Область техники, к которой относится изобретение
Изобретение относится к средствам, обеспечивающим обучение стрельбе из имитаторов стрелкового оружия и гранатометов, а именно к средствам имитации и идентификации точек прицеливания лазерных излучателей имитаторов.
Уровень техники
Из уровня техники известна «Система захвата движения» (патент RU 121947 от 14.06.2012), которая предназначена для захвата движения интересующего технического средства с помощью инерциальных микромеханических (МЭМС) датчиков и технологии беспроводной сенсорной сети (на основе стандарта IEEE 802.15.4/ZigBee) и может быть рассмотрена для решения задачи идентификации точек прицеливания имитатора стрелкового оружия.
Система захвата движения включает одно мобильное измерительное устройство для определения и передачи данных с параметрами захватываемого движения, приемник сигналов, блок обработки, блок хранения и визуализации данных, модуль беспроводной сенсорной сети, инерциальный измерительный модуль. Инерциальный измерительный модуль состоит из трехосного датчика угловой скорости, трехосного датчика ускорения, трехосного датчика магнитного поля, датчика температуры и соединенного с ними каналами связи микроконтроллера, обрабатывающего поступающие с датчиков сигналы.
Особенностью данного способа захвата движения является обеспечение высокой точности измерений параметров движения (ориентация и положение) интересующего технического средства, а также возможность использования захвата движения вне специально оборудованного помещения.
Использование беспроводной сенсорной сети позволяет значительно увеличить число одновременно используемых беспроводных измерительных устройств в рамках одной сети. Таким образом, обеспечивается расширяемость и мобильность системы.
Недостатком указанного аналога при решении задачи идентификации точек прицеливания имитатора стрелкового оружия является сложность и высокая стоимость технической реализации по отношению к предлагаемому способу, связанные с ограничениями на габаритно-массовые характеристики набора датчиков, а также с особенностью эксплуатации при высоком уровне разночастотных ударных и вибрационных воздействий, изменения температуры и необходимостью проведения калибровки оборудования, входящего в состав системы захвата движения.
Раскрытие изобретения
Существующий метод решения проблемы идентификации лазерных точек прицеливания посредством разделения области стрельбы на сектора и присвоения каждому используемому имитатору определенного сектора для стрельбы имеет ряд существенных недостатков, вызванных трудностью идентификации имитатора и расчета оценки по итогам выполнения упражнения обучающимся при произведении стрельбы не в отведенный для него сектор.
В связи с вышеизложенным технической задачей предлагаемого способа является решение проблемы идентификации лазерных точек прицеливания имитаторов стрелкового оружия и гранатометов без секторального разделения области стрельбы.
Сущность предлагаемого способа идентификации лазерных точек прицеливания как технического решения заключается в решении задачи идентификации точек лазерного прицеливания и реализации данного способа для имитаторов оружия электронного стрелкового тренажера посредством использования специализированного программного обеспечения, реализующего алгоритм поиска точек лазерного прицеливания и аппаратного комплекса.
Технический результат заключается в увеличении эффективности идентификации лазерных точек прицеливания с целью определения соответствующего имитатора.
Признаки, используемые для характеристики способов
Способ идентификации лазерных точек прицеливания характеризуется определенной последовательностью действий, которая обеспечивает решение целевой задачи с применением технологии разнесения по времени момента включения лазера в соответствии с сигналом синхроимпульса для последующей регистрацией видеокамерой в каждом отдельном кадре пары, состоящей из лазера и соответствующего ему светового индикатора, с целью обеспечения идентификации точки прицеливания с конкретными имитаторами.
Аппаратный комплекс включает в себя:
1) видеокамеру с мгновенным затвором «global shutter», приводимым в действие по сигналу от внешнего источника. Сенсор видеокамеры имеет повышенную чувствительность в ближнем ИК диапазоне. На камере установлен фильтр, отсекающий световое излучение в диапазоне до 715 нм.
2) массив индикаторов, состоящий из диодов ближнего ИК диапазона.
