Область техники, к которой относится изобретение
Настоящая заявка относится к способам и системе уменьшения жесткого хода педали тормоза, который может возникнуть при использовании педали тормоза.
Уровень техники
Тормозные устройства, позволяющие контролировать скорость движения транспортного средства, могут приводиться в действие с помощью вакуумных систем. Разрежение может обеспечиваться двигателем через впускной коллектор двигателя. В качестве альтернативы, для обеспечения разрежения может быть использован вакуумный насос. По существу, при разрежении, недостаточном для выполнения торможения, может возникнуть ситуация «жесткого» хода педали тормоза, при которой для достижения желаемого торможения водителю транспортного средства необходимо прикладывать к педали тормоза большее усилие, чем обычно. Были разработаны различные подходы для смягчения такого «жесткого» хода педали тормоза.
Один из таких подходов был изложен Камия и др. в патенте US 6,754,579. В описанной системе контроллер двигателя автоматически запускает двигатель, когда установлено, что разрежение в усилителе тормозной системы является недостаточным. В частности, в патенте Камия предлагается регулировать автоматический повторный запуск двигателя на основании величины нажатия педали тормоза и величины разрежения в системе усиления тормозов.
Однако было обнаружено, что такой подход может вызывать проблемы. Например, период, в течение которого водитель ощущает жесткую педаль тормоза, может быть увеличен на время, необходимое для повторного запуска двигателя и создания необходимой степени разрежения. В качестве другого примера, могут возникнуть ситуации, когда даже при повторном запуске двигателя желаемая степень разрежения не может быть обеспечена в силу наличия других задач, выполняемых двигателем.
Раскрытие изобретения
По крайней мере некоторые из вышеуказанных проблем могут быть, по крайней мере частично, решены с помощью предложенного способа улучшения хода педали тормоза. Способ подразумевает регулирование параметра управления тормозами в случае, если ожидается изменение хода педали тормоза, при этом ожидаемое изменение оценивается на основании соотношения давления в гидравлической тормозной магистрали и давления в усилителе тормозной системы. Таким образом, давление в гидравлической тормозной магистрали может быть увеличено до того, как возникла ситуация «жесткого» хода педали тормоза.
В другом примере, контроллер двигателя может делать предположение или определять, что ожидается изменение хода педали тормоза на основании соотношения давления в гидравлической тормозной системе и давления в усилителе тормозной системы (или степени разреженности). В частности, когда ожидается изменение (например, увеличение) силы воздействия на педаль, требуемой для перемещения педали тормоза, контроллер двигателя может сделать предположение, что ситуация жесткого хода педали неизбежно возникнет. Соответственно, перед возникновением ситуации жесткого хода педали, контроллер может увеличить давление в гидравлической тормозной магистрали посредством увеличения гидравлического усиления в тормозной магистрали. Более конкретно, может быть запущен электрический насос гидравлического усилителя тормозов (например, электрический насос, соединенный с элементом гидравлического усилителя тормозов или элементом тормозной системы с ABS) и подача данного насоса может быть увеличена. В качестве альтернативы, или дополнительно, может быть увеличена степень разрежения в усилителе тормозов, например, с использованием вакуумирующего воздействия из впускного коллектора двигателя.
Таким образом, путем увеличения давления в гидравлической тормозной магистрали с помощью регулирования одного или более элементов тормозной системы до того, как возникла ситуация жесткого хода педали тормоза, можно избежать жесткого хода педали тормоза, который ощущает водитель при торможении. За счет этого впечатления водителя от езды могут быть улучшены.
Вышеописанные и другие преимущества, а также характеристики настоящего изобретения будут явно видны из следующего подробного описания, рассматриваемого отдельно или вместе с сопроводительными чертежами.
Следует понимать, что вышеприведенное краткое изложение сущности изобретения представлено для приведения в упрощенной форме ряда выбранных концепций, дальнейшее описание которых приводится ниже. Данное изложение сущности изобретения не направлено на определение основных или существенных характеристик заявленного предмета изобретения, объем которого однозначно определяется формулой изобретения. Кроме того, заявленный предмет изобретения не ограничивается только вариантами реализации изобретения, устраняющими какой-либо из недостатков, указанных выше или в любой части данного описания.
Краткое описание чертежей
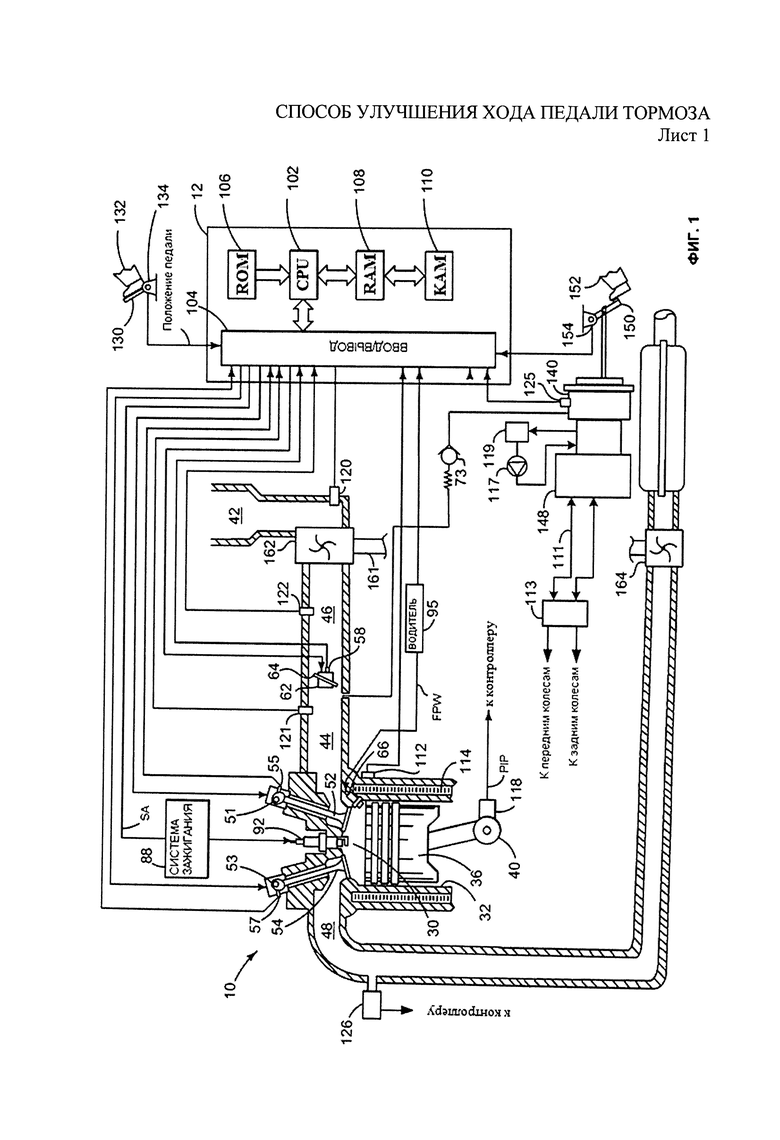
На Фиг.1 представлено схематичное изображение двигателя и соответствующей тормозной системы.
