Изобретение относится к радиолокации, конкретно к способам опознавания целей в групповой цели, состоящей из боеголовок (БГ) и ложных целей (ЛЦ), с помощью двух традиционных радиолокационных однопозиционных станций (РЛС) по одновременно измеренным амплитудным диаграммам отраженных сигналов или выборкам из них.
Известен способ распознавания воздушных ложных целей при двухпозиционном зондировании (патент РФ №2225624 на изобретение) по измеренным динамическим РЛХ целей, заключающийся в том, что с помощью основной радиолокационной станции - РЛС1 излучают импульсные сигналы в направлении цели, принимают в течение интервала времени Δt отраженные от цели сигналы, по которым определяют радиолокационные координаты цели. За время Δt запоминают амплитуды импульсных сигналов и точное время прихода каждого отраженного импульсного сигнала. Создают двумерный массив данных M1, элементами которого являются значения амплитуд и точного времени прихода каждого отраженного импульса сигнала. Задаются определенным уровнем изменения амплитуды отраженного сигнала, для нахождения интервала времени, в течение которого амплитуда U отраженного сигнала изменится на величину ΔU. Из массива M1 выбирают элемент с номером n, содержащий максимальное значение амплитуды, которое принимают за начало отсчета. Последовательно изменяют номер элемента на единицу и находят номер k такого элемента массива, в котором записана амплитуда, отличающаяся от Un с номером n на величину ΔU. Вычисляют величину изменения ракурса локации ΔY, приводящую к изменению амплитуды на ΔU. Вычисленную величину изменения ракурса ΔY сравнивают с пороговым значением Yпор, и в случае превышения величиной ΔY порогового значения Yпор принимают решение о наличии ЛЦ, в противном случае принимают предварительное решение о наличии реальной цели. Одновременно с излучением основной РЛС1 используют излучение дополнительной РЛС2, синхронизованной по времени с РЛС1. По данным, полученным с РЛС2, принимают предварительное решение о наличии или отсутствии ЛЦ. Для принятия окончательного решения производят сравнение амплитуд отраженных сигналов, полученных с двух разнесенных РЛС. При различии амплитуд отраженных сигналов на двух РЛС принимается окончательное решение о наличии ЛЦ.
Способ распознавание целей не может быть применен для опознавания БГ и ЛЦ в боевом порядке групповой цели, состоящей из нескольких БГ и ЛЦ.
Общие признаки аналога и изобретения - облучение целей сигналами двух РЛС и измерение динамических радиолокационных характеристик (РЛХ) - амплитуд отраженных от целей сигналов.
Известен способ распознавания воздушных ложных целей при двухпозиционном зондировании (патент РФ на изобретение №2348053), принятый за прототип изобретения, по измеренным динамическим РЛХ целей, заключающийся в том, что с помощью основной РЛС1 излучают импульсные сигналы в направлении воздушной цели, синхронизированной по времени с дополнительной РЛС2 когерентно-импульсной радиолокационной станцией, которые имеют одинаковые периоды повторения. С помощью РЛС1 и РЛС2 принимают в течение интервала времени Δt отраженные от цели сигналы. За время Δt запоминают амплитуды импульсных сигналов и точное время прихода каждого отраженного импульсного сигнала. Создают два двумерных массива данных M1 и М2, элементами которых являются значения амплитуд и точного времени прихода каждого отраженного импульса. Задаются определенным уровнем изменения амплитуды отраженного сигнала, для нахождения интервала времени, в течение которого амплитуда отраженного сигнала изменится на величину ΔU. Из массивов M1 и М2 выбирают элементы с номерами n, содержащие максимальные значения амплитуд, которые принимают за начало отсчета. В качестве фактора изменения ракурса локации цели принимают случайные рысканья ее планера в полете в турбулентной атмосфере, выбирают интервал времени больше времени формирования лепестка диаграммы отражения. На первом этапе распознавании цели найденные интервал времени сравнивают с пороговым значением и, в случае превышения его величины, принимают предварительное решение о наличии ЛЦ, на втором этапе распознавания, после заполнения параметрами отраженных сигналов массивов M1 и М2, принимают окончательное решение о наличии цели по средним значениям сигналов в массивах.
Способ распознавания целей не может быть применен для опознавания БГ и ЛЦ в боевом порядке групповой цели, состоящей из нескольких БГ и ЛЦ.
