ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области технологий связи, и в частности, к способу и устройству для выбора привязывающего мастера.
УРОВЕНЬ ТЕХНИКИ
[0002] С наступлением эры мобильного интернета, основное внимание в интернет-индустрии уделяется вопросам социальности, локализации и мобильности. В частности, с распространением мобильных устройств, снабженных интерфейсом беспроводной достоверности (Wireless-Fidelity, Wi-Fi), социальное применение устройства в сетевом соединении на основе сведений о соседях (Neighbor Awareness Networking, NAN) приобретает особую важность в промышленности.
[0003] Сеть NAN, включающая в себя множественные устройства NAN, именуется кластером (Cluster) NAN, и устройства в одном и том же кластере NAN имеют один и тот же идентификатор кластера. Каждое устройство имеет свои собственные атрибуты, включающие в себя: роль (Role) и состояние (State). Роль включает в себя два типа: мастер (Master) и не мастер (non-Master), и состояние включает в себя два типа: синхронизированное (sync) и не синхронизированное (non-sync). Устройство в состоянии синхронизации отвечает за поддержание синхронизация кластера. Мастер должен находиться в состоянии синхронизации, но не мастер может находиться в синхронизированном или не синхронизированном состоянии. Каждое устройство дополнительно включает в себя ранг мастера (Master Rank, MR), мастер с наибольшим MR в кластере NAN становится привязывающим мастером (Anchor Master, AM), и все остальные устройства остаются синхронизированными по времени с AM, что обеспечивает синхронизацию всего кластера NAN.
[0004] Типичный сценарий применения в кластере NAN состоит в том, что устройства осуществляют взаимное обнаружение обслуживания до ассоциирования. Для осуществления обнаружения обслуживания между устройствами, устройство в кластере NAN должно работать на социальном (social) канале NAN в течение конкретного периода времени и поддерживать состояние активное (awake), например, социальный канал на канале частотой 2.4 ГГц является каналом 6. В некоторых сценариях, требуется, чтобы NAN долгое время работала в фоне, и, таким образом, устройство в NAN должно осуществлять энергосберегающее управление. Таким образом, устройство активируется только с наступлением окна обнаружения (Discovery Window, DW), и осуществляет обнаружение обслуживания и синхронизацию кластера на социальном канале; однако за пределами DW, все устройства кроме мастера может находиться в неактивном состоянии.
[0005] Поскольку кварцевые генераторы внутри разных устройств NAN имеют разные частоты, два устройства приходится часто синхронизировать, чтобы гарантировать отсутствие больших расхождений между системными часами двух устройств. Для поддержания синхронизации кластера NAN, каждый мастер и каждый синхронизированный не мастер отправляют кадр маяка синхронизации (Sync Beacon) в DW, причем кадр маяка синхронизации включает в себя информацию AM и информацию функции синхронизации по времени (Time Synchronization Function, TSF), и информация AM включает в себя: ранг привязывающего мастера (Anchor Master Rank, AMR), счетчик переходов (Hop Count to Anchor Master, HC) и время передачи маяка привязывающего мастера (Anchor Master Beacon Transmission Time, AMBTT). AMR является значением MR для AM, и каждое устройство в кластере NAN записывает значение AMR.
[0006] Поскольку эталонном синхронизации в кластере NAN является AM, то есть, мастер с наибольшим MR, и MR изменяется со временем случайным образом при изменении MR устройства, мастер с наибольшим MR в кластере NAN также изменяется. При изменении MR устройства, AM с наибольшим MR можно выбирать во времени в кластере NAN, что критично для поддержания синхронизации кластера NAN. Согласно современному проекту спецификации NAN, в процессе синхронизации кластера NAN, значение AMR, записанное в только устройстве, увеличивается. Однако, с уменьшением MR AM, даже если устройство, MR которого является начальным значением AMR, не существует, начальное значение AMR, записанное в устройстве, всегда существует в кластере NAN и не может быть удалено, и записанное значение HC увеличивается. Согласно существующей спецификации, когда HC в принятом кадре Sync Beacon превышает порог, устройство отвергает кадр Sync Beacon, то есть, с течением времени HC увеличивается, устройства в всем кластере NAN отвергают все принятые кадры Sync Beacon, поскольку HC превышает порог. Кроме того, поскольку кластер NAN теряет AM, весь кластер NAN разрушается, что не позволяет реализовать синхронизацию по времени между устройствами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Варианты осуществления настоящего изобретения предусматривают способ и устройство для выбора привязывающего мастера, которые используются для поддержания синхронизации по времени между устройствами в кластере NAN.
[0008] Для разрешения вышеупомянутой технической проблемы, варианты осуществления настоящего изобретения предусматривают следующие технические решения:
[0009] Согласно первому аспекту, вариант осуществления настоящего изобретения предусматривает способ выбора привязывающего мастера, включающий в себя:
прием, устройством, кадра NAN Beacon маяка сетевого соединения на основе сведений о соседях, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени TSF, и первая информация AM включает в себя: первый ранг привязывающего мастера AMR, первый счетчик переходов HC и первое время передачи маяка привязывающего мастера AMBTT; и устройство записывает вторую информацию AM и вторую информацию TSF, причем вторая информация AM содержит: второй AMR, второй HC и второе AMBTT;
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и ранг мастера MR устройства больше, чем первый AMR, переключение, устройством, роли устройства на AM; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, обновление, устройством, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0010] Согласно первому аспекту, в первом возможном варианте реализации первого аспекта, способ дополнительно включает в себя:
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, переключение устройством роли устройства на AM, или обновление устройством согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0011] Согласно первому аспекту или первому возможному варианту реализации первого аспекта, во втором возможном варианте реализации первого аспекта, до переключения устройством роли устройства на AM и обновления устройством согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве, способ дополнительно включает в себя:
если первый HC меньше или равен порогу счетчика переходов, инициирование, устройством, выполнения этапа переключения, устройством, роли устройства на AM, или инициирование, устройством, выполнения этапа обновления устройством согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0012] Согласно первому аспекту или первому или второму возможному варианту реализации первого аспекта, в третьем возможном варианте реализации первого аспекта, когда устройство является AM, используется ли кадр NAN Beacon для выбора AM, определяется путем:
если первый AMR меньше, чем второй AMR, определения устройством что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения устройством что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет первому условию, определения устройством что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: первый AMR меньше, чем второй AMR, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0013] Согласно первому аспекту или первому или второму возможному варианту реализации первого аспекта, в четвертом возможном варианте реализации первого аспекта, когда устройство является AM, используется ли кадр NAN Beacon для выбора AM, определяется путем:
если первый AMR меньше, чем второй AMR, определения устройством что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, определения устройством что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет второму условию, определения устройством что кадр NAN Beacon используется для выбора AM, причем второе условие состоит в следующем: первый AMR меньше, чем второй AMR, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0014] Согласно первому аспекту или первому или второму возможному варианту реализации первого аспекта, в пятом возможном варианте реализации первого аспекта, когда устройство не является AM, используется ли кадр NAN Beacon для выбора AM, определяется путем:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения устройством, что кадр NAN Beacon не используется для выбора AM;
если первый AMR равен третьему AMR в течение заранее заданного периода времени, определения устройством, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет третьему условию, определения устройством, что кадр NAN Beacon используется для выбора AM, причем третье условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0015] Согласно первому аспекту или первому или второму возможному варианту реализации первого аспекта, в шестом возможном варианте реализации первого аспекта, когда устройство не является AM, используется ли кадр NAN Beacon для выбора AM, определяется путем:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения устройством, что кадр NAN Beacon не используется для выбора AM;
если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени, определения устройством, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет четвертому условию, определения устройством, что кадр NAN Beacon используется для выбора AM, причем четвертое условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0016] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому или шестому возможному варианту реализации первого аспекта, в седьмом возможном варианте реализации первого аспекта, способ дополнительно включает в себя:
если кадр NAN Beacon используется для выбора AM, когда первый AMR больше, чем второй AMR, обновление устройством, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0017] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому или седьмому возможному варианту реализации первого аспекта, в восьмом возможном варианте реализации первого аспекта, обновление устройством, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве, включает в себя:
обновление устройством второго значения AMR до первого значения AMR;
обновление устройством второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление устройством второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление устройством второго значения AMBTT до первого AMBTT; и
обновление устройством значения второй информации TSF до значения первой информации TSF.
[0018] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому или восьмому возможному варианту реализации первого аспекта, в девятом возможном варианте реализации первого аспекта, способ дополнительно включает в себя:
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, если первое AMBTT больше, чем второе AMBTT, или первое AMBTT равно второму AMBTT и первый HC меньше, чем второй HC минус 1, обновление устройством согласно кадру NAN Beacon второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве.
[0019] Согласно девятому возможному варианту реализации первого аспекта, в десятом возможном варианте реализации первого аспекта,
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первое AMBTT больше, чем второе AMBTT, обновление устройством согласно кадру NAN Beacon второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве, включает в себя:
обновление устройством второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление устройством второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление устройством второго значения AMBTT до первого AMBTT; и
обновление устройством значения второй информации TSF до значения первой информации TSF; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и когда первое AMBTT равно второму AMBTT, и первый HC меньше, чем второй HC минус 1, обновление устройством согласно кадру NAN Beacon второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве, включает в себя:
обновление устройством второго значения HC до первого значения HC плюс 1; и
обновление устройством значения второй информации TSF до значения первой информации TSF.
[0020] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому или восьмому возможному варианту реализации первого аспекта, в одиннадцатом возможном варианте реализации первого аспекта, способ дополнительно включает в себя, по меньшей мере, один из следующих этапов:
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второму HC, игнорирование устройством первой информации AM, переносимой в кадре NAN Beacon;
если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon не отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и первое AMBTT больше, чем второе AMBTT, обновление устройством второго значения AMBTT до первого AMBTT, и обновление устройством значения второй информации TSF до значения первой информации TSF;
если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и значение заранее заданного/ых байта/байтов первой информации TSF больше, чем второе AMBTT, обновление устройством второго значения AMBTT до первого AMBTT, и обновление устройством значения второй информации TSF до значения первой информации TSF; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, обновление устройством второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление устройством второго значения AMBTT до первого AMBTT, обновление устройством значения второй информации TSF до значения первой информации TSF, и обновление устройством второго значения HC до первого значения HC плюс 1.
[0021] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому или одиннадцатому возможному варианту реализации первого аспекта, в двенадцатом возможном варианте реализации первого аспекта, способ дополнительно включает в себя:
когда разность, полученная вычитанием второго AMBTT из значения второй информации TSF больше, чем заранее заданный порог времени передачи, переключение устройством роли устройства на AM.
[0022] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому или двенадцатому возможному варианту реализации первого аспекта, в тринадцатом возможном варианте реализации первого аспекта, когда устройство не является AM, и MR устройства обновлен, способ дополнительно включает в себя:
когда обновленный MR устройства больше, чем второй AMR, переключение устройством роли устройства на AM.
[0023] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому или тринадцатому возможному варианту реализации первого аспекта, в четырнадцатом возможном варианте реализации первого аспекта, переключение устройством роли устройства на AM включает в себя:
обновление устройством второго значения AMR до значения MR устройства;
обновление устройством второе значение HC до 0; и
обновление устройством второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов второй информации TSF.
Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому или тринадцатому возможному варианту реализации первого аспекта, в пятнадцатом возможном варианте реализации первого аспекта, переключение устройством роли устройства на AM включает в себя:
обновление устройством второго значения AMR до значения MR устройства;
обновление устройством второе значение HC до 0; и
обновление устройством второго значения AMBTT до 0×00000000.
[0024] Согласно первому аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому, тринадцатому, четырнадцатому или пятнадцатому возможному варианту реализации первого аспекта, в шестнадцатом возможном варианте реализации первого аспекта, когда устройство является AM, способ дополнительно включает в себя:
когда MR устройства обновлен, поддержание устройством роли AM, и обновление устройством записанного второго AMR до обновленного значения MR устройства.
[0025] Согласно второму аспекту, вариант осуществления настоящего изобретения предусматривает устройство для выбора привязывающего мастера, причем устройство включает в себя:
модуль приема кадра маяка, выполненный с возможностью приема кадра NAN Beacon маяка сетевого соединения на основе сведений о соседях, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени TSF, и первая информация AM включает в себя: первый ранг привязывающего мастера AMR, первый счетчик переходов HC и первое время передачи маяка привязывающего мастера AMBTT; и устройство записывает вторую информацию AM и вторую информацию TSF, причем вторая информация AM содержит: второй AMR, второй HC и второе AMBTT;
модуль переключения ролей, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и ранг мастера MR устройства больше, чем первый AMR, переключения роли устройства на AM; и
модуль обновления информации, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0026] Согласно второму аспекту, в первом возможном варианте реализации второго аспекта,
модуль переключения ролей дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, переключения роли устройства на AM; или
модуль обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0027] Согласно второму аспекту или первому возможному варианту реализации второго аспекта, во втором возможном варианте реализации второго аспекта, устройство дополнительно включает в себя:
модуль инициирования выполнения, выполненный с возможностью: если первый HC меньше или равен порогу счетчика переходов, инициирования модуля переключения ролей для выполнения этапа переключения роли устройства на AM, или инициирования модуля обновления информации для выполнения этапа обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0028] Согласно второму аспекту или первому или второму возможному варианту реализации второго аспекта, в третьем возможном варианте реализации второго аспекта, когда устройство является AM, устройство дополнительно включает в себя: первый модуль определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет первому условию, определения, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: первый AMR меньше, чем второй AMR, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0029] Согласно второму аспекту или первому или второму возможному варианту реализации второго аспекта, в четвертом возможном варианте реализации второго аспекта, когда устройство является AM, устройство дополнительно включает в себя: второй модуль определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, когда второй AMR в устройстве обновлен, если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет второму условию, определения, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: второй AMR меньше, чем второй AMR, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0030] Согласно второму аспекту или первому или второму возможному варианту реализации второго аспекта, в пятом возможном варианте реализации второго аспекта, когда устройство не является AM, устройство дополнительно включает в себя: третий модуль определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR равен третьему AMR в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет третьему условию, определения, что кадр NAN Beacon используется для выбора AM, причем третье условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0031] Согласно второму аспекту или первому или второму возможному варианту реализации второго аспекта, в шестом возможном варианте реализации второго аспекта, когда устройство не является AM, устройство дополнительно включает в себя: четвертый модуль определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет четвертому условию, определения, что кадр NAN Beacon используется для выбора AM, причем четвертое условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0032] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому или шестому возможному варианту реализации второго аспекта, в седьмом возможном варианте реализации второго аспекта, модуль обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR больше, чем второй AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0033] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому или седьмому возможному варианту реализации второго аспекта, в восьмом возможном варианте реализации второго аспекта, модуль обновления информации включает в себя:
первый подмодуль обновления AMR, выполненный с возможностью обновления второго значения AMR до первого значения AMR;
первый подмодуль обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1;
первый подмодуль обновления AMBTT, выполненный с возможностью: если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT; и
подмодуль обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF.
[0034] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому или восьмому возможному варианту реализации второго аспекта, в девятом возможном варианте реализации второго аспекта, модуль обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, если первое AMBTT больше, чем второе AMBTT, или первое AMBTT равно второму AMBTT и первый HC меньше, чем второй HC минус 1, обновления, согласно кадру NAN Beacon, второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве.
[0035] Согласно девятому возможному варианту реализации второго аспекта, в десятом возможном варианте реализации второго аспекта,
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первое AMBTT больше, чем второе AMBTT, модуль обновления информации включает в себя:
первый подмодуль обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1;
первый подмодуль обновления AMBTT, выполненный с возможностью: если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT; и
подмодуль обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и когда первое AMBTT равно второму AMBTT, и первый HC меньше, чем второй HC минус 1, модуль обновления информации включает в себя:
первый подмодуль обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1; и
подмодуль обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF.
[0036] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому или восьмому возможному варианту реализации второго аспекта, в одиннадцатом возможном варианте реализации второго аспекта, устройство дополнительно включает в себя, по меньшей мере, один из следующих модулей:
модуль игнорирования кадра маяка, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второму HC, игнорирования первой информации AM, переносимой в кадре NAN Beacon;
первый модуль обновления, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon не отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и первое AMBTT больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT, и обновления значения второй информации TSF до значения первой информации TSF;
второй модуль обновления, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и значение заранее заданного/ых байта/байтов первой информации TSF больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT, и обновления значения второй информации TSF до значения первой информации TSF; и
третий модуль обновления, выполненный с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT, обновления значения второй информации TSF до значения первой информации TSF, и обновления второго значения HC до первого значения HC плюс 1.
[0037] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому или одиннадцатому возможному варианту реализации второго аспекта, в двенадцатом возможном варианте реализации второго аспекта, модуль переключения ролей дополнительно выполнен с возможностью: когда разность, полученная вычитанием второго AMBTT из значения второй информации TSF больше, чем заранее заданный порог времени передачи, переключения роли устройства на AM.
[0038] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому или двенадцатому возможному варианту реализации второго аспекта, в тринадцатом возможном варианте реализации второго аспекта, когда устройство не является AM, и MR устройства обновлен, модуль переключения ролей дополнительно выполнен с возможностью: когда обновленный MR устройства больше, чем второй AMR, переключения роли устройства на AM.
[0039] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому или тринадцатому возможному варианту реализации второго аспекта, в четырнадцатом возможном варианте реализации второго аспекта, модуль переключения ролей включает в себя:
второй подмодуль обновления AMR, выполненный с возможностью обновления второго значения AMR до значения MR устройства;
второй подмодуль обновления HC, выполненный с возможностью обновления второго значение HC до 0; и
второй подмодуль обновления AMBTT, выполненный с возможностью обновления второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов второй информации TSF.
Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому или тринадцатому возможному варианту реализации второго аспекта, в пятнадцатом возможном варианте реализации второго аспекта, модуль переключения ролей включает в себя:
второй подмодуль обновления AMR, выполненный с возможностью обновления второго значения AMR до значения MR устройства;
второй подмодуль обновления HC, выполненный с возможностью обновления второго значение HC до 0; и
второй подмодуль обновления AMBTT, выполненный с возможностью обновления второго значения AMBTT до 0×00000000.
[0040] Согласно второму аспекту или первому, второму, третьему, четвертому, пятому, шестому, седьмому, восьмому, девятому, десятому, одиннадцатому, двенадцатому, тринадцатому, четырнадцатому или пятнадцатому возможному варианту реализации второго аспекта, в шестнадцатом возможном варианте реализации второго аспекта, когда устройство является AM, устройство дополнительно включает в себя:
модуль поддержания роли, выполненный с возможностью: когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до обновленного значения MR устройства.
[0041] Из вышеупомянутых технических решений можно понять, что варианты осуществления настоящего изобретения имеют следующие преимущества:
[0042] Согласно вариантам осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; и если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, во избежание разрушения всего кластера NAN, и гарантировать, что можно реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, во избежание разрушения всего кластера NAN и гарантировать, что можно реализовать синхронизацию по времени между устройствами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0043] Для более наглядного описания технических решений согласно вариантам осуществления настоящего изобретения, ниже кратко представлены прилагаемые чертежи, необходимые для описания вариантов осуществления. Очевидно, что прилагаемые чертежи в нижеследующем описании демонстрируют лишь некоторые варианты осуществления настоящего изобретения, и специалист в данной области техники может вывести другие чертежи из этих прилагаемых чертежей.
