Настоящее изобретение относится к способу фиксации угла установки лопасти ротора для ротора ветровой турбины. Кроме того, настоящее изобретение относится к измерительному приспособлению, предназначенному для фиксации угла установки лопасти ротора для ротора ветровой турбины.
В частности, настоящее изобретение основано на так называемой ветровой турбине с горизонтальной осью, имеющей по меньшей мере одну и, как правило, три регулируемые лопасти ротора. Эти лопасти ротора могут регулироваться в отношении угла их установки и, следовательно, их углов атаки относительно ветра для получения из ветра энергии самым оптимальным способом или для уменьшения или ограничения энергии, получаемой из ветра, в частности в случае высоких скоростей ветра. При выполнении регулирования угла установки лопасти ротора, которое также упоминается как изменение угла установки, блок регулирования, в принципе, может фиксировать текущий угол установки лопасти, причем в настоящем документе этот термин является синонимом к термину угла установки лопасти ротора. Однако это предполагает, что фактически существующий угол установки лопасти ротора сначала выравнивается с углом, рассчитанным посредством блока регулирования. Для этой цели требуется зафиксировать фактический угол установки лопасти ротора, то есть фактическое положение лопасти ротора. Также может потребоваться последующее повторение или корректировка такого выравнивания.
В частности, может случиться так, что в случае трех лопастей ротора одна из них находится под неправильным углом установки, а именно под углом установки, отличным от углов установки других двух лопастей ротора, и, следовательно, также под углом установки, отличным от рассчитанного посредством блока регулирования. В последующем, это расхождение углов установки присутствует постоянно в связи с тем, что дальнейшее регулирование лопастей ротора всегда начинается с неправильного угла, то есть начинается с одного одинакового угла для всех трех лопастей ротора, несмотря на то, что один угол отличается. Помимо пониженной эффективности вследствие неправильного угла, это также может привести к неравномерным нагрузкам на лопасти ротора. В результате, в частности, любые подшипники также подвергаются воздействию асимметричной нагрузки, в частности, в отношении оси вращения. Следовательно, помимо отрицательной эффективности, может быть увеличен износ.
В связи с этим, немецкий патент DE 100 323 14 C1 предлагает измерение расстояния между башней ветровой турбины и лопастями ротора, вращающимися рядом с башней. В случае этого измерения расстояния посредством лазерного датчика расстояния, расстояние лопасти ротора, в момент его прохождения рядом при выполнении вращения, и, следовательно, контур лопасти ротора фиксируются квазинепрерывным способом. Устройство лазерного измерения расстояний, соответственно, расположено на башне, и, следовательно, может выполнять это измерение расстояний, и, следовательно, может осуществлять фиксацию контура лопасти ротора в момент его прохождения рядом.
Известный профиль и зафиксированный контур лопасти ротора могут затем быть использованы для определения фактического угла установки лопасти ротора. Такое измерение выполняется для всех лопастей ротора ветровой турбины без промежуточного регулирования задействованных лопастей ротора таким образом, чтобы затем могли быть выполнены сравнение и регулировка всех углов установки этих лопастей ротора. Посредством этого устраняется установка отличающихся углов установки лопастей.
Однако, в случае этого измерения, на угол, зафиксированный посредством измерения расстояния, также всесторонне влияет выравнивание ветровой турбины, а именно так называемое выравнивание ветровой турбины по азимуту. Если это выравнивание ветровой турбины, а именно, в частности, выравнивание гондолы ветровой турбины, которая содержит ротор, или выравнивание оси ротора, отличается от выравнивания лазерного датчика расстояния, это также изменяет зафиксированный угол установки лопасти ротора. Однако следующая из этого погрешность является систематически одинаковой для всех лопастей ротора ветровой турбины, если азимутальное положение остается неизменным во время измерения. Следовательно, лопасти ротора могут, таким образом, тем не менее, быть выравнены друг с другом.
Кроме того, патент описывает, что в случае известного угла между лазерным лучом и ступицей также возможно определять «истинный» угол установки лопасти.
Однако такое определение угла между ступицей и измерительным датчиком может быть сложным, по меньшей мере, если это измерение должно быть очень точным. Повышенная точность может быть достигнута для измерения угла установки лопасти, то есть для измерения расстояния относительно лопасти, с целью взятия замеров контура посредством повторения измерения или измерений всех лопастей ротора. Это, однако, делает возможным лишь повысить точность углов установки лопастей ротора относительно друг друга. Другими словами, в этом случае может быть зафиксирован относительный угол установки лопастей, и лишь точность последнего может быть повышена. Относительный угол установки лопастей должен пониматься как означающий угол установки лопасти относительно других лопастей ротора. Таким образом, фиксация абсолютного угла установки лопасти остается проблематичной, по меньшей мере, в отношении точности.