3) лазерные излучатели мощностью 3-5 мВт с длиной волны 750-780 нм.
4) генератор электрических синхронизирующих импульсов на базе PIC 18F4520.
Краткое описание чертежей
Фиг. 1 - общая схема.
1 - видеокамера;
2 - область захвата видеокамеры;
3 - экран;
4 - проектор;
5 - индикаторы;
6 - лазеры.
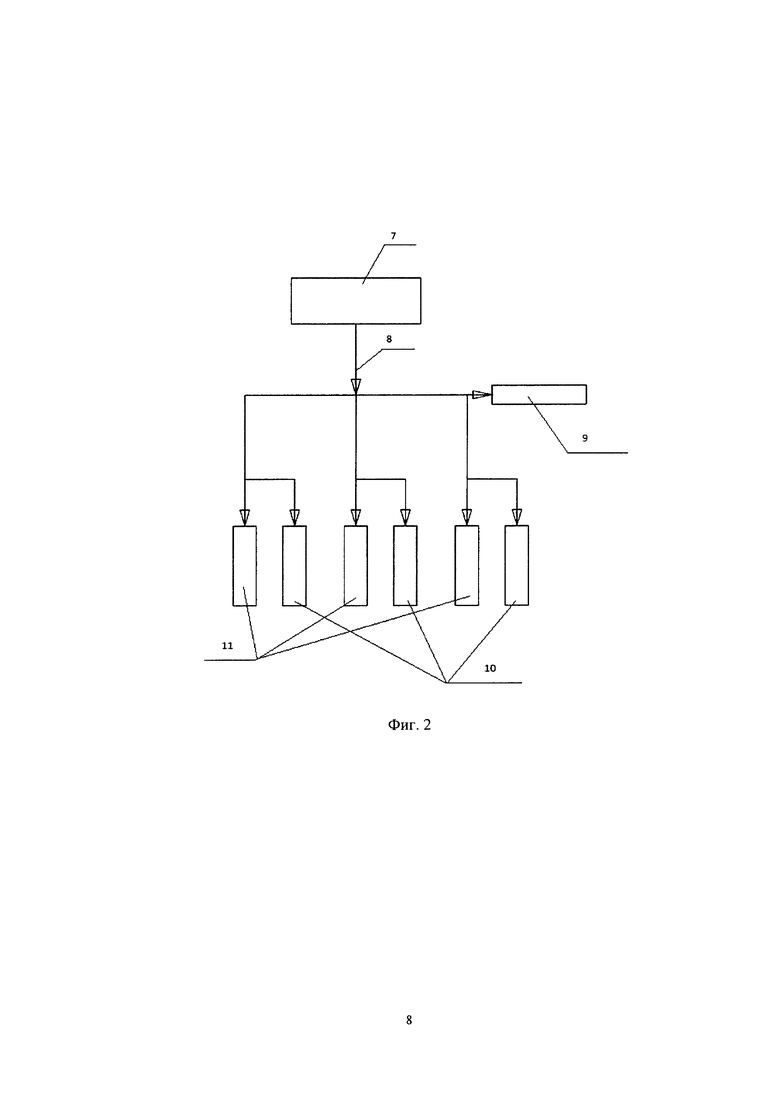
Фиг. 2 - работа генератора синхроимпульсов.
7 - генератор синхроимпульсов;
8 - синхроимпульс;
9 - видеокамера;
10 - индикаторы;
11 - лазеры.
