Область техники
Настоящее изобретение относится к тренировочным устройствам и способам тренировки для развития и укрепления мускулатуры или суставов упражнениями по преодолению противодействующего усилия с измерительными приборами или без них, а именно к тренировочным устройствам и способам тренировки с использованием эксцентрической фазы тренировки.
Уровень техники
Эксцентрическая фаза тренировки - это фаза, при которой напряженная мышца удлиняется под нагрузкой. При эксцентрическом сокращении мышечно-сухожильный комплекс растягивается и поглощает механическую энергию. Продолжительная эксцентрическая тренировка вызывает ряд мышечных адаптаций, которые имеют существенные и желательные эффекты в восстановлении и в спортивных состязаниях. Мышцы способны производить гораздо больше эксцентрической силы в сравнении с концентрической. В эксцентрической фазе сила поступает из обоих сократительных элементов мышечных волокон, а также из вязкоупругих компонентов соединительной ткани. В то же время при концентрических сокращениях сила поступает только из сократительных элементов.
При выполнении эксцентрических упражнений высокой интенсивности мышечная масса увеличивается за счет роста поперечника волокон и числа саркомеров, преимущественно волокон II типа. В отличие от классической концентрической тренировки с отягощениями при эксцентрической тренировке гипертрофия происходит раньше. Также исследования показывают, что растяжение мышц в эксцентрической фазе стимулирует синтез мышечного протеина в большей степени, чем концентрическое сокращение.
Эксцентрические упражнения высокой интенсивности обеспечивают значительное увеличение силы, которое выше, чем при концентрических сокращениях. Имеющиеся научные данные для тренированных спортсменов показывают, что эксцентрические упражнения эффективны для увеличения силы. Кроме того, может увеличиваться взрывная сила. Принимая во внимание, что мышечное утомление может быть неполным при концентрических тренировках, использование эксцентрической фазы способно привести к большему утомлению двигательных единиц и, таким образом, создать дополнительный стимул к гипертрофии.
Регулярное выполнение эксцентрических упражнений приводит к увеличению сократительной части мышцы без визуального увеличения длины. В результате происходит два важных изменения функции мышцы: увеличивается скорость сокращения; пик усилия мышца развивает раньше. Это позволяет мышцам лучше предохранять суставы от повреждений при быстрых движениях - мышцы начинают сокращаться раньше, увеличивая контроль над движением. Это является одной из причин рекомендовать эксцентрические упражнения для профилактики травм и реабилитации.
Эксцентрические тренировки также требуют гораздо меньшего уровня потребления кислорода и нагрузки на сердечно-сосудистую систему, а также более низкого уровня воспринимаемой нагрузки для любого заданного уровня сложности упражнений. Таким образом, было доказано, что эксцентрические упражнения идеально подходят для пожилых людей и людей с сердечно-сосудистой недостаточностью, потому что они помогают быстро и безопасно наращивать мышцы и значительно уменьшают риск получения травм, не перегружая сердечно-сосудистую систему.
Некоторые известные устройства для развития силы уже приспособлены для эксцентрических тренировок.
Из патента ЕР 2263759 известно устройство, позволяющее оказывать на мышцу или группу мышц пользователя воздействие в эксцентрическом и концентрическом режиме. При этом по меньшей мере один пневматический цилиндр позволяет при выполнении упражнения ограничивать нагрузку в концентрической фазе тренировки по сравнению с эксцентрической.
Из патента US 4865315 известно программируемое устройство для контроля силы и управления силой как в концентрической, так и в эксцентрической фазах при выполнения физических упражнений, причем значения приложенной силы отображаются и записываются в реальном времени и могут быть переданы во внешние компьютерные системы. В данном устройстве реализована возможность подбора индивидуальных нагрузок для каждого пользователя.
Из патента US 5254066 известно устройство для приложения физической силы к пальцу, запястью, кисти и в целом к руке пользователя, позволяющее оказывать концентрическое и эксцентрическое воздействие на указанные части тела пользователя. Устройство предназначено для физической терапии, реабилитации и тренировки указанных частей тела.
Из публикации патентной заявки US 20150148203 известна противодействующая система для эксцентрических тренировок, в которой начальное движение педали или рукоятки происходит без усилия со стороны пользователя до достижения определенной позиции, где система начинает автоматически оказывать воздействие посредством гидравлического цилиндра в противоположном направлении для возвращения педали или рукоятки в начальное положение.
В рассмотренных документах конструкция каждого устройства предполагает использование груза или массы, которые и создают нагрузку на мышцы пользователя. При этом возможно ограничение этой нагрузки путем перекладывания части нагрузки на иной механизм (гидравлический цилиндр, электропривод). В случае использования груза большой массы часть груза может быть также переложена, а доля переложенной нагрузки ограничена мощностью приводов и нагрузочными массами используемых механизмов.
