Область техники
Настоящее изобретение относится, в общем, к области тренажеров для выполнения силовых физических упражнений, для занятий спортом, а также для медицинских целей и, в частности, относится к тренажеру для выполнения пользователем силовых физических упражнений.
Изобретение также относится к комплекту для модификации и способу для получения такого тренажера исходя из существующего тренажера для выполнения силовых физических упражнений.
Изобретение также относится к способу и программному продукту для управления тренажером.
Предпосылки к созданию изобретения
Известные тренажеры для выполнения пользователем силовых физических упражнений, просто для занятий спортом или для медицинских целей, обычно содержат качающийся рычаг, перемещаемый пользователем для выполнения работы, и нагрузку, соединенную с качающимся рычагом, предназначенную для оказания противодействия работе, выполняемой пользователем. Качающийся рычаг перемещается пользователем вдоль определенных маршрутов, определяемых тренажером.
Нагрузка, противодействие которой преодолевает пользователь при выполнении работы, является фиксированной и обычно предварительно устанавливается пользователем перед тем, как приступить к выполнению физического упражнения. Это влечет за собой потребность в тренере, который следил бы за выполнением физического упражнения, чтобы удостовериться, насколько правильно и эффективно оно выполняется, и предполагает высокую степень опасности возникновения телесных повреждений, таких как деформация, растяжение мышц и т.п., вследствие чрезмерных нагрузок.
Из патента Японии JP 2185272 известен тренажер для реабилитации пользователя после телесного повреждения. Этот известный тренажер имеет устройство для блокировки нагрузки в случае превышения пользователем порога безопасности нагрузки.
Из международной заявки на патент WO 2009107904 известен тренажер для выполнения силовых физических упражнений пользователем, который позволяет выставлять на дисплее несколько тренировочных программ только изокинетического или изотонического типа.
Из европейского патента EP 1252915B1 известно устройство для выполнения силовых физических упражнений пользователем, содержащее устройство, увеличивающее или уменьшающее нагрузку даже во время выполнения физического упражнения. В частности, в распоряжении пользователя имеется пульт управления, имеющий ряд органов управления, которые пользователь приводит в действие руками или ногами по своему усмотрению, чтобы увеличить или уменьшить поднимаемый вес.
Этот известный тренажер рассчитан на тренированных пользователей или, во всяком случае, на участие тренера, потому что изменение величины поднимаемого груза зависит от желания пользователя. По этой же причине этот известный тренажер не исключает нанесения пользователю телесных повреждений.
Краткое изложение сущности изобретения
Основной целью настоящего изобретения является устранение, по меньшей мере частичное, вышеуказанных недостатков, путем создания тренажера для выполнения пользователем силовых физических упражнений, простого в изготовлении и относительно дешевого.
Другой целью изобретения является создание тренажера для выполнения пользователем силовых физических упражнений, который может использоваться каждым человеком даже без помощи со стороны тренера.
Следующей целью изобретения является создание тренажера для выполнения пользователем силовых физических упражнений, который сводит к минимуму или полностью исключает опасность получения пользователями телесных повреждений.
Эти и другие цели, как следует из приведенного ниже текста описания изобретения, достигаются путем использования тренажера для выполнения пользователем силовых физических упражнений, обладающего одной или более особенностями, раскрытыми в данном описании изобретения и/или в формуле изобретения.
Тренажер, по существу, может содержать качающийся рычаг, перемещаемый пользователем для выполнения работы, и нагрузку, соединенную с качающимся рычагом, оказывающую противодействие работе пользователя. Другими словами, пользователь, воздействующий на качающийся рычаг, в определенное время выполняет работу против действия усилия нагрузки.
Выражение “качающийся рычаг” и его производные в используемом в данном описании изобретения значении служит для обозначения элемента или узла из элементов в сборе, соединенных друг с другом, с которым пользователь взаимодействует непосредственно или косвенно для выполнения мышечной работы.
Выражение “нагрузка” или его производные в значении, используемом в данном описании изобретения, служат для обозначения элемента или узла из элементов в сборе, соединенных друг с другом, пригодного для создания усилия, преодолеваемого пользователем при выполнении работы.
Выражение “работа пользователя” или его производные в значении, используемом в данном описании изобретения, служат для обозначения работы по перемещению качающегося рычага, выполняемой пользователем в единицу времени против действия усилия нагрузки. Другими словами, работа пользователя определяет силу, с которой пользователь противодействует усилию нагрузки.
Качающийся рычаг и/или нагрузка могут быть или установлены, или не установлены на несущей нагрузку опорной конструкции.
Тренажер может быть спроектирован так, чтобы он осуществлял текущий контроль работы пользователя и автоматически корректировал противодействующую нагрузку в соответствии с выявленной работой.
В частности, тренажер согласно изобретению предназначен для реагирования на выявленное увеличение работы автоматическим увеличением нагрузки и наоборот.
С этой целью тренажер содержит устройство для выявления в определенные интервалы времени, которые могут иметь любой размер по меньшей мере одного первого значения по меньшей мере одного параметра, соответствующего мышечной работе, выполняемой пользователем против действия усилия нагрузки.
Выявляемым параметром может быть, например, скорость или ускорение, с которым выполняется физическое упражнение, или же сила, прикладываемая пользователем для выполнения физического упражнения.
С другой стороны, текущий контроль работы пользователя может осуществляться путем управления физическими параметрами, например, частотой сердечных сокращений или частотой сокращения - расслабления мышц.
Очевидно, что измерительный преобразователь может иметь разные формы исполнения, зависящие от выявляемого параметра.
Возможно выявление ряда параметров, одновременно или нет, например силы и скорости.
Тренажер также может содержать по меньшей мере один логический блок управления, настраиваемый по меньшей мере на одно второе значение по меньшей мере одного параметра, соответствующего рекомендованной пользователю тренировочной работе.
Аналогично упомянутому выше, задаваемым параметром может быть, например, “идеальные” рабочая скорость или ускорение, с которыми выполняется упражнение, или “идеальная” сила, с которой пользователь должен выполнять физическое упражнение, чтобы тренировка осуществлялась наилучшим образом.
Эти значения, изменяющиеся от одного пользователя к другому, могут определяться по существу известным способом по так называемой “кривой сила - скорость”, которая указывает каждому пользователю характеристики работы мышц в функции силы и скорости выполнения физических упражнений в данный момент.
С другой стороны, может быть также задано “идеальное” сердечное сокращение, которое можно получить с помощью электрокардиограммы.
Кроме того, возможно также задание частоты сокращения - расслабления мышц, которая может определяться посредством электромиографии.
Задание может осуществляться вручную, например, при помощи сенсорного дисплея, или автоматически.
Автоматическое задание может быть осуществлена с помощью системной программы, считывающей из блока памяти, который может быть встроен в тренажер, одно или более значений одного или более параметров пользователя, которые могут быть заранее загружены в блок памяти при работе того же самого пользователя в стандартных условиях, и тем самым устанавливающей задание первого логического блока в соответствии с заранее заданным алгоритмом.
Например, тренажер может быть запрограммирован таким образом, что до выполнения физического упражнения или, во всяком случае, с определенной периодичностью, он устанавливает интересующие значения, например значения, соответствующие кривой сила - скорость, или значения частоты сердечных сокращений при работе пользователя в определенных стандартных условиях, подходящих для выявления таких параметров.
Эти данные потом могут быть загружены в память тренажера и могут быть использованы системной программой, которая анализирует и применяет их для определения “идеального” опорного значения или опорных значений, которых пользователь должен придерживаться во время выполнения физического упражнения. Определение этих значений может быть осуществлено с помощью одного или более определенных алгоритмов, периодически выбираемых пользователем, исходя из его потребностей.
Например, возможен выбор программы для развития мышечной массы, вместо другой программы, для развития взрывной силы.
Таким образом, тренажер является полностью автоматическим, а также предельно безопасным для пользователя.
Первый логический блок управления может быть соответствующим образом функционально связан с датчиком для сравнения выявляемой им работы с рекомендованной работой.
Разумеется, нет необходимости в том, чтобы первое выявленное значение было взаимосвязано со вторым заданным значением. Если, например, измерительный преобразователь выполнен с возможностью выявления силы, с которой пользователь выполняет физическое упражнение, например, с помощью датчика механической нагрузки, имеется возможность задания второго значения идеальной скорости работы. В этом случае первый логический блок управления обеспечивает преобразование, посредством значений, соответствующих вышеупомянутой кривой сила - скорость, заданного “идеального” значения скорости в “идеальное” значение силы с тем, чтобы сопоставить друг с другом взаимосвязанные величины.
Тренажер, предпочтительно, может содержать регулирующее устройство, которое может быть функционально связано с первым логическим блоком управления, воздействующее на нагрузку так, что она автоматически увеличивается в случае, если работа, выявленная измерительным преобразователем, больше, чем заданная рекомендованная работа, и автоматически уменьшается в случае, если выявленная работа меньше, чем заданная рекомендованная работа.
Благодаря таким особенностям тренажер совершенно безопасен в эксплуатации для любого пользователя, даже при отсутствии помощи со стороны тренера. Фактически в каждый момент времени мышечная работа пользователя стремится приблизиться к “идеальной” тренировочной мышечной работе.
Пользователю достаточно задать правильную “идеальную” работу, которая может быть предварительно определена так, как упомянуто выше, и начать тренировку. В случае автоматического задания пользователь должен всего лишь следовать инструкции на тренажер, потому что тренажер сам задает “идеальные” параметры, на которые он должен ориентироваться во время выполнения физического упражнения.
