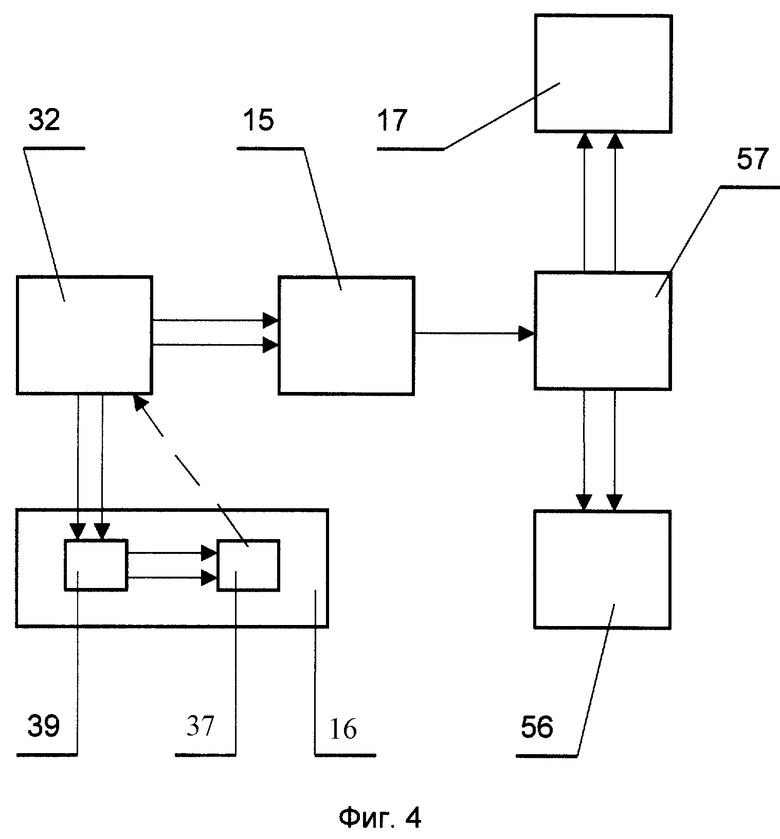
на фиг. 4 - блок-схема СУО по горизонтальному наведению (ГН);
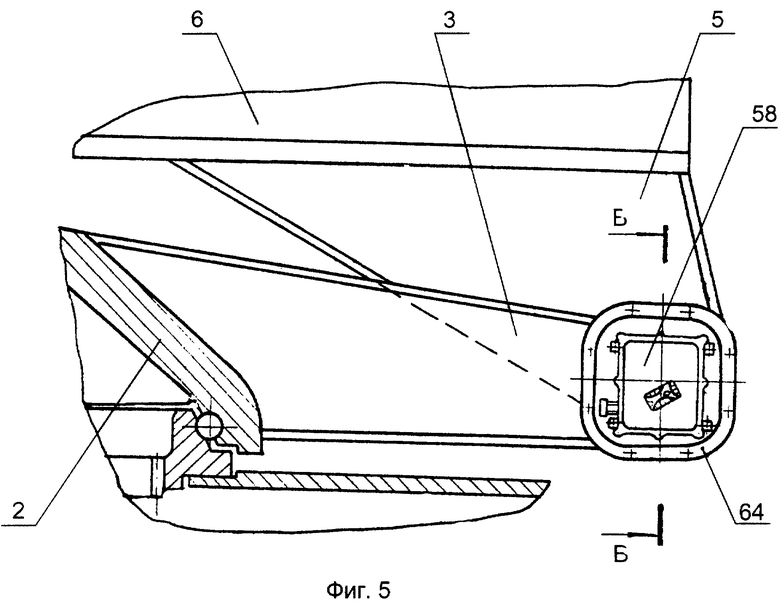
на фиг. 5 - цапфенный узел с принимающим прибором;
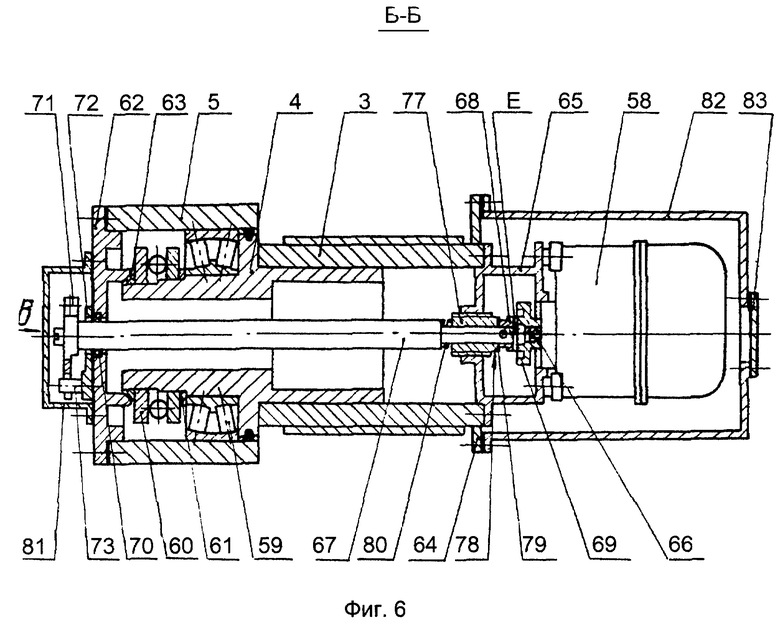
на фиг. 6 - сечение Б-Б фиг. 5;
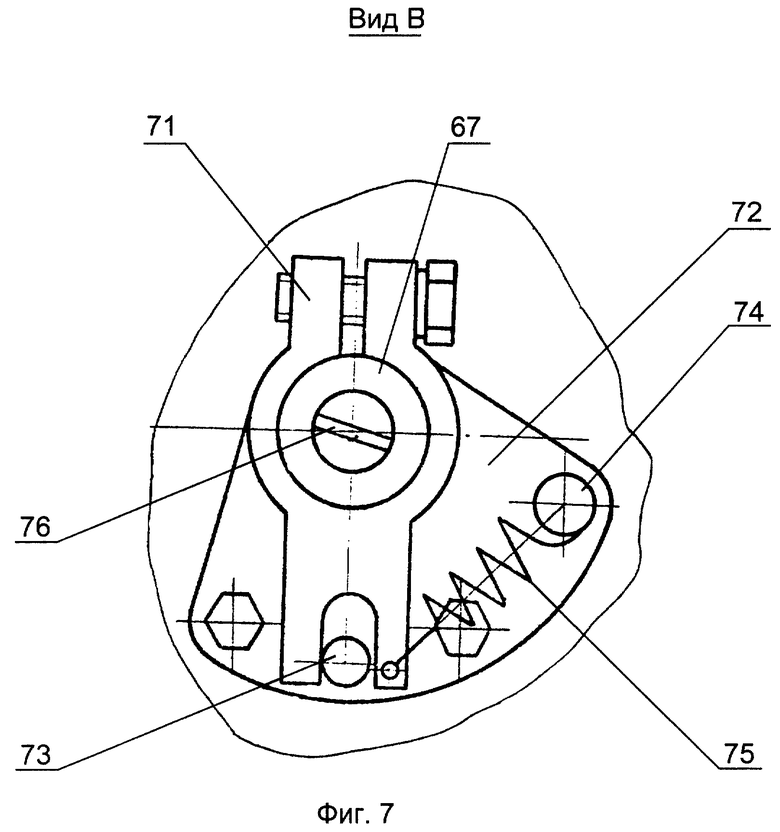