В приоритетной заявке, относящейся к настоящей заявке, немецкое бюро по регистрации патентов и товарных знаков обнаружило следующий предшествующий уровень техники: DE 10 2011 053 968 A1.
Следовательно, настоящее изобретение основано на задаче устранения вышеупомянутых проблем. В частности, должно быть предложено решение для фиксации абсолютного положения лопасти с максимально возможной точностью. По меньшей мере, должен быть создан альтернативный вариант осуществления.
Согласно изобретению предложен способ по п. 1 формулы изобретения для фиксации угла установки лопасти ротора для ротора ветровой турбины. Следовательно, этот способ обеспечен для выполнения фиксации абсолютного угла установки лопасти для каждой лопасти ротора. В этом случае, абсолютный угол установки лопасти обозначает угол установки лопасти ротора относительно ступицы лопасти, к которой прикреплена лопасть ротора. Таким образом, ступица ротора образует опорный базис для соответствующего угла установки лопасти.
В принципе, точная фиксация угла установки лопасти, которая предложена в настоящем документе, может быть использована для ветровых турбин, имеющих постоянный или переменный угол установки лопасти ротора. Способ также может быть использован для ветровых турбин, лопасти ротора которых регулируются по-отдельности.
Следовательно, предложено, чтобы бесконтактное измерительное устройство было сначала размещено перед ветровой турбиной и, соответственно, выровнено с ветровой турбиной. На следующем этапе, азимутальное положение ветровой турбины выравнивается относительно измерительного устройства. Таким образом, выполняется выравнивание азимутального положения гондолы, на которой смонтирован ротор с возможностью вращения. Это выравнивание производится, в частности, таким образом, что плоскость ротора выравнивается перпендикулярно относительно оптической оси между измерительным устройством и ветровой турбиной, в частности, средней точкой башни или мачты ветровой турбины. Плоскость ротора, в этом случае, является плоскостью, в которой перемещаются лопасти ротора, или, по меньшей мере, плоскостью, в которой выполняется перемещение кончиков лопастей из лопастей ротора, если это является случаем, в котором лопасти ротора не перемещаются точно в плоскости вследствие изгиба и/или наклона. Этот правильный угол между плоскостью ротора и оптической осью также должен пониматься в смысле горизонтального представления. В этом случае, предполагается наличие вертикальной плоскости ротора. Альтернативно, если плоскость ротора имеет небольшой наклон, вследствие того, что ось ротора является точно горизонтальной, но имеет небольшой наклон, может быть рассмотрена прямая линия в плоскости ротора.
Если затем ветровая турбина выравнивается в этом смысле относительно измерительного устройства, а именно, в частности, с максимальной точностью, то ротор может вращаться вокруг оси ротора с целью выполнения измерений. В этом случае, затем выполняется взятие замеров и фиксация профиля лопасти ротора посредством измерительного устройства на предварительно определенной высоте, то есть в предварительно определенном осевом положении лопасти ротора. Взятие замеров, в этом случае, производится таким образом, что расстояние от измерительного устройства до лопасти ротора измеряется непрерывно.
В этом случае, выравнивание измерительного устройства остается постоянным. Следовательно, профиль лопасти ротора дает в результате изменение расстояния относительно измерительного устройства, и это изменение расстояния, таким образом, представляет собой профиль лопасти ротора в соответствующем положении или высоту. В этом случае, это не весь профиль лопасти ротора, который зафиксирован в рассматриваемом положении, но только сторона лопасти ротора, которая обращена в направлении измерительного устройства. Однако этого достаточно для определения, в частности для вычисления, из него угла установки лопасти, что дает представление об известном профиле установленной лопасти ротора.