В отличие от традиционных тренажеров изотонического или изокинетического типа, тренажер согласно настоящему изобретению самостоятельно приспосабливается к работе пользователя в каждый момент времени.
Эта именно “адаптивная” конфигурация тренажера, более того, сводит к минимуму или полностью исключает опасность возникновения телесных повреждений у тех, кто ею пользуется, и позволяет проводить тренировку предельно эффективно.
Подходящих значений, соответствующих “идеальной работе”, может быть два c тем, чтобы установить “идеальный интервал”, в пределах которого может тренироваться пользователь. В этом случае тренажер автоматически “адаптирует” нагрузку в случае, если пользователь работает за пределами идеального интервала работы, то есть ниже уровня минимальной работы или выше уровня максимальной работы.
Тренажер преимущественно может содержать блок электромагнитной стимуляции мышц человека, который включает в себя по меньшей мере одну катушку индуктивности, размещаемую вблизи по меньшей мере одной мышцы пользователя по меньшей мере один источник питания, подключенный к катушке индуктивности для генерирования по меньшей мере одного электромагнитного поля и генератор импульсного тока, предназначенный для генерирования импульсов тока определенной частоты и длительности, подаваемых к катушке индуктивности, чтобы вызвать непроизвольное сокращение и расслабление мышцы человека, вблизи которой установлена катушка индуктивности.
Первый логический блок управления, предпочтительно, может быть функционально связан с блоком электромагнитной стимуляции так, что он автоматически отключает источник питания в случае, если работа, выявленная при помощи измерительного преобразователя, совпадает со значением по меньшей мере одного параметра, соответствующего опасной заданной работе.
В этом случае тренажер может либо нуждаться в описанном выше регулирующем устройстве, либо не нуждаться в нем.
Предпочтительные, но не являющиеся единственно возможными, примеры осуществления изобретения определяются зависимыми пунктами формулы изобретения.
Краткое описание чертежей
Другие особенности и преимущества изобретения очевидны из приведенного ниже подробного описания нескольких предпочтительных вариантов осуществления тренажера согласно изобретению, которые описаны как примеры, не ограничивающие объем изобретения, с помощью прилагаемых графических материалов, на которых:
Фиг. 1 - представляет собой схематическое изображение первого варианта осуществления тренажера 1;
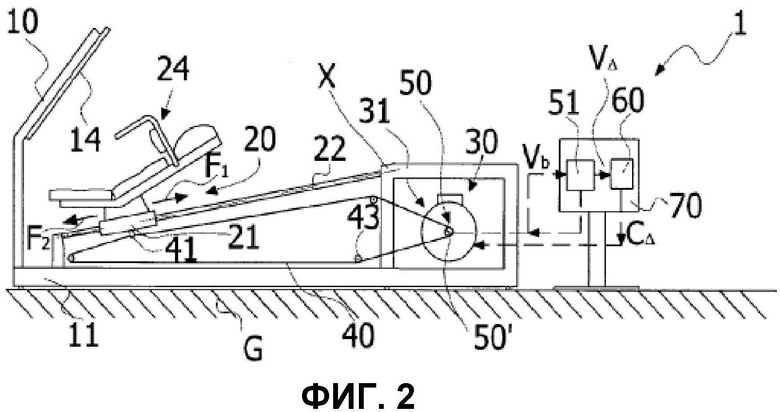
Фиг. 2 - представляет собой схематическое изображение второго варианта осуществления тренажера 1;
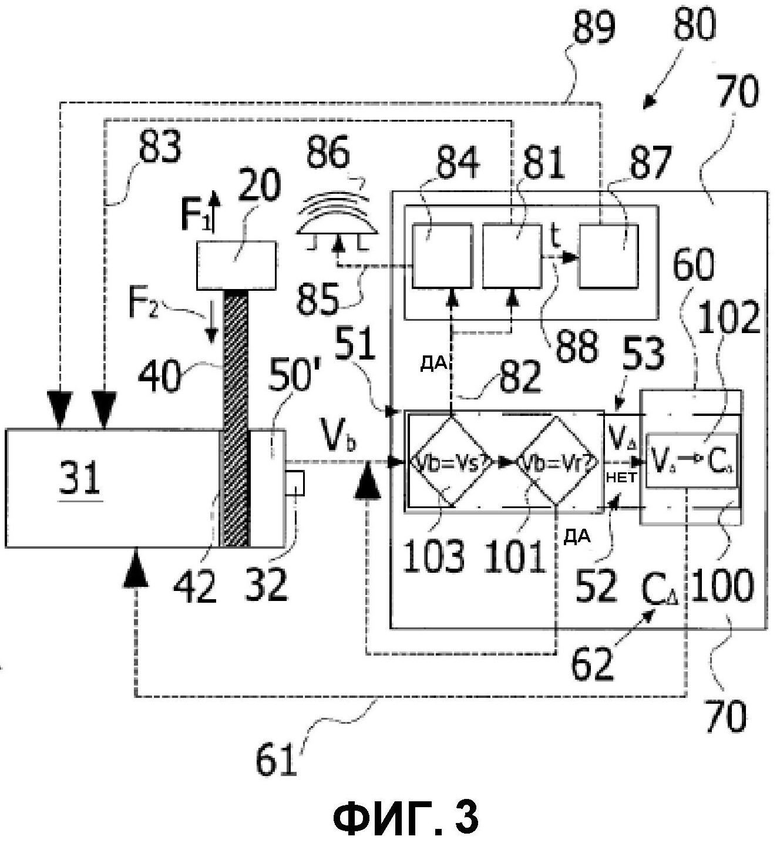
Фиг. 3 - представляет собой схематическое изображение некоторых особенностей тренажера 1, изображенного на фиг. 1 и 2;
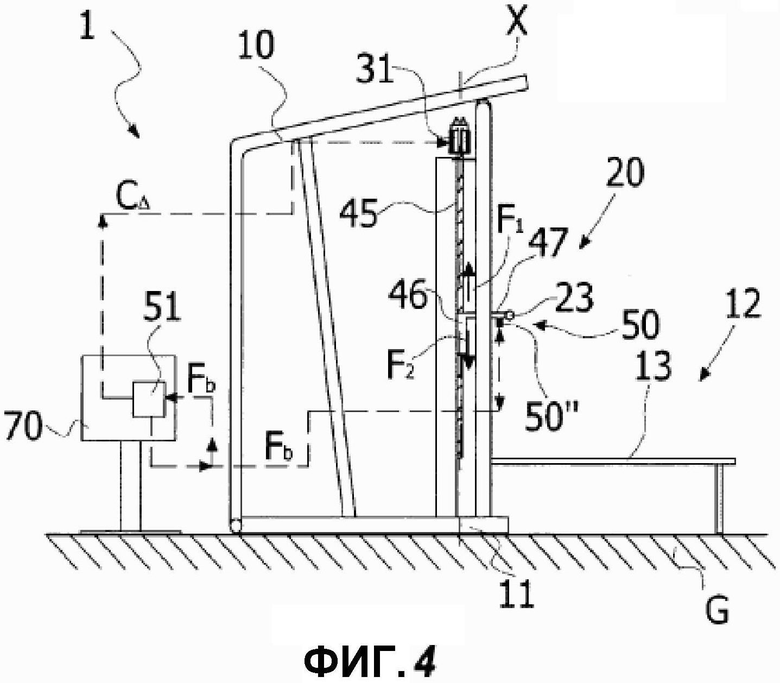
Фиг. 4 - представляет собой схематическое изображение третьего варианта осуществления тренажера 1;
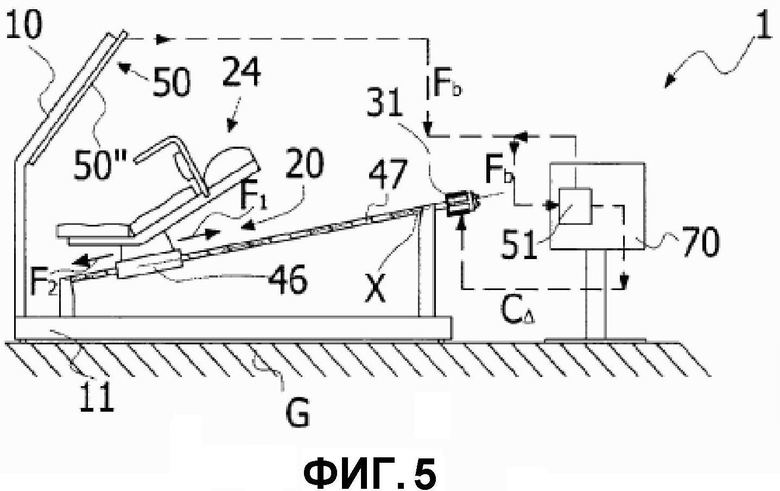
Фиг. 5 - представляет собой схематическое изображение четвертого варианта осуществления тренажера 1;
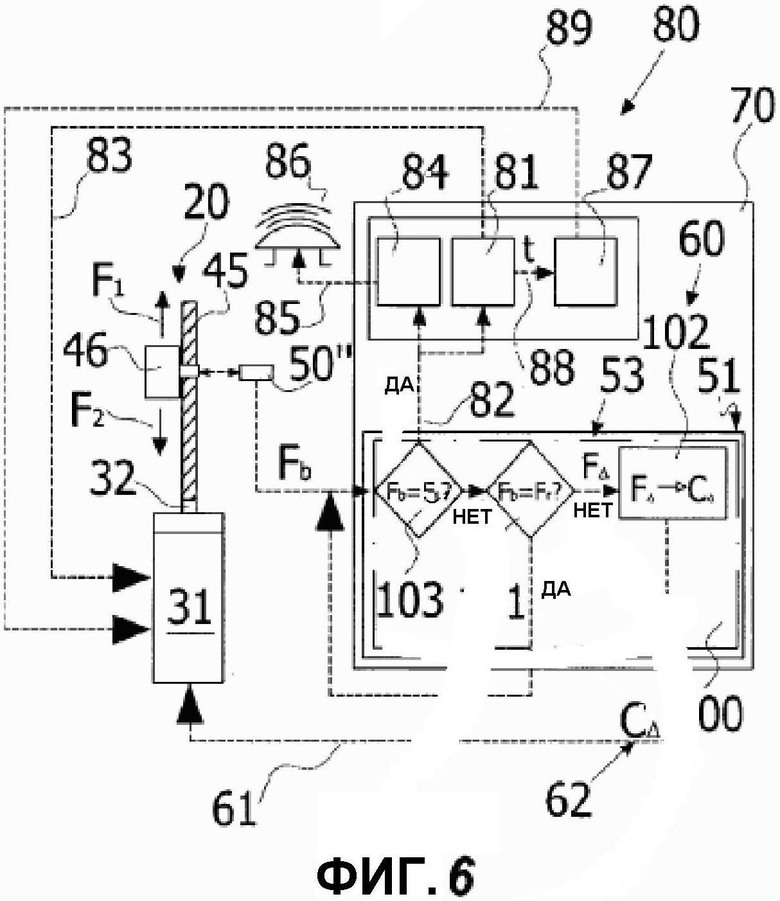
