Область техники
[1] Настоящее изобретение относится к системе беспроводной связи и, более конкретно, к способу для измерения расстояния между устройствами через прямую связь устройство-устройство в системе беспроводной связи и соответствующему прибору.
Уровень техники
[2] В качестве иллюстративного примера системы беспроводной связи настоящего изобретения далее будут подробно описаны системы связи стандарта "Долгосрочное развитие сетей связи" партнерского проекта по системам 3-го поколения (LTE 3GPP) и стандарта Усовершенствованная технология LTE (LTE-A).
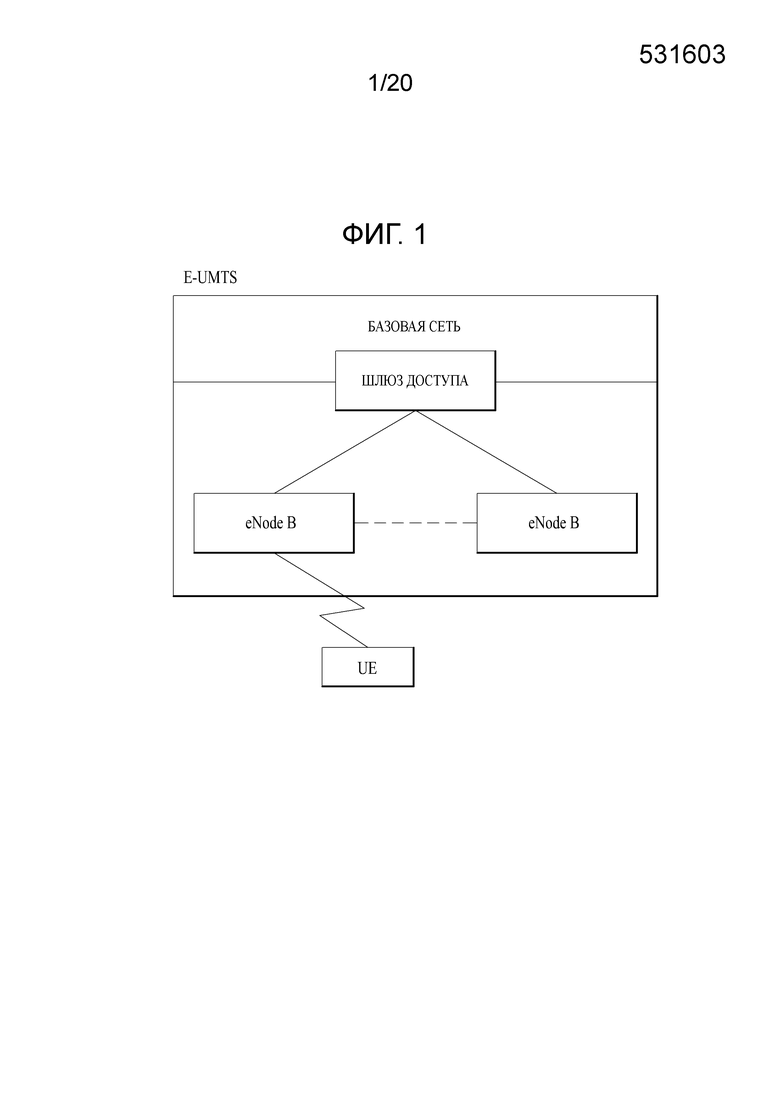
[3] Фиг. 1 является концептуальной схемой, изображающей сетевую структуру развитой универсальной системы мобильной связи (E-UMTS) в качестве иллюстративной системы мобильной связи. В частности, развитая универсальная система мобильной связи (E-UMTS) возникла из прежней системы UMTS, и ее основная стандартизация теперь проводится партнерским проектом по системам 3-го поколения (3GPP). E-UMTS может также называться стандартом "Долгосрочное развитие сетей связи" (LTE). Для получения подробной информации о технических спецификациях UMTS и E-UMTS см. Релиз 7 и Релиз 8 “Партнерского проекта по системам 3-го поколения; группа по техническим спецификациям сетей радиодоступа”.
[4] Как показано на фиг. 1, система E-UMTS в общем состоит из пользовательского оборудования (UE) 120, базовых станций (или eNode-B) 110a и 110b и шлюза доступа (AG), который расположен в конце сети (E-UTRAN) и соединен с внешней сетью. Как правило, eNode-B может одновременно передавать множество потоков данных для услуги широковещательной передачи, услуги многоадресной передачи и/или услуги одноадресной передачи.
[5] Каждый eNode-B включает в себя одну или несколько сот. Одна сота eNode-B задана, чтобы использовать ширину полосы частот, такую как, например, 1.25, 2.5, 5, 10, 15 или 20 МГц, для обеспечения услуги передачи по нисходящей линии связи или восходящей линии связи для пользовательского оборудования (UE). Здесь различные соты могут задаваться, чтобы использовать различную ширину полосы частот. eNode-B управляет передачей и приемом данных для нескольких UE. Вместе с данными нисходящей линии связи (DL) eNode-B передает информацию о планировании нисходящей линии связи (DL) соответствующему UE, чтобы сообщить соответствующему UE временные/частотные области, где будут переданы данные, информацию о кодировании, информацию о размере данных, информацию, связанную с гибридным автоматическим запросом на повторную передачу данных (HARQ) и т.п. Вместе с данными восходящей линии связи (UL) eNode-B передает информацию о планировании UL соответствующему UE, чтобы сообщить соответствующему UE временные/частотные области, которые могут использоваться соответствующим UE, информацию о кодировании, информацию о размере данных, информацию, связанную с HARQ и т.п. Между несколькими eNode-B может использоваться интерфейс для передачи трафика пользователя или трафика управления. Базовая сеть (CN) может включать в себя шлюз доступа (AG) и узел сети для пользовательской регистрации UE. AG администрирует мобильность UE на основании области отслеживания (TA), состоящей из нескольких сот.
[6] Хотя технология беспроводной связи была разработана для технологии LTE на основе технологии WCDMA, пользователи и организации постоянно требуют новых функций и услуг. Кроме того, разрабатываются другие технологии беспроводного доступа, так что имеется потребность в новой или улучшенной технологии беспроводного доступа, чтобы остаться конкурентоспособными в долгосрочной перспективе. Например, уменьшение стоимости на бит, увеличение доступности услуг, адаптивное использование полосы частот, простая структура, интерфейс открытого типа и соответствующее потребление энергии пользовательского оборудования (UE) необходимо для новой или улучшенной технологии беспроводного доступа.
Сущность изобретения
Техническая проблема
[7] Целью настоящего изобретения, разработанного для решения этой проблемы, является способ для измерения расстояния между устройствами с помощью прямой связи устройство-устройство в системе беспроводной связи и соответствующий прибор.
Техническое решение
[8] В одном аспекте настоящего изобретения способ для передачи пользовательским оборудованием (UE) сигнала для прямой связи устройство-устройство (D2D) в системе беспроводной связи включает в себя этапы, на которых: принимают подкадр нисходящей линии связи от опорного eNB; передают первый сигнал партнерскому UE на основании границы подкадра нисходящей линии связи; и передают второй сигнал партнерскому UE с заранее определенным смещением до границы подкадра нисходящей линии связи.
[9] В другом аспекте настоящего изобретения UE, выполняющее связь D2D в системе беспроводной связи, включает в себя: радиочастотный (RF) модуль связи для передачи/приема сигнала от опорного eNB или партнерского UE по связи D2D; и процессор для обработки сигнала, при этом процессор выполнен с возможностью управления RF модулем связи для передачи первого сигнала партнерскому UE на основании границы подкадра нисходящей линии связи, принятого от опорного eNB, и передачи второго сигнала партнерскому UE с заранее определенным смещением до границы подкадра нисходящей линии связи.
[10] Граница подкадра нисходящей линии связи может быть задержана на величину задержки распространения в соответствии с расстоянием до опорного eNB от того момента, когда опорный eNB передает подкадр нисходящей линии связи, и он принимается.
[11] Первый сигнал может включать в себя информацию о смещении. Смещение может быть задано равным значению опережения (TA) для передачи сигнала восходящей линии связи опорному eNB. UE может принимать информацию о смещении от рабочего eNB.
[12] Второй сигнал может быть задержан на величину задержки распространения в соответствии с расстоянием до партнерского UE от того момента, когда второй сигнал передается и принимается партнерским UE.
Полезные эффекты изобретения
[13] В соответствии с вариантами воплощения настоящего изобретения можно эффективно измерять расстояние между устройствами с использованием прямой связи устройство-устройство в системе беспроводной связи.
[14] Специалистам в области техники будет понятно, что эффекты, которые могут быть достигнуты с помощью настоящего изобретения, не ограничиваются тем, что было, в частности, описано выше, и другие преимущества настоящего изобретения будут более понятны из следующего подробного описания.
Описание чертежей
[15] Фиг. 1 является концептуальной схемой, изображающей сетевую структуру развитой универсальной системы мобильной связи (E-UMTS) в качестве иллюстративной системы мобильной связи.
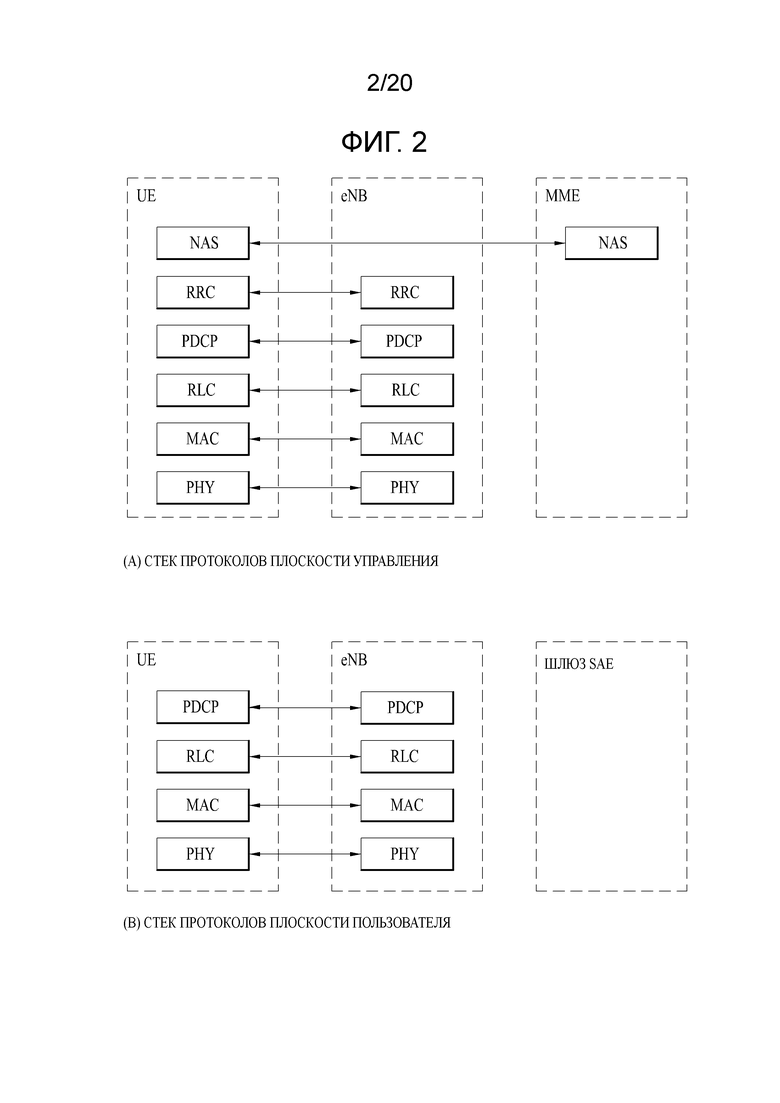
[16] Фиг. 2 изображает плоскость управления и плоскость пользователя (U-плоскость) протокола радиоинтерфейса между пользовательским оборудованием (UE) и E-UTRAN в соответствии со стандартом сети беспроводного доступа 3GPP.
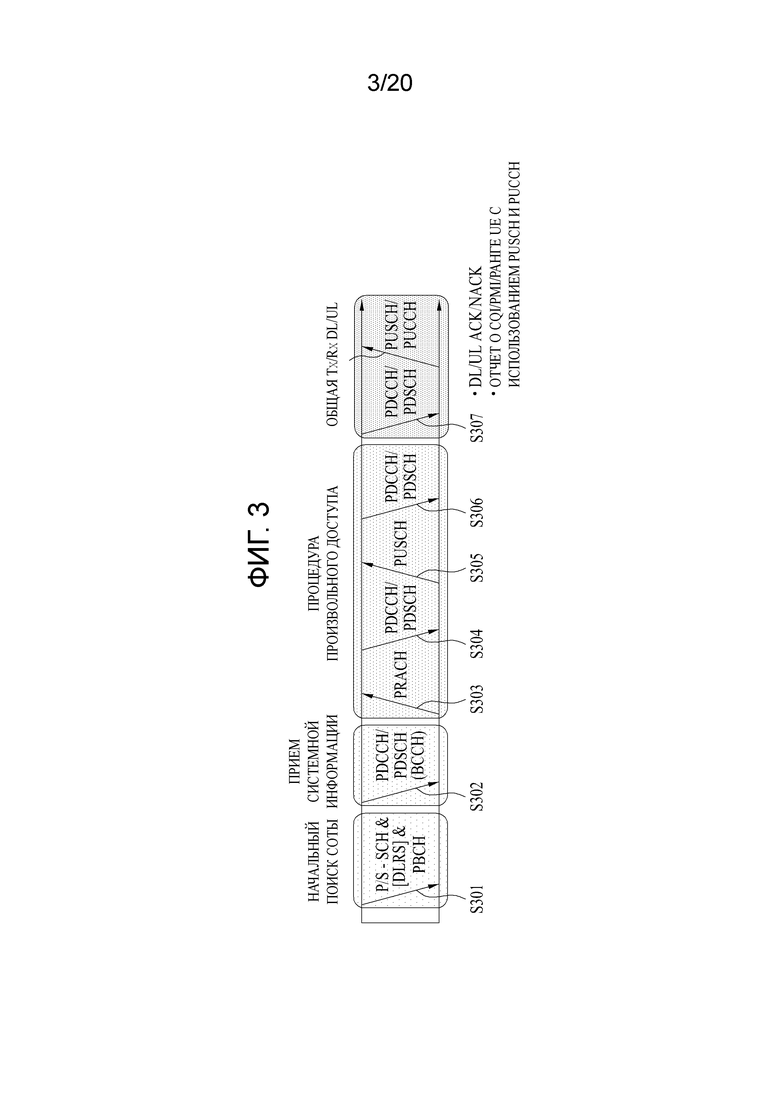
[17] Фиг. 3 является концептуальной схемой, изображающей физические каналы, используемые в системе LTE 3GPP в качестве иллюстративной системы беспроводной связи и общий способ для передачи сигнала с использованием физических каналов.