Предпочтительно азимутальное положение ветровой турбины выравнивается таким образом, чтобы измерение расстояния лопасти ротора производилось в первом и во втором положении с постоянной установкой азимута, где лопасть ротора в первом положении находится напротив второго положения. Таким образом, первое и второе положения являются, в основном, зеркально-симметричными относительно друг друга, в случае вертикальной зеркальной плоскости симметрии. Например, первое положение может быть положением на 5 часов, а второе - положением на 7 часов, или наоборот. Аналогично возможны для первого и второго положения, или наоборот, положение на 4 часа и положение на 8 часов. Другим примером, который может быть представлен, является положение на 2 часа и положение на 10 часов. Эти положения являются просто примерами и предпочтительно предложены положения на 3 часа и положение на 9 часов, то есть так, чтобы для выравнивания ветровой турбины лопасть ротора являлась горизонтальной в каждом из двух положений. Таким образом, измерение расстояния выполняется от измерительного устройства до предварительно определенной точки на лопасти ротора, когда последняя находится в первом положении. Затем, лопасть ротора перемещается в противоположное положение, то есть во второе положение, посредством вращения ротора. Затем выполняется второе измерение расстояния, от измерительного устройства до предварительно определенной точки на лопасти ротора, которая находится теперь во втором положении. Если два измерения расстояния дают одинаковое значение, то это означает, что плоскость ротора расположена перпендикулярно относительно оптической оси измерительного устройства относительно башни. Затем выполняется выравнивание ветровой турбины относительно ее азимутального положения, точно относительно измерительного устройства, азимутальное положение затем не изменяется для последующего измерения, и, таким образом, ветровая турбина закрепляется в этом азимутальном положении. Затем выполняется вращение ротора для взятия замеров по меньшей мере одной лопасти, или лопастей, в целях измерения профиля и определения угла. Тогда этот угол является абсолютным углом, в связи с тем, что нет никакой регулировки по азимуту и, следовательно, также нет никакой потребности в изъятии последнего из процесса вычислений. Соответственно, затем также возможно выполнить выравнивание, посредством любых установочных устройств, в целях регулирования каждой лопасти ротора относительно ее угла атаки. В конечном счете, установочное устройство каждой лопасти ротора, если имеется такое установочное устройство, может, соответственно, устанавливать правильный угол установки лопасти ротора.
Предпочтительно предварительно определенная точка на лопасти ротора, в направлении которой выполняется измерение расстояния для выравнивания ветровой турбины, расположена приблизительно в центре лопасти ротора, в осевом направлении лопасти, в частности в диапазоне приблизительно от 40 до 60% длины лопасти ротора, при измерении от области основания в ступице и до кончика его лопасти.
Это позволяет достигать высокой степени точности выравнивания в связи с тем, что имеется очень большое расстояние между этой предварительно определенной точкой, при нахождении в первом положении, и той же самой предварительно определенной точкой при нахождении во втором положении и, следовательно, даже небольшая регулировка азимута, в виде небольшого угла азимутального положения, дает в результате большое изменение расстояния в этой предварительно определенной точке в каждом случае. В то же время не допускается помещение такой точки измерения слишком близко к кончику лопасти ротора для устранения или, по меньшей мере, нахождения в узких пределах любых погрешностей, получающихся в результате изгиба лопасти ротора. В этом случае принимается во внимание, что любой, даже если небольшой, изгиб лопасти ротора является более заметным, как, например, отклонение лопасти ротора, в области законцовки лопасти. Для точки, расположенной приблизительно в центре лопасти ротора, в осевом направлении, в данном случае может игнорироваться любое отклонение.
Согласно одному варианту осуществления предлагается, чтобы взятие замеров производилось на одном или более сечениях профиля соответствующей лопасти ротора. Следовательно, взятие замеров лопасти ротора выполняется по меньшей мере в одном осевом положении, а именно перпендикулярно относительно осевой протяженности лопасти ротора. Это следует понимать как означающее взятие замеров сечения профиля, поскольку это взятие замеров выполняется перпендикулярно относительно продольной протяженности лопасти ротора в этом положении, выполняется фиксация сечения блока лопасти ротора в этом положении, которое показывает профиль лопасти ротора в этом сечении, где оно обозначается в качестве сечения профиля. В дополнение к взятию замеров сечения профиля, могут быть выполнены замеры дополнительного сечения профиля в другом осевом положении на лопасти ротора, чтобы, тем самым, минимизировать любые ошибки. Предпочтительно выполняются замеры двух, трех или более сечений профиля соответствующей лопасти ротора. В этом случае, взятие замеров выполняется для одного и того же сечения профиля, соответственно, каждой лопасти ротора ветровой турбины.
Эффективная конструкция предлагает, чтобы измерительное устройство было расположено на расстоянии от ветровой турбины. Предпочтительно используется оптическое измерительное устройство, в частности лазерное измерительное устройство. Измерительное устройство расположено на расстоянии от ветровой турбины, например, относительно основания башни ветровой турбины, которая соответствует, по меньшей мере, высоте ветровой турбины. В данном случае, высота ветровой турбины понимается как означающая высоту оси ротора над уровнем земли. Если имеет место случай, в котором ось ротора имеет небольшой уклон, то высота оси ротора в области ступицы ротора предпочтительно принимается в качестве базиса. Предпочтительно выбирать в качестве расстояния по меньшей мере двойную высоту ветровой турбины, и более предпочтительно выбирать в качестве расстояния по меньшей мере тройную высоту ветровой турбины. Это приводит к тому, что направление оптической оси от измерительного устройства не является слишком наклонным и, следовательно, находится под подходящим углом относительно лопасти ротора, взятие замеров для которой будет выполняться в каждом случае.