Из патента US 6716144 известно устройство, позволяющее выполнять упражнения для укрепления брюшного пресса с использованием упругих средств для создания сопротивления в эксцентрической фазе упражнения и поддержки в концентрической фазе упражнения. Недостатком данного изобретения является использование упругого, неуправляемого элемента (пружины). Подобный элемент не может позволить точно управлять прилагаемой нагрузкой.
Наиболее близким аналогом заявляемого изобретения является изобретение, раскрытое в патенте US 5476428, из которого известно приспособление для тренажера со стопой веса, содержащее вес, средства взаимодействия с весом, такие как подъемный механизм, электрический мотор, блок управления с элементами ввода, дисплей и микроконтроллер, позволяющие компенсировать часть веса при выполнении упражнения, а также регулировать вес в концентрической и эксцентрической фазах. Известное из патента US 5476428 приспособление для тренажера обеспечивает разнообразие тренировок и возможность приспосабливать их к индивидуальным потребностям пользователя благодаря возможности регулировать вес на протяжении всего хода подвижной части приспособления для тренажера.
Однако, учитывая приведенную выше информацию, концентрическая фаза упражнения менее эффективно нагружает мышцу, чем эксцентрическая фаза упражнения, и использование концентрической фазы в упражнении ограничивает эффективность тренировки в целом. Это ограничение присуще всем известным тренажерам, в том числе и наиболее близкому аналогу.
Таким образом, несмотря на большое многообразие известных тренажеров и соответствующих методик тренировок, остается насущной задача повышения эффективности силовых тренировок и создания соответствующих тренажеров.
Раскрытие изобретения
Задачей настоящего изобретения является повышение эффективности силовых тренировок
Поставленная задача решена созданием силового тренажера, который содержит раму, на которой установлены исполнительный механизм, с подвижной частью которого связаны средства взаимодействия с пользователем, выполненные с возможностью приема усилия от исполнительного механизма и имеющие первый участок хода, соответствующий растяжению целевой мышцы или группы мышц пользователя, и второй участок хода, соответствующий сокращению целевой мышцы или группы мышц пользователя, и блок управления для управления исполнительным механизмом, выполненный с возможностью управления этим механизмом таким образом, что обеспечена возможность оказания указанными средствами взаимодействия противодействующего воздействия на пользователя на первом участке хода и оказания поддерживающего воздействия на пользователя на втором участке хода с созданием усилия, достаточного для прохождения средствами взаимодействия с пользователем по меньшей мере части второго участка хода без приложения усилия пользователем к указанным средствам взаимодействия. В предложенном силовом тренажере, в частности благодаря указанному усилию, достаточному для прохождения средствами взаимодействия с пользователем по меньшей мере части второго участка хода без приложения усилия пользователем, обеспечен технический результат в виде исключения нагрузки по меньшей мере в части концентрической фазы упражнения.
В одном из вариантов исполнения настоящего изобретения блок управления выполнен с возможностью управления ускорением средств взаимодействия с пользователем по меньшей мере на части хода средств взаимодействия с пользователем и/или длиной хода средств взаимодействия с пользователем. Управлением указанным ускорением по меньшей мере на части хода и длиной хода обеспечивается возможность задания такого хода средств воздействия, который позволяет воздействовать на конкретную (целевую) мышцу или группу мышц, что увеличивает эффективность тренировки и делает возможным применение такого тренажера для реабилитации и восстановления работы мышц после травм.
В одном из вариантов исполнения настоящего изобретения средства взаимодействия с пользователем оснащены тензометрическим датчиком, выполненным с возможностью передачи сигнала на блок управления. Использование тензометрических датчиков, выполненных с возможностью передачи сигнала блоку управления, позволяет записывать и использовать для расчетов значения усилия, прикладываемого пользователем.
В одном из вариантов исполнения силового тренажера блок управления выполнен с возможностью управления средствами взаимодействия с пользователем на основании сигнала с тензометрического датчика.
В одном из вариантов исполнения силового тренажера возможность оказания указанного поддерживающего воздействия на пользователя на втором участке хода обеспечена, по меньшей мере, за счет того, что блок управления выполнен с возможностью учета массы части тела пользователя и/или силы тяжести, действующей на эту часть тела. Подобное решение позволяет увеличить эффективность тренировок.
В одном из вариантов исполнения силового тренажера блок управления выполнен с возможностью определения массы части тела пользователя и/или силы тяжести, действующей на эту часть тела, на основании сигнала с тензометрического датчика в положении пользователя при использовании силового тренажера, когда пользователь не оказывает создаваемого мышцами усилия соответствующей частью тела на средства взаимодействия с пользователем при взаимодействии с ними, и с возможностью определения величины указанного поддерживающего воздействия на пользователя на втором участке хода на основании определенной массы и/или силы тяжести. Подобное решение позволяет увеличить эффективность тренировок.
В одном из вариантов исполнения силового тренажера блок управления выполнен с возможностью определения указанной величины поддерживающего воздействия на пользователя на втором участке хода также на основании фазы хода и/или направления хода средств взаимодействия с пользователем. Подобное решение позволяет увеличить эффективность тренировок.