[0044] Фиг. 1 - блок-схема процесса способа выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0045] фиг. 2 - схема структуры кадра для кадра NAN Beacon согласно варианту осуществления настоящего изобретения;
[0046] фиг. 3 - блок-схема операций другого способа выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0047] фиг. 4 - блок-схема операций другого способа выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0048] фиг. 5-a - схема процесса обновления информации AM, записанной в каждом устройстве в обычном средстве реализации;
[0049] фиг. 5-b - схема процесса обновления информации AM, записанной в каждом устройстве согласно варианту осуществления настоящего изобретения;
[0050] фиг. 6-a - схема сбора статистики по значению AMR в обычном способе выбора AM;
[0051] фиг. 6-b - схема сбора статистики по значению AMR в способе выбора AM согласно варианту осуществления настоящего изобретения;
[0052] фиг. 6-c - схема увеличенной верхнем части фиг. 6-a;
[0053] фиг. 6-d - схема увеличенной верхнем части фиг. 6-b;
[0054] фиг. 6-e - схема сбора статистики по максимальному MR в сети NAN в обычном способе выбора AM;
[0055] фиг. 6-f - схема сбора статистики по максимальному MR в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения;
[0056] фиг. 6-g - схема сбора статистики по количеству AM в сети NAN в обычном способе выбора AM;
[0057] фиг. 6-h - схема сбора статистики по количеству AM в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения;
[0058] фиг. 6-i - схема сбора статистики по HC в сети NAN в обычном способе выбора AM;
[0059] фиг. 6-j - схема сбора статистики по HC в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения;
[0060] фиг. 6-k - схема сбора статистики по изменению TSF в сети NAN в обычном способе выбора AM;
[0061] фиг. 6-l - схема сбора статистики по изменению TSF в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения;
[0062] фиг. 7-a - структурная схема состава устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0063] фиг. 7-b - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0064] фиг. 7-c - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0065] фиг. 7-d - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0066] фиг. 7-e - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0067] фиг. 7-f - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0068] фиг. 7-g - структурная схема состава модуля обновления информации согласно варианту осуществления настоящего изобретения;
[0069] фиг. 7-h - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0070] фиг. 7-i - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения;
[0071] фиг. 7-j - структурная схема состава модуля переключения ролей согласно варианту осуществления настоящего изобретения; и
[0072] фиг. 8 - структурная схема состава другого устройства для выбора привязывающего мастера согласно варианту осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0073] Варианты осуществления настоящего изобретения предусматривают способ и устройство для выбора привязывающего мастера, которые используются для поддержания синхронизации по времени между устройствами в кластере NAN.
[0074] Для пояснения задач, признаков и преимуществ настоящего изобретения, ниже наглядно описаны технические решения согласно вариантам осуществления настоящего изобретения со ссылкой на прилагаемые чертежи согласно вариантам осуществления настоящего изобретения. Очевидно, описанные ниже варианты осуществления, представляют собой лишь часть, а не все варианты осуществления настоящего изобретения. Все остальные варианты осуществления, полученные специалистом в данной области техники на основе вариантов осуществления настоящего изобретения, подлежат включению в объем защиты настоящего изобретения.
[0075] Термины "первый", "второй" и т.п. в описании изобретения, формуле изобретения и вышеописанных прилагаемых чертежах настоящего изобретения используются для различения между аналогичными объектами и не обязательно используются для описания конкретной последовательности или порядка. Следует понимать, что термины в определенных обстоятельствах являются взаимозаменяемыми и используются лишь для различения объектов с аналогичными атрибутами при описании вариантов осуществления настоящего изобретения. Кроме того, термины "включать в себя" и "иметь" и любые их вариации призваны охватывать неисключающее включение, благодаря чему, процесс, способ, система, продукт или устройство, которое включает в себя несколько блоков, не обязательно ограничивается в явном виде перечисленными блоками, но может включать в себя другие блоки, которые в явном виде не перечислены или которые внутренне присущи такому процессу, способу, продукту или устройству.
[0076] Детали отдельно описаны ниже.
[0077] Вариант осуществления способа выбора привязывающего мастера в настоящем изобретении может применяться к устройству в кластере NAN. Согласно фиг. 1, способ может включать в себя следующие этапы:
[0078] 101. Устройство принимает кадр маяка сетевого соединения на основе сведений о соседях (сетевое соединение на основе сведений о соседях Beacon, NAN Beacon).
[0079] Кадр NAN Beacon несет первую информацию привязывающего мастера (Anchor Master, AM) и первую информацию функции синхронизации по времени (Time Synchronization Function, TSF), и первая информация AM включает в себя: первый ранг привязывающего мастера (Anchor Master Rank, AMR), первый счетчик переходов (Hop Count, HC) и первое время передачи маяка привязывающего мастера (Anchor Master Beacon Transmission Time, AMBTT).
[0080] В этом варианте осуществления настоящего изобретения, устройства в одном и том же кластере NAN имеют один и тот же идентификатор кластера. Каждое устройство имеет свои собственные атрибуты, включающие в себя: роль (Role) и состояние (State). Роль включает в себя два типа: мастер (Master) и не мастер (non-Master), и состояние включает в себя два типа: синхронизированное (sync) и не синхронизированное (non-sync). Устройство в состоянии синхронизации отвечает за поддержание синхронизация кластера. Мастер должен находиться в состоянии синхронизации, но не мастер может находиться в синхронизированном или не синхронизированном состоянии. Каждое устройство дополнительно включает в себя ранг мастера (Master Rank, MR). В этом варианте осуществления настоящего изобретения, MR представляет степень готовности устройства выступать в роли мастера, и MR включает в себя три части:
Master Rank=Master Preference *2^56+Random Factor * 2^48+MAC[5] *2^40 +…+MAC[0].
[0081] Таким образом, MR каждого устройства включает в себя 8-битовое предпочтение мастера (Master Preference), 8-битовый случайный коэффициент (Random Factor) и свой собственный 48- битовый адрес уровня управления доступом к среде (Medium Access Control, MAC). Случайный коэффициент случайным образом изменяется через каждые 120 окон обнаружения (Discovery Window, DW). Для предотвращения трассировки, в качестве MAC-адреса устройства NAN используется локальный (Local) адрес, и каждый локальный MAC-адрес остается неизменным в течение, по меньшей мере, 30 минут. Согласно существующему правилу переключения роли и состояния устройства, устройство с более высоким MR становится мастером. Мастер с наибольшим MR именуется AM, все остальные устройства остаются синхронизированными по времени с AM, что обеспечивает синхронизацию всего кластера NAN. Синхронизация кластера NAN указывает, что TSF всех устройств в кластере поддерживаются одинаковыми. Для синхронизации TSF, все устройства необходимо синхронизировать согласно тактовому сигналу одного и того же эталонного источника, то есть, выбранный AM используется в качестве эталонного источника, и тактовый сигнал другого устройства поддерживает синхронизацию согласно тактовому сигналу AM. Согласно вышеприведенному описанию, поскольку эталоном синхронизации NAN является AM, то есть, мастер с наибольшим MR, и MR изменяется со временем случайным образом при изменении MR устройства, мастер с наибольшим MR в кластере также изменяется. Кластер NAN является свободно распределенной сетью, и, таким образом, при изменении MR устройства, в кластере NAN можно сразу же выбирать верный AM, что критично для поддержания синхронизации кластера NAN.
[0082] Следует отметить, что, синхронизация кластера NAN реализуется путем отправки и приема кадра NAN Beacon. В некоторых вариантах осуществления настоящего изобретения, кадр NAN Beacon, принятый устройством, может, в частности, именоваться кадром маяка синхронизации (Sync Beacon). В некоторых других вариантах осуществления, кадр NAN Beacon, принятый устройством может именоваться кадром маяка обнаружения (Discovery Beacon). Мастер и синхронизированный не мастер по отдельности отправляют кадр Sync Beacon один раз в каждом DW, и мастер отправляет кадр Discovery Beacon через каждые 100 единиц времени (Time Unit, TU) за пределами DW. Это позволяет другому устройству, которое не присоединилось к кластеру NAN, узнавать, когда начнется следующее DW, чтобы присоединиться к кластеру. В данный момент, начальное положение DW, указанное в кластере NAN, фиксировано, например, DW начинается, когда TSF является целым кратным 512 TU. Кадр Sync Beacon и кадр Discovery Beacon являются кадрам с аналогичной структурой кадра, и имеют разные имена только потому, что их положения отправки отличаются. Помимо использования для синхронизации, устройство дополнительно осуществляет переключение роли и состояния согласно принятому кадру Sync Beacon. Ниже описан пример, в котором кадр NAN Beacon, в частности, является кадром Sync Beacon.
[0083] В этом варианте осуществления настоящего изобретения, поскольку кварцевые генераторы внутри разных устройств NAN имеют разные частоты, два устройства приходится часто синхронизировать, чтобы гарантировать отсутствие больших расхождений между системными часами двух устройств. Для поддержания синхронизации кластера NAN, каждый мастер и каждый синхронизированный не мастер отправляет кадр Sync Beacon внутри DW, причем кадр Sync Beacon включает в себя информацию AM и Time Stamp (восемь байтов), и Time Stamp является TSF. Чтобы отличить информацию AM, переносимую в кадре NAN Beacon, от информации AM, записанной в устройстве, которые являются двумя разными фрагментами информации AM, в следующих вариантах осуществления, информация AM, переносимая в кадре NAN Beacon (которая также именуется просто AM, переносимым в кадре), именуется "первой информацией AM", и информация AM, записанная в устройстве (которая также именуется просто записанным AM), именуется "второй информацией AM". Аналогично, AMR, HC и AMBTT которые включены в первую информацию AM, соответственно, именуются "первым AMR", "первым HC" и "первым AMBTT", и AMR, HC и AMBTT которые включены во вторую информацию AM, соответственно, именуются "вторым AMR", "вторым HC" и "вторым AMBTT". Аналогично, в следующих вариантах осуществления, информация TSF, переносимая в кадре NAN Beacon, именуется "первой информацией TSF", и информация TSF, записанная в устройстве, именуется "второй информацией TSF".
[0084] В частности, первая информация AM, переносимая в кадре Sync Beacon, может включать в себя следующее содержание:
первый AMR, то есть, значение MR AM;
первый HC, то есть, количество переходов от текущего устройства NAN к AM, где HC AM равен 0, то есть, можно определить, в зависимости от того, равен ли 0 HC, переносимый в кадре Sync Beacon, является ли устройство AM. Когда HC, переносимый в отправленном кадре Sync Beacon, равен 0, устройство, которое отправляет кадр Sync Beacon, является AM; или когда HC, переносимый в отправленном кадре Sync Beacon больше 0, устройство, которое отправляет кадр Sync Beacon, не является AM; и
первое AMBTT, то есть, значение заранее заданного байта/заранее заданных байтов TSF, когда AM отправляет кадр Sync Beacon, причем, если устройство принимает два кадра Sync Beacon с разными AMBTT, кадр Sync Beacon с более высоким AMBTT рассматривается как последний кадр Sync Beacon.
[0085] В этом варианте осуществления настоящего изобретения, AMBTT указывается следующим образом: AMBTT AM равно 0, то есть, можно определить, в зависимости от того, равно ли 0 AMBTT, переносимое в кадре Sync Beacon, является ли устройство AM. Когда AMBTT, переносимое в отправленном кадре Sync Beacon, равно 0, устройство, которое отправляет кадр Sync Beacon является AM; или когда AMBTT, переносимое в отправленном кадре Sync Beacon, больше 0, устройство, которое отправляет кадр Sync Beacon, не является AM. Таким образом, когда устройство принимает кадр Sync Beacon от AM (что можно определить в зависимости от того, равно ли AMBTT 0 или равно ли HC 0), если AMBTT нуждается в обновлении, последние четыре байта значения поля Time Stamp (TSF) кадра Sync Beacon устанавливаются равными AMBTT, записанному в устройстве; если устройство принимает кадр Sync Beacon от не AM, и если AMBTT нуждается в обновлении, значение AMBTT в кадре Sync Beacon непосредственно устанавливается равным AMBTT, записанному в устройстве.
[0086] Согласно фиг. 2, на фиг. 2 показана схема структуры кадра для кадра NAN Beacon согласно варианту осуществления настоящего изобретения. Каждое поле описано следующим образом:
FC: Frame Control, поле управления кадром, которое занимает два байта (октета);
Duration: поле длительности, которое занимает два байта;
A1-A3: Addresses1-3, поле адресов 1-3, которое отдельно занимает шесть байтов;
Sequence Control: поле управления последовательностью, которое занимает два байта;
Time Stamp: поле Time Stamp, которое занимает восемь байтов;
Beacon Interval: поле интервала маяка, которое занимает два байта;
Capability: поле способности, которое занимает два байта;
NAN IE: NAN Information Element, информационный элемент сетевого соединения на основе сведений о соседях, где var является зарезервированным словом и используется для задания переменной; и
FCS: Frame Check Sequence, последовательность проверки кадра, которая занимает четыре байта.
[0087] Кадр NAN Beacon от каждого мастера и каждого синхронизированного не мастера является широковещательным сообщением, которое можно получать путем прослушивания другим устройством. Как описано на этапе 101 в этом варианте осуществления настоящего изобретения, устройство может принимать кадр NAN Beacon.
[0088] Следует отметить, что в этом варианте осуществления настоящего изобретения, устройство кластера которое принимает кадр NAN Beacon, сравнивает информацию AM, переносимую в кадре NAN Beacon, с информацией AM, записанной в устройстве, для определения, обновлять ли информацию AM и производить ли синхронизацию с Time Stamp в кадре NAN Beacon. Как описано выше, от AM поступает информация тактового сигнала, и, таким образом, синхронизация осуществляется в всем кластере NAN с использованием AM в качестве эталона.
[0089] Следует отметить, что в этом варианте осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, устройство может получать информацию AM, переносимую в кадре, из кадра NAN Beacon, и может определять, согласно информации AM, переносимой в кадре NAN Beacon, может ли использоваться кадр NAN Beacon для выбора AM. В случае, когда кадр NAN Beacon может использоваться для выбора AM, последующие этапы могут продолжать выполняться, и в случае, когда кадр NAN Beacon не используется для выбора AM, первая информация AM, переносимая в кадре NAN Beacon, может не обрабатываться. Например, первая информация AM, переносимая в кадре NAN Beacon, игнорируется. В этом варианте осуществления настоящего изобретения, устройство может определять, используется ли кадр NAN Beacon для выбора AM. В случае, когда кадр NAN Beacon нельзя использовать для выбора AM, первая информация AM, переносимая в кадре NAN Beacon, игнорируется, поэтому первая информация AM, переносимая в кадре NAN Beacon, не участвует в выборе AM, что позволяет избегать проблемы, состоящей в том, что при уменьшении значения MR AM в кластере NAN, в кластере NAN всегда существует начальное значение AMR, которое не может быть удалено. AM, который действительно обеспечивает значение AMR, всегда может существовать в кластере NAN, что позволяет гарантировать функцию синхронизации по времени между устройствами.
[0090] Устройство определяет, используется ли принятый кадр NAN Beacon для выбора AM, выбирает кадр, который может использоваться для выбора AM из всех принятых кадров NAN Beacon, и осуществляет последующую обработку только на кадре NAN Beacon, который можно использовать для выбора AM.
[0091] В частности, в некоторых вариантах осуществления настоящего изобретения, для различения, является ли само устройство AM, определение устройством используется ли кадр NAN Beacon для выбора AM, может обрабатываться в разных вариантах реализации, которые отдельно описаны ниже.
[0092] Когда устройство является AM, используется ли кадр NAN Beacon для выбора AM, определяется следующим образом:
[0093] A11. Если первый AMR меньше, чем второй AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0094] A12. Если первый AMR больше или равен второму AMR, и если первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве.
[0095] A13. Если кадр NAN Beacon не удовлетворяет первому условию, устройство определяет, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: первый AMR меньше, чем второй AMR, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0096] Кроме того, когда устройство является AM, используется ли кадр NAN Beacon для выбора AM, можно определить следующим образом:
[0097] A21. Если первый AMR меньше, чем второй AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0098] A22. Если первый AMR больше или равен второму AMR, и если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0099] A23. Если кадр NAN Beacon не удовлетворяет второму условию, устройство определяет, что кадр NAN Beacon используется для выбора AM, причем второе условие состоит в следующем: первый AMR меньше, чем второй AMR, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0100] В некоторых вариантах осуществления настоящего изобретения, устройство может определять соотношение значений между первым AMR и вторым AMR, то есть, устройство может определять, меньше ли первый AMR, чем второй AMR, причем первый AMR является AMR, переносимым в кадре NAN Beacon, и второй AMR является AMR, записанным в устройстве. Когда устройство является AM, первый AMR меньше, чем второй AMR на этапах A11 и A21, то есть, AMR, записанный в устройстве, больше, чем AMR, переносимый в кадре NAN Beacon, и первая информация AM, переносимая в кадре NAN Beacon, игнорируется. В этом случае, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0101] Когда устройство является AM, устройство определяет, что первый AMR больше или равен второму AMR; и когда второй AMR, записанный в устройстве, обновляется, AMR до обновления второго AMR в устройстве является третьим AMR. Если устройство находится в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, равен ли первый AMR третьему AMR. Если устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно выполнять этап A12, то есть, когда устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно определять, равен ли первый AMR третьему AMR. На этапе A12, только при одновременном выполнении трех условий: устройство является AM, первый AMR больше или равен второму AMR, и первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, устройство может определить, что принятый кадр NAN Beacon не используется для выбора AM. Кроме того, в этом варианте осуществления настоящего изобретения, значение заранее заданного периода времени необходимо определять согласно конкретному сценарию применения. Например, значение заранее заданного периода времени может составлять несколько DW; или может не описываться с использованием DW. Например, значение заранее заданного периода времени равно N мс или N TU/TU.
[0102] После того, как устройство определяет условие, при котором принятый кадр NAN Beacon не используется для выбора AM, в любом случае за исключением того, когда кадр NAN Beacon не используется для выбора AM, устройство может определить, что кадр NAN Beacon используется для выбора AM. Таким образом, на этапе A13, "первое условие" задается в случае, когда устройство является AM; когда кадр NAN Beacon не удовлетворяет первому условию, устройство может определить, что принятый кадр NAN Beacon может использоваться для выбора AM. В частности, первое условие составляет: (a) или (b):
[0103] (a). Первый AMR меньше, чем второй AMR.
[0104] (b). Первый AMR равен третьему AMR в течение заранее заданного периода времени после обновления второго AMR, записанного в устройстве.
[0105] Тот факт, что кадр NAN Beacon не удовлетворяет первому условию, может означать, что кадр NAN Beacon не удовлетворяет ни (a), ни (b). Тот факт, что (a) не выполняется, означает, что первый AMR больше или равен второму AMR. (b) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первый AMR не равен третьему AMR. Если не выполняется ни (a), ни (b), считается, что кадр NAN Beacon не удовлетворяет первому условию. Таким образом, когда устройство является AM, и кадр NAN Beacon не удовлетворяет первому условию, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0106] Когда устройство является AM, устройство определяет, что первый AMR больше или равен второму AMR, и когда второй AMR, записанный в устройстве, обновляется, если устройство находится в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, меньше ли первое AMBTT, чем второе AMBTT; или если устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно выполнять этап A22, то есть, когда устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно определять меньше ли первое AMBTT, чем второе AMBTT. На этапе A22, только при одновременном выполнении трех условий: устройство является AM, первый AMR больше или равен второму AMR, первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, устройство может определить, что принятый кадр NAN Beacon не используется для выбора AM. Кроме того, в этом варианте осуществления настоящего изобретения, значение заранее заданного периода времени необходимо определять согласно конкретному сценарию применения. Например, значение заранее заданного периода времени может составлять несколько DW; или может не описываться с использованием DW. Например, значение заранее заданного периода времени равно N мс или N TU/TU.
[0107] После того, как устройство определяет условие, при котором принятый кадр NAN Beacon не используется для выбора AM, в любом случае за исключением того, когда кадр NAN Beacon не используется для выбора AM, устройство может определить, что кадр NAN Beacon используется для выбора AM. Таким образом, на этапе A23, "второе условие" задается в случае, когда устройство является AM; когда кадр NAN Beacon не удовлетворяет второму условию, устройство может определить, что принятый кадр NAN Beacon может использоваться для выбора AM. В частности, второе условие составляет: (a) или (c):
[0108] (a). Первый AMR меньше, чем второй AMR.
[0109] (c). Первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после обновления второго AMR, записанного в устройстве.
[0110] Тот факт, что кадр NAN Beacon не удовлетворяет второму условию, может означать, что кадр NAN Beacon не удовлетворяет ни (a), ни (c). Тот факт, что (a) не выполняется, означает, что первый AMR больше или равен второму AMR. (c) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первое AMBTT больше или равно второму AMBTT. Если не выполняется ни (a), ни (c), считается, что кадр NAN Beacon не удовлетворяет второму условию. Таким образом, когда устройство является AM, и кадр NAN Beacon не удовлетворяет второму условию, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0111] Например, если само устройство является AM, первое значение AMR, переносимое в кадре NAN Beacon, принятом устройством, равно 7, второй AMR, записанный в устройстве, равен 10, AMR, записанный в устройстве, равен 7 до обновления до 10, и значение заранее заданного периода времени равно 5 DW, устройство отдельно осуществляет определение согласно условиям в первом условии: 7<10, то есть, (a) выполняется, и устройство определяет, что кадр NAN Beacon не используется для выбора AM; если текущее устройство находится в пределах 3 DW, что меньше, чем значение 5 DW заранее заданного периода времени, и первый AMR равен третьему AMR, (b) выполняется, и устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0112] Когда устройство не является AM, используется ли кадр NAN Beacon для выбора AM, определяется следующим образом:
[0113] B11. Если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0114] B12. Если первый AMR равен третьему AMR в течение заранее заданного периода времени, устройство определяет, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве.