Предпочтительно измерительное устройство для взятия замеров лопасти ротора с целью фиксации профиля лопасти ротора выполняется при помощи того же самого измерительного устройства, которое было использовано ранее для выравнивания азимутального положения ветровой турбины. Таким образом, это измерительное устройство для измерения расстояния может быть использовано для взятия замеров лопасти ротора и выравнивания ветровой турбины.
Предпочтительно работа по взятию замеров и фиксации профиля лопасти ротора, или ее части, выполняется в процессе вращения ротора, в частности, когда рассматриваемая лопасть ротора проходит перед башней в результате вращения ротора, причем непрерывное измерение расстояния, в частности, производится в целях фиксации профиля или его части. Следовательно, в ходе взятия замеров измерительное устройство может быть выровнено с точкой, и это выравнивание может сохраняться во время измерения. Затем, лопасть ротора, в основном, вращается рядом с измерительным устройством или рядом с неподвижной точкой измерения, тем самым позволяя производить взятие замеров вдоль сечения профиля. Предпочтительное измерение в положении, в котором лопасти ротора проходят перед башней в результате вращения ротора, таким образом, дает в результате измерение, производимое, по существу, при нахождении лопасти ротора в вертикальном положении, посредством чего получается особенно подходящий угол относительно измерительного устройства, расположенного на земле перед ветровой турбиной. Кроме того, в этом положении имеется наименьшая сила ветра, которая должна приниматься во внимание, в связи с тем, что лопасть ротора находится в нижнем положении, и в связи с тем, что сама башня создает определенную ветровую тень, или понижение скорости ветра, в ее передней части. Тогда может выполняться непрерывное измерение посредством измерительного устройства для выполнения измерения профиля с максимальной точностью и, следовательно, для обеспечения возможности максимально точного вычисления определяемого угла установки лопасти ротора. Предпочтительно выполняется цифровое измерение и/или цифровая оценка, и в этом смысле непрерывное измерение также понимается как означающее измерение, которое производит взятие замеров с высокой скоростью взятия замеров. В этом смысле, непрерывное измерение также включает в себя цифровое измерение.
Предпочтительно выравнивание азимутального положения ветровой турбины производится многократно. С этой целью, сначала выполняется измерение расстояния лопасти ротора в первом положении и лопасти ротора во втором положении с постоянной установкой азимута. В этом случае, азимутальное положение является постоянным или, по меньшей мере, производится отслеживание для гарантии того, что нет никакого изменения азимутального положения и что азимутальное положение является одинаковым для обоих положений.
На следующем этапе выполняется регулирование азимутального положения ветровой турбины, если расстояния для двух положений относительно измерительного устройства были различными. Затем, продолжается повторение измерения расстояний и регулирования, пока расстояния для двух положений не становятся равными, что также включает в себя случай, в котором расхождения ниже предельного допуска. Указано, что, в принципе, измерение этих двух положений также может быть выполнено с использованием отличающихся лопастей ротора с целью выравнивания ветровой турбины. В этом случае, например, измерение может быть произведено без вращения ротора, если, например, одна лопасть ротора находится в положении на 4 часа, а другая лопасть ротора находится в положении на 8 часов, в случае рассмотрения ротора, имеющего три лопасти ротора. Однако в этом случае существует проблема гарантии того, что измерение фактически производится в одной и той же точке для каждой из двух лопастей ротора, в частности, в том же самом осевом положении лопасти ротора. Одна возможность решения этой проблемы будет заключаться в том, чтобы заранее указывать, например до установки лопастей ротора, одну или более таких точек измерения расстояния на лопасти ротора или, по меньшей мере, обеспечивать маркировку таким образом, чтобы измерительное устройство могло идентифицировать такую точку. Тогда измерение расстояний может быть выполнено без вращения ротора.
Согласно предпочтительному варианту осуществления предлагается, чтобы фиксация угла установки лопасти выполнялась при работе ветровой турбины в рабочей точке и/или диапазоне рабочих режимов, в котором не производится регулирование угла атаки лопасти турбины, в частности, чтобы ветровая турбина в этом случае работала с частичной нагрузкой.
Диапазон рабочих режимов означает, в частности, диапазон скоростей вращения и/или выходной диапазон.