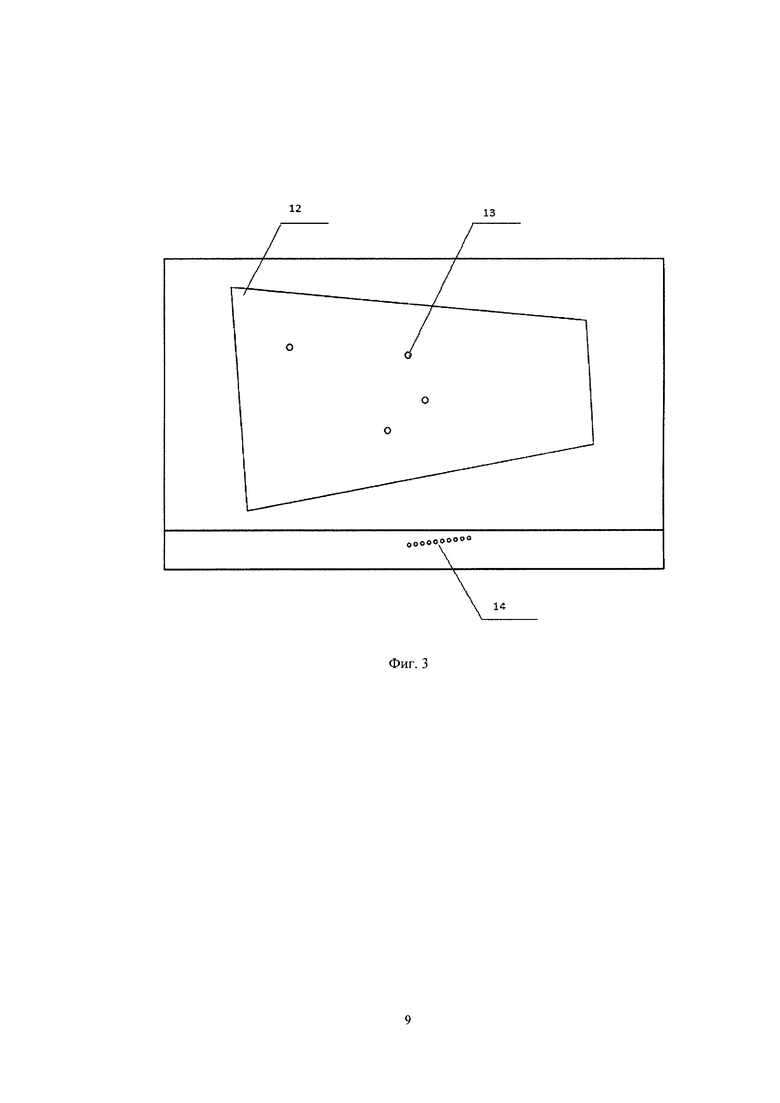
Фиг. 3 - изображение, фиксируемое видеокамерой.
12 - область проецирования проектора;
13 - пятно лазера;
14 - индикаторы.
Осуществление изобретения
Реализация способа идентификации лазерных точек прицеливания состоит в выполнении определенной последовательности действий, а именно:
1. Калибровка
Перед началом использования лазеров необходима предварительная процедура калибровки для определения и записи срединных координат индикаторов в системе координат видеокамеры. Процесс проведения калибровки позволяет отобразить все индикаторы в одном отдельно взятом кадре видеокамеры посредством включения световых индикаторов и выключения лазеров.
2. Включение лазера
Последовательность синхроимпульсов, поданных от генератора синхроимпульсов, инициирует процедуру последовательного включения пары лазер - световой индикатор от первой до последней пары с последующим повторением цикла (Фиг. 2).
Синхроимпульсу №1 соответствует пара лазер №1 - световой индикатор №1, синхроимпульсу №2 соответствует пара лазер №2 - световой индикатор №2, и т.д.
3. Процедура фиксации видеокамерой точек лазера и индикатора
В процессе работы имитаторов оружия электронного стрелкового тренажера в каждом новом кадре видеокамеры фиксируются координаты пятна лазера и соответствующего ему индикатора (Фиг. 3), а также производится анализ кадра видеокамеры посредством использования имеющихся координат индикаторов, выявленных в процессе калибровки.
Анализ кадра видеокамеры заключается в проверке яркости пикселов кадра по координатам индикаторов. Если яркость превышает определенный предел, то считается, что индикатор горит. Координаты индикаторов связаны с соответствующими номерами лазеров имитаторов и, зная координаты горящего индикатора, устанавливается номер имитатора.