на фиг. 7 - вид B фиг. 6;
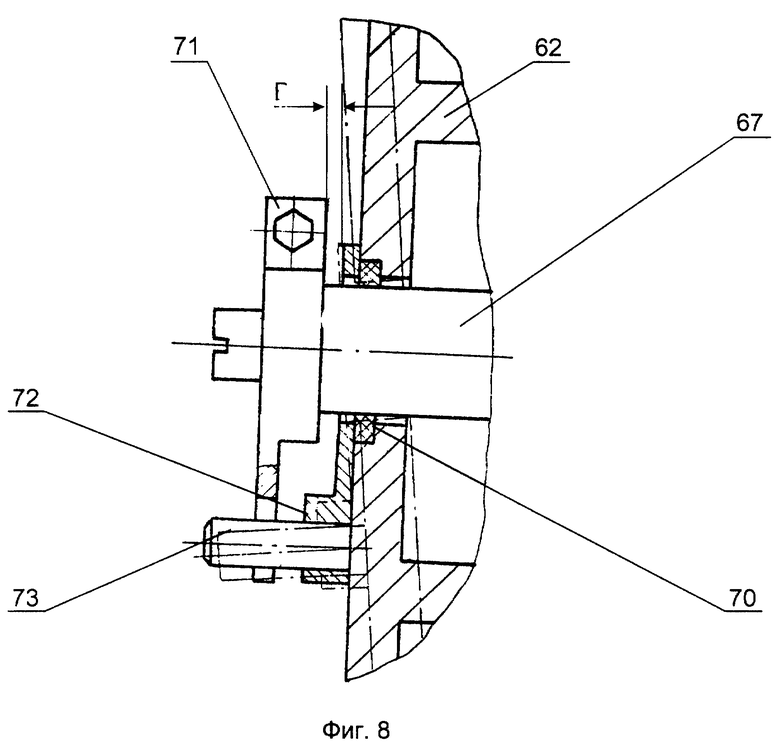
на фиг. 8 показана работа соединительного устройства при компенсации углового перемещения кронштейнов ПП и ТПК;
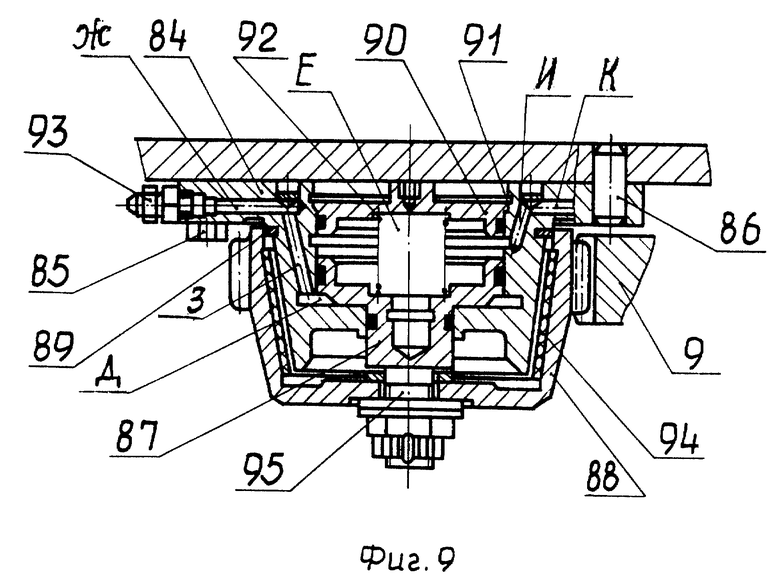
на фиг. 9 - стопор ПП;
на фиг. 10 - принципиальная схема системы управления стопором ПП.