Предпочтительно фиксация угла установки лопасти производится, когда ветровая турбина работает в рабочей точке и/или диапазоне рабочих режимов, причем, в данном случае, в случае ветровой турбины, которая может устанавливать угол установки лопасти ротора, выбирается рабочая точка или рабочая область, в которой не выполняется никакого регулирования угла атаки лопасти турбины, в частности в этом случае ветровая турбина работает при таких низких скоростях ветра, при которых она работает в диапазоне частичных нагрузок. Вследствие этого, измерение легко производится в любом случае после выравнивания азимутального положения ветровой турбины по время вращения ротора, приводимого в действие посредством ветра. Альтернативно, предлагается выборочное вращение ротора в том смысле, чтобы генератор ветровой турбины работал с приводом от двигателя.
Также, согласно изобретению предлагается измерительное приспособление, предназначенное для фиксации угла установки лопасти для одной или более лопастей ротора для ротора ветровой турбины по п. 9. Такое измерительное приспособление, в дополнение к тому, что оно содержит ветровую турбину, содержит измерительное устройство, в частности оптическое измерительное устройство, которое располагается на земле перед ветровой турбиной и выравнивается. Измерительное приспособление сконфигурировано для выполнения по меньшей мере одного способа согласно одному из ранее объясненных вариантов осуществления.
В целях выравнивания измерительного устройства, в частности также в целях выравнивания измерительного устройства, для производства вышеописанного выравнивания азимутального положения ветровой турбины, измерительное приспособление, в частности измерительное устройство, содержит, согласно одному варианту осуществления, оптический визир, который позволяет выполнять выборочное выравнивание с определенной точкой на лопасти ротора в предварительно определенном положении. В частности, разработан такой оптический визир, и он подходит для выравнивания измерительного устройства с маркировкой на лопасти ротора во время остановки лопасти ротора.
Ниже более подробно иллюстративно описано изобретение на основе иллюстративных вариантов осуществления и со ссылкой на сопроводительные чертежи.
Фиг. 1 иллюстрирует измерительное приспособление, содержащее ветровую турбину и измерительное устройство.
Фиг. 2 схематично иллюстрирует взятие замеров сечения профиля лопасти ротора в процессе движения лопасти ротора.
Фиг. 3 схематично иллюстрирует ветровую турбину, азимутальное положение которой не выровнено.
Фиг. 4 иллюстрирует ветровую турбину, азимутальное положение которой выровнено.
Фиг. 5 иллюстрирует, на горизонтальной проекции, углы, которые рассматриваются в соответствии с изобретением.
Фиг. 1, на схематичном виде сбоку, иллюстрирует ветровую турбину 1 и измерительное устройство 2, которые вместе, по существу, составляют измерительное приспособление из варианта осуществления. Ветровая турбина 1 имеет башню 4, которая имеет центральную ось 6 башни и на которой расположена гондола 8, которая содержит ротор 10. Ротор 10 смонтирован таким образом, чтобы иметь возможность вращения вокруг оси 12 ротора, которая является, по существу, горизонтальной. Ротор 10, в этом случае, имеет ступицу, содержащую обтекатель 14, на котором расположены три лопасти 16 ротора. Одна лопасть ротора указывает вниз и, таким образом, находится в положении на 6 часов, а две другие лопасти 16 ротора указывают наклонно вверх и находятся в положениях на 10 часов и 2 часа соответственно.
Измерительное устройство 2 выровнено, приблизительно, с центральной областью нижней лопасти 16 ротора, как обозначено посредством оптической линии 18, которая также представляет лазерный луч для выполнения оптического измерения на лопасти 16 ротора. В этом случае, измерительное устройство 2 находится на земле, перед ветровой турбиной, на расстоянии, приблизительно вдвое превышающем высоту ветровой турбины 1 относительно оси 12 ротора.
Как обозначено только для нижней лопасти 16 ротора на Фиг. 1, каждая из лопастей 16 ротора имеет комель 20 лопасти, для крепления к ступице или обтекателю 14, и законцовку 22 лопасти. Фиг. 1 иллюстрирует схему размещения трех лопастей 16 ротора, в которой, в целях иллюстрации, две лопасти 16 ротора, представленные сверху, также изображены как имеющие некоторый наклон относительно друг друга, для представления их более видимыми. В случае точного бокового представления ветровой турбины 1 и, следовательно, ротора 10 сверху будет видна только одна лопасть ротора.
Фиг. 2, в качестве представления принципа, изображает горизонтальное представление сечения 26 профиля лопасти 16 ротора в виде горизонтальной проекции в отношении схемы размещения на Фиг. 1. Однако, для большей ясности, для Фиг. 2 и Фиг. 1 были выбраны другие соотношения размеров. В данном случае было выполнено сечение профиля в положении на продольной оси лопасти 16 ротора, на уровне точки 24 взятия замеров, которая, в целях иллюстрации, также обозначена на Фиг. 1, а именно точки, в которой оптическая линия 18, или лазерный луч 18 для взятия замеров, пересекается с лопастью 16 ротора.