Фиг. 6 - представляет собой схематическое изображение некоторых особенностей тренажера 1, изображенного на фиг. 4 и 5;
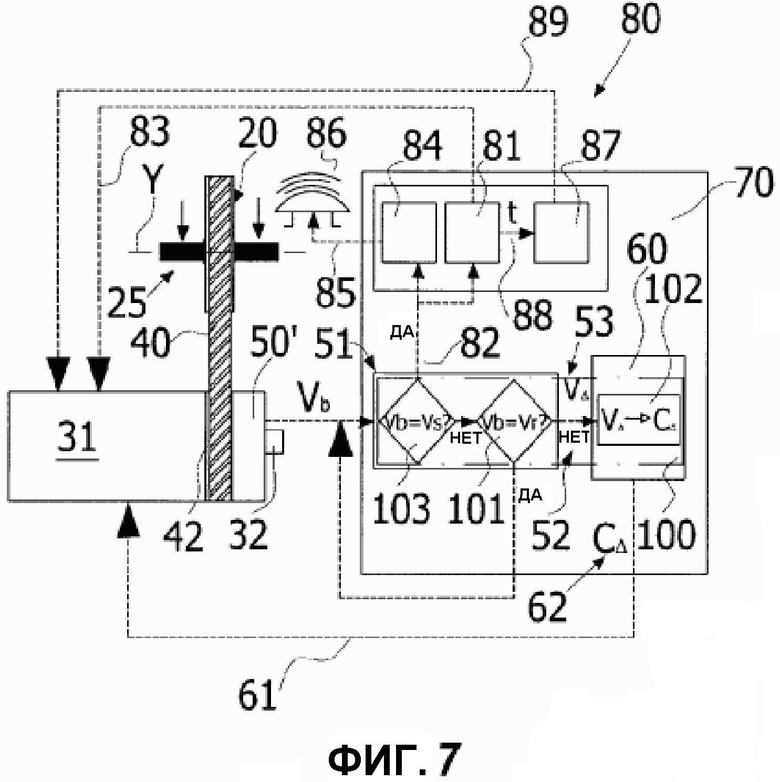
Фиг. 7 - представляет собой схематическое изображение пятого варианта осуществления тренажера 1;
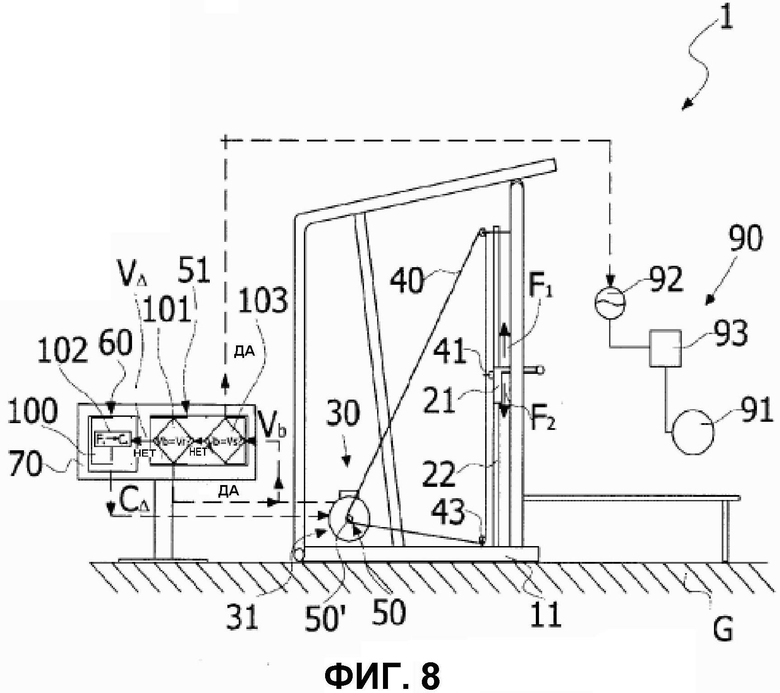
Фиг. 8 - представляет собой схематическое изображение шестого варианта осуществления тренажера 1;
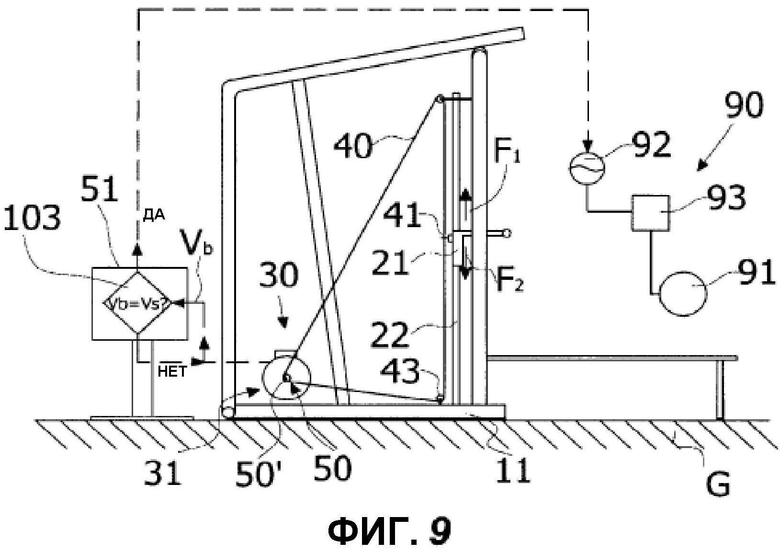
Фиг. 9 - представляет собой схематическое изображение седьмого варианта осуществления тренажера 1.
Подробное описание предпочтительных примеров
осуществления изобретения
Представленный на вышеупомянутых фигурах графических материалов тренажер согласно изобретению, который обозначен общей числовой позицией 1, предназначен, в частности, для выполнения пользователем силового упражнения, для занятий спортом, а также для медицинских целей или для реабилитации.
Фиг. 1, 2, 4, 5, 7, 8 и 9 поясняют семь вариантов осуществления тренажера.
Первый вариант осуществления, изображенный на фиг. 1, предназначен для тренировки мышц верхней части тела пользователя и, в частности, грудных мышц, тогда как второй вариант осуществления, изображенный на фиг. 2, предназначен для тренировки мышц ног пользователя.
Варианты осуществления, изображенные на фиг. 4 и 5, аналогичны изображенным на фиг. 1 и 2, и отличаются от них способом, которым тренажер 1 непрерывно адаптирует нагрузку к работе пользователя.
Пятый вариант осуществления, изображенный на фиг. 7, предназначен для тренировки мышц ног пользователя и концептуально аналогичен классическому “велотренажеру”, который непрерывно адаптирует нагрузку к работе пользователя.
Шестой вариант осуществления, изображенный на фиг. 8, предназначен для тренировки мышц верхней части тела пользователя, в частности грудных мышц, и отличается от варианта осуществления по фиг. 1, поскольку в его состав входит блок 90 для электромагнитной стимуляции мышц человека.
Седьмой вариант осуществления, изображенный на фиг.9, предназначен для тренировки мышц верхней части тела пользователя, в частности грудных мышц, и отличается от варианта осуществления по фиг. 1, поскольку он нуждается в регулирующем устройстве 60.
Если не указано отдельно, особенности, являющиеся общими для вариантов осуществления тренажера, обозначены одной и той же числовой позицией.
Тренажер 1 может содержать опорную конструкцию, в частности несущий каркас 10 с основанием 11, лежащим на полу G, на котором установлен качающийся рычаг 20, перемещаемый пользователем для выполнения работы, соединенный с нагрузкой 30, предназначенной для оказания противодействия работе пользователя.
В поясняемых фигурами чертежей вариантах осуществления перемещение качающегося рычага 20 является направляемым. В частности, последний может содержать ползун 21, установленный с возможностью скольжения вдоль направляющей штанги 22, которая определяет собой ось Х, вдоль которой происходит перемещение качающегося рычага в двух направлениях, указанных стрелками F1 и F2. С другой стороны, качающийся рычаг 20 может быть также свободным при условии, что он соединен с нагрузкой 30, что не выходит за пределы объема изобретения, определяемого формулой изобретения.