[0115] B13. Если кадр NAN Beacon не удовлетворяет третьему условию, устройство определяет, что кадр NAN Beacon используется для выбора AM, причем третье условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0116] Кроме того, когда устройство не является AM, используется ли кадр NAN Beacon для выбора AM, можно определить следующим образом:
[0117] B21. Если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0118] B22. Если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени, устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0119] B23. Если кадр NAN Beacon не удовлетворяет четвертому условию, устройство определяет, что кадр NAN Beacon используется для выбора AM, причем четвертое условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0120] В некоторых вариантах осуществления настоящего изобретения, когда второй AMR в устройстве обновлен, сначала определяется, входит ли время, в котором находится устройство, в заранее заданный период времени после обновления второго AMR. Если устройство находится в течение заранее заданного периода времени, устройство может определять соотношение значений между первым AMR и вторым AMR, то есть, устройство может определять, меньше ли первый AMR, чем второй AMR, причем первый AMR является AMR, переносимым в кадре NAN Beacon, и второй AMR является AMR, записанным в устройстве. Когда устройство не является AM, первый AMR меньше, чем второй AMR на этапах B11 и B21, то есть, AMR, записанный в устройстве, больше, чем AMR, переносимый в кадре NAN Beacon, и первая информация AM, переносимая в кадре NAN Beacon, игнорируется. В этом случае, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0121] Когда устройство не является AM, и когда второй AMR, записанный в устройстве, обновляется, AMR до обновления второго AMR в устройстве является третьим AMR. Если устройство находится в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, равен ли первый AMR третьему AMR; или если устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно выполнять этап B12, то есть, когда устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно определять, равен ли первый AMR третьему AMR. На этапе B12, только при одновременном выполнении двух условий: устройство не является AM, и первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, устройство может определить, что принятый кадр NAN Beacon не используется для выбора AM. Кроме того, в этом варианте осуществления настоящего изобретения, значение заранее заданного периода времени необходимо определять согласно конкретному сценарию применения. Например, значение заранее заданного периода времени может составлять несколько DW; или может не описываться с использованием DW. Например, значение заранее заданного периода времени равно N мс или N TU/TU.
[0122] После того, как устройство определяет условие, при котором принятый кадр NAN Beacon не используется для выбора AM, в любом случае за исключением того, когда кадр NAN Beacon не используется для выбора AM, устройство может определить, что кадр NAN Beacon используется для выбора AM. Таким образом, на этапе B13, "третье условие" задается в случае, когда устройство не является AM; когда кадр NAN Beacon не удовлетворяет третьему условию, устройство может определить, что принятый кадр NAN Beacon может использоваться для выбора AM. В частности, третье условие составляет: (d) или (e):
[0123] (d). Первый AMR меньше, чем второй AMR в течение заранее заданного периода времени.
[0124] (e). Первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0125] Тот факт, что кадр NAN Beacon не удовлетворяет третьему условию может означать, что кадр NAN Beacon не удовлетворяет ни (d), ни (e). (d) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первый AMR больше или равен второму AMR. (e) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первый AMR не равен третьему AMR. Если не выполняется ни (d), ни (e), считается, что кадр NAN Beacon не удовлетворяет третьему условию. Таким образом, когда устройство является AM, и кадр NAN Beacon не удовлетворяет третьему условию, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0126] Когда устройство не является AM, и когда второй AMR, записанный в устройстве, обновляется, AMR до обновления второго AMR в устройстве является третьим AMR. если устройство находится в течение заранее заданного периода времени после начала обновления второго AMR, устройство определяет, меньше ли первое AMBTT, чем второе AMBTT; или если устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно выполнять этап B22, то есть, когда устройство находится в другом времени за пределами заранее заданного периода времени, устройству не нужно определять меньше ли первое AMBTT, чем второе AMBTT. На этапе B22, только при одновременном выполнении двух условий: устройство не является AM, и первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, устройство может определить, что принятый кадр NAN Beacon не используется для выбора AM. Кроме того, в этом варианте осуществления настоящего изобретения, значение заранее заданного периода времени необходимо определять согласно конкретному сценарию применения. Например, значение заранее заданного периода времени может составлять несколько DW; или может не описываться с использованием DW. Например, значение заранее заданного периода времени равно N мс или N TU/TU.
[0127] После того, как устройство определяет условие, при котором принятый кадр NAN Beacon не используется для выбора AM, в любом случае за исключением того, когда кадр NAN Beacon не используется для выбора AM, устройство может определить, что кадр NAN Beacon используется для выбора AM. Таким образом, на этапе B23, "четвертое условие" задается в случае, когда устройство не является AM; когда кадр NAN Beacon не удовлетворяет четвертому условию, устройство может определить, что принятый кадр NAN Beacon может использоваться для выбора AM. В частности, четвертое условие составляет: (d) или (f):
[0128] (d). Первый AMR меньше, чем второй AMR в течение заранее заданного периода времени.
[0129] (f). Первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0130] Тот факт, что кадр NAN Beacon не удовлетворяет четвертому условию может означать, что кадр NAN Beacon не удовлетворяет ни (d), ни (f). (d) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первый AMR больше или равен второму AMR. (f) может не выполняться в двух случаях: устройство не находится в течение заранее заданного периода времени; и устройство находится в течение заранее заданного периода времени, но первое AMBTT больше или равно второму AMBTT. Если не выполняется ни (d), ни (f), считается, что кадр NAN Beacon не удовлетворяет четвертому условию. Таким образом, когда устройство является AM, и кадр NAN Beacon не удовлетворяет четвертому условию, устройство может определить, что кадр NAN Beacon не используется для выбора AM.
[0131] Например, если само устройство не является AM, первое значение AMR, переносимое в кадре NAN Beacon, принятом устройством, равно 7, второй AMR, записанный в устройстве, равен 10, AMR, записанный в устройстве, равен 7 до обновления до 10, и значение заранее заданного периода времени равно 5 DW, устройство отдельно осуществляет определение согласно условиям во втором условии: если текущее устройство находится в пределах 3 DW, устройство все еще находится в заранее заданном периоде времени, и 7<10, то есть, (d) выполняется, и устройство определяет, что кадр NAN Beacon не используется для выбора AM; и если текущее устройство находится в 3 DW, что меньше, чем значение 5 DW заранее заданного периода времени, и первый AMR равен третьему AMR, (e) выполняется, и устройство определяет, что кадр NAN Beacon не используется для выбора AM.
[0132] Следует отметить, что в этом варианте осуществления настоящего изобретения, в случае, когда устройство определяет, что кадр NAN Beacon не используется для выбора AM, устройство может игнорировать первую информацию AM, переносимую в кадре NAN Beacon. В случае, когда устройство определяет, что кадр NAN Beacon используется для выбора AM, устройству по-прежнему нужно определять соотношение значений между первым AMR и вторым AMR, и определять соотношение значений между MR устройства и первым AMR. Существует три результата для определения, устройством, соотношения значений между первым AMR и вторым AMR: (1) Первый AMR больше, чем второй AMR. (2) Первый AMR равен второму AMR. (3) первый AMR меньше, чем второй AMR. Существует три результата для определения, устройством, соотношения значений между MR и первым AMR: (1) MR больше, чем первый AMR. (2) MR меньше, чем первый AMR. (3) MR равен первому AMR. Только в случае, когда кадр NAN Beacon используется для выбора AM, этап 102 и этап 103 выполняется отдельно согласно результату определения.
[0133] 102. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM.
[0134] Устройство записывает вторую информацию AM, причем вторая информация AM включает в себя: второй AMR, второй HC и второе AMBTT.
[0135] В этом варианте осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, в случае, когда кадр NAN Beacon используется для выбора AM, при одновременном выполнении двух условий: первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM.
[0136] В некоторых вариантах осуществления настоящего изобретения, устройство переключает свою собственную роль в кластере NAN на AM согласно требованию переключения роли в кластере NAN при одновременном выполнении двух условий: первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR.
[0137] Следует отметить, что, в случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN; таким образом, первоначальный AMR в кластере NAN также перезаписывается, даже если MR AM уменьшается, всегда существует устройство, MR которого является значением AMR. Таким образом, в кластере NAN всегда существует AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0138] В частности, на этапе 102, процедура, в которой устройство переключает роль устройства на AM, может, в частности, включать в себя следующие этапы:
[0139] C1. Устройство обновляет второе значение AMR до значения MR устройства.
[0140] C2. Устройство обновляет второе значение HC до 0.
[0141] C3. Устройство обновляет второе значение AMBTT до значения заранее заданного байта/заранее заданных байтов второй информации TSF.
[0142] Этапы C1, C2 и C3 служат для обновления второй информации AM, записанной в устройстве, чтобы отдельно обновлять второй AMR, второй HC и второе AMBTT, которые записаны в устройстве. Например, когда устройство NAN становится AM, устройство устанавливает информацию AM, записанную в устройстве, путем: установления второго AMR устройства на свой собственный MR; установления второго HC устройства на 0; и установления второго AMBTT устройства на 0×00000000. Значение заранее заданного/ых байта/байтов второй информации TSF может быть значением последних четырех байтов или значением последних пяти байтов второй информации TSF, и заранее заданный/е байт/байты второй информации TSF может/гут быть установлен/ы согласно конкретному сценарию применения.
[0143] 103. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0144] В этом варианте осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, в случае, когда кадр NAN Beacon используется для выбора AM, при одновременном выполнении двух условий: первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0145] В некоторых вариантах осуществления настоящего изобретения, согласно требованию к обновлению информации AM и информации TSF в кластере NAN, при одновременном выполнении двух условий: первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0146] Следует отметить, что, когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, всегда существует устройство, MR которого является значением AMR. Таким образом, в кластере NAN всегда существует AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0147] В частности, на этапе 103, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
[0148] D1. Устройство обновляет второе значение AMR до первого значения AMR.
[0149] D2. Устройство обновляет второе значение HC до первого значения HC плюс 1.
[0150] D3. Если кадр NAN Beacon отправлен AM, устройство обновляет второе значение AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, устройство обновляет второе значение AMBTT до первого AMBTT.
[0151] D4. Устройство обновляет значение второй информации TSF до значения первой информации TSF.
[0152] Этапы D1, D2, D3 и D4 служат для обновления второй информации AM и второй информации TSF, которые записаны в устройстве, чтобы отдельно обновлять второй AMR, второй HC, второе AMBTT и вторую информацию TSF, которые записаны в устройстве.
[0153] Следует отметить, что в некоторых других вариантах осуществления настоящего изобретения, способ выбора привязывающего мастера может дополнительно включать в себя следующий этап:
[0154] E1. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, устройство переключает роль устройства на AM; или
[0155] E2. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0156] В частности, на этапе E1, процедура, в которой устройство переключает роль устройства на AM, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до значения MR устройства;
обновление, устройством, второе значение HC до 0; и
обновление, устройством, второго значения AMBTT до значения заранее заданного/ых байта/байтов второй информации TSF.
[0157] Вышеприведенное описание посвящено обновлению всей информации из второй информации AM, записанной в устройстве, чтобы отдельно обновлять второй AMR, второй HC и второе AMBTT, которые записаны в устройстве. Например, когда устройство NAN становится AM, устройство устанавливает информацию AM, записанную в устройстве, путем: установления второго AMR устройства на свой собственный MR; установления второго HC устройства на 0; и установления второго AMBTT устройства на 0×00000000. Значение заранее заданного/ых байта/байтов второй информации TSF может быть значением последних четырех байтов или значением последних пяти байтов второй информации TSF, и заранее заданный/е байт/байты второй информации TSF может/гут быть установлен/ы согласно конкретному сценарию применения. Для варианта реализации осуществления переключения роли устройством, обратимся к описанию вышеописанного этапа 102, и детали здесь повторно не описаны. Различие между этапом 102 и этапом E1 заключается в выполнении условия для переключения роли устройства на AM устройством.
[0158] В частности, на этапе E2, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до первого значения AMR;
обновление, устройством, второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление, устройством, второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление, устройством, второго значения AMBTT до первого AMBTT; и
обновление, устройством, значения второй информации TSF до значения первой информации TSF.
[0159] Вышеописанные этапы служат для обновления второй информации AM и второй информации TSF, которые записаны в устройстве, чтобы отдельно обновлять второй AMR, второй HC, второе AMBTT и вторую информацию TSF, которые записаны в устройстве. В отношении того, как обновлять, устройством, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, обратимся к описанию вышеописанного этапа 103, и детали здесь повторно не описаны. Различие между этапом 103 и этапом E2 заключается в выполнении условия для обновления, устройством, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0160] На основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, всегда существует устройство, MR которого является значением AMR. Таким образом, в кластере NAN всегда существует AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, всегда существует устройство, MR которого является значением AMR. Таким образом, в кластере NAN всегда существует AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0161] Согласно фиг. 3, способ выбора привязывающего мастера, предусмотренный в другом варианте осуществления настоящего изобретения, может, в частности, включать в себя следующие этапы:
[0162] 301. Устройство принимает кадр NAN Beacon.
[0163] Кадр NAN Beacon несет первую информацию AM и первую информацию TSF, причем первая информация AM включает в себя: первый AMR, первый HC и первое AMBTT.
[0164] В этом варианте осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, устройство может получать первый HC, переносимый в кадре NAN Beacon из кадра NAN Beacon, и устройство может определять соотношение значений между первым HC и заранее заданным порогом счетчика переходов. Когда первый HC больше, чем заранее заданный порог счетчика переходов, выполняется этап 302. Когда первый HC меньше или равен заранее заданному порогу счетчика переходов, устройство может определять, согласно информации AM, переносимой в кадре NAN Beacon, может ли использоваться кадр NAN Beacon для выбора AM. В случае, когда кадр NAN Beacon может использоваться для выбора AM, последующие этапы могут продолжать выполняться, например, выполнение этапа 303 и этапа 304 инициируется по отдельности.
[0165] Следует отметить, что в некоторых других вариантах осуществления настоящего изобретения, помимо выполнения этапа 303 и этапа 304, способ выбора привязывающего мастера может дополнительно включать в себя следующие этапы:
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, устройство переключает роль устройства на AM;
или
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0166] Вся информация из второй информации AM, записанной в устройстве может обновляться, и второй AMR, второй HC и второе AMBTT, которые записаны в устройстве, обновляются по отдельности. Например, когда устройство NAN становится AM, устройство устанавливает информацию AM, записанную в устройстве, путем: установления второго AMR устройства на свой собственный MR; установления второго HC устройства на 0; и установления второго AMBTT устройства на 0×00000000. Значение заранее заданного байта/заранее заданных байтов второй информации TSF может быть значением последних четырех байтов или значением последних пяти байтов второй информации TSF, и заранее заданный/е байт/байты второй информации TSF может/гут быть установлен/ы согласно конкретному сценарию применения. Для обновления второй информации AM и второй информации TSF, которые записаны в устройстве, в частности, второй AMR, второй HC, второй AMBTT и вторая информация TSF, которые записаны в устройстве, могут обновляться по отдельности. Для обновления, устройством, второй информации AM и второй информации TSF, которые записаны в устройстве, следует обратиться к описанию вышеописанного этапа 103, и детали здесь повторно не описаны.
[0167] Следует отметить, что, в этом варианте осуществления настоящего изобретения, в случае, когда устройство определяет, что кадр NAN Beacon не используется для выбора AM, устройство может игнорировать первую информацию AM, переносимую в кадре NAN Beacon. В случае, когда устройство определяет, что кадр NAN Beacon используется для выбора AM, устройству по-прежнему нужно определить соотношение значений между первым AMBTT и вторым AMBTT. Существует три результата для определения, устройством, соотношения значений между первым AMBTT и вторым AMBTT: (1) Первое AMBTT больше, чем второе AMBTT. (2) Первое AMBTT равно второму AMBTT. (3) Первое AMBTT меньше, чем второе AMBTT. Устройству также требуется определить соотношение значений между первым HC и вторым HC, и существует два результата для определения, устройством, соотношения значений между первым HC и вторым HC: (1) Первый HC меньше, чем второй HC минус 1. (2) Первый HC больше, чем второй HC минус 1. Этапы 305, 306 и 307 продолжают выполняться отдельно согласно разности каждого результата определения.
[0168] 302. Если первый HC больше, чем заранее заданный порог счетчика переходов, устройство отвергает кадр NAN Beacon, и если кадр NAN Beacon отвергнут, другой этап, описанный ниже, не подлежит выполнению.
[0169] Когда первый HC больше, чем заранее заданный порог счетчика переходов, кадр NAN Beacon, принятый устройством является негодным кадром, и устройство может отвергать кадр NAN Beacon.
[0170] 303. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM.
[0171] 304. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0172] 305. Если кадр NAN Beacon используется для выбора AM, когда первый AMR больше, чем второй AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0173] Следует отметить, что, одно и то же действие выполняется устройством на этапе 304 и этапе 305, то есть, вторая информация AM и вторая информация TSF, которые записаны в устройстве обновляются согласно кадру NAN Beacon, но условия выполнения действия устройством отличаются на этапе 304 и этапе 305.
[0174] 306. Если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первое AMBTT больше, чем второе AMBTT, устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве.
[0175] Существует два случая, когда устройству нужно обновлять, согласно кадру NAN Beacon, информацию, записанную в устройстве: первый случай, когда обновляются вторая информация TSF и некоторая информация из второй информации AM; второй случай, когда обновляются вторая информация TSF и вся информация из второй информации AM.
[0176] В частности, на этапе 306, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление, устройством, второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление, устройством, второго значения AMBTT до первого AMBTT; и
обновление, устройством, значения второй информации TSF до значения первой информации TSF.
[0177] Кроме того, в некоторых других вариантах осуществления настоящего изобретения, на этапе 306, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до первого значения AMR;
обновление, устройством, второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление, устройством, второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление, устройством, второго значения AMBTT до первого AMBTT; и
обновление, устройством, значения второй информации TSF до значения первой информации TSF.
[0178] Следует отметить, что различие между двумя вариантами реализации заключается в том, нуждается ли в обновлении второе значение AMR, записанное в устройстве. В частности, один из двух вариантов реализации можно выбирать согласно сценарию применения.
[0179] 307. Если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и когда первое AMBTT равно второму AMBTT, и первый HC меньше, чем второй HC минус 1, устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве.
[0180] Существует два случая, когда устройству нужно обновлять, согласно кадру NAN Beacon, информацию, записанную в устройстве: первый случай, когда обновляются вторая информация TSF и некоторая информация из второй информации AM; второй случай, когда обновляются вторая информация TSF и вся информация из второй информации AM.
[0181] В частности, на этапе 307, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения HC до первого значения HC плюс 1; и
обновление, устройством, значения второй информации TSF до значения первой информации TSF.
[0182] Кроме того, в некоторых других вариантах осуществления настоящего изобретения, на этапе 307, процедура, в которой устройство обновляет, согласно кадру NAN Beacon, вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до первого значения AMR;
обновление, устройством, второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление, устройством, второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление, устройством, второго значения AMBTT до первого AMBTT; и
обновление, устройством, значения второй информации TSF до значения первой информации TSF.
[0183] Следует отметить, что различие между двумя вариантами реализации заключается в том, нужно ли обновлять второе значение AMR и второе значение AMBTT, которые записаны в устройстве. В частности, один из двух вариантов реализации можно выбирать согласно сценарию применения.
[0184] Следует отметить, что, в некоторых вариантах осуществления настоящего изобретения, один или более этапов из этапа 302 и этапов 305-307, в частности, могут выполняться. Для конкретной ситуации выполнения, необходимо обратить внимание на то, выполняется ли условие, необходимое на каждом этапе, которое описано здесь только в иллюстративном порядке в этом варианте осуществления.
[0185] На основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше или равен первому AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше или равен первому AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0186] Согласно фиг. 4, способ выбора привязывающего мастера, предусмотренный в другом варианте осуществления настоящего изобретения, может, в частности, включать в себя следующие этапы:
[0187] 401. Устройство принимает кадр NAN Beacon.
[0188] Кадр NAN Beacon несет первую информацию AM и первую информацию TSF, причем первая информация AM включает в себя: первый AMR, первый HC и первое AMBTT.
[0189] В этом варианте осуществления настоящего изобретения, после того, как устройство принимает кадр NAN Beacon, устройство может определять, согласно информации AM, переносимой в кадре NAN Beacon, может ли использоваться кадр NAN Beacon для выбора AM. В случае, когда кадр NAN Beacon может использоваться для выбора AM, последующие этапы могут продолжать выполняться, например, выполнение этапа 402 и этапа 403 инициируется по отдельности.