Таким образом, при частоте видеокамеры 200 кадров/сек каждая пара работает ориентировочно 5 мс, 10 пар по 5 мс дает 50 мс на обновление всех абонентов, соответственно 1000 мс / 50 мс дает частоту обновления всех абонентов равную 20 Гц.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР "ТЭСТ" | 2016 |
|
RU2640952C2 |
| СТРЕЛКОВЫЙ ТРЕНАЖЁР | 2019 |
|
RU2774375C2 |
| Способы определения точки наведения оружия на изображении фоно-целевой обстановки в стрелковых тренажерах и устройство для их осуществления | 2015 |
|
RU2627019C2 |
| Тренировочный стрелковый комплекс | 2023 |
|
RU2813346C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР | 2002 |
|
RU2310150C2 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ | 2000 |
|
RU2185586C1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ И ПОРАЖЕНИЯ | 2014 |
|
RU2537872C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР КОЛЛЕКТИВНОГО БОЯ | 2002 |
|
RU2211433C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР ДЛЯ КОМПЬЮТЕРНЫХ СИСТЕМ С ЦИФРОВЫМ ФОТОАППАРАТОМ | 2018 |
|
RU2698839C1 |
| ПРИЦЕЛ-ДАЛЬНОМЕР ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2013 |
|
RU2536186C1 |
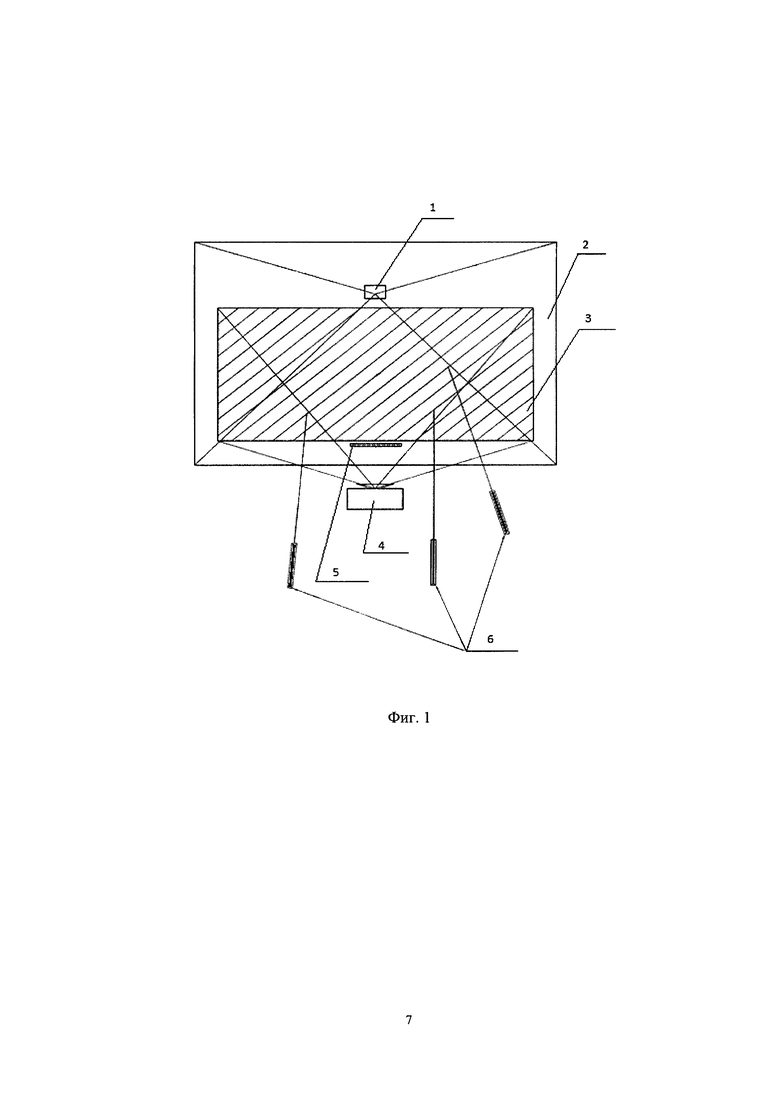
Изобретение относится к средствам, обеспечивающим обучение стрельбе из имитаторов стрелкового оружия и гранатометов, а именно к средствам имитации и идентификации точек прицеливания лазерных излучателей имитаторов. Способ характеризуется тем, что осуществляют калибровку для определения и записи срединных координат индикаторов