Изобретение относится к системе и способу контроля перемещении структуры.
Подвижные структуры, например здания или большие машины, могут, например, вследствие воздействий окружающей среды или вследствие собственных эксплуатационных движений подвергаться перемещениям или колебаниям, которые могут повредить структуру или препятствовать эксплуатации. Чтобы предотвратить повреждения, запланировать техническое обслуживание или оценить остаточный срок службы, такие перемещения могут подвергаться наблюдению и контролю.
Для контроля ветроэнергетических установок применяют известные датчики, например одноосные датчики ускорения на основе пьезоэлектрической технологии, тензометрические датчики, фотометрические системы или лазерные измерительные системы. Посредством этого могут анализироваться простые изменения положения и частоты корпусного шума, что обеспечивает возможность распознавания возможных повреждений на элементах установки, например на подшипниках, элементах передачи или лопастях винта.
Недостатком здесь является то, что измеренные значения регистрируют перемещение установки лишь по одной оси и лишь для выбранных мест измерения.
В WO 2012/049492 А1 раскрыта система для коррекции навигационной информации, полученной с помощью инерциальной системы, для навигации в навигационном поле. Для коррекции дрейфа в выходных данных инерциальных датчиков в системе используется информация, относящаяся к зданиям и/или другим деталям навигационного поля. В частности, для определения возможного направления перемещения пользователя системы при его нахождении внутри здания в системе используются четыре спеленгованных направления внешних стен здания. Указанная информация используется для коррекции дрейфа курса. Система включает стохастический фильтр, а именно фильтр Калмана, для обработки инерциальной информации и ее коррекции. Указанный фильтр Калмана также обеспечивает учет данных других навигационных датчиков, например GPS. Кроме того, система извлекает информацию пеленгации из аэрофотоснимков, например карт и фотограмметрических данных с использованием алгоритмов распознания краев и прямых линий.
В US 2009/326851 А1 раскрыт инерциальный измерительный блок, содержащий основание, имеющее множество физически различимых секторов, на котором расположены три группы ортогонально ориентированных датчиков угловых скоростей, при этом группы расположены на разных секторах основания. На основании также расположены три ортогонально ориентированных акселерометра для измерения больших значений ускорения, а также три ортогонально ориентированных акселерометра для измерения малых значений ускорения. На основании расположен процессор, содержащий резидентную часть программного обеспечения для приема сигналов от указанных трех групп датчиков угловых скоростей, трех ортогонально ориентированных акселерометров для измерения больших значений ускорения и трех ортогонально ориентированных акселерометров для измерения малых значений ускорения. Программное обеспечение находится в процессоре для подсчета полученных сигналов одного или более из группы: изменения наклона, изменения позиции, изменения угловой скорости, изменения линейной скорости и изменения ускорения блока в течение множества из конечных интервалов времени.
В WO 2013/110215 А1 раскрыт способ определения характеристик ветроэнергетической установки. Способ может включать получение сигналов от по меньшей мере одного микроинерциального измерительного блока (MIMU), расположенного на или в элементе ветроэнергетической установки, и определение по меньшей мере одной характеристики ветроэнергетической установки на основании полученных от по меньшей мере одного MIMU.
В DE 102006005258 А1 раскрыт способ определения нагрузок в механических структурах и/или повреждений или состояний механической структуры, вызванных нагрузками в механической структуре. Повороты части механической структуры, которые вызываются нагрузкой/повреждением механической структуры измеряются с использованием оптоволоконного датчика вращения, который механически жестко присоединен к части структуры, и на основании измеренного вращения выводятся нагрузки/повреждения механической структуры.
В источнике «Контроль состояния и определение повреждений ветроэнергетических установок и связанные с этим алгоритмы. Обзор», 3. Хамид и др. (Обзоры в области возобновляемых и устойчивых источников энергии, изд. Эльзевир, Нью-Йорк, т. 13, номер 1, стр. 1-39) описаны различные подходы к контролю ветроэнергетических установок и их выходным производительности.
В основе изобретения лежит задача предложить систему и способ контроля перемещений структуры, которые дают возможность эффективного и надежного контроля структуры и предоставляют основание для мероприятий по ремонту, планированию технического обслуживания и/или оценки остаточного срока службы элементов структуры.
Эта задача решена при помощи системы по п. 1 для контроля перемещений структуры и при помощи предложенного в еще одном независимом пункте способа контроля перемещений структуры. Варианты реализации содержатся в зависимых пунктах.