[0190] Следует отметить, что в этом варианте осуществления настоящего изобретения, в случае, когда устройство определяет, что кадр NAN Beacon не используется для выбора AM, устройство может игнорировать первую информацию AM, переносимую в кадре NAN Beacon. В случае, когда устройство определяет, что кадр NAN Beacon используется для выбора AM, Устройству также требуется определить соотношение значений между первым HC и второй HC. Существует три результата для определения, устройством, меньше ли первый HC, чем второй HC: (1) Первый HC больше или равен второму HC. (2) Первый HC равен второму HC минус 1. (3) Первый HC меньше, чем второй HC минус 1. Устройству по-прежнему нужно определить соотношение значений между первым AMBTT и второе AMBTT, и существует три результата для определения, устройством, соотношения значений между первым AMBTT и вторым AMBTT: (1) Первое AMBTT больше, чем второе AMBTT. (2) Первое AMBTT равно второму AMBTT. (3) Первое AMBTT меньше, чем второе AMBTT. Затем, соответственно, выполняются этапы 404, 405 и 406 согласно разности каждого результата определения.
[0191] В некоторых других вариантах осуществления настоящего изобретения, устройство может дополнительно определять, больше ли разность, полученная вычитанием второго AMBTT, записанного в устройстве, из значения второй информации TSF, чем заранее заданный порог времени передачи, и определяет, согласно результату определения, выполнять ли следующий этап:
[0192] Когда разность, полученная вычитанием второго AMBTT из значения второй информации TSF больше, чем заранее заданный порог времени передачи, переключение, устройством, роли устройства на AM.
[0193] Кроме того, переключение, устройством, роли устройства на AM может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до значения MR устройства;
обновление, устройством, второе значение HC до 0; и
обновление, устройством, второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов второй информации TSF.
[0194] Когда MR устройства обновлен, этап 407 и этап 408 могут, соответственно, выполняться в зависимости от того, является ли само устройство AM, и результата определения, устройством, больше ли обновленный MR, чем записанный AMR.
[0195] 402. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM.
[0196] 403. Если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве.
[0197] 404. Если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второй HC, устройство игнорирует первую информацию AM, переносимую в кадре NAN Beacon.
[0198] 405. Если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon не отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и первое AMBTT больше, чем второе AMBTT, устройство обновляет второе значение AMBTT до первого AMBTT, и устройство обновляет значение второй информации TSF до значения первой информации TSF.
[0199] Кроме того, в некоторых других вариантах осуществления настоящего изобретения, этап 405 можно дополнительно заменить следующим этапом:
[0200] Если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и значение заранее заданного байта/заранее заданных байтов первой информации TSF больше, чем второе AMBTT, устройство обновляет второе значение AMBTT до первого AMBTT, и устройство обновляет значение второй информации TSF до значения первой информации TSF.
[0201] 406. Если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, устройство обновляет второе значение AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, устройство обновляет второе значение AMBTT до первого AMBTT, устройство обновляет значение второй информации TSF до значения первой информации TSF, и устройство обновляет второе значение HC до первого значения HC плюс 1.
[0202] 407. Когда устройство не является AM, и MR устройства обновлен, когда обновленный MR устройства больше, чем второй AMR, устройство переключает роль устройства на AM.
[0203] 408. Когда устройство является AM, и когда MR устройства обновляется, устройство поддерживает роль AM, и устройство обновляет записанный второй AMR до обновленного значения MR устройства.
[0204] Следует отметить, что на вышеописанных этапах 402 и 407 устройством выполняется одно и то же действие, то есть, устройство переключает роль устройства на AM, но условия выполнения действия устройством на этапах 402 и 407 отличаются. В этом случае, процедура, в которой устройство переключает роль устройства на AM, может, в частности, включать в себя следующие этапы:
обновление, устройством, второго значения AMR до значения MR устройства;
обновление, устройством, второе значение HC до 0; и
обновление, устройством, второго значения AMBTT до значения заранее заданного/ых байта/байтов второй информации TSF.
[0205] Следует отметить, что в некоторых вариантах осуществления настоящего изобретения может выполняться, в частности, один или более этапов из этапов 404-408. Для конкретной ситуации выполнения, необходимо обратить внимание на то, выполняется ли условие, необходимое на каждом этапе, которое описано здесь только в иллюстративном порядке в этом варианте осуществления.
[0206] На основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше или равен первому AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше или равен первому AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0207] Чтобы лучше понять и реализовать вышеописанные решения в этом варианте осуществления настоящего изобретения, в дальнейшем, для подробного описания, в порядке примера используется соответствующий сценарий применения.
[0208] Практический сценарий применения используется в дальнейшем для описания обычного способа выбора AM и способа выбора AM, предусмотренного в этом варианте осуществления настоящего изобретения, для обоснования преимущества способа, предусмотренного в этом варианте осуществления настоящего изобретения во избежание разрушения всего кластера NAN и для обеспечения синхронизации по времени между устройствами.
[0209] Следует отметить, что, как описано в следующем варианте осуществления, кадр Sync Beacon используется в порядке примера для описания, rx*** используется для представления значения, переносимого в кадре Sync Beacon, принятом устройством, и my*** используется для представления значения самого устройства или значения, записанного в устройстве.
[0210] В современном проекте спецификации NAN, способ осуществления выбора AM, в целом, задан для каждого устройства NAN:
[0211] Когда устройство принимает кадр Sync Beacon, и когда rxHC кадра Sync Beacon не превышает заранее заданный порог счетчика переходов, устройство осуществляет обработку согласно следующему алгоритму; и если rxHC превышает заранее заданный порог счетчика переходов, кадр Sync Beacon отвергается. Обычный алгоритм описан следующим образом:
если записанное значение AMR выше, чем значение AMR, переносимое в кадре Sync Beacon, информация AM, переносимая в кадре Sync Beacon, игнорируется; и
если записанное значение AMR ниже, чем значение AMR, переносимое в кадре Sync Beacon, устройство NAN использует AMR, HC плюс 1 и AMBTT, которые присутствуют в кадре Sync Beacon, в качестве записанных значений в записи информации AM устройства, то есть, выполняются следующие этапы:
обновление myAMR: myAMR=rxAMR, устройство заменяет значение AMR, записанное в устройстве, значением AMR, переносимым в кадре Sync Beacon;
обновление myHC: myHC=rxHC+1;
обновление myAMBTT: myAMBTT=rxAMBTT; и
обновление myTSF: myTSF=rxTSF, то есть, устройство заменяет значение TSF, записанное в устройстве, значением поля Time Stamp, переносимым в кадре Sync Beacon.
[0212] Если записанное значение AMR равно значению AMR в кадре Sync Beacon, устройство NAN сравнивает HC, записанный в устройстве, с HC в кадре Sync Beacon согласно следующим правилам:
[0213] Если значение HC в кадре Sync Beacon больше или равно записанному HC, устройство NAN игнорирует информацию AM в кадре Sync Beacon;
если значение HC в кадре Sync Beacon равно записанному HC минус 1, и значение AMBTT в кадре Sync Beacon больше, чем значение AMBTT в записанной информации AM, устройство NAN использует значение AMBTT в кадре Sync Beacon в качестве значения AMBTT, записанного в устройстве; и
если значение HC в кадре Sync Beacon ниже, чем записанный HC минус 1, устройство NAN использует HC плюс 1 в кадре Sync Beacon в качестве значения HC, записанного в устройстве, и обновляет AMBTT в записи информации AM устройства NAN согласно следующим правилам:
если принятый кадр Sync Beacon отправлен AM, AMBTT в текущий записанной информации AM устанавливается на значение нижних четырех байтов поля Time Stamp в принятом кадре Sync Beacon; и
если принятый кадр Sync Beacon исходит от устройства мастера NAN или синхронизированного не мастера, AMBTT в текущий записанной информации AM устанавливается на соответствующее значение атрибута кластер NAN в принятом кадре Sync Beacon.
[0214] Согласно обычному варианту реализации, описанному выше, случай уменьшения значения MR AM описан с использованием нижеследующего примера.
[0215] Как показано на фиг. 5-a, фиг. 5-a является схемой процесса обновления информации AM, записанной в каждом устройстве согласно варианту осуществления настоящего изобретения. Как показано на фиг. 5-a, фиг. 5-a является схемой процесса обновления информации AM, записанной в каждом устройстве согласно варианту осуществления настоящего изобретения.
[0216] Предполагается, что начальные MR четырех устройств NAN A, B, C и D равны, соответственно, 10, 6, 3 и 8, и, таким образом, A является AM. Два соседних узла могут следить друг за другом и получать отправленный кадр Sync Beacon, то есть, A может принимать кадр Sync Beacon, отправленный B, B может принимать кадр Sync Beacon, отправленный A или C, C может принимать кадр Sync Beacon, отправленный B или D, и D может принимать кадр Sync Beacon, отправленный C.
[0217] Каждое устройство в кластере NAN поддерживает переменную AM_timer, которая представляет период действия текущего AMBTT. При каждом обновлении AMBTT, значение AM_timer сбрасывается на 16, которое представляет, что период действия равен 16 DW. AM_timer поддерживаемый в устройстве, осуществляет отсчет путем вычитания, и когда AM_timer уменьшается до 0, устройство становится AM, причем предполагается, что обновление MR и вычитание 1 из AM_timer происходят в начале DW.
[0218] Предполагается, что MR A изменяется от 10 до 7 в конкретный момент; в этом случае, реальным AM в сети NAN является устройство D. В этом случае, устройство A по-прежнему устанавливает само устройство A на AM, изменяет AMR до 7, и затем отправляет кадр Sync Beacon. После приема кадра Sync Beacon, поскольку AMR в нем равен 7, что меньше, чем 10, записанное в B, B не обновляет AMR. Затем B отправляет кадр Sync Beacon, и, после приема кадра Sync Beacon, A находит, что AMR в кадре Sync Beacon равен 10, что больше, чем 7, записанное в A. Таким образом, A обновляет свое собственное состояние согласно кадру Sync Beacon, то есть, A устанавливает AMR, записанный в A, равным 10, и устанавливает HC равным 2. В этом случае, AMR, поддерживаемые в A и B, равны 10, и HC, поддерживаемые в A и B, равны, соответственно, 2 и 1; и C и D остаются неизменными.
[0219] После 15 DW, устройства B, C и D изменяются сами на AM, поскольку AM_timer изменяется до 0 (причем поддерживаемые AMR изменяются до своих собственных MR соответственно, и HC равны 0), и затем отправляют кадры Sync Beacon. A также отправляет кадр Sync Beacon. Согласно принятому кадру Sync Beacon, каждое устройство обновляет свое собственное состояние согласно вышеописанному алгоритму. В этом случае, AMR, записанные в A и B, равны 10, и HC равны, соответственно, 2 и 3; и AMR, поддерживаемые в C и D, равны 8. В следующем DW, C принимает кадр Sync Beacon от B. Поскольку AMR (=10) B больше, чем AMR (=8) C, согласно вышеописанному алгоритму, C обновляет состояние согласно кадру, причем записанный AMR изменяется до 10, и HC изменяется до 4; и после еще одного DW, D принимает кадр Sync Beacon от C. Аналогично, D обновляет свое собственное состояние согласно кадру, причем записанный AMR изменяется до 10, и HC изменяется до 5. До сих пор, AMR, поддерживаемые в четырех устройствах, все равны 10, но HC равны, соответственно, 4, 3, 4 и 5. После этого, вышеописанный процесс повторяется. В этом процессе, AMR, записанные в большинстве устройств в сети, равны 10, но HC постоянно увеличиваются, пока MR устройства не изменится до значения, большего 10. Например, если MR C изменяется до 15, после нескольких DW, AMR всех устройств в сети изменяются до 15, и HC также увеличиваются с C в качестве центра. В вышеописанном процессе, значение AMR, записанное в устройстве в сети NAN, только увеличивается, даже если устройство, MR которого равен этому значению, не существует, всегда существует старое значение AMR в сети NAN и не может быть удалено, и записанное значение HC увеличивается. Согласно вышеприведенному содержанию, когда HC в принятом кадре Sync Beacon превышает порог, кадр Sync Beacon отвергается. Это означает, что, с течением времени, HC увеличиваются, и устройства в всем кластере NAN отвергают принятые кадры Sync Beacon, поскольку HC превышают порог, и в то же время, поскольку AM утрачивается в кластере NAN, весь кластер NAN разрушается, что не позволяет реализовать синхронизацию по времени между устройствами.
[0220] Способ выбора привязывающего мастера, предусмотренный в этом варианте осуществления настоящего изобретения, в дальнейшем описан с использованием примера.
[0221] Следует отметить, что, как описано в следующем варианте осуществления, кадр Sync Beacon используется в порядке примера для описания, rx*** используется для представления значения, переносимого в кадре Sync Beacon, принятом устройством, и my*** используется для представления значения самого устройства или значения, записанного в устройстве.
[0222] В этом варианте осуществления настоящего изобретения, способ осуществления выбора AM задается следующим образом:
когда MR не AM обновляется, и новый MR больше, чем AMR, записанный в не AM, сам не AM становится AM: myAMR=myMR, myHC=0, и myAMBTT=0; и когда MR устройства AM изменяется, идентификатор AM поддерживается, но записанный AMR изменяется до обновленного значения;
когда myAMBTT, который превышает заранее заданный порог времени передачи (который в данный момент указан как 16 DW), не обновляется, само устройство становится AM: myAMR=myMR, myHC=0, и myAMBTT=0; и
если значение rxHC счетчика переходов, переносимое в кадре Sync Beacon, превышает заранее заданный порог счетчика переходов, кадр отвергается, причем тот факт, что принятый кадр Sync Beacon не используется для выбора AM, в основном, включает в себя следующий случаи:
[0223] (1) Если устройство является AM, и принятый кадр Sync Beacon удовлетворяет условию rxAMR < myAMR, кадр Sync Beacon не используется для выбора AM.
[0224] (2) В течение заранее заданного периода времени после изменения AMR, записанного в устройстве (AMR до обновления обозначается как OldAMR), если rxAMR в принятом кадре Sync Beacon равен OldAMR устройства, или когда rxAMR < myAMR, кадр Sync Beacon не используется для выбора AM.
[0225] Кадр Sync Beacon, который не удовлетворяет ни одному из вышеописанных условий, может использоваться для выбора AM.
[0226] В этом варианте осуществления настоящего изобретения, когда принятый кадр Sync Beacon можно использовать для выбора AM, выбор привязывающего мастера можно реализовать с использованием следующего алгоритма:
if rxAMR > myAMR
обновить myAMR&myHC&TSF&myAMBTT;
elseif rxAMR == myAMR
if rxAMBTT > myAMBTT
обновить myHC&TSF&myAMBTT;
elseif rxAMBTT == myAMBTT
if rxHC< myHC - 1
обновить myHC&TSF;
end
end
else
if rxAMR >= myMR
обновить myAMR&myHC&TSF&myAMBTT;
else
myAMR=myMR;
myHC=0;
myAMBTT=0;
end
end
[0227] Согласно способу выбора привязывающего мастера, описанному в вышеприведенном варианте осуществления и предусмотренному в настоящем изобретении, и случай уменьшения значения MR AM описан с использованием нижеследующего примера.
[0228] Как показано на фиг. 5-b, фиг. 5-b является схемой процесса обновления информации AM, записанной в каждом устройстве согласно варианту осуществления настоящего изобретения. Предполагается, что начальные MR четырех устройств NAN A, B, C и D равны, соответственно, 10, 6, 8 и 9, и, таким образом, A является AM. Два соседних узла могут следить друг за другом и получать отправленный кадр Sync Beacon, то есть, A может принимать кадр Sync Beacon, отправленный B, B может принимать кадр Sync Beacon, отправленный A или C, C может принимать кадр Sync Beacon, отправленный B или D, и D может принимать кадр Sync Beacon, отправленный C.
[0229] На фиг. 5-b, начальное условие четырех устройств A, B, C и D аналогично представленному на фиг. 5-a, то есть, A является AM. Предполагается, что MR A изменяется от 10 до 7 в конкретный момент, и, таким образом, AMR A также изменяется на 7. Если кадр Sync Beacon отправляется от A раньше, чем от B, когда кадр принимается B, согласно алгоритму, предусмотренному в этом варианте осуществления настоящего изобретения, MR (=6) B меньше, чем rxAMR (=7) A, и, таким образом, B осуществляет обновление согласно состоянию A, причем новый AMR равен 7, и HC равен 1; и если кадр Sync Beacon отправляется от B раньше, чем от A, когда A принимает кадр, поскольку rxAMR (=10) такой же, как OldAMR (=10) A, кадр не используется для выбора AM. Это позволяет избежать перезаписи нового AMR старым AMR.
[0230] Затем кадр Sync Beacon, отправленный B, принимается C, согласно алгоритму, предусмотренному в этом варианте осуществления настоящего изобретения, C становится AM. C продолжает отправлять кадр Sync Beacon, который принимается B и D; согласно алгоритму, предусмотренному в этом варианте осуществления настоящего изобретения, D становится AM, и B обновляет состояние согласно кадру Sync Beacon, отправленному C. После этого, D отправляет кадр Sync Beacon; поскольку AMR (=9) D является наибольшим, состояние D принимается C и отправляется в кадре Sync Beacon в следующем DW, пока не завершится обновление всех узлов во всей сети NAN.
[0231] В этом варианте осуществления настоящего изобретения, в течение заранее заданного периода времени после изменения AMR, записанного в устройстве (AMR до обновления записывается как OldAMR), если rxAMR в принятом кадре Sync Beacon равен OldAMR устройства, или когда rxAMR < myAMR, кадр Sync Beacon не используется для выбора AM. Таким образом, внутри каждого устройства необходимо поддерживать две переменные: OldAMR и OldAMR_timer. Первая записывает значение AMR до обновления, и последняя является таймером. При каждом изменении AMR, записанного в устройстве, таймер сбрасывается на заранее заданное значение (например, N DW/DW), и затем осуществляет отсчет времени путем вычитания, пока таймер не изменится до 0.
[0232] Результат выбора процесса выполнения выбора AM переносятся в кадре Sync Beacon, отправленном устройством NAN в состоянии синхронизации, и, в принципе, каждое устройство имеет равную возможность войти в состояние синхронизации; таким образом, алгоритм выбора AM внутри устройства можно косвенно изучать, формулируя соответствующее условие и обнаруживая кадр Sync Beacon, отправленный устройством, и, таким образом, алгоритм выбора AM, описанный в этом варианте осуществления настоящего изобретения, является обнаружимым.
[0233] Обычный алгоритм выбора AM (в дальнейшем именуемый первоначальным решением) и алгоритм выбора AM, предусмотренный в этом варианте осуществления настоящего изобретения (в дальнейшем именуемый новым решением) отдельно описаны в вышеописанных примерах, и сравнение моделей осуществляется между первоначальным решением и новым решением в следующем разделе, для описания преимущества нового решения.
[0234] 1. Модельная гипотеза
[0235] Область моделирования представляет собой круглую область радиусом 500 м, и в этой области равномерно распределены 253 устройства NAN. Передаваемая мощность устройства равна 20 дБм, и модель затухания канала имеет вид (L представляет потери на трассе):
 .
.
[0236] Предполагается, что полоса линии связи равна 20 МГц, чувствительность приемника устройства равна -92 дБм, уровень шума равен -96 дБм, и порогом приема является SINR>0 дБм; посредством вычисления согласно вышеприведенной формуле, можно получать, что дальность связи устройства составляет приблизительно 250 м.
[0237] При моделировании нового решения, значение сброса OldAMR_timer равно 5 DW.
[0238] Время моделирования равно 1000 DW, и дрейф тактовый сигнал равен U (-25, 25) ppm, где U представляет равномерное распределение. Обновление MR и вычитательный отсчет AM_timer происходят в начале DW. Все диаграммы моделирования наблюдаются за пределами DW.
[0239] 2. Сравнение производительности
[0240] 2.1 AMR, записанный в устройстве
[0241] Наибольший MR во всем кластере NAN изменяется с MR устройства, и, таким образом, AMR, записанный в каждом устройстве, также должен изменяться соответственно. Согласно фиг. 6-a и фиг. 6-b, фиг. 6-a и фиг. 6-b, соответственно, являются схемами сбора статистики по значению AMR в обычном способе выбора AM и в способе выбора AM согласно варианту осуществления настоящего изобретения. На фиг. 6-a и фиг. 6-b, по горизонтальной оси отложен индекс окна обнаружения (DW Index), и по вертикальной оси отложен ранг привязывающего мастера (Anchor Master Rank) в устройстве NAN (устройстве). Можно понять, сравнивая AMR, записанный в каждом устройстве, в первоначальном решении, с AMR в новом решении, что, очевидно, первоначальное решение обуславливает разные AMR, записанные в устройствах в сети NAN, и новое решение является относительно "чистым", и AMR, записанный в каждом устройстве, имеет одно и то же значение в большинстве случаев, что позволяет гарантировать возможность осуществления синхронизации по времени между устройствами.
