Группа изобретений относится к области учебно-тренировочных средств и может быть использована для обучения и тренировок в стрельбе из спортивного, охотничьего и боевого оружия без использования боеприпасов, а также в симуляторах игровых систем типа пейнтбол и других.
Способы и устройства определения координат точки наведения оружия являются ключевыми при построении учебно-тренировочных и игровых систем с имитацией стрельбы, поскольку модели таких систем, в целом, отличаются от способов и устройств определения точки наведения только моделями ввода заранее известных дальностей до цели и баллистики выстрела.
В группе изобретений способы определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах характеризуются единым уровнем техники и общими аналогами.
Известен способ определения точки наведения оружия на изображении фоноцелевой обстановки, реализованный во многих лазерных системах, в частности в тренажере MSET-5000 корпорации LasershotInc, США, штат Техас, представленном в Интернет-ресурсе www.lasershot.com. Способ заключается в формировании вычислительными средствами двумерного сигнала фоноцелевой обстановки, преобразовании полученного сигнала в изображение фоноцелевой обстановки на плоском экране, кадрировании и юстировке этого изображения, подсветке лазерами, сопряженными с осями соответствующих стволов нескольких имитаторов оружия, меток наведения оружия на экране, фильтрации изображений меток наведения, преобразовании стационарной видеокамерой полученного после фильтрации изображения в двумерный регистрируемый сигнал, определение текущих координат изображений меток наведения в регистрируемом сигнале и определение координат точек наведения оружия по полученным координатам.
Недостатком этого способа является большая методическая погрешность определения координат, складывающаяся из множества систематических ошибок взаимного сопряжения оси имитатора оружия, лазера, расположения стрелка по трем координатам, координатных полей формируемых и регистрируемых сигналов и изображений. Другими недостатками способа являются ограниченность по числу одновременно обучающихся стрелков, по допустимым углам возвышения и свала оружия, а также сложность обеспечения временной стабильности характеристик реализаций способа. Недостатки обусловлены преимущественно механическими методами сопряжения семи систем координат, ограниченностью процедур идентификации меток по стрелкам, проективными преобразованиями геометрии изображений на экране, не учитываемыми в способе.
Известен способ определения точки наведения оружия на изображении фоноцелевой обстановки по авторскому свидетельству РФ №1136582, МПК F41G 3/26, "Способ контроля положения точки прицеливания при обучении стрельбе и устройство для его осуществления (его варианты)", опубликованном 10.10.1995. Способ включает формирование изображения фоноцелевой обстановки в заданном секторе пространства, облучение области попадания потоком электромагнитного излучения, изменяющегося по области и модулированного во времени в каждой точке области, прием электромагнитного излучения имитатором стрелкового оружия, определение характеристик интенсивности, периода и времени изменения принятого электромагнитного излучения, определение положения точки прицеливания имитатора стрелкового оружия по полученным и заданным характеристикам принятого излучения.
Недостатками данного способа являются низкая пространственная разрешающая способность по директориям как облучающего потока электромагнитного излучения, так и принимаемого электромагнитного излучения, что при реализации способа приводит к низкой точности и аномальным погрешностям определения точки наведения оружия, накладыванию существенных ограничений на масштабы, размещение и количество изображений целей на фоноцелевой обстановке. Другим недостатком способа является аномальные ошибки прицеливания при углах свала оружия, отличных от нуля. Недостатки определяются ограничениями по физической реализуемости динамических полей тонкой структуры и соответствующих дистанционных измерителей параметров, отсутствием в способе процедур определения и учета углов свала оружия.
Известен способ определения точки наведения оружия на изображении фоноцелевой обстановки, реализованный во многих оптико-электронных системах, в частности в оптико-электронном стрелковом тренажере коллективного боя по патенту РФ №2211433, МПК F41G, F41J, опубликованном 27.08.2003. Способ заключается в формировании вычислительными средствами двумерного сигнала фоноцелевой обстановки, преобразовании полученного сигнала в секционированное изображение на плоском экране, кадрировании и юстировке секций этого изображения с линейными датчиками координат, установленными стационарно перед экраном, подсветке в момент выстрела лучом лазера, сопряженным с осью ствола имитатора оружия, метки наведения оружия на соответствующей секции экрана, оптическом преобразовании изображения такой метки в изображения горизонтальной и вертикальной полос и преобразовании изображений этих полос линейными датчиками координат в сигналы, соответствующие координатам точки наведения оружия.
Недостатками данного способа являются невозможность одновременной работы по всему экрану несколькими имитаторами оружия, большая методическая погрешность определения координат, обусловленная систематическими погрешностями взаимного сопряжения пространственных положений имитаторов оружия, лазерных излучателей, оптических преобразователей изображений, датчиков вертикальных и горизонтальных координат. Недостатками способа также являются аномальные ошибки прицеливания при углах свала оружия, отличных от нуля, обусловленные отсутствием в способе необходимых процедур, и погрешности определения координат вследствие проективных преобразований изображений целей, возникающих при углах их наблюдения, отличных от 90 градусов.
Известен способ определения точки наведения оружия на изображении фоноцелевой обстановки по международной заявке "Система и способ обеспечения улучшенного сопровождения меток наведения оружия в тренажерах" № PCT/US 2005/025089 от 15.07.2005, МПК F41G, опубликованной 23.02.2006 № WO 2006/019974 А2. Способ включает формирование вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки, покадровое преобразование видеопроектором полученного сигнала в изображение фоноцелевой обстановки на плоском экране, подсветку в моменты выстрелов лучами лазеров, сопряженными с осями стволов нескольких имитаторов оружия, меток наведения оружия на экране, преобразование одной или несколькими стационарными видеокамерами изображения с экрана в двумерный регистрируемый сигнал, выделение в нем вычислительными средствами сигналов меток наведения, определение координат их центроид и отслеживание во времени траекторий и координат меток наведения с предсказанием и фильтрацией по принадлежности к имитаторам оружия.
Недостатками данного способа является большая совокупная погрешность определения координат точек наведения оружия, обусловленная систематическими погрешностями взаимного сопряжения пространственных положений имитаторов оружия, лазерных излучателей, видеопроектора, видеокамеры, отсутствие встроенных процедур учета и компенсации этих погрешностей, а также сложность обеспечения временной стабильности характеристик реализаций способа. Другими недостатками способа являются аномальные ошибки прицеливания при углах свала и возвышения оружия, отличных от нуля, методическая сложность разделения сигналов меток наведения с ростом числа одновременно обучаемых стрелков.
Наиболее близким по технической сущности и существенным признакам является способ определения точки наведения оружия на изображении фоноцелевой обстановки, реализованный в тренажере для подготовке стрелков по патенту на полезную модель №32873, МПК F41G 3/26, опубликованном 27.09.2003. Способ включает формирование вычислительными средствами в режиме настройки последовательности кадров двумерного тестового сигнала, содержащего сигналы тестовых маркеров с задаваемыми координатами, покадровое преобразование видеопроектором тестового сигнала в тестовое изображение на плоском экране, наложение на тестовое изображение изображений координатных маркеров, преобразование посредством видеокамеры изображения с экрана и его окрестностей в двумерный регистрируемый тестовый сигнал, центральный элемент которого сопряжен с осью ствола имитатора оружия, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала, определение и запоминание координат координатных маркеров относительно поля сигнала тестового изображения в качестве эталонных, формирование вычислительными средствами в рабочем режиме непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование изображения с экрана и его окрестностей в двумерный регистрируемый сигнал, определение текущих координат изображений координатных маркеров в регистрируемом сигнале и определение координат точки наведения оружия в сигнале изображения фоноцелевой обстановки.
Недостатком этого способа является большая методическая погрешность определения координат, складывающаяся из множества систематических ошибок взаимного сопряжения оси имитатора оружия, расположения стрелка по трем координатам, координатных полей формируемых и регистрируемых сигналов и изображений. Другими недостатками способа являются ограниченность по числу одновременно обучающихся стрелков, по допустимым углам возвышения и свала оружия, а также сложность обеспечения временной стабильности характеристик реализаций способа. Недостатки обусловлены преимущественно механическими методами сопряжения семи систем координат, отсутствием процедур идентификации меток по обучаемым стрелкам, проективными преобразованиями геометрии изображений, не учитываемыми в способе.
Целью первого изобретения группы является достижение технического результата, заключающегося в повышении точности определения точки наведения оружия, расширении зоны допустимого размещения стрелков перед экраном, обеспечение обучения группы стрелков в реальных условиях единой фоноцелевой обстановки и расширение диапазонов допустимых углов возвышения и свала имитируемого оружия. Технический результат при осуществлении способа достигается в целом за счет сокращения с семи до четырех числа систем координат, подлежащих сопряжению, введению действий по определению и учету проективных искажений координатных плоскостей, по обеспечению независимой обработки выстрелов нескольких стрелков, достижения инвариантности обработки изображений в расширенных диапазонах углов возвышения и свала имитируемого оружия.
Для достижения указанного технического результата в способе определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающем формирование вычислительными средствами в режиме настройки последовательности кадров двумерного тестового сигнала, содержащего сигналы тестовых маркеров с задаваемыми координатами, покадровое преобразование видеопроектором тестового сигнала в тестовое изображение на плоском экране, наложение на тестовое изображение изображений координатных маркеров, преобразование посредством видеокамеры изображения с экрана и его окрестностей в двумерный регистрируемый тестовый сигнал, центральный элемент которого сопряжен с осью ствола имитатора оружия, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала, определение и запоминание координат координатных маркеров относительно поля сигнала тестового изображения в качестве эталонных, формирование в рабочем режиме вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование изображения с экрана и его окрестностей в двумерный регистрируемый сигнал, определение текущих координат изображений координатных маркеров в регистрируемом сигнале и определение координат точки наведения оружия на изображении фоноцелевой обстановки дополнительно вводят в элементы всех сигналов и изображений компоненты, описывающие цветовые оттенки этих элементов в базовых цветах, выбирают количество координатных маркеров не менее четырех, определяют характеристики формы, размера, цвета и относительного расположения сигналов изображений координатных маркеров и запоминают их в качестве эталонных характеристик. После преобразования изображений фоноцелевой обстановки и координатных маркеров с экрана и его окрестностей в регистрируемый сигнал, дополнительно выделяют в нем сигналы изображений координатных маркеров и, помимо текущих координат, определяют их текущие характеристики. Далее по эталонным и текущим характеристикам идентифицируют размещение координатных маркеров в регистрируемом сигнале, по текущим и эталонным координатам не менее четырех идентифицированных маркеров рассчитывают элементы матрицы А проективных преобразований сформированного и регистрируемого изображений фоноцелевой обстановки, а координаты точки прицеливания в сигнале изображения фоноцелевой обстановки определяют умножением вектора координат центрального элемента регистрируемого сигнала на обращенную матрицу А. Преобразование изображений с экрана и его окрестностей в регистрируемые сигналы, а также все последующие действия с этими сигналами и зависящие от них, выполняют аналогично для каждого используемого имитатора оружия с сопряженной с ним отдельной видеокамерой, получая несколько, в общем различных, матриц проективных преобразований и точек наведения, соответствующих отдельным имитаторам оружия.
Количество и размещение изображений координатных маркеров в области экрана и размеры координатного поля регистрируемого и регистрируемого тестового сигналов выбирают так, чтобы в заданных диапазонах углов возвышения, упреждения и свала имитатора оружия и для любых координат целей в сигнале фоноцелевой обстановки обеспечить попадание в регистрируемые сигналы сигналов не менее четырех координатных маркеров, координаты которых позволяют образовать в координатном поле не менее одного четырехугольника.
Характеристики формы, размера, цвета и относительного расположения координатных маркеров выбирают так, чтобы их компоненты, сочетания и производные параметры обеспечили выделение и идентификацию сигналов координатных маркеров в регистрируемом и регистрируемом тестовом сигналах.
Однако охарактеризованный и раскрытый выше способ также имеет недостатки, заключающиеся в низкой долговременной стабильности точностных характеристик, обеспечиваемых способом, сложности и трудоемкости процедур минимизации систематических ошибок взаимного сопряжения систем координат имитаторов оружия, координатных полей формируемых и регистрируемых сигналов и изображений в режиме настройки. Недостатки обусловлены преимущественно механическими методами сопряжения четырех систем координат, случайными механическими воздействиями на координатные системы, возникающими при эксплуатации реализаций способа, необходимостью частого повторения сложных процедур режима настройки для поддержания требуемой точности определения точек наведения оружия нескольких стрелков.
Целью второго изобретения группы является достижение технического результата, заключающегося в повышении временной стабильности результатов определения точки наведения оружия и автоматизации действий по сопряжению систем координат. Причем первое изобретение группы используется во втором, а вместе они образуют единый изобретательский замысел. Технический результат при осуществлении второго способа достигается за счет введения совокупности действий, обеспечивающих оперативный учет суммарных погрешностей сопряжения координатных полей формируемых и регистрируемых сигналов и изображений.
Для достижения данного технического результата в способе определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающем в режиме настройки формирование вычислительными средствами последовательности кадров двумерного тестового сигнала с цветовыми компонентами, содержащего сигналы тестовых маркеров с задаваемыми координатами, покадровое преобразование видеопроектором тестового сигнала в тестовое цветное изображение на плоском экране, наложение на тестовое изображение не менее четырех цветных изображений координатных маркеров, преобразование посредством видеокамеры изображения с экрана и его окрестностей в двумерный регистрируемый тестовый сигнал с цветовыми компонентами, центральный элемент которого сопряжен с осью ствола имитатора оружия, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала, определение координат и характеристик формы, размера, цвета и относительного расположения сигналов изображений координатных маркеров относительно поля сигнала тестового изображения и запоминание их в качестве эталонных координат и характеристик, в рабочем режиме формирование вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в цветное изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование изображения с экрана и его окрестностей в двумерный регистрируемый сигнал с цветовыми компонентами, выделение в регистрируемом сигнале сигналов изображений координатных маркеров и определение их текущих координат и характеристик, идентификацию размещения координатных маркеров в регистрируемом сигнале по их эталонным и текущим характеристикам, расчет элементов матрицы А проективных преобразований сформированного и регистрируемого изображений фоноцелевой обстановки по текущим и эталонным координатам не менее четырех идентифицированных маркеров, определение координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки умножением вектора координат центрального элемента регистрируемого сигнала на обращенную матрицу А и аналогичное выполнение преобразований изображений с экрана и его окрестностей в регистрируемые сигналы, а также всех последующих действий с этими сигналами и зависящих от этих сигналов, для каждого используемого имитатора оружия с сопряженной с ним отдельной видеокамерой дополнительно выбирают формируемый двумерный тестовый сигнал в виде однотонного поля, выбирают количество встраиваемых в этот сигнал тестовых маркеров с задаваемыми координатами не менее четырех, задают характеристики формы, размера, цвета и относительного расположения тестовых маркеров, задают координаты и характеристики координатных маркеров, отличающиеся от координат и характеристик тестовых маркеров. После наложения на тестовое изображение с тестовыми маркерами изображений координатных маркеров ориентируют любой из имитаторов оружия и сопряженное с ними координатное поле регистрируемого тестового сигнала так, чтобы обеспечить попадание в этот регистрируемый тестовый сигнал изображений всех тестовых и координатных маркеров. После преобразования изображения с экрана и его окрестностей в двумерный регистрируемый тестовый сигнал выделяют в нем сигналы тестовых и координатных маркеров, определяют наблюдаемые координаты и характеристики этих маркеров, идентифицируют размещение тестовых маркеров в регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам. Затем рассчитывают элементы матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений по задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров, определяют координаты каждого координатного маркера относительно поля сигнала тестового изображения умножением вектора наблюдаемых координат соответствующего координатного маркера на обращенную матрицу F и запоминают их в качестве эталонных координат координатных маркеров, корректируют характеристики относительного расположения сигналов изображений координатных маркеров по соответствующим эталонным координатам и вместе с заданными характеристиками формы, размера, цвета запоминают их в качестве эталонных характеристик координатных маркеров.
Все рассмотренные аналоги, а также охарактеризованные и раскрытые выше способы, имеют существенный методологический недостаток, обусловленный самими принципами решения задачи определения точки наведения оружия. В этих способах прицеливание осуществляют непосредственно по изображению на экране, а координаты точки наведения определяют опосредованно, по сигналам датчиков, меткам, маркерам в сопрягаемых с реальным изображениям системах и их координатных полях. Искажение изображения или даже его исчезновение никак не сказывается на работоспособности способов и их реализаций. Искажения, вносимые при преобразованиях сигналов в изображения и изображений в сигналы (видеопроектора и видеокамеры с объективами), могут достигать нескольких линейных размеров целей, отображаемых на экране.
Целью третьего изобретения группы является достижение технического результата, заключающегося в повышении точности определения точки наведения оружия на изображении фоноцелевой обстановки. При этом второе изобретение группы используется в третьем и вместе с первым они образуют единый изобретательский замысел. Технический результат при осуществлении третьего способа достигается за счет введения совокупности действий, обеспечивающих определение точных значений координат точки наведения оружия по результатам обработки непосредственно сигналов изображений.
Для достижения данного технического результата в способе определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающем в режиме настройки формирование вычислительными средствами последовательности кадров двумерного тестового сигнала с цветовыми компонентами в виде однотонного поля, содержащего сигналы не менее четырех тестовых маркеров с задаваемыми координатами и характеристиками формы, размера, цвета и относительного расположения, покадровое преобразование видеопроектором тестового сигнала в тестовое цветное изображение на плоском экране, наложение на тестовое изображение не менее четырех цветных изображений координатных маркеров с задаваемыми координатами и характеристиками, отличающимися от координат и характеристик тестовых маркеров, ориентацию любого из используемых имитаторов оружия и сопряженной с ним отдельной видеокамеры, обеспечивающую попадание в ее координатное поле изображений всех тестовых и координатных маркеров, преобразование посредством видеокамер используемых имитаторов оружия изображения с экрана и его окрестностей в двумерные регистрируемые тестовые сигналы с цветовыми компонентами, центральные элементы которых сопряжены с осями стволов соответствующих имитаторов оружия, подстройку координатных полей тестового изображения и регистрируемых тестовых сигналов, выделение в регистрируемом тестовом сигнале с выбранного и ориентированного имитатора оружия сигналов тестовых и координатных маркеров, определение в этом сигнале наблюдаемых координат и характеристик тестовых и координатных маркеров, идентификацию размещения тестовых маркеров в этом регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам, расчет элементов матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений по задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров, определение координат каждого координатного маркера относительно поля сигнала тестового изображения умножением вектора наблюдаемых координат соответствующего координатного маркера на обращенную матрицу F и запоминание их в качестве эталонных координат координатных маркеров, корректировку характеристики относительного расположения сигналов изображений координатных маркеров по соответствующим эталонным координатам и запоминание их вместе с заданными характеристиками формы, размера и цвета в качестве эталонных характеристик координатных маркеров, в рабочем режиме формирование вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в цветное изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование посредством видеокамер используемых имитаторов оружия изображения с экрана и его окрестностей в соответствующие двумерные регистрируемые сигналы с цветовыми компонентами, выделение в каждом регистрируемом сигнале сигналов изображений координатных маркеров и определение их текущих координат и характеристик, идентификацию положения координатных маркеров в каждом регистрируемом сигнале по их эталонным и текущим характеристикам, расчет элементов матриц А проективных преобразований сформированного и каждого регистрируемого изображений фоноцелевой обстановки по текущим и эталонным координатам не менее четырех идентифицированных маркеров и определение координат точек наведения оружия в сигнале изображения фоноцелевой обстановки умножением вектора координат центрального элемента для каждого регистрируемого сигнала на соответствующую обращенную матрицу А, после определения координат точек наведения оружия и для каждого регистрируемого сигнала дополнительно преобразуют область двумерного регистрируемого сигнала в окрестности его центрального элемента в приведенный сигнал в координатном поле сигнала фоноцелевой обстановки, определяют координаты подобласти наибольшего подобия приведенному сигналу в окрестности найденной точки наведения оружия в сигнале фоноцелевой обстановки, а координаты центрального элемента найденной подобласти используют в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки.
Векторы координат элементов приведенного сигнала получают умножением вектора координат каждого соответствующего элемента регистрируемого сигнала на обращенную матрицу А, а значения каждой цветовой компоненты каждого элемента приведенного сигнала в узлах координатного поля сигнала фоноцелевой обстановки получают интерполяцией значений соответствующих компонентов близлежащих элементов регистрируемого сигнала.