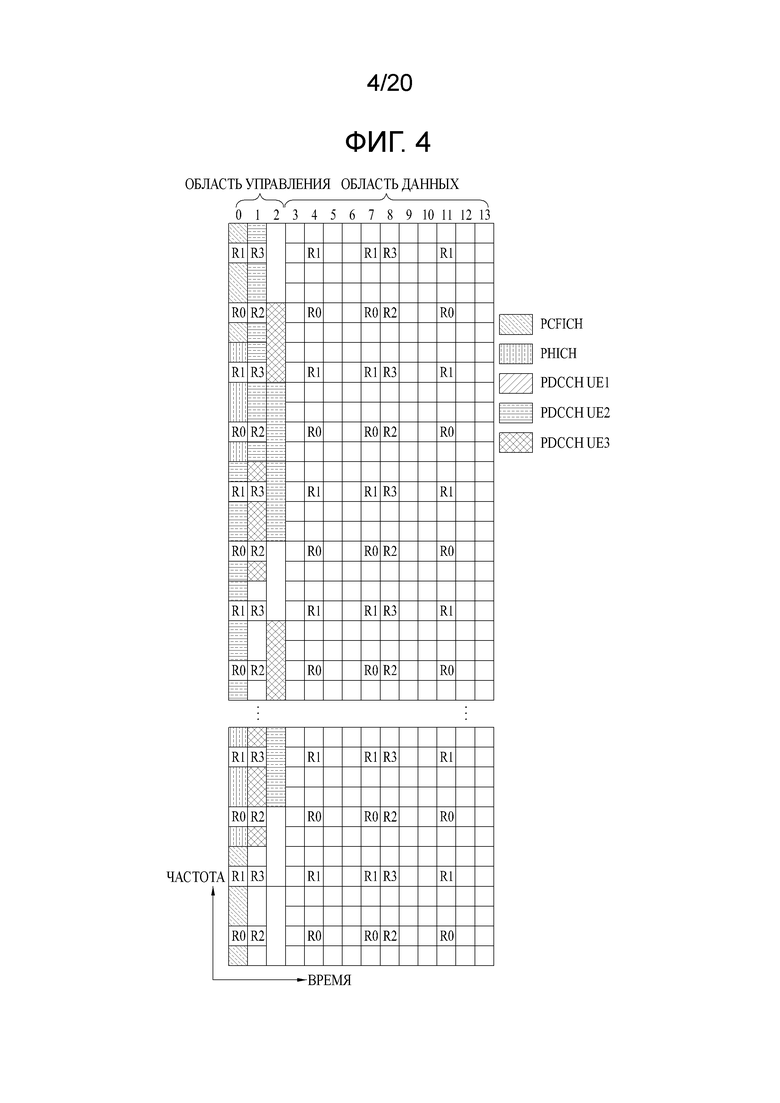
[18] Фиг. 4 является концептуальной схемой, изображающей радиокадр нисходящей линии связи для использования в системе LTE.
[19] Фиг. 5 является концептуальной схемой, изображающей радиокадр восходящей линии связи для использования в системе LTE.
[20] Фиг. 6 является схемой, изображающей структуру радиокадра для использования в системе TDD стандарта "Долгосрочное развитие сетей связи" (LTE).
[21] Фиг. 7 изображает момент передачи и приема радиокадра восходящей линии связи и радиокадра нисходящей линии связи в системе LTE.
[22] Фиг. 8 является концептуальной схемой, изображающей прямую связь D2D.
[23] Фиг. 9 изображает момент передачи DS посредством целевого UE и момент приема DS рабочим UE в соответствии с вариантом воплощения настоящего изобретения.
[24] Фиг. 10 изображает области, в которых может быть расположено целевое UE, которые вычислены в соответствии с вариантом воплощения настоящего изобретения.
[25] Фиг. 11 изображает области, в которых может быть расположено целевое UE, которые вычислены в соответствии с вариантом воплощения настоящего изобретения.
[26] Фиг. 12 изображает пример передачи и приема сигнала с использованием прямой связи устройство-устройство, то есть сигнала D2D, в соответствии с вариантом воплощения настоящего изобретения.
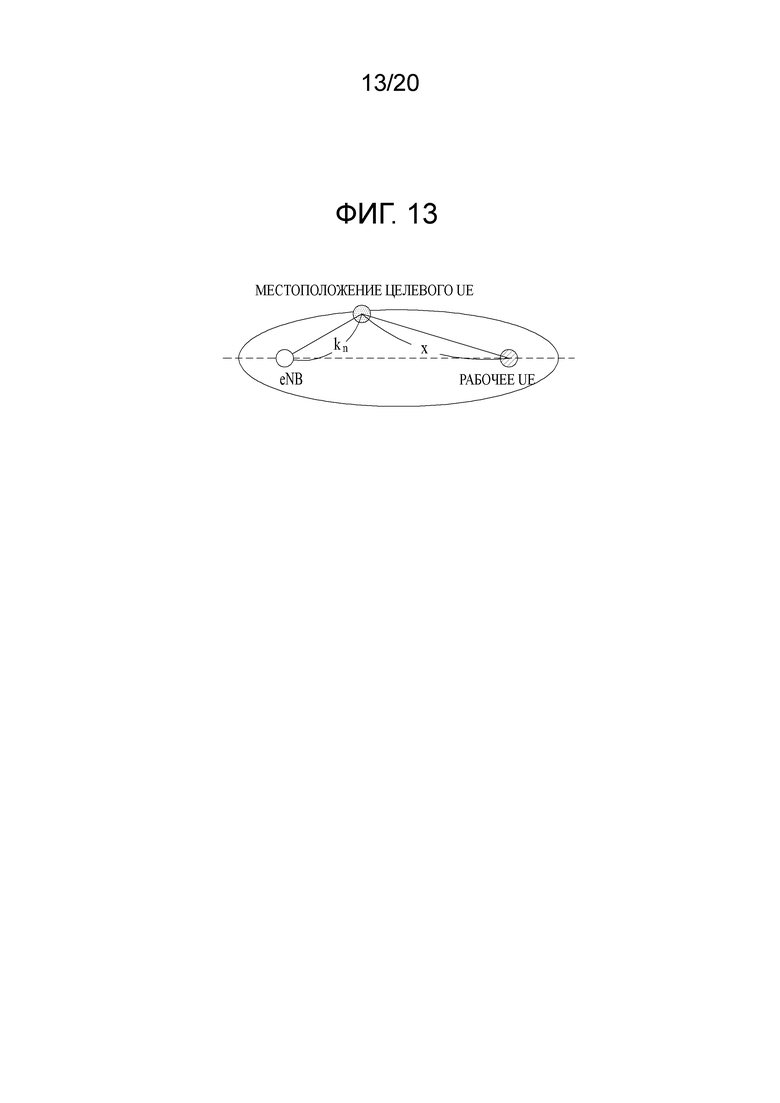
[27] Фиг. 13 изображает иллюстративный способ для детектирования местоположения целевого UE в соответствии с вариантом воплощения настоящего изобретения.
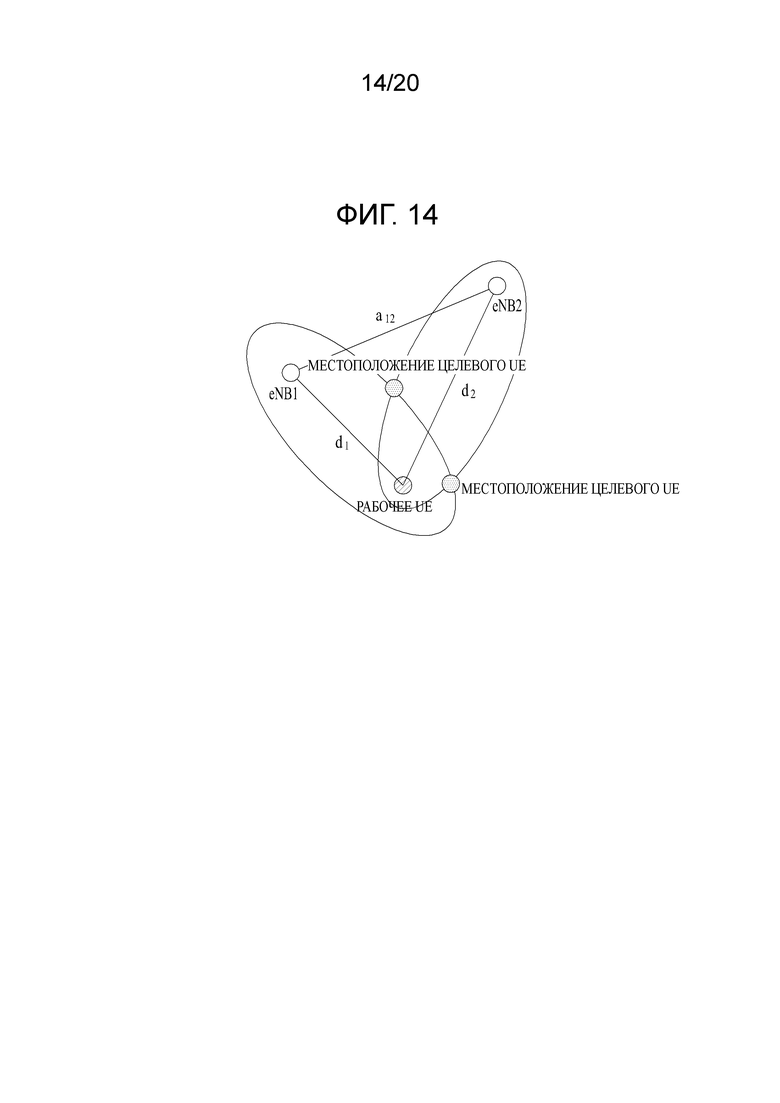
[28] Фиг. 14 изображает другой иллюстративный способ для детектирования местоположения целевого UE в соответствии с вариантом воплощения настоящего изобретения.
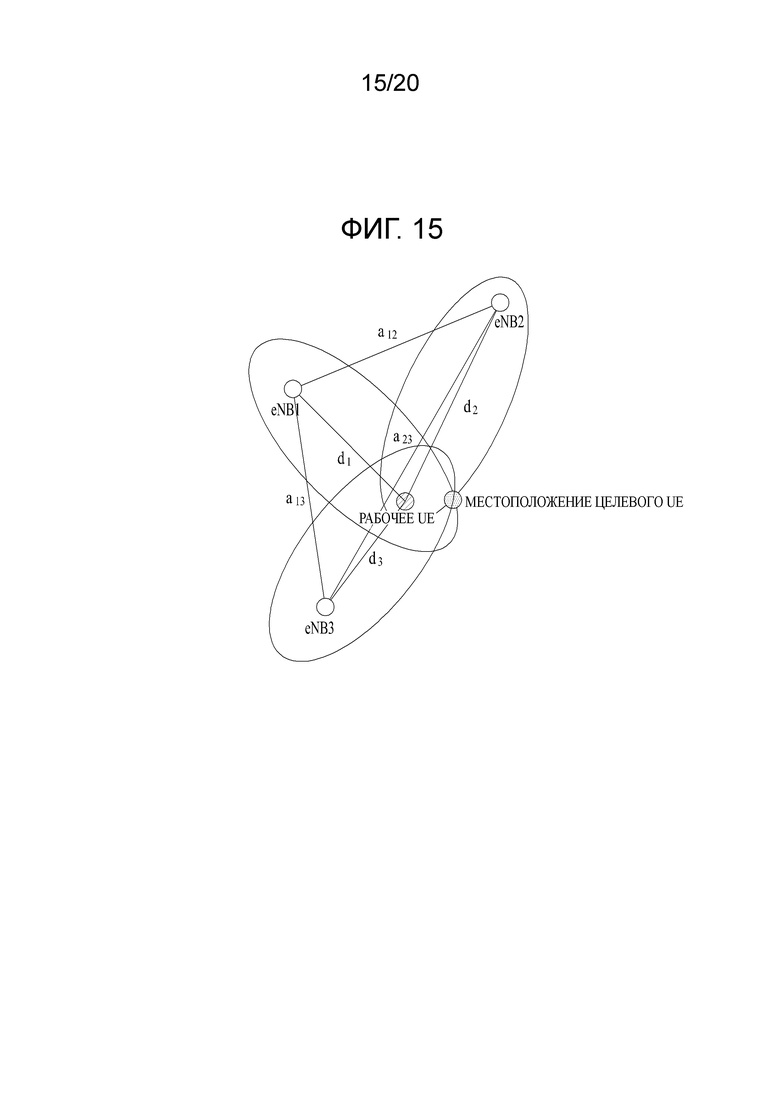
[29] Фиг. 15 изображает другой иллюстративный способ для детектирования местоположения целевого UE в соответствии с вариантом воплощения настоящего изобретения.