[0242] Дополнительно, фиг. 6-c получена путем увеличения верхней части фиг. 6-a, и фиг. 6-d получена путем увеличения верхней части фиг. 6-b. На фиг. 6-c и фиг. 6-d, по горизонтальной оси отложен индекс окна обнаружения (DW Index), и по вертикальной оси отложен ранг привязывающего мастера (Anchor Master Rank) в устройстве NAN (устройстве). Сравнивая две фигуры, фиг. 6-c и фиг. 6-d, можно обнаружить, что AMR, записанный в устройстве в первоначальном решении изменяется один раз спустя относительно долгое время, но AMR, записанный в устройстве в новом решении изменяется более часто. Согласно фиг. 6-e, фиг. 6-e является схемой сбора статистики по наибольшему MR в сети NAN в обычном способе выбора AM. Как показано на фиг. 6-f, фиг. 6-f является схемой статистики по наибольшему MR в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения. На фиг. 6-e и фиг. 6-f, по горизонтальной оси отложен индекс окна обнаружения (DW Index), и по вертикальной оси отложен наибольший ранг мастера (Max Master Rank) в устройстве NAN (устройстве). Согласно статусу изменения наибольших MR в сетях NAN на фиг. 6-e и фиг. 6-f, можно обнаружить, что AMR, записанный в устройстве в новом решении, в основном, согласуется с изменением наибольшего MR в сети NAN, но AMR, записанный в устройстве в первоначальном решении, не может сохраняться с изменением наибольшего MR в сети NAN.
[0243] 2.2. Количество AM в сети NAN
[0244] Первоначальное решение и новое решение приводят к различию в количестве AM в сети. Как показано на фиг. 6-g, фиг. 6-g является схемой сбора статистики по количеству AM в сети NAN в обычном способе выбора AM. Как показано на фиг. 6-h, фиг. 6-h является схемой сбора статистики по количеству AM в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения. На фиг. 6-g и фиг. 6-h, по горизонтальной оси отложен индекс окна обнаружения (DW Index), и по вертикальной оси отложено количество привязывающих мастеров (количество Anchor Master). В первоначальном решении, в сети на протяжении большей части времени не существует AM или существуют два AM; однако, в новом решении, в большинстве случаев в сети поддерживается только один AM. AM определяется как мастер с наибольшим MR и является эталоном синхронизации сети NAN. В общем случае, существует только один. Таким образом, результат нового решения лучше отвечает цели конструкции.
[0245] 2.3. HC устройства
[0246] HC устройства в сети NAN отдельно показан на фиг. 6-i и фиг. 6-j, когда применяются первоначальное решение и новое решение. Как показано на фиг. 6-i, фиг. 6-i являться схемой сбора статистики по HC в сети NAN в обычном способе выбора AM. Как показано на фиг. 6-j, фиг. 6-j являться схемой сбора статистики по HC в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения. На фиг. 6-i и фиг. 6-j, по горизонтальной оси отложен индекс окна обнаружения (DW Index), и по вертикальной оси отложен счетчик переходов (Hop Count). В новом решении, HC в сети всегда сравнительно мал, и наибольший HC не превышает 8; однако в первоначальном решении, в отсутствие более высокого MR, HC устройства постоянно увеличивается, и, в конце концов, наступает случай, когда HC=23. Поскольку кадр Sync Beacon, в котором HC превышает конкретный порог, отвергается, даже если построена очень малая сеть, превышение HC приводит к разрушению сети NAN.
[0247] Следует отметить, что, в первоначальном решении, HC внезапно уменьшается после увеличения до конкретного значения, и это изменение не вызвано появлением устройства с более высоким MR в сети NAN. Затем, тот факт, что HC не увеличивается, анализируется в дальнейшем, и причина, по которой HC не увеличивается, состоит в том, что значение откладывания передачи (единица: временной сегмент) отправки кадра Sync Beacon указывается следующим образом:

[0248] Таким образом, время откладывания передачи связано с HC. Более высокий HC указывает более высоко значение откладывания передачи и более позднюю отправку кадра Sync Beacon. Другому устройству также необходимо отправлять кадр обнаружение обслуживания, который занимает конкретное время, но DW имеет только 16 TU. Таким образом, когда HC увеличивается до конкретной степени, backoffer_timer слишком велик, из-за чего кадр Sync Beacon не отправляется в течение DW во времени. Таким образом, после ожидания на протяжении 16 DW, устройства NAN сами устанавливаются на AM последовательно, и HC снова устанавливаются равными 0. Фактически, в этом случае, первоначальная сеть разрушается, и кластер NAN повторно устанавливается между устройствами. Таким образом, существует причина, по которой AMR, записанный в устройстве, внезапно реагирует на изменение наибольшего MR один раз спустя относительно долгое время в первоначальном решении на фиг. 6-c.
[0249] 2.4. Синхронизация TSF
[0250] Как показано на фиг. 6-k, фиг. 6-k является схемой сбора статистики по изменению TSF в сети NAN в обычном способе выбора AM. Как показано на фиг. 6-l, фиг. 6-l является схемой сбора статистики по изменению TSF в сети NAN в способе выбора AM согласно варианту осуществления настоящего изобретения. На фиг. 6-k и фиг. 6-l, по горизонтальной оси отложено время t, измеряемое в мкс (μs), и по вертикальной оси отложен дрейф функции синхронизации по времени (Time Synchronization Function Drift), измеряемый в мкс (μs). В первоначальном решении, поскольку реальный AM утрачивается, каждое устройство действует самостоятельно, и, с течением времени, между TSF устройств возникает заметное различие; однако, в новом решении, поскольку все устройства могут обновлять информацию AM во времени и всегда поддерживают синхронизацию по времени с AM, различие между TSF устройств очень мало, что облегчает синхронизацию по времени между устройствами. Очевидно, способность нового решения к синхронизации TSF гораздо выше, чем у первоначального решения.
[0251] На основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0252] Следует отметить, что, для краткого описания, вышеописанные варианты осуществления способа представлены как несколько действий. Однако специалисту в данной области техники очевидно, что настоящее изобретение не ограничивается описанным порядком действий, поскольку, согласно настоящему изобретению, некоторые этапы могут выполняться в других порядках или одновременно. Кроме того, специалисту в данной области техники также следует понять, что все варианты осуществления, описанные в этом описании изобретения, относятся к иллюстративным вариантам осуществления, и предусмотренные действия и модули не всегда являются обязательными для настоящего изобретения.
[0253] Чтобы лучше реализовать вышеописанные решения в этом варианте осуществления настоящего изобретения, в дальнейшем предусмотрено соответствующее устройство, выполненное с возможностью реализации вышеописанных решений.
[0254] Согласно фиг. 7-a, устройство 700 для выбора привязывающего мастера, предусмотренное согласно варианту осуществления настоящего изобретения, может включать в себя: модуль 701 приема кадра маяка, модуль 702 переключения ролей и модуль 703 обновления информации.
[0255] Модуль 701 приема кадра маяка выполнен с возможностью приема кадра NAN Beacon маяка сетевого соединения на основе сведений о соседях, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени TSF, и первая информация AM включает в себя: первый ранг привязывающего мастера AMR, первый счетчик переходов HC и первое время передачи маяка привязывающего мастера AMBTT.
[0256] Модуль 702 переключения ролей выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и ранг мастера MR устройства больше, чем первый AMR, переключения роли устройства на AM, причем устройство записывает вторую информацию AM, и вторая информация AM включает в себя: второй AMR, второй HC и второе AMBTT.
[0257] Модуль 703 обновления информации выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0258] В некоторых вариантах осуществления настоящего изобретения, модуль 702 переключения ролей дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, переключения роли устройства на AM; или
модуль 703 обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0259] Согласно фиг. 7-b, в некоторых вариантах осуществления настоящего изобретения, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
модуль 704 инициирования выполнения, выполненный с возможностью: если первый HC меньше или равен порогу счетчика переходов, инициирования модуля 702 переключения ролей для выполнения этапа переключения роли устройства на AM, или инициирования модуля 703 обновления информации для выполнения этапа обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0260] Как показано на фиг. 7-b, в некоторых других вариантах осуществления настоящего изобретения, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
модуль 705 отвержения кадра маяка, выполненный с возможностью: если первый HC больше, чем заранее заданный порог счетчика переходов, отвержения кадра NAN Beacon.
[0261] Согласно фиг. 7-c, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, когда устройство 700 является AM, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
первый модуль 706 определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет первому условию, определения, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: первый AMR меньше, чем второй AMR, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0262] Согласно фиг. 7-d, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, когда устройство 700 является AM, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
второй модуль 707 определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, когда второй AMR в устройстве обновлен, если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет второму условию, определения, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: второй AMR меньше, чем второй AMR, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0263] Согласно фиг. 7-e, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, когда устройство 700 не является AM, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
третий модуль 708 определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
когда второй AMR в устройстве обновлен, если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR равен третьему AMR в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет третьему условию, определения, что кадр NAN Beacon используется для выбора AM, причем третье условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0264] Согласно фиг. 7-f, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, когда устройство 700 не является AM, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя:
четвертый модуль 709 определения выбора AM, выполненный с возможностью определения, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет четвертому условию, определения, что кадр NAN Beacon используется для выбора AM, причем четвертое условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0265] В некоторых вариантах осуществления настоящего изобретения, модуль 703 обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR больше, чем второй AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0266] Следует отметить, что согласно фиг. 7-g, в некоторых вариантах осуществления настоящего изобретения, модуль 703 обновления информации включает в себя:
первый подмодуль 7031 обновления AMR, выполненный с возможностью обновления второго значения AMR до первого значения AMR;
первый подмодуль 7032 обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1;
первый подмодуль 7033 обновления AMBTT, выполненный с возможностью: если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT; и
подмодуль 7034 обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF.
[0267] В некоторых других вариантах осуществления настоящего изобретения, модуль 703 обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первое AMBTT больше, чем второе AMBTT, обновления, согласно кадру NAN Beacon, второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве.
[0268] В частности, модуль 703 обновления информации может включать в себя:
первый подмодуль обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1;
первый подмодуль обновления AMBTT, выполненный с возможностью: если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT; и
подмодуль обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF.
[0269] В некоторых вариантах осуществления настоящего изобретения, модуль 703 обновления информации дополнительно выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и когда первое AMBTT равно второму AMBTT, и первый HC меньше, чем второй HC минус 1, обновления, согласно кадру NAN Beacon, второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве.
[0270] В частности, модуль 703 обновления информации может включать в себя:
первый подмодуль обновления HC, выполненный с возможностью обновления второго значения HC до первого значения HC плюс 1; и
подмодуль обновления TSF, выполненный с возможностью обновления значения второй информации TSF до значения первой информации TSF.
[0271] Согласно фиг. 7-h, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя, по меньшей мере, один из следующих модулей, и на фиг. 7-h показаны модуль 710 игнорирования кадра маяка, первый модуль 711 обновления и третий модуль 712 обновления, которые включены в устройство 700 для выбора привязывающего мастера.
[0272] Модуль 710 игнорирования кадра маяка выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второму HC, игнорирования первой информации AM, переносимой в кадре NAN Beacon.
[0273] Первый модуль 711 обновления выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon не отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и первое AMBTT больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT, и обновления значения второй информации TSF до значения первой информации TSF.
[0274] Третий модуль 712 обновления выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT, обновления значения второй информации TSF до значения первой информации TSF, и обновления второго значения HC до первого значения HC плюс 1.
[0275] Согласно фиг. 7-i, в некоторых вариантах осуществления настоящего изобретения, по сравнению с устройством 700 для выбора привязывающего мастера, показанным на фиг. 7-a, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя, по меньшей мере, один из следующих модулей, и на фиг. 7-i показаны модуль 710 игнорирования кадра маяка, второй модуль 713 обновления и третий модуль 712 обновления, которые включены в устройство 700 для выбора привязывающего мастера.
[0276] Модуль 710 игнорирования кадра маяка выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второму HC, игнорирования первой информации AM, переносимой в кадре NAN Beacon.
[0277] Второй модуль 713 обновления выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, и кадр NAN Beacon отправлен AM, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и значение заранее заданного/ых байта/байтов первой информации TSF больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT, и обновления значения второй информации TSF до значения первой информации TSF.
[0278] Третий модуль 712 обновления выполнен с возможностью: если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, обновления второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT, обновления значения второй информации TSF до значения первой информации TSF, и обновления второго значения HC до первого значения HC плюс 1.
[0279] В некоторых вариантах осуществления настоящего изобретения, модуль 702 переключения ролей дополнительно выполнен с возможностью: когда разность, полученная вычитанием второго AMBTT из значения второй информации TSF больше, чем заранее заданный порог времени передачи, переключения роли устройства на AM.
[0280] В некоторых вариантах осуществления настоящего изобретения, когда устройство не является AM, и MR устройства обновлен, модуль 702 переключения ролей дополнительно выполнен с возможностью: когда обновленный MR больше, чем второй AMR, переключения роли устройства на AM.
[0281] Следует отметить, что, согласно фиг. 7-j, в некоторых вариантах осуществления настоящего изобретения, модуль 702 переключения ролей включает в себя:
второй подмодуль 7021 обновления AMR, выполненный с возможностью обновления второго значения AMR до значения MR устройства;
второй подмодуль 7022 обновления HC, выполненный с возможностью обновления второго значение HC до 0; и
второй подмодуль 7023 обновления AMBTT, выполненный с возможностью обновления второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов второй информации TSF.
[0282] В некоторых вариантах осуществления настоящего изобретения, устройство 700 для выбора привязывающего мастера может дополнительно включать в себя: модуль поддержания роли, выполненный с возможностью: когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до обновленного значения MR устройства.
[0283] Следует отметить, что обмен содержанием, например информацией, между модулями/блоками вышеописанного устройства, и процессы его выполнения опирается на тот же принцип, что и варианты осуществления способа настоящего изобретения, и приводит к тем же техническим результатам, что и варианты осуществления способа настоящего изобретения. За конкретным содержанием, обратимся к описаниям в вышеописанном варианте осуществления способа, и детали здесь повторно не описаны.
[0284] В заключение, на основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как модуль приема кадра маяка принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, модуль переключения ролей переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, модуль обновления информации обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0285] Этот вариант осуществления настоящего изобретения дополнительно предусматривает компьютерный носитель данных, причем на компьютерном носителе данных хранится программа, и программа выполняет часть или все этапы, записанные в вышеописанных вариантах осуществления способа.
[0286] В дальнейшем рассмотрено другое устройство для выбора привязывающего мастера, предусмотренное в этом варианте осуществления настоящего изобретения. Согласно фиг. 8, устройство 800 для выбора привязывающего мастера включает в себя: по меньшей мере, один приемник 801, по меньшей мере, один процессор 802, по меньшей мере, одну память 803, и, по меньшей мере, одну шину 804 связи, причем, по меньшей мере, одна шина 804 связи используется для реализации соединения и взаимной связи между этими компонентами. (Количество процессоров 802 в устройстве 800 для выбора привязывающего мастера может быть один или более, и на фиг. 8, в порядке примера, используется один процессор). В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один приемник 801, по меньшей мере, один процессор 802 и память 803 могут быть соединены с использованием шины связи другого средства. На фиг. 8 приведен пример, в котором соединение реализуется с использованием шины связи.
[0287] Шина 804 связи может представлять собой шину стандартной промышленной архитектуры (Industry Standard Architecture, сокращенно ISA), шину взаимодействия периферийных компонентов (Peripheral Component Interconnect, сокращенно PCI), или шину расширенной стандартной промышленной архитектуры (Extended Industry Standard Architecture, сокращенно EISA) и т.п. Шина 804 может относиться к категории шины адресов, шины данных, шины управления и пр. Для простоты обозначения, шина представлена на фиг. 8 с использованием только одной толстой линии; однако это не указывает, что существует только одна шина или только один тип шины.
[0288] Память 803 выполнена с возможностью хранения исполнимого программного кода, причем программный код включает в себя рабочую инструкцию компьютера. Память 803 может включать в себя a быстродействующую память RAM и может дополнительно включать в себя энергонезависимую память (non-volatile memory), например, по меньшей мере, одну память на основе магнитного диска.
[0289] Процессор 802 может представлять собой центральный процессор (Central Processing Unit, сокращенно CPU), специализированную интегральную схему (Application Specific Integrated Circuit, сокращенно ASIC) или одну или более интегральных схем, выполненных с возможностью реализации этого варианта осуществления настоящего изобретения.
[0290] Процессор 802 выполнен с возможностью выполнения исполнимого программного кода, хранящегося в памяти 803, например, компьютерной программы, для выполнения программы, соответствующей исполнимому коду.
[0291] Приемник 801 выполнен с возможностью приема кадра NAN Beacon маяка сетевого соединения на основе сведений о соседях, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени TSF, и первая информация AM включает в себя: первый ранг привязывающего мастера AMR, первый счетчик переходов HC и первое время передачи маяка привязывающего мастера AMBTT.
[0292] При выполнении исполнимого программного кода, хранящегося в памяти 803, процессор 802 может, в частности, выполнять следующие этапы:
после приема кадра NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и ранг мастера MR устройства больше, чем первый AMR, переключения роли устройства на AM, причем вторая информация AM записана в устройстве, и вторая информация AM включает в себя: второй AMR, второй HC и второе AMBTT; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, обновление, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0293] В некоторых вариантах осуществления настоящего изобретения, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов:
если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства равен первому AMR, переключения роли устройства на AM, или обновление, устройством, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0294] В некоторых вариантах осуществления настоящего изобретения, до того, как процессор 802 переключает роль устройства на AM, или до обновления, устройством, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов:
если первый HC меньше или равен порогу счетчика переходов, инициирования выполнения этапа переключения роли устройства на AM, или инициирования выполнения этапа обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0295] В некоторых вариантах осуществления настоящего изобретения, когда устройство является AM, процессор 802 определяет, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первый AMR равен третьему AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет первому условию, определения, что кадр NAN Beacon используется для выбора AM, причем первое условие состоит в следующем: первый AMR меньше, чем второй AMR, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0296] Когда устройство является AM, в некоторых вариантах осуществления настоящего изобретения, процессор 802 может определять, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR больше или равен второму AMR, и если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет второму условию, определения, что кадр NAN Beacon используется для выбора AM, причем второе условие состоит в следующем: первый AMR меньше, чем второй AMR, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0297] Когда устройство не является AM, в некоторых вариантах осуществления настоящего изобретения, процессор 802 может определять, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первый AMR равен третьему AMR в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM, причем третий AMR является AMR до обновления второго AMR в устройстве; и
если кадр NAN Beacon не удовлетворяет третьему условию, определения, что кадр NAN Beacon используется для выбора AM, причем третье условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первый AMR равен третьему AMR в течение заранее заданного периода времени.
[0298] Когда устройство не является AM, в некоторых вариантах осуществления настоящего изобретения, процессор 802 может определять, следующим образом, используется ли кадр NAN Beacon для выбора AM:
если первый AMR меньше, чем второй AMR в течение заранее заданного периода времени после начала обновления второго AMR, определения, что кадр NAN Beacon не используется для выбора AM;
если первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени, определения, что кадр NAN Beacon не используется для выбора AM; и
если кадр NAN Beacon не удовлетворяет четвертому условию, определения, что кадр NAN Beacon используется для выбора AM, причем четвертое условие состоит в следующем: первый AMR меньше, чем второй AMR в течение заранее заданного периода времени, или первое AMBTT меньше, чем второе AMBTT в течение заранее заданного периода времени.
[0299] В некоторых вариантах осуществления настоящего изобретения, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов: если кадр NAN Beacon используется для выбора AM, когда первый AMR больше, чем второй AMR, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0300] В некоторых вариантах осуществления настоящего изобретения, обновление, процессором 802, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве, в частности, включает в себя:
обновление второго значения AMR до первого значения AMR;
обновление второго значения HC до первого значения HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление второго значения AMBTT до значения заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновление второго значения AMBTT до первого AMBTT; и
обновление значения второй информации TSF до значения первой информации TSF.
[0301] В некоторых вариантах осуществления настоящего изобретения, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов:
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, если первое AMBTT больше, чем второе AMBTT, или первое AMBTT равно второму AMBTT и первый HC меньше, чем второй HC минус 1, обновления, согласно кадру NAN Beacon, второй информации AM и второй информации TSF, которые записаны в устройстве.