Размеры преобразуемой области регистрируемого сигнала задают такими, чтобы обеспечить более широкие диапазоны допустимых погрешностей преобразований сигналов и искажений координатных полей изображений для устойчивого определения подобласти наибольшего подобия в сигнале фоноцелевой обстановки, а размеры области поиска подобласти наибольшего подобия по каждой оси координат ограничивают для обеспечения однозначности определения такой подобласти.
Охарактеризованный и раскрытый выше способ также не свободен от недостатков. В отдельных случаях его применения возможно возникновение ситуаций, когда из-за больших углов возвышения и упреждения имитатора оружия в точке его наведения отсутствует изображение фоноцелевой обстановки. В других частных случаях изображение фоноцелевой обстановки в точках наведения оружия может включать протяженные изотропные области наряду с малоразмерными изображениями целей. Вследствие таких ситуаций могут возникать аномальные ошибки определения точных координат, для исключения которых необходимо накладывать дополнительные условия на характеристики формируемых изображений и применение способа.
Целью четвертого изобретения группы является достижение технического результата, заключающегося в расширении условий применения способа. При этом вместе четыре изобретения группы объединяет единый изобретательский замысел. Технический результат при осуществлении четвертого способа достигается за счет введения совокупности действий с сигналами и изображениями, обеспечивающих определение точных значений координат точки наведения оружия в расширенных диапазонах углов возвышения и упреждения имитаторов оружия, а также характеристик формируемых сигналов и изображений.
Для достижения данного технического результата в способе определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающем в режиме настройки формирование вычислительными средствами последовательности кадров двумерного тестового сигнала с цветовыми компонентами в виде однотонного поля, содержащего сигналы не менее четырех тестовых маркеров с задаваемыми координатами, характеристиками формы, размера, цвета и относительного расположения, покадровое преобразование видеопроектором тестового сигнала в тестовое цветное изображение на плоском экране, наложение на тестовое изображение не менее четырех цветных изображений координатных маркеров с задаваемыми координатами и характеристиками, отличающимися от координат и характеристик тестовых маркеров, ориентацию любого из используемых имитаторов оружия и сопряженной с ним отдельной видеокамеры, обеспечивающую попадание в ее координатное поле изображений всех тестовых и координатных маркеров, преобразование посредством видеокамер используемых имитаторов оружия изображения с экрана и его окрестностей в двумерные регистрируемые тестовые сигналы с цветовыми компонентами, центральные элементы которых сопряжены с осями стволов соответствующих имитаторов оружия, подстройку координатных полей тестового изображения и регистрируемых тестовых сигналов, выделение в регистрируемом тестовом сигнале с выбранного и ориентированного имитатора оружия сигналов тестовых и координатных маркеров, определение в этом сигнале наблюдаемых координат и характеристик тестовых и координатных маркеров, идентификацию размещения тестовых маркеров в этом регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам, расчет элементов матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений по задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров, определение координат каждого координатного маркера относительно поля сигнала тестового изображения умножением вектора наблюдаемых координат соответствующего координатного маркера на обращенную матрицу F и запоминание их в качестве эталонных координат координатных маркеров, корректировку характеристики относительного расположения сигналов изображений координатных маркеров по соответствующим эталонным координатам и запоминание их вместе с заданными характеристиками формы, размера и цвета в качестве эталонных характеристик координатных маркеров, в рабочем режиме формирование вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в цветное изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование посредством видеокамер используемых имитаторов оружия изображения с экрана и его окрестностей в соответствующие двумерные регистрируемые сигналы с цветовыми компонентами, выделение в каждом регистрируемом сигнале сигналов изображений координатных маркеров и определение их текущих координат и характеристик, идентификацию положения координатных маркеров в каждом регистрируемом сигнале по их эталонным и текущим характеристикам, расчет элементов матриц А проективных преобразований сформированного и каждого регистрируемого изображений фоноцелевой обстановки по текущим и эталонным координатам не менее четырех идентифицированных маркеров, определение координат точек наведения оружия в сигнале изображения фоноцелевой обстановки умножением вектора координат центрального элемента для каждого регистрируемого сигнала на соответствующую обращенную матрицу А, преобразование области каждого двумерного регистрируемого сигнала в окрестности его центрального элемента в соответствующий приведенный сигнал в координатном поле сигнала фоноцелевой обстановки и определение координат подобласти наибольшего подобия приведенному сигналу в окрестности найденной точки наведения соответствующего оружия в сигнале фоноцелевой обстановки, в каждом кадре после формирования двумерного сигнала фоноцелевой обстановки дополнительно задают показатели и критерии подобия сигналов изображений, проводят поиск и определяют координаты нескольких опорных точек с наилучшими показателями подобия подобластей сигнала фоноцелевой обстановки в окружающих областях этого же сигнала. Далее для каждого имитатора оружия при определении подобласти наибольшего подобия приведенному сигналу в окрестностях найденной точки наведения оружия, определяют также показатели подобия этой подобласти. Для найденных опорных точек умножением векторов их координат на матрицы А рассчитывают векторы координат этих опорных точек в регистрируемом сигнале, отбирают из числа опорных точек те точки, рассчитанные векторы координат которых попадают в координатное поле регистрируемого сигнала. Затем аналогичным образом выполняют преобразования областей регистрируемого сигнала в окрестностях отобранных опорных точек в приведенные сигналы, определяют координаты и показатели подобия подобластей наибольшего подобия приведенным сигналам в окрестностях отобранных опорных точек в сигнале фоноцелевой обстановки, определяют лучшую опорную подобласть наибольшего подобия по показателям подобия и минимальной разности координат этой подобласти и координат найденной точки наведения оружия. Если подобласть наибольшего подобия в окрестностях найденной точки наведения оружия имеет более высокие показатели подобия и ее координаты принадлежат координатному полю сигнала фоноцелевой обстановки, то координаты центрального элемента этой подобласти используют в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки. При невыполнении этих условий в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки используют координаты центрального элемента подобласти наибольшего подобия лучшей опорной точки, откорректированные на разность координат этой опорной точки и координат найденной точки наведения оружия.
Известно устройство определения точки наведения оружия на изображении фоноцелевой обстановки, реализованное в тренажере MSET-5000 корпорации LasershotInc, США, штат Техас, представленном в Интернет-ресурсе www.lasershot.com. Устройство содержит компьютер со встроенным блоком беспроводного интерфейса, монитор и видеопроигрыватель, соединенные с компьютером, видеокамеру и видеопроектор, подключенные соответственно к видеовходу и видеовыходу компьютера, оптический фильтр, установленный на видеокамере, проекционный экран и N имитаторов оружия с установленными на них лазерами и подключенными к ним блоками питания и интерфейса. Сигнал фоноцелевой обстановки формируется компьютером с помощью специального программного обеспечения и видеопроигрывателя и преобразуется видеопроектором и изображение на экране. Лазеры имитаторов оружия ультрафиолетового или инфракрасного диапазонов в моменты выстрелов формируют метки на экране. Изображения меток через оптический фильтр, отсекающий изображение фоноцелевой обстановки, поступают на стационарную видеокамеру и преобразуются в соответствующий видеосигнал, который обрабатывается в компьютере вместе с сигналами выстрелов, поступающих в компьютер по беспроводному интерфейсу с каждого имитатора оружия. По результатам обработки определяются координаты точек наведения оружия на изображении фоноцелевой обстановки в моменты имитированных выстрелов.
Недостатками этого устройства является низкая точность определения координат, ограниченность по числу N одновременно обучающихся стрелков, по допустимым углам возвышения и свала оружия. Недостатки обусловлены невозможностью выполнения точной и долговременной юстировки имитатора оружия, лазера, видеопроектора, расположения стрелка по трем координатам, изображения на экране и поля зрения видеокамеры, невозможностью учета углов свала оружия и проективных искажений геометрии наблюдаемого изображения.
Известно устройство определения точки наведения оружия на изображении фоноцелевой обстановки по авторскому свидетельству РФ №1136582, МПК F41G 3/26, "Способ контроля положения точки прицеливания при обучении стрельбе и устройство для его осуществления (его варианты)", опубликованном 10.10.1995. Устройство включает установленные перед экраном блок имитации визуальной фоноцелевой обстановки со светофильтром и блок облучения области попадания кодирующим излучением со светофильтром, имитатор оружия с блоком измерения яркости в удаленной точке с пороговым элементом, блок вычисления координат точки попадания, коммутатор, два блока памяти, модулятор интенсивности облучения области попадания. Вход коммутатора подключен к выходу блока измерения яркости, выходы коммутатора соединены с управляющими входами первого и второго блоков памяти. Информационные входы каждого из блоков памяти подключены к выходам модулятора интенсивности облучения точек области попадания, а выходы блоков памяти соединены со входами блока вычисления координат точки попадания. При этом полосы пропускания светофильтров блока имитации визуальной фоноцелевой обстановки и блока облучения области попадания кодирующим излучением отличны одна от другой, модулятор интенсивности облучения точек области попадания выполнен в виде диска с непрозрачными участками и радиальными рисками и включает также оптронные пары, счетчик импульсов, установочный и счетный входы которого соединены с оптронными парами, а выход подключен к информационным входам блоков памяти.
Недостатками устройства являются низкая точность определения точки прицеливания, ограниченность допустимых изображений фоноцелевой обстановки, неработоспособность на динамических изображениях, аномальные ошибки прицеливания при отличных от нуля углах свала и возвышения оружия. Недостатки определяются ограничениями по физической реализуемости динамических полей тонкой структуры и блока измерения яркости в удаленной точке с высокой пространственной разрешающей способностью, а также отсутствием блоков и компонентов, позволяющих устройству работать с несколькими обучаемыми, по динамической фоноцелевой обстановке.
Известно устройство определения точки наведения оружия на изображении фоноцелевой обстановки, реализованное в оптико-электронном стрелковом тренажере коллективного боя по патенту РФ №2211433, МПК F41G, F41J, опубликованном 27.08.2003. Устройство включает секционированный экран, проекторы по числу секций экрана, учебное оружие по числу стрелков с электрическими контактами, связанными со спусковыми крючками соответствующего оружия, оптико-электронные датчики вертикальных и горизонтальных координат по числу секций экрана, электронные блоки по числу оптико-электронных датчиков и компьютер с устройством отображения информации. Лазеры с радиаторами установлены стационарно и соединены световодами с объективами на соответствующем учебном оружии. Каждый из оптико-электронных датчиков содержит цилиндрический объектив, линейку фотоприемников и электронный блок, вход которого подключен к выходу линейки фотоприемников, а выход соединен с компьютером.
Недостатками данного устройства являются невозможность произвольной работы стрелков по всему экрану, низкая точность определения координат. Недостатки обусловлены погрешностями сопряжения пространственных положений имитаторов оружия, лазерных излучателей, оптических преобразователей изображений, датчиков вертикальных и горизонтальных координат, существенным влиянием на ошибки определения координат углов свала и возвышения учебного оружия, проективных преобразований изображений целей при их наблюдении с разных ракурсов.
Известно устройство определения точки наведения оружия на изображении фоноцелевой обстановки по международной заявке "Система и способ обеспечения улучшенного сопровождения меток наведения оружия в тренажерах" № PCT/US 2005/025089 от 15.07.2005, МПК F41G, опубликованной 23.02.2006 № WO 2006/019974 А2. Устройство включает видеопроектор, экран, видеокамеру в качестве устройства захвата последовательности видеокадров, компьютер слежения, компьютер отображения, как минимум один имитатор оружия с установленными на нем лазером и блоком интерфейса. Блоки интерфейсов, видеокамера и видеопроектор соединены соответствующими линиями обмена данными с компьютером слежения. Компьютер отображения отдельными линиями обмена данными соединен с компьютером слежения и видеопроектором. Могут использоваться лазеры видимого или невидимого оптического диапазона, с которым должен быть согласован диапазон чувствительности видеокамеры. Оптические метки прицеливания на экране от разных имитаторов оружия идентифицируются путем обнаружения новых меток, отслеживания и предсказания их положений в последовательностях смежных кадров вводимого в компьютер слежения изображения.
Недостатком устройства является низкая точность определения координат точек наведения оружия. Недостаток обусловлен погрешностями взаимного сопряжения пространственных положений имитаторов оружия, лазерных излучателей, видеопроектора и видеокамеры, существенным влиянием углов свала и возвышения оружия, а также ракурса наблюдения изображения.
Наиболее близким по технической сущности и существенным признакам является устройство определения точки наведения оружия на изображении фоноцелевой обстановки, использованное в тренажере для подготовки стрелков по патенту на полезную модель №32873, МПК F41G 3/26, опубликованном 27.09.2003. Устройство включает экран, вычислительную систему, подключенный к ее первому видеовыходу монитор, устройства управления, подключенные к выходу управления вычислительной системы, видеопроектор с системой регулирования, подключенный ко второму видеовыходу вычислительной системы, имитатор оружия и закрепленную на нем видеокамеру с системой регулирования и интерфейсом, выход которой соединен со входом видеоинтерфейса вычислительной системы. За полупрозрачным экраном устанавливают пару излучателей видимого диапазона волн и пару излучателей невидимого диапазона волн, по которым осуществляют подстройку координатных полей видеопроектора, экрана и видеокамеры в режиме настройки, а в рабочем режиме определяют координаты точки наведения оружия относительно координат изображений пары излучателей.
Недостатками данного устройства являются низкая точность определения координат, ограниченность по числу одновременно обучаемых стрелков и низкие эксплуатационные характеристики устройства. Недостатки обусловлены методическими погрешностями сопряжения пространственных положений входящих устройств, использованием преимущественно механических регулировок сопряжения, проективными преобразованиями геометрии изображений, отсутствием подсистем автоматического учета и компенсации методологических погрешностей и, в целом, недостатками способа определения координат, реализуемого устройством.
Целью пятого изобретения группы является достижение технического результата, заключающегося в повышении точности определения координат точки наведения оружия, расширении числа одновременно обучаемых стрелков и повышении эксплуатационных характеристик устройства. При этом пятое изобретение группы тесно связано с первыми четырьмя и вместе они образуют единый изобретательский замысел. Технический результат при осуществлении изобретения достигается за счет введения в известное устройство дополнительных блоков, связей и особенностей их конструктивного и аппаратно-программного исполнения.
Для достижения данного технического результата в устройстве определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающем экран, вычислительную систему, подключенный к ее первому видеовыходу монитор, устройства управления, подключенные ко входу управления вычислительной системы, видеопроектор с системой регулирования, подключенный ко второму видеовыходу вычислительной системы, имитатор оружия и закрепленную на нем видеокамеру с системами регулирования и интерфейса, выход которой соединен со входом видеоинтерфейса вычислительной системы, дополнительно введены имитаторы оружия по количеству одновременно обучаемых стрелков, такое же количество видеокамер с системами регулирования и интерфейсов, закрепленные на соответствующих имитаторах оружия, набор координатных маркеров и регулятор, вход которого подключен к выходу управления вычислительной системы, выход регулятора подключен к излучающим элементам координатных маркеров, а выходы дополнительных видеокамер соединены с соответствующими входами видеоинтерфейса вычислительной системы.
Вычислительная система, монитор, видеопроектор и видеокамеры выполнены таким образом, что они формируют, отображают и регистрируют цветные сигналы и изображения в единой цветовой системе координат, координатные маркеры расположены в одной плоскости с экраном, вблизи внешних границ проецируемых на него изображений, количество координатных маркеров в наборе и их размещение выбраны так, чтобы в заданных диапазонах углов возвышения, упреждения и свала имитаторов оружия и для любых положений изображений целей на экране обеспечить попадание в поле зрения любой видеокамеры не менее четырех координатных маркеров, изображения которых позволяют образовать не менее одного четырехугольника.
Каждый координатный маркер из набора выполнен в виде монохромного излучателя видимых или невидимых световых волн с регулируемой интенсивностью и установлен так, что его диаграмма направленности охватывает места размещения стрелков с имитаторами оружия перед экраном. Диапазон световой чувствительности видеокамер выбран так, что он охватывает длины волн излучателей координатных маркеров, а форма, размеры, цвет и асимметричность расположения координатных маркеров выбраны так, что обеспечивают их идентификацию в наборе при наблюдении не менее четырех таких маркеров.
Заявляемые технические решения обладают совокупностью существенных признаков, не известных из уровня техники подобного назначения, что позволяет сделать вывод о соответствии критерию "новизна" для изобретения.
Предлагаемые технические решения, по мнению заявителя и авторов, соответствуют критерию "изобретательский уровень", т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность заявляемых технических решений поясняется с помощью чертежей, где показаны:
- на фиг. 1 - пример тестового изображения с наложенными координатными полями;
- на фиг. 2 - диапазон спектральной чувствительности видеокамер;
- на фиг. 3 - пример размещения координатных маркеров в области экрана;
- на фиг. 4 - регистрируемое изображение при наведении оружия с углами возвышения, свала и ракурса;
-на фиг. 5 - пример изображений тестовых маркеров на экране;
- на фиг. 6 - расположение преобразуемой области регистрируемого изображения (сигнала) в режиме работы;
- на фиг. 7 - взаимное положение обрабатываемых областей сигнала изображения фоноцелевой обстановки;
- на фиг. 8 - пример наложения координатных полей приведенного сигнала и сигнала фоноцелевой обстановки;
- на фиг. 9 - определение значений приведенного сигнала интерполяционным кубическим сплайном;
- на фиг. 10 - пример регистрируемого изображения в реализации способа;
- на фиг. 11 - сечение двумерной взаимно корреляционной функции;
- на фиг. 12 - области обработки сигнала изображения фоноцелевой обстановки;
- на фиг. 13 - схема устройства для реализации способов.
На фигурах обозначены координатное поле тестового изображения 1, изображение тестовых маркеров 2, область (поле) 3 размещения координатных маркеров, изображения координатных маркеров 4, координатное поле регистрируемого изображения 5, проекция системы координат 6 имитатора оружия, расстояние линейного возвышения 7 корректной точки наведения оружия относительно точки прицеливания, изображение 8 цели, изображение (сигнал) фоноцелевой обстановки 9 в координатном поле хОу, преобразуемая область регистрируемого изображения (сигнала) 10, область 11 приведенного сигнала в координатном поле сигнала фоноцелевой обстановки, область 12 поиска наибольшего подобия приведенному сигналу, границы 13 областей поиска опорных точек, подобласть 14 сигнала фоноцелевой обстановки в области поиска опорной точки, найденные и отобранные опорные точки 15, найденная по координатным маркерам точка 16 наведения оружия, координатная разность 17 для корректировки точных координат наведения оружия, экран 18, вычислительная система 19, монитор 20, устройство 21 управления, видеопроектор 22, имитаторы 23 оружия, видеокамеры 24, набор 25 координатных маркеров, регулятор 26.
Начальной операцией первого способа в группе изобретений является формирование вычислительными средствами последовательности кадров двумерного тестового сигнала Bt(x,y), х∈[0, X-1], у∈[0, Y-1] в режиме настройки, например, в виде равно яркостного поля, содержащего сигналы тестовых маркеров с задаваемыми координатами. Все действия с сигналами и изображениями в группе изобретений осуществляются тем или иным способом для каждого кадра, в связи с чем обозначения кадров в описании опущены. Каждый элемент тестового сигнала и тестовых маркеров включает компоненты Btr(x,у), Btg(x,у), Btb(x,у) соответственно красного, зеленого и синего цветов в выбранном цветовом базисе RGB. Сигналы тестовых маркеров формируют, например, в виде моноцветных линий координатной сетки с задаваемыми интервалами и прямоугольниками по краям координатного поля.
Тестовый сигнал видеопроектором 22 преобразуют в тестовое цветное изображение Et(x,y) 1 на плоском экране 18, включающем изображение тестовых маркеров 2. Сопряженная с Bt(x,y) и Et(x,y) система координат обозначена на фиг. 1 как хОу. В плоскости экрана 18 и области 3, непосредственно прилегающей к координатному полю тестового изображения 1, на это изображение накладывают изображения не менее четырех координатных маркеров Emk(xmk,ymk) 4. Эти изображения могут формироваться, например, с помощью световых излучателей. Далее изображение с экрана 18 и его окрестностей в области 5, соответствующей координатному полю хрОрур регистрируемого тестового изображения Etp(xp,yp), преобразуют в регистрируемые тестовые сигналы Btp(xp,yp), xp∈[0, Хр-1],yp∈[0, Yp-1] c соответствующими цветовыми компонентами с помощью видеокамер 24. Затем осуществляют подстройку координатных полей тестового изображения 1 и регистрируемого тестового сигнала с помощью регулировок пространственных положений реализующих способ устройств, подстройки их параметров, использования вспомогательных приспособлений. При этом совмещают ось Оио системы координат 6 ствола имитатора оружия и ось Op системы координат регистрируемого изображения 5, вписывают изображение 1 в площадь экрана 18, симметрируют системы координат изображений Emk(xmk,ymk) и Etp(xp,yp). Поскольку регистрируемых сигналов может быть несколько, по числу используемых имитаторов 23 оружия, то аналогично проводят подстройку их полей координат, совмещение осей Oио, Op и симметрирование Etp(xp,yp). Тестовый сигнал и изображение, их координатные поля, экран и координатные маркеры едины для всех регистрируемых изображений и не требуют повторной подстройки.
Заключительными операциями первого способа в режиме настройки являются определение координат и характеристик формы, размера, цвета и относительного расположения сигналов изображений координатных маркеров относительно поля сигнала тестового изображения и запоминание их в качестве эталонных. В качестве координат координатных маркеров (xmk,ymk) фиг. 1 выбирают, например, координаты центральных элементов их изображений. Их определяют в системе координат хОу измерениями и интерполяцией по тестовым маркерам 2 в виде координатной сетки с известными координатами. Цвета координатных маркеров задают выбором длин волн излучателей в пределах спектрального диапазона чувствительности видеокамер фиг. 2, осуществляющих преобразование регистрируемого изображения в регистрируемые сигналы. В качестве характеристики цветов используют, например, векторы нормированных относительных яркостей голубой и зеленой компонент:

где Т - знак транспонирования. Так для k-ого излучателя (маркера) с длиной волны 625 нанометров согласно фиг. 2 вектор характеристик его цвета составит Emk=(0,042, 0,142)Т. Характеристики цвета координатных маркеров в режиме настройки могут быть уточнены по измеренным значениям их цветовых компонентов в регистрируемом сигнале Bpm(xpk,ypk). В качестве характеристики формы координатных маркеров используют, например, характеристику компактности cmk их изображений как геометрических фигур, равную отношению квадрата периметра фигуры hmk к ее площади smk:

Такая характеристика инвариантна к сдвигам, масштабам и вращениям изображений координатных маркеров и составляет 4π=12,57 для круга, 16 для фигуры квадрат. Компактность и ее составляющие выражают в количестве элементов регистрируемого сигнала (пикселях), принадлежащих изображениям координатных маркеров, и определяют их из анализа областей регистрируемого сигнала известными методами и алгоритмами. В качестве характеристик размещения K координатных маркеров используют, например, (K-1)-мерные векторы расстояний в правой декартовой системе координат хОу между текущим маркером и каждым последующим при их последовательном обходе (против часовой стрелки), нормированные по модулю наименьшего расстояния для каждого текущего координатного маркера:

где  - нормированный модуль расстояния от изображения (сигнала) координатного маркера k до изображения (сигнала) координатного маркера (k+i);
- нормированный модуль расстояния от изображения (сигнала) координатного маркера k до изображения (сигнала) координатного маркера (k+i);
 - угол между вектором расстояния и осью абсцисс.
- угол между вектором расстояния и осью абсцисс.
Таким образом, изображению (регистрируемому сигналу) каждого координатного маркера ставится в соответствие и запоминается в качестве эталонного вектор характеристик координатных маркеров или вектор признаков, компонентами которого являются векторы характеристик цвета, формы и размещения:

Вектор характеристик Пmk един для всех регистрируемых сигналов и имеет достаточное число степеней свободы для выбора переменных компонентов и обеспечения задачи идентификации координатных маркеров в требуемых диапазонах изменений углов возвышения, упреждения и свала имитаторов оружия, ракурсов и расстояний наблюдения изображений обучаемыми стрелками. В примере на фиг. 3 используют 12 координатных маркеров одинакового размера и цвета, но с асимметричным размещением, что позволяет идентифицировать маркеры по четырем и более соседним при углах поворота изображений от 0 до 360 градусов, ракурсах наблюдения плюс минус 60 градусов и изменениях масштаба в 3 раза. Применительно к размерам координатного поля тестового изображения X×Y маркеры от начала координат в левом нижнем углу поля имеют следующие координаты:
- нижний ряд по X:  ,
,  ,
,  ;
;
- верхний ряд по X:  ,
,  ,
,  ;
;
- левый ряд по Y:  ,
,  ,
,  ;
;
- правый ряд по Y:  ,
,  ,
, 
В реализациях способа могут быть использованы и другие сочетания характеристик координатных маркеров, например разные цвета при симметричном размещении и меньшем количестве маркеров, некомпланарное размещение рядов маркеров, прямоугольные формы маркеров, составные маркеры из нескольких пространственно разделенных маркеров и другие.
Чтобы обеспечить попадание в координатные поля регистрируемых сигналов 5 фиг. 1 изображений не менее четырех координатных маркеров 4, координаты которых позволяют образовать не менее одного четырехугольника в условиях изменения углов возвышения, упреждения и свала используемых имитаторов оружия в заданных диапазонах при прицеливании в любую точку координатного поля тестового изображения и изображения фоноцелевой обстановки, а также соответствующих им сигналов, размеры координатного поля 5 для каждой видеокамеры соответствующего имитатора оружия выбирают заведомо больше размеров координатного поля 1. Линейное превышение размеров по горизонтали может достигать 20% от X для реалистичных сценариев стрельб в зависимости от скоростей движения, дальностей, типов имитируемого оружия и целей. Линейное превышение размеров по вертикали в зависимости от дальностей, типов имитируемого оружия и целей может составлять от 20% до 100%от Y. Таким образом, выбранные размеры полей 5 наряду с ранее выбранными количеством и размещением координатных маркеров обеспечат и идентификацию маркеров в заданном диапазоне углов свала оружия. Вследствие выбора больших размеров, по сути, полей зрения видеокамер 24 их разрешающую способность по вертикали выбирают, как правило, в 2 раза выше четкости формируемых изображений.
В режиме работы первой операцией первого способа в группе изобретений является формирование вычислительными средствами последовательности кадров двумерного сигнала фоноцелевой обстановки в том же координатном поле тестового сигнала В(x,y), x ∈[0, Х-1], у ∈[0, Y-1]. Этот сигнал включает цветовые компоненты в том же базисе. Сигнал В(х,у) видеопроектором 22 преобразуют в цветное изображение фоноцелевой обстановки E(x,y) в том же координатном поле xOy1 фиг. 1. На это изображение накладывают изображения тех же координатных маркеров Emk(xmk,ymk) 4, векторы характеристик которых Пmk были запомнены в качестве эталонных в режиме настройки. Затем изображение с экрана 18 и его окрестностей в области 5, соответствующей координатному полю xpOpyp регистрируемого изображения Ep(xp,yp), преобразуют в двумерные регистрируемые сигналы фоноцелевой обстановки Bp(xp,yp), xp∈[0, Хр-1], yp∈[0, Yp-1] с соответствующими цветовыми компонентами с помощью видеокамер 24 каждого имитатора 23 оружия.
Далее, в каждом из этих сигналов выделяют сигналы изображений координатных маркеров 4, определяют их координаты, характеристики и идентифицируют маркеры по их эталонным и текущим характеристикам.
Выделение сигналов изображений координатных маркеров 4 в регистрируемых сигналах фоноцелевой обстановки производят для каждого i-го элемента Bpi(xpi,ypi) по совпадению вектора его цветовых компонент (bib/r,big/r)T, в общем случае с точностью  , запомненным в качестве эталонных векторам нормированных относительных яркостей голубой и зеленой компонент Emk. Для рассматриваемого примера с одинаковыми цветами всех k координатных маркеров условия будут следующими:
, запомненным в качестве эталонных векторам нормированных относительных яркостей голубой и зеленой компонент Emk. Для рассматриваемого примера с одинаковыми цветами всех k координатных маркеров условия будут следующими:

Точность соответствия, или допуски, εbg задают алгоритмически в конкретных реализациях способа, в абсолютных или процентных величинах, одинаковыми или различными для цветовых составляющих. Компактные множества выделенных элементов изображений координатных маркеров в каждом регистрируемом изображении объединяют в сигналах их изображений оператором связности каждого k-ого множества:

Операторы связности хорошо известны и описаны, например, в Грузман И.С., Киричук B.C., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах: Учебное пособие. - Новосибирск: Изд-во НГТУ, 2002. - 352 с. Для каждого и всех выделенных в каждом регистрируемом сигнале Bpmk рассчитывают характеристики компактности cmk по выражению (2) и характеристики размещения dmk по выражению (3), формируя тем самым в соответствии с (4) векторы характеристик координатных маркеров Пpmk для каждого выделенного сигнала маркера в соответствующем регистрируемом сигнале. В качестве координат (xpmk,ypmk) этих маркеров в выражении (6) принимают координаты геометрического, медианного центра или центра тяжести элементов выделенных множеств Bpi(xpi,ypi)=bpi, определения и выражения для расчетов которых известны и описаны, например, в Т. Павлидис. Алгоритмы машинной графики и обработки изображений. - М.: Радио и связь, 1986. - 400 с. Идентификацию сигналов выделенных координатных маркеров в регистрируемых сигналах Bpmk их изображениям на фоноцелевой обстановке Em, то есть