В частности, несущий каркас 10 в первом, третьем, шестом и седьмом вариантах осуществления тренажера, изображенных на фиг. 1, 4, 8 и 9, может содержать скамейку 12, расположенную горизонтально или наклонно, на верхней поверхности 13 которой пользователь может лежать, схватив ползун 21 и перемещая его вверх и вниз. Для этой цели качающийся рычаг 20 может содержать, по существу, горизонтальный усик 23, за который хватается пользователь для выполнения физического упражнения, жестко связанный с ползуном 21.
С другой стороны, во втором и четвертом вариантах осуществления тренажера, изображенных на фиг. 2 и 5, качающийся рычаг 20 может содержать сиденье 24, на котором пользователь может сидеть, перемещая ползун 21 вдоль штанги 22. С этой целью несущий каркас 10 может содержать упор 14 для ног, надавливая на который пользователь, сидящий на сиденье 24, может тренироваться.
Кроме того, качающийся рычаг 20 пятого варианта осуществления тренажера, изображенного на фиг. 7, может содержать группу 25 педалей с кривошипами, которые пользователь может выставить с возможностью поворота вокруг оси Y. С этой целью несущий каркас может содержать велотренажер, не показанный на фигуре чертежа, потому что он, по существу, известен, на котором пользователь может сидеть, выполняя тренировочные упражнения.
Тренажер 1 выполнен так, чтобы автоматически приспосабливается к работе пользователя, что почти полностью исключает опасность телесных повреждений во время выполнения физического упражнения.
Для этой цели может быть предусмотрено наличие устройства управления, которое может включать в себя измерительный преобразователь 50, предназначенный для текущего контроля работы пользователя в определенные интервалы времени путем выявления одного или более параметров, прямо или косвенно связанных с этой же работой, и логический блок 51 управления, предназначенный для сравнения выявленного значения с одним или более эталонных тренировочных значений, заданных пользователем вручную, например, с помощью дисплея или автоматически заданных программой.
С этим логическим блоком 51 управления может быть функционально связано регулирующее устройство 60, которое воздействует на нагрузку 30 так, что автоматически регулирует ее в ответ на выявление отклонения выявленного значения от заранее заданных или заранее установленных значения или значений.
Целесообразно проектирование регулирующего устройства 60 таким, чтобы оно автоматически увеличивало нагрузку 30 в случае, если работа, выявленная измерительным преобразователем 50, больше, чем “идеальная” рекомендованная работа, заданная на логическом блоке 51 управления, и автоматически уменьшало нагрузку 30 в случае, если выявленная работа меньше, чем заданная рекомендованная работа.
Таким образом, тренажер непрерывно стремится приблизить мышечную работу пользователя к тренировочной мышечной работе, адаптируясь к работе пользователя в каждый следующий момент времени.
Более того, тренажер сводит к минимуму опасность телесных повреждений пользователя, поскольку, если работа, выявленная измерительным преобразователем 50, меньше, чем рекомендованная работа, тренажер автоматически уменьшает нагрузку.
Соответственно, тренажер 1 может содержать двигательное устройство, обозначенное общей позицией 31, предназначенное для создания крутящего момента, который определяет нагрузку 30.
В первом, втором, пятом, шестом и седьмом вариантах осуществления тренажера, изображенных на фиг. 1, 2, 7, 8 и 9, пользователь, воздействуя на качающийся рычаг 20, выполняет работу непосредственно против действия крутящего момента, создаваемого двигательным устройством 31.
Последнее может быть выполнено в виде бесколлекторного двигателя шагового типа с тем, чтобы создавать крутящий момент также в состоянии отсутствия движения при отсутствии опасности возникновения повреждений или поломок.
Для обеспечения жесткости и целостности при передаче движения между качающимся рычагом 20 и двигательным устройством 31, может быть предусмотрено наличие устройства передачи движения типа замкнутого кольца.
Последнее может быть выполнено в виде кольцеобразного элемента 40 передачи движения, например троса, ремня, ленты или цепи и т.п., соединенных с двигателем 31 посредством зубчатого колеса 42, закрепленного шпонкой к его оси 32, и с качающимся рычагом 20 посредством соединительного устройства 41, например посредством пары зажимов, приваренных к ползуну 21. Также может быть предусмотрено наличие одного или более возвратных натяжных роликов 43.
В первом, втором, пятом, шестом и седьмом вариантах осуществления тренажера, изображенных на фиг. 1, 2, 7, 8, и 9, параметром, текущий контроль которого осуществляется устройством управления для обеспечения автоматического регулирования работы пользователя, может быть скорость и/или ускорение, сообщаемые качающемуся рычагу 20 как результат работы пользователя.
С этой целью измерительный преобразователь 50 может быть функционально связан с качающимся рычагом 20 для управления его перемещением, определяемым работой пользователя против действия усилия нагрузки 30, то есть против действия крутящего момента, создаваемого двигателем 31.
Для этой цели указанный измерительный преобразователь может содержать дешифратор 50΄ или акселерометр, закрепленный шпонкой к оси 32 двигателя 31 для выявления скорости Vb, или ускорения, качающегося рычага в ответ на работу пользователя.
Несмотря на то, что в целях упрощения в данном описании изобретения всегда делается ссылка на дешифратор 50΄ и на текущий контроль скорости качающегося рычага 20, следует понимать, что то же самое справедливо также в отношении автоматического регулирования его ускорения при помощи акселерометра.
Преимущественно, как видно на фиг. 3, в состав устройства управления может также входить первый логический блок 51 управления, функционально связанный с дешифратором 50΄, вручную или автоматически настраиваемый по меньшей мере на одно эталонное значение Vr скорости и действующий так, что сравнивает в определенные интервалы времени значение Vb скорости, выявленное дешифратором 50΄, с эталонным значением Vr и в случае, если два значения не совпадают, генерирует первый сигнал 52 ошибки.
Варианты осуществления, изображенные на фиг. 1, 2, 3, 7 и 8, относятся к управлению, осуществляемому двумя логическими блоками 51, 60, функционально связанными друг с другом. Логические блоки 51, 60 могут взаимодействовать с программным обеспечением, которое может быть представлено одной системной программой 100, предназначенной для взаимодействия с этими блоками 51 и 60. В частности, первый логический блок может взаимодействовать с системной подпрограммой 101 и второй логический блок может взаимодействовать с системной подпрограммой 102. Также точно каждый логический блок 51, 60 может иметь одну системную программу, реализованную на нем.
Очевидно, что в этих вариантах осуществления управление тренажером может осуществляться также при помощи одного логического блока 51, как это имеет место в вариантах осуществления, изображенных на фиг. 4, 5 и 6, что не выходит за пределы объема изобретения, выраженного прилагаемой формулой изобретения.
Первый логический блок 51 может также реагировать на заключенную в первом сигнале 52 ошибки первую информацию 53, касающуюся отклонения V∆ выявленной скорости Vb от эталонной скорости Vr, другими словами, определять, отличается ли скорость, сообщаемая пользователем качающемуся рычагу 20, от идеальной скорости и если да, то насколько она выше или ниже ее.
Регулирующее устройство может содержать второй микропроцессорный логический блок 60, функционально связанный с первым блоком 51 и двигателем 31, срабатывающий от первого сигнала 52 ошибки и реагирующий на него, вырабатывая первую информацию 53, чтобы сформировать второй сигнал 61 ошибки, посылаемый к двигателю 31.
Второй сигнал 61 ошибки может заключать в себе вторую информацию 62, касающуюся отклонения С∆ крутящего момента, вычисленную вторым логическим блоком 60 исходя из отклонения V∆ скорости, суммируемого со скоростью, задаваемой в настоящий момент двигателем 31, или вычитаемого из этой скорости. Другими словами, второй сигнал 61 ошибки указывает, должна ли увеличиваться или уменьшаться мощность двигателя 31 для увеличения или уменьшения нагрузки 30 и если да, то на какую величину.
В предпочтительном, но не являющемся единственно возможным, примере осуществления изобретения первый и второй логические блоки 51 и 60 могут принадлежать одному программируемому логическому контроллеру (ПЛК) 70. С другой стороны, первый логический блок 51 и регулирующее устройство 60 могут принадлежать одной управляющей перфокарте.
Таким образом, в каждый момент времени тренажер адаптирует нагрузку 30 к работе, выполняемой пользователем, увеличивая ее, если пользователь выполняет работу свыше идеальной работы, и уменьшает ее, если пользователь выполняет меньшую работу, чем идеальная работа.
Для этого в момент, когда рабочая скорость Vb выполнения физического упражнения отклоняется от идеальной эталонной скорости Vr, тренажер автоматически воздействует на нагрузку 30 так, чтобы понизить мощность двигателя 31, если V∆=Vb - Vr имеет отрицательное значение, потому что пользователь устает и, поэтому, нагрузка уменьшается, чтобы позволить ему правильно выполнить физическое упражнение, и повысить мощность двигателя 31, если V∆ имеет положительное значение, потому что пользователь работает выше уровня идеальной работы и, поэтому, нагрузка увеличивается для обеспечения возможности правильного выполнения физического упражнения.
Следовательно, рабочая скорость выполнения физического упражнения пользователем изменяется в каждый данный момент времени вследствие регулирования нагрузки, осуществляемой тренажером.
Таким образом, опасность выполнения неконтролируемых и опасных работ из-за неправильных действий пользователя сводится к минимуму или может быть полностью исключена. В частности, сводится к минимуму опасность повреждений мышц в период окончания выполнения физических упражнений, когда пользователь более устал вследствие первоначально выполненной работы.