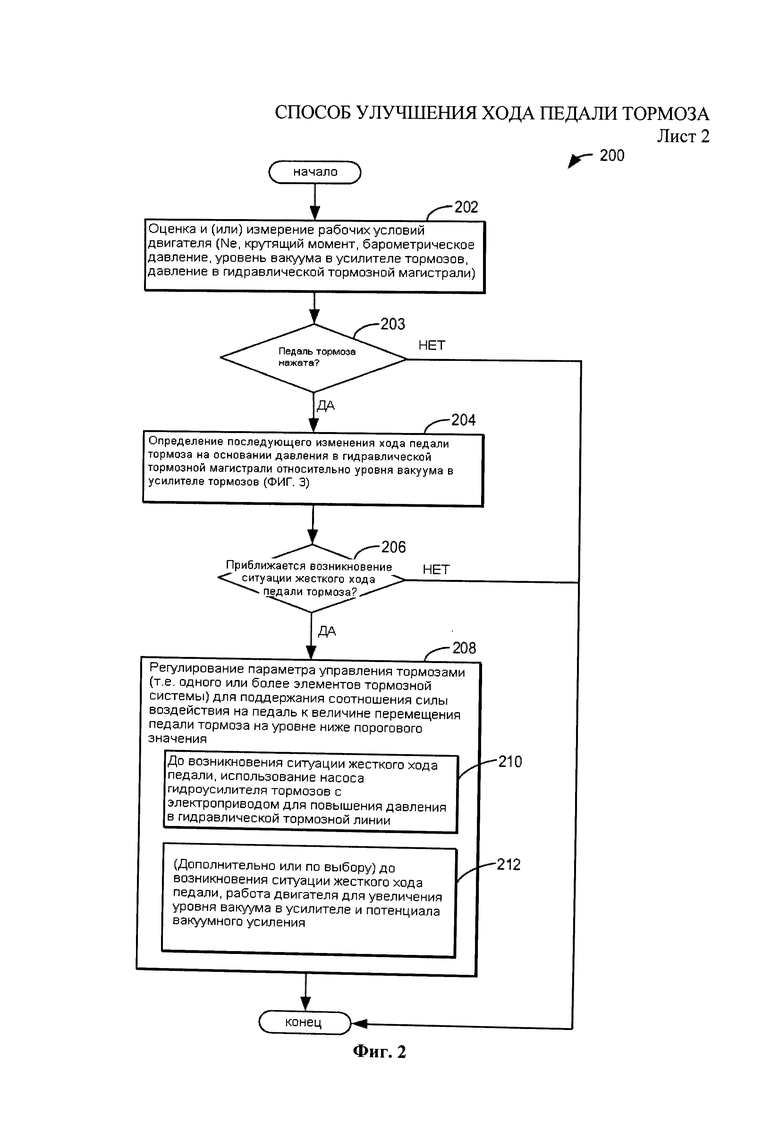
На Фиг.2 представлена высокоуровневая блок-схема иллюстративного способа улучшения хода педали тормоза.
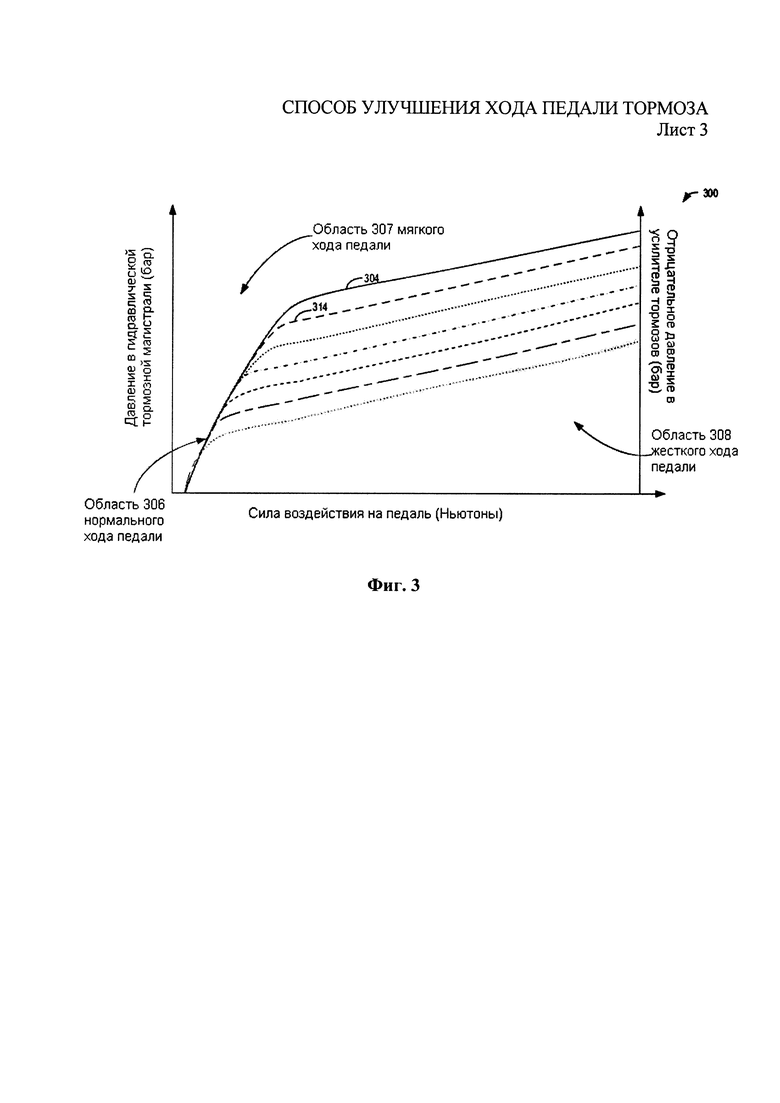
На Фиг.3 представлены характеристические кривые давления в гидравлической тормозной магистрали по сравнению со степенью разрежения в усилителе тормозов, которое может быть использовано для предотвращения ситуации жесткого хода педали тормоза.