Боевая машина (БМ) реактивной системы залпового огня (РСЗО) (см. фиг. 1, 2) содержит базовое шасси 1 танка с сохранением конструктивного исполнения и взаимного расположения узлов и механизмов силовой установки, трансмиссии, отделения управления механика - водителя и ходовой части.
На шасси 1 смонтирована пусковая установка (ПУ), включающая поворотную платформу (ПП) 2 с выносными кронштейнами 3, на которых через оси цапф 4 и опорные кронштейны 5 закреплен транспортно-пусковой контейнер (ТПК) 6 с направляющими пусковыми трубами 7 под ракеты 8. С целью снижения высотных габаритов БМ (по сравнению ТОС-1) ТПК6 удлинен и выполнен с трехрядным размещением пусковых труб 7 (всего 24), которые выполнены с возможностью пуска, как минимум, двух типов ракет 8 по энергетической мощности. ПП неподвижно соединена с подвижным погоном 9 погонного устройства танка и совместно с корпусом шасси 1 образует боевое отделение, внутри которого закреплены аппаратура силовых приводов 10, механизм привода горизонтального наведения (ГН) 11, корпус станции привода вертикального наведения (ВН) 12, сидения наводчика 13 и командира 14, пульт управления 15 приводами наведения ПУ, прицел 16, дальномер 17, прибор наблюдения 18 командира с выводом оптических входных окон наружу. Снаружи на ПП закреплены люк 19 наводчика, люк 20 командира и башенка 21 командира. Спереди по оси ПП смонтировано устройство 22 с гидроцилиндром 23, соединенным с гидросистемой 24 танка для стопорения ТПК в транспортном положении. А для обеспечения устойчивости БМ во время ведения огня на кормовом листе корпуса шасси 1 закреплены через шарниры поворотные выносные опоры 25 с гидравлическими приводами 26, соединенными с гидросистемой 24, а спереди закреплена гидравлическая опора 27, при этом на корпусе шасси 1 спереди смонтированы пусковые трубы 28 системы дистанционной постановки дымовой завесы.
Наводка ПУ на цель по вертикали производится с помощью электрогидравлического привода ВН 29, а по горизонту с помощью электрогидравлического или механического приводов ГН. Все операции по автоматическому наведению ПУ на цель осуществляются с помощью системы управления огнем (СУО). СУО (см. фиг 3) включает оптический качающийся панорамный прицел 16, квантовый дальномер 17, баллистический вычислитель (БВ) 30, датчик дифферента 31, привод ВН 29, пульт управления 15. Системой управляет, например, наводчик 32. Прицел 16 содержит механизм 33 поперечного горизонтирования (по углу крена ПП), механизм 34 продольного горизонтирования (до углу дифферента ПП), механизм 35 ввода угла места цели ε, механизм 36 ввода угла прицеливания α и механизм поворота головного отражателя 37 прицела 16: 38 - по вертикали, 39 - по горизонту. На механическом дифференциале 40 механизмов углов ψ,ε и α 34,35 и 36 закреплены датчик (сумматор) 41 (вращающийся трансформатор) суммы углов дифферента ψ ПП места цели ε и прицеливания α(ψ+ε+α), вводимых в прицел 16 этими механизмами. На отражателе 37 прицела 16 закреплен датчик 42 суммы углов дифферента ψ ПП и места цели ε(ψ+ε) Датчик (сумматор) 41 через переключатель 43 режимов работы пульта управления 15 электрически связан с электрогидравлической системой привода ВН 29. Датчик 42 и дальномер 17 подключены к БВ 30. Головное зеркало 44 дальномера 17 наводится на цель наводчиком 32 по вертикали вручную, по горизонту - приводом ГН. Дальномер 17 имеет визуальный индикатор дальности 45. Система имеет датчики 31 угла дифферента ψ и 46 угла крена γ ПП, подключенные к БВ 30 для автоматического ввода углов ψ и γ в БВ 30, а также механизмы ввода вручную данных в БВ 30:
47 - продольной составляющей скорости баллистического ветра Wx;
48 - поперечной составляющей скорости баллистического ветра Wz,
49 - температуры воздуха tb;
50 - температуры заряда снаряда (ракеты 8) t3;
51 - дальности Д;
52 - угла места цели ε
БВ 30 имеет визуальные индикаторы вычисляемых им углов прицеливания α 53 и угломера β 54 прицела 16.