Задаваемые значения скорости являются индивидуальными параметрами пользователя и очень зависят от тренировки. Например, они могут быть зафиксированы исходя из эквивалентности, задаваемой кривой “скорость - сила”, после того как пользователю была предоставлена возможность работы на основе стандартной кривой, согласно методам, известным специалистам в данной области техники.
Как уже указывалось выше, это задание может быть установлено вручную, например с помощью сенсорного дисплея, или автоматически, как упоминалось выше.
В частности, значение Vr может быть установлено таким, чтобы оно соответствовало значению идеальной работы для развития мышечной массы и/или взрывного усилия пользователя. После того как это значение установлено, ПЛК должен быть настроен на такое эталонное значение Vr, так что система корректирует нагрузку каждый раз, когда пользователь отклоняется от этого значения.
Соответственно, возможность настройки ПЛК 70 на ряд эталонных значений, например на два, для обеспечения возможности выбора каждый раз такого типа физического упражнения, который наиболее подходит для собственных потребностей.
В частности, ПЛК 70 может быть настроен на два эталонных значения скорости, при этом первое значение соответствует значению Vr,min идеальной работы для развития мышечной массы и второе значение соответствует значению Vr,max идеальной работы для развития взрывного усилия пользователя. Тренажер будет каждый раз корректировать нагрузку с тем, чтобы пользователь мог работать в окрестности одного из этих двух значений.
С другой стороны, возможно программирование ПЛК 70 так, чтобы пользователь был вынужден работать в интервале скоростей между этими двумя значениями Vr,max, Vr,min, или, во всяком случае, в интервале между двумя значениями идеальной скорости, рассчитанными таким образом, что физическое упражнение эффективно для пользователя, при этом нагрузка 30 уменьшается, если рабочая скорость выполнения физического упражнения, выявленная дешифратором 50´, ниже, чем нижнее из двух эталонных значений, Vr,min, и увеличивается, если выявленная скорость Vb выше, чем верхнее эталонное значение Vr,max.
В этом последнем случае пользователь, фактически, выполняет большую работу, чем максимальная работа, выполняемая пользователем так, что физическое упражнение является эффективным, тогда как в первом случае пользователь выполняет меньшую работу, чем минимальная идеальная работа. Поэтому и в этом случае тренажер тоже корректирует нагрузку так, чтобы вынудить пользователя работать в пределах интервала работы, идеального для эффективности физического упражнения, избегая в то же время повреждений мышц.
Преимущественно, возможна также настройка первого логического блока 51 по меньшей мере на одно опасное значение Vs скорости, соответствующее предельной величине работы, которую пользователь может выполнить в безопасных условиях. Это значение может быть определено согласно методам, известным специалисту в данной области техники. Преимущественно, может быть предусмотрено наличие устройства 80, блокирующего качающийся рычаг 20, функционально связанный с логическим блоком 51, если значение Vb скорости, выявленное дешифратором 50´, равно значению Vs.
Даже в том случае, если в вариантах осуществления, изображенных на фиг. 1, 2, 3, 7 и 8, автоматическое регулирование опасной скорости Vs выполняется первым логическим блоком 51, который автоматически регулирует также эталонную скорость Vr, это регулирование может быть выполнено с помощью третьего логического блока, соединенного с блокировочным устройством 80 и следующего за первым блоком 51, или при помощи системной программы 100, как показано для вариантов осуществления по фиг. 4, 5 и 6, что не выходит за пределы объема изобретения, определенного прилагаемой формулой изобретения.
При выявлении дешифратором 50´ значения Vb скорости, равного значению Vs, блокировочное устройство 80 может воздействовать на двигательное устройство 31 так, что вызывает его торможение, в данном случае постепенно, чтобы пользователь не получил телесных повреждений. Для этой цели блокировочное устройство 80 может содержать блок 81 торможения, действующий таким образом, что обрабатывает сигнал 82 ошибки, поступающий с выхода первого логического блока 51, генерируемый в результате выявления значения Vb скорости, равного значению Vs, и посылает сигнал 83 возможного постепенного торможения к двигательному устройству 31.
С другой стороны, блокировочное устройство 80 может содержать устройство 84 тревожной сигнализации, действующее так, что обрабатывает сигнал 82, поступающий с выхода первого логического блока 51, и выдает сигнал 85 для приведения в действие сигнализатора 86, например, акустического и/или визуального типа, чтобы тем самым предупредить пользователя об опасности.
Кроме того, блокировочное устройство 80 может содержать устройство возврата в исходное положение, предназначенное для установки качающегося рычага 20 обратно в его исходное положение. С этой целью такое устройство возврата в исходное положение может содержать блок 87, действующий так, что обрабатывает сигнал 88, поступающий с выхода блока 81 торможения, и посылает к двигательному устройству 31 сигнал 89 приведения в действие автоматической регулировки положения качающегося рычага 20.
Сигнал 88 выдается блоком 81 торможения по истечении периода времени t продолжительностью, например, 1-2 секунды с момента подачи сигнала 83 торможения в двигательное устройство 81.
Для того чтобы тренажер 1 запомнил положение приостановки качающегося рычага 20, перед выполнением физического упражнения может быть совершено движение, за которым следует произвольная приостановка в работе пользователя, сначала с сокращенной мышцей и затем с растянутой мышцей. Исходное положение может, поэтому, соответствовать растянутому положению мышцы и может быть по своему выбору или автоматически запомнено в ПЛК 70.
Это движение пользователя соответствует максимальному ходу ползуна 21 и изменяется от одного пользователя к другому. Может быть также предусмотрено наличие двух механических фиксаторов, положение которых вдоль штанги 22 может изменяться в соответствии с началом и концом хода ползуна 21.
Сигнал 89 в таком случае выдает двигателю 31 команду на изменение положения качающегося рычага 20 в исходном положении, заранее заданном на ПЛК 70.
В первом предпочтительном, но не являющемся единственно возможным, варианте осуществления опасное значение Vs скорости, задаваемое на ПЛК 70, может быть минимальным опасным значением Vs,min скорости, соответствующим минимальной работе, выполнение которой пользователем неопасно, ниже которого пользователь может получить телесные повреждения. С другой стороны, можно произвести настройку ПЛК 70 на максимальное опасное значение Vs,max, соответствующее максимальной работе, выполнение которой пользователем безопасно для него, попеременно или вместе с настройкой на значение Vs,min.
Соответственно, первый логический блок 51 может осуществлять двойное автоматическое регулирование скорости Vb, выявляемой дешифратором 50´, при этом первое автоматическое регулирование обеспечивает проверку равенства скорости Vb значению Vs,min или значению Vs,max и, в связи с этим, выдачу в блокировочное устройство 80 команды на блокировку качающегося рычага 20 в случае получения положительного результата, и второе автоматическое регулирование обеспечивает проверку на наличие отклонения от эталонного значения Vb и, в связи с этим, выдачу в регулирующее устройство 60 команды корректировки величины нагрузки 30.
С другой стороны, ПЛК 70 может осуществлять два контроля безопасности, первый из которых обеспечивает проверку на равенство рабочей скорости выполнения физического упражнения значению Vs,min и второй обеспечивает проверку на ее равенство значению Vs,max, при этом он вызывает блокировку качающегося рычага 20 посредством устройства 80 в случае получения положительного результата.
Выбор между мгновенным и постепенным остановом, который производится по команде, поступающей с сигналом 83 к двигателю 31, зависит от различных факторов и может быть заранее задан в блоке 81. В первом предпочтительном, но не являющемся единственно возможным варианте осуществления, существует возможность задания мгновенного или постепенного торможения независимо от выявленного значения Vb.
С другой стороны, возможно задание торможения на основании равенства выявленного значения Vb или значению Vs,min или значению Vs,max.
Фактически, если Vb равно Vs,min, сразу же может быть вызвано торможение двигателя, потому что рабочая скорость выполнения упражнения пользователем, по существу, низкая, и мгновенное торможение не может причинить ему каких бы то ни было повреждений.
Если же, наоборот, Vb равна Vs,max, возможно осуществление постепенного торможения, потому что рабочая скорость выполнения пользователем физического упражнения, по существу, высокая, и мгновенное торможение может причинить ему повреждения.
Постепенное торможение двигателя 31 может быть осуществлено путем подачи непосредственно к двигателю с сигналом 83 команды на торможение по линейному закону с большим или меньшим наклоном характеристики торможения, согласно методам, известным специалистам в данной области техники.
Соответственно, скорость может постепенно уменьшаться, например, сначала на одну десятую, затем на одну пятую от предыдущего значения и так далее до тех пор, пока она не станет соответствовать значению Vs,min, после чего блок 81, по истечении периода времени t, выдает сигнал 88 в блок 87 для возврата качающегося рычага в исходное положение при той же самой скорости Vs,min.
В третьем и четвертом вариантах осуществления тренажера 1, изображенных на фиг. 4 и 5, пользователь, воздействуя на качающийся рычаг 20, не выполняет непосредственно работу по преодолению крутящего момента, создаваемого двигательным устройством 31.
С этой целью, для передачи движения между двигателем 31 и качающимся рычагом 20, может быть предусмотрен бесконечный винт 45, закрепленный шпонкой к оси 32 двигателя 31. Бесконечный винт 45 функционально связан с шестерней 46, которая жестко соединена с качающимся рычагом 20 при помощи металлической штанги 47.
Таким образом, пользователь выполняет работу против действия силы трения, возникающего между шестерней 46 и бесконечным винтом 45, то есть против действия механической силы.
В этом случае параметром, текущий контроль которого осуществляется устройством управления, управляющим работой пользователя, может быть сила, с которой пользователь воздействует на качающийся рычаг 20.