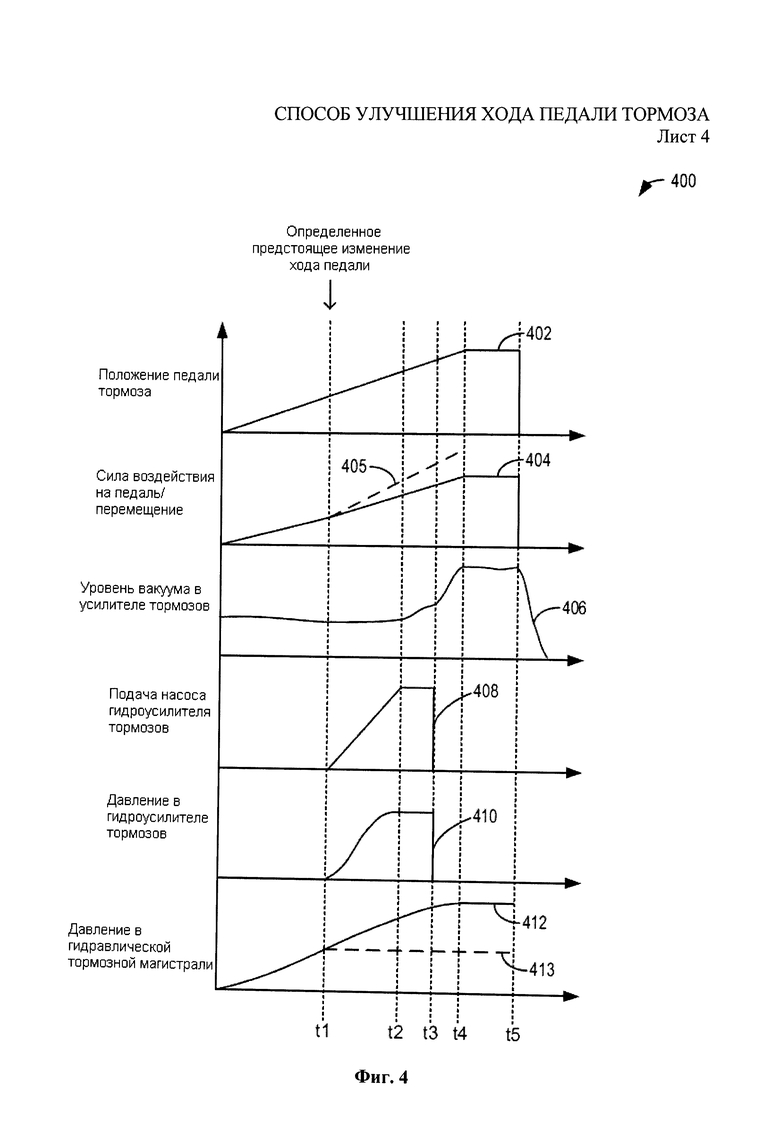
На Фиг.4 представлен пример регулирования одного или более элементов тормозной системы в случае ожидаемого изменения хода педали.
Осуществление изобретения
Настоящее описание относится к способам и системам улучшения хода педали тормоза для снижения вероятности возникновения «жесткого» хода педали тормоза в системе двигателя, такой как система двигателя, показанная на Фиг.1. Контроллер двигателя может быть выполнен с возможностью выполнения управляющей программы, например, программы, показанной на Фиг.2, для регулирования работы одного или более элементов тормозной системы с целью увеличения давления в гидравлической тормозной магистрали до того, как возникла ситуация жесткого хода педали. Контроллер может быть выполнен с возможностью делать предположение о предстоящем изменении хода педали (то есть силы воздействия на педаль, необходимой для достижения желаемого изменения положения педали тормоза) на основании соотношения давления в гидравлической тормозной магистрали и степени разреженности в усилителе тормозов, например, с использованием характеристических кривых, приведенных на Фиг.3. Как показано в примере на Фиг.4, с помощью выполнения соответствующих регулировок до того, как возникла ситуация жесткого хода педали, давление в тормозной магистрали может быть увеличено так, что отношение применяемой силы воздействия на педаль к величине перемещения педали тормоза может поддерживаться ниже порогового значения. То есть, может поддерживаться более «мягкий» ход педали тормоза.
На Фиг.1 показана схема двигателя 10 внутреннего сгорания, который содержит несколько цилиндров (на Фиг.1 показан только один из цилиндров) и управляется электронным контроллером 12. Двигатель 10 содержит камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, размещенным в них и соединенным с коленчатым валом 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответствующие впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может быть приведен в действие впускным кулачком 51 и выпускным кулачком 53. Положение впускного кулачка 51 может быть определено датчиком 55 впускного кулачка. Положение выпускного кулачка 53 может быть определено датчиком 57 выпускного кулачка.
Топливный инжектор 66 показан расположенным таким образом, чтобы впрыскивать топливо непосредственно в камеру сгорания 30, что известно специалистам в данной области как «прямой впрыск». В качестве альтернативы, топливо может впрыскиваться во впускной канал, что известно специалистам в данной области техники как впрыск во впускной канал. Топливный инжектор 66 поставляет топливо пропорционально ширине импульса сигнала FPW от контроллера 12. Топливо подается к топливному инжектору 66 топливной системой (не показана), содержащей топливный бак, топливный насос и топливное реле (не показано). На топливный инжектор 66 подается рабочий ток от привода 95, который отвечает на сигналы контроллера 12. Кроме того, впускной коллектор 44 показан сообщающимся с необязательным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для контроля воздушного потока из впускной нагнетающей камеры 46.
Компрессор 162 втягивает воздух из воздухозаборника 42 для подачи в нагнетающую камеру 46. Выхлопные газы раскручивают турбину 164, которая соединена с компрессором 162 через вал 161. В некоторых случаях может быть установлен охладитель наддувочного воздуха. Перепускной клапан (не показан), соединенный с турбиной, может позволить отработавшим газам обходить турбину 164 так, что давление наддува может регулироваться в зависимости от меняющихся рабочих условий.
Двигатель может быть соединен с тормозной системой, такой как антиблокировочная тормозная система, включающей различные тормозные элементы, предназначенные для регулирования давления в гидравлической тормозной магистрали. Данные элементы могут включать в себя, например, электрический насос, усилитель тормозов с вакуумным приводом и гидравлический усилитель тормозов, как описано в данном документе. Усилитель 140 тормозов, включая внутреннюю вакуумную камеру, может быть выполнен с возможностью обеспечивать вакуумное усиление при использовании тормозной системы. Более конкретно, усилитель 140 тормозов может увеличивать силу воздействия ноги 152 через педаль 150 тормоза на главный цилиндр 148 для приведения в действие тормозов транспортного средства (не показаны). В одном примере, как показано на чертеже, усилитель тормозов может быть соединен с впускным коллектором 44 двигателя 10 после компрессора 162, только посредством контрольного клапана 73. При этом контрольный клапан 73 позволяет потоку воздуха проходить к впускному коллектору 44 от усилителя 140 тормозов и ограничивает поток воздуха, идущий к усилителю 140 тормозов от впускного коллектора 44. Контрольный клапан 73 принимает на себя быстрый сброс давления в вакуумной камере, когда давление в камере является относительно высоким, а давление во впускном коллекторе является низким. Соответственно, в вакуумной камере усилителя 140 тормозов быстро обеспечивается пониженное давление из впускного коллектора 44 через контрольный клапан 73. В альтернативных вариантах выполнения изобретения, пониженное давление для усилителя 140 тормозов может также обеспечиваться вакуумным насосом (не показан) через контрольный клапан (не показан), который позволяет воздуху проходить в вакуумный насос из усилителя 140 тормозов, и ограничивает поток воздуха, идущий к усилителю 140 тормозов от вакуумного насоса.