БВ 30 через переключатель 43 "БВ - ПРИЦЕЛ" пульта управления 15 подключен к электрогидравлической системе привода ВН 29.
Датчик 55 (вращающийся трансформатор) выдает сигналы обратной связи об угле возвышения θ ПУ 56 на БВ 30 и в электрогидравлическую систему привода ВН 29.
Система ГН (фиг. 4) включает оптический качающийся панорамный прицел 16 с механизмом 39 разворота отражателя по горизонту, пульта управления 15, электрогидравлическую систему привода ГН 57. Системой ГН управляет наводчик 32 вручную.
На датчик 55 поступает электрический сигнал от принимающего прибора 58 (см. фиг. 5-8), установленного на цапфенном узле, содержащем цапфу 4, выполненную в виде ступенчатой полой оси, один конец которой неподвижно закреплен в ступице выносного кронштейна 3 ПП, а другой конец оси посредством подшипникового узла, состоящего из сферического роликового подшипника 59, компенсирующего угловое перемещение ТПК6 и упорного однорядного подшипника 60, воспринимающего осевые нагрузки, соединен со ступицей кронштейна 5 ТПК6. Между подшипниками 59 и 60 установлена разделительная шайба 61. Подшипниковый узел закрыт крышкой 62, которая подпирает его через шайбу 63. Ступица кронштейна 3 выполнена в виде втулки, имеющей на одном конце фланец 64. Прибор 58 установлен на кронштейне 65, жестко связанном с ступицей кронштейна 3. Кронштейн 65 имеет цилиндрическую направляющую для центрирования прибора 58, выходной вал 66 которого связан с промежуточным валом 67, снабженным полумуфтой 68, которая связана с полумуфтой 69, закрепленной на валу 66 прибора 58. Второй конец вала 67 проходит в отверстие крышки 62, имеющей цилиндрическую проточку, в которую установлено резиновое кольцо 70 и связан с соединительным устройством, состоящим из клеммы 71, жестко связанной с валом 67, причем клемма 71 установлена на валу 67 таким образом, чтобы зазор "B" был равным 3 - 8 мм от кронштейна 72, закрепленного на крышке 62, имеющего ведущий поводок штифта 73 и палец 74. Кронштейн 72 соединен с клеммой 71 посредством люфтовыбирающей пружины 75. На конце вала 67 имеется паз 76 под отвертку, посредством которого производится плавная настройка прибора 58. На другом конце вала 67 надета бронзовая втулка 77, выполненная с наружной резьбой и лысками 78 под ключ, кроме того, по торцам втулки 77 установлены шайба 79 и пружина 80, служащая для выборки зазоров, возникающих при изготовлении и сборке. Втулка 77 связана с кронштейном 65 посредством резьбы. Для выставки эксплуатационного зазора Л=0,9-1,1 мм через окно в кронштейне 65, гаечным ключом за лыски 78 вращают втулку 77, которая ввинчиваясь или вывинчиваясь по резьбе в кронштейне 65 через шайбу 79 перемещает вал 67 вправо или влево. После выставки зазора Л положение втулки 77 фиксируется проволокой (на черт. не показано). Цапфенный узел с одной стороны закрыт крышкой 81, а с другой стороны - кожухом 82, имеющим смотровое окно, закрытое крышкой 83.
