Область техники
Настоящее изобретение относится к области связи и, конкретнее, относится к способу определения параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением.
Предпосылки изобретения
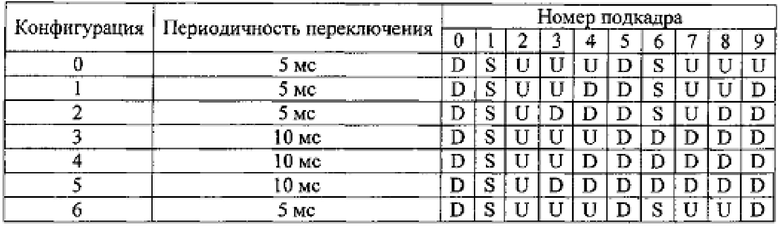
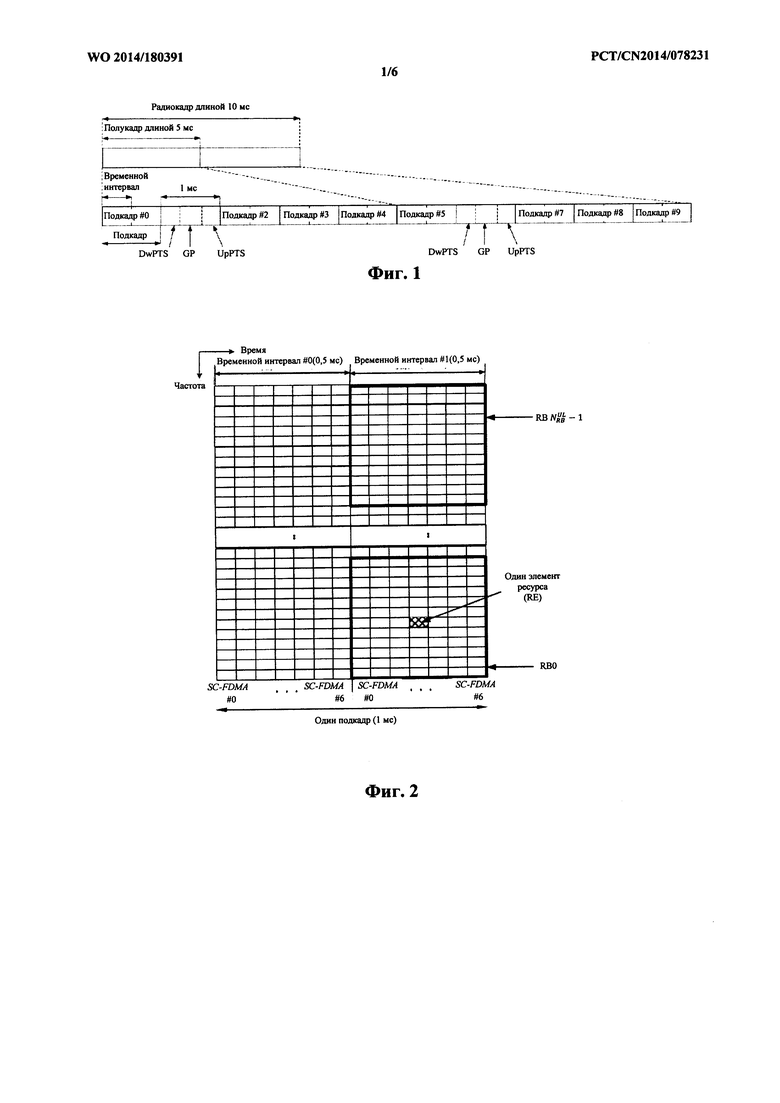
На фиг. 1 показана схематическая диаграмма структуры кадра режима дуплексной связи (TDD) с временным разделением в системе LTE (примечание: структура кадра также называется структурой кадра 2-го типа). В данной структуре кадра радиокадр длиной 10 мс (307200 Ts, 1 мс=30720 Ts) разделяется на два полукадра и длина каждого полукадра составляет 5 мс (153600 Ts). Каждый полукадр содержит 5 подкадров длиной 1 мс и назначение каждого подкадра показано ниже, при этом D обозначает нисходящий подкадр, используемый для передачи нисходящих сигналов, U обозначает восходящий подкадр (или называемый обычным восходящим подкадром), используемый для передачи восходящих сигналов, S обозначает специальный подкадр. Кроме того, один восходящий или нисходящий подкадр содержит два временных интервала длиной 0,5 мс, специальный подкадр содержит три специальных временных интервала, а именно временной интервал нисходящего пилотного сигнала (называемый DwPTS), защитный интервал (называемый GP) и временной интервал восходящего пилотного сигнала (называемый UpPTS).
Распределение ресурсов в системе LTE принимает физический ресурсный блок (PRB или просто ресурсный блок), выполненный как единое целое. Как показано на фиг. 2, один PRB занимает 12 поднесущих (также известных как элементы (RE) ресурса и полоса пропускания каждого RE составляет 15 кГц) в частотной области и занимает один временной интервал во временной области. В случае нормального циклического префикса (называемого нормальным CP), один временной интервал содержит 7 символов SC-FDMA (множественного доступа с частотным разделением на одной несущей); в случае расширенного циклического префикса (расширенного CP), один временной интервал содержит 6 символов SC-FDMA. Если общее количество RB, соответствующих восходящей полосе пропускания системы, в частотной области составляет  , тогда показатели RB равняются 0,1…,
, тогда показатели RB равняются 0,1…,  и показатели RE равняются 0,1…,
и показатели RE равняются 0,1…,  , при этом
, при этом  является количеством поднесущих, соответствующих одному RB в частотной области.
является количеством поднесущих, соответствующих одному RB в частотной области.
Зондирующий опорный сигнал (SRS) используется для измерения восходящего канала для достижения адаптации линии связи и управления мощностью PUSCH (физического восходящего совместно используемого канала).
SRS имеет два типа запуска, соответственно, тип 0 запуска и тип 1 запуска. Тип 0 запуска запускается посредством сигнализации верхнего уровня и поддерживает периодическую передачу SRS. Тип 1 запуска запускается посредством сигнализации физического уровня и поддерживает непериодическую передачу SRS. Базовая станция резервирует некоторые ресурсы для передачи SRS типа 1 запуска. После того, как терминал принимает сигнализацию запуска физического уровня в подкадре n, SRS типа 1 запуска передается в подкадре n+k, при этом k>=4 и n+k является восходящим подкадром, содержащим SRS типа 1 запуска.
Параметры конфигурации ресурсов SRS главным образом включают: параметр временной области, параметр частотной области и параметр кодовой области:
Параметр временной области определяет расположение во временной области SRS, главным образом включая период SRS и смещение подкадра. При этом период соты (т.е. характерный для соты) и смещение подкадра определяют расположение во временной области, в котором SRS может появиться в определенной соте; период терминала (т.е. характерный для UE или характерный для пользовательского оборудования) и смещение подкадра определяют расположение во временной области определенного UE, в котором SRS может появиться в пределах соты. Расположение во временной области характерного для UE SRS определенного UE в пределах соты является поднабором расположения во временной области соты характерного для соты SRS.
В таблице 1 показана конфигурация периода, характерного для соты SRS и смещения подкадра в режиме TDD LTE. В таблице 2 показана конфигурация периода, характерного для UE SRS типа 0 запуска и смещения подкадра в режиме TDD LTE. В таблице 3 показана конфигурация периода, характерного для UE SRS типа 1 запуска и смещения подкадра в режиме TDD LTE.
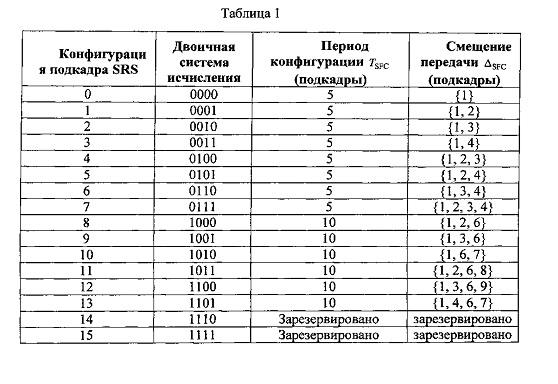
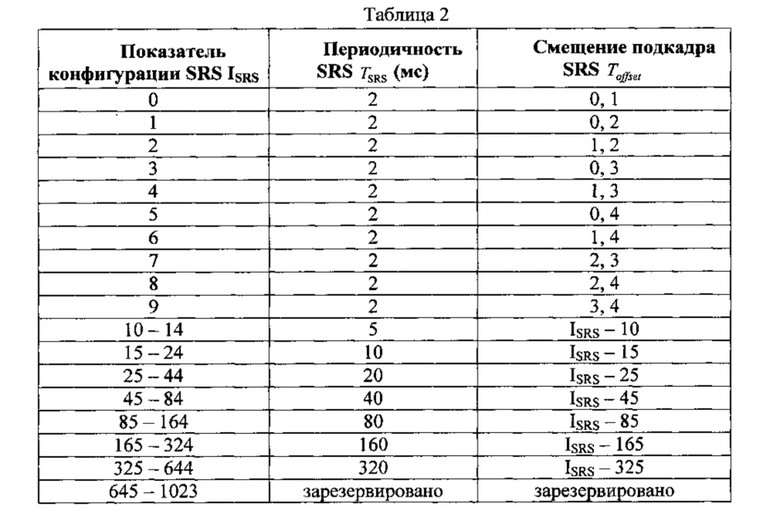
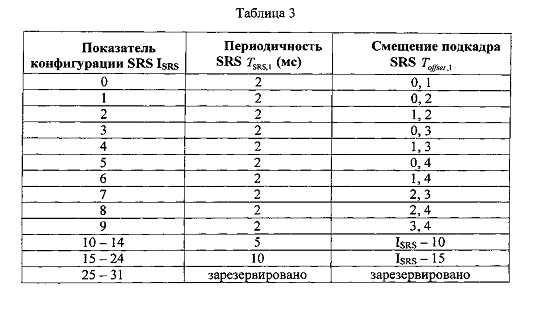
Примечание: в таблице 2 и таблице 3 смещение подкадра SRS, равное 0, 1, 5, 6, указывает на следующее: если два символа SC-FDMA находятся в пределах UpPTS, тогда смещение подкадра, равное 0 или 5, представляет первый символ SC-FDMA UpPTS в первом или втором полукадре, смещение подкадра, равное 1 или 6, представляет второй символ SC-FDMA UpPTS в первом или втором полукадре; если один символ SC-FDMA находится в пределах UpPTS, тогда смещение подкадра, равное 1 или 6, представляет единственный символ SC-FDMA UpPTS в первом или втором полукадре.