Гидравлический усилитель 116 тормозов, соединенный с насосом 117 гидравлического усилителя тормозов, имеющим электропривод, и пополнительным бачком 119 гидравлической тормозной системы, может быть выполнен с возможностью обеспечения гидравлического усиления при торможении. Насос 117 гидравлического усилителя тормозов может, например, представлять собой насос с электроприводом и работать с использованием аккумулятора. Гидравлический усилитель 116 тормозов может быть установлен между усилителем 140 тормозов с вакуумным приводом и гидравлической тормозной магистралью 111, а именно между усилителем 140 тормозов и главным цилиндром 148. Тормозное устройство, такое как автомобильные тормоза, соединенные с колесами транспортного средства (не показаны), может быть гидравлически подключено после главного цилиндра 148, например, через гидравлическую тормозную магистраль 111. Тормозное устройство может представлять собой любое подходящее устройство, такое как барабанные тормоза или дисковые тормоза. Кроме того, с тормозным устройством может быть соединена антиблокировочная тормозная система (ABS) 113, например, после главного цилиндра 148. В одном варианте выполнения изобретения, ABS 113 может быть гидравлически соединена с главным цилиндром 148 и четырьмя рабочими тормозными цилиндрами левого переднего колеса, правого переднего колеса, левого заднего колеса и правого заднего колеса.
Бесконтактная система 88 зажигания подает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал контроллера 12. Показанный универсальный датчик 126 содержания кислорода в отработавших газах (UEGO) соединен с выпускным коллектором 48 выше по потоку каталитического нейтрализатора 70 отработавших газов. В альтернативном варианте осуществления изобретения вместо датчика 126 UEGO может быть использован бистабильный датчик содержания кислорода в отработавших газах.
В одном варианте осуществления изобретения каталитический нейтрализатор 70 может содержать несколько каталитических блоков. В другом варианте осуществления изобретения могут быть использованы несколько устройств снижения токсичности отработавших газов, каждое из которых содержит несколько блоков. В одном варианте осуществления изобретения каталитический нейтрализатор 70 может представлять собой трехкомпонентный каталитический нейтрализатор.
Контроллер 12 показан на Фиг.1 как стандартный микрокомпьютер, содержащий: микропроцессор 102 (CPU), порты 104 ввода/вывода, постоянное запоминающее устройство 106 (ROM), оперативную память 108 (RAM), оперативную энергонезависимую память ПО (КАМ) и обычную шину данных. Контроллер 12 показан получающим различные сигналы от датчиков, соединенных с двигателем 10. Помимо описанных выше сигналов, контроллер также получает данные: о температуре охлаждающей жидкости двигателя (ЕСТ) от датчика 112 температуры, соединенного с каналом 114 охлаждения; датчика 134 положения, соединенного с педалью газа 130, для измерения силы нажатия ногой 132; сигнал от позиционного датчика 154, соединенного с педалью 150 тормоза, для определения положения педали тормоза; сигнал от датчика детонации для определения воспламенения остаточных газов (не показан); данных об измерении давления в коллекторе двигателя (MAP) от датчика давления 121, соединенного с впускным коллектором 44; о давлении наддува от датчика 122 давления, соединенного с камерой 46 наддува; данные о давлении в камере усилителя тормозов от датчика 125 давления; о фазе двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; показаний датчика 120 воздушной массы, поступающей в двигатель (например, теплового измерителя воздушного потока); и показаний положения дросселя датчика 58. Также для контроллера 12 может быть измерено барометрическое давление (датчик не показан). Согласно предпочтительному варианту воплощения изобретения, позиционный датчик 118 на эффекте Холла производит заранее установленное количество равномерных импульсов в каждый цикл коленчатого вала, на основании которых может быть определена скорость вращения двигателя (RPM).
В некоторых примерах в автомобиле с гибридным приводом двигатель может быть соединен с электродвигателем/системой аккумулятора. Автомобиль с гибридным приводом может иметь параллельную и последовательную конфигурации, а также их комбинации и вариации. Дополнительно в некоторых вариантах осуществления настоящего изобретения могут быть использованы другие типы двигателя, например, дизельный двигатель.
Во время работы каждый цилиндр в двигателе 10 обычно проходит 4 рабочих цикла: впуск, сжатие, рабочий ход и выпуск. Во время впуска обычно выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух поступает в камеру сгорания 30 через впускной коллектор 44, а поршень 36 двигается по направлению к дну цилиндра так, чтобы увеличить объем внутри камеры сгорания 30. Положение, в котором поршень 36 находится рядом с дном цилиндра и в конце своего хода (т.е. когда камера сгорания 30 имеет наибольший объем) обычно называется специалистами в данной области нижней мертвой точкой (НМТ). Во время хода сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 двигается по направлению к головке цилиндров, чтобы сжать воздух внутри камеры сгорания 30. Точка, в которой поршень 36 находится в конце своего хода и наиболее близко к головке цилиндров (т.е. когда камера сгорания 30 имеет наименьший объем) обычно называется специалистами в данной области верхней мертвой точкой (ВМТ). В процессе, здесь и далее обозначаемом «впрыскивание», топливо поступает в камеру сгорания. В процессе, здесь и далее обозначаемом «зажигание», впрыснутое топливо воспламеняют с помощью известных способов зажигания, таких как свеча 92 зажигания, что приводит к сгоранию. Во время рабочего хода расширяющиеся газы толкают поршень 36 обратно к НМТ. Коленчатый вал 40 превращает движение поршня в крутящий момент вращающегося вала. Наконец, во время хода выпуска, выпускной клапан 54 открывается, чтобы выпустить воспламененную смесь воздуха и топлива в выпускной коллектор 48, а поршень возвращается к ВМТ. Можно отметить, что вышеизложенное приведено только в качестве примера, и распределение по времени открывания и/или закрывания впускного и выпускного клапанов может меняться так, чтобы обеспечить положительное или отрицательное перекрытие клапанов, позднее закрывание впускного клапана или различные другие варианты.