Для бесступенчатого стопорения зубчатого венца подвижного погона 9 ПП, с последующим удержанием ее от разворота при воздействии больших ударных нагрузок в процессе стрельбы ракетами 8 машина снабжена двумя электрогидравлическими фрикционными коническими стопорами (см. фиг. 9), каждый из которых содержит корпус 84, связанный с крышкой корпуса шасси 1 болтами 85 и силовыми штифтами 86. Корпус 84 имеет коническую поверхность. В цилиндрической полости корпуса 84 установлен поршень 87. Стопорный элемент выполнен в виде шестерни 88 с коническим гнездом в ступице под конусную поверхность корпуса 84. Шестерня 88 постоянно находится в зацеплении с зубчатым венцом погона 9 и связана с поршнем 87. Конусные поверхности шестерни 88 (стопора) и корпуса 84 защищены уплотнительным кольцом 89. Цилиндрическая полость заглушена крышкой 90, которая удерживается стопорным кольцом 91. Пружина 92 обеспечивает разобращение конусных поверхностей корпуса 84 и шестерни 88 при отсутствии давления рабочей жидкости в полостях Д и E. В полость Д рабочая жидкость подается через штуцер 93, каналы Ж, 3, а в полость E - через штуцер и каналы К, И. Наличие вкладышей 94, установленных по конической поверхности шестерни 88 и изготовленных из фрикционного материала, например "ретанакс", обеспечивает высокий коэффициент трения и позволяет создать высокое удельное давление на трущихся поверхностях в процессе стопорения. Угол конусности корпуса 84 и шестерни 88 выбран равным в пределах 21 - 23o. Шестерня 88 подвижно с возможностью вращения закреплена в штоке 95 поршня 87. Стопор ПП управляется электрогидравлической системой, включающей (см. фиг. 10) насос 96, распределитель 97, гидрозамок 98, гидроаккумулятор 99, реле давления 100, предохранительный клапан 101 с электрокраном 102, фильтр 103 и гидробак 104. Свободный конец штока 95 поршня 87 контактирует с электровыключателем 105. Распределитель 97 управляется электромагнитами 106 и 107. Реле давления 100 имеет электровыключатель с контактом "∂", который электрически связан с электрокраном 102 предохранительного клапана 101 и электромагнитом 107 распределителя 97 на включение системы стопорения ПП (силовой следящий привод и механизм вращения ПП на черт. не показаны). Электрокран 102 имеет электромагнит 108. Электрические реле 109 и 110, в которых реле 109 имеет замыкающий контакт "а" и переключатель "б", а реле 110 - два замыкающих контакта "в" и "г", причем последовательно каждому реле 109, 110 введены выключатели 111 и 112. Элементы питания и защиты электросхемы, а также элементы связи с электросхемой горизонтального наведения не показаны.
БМ может быть использована для поражения залпами НУРС площадных целей как с открытых (цель видна), так и с закрытых огневых позиций (по невидимым целям). БМ ведет огонь с остановок без выхода экипажа из машины. От силовой установки шасси 1 подается питание на привода наведения 29 и 57 ПУ, одновременно автоматически происходит расстопоривание ТПК гидроцилиндром 23 и гидростопором ПП, а также опускание выносных опор 25,27 на грунт. Поиск цели и наведения ПУ на цель осуществляется с помощью приборов наблюдения и СУО.
1. Режим с полуавтоматическим управлением.
1.1 С использованием квантового дальномера 17.
Переключатель 43 (фиг. 3) пульта 15 становится в положение "БВ".
Механизмы 33 поперечного и 34 продольного горизонтирования прицела 16 выставляются на начальные (нулевые) деления. БВ работает как вычислитель и как управляющий прибор.
ПУ 56 (фиг. 4) приводом ГН 57 наводится по перекрытию зеркала 44 дальномера 17 на цель, дальность измеряется дальномером 17 (фиг. 1) и автоматически вводится в БВ 30 в виде электрического сигнала, а также для визуального контроля высчитывается в метрах на индикаторе 45 дальномера 17.
Механизмами 47, 48, 49 и 50 в БВ 30 вводятся данные о продольной и поперечной составляющих скорости ветра Wx и Wz, температурах воздуха tв и заряда tз. Приводом ГН 57 и механизмом 38 поворота головного отражателя прицела 16 по вертикали наводится прицельная марка прицела 16 на цель, при этом датчик 42, закрепленный на головном отражателе прицела 16, выдает в БВ 30 электрический сигнал, пропорциональный сумме углов дифферента ψ ПП и угла места цели ε. Датчики 31 и 46 выдают в БВ 30 раздельно электрические сигналы, пропорциональные углам дифферента ψ и крена γ ПП.
В БВ 30 по дальности Д рассчитывается угол прицеливания α : угол дифферента ψ и места цели ε (по датчику 42), по полученному углу места цели ε и дальности Д рассчитывается поправка Δεα на угол места цели ε в угол прицеливания α по продольной составляющей скорости ветра Wx, температурам воздуха tв и заряда снаряда tз и дальности Д рассчитываются остальные поправки в угол прицеливания. Далее угол дифферента ψ ПП, угол места цели ε, угол прицеливания α и все поправки в последний суммируются в полный угол ВН θ, сигнал о котором выдается в электрогидравлическую систему привода ВН 29.
Одновременно в БВ 30 по дальности Д, поперечной составляющей скорости ветра Wz и углу крена γ вычисляется угломер β прицела и высвечивается на индикаторе 54. Наводчик механизмом 39 (фиг. 4) вводит вычисленный БВ угломер в прицеле 16 и приводом ГН 57 доворачивает ПУ 56 на цель.
По команде ПОДЪЕМ с пульта управления 15 привода ВН 29 поднимает ТПК6 на выработанный БВ 30 угол, датчик 55 выдает сигнал обратной связи на БВ 30. При равенстве электрических величин прямого и обратного сигналов привод ВН 29 прекратит отработку угла подъема ТПК6. После стопорения ПП машина готова к залпу.
1.2 Без использования квантового дальномера.
Отличие этого подрежима от предыдущего заключается в том, что дальномер 17 СУО не работает и дальность Д до цели определяется одним из известных способов (по дальномерным шкалам прицела, дальномером другой БМ, по карте и т.д.) и вводится в БВ 30 вручную механизмом 51.