Фиг. 2 также иллюстрирует два сечения 26' профиля, представленные посредством пунктирных линий, и которая изображает сечение 26 профиля и, таким образом, лопасть 16 ротора в других положениях вследствие движения лопасти 16 ротора. В данном случае обозначено направление 28 движения. В сущности, направление 28 движения лежит в плоскости ротора из ротора 10.
Оптическая линия 18 перпендикулярна направлению 28 движения.
Вследствие движения лопасти 16 ротора, измерительное устройство 2, таким образом, может выполнять взятие замеров сечения 26 профиля, по меньшей мере, стороны сечения 26 профиля, обращенной к измерительному устройству 2. Таким образом, эта часть сечения 26 профиля фиксируется, и, таким образом, положение сечения 26 профиля, и, таким образом, лопасти 16 ротора относительно направления 28 движения, и, таким образом, выполняется фиксация относительно плоскости ротора.
Выравнивание 30, которое может быть, например, хордой сечения 26 профиля, ставится в соответствие с сечением 26 профиля или, в данном случае, с лопастью 16 ротора. В этом смысле, в данном случае в целях объяснения иллюстративно используется хорда 30, несмотря на то, что прямая линия также может быть определена как линия выравнивания. Следовательно, положение сечения профиля и, таким образом, положение выравнивания 30, а именно хорда 30, известны, то есть в отношении плоскости ротора или направления 28 движения от выбранного сечения 26 профиля или от его части, до которой берутся замеры. Оно может быть обозначено посредством угла α, который изображен в настоящем документе как угол между направлением 28 движения и линией 30 выравнивания или хордой 30.
Определение угла α установки лопасти, то есть угла между линией 30 выравнивания и направлением 28 движения и, таким образом, угла между линией 30 выравнивания 30 или хордой 30 и плоскостью ротора данном случае вычисляется исходя из того, что оптическая линия 18 перпендикулярна плоскости ротора или перпендикулярна направлению 28 движения согласно представлению на Фиг. 2.
Для этой цели требуется выравнивание, которое, аналогично, может быть выполнено посредством измерительного устройства 2, как объяснено посредством Фиг. 3 и 4. Для этого, на Фиг. 3, в горизонтальной проекции иллюстрирована гондола 8, азимутальное положение которой еще не было выровнено. В целях фиксации, и, в конечном счете, для выполнения выравнивания измерительное устройство 2 в каждом случае фиксирует расстояние относительно лопасти 16 ротора, а именно в каждом случае, когда лопасть 16 ротора находится в горизонтальном положении. В случае положения лопасти 16 ротора, изображенного слева, которое может быть обозначено как первое положение, расстояние A относительно измерительного устройства 2 измеряется до точки 32 измерений на лопасти 16 ротора. Когда лопасть 16 ротора находится справа в горизонтальном положении, которое может быть обозначено как второе положение, расстояние B измеряется до той же самой точки 32 измерений.
Из Фиг. 3 совершенно очевидно, что расстояние B больше, чем расстояние A. Соответственно, должно быть отрегулировано азимутальное положение гондолы. Следовательно, плоскость ротора, которая также может быть обозначена как плоскость лопасти ротора, все еще не перпендикулярна оптической линии 18.
Просто в целях предосторожности, в настоящем документе указано, что, несмотря на использование одинаковых ссылочных обозначений на каждой из Фиг. 1-5, элементы или отношения размеров, которые присутствуют или изображены, не всегда точно абсолютно одинаковы. Чертежи предназначены для целей иллюстрации.
Фиг. 4 изображает, в основном, ту же самую ситуацию, что и на Фиг. 3, за исключением того, что расстояния A и B теперь равны (и, в этом смысле, значения A и B на Фиг. 4 не равны расстояниям A и B Фиг. 3). Теперь, выполняется выравнивание азимутального положения ветровой турбины, а именно гондолы 8, относительно измерительного устройства 2, и плоскость ротора перпендикулярна оптической линии 18. Следовательно, согласно горизонтальному представлению из Фиг. 4, оптическая линия 18 и ось 12 ротора совпадают. Теперь, азимутальное положение может быть зажато, в частности закреплено неподвижно, и теперь может быть выполнено взятие замеров лопасти 16 ротора, объясненное со ссылкой на Фиг. 1 и 2.