где  - знак геометрической эквивалентности (координат),
- знак геометрической эквивалентности (координат),
Δ - вектор точности соответствия, или допусков, включающий подвектор εbg,
выполняют сопоставлением запомненных эталонных Пmk и полученных Пpmk характеристик координатных маркеров по известным методикам идентификации и распознавания геометрических образов, с учетом априорной информации о геометрии линий размещения маркеров при их обходе в выбранном направлении. В простейшем случае, методика заключается в итеративном переборе возможных размещений векторов признаков из K координатных маркеров по Kp выделенных в регистрируемом сигнале маркеров с учетом геометрических условий. В примере регистрируемого изображения на фиг. 4 с одного из имитаторов оружия, а следовательно, и в соответствующем ему регистрируемом сигнале, показаны Kp=6 координатных маркеров, попавших в поле координат регистрируемого сигнала (изображения) xpOpyp и идентифицируемых с маркерами в левом верхнем углу координатного поля изображения фоноцелевой обстановки хОу, показанными также на фиг. 3. Это изображение соответствует ориентации точки прицеливания в левом верхнем углу поля 1, с углом возвышения имитатора 23 оружия соответствующем линейному расстоянию 7 от изображения 8 цели до корректной точки наведения имитатора 23 оружия Op, углами ракурса наведения минус 45 градусов в плоскости zOx фиг.1 (ось z перпендикулярна плоскости xOy), минус 10 градусов в плоскости zOy и углом свала имитатора 23 оружия 45 градусов в плоскости xOy. Фиг. 4 также демонстрирует проективные искажения исходных характеристик изображений координатных маркеров 4, которые учитывают в реализациях способа корректным выбором допусков Δ.
Далее, полученные обработкой каждого регистрируемого сигнала координаты (xpmk,ypmk) координатных маркеров и соответствующие им эталонные координаты (xmk,ymk) используют для расчета в однородных координатах (в расширенном координатном пространстве) матрицы А проективных преобразований сформированного и регистрируемого изображений фоноцелевой обстановки. Проективные преобразования сигналов изображений известны и широко применяются в компьютерной графике различного назначения, при производстве кинофильмов и телевизионных программ, в видеотрансляциях и репортажах. Методы и алгоритмы расчета элементов матрицы А также известны, например метод парных точек, Никулин Е.А. Компьютерная геометрия и алгоритмы машинной графики. - СПб.: БХВ-Петербург, 2003. - 560 с.:
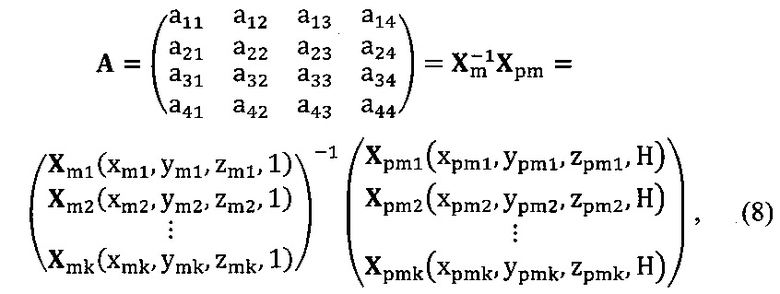
где  - обратная матрица вектора группы векторов эталонных координат координатных маркеров;
- обратная матрица вектора группы векторов эталонных координат координатных маркеров;
Xpm - матрица вектора группы векторов регистрируемых координат координатных маркеров;
H - плоскость проективного проецирования в расширенном координатном пространстве. Раскрытие выражения (8) дает k систем уравнений вида:
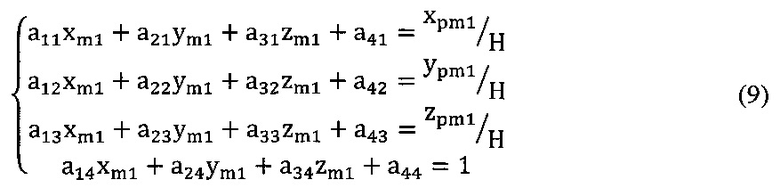
Система упрощается, если учесть, что элементы zm1=0в (9) ввиду размещения всех координатных маркеров в одной, нулевой плоскости фиг. 1, а элементы третьего столбца матрицы А равны нулю при проецировании на нулевую z-плоскость регистрируемого изображения. Тогда получим k систем упрощенных уравнений с десятью неизвестными, всего двенадцать уравнений при использовании координат четырех координатных маркеров, k=4. Особенности условий переопределенности систем уравнений при k≥4 и компланарности пар координатных точек разрешают упрощением системы (приравнивание Н=1) или расчетом среднеквадратических оценок элементов матрицы А из уравнения (Д. Роджерс, Дж. Адамс. Математические основы машинной графики: Пер. с англ. / Пер. Ю.П. Кулябичев, В.Г. Ивахненко; ред. Ю.И. Топчиев. - М.: Машиностроение, 1980. - 240 с.):

Для расчетов элементов проективных преобразований могут быть использованы другие известные методы и комбинации методов, например, Д.О. Чехлов, С.В. Абламейко. Нормализация изображений относительно перспективного преобразования на основе геометрических параметров. - Информатика, 2004, №3, с. 67-76.
Заключительной операцией первого изобретения группы является определение координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки умножением вектора координат центрального элемента регистрируемого сигнала в расширенном координатном пространстве на обращенную матрицу А с учетом совпадения начала координат регистрируемого сигнала и изображения с его центральным элементом:

В результате расчетов по выражению (9) для каждого имитатора 23 оружия и соответствующих ему регистрируемого сигнала и рассчитанной матрицы проективных преобразований получают независимые от других координаты точки наведения данного оружия в едином сигнале изображения фоноцелевой обстановки. Введение в известный ближайший аналог способа совокупности действий по определению и учету перспективных искажений координат позволило повысить точность определения точки наведения оружия непосредственно, а также вследствие появившейся и реализованной возможности сократить с семи до четырех, фиг. 1, число сопрягаемых систем координат в сравнении с прототипом. Этим же обеспечен технический эффект расширения зоны допустимого размещения стрелков перед экраном, что в свою очередь, совместно с введенными операциями регистрации и обработки нескольких сигналов изображений единой фоноцелевой обстановки, позволило увеличить число одновременно обучаемых стрелков. Технический эффект расширения допустимых диапазонов углов возвышения и свала имитируемого оружия достигнут за счет совокупности действий по расширению количества используемых опорных маркеров, их параметрической селекции, в том числе по цветовым характеристикам. Эти действия в числе других также обеспечивают операции по определению и учету перспективных искажений, что говорит о тесных взаимосвязях новых действий, о неразрывном единстве и целостности изобретательского замысла.
Начальной операцией второго способа в группе изобретений является формирование вычислительными средствами последовательности кадров двумерного тестового сигнала Bt(x,y), x∈[0, X-1], у∈[0, Y-1] в режиме настройки в виде однотонного поля, содержащего сигналы не менее четырех тестовых маркеров с задаваемыми координатами, характеристиками формы, размера, цвета и относительного расположения. Все действия с сигналами и изображениями в этом, как и в других изобретениях группы, осуществляются для каждого кадра, в связи с чем обозначения кадров в описании также опущены. Каждый элемент тестового сигнала и тестовых маркеров включает компоненты Btr(x,y), Btg(x,y), Btb(x,y) соответственно красного, зеленого и синего цветов в выбранном цветовом базисе RGB. Сигналы тестовых маркеров формируют, например, в виде четырех областей квадратной формы с нулевым сигналом, то есть черного цвета, и координатами (xml, yml), как показано на фиг. 5. Тестовый сигнал преобразуют видеопроектором 22 в тестовое цветное изображение Et(x,y) 1 на плоском экране 18, включающем изображение тестовых маркеров 2. Как и при осуществлении первого изобретения группы, на это изображение накладывают изображения не менее четырех координатных маркеров Emk(xmk,ymk) 4 с координатами и характеристиками, отличающимися от координат и характеристик тестовых маркеров, фиг. 5. Далее, изображение с экрана 18 и его окрестностей в области 5, соответствующей координатному полю xpOpyp регистрируемого тестового изображения Etp(xp,yp) преобразуют с помощью видеокамер 24 в двумерные регистрируемые тестовые сигналы Btp(xp,yp), xp∈[0, Хр-1], yp∈[0, Yp-1] с цветовыми компонентами, центральные элементы которых сопряжены с осями стволов соответствующих имитаторов 23 оружия. Затем осуществляют подстройку координатных полей тестового изображения и регистрируемого тестового сигнала таким же образом, как и при осуществлении первого изобретения группы. Подстройку выполняют для всех регистрируемых тестовых сигналов по числу используемых имитаторов 23 оружия. После этого выбирают любой из имитаторов оружия и ориентируют сопряженное с ними координатное поле регистрируемого тестового сигнала Btp(xp,yp) так, чтобы обеспечить попадание в этот сигнал изображений всех тестовых и координатных маркеров как это показано в примере на фиг. 5. В этом регистрируемом тестовом сигнале выделяют сигналы всех l тестовых и k координатных маркеров по заданным характеристикам маркеров (1, 2) и выражениям (5, 6) вышеописанными процедурами. По выделенным сигналам маркеров определяют их наблюдаемые координаты (xнmk,yнmk) и (хнml,унml), а также уточняют характеристики Пнmk и Пнml соответственно координатных и тестовых маркеров по выражениям (1-4), после чего идентифицируют размещение тестовых маркеров в регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам в соответствии с выражением (7). Следующей операцией способа является расчет элементов матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений по задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров. Расчет и методика его выполнения аналогичны расчету элементов матрицы А и выполняются в соответствии с выражениями (8, 9). Полученные результаты расчетов используют для определения координат каждого координатного маркера относительно поля сигнала тестового изображения путем умножения вектора наблюдаемых координат соответствующего координатного маркера на обращенную матрицу F. Полученные координаты запоминают в качестве эталонных координат координатных маркеров (xmk,ymk), корректируют по ним характеристики относительного расположения сигналов изображений координатных маркеров dmk и вместе с заданными характеристиками формы, размера и цвета Emk и cmk запоминают их в качестве эталонных характеристик координатных маркеров Пmk, выражение (4). На этом действия с сигналами и изображениями способа в режиме настройки завершаются, а полученные и запомненные эталонные координаты и характеристики координатных маркеров используют в дальнейшем в режиме работы для определения точек наведения всех имитаторов 23 оружия.
В режиме работы содержание и последовательность выполнения операций второго способа не отличаются от операций, осуществляемых в первом способе группы изобретений и подробно охарактеризованных выше. Совокупность операций составляют формирование вычислительными средствами последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами В(x,у) в том же координатном поле тестового сигнала xOy 1 фиг. 1, его преобразование видеопроектором 22 в цветное изображение фоноцелевой обстановки Е(х,y), наложение на это изображение изображения тех же координатных маркеров Emk(xmk,ymk) 4, преобразование изображения Ep(xp,ур) с экрана 18 и его окрестностей в области 5 фиг. 1 в двумерные регистрируемые сигналы фоноцелевой обстановки Bp(xp,ур) с соответствующими цветовыми компонентами с помощью видеокамер 24 каждого имитатора 23 оружия. За этими операциями следуют выделение в каждом из сигналов Bp(xp,ур) сигналов изображений координатных маркеров Bpmk(xpmk,ypmk), определение их координат и характеристик, идентификацию маркеров по их эталонным и текущим характеристикам в соответствии, например, с выражениями (5, 6, 7) с использованием (1-4), расчет элементов матриц А проективных преобразований для сформированного и каждого регистрируемого изображения фоноцелевой обстановки по выражениям (8, 9) и определение координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки для каждого имитатора оружия по выражению (10). В результате выполнения действий с сигналами и изображениями в рабочем режиме получают независимые координаты точек наведения каждого имитатора оружия в едином сигнале изображения фоноцелевой обстановки.
Введение в способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах согласно первому изобретению группы совокупности действий по автоматизации процедур точного определения координат координатных маркеров вместе с использованием точных значений координат специальных тестовых маркеров, задаваемых программно с дискретом в один элемент (пиксель), позволило простыми действиями, оперативно учитывать смещения координатных полей изображений на экране 18 при учете различных положений обучаемых стрелков и значительно снизить требования к точности первоначального размещения координатных маркеров. В свою очередь, это позволило сколь угодно часто повторять автоматизированные операции уточнения взаимного положения координатных полей и маркеров, обеспечивая тем самым повышение временной стабильности результатов определения точки наведения оружия как целевого технического результата использования изобретения.
Начальной операцией третьего способа определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах в группе изобретений является формирование вычислительными средствами в режиме настройки последовательности кадров двумерного тестового сигнала Bt(x,y) в виде однотонного поля, содержащего сигналы не менее четырех тестовых маркеров с задаваемыми координатами, характеристиками формы, размера, цвета и относительного расположения, фиг. 5. Это, а также все последующие действия с сигналами и изображениями в режиме настройки, выполняют идентично действиям по осуществлению второго изобретения группы, описанным выше. Эти действия, в частности, включают преобразование видеопроектором 22 тестового сигнала в тестовое цветное изображение Et(x,y) 1 с тестовыми маркерами 2, наложение на это изображение изображений не менее четырех координатных маркеров Emk(xmk,ymk) 4, фиг. 5, преобразование с помощью видеокамер 24 изображения с экрана 18 и его окрестностей в области 5 в двумерные регистрируемые тестовые сигналы Btp(xp,yp) с цветовыми компонентами, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала для всех регистрируемых тестовых сигналов по числу используемых имитаторов 23 оружия, выбор имитатора 23 оружия и ориентация сопряженного с ними координатного поля регистрируемого тестового сигнала Btp(xp,yp), фиг.5, выделение в этом в регистрируемом тестовом сигнале сигналов всех l тестовых и k координатных маркеров, определение наблюдаемых координат (хнmk,yнmk), (xнml,yнml) и уточнение характеристик Пнmk и Пнml соответственно координатных и тестовых маркеров, идентификацию размещения тестовых маркеров в регистрируемом тестовом сигнале, расчет элементов матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений, определение координат каждого координатного маркера относительно поля сигнала тестового изображения (xmk,ymk) и запоминание их в качестве эталонных, корректировку характеристик Пmk сигналов изображений координатных маркеров и запоминание их в качестве эталонных.
В режиме работы содержание и последовательность выполнения основных операций третьего способа из группы изобретений также не отличаются от операций по осуществлению второго способа группы изобретений. Совокупность действий с сигналами и изображениями составляют формирование вычислительными средствами последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами В(х,y) в координатном поле xOy 1, фиг. 1, его преобразование видеопроектором 22 в изображение фоноцелевой обстановки Е(х,y), наложение на это изображение изображений тех же координатных маркеров Emk(xmk,ymk) 4, преобразование изображения Ep(xp,ур) с экрана 18 и его окрестностей в области 5 фиг. 1 в двумерные регистрируемые сигналы фоноцелевой обстановки Bp(хр,yp) с помощью видеокамер 24 каждого имитатора 23 оружия, выделение в каждом из этих сигналов сигналов изображений координатных маркеров Bpmk(xpmk,ypmk), определение их координат и характеристик, идентификацию координатных маркеров, расчет элементов матриц А проективных преобразований и определение координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки для каждого имитатора 23 оружия.
В результате выполнения описанных действий с сигналами и изображениями в режиме настройки и в рабочем режиме получают независимые для каждого имитатора 23 оружия координаты точек наведения в едином сигнале изображения фоноцелевой обстановки.
Последующей операцией способа в режиме работы является преобразование области двумерного регистрируемого сигнала в окрестности его центрального элемента в приведенный сигнал в координатном поле сигнала фоноцелевой обстановки. Приводить регистрируемый сигнал Bp(xp,ур) в координатном поле xpOpyp 5 фиг. 6 к координатному полю xOy сигнала фоноцелевой обстановки B(x,у) для их сопоставления необходимо вследствие проективных преобразований изображения фоноцелевой обстановки 9 при его наблюдении обучаемым стрелком. Преобразуемая область 10 регистрируемого сигнала (изображения) включает сигнал (изображение) 8 цели и может быть, например, прямоугольной формы. Ее размеры задают так, чтобы обеспечить более широкие диапазоны допустимых погрешностей преобразований сигналов и искажений координатных полей изображений для устойчивого определения подобласти наибольшего подобия в сигнале фоноцелевой обстановки. При уменьшении размеров области возрастает вероятность аномального отождествления сигналов, а при увеличении возрастает вероятность потери малоразмерных целей. Экспериментальная отработка параметров алгоритмов показывает, что при формате изображений фоноцелевой обстановки 1920×1080 элементов размеры квадратной области со стороной от 48 до 80 элементов обеспечивают инвариантность способа к реальным погрешностям и искажениям на 95% практически используемых динамических сцен. Вектор координат каждого элемента приведенного сигнала получают умножением вектора координат каждого соответствующего i-го элемента регистрируемого сигнала на обращенную матрицу А. Для группы векторов области выражение для расчета будет подобно выражению (10), а значения цветовых компонент приведенного сигнала для каждого i-го элемента преобразуемой области сохранятся:

где i - нумерованный элемент сигнала, принадлежащий преобразуемой области регистрируемого сигнала. В результате преобразования (11) проективные искажения сигналов компенсируются, но область приведенного сигнала в координатном поле сигнала фоноцелевой обстановки приобретет форму 11 фиг. 7. При этом, в общем случае, масштабы и положение координатных полей xOy и xpOpyp не совпадают, фиг. 8. Требуется приведение значений сигнала к координатной сетке сигнала фоноцелевой обстановки, выполняемое хорошо известными методами интерполяции, например по книге Грузман И.С., Киричук B.C., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах: Учебное пособие. - Новосибирск: Изд-во НГТУ, 2002. - 352 с. При использовании, например, сепарабельной одномерной интерполяционной функции в виде кубического сплайна фиг. 9

где q∈[-1,-0,5] - коэффициент формы,
значения каждой цветовой компоненты каждого элемента приведенного сигнала в точках (x,у) координатного поля сигнала фоноцелевой обстановки получают по значениям сигналов близлежащих элементов регистрируемого сигнала в соответствии с выражением:

На фиг. 9 вертикальными столбцами показаны также четыре отсчета регистрируемого сигнала, два из которых с аргументами u=0,5, u=-1,5 войдут в сумму в выражении (12) с весами, равными ординатам интерполяционной функции в этих точках. Затем в окрестности найденной по координатным маркерам точки наведения оружия в сигнале фоноцелевой обстановки по выражению (10) выделяют область 12 сигнала Be(x,у) фиг. 7. Эта область должна включать сформированный, исходный сигнал изображения цели, вычисленные координаты которой могут отличаться от истинных вследствие аппаратных нелинейностей и погрешностей расчетов. Размеры этой области должны превосходить возможные величины погрешностей, но вместе с тем и быть ограниченными для однозначности сопоставления двумерных сигналов. Координаты центрального элемента (xO,yO) подобласти наибольшего подобия приведенному сигналу ВП(x,у) в сигнале Be(x,у) определяют, например, известными корреляционно-экстремальными методами: Е.В. Гошин, А.П. Котов, В.А. Фурсов. Двухэтапное формирование пространственного преобразования для совмещения изображений. - Компьютерная оптика, 2014, том 38, №4, с. 886-891. Алгоритм вычислений основан на поиске экстремума взаимной корреляционной функции двумерных сигналов изображений K{ВП,Ве} и описывается выражением:

где I×J - размеры области приведенного сигнала.
В качестве сигналов в выражении (13) могут использоваться как яркостные, представляющие собой сумму сигналов цветовых компонент, так и отдельные сигналы Br(i,j), Bg(i,j), Bb(i,j) красной, зеленой и синей компонент, а также предварительно обработанные сигналы для улучшения свойств корреляционной функции. В этом случае алгоритм реализации способа может дополняться процедурами выбора компонент, их корреляционных функций, селекции или усреднения таких функций, выбора или усреднения покомпонентных аргументов экстремумов функций и другими. Размеры 12 области поиска наибольшего подобия сигналов фиг. 7 при использовании алгоритмов вида (13) задают, как правило, в пределах от полутора до двух радиусов корреляции сигнала области (11). Для рассматриваемого примера оптимизированные задаваемые размеры составляли от 64 до 96 элементов, что подтверждено на 95% типовых сценах. Найденные по выражению (13) координаты используют в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки.
Для подтверждения осуществления и оценки технического эффекта реализации способа проведена серия экспериментов, в которых формат формируемых изображений составлял 1920×1080 элементов при частоте кадров 60 Гц, формат регистрируемого изображения - 3840×2748 элементов ×60 Гц, число градаций яркости/цветности сигналов изображений - от 16 до 256, количество координатных маркеров - 14, длина волны излучателей маркеров - 625 нм, размеры преобразуемых областей регистрируемого сигнала от 32 до 128 элементов по каждой из координат в различных сочетаниях, размеры областей поиска наибольшего подобия сигналов - от 64 до 150 элементов в различных сочетаниях, количество вариантов формируемых изображений фоноцелевой обстановки - 6, количество вариантов имитируемых условий погоды и времени суток - 5, количество типов целей на каждом изображении - 5, минимальные размеры целей - 12×9 элементов, количество имитаторов оружия с видеокамерой - 1. Фиг. 10 демонстрирует пример обрабатываемого изображения в одном из экспериментов. Результаты экспериментальных исследований показали следующее. Для координат, определяемых по координатным маркерам: максимальная погрешность составила 11 элементов, допустимый диапазон изменений углов свала имитатора оружия - от 0 до 360 градусов, допустимый диапазон углов наблюдения (ракурса) целей - от 0 до 50 градусов, диапазон изменений масштаба изображений фоноцелевой обстановки - 250%. Для точных координат точки наведения оружия, определяемых по сигналам изображений, математическое ожидание погрешности определения координат - плюс минус один элемент, среднеквадратическое отклонение погрешности - 1,6 элемента для вероятности 0,95 (максимальная погрешность 5 элементов), допустимая нелинейность изображения по растру - не менее 4% без оптимизации параметров алгоритма и до 9% с оптимизацией. При этом допустимые диапазоны изменения условий наблюдения изображений остались неизменными. Дополнительно проведены эксперименты по оценке устойчивости алгоритмов реализации способа к влиянию погрешностей компенсации проективных преобразований и аппаратных нелинейностей изображений фоноцелевой обстановки. Получено, что остаточные погрешности и нелинейности могут составлять по масштабам - не менее плюс-минус 10%, по углам ракурса - не менее плюс-минус 20%, по углам свала оружия - не менее плюс-минус 5%, что в основном обусловлено свойствами робастности корреляционно-экстремального метода сопоставления изображений и подтверждает достаточный инженерный запас точности выбора параметров при аппаратно-программной реализации способа.
Введенная в третий способ группы изобретений совокупность действий по определению точных значений координат точки наведения оружия непосредственно по изображению фоноцелевой обстановки позволила дополнительно снизить результирующие координатные погрешности. Полученный технический эффект также включает снижение требований к параметрам алгоритмов и характеристикам устройств при реализации способа и эксплуатации тренажерных систем, построенных на его основе.
В четвертом способе определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах согласно четвертому изобретению группы сохраняется существо и последовательность основных действий с сигналами и изображениями, осуществляемыми в третьем изобретении группы и подробно описанными выше. Эти операции в режиме настройки включают формирование вычислительными средствами последовательности кадров двумерного тестового сигнала, включающего сигналы не менее четырех тестовых маркеров с задаваемыми координатами, характеристиками формы, размера, цвета и относительного расположения, фиг. 5, преобразование видеопроектором 22 тестового сигнала в тестовое цветное изображение 1 с тестовыми маркерами 2, наложение на это изображение изображений не менее четырех координатных маркеров 4, фиг. 5, преобразование с помощью видеокамер 24 изображения с экрана 18 и его окрестностей в области 5 в двумерные регистрируемые тестовые сигналы с цветовыми компонентами, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала для всех регистрируемых тестовых сигналов по числу используемых имитаторов 23 оружия, выбор имитатора 23 оружия и ориентация сопряженного с ними координатного поля регистрируемого тестового сигнала, как показано на фиг. 5, выделение в этом в регистрируемом тестовом сигнале сигналов всех l тестовых и k координатных маркеров, определение наблюдаемых координат (xнmk,yнmk), (хнml,yнml) и уточнение характеристик Пнmk и Пнml соответственно координатных и тестовых маркеров, идентификацию размещения тестовых маркеров в регистрируемом тестовом сигнале, расчет элементов матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений, определение координат каждого координатного маркера относительно поля сигнала тестового изображения (xmk,ymk) и запоминание их в качестве эталонных, корректировку характеристик Пmk сигналов изображений координатных маркеров и запоминание их в качестве эталонных. В режиме работы операции включают формирование вычислительными средствами последовательности кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами B(x,у) в координатном поле xOy 1, фиг. 1, его преобразование видеопроектором в цветное изображение фоноцелевой обстановки E(x,у), наложение на это изображение изображения тех же координатных маркеров 4, преобразование изображения Ep(xp,ур) с экрана 18 и его окрестностей в области 5 фиг. 1 в двумерные регистрируемые сигналы фоноцелевой обстановки Bp(xp,ур) с помощью видеокамер 24 каждого имитатора 23 оружия, выделение в каждом из этих сигналов сигналов изображений координатных маркеров Bpmk(xpmk,ypmk), определение их координат и характеристик, идентификацию координатных маркеров, расчет элементов матриц А проективных преобразований, определение координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки для каждого имитатора 23 оружия, преобразование области 10 двумерного регистрируемого сигнала Bp(хр,ур) в окрестности его центрального элемента фиг. 6 в приведенный сигнал ВП(x,у) в координатном поле сигнала фоноцелевой обстановки xOy умножением вектора координат каждого i-го элемента регистрируемого сигнала на обращенную матрицу А и интерполяцией значений каждой цветовой компоненты каждого элемента приведенного сигнала в области 11 фиг. 7 по соответствующим сигналам близлежащих элементов регистрируемого сигнала фиг. 8 и 9, определение координат центрального элемента (xO,yO) подобласти наибольшего подобия приведенному сигналу в области 12 фиг. 7 сигнала фоноцелевой обстановки и использование этих координат в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки.
В рабочем режиме параллельно с описанными действиями задают показатель и критерии подобия сигналов изображений. При использовании корреляционных функций для установления подобий сигналов изображений, выражение (13), в качестве показателей применяют, например, значения функций в точках экстремумов Kmax(x,у), фиг. 11, значения функций в точках, отстоящих от экстремумов на небольшую величину в несколько элементов δ - max{Kmax(x±δ,y±δ)}, и значения функций в точках наибольших локальных экстремумов Kl.max(xi,yj), отстоящих от главного экстремума более чем на величину  , фиг. 11, и другие показатели. Для таких показателей критерии подобия задают в виде:
, фиг. 11, и другие показатели. Для таких показателей критерии подобия задают в виде:

где Kth - пороговое значение экстремума корреляционной функции;
Δ - показатель формы глобального экстремума;
 - показатель интенсивности локальных экстремумов.
- показатель интенсивности локальных экстремумов.
Для рассматриваемых условий и сильно зашумленных сигналов изображений пороговое значение задавалось равным 0,9, координатные смещения от глобального максимума  , что при форматах приведенных (искомых) сигналов 32×32 и 64×64 элементов составили соответственно ±2 и ±4 элемента. Показатели и критерии задаются алгоритмически и, как правило, не изменяются для используемого ряда изображений фоноцелевой обстановки. Далее, область сигнала изображения фоноцелевой обстановки 9 фиг. 12 разбивают на области 13 поиска опорных точек, в каждой такой области выделяют центральную подобласть 14, рассчитывают по соотношению в скобках правой части выражения (13) значения, по сути, автокорреляционной функции, определяют показатели подобия, применяют критерии (14) и ранжируют области по наилучшим показателям подобия центральных подобластей по критерию:
, что при форматах приведенных (искомых) сигналов 32×32 и 64×64 элементов составили соответственно ±2 и ±4 элемента. Показатели и критерии задаются алгоритмически и, как правило, не изменяются для используемого ряда изображений фоноцелевой обстановки. Далее, область сигнала изображения фоноцелевой обстановки 9 фиг. 12 разбивают на области 13 поиска опорных точек, в каждой такой области выделяют центральную подобласть 14, рассчитывают по соотношению в скобках правой части выражения (13) значения, по сути, автокорреляционной функции, определяют показатели подобия, применяют критерии (14) и ранжируют области по наилучшим показателям подобия центральных подобластей по критерию:

При этом координаты подобластей, отвечающих критериям (14), будут совпадать с координатами центральных элементов областей поиска и являться координатами найденных опорных точек 15 фиг. 12 в сигнале изображения фоноцелевой обстановки. Найденные опорные точки являются едиными для регистрируемых сигналов всех используемых имитаторов оружия, и их определение должно завершиться до преобразования областей 10 двумерных регистрируемых сигналов Bp(xp,ур) в окрестностях их центральных элементов фиг. 6 в приведенные сигналы ВП(x,у). Возможно также использование найденных в предыдущем кадре опорных точек в операциях с сигналами текущего кадра без существенных ограничений на динамику имитируемых сцен.
Затем для каждого имитатора 23 оружия и найденных опорных точек умножением векторов их координат на соответствующую матрицу А рассчитывают векторы координат этих опорных точек в соответствующем регистрируемом сигнале, отбирают те опорные точки, рассчитанные векторы координат которых попадают в координатное поле регистрируемого сигнала. Регистрируемый сигнал в окрестностях его центрального элемента и отобранных опорных точек преобразуют в соответствующие им области приведенных сигналов 11 фиг. 12 согласно выражений (10, 11, 12), определяют координаты и показатели подобия подобластей наибольшего подобия полученных приведенных сигналов сигналам областей фоноцелевой обстановки по выражениям (13) и (14), определяют лучшую опорную подобласть наибольшего подобия по показателям подобия согласно выражения (15) и минимальной разности координат этой подобласти и координат найденной по координатным маркерам точки наведения оружия. Завершающие действия способа включают проверку принадлежности координат точки наведения оружия 16 фиг. 12 координатному полю сигнала фоноцелевой обстановки 9, сравнение показателей подобия (15) приведенного сигнала в области найденной точки наведения и приведенного сигнала в области лучшей опорной точки. В качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки используют либо координаты центрального элемента подобласти наибольшего подобия в окрестностях найденной точки наведения оружия, если эта подобласть имеет более высокие показатели подобия и ее координаты принадлежат координатному полю сигнала фоноцелевой обстановки 9 фиг. 12, либо координаты центрального элемента подобласти наибольшего подобия лучшей опорной точки, откорректированные на разность координат этой опорной точки и координат найденной точки наведения оружия, в других случаях. Пример на фиг. 12 показывает, что найденная точка наведения оружия 16 лежит вне координатного поля сигнала фоноцелевой обстановки 9, в силу чего в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки должен использоваться вектор координат центрального элемента подобласти наибольшего подобия 11 лучшей опорной точки 15 (на фиг. 12 показана как ближайшая к точке 16) после его сложения с вектором 17. Фиг. 12 также показывает, что координаты центрального элемента подобласти наибольшего подобия не всегда совпадают с координатами центрального элемента области поиска из-за погрешностей расчетов и аппаратных нелинейностей устройств, реализующих способ. В результате осуществления операций способа получают независимые друг от друга точные координаты наведения для каждого используемого имитатора 23 оружия, которые меньше зависят от характеристик сигналов изображений фоноцелевой обстановки и положений точек наведения оружия.
Технический результат при осуществлении четвертого изобретения группы, заключающийся в расширении условий применения способа, выражается в сокращении аномальных ошибок определения координат наведения оружия в условиях расширенных диапазонов углов возвышения и упреждения имитаторов оружия, а также гладкости и низкой детальности формируемых изображений фоноцелевой обстановки. Результат достигается за счет введения и использования в способе показателей и критериев подобия двумерных сигналов, формирования дополнительных опорных точек, сопряженных с точками наведения оружия, и реализованной возможности выбора лучшего из нескольких решений.
В пятом изобретении группы устройство определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, структурная схема которого показана на фиг. 13, содержит экран 18, вычислительную систему 19, монитор 20, подключенный к первому видеовыходу вычислительной системы 19, ко входу управления которой подключены устройства 21 управления, видеопроектор 22 с системой регулирования, подключенный ко второму видеовыходу вычислительной системы 19, имитаторы 23 оружия по числу одновременно обучаемых стрелков, закрепленные на имитаторах 23 оружия видеокамеры 24 с системами регулирования и интерфейса, набор 25 координатных маркеров и регулятор 26, вход которого подключен к выходу управления вычислительной системы 19, а выход - к излучающим элементам координатных маркеров. Выходы видеокамер 24 подключены ко входам видеоинтерфейса вычислительной системы проводными или беспроводными линиями передачи данных. В последнем случае видеокамеры 24 должны включать встроенные источники питания. Устройства 21 управления представляют собой, например, клавиатуру и манипулятор "мышь". В качестве регулятора 26 может быть использован управляемый источник питания излучающих элементов координатных маркеров. Вычислительную систему 19 строят на базе одного или нескольких персональных компьютеров либо серверов высокой суммарной производительности вычислений. Имитаторы 23 оружия выполнены в виде полномасштабной копии реальных образцов оружия с элементами крепления видеокамер 24. При этом электрические контакты спусковых крючков имитаторов 23 подсоединяют к цепям "снимок" систем интерфейсов соответствующих видеокамер 24.
Вычислительная система 19, монитор 20, видеопроектор 22 и видеокамеры 24 выбраны и предварительно настроены для, соответственно, формирования, отображения и регистрации цветных сигналов и изображений в единой цветовой системе координат, например RGB. Набор 25 координатных маркеров расположен в одной плоскости с экраном 18, вблизи внешних границ проецируемых на него изображений. Каждый координатный маркер из набора выполнен в виде монохромного излучателя видимых или невидимых световых волн с регулируемой интенсивностью и установлен так, что его диаграмма направленности охватывает места размещения стрелков с имитаторами 23 оружия перед экраном 18. При этом диапазон световой чувствительности видеокамер 24, фиг. 2, выбран так, что он охватывает длины волн излучателей координатных маркеров.
Поскольку рассматриваемое устройство входит в описываемую группу изобретений, осуществляет способы определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, тесно связано со способами и образует единый изобретательский смысл, то характеристики выбираемых для использования в устройстве элементов предварительно рассчитывают и определяют при разработке образцов устройства по параметрам и условиям реализации способов из группы изобретений.
Количество координатных маркеров в наборе 25 и их распределение вокруг экрана 18 выбирают так, чтобы в заданных диапазонах углов возвышения, упреждения и свала имитаторов 23 оружия и для любых положений изображений целей на экране обеспечить попадание в поле зрения любой видеокамеры 24 не менее четырех координатных маркеров, изображения которых позволяют образовать не менее одного четырехугольника. Примеры таких условий наблюдения демонстрируют фиг. 4 и 6, на которых в координатное поле 5 регистрируемого видеокамерой 24 изображения (сигнала) попадают, соответственно, шесть и одиннадцать координатных маркеров 4. Дополнительно для этих условий, форму, размеры, цвета и асимметричность расположения координатных маркеров выбирают так, чтобы обеспечить их идентификацию в наборе 25. Выбираемое количество координатных маркеров в наборе 25 зависит от требований по возможным углам свала оружия (углам поворота регистрируемых изображений) при прицеливании по наихудшим положениям целей по углам экрана 18 и всегда может быть обеспечено корректным выбором фокусного расстояния объективов видеокамер 24. Характеристики асимметрии размещения координатных маркеров, формы, размера и цвета, описываемые выражениями (3), (2) и (1), образуют единый для всех регистрируемых сигналов изображений вектор Пm с компонентами Пmk (4), который имеет достаточное число степеней свободы для обеспечения идентификации координатных маркеров в требуемых диапазонах изменений углов возвышения, упреждения и свала имитаторов оружия, ракурсов и расстояний наблюдения изображений обучаемыми стрелками. Выбором сочетаний характеристик (1-3) координатных маркеров можно всегда обеспечить их идентификацию в наборе 25. Например, выбор двенадцати маркеров 4 в составе набора, с асимметрией размещения по фиг. 3, круглой формы и с одинаковыми цветами обеспечивает идентификацию изображений (сигналов) четырех и более соседних маркеров при углах поворота изображений от 0 до 360 градусов, ракурсах наблюдения плюс-минус 60 градусов и изменениях масштаба в 3 раза. При этом размеры координатного поля регистрируемых изображений (сигналов) 5 фиг. 6, определяемых фокусным расстоянием объективов видеокамер 24 фиг. 13, должны быть выбраны больше размеров изображения фоноцелевой обстановки 9 фиг. 6 (или экрана 18 фиг. 13) до 20% по горизонтали и до 100% по вертикали для реалистичных сценариев стрельб, скоростей движения, дальностей и типов имитируемых целей. Разрешающая способность видеокамер 24 при таких условиях должна быть выбрана, как правило, в 2 раза выше четкости формируемых изображений.
В наборе 25 координатных маркеров фиг. 13 могут применяться, например, светодиодные сборки DLA/61D компании Kingbright с длиной волны излучения 625 нм, шириной диаграммы направленности 120 градусов и током потребления 180 мА. В качестве регулятора 26 - управляемый источник тока на 3 А с компьютерным интерфейсом дистанционного управления, например в стандарте RS-232 или RS422/485. Видеокамеры 24, используемые в устройстве, могут быть типов UI-5490SE-C-HQ компании IDSGmbH с максимальным разрешением 3840×2748 пикселей, интерфейсами GigE и 6WI/O, диапазоном спектральной чувствительности до 900 нм. Видеопроектор 22 фиг. 13 - XG-P10XE компании Sharp с разрешением 1024×768 пикселей и проекционным экраном 18 размерами 285×210 см. Вычислительная система 19 может быть сконфигурирована на основе типовых архитектур, известных и доступных компонентов. Например, в виде одного гибридного сервера NVIDEA TESLA HPC-8080 компании Forsite с платформой центрального процессора до четырех Intel XeonE5-2699v3 по восемнадцать ядер в каждом, оперативной памятью до 1,5 терабайт, скоростными SSD дисками долговременной памяти до 2,4 терабайт и SAS накопителями до 6,0 терабайт. Сервер комплектуют графическими ускорителями NVIDEA TESLA K80M (Kepler) с архитектурой параллельных вычислений CUDA и производительностью до 8,7 терафлопс в количестве до 8 единиц и платами видеозахвата DeckLinc 4K Extreme 12G на два видеопотока форматом 4096×2160 р60 в количестве до 8 единиц. Оцениваемая производительность такой вычислительной системы в несколько раз превосходит потребную для обработки в реальном времени суммарного потока данных в 360 гигабит в секунду в устройстве с шестнадцатью имитаторами оружия по алгоритмам реализуемых способов определения точек наведения оружия.
Устройство работает следующим образом.
После размещения в месте установки и включения устройство определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах фиг. 13 переходит в режим настройки. Вычислительная система 19 формирует последовательность кадров тестового сигнала с цветовыми компонентами, содержащего сигналы тестовых маркеров с заданными программно координатами. Видеопроектор 22 преобразует каждый кадр этого сигнала в тестовое изображение на плоском экране 18, которое вместе с включенными излучателями набора 25 координатных маркеров имеет вид, пример которого показан на фиг. 1. Видеокамеры 24 имитаторов 23 оружия преобразуют изображения с экрана 18 и его окрестностей, поле координат 5 фиг. 1, в двумерные регистрируемые тестовые сигналы, центральный элемент каждого из которых совпадает с осью системы координат xpOpyp и сопряжен с осью ствола соответствующего имитатора 23 оружия. Затем производят подстройку координатных полей тестового изображения и регистрируемого тестового сигнала совмещением оси координатной системы 6 фиг. 1 прицела каждого имитатора 23 оружия фиг. 13 с осью системы координат xpOpyp соответствующего регистрируемого сигнала электронными регулировками камеры 24 и регулировкой ее механического крепления к имитатору 23, подстройкой положения тестового изображения 1, координатного поля xOy и относительного расположения поля 3 координатных маркеров фиг. 1 электрическими регулировками видеопроектора 22 и регулировками механического крепления видеопроектора 22, экрана 18 и набора 25 координатных маркеров фиг. 13.
Для исключения аппаратных искажений цветности координатных маркеров 25 фиг. 13 вследствие ограничений динамического диапазона освещенностей в видеокамерах 24 регулятором 26 производят подстройку питающего тока излучателей. Для этого поле зрения любой видеокамеры 24 ориентируют в пространстве так, чтобы наблюдать изображения координатных маркеров на мониторе 20. С вычислительной системы 19 программно либо устройствами 21 управления задают максимальный ток и пошагово снижают его до появления заданного оттенка изображений координатных маркеров, в рассматриваемом примере - красного (из-за насыщения в усилителях видеокамер изначально цвет маркеров будет белым). Окончательно устанавливают силу тока регулятора 26 такой, чтобы размах красной компоненты сигнала изображения маркеров составлял от 50 до 80% максимального, а компоненты векторов нормированных относительных яркостей голубой и зеленой компонент (1) был близок к расчетным значениям Emk=(0,042, 0,142)Т.