В остальном система работает аналогично п.1.1.
2. Режим ручного управления
Датчик 42 суммы углов дифферента ψ ПП и места цели ε(ψ+ε), 31 угла дифферента ψ и 46 угла крена γ от системы отключены (вместе с БВ).
Переключатель 43 пульта 15 ставится в положение "ПРИЦЕЛ". ПУ 56 (фиг. 4) приводом ГН 57 наводится на цель. Далее механизмами 33 и 34 прицел 16 горизонтирунтся по уровням, при этом прицельная марка уходит с точки наводки на угол боковой поправки Δβγ на угол крена γ, а через дифференциал 40 в датчик 41 вводится угол дифферента ψ ПП. После горизонтирования прицела 16 ПУ 56 приводом ГН 57 (фиг. 2) доворачивается до цели и механизмом 38 (фиг. 1) поворота головного отражателя прицела 16 измеряется место цели ε. Дальномером 17 измеряется дальность Д до цели, которая высвечивается на индикаторе 45.
Далее по дальности Д и поперечной слагающей скорости ветра по таблицам стрельбы вычисляется и механизмом 39 вводится в угломер прицела 16 боковая поправка Δβw на скорость ветра.
Далее по таблицам стрельбы вычисляются: по дальности Д - угол прицеливания α, по дальности Д, продольной составляющей скорости ветра Wx, температура воздуха tв и заряда tз и углу места цели ε - соответствующие поправки Δα в угол прицеливания α После этого в прицел 16 вводятся: механизмом 35 угол места цели ε а механизмом 36 угол прицеливания α с поправкой Δα
Дифференциал 40 механизмов 34, 35 и 36 суммируют углы дифферента ψ места цели ε прицеливания α с (поправками) в полный угол вертикального наведения θ в систему привода ВН 29. По команде "ПОДЪЕМ" с пульта 15 привод ВН 29 поднимает ТПК 6 на заданный угол, датчик 55 выдает сигнал обратной связи в систему привода ВН 29. При равенстве величин прямого и обратного сигналов привод ВН 29 прекратит отработку угла подъема ТПК 6. После стопорения ПП машина готова к залпу.
3. Стрельба по невидимым целям (с ЗОП).
Переключатель 43 ставится в положение "ПРИЦЕЛ", датчики 31 и 46 углов дифферента ψ крена γ ПП и датчик 42 суммы углов дифферента ψ ПП и места цели ε отключаются от БВ 30, последний работает только как вычислитель. После привязки БМ к местности по карте или иным путем определяется дальность Д до цели и угол места цели ε вводятся БВ 30 механизмами 51 и 52, а угол ε, кроме того, - в прицел 16 механизмом 35. В БВ 30 механизмами 47, 48, 49 и 50 вводятся также данные о продольной и поперечной составляющих скорости ветра Wx, и Wz, температурах tв и tз; на индикаторе 53 БВ высвечивается угол прицеливания α, а на индикаторе 54 - угломер прицела 16. Далее, приводом ГН 57 (фиг. 4) ПУ56 наводится на цель (с учетом угла между направлением на цель и направлением на точку наводки). Механизмами 33 и 34 прицела 16 горизонтируется по уровням, при этом марка прицела 16 уходит с точки наводки на угол боковой поправки Δβγ на угол крена γ, а через дифференциал 40 в датчик 41 вводится угол ψ ПП. В угломер прицела 16 по точке наводки вводится поправка на боковой ветер Δβw полученная как разность между угломером на индикаторе БВ и датчике 55 обратной связи; и ПУ доворачивается на цель на сумму боковых поправок Δβw и Δβγ. Далее механизмами 35, 40 в прицел 16 вводится угол ε и угол α (с поправками), при этом дифференциал 40 суммирует углы ψ,ε и α (с поправками) в полный угол BH θ, а датчик 41 выдает сигнал, пропорциональный этому углу в электрогидравлическую систему привода ВН 29. По команде "ПОДЪЕМ" с пульта 15 привод ВН 29 поднимает ТПК 6 на заданный угол, датчик 55 выдает сигнал обратной связи в привод ВН 29. При равенстве величин прямого и обратного сигналов привод ВН 29 прекратит отработку угла подъема ТПК 6. После стопорения ПП машина готова к залпу.