Для этой цели измерительный преобразователь может содержать датчик 50´´ механической нагрузки, который может быть или соединен, или не соединен с качающимся рычагом 20. Действительно, в варианте осуществления по фиг. 4 датчик 50´´ механической нагрузки соединен с качающимся рычагом 20, тогда как в варианте осуществления по фиг. 5 датчик 50´´ механической нагрузки не соединен с качающимся рычагом 20.
Как показано на фиг. 6, в отличие от первого и второго вариантов осуществления, изображенных на фиг. 1 и 2, регулирование нагрузки 30 осуществляется исходя из значений силы, а не значений скорости или ускорения.
В таком случае управление осуществляется при помощи одного логического блока 51, который взаимодействует с системной программой 100.
За исключением этих различий, работа этих вариантов осуществления эквивалентна работе вариантов осуществления, изображенных на фиг. 1 и 2.
Поэтому целесообразно, чтобы первый логический блок 51 управления, функционально связанный с датчиком 50´´ механической нагрузки, можно было автоматически или вручную настроить по меньшей мере на одно эталонное значение Fr силы и чтобы он действовал так, чтобы сравнивал в определенные интервалы времени значение Fb силы, выявленное датчиком 50´´ механической нагрузки, с эталонным значением Fr и приводил в действие регулирующее устройство 60, определенное подпрограммой 102 и компьютерной программой 100, в случае несовпадения двух значений.
Подпрограмма 102 вычисляет отклонение F∆ выявленной силы Fb от эталонной силы Fr, другими словами, определяет наличие отклонения и насколько сила, с которой пользователь воздействует на качающийся рычаг 20, больше или меньше идеальной силы.
Подпрограмма 102, кроме того, вычисляет отклонение С∆ крутящего момента, включая его во второй сигнал 61 ошибки, направляемый к двигателю 31.
В момент, когда сила Fb, с которой выполняется физическое упражнение, отклоняется от идеальной эталонной силы Fr, программа 100 автоматически воздействует на нагрузку 30 с тем, чтобы обеспечить отбор мощности от двигателя 31, если F∆=Fb - Fr имеет отрицательное значение, когда пользователь устает и, поэтому, нагрузка уменьшается для обеспечения возможности правильного выполнения им физического упражнения, и обеспечить подвод дополнительной мощности к двигателю 31, если F∆ имеет положительное значение, потому что выполняемая пользователем работа превышает идеальную работу, в связи с чем, нагрузка увеличивается для обеспечения возможности правильного выполнения им физического упражнения.
Кроме того, в третьем и четвертом вариантах осуществления тренажера 1, изображенных на фиг. 4 и 5, возможна настройка блока ПЛК 70 на ряд эталонных значений, например, на максимальную эталонную силу Fr,max и минимальную эталонную силу Fr,min, и настройка тренажера так, чтобы пользователь работал в пределах этого интервала.
Возможна также настройка первого логического блока 51 по меньшей мере на одно опасное значение Fs силы и настройка блокировочного устройства 80 так, чтобы оно блокировало, в частности, постепенно, качающийся рычаг 20, функционально связанный с логическим блоком 51, если значение Fb силы, выявленное датчиком 50´´ механической нагрузки, равно значению Fs.
Даже в том случае, если в первом и втором вариантах осуществления, изображенных на фиг. 1 и 2, регулирование нагрузки 30 осуществляется при помощи двух логических блоков 51 и 60 управления и в третьем и четвертом вариантах осуществления, изображенных на фиг. 4 и 5, регулирование осуществляется при помощи одного логического блока 51, понятно, что для всех вариантов осуществления тренажера 1 регулирование нагрузки 30 может осуществляться любым способом в пределах объема изобретения, определенного в прилагаемой формуле изобретения.
В частности, в вариантах осуществления, изображенных на фиг. 1 и 2, существует возможность корректировки нагрузки 30 при помощи системной программы 100, которая взаимодействует с одним блоком 51 управления, или в вариантах осуществления, показанных на фиг. 4 и 5, существует возможность корректировки нагрузки 30 при помощи системной программы 100, которая взаимодействует с двумя логическими блоками 51 и 60 управления.
Работа пятого варианта осуществления тренажера 1, изображенного на фиг. 7, аналогична работе первого и второго вариантов осуществления, изображенных на фиг. 1 и 2. Также и в этом случае фактически тренажер корректирует нагрузку исходя из значений скорости, выявленных дешифратором 50´, закрепленным шпонкой на оси двигателя 31, противодействие которого пользователь непосредственно преодолевает при выполнении им работы.
Единственное отличие состоит в том, что в этом случае качающемуся рычагу 20 задается движение поворота вокруг оси Y, а не движение скольжения вдоль оси Х. Работа измерительного преобразователя 50, первого логического блока 51 и регулирующего устройства 60 идентична, как видно из фиг. 7.
Соответственно, тренажер 1 может иметь в своем составе блок 90 для электромагнитной стимуляции мышц человека.
На фиг. 8 изображен в качестве примера, не ограничивающего объем изобретения, вариант осуществления тренажера 1, аналогичный варианту осуществления, изображенному на фиг. 1, который включает в себя блок 90. Однако очевидно, что блок 90 может быть включен в любую конфигурацию тренажера 1 и, в частности, в конфигурацию по фиг. 2-7, что не выходит за пределы объема изобретения, выраженного прилагаемой формулой изобретения.
В другом варианте осуществления, изображенном на фиг. 9, тренажер, включающий в себя блок 90, может не содержать регулирующее устройство 60. Другими словами, тренажер, в состав которого входит блок 90, может быть выполнен так, что он не будет корректировать работу пользователя до идеальной работы. В этом случае рекомендованная работа, задаваемая автоматически или вручную на логическом блоке 51, представляет собой опасную работу.
Блок 90 может содержать по меньшей мере одну катушку 91 индуктивности, размещаемую вблизи по меньшей мере одной мышцы пользователя по меньшей мере один источник 92 питания, подключенный к катушке индуктивности для генерирования по меньшей мере одного электромагнитного поля, и генератор 93 импульсного тока, предназначенный для подачи импульсов тока, имеющих определенную частоту и длительность, к катушке 91 индуктивности, чтобы вызвать непроизвольное сокращение и расслабление мышцы человека, вблизи от которой расположена катушка 91 индуктивности.
Например, блок 90 может быть расположен так, как указано в патенте США US 6652443 и/или в международной заявке на патент WO 0225675, упоминаемых здесь для получения справочных сведений.
Таким образом, существует возможность тренировки пользователя с максимальной эффективностью.
С помощью электромиографии фактически можно узнать текущую частоту и текущую интенсивность, подходящие для сокращения и расслабления одной или более интересующих мышц. Размещение катушки 91 индуктивности рядом с интересующей мышцей или группой мышц даст возможность обеспечить путем индукции сжатие и расслабление даже помимо воли пользователя, что делает тренировку особенно эффективной.
Во избежание нанесения повреждений пользователю, первый логический блок 51 управления функционально связан с блоком 90 электромагнитной стимуляции для автоматического отключения источника 92 питания, если работа, выявленная измерительным преобразователем 50, совпадает с работой, заданной как опасная, то ли это Vs, то ли Fs.
Кроме того, можно настроить блок 90 так, чтобы генератор 93 импульсов тока генерировал импульсы тока различной частоты и длительности в зависимости от того, поднимает пользователь качающийся рычаг или же опускает его.
Согласно другой особенности изобретения, предлагается способ управления нагрузкой 30 в тренажере 1, который может быть осуществлен с помощью программного продукта, в частности с помощью системной программы 100.
Программный продукт может включать одно или более устройств поддержки памяти, которые могут быть фиксированными, например, один или более жестких дисков, или удаляемыми, например, один или более флоппи-дисков, CD или DVD, на которых зафиксирована программа 100. Устройства поддержки памяти могут взаимодействовать с логическим блоком 51 управления, чтобы управлять нагрузкой 30.
Программный продукт может содержать, кроме того, одну или более интегральных схем, принадлежащих логическому блоку 51 управления.
В случае тренажера с двумя логическими блоками 51, 60 системная программа 100 может взаимодействовать с обоими этими блоками или же каждый блок 51, 60 может быть обеспечен своей собственной системной программой.
Программа 100 может заключать в себе первую подпрограмму 101, действующую так, что она взаимодействует с измерительным преобразователем 50, при этом она считывает первое значение Vb или Fb, выявленное измерительным преобразователем 50, и сравнивает это первое значение Vb или Fb со вторым эталонным значением Vr или Fr.
Программа 100 может заключать в себе, кроме того, вторую рабочую подпрограмму 102, активируемую первой рабочей подпрограммой 101, если сравниваемые значения не совпадают. Вторая рабочая подпрограмма может быть спроектирована так, чтобы генерировать первую информацию 53, касающуюся отклонения V∆ или F∆ первого значения Vb или Fb от второго значения Vr или Fr.
Вторая рабочая подпрограмма 102 может также обрабатывать первую информацию 53 и генерировать вторую информацию 62, касающуюся отклонения С∆, добавляемого к нагрузке 30 или вычитаемого из нее.
В частности, вторая информация 62 может быть представлена в виде положительного отклонения С∆, если первая информация 53 включает положительное отклонение V∆ или F∆, то есть, если выявленная работа больше, чем рекомендованная работа, и отрицательного отклонения С∆, если первая информация 53 включает отрицательное отклонение V∆ или F∆, то есть, если первая информация 53 включает отрицательное отклонение, то есть, если выявленная работа меньше, чем рекомендованная работа.