- Параметр частотной области определяет расположение в частотной области SRS, главным образом включая относящийся к полосе пропускания SRS параметр конфигурации, начальное расположение в частотной области, конфигурацию гребенки частотной области и параметр скачкообразной перестройки частоты;
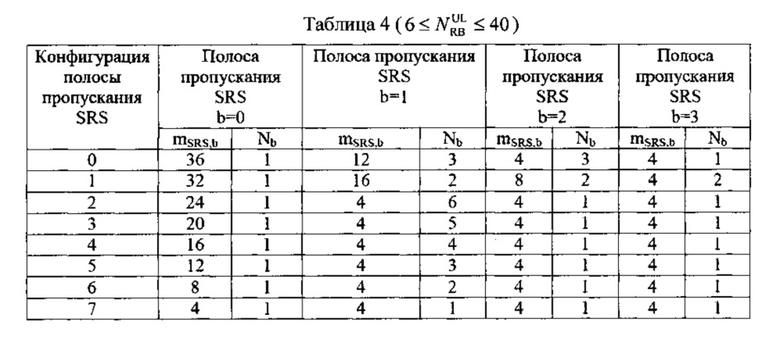
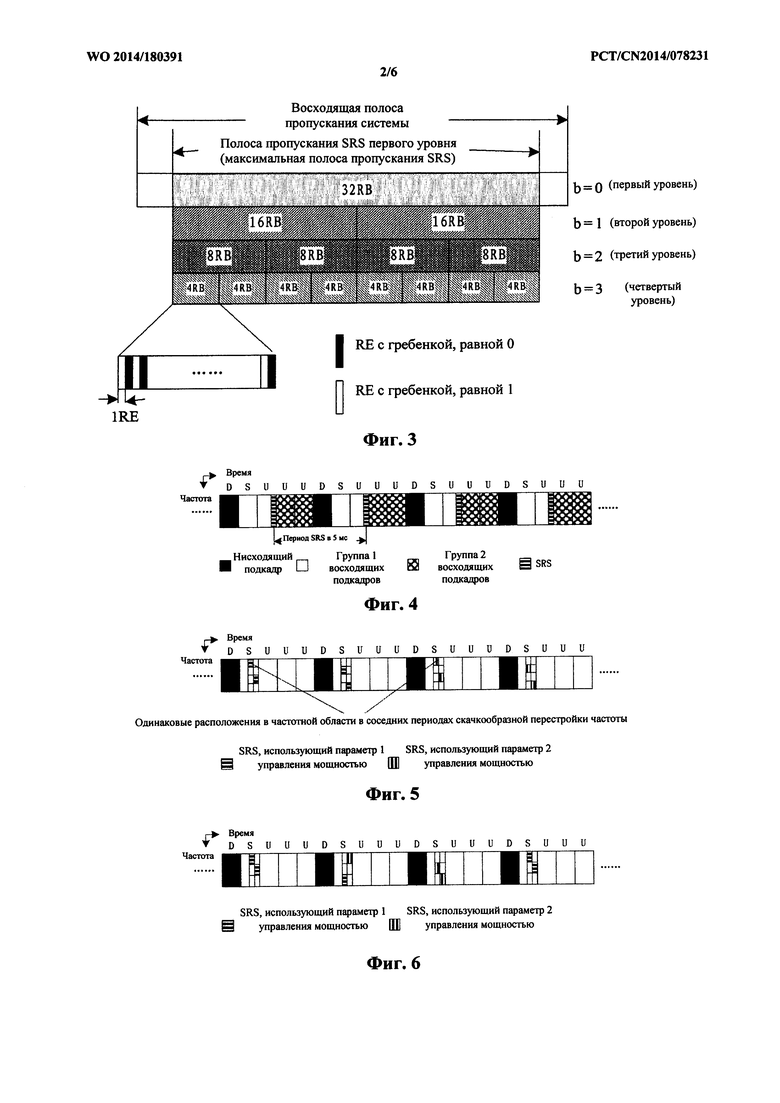
полоса пропускания SRS выполнена в виде древовидной структуры, т.е. каждая конфигурация полосы пропускания SRS соответствует одной древовидной структуре, как показано на фиг. 3. При этом полоса пропускания SRS наивысшего уровня соответствует максимальной полосе пропускания конфигурации полосы пропускания SRS, в таблице 4 показана конфигурация полосы пропускания SRS, если восходящая полоса пропускания системы является  . Возьмем для примера конфигурацию 1 полосы пропускания SRS, показанную в таблице 2, в которой b=0 является первым уровнем и он является наивысшим уровнем древовидной структуры, полоса пропускания SRS уровня является полосой пропускания, соответствующей 32 PRB, и является максимальной полосой пропускания SRS конфигурации полосы пропускания SRS; b=1 является вторым уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей 16 PRB, и одна полоса пропускания SRS первого уровня разделена на две полосы пропускания SRS второго уровня; b=2 является третьим уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей 8 PRB, и одна полоса пропускания SRS второго уровня разделена на две полосы пропускания SRS третьего уровня; b=3 является четвертым уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей четырем PRB, и одна полоса пропускания SRS третьего уровня разделена на две полосы пропускания SRS четвертого уровня. Кроме того, поднесущие сигналов SRS в одной полосе частот SRS расположены с интервалами, как показано на фиг. 3, при этом данная гребенчатая структура позволяет большему количеству пользователей передавать сигналы SRS в одной полосе частот SRS.
. Возьмем для примера конфигурацию 1 полосы пропускания SRS, показанную в таблице 2, в которой b=0 является первым уровнем и он является наивысшим уровнем древовидной структуры, полоса пропускания SRS уровня является полосой пропускания, соответствующей 32 PRB, и является максимальной полосой пропускания SRS конфигурации полосы пропускания SRS; b=1 является вторым уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей 16 PRB, и одна полоса пропускания SRS первого уровня разделена на две полосы пропускания SRS второго уровня; b=2 является третьим уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей 8 PRB, и одна полоса пропускания SRS второго уровня разделена на две полосы пропускания SRS третьего уровня; b=3 является четвертым уровнем, полоса пропускания SRS уровня является полосой пропускания, соответствующей четырем PRB, и одна полоса пропускания SRS третьего уровня разделена на две полосы пропускания SRS четвертого уровня. Кроме того, поднесущие сигналов SRS в одной полосе частот SRS расположены с интервалами, как показано на фиг. 3, при этом данная гребенчатая структура позволяет большему количеству пользователей передавать сигналы SRS в одной полосе частот SRS.
Если распределенная полоса пропускания SRS является относительно небольшой, тогда UE может измерить каналы в более широком диапазоне полосы пропускания посредством скачкообразной перестройки частоты. Возьмем для примера фиг. 3, на которой показано, что, если распределенная полоса пропускания находится во втором уровне (т.е. b=1), а именно, если полоса пропускания SRS составляет 16 RB, в моменты t и t+1 времени передачи SRS, тогда UE может передавать сигналы SRS в левую и правую две полосы пропускания SRS соответственно.
- Параметр кодовой области определяет последовательность, используемую SRS, и ее циклическое смещение.
В LTE R11 и предыдущих системах следующее уравнение приспособлено для вычисления мощности передачи SRS в момент времени i:
 , где
, где
PCMAX,c(i) является максимальной настраиваемой мощностью передачи UE;
PSRS_OFFSET,c(m) является параметром смещения мощности (m=0 является типом 0 запуска и m=1 является типом 1 запуска);
MSRS,c является полосой пропускания SRS;
ƒc(i) является состоянием регулировки управления мощностью текущего PUSCH в соте с на основе команды TPC (управления мощностью передачи). В случае кумулятивного режима, ƒc(i)=ƒc(i-1)+δPUSCH,c(i-KPUSCH) и в случае некумулятивного режима, ƒc(i)=δPUSCH,c(i-KPUSCH)⋅δPUSCH,c(i-KPUSCH) является командой TPC, принятой в момент времени i-KPUSCH.