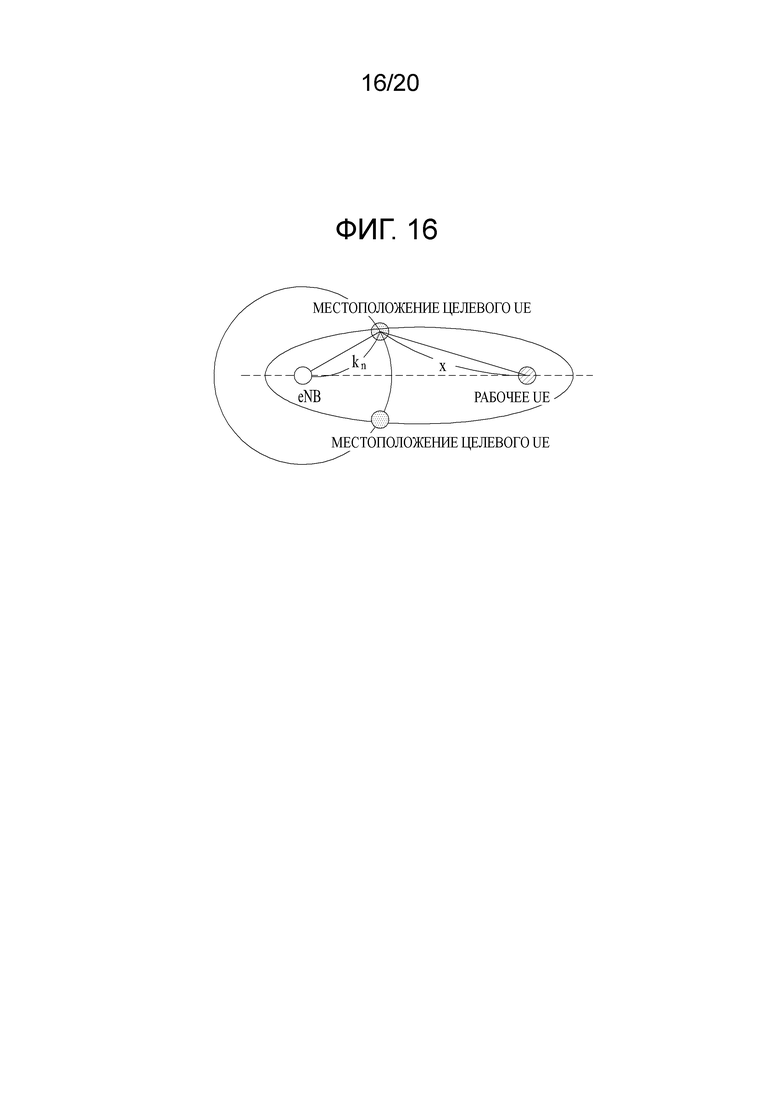
[30] Фиг. 16 изображает пример уменьшения числа потенциальных местоположений целевого UE путем добавления круга, соответствующего расстоянию между соответствующим опорным eNB DS и целевым UE в соответствии с вариантом воплощения настоящего изобретения.
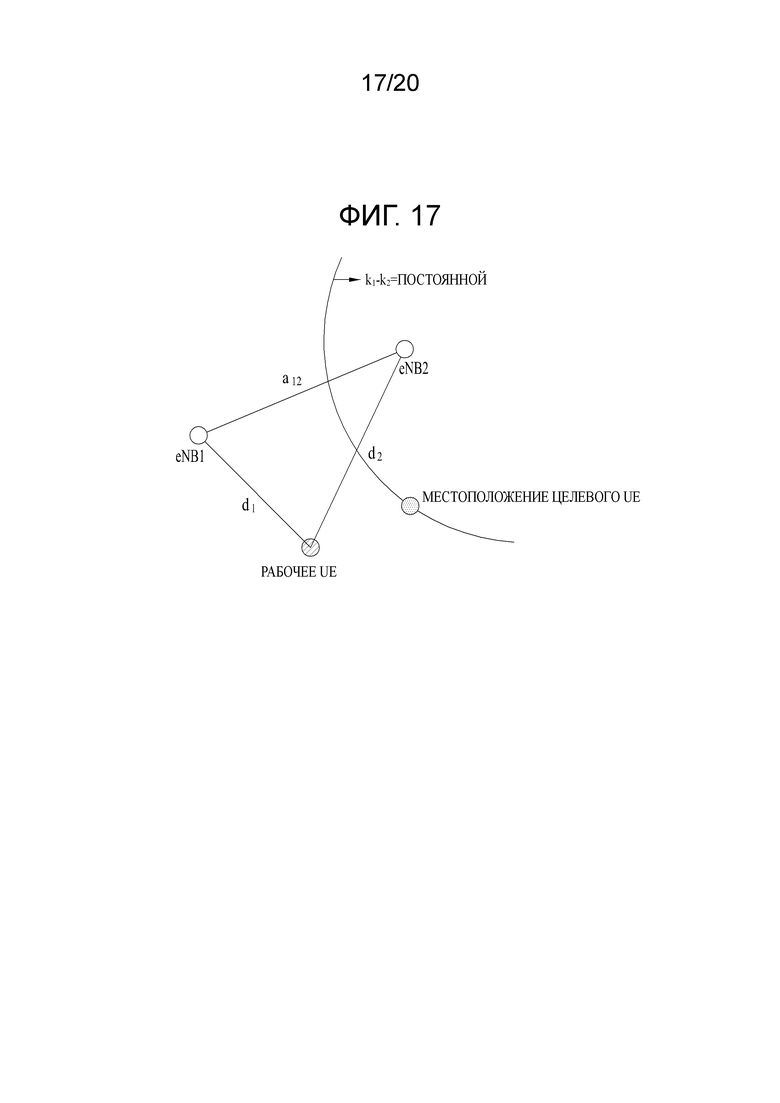
[31] Фиг. 17 изображает пример измерения местоположения целевого UE или расстояния до целевого UE с использованием разницы во времени приема сигнала DS в соответствии с вариантом воплощения настоящего изобретения.
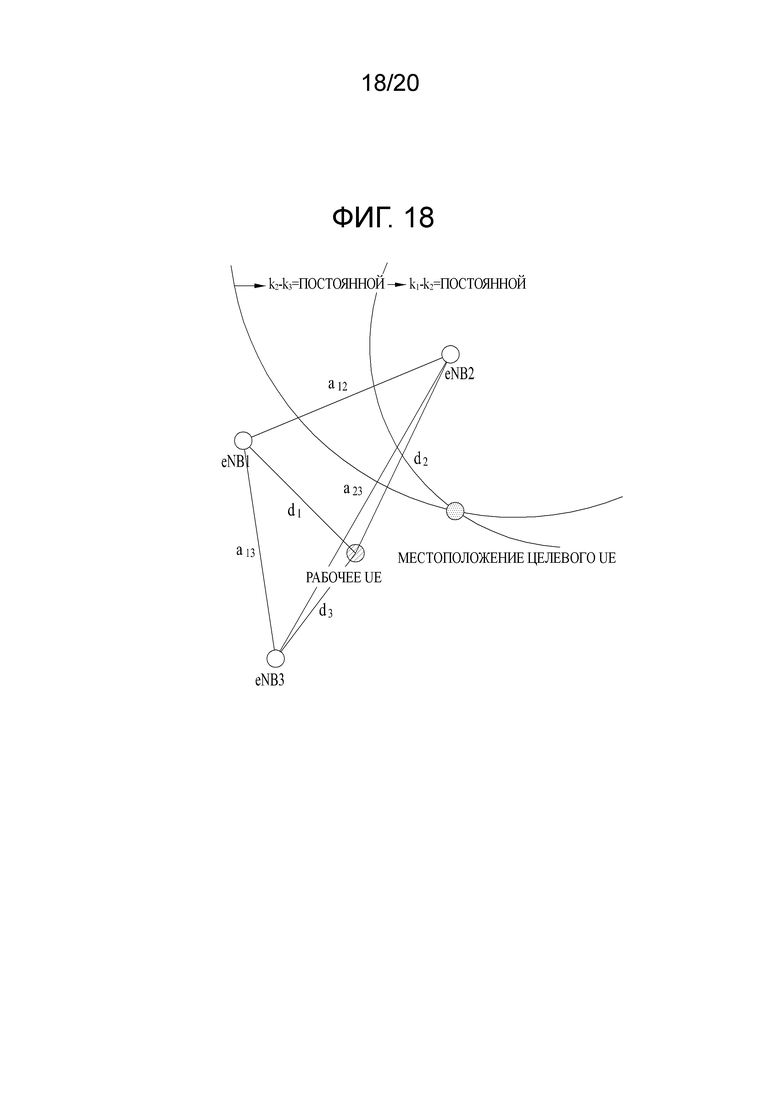
[32] Фиг. 18 изображает другой пример измерения местоположения целевого UE или расстояния до целевого UE с использованием разницы во времени приема сигнала DS в соответствии с вариантом воплощения настоящего изобретения.
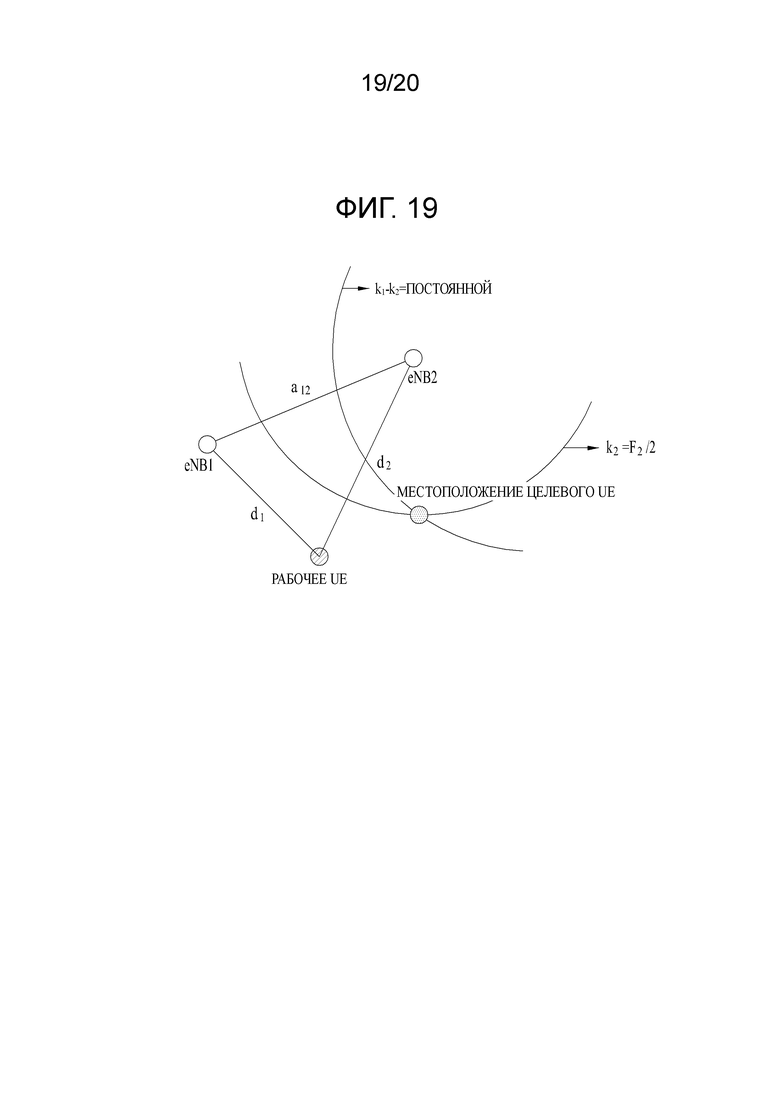
[33] Фиг. 19 изображает пример измерения расстояния до целевого UE путем обнаружения расстояния между каждым опорным eNB и целевым UE в соответствии с вариантом воплощения настоящего изобретения.
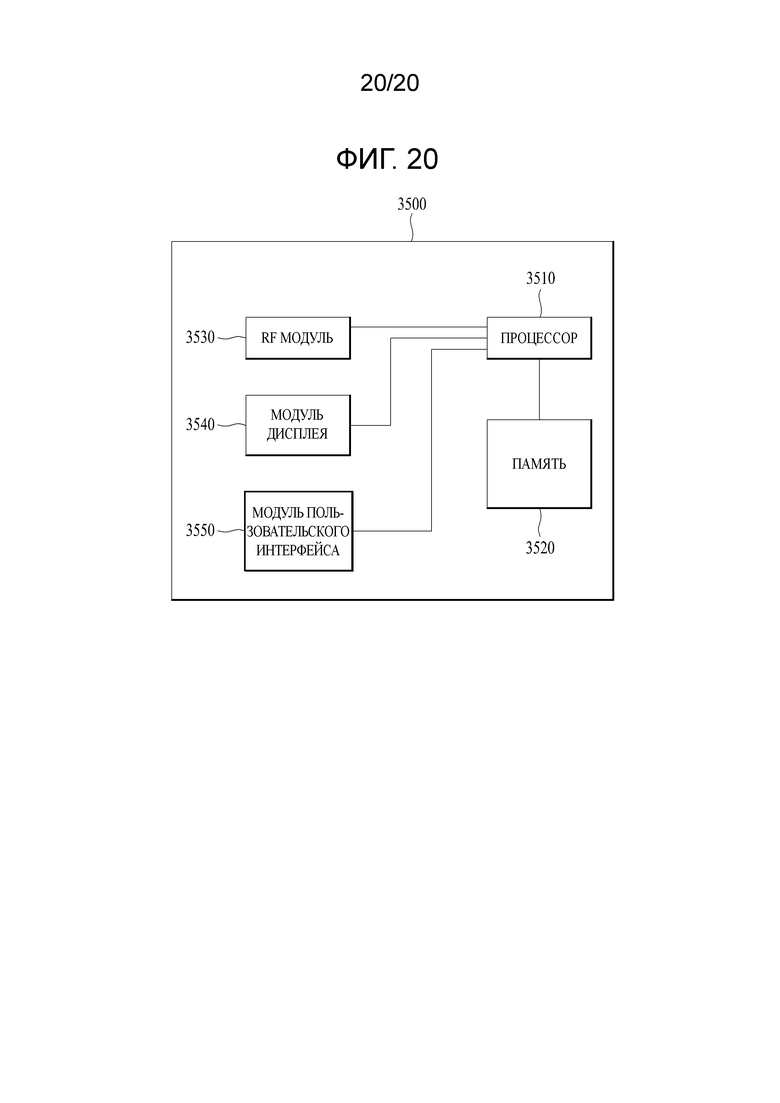
[34] Фиг. 20 является блок-схемой, изображающей коммуникационное устройство в соответствии с вариантами воплощения настоящего изобретения.