Вторая рабочая подпрограмма 102 может, к тому же, обрабатывать вторую информацию 62, чтобы вызвать увеличение нагрузки 30, если вторая информация 62 включает положительное отклонение С∆, и вызвать ее уменьшение, если вторая информация 62 включает отрицательное отклонение С∆.
В случае тренажера с одним логическим блоком 51, вторая рабочая подпрограмма 102 практически определяет регулирующее устройство 60. Другими словами, регулирующее устройство 60 может быть представлено подпрограммой 102.
Очевидно, что в случае осуществления управления двумя логическими блоками 51 и 60, как для вариантов осуществления, изображенных на фиг. 1, 2, 3, 7 и 8, первая подпрограмма 101 может взаимодействовать с логическим блоком 51 или она может быть реализована в нем, тогда как вторая подпрограмма 102 может взаимодействовать со вторым логическим блоком 60 или может быть реализована в нем.
Преимущественно, системная программа 100, кроме того, может содержать третью подпрограмму 103, действующую так, что сравнивает первое значение Vb или Fb, выявленное измерительным преобразователем 50, с третьим значением Vs или Fs, соответствующим опасной для пользователя работе.
Третья рабочая подпрограмма 103 может, кроме того, взаимодействовать с блокировочным устройством 80, приводя его в действие, если два сравниваемых значения не совпадают.
Согласно другой особенности изобретения, предлагается комплект для получения тренажера 1 путем модифицирования существующего стандартного тренажера для выполнения силовых упражнений, который включает в себя качающийся рычаг, нагрузку, обычно включающую ряд дисков штанги определенного веса, и элемент передачи движения, обычно тросового или ременного типа, имеющий первый конец, соединенный с качающимся рычагом, и второй конец, соединенный с нагрузкой.
В состав комплекта могут входить двигатель 31, который может заменить существующую нагрузку, устройство для жесткого соединения существующего качающегося рычага с двигателем 31, для замены существующего элемента передачи движения, измерительный преобразователь 50, первый логический блок 51 управления и регулирующее устройство 60.
Модифицирование существующего тренажера может, кроме того, предусматривать соединение с ним измерительного преобразователя 50, первого логического блока 51 управления и регулирующего устройства 60.
В предпочтительном, но не являющемся единственно возможным, варианте осуществления первый логический блок 51 и, если он имеется, второй логический блок 60 преимущественно принадлежат одному блоку управления ПЛК 70.
В состав комплекта преимущественно может входить компьютерная программа 100.
С помощью вышеописанного комплекта можно упростить и быстро модифицировать один или более существующих стандартных тренажеров для выполнения силовых физических упражнений, например, стандартные тренажеры, находящиеся в спортивном зале или в фитнес-центре.
Приведенное выше подробное описание изобретения ясно показывает, что изобретение удовлетворяет требования намеченных областей применения, в частности области создания тренажера для выполнения силовых физических упражнений, который может использоваться любым пользователем, даже малоопытным, совершенно безопасно.
Другим преимуществом тренажера согласно изобретению является простота изготовления.
Следующим преимуществом тренажера согласно изобретению является чрезвычайно высокая эффективность тренировки.
Изобретение допускает многочисленные изменения и варианты в пределах идеи изобретения, выраженной в прилагаемой формуле изобретения. Все детали могут быть заменены другими технически эквивалентными элементами, и материалы могут отличаться в зависимости от потребностей, не выходя за пределы объема изобретения, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПАССИВНОГО ПРИЛОЖЕНИЯ СИЛЫ ПОСТУКИВАНИЯ ПО СТОПАМ И СПОСОБ ТЕРАПИИ (ВАРИАНТЫ) | 2014 |
|
RU2688794C2 |
| СИЛОВОЙ ТРЕНАЖЁР | 2016 |
|
RU2620488C1 |
| Система для коррекции нарушений осанки пользователя | 2022 |
|
RU2804189C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2007 |
|
RU2344863C2 |
| ОБОРУДОВАНИЕ ДЛЯ РЕАБИЛИТАЦИИ ДВИЖЕНИЯ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ | 2017 |
|
RU2756370C2 |
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭФФЕКТИВНОСТИ ДЕЙСТВИЙ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ РАБОТЫ ТРЕНАЖЕРА | 2019 |
|
RU2822082C2 |
| ОФИСНОЕ ИЛИ ДОМАШНЕЕ КРЕСЛО, ОСНАЩЕННОЕ СРЕДСТВАМИ ДЛЯ ФИЗИЧЕСКОЙ РАЗМИНКИ | 2004 |
|
RU2250068C1 |
| Способ организации тренировочного процесса и система для его осуществления | 2020 |
|
RU2733870C1 |
Тренажер для выполнения пользователем силовых физических упражнений, содержащий качающийся рычаг (20), перемещаемый пользователем для выполнения работы, и нагрузку (30), соединенную с ним для оказания противодействия работе пользователя. Предусмотрены устройства (50, 51) управления для текущего контроля работы (Vb; Fb) пользователя и ее сравнения по меньшей мере с одним эталонным значением (Vr; Fr), задаваемым вручную или автоматически. Тренажер включает в себя, кроме того, регулирующее устройство (60), функционально связанное с устройствами управления (50, 51) и воздействующее на нагрузку (30) так, что вызывает автоматическое увеличение ее в случае, если выявленная работа больше, чем рекомендованная работа, и автоматическое уменьшение нагрузки (30) в случае, если выявленная работа меньше, чем рекомендованная работа. Технический результат заключается в снижении риска получения травмы во время тренировки. 2 н. и 19 з.п. ф-лы, 9 ил.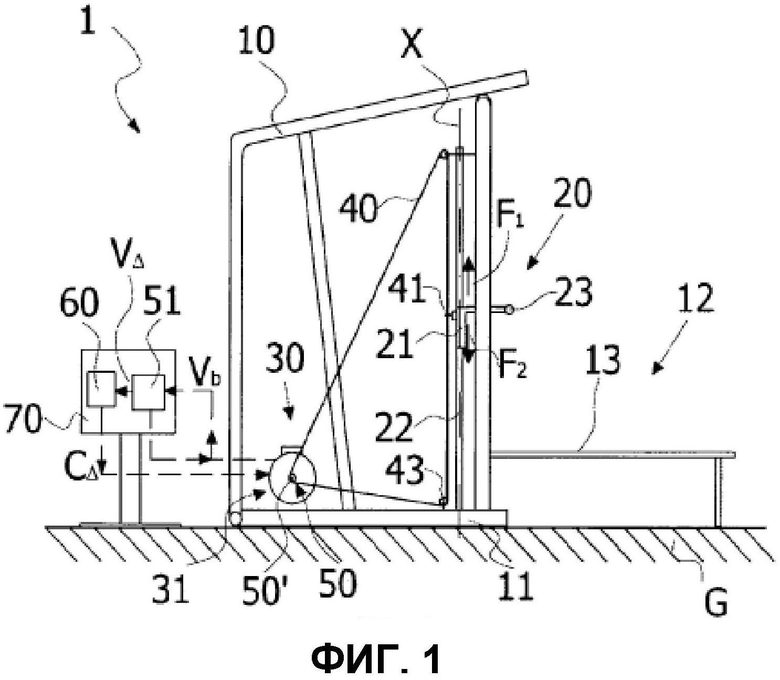
1. Тренажер для выполнения пользователем силовых физических упражнений, содержащий:
- качающийся рычаг (20), перемещаемый пользователем, чтобы выполнить мышечную работу;
- нагрузку (30), соединенную с указанным качающимся рычагом (20) для оказания противодействия мышечной работе пользователя;
- измерительный преобразователь (50) для выявления в определенные интервалы времени по меньшей мере одного первого значения по меньшей мере одного параметра (Vb; Fb), соответствующего мышечной работе, выполненной пользователем по преодолению усилия указанной нагрузки (30);
- по меньшей мере один логический блок (51) управления, функционально связанный с указанным измерительным преобразователем (50), сравнивающий указанное по меньшей мере одно первое значение (Vb; Fb), выявленное последним, по меньшей мере с одним вторым значением (Vr; Fr) по меньшей мере одного параметра, соответствующего рекомендованной работе, которая является для пользователя тренировочной;
- регулирующее устройство (60), функционально связанное с указанным по меньшей мере одним первым логическим блоком (51) управления и воздействующее на указанную нагрузку (30) так, что вызывает автоматическое увеличение ее в случае, если работа, выявленная указанным измерительным преобразователем (50), больше, чем рекомендованная работа;
при этом указанное регулирующее устройство (60), кроме того, предназначено для автоматического уменьшения указанной нагрузки (30) в случае, если работа, выявленная указанным измерительным преобразователем (50), меньше, чем рекомендованная работа, причем указанный по меньшей мере один логический блок (51) управления действует так, что вычисляет первое отклонение (VΔ; FΔ) работы, выявленной указанным измерительным преобразователем (50), от рекомендованной работы, причем указанное регулирующее устройство (60) выполнено с возможностью вычисления исходя из указанного первого отклонения (VΔ; FΔ), второго отклонения (СΔ), суммируемого с указанной нагрузкой (30) или вычитаемого из нее для ее увеличения или уменьшения, указанное второе отклонение (СΔ) является положительным в случае, если указанное первое отклонение (VΔ; FΔ) является положительным, и является отрицательным в случае, если указанное первое отклонение (VΔ; FΔ) является отрицательным.
2. Тренажер по п. 1, отличающийся тем, что указанный по меньшей мере один логический блок (51) управления действует так, что активирует указанное регулирующее устройство (60) в случае, если работа, выявленная указанным измерительным преобразователем (50), отличается от рекомендованной работы.