На Фиг.2 подробно проиллюстрирован пример способа 200 улучшения хода педали тормоза. Данный способ подразумевает регулирование параметра управления тормозами, когда ожидается изменение хода педали тормоза, причем ожидание изменения основывается на соотношении давления в гидравлической тормозной магистрали и давления в усилителе тормозов. Посредством регулирования давления в гидравлической тормозной магистрали возникновение жесткого хода педали тормоза можно предотвратить.
На этапе 202 данный способ включает в себя измерение и/или оценку рабочих условий двигателя. Такие условия могут включать в себя, например, скорость вращения двигателя, температуру охлаждающей жидкости двигателя, температуру каталитического нейтрализатора, давление в усилителе тормозов (то есть, степень разрежения в вакуумной камере усилителя тормозов), давление в гидравлической тормозной магистрали, желаемый крутящий момент двигателя, скорость транспортного средства, барометрическое давление и так далее. На этапе 203 может быть подтверждено, что тормоза транспортного средства приведены в действие. То есть, может быть подтверждено, что водитель транспортного средства нажал ногой на педаль тормоза. При этом, после активирования педали тормоза, в зависимости от преобладающих рабочих условий, в двигатель либо по-прежнему может поступать топливо, либо подача топлива может быть прекращена. В одном примере, когда состояние заряда аккумулятора транспортного средства ниже порогового значения, подача топлива в двигатель может быть продолжена. В другом примере, когда уровень заряда аккумулятора транспортного средства выше порогового значения, может быть осуществлено замедление подачи топлива до полного отключения.
При подтверждении использования педали тормоза, на этапе 204 на основании соотношения давления в гидравлической тормозной магистрали и уровня разрежения в усилителе тормозов определяют возможность предстоящего изменения хода педали тормоза. При этом ход педали тормоза включает в себя усилие воздействия на педаль, требуемое для перемещения педали тормоза в заданное положение. Далее, предпочтительным является нормальный или «мягкий» ход педали тормоза, при котором усилие воздействия на педаль, необходимое для перемещения педали тормоза в заданное положение, поддерживается на уровне ниже порогового значения. Тем не менее, при определенных условиях, может возникнуть «жесткий» ход педали, при котором усилие воздействия на педаль, необходимое для перемещения педали тормоза в заданное положение, больше порогового значения. По мере того, как ход педали становится жестче, для перемещения педали тормоза в заданное положение требуется прикладывать все большее усилие. Контроллер может использовать справочную таблицу, которая содержит реперы одной или нескольких характеристических кривых, таких как показанные на Фиг.3, для определения, присутствуют ли условия для возникновения ситуации жесткого хода педали тормоза. То есть, контроллер может заранее определять возможность возникновения ситуации жесткого хода педали тормоза, до того, как данная ситуация будет иметь место в действительности, и выполнить ряд смягчающих действий для предотвращения данной ситуации. В результате водитель транспортного средства может не почувствовать жесткого ход педали тормоза при торможении.
На Фиг.3 на диаграмме 300 приведены характеристические кривые изменения усилия воздействия на педаль (по оси X) в зависимости от давления в гидравлической тормозной магистрали (по левой оси Y) относительно постоянного значения отрицательного давления в усилителе тормозов (по правой оси Y). При этом предположение о силе воздействия на педаль может быть сделано на основании соотношения давления в гидравлической тормозной магистрали и значения отрицательного давления в усилителе тормозов, при этом оценка положения педали тормоза не требуется. По сути это позволяет сделать точное предположение об усилии воздействия на педаль тормоза без использования датчика положения педали тормоза, использование которого могло бы привести к увеличению стоимости комплектующих деталей. Когда функционирование тормозов характеризуется любой из представленных характеристических кривых (то есть в области 306 нормального хода педали) обеспечивается нормальный ход педали тормоза. Когда рабочие условия вызывают смещение функционирования тормозов вправо и/или ниже характеристических кривых (то есть в область 308 жесткого хода педали), делается предположение о жестком ходе педали тормоза. Когда рабочие условия вызывают смещение функционирования тормозов влево и/или выше характеристических кривых (то есть в область 307 мягкого хода педали тормоза), может быть сделано предположение об ухудшенном ощущении хода педали тормоза, при котором ход педали является слишком мягким.
Как показано на диаграмме 300, для представленного сочетания гидравлического давления в усилителе тормозов и значения разрежения в усилителе тормозов при заданной силе воздействия на педаль ход педали тормоза меняется от более мягкого хода до более жесткого хода. Например, первая характеристическая кривая обозначена позицией 304 (сплошная линия). Здесь разрежение в усилителе тормозов может составлять 0,925 бар (или 27 дюймов ртутного столба), в то время как давление в гидравлической тормозной магистрали составляет 0,9 бар. При данных условиях ход педали может быть нормальным при предполагаемых значениях силы воздействия на педаль вдоль более крутого участка кривой 304 (что также показано как область 306 нормального или мягкого хода педали), в то время как ход педали может быть жестким, когда предполагаемая сила воздействия на педаль находится справа или ниже области изгиба кривой 304, а также вдоль более пологой области кривой 304 (показано как область 308 жесткого хода педали). По сути, изгиб кривой может соответствовать пересечению касательных данных двух участков кривой (включая первую более крутую область и вторую более пологую область). По мере того, как уровень разрежения в усилителе тормозов падает (то есть, величина доступного разрежения в вакуумной камере усилителя тормозов становится меньше), изменение в ходе педали может возникнуть даже при относительно низкой силе воздействия на педаль. То есть, жесткий ход педали может возникнуть при торможении раньше. Таким образом, для второй характеристической кривой, обозначенной позицией 314 (пунктирная линия), когда уровень разрежения в усилителе тормозов составляет 0,875 бар (или 24 дюймов ртутного столба), в то время как давление в гидравлической тормозной магистрали составляет 0,8 бар, изменение хода педали тормоза (или область изгиба кривой 314) может возникнуть при меньшей предполагаемой силе воздействия на педаль, чем для кривой 304. Таким образом, посредством сравнения расчетного давления в гидравлической тормозной магистрали (согласно данным от датчика давления в гидравлической тормозной магистрали) с расчетным уровнем разрежения в усилителе тормозов (согласно данным от датчика давления в вакуумной камере) контроллер может определить предстоящую силу воздействия на педаль и, в соответствии с этим, определить, принадлежит ли ход педали области нормального хода педали или приближается к области жесткого хода педали.
На Фиг.2 на этапе 206 определяют, ожидается ли изменение хода педали, в частности, ожидается ли возникновение ситуации жесткого хода педали. Под ожидаемым изменением давления в данном описании подразумевается предположение о предстоящем жестком ходе педали, когда изменение давления в гидравлической тормозной магистрали относительно изменения давления в усилителе тормозов больше порогового значения, и предположение об отсутствии предстоящего жесткого хода педали и отнесение педали тормоза к области нормального (или мягкого) хода, когда изменение давления в гидравлической тормозной магистрали относительно изменения давления в усилителе тормозов ниже порогового значения.