Лучший режим
[35] Теперь будет дано подробное описание предпочтительных вариантов воплощения настоящего изобретения, примеры которых изображены на прилагаемых чертежах. Везде, где это возможно, на чертежах будут использоваться одинаковые ссылочные позиции для обозначения одинаковых или подобных частей. Упомянутые выше и другие конфигурации, операции и признаки настоящего изобретения будут понятны из вариантов воплощения изобретения, описанных ниже со ссылкой на прилагаемые чертежи. Варианты воплощения, описанные ниже, являются примерами, в которых технические признаки изобретения применены к системе партнерского проекта по системам 3-го поколения (3GPP).
[36] Хотя для удобства описания и лучшего понимания настоящего изобретения вариант воплощения настоящего изобретения будет раскрыт на основе системы LTE и системы LTE-A, следует отметить, что объем или сущность настоящего изобретения не ограничиваются ими и при необходимости могут быть применены к другим системам связи. Кроме того, хотя вариант воплощения настоящего изобретения будет раскрыт, например, на основе схемы FDD, объем или сущность варианта воплощения настоящего изобретения не ограничиваются этим и при необходимости могут также быть применены к схемам HFDD и TDD.
[37] Фиг. 2 изображает плоскость управления и плоскость пользователя (U-плоскость) протокола радиоинтерфейса между пользовательским оборудованием (UE) и E-UTRAN в соответствии со стандартом сети беспроводного доступа 3GPP. Через плоскость управления передаются управляющие сообщения, которые используют UE и сетевое использование для администрирования вызовов. Через плоскость пользователя передаются данные (например, речевая информация или пакетные данные сети Интернет), генерируемые на уровне приложений.
[38] Физический уровень, который является первым уровнем, предоставляет услугу передачи информации верхнему уровню, используя физический канал. Физический уровень соединен с уровнем управления доступом к среде (MAC), расположенным над физическим уровнем, через транспортный канал. Данные передаются между уровнем MAC и физическим уровнем через транспортный канал. Передача данных между различными физическими уровнями, в частности, между соответствующими физическими уровнями передающей и принимающей сторон, выполняется через физический канал. Физический канал использует временную и частотную информацию в качестве радио-ресурсов. Более подробно, используя временную и частотную информацию в качестве радио-ресурсов, физический канал модулируется в соответствии со схемой множественного доступа с ортогональным частотным разделением (OFDMA) через нисходящую линию связи и модулируется в соответствии со схемой множественного доступа с частотным разделением на одной несущей (SC-FDMA) через восходящую линию связи.
[39] Уровень MAC второго уровня предоставляет услуги уровню управления радиотрактами (RLC), расположенному над уровнем MAC, через логический канал. Уровень RLC второго уровня увеличивает надежность передачи данных. Функции уровня RLC могут также быть реализованы с помощью внутренних функциональных блоков уровня MAC. Уровень PDCP второго уровня выполняет функцию сжатия заголовка для уменьшения ненужной управляющей информации, чтобы эффективно передавать пакеты IP, такие как пакеты IPv4 или IPv6, по радиоинтерфейсу с относительно узкой шириной полосы частот.
[40] Уровень управления радиоресурсами (RRC), расположенный в самой нижней части третьего уровня, определен только в плоскости управления, и он отвечает за управление логическими, транспортными и физическими каналами совместно с конфигурацией, реконфигурацией и освобождением радиоканалов (RB). Радиоканал (RB) является услугой, которую второй уровень предоставляет для передачи данных между UE и сетью. Для достижения этого уровень RRC UE и уровень RRC сети обмениваются сообщениями RRC. UE находится в режиме соединения RRC, если соединение RRC было установлено между уровнем RRC радиосети и уровнем RRC UE. В противном случае UE находится в режиме ожидания RRC. Уровень без доступа (NAS), расположенный на верхнем уровне уровня RRC, выполняет такие функции, как администрирование сеансов и администрирование мобильности.
[41] Одна сота eNB (eNode-B) задается, чтобы использовать ширину полосы частот, такую как, например, 1.4, 3, 5, 10, 15 или 20 МГц, для обеспечения услуги передачи по нисходящей линии связи или по восходящей линии связи для UE. Здесь различные соты могут быть заданы, чтобы использовать различную ширину полосы частот.
[42] Транспортные каналы нисходящей линии связи для передачи данных от сети пользовательскому оборудованию (UE) включают в себя широковещательный канал (BCH) для передачи системной информации, пейджинговый канал (PCH) для передачи пейджинговых сообщений и совместно используемый канал (SCH) нисходящей линии связи для передачи трафика пользователя или управляющих сообщений. Трафик пользователя или управляющие сообщения услуги многоадресной или широковещательной передачи нисходящей линии связи могут передаваться через SCH нисходящей линии связи, а также могут передаваться через многоадресный канал (MCH) нисходящей линии связи. В то же время, транспортные каналы восходящей линии связи для передачи данных от UE сети включают в себя канал произвольного доступа (RACH) для передачи начальных управляющих сообщений и SCH восходящей линии связи для передачи трафика пользователя или управляющих сообщений. Логические каналы, которые расположены над транспортными каналами и установлены в соответствие транспортным каналам, включают в себя широковещательный канал управления (BCCH), пейджинговый канал управления (PCCH), общий канал управления (CCCH), многоадресный канал управления (MCCH) и канал многоадресного трафика (MTCH).
[43] Фиг. 3 является концептуальной схемой, изображающей физические каналы для использования в системе 3GPP и общий способ для передачи сигнала с использованием физических каналов.
[44] Обращаясь к фиг. 3, при включении или входе в новую соту, UE выполняет начальный поиск соты на этапе S301. Начальный поиск соты включает в себя синхронизацию с BS. В частности, UE синхронизируется с BS и получает идентификатор соты (ID) и другую информацию путем приема первичного канала синхронизации (P-SCH) и вторичного канала синхронизации (S-SCH) от BS. Затем UE может получить информацию, передаваемую с помощью широковещания в соте, путем приема физического широковещательного канала (PBCH) от BS. Во время начального поиска соты UE может отслеживать состояние канала нисходящей линии связи путем приема опорного сигнала нисходящей линии связи (RS DL).
[45] После начального поиска соты UE может получить более конкретную системную информацию путем приема физического канала управления нисходящей линии связи (PDCCH) и приема физического совместно используемого канала нисходящей линии связи (PDSCH) на основании информации PDCCH на этапе S302.
[46] С другой стороны, если UE первоначально получает доступ к BS или если у UE нет радиоресурсов для передачи сигналов, оно может выполнить процедуру произвольного доступа к BS на этапах с S303 по S306. Для произвольного доступа UE может передать заранее определенную последовательность как преамбулу базовой станции (BS) на физическом канале произвольного доступа (PRACH) на этапах (S303~S306) и принять ответное сообщение для преамбулы на PDCCH и PDSCH, соответствующем PDCCH, на этапах S304 и S306. В случае соревновательного RACH, UE может выполнить процедуру устранения конфликтов.
[47] После описанной выше процедуры UE может принять PDCCH и PDSCH на этапе S307 и передать физический совместно используемый канал восходящей линии связи (PUSCH) и физический канал управления восходящей линии связи (PUCCH) на этапе S308 в качестве общей процедуры передачи сигналов нисходящей линии связи/восходящей линии связи (DL/UL). В частности, UE может принять управляющую информацию нисходящей линии связи (DCI) через PDCCH. В этом случае DCI включает в себя управляющую информацию, такую как информация о распределении ресурсов для UE, и эта информация имеет различные форматы в соответствии с целями использования.
[48] С другой стороны, управляющая информация восходящей линии связи, переданная от UE базовой станции (BS), или управляющая информация нисходящей линии связи, переданная от UE базовой станции (BS), может включать в себя сигнал подтверждения/неподтверждения (ACK/NACK) нисходящей линии связи (DL) или восходящей линии связи (UL), индикатор качества канала (CQI), индекс матрицы предварительного кодирования (PMI) и/или индикатор ранга (RI). UE, выполненное с возможностью работы в системе LTE 3GPP, может передавать управляющую информацию, такую как CQI, PMI и/или RI, на PUSCH и/или PUCCH.
[49] Фиг. 4 показывает канал управления, содержащийся в области управления одного подкадра в радиокадре нисходящей линии связи, в соответствии с одним вариантом воплощения настоящего изобретения.
[50] Обращаясь к фиг. 4, один подкадр включает в себя 14 символов OFDM. С первого по третий из этих 14 символов OFDM могут использоваться в качестве области управления, а оставшиеся символы OFDM (то есть 11-13 символов OFDM) могут использоваться в качестве области данных. На фиг. 4 R1 - R4 представляют собой опорные сигналы (RS) (также называемые пилотными сигналами) антенн 0-3, соответственно. В общем подкадре RS антенн 0-3 следуют заранее определенному шаблону независимо от области управления и области данных. Канал управления располагается в ресурсе, в котором нет RS, в области управления. Канал трафика располагается в ресурсе, в котором нет RS, в области данных. В области управления может размещаться множество каналов управления, например, физический канал индикатора формата управления (PCFICH), физический канал индикатора гибридного - ARQ (PHICH), физический канал управления нисходящей линии связи (PDCCH) и т.д.
[51] PCFICH используется в качестве физического канала индикатора формата управления и сообщает UE число символов OFDM, используемых для PDCCH в каждом подкадре. PCFICH расположен в первом символе OFDM и имеет приоритет над PHICH и PDCCH. PCFICH включает в себя 4 группы ресурсных элементов (REG), и отдельные REG распределяются в область управления на основании ID соты. Один REG включает в себя четыре RE. RE является минимальным физическим ресурсом, определяемым выражением ‘одна поднесущая × один символ OFDM’. Значение PCFICH указывает значения 1-3 или значения 2-4 в соответствии с шириной полосы частот и модулируется с помощью QPSK (квадратурной фазовой манипуляции).
[52] PHICH используется в качестве физического канала индикатора HARQ (гибридного автоматического запроса на повторную передачу данных), он несет сигналы ACK/NACK HARQ для передачи восходящей линии связи. Другими словами, PHICH указывает канал для передачи информации о ACK/NACK DL для HARQ UL. PHICH включает в себя одну REG, он зашифрован для каждой соты в отдельности. Сигнал ACK/NACK, указываемый одним битом, модулируется с помощью BPSK (двоичной фазовой манипуляции). Модулированный ACK/NACK расширяется с коэффициентом расширения (SF) 2 или 4. Несколько PHICH, установленных в соответствие одним и тем же ресурсам, создают группу PHICH. Число PHICH, мультиплексированных в группе PHICH, может быть определено в соответствии с числом кодов расширения. PHICH (или группа PHICH) может повторяться три раза, чтобы получить усиление при разнесении в частотной области и/или временной области.
[53] PDCCH, действующий как физический канал управления нисходящей линии связи, размещается в N первых символах OFDM подкадра. В этом случае N является целым числом, равным 1 или больше, и оно указывается с помощью PCFICH. PDCCH включает в себя один или несколько CCE. PDCCH может сообщить каждому UE или группе UE информацию, относящуюся к распределению ресурсов PCH (пейджингового канала) и DL-SCH (совместно используемого канала нисходящей линии связи), предоставлению планирования восходящей линии связи, информацию о HARQ и т.д. PCH и DL-SCH передаются через PDSCH. Поэтому BS и UE могут передавать и принимать данные помимо конкретной управляющей информации или конкретных служебных данных через PDSCH.
[54] Информация, указывающая, какой UE будет принимать данные в качестве входных данных, информация, указывающая, как UE принимают данные PDSCH, и информация, указывающая, выполнено ли декодирование, содержится в PDCCH. Например, предполагается, что конкретный PDCCH является CRC-маскированным с помощью временного идентификатора сети радиосвязи (RNTI), называемого ‘A’, а информация, которая передается с использованием радиоресурсов ‘B’ (например, положение частоты), и информация о формате передачи ‘C’ (например, размер блока передачи, схема модуляции, информация о кодировании и т.д.) передается через конкретный подкадр. В этом случае UE, расположенное в соте, отслеживает PDCCH с использованием его собственной информации об RNTI. Если, по меньшей мере одно UE, имеющее RNTI ‘A’, присутствует, UE принимают PDCCH и принимают PDSCH, указанный с помощью ‘B’ и 'С' через принятую информацию PDCCH.
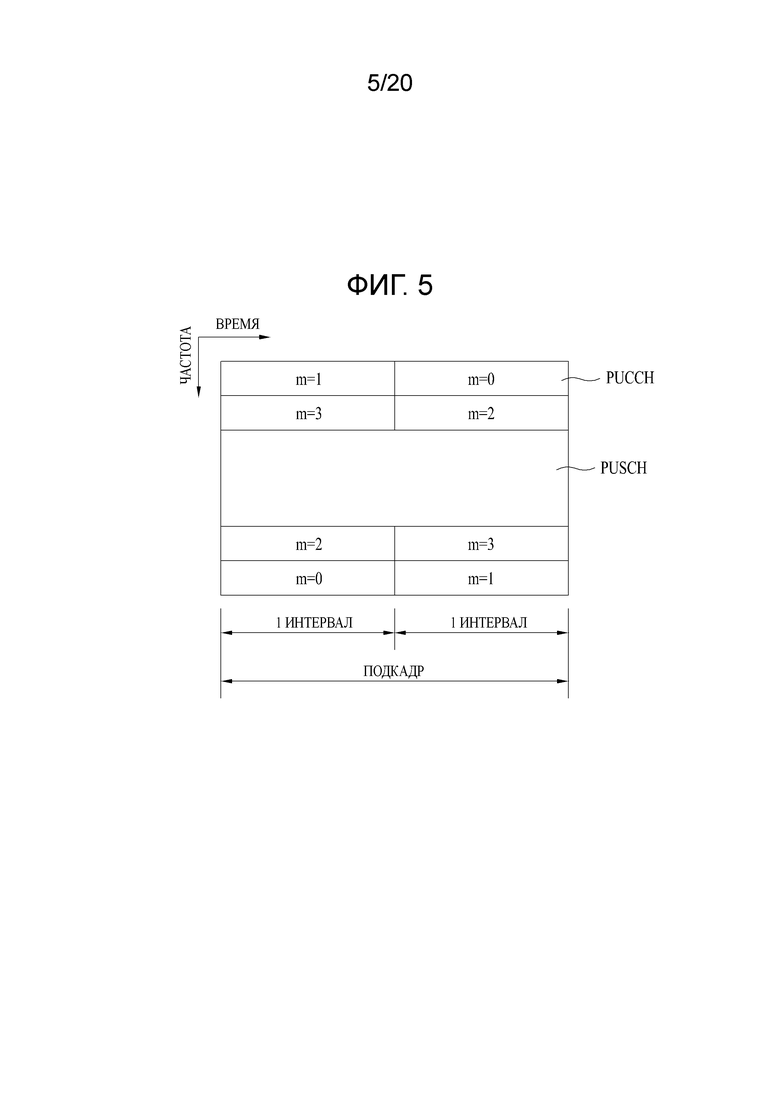
[55] Фиг. 5 изображает структуру подкадра UL в LTE.