В одном из вариантов исполнения силового тренажера средства взаимодействия с пользователем содержат два элемента для взаимодействия с конечностями пользователя, на каждом из которых расположено по одному тензометрическому датчику, выполненному с возможностью передачи сигнала на блок управления.
В одном из вариантов исполнения силового тренажера два элемента для взаимодействия с пользователем выполнены с возможностью приведения их в движение посредством двух независимых тяг. Такое решение позволяет замерять усилие сопротивления каждой из конечностей пользователя и на основании результатов этих измерений обеспечивать синхронное перемещение элементов взаимодействия с конечностями пользователя.
В одном из вариантов исполнения силового тренажера противодействующее воздействие задано в соответствии с массой части тела пользователя и/или силой тяжести, действующей на эту часть тела. Подобное решение позволяет увеличить эффективность тренировок.
Поставленная задача также решена созданием способа силовых тренировок, согласно которому оказывают средствами взаимодействия с пользователем силового тренажера на пользователя противодействующее воздействие на участке хода указанных средств взаимодействия, соответствующем растяжению целевой мышцы или группы мышц пользователя, и оказывают средствами взаимодействия с пользователем силового тренажера на пользователя поддерживающее воздействие на участке хода указанных средств взаимодействия, соответствующем сокращению целевой мышцы или группы мышц пользователя, с созданием усилия, достаточного для прохождения средствами взаимодействия с пользователем по меньшей мере части этого участка хода без приложения усилия пользователем к указанным средствам взаимодействия.
Краткое описание чертежей
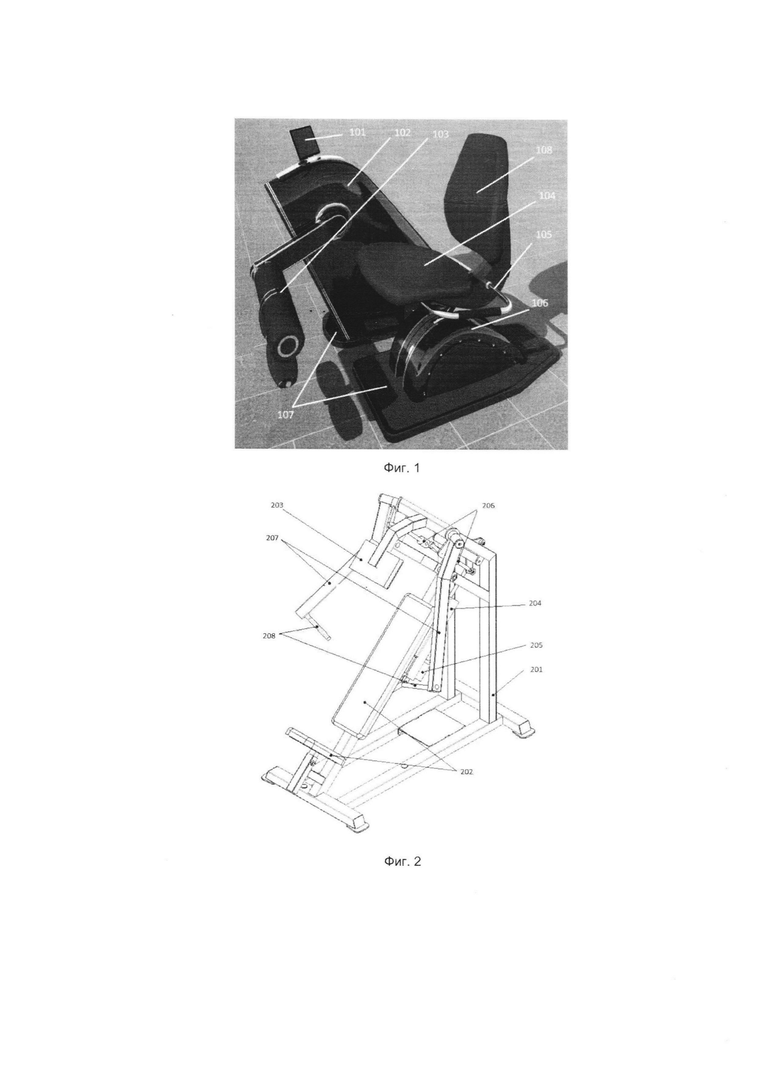
На фиг. 1 показан один из вариантов исполнения силового тренажера для тренировки передней и задней поверхности бедра.