Если ожидаемое возникновение ситуации жесткого хода педали не подтверждается, данная последовательность программных действий может завершиться. При подтверждении ситуации жесткого хода педали на этапе 208 один или более параметров управления тормозами могут быть отрегулированы до того, как ситуация жесткого хода педали возникла в действительности, для поддержания соотношения силы воздействия на педаль тормоза и величины перемещения педали тормоза на уровне ниже порогового значения. То есть можно предотвратить жесткий ход педали посредством поддержания мягкого хода педали с помощью регулирования одного или более элементов тормозной системы.
В одном примере, как показано на этапе 210, параметром управления тормозами является гидравлическое усиление тормозов от гидравлического усилителя тормозов тормозной системы транспортного средства. Здесь регулирование параметра может включать в себя, по мере того как предстоящее изменение хода педали сдвигается в сторону более жесткого хода педали, увеличение гидравлического усиления тормозов, обеспечиваемого для гидравлической тормозной магистрали, для увеличения давления в гидравлической тормозной магистрали. Более конкретно, увеличение гидравлического усиления тормозов может включать в себя использование насоса гидравлического усилителя тормозов с электроприводом для увеличения гидравлического давления (или потока) на выходе из насоса. Насос может быть соединен с другими элементами тормозной системы, такими как тормоза с антиблокировкой.
В другом примере, как показано на этапе 212, параметром управления тормозами может являться уровень разрежения в усилителе тормозов. В этом случае регулирование может включать в себя, по мере того как предстоящее изменение хода педали сдвигается в сторону более жесткого хода педали, увеличение степени разрежения в усилителе тормозов посредством работы двигателя в течение некоторого периода времени. Например, если двигатель находился в режиме замедления подачи топлива до ее выключения, то при подтверждении предстоящего изменения в ходе педали в двигатель может быть подано больше топлива, и двигатель может работать в течение некоторого периода времени для обеспечения отрицательного давления во впускном коллекторе, который затем используется для восполнения разрежения камеры усилителя тормозов с вакуумным приводом.
В других примерах, как подробно описано ниже в отношении примера на Фиг.4, может быть использовано сочетание гидравлического усиления тормозов и создания разрежения для увеличения давления в гидравлической тормозной магистрали и снижения вероятности жесткого хода педали. Таким образом посредством составления предположения о предстоящем жестком ходе педали до того, как данная ситуация возникнет в действительности, а также посредством регулирования элементов тормозной системы до возникновения ситуации жесткого хода педали, количество ситуаций жесткого хода педали может быть сокращено, а ощущение хода педали, испытываемое водителем, может быть улучшено.
На фиг.4 на диаграмме 400 представлен пример сценария, где для улучшения хода педали тормоза используют регулировки одного или более компонентов тормозной системы (или параметров управления тормозами). На диаграмме 400 график 402 демонстрирует пример изменений положения педали тормоза, график 404 демонстрирует изменение соотношения силы нажатия на педаль и величины перемещения педали тормоза (здесь и далее именуемое как ход педали), график 406 демонстрирует изменение степени разрежения в усилителе тормозов, график 408 демонстрирует изменение объема подачи насосом гидравлического усилителя тормозов, график 410 демонстрирует изменение давления в гидравлическом усилителе тормозов, а график 412 демонстрирует изменение давления в гидравлической тормозной магистрали, в ходе эксплуатации транспортного средства (время, отложенное по оси X).
В момент времени tO водитель транспортного средства может начать использовать педаль тормоза (как показано изменением положения педали тормоза или ее перемещения). Водитель может продолжать нажимать на педаль тормоза между моментами t0 и t4, и удерживать педаль в одном положении между моментами t4 и t4. Затем в момент времени t5 водитель может отпустить педаль тормоза (см. график 402). В момент времени, когда водитель начинает использовать педаль тормоза, степень разрежения в усилителе тормозов может быть выше порогового значения настолько, что усилитель тормозов может обеспечить достаточное вакуумное усиление тормозов и ход педали (см. график 404). Поэтому ход педали остается «мягким» или нормальным (то есть ниже порогового значения). В момент времени t1 на основании соотношения давления в гидравлической тормозной магистрали и степени разрежения в усилителе тормозов, при отсутствии любых дальнейших регулировок сила воздействия на педаль, необходимая для перемещения педали тормоза, может начать увеличиваться (пунктирная линия 405) так, что в результате может возникнуть ситуация жесткого хода педали. Например, при отсутствии регулировок соотношение силы воздействия на педаль и величины перемещения педали может начать увеличиваться до момента предполагаемого возникновения ситуации жесткого хода педали в момент t4. Так как педаль тормоза нажата и обеспечивается вакуумное усиление, давление в гидравлическом тормозе может начать увеличиваться (см. график 412). При этом при отсутствии дальнейших регулировок после момента t1 дальнейшее повышение давления в гидравлической тормозной магистрали в ответ на продолжающееся изменение положения педали тормоза может быть невозможным. То есть, давление в гидравлической тормозной магистрали может насыщаться (как показано пунктирной линией 413).
Соответственно, в момент t1 контроллер на основании данных о степени разрежения в усилителе тормозов относительно давления в гидравлической тормозной магистрали может сделать предположение о том, что ожидается ситуация жесткого хода педали, до того, как она фактически возникает. При этом предположение об ожидаемой ситуации жесткого хода педали определяется без учета изменения положения педали тормоза. В результате такого предположения, сделанного между моментами t1 и t4, контроллер может увеличивать давление в гидравлической тормозной магистрали, посредством регулирования одного или нескольких элементов тормозной системы, для поддержания соотношения силы воздействия на педаль и величины перемещения педали тормоза на уровне ниже порогового значения (то есть для удержания хода педали на сплошной линии 404). При этом регулирование одного или нескольких элементов тормозной системы может быть выполнено до того, как ситуация жесткого хода педали фактически возникла.
В проиллюстрированном примере один или более элементов тормозной системы включают в себя насос гидравлического усилителя тормозов с электроприводом и усилитель тормозов с вакуумным приводом. В приведенном примере регулятор может сначала регулировать работу насоса гидравлического усилителя тормозов, а затем, при необходимости, выполнить дальнейшее регулирование степени разреженности в усилителе тормозов. А именно, между моментами t1 и t2 регулятор может регулировать работу насоса с электроприводом для увеличения объема подачи насоса (см. график 408) и, соответственно, для увеличения давления в гидравлической тормозной магистрали (см. график 410). Это позволяет продолжать увеличивать давление в гидравлической тормозной магистрали в ответ на продолжающееся перемещение педали тормоза (см. график 412).