PO_PUSCH,c(j) и αc(j) являются параметрами управления мощностью открытого контура, используемыми PUSCH; PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c, при этом PO_NOMINAL_PUSCH,c является характерным для соты параметром, настроенным верхним уровнем в соте c, и PO_UE_PUSCH,c является характерным для UE параметром, настроенным верхним уровнем в соте c; j соответствует типу гранта PUSCH, т.е. j=0 является полупостоянным грантом, j=1 является динамическим запланированным грантом и j=2 является ответным грантом произвольного доступа;
PLc является потерей в тракте передачи;
Примечание: см. 36.213 для более подробного объяснения вышеупомянутого уравнения.
Режим TDD R12 LTE представляет технологию динамического подкадра, при этом динамический подкадр гибким образом может менять направление передачи. Если применяется технология динамического подкадра, тогда интенсивности помех, с которыми сталкиваются различные восходящие подкадры (включая фиксированные восходящие подкадры и динамические подкадры), являются различными. Следовательно, необходимо разделить восходящие подкадры на множество групп подкадров и противодействие помехам, с которыми сталкивается каждая группа подкадров, осуществляется посредством настройки канала PUSCH каждой группы подкадров с использованием различных параметров (PO_PUSCH,c(j), αc(j), ƒc(i)) управления мощностью.
Базовой станции должно быть известно об отклонении мощности между SRS и PUSCH, так что мощность приема PUSCH может быть установлена с использованием результата измерения SRS, посредством чего достигается управление мощностью и адаптация линии связи для PUSCH. Поскольку базовой станции неизвестно о потерях в тракте передачи между самой базовой станцией и терминалом, когда PUSCH различных групп подкадров используют различные αc(j), если только один набор параметров управления мощностью настроен для SRS, базовая станция не может оценить показатели мощности приема каналов PUSCH в двух группах подкадров. С другой стороны, состояния (ƒc(i)) регулировки управления мощностью PUSCH различных групп подкадров могут отличаться и команда управления мощностью закрытого контура может быть потеряна, таким образом, базовая станция не может точно знать, сколько команд регулировки управления мощностью терминал уже отправил, в это же время она также должна соответственно передать сигналы SRS на основе состояний регулировки управления мощностью двух групп подкадров.
Таким образом, способ передачи сигналов SRS на основе множества наборов параметров управления мощностью является проблемой, которая должна быть немедленно решена, если необходимо достичь технологии динамического подкадра в режиме TDD LTE. Текущим решением является использование параметров управления мощностью группы подкадров, в которой передается SRS, и недостатки данного способа включают:
(1) если все подкадры в одной группе подкадров могут менять свои направления передачи и используются для нисходящей передачи в некоторый период времени, измерение канала не может быть достигнуто на основе параметров управления мощностью группы подкадров. При наличии восходящих данных восходящая передача не может быть достигнута вовремя в группе подкадров;
(2) как правило, фиксированные восходящие подкадры группируются в одну группу и гибкие подкадры группируются в другую группу. Как показано на фиг.4, в данном случае, если период SRS превышает или равняется 5 мс, тогда во многих случаях не может быть гарантировано, что ресурсы SRS находятся в пределах обеих двух групп подкадров; и, если используется период, равный 2 мс, тогда заголовок SRS будет значительно увеличен.
(3) в режиме TDD LTE UpPTS может быть использован для передачи сигналов SRS для сохранения ресурсов обычного восходящего подкадра для передачи данных. Поскольку UpPTS постоянно используется для восходящей передачи, он зачастую распределяется по определенной группе подкадров. В это же время необходимо распределить ресурсы SRS в восходящих подкадрах, что увеличивает заголовок.
(4) если направления передачи всех подкадров в одной группе подкадров могут быть изменены, тогда необходимо уведомить терминал о направлениях передачи динамических подкадров посредством сигнализации в способе, так что, если динамические подкадры являются восходящими, тогда передается SRS, использующий параметры управления мощностью группы подкадров.
Сущность изобретения
В настоящем изобретении раскрыты способ и система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, которые могут обеспечить усовершенствованное решение проблемы использования множества наборов параметров управления мощностью для передачи сигналов SRS. Конкретное содержимое содержит следующее:
в настоящем изобретении раскрыт способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к терминалу, включающий:
определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS и определение мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью;
передачу терминалом зондирующих опорных сигналов SRS в соответствии с определенной мощностью передачи зондирующих опорных сигналов SRS.
Предпочтительно,
параметры управления мощностью содержат по меньшей мере одно из следующего: PO_PUSCH,c, αc, ƒc, PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c, при этом ƒc является состоянием регулировки управления мощностью текущего PUSCH в соте c на основе команды TPC (управления мощностью передачи); PO_PUSCH,c, PO_NOMINAL_PUSCH,c PO_UE_PUSCH,c и αc являются параметрами управления мощностью, используемыми физическим восходящим совместно используемым каналом PUSCH; PO_NOMINAL_PUSCH,c является характерным для соты параметром; PO_UE_PUSCH,c является характерным для терминала параметром; и PO_PUSCH,c=PO_NOMINAL_PUSCH,c+ PO_UE_PUSCH,c.
Предпочтительно,
указанное определение мощности передачи в соответствии с параметрами управления мощностью содержит одну из следующих переменных или сумму множества следующих переменных: PO_PUSCH,c, αc⋅PLc, ƒc, при этом единицей измерения PO_PUSCH,c является дБм и единицей измерения ƒc и PLc является дБ.
Предпочтительно, ресурсы SRS содержат по меньшей мере одно из следующего: расположения во временной области, расположения в частотной области, гребенки частотной области и циклического сдвига последовательности.
Предпочтительно, определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS включает:
определение терминалом параметров управления мощностью в соответствии с процессами SRS, настроенными базовой станцией, при этом различные процессы SRS включают различные ресурсы SRS и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью.
Предпочтительно, если имеется один процесс SRS, тогда ресурсы SRS, соответствующие процессу SRS, используют одинаковые параметры управления мощностью.
Предпочтительно, если все подкадры для терминала, передающего физический восходящий совместно используемый канал PUSCH, относятся к одной группе подкадров, тогда количество процессов SRS равняется 1.
Предпочтительно, определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS включает:
определение терминалом параметров управления мощностью, используемых в различных расположениях во временной области.
Предпочтительно, если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области между соседними периодами скачкообразной перестройки частоты, отличаются.
Предпочтительно,
в одном периоде скачкообразной перестройки различные параметры управления мощностью используются поочередно между соседними расположениями во временной области, и/или различные параметры управления мощностью используются поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
Предпочтительно, способ применяется, если используются две антенны для прекращения функции выбора антенны.
Предпочтительно, если используются два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны.
Предпочтительно,
в одном периоде скачкообразной перестройки частоты различные параметры управления мощностью поочередно используются между соседними расположениями во временной области, и/или различные параметры управления мощностью поочередно используются в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
Предпочтительно, если используются два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью.
Предпочтительно,
различные антенны используются поочередно между соседними расположениями во временной области в одном периоде скачкообразной перестройки частоты и/или различные антенны используются поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты.
Предпочтительно, определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS включает:
определение терминалом параметров управления мощностью ресурсов SRS в соответствии с указанием сигнализации базовой станции.
Предпочтительно, определение терминалом параметров управления мощностью ресурсов SRS в соответствии с указанием сигнализации базовой станции включает: прием терминалом сигнализации физического уровня от базовой станции, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью.
Предпочтительно, сигнализация физического уровня имеет формат 4 DCI (нисходящей управляющей информации).
Предпочтительно, конфигурации ресурсов SRS содержат по меньшей мере одно из следующего: конфигурации гребенки частотной области, начального показателя физического ресурсного блока, конфигурации смещения подкадра и периода, конфигурации полосы пропускания SRS, конфигурации циклического сдвига последовательности и конфигурации количества портов антенны.
Предпочтительно, ресурсы SRS используются для SRS типа 0 запуска и/или SRS типа 1 запуска.
Предпочтительно, если ресурсы SRS используются для SRS типа 1 запуска, тогда терминал определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
Предпочтительно, определение терминалом расположения во временной области для передачи SRS в соответствии с расположением во временной области сигнализации запуска физического уровня включает: если расположение во временной области сигнализации запуска физического уровня является подкадром n, тогда расположение во временной области для передачи SRS равняется n+k, при этом k≥4 и подкадры n+k являются восходящими подкадрами, содержащими ресурсы SRS.
Предпочтительно,
восходящие подкадры содержат фиксированные восходящие подкадры и/или восходящие подкадры, преобразованные из динамических подкадров, при этом динамические подкадры являются отличными подкадрами в отличных периодах и направлениях передачи, и периоды составляют менее 640 миллисекунд.
Предпочтительно,
терминал использует одинаковые параметры конфигурации мощности во всех ресурсах SRS в соответствии с конфигурацией базовой станции.
Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к базовой станции, включающий: определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS;
прием базовой станцией сигналов SRS в соответствии с параметрами управления мощностью.
Предпочтительно,
параметры управления мощностью содержат по меньшей мере одно из следующего:
PO_PUSCH,c, αc, ƒc, PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c, является состоянием регулировки управления мощностью текущего PUSCH в соте с на основе команды TPC (управления мощностью передачи); PO_PUSCH,c, PO_NOMINAL_PUSCH,c, PO_UE_PUSCH,c и αc являются параметрами управления мощностью, используемыми физическим восходящим совместно используемым каналом PUSCH. PO_NOMINAL_PUSCH,c является характерным для соты параметром; PO_UE_PUSCH,c является характерным для терминала параметром; и PO_PUSCH,c=PO_NOMINAL_PUSCH,c+PO_UE_PUSCH,c.