При подъеме ТПК 6 происходит поворот кронштейнов 5 (фиг. 5, 6) вокруг цапфы 4, при этом поворачивается и крышка 62. Вал 67 посредством клеммы 71 и поводка в виде штифта 73 связан с крышкой 62, причем зазор между штифтом 73 и стенкой паза клеммы 71 постоянно выбирается пружиной 75 (фиг. 7), установленной со стороны, противоположной направлению вращения крышки 62 относительно цапфы 4. При повороте крышки 62, штифт 73 поворачивается вместе с ней и ведет за собой вал 67, при этом угол поворота крышки 62 и вала 67 одинаков и передается на выходной вал 66 принимающего прибора 58, который вырабатывает электрический сигнал и передает его в цепи управления через датчик 55 (фиг. 3) привода ВН 29. В реальных условиях допускается работа БМ, имеющей определенный крен, в этом случае нагрузки на одну из цапф возрастают и возникает перекос осей цапф 4. Крышка 62 (фиг. 8) изменяет свое угловое положение, которое компенсируется частично за счет деформации резинового кольца 70 и частичным отклонением вала 67 (соединительная муфта допускает работу с перекосом полумуфт 68, 69), а отсутствие промежуточной опоры позволяет избежать заклинивания вала 67 и, следовательно, его скручивания, что дает возможность передавать угол поворота кронштейнов 5 ТПК 6 на выходной вал 66 прибора 58 без ошибок.
Перед залпом БМ после ее наведения на цель необходимо застопорить ПП ПУ, а перед вращением ПП ПУ необходимо ее расстопорить. Для этих операций БМ снабжена системой управления стопорами.
Перед началом вращения ПП2 выключателем 111 (фиг. 10) запитывается реле 109, которое контактами "а" и "б" включает электромагниты 107 и 108. Электромагнит 108 переключает электрокран 102, который переводит на рабочий режим предохранительный клапан 101, а электромагнит 107 переключает распределитель 97, тогда рабочая жидкость от насоса 96 через распределитель 97 подается в поршневую полость E гидроцилиндра. Шток 95 перемещается и отводит шестерню 88 от корпуса 84 - происходит отстопорение ПП. Слив рабочей жидкости из штоковой полости Д производится через открытый гидрозамок 98, распределитель 97, фильтр 103 в гидробак 104. В конце хода шток 95 нажимает на электровыключатель 105, контакты которого размыкаются, и прекращается питание реле 109. Контакты "а" и "б" выключают электромагниты 107 и 108. Одновременно выключается выключатель 111 и подача рабочей жидкости прекращается. При вращении ПП2 шестерня 88 проворачивается свободно.
После наведения ПУ на цель выключателем 112 запитывается реле 110, которое контактами "в" и "г" включает электромагниты 106 и 108, которые переключают распределитель 97 и электрокран 102, при этом рабочая жидкость насоса 96 через распределитель 97 и гидрозамок 98 подается в штоковую полость Д, а шток 95 прижимает шестерню 88 к корпусу 84 - происходит стопорение ПП. Усилие на ПП, возникающее от реактивного действия снарядов при стрельбе замыкается на корпус 84 через зубчатый венец 9, шестерню 88. Слив рабочей жидкости из поршневой полости E производится через распределитель 97, фильтр 103 и гидробак 104. В конце хода поршня 87 со штоком 95 возрастает давление рабочей жидкости - происходит зарядка гидроаккумулятора 99. Одновременно рабочая жидкость поступает в реле давления 100. При достижении заданного давления контакт "∂" электровыключателя реле давления 100 размыкается и прекращается питание реле 110. Контакты "в" и "г" выключают электромагниты 106 и 108. Подача рабочей жидкости прекращается. Насос 96 работает вхолостую через переливной золотник предохранительного клапана 101. Выключатель 112 остается во включенном положении.
Удержание шестерни 88 в застопоренном положении производится за счет герметичности гидрозамка 98.
При длительной задержке в пуске снарядов, при утечке рабочей жидкости, подпитка штоковой полости Д производится от гидроаккумулятора 99. В случае значительной потери давления, реле 100 своим контактом "∂" включает реле 110, которое, как было описано выше, включает систему управления на стопорение.
Выключатели 111 и 112 управляются автоматически от электросхемы привода ГН 57 (на схеме не показано).