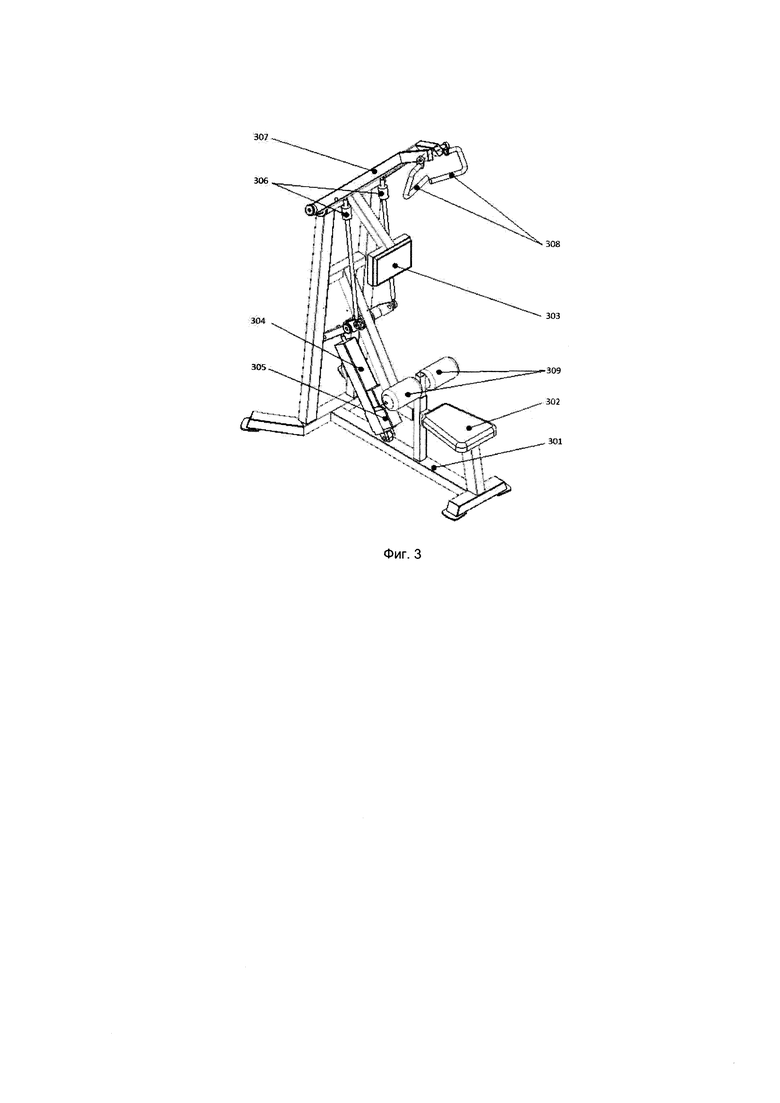
На фиг. 2 показан один из вариантов исполнения силового тренажера для тренировки мышц груди в изометрической проекции.
На фиг. 3 показан один из вариантов исполнения силового тренажера для тренировки мышц спины в изометрической проекции.
Осуществление изобретения
Согласно одному из вариантов исполнения, представленному на фиг. 1, силовой тренажер для тренировки передней и задней поверхности бедра содержит раму, скрытую набором пластмассовых кожухов. Основание тренажера представляет собой Н-образную платформу 107, которая является частью рамы и на одной стороне которой установлено сиденье 104 для пользователя, которое выполнено таким образом, что пользователь может регулировать его высоту и наклон относительно платформы 107 посредствам регулирующих приводов, расположенных под кожухом 106. У основания сиденья установлены две дугообразные рукоятки 105 для каждой руки пользователя, которые выполнены из металлических труб и в средней части которых расположена мягкая нескользящая накладка. Сиденье 104 покрыто слоем прорезиненного водоотталкивающего материала и имеет спинку 108, покрытую тем же материалом. На другой стороне платформы расположена П-образная часть 102 рамы, которая скрыта пластмассовым кожухом, под которым установлены блок управления и исполнительный механизм, передающий на средства 103 взаимодействия с пользователем усилие посредством кривошипного механизма. Исполнительный механизм представляет собой электроцилиндр Festo серии ESBF, шток которого передает усилие кривошипному механизму, на оси вращения которого в свою очередь закреплены средства 103 взаимодействия с пользователем. Средства 103 взаимодействия с пользователем представляют собой эксцентрик, один из концов которого закреплен на оси кривошипного механизма, а на другом конце которого закреплены два валика. Валики расположены с зазором в горизонтальном и вертикальном направлениях по отношению друг к другу, а их длина и расстояние между ними позволяют зафиксировать обе ноги пользователя между ними. Валики расположены на оси, параллельной оси вращения кривошипного механизма. Расстояние между осью кривошипного механизма и осью расположения валиков, соответствующее длине голени пользователя, может быть отрегулировано известными способами. На оси между штоком электроцилиндра и рычагом кривошипного механизма закреплен тензометрический датчик, определяющий усилие, прикладываемое пользователем к эксцентрику. Указанное усилие складывается из усилия, создаваемого мышцами пользователя, и усилия, определяемого массой части тела пользователя, взаимодействующей со средствами 103, например массой ног. Тензометрический датчик соединен с блоком управления и выполнен с возможностью передачи на него сигнала, соответствующего величине усилия, прикладываемого пользователем к эксцентрику. Сигнал от тензометрического датчика может записываться блоком управления с целью мониторинга усилия, прикладываемого пользователем к эксцентрику. Блок управления представляет собой вычислительную систему, выполненную с возможностью управления регулирующими приводами и исполнительным механизмом и с возможностью вывода информации на сенсорный монитор 101, расположенный сверху П-образной части рамы над пластмассовым кожухом 102.