[56] Обращаясь к фиг. 5, подкадр UL может быть разделен на область, в которой располагается физический канал управления восходящей линии связи (PUCCH), несущий управляющую информацию, и область, в которой располагается физический совместно используемый канал восходящей линии связи (PUSCH), несущий пользовательские данные. Середина подкадра выделена под PUSCH, в то время как обе стороны области данных в частотной области выделены под PUCCH. Управляющая информация, передаваемая в PUCCH, может включать в себя ACK/NACK HARQ, CQI, представляющую собой состояние канала нисходящей линии связи, RI для MIMO и запрос планирования (SR), запрашивающий распределение ресурсов UL. PUCCH для одного UE занимает один RB в каждом интервале подкадра. То есть, эти два RB, выделенные под PUCCH, имеют скачок по частоте на границе интервалов подкадра. В частности, PUCCH с m=0, m=1, m=2 и m=3 располагаются в подкадре на фиг. 5.
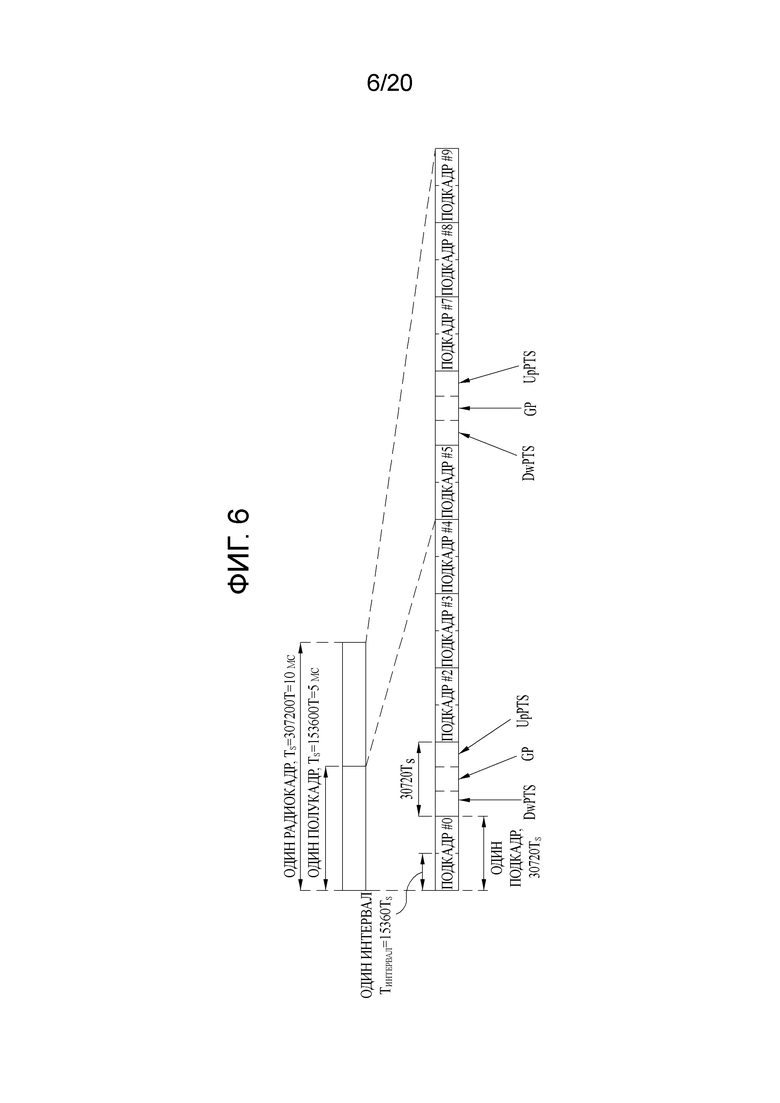
[57] Фиг. 6 является схемой, изображающей структуру радиокадра для использования в TDD LTE. Радиокадр для использования в TDD LTE включает в себя два полукадра, каждый полукадр включает в себя 4 подкадра, каждый из которых имеет 2 интервала и специальный подкадр, имеющий временной интервал пилотного сигнала нисходящей линии связи (DwPTS), защитный период (GP) и временной интервал пилотного сигнала восходящей линии связи (UpPTS).
[58] В специальном подкадре DwPTS используется для начального поиска соты, синхронизации или оценки канала в UE. UpPTS используется для выполнения eNB оценки канала и получения синхронизации UL с UE. Другими словами, DwPTS используется для передачи DL, а UpPTS используется для передачи UL. В частности, UpPTS используется для передачи преамбулы PRACH или зондирующего опорного сигнала (SRS). GP используется для устранения интерференции UL между UL и DL, вызванной многопутевой задержкой сигнала DL.
[59] Конфигурации подкадра UL/DL для TDD LTE перечислены в Таблице 1 ниже.
[60] [Таблица 1]
[61] В Таблице 1 D представляет собой подкадр DL, U представляет собой подкадр UL, и S представляет собой специальный подкадр. В Таблице 1 дополнительно приводится периодичность переключения DL - UL для соответствующих конфигураций подкадров UL/DL в каждой системе.
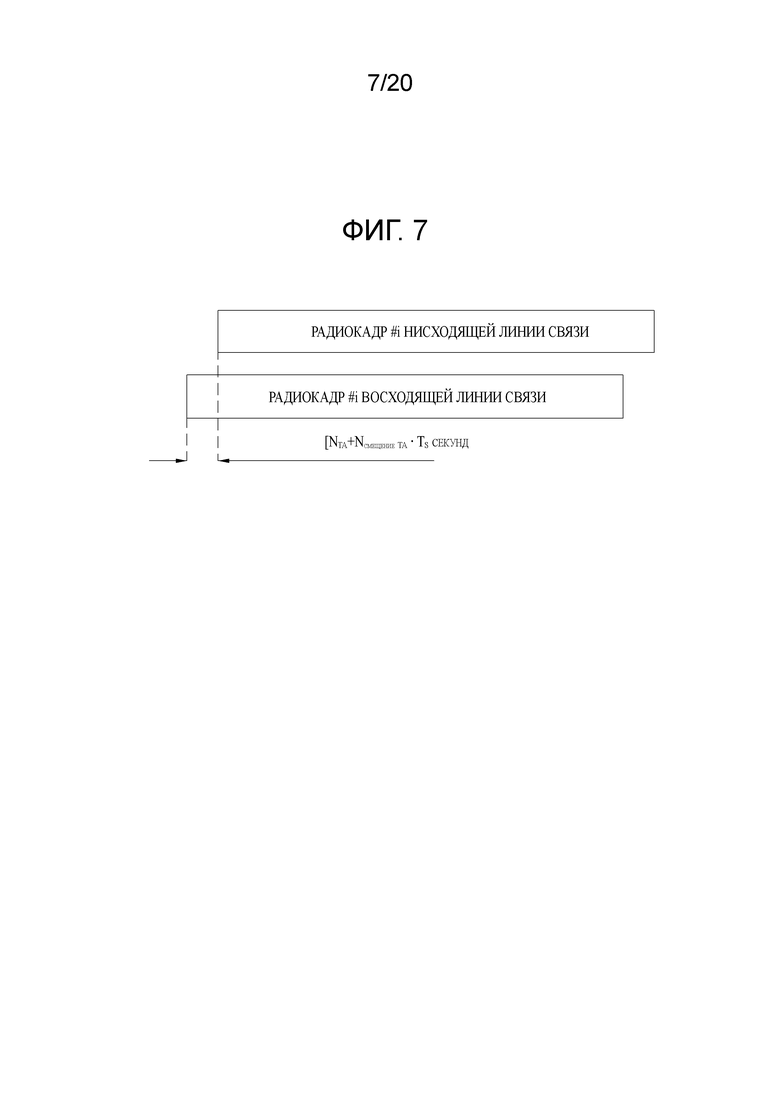
[62] Фиг. 7 изображает моменты передачи и приема радиокадра восходящей линии связи и радиокадра нисходящей линии связи в системе LTE.
[63] Обращаясь к фиг. 7, передача радиокадра #i восходящей линии связи от терминала, то есть UE, выполняется за (NTA+Nсмещение TA)×Ts секунд (0≤NTA≤20512) до начала соответствующего радиокадра #i нисходящей линии связи. Здесь, Nсмещение TA=0 в типе 1 структуры кадра, то есть, FDD, и Nсмещение TA=624 в типе 2 структуры кадра, то есть, TDD.
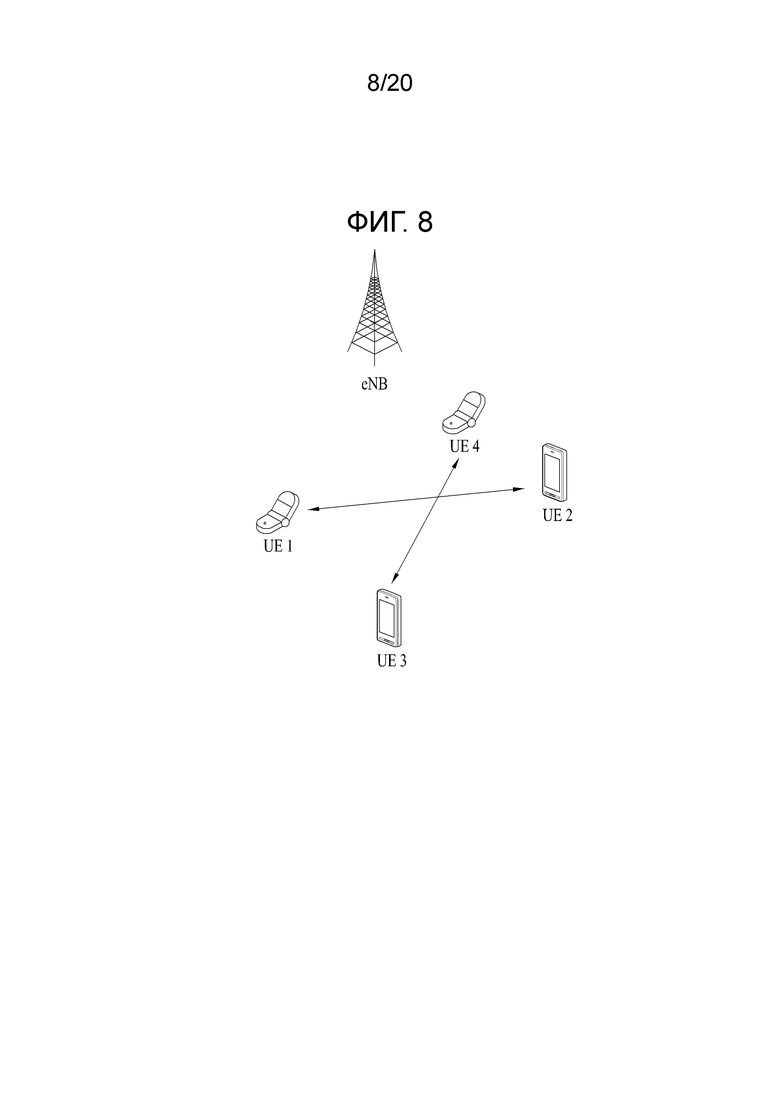
[64] Фиг. 8 является концептуальной схемой, изображающей прямую связь D2D.
[65] Обращаясь к фиг. 8, UE 1 и UE 2 выполняют прямую связь устройство-устройство, а UE 3 и UE 4 выполняют прямую связь устройство-устройство. eNB может управлять положением временных/частотных ресурсов и мощностью передачи для прямой связи устройство-устройство между UE с помощью соответствующих управляющих сигналов. Однако когда UE расположены за пределами покрытия eNB, прямая связь между UE может выполняться без управляющего сигнала eNB. В следующем ниже описании прямая связь устройство-устройство называется связью D2D.
[66] Настоящее изобретение предлагает способ для измерения местоположения партнерского UE или расстояния между UE и партнерским UE с использованием сигнала D2D между UE и партнерским UE.
[67] Если UE может обнаружить местоположение другого UE или расстояние между UE и другим UE, то UE может предоставить множество полезных услуг. Например, если может быть обнаружено расстояние между UE и другим UE, и другое UE расположено в пределах заранее определенного расстояния, UE может предоставить услугу информирования его пользователя о местоположении другого UE и расстоянии между UE и другим UE, в результате чего пользователь может определить пользователя другого UE. Кроме того, когда множество UE передают сообщения, например, рекламные объявления, UE может принимать только рекламные сообщения в пределах конкретного расстояния от UE. Кроме того, можно предоставить услугу отслеживания присутствия UE, которое было зарегистрировано как UE, которым интересуется соответствующий UIE, в пределах конкретного расстояния или расстояния между соответствующим UE и интересующимся UE и информирования пользователя о результате отслеживания.