Система для контроля перемещений структуры содержит по меньшей мере одно закрепленное на структуре инерциальное измерительное устройство для регистрации мгновенных угловых скоростей и значений ускорения в неподвижной относительно Земли инерциальной системе координат. Кроме того, система содержит центральный модуль для определения контролируемого значения на основании мгновенных угловых скоростей и значений ускорения при помощи навигационного алгоритма и выходной модуль для выдачи контролируемого значения.
Структурой может быть произвольный предмет, который может подвергаться перемещениям и/или колебаниям посредством внешних воздействий (воздействий окружающей среды) или внутренних воздействий (режима эксплуатации). Речь может идти, например, о здании, в частности высотном здании или башенной опоре линии электропередач, или о машине, в частности строительной машине, кране или тому подобном. Кроме того, речь может идти также о структурах, которые сооружены по типу здания и эксплуатируются по типу машины, например колесо обозрения, плавучая буровая установка или ветроэнергетическая установка.
С одной стороны, такие структуры могут подвергаться перемещениям посредством воздействий окружающей среды, например ветра, морского течения, ударов волн или перемещений поверхности земли, например при землетрясении. С другой стороны, такие структуры могут также подвергаться перемещениям посредством собственных эксплуатационных движений, например посредством рабочих перемещений элемента структуры, колебаний привода или передачи. Кроме того, могут иметь место взаимодействия между воздействиями окружающей среды и внутренними перемещениями структуры, которые приводят к сложному характеру перемещения.
Такие перемещения и колебания могут повредить структуру и могут привести к усталости материала, например к усталостным трещинам или изломам. Кроме того, они могут оказывать влияние на режим эксплуатации структур и при этом ограничивать их сферу применения или эксплуатационную эффективность.
Кроме того, возможно, что структура изменяется с течением времени, например вследствие старения, износа, структурных повреждений, механических повреждений или воздействий окружающей среды. Например, в комплексных подвижных структурах, в частности ветроэнергетических установках, может произойти отложение льда на лопастях винта или скапливание воды в них. Вследствие нагрузок и усталости материала могут меняться его свойства. Элементы структуры могут становиться более мягкими или приобретать трещины. Такие изменения структуры находят свое отражение в характере перемещения структуры. Например, вследствие этого могут изменяться частоты или амплитуды колебаний или перемещений. Изменения могут регистрироваться на основании мгновенных угловых скоростей и значений ускорения, измеренных при помощи инерциального измерительного устройства. Это обеспечивает возможность распознавать необходимость мероприятий, например, для технического обслуживания, поддержания в исправном состоянии или для эксплуатации и произвести эти мероприятия, прежде чем произойдут значительные повреждения.
Таким образом, контроль перемещений структуры напрашивается как на основании эксплуатационной надежности, так и на основании эксплуатационной эффективности.
Для контроля перемещений на структуре или же на одном элементе структуры могут закреплять одно или несколько инерциальных измерительных устройств, которые обеспечивают возможность регистрировать возникающие на местах закрепления мгновенные угловые скорости и значения ускорения по отношению к неподвижной относительно Земли инерциальной системе координат. Для этого могут применяться системы с инерциальными датчиками (датчиками ускорения и мгновенной угловой скорости) типов MEMS (микроэлектромеханические системы) и/или FOG IMU (инерциальные измерительные модули с оптоволоконными гироскопами).
Зарегистрированные значения ускорения и мгновенные угловые скорости могут передаваться на центральный модуль, например, через беспроводную или кабельную сеть для однонаправленной или двунаправленной коммуникации.
В центральном модуле на основании измеренных мгновенных угловых скоростей и значений ускорения при помощи навигационного алгоритма, например при помощи непрерывного интегрирования или же суммирования измеренных мгновенных угловых скоростей и ускорений, могут определяться скорости и угловые скорости, а также ориентация и положение инерциального измерительного устройства в пространстве.
При этом могут применяться классические навигационные алгоритмы, которые, например, известны в области навигации автомобилей, судов и/или летательных аппаратов, например, с компенсацией зарегистрированных мгновенных угловых скоростей и ускорений по принципу Шулера.
На основании измеренных мгновенных угловых скоростей и значений ускорения, рассчитанных (угловых) скоростей, ориентации и/или положения могут регистрироваться и контролироваться перемещения структуры. В частности, могут определяться имеющие место на местах измерений перемещения, колебания и отклонения.