[0302] В некоторых вариантах осуществления настоящего изобретения, процессор 802 дополнительно выполнен с возможностью выполнения, по меньшей мере, одного из следующих этапов:
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC больше или равен второму HC, игнорирования первой информации AM, переносимой в кадре NAN Beacon;
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, первое значение AMBTT не равно 0, первый HC равен второму HC минус 1, и первое AMBTT больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT и обновления значения второй информации TSF до значения первой информации TSF;
если кадр NAN Beacon используется для выбора AM, и первое значение AMBTT равно 0, когда первый AMR равен второму AMR, первый HC равен второму HC минус 1, и значение заранее заданного/ых байта/байтов первой информации TSF больше, чем второе AMBTT, обновления второго значения AMBTT до первого AMBTT и обновления значения второй информации TSF до значения первой информации TSF; и
если кадр NAN Beacon используется для выбора AM, когда первый AMR равен второму AMR, и первый HC меньше, чем второй HC минус 1, если кадр NAN Beacon отправлен AM, обновление второго значения AMBTT до значения заранее заданного/ых байта/байтов первой информации TSF; или если кадр NAN Beacon не отправлен AM, обновления второго значения AMBTT до первого AMBTT, обновления значения второй информации TSF до значения первой информации TSF и обновления второго значения HC до первого значения HC плюс 1.
[0303] В некоторых вариантах осуществления настоящего изобретения, процессор 802 дополнительно выполнен с возможностью выполнения:
когда разность, полученная вычитанием второго AMBTT из значения второй информации TSF больше, чем заранее заданный порог времени передачи, переключения роли устройства на AM.
[0304] В некоторых вариантах осуществления настоящего изобретения, когда устройство не является AM, и MR устройства обновлен, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов:
когда обновленный MR устройства больше, чем второй AMR, переключения роли устройства на AM.
[0305] В некоторых вариантах осуществления настоящего изобретения, переключение, процессором 802, роли устройства на AM, в частности, включает в себя:
обновление второго значения AMR до первого значения AMR;
обновление второго значения HC до 0; и
обновление второго значения AMBTT до значения заранее заданного/ых байта/байтов второй информации TSF.
[0306] В некоторых вариантах осуществления настоящего изобретения, когда устройство является AM, процессор 802 дополнительно выполнен с возможностью выполнения следующих этапов:
когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до обновленного значения MR устройства.
[0307] На основании вышеприведенного описания этого варианта осуществления настоящего изобретения, можно понять, что после того, как устройство принимает кадр NAN Beacon, если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства больше, чем первый AMR, устройство переключает роль устройства на AM; или если кадр NAN Beacon используется для выбора AM, когда первый AMR, включенный в кадр NAN Beacon, меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство обновляет, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве. В случае, когда кадр NAN Beacon, принятый устройством, может использоваться для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, роль устройства переключается на AM, и устройство, роль которого переключается на AM, может перезаписывать первоначальный AM в кластере NAN, и, таким образом, первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, быстро выбирается новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN, и гарантирует возможность реализовать синхронизацию по времени между устройствами. Когда значения MR устройства недостаточно, чтобы сделать устройство AM, то есть, когда первый AMR меньше, чем второй AMR, записанный в устройстве, и MR устройства меньше, чем первый AMR, устройство может обновлять, согласно кадру NAN Beacon, вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, и, таким образом, второй AMR, записанный в устройстве, также обновляется, и первоначальный AMR в кластере NAN также перезаписывается; даже если MR AM уменьшается, можно быстро выбрать новый AM. Таким образом, в кластере NAN всегда существует AM, и каждое устройство может записывать верную информацию AM, что позволяет избежать разрушения всего кластера NAN и гарантирует возможность реализовать синхронизацию по времени между устройствами.
[0308] Кроме того, следует отметить, что описанный вариант осуществления устройства является лишь иллюстративным. Блоки, описанные как отдельные части, могут быть или не быть физически отдельными, и части, изображенные как блоки, могут быть или не быть физическими блоками, могут располагаться в одной позиции, или могут распределяться по нескольким сетевым блокам. Некоторые или все из модулей можно выбирать согласно фактическим потребностям для достижения целей решений вариантов осуществления. Кроме того, в прилагаемых чертежах вариантов осуществления устройства, предусмотренных настоящим изобретением, отношения соединения между модулями указывают, что модули имеют соединения с возможностью связи друг с другом, которые, в частности, могут быть реализованы в виде одной или более шин связи или кабелей сигнала. Специалист в данной области техники может понять и реализовать варианты осуществления настоящего изобретения без применения творческих способностей.
[0309] На основании описания вышеописанных вариантов реализации, специалист в данной области техники может отчетливо понять, что настоящее изобретение можно реализовать в программном обеспечении помимо необходимого универсального оборудования, или посредством специализированного оборудования, включающего в себя специализированную интегральную схему, специализированный CPU, специализированную память,