Предпочтительно,
определение мощности передачи в соответствии с параметрами управления мощностью содержит одну из следующих переменных или сумму множества следующих переменных: PO_PUSCH,c, αc⋅PLc, ƒc при этом единицей измерения PO_PUSCH,c является дБм и единицей измерения ƒc и PLc является дБ.
Предпочтительно, ресурсы SRS содержат по меньшей мере одно из следующего: расположения во временной области, расположения в частотной области, гребенки частотной области и циклического сдвига последовательности.
Предпочтительно, определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS, включает:
настройку базовой станцией процессов SRS для терминала, при этом различные процессы SRS включают различные ресурсы SRS, и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью.
Предпочтительно, если имеется один процесс SRS, тогда ресурсы SRS, соответствующие процессу SRS, используют одинаковые параметры управления мощностью.
Предпочтительно, если все подкадры для терминала, передающего физический восходящий совместно используемый канал PUSCH, относятся к одной группе подкадров, тогда имеется один процесс SRS.
Предпочтительно, определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS, включает:
определение базовой станцией параметров управления мощностью, используемых терминалом в различных расположениях во временной области.
Предпочтительно, если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются.
Предпочтительно,
в одном периоде скачкообразной перестройки частоты различные параметры управления мощностью используются поочередно в соседних расположениях во временной области, и/или различные параметры управления мощностью используются поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
Предпочтительно, способ применяется, если используются две антенны для прекращения функции выбора антенны.
Предпочтительно, если используются два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны.
Предпочтительно,
в одном периоде скачкообразной перестройки частоты различные параметры управления мощностью поочередно используются в соседних расположениях во временной области, и/или различные параметры управления мощностью поочередно используются в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
Предпочтительно, если используются два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью.
Предпочтительно,
различные антенны используются поочередно в соседних расположениях во временной области в одном периоде скачкообразной перестройки частоты и/или различные антенны используются поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты.
Предпочтительно, определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS, включает:
указание базовой станцией терминала для определения параметров управления мощностью ресурсов SRS посредством сигнализации.
Предпочтительно, указание базовой станцией терминала для определения параметров управления мощностью ресурсов SRS посредством сигнализации, включает: передачу базовой станцией сигнализации физического уровня на терминал, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью.
Предпочтительно, сигнализация физического уровня имеет формат 4 DCI (нисходящей управляющей информации).
Предпочтительно,
конфигурации ресурсов SRS содержат по меньшей мере одно из следующего: конфигурации гребенки частотной области, начального показателя физического ресурсного блока, конфигурации смещения подкадра и периода, конфигурации полосы пропускания SRS, конфигурации циклического сдвига и конфигурации количества портов антенны.
Предпочтительно, ресурсы SRS используются для SRS типа 0 запуска и/или SRS типа 1 запуска.
Предпочтительно,
если ресурсы SRS используются для SRS типа 1 запуска, тогда базовая станция определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
Предпочтительно, определение базовой станцией расположения во временной области для передачи SRS на основе расположения во временной области сигнализации запуска физического уровня включает: если расположение во временной области сигнализации запуска физического уровня является подкадром n, тогда расположение во временной области для передачи SRS равняется n+k, при этом k≥4 и подкадры n+k являются восходящими подкадрами, содержащими ресурсы SRS.
Предпочтительно, восходящие подкадры содержат фиксированные восходящие подкадры и/или восходящие подкадры, преобразованные из динамических подкадров, при этом динамические подкадры могут являться отличными подкадрами в отличных периодах и направлениях передачи, и периоды составляют менее 640 миллисекунд.
Предпочтительно,
базовая станция использует одинаковые параметры конфигурации мощности во всех ресурсах SRS в рамках конфигурации сигнализации.
Система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к терминалу, содержащая:
модуль определения параметра управления мощностью, выполненный с возможностью: определения параметров управления мощностью ресурсов зондирующего опорного сигнала SRS;
модуль определения мощности передачи, выполненный с возможностью: определения мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью;
модуль передачи, выполненный с возможностью: передачи зондирующих опорных сигналов SRS в соответствии с определенной мощностью передачи зондирующих опорных сигналов SRS.
Система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к базовой станции, содержащей:
модуль определения параметра управления мощностью, выполненный с возможностью: определения параметров управления мощностью, используемых терминалом в ресурсах SRS;
модуль приема, выполненный с возможностью: приема сигналов SRS в соответствии с параметрами управления мощностью.
Преимущественные эффекты вариантов осуществления настоящего изобретения являются следующими:
(1) повышенная гибкость и возможность увеличения скорости использования восходящих ресурсов. На основе способа, предложенного в настоящем изобретении, SRS, использующий различные параметры управления мощностью, может быть передан в любых восходящих подкадрах (включая фиксированные восходящие подкадры, динамические подкадры и UpPTS) и необязательно, чтобы период SRS был меньше 5 мс. При передаче SRS в UpPTS ресурсы восходящего подкадра могут быть сохранены для передачи данных. Если период SRS превышает 5 мс, заголовок SRS может быть уменьшен;
(2) если направление передачи подкадров меняется, это не влияет на передачу SRS с различными параметрами управления мощностью и соответствующее измерение канала, что гарантирует эффективность адаптации линии связи и управления мощностью PUSCH каждой группы подкадров;
(3) способ, предоставленный в вариантах осуществления настоящего изобретения, поддерживает передачу SRS в фиксированных восходящих подкадрах для различных параметров управления мощностью, таким образом, зависимость от относящейся к направлению передачи подкадров сигнализации является невысокой.
Краткое описание графических материалов
На фиг. 1 показана схематическая диаграмма структуры кадра режима TDD в системе LTE;
На фиг. 2 показана схематическая диаграмма структуры физического ресурсного блока;
На фиг. 3 показана схематическая диаграмма конфигурации частотной области сигнала SRS;
На фиг. 4 показана схематическая диаграмма выполнения традиционного способа, если период SRS равняется 5 мс;
На фиг. 5 показан первый вариант осуществления (количество расположений скачкообразной перестройки частоты равняется 4);
На фиг. 6 показан первый вариант осуществления (количество расположений скачкообразной перестройки частоты равняется 3);
На фиг. 7 показана схематическая диаграмма второго варианта осуществления;
На фиг. 8 показана схематическая диаграмма третьего варианта осуществления;
На фиг. 9 показана схематическая диаграмма четвертого варианта осуществления;
На фиг. 10 показана схематическая диаграмма пятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 3);
На фиг. 11 показана схематическая диаграмма пятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 2);
На фиг. 12 показана схематическая диаграмма пятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 4);
На фиг. 13 показана схематическая диаграмма шестого варианта осуществления;
На фиг. 14 показана схематическая диаграмма седьмого варианта осуществления (SRS типа 0 запуска);
На фиг. 15 показана схематическая диаграмма седьмого варианта осуществления (SRS типа 1 запуска);
На фиг.16 показана схематическая диаграмма восьмого варианта осуществления;
На фиг. 17 показана схематическая диаграмма девятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 3);
На фиг. 18 показана схематическая диаграмма девятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 4);
На фиг. 19 показана схематическая диаграмма десятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 3);
На фиг. 20 показана схематическая диаграмма десятого варианта осуществления (количество расположений скачкообразной перестройки частоты равняется 4);
На фиг. 21 показана блок-схема способа (применяемого к терминалу) в варианте осуществления настоящего изобретения;
На фиг. 22 показана блок-схема способа (применяемого к базовой станции) в варианте осуществления настоящего изобретения;
На фиг. 23 показана блок-диаграмма системы (применяемой к терминалу) в варианте осуществления настоящего изобретения;
На фиг. 24 показана блок-диаграмма системы (применяемой к терминалу) в варианте осуществления настоящего изобретения.
Предпочтительные варианты осуществления изобретения
Далее в данном документе настоящее изобретение будет подробно описано в сочетании с прилагаемыми графическими материалами.