Затем по изображению тестового сигнала на экране 18 фиг. 1 измерениями и интерполяцией по тестовым маркерам 2 с точно заданными программно координатами в системе xOy определяют точные координаты координатных маркеров 4, устройством 21 управления фиг. 13 вводят их в вычислительную систему 19 и запоминают в качестве эталонных.
Описанная работа устройства в режиме настройки соответствует осуществлению им первого способа определения точки наведения оружия на изображении фоноцелевой обстановки в соответствии с первым изобретением группы. При осуществлении устройством второго, третьего и четвертого способов его работа в режиме настройки заключается в следующем.
Вычислительная система 19 формирует последовательность кадров тестового сигнала с цветовыми компонентами в виде однотонного поля со встроенными сигналами не менее четырех тестовых маркеров с программно заданными координатами, характеристиками формы, размера и цвета. Видеопроектор 22 преобразует каждый кадр этого сигнала в тестовое изображение на плоском экране 18, которое вместе с аналогично установленными координатными маркерами с отличающимися от тестовых маркеров 2 изображениями имеет вид, пример которого показан на фиг. 5. Видеокамеры 24 имитаторов 23 оружия аналогично преобразуют изображения с экрана 18 и его окрестностей, поле координат 5 фиг. 5, в двумерные регистрируемые тестовые сигналы Btp(xp,yp). Аналогичным образом производят подстройку координатных полей тестового изображения и регистрируемого тестового сигнала для всех имитаторов 23 оружия и видеокамер 24 фиг. 13, подстройку питающего тока излучателей координатных маркеров регулятором 26. Далее ориентируют любой из имитаторов 23 оружия и сопряженное с ними координатное поле регистрируемого тестового сигнала 5 фиг. 5 так, чтобы обеспечить попадание в этот регистрируемый тестовый сигнал изображений всех тестовых маркеров 2 и координатных маркеров 4. Этот сигнал с выбранной видеокамеры 24 фиг. 13 поступает в вычислительную систему 19, записывается в ее буферную память и контролируется по монитору 20. В вычислительной системе 19 в этом регистрируемом тестовом сигнале выделяют сигналы всех l тестовых и k координатных маркеров по заданным характеристикам маркеров (1, 2) и выражениям (5, 6), определяют их наблюдаемые координаты (xнmk,yнmk) и (xнml,yнml), уточняют характеристики Пнmk и Пнml соответственно координатных и тестовых маркеров по выражениям (1-4) и идентифицируют размещение тестовых маркеров в регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам в соответствии с выражением (7). По задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров вычислительная система 19 рассчитывает элементы матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений в соответствии с выражениями (8, 9) аналогично расчету элементов матрицы А. Умножением вектора наблюдаемых координат каждого координатного маркера на обращенную матрицу F получают их координаты в поле xOy сигнала тестового изображения фиг. 5, запоминают в качестве эталонных координат координатных маркеров (xmk,ymk), корректируют по ним характеристики относительного расположения сигналов изображений координатных маркеров dmk и вместе с заданными характеристиками формы, размера и цвета Emk и cmk запоминают их в качестве эталонных характеристик координатных маркеров Пmk, выражение (4).
Устройство определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах в режиме работы при осуществлении способов по первому и второму изобретениям группы работает следующим образом.
Вычислительная система 19 фиг. 13 формирует непрерывную последовательность кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами B(х,y) в координатном поле тестового сигнала xOy. Видеопроектор 22 преобразует этот сигнал в цветное изображение E(х,y) на экране 18, которое вместе с изображениями тех же координатных маркеров Emk(xmk,ymk) преобразуют в соответствующие регистрируемые сигналы фоноцелевой обстановки Bp(xp,ур) видеокамерами 24. Примеры преобразуемого изображения приведены на фиг. 6 и 10. Затем в каждом из этих сигналов выделяют сигналы изображений координатных маркеров Bpmk(xpmk,ypmk), определяют их координаты и характеристики, идентифицируют маркеры по их эталонным и текущим характеристикам в соответствии с выражениями (5, 6, 7) с использованием (1-4), рассчитывают элементы матриц А проективных преобразований для сформированного и каждого регистрируемого изображения фоноцелевой обстановки по выражениям (8, 9) и определяют координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки для каждого имитатора 23 оружия по выражению (10). Эти координаты с требуемыми, запрограммированными кадровыми интервалами отображаются на мониторе 20 и могут подсвечиваться специальными метками на изображении фоноцелевой обстановки на мониторе 20 и экране 18 фиг. 13. При имитации выстрелов по сигналам электрических контактов спусковых крючков имитаторов 23 оружия отображение координат точек наведения оружия "замораживают" на заданный программно интервал, а точки наведения на изображениях подсвечиваются отличительными метками. При этом отдельной подпрограммой вычислительных средств может предусматриваться обработка и запоминание получаемых в каждом кадре координат до имитации выстрелов для каждого имитатора 23 оружия.
При осуществлении третьего способа определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах устройство в режиме работы определяет координаты аналогично. Для определения точных значений координат точек наведения область 10 фиг. 6 каждого двумерного регистрируемого сигнала, поступающего с соответствующей видеокамеры 24, преобразуют в вычислительной системе 19 в соответствующий приведенный сигнал ВП(x,y) области 11 фиг. 7 координатного поля xOy сигнала фоноцелевой обстановки 9 по выражениям (10, 11, 12). В окрестности каждой такой области выделяют область 12 сигнала Ве(x,у), в которой по выражению (13) находят координаты центрального элемента (xO,yO) соответствующей подобласти наибольшего подобия приведенному сигналу ВП(х,y) в сигнале Ве(х,y). Найденные координаты используют в качестве точных координат точек наведения каждого используемого имитатора оружия в сигнале изображения фоноцелевой обстановки, запоминают и обрабатывают в вычислительной системе, подсвечивают и отображают на экране 18 и мониторе 20 фиг. 13.
При осуществлении четвертого изобретения группы элементы устройства в режиме работы выполняют основные действия по формированию, отображению, регистрации, преобразованию и обработке сигналов аналогично описанным. А именно: вычислительная система 19 формирует последовательность кадров двумерного сигнала фоноцелевой обстановки с цветовыми компонентами В(х,y) в координатном поле xOy 1, фиг. 1, видеопроектор 22 преобразует этот сигнал в цветное изображение фоноцелевой обстановки Е(х,y), видеокамеры 24 имитаторов 23 оружия преобразуют это изображение и изображения координатных маркеров в двумерные регистрируемые сигналы фоноцелевой обстановки Bp(xp,ур) и через системы интерфейсов видеокамер 24 передают полученные сигналы на соответствующие входы вычислительной системы. Модули видеозахвата вычислительной системы 19 покадрово вводят регистрируемые сигналы в оперативную память модулей центрального и графических процессоров, в которых производится их дальнейшая обработка. В каждом из введенных регистрируемых сигналов выделяют сигналы изображений координатных маркеров Bpmk(xpmk,ypmk), определяют их координаты и характеристики, идентифицируют их положения в наборе, рассчитывают элементы матриц А проективных преобразований, определяют координаты точек наведения каждого имитатора 23 оружия, преобразуют области 10 сигналов Bp(xp,ур) в соответствующие приведенные сигналы ВП(x,y) в координатном поле сигнала фоноцелевой обстановки xOy, определяют координаты (xO,yO) центральных элементов подобластей наибольшего подобия приведенным сигналам в областях 12 фиг. 7 сигнала фоноцелевой обстановки и используют эти координаты в качестве точных координат точек наведения каждого имитатора 23 оружия в сигнале изображения фоноцелевой обстановки.
Параллельно с описанными действиями в оперативную память вычислительной системы 19 загружают подготовленные на этапе разработки устройства показатели и критерии подобия сигналов изображений в соответствии с выражением (14). Вычислительной системой 19 область сигнала изображения фоноцелевой обстановки 9 фиг. 12 разбивают на области 13 поиска опорных точек, в каждой такой области выделяют центральную подобласть 14, рассчитывают по соотношению в скобках правой части выражения (13) значения автокорреляционной функции, по ним рассчитывают показатели подобия, применяют критерии (14), ранжируют области по наилучшим показателям подобия центральных подобластей по выражению (15), координаты центральных элементов которых принимают за координаты найденных опорных точек 15 фиг. 12 в сигнале изображения фоноцелевой обстановки. Как правило, в операциях с сигналами текущего кадра используют опорные точки, найденные в предыдущем кадре.
Затем для каждого имитатора 23 оружия и найденных опорных точек пересчитывают векторы координат этих опорных точек из поля xOy в системы координат xpOpyp умножением их векторов координат на соответствующую каждому регистрируемому сигнала матрицу А, отбирают те опорные точки, пересчитанные векторы координат которых попадают в координатное поле регистрируемого сигнала, регистрируемый сигнал в окрестностях его центрального элемента и отобранных опорных точек преобразуют в соответствующие им области 11 приведенных сигналов фиг. 12 согласно выражений (10, 11, 12), определяют координаты и показатели подобия подобластей наибольшего подобия полученных приведенных сигналов сигналам областей фоноцелевой обстановки по выражениям (13) и (14), определяют лучшую опорную подобласть наибольшего подобия по показателям подобия согласно выражения (15) и минимальной разности координат этой подобласти и координат найденной по координатным маркерам точки наведения оружия. После этого проверяют принадлежность координат точки 16 наведения оружия фиг. 12 координатному полю сигнала фоноцелевой обстановки 9, сравнивают показатели подобия (15) приведенного сигнала в области найденной точки наведения и приведенного сигнала в области лучшей опорной точки и используют в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки либо координаты центрального элемента подобласти наибольшего подобия в окрестностях найденной точки наведения оружия, если эта подобласть имеет более высокие показатели подобия и ее координаты принадлежат координатному полю сигнала фоноцелевой обстановки 9 фиг. 12, либо координаты центрального элемента подобласти наибольшего подобия лучшей опорной точки, откорректированные на разность координат этой опорной точки и координат найденной точки наведения оружия, в других случаях. Найденные для каждого используемого имитатора 23 оружия координаты используют в качестве точных координат точек наведения в сигнале изображения фоноцелевой обстановки, запоминают и обрабатывают в вычислительной системе 19, подсвечивают и отображают на экране 18 и мониторе 20 фиг. 13.
Таким образом, работа устройства определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах по пятому изобретению группы в режимах настройки и работы обеспечивает осуществление способов по первым четырем изобретениям группы и получение независимых координат точек наведения всех имитаторов 23 оружия.
Достигаемый при осуществлении пятого изобретения группы технический результат в сравнении с наиболее близким аналогом заключается в обеспечении возможности увеличения числа одновременно обучаемых стрелков, повышении точности, независимости и временной стабильности определения координат точек наведения их оружия, повышении эксплуатационных характеристик устройства в части упрощения требований к размещению устройства, настроечным процедурам, снижения ограничений на сценарии индивидуальной и групповой работы подготавливаемых стрелков.
Заявляемые способы и устройство могут быть осуществлены и применены при создании качественно новых тренажерных систем для подготовки и поддержания навыков личного состава силовых ведомств и спортсменов, освоения ими новых видов оружия, тренировки охотников, а также при создании симуляторов для игровых систем индустрии развлечений. Такие возможности подтверждены изготовлением экспериментального образца стрелкового тренажера, параметры и результаты испытаний которого приведены выше в описании осуществления изобретений. Выполненные работы положены в основу технико-экономического обоснования и аванпроекта опытно-конструкторской работы по созданию нового тренажера серии 9Ф700, что в совокупности с изложенными возможностями, по мнению заявителя и авторов, может служить доказательством соответствия изобретений критерию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР "ТЭСТ" | 2016 |
|
RU2640952C2 |
| СПОСОБ ИСПЫТАНИЙ СИСТЕМ ЗАЩИТЫ ОБЪЕКТОВ ОТ ПОРАЖЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2016 |
|
RU2645006C1 |
| СТРЕЛКОВЫЙ ВИДЕОТРЕНАЖЕР | 1997 |
|
RU2132036C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЁР | 2019 |
|
RU2774375C2 |
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| Тренажер для профессиональной подготовки военных специалистов носимых и выносных противотанковых ракетных комплексов (варианты) | 2015 |
|
RU2660796C1 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ ИЛИ СТРЕЛЬБЫ ИЗ ОРУДИЙ И ПУЛЕМЕТОВ | 1999 |
|
RU2179698C2 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
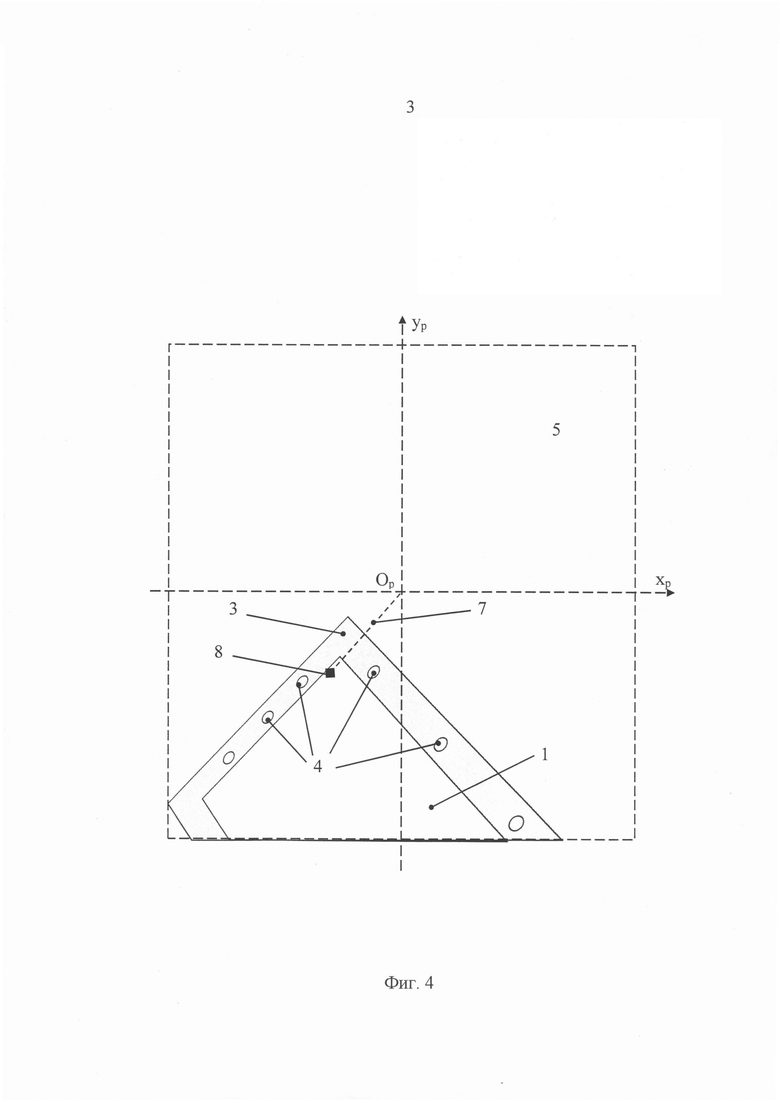
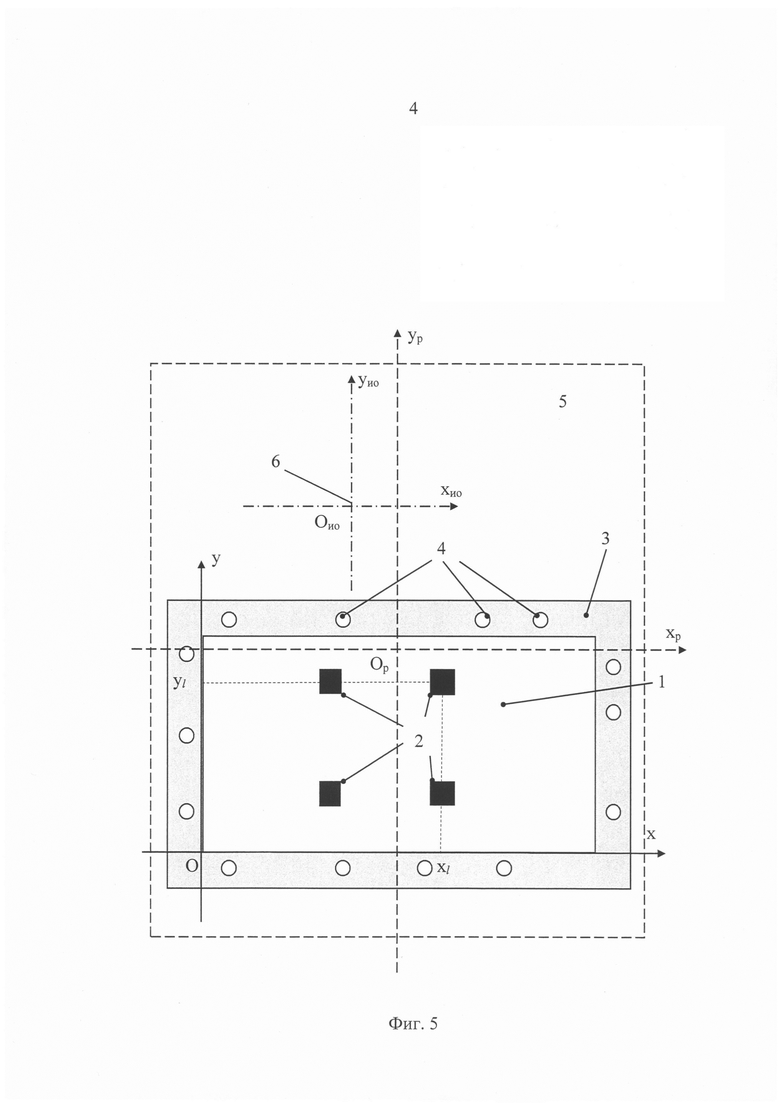