В одном из вариантов исполнения изобретения пользователь занимает место на сиденье 104, фиксирует ноги между валиками, расположенными на средствах 103 взаимодействия с пользователем в виде эксцентрика, и настраивает параметры тренажера под себя, используя сенсорный монитор 101. В эти параметры могут входить: наклон сиденья, высота сиденья, наклон спинки сиденья, длина голени и т.д. Также одним из этих параметров является масса ног пользователя, измеряемая с помощью тензометрического датчика в положении, когда при использовании тренажера пользователь не оказывает создаваемого мышцами усилия на средства 103 взаимодействия с пользователем, а усилие воздействия на эти средства равно силе притяжения ног к земле (силе тяжести, действующей на ноги). При этом пользователь дополнительно оказывает на средства 103 взаимодействия с пользователем усилие, которое определяется массой соответствующей части тела. Также следует отметить, что величина такого усилия может варьироваться от величины силы тяжести, действующей на соответствующую часть тела и определяемой указанной массой, до доли величины этой силы тяжести, меньшей единицы, в зависимости от фазы хода средства 103 взаимодействия с пользователем и вида тренажера. В зависимости от вида тренажера может измеряться масса различных частей тела пользователя. В некоторых вариантах реализации совместно с массой части тела или в дополнение к ней может быть измерена сила тяжести, действующая на эту часть тела. Параметры могут быть записаны в запоминающее устройство блока управления для последующих тренировок в виде, например, профиля конкретного пользователя, чтобы пользователь имел возможность выбрать необходимый набор индивидуальных параметров, записанный в запоминающем устройстве. После идентификации пользователя с загрузкой сохраненного профиля пользователя или подстройки параметров пользователь может выбрать план тренировок в зависимости от одной из целей: повышение силы мышц в концентрической фазе, повышение силы мышц в эксцентрической фазе, повышение силы мышц в смешанном режиме, разминка и т.п. Также предусмотрена возможность настройки концентрической и эксцентрической фазы независимо, в частности ускорение на протяжении всего хода средств 103 взаимодействия или его части может быть настроено пользователем или предустановлено в соответствии с выбранным планом тренировок. Настройка включает в себя, в частности, отключение нагрузки на пользователя в любой фазе, а также в любой части хода средств 103 взаимодействия с пользователем. Все вышеперечисленные действия производятся посредством использования сенсорного монитора 101. После выбора режимов тренировки и настройки упражнений, например для тренировки передней поверхности бедра в эксцентрической фазе, пользователь будет предупрежден о передвижении средств 103 взаимодействия с пользователем в начальное положение - ноги разогнуты в коленях. Когда средства 103 взаимодействия передвинуты в начальное положение, начинается выполнение упражнений. В данном режиме тренировки пользователь будет испытывать давление на переднюю часть голени разогнутой ноги. Задача пользователя сопротивляться этому давлению на всем участке хода средств 103 взаимодействия от положения, в котором ноги полностью разогнуты, до положения, в котором ноги согнуты в коленях. После прохождения этого участка тренажер вернет ноги пользователя в исходное положение без помощи самого пользователя. При этом, если система обнаружит сопротивление со стороны пользователя, на экране отобразится уведомление о необходимости прекратить физическую активность. Обнаружение сопротивления со стороны пользователя в таком варианте исполнения тренажера реализуется путем анализа блоком управления сигнала с тензометрического датчика с учетом измеренной массы ног пользователя. Например, при движении средств 103 взаимодействия из положения, в котором ноги согнуты в коленях, влияние массы ног пользователя возрастает с увеличением угла поворота эксцентрика в направлении положения, в котором ноги разогнуты в коленях. Таким образом блок управления рассчитывает значение влияния массы ног в зависимости от известного угла поворота эксцентрика и учитывает это значение при определении сопротивления со стороны пользователя.
В одном из вариантов реализации изобретения блок управления вычитает значение усилия, определяемого измеренной массой ног пользователя, с поправкой на угол поворота эксцентрика из определенного значения усилия воздействия пользователя на средства 103 взаимодействия с пользователем в соответствующей фазе хода этих средств. Если полученное значение больше заданного порога, блок управления определяет наличие сопротивления пользователя и выдает на сенсорный монитор соответствующее уведомление. Порог может быть установлен в долях силы тяжести, действующей на ноги, например 0,05 силы тяжести. Может быть использовано любое подходящее значение порога. В одном из вариантов реализации порог может быть равен нулю.