в системе координат видеокамеры (1). Затем последовательно включают пары лазер (6) - световой индикатор (5) от первой до последней пары инициируемой последовательностью синхроимпульсов, поданных от генератора синхроимпульсов, и фиксируют видеокамерой (1) координаты пятна лазера (6) и соответствующего ему индикатора (5). Проводят анализ кадра видеокамеры (1) посредством использования имеющихся координат индикаторов (5), выявленных в процессе калибровки. При этом идентификацию лазерных точек прицеливания осуществляют без секторального разделения области стрельбы. Обеспечивается увеличение эффективности идентификации лазерных точек прицеливания. 3 ил.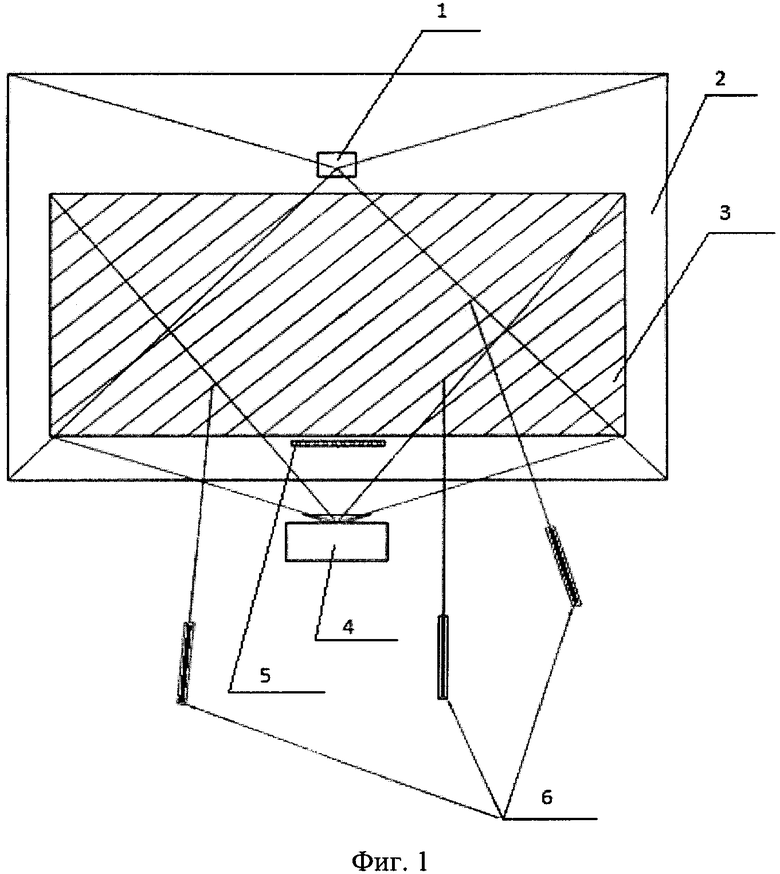
Способ идентификации лазерных точек прицеливания, характеризующийся тем, что осуществляют калибровку для определения и записи срединных координат индикаторов в системе координат видеокамеры, последовательно включают пары лазер - световой индикатор инициируемой последовательностью синхроимпульсов, поданных от генератора синхроимпульсов, фиксируют видеокамерой координаты пятна лазера и соответствующего ему индикатора, проводят анализ кадра видеокамеры посредством использования имеющихся координат индикаторов, выявленных в процессе калибровки, при этом идентификацию лазерных точек прицеливания осуществляют без секторального разделения области стрельбы.
| Машина для синтеза контактных схем | 1958 |
|
SU121947A2 |
| Экономайзер | 0 |
|
SU94A1 |
| US 4680012 A1, 14.07.1987 | |||
| US 7687751 B1, 30.03.2010. | |||