[68] В качестве методики обнаружения информации о местоположении UE в системе беспроводной связи был предложен способ, с помощью которого UE принимает сигналы, переданные от нескольких eNB, и обнаруживает местоположение на основании принятых сигналов. В соответствии с этим способом UE обнаруживает соответствующее местоположение путем измерения сигналов, переданных от нескольких eNB, например, позиционирующих опорных сигналов (PRS) LTE 3GPP, и измерения времени поступления сигнала, переданного от каждой eNB, или разности между временем поступления сигналов, переданных от двух eNB. А именно, UE может обнаружить разность между расстояниями между UE и этими двумя eNB путем измерения разности между временем поступления сигналов, переданных от этих двух eNB, и может определить, что UE расположен в точке на кривой, на которой разность расстояний между этими двумя eNB является одинаковой. Когда этот процесс повторяется для других двух eNB, можно получить несколько кривых, на которых может быть расположено UE, и определить, что UE расположен в точке, где кривые пересекаются. Эта операция требует информации о местоположении нескольких eNB, измеренном UE. Однако, так как соответствующая сеть уже знает местоположения eNB, сеть может обнаружить местоположения соответствующих eNB, когда UE сообщает сети о времени поступления сигналов, переданных от eNB, или разности времени поступления между переданными сигналами.
[69] В качестве другой методики для детектирования информации о местоположении UE в системе беспроводной связи был предложен способ, в котором eNB принимает сигнал, переданный от UE, и сеть обнаруживает местоположение UE на основании принятого сигнала. В соответствии с этим способом UE передает конкретный сигнал, например, зондирующий опорный сигнал (SRS) LTE 3GPP, а множество eNB измеряют время поступления сигнала в каждом eNB или разность между временем поступления сигнала в двух eNB, принимая сигнал, переданный от UE. Затем сеть может вычислить расстояние между каждым eNB и UE или разность между расстояниями между двумя eNB и UE на основании информации о местоположении каждой eNB, которая была предоставлена сети, и повторить эту операцию для нескольких eNB, чтобы определить оказавшуюся общей точку как местоположение UE.
[70] Упомянутые выше операции не подходят для широкого использования при обнаружении UE местоположения другого UE.
[71] В частности, так как сеть в конечном итоге обнаруживает местоположение UE в обоих способах, когда конкретное UE хочет использовать информацию о положении другого UE, сеть должна измерить местоположение другого UE с помощью ряда операций с другим UE и затем передать информацию о местоположении другого UE конкретному UE. В этом процессе между сетью и несколькими UE генерируются сигнальные заголовки, и когда число UE увеличивается, сложность вычисления местоположений UE, выполняемого сетью, значительно увеличивается. В частности, когда UE запрашивает информацию, соответствующую неполной информации, такую как расстояние между UE и целевым UE, а не правильное местоположение целевого UE, более вероятно, что такие сигнальные заголовки или сложность вычислений, вызовет ненужное увеличение стоимости.
[72] Для решения этой проблемы настоящее изобретение предлагает способ для измерения местоположений UE и расстояния между UE для минимизации сигнальных заголовков и сложности вычислений в сети путем передачи и приема прямого сигнала, то есть сигнала, использующего связь D2D между UE.
[73] Настоящее изобретение предполагает, что каждое UE передает сигнал, указывающий его присутствие в соответствии с заранее определенным правилом. Этот сигнал называется сигналом обнаружения (DS). UE спроектированы так, что UE может распознавать UE, который передал конкретный DS, при приеме DS в соответствии с правилом передачи DS. Например, DS может включать в себя идентификационную информацию передающего UE. Правило передачи DS включает в себя способ генерации DS каждым UE и способ генерации временных/частотных ресурсов для передачи DS. Кроме того, сеть может осуществлять широковещание правила передачи DS, в результате чего UE, участвующие в передаче и приеме DS, могут определить это правило.
[74] В настоящем изобретении UE предполагает, что существует опорный eNB для определения времени передачи, при передаче DS. Такой eNB называется опорным eNB DS. UE может иметь множество опорных eNB DS. Например, UE может передавать DS, используя eNB1 в качестве опорного eNB DS в момент времени 1 и используя eNB2 в качестве опорного eNB DS в момент времени 2. В последующем описании UE, который намеревается измерить местоположение другого UE путем приема DS, называется рабочим UE, а UE, местоположение которого должно быть измерено рабочим UE, называется целевым UE. То есть рабочее UE измеряет местоположение целевого UE или расстояния между рабочим UE и целевым UE путем измерения DS, переданного из целевого UE. Однако операции, описанные в настоящем изобретении, не ограничиваются случаем, в котором используется DS, и применимы к случаям, в которых используется произвольный сигнал, непосредственно передаваемый и принимаемый между UE.
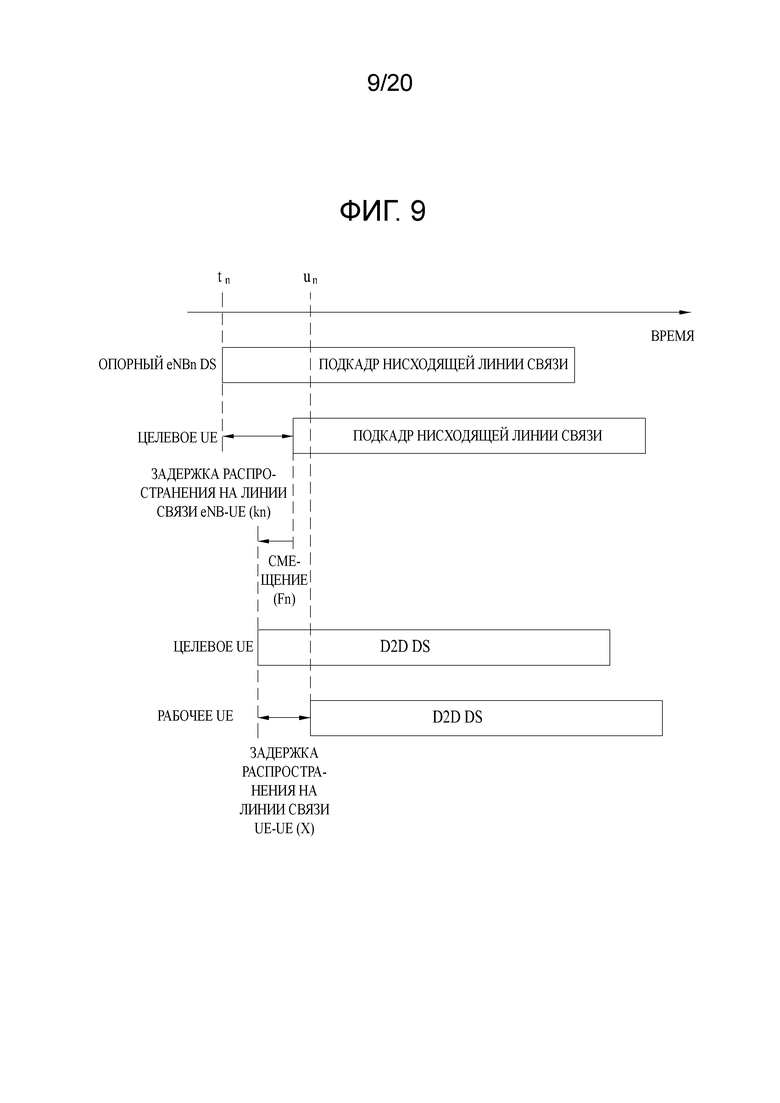
[75] Фиг. 9 изображает момент передачи DS целевому UE и момент приема DS рабочим UE в соответствии с вариантом воплощения настоящего изобретения.
[76] Обращаясь к фиг. 9, когда обеспечен eNBn в качестве опорного eNB DS, целевое UE определяет время передачи DS на основании момента приема границы подкадра нисходящей линии связи от eNBn. Если eNBn передал границу подкадра нисходящей линии связи в момент времени tn, а задержка распространения между eNBn и целевым UE равна kn, время приема целевым UE границы подкадра нисходящей линии связи eNBn равно tn+kn. Целевое UE передает его DS за время Fn до приема границы подкадра нисходящей линии связи eNBn. Значение Fn может быть ранее зафиксированным значением или может быть предоставлено в соответствии с инструкцией eNB. Когда Fn предоставлено в соответствии с инструкцией eNB, Fn может быть определено как такое же значение, как значение опережения (TA), применяемое, когда соответствующее UE передает сигнал UL узлу eNB. Если Fn было ранее зафиксировано, Fn может быть зафиксировано равным одному и тому же значению для всех опорных eNB DS.
[77] Сигнал, переданный целевым UE в момент tn+kn-Fn, достигает рабочее UE в момент времени un=tn+kn-Fn+x через время задержки x распространения между целевым UE и рабочим UE. Задержка распространения между опорным eNB DS, eNBn, и рабочим UE, как предполагается, равна dn.
[78] Будет дано описание способа получения верхнего предела и нижнего предела расстояния между рабочим UE и целевым UE, когда DS передается посредством упомянутого выше процесса.
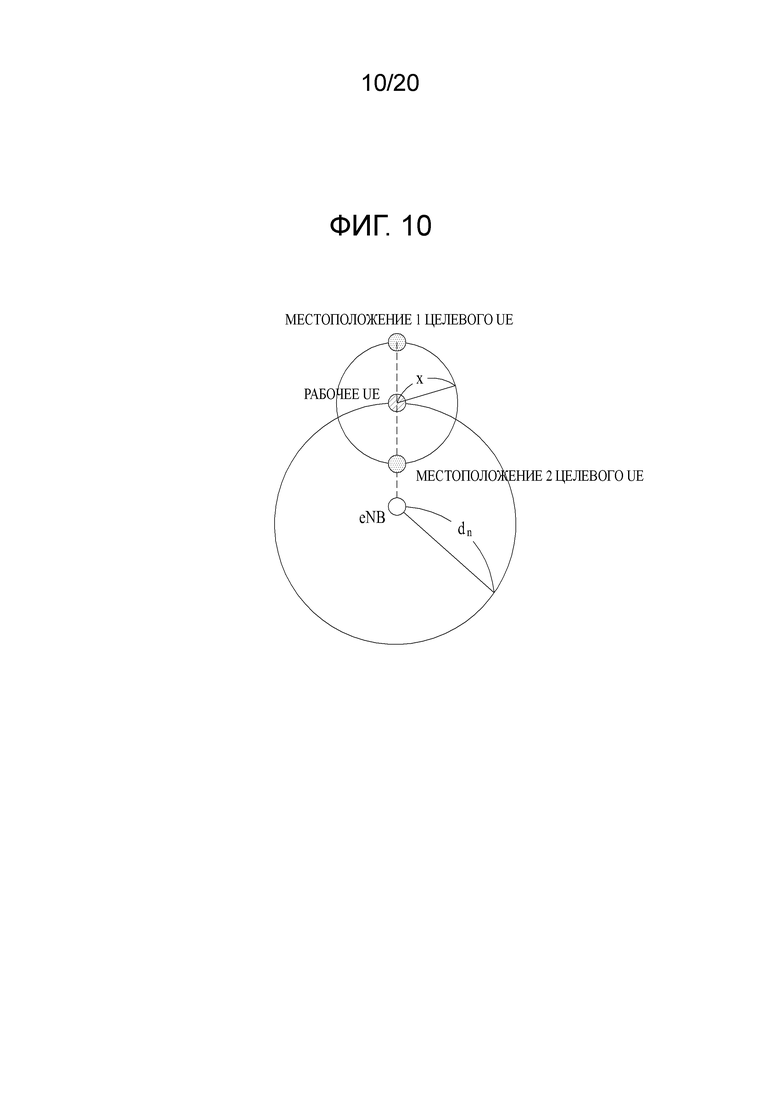
[79] Фиг. 10 изображает области, в которых может быть расположено целевое UE, которые вычислены в соответствии с вариантом воплощения настоящего изобретения. На фиг. 10 предполагается, что x≤dn. Обращаясь к фиг. 10, максимальное значение и минимальное значение времени приема DS целевого UE рабочим UE соответственно оказывается местоположением 1 целевого UE и местоположением 2 целевого UE.
[80] Когда целевое UE расположено в местоположении 1, может быть установлено Уравнение 1.
[81] [Уравнение 1]
[82] un≤tn+dn+x-Fn+x=tn+dn-Fn+2x
[83] Условия для x могут быть получены как представлено в Уравнении 2 путем совершения перестановки в Уравнении 1.
[84] [Уравнение 2]
[85] x≥(un+Fn-tn-dn)/2
[86] Когда целевое UE расположено в местоположении 2, могут быть установлены условия, такие как Уравнение 3. В частности, условия не связаны с x.
[87] [Уравнение 3]
[88] un≥tn+dn-x-Fn+x=tn+dn-Fn
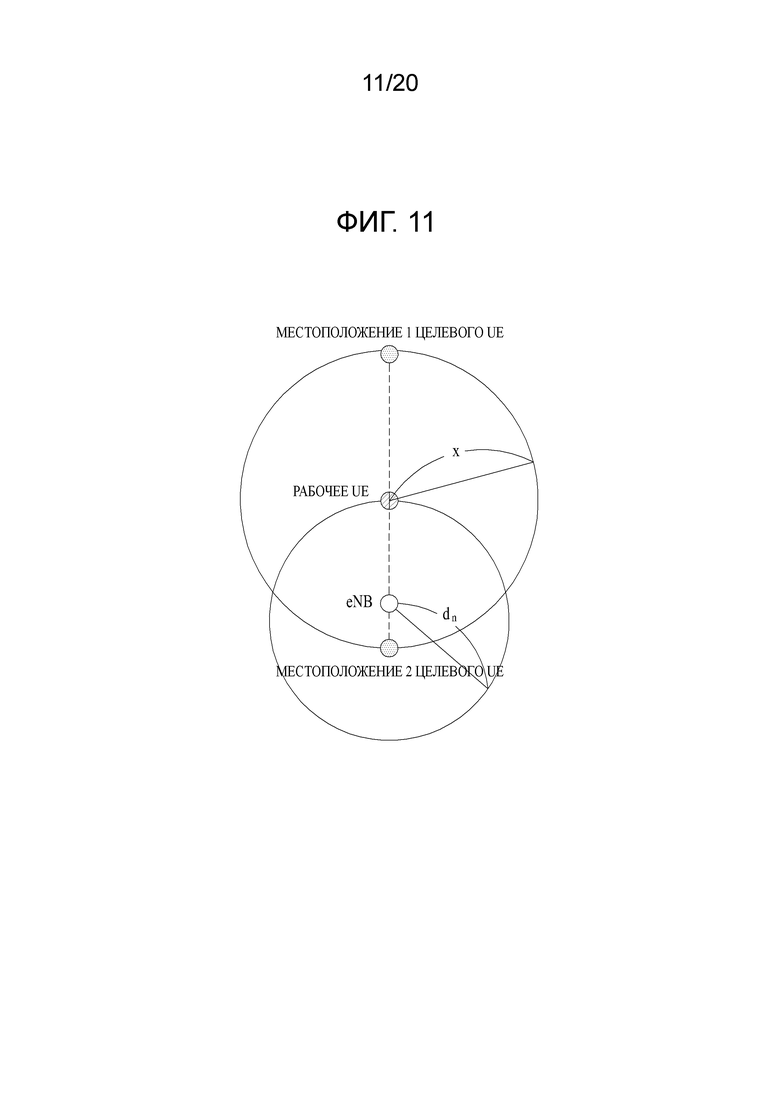
[89] Фиг. 11 изображает области, в которых может быть расположено целевое UE, которые вычислены в соответствии с вариантом воплощения настоящего изобретения. На фиг. 11 предполагается, что x>dn. Обращаясь к фиг. 11, максимальное значение и минимальное значение времени приема DS целевого UE рабочим UE соответственно оказывается местоположением 1 целевого UE и местоположением 2 целевого UE.