Еще в одном варианте реализации блок управления может определять отношение определенного значения усилия воздействия пользователя на средства 103 взаимодействия с пользователем в соответствующей фазе хода этих средств к усилию, определяемому измеренной массой ног пользователя, с поправкой на угол поворота эксцентрика. Если полученное значение больше заданного порога, блок управления определяет наличие сопротивления пользователя и выдает на сенсорный монитор соответствующее уведомление. Порог может быть установлен в виде численного значения, например 1,05. Может быть использовано любое подходящее значение порога. В одном из вариантов реализации порог может быть равен 1.
В одном из вариантов реализации исполнительный механизм может представлять собой мотор-редуктор, выполненный с возможностью передачи усилия на средства взаимодействия с пользователем посредством ременной передачи. Также в данном варианте реализации мотор-редуктор может иметь датчик угла поворота выходной оси.
В некоторых вариантах реализации вместо определения массы измеряют силу тяжести. Соответственно, блок управления вместо определения значение усилия, определяемого измеренной массой ног пользователя, с поправкой на угол поворота эксцентрика определяет значение усилия, определяемого измеренной силы тяжести, действующей на ноги пользователя, с поправкой на угол поворота эксцентрика. Дальнейшие действия выполняют аналогично вышеописанным вариантам реализации.
Также контроль сигнала тензометрического датчика позволяет определять усилие, прикладываемое пользователем на участке хода средств 103 взаимодействия с пользователем, где усилие со стороны пользователя должно быть приложено, и записывать в блоке управления значения этих усилий с целью мониторинга усилий, прикладываемых пользователем.
Согласно еще одному варианту исполнения, представленному на фиг. 2, силовой тренажер для тренировки мышц груди содержит раму 201, на которой закреплены сиденье 202 для пользователя, сенсорный монитор 203, связанный с блоком 205 управления, предназначенным для управления режимами тренировки и мониторинга параметров тренировки, исполнительный механизм 204, управляемый блоком 205 управления, средства взаимодействия с пользователем, включающие два элемента для взаимодействия с пользователем в виде изогнутых рычагов 207 с закрепленными на них рукоятками 208 для пользователя и тензометрическими датчиками 206. В данном варианте исполнения на каждом рычаге 207 установлено по одному тензометрическому датчику 206. Каждый тензометрический датчик независимо определяет усилие, прикладываемое пользователем к соответствующему рычагу, и передает сигнал на блок управления. Например, блок управления получает информацию об ослаблении усилия, прикладываемого пользователем к одному из рычагов, и вырабатывает сигнал для пользователя, отображаемый на сенсорном мониторе 203, о недостаточности усилия, прикладываемого пользователем. В другом варианте исполнения блок управления получает информацию о избыточности усилия, прикладываемого пользователем к одному из рычагов, и вырабатывает сигнал для пользователя, отображаемый на сенсорном мониторе 203, о избыточности усилия, прикладываемого пользователем. Независимое определение усилия, прикладываемого к каждому рычагу пользователем, повышает точность реакции тренажера на действия пользователя, а следовательно, эффективность и безопасность взаимодействия пользователя с тренажером. Следует отметить, что в зависимости от приложения направление изменения противодействующего воздействия (усиление или ослабление) в зависимости от направления изменения усилия, прикладываемого пользователем (усиление или ослабление), может быть различным и реализуется аналогично вышеописанному примеру. Более того, аналогичным образом может быть реализовано управление изменением поддерживающего воздействия в зависимости от измеренного усилия, прикладываемого пользователем.
Также сигналы от тензометрических датчиков могут записываться блоком управления с целью мониторинга усилия, прикладываемого пользователем.
Согласно еще одному варианту исполнения, представленному на фиг. 3, силовой тренажер для тренировки мышц спины содержит раму 301, на которой закреплены сиденье 302 для пользователя, сенсорный монитор 303, связанный с блоком 305 управления, предназначенным для управления режимами тренировки и мониторинга параметров тренировки, исполнительный механизм 304, управляемый блоком 305 управления, средства взаимодействия с пользователем, включающие два элемента для взаимодействия с пользователем в виде двух рычагов 307 с закрепленными на них рукоятками 308 для пользователя и тензометрическими датчиками 306, и валики 309.
В одном из вариантов исполнения пользователь силового тренажера имеет возможность настраивать блок управления исполнительным механизмом таким образом, чтобы выполнялись неполные повторения упражнения, т.е. средства взаимодействия проходили неполный ход. Подобные повторения можно добавить в конце тренировки, тем самым реализуя так называемые «форсированные» повторения. Еще одним вариантом использования неполного хода средств взаимодействия является возможность воздействия на конкретные мышцы или части мышц пользователя. Например, выполняя упражнения в 10-12 сантиметров хода средств взаимодействия на тренажере, представленном на фиг. 1, можно воздействовать только на сухожилия передней поверхности бедра. Таким образом тренажер можно настроить на работу с конкретной мышцей или группой мышц для работы над поврежденными конечностями.