Общие признаки прототипа и изобретения - облучение целей сигналами двух РЛС и измерение динамических РЛХ - амплитуд отраженных от целей сигналов.
Технический результат изобретения - опознание БГ и ЛЦ в групповой цели, состоящей из нескольких БГ и ЛЦ.
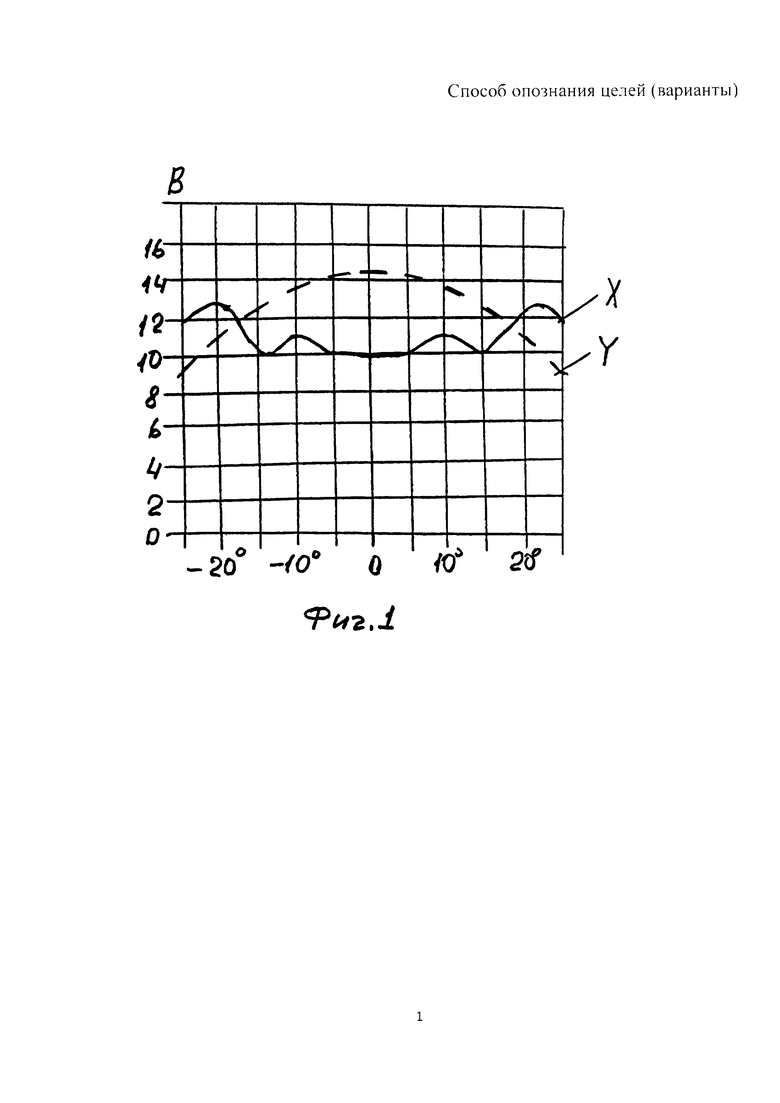
Изобретение поясняется фиг. 1.
На фиг. 1 представлены графики амплитудных диаграмм отраженных сигналов от БГ (сплошная кривая) и ЛЦ (пунктирная кривая) при углах визирования с носа ±25°.
Предпосылки изобретения, известные факты
Отношение средних значений амплитуд сигналов, отраженных от боеголовки и ложной цели, представленных на диаграммах фиг.1, равно 0,83 (10,8/13), разница потенциалов двух традиционных РЛС значительно больше, что свидетельствует о малой вероятности опознания БГ и ЛЦ по амплитудам отраженных сигналов.
Коэффициент корреляции амплитуд отраженных сигналов от двух одинаковых ложных целей в статике равен единице. В динамике, на траектории полета ложные цели движутся вокруг центра масс одинаково, поэтому и в этом случае их коэффициент корреляции амплитуд отраженных сигналов будет равен единице.
Коэффициент корреляции амплитуд сигналов, отраженных от боеголовки и ложной цели, мал, т.к. они не могут быть изготовлены идентичными и их движения вокруг центра масс на траектории полета разные, поэтому вероятность их опознания мала. Этот факт подтверждается диаграммами амплитуд отраженных от БГ и ЛЦ сигналов, представленных на фиг. 1, коэффициент корреляции сигналов, отраженных от БГ и ЛЦ, даже в статике равен нулю.