[90] Когда целевое UE расположено в местоположении 1, могут быть установлены условия, такие как Уравнение 4.
[91] [Уравнение 4]
[92] un≤tn+dn+x-Fn+x=tn+dn-Fn+2x
[93] Когда целевое UE расположено в местоположении 2, могут быть установлены условия, такие как Уравнение 5.
[94] [Уравнение 5]
[95] un≥tn+x-dn-Fn+x=tn-dn-Fn+2x
[96] Условия для x могут быть получены, как представлено Уравнением 6, путем преобразования Уравнение 5.
[97] [Уравнение 6]
[98] x≤(un+Fn-tn+dn)/2
[99] Из Уравнения 2 и Уравнения 6 задержка x распространения между рабочим UE и целевым UE удовлетворяет условиям Уравнения 7.
[100] [Уравнение 7]
[101] 
[102] В Уравнении 7 un может быть измерено рабочим UE, так как un является временем приема DS рабочим UE, переданного целевым UE, и (tn+dn) также может быть измерено, так как (tn+dn) является временем приема границы подкадра нисходящей линии связи eNBn рабочим UE. Fn является значением, известным рабочему UE, если Fn является ранее зафиксированным значением. Если Fn является значением, указанным eNB целевому UE, eNB может передать значение рабочему UE, или целевое UE может прямо сообщить значение рабочему UE. Например, Fn может быть передан с использованием поля DS.
[103] Рабочее UE может вычислить (tn-dn) путем обнаружения dn на основании измерения значения (tn+dn). Например, рабочее UE может осуществить попытку произвольного доступа к опорным eNBn DS и расценить значение TA, сообщенное eNBn, как двустороннюю задержку (RTD) между рабочим UE и eNBn, то есть 2*dn.
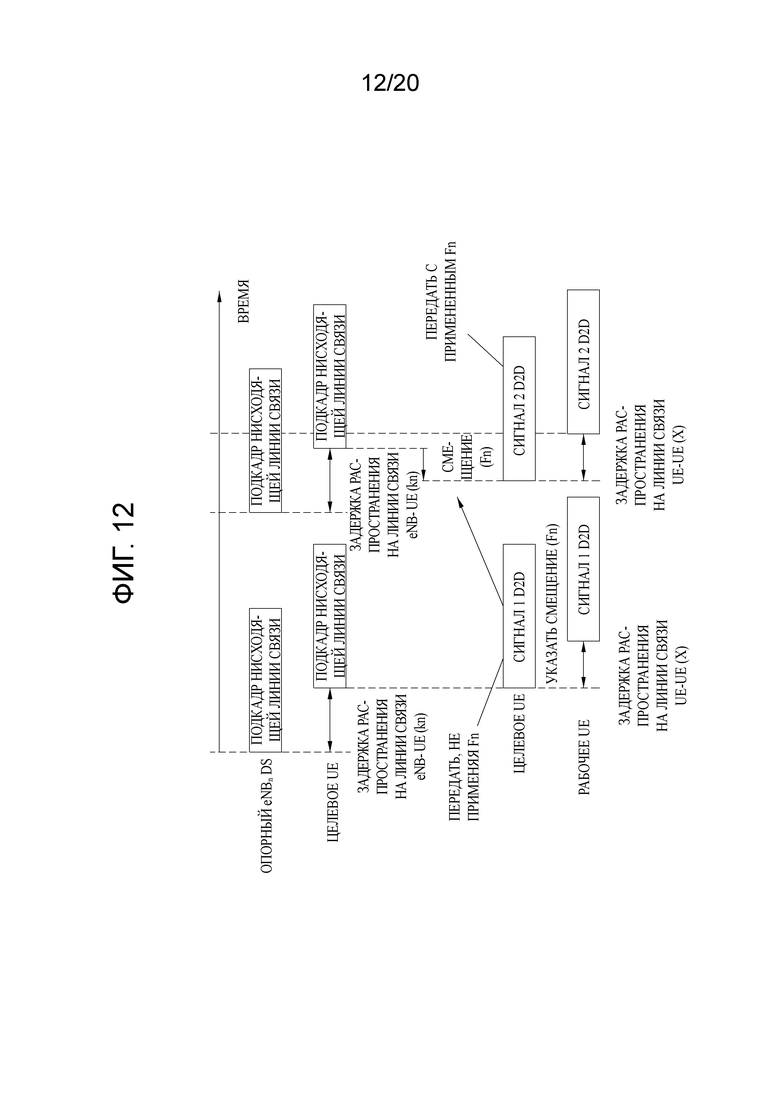
[104] Теперь будет более подробно описан способ для прямого сообщения целевым UE рабочему UE значения Fn. Как было описано выше, целевое UE может передать используемое Fn с использованием поля переданного DS или сигнала D2D. Fn указывает интервал между границей подкадра нисходящей линии связи, принятого целевым UE, который передает сигнал от опорного eNB, и временем передачи сигнала D2D, как описано со ссылкой на фиг. 9.
[105] Здесь может быть желательно передать сигнал D2D, включающий в себя Fn, не применяя к нему Fn. Это желательно потому, что рабочее UE, принимающее сигнал D2D, должно попытаться обнаружить сигнал D2D в очень широкой области времени, чтобы принять сигнал D2D, к которому был применен Fn, пока рабочее UE не знает Fn. Например, целевое UE может передать сигнал D2D, к которому Fn не применен, то есть передать сигнал D2D с Fn равным 0 или значению, ранее известному рабочему UE, и указать Fn, который будет применен рабочим UE к передаче сигналов D2D, с использованием поля сигнала D2D. Рабочее UE пытается принять сигнал D2D, к которому не применен Fn, на основании времени (un на фиг. 9), соответствующего границе подкадра нисходящей линии связи, принятого от опорного eNB, извлекает Fn из обнаруженного сигнала и затем полагает, что Fn был применен к сигналу D2D.
[106] Фиг. 12 изображает пример передачи и приема сигнала с использованием D2D, то есть сигнал D2D в соответствии с вариантом воплощения настоящего изобретения. Обращаясь к фиг. 12, целевое UE может передать сигнал #1 D2D, включающий в себя Fn, не применяя к нему Fn, и затем передать сигнал #2 D2D, применяя к нему Fn.
[107] Рабочее UE может обнаружить верхний предел и нижний предел задержки x распространения между рабочим UE и целевым UE, как было описано выше. Обнаруженные верхний предел и нижний предел могут иметь различные значения для опорных eNB DS. Соответственно, рабочее UE может дополнительно сузить диапазон областей, в которых присутствует x, путем вычисления верхнего предела и нижнего предела x для каждого опорного eNB DS и затем получения пересечения вычисленных областей x. Когда информация о задержке x распространения между рабочим UE и целевым UE получена, задержка x распространения может быть преобразована в расстояние между рабочим UE и целевым UE путем умножения задержки x распространения на скорость распространения электромагнитных волн.
[108] Будет дано описание способа для измерения местоположения целевого UE с использованием информации о местоположении опорного eNB DS и времени приема DS.
[109] Так как un=tn+kn-Fn+x, как было описано выше со ссылкой на фиг. 9, прием DS, переданных из двух точек, одновременно означает, что значения kn+x, вычисленные для двух точек, имеют одинаковое значение с точки зрения рабочего UE. Это будет описано со ссылкой на прилагаемые чертежи.
[110] Фиг. 13 изображает способ для обнаружения местоположения целевого UE в соответствии с вариантом воплощения настоящего изобретения.
[111] Обращаясь к фиг. 13, так как kn+x указывает задержку распространения сигнала, переданного от опорного eNBn DS рабочему UE через целевое UE, местоположение целевого UE, который генерирует тот же самый un, оказывается в форме эллипса, имеющего местоположения опорного eNBn DS и рабочего UE в качестве фокусов. То есть, когда рабочее UE измеряет un и вычисляет kn+x на основании un, рабочее UE может сгенерировать один эллипс и определить, что целевое UE расположено в точке на эллипсе.
[112] Фиг. 14 изображает способ для обнаружения местоположения целевого UE в соответствии с другим вариантом воплощения настоящего изобретения. В частности, фиг. 14 соответствует случаю, в котором эллипсы сформированы для двух опорных eNB DS, и местоположение целевого UE на пересечениях этих двух эллипсов обнаруживается в соответствии с принципом, описанным со ссылкой на фиг. 13.
[113] Фиг. 15 изображает способ для обнаружения местоположения целевого UE в соответствии с другим вариантом воплощения настоящего изобретения. В частности, фиг. 15 соответствует случаю, в котором упомянутая выше операция повторяется для трех опорных eNB DS. Так как существует единственное пересечение трех эллипсов, местоположение целевого UE может быть определено как это местоположение.
[114] Как описано выше, местоположение целевого UE может быть обнаружено путем формирования эллипсов, на которых может быть расположено целевое UE, для двух или более опорных eNB DS. С этой целью рабочее UE запрашивает информацию о местоположении каждого опорного eNB DS. Эта информация может ранее сообщена сетью пользовательскому оборудованию (UE) с помощью такого способа, как широковещание.
[115] Информация о местоположении опорного eNB DS может быть представлена как абсолютные координаты, такие как долгота и широта каждого eNB. В этом случае рабочее UE может обнаружить абсолютные координаты целевого UE. Когда абсолютные координаты не нужны, например, в случае, когда измеряется расстояние между целевым UE и рабочим UE, требуется только взаимное расположение. Например, рабочему UE может быть предоставлена только информация о расстоянии между опорными eNB DS.
[116] Обращаясь к фиг. 15, так как anm указывает расстояние между опорным eNBn DS и опорным eNBm DS, может быть обнаружено взаимное положение каждого eNB, когда целевое UE получает информацию о расстоянии. Даже в этом способе рабочее UE должно обнаруживать расстояние до каждого опорного eNB DS. В этом случае рабочее UE может обнаружить расстояние по TA, полученному в процедуре произвольного доступа, или по сигналу (например, PRS), передаваемому каждым опорным eNB DS.
[117] Если рабочее UE знает о расстоянии между целевым UE и опорным eNB DS, рабочее UE может легко измерить расстояние до целевого UE или обнаружить местоположение целевого UE. Например, предполагается, что сеть уведомляет рабочее UE о расстоянии между целевым UE и конкретным опорным eNB DS, или целевое UE уведомляет рабочее UE о расстоянии между целевым UE и конкретным опорным eNB DS с использованием связи D2D, например, с использованием некоторых битов DS.
[118] Когда Fn, используемое целевым UE для передачи сигнала D2D, задано равным такому же значению, как значение TA, используемое для передачи сигналов восходящей линии связи, и передано рабочему UE через сигнал, напрямую передаваемый и принимаемый между UE, рабочее UE может определить расстояние между целевым UE и опорным eNB DS через Fn. Это происходит потому, что значение TA конкретного UE обычно задано равным значению, соответствующему удвоенной задержке распространения между UE и опорным eNB. То есть рабочее UE может полагать, что значение, полученное, путем деления пополам Fn, сообщенного целевым UE, соответствует задержке распространения между целевым UE и опорным eNB.
[119] Затем, рабочее UE может обнаружить потенциальные местоположения целевого UE по DS, переданному от целевого UE, на основании соответствующего опорного eNB DS, и сократить число потенциальных местоположений целевого UE путем добавления круга, соответствующего расстоянию между опорным eNB DS и целевым UE. Фиг. 16 изображает пример сокращения числа потенциальных местоположений целевого UE путем добавления круга, соответствующего расстоянию между опорным eNB DS и целевым UE в соответствии с вариантом воплощения настоящего изобретения.
[120] Будет дано описание способа для измерения местоположения целевого UE или расстояния до целевого UE с использованием разницы во времени приема DS.
[121] Так как un=tn+kn-Fn+x, как описано на фиг. 9, когда рабочее UE измеряет un и um для DS, которые были переданы целевым UE для двух опорных eNB DS, eNBn и eNBm, рабочее UE может обнаружить расстояния между целевым UE и этими двумя опорными eNB DS с использованием разности между двумя значениями. А именно, un-um=tn-tm+kn-km-Fn+Fm, и общий член, расстояние x между целевым UE и рабочим UE, оттуда исчезает. Рабочее UE распознает Fn и Fm, как было описано выше, или эти два значения могут быть идентичными для удобства работы. В этом случае эти два компонента исчезают.
[122] Информация tn и tm может быть получена из информации о времени, когда целевое UE передает DS на основе каждого опорного eNB DS (например, радиокадр и индекс подкадра), и может предполагаться, что опорные eNB DS синхронизированы в заранее определенной единице времени (например, 1 мс, составляющей подкадр). То есть когда предполагается, что два опорных eNB DS были синхронизированы в 1 мс, рабочее UE может предположить, что границы подкадров нисходящей линии связи, переданных этими двумя опорными eNB DS, соответствуют одному и тому же времени.