В одном примере, в зависимости от состояния заряда аккумулятора, питающего электронасос, насос может работать с максимальной подачей в течение времени, соответствующего периоду от t2 до t3, после чего может потребоваться прерывание работы насоса. При этом если работа насоса прерывается в процессе торможения, может снова возникнуть изменение хода педали в сторону жесткого хода педали. Соответственно, при наличии вероятности того, что после момента t3 дальнейшая подача насоса будет недоступна, регулятор может инициировать выполнение ряда регулировок степени разрежения в усилителе тормозов. В одном примере может быть инициировано выключение подачи топлива в режиме замедления в результате использования педали тормоза в момент времени t1. Соответственно, в момент t2 контроллер может возобновить подачу топлива в двигатель, и двигатель будет работать в течение определенного периода времени (между t2 и t4) для увеличения разрежения во впускном коллекторе, и, соответственно, для увеличения разрежения в усилителе тормозов. В частности, между моментами t2 и t3, когда подача насоса и соответствующее гидравлическое усиление тормозов являются доступными, степень разрежения в усилителе тормозов может быть увеличена на первое, меньшее значение. Затем, между моментами t3 и t4, когда работа насоса прерывается, и гидравлическое усиление тормозов недоступно, но педаль тормоза продолжает использоваться, степень разрежения в усилителе тормозов может быть увеличена на второе, большее значение, для компенсирования (недоступного в данный момент) гидравлического усиления тормозов, при одновременном обеспечении требуемого вакуумного усиления при торможении. При этом приведенный пример включает в себя увеличение давления в гидравлической тормозной магистрали до первого порогового значения давления (то есть, давления в тормозной магистрали, достигаемого в момент t2) посредством увеличения давления в гидравлическом усилителе тормозов, и затем посредством дальнейшего увеличения давления в гидравлической тормозной магистрали выше первого порогового значения с помощью увеличения разрежения в усилителе тормозов.
Между моментами t4 и t5, когда положение педали поддерживается на одном уровне, степень разрежения в усилителе тормозов и давление в гидравлической тормозной магистрали также может поддерживаться на постоянном уровне. Затем, в момент t5, после отпускания педали тормоза, давление в тормозной магистрали и степень разрежения в усилителе тормозов могут быть уменьшены.
Таким образом, посредством увеличения давления в гидравлической тормозной магистрали с помощью регулирования одного или более элементов тормозной системы соотношение усилия воздействия на педаль и величины перемещения педали тормоза может поддерживаться в установленных пределах. За счет проведения ряда регулировок после детектирования ожидаемого изменения хода педали, ситуация жесткого хода педали может быть предотвращена. С помощью предположения об ожидаемой ситуации жесткого хода педали, сделанного на основании данных о давлении в гидравлической тормозной магистрали и степени разрежения в усилителе тормозов, может быть уменьшена необходимость использования дорогостоящих датчиков определения положения педали тормоза для детектирования ситуации жесткого хода педали. За счет идентификации ожидаемой ситуации жесткого хода педали и его предварительного смягчения ощущения водителя во время вождения могут быть улучшены.
Можно отметить, что примеры управляющих и оценочных программ, приведенные в данном описании, могут быть использованы для различных конфигураций двигателей и/или систем транспортного средства. Конкретные программы, могут включать в себя один или более алгоритмов обработки из любого количества аналитических стратегий, таких как управление событиями, управление прерываниями, многозадачность, многопоточность и подобные. Таким образом, различные шаги, операции или функции могут быть выполнены в приведенной последовательности, параллельно, или в некоторых случаях могут быть исключены. Аналогичным образом, данный порядок обработки не обязательно должен соблюдаться для достижения целей, характеристик или преимуществ, описанных в данном документе, но предоставлен для простоты иллюстрирования и описания. Один или более из приведенных шагов или функций могут выполняться многократно, в зависимости от конкретного используемого алгоритма. Кроме того, описанные действия могут графически представлять программный код для записи на машиночитаемый носитель данных в системе управления двигателем.
Следует понимать, что конфигурации и последовательности операций, раскрытые в данном описании, являются примерами, и что эти конкретные варианты выполнения не следует рассматривать как ограничительные, поскольку возможны их различные варианты и модификации. Например, возможно использование описанной технологии для двигателей V6, I-4, I-6, V12, оппозитных двигателей с четырьмя цилиндрами, а также других типов двигателей.
Группа изобретений относится к области автомобилестроения. Система транспортного средства содержит двигатель, педаль тормоза, тормозную систему и систему управления. В ответ на ожидаемое состояние жесткого хода педали увеличивают давление в гидравлической тормозной магистрали до первого порогового давления посредством увеличения давления в гидравлическом усилителе тормозов и дополнительно увеличивают давление в гидравлической тормозной магистрали выше первого порогового давления посредством увеличения разрежения в усилителе тормозов. Способ улучшения хода педали тормоза, в котором при применении педали тормоза регулируют изменяемый параметр управления тормозами. Способ улучшения хода педали тормоза, в котором на основании соотношения разрежения в усилителе тормозов и давления в гидравлической тормозной магистрали определяют ожидаемое состояние жесткого хода педали до возникновения ожидаемого состояния жесткого хода педали. Достигается улучшение хода педали тормоза для снижения вероятности возникновения жесткого хода педали тормоза в системе двигателя. 3 н. и 17 з.п. ф-лы, 4 ил.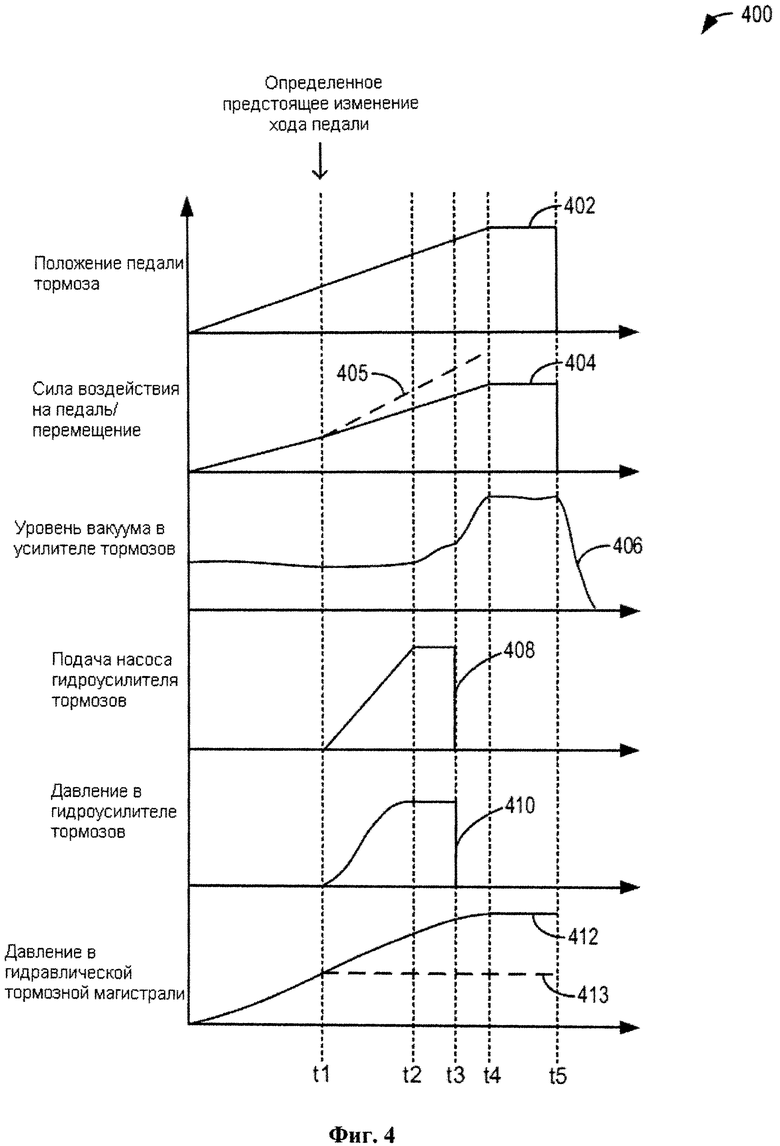
1. Способ улучшения хода педали тормоза в транспортном средстве, в котором при применении педали тормоза регулируют изменяемый параметр управления тормозами в ответ на ожидаемое изменение хода педали в сторону более жесткого хода педали, причем упомянутое ожидаемое изменение определяют на основании соотношения давления в гидравлической тормозной магистрали и давления в усилителе тормозов до возникновения упомянутого более жесткого хода педали.