Фиг. 5 объясняет выравнивание между оптической осью 18 и плоскостью 34 ротора в отношении горизонтальной проекции согласно Фиг. 4. Следовательно, имеется правильный угол между плоскостью 34 ротора и оптической линией 18. Просто в целях предосторожности, указано, что очевидно на боковой проекции, такой как изображенная посредством Фиг. 1, не должно быть правильного угла между оптической линией 18 и плоскостью ротора. Обычно, здесь также не будет правильного угла, если измерительное устройство 2 не будет расположено в таком высоком положении, что оптическая линия, то есть, в частности, лазерный луч, пересекает плоскость 34 ротора точно под прямым углом.
Следовательно, может быть определен зафиксированный угол α установки лопасти 16 ротора или сечения 26 профиля относительно плоскости ротора 34, если между оптической линией 18 и плоскостью ротора 34 поддерживается угол в 90 градусов.
В иных случаях, в целях определения положения или относительного угла установки лопасти ротора из взятия замеров его поверхности или сечения профиля, выполняется ссылка на немецкий патент DE 100 323 14 C1. Несмотря на то что последний описывает вычисление угла из профиля, для которого были взяты замеры, теперь предлагается, чтобы абсолютный угол α установки лопасти, который выходит за пределы спецификаций относительного угла в отношении других лопастей ротора, определялся на основе максимально точного выравнивания по азимуту. С этой целью предложена наземная система измерения, в частности наземное измерительное устройство 2, которое точно выровнено с ветровой турбиной, а именно, в частности, со средней точкой башни. Кроме того, предложено точное выравнивание по азимуту ветровой турбины для того, чтобы абсолютный угол α установки лопастей затем мог быть определен из выполненного измерения. В этом случае, предложенное выравнивание азимутального положения гондолы не зависит ни от каких значений положения из системы регулирования азимута, которые, вообще при наличии таковых, подвергаются воздействию погрешности, но предлагают удобную систему и способ, который может быть точно выполнен, и в котором может использоваться наземный датчик измерения или наземное измерительное устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2013 |
|
RU2617312C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ ИЛИ ВЕТРОВОЙ ЭЛЕКТРОСТАНЦИЕЙ | 2013 |
|
RU2591366C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ ЭКСПЛУАТАЦИИ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2013 |
|
RU2617529C2 |
| ДВУХРОТОРНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2014 |
|
RU2574194C1 |
| ВЕТРОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2564734C2 |
| ГОНДОЛА ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2012 |
|
RU2596414C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2011 |
|
RU2553846C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА С НИЗКИМИ ЭЛЕКТРОМАГНИТНЫМИ ПОМЕХАМИ | 2018 |
|
RU2739513C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ И КОЛЕБАНИЙ ПОДВИЖНЫХ СТРУКТУР | 2014 |
|
RU2636412C2 |
| СПОСОБ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2005 |
|
RU2350778C2 |


Изобретение относится к способу фиксации угла (α) установки лопасти для лопасти (16) ротора для ротора (10). Способ фиксации угла (α) установки лопасти для лопасти (16) ротора для ротора (10) ветровой турбины (1), содержит этапы, на которых располагают и выравнивают бесконтактное измерительное устройство (2) напротив ветровой турбины (1), выравнивают азимутальное положение ветровой турбины (1) относительно измерительного устройства (2), выполняют вращение ротора (10) ветровой турбины (1), берут замеры и фиксируют профиль (26) лопасти (16) ротора, или его части, на предварительно определенной высоте посредством бесконтактного измерительного устройства (2) и определяют угол (α) установки лопасти для лопасти (16) ротора из данных, записанных во время взятия замеров (26) профиля. Изобретение направлено на точную фиксацию угла установки лопасти. 2 н. и 8 з.п. ф-лы, 5 ил.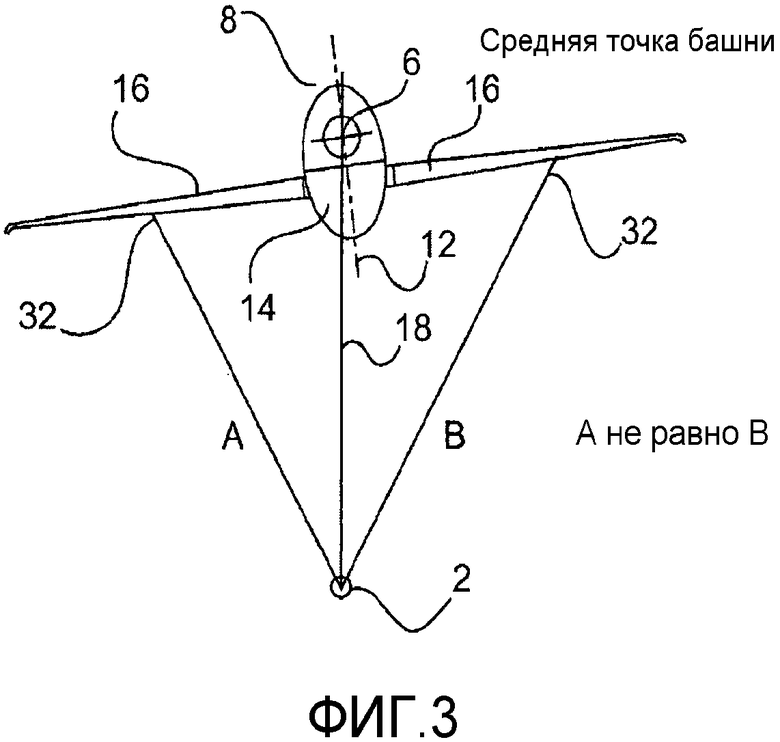
1. Способ фиксации угла (α) установки лопасти для лопасти (16) ротора для ротора (10) ветровой турбины (1), содержащий этапы, на которых
располагают и выравнивают бесконтактное измерительное устройство (2) напротив ветровой турбины (1),
выравнивают азимутальное положение ветровой турбины (1) относительно измерительного устройства (2),
выполняют вращение ротора (10) ветровой турбины (1),
берут замеры и фиксируют профиль (26) лопасти (16) ротора, или его части, на предварительно определенной высоте посредством бесконтактного измерительного устройства (2), и
определяют угол (α) установки лопасти для лопасти (16) ротора из данных, записанных во время взятия замеров (26) профиля.