специализированный компонент и пр. В целом, любые функции, которые могут осуществляться компьютерной программой, легко реализовать с использованием соответствующего оборудования. Кроме того, конкретная аппаратная конструкция, используемая для достижения той же функции, может принимать различные формы, например, форму аналоговой цепи, цифровой цепи, специализированной цепи и т.п. Однако, что касается настоящего изобретения, программная реализация программы в большинстве случаев является предпочтительным вариантом реализации. Исходя из этого, технические решения настоящего изобретения по существу или часть, вносящая вклад в уровень техники, можно реализовать в форме программного продукта. Программный продукт хранится на считываемом носителе данных, например, флоппи-диске, флэш-носителе с интерфейсом USB, сменном жестком диске, в постоянной памяти (ROM, Read-Only Memory), оперативной памяти (RAM, Random Access Memory), на магнитном диске или оптическом диске компьютера, и включает в себя несколько инструкций, предписывающих компьютерному устройству (который может представлять собой персональный компьютер, сервер, сетевое устройство и пр.) осуществлять способы, описанные согласно вариантам осуществления настоящего изобретения.
[0310] Вышеупомянутые варианты осуществления предназначены лишь для описания технических решений настоящего изобретения, но не для ограничения настоящего изобретения. Хотя настоящее изобретение подробно описано согласно вышеупомянутым вариантам осуществления, специалисту в данной области техники следует понимать, что возможны модификации технических решений, описанных согласно вышеупомянутым вариантам осуществления, или эквивалентные замены некоторых их технических особенностей, не выходящие за рамки объема технических решений вариантов осуществления настоящего изобретения.
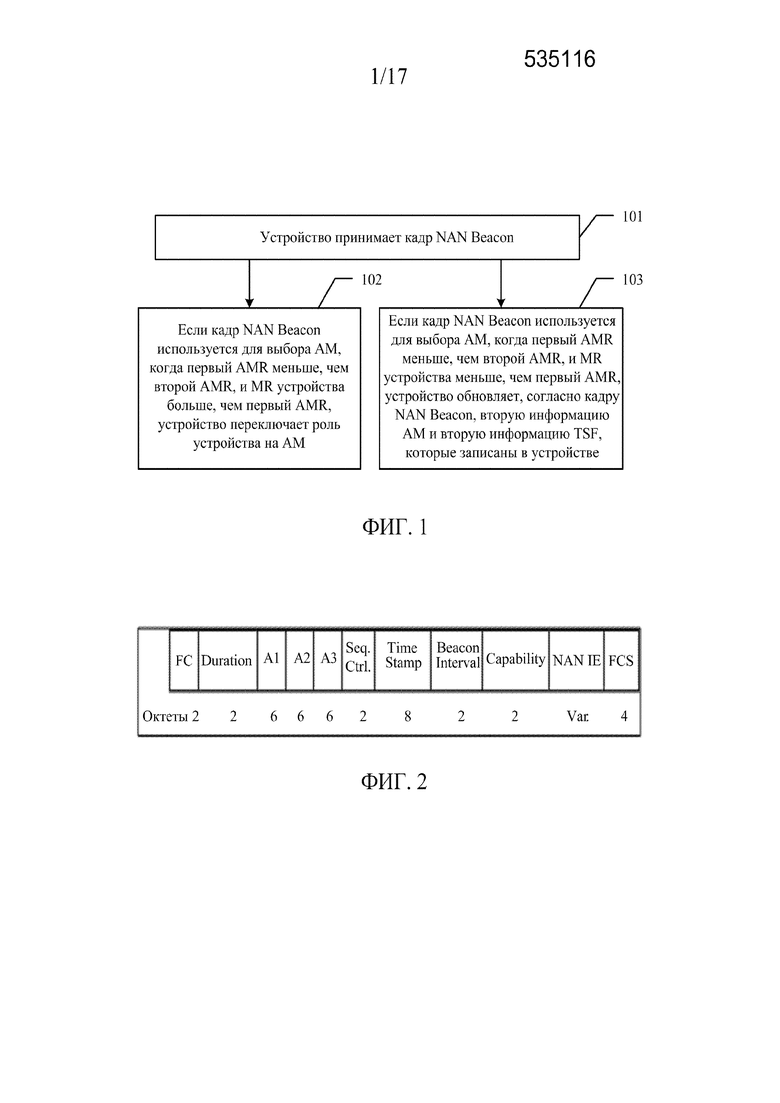
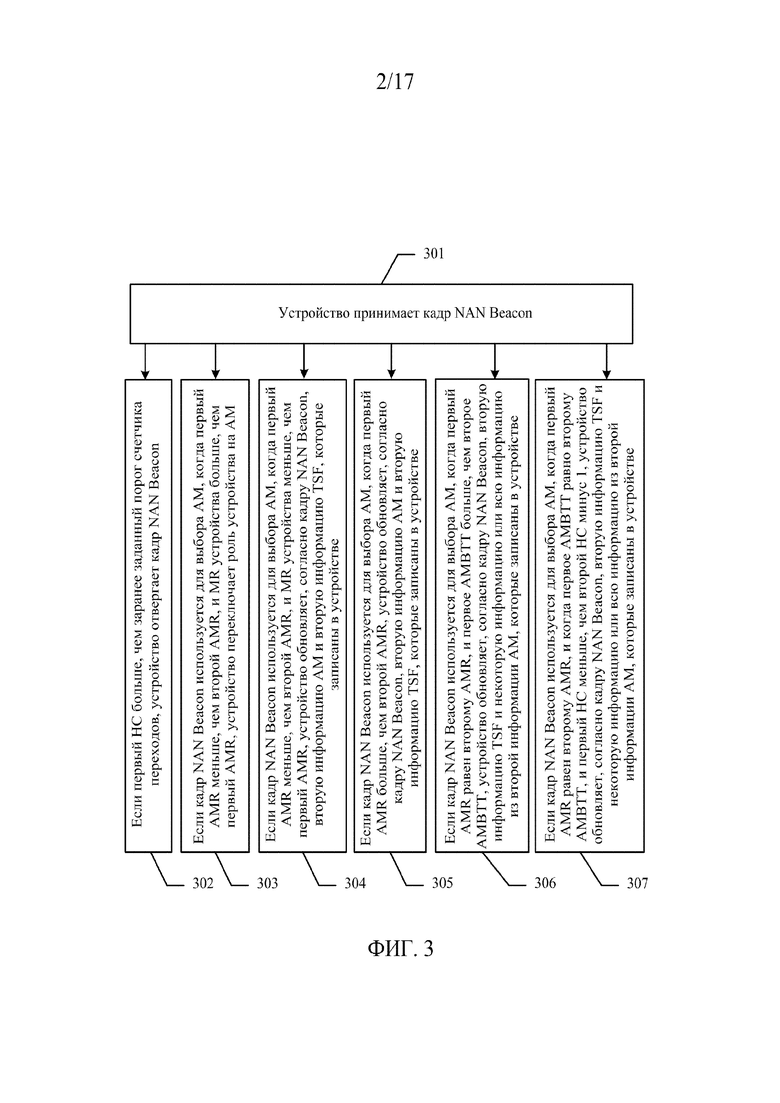
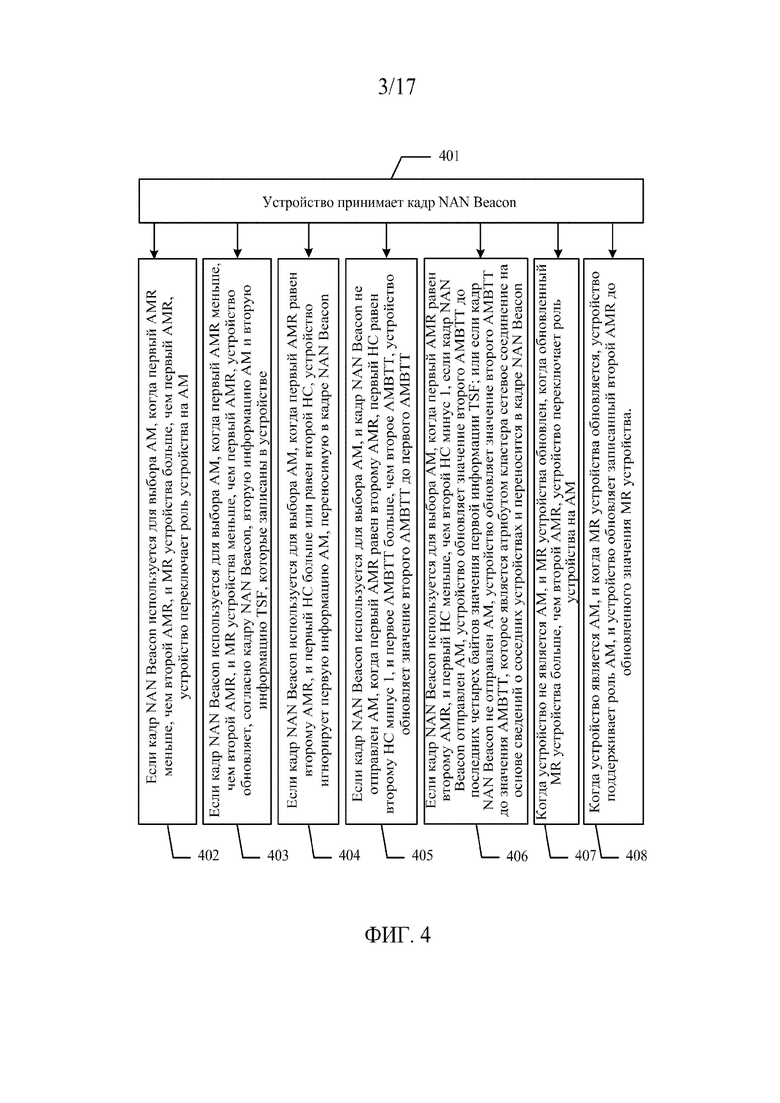
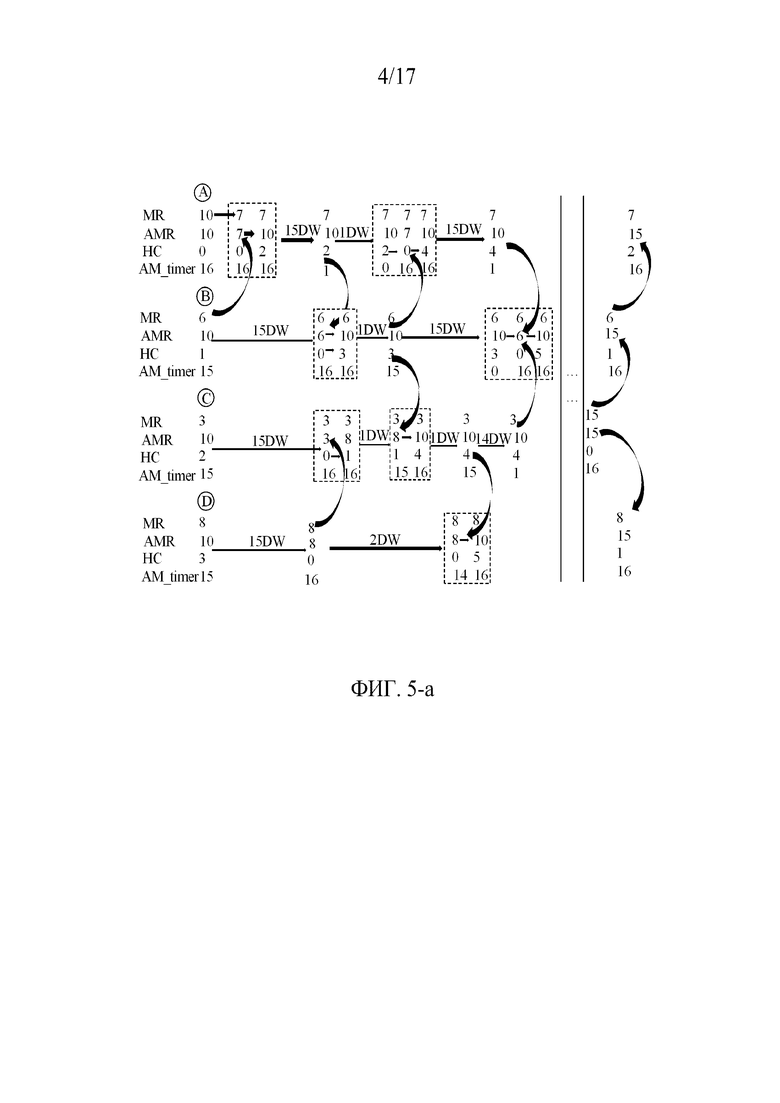
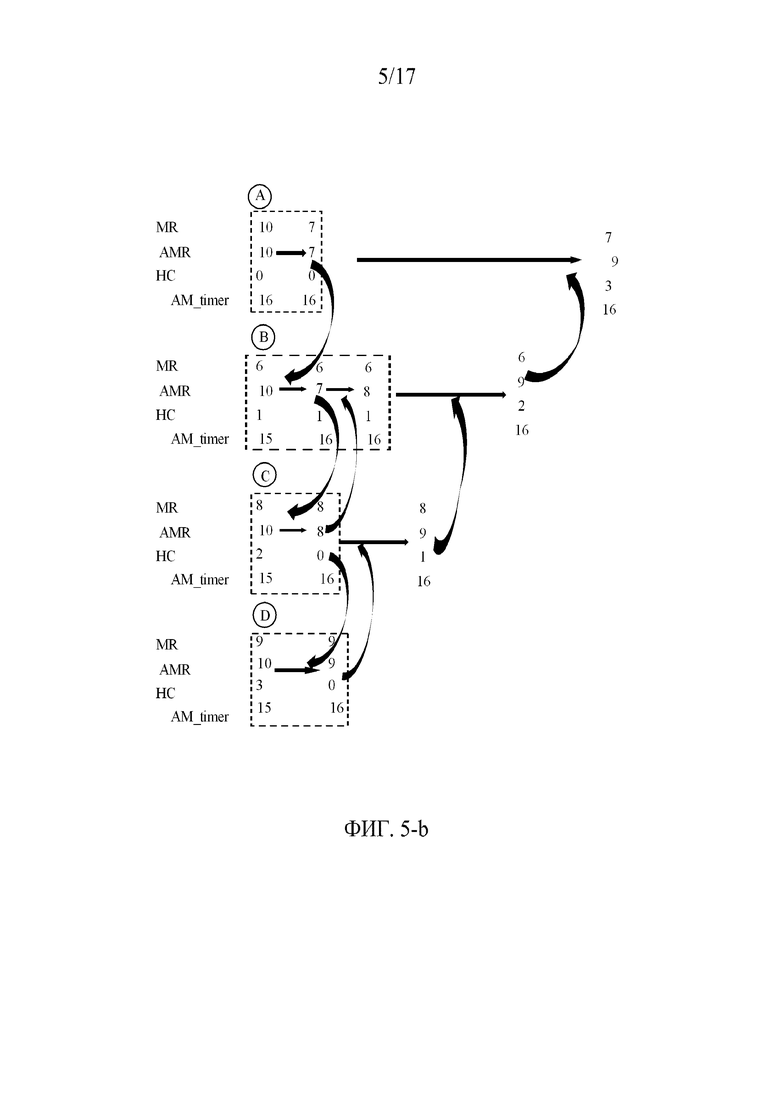
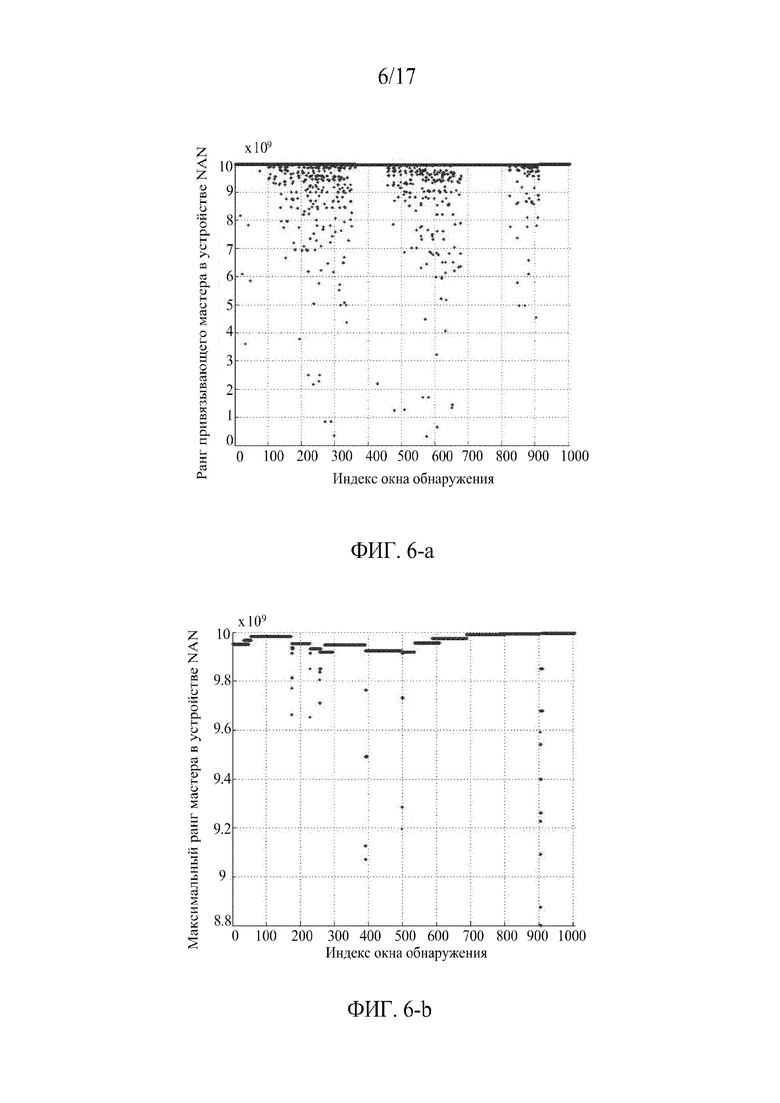
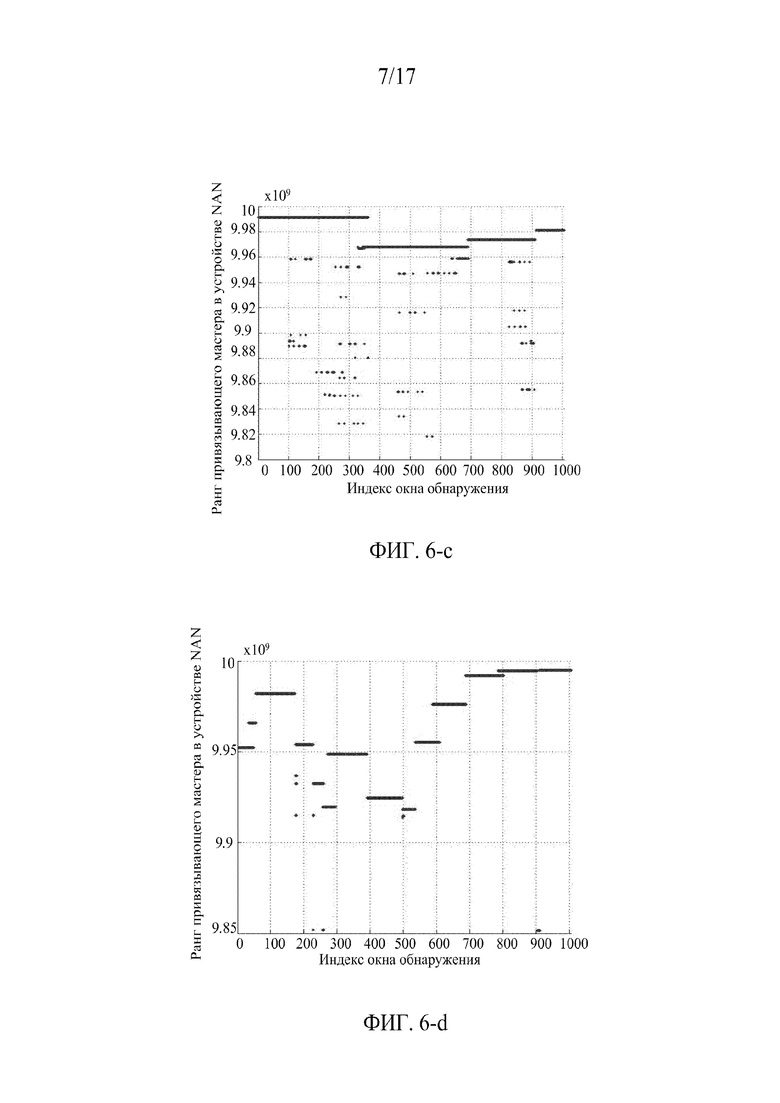
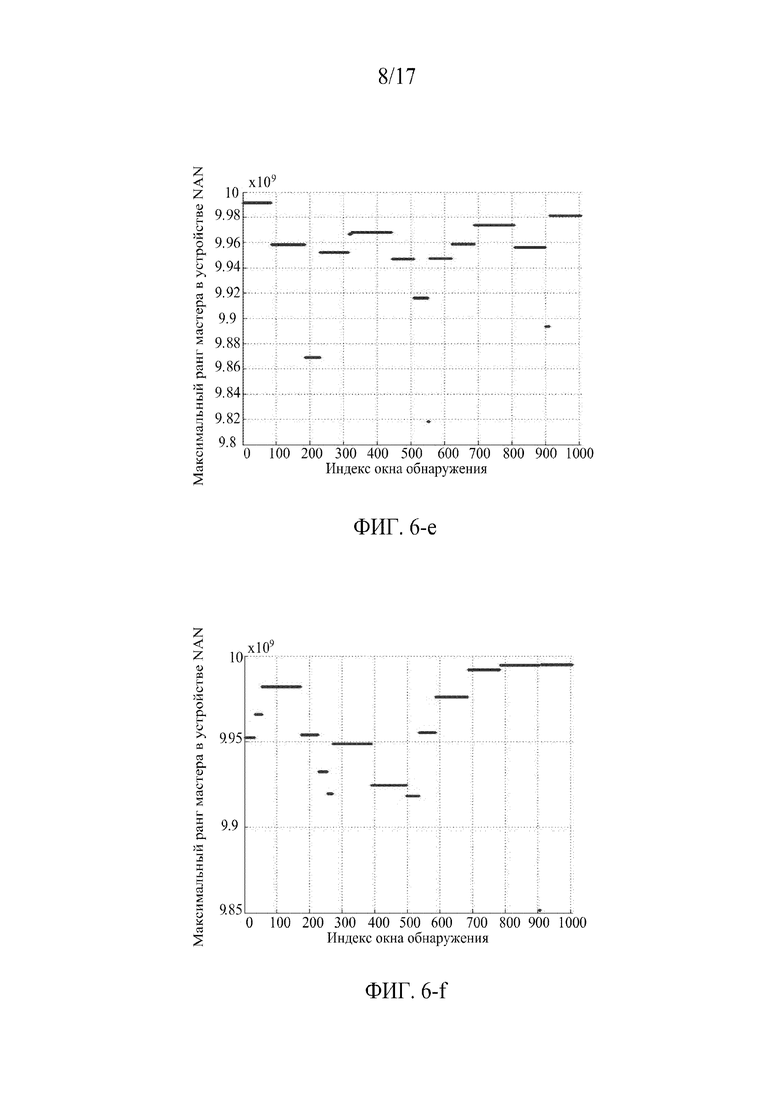
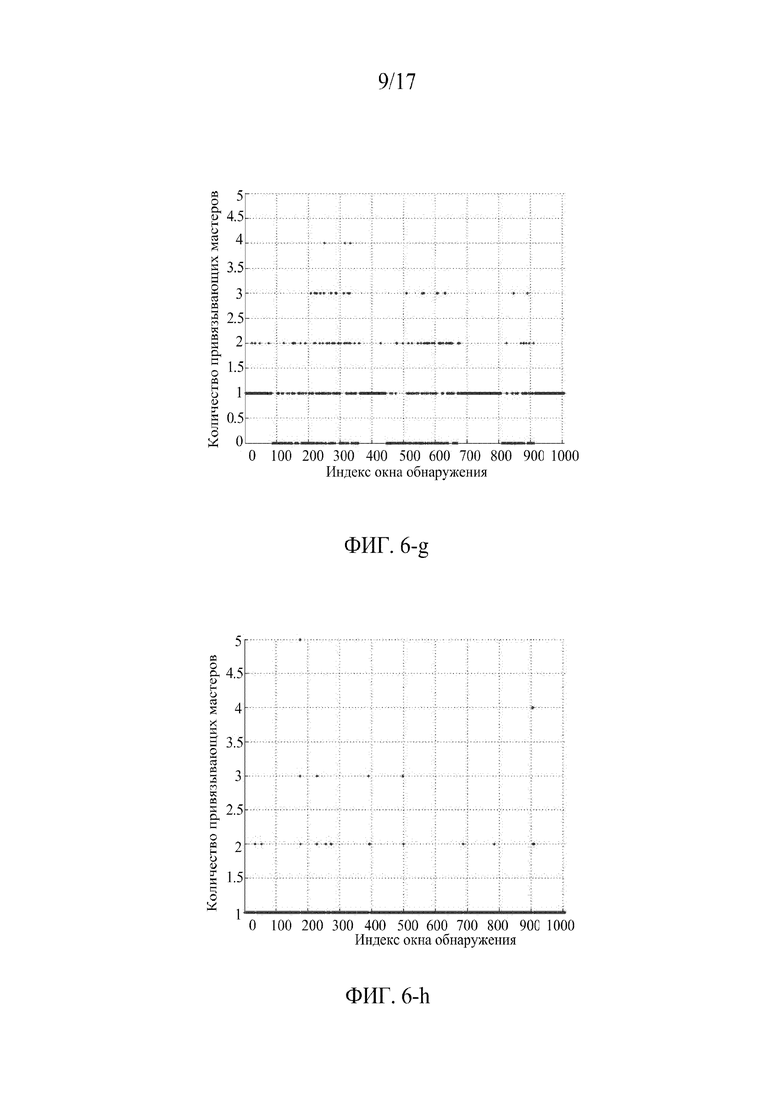
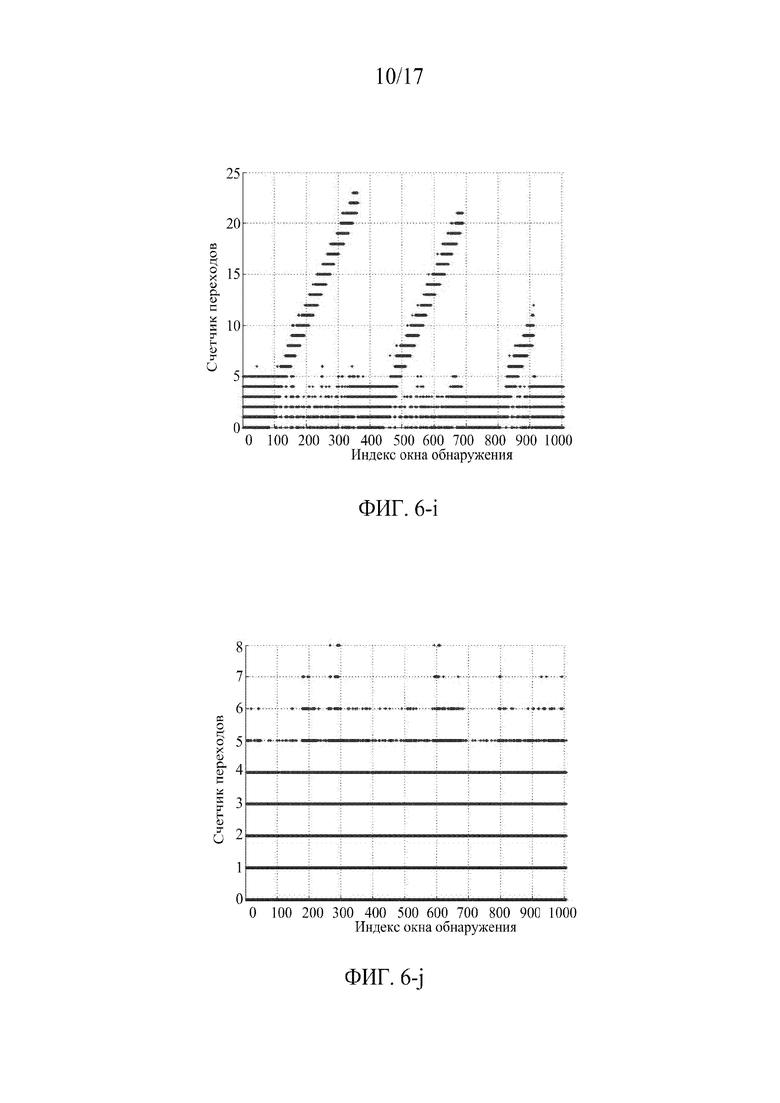
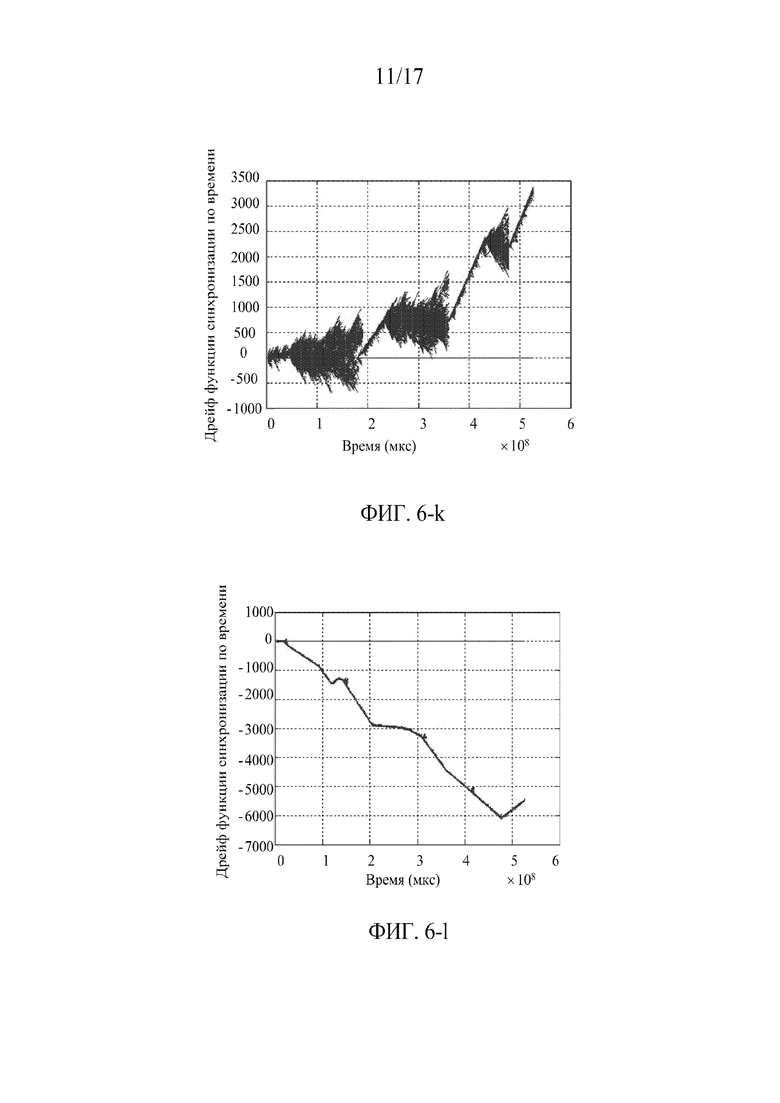
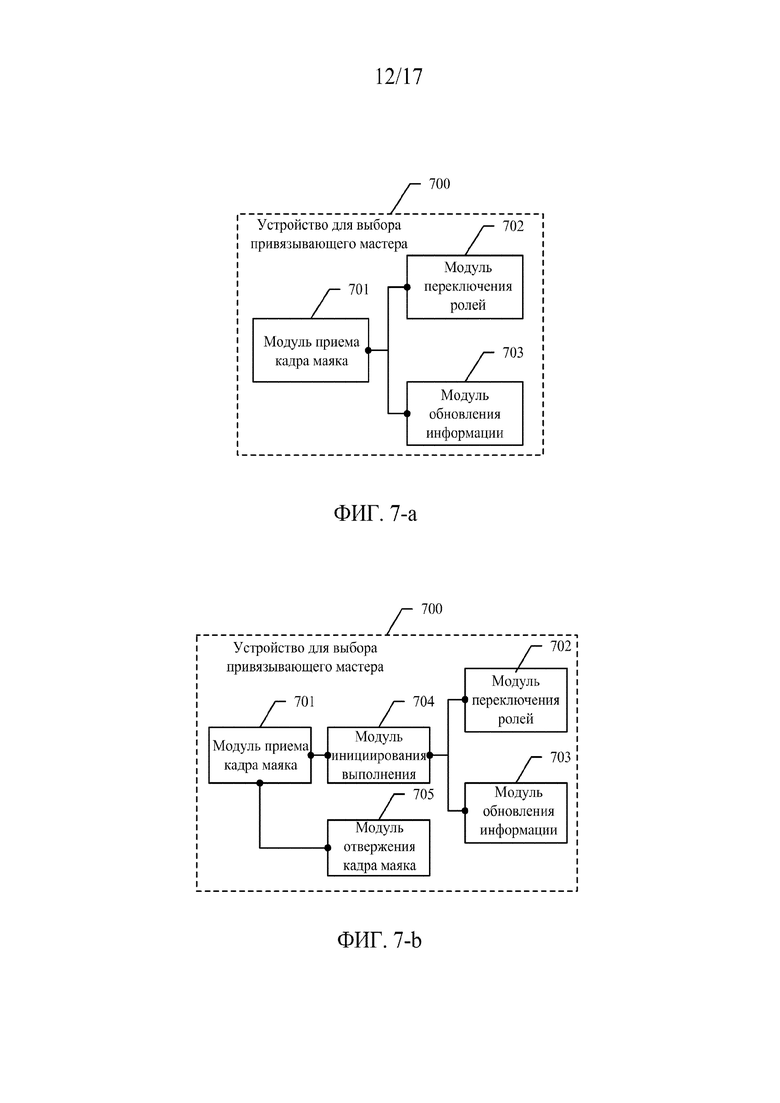
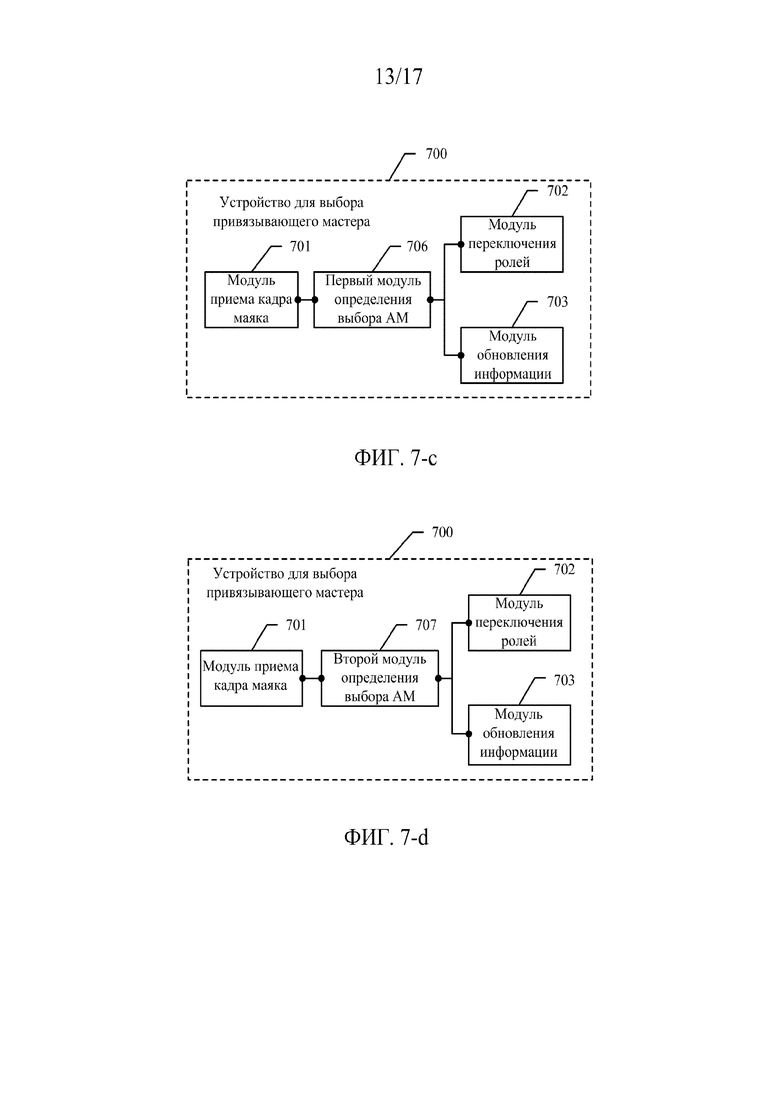
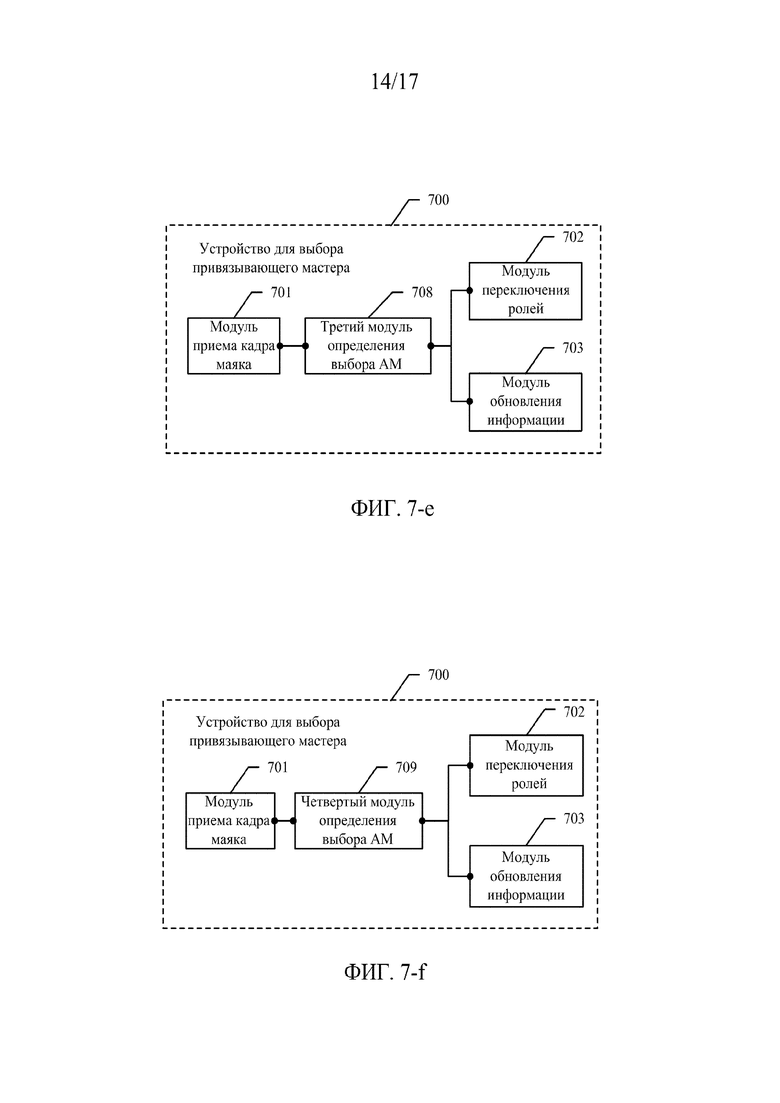
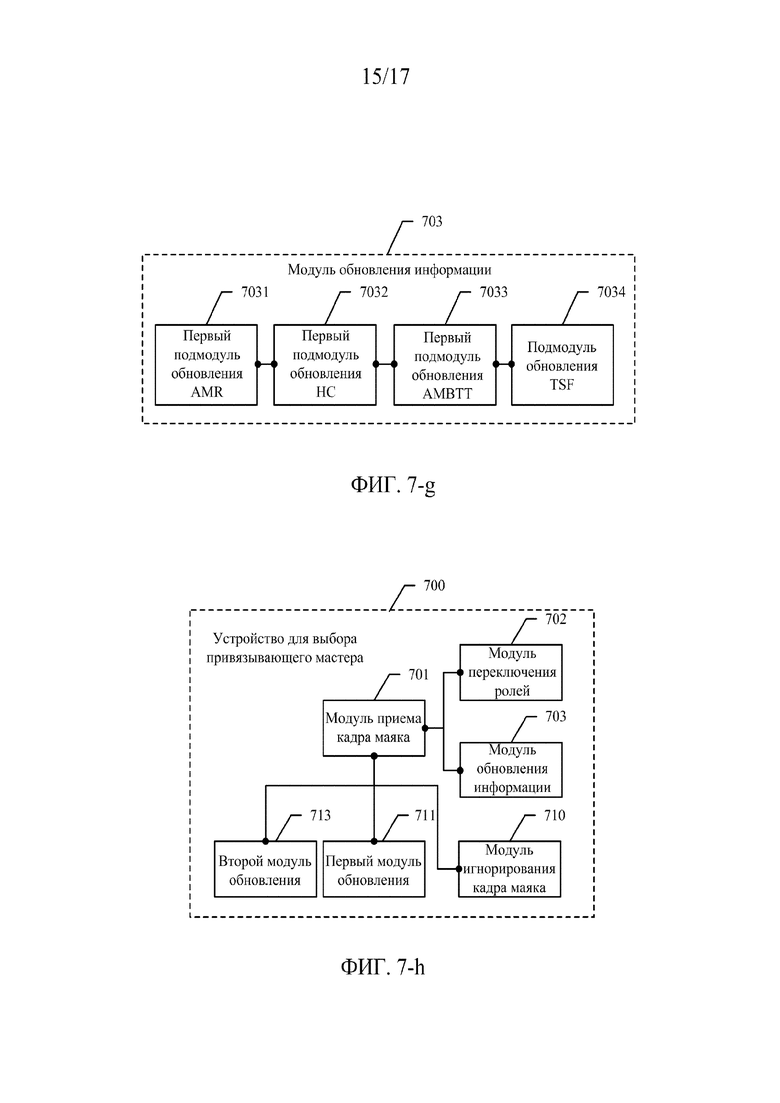
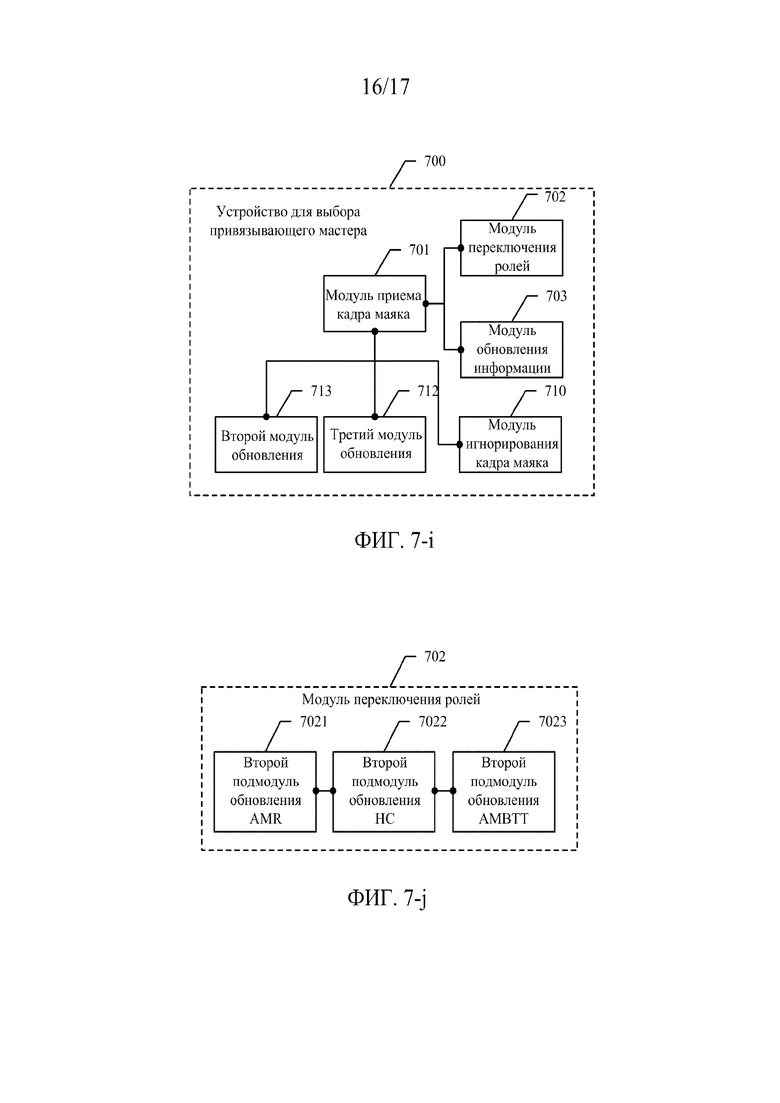
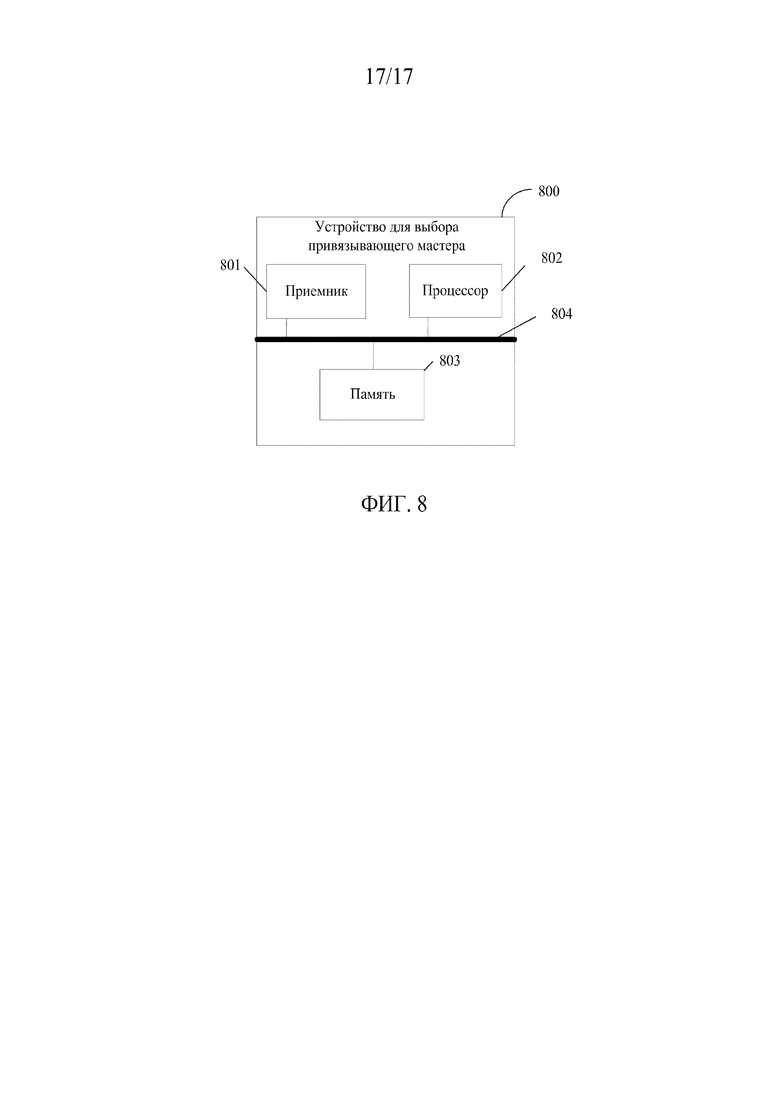
Изобретение относится к области связи. Техническим результатом является возможность реализации синхронизации во времени между устройствами. В вариантах осуществления настоящего изобретения раскрыты способ и устройство для выбора привязывающего мастера, который может поддерживать синхронизацию по времени между устройствами в кластере NAN. Способ включает в себя: прием устройством кадра NAN Beacon, причем кадр NAN Beacon несет первую информацию AM и первую информацию TSF, и первая информация AM включает в себя: первый AMR, первый HC и первое AMBTT; если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства больше, чем первый AMR, переключение устройством роли устройства на AM, причем вторая информация AM, записанная в устройстве, включает в себя: второй AMR, второй HC и второе AMBTT; и если кадр NAN Beacon используется для выбора AM, когда первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR, обновление устройством согласно кадру NAN Beacon второй информации AM и второй информации TSF, которые записаны в устройстве. 3 н. и 20 з.п. ф-лы, 29 ил.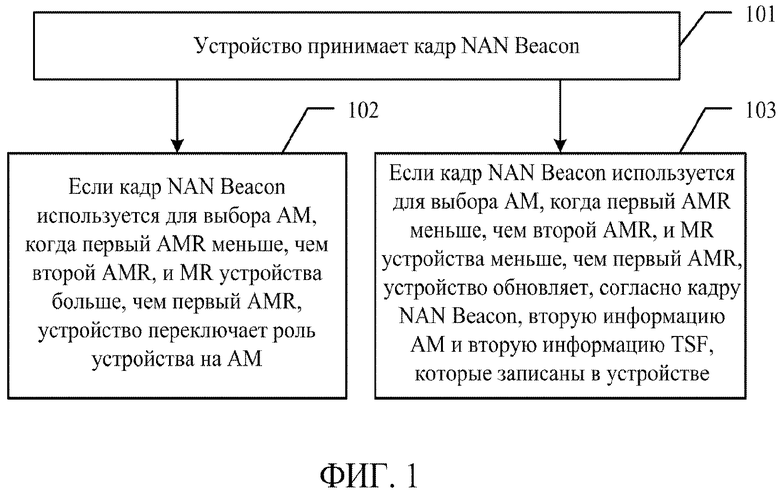
1. Способ выбора привязывающего мастера AM, причем способ содержит этапы, на которых:
принимают устройством кадр, NAN Beacon, маяка сетевого соединения на основе сведений о соседях, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени, TSF, и первая информация AM содержит: первый ранг привязывающего мастера, AMR, первый счетчик переходов, HC, и первое время передачи маяка привязывающего мастера AMBTT; и вторая информация AM и вторая информация TSF записаны в устройстве, причем вторая информация AM содержит: второй AMR, второй HC и второе AMBTT;
переключают устройством роль устройства на AM, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, и ранг мастера, MR, устройства больше, чем первый AMR; и
обновляют устройством вторую информацию AM и вторую информацию TSF, которые записаны в устройстве, согласно кадру NAN Beacon, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR.
2. Способ по п. 1, в котором переключение осуществляется, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, MR устройства больше, чем первый AMR, и роль устройства не установлена на AM; и
обновление осуществляется, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, MR устройства меньше, чем первый AMR, и роль устройства не установлена на AM.
3. Способ по п. 1, в котором обновление содержит этапы, на которых:
обновляют устройством второе значение AMR до равного первому значению AMR;
обновляют устройством второе значение HC до равного первому значению HC плюс 1;
если кадр NAN Beacon отправлен AM, обновляют устройством второе значение AMBTT до равного значению заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon отправлен не AM, обновляют устройством второе значение AMBTT до равного значению первого AMBTT; и
обновляют устройством значение второй информации TSF до равного значению первой информации TSF.
4. Способ по любому одному из пп. 1 - 3, причем способ дополнительно содержит этап, на котором:
обновляют устройством вторую информацию TSF и некоторую информацию или всю информацию из второй информации AM, которые записаны в устройстве, согласно кадру NAN Beacon, когда кадр NAN Beacon используется для выбора AM, первый AMR равен второму AMR, и первое AMBTT больше, чем второе AMBTT.
5. Способ по любому одному из пп. 1 - 3, в котором переключение устройством роли устройства на AM содержит этапы, на которых:
обновляют устройством второе значение AMR до равного значению MR устройства;
обновляют устройством второе значение HC до равного 0; и
обновляют устройством второе значение AMBTT до равного 0x00000000.
6. Способ по п. 4, в котором переключение устройством роли устройства на AM содержит этапы, на которых:
обновляют устройством второе значение AMR до равного значению MR устройства;
обновляют устройством второе значение HC до равного 0; и
обновляют устройством второе значение AMBTT до равного 0x00000000.
7. Способ по любому одному из пп. 1 - 3, в котором, когда устройство является AM, способ дополнительно содержит этапы, на которых:
когда MR устройства обновлен, поддерживают устройством роль AM и обновляют устройством записанный второй AMR до равного обновленному значению MR устройства.
8. Способ по п. 4 в котором, когда устройство является AM, способ дополнительно содержит этапы, на которых:
когда MR устройства обновлен, поддерживают устройством роль AM и обновляют устройством записанный второй AMR до равного обновленному значению MR устройства.
9. Способ по п. 5, в котором, когда устройство является AM, способ дополнительно содержит этапы, на которых:
когда MR устройства обновлен, поддерживают устройством роль AM, и обновляют устройством записанный второй AMR до равного обновленному значению MR устройства.
10. Способ по п. 6, в котором, когда устройство является AM, способ дополнительно содержит этапы, на которых:
когда MR устройства обновлен, поддерживают устройством роль AM и обновляют устройством записанный второй AMR до равного обновленному значению MR устройства.
11. Способ по любому одному из пп. 1 - 3, в котором кадр NAN Beacon представляет собой кадр маяка синхронизации.
12. Устройство для выбора привязывающего мастера AM, причем устройство содержит:
память, где хранятся инструкции;
приемник, выполненный с возможностью приема кадра маяка сетевого соединения на основе сведений о соседях, NAN Beacon, причем кадр NAN Beacon несет первую информацию AM и первую информацию функции синхронизации по времени, TSF, и первая информация AM включает в себя: первый ранг привязывающего мастера, AMR, первый счетчик переходов, HC, и первое время передачи маяка привязывающего мастера AMBTT; и вторая информация AM, и вторая информация TSF записаны в устройстве, причем вторая информация AM содержит: второй AMR, второй HC и второе AMBTT;
процессор, выполненный с возможностью исполнения инструкций для осуществления операций:
переключения роли устройства на AM, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, и ранг мастера, MR, устройства больше, чем первый AMR; и
обновления второй информации AM и второй информации TSF, которые записаны в устройстве, согласно кадру NAN Beacon, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, и MR устройства меньше, чем первый AMR.
13. Устройство по п. 12, в котором операция переключения осуществляется, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, MR устройства больше, чем первый AMR, и роль устройства не установлена на AM; и
операция обновления осуществляется, когда кадр NAN Beacon используется для выбора AM, первый AMR меньше, чем второй AMR, MR устройства меньше, чем первый AMR и роль устройства не установлена на AM.
14. Устройство по п. 13, в котором операция обновления содержит:
обновление второго значения AMR до равного первому значению AMR;
обновление второго значения HC до равного первому значению HC плюс 1;
если кадр NAN Beacon отправлен AM, обновление второго значения AMBTT до равного значению заранее заданного байта/заранее заданных байтов первой информации TSF; или если кадр NAN Beacon отправлен не AM, обновление второго значения AMBTT до равного первому AMBTT; и
обновление значения второй информации TSF до значения первой информации TSF.
15. Устройство по любому одному из пп. 12-14, в котором процессор дополнительно выполнен с возможностью исполнения инструкций для осуществления операций:
обновления второй информации TSF и некоторой информации или всей информации из второй информации AM, которые записаны в устройстве, согласно кадру NAN Beacon, когда кадр NAN Beacon используется для выбора AM, первый AMR равен второму AMR и первое AMBTT больше, чем второе AMBTT.
16. Устройство по любому одному из пп. 12-14, в котором операция переключения содержит:
обновление второго значения AMR до равного значению MR устройства;
обновление второго значения HC до равного 0; и
обновление второго значения AMBTT до равного 0x00000000.
17. Устройство по п. 15, в котором операция переключения содержит:
обновление второго значения AMR до равного значению MR устройства;
обновление второго значения HC до равного 0; и
обновление второго значения AMBTT до равного 0x00000000.
18. Устройство по любому одному из пп. 12-14, в котором, когда устройство является AM, процессор дополнительно выполнен с возможностью исполнения инструкций для осуществления операций:
когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до равного обновленному значению MR устройства.
19. Устройство по п. 15, в котором, когда устройство является AM, процессор дополнительно выполнен с возможностью исполнения инструкций для осуществления операций:
когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до равного обновленному значению MR устройства.
20. Устройство по п. 16, в котором, когда устройство является AM, процессор дополнительно выполнен с возможностью исполнения инструкций для осуществления операций:
когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до равного обновленному значению MR устройства.
21. Устройство по п. 17, в котором, когда устройство является AM, процессор дополнительно выполнен с возможностью исполнения инструкций для осуществления операций:
когда MR устройства обновлен, поддержания роли AM и обновления записанного второго AMR до равного обновленному значению MR устройства.
22. Устройство по любому одному из пп. 12-14, в котором кадр NAN Beacon представляет собой кадр маяка синхронизации.
23. Компьютерный носитель данных, содержащий компьютерный программный код, который, при выполнении компьютерным блоком, предписывает компьютерному блоку осуществлять способ по любому одному из пп. 1 - 3.
| CN 104053227 A, 17.09.2014 | |||
| RU 2011139361 A, 10.04.2013 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 102946634 A1, 27.02.2013 | |||
| CN 103369550 A, 23.10.2013 | |||
| CN 103209461 A, 17.07.2013. | |||