Вариант осуществления способа
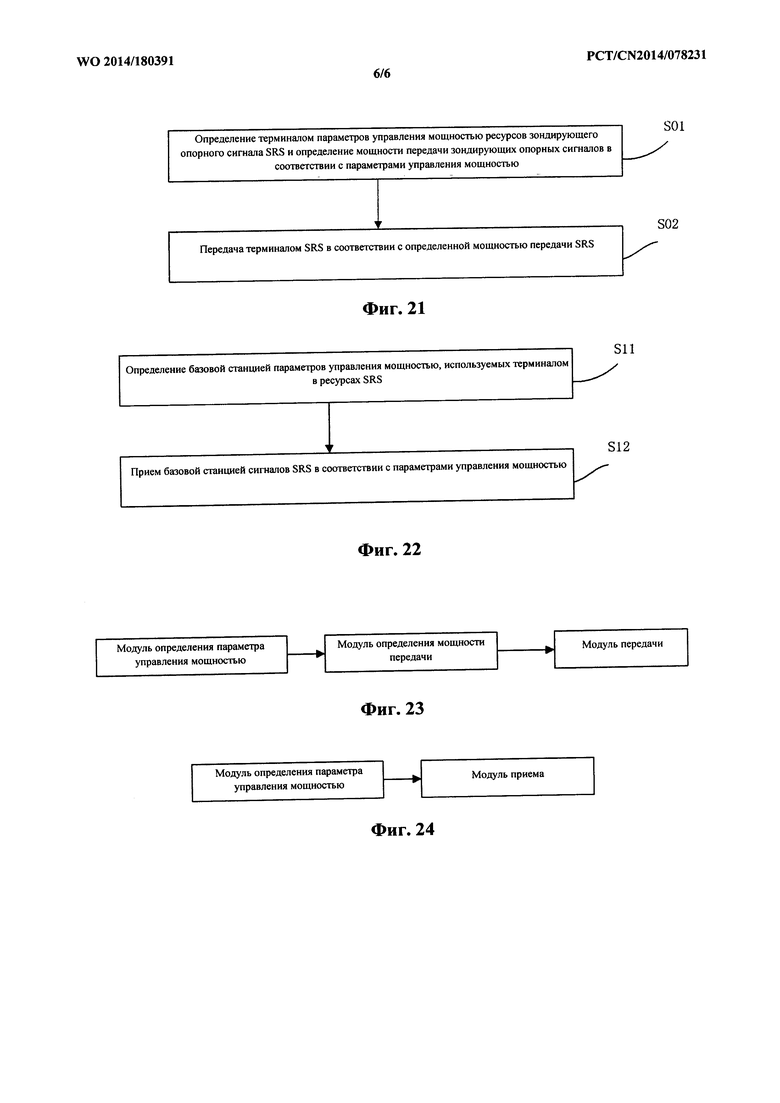
В варианте осуществления настоящего изобретения раскрыт способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, соответственно применяемый к терминалу и базовой станции, как показано на фиг. 21 и фиг. 22:
Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к терминалу, включающий:
S01. Определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS и определение мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью.
S02. Передачу терминалом зондирующих опорных сигналов SRS в соответствии с определенной мощностью передачи зондирующих опорных сигналов SRS.
Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к базовой станции, включающий:
S11. Определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS.
S12. Прием базовой станцией сигналов SRS в соответствии с параметрами управления мощностью.
Первый вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c,αc и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью: 
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Ресурсы SRS относятся к: расположению во временной области и/или расположению в частотной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области и/или расположениях в частотной области. Ресурсы SRS находятся в пределах UpPTS и два символа в пределах одного UpPTS используются для SRS (с периодом в 2 мс) и ресурсы SRS используются для SRS типа 0 запуска.
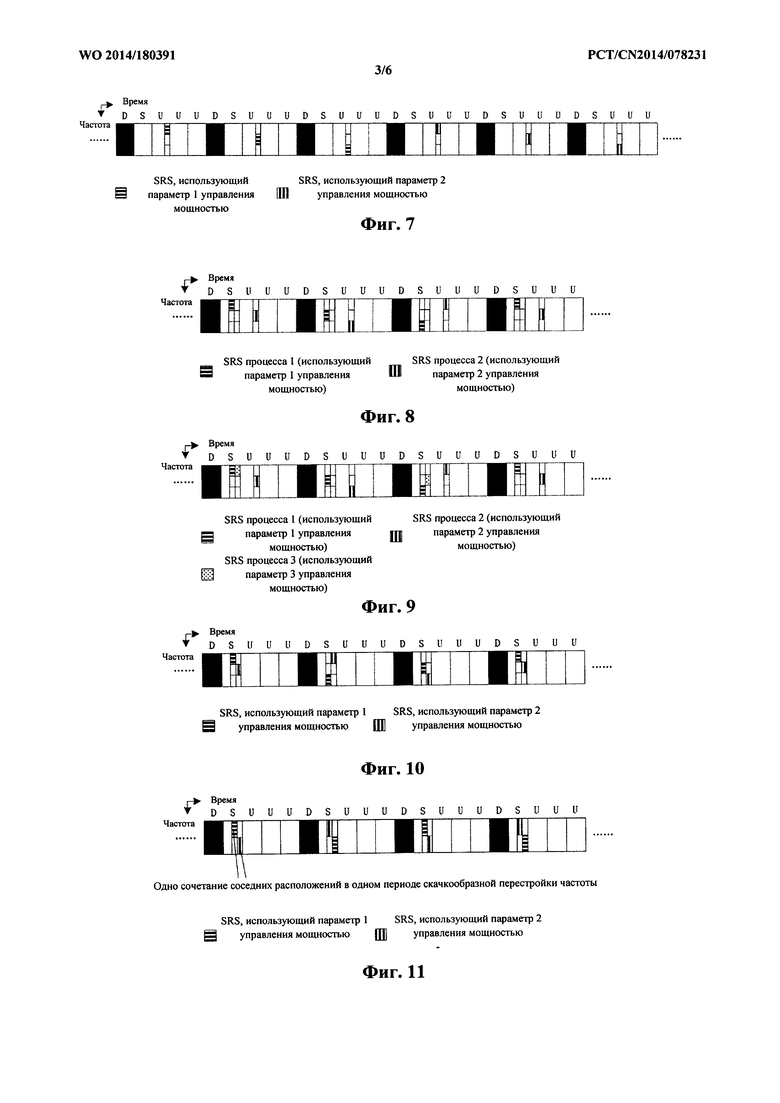
На фиг. 5 показан случай поочередного использования параметров 1 и 2 управления мощностью в каждом периоде скачкообразной перестройки частоты (на фиг. 5 показано 4 символа SC-FDMA в одном периоде скачкообразной перестройки частоты), если имеются 4 расположения скачкообразной перестройки частоты: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются. Одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
На фиг. 6 показан случай поочередного использования параметров 1 и 2 управления мощностью в каждом периоде скачкообразной перестройки частоты (на фиг. 6 показано 3 символа SC-FDMA составляют один период скачкообразной перестройки частоты), если имеются 3 расположения скачкообразной перестройки частоты: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются. Одинаковые параметры управления мощностью используются в каждом расположении во временной области в пределах одного периода скачкообразной перестройки частоты.
Второй вариант осуществления
Один параметр управления мощностью состоит из αc и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Ресурсы SRS относятся к: расположению во временной области и/или расположению в частотной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области и/или расположениях в частотной области.
Предполагается, что SRS типа 0 запуска передается в подкадрах 2 и 7.
На фиг. 7 показан случай поочередного использования параметров 1 и 2 управления мощностью в каждом периоде скачкообразной перестройки частоты, если имеются 3 расположения скачкообразной перестройки частоты: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются. Одинаковые параметры управления мощностью используются в каждом расположении во временной области в одном периоде скачкообразной перестройки частоты.
Третий вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и αc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Настраивают 2 процесса SRS. Расположения во временной области двух процессов SRS отличаются (отдельно настроены посредством смещения подкадра и периода) и расположения в частотной области отличаются (отдельно настроены посредством начального PRB в частотной области и/или параметров скачкообразной перестройки частоты).
Как показано на фиг. 8, в случае SRS типа 0 запуска предполагается, что период процесса 1 составляет 5 мс и смещение подкадра равняется 0; период процесса 2 составляет 5 мс и смещение подкадра равняется 2; процесс 1 использует параметр 1 управления мощностью и процесс 2 использует параметр 2 управления мощностью.
Кроме того, процессы 1 и 2 могут также использовать различные гребенки частотной области, например, процесс 1 использует конфигурацию 0 гребенки частотной области и процесс 2 использует конфигурацию 1 гребенки частотной области; процессы 1 и 2 могут также использовать различные циклические сдвиги, например, процесс 1 использует циклический сдвиг 0 и процесс 2 использует циклический сдвиг 4.
Четвертый вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и αc. Всего имеется три параметра управления мощностью, соответственно, параметр 1 управления мощностью:  , параметр 2 управления мощностью:
, параметр 2 управления мощностью:  ; и параметр 3 управления мощностью:
; и параметр 3 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  ,
,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Настраивают 3 процесса SRS. Расположения во временной области трех процессов SRS отличаются (отдельно настроены посредством смещения подкадра и периода).
Как показано на фиг. 9, в случае SRS типа 0 запуска предполагается, что период процесса 1 составляет 5 мс и смещение подкадра равняется 0; период процесса 2 составляет 5 мс и смещение подкадра равняется 2; период процесса 3 составляет 10 мс и смещение подкадра равняется 1; процессы 1, 2 и 3 соответственно используют параметры 1, 2 и 3 управления мощностью.
Пятый вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Ресурсы SRS относятся к: расположению во временной области и/или расположению в частотной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области и/или расположениях в частотной области.
Предполагается, что SRS типа 0 запуска передается в UpPTS и два символа в пределах одного UpPTS используются для SRS (с периодом в 2 мс).