3. Тренажер по п. 1, отличающийся тем, что указанный по меньшей мере один логический блок (51) управления выполнен с возможностью сравнения указанного по меньшей мере одного первого значения (Vb; Fb), выявленного указанным измерительным преобразователем (50), с двумя вторыми значениями (Vr,max, Vr,min; Fr,max, Fr,min) указанного по меньшей мере одного параметра, соответствующего максимальной и минимальной рекомендованной для пользователя тренировочной работе, причем указанное регулирующее устройство (60) предназначено для автоматического увеличения указанной нагрузки (30) в случае, если работа, выявленная указанным измерительным преобразователем (50), равна максимальной рекомендованной работе или превышает ее, и для автоматического уменьшения указанной нагрузки (30) в случае, если работа, выявленная указанным измерительным преобразователем (50), равна минимальной рекомендованной работе или меньше нее.
4. Тренажер по п. 1, отличающийся тем, что указанный по меньшей мере один логический блок (51) управления, кроме того, предназначен для сравнения указанного по меньшей мере одного первого значения (Vb; Fb), выявленного указанным измерительным преобразователем (50), по меньшей мере с одним третьим значением (Vs; Fs) по меньшей мере одного параметра, соответствующего работе, которая представляет опасность для пользователя, причем введено блокировочное устройство (80), функционально связанное с указанным по меньшей мере одним логическим блоком (51) управления и воздействующее на указанный качающийся рычаг (20) и/или на указанную нагрузку (30) так, что вызывает автоматическую блокировку ее в случае, если выявленная работа равна опасной работе, с тем чтобы позволить пользователю непрерывно выполнять работу безопасным образом.
5. Тренажер по п. 4, отличающийся тем, что указанный по меньшей мере один логический блок (51) управления предназначен для сравнения указанного по меньшей мере одного первого значения (Vb; Fb), выявленного указанным измерительным преобразователем (50), с двумя третьими значениями (Vs,max, Vs,min; Fs,max, Fs,min) указанного по меньшей мере одного параметра, соответствующего максимальной и минимальной безопасно выполняемой работе, причем указанное блокировочное устройство (80) выполнено с возможностью автоматической блокировки указанного качающегося рычага (20) и/или указанной нагрузки (30) в случае, если работа, выявленная указанным измерительным преобразователем (50), равна максимальной безопасной работе или больше нее, указанное блокировочное устройство (80), кроме того, предназначено для автоматической блокировки указанного качающегося рычага (20) и/или указанной нагрузки (30) в случае, если работа, выявленная указанным измерительным преобразователем (50), равна минимальной безопасной работе или меньше нее.
6. Тренажер по п. 1, отличающийся тем, что указанная нагрузка (30) содержит двигательное устройство (31), выполненное с возможностью создания крутящего момента, действующего так, что он оказывает противодействие работе пользователя по преодолению усилия указанной нагрузки (30), причем указанный качающийся рычаг (20) и указанное двигательное устройство (31) взаимно соединены.
7. Тренажер по любому из пп. 4-6, отличающийся тем, что указанное блокировочное устройство (80) содержит блок (81) торможения, функционально связанный с указанным по меньшей мере одним логическим блоком (51) управления для его активирования под действием указанного третьего сигнала (82) ошибки и воздействующий на указанное двигательное устройство (31) так, что вызывает его торможение.
8. Тренажер по любому из пп. 4-6, отличающийся тем, что указанный измерительный преобразователь (50) функционально связан с указанным качающимся рычагом (20), чтобы выявлять его перемещение, сообщаемое пользователем, в результате выполнения работы по преодолению усилия указанной нагрузки (30).
9. Тренажер по п. 8, отличающийся тем, что содержит, кроме того, устройство (40, 41, 42) передачи движения типа замкнутого кольца для взаимного соединения указанного измерительного преобразователя (50), указанного двигательного устройства (31) и указанного качающегося рычага (20).
10. Тренажер по п. 8, отличающийся тем, что указанный измерительный преобразователь содержит дешифратор (50′), соответственно акселерометр, функционально связанный с указанным двигательным устройством (31), чтобы выявлять скорость (Vb), соответственно ускорение, указанного качающегося рычага (20) как результат работы пользователя.
11. Тренажер по п. 1, отличающийся тем, что указанный измерительный преобразователь (50) предназначен для выявления силы, с которой пользователь перемещает указанный качающийся рычаг (20).
12. Тренажер по п. 11, отличающийся тем, что указанный измерительный преобразователь (50) соединен с указанным качающимся рычагом (20).
13. Тренажер по п. 12, отличающийся тем, что указанный измерительный преобразователь содержит датчик (50″) механической нагрузки, выявляющий силу (Fb), с которой пользователь перемещает указанный качающийся рычаг (20).
14. Тренажер по п. 1, отличающийся тем, что содержит блок (90) электромагнитной стимуляции мышц человека, который включает в себя по меньшей мере одну катушку (91) индуктивности, размещаемую вблизи по меньшей мере одной мышцы пользователя по меньшей мере один источник (92) питания, соединенный с указанной катушкой (91) индуктивности для создания по меньшей мере одного электромагнитного поля, и генератор (93) импульсного тока, генерирующий импульсы тока определенной частоты и длительности, подаваемые к указанной катушке (91) индуктивности, под действием которых происходит непроизвольное сокращение и расслабление мышцы человека, вблизи которой расположена указанная катушка (91) индуктивности.
15. Тренажер по п. 14, отличающийся тем, что указанный по меньшей мере один первый логический блок (51) управления функционально связан с указанным блоком (90) электромагнитной стимуляции так, что вызывает автоматическое отключение указанного по меньшей мере одного источника (92) питания, если работа (Vb; Fb), выявленная указанным измерительным преобразователем (50), совпадает с опасной работой (Vs; Fs).
16. Тренажер по п. 14, отличающийся тем, что в его состав не входит указанное регулирующее устройство (60) и указанный по меньшей мере один первый логический блок (51) управления предназначен для сравнения указанного по меньшей мере одного первого значения (Vb; Fb), выявленного указанным измерительным преобразователем (50), исключительно с указанным третьим значением (Vs; Fs), соответствующим опасной работе, а не с указанным по меньшей мере одним вторым значением (Vr; Fr), соответствующим тренировочной работе.
17. Тренажер по п. 1, отличающийся тем, что указанное по меньшей мере одно второе значение (Vr; Fr) по меньшей мере одного параметра, соответствующего рекомендованной для пользователя тренировочной работе, задается пользователем вручную, соответственно автоматически задается компьютерной программой, взаимодействующей с указанным по меньшей мере одним первым логическим блоком (51).
18. Способ регулировки нагрузки (30) в тренажере (1) для выполнения пользователем силовых физических упражнений по п. 1, включающий следующие операции:
- выявление в определенные интервалы времени по меньшей мере одного первого значения (Vb; Fb) по меньшей мере одного параметра, соответствующего мышечной работе по преодолению пользователем усилия нагрузки (30);
- сравнение указанного по меньшей мере одного первого выявленного значения (Vb; Fb) по меньшей мере с одним вторым значением (Vr; Fr) по меньшей мере одного параметра, соответствующего рекомендованной для пользователя тренировочной работе;
- вычисление первого отклонения (VΔ; FΔ) указанного первого значения (Vb; Fb) от указанного по меньшей мере одного второго значения (Vr; Fr), если указанное по меньшей мере одно первое значение (Vb; Fb) отличается от указанного по меньшей мере одного второго значения (Vr; Fr);
- вычисление исходя из указанного первого отклонения (VΔ; FΔ), второго отклонения (СΔ), суммируемого с нагрузкой (30) тренажера (1) или вычитаемого из этой нагрузки для ее увеличения или уменьшения, при этом указанное второе отклонение (СΔ) является положительным, если указанное первое отклонение (VΔ; FΔ) является положительным, и является отрицательным, если указанное первое отклонение (VΔ; FΔ) является отрицательным;
- регулирование указанной нагрузки (30) исходя из указанного второго отклонения (СΔ);
причем указанная операция регулирования нагрузки (30) включает ее увеличение, если указанное второе отклонение (СΔ) является положительным, и ее уменьшение, если указанное второе отклонение (СΔ) является отрицательным.
19. Способ по п. 18, отличающийся тем, что включает, кроме того, следующие операции:
- сравнение указанного по меньшей мере одного первого выявленного значения (Vb; Fb) по меньшей мере с одним третьим значением (Vs; Fs) по меньшей мере одного параметра, соответствующего опасной для пользователя работе;
- блокировка нагрузки (30) и/или качающегося рычага (20) тренажера (1), если указанное по меньшей мере одно первое выявленное значение (Vb; Fb), по существу, равно указанному по меньшей мере одному третьему значению (Vr; Fr).
20. Способ по п. 19, отличающийся тем, что указанную операцию сравнения указанного по меньшей мере одного первого значения (Vb; Fb) с указанным по меньшей мере одним третьим значением (Vs; Fs) выполняют до проведения сравнения указанного по меньшей мере одного первого значения (Vb; Fb) с указанным по меньшей мере одним вторым значением (Vr; Fr).
21. Способ по п. 19, отличающийся тем, что указанная операция выявления включает операцию взаимодействия с измерительным преобразователем (50) тренажера, указанная операция регулировки нагрузки (30) включает операцию взаимодействия с двигательным устройством (31) тренажера.
| US 4765613 A, 23.08.1988 | |||
| US 5244441 A, 14.09.1993 | |||
| US 2008248926 A1, 09.10.2008 | |||
| EP 0551962 A2, 21.07.1993. |