2. Способ по п. 1, в котором упомянутое регулирование выполняют до того, как более жесткий ход педали изменился, причем упомянутое регулирование поддерживает ход педали за счет сохранения соотношения усилия воздействия на педаль и величины перемещения педали тормоза на уровне ниже порогового значения.
3. Способ по п. 2, в котором ожидаемое изменение хода педали определяют без оценки положения педали тормоза.
4. Способ по п. 2, в котором ожидаемое изменение хода педали включает в себя определение ожидаемого жесткого хода педали, когда соотношение изменения давления в гидравлической тормозной магистрали и изменения давления в усилителе тормозов превышает пороговое значение.
5. Способ по п. 2, в котором изменяемый параметр управления тормозами включает в себя давление в гидравлическом усилителе тормозов, при этом упомянутое регулирование включает в себя то, что по мере смещения ожидаемого изменения хода педали в сторону более жесткого хода педали увеличивают давление в гидравлическом усилителе тормозов для увеличения давления в гидравлической тормозной магистрали посредством увеличения выхода насоса гидравлического усилителя тормозов с электроприводом.
6. Способ по п. 5, в котором ход педали включает в себя усилие воздействия на педаль, необходимое для перемещения педали тормоза в заданное положение педали, и при этом более жесткий ход педали включает в себя усилие воздействия на педаль, превышающее пороговое значение, для перемещения педали тормоза в заданное положение педали.
7. Способ по п. 5, в котором увеличение давления в гидравлическом усилителе тормозов включает в себя то, что управляют насосом гидравлического усилителя тормозов с электроприводом для увеличения выхода насоса, причем упомянутый насос соединен с тормозной системой транспортного средства.
8. Способ по п. 2, в котором изменяемый параметр управления тормозами представляет собой разрежение в усилителе тормозов.
9. Способ по п. 8, в котором упомянутое регулирование включает в себя то, что по мере смещения ожидаемого изменения хода педали в сторону более жесткого хода педали увеличивают разрежение в усилителе тормозов посредством эксплуатации двигателя в течение некоторого периода времени.
10. Способ улучшения хода педали тормоза, в котором на основании соотношения разрежения в усилителе тормозов и давления в гидравлической тормозной магистрали определяют ожидаемое состояние жесткого хода педали до возникновения упомянутого ожидаемого состояния жесткого хода педали; и в ответ на упомянутое определение увеличивают давление в гидравлической тормозной магистрали посредством регулирования одного или более элементов тормозной системы для поддержания соотношения усилия воздействия на педаль и величины перемещения педали тормоза на уровне ниже порогового значения.
11. Способ по п. 10, в котором регулирование одного или более элементов тормозной системы выполняют до возникновения упомянутого состояния жесткого хода педали.
12. Способ по п. 10, в котором один или более элементов тормозной системы включают в себя насос гидравлического усилителя тормозов с электроприводом и усилитель тормозов с вакуумным приводом.
13. Способ по п. 12, в котором упомянутое регулирование включает в себя то, что управляют упомянутым насосом с электроприводом для увеличения давления в гидравлическом усилителе тормозов.
14. Способ по п. 12, в котором упомянутое регулирование включает в себя то, что эксплуатируют двигатель в течение некоторого периода времени для увеличения разрежения в усилителе тормозов.
15. Способ по п. 10, в котором упомянутое состояние жесткого хода педали включает в себя необходимость приложения большего усилия воздействия на педаль для заданного перемещения педали тормоза.
16. Способ по п. 10, в котором состояние жесткого хода педали определяют не основываясь на оцененном изменении положения педали тормоза.
17. Система транспортного средства, содержащая:
двигатель;
педаль тормоза;
тормозную систему, содержащую электрический насос, гидравлический усилитель тормозов и усилитель тормозов с вакуумным приводом; и
систему управления с машиночитаемыми командами для в ответ на ожидаемое состояние жесткого хода педали увеличения давления в гидравлической тормозной магистрали до первого порогового давления посредством увеличения давления в гидравлическом усилителе тормозов и дополнительного увеличения давления в гидравлической тормозной магистрали выше первого порогового давления посредством увеличения разрежения в усилителе тормозов.
18. Система по п. 17, в которой система управления содержит дополнительные команды для определения ожидаемого состояния жесткого хода педали до возникновения состояния жесткого хода педали на основании соотношения степени разрежения в усилителе тормозов и давления в гидравлической тормозной магистрали.
19. Система по п. 17, в которой усилитель тормозов с вакуумным приводом соединен с впускным коллектором двигателя ниже по потоку от компрессора турбонагнетателя только через контрольный клапан.
20. Система по п. 17, в которой гидравлический усилитель тормозов подсоединен между усилителем тормозов с вакуумным приводом и гидравлической тормозной магистралью.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА С АНТИБЛОКИРОВОЧНЫМ УСТРОЙСТВОМ | 1996 |
|
RU2155685C2 |
| Тормозная система автомобиля | 1985 |
|
SU1369953A1 |