Коэффициент корреляции амплитуд сигналов, отраженных от двух боеголовок, равен единице, боеголовки идентичны и движутся одинаково вокруг центра масс на траектории полета. Однако вероятность их одновременного измерения чрезвычайно мала и рассчитывается по сочетаниям S из М по L:
S=M!/L!(L-М)!,
где L - общее количество боеголовок и ложных целей в группе целей;
М - количество одновременно обнаруживаемых боеголовок в группе целей.
Так, например, в группе целей, состоящей из двух боеголовок (М=2) и 6 ложных целей (L=8), вероятность их одновременного обнаружения равна S=1/14500000, практически равна нулю.
На траектории БГ прецессирует, совершает движение вокруг оси прецессии, при которой она описывает круговую коническую поверхность с углом при вершине в пределах ±(20°÷30°), поэтому амплитудные диаграммы отраженных сигналов от целей в переднем секторе углов должны измеряться в пределах не меньше этого угла.
Первый вариант исполнения изобретения
Способ опознания целей в группе целей, состоящей из боеголовок и ложных целей, состоит в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают на ЭВМ для каждой измеренной пары целей коэффициент корреляции K(Xi,Yi) отраженных сигналов от целей в паре по формуле:

где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения целей в паре опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
Σ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах.
При этом рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении в пределах 0,85±0,15 первая и вторая цели ложные, т.к. они идентичны и на траектории полета движутся вокруг центра масс одинаково.
После чего измеряют амплитудные диаграммы второй пары целей, состоящей из опознанной ложной цели и неопознанной третьей цели. Рассчитывают коэффициент корреляции КЛ,3 сигналов, отраженных от ложной и третьей целей второй пары. При значении КЛ,3 меньше 0,2 третья цель - первая боеголовка, т.к. боеголовка и ложная цель не могут быть изготовлены идентичными и их движения на траектории полета относительно центра масс разные.
После чего аналогично производят измерение других пар целей, составленных из опознанной ложной цели и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе.
Технический результат изобретения достигнут, опознаны боеголовки и ложные цели в группе целей, состоящей из нескольких боеголовок и ложных целей.
Второй вариант исполнения изобретения
Способ опознания целей в группе целей, состоящей из боеголовок и ложных целей, состоит в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают для каждой измеренной пары целей коэффициент корреляции К(Xi,Yi) отраженных сигналов от целей в паре по формуле:
где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения пары опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
Σ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах.
При этом рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении меньше 0,2 цели в паре не опознаны, но одна из них боеголовка, а другая ложная цель.
Для опознания боеголовки измеряют амплитудные диаграммы второй пары целей, состоящей из первой измеренной цели и неопознанной N-й цели, при которой значение коэффициента корреляции КN,2 находится в пределах 0,85±0,15 и соответствует ложным целями.
После чего измеряют N+1-ю пару целей, состоящую из опознанной ложной цели и одной из неопознанных целей, и рассчитывают их коэффициент корреляции KЛ,(N+1) отраженных сигналов от N+1-й пары целей, при его значении меньше 0,2 N+1 цель - вторая боеголовка.
Аналогично производят измерение других пар целей, составленных из опознанной ложной и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе целей.
Технический результат изобретения достигнут, опознаны боеголовки и ложные цели в групповой цели, состоящей из нескольких боеголовок и ложных целей.
Отличительные признаки формулы изобретения по первому варианту исполнения изобретения
Опознания целей в группе целей, состоящей из боеголовок и ложных целей, состоит в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают для каждой измеренной пары целей коэффициент корреляции К(Xi,Yi) отраженных сигналов от целей в паре по формуле:

где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения целей в паре опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
Σ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах.
Рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении в пределах 0,85±0,15 первая и вторая цели ложные. После чего измеряют амплитудные диаграммы второй пары целей, состоящей из опознанной ложной цели и неопознанной третьей цели. Рассчитывают коэффициент корреляции КЛ,3 сигналов, отраженных от ложной и третьей целей второй пары. При значении КЛ,3 меньше 0,2 третья цель - первая боеголовка.
После чего аналогично производят измерение других пар целей, составленных из опознанной ложной цели и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе.