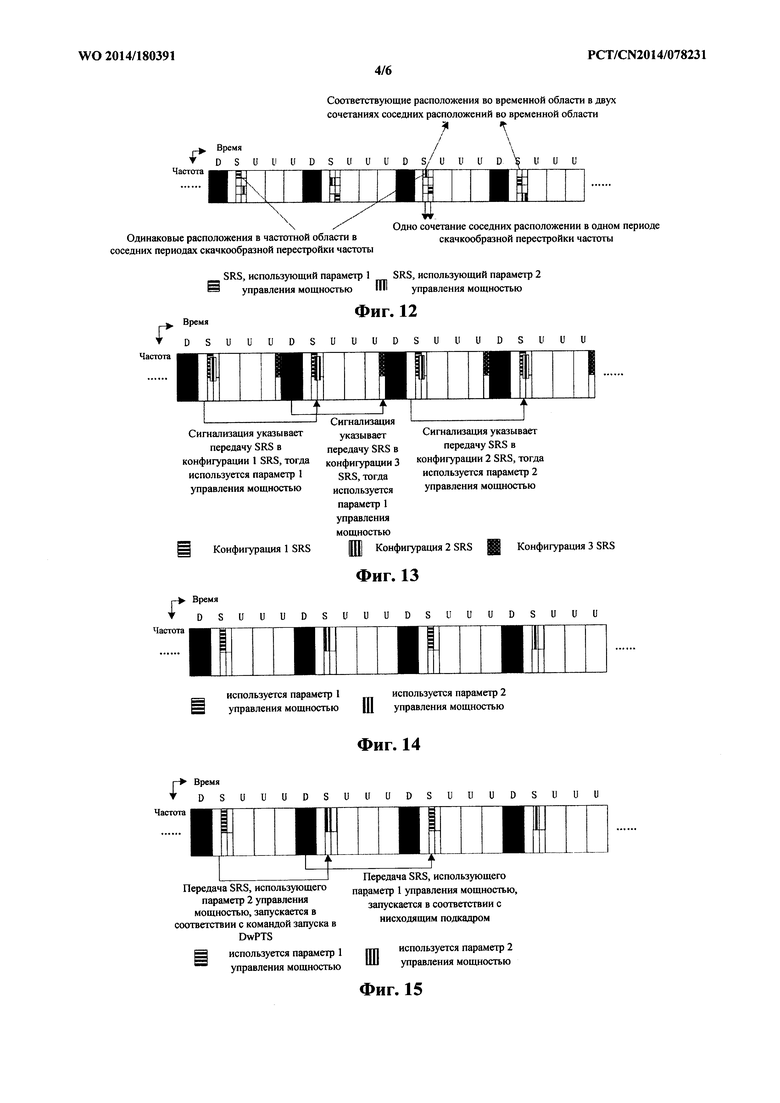
На фиг. 10 показан случай использования различных параметров управления мощностью в соседние моменты времени передачи SRS, если имеются 3 расположения скачкообразной перестройки в частотной области: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; в пределах одного периода скачкообразной перестройки частоты различные параметры управления мощностью используются поочередно между соседними расположениями во временной области.
На фиг. 11 показан случай поочередного использования одинаковых или различных параметров управления мощностью в соседние моменты времени передачи SRS, если имеются 2 расположения скачкообразной перестройки в частотной области: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области между соседними периодами скачкообразной перестройки частоты, отличаются; различные параметры управления мощностью поочередно используются между соседними расположениями во временной области в одном периоде скачкообразной перестройки частоты. Это также эквивалентно: различным параметрам управления мощностью, поочередно использующимся в соответствующих расположениях во временной области в сочетаниях двух соседних расположений во временной области в пределах одного периода скачкообразной перестройки частоты (количество сочетаний соседних расположений в пределах одного периода скачкообразной перестройки частоты равняется 1).
На фиг. 12 показан случай поочередного использования одинаковых или различных параметров управления мощностью в соседние моменты времени передачи SRS, если имеются четыре расположения скачкообразной перестройки в частотной области: параметры управления мощностью, используемые терминалом в одних расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; в пределах одного периода скачкообразной перестройки частоты различные параметры управления мощностью поочередно используются в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в пределах одного периода скачкообразной перестройки частоты (количество сочетаний соседних расположений в пределах одного периода скачкообразной перестройки частоты равняется 2).
Шестой вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Определение параметров управления мощностью, используемых ресурсами SRS в соответствии с указанием сигнализации, может быть специально реализовано посредством:
настройки базовой станцией терминала с использованием 3 конфигураций SRS, соответственно:
конфигурации 1 SRS: конфигурация гребенки частотной области равняется 0; показатель начального физического ресурсного блока равняется 0; конфигурация смещения подкадра и периода равняется 10 (см. таблицу 3, период составляет 5 мс и конфигурация подкадра равняется 0);
конфигурации 2 SRS: конфигурация гребенки частотной области равняется 1; показатель начального физического ресурсного блока равняется 0; конфигурация смещения подкадра и периода равняется 10 (см. таблицу 3, период составляет 5 мс и конфигурация подкадра равняется 0);
конфигурации 3 SRS: конфигурация гребенки частотной области равняется 0; показатель начального физического ресурсного блока равняется 0; конфигурация смещения подкадра и периода равняется 14 (см. таблицу 3, период составляет 5 мс и конфигурация подкадра равняется 4);
конфигурация полосы пропускания SRS, конфигурация циклического сдвига и конфигурация количества портов антенны трех конфигураций SRS являются одинаковыми.
Конфигурации 1 и 3 SRS соответствуют параметру 1 управления мощностью; конфигурация 2 SRS соответствует параметру 2 управления мощностью.
Как показано на фиг.13, если сигнализация указывает передачу конфигураций 1 и 3 SRS, параметр 1 управления мощностью используется для передачи SRS; если сигнализация указывает передачу конфигурации 2 SRS, параметр 2 управления мощностью используется для передачи SRS;
зависимость синхронизации между сигнализацией и расположением передачи SRS является следующей: расположение во временной области сигнализации является подкадром n, тогда расположение во временной области для передачи SRS равняется n+k, где k>=4 и подкадры n+k являются восходящими подкадрами, содержащими конкретные ресурсы конфигурации SRS.
Седьмой вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c, αc и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Ресурсы SRS относятся к: расположению во временной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области.
Ресурсы SRS находятся в пределах UpPTS и период составляет 5 мс, первый символ в пределах UpPTS используется для SRS и ресурсы SRS используются для SRS типа 1 запуска или SRS типа 0 запуска.
На фиг. 14 показан случай поочередного использования параметров 1 и 2 управления мощностью в каждом положении во временной области для SRS типа 0 запуска.
На фиг. 15 показан случай поочередного использования параметров 1 и 2 управления мощностью в каждом возможном расположении во временной области для SRS типа 1 запуска. При этом зависимость синхронизации между командой запуска SRS типа 1 запуска и фактическим расположением передачи SRS является следующей: расположение во временной области сигнализации является подкадром n, расположение во временной области для передачи SRS равняется n+k, где k>=4 и подкадры n+k являются восходящими подкадрами, содержащими конкретные ресурсы конфигурации SRS.
Восьмой вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и αc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Настраивают 2 процесса SRS. Расположения во временной области двух процессов SRS отличаются (отдельно настроены посредством смещения подкадра и периода).
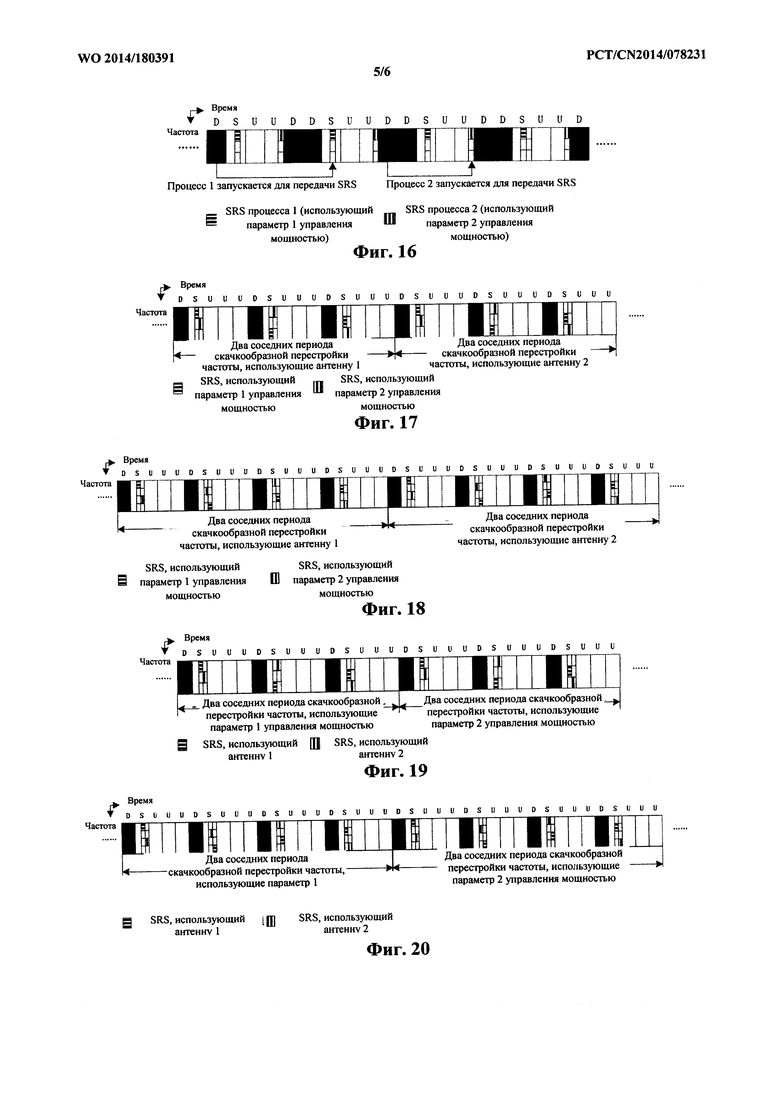
Как показано на фиг. 16, в случае SRS типа 1 запуска предполагается, что период процесса 1 составляет 5 мс и смещение подкадра равняется 0; период процесса 2 составляет 5 мс и смещение подкадра равняется 3; процесс 1 использует параметр 1 управления мощностью и процесс 2 использует параметр 2 управления мощностью. При этом зависимость синхронизации между командой запуска SRS типа 1 запуска и фактическим расположением передачи SRS является следующей: расположение во временной области сигнализации является подкадром n, расположение во временной области для передачи SRS равняется n+k, где k>=4 и подкадры n+k являются восходящими подкадрами, содержащими ресурсы SRS (это могут быть ресурсы SRS процесса 1 или процесса 2).