2. Способ по п. 1, отличающийся тем, что
выравнивают азимутальное положение ветровой турбины (1) таким образом, что измерение расстояния от измерительного устройства до лопасти (16) ротора производится в первом и во втором положении с постоянной установкой азимута, где лопасть (16) ротора в первом положении находится напротив второго положения.
3. Способ по п. 2, отличающийся тем, что
когда выравнено азимутальное положение ветровой турбины (1), лопасть (16) ротора размещена приблизительно горизонтально в обоих положениях, а именно в первом положении - положении на 3 часа, и во втором положении - положении на 9 часов, или наоборот.
4. Способ по любому из пп. 1-3, отличающийся тем, что
оптическое измерительное устройство (2), в частности лазерное измерительное устройство (2), используется в качестве бесконтактного измерительного устройства (2), и взятие замеров (26) профиля лопасти (16) ротора и/или измерение расстояния от измерительного устройства до лопасти (16) ротора производится оптически посредством этого измерительного устройства (2).
5. Способ по любому из пп. 1-3, отличающийся тем, что взятие замеров производится на одном или более сечениях (26) профиля соответствующей лопасти (16) ротора.
6. Способ по любому из пп. 1-3, отличающийся тем, что
измерительное устройство (2) расположено на расстоянии от ветровой турбины (1), в частности на расстоянии, которое соответствует, по меньшей мере, высоте ветровой турбины (1), и предпочтительно по меньшей мере двум высотам, и, в частности, по меньшей мере трем высотам ветровой турбины (1).
7. Способ по любому из пп. 1-3, отличающийся тем, что
взятие замеров выполняется в процессе вращения ротора (10) и, в частности, во время прохождения рассматриваемой лопасти (16) ротора перед башней (4) в результате вращения ротора (10), где непрерывное измерение расстояния, в частности, производится в целях фиксации (26) профиля или его части.
8. Способ по любому из пп. 1-3, отличающийся тем, что
выравнивание азимутального положения ветровой турбины (1) производится многократно в том отношении, что
- сначала производится измерение расстояния лопасти (16) ротора в первом положении и лопасти ротора во втором положении с постоянной установкой азимута, и
- на следующем этапе выполняется регулировка азимутального положения ветровой турбины (1), если расстояния (А, В) двух положений были различными, и
- измерение и регулирование расстояния продолжает повторяться до выравнивания расстояний (А, В) в двух положениях.
9. Способ по любому из пп. 1-3, отличающийся тем, что
фиксация угла (α) установки лопасти выполняется, когда ветровая турбина (1) работает в рабочей точке и/или диапазоне рабочих режимов, в котором не производится регулирование угла атаки лопасти турбины, в частности ветровая турбина (1) в этом случае работает с частичной нагрузкой.
10. Измерительное приспособление, предназначенное для определения угла (α) установки лопасти для лопасти (16) ротора для ротора (10) ветровой турбины, содержащее измерительное устройство (2), в частности оптическое измерительное устройство (2), причем измерительное приспособление сконфигурировано для выполнения способа по любому из пп. 1-9.
| WO 2011161058 A1, 29.12.2011 | |||
| US 2012200699 A1, 09.08.2012 | |||
| DE 10032314 C1, 13.12.2001 | |||
| Высевающий аппарат | 1932 |
|
SU30874A1 |