Отличительные признаки формулы изобретения по второму варианту исполнения изобретения
Опознания целей в группе целей, состоящей из боеголовок и ложных целей, состоит в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают для каждой измеренной пары целей коэффициент корреляции К(Xi,Yi) отраженных сигналов от целей в паре по формуле:

где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения целей в паре опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
Σ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах,
Рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении меньше 0,2 цели в паре не опознаны, в паре находятся боеголовка и ложная цель.
После чего измеряют амплитудные диаграммы второй пары целей, состоящей из первой измеренной цели и неопознанной N-й цели, при измерении которой значение коэффициента корреляции КN,2 находится в пределах 0,85±0,15, эти цели ложные.
После чего измеряют N+1-ю пару целей, состоящую из опознанной ложной цели и одной из неопознанных целей, и рассчитывают их коэффициент корреляции КЛ,(N+1) отраженных сигналов от N+1-й пары целей и при его значении меньше 0,2 N+1-я цель - вторая боеголовка.
Аналогично производят измерение других пар целей, составленных из опознанной ложной и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ идентификации радиолокационных целей (варианты) | 2016 |
|
RU2611720C1 |
| Ложная цель | 2016 |
|
RU2637638C2 |
| СПОСОБ АТТЕСТАЦИИ АМПЛИТУДНОГО И ФАЗОВОГО РАСПРЕДЕЛЕНИЙ ПОЛЯ | 2008 |
|
RU2363007C1 |
| АНТЕННА ПОЛИГОНА ДЛЯ ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННЫХ ХАРАКТЕРИСТИК ЦЕЛЕЙ В ЗОНЕ ФРЕНЕЛЯ | 2015 |
|
RU2599901C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАТРИЦЫ РАССЕЯНИЯ | 2013 |
|
RU2533298C1 |
| Ложная цель | 2016 |
|
RU2612350C1 |
| Ложная цель | 2016 |
|
RU2622783C1 |
| Установка для измерения эффективной поверхности рассеяния радиолокационных целей в дальней зоне антенны | 2016 |
|
RU2623178C1 |
| ОДНОАНТЕННЫЙ ИЗМЕРИТЕЛЬ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ | 2007 |
|
RU2352952C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗНОСА РЕБОРДЫ ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2116214C1 |
Изобретение относится к радиолокации и может быть использовано для опознавания целей в группе целей. Достигаемый технический результат - опознавание цели в группе целей, состоящей из нескольких боеголовок и ложных целей. Указанный результат достигается за счет того, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизированных по времени измерения, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования не меньше 20°-30°, и рассчитывают в каждой паре целей коэффициенты корреляции пар отраженных от них сигналов. При значении коэффициента корреляции К1,2 отраженных от первой и второй целей сигналов первой пары в пределах 0,85±0,15 считают, что опознаны две ложные цели. После этого измеряют амплитудные диаграммы второй пары целей, состоящей из опознанной ложной цели и неопознанной третьей цели. При значении коэффициента корреляции КЛ,3 меньше 0,5 считают, что третья цель - опознанная боеголовка. Аналогично производят измерение других пар целей, составленных из опознанной ложной цели и еще неопознанной, до тех пор, пока не будут попарно измерены и опознаны все цели в группе целей. 2 н.п. ф-лы, 1 ил.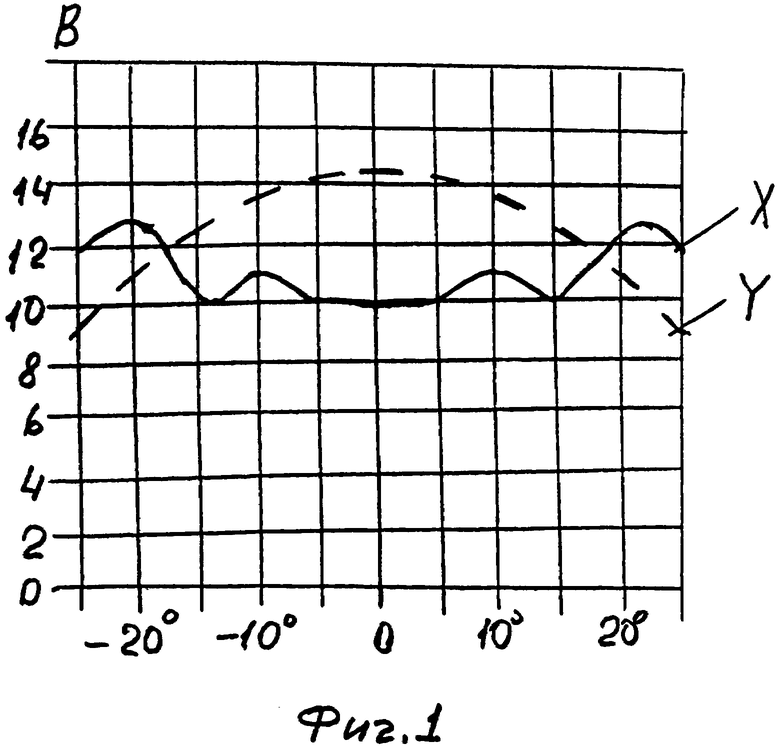