Таким образом, БМ РСЗО, выполненная на базовом шасси танка, обладает повышенными по сравнению с известными аналогичными машинами ТТХ за счет меньшего времени подготовки к открытию огня, высокого быстродействия СУО и точности наведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА ШАССИ БАЗОВОГО ТАНКА | 2002 |
|
RU2217679C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА ШАССИ БАЗОВОГО ТАНКА (ВАРИАНТЫ) | 2002 |
|
RU2231736C1 |
| ТАНК С ЗЕНИТНЫМ ВООРУЖЕНИЕМ | 2002 |
|
RU2231737C1 |

Изобретение относится к ракетной технике, в частности к системам залпового огня. Предложенная боевая машина обеспечивает повышение тактико-технических характеристик. Сущность изобретения заключается в том, что в боевой машине разработана система управления пусковой установкой, приближенная к танковой системе. Система управления огнем обеспечивает стрельбу реактивными залпами по видимым целям в режимах с полуавтоматическим управлением с использованием квантового дальномера и без него и в режиме с ручным управлением с использованием баллистического вычислителя в качестве решающего прибора и без него. 10 ил.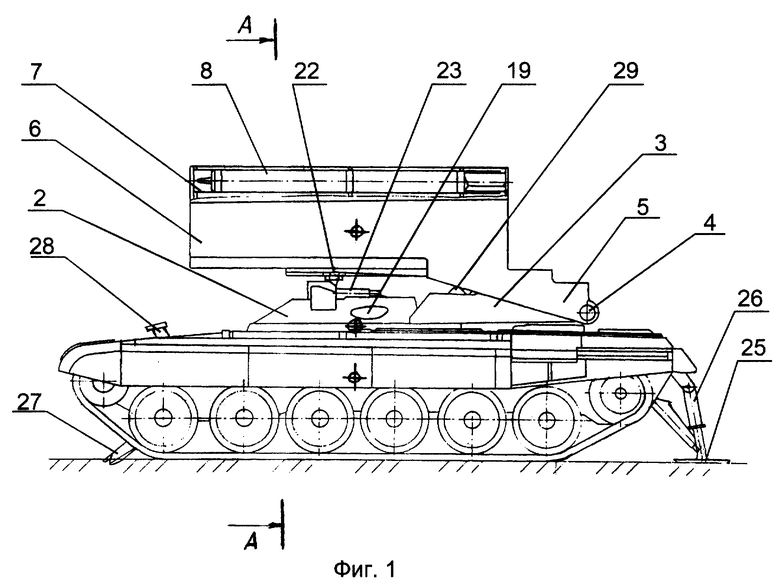
Боевая машина реактивной системы залпового огня на базовом шасси танка, содержащая погонное устройство танка, на котором закреплена пусковая установка (ПУ), оснащенная системой управления огнем (СУО) с приборами прицеливания и наблюдения и приводами наведения в горизонтальной и вертикальной плоскостях с электрогидравлической системой управления гидравлическими коническими стопорами ПУ, включающей поворотную платформу (ПП) с выносными кронштейнами, на которых через оси цапф и опорные кронштейны закреплен транспортно-пусковой контейнер (ТПК) с пусковыми трубами под ракеты, отличающаяся тем, что в систему управления огнем введены датчики крена и дифферента, подключенные к баллистическому вычислителю (БВ), а в качестве оптического прицела использован качающийся панорамный прицел, на отражателе которого закреплен датчик суммы углов дифферента ПП и угла места цели, подключенный к БВ, а на дифференциале механизмов горизонтирования прицела и ввода углов вертикального наведения в прицел дополнительно закреплен сумматор (датчик) углов места цели, прицеливания и дифферента ПП, который подключен к электрогидравлической системе привода вертикального наведения (ВН), причем электрические выходы БВ и прицела подключены к электрогидравлической системе привода ВН через переключатель режимов работы, при этом привод ВН, ПУ и датчик обратной связи последовательно соединены между собой, а датчик обратной связи выполнен в виде принимающего прибора, корпус которого жестко закреплен на ступице выносного кронштейна ПП, а его выходной вал через промежуточный вал и соединительное устройство связан со ступицей опорного кронштейна ТПК, причем соединительное устройство выполнено в виде закрепленной на конце промежуточного вала клеммы с пазом, снабженной пружиной и закрепленной с зазором относительно торцевой поверхности ступицы опорного кронштейна, на которой жестко закреплен поводок, взаимодействующий с пазом клеммы, а пружина клеммы закреплена одним концом на ступице, а другим на продольной стенке паза, при этом в приводе наведения в горизонтальной плоскости зубчатый венец подвижной части погонного устройства находится в зацеплении с шестернями гидравлических фрикционных конических стопоров ПП с электрогидравлической системой управления, в напорную гидролинию которой дополнительно установлены гидрозамок, гидроаккумулятор и реле давления, последнее из которых связано электрически с электрокраном предохранительного клапана и электромагнитом распределителя, выключающим систему, при этом стопор ПП выполнен в виде конического корпуса, закрепленного на корпусе шасси, внутри которого установлен поршень, связанный своим штоком с конусообразным основанием, снабженным наружной шестерней, находящейся в постоянном зацеплении с зубчатым венцом подвижного погона, а между основанием и корпусом установлены фрикционные вкладыши.
| Военный парад, 1998, № 2 (26) | |||
| - М.: ЗАО "Военный парад", с.43 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО СКАНИРОВАНИЯ ПРИ СТРЕЛЬБЕ ИЗ РЕАКТИВНЫХ ПУСКОВЫХ УСТАНОВОК | 1998 |
|
RU2137080C1 |
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| US 5263396 A, 23.11.1993 | |||
| СИНЕРГИЧЕСКАЯ ГЕРБИЦИДНАЯ КОМПОЗИЦИЯ, СОДЕРЖАЩАЯ ХЛОРАЦЕТАНИЛИДЫ И ПИКОЛИНОВЫЕ КИСЛОТЫ | 2008 |
|
RU2484627C2 |
| DE 3536858 С1, 06.11.1986 | |||
| СПОСОБ ДИАГНОСТИКИ ГИПЕРФЕРМЕНТЕМИИ ПРИ НАРУШЕНИИ ВНЕШНЕСЕКРЕТОРНОЙ ФУНКЦИИ ПОДЖЕЛУДОЧНОЙ ЖЕЛЕЗЫ | 2001 |
|
RU2216734C2 |