В одном из вариантов исполнения пользователь может устанавливать ускорение средств взаимодействия различным образом в зависимости от участка хода средств взаимодействия. Например, установить 10% от максимального ускорения на первой 1/5, 30% на последней 1/5 и 100% в середине хода средств взаимодействия. Таким образом, пользователь может ослабить нагрузку на сухожилия в начале и в конце упражнения.
Хотя в настоящем описании представлены некоторые предпочтительные варианты реализации изобретения, они не являются ограничивающими и приведены в качестве примеров. Объем настоящего изобретения не ограничен приведенными примерами и определяется исключительно нижеследующей формулой изобретения.
Изобретение относится к тренировочным устройствам, а именно к силовым тренажерам, и направлено на повышение эффективности силовых тренировок. Силовой тренажер содержит раму, на которой установлены исполнительный механизм и блок управления. С подвижной частью исполнительного механизма связаны средства взаимодействия с пользователем, выполненные с возможностью приема усилия от исполнительного механизма и имеющие первый участок хода, соответствующий растяжению целевой мышцы или группы мышц пользователя, и второй участок хода, соответствующий сокращению целевой мышцы или группы мышц пользователя. Блок управления предназначен для управления исполнительным механизмом, выполненный с возможностью управления этим механизмом таким образом, что обеспечена возможность оказания указанными средствами взаимодействия противодействующего воздействия на пользователя на первом участке хода и оказания поддерживающего воздействия на пользователя на втором участке хода с созданием усилия, достаточного для прохождения средствами взаимодействия с пользователем по меньшей мере части второго участка хода без приложения пользователем создаваемого мышцами усилия к указанным средствам взаимодействия. 2 н. и 18 з.п. ф-лы, 3 ил.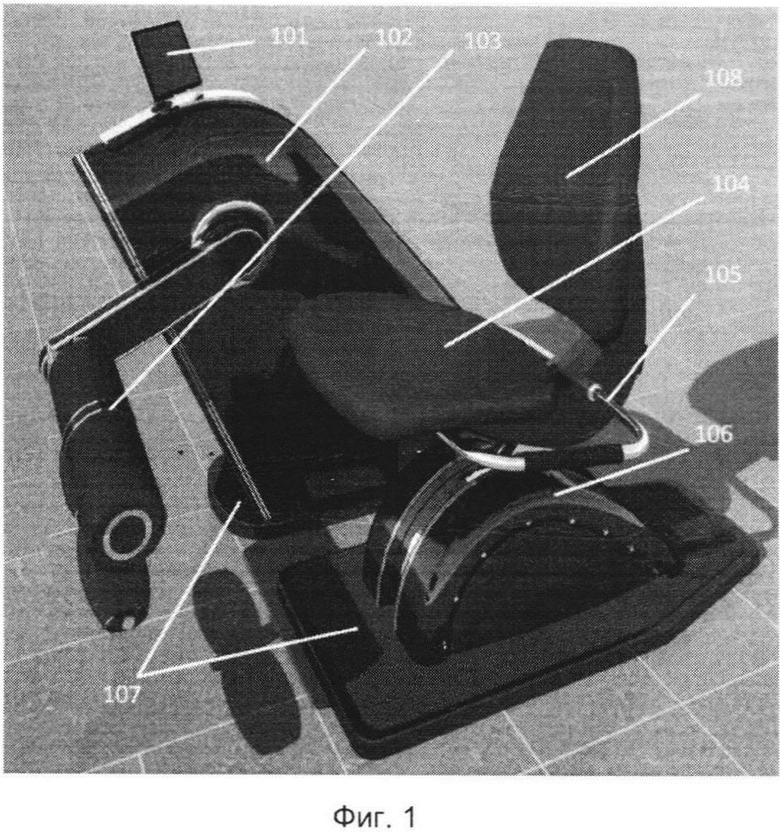
1. Силовой тренажер, содержащий:
раму, на которой установлены
- исполнительный механизм, с подвижной частью которого связаны средства взаимодействия с пользователем, выполненные с возможностью приема усилия от исполнительного механизма и имеющие первый участок хода, соответствующий растяжению целевой мышцы или группы мышц пользователя, и второй участок хода, соответствующий сокращению целевой мышцы или группы мышц пользователя;
- блок управления для управления исполнительным механизмом, выполненный с возможностью управления этим механизмом таким образом, что обеспечена возможность оказания указанными средствами взаимодействия противодействующего воздействия на пользователя на первом участке хода и оказания поддерживающего воздействия на пользователя на втором участке хода с созданием усилия, достаточного для прохождения средствами взаимодействия с пользователем по меньшей мере части второго участка хода без приложения пользователем создаваемого мышцами усилия к указанным средствам взаимодействия.
2. Силовой тренажер по п. 1, в котором блок управления выполнен с возможностью управления ускорением средств взаимодействия с пользователем по меньшей мере на части хода средств взаимодействия с пользователем и/или длиной хода средств взаимодействия с пользователем.