1. Способ опознания целей в группе целей, состоящей из боеголовок и ложных целей, заключающийся в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают для каждой измеренной пары целей коэффициент корреляции К(Xi,Yi) отраженных сигналов от целей в паре по формуле:

где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения целей в паре опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
∑ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах,
при этом рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении в пределах 0,85±0,15 первая и вторая цели ложные, после чего измеряют амплитудные диаграммы второй пары целей, состоящей из опознанной ложной цели и неопознанной третьей цели, рассчитывают коэффициент корреляции КЛ,3 сигналов, отраженных от ложной и третьей целей второй пары, при его значении меньше 0,2 третья цель - первая боеголовка, после чего аналогично производят измерение других пар целей, составленных из опознанной ложной цели и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе.
2. Способ опознания целей в группе целей, состоящей из боеголовок и ложных целей, состоит в том, что с помощью двух типовых однопозиционных радиолокационных станций, синхронизованных по времени измерения двух целей, последовательно измеряют амплитудные диаграммы сигналов, отраженных от пар разных целей в группе в одинаковом диапазоне углов визирования с носа целей не меньше ±(20°÷30°), после чего рассчитывают для каждой измеренной пары целей коэффициент корреляции К(Xi,Yi) отраженных сигналов от целей в паре по формуле:

где Xi и Yi - значения амплитуд в диаграммах отражения сигналов в функции одинаковых углов измерения целей в паре опознаваемых целей;
 и
и  - математические ожидания значений амплитудных диаграмм пары измеренных целей;
- математические ожидания значений амплитудных диаграмм пары измеренных целей;
∑ - знак суммы от i=1 до i=n, где n - количество отсчетов значений амплитуд в измеренных диаграммах,
при этом рассчитывают коэффициент корреляции К1,2 отраженных сигналов от первой и второй целей первой пары, при его значении меньше 0,2 цели в паре не опознаны, в паре находятся боеголовка и ложная цель, после чего измеряют амплитудные диаграммы второй пары целей, состоящей из первой измеренной цели и неопознанной N-й цели, при измерении которой значение коэффициента корреляции KN,2 находится в пределах 0,85±0,15, эти цели ложные, после чего измеряют N+1-ю пару целей, состоящую из опознанной ложной цели и одной из неопознанных целей, и рассчитывают их коэффициент корреляции КЛ,(N+1) отраженных сигналов от N+1-й пары целей и при его значении меньше 0,2 N+1-я цель - вторая боеголовка, аналогично производят измерение других пар целей, составленных из опознанной ложной и неопознанной цели, до тех пор, пока не будут попарно измерены и опознаны все цели в группе целей.
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ОТРАЖЕННЫХ ОТ ЦЕЛИ СИГНАЛОВ И СИГНАЛОВ СИНХРОННОЙ ОТВЕТНОЙ ПОМЕХИ (ВАРИАНТЫ) | 2013 |
|
RU2538166C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТРАССЫ ЦЕЛИ И ЛОЖНОЙ ТРАССЫ, ФОРМИРУЕМОЙ СИНХРОННОЙ ОТВЕТНОЙ ПОМЕХОЙ (ВАРИАНТЫ) | 2013 |
|
RU2534754C1 |
| Механизм шарнирно-рычажного антипараллелограмма | 1988 |
|
SU1610150A1 |
| WO 2006133268 A2, 14.12.2006 | |||
| US 7903024 B2, 08.03.2011 | |||
| US 5012252 A, 30.10.1996. | |||