Кроме того, процессы 1 и 2 могут также использовать различные гребенки частотной области, например, процесс 1 использует конфигурацию 0 гребенки частотной области и процесс 2 использует конфигурацию 1 гребенки частотной области; процессы 1 и 2 могут также использовать различные циклические сдвиги, например, процесс 1 использует циклический сдвиг 0 и процесс 2 использует циклический сдвиг 4; процессы 1 и 2 могут также использовать различные расположения в частотной области (отдельно настроенные посредством начального PRB в частотной области и/или параметра скачкообразной перестройки частоты); процессы 1 и 2 могут также использовать различные полосы пропускания.
Девятый вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c, и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Ресурсы SRS относятся к: расположению во временной области и/или расположению в частотной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области и/или расположениях в частотной области.
Предполагается, что SRS типа 0 запуска передается в пределах UpPTS и два символа в пределах одного UpPTS используются для SRS (с периодом в 2 мс).
Две антенны используются для запуска функции выбора антенны.
На фиг. 17 показан случай, в котором после поочередного использования двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одной антенны, если имеются три расположения скачкообразной перестройки в частотной области, терминал поочередно использует параметры управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны. В пределах одного периода скачкообразной перестройки частоты различные параметры управления мощностью поочередно используются между соседними расположениями во временной области.
На фиг. 18 показан случай, в котором после поочередного использования двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одной антенны, если имеются четыре расположения скачкообразной перестройки в частотной области, терминал поочередно использует параметры управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны. В пределах одного периода скачкообразной перестройки частоты различные параметры управления мощностью поочередно используются в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в пределах одного периода скачкообразной перестройки частоты.
Десятый вариант осуществления
Один параметр управления мощностью состоит из PO_PUSCH,c и ƒc. Всего имеется два параметра управления мощностью, соответственно, параметр 1 управления мощностью:  и параметр 2 управления мощностью:
и параметр 2 управления мощностью:  .
.
Примечание: PO_PUSCH,c состоит из двух частей: PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c. Следовательно,  и
и  могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
могут иметь различный PO_NOMINAL_PUSCH,c, или различный PO_UE_PUSCH,c, или различные PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c.
Ресурсы SRS относятся к: расположению во временной области и/или расположению в частотной области. Различные ресурсы SRS, использующие различные параметры управления мощностью, относятся к использованию различных параметров управления мощностью в различных расположениях во временной области и/или расположениях в частотной области.
Предполагается, что SRS типа 0 запуска передается в пределах UpPTS и два символа в пределах одного UpPTS используются для SRS (с периодом в 2 мс).
Две антенны используются для запуска функции выбора антенны.
На фиг. 19 показан случай, в котором, если имеются три расположения скачкообразной перестройки в частотной области, после поочередного использования двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие два соседние периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью. Различные антенны поочередно используются между соседними расположениями во временной области в пределах одного периода скачкообразной перестройки частоты.
На фиг. 20 показан случай, в котором, если имеются четыре расположения скачкообразной перестройки в частотной области, после поочередного использования двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие два соседние периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью. Различные антенны поочередно используются в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в пределах одного периода скачкообразной перестройки частоты, (в данном случае количество сочетаний соседних расположений в пределах одного периода скачкообразной перестройки частоты равняется 2).
Вариант осуществления устройства
В варианте осуществления настоящего изобретения раскрыта система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к терминалу и базовой станции, как показано на фиг. 23 и фиг. 24:
система настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к терминалу, содержащая:
модуль определения параметра управления мощностью, используемый для определения параметров управления мощностью ресурсов зондирующего опорного сигнала SRS;
модуль определения мощности передачи, используемый для определения мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью;
модуль передачи, используемый для передачи зондирующих опорных сигналов SRS в соответствии с определенной мощностью передачи зондирующих опорных сигналов SRS.
Система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к базовой станции, содержащая:
модуль определения параметра управления мощностью, используемый для определения параметров управления мощностью, используемых терминалом в ресурсах SRS;
модуль приема, используемый для приема сигналов SRS в соответствии с параметрами управления мощностью.
Вышеизложенное описание представляет собой лишь предпочтительные варианты осуществления настоящего изобретения и не предназначено для ограничения настоящего документа. Специалистам в данной области техники будет понятно, что настоящее изобретение может иметь различные модификации и изменения. Любые модификации, равнозначные замены и улучшения, выполненные в рамках идеи и сущности настоящего изобретения, должны быть включены в объем правовой защиты настоящего изобретения.
Промышленная применимость
Преимущественные эффекты вариантов осуществления настоящего изобретения являются следующими:
(1) повышенная гибкость и возможность увеличения скорости использования восходящих ресурсов режима TDD. На основе способа, предложенного в настоящем изобретении, SRS, использующий различные параметры управления мощностью, может быть передан в любых восходящих подкадрах (включая фиксированные восходящие подкадры, динамические подкадры и UpPTS) и необязательно, чтобы период SRS был меньше 5 мс. При передаче SRS в UpPTS ресурсы восходящего подкадра могут быть сохранены для передачи данных. Если период SRS превышает 5 мс, заголовок SRS может быть уменьшен;
(2) если направление передачи подкадров меняется, это не влияет на передачу SRS с различными параметрами управления мощностью и соответствующее измерение канала, что гарантирует эффективность адаптации линии связи и управления мощностью PUSCH каждой группы подкадров;
(3) способ, предоставленный в вариантах осуществления настоящего изобретения, поддерживает передачу SRS в фиксированных восходящих подкадрах для различных параметров управления мощностью, таким образом, зависимость от относящейся к направлению передачи подкадров сигнализации является невысокой.
Изобретение относится к области связи. Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением применяется к терминалу и системе и включает: определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS и определение мощности передачи зондирующих опорных сигналов на основе параметров управления мощностью; передачу терминалом зондирующих опорных сигналов SRS на основе определенной мощности передачи зондирующих опорных сигналов SRS; определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS; прием базовой станцией сигналов SRS на основе параметров управления мощностью. В варианте осуществления настоящего изобретения также раскрыта система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, которая соответствует вышеупомянутому способу. В варианте осуществления настоящего изобретения гибкость является удовлетворительной и скорость использования восходящих ресурсов режима TDD может быть увеличена. 4 н. и 20 з.п. ф-лы, 4 табл., 24 ил.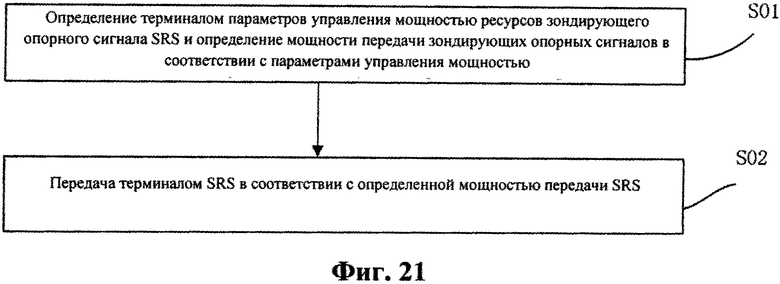
1. Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к терминалу, включающий:
определение терминалом параметров управления мощностью ресурсов зондирующего опорного сигнала SRS и определение мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью;
передачу терминалом SRS в соответствии с определенной мощностью передачи SRS;
при этом определение терминалом параметров управления мощностью ресурсов SRS включает:
определение терминалом параметров управления мощностью в соответствии с процессами SRS, настроенными базовой станцией, где различные процессы SRS включают различные ресурсы SRS и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью; или
если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседних двух периодах скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью; или
прием терминалом сигнализации физического уровня от базовой станции, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью; или
если ресурсы SRS используют для SRS типа 1 запуска, тогда терминал определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
2. Способ по п. 1, где
параметры управления мощностью содержат по меньшей мере одно из следующего:
PO_PUSCH,c, αc, ƒc, PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c, ƒc является состоянием регулировки управления мощностью текущего PUSCH в соте с на основе команды ТРС (управления мощностью передачи); PO_PUSCH,c, PO_NOMINAL,PUSCH,c, PO_UE_PUSCH,c и αс являются параметрами управления мощностью, используемыми физическим восходящим совместно используемым каналом PUSCH; PO_NOMINAL_PUSCH,с является характерным для соты параметром; PO_UE_PUSCH,c является характерным для терминала параметром; и PO_PUSCH,c=PO_NOMINAL_PUSCH,c+PO_UE_PUSCH,c.