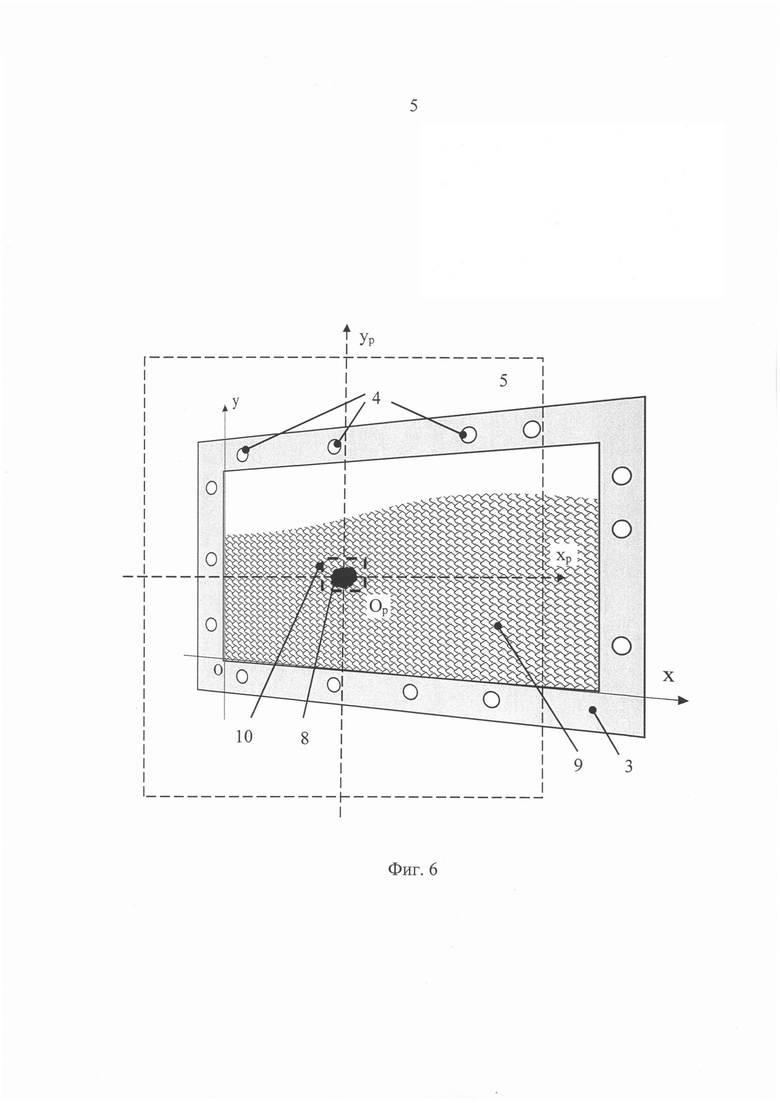
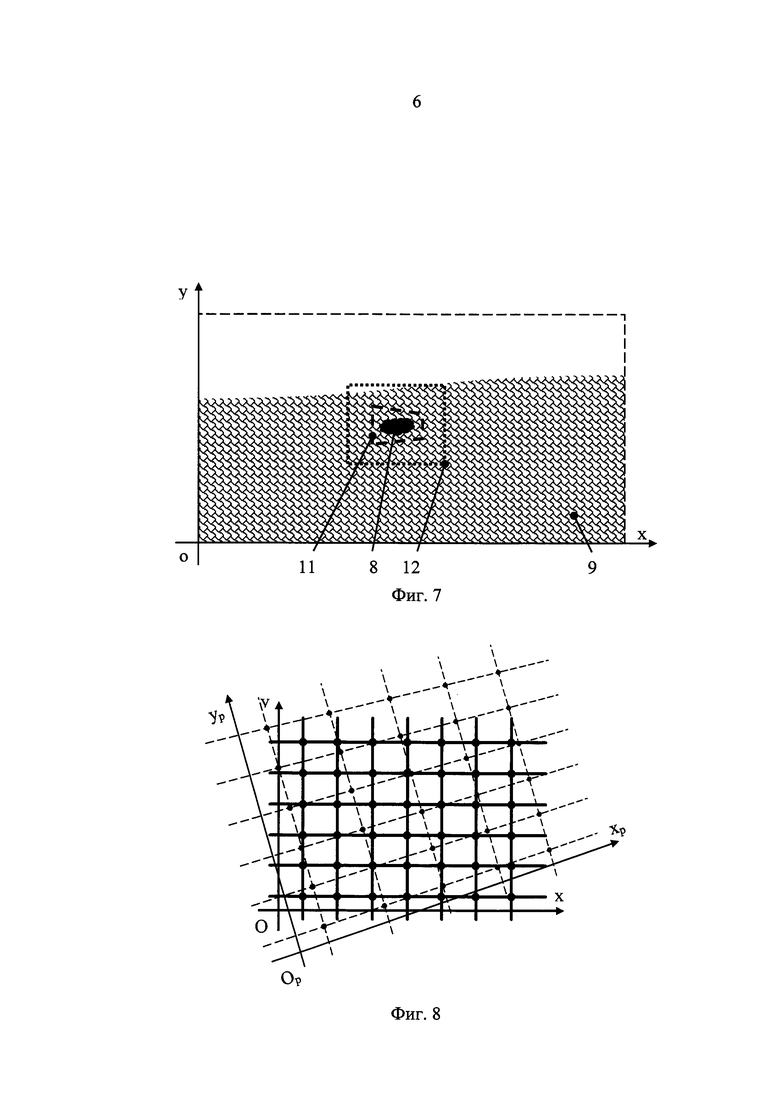
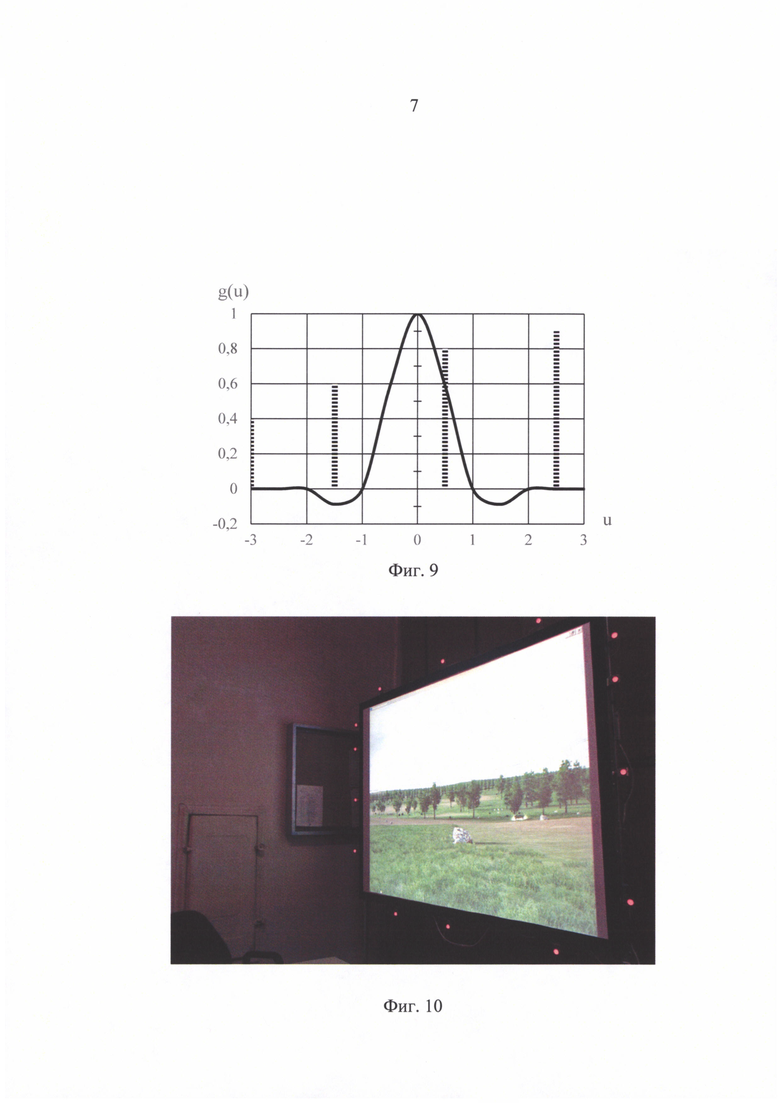
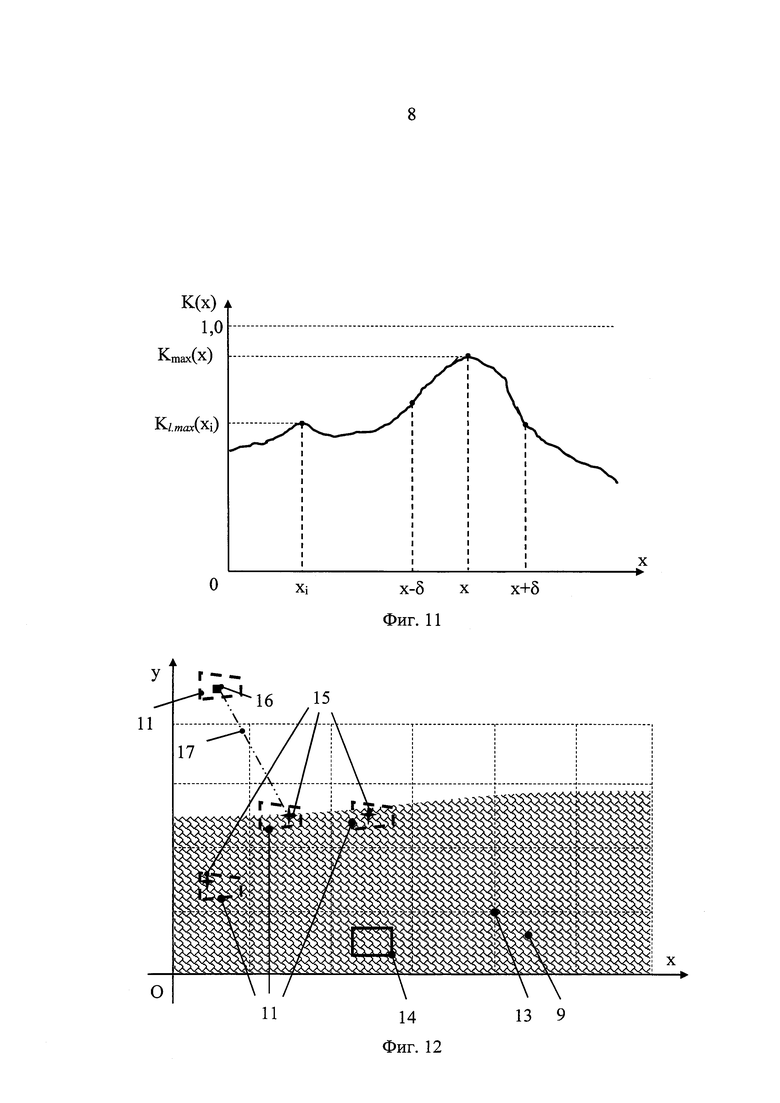
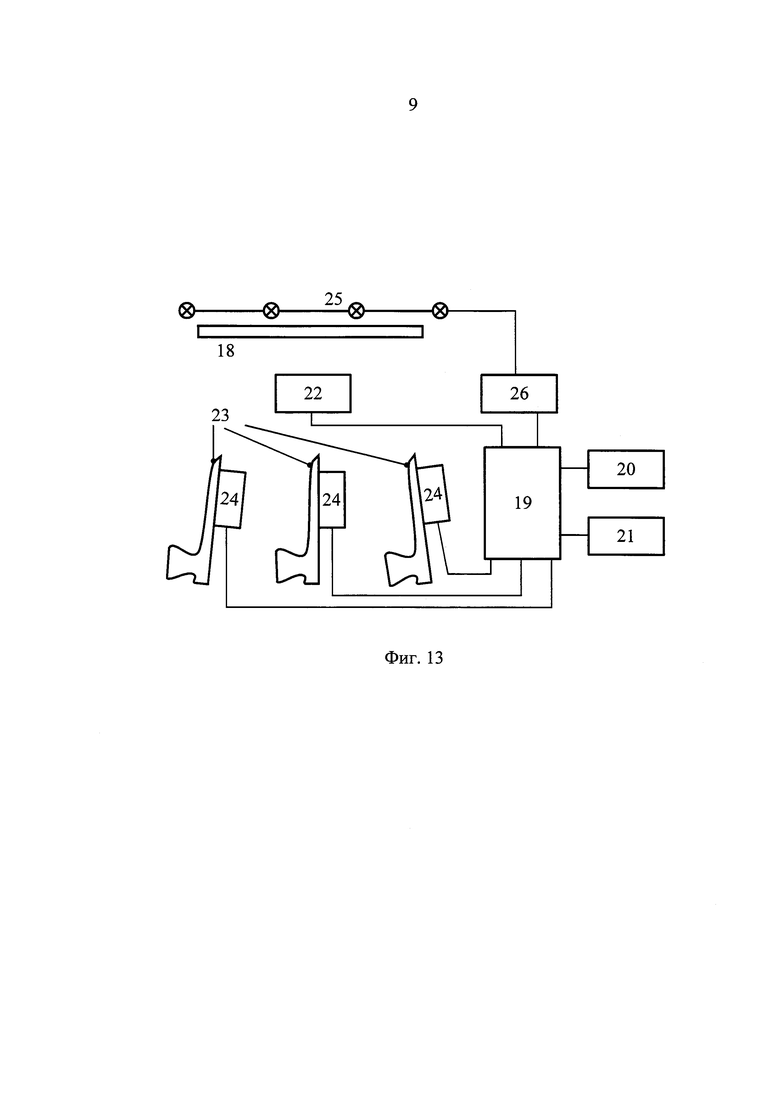
Группа изобретений относится к области учебно-тренировочных средств и может быть использована при создании тренажеров для обучения и тренировок в стрельбе. Способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах отличается тем, что после определения координат точек наведения оружия для каждого регистрируемого сигнала преобразуют область двумерного регистрируемого сигнала в окрестности его центрального элемента в приведенный сигнал в координатном поле сигнала фоноцелевой обстановки, определяют координаты подобласти наибольшего подобия приведенному сигналу в окрестности найденной точки наведения оружия в сигнале фоноцелевой обстановки и используют координаты центрального элемента найденной подобласти в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки. Устройство определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах отличается тем, что в него дополнительно введены имитаторы оружия по количеству одновременно обучаемых стрелков, такое же количество видеокамер с системами регулирования и интерфейса, закрепленные на соответствующих имитаторах оружия, набор координатных маркеров и регулятор, вход которого подключен к выходу управления вычислительной системы, выход регулятора подключен к излучающим элементам набора координатных маркеров, а выходы дополнительных видеокамер соединены с соответствующими входами видеоинтерфейса вычислительной системы. Технический результат заключается в обеспечении возможности увеличения числа стрелков, повышении точности, независимости и временной стабильности определения координат точек наведения имитаторов их оружия. 5 н. и 6 з.п. ф-лы, 13 ил.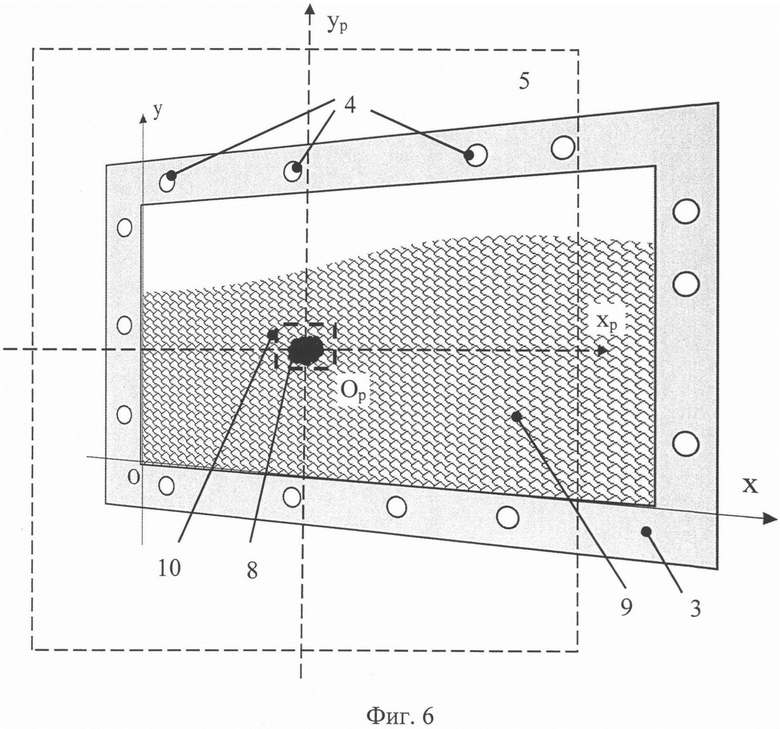
1. Способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающий формирование вычислительными средствами в режиме настройки последовательности кадров двумерного тестового сигнала, содержащего сигналы тестовых маркеров с задаваемыми координатами, покадровое преобразование видеопроектором тестового сигнала в тестовое изображение на плоском экране, наложение на тестовое изображение изображений координатных маркеров, преобразование посредством видеокамеры изображения с экрана и его окрестностей в двумерный регистрируемый тестовый сигнал, центральный элемент которого сопряжен с осью ствола имитатора оружия, подстройку координатных полей тестового изображения и регистрируемого тестового сигнала, определение и запоминание координат координатных маркеров относительно поля сигнала тестового изображения в качестве эталонных, формирование в рабочем режиме вычислительными средствами непрерывной последовательности кадров двумерного сигнала фоноцелевой обстановки в координатном поле тестового сигнала, покадровое преобразование полученного сигнала в изображение фоноцелевой обстановки на плоском экране, наложение на полученное изображение изображений тех же координатных маркеров, преобразование изображения с экрана и его окрестностей в двумерный регистрируемый сигнал, определение текущих координат изображений координатных маркеров в регистрируемом сигнале и определение координат точки наведения оружия на изображении фоноцелевой обстановки, отличающийся тем, что дополнительно вводят в элементы всех сигналов и изображений компоненты, описывающие цветовые оттенки этих элементов в базовых цветах, выбирают количество координатных маркеров не менее четырех, определяют характеристики формы, размера, цвета и относительного расположения сигналов изображений координатных маркеров и запоминают их в качестве эталонных характеристик, в регистрируемом сигнале выделяют сигналы координатных маркеров и определяют их текущие характеристики, идентифицируют в регистрируемом сигнале размещение координатных маркеров по их эталонным и текущим характеристикам, рассчитывают элементы матрицы А проективных преобразований сформированного и регистрируемого изображений фоноцелевой обстановки по текущим и эталонным координатам не менее четырех идентифицированных маркеров, а координаты точки наведения оружия в сигнале изображения фоноцелевой обстановки определяют умножением вектора координат центрального элемента регистрируемого сигнала на обращенную матрицу А, причем преобразование изображений с экрана и его окрестностей в регистрируемые сигналы, а также все последующие действия с этими сигналами и зависящие от них, выполняют аналогично для каждого используемого имитатора оружия с сопряженной с ним отдельной видеокамерой.
2. Способ определения точки наведения по п. 1, отличающийся тем, что количество и размещение изображений координатных маркеров в области экрана и размеры координатного поля регистрируемого и регистрируемого тестового сигналов выбирают так, чтобы в заданных диапазонах углов возвышения, упреждения и свала имитатора оружия и для любых координат целей в сигнале фоноцелевой обстановки обеспечить попадание в регистрируемые сигналы сигналов не менее четырех координатных маркеров, координаты которых позволяют образовать в координатном поле не менее одного четырехугольника.
3. Способ определения точки наведения по п. 1, отличающийся тем, что характеристики формы, размера, цвета и относительного расположения координатных маркеров выбирают так, чтобы их компоненты, сочетания и производные параметры обеспечили выделение и идентификацию сигналов координатных маркеров в регистрируемом и регистрируемом тестовом сигналах.
4. Способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающий совокупность признаков по п. 1, отличающийся тем, что выбирают формируемый двумерный тестовый сигнал в виде однотонного поля, выбирают количество встраиваемых в этот сигнал тестовых маркеров с задаваемыми координатами не менее четырех, задают характеристики формы, размера, цвета и относительного расположения тестовых маркеров, задают координаты и характеристики координатных маркеров, отличающиеся от координат и характеристик тестовых маркеров, ориентируют любой из имитаторов оружия и сопряженное с ним координатное поле регистрируемого тестового сигнала так, чтобы обеспечить попадание в этот регистрируемый тестовый сигнал изображений всех тестовых и координатных маркеров, выделяют в регистрируемом тестовом сигнале сигналы тестовых и координатных маркеров, определяют наблюдаемые координаты и характеристики этих маркеров, идентифицируют размещение тестовых маркеров в регистрируемом тестовом сигнале по их наблюдаемым и задаваемым характеристикам, рассчитывают элементы матрицы F проективных преобразований сформированного и регистрируемого тестовых изображений по задаваемым и наблюдаемым координатам сигналов не менее четырех идентифицированных тестовых маркеров, определяют координаты каждого координатного маркера относительно поля сигнала тестового изображения умножением вектора наблюдаемых координат соответствующего координатного маркера на обращенную матрицу F и запоминают их в качестве эталонных координат координатных маркеров, корректируют характеристики относительного расположения сигналов изображений координатных маркеров по соответствующим эталонным координатам и вместе с заданными характеристиками формы, размера и цвета запоминают их в качестве эталонных характеристик координатных маркеров.
5. Способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающий совокупность признаков по п. 4, отличающийся тем, что после определения координат точек наведения оружия для каждого регистрируемого сигнала преобразуют область двумерного регистрируемого сигнала в окрестности его центрального элемента в приведенный сигнал в координатном поле сигнала фоноцелевой обстановки, определяют координаты подобласти наибольшего подобия приведенному сигналу в окрестности найденной точки наведения оружия в сигнале фоноцелевой обстановки и используют координаты центрального элемента найденной подобласти в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки.
6. Способ определения точки наведения по п. 5, отличающийся тем, что векторы координат элементов приведенного сигнала получают умножением вектора координат каждого соответствующего элемента регистрируемого сигнала на обращенную матрицу А, а значения каждой цветовой компоненты каждого элемента приведенного сигнала в узлах координатного поля сигнала фоноцелевой обстановки получают интерполяцией значений соответствующих компонентов близлежащих элементов регистрируемого сигнала.
7. Способ определения точки наведения по п. 5, отличающийся тем, что размеры преобразуемой области регистрируемого сигнала задают такими, чтобы обеспечить более широкие диапазоны допустимых погрешностей преобразований сигналов и искажений координатных полей изображений для устойчивого определения подобласти наибольшего подобия в сигнале фоноцелевой обстановки, а размеры области поиска подобласти наибольшего подобия по каждой оси координат ограничивают для обеспечения однозначности определения такой подобласти.
8. Способ определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающий совокупность признаков по п. 5, отличающийся тем, что в каждом кадре после формирования двумерного сигнала фоноцелевой обстановки дополнительно задают показатели и критерии подобия сигналов изображений, проводят поиск и определяют координаты нескольких опорных точек с наилучшими показателями подобия подобластей сигнала фоноцелевой обстановки в окружающих областях этого же сигнала, для каждого имитатора оружия при определении подобласти наибольшего подобия приведенному сигналу в окрестностях найденной точки наведения оружия определяют также показатели подобия этой подобласти, для найденных опорных точек умножением векторов их координат на матрицу А рассчитывают векторы координат этих опорных точек в регистрируемом сигнале, из числа опорных точек отбирают те, рассчитанные векторы координат которых попадают в координатное поле регистрируемого сигнала, преобразуют аналогичным образом в приведенные сигналы областей регистрируемого сигнала в окрестностях отобранных опорных точек, определяют координаты и показатели подобия подобластей наибольшего подобия приведенным сигналам в окрестностях отобранных опорных точек в сигнале фоноцелевой обстановки, определяют лучшую опорную подобласть наибольшего подобия по показателям подобия и минимальной разности координат этой подобласти и координат найденной точки наведения оружия, а в качестве точных координат точки наведения оружия в сигнале изображения фоноцелевой обстановки используют либо координаты центрального элемента подобласти наибольшего подобия в окрестностях найденной точки наведения оружия, если эта подобласть имеет более высокие показатели подобия и ее координаты принадлежат координатному полю сигнала фоноцелевой обстановки, либо координаты центрального элемента подобласти наибольшего подобия лучшей опорной точки, откорректированные на разность координат этой опорной точки и координат найденной точки наведения оружия, в других случаях.
9. Устройство определения точки наведения оружия на изображении фоноцелевой обстановки в стрелковых тренажерах, включающее экран, вычислительную систему, подключенный к ее первому видеовыходу монитор, устройства управления, подключенные ко входу управления вычислительной системы, видеопроектор с системой регулирования, подключенный ко второму видеовыходу вычислительной системы, имитатор оружия и закрепленную на нем видеокамеру с системами регулирования и интерфейса, выход которой соединен со входом видеоинтерфейса вычислительной системы, отличающееся тем, что в него дополнительно введены имитаторы оружия по количеству одновременно обучаемых стрелков, такое же количество видеокамер с системами регулирования и интерфейса, закрепленные на соответствующих имитаторах оружия, набор координатных маркеров и регулятор, вход которого подключен к выходу управления вычислительной системы, выход регулятора подключен к излучающим элементам набора координатных маркеров, а выходы дополнительных видеокамер соединены с соответствующими входами видеоинтерфейса вычислительной системы.
10. Устройство определения точки наведения оружия по п. 9, отличающееся тем, что вычислительная система, монитор, видеопроектор и видеокамеры выполнены таким образом, что они формируют, отображают и регистрируют цветные сигналы и изображения в единой цветовой системе координат, координатные маркеры расположены в одной плоскости с экраном, вблизи внешних границ проецируемых на него изображений, количество координатных маркеров в наборе и их размещение выбраны так, что в заданных диапазонах углов возвышения, упреждения и свала имитаторов оружия и для любых положений изображений целей на экране обеспечивают попадание в поле зрения любой видеокамеры не менее четырех координатных маркеров, изображения которых позволяют образовать не менее одного четырехугольника.
11. Устройство определения точки наведения оружия по п. 9, отличающееся тем, что каждый координатный маркер из набора выполнен в виде монохромного излучателя видимых или невидимых световых волн с регулируемой интенсивностью и установлен так, что его диаграмма направленности охватывает места размещения стрелков с имитаторами оружия перед экраном, диапазон световой чувствительности видеокамер выбран так, что он охватывает длины волн излучателей координатных маркеров, а выбранные форма, размеры, цвета и асимметричность расположения координатных маркеров обеспечивают их идентификацию в наборе при наблюдении не менее четырех таких маркеров.
| СТРЕЛКОВЫЙ ТРЕНАЖЕР С ОПТИКО-ЭЛЕКТРОННЫМ РЕГИСТРИРУЮЩИМ УСТРОЙСТВОМ | 1999 |
|
RU2168145C2 |
| SU 1136582 A1, 10.10.1995 | |||
| US 6966775 B1, 22.11.2005 | |||
| US 4521196 A, 04.06.1985. | |||