[123] В соответствии с этой операцией рабочее UE может вычислить kn-km, соответствующую разности между расстояниями между целевым UE и опорными eNB DS, из un-um.
[124] Фиг. 17 изображает пример измерения местоположения целевого UE или расстояния до целевого UE с использованием разницы во времени приема сигнала DS в соответствии с вариантом воплощения настоящего изобретения.
[125] Обращаясь к фиг. 17, кривая, указывающая потенциальные местоположения целевого UE, формируется на основании информации о местоположении двух опорных eNB DS. Здесь кривая представлена набором точек, в которых разность между расстояниями от этих двух опорных eNB DS является одинаковой. Когда эта операция выполняется для двух других eNB, может быть сформирована другая кривая, и пересечение двух кривых соответствует местоположению целевого UE.
[126] Фиг. 18 изображает другой пример измерения местоположения целевого UE или расстояния до целевого UE с использованием разницы во времени приема сигнала DS в соответствии с вариантом воплощения настоящего изобретения. В частности, фиг. 18 соответствует случаю, в котором измерение расстояния, изображенное на фиг. 17, дополнительно выполняется для eNB2 и eNB3.
[127] На фиг. 17 и 18 рабочее UE должно обнаружить расстояние до каждого опорного eNB DS. Рабочее UE может обнаружить расстояние по TA, полученному в процедуре произвольного доступа, или по сигналу (например, PRS), передаваемому каждым опорным eNB DS, как было описано выше.
[128] Когда предполагается, что рабочее UE принимает непосредственно Fn и Fm от целевого UE и обнаруживает расстояние между целевым UE и каждым опорным eNB DS на основании Fn и Fm, можно измерить расстояние между целевым UE и каждым опорным eNB DS. Потенциальные местоположения целевого UE, полученные с помощью способа, показанного на фиг. 17, могут быть дополнительно сужены с использованием информации о расстоянии между каждым опорным eNB и целевым UE. Фиг. 19 изображает пример измерения расстояния до целевого UE путем обнаружения расстояния между каждым опорным eNB и целевым UE в соответствии с вариантом воплощения настоящего изобретения.
[129] Чтобы получить значения TA относительно соответствующих опорных eNB и соответственно передать значения TA через сигналы D2D, целевое UE должно попытаться осуществить доступ к нескольким eNB. Это может значительно увеличить сложность и заголовки. В этом случае, может использоваться такое же значение Fn, как значение TA, примененное к передаче восходящей линии связи, когда сигнал D2D передается в случае синхронизации с небольшим количеством опорных eNB, тогда как ранее зафиксированное значение, то есть 0 или фиксированное значение, ранее распознанное рабочим UE, может быть задано равным Fn в случае синхронизации с другими опорными eNB. Например, Fn может быть задано равным значению TA, примененному к передаче восходящей линии связи, в случае синхронизации целевого UE с обслуживающей сотой и задано равным 0 в случае синхронизации с другими eNB. Когда Fn передается, может быть сообщено, идентичен ли Fn значению TA, примененному к передаче восходящей линии связи.
[130] Для выполнения вышеупомянутых операций рабочее UE должно определить, какой eNB предполагается целевым UE как опорный eNB DS, и когда целевое UE передает DS. Такая информация может быть передана сетью рабочему UE.
[131] Рабочее UE может вычислить местоположение целевого UE в соответствии с вышеупомянутыми способами. С этой целью сеть может обеспечить информацию о местоположении опорных eNB DS рабочему UE, а рабочее UE может непосредственно вычислить местоположение целевого UE на основании информации о местоположении опорных eNB DS. Альтернативно, для упрощения рабочего UE, рабочее UE может измерить время приема целевого DS UE, соответствующее каждому опорному eNB DS, или разницу времени приема DS целевым UE для конкретной комбинации опорных eNB DS и сообщить о результате измерений сети, в результате чего сеть может обнаружить местоположение целевого UE. В частности, последнее применимо, когда сеть должна обнаруживать местоположение целевого UE через рабочее UE, когда у целевого UE нет возможности обнаружения местоположения.
[132] Фиг. 20 является блок-схемой, изображающей коммуникационное устройство в соответствии с вариантами воплощения настоящего изобретения.
[133] На фиг. 20 коммуникационное устройство 2000 включает в себя процессор 2010, память 2020, радиочастотный (RF) модуль 2030, модуль 2040 дисплея и модуль 2050 пользовательского интерфейса (UI).
[134] Коммуникационное устройство 2000 раскрыто только для иллюстративных целей, и некоторые модули могут быть исключены из коммуникационного устройства 2000 при необходимости. Кроме того, коммуникационное устройство 2000 может дополнительно включать в себя необходимые модули. Некоторые модули коммуникационного устройства 2000 могут быть идентифицированы как более подробные модули. Процессор 2010 выполнен с возможностью выполнения операций вариантов воплощения настоящего изобретения. Для подробностей об операциях процессора 2010 могут делаться ссылки на фиг. 1-19.
[135] Память 2020 соединена с процессором 2010 и хранит операционную систему, приложения, программный код, данные и т.п. RF модуль 2030 соединен с процессором 2010 и преобразовывает основополосный сигнал в радиочастотный (RF) сигнал или преобразовывает RF сигнал в основополосный сигнал. Для этих операций RF модуль 2030 выполняет по порядку аналоговое преобразование, усиление, фильтрацию и преобразование с повышением частоты или выполняет эти операции в обратном порядке. Модуль 2040 дисплея соединен с процессором 2010 и отображает множество информации. Объем или сущность модуля 2040 дисплея настоящего изобретения не ограничивается только этим, и модуль 2040 дисплея может быть любым из известных элементов, например, жидкокристаллическим дисплеем (LCD), cветодиодом (LED), органическим светодиодом (OLED) и т.п. Модуль 1450 пользовательского интерфейса (UI) соединен с процессором 2010, он может быть реализован как комбинация пользовательских интерфейсов, таких как клавиатура, сенсорный экран и т.д.
[136] Специалистам в области техники будет понятно, что задачи, которые могут быть решены с помощью настоящего изобретения, не ограничиваются только тем, что, в частности, было описано выше, и упомянутые выше и другие задачи, которые можно решить с помощью настоящего изобретения, будут более понятны из предшествующего подробного описания, взятого в сочетании с прилагаемыми чертежами. Иллюстративные варианты воплощения, описанные выше, являются комбинациями элементов и признаков настоящего изобретения. Элементы или признаки могут рассматриваться как выборочные, если не указано иное. Каждый элемент или признак может осуществляться без сочетания с другими элементами или признаками. Кроме того, варианты воплощения настоящего изобретения могут быть созданы путем сочетания части элементов и/или признаков. Порядок операций, описанных в вариантах воплощения настоящего изобретения, может быть изменен. Некоторые конструкции или характеристики любого варианта воплощения могут быть включены в другой вариант воплощения и могут быть заменены соответствующими конструкциями или характеристиками другого варианта воплощения. Очевидно, что настоящее изобретение может быть воплощено путем сочетания пунктов формулы изобретения, которые не имеют явно указанной зависимости в прилагаемой формуле изобретения, или может включать в себя новые пункты формулы изобретения в ответе на первичное заключение патентного ведомства после подачи заявки.
[137] Варианты воплощения настоящего изобретения могут быть достигнуты с помощью различных средств, например, аппаратного обеспечения, микропрограммного обеспечением, программного обеспечения или их комбинации. В аппаратной конфигурации варианты воплощения настоящего изобретения могут быть реализованы с помощью одной или нескольких специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров и т.д.
[138] В микропрограммной или программной конфигурации варианты воплощения настоящего изобретения могут быть достигнуты с помощью модуля, процедуры, функции и т.д., выполняющей описанные выше функции или операции. Программный код может храниться в блоке памяти и управляться процессором. Блок памяти расположен внутри или вне процессора и может передавать и принимать данные от процессора с помощью различных известных средств.
[139] Специалистам в области техники будет очевидно, что в настоящем изобретении могут быть сделаны различные модификации и вариации, не отступая от сущности или объема изобретения. Поэтому упомянутое выше подробное описание следует рассматривать только в иллюстративных, а не ограничительных целях. Объем настоящего изобретения должен определяться с помощью рационального анализа формулы изобретения, и все модификации настоящего изобретения в пределах эквивалентных диапазонов находятся в пределах объема настоящего изобретения.
Промышленная применимость
[140] Хотя упомянутый выше способ для передачи и приема синхросигнала для связи D2D в системе беспроводной связи и соответствующий прибор были описаны на основе LTE 3GPP, настоящее изобретение применимо к различным системам беспроводной связи помимо LTE 3GPP.
Изобретение относится к технике связи и может использоваться в системах сотовой связи. Технический результат состоит в повышении пропускной способности передачи сигналов. Для этого раскрыт способ для передачи устройством сигнала для прямой связи устройство-устройство в системе беспроводной связи. В частности, способ содержит этапы, на которых: принимают подкадр нисходящей линии связи от опорной базовой станции; передают первый сигнал партнерскому устройству на основании границы подкадра нисходящей линии связи; и передают второй сигнал партнерскому устройству с заранее определенным смещением до границы подкадра нисходящей линии связи. 2 н. и 10 з.п. ф-лы, 20 ил., 1 табл.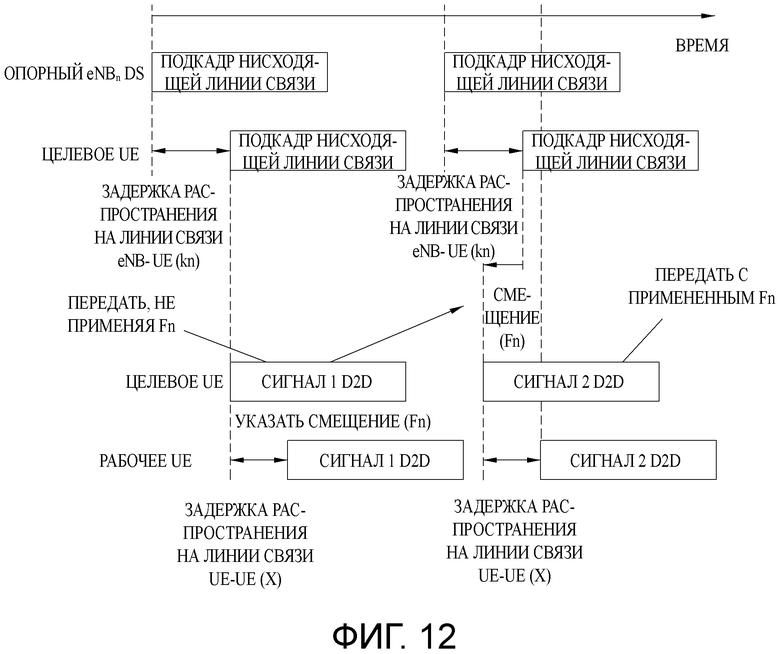
1. Способ передачи сигналов по линии связи устройство-устройство (D2D) в пользовательском оборудовании (UE) в системе беспроводной связи, причем способ содержит этапы, на которых:
передают целевому UE управляющий сигнал для линии связи D2D, включающий в себя значение настройки момента времени для линии связи D2D на основании опорного момента времени, не применяя значение настройки момента времени;
передают сигнал данных для линии связи D2D целевому UE с применением значения настройки момента времени,
при этом значение настройки момента времени для линии связи D2D является таким же, как значение настройки момента времени для восходящей линии связи к базовой станции (BS).
2. Способ по п. 1, дополнительно содержащий этап, на котором:
принимают информацию о значении настройки момента времени для восходящей линии связи от BS.
3. Способ по п. 1, в котором опорный момент времени является моментом времени приема нисходящей линии связи от BS.
4. Способ по п. 3, в котором применение значения настройки момента времени содержит этап, на котором настраивают момент времени передачи линии связи D2D на основании момента приема нисходящей линии связи с помощью значения настройки момента времени.
5. Способ по п. 3, в котором момент времени передачи управляющего сигнала для линии связи D2D выравнивается с моментом времени приема нисходящей линии связи.
6. Способ по п. 4, в котором момент времени приема нисходящей линии связи задерживается по сравнению с моментом времени передачи нисходящей линии связи.
7. Пользовательское оборудование (UE) в системе беспроводной связи, причем UE содержит:
радиочастотный (RF) модуль связи, выполненный с возможностью передачи/приема сигналов к/от базовой станции (BS) по нисходящей линии связи/восходящей линии связи или целевому UE по линии связи устройство-устройство (D2D); и
процессор, выполненный с возможностью обработки сигналов,
при этом процессор выполнен с возможностью управления RF модулем связи для передачи управляющего сигнала для линии связи D2D, включающего в себя значение настройки момента времени для линии связи D2D на основании опорного момента времени, не применяя значение настройки момента времени, целевому UE, и передачи сигнала данных для линии связи D2D целевому UE с применением значения настройки момента времени,
при этом значение настройки момента времени для линии связи D2D является таким же, как значение настройки момента времени для восходящей линии связи.
8. UE по п. 7, в котором процессор управляет RF модулем связи для приема информации о значении настройки момента времени для восходящей линии связи от BS.
9. UE по п. 7, в котором опорный момент времени является моментом времени приема нисходящей линии связи от BS.
10. UE по п. 9, в котором процессор настраивает момент времени передачи линии связи D2D на основании момента времени приема нисходящей линии связи с помощью значения настройки момента времени при применении значения настройки момента времени.
11. UE по п. 9, в котором процессор выравнивает момент времени передачи управляющего сигнала для линии связи D2D с моментом времени приема нисходящей линии связи.
12. UE по п. 11, в котором момент времени приема нисходящей линии связи задержан по сравнению с моментом времени передачи нисходящей линии связи.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОТЧЕТ ОБ ИСПОЛЬЗОВАНИИ РЕСУРСОВ ОБЩЕГО КАНАЛА ПЕРЕДАЧИ ДАННЫХ | 2009 |
|
RU2462834C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