3. Способ по п. 1 или 2, где
указанное определение мощности передачи в соответствии с параметрами управления мощностью содержит одну из следующих переменных или сумму множества следующих переменных: PO_PUSCH,с, αс⋅PLc, ƒc, где единицей измерения PO_PUSCH,c является дБм и единицей измерения ƒc и PLc является дБ.
4. Способ по п. 1, где ресурсы SRS содержат по меньшей мере одно из следующего: расположения во временной области, расположения в частотной области, гребенки частотной области и циклического сдвига последовательности.
5. Способ по п. 1, где, если имеется один процесс SRS, тогда ресурсы SRS, соответствующие процессу SRS, используют одинаковые параметры управления мощностью.
6. Способ по п. 5, где, если все подкадры для терминала, передающего физический восходящий совместно используемый канал PUSCH, относятся к одной группе подкадров, тогда количество процессов SRS равняется 1.
7. Способ по п. 1, где
в одном периоде скачкообразной перестройки частоты различные параметры управления мощностью используют поочередно между соседними расположениями во временной области, и/или различные параметры управления мощностью используют поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используют в каждом расположении во временной области в одном периоде скачкообразной перестройки частоты.
8. Способ по п. 1, где сигнализация физического уровня имеет формат 4 DCI (нисходящей управляющей информации).
9. Способ по п. 1, где конфигурации ресурсов SRS содержат по меньшей мере одно из следующего: конфигурации гребенки частотной области, начального показателя физического ресурсного блока, конфигурации смещения подкадра и периода, конфигурации полосы пропускания SRS, конфигурации циклического сдвига последовательности и конфигурации количества портов антенны.
10. Способ по п. 1, где определение терминалом расположения во временной области для передачи SRS в соответствии с расположением во временной области сигнализации запуска физического уровня включает:
если расположение во временной области сигнализации запуска физического уровня является подкадром n, тогда расположение во временной области для передачи SRS равняется n+k, где k>4 и подкадры n+k являются восходящими подкадрами, содержащими ресурсы SRS.
11. Способ по п. 10, где
восходящие подкадры содержат фиксированные восходящие подкадры и/или восходящие подкадры, преобразованные из динамических подкадров, и динамические подкадры являются подкадрами с отличными периодами и направлениями передачи, и периоды составляют менее 640 миллисекунд.
12. Способ настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемый к базовой станции, включающий:
определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS;
прием базовой станцией сигналов SRS в соответствии с параметрами управления мощностью;
при этом определение базовой станцией параметров управления мощностью, используемых терминалом в ресурсах SRS, включает:
настройку базовой станцией процессов SRS для терминала, где различные процессы SRS включают различные ресурсы SRS и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью; или
если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседних двух периодах скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью; или
передачу базовой станцией сигнализации физического уровня на терминал, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью; или
если ресурсы SRS используют для SRS типа 1 запуска, тогда базовая станция определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
13. Способ по п. 12, где
параметры управления мощностью содержат по меньшей мере одно из следующего:
PO_PUSCH,c, αc, ƒc, PO_NOMINAL_PUSCH,c и PO_UE_PUSCH,c, где ƒc является состоянием регулировки управления мощностью текущего PUSCH в соте с на основе команды ТРС (управления мощностью передачи); PO_PUSCH,c, PO_NOMINAL_PUSCH,c,PO_UE_PUSCH,c и αc являются параметрами управления мощностью, используемыми физическим восходящим совместно используемым каналом PUSCH; PO_NOMINAL_PUSCH,c является характерным для соты параметром; PO_UE_PUSCH,c является характерным для терминала параметром; и PO_PUSCH,c=PO_NOMINAL_PUSCH,c+PO_UE_PUSCH,c.
14. Способ по п. 12 или 13, где
определение мощности передачи в соответствии с параметрами управления мощностью содержит одну из следующих переменных или сумму множества следующих переменных: PO_PUSCH,c, αс⋅PLc, ƒc, где единицей измерения PO_PUSCH,c является дБм и единицей измерения ƒc и PLc является дБ.
15. Способ по п. 12, где ресурсы SRS содержат по меньшей мере одно из следующего: расположения во временной области, расположения в частотной области, гребенки частотной области и циклического сдвига последовательности.
16. Способ по п. 12, где, если имеется один процесс SRS, тогда ресурсы SRS, соответствующие процессу SRS, используют одинаковые параметры управления мощностью.
17. Способ по п. 16, где, если все подкадры для терминала, передающего физический восходящий совместно используемый канал PUSCH, относятся к одной группе подкадров, тогда имеется один процесс SRS.
18. Способ по п. 15, где
в одном периоде скачкообразной перестройки частоты различные параметры управления мощностью используют поочередно в соседних расположениях во временной области, и/или различные параметры управления мощностью используют поочередно в соответствующих расположениях во временной области в сочетаниях соседних двух расположений во временной области в одном периоде скачкообразной перестройки частоты, и/или одинаковые параметры управления мощностью используют в каждом расположении во временной области в одном периоде скачкообразной перестройки частоты.
19. Способ по п. 12, где
сигнализация физического уровня имеет формат 4 DCI (нисходящей управляющей информации).
20. Способ по п. 12, где
конфигурации ресурсов SRS содержат по меньшей мере одно из следующего: конфигурации гребенки частотной области, начального показателя физического ресурсного блока, конфигурации смещения подкадра и периода, конфигурации полосы пропускания SRS, конфигурации циклического сдвига и конфигурации количества портов антенны.
21. Способ по п. 12, где определение базовой станцией расположения во временной области для передачи SRS в соответствии с расположением во временной области сигнализации запуска физического уровня включает:
если расположение во временной области сигнализации запуска физического уровня является подкадром n, тогда расположение во временной области для передачи SRS равняется n+k, где k≥4 и подкадры n+k являются восходящими подкадрами, содержащими ресурсы SRS.
22. Способ по п. 21, где восходящие подкадры содержат фиксированные восходящие подкадры и/или восходящие подкадры, преобразованные из динамических подкадров, и динамические подкадры могут являться подкадрами в различных периодах и направлениях передачи, и периоды составляют менее 640 миллисекунд.
23. Система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к терминалу, содержащая:
модуль определения параметра управления мощностью, выполненный с возможностью: определения параметров управления мощностью ресурсов зондирующего опорного сигнала SRS;
модуль определения мощности передачи, выполненный с возможностью: определения мощности передачи зондирующих опорных сигналов в соответствии с параметрами управления мощностью;
модуль передачи, выполненный с возможностью: передачи SRS в соответствии с определенной мощностью передачи SRS;
при этом определение параметров управления мощностью ресурсов SRS модулем определения параметра управления мощностью включает:
определение параметров управления мощностью в соответствии с процессами SRS, настроенными базовой станцией, где различные процессы SRS включают различные ресурсы SRS и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью; или
если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседних двух периодах скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью; или
прием терминалом сигнализации физического уровня от базовой станции, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью; или
если ресурсы SRS используют для SRS типа 1 запуска, тогда терминал определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
24. Система для настройки параметров управления мощностью зондирующих опорных сигналов в системе дуплексной связи с временным разделением, применяемая к базовой станции, содержащая:
модуль определения параметра управления мощностью, выполненный с возможностью: определения параметров управления мощностью, используемых терминалом в ресурсах SRS;
модуль приема, выполненный с возможностью: приема сигналов SRS в соответствии с параметрами управления мощностью;
при этом определение параметров управления мощностью, используемых терминалом в ресурсах SRS, модулем определения параметра управления мощностью включает:
настройку базовой станцией процессов SRS для терминала, где различные процессы SRS включают различные ресурсы SRS и различные ресурсы SRS или различные процессы SRS соответствуют различным параметрам управления мощностью; или
если имеются два параметра управления мощностью, тогда параметры управления мощностью, используемые терминалом в одних и тех же расположениях в частотной области в соседних периодах скачкообразной перестройки частоты, отличаются; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух параметров управления мощностью для передачи SRS в одних расположениях в частотной области в соседних двух периодах скачкообразной перестройки частоты посредством использования одной антенны, терминал поочередно использует два параметра управления мощностью для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другой антенны; или
если используют два параметра управления мощностью и две антенны для запуска функции выбора антенны, тогда после поочередного использования терминалом двух антенн для передачи SRS в одних расположениях в частотной области в соседние два периода скачкообразной перестройки частоты посредством использования одного параметра управления мощностью, терминал поочередно использует две антенны для передачи SRS в одних расположениях в частотной области в другие соседние два периода скачкообразной перестройки частоты посредством использования другого параметра управления мощностью; или
передачу базовой станцией сигнализации физического уровня на терминал, если сигнализация указывает конфигурацию ресурсов SRS, используемую терминалом, определение терминалом параметров управления мощностью, соответствующих конфигурации ресурсов SRS, в соответствии с взаимоотношением между конфигурациями ресурсов SRS и параметрами управления мощностью; или
если ресурсы SRS используют для SRS типа 1 запуска, тогда базовая станция определяет расположение во временной области для передачи SRS и соответствующих параметров управления мощностью в соответствии с расположением во временной области сигнализации запуска физического уровня.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ МОЩНОСТЬЮ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В БЕСПРОВОДНОЙ СВЯЗИ | 2008 |
|
RU2430469C2 |
| RU 2009119387 A1, 20.12.2010 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 103327594 A, 25.09.2013. | |||