3. Силовой тренажер по п. 1, в котором средства взаимодействия с пользователем оснащены тензометрическим датчиком, выполненным с возможностью передачи сигнала на блок управления.
4. Силовой тренажер по п. 3, в котором блок управления выполнен с возможностью управления средствами взаимодействия с пользователем на основании сигнала с тензометрического датчика.
5. Силовой тренажер по п. 3 или 4, в котором возможность оказания указанного поддерживающего воздействия на пользователя на втором участке хода обеспечена, по меньшей мере, за счет того, что блок управления выполнен с возможностью учета массы части тела пользователя и/или силы тяжести, действующей на эту часть тела.
6. Силовой тренажер по п. 5, в котором блок управления выполнен с возможностью определения массы части тела пользователя и/или силы тяжести, действующей на эту часть тела, на основании сигнала с тензометрического датчика в положении пользователя при использовании силового тренажера, когда пользователь не оказывает создаваемого мышцами усилия соответствующей частью тела на средства взаимодействия с пользователем при взаимодействии с ними, и с возможностью определения величины указанного поддерживающего воздействия на пользователя на втором участке хода на основании определенной массы и/или силы тяжести.
7. Силовой тренажер по п. 6, в котором блок управления выполнен с возможностью определения указанной величины поддерживающего воздействия на пользователя на втором участке хода также на основании фазы хода и/или направления хода средств взаимодействия с пользователем.
8. Силовой тренажер по п. 1, в котором средства взаимодействия с пользователем содержат два элемента для взаимодействия с конечностями пользователя, на каждом из которых расположено по одному тензометрическому датчику, выполненному с возможностью передачи сигнала на блок управления.
9. Силовой тренажер по п. 8, в котором два элемента для взаимодействия с пользователем выполнены с возможностью приведения их в движение посредством двух независимых тяг.
10. Силовой тренажер по п. 6, в котором противодействующее воздействие задано в соответствии с массой части тела пользователя и/или силой тяжести, действующей на эту часть тела.
11. Способ выполнения силовых тренировок, согласно которому
оказывают средствами взаимодействия с пользователем силового тренажера на пользователя противодействующее воздействие на участке хода указанных средств взаимодействия, соответствующем растяжению целевой мышцы или группы мышц пользователя,
и оказывают средствами взаимодействия с пользователем силового тренажера на пользователя поддерживающее воздействие на участке хода указанных средств взаимодействия, соответствующем сокращению целевой мышцы или группы мышц пользователя, с созданием усилия, достаточного для прохождения средствами взаимодействия с пользователем по меньшей мере части этого участка хода без приложения пользователем создаваемого мышцами усилия к указанным средствам взаимодействия.
12. Способ по п. 11, согласно которому измеряют усилие, прикладываемое пользователем к средствам взаимодействия с пользователем.
13. Способ по п. 12, согласно которому управляют средствами взаимодействия с пользователем на основании измеренного усилия.
14. Способ по 11, согласно которому оказывают указанное поддерживающее воздействие на пользователя с учетом массы части тела пользователя и/или силы тяжести, действующей на эту часть тела.
15. Способ по п. 11 или 12, согласно которому определяют массу части тела пользователя и/или силу тяжести, действующую на эту часть тела, в положении пользователя при использовании силового тренажера, когда пользователь не оказывает создаваемого мышцами усилия соответствующей частью тела на средства взаимодействия с пользователем при взаимодействии с ними, и определяют величину указанного поддерживающего воздействия на основании определенной массы части тела пользователя и/или силы тяжести, действующей на эту часть тела.
16. Способ по п. 15, согласно которому определяют указанную величину поддерживающего воздействия на пользователя также на основании фазы хода и/или направления хода средств взаимодействия с пользователем.
17. Способ по п. 11, согласно которому при оказании воздействия на пользователя управляют ускорением средств взаимодействия с пользователем по меньшей мере на части хода средств взаимодействия с пользователем и/или длиной хода средств взаимодействия с пользователем.
18. Способ по п. 12, согласно которому управляют воздействием на пользователя на основании измеренного усилия, прикладываемого пользователем к указанным средствам взаимодействия.
19. Способ по п. 18, согласно которому независимо измеряют усилие, прикладываемое пользователем к указанным средствам взаимодействия каждой конечностью.
20. Способ по п. 18 или 19, согласно которому управляют воздействием на пользователя с учетом массы части тела пользователя и/или силы тяжести, действующей на эту часть тела.
| US 5476428 A, 19.12.1995 | |||
| US 4865315 A, 12.09.1989 | |||
| US 5254066 A, 19.10.1993 | |||
| US 20150148203 A1, 28.03.2015 | |||
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ СИЛОВОГО КАБЕЛЯ К НАСОСНО-КОМПРЕССОРНЫМ ТРУБАМ | 2003 |
|
RU2263759C2 |
| КОМБИНИРОВАННЫЙ КОМНАТНЫЙ ТРЕНАЖЕР | 1992 |
|
RU2050881C1 |