Кроме того, на основании этого может определяться контролируемое значение. Контролируемое значение может, например, включать измеренную мгновенную угловую скорость, измеренное значение ускорения, рассчитанную (угловую) скорость, ориентацию и/или положение, или определенное с их помощью дополнительное значение, например частоту перемещения и/или амплитуду перемещения, скручивание и/или отклонение.
Контролируемое значение может передаваться на выходной модуль при помощи беспроводной или кабельной коммуникации. В простейшем случае выходной модуль может содержать монитор для вывода и контролируемого значения или же его характеристики, а также дополнительные компоненты, например запоминающее устройство для данных с целью сбора и записи изменения контролируемого значения в течение времени. В качестве варианта или дополнительно выходной модуль может иметь комплексную систему предупреждения и тревоги.
Кроме того, возможно соединение выходного модуля по типу регулирующей системы с исполнительными элементами структуры. В этом случае в зависимости от контролируемого значения на исполнительные элементы может передаваться управляющая информация, например управляющие параметры. Например, в случае контроля ветроэнергетической установки можно регулировать положение лопастей винта в зависимости от контролируемого значения, которое дает возможность определять прогиб лопастей винта, чтобы избежать их чрезмерной нагрузки.
На основании контролируемого значения, а также дополнительной контролируемой информации можно сделать заключения о перемещениях и колебаниях структуры, и таким образом, например, заключения о возможном неправильном функционировании, усталости или повреждениях. Это, например, обеспечивает возможность оценки остаточной долговечности структуры или же ее компонентов и может применяться в качестве основания для планирования технического обслуживания. Такие оценки полезны, в частности, при контроле структур с затрудненной доступностью (например, удаленные ветроэнергетические установки) и для машин с высокой загрузкой (прессы большого прессового цеха), для которых каждое техническое обслуживание сопряжено с высокими затратами. Кроме того, такие показатели важны с точки зрения требований безопасности, так как непрерывный контроль регулярно записывается, и потребность в техническом обслуживании незамедлительно отображается.
В одном варианте выполнения инерциальное измерительное устройство содержит три датчика мгновенной угловой скорости, соответственно с линейно независимыми друг от друга и/или ортогональными друг другу осями регистрации, а также три датчика ускорения, соответственно с линейно независимыми друг от друга и/или ортогональными друг другу направлениями регистрации.
Например, датчики мгновенной угловой скорости могут иметь три ортогональные друг другу оси x, у и z регистрации, которые соответствуют направлениям регистрации датчиков ускорения. При помощи датчиков мгновенной угловой скорости (гироскопических датчиков) может быть рассчитано вращательное перемещение, в то время как при помощи датчиков ускорения (поступательных датчиков) может быть рассчитано поступательное перемещение. Следовательно, могут быть определены произвольные перемещения инерциального измерительного устройства в соответствии с шестью степенями свободы.
В одном варианте выполнения центральный модуль выполнен с возможностью определять и/или корректировать ошибку измерения инерциального измерительного устройства на основании заданного структурой краевого условия.
В частности, классическая инерциальная навигация, начиная от заданного начального положения, подвержена непрерывному возрастанию ошибки ориентации или же положения, которое получается вследствие накапливающегося интегрирования или же накапливающегося суммирования возможных ошибок или неточностей измерений (например, ошибки нулевой точки) инерциальных датчиков (датчиков мгновенной угловой скорости и датчиков ускорения). Это возрастание обозначают как дрейф.
Чтобы ограничить или компенсировать дрейф позиции и расположения и тем самым также контролируемого значения, при применении навигационного алгоритма могут учитываться условия и требования стабильности, которые имеют место в структуре. Эти требования могут, например, приниматься в форме краевых условий навигации. Следовательно, навигационный алгоритм может поддерживаться этими условиями и требованиями. Ошибка в результате расчетов или же ошибка контролируемого значения может на этом основании оцениваться и/или компенсироваться.
Учет краевых условий может в простейшем случае включать сравнение краевого условия (например, известного географического положения структуры) с рассчитанными значениями (скоростью, угловой скоростью, положением и ориентацией). На основании этого может быть оценена ошибка (например, ошибка нулевой точки) инерциального измерительного устройства (датчиков мгновенной угловой скорости и датчиков ускорения), и точность измерения может непрерывно улучшаться. Учет, например, нескольких или сложных краевых условий может быть реализован в навигационном алгоритме при помощи фильтра Кальмана.
В следующем варианте выполнения центральный модуль может быть выполнен с возможностью определять краевые условия, а именно, на основании по меньшей мере одной информации из группы, включающей по существу стационарное положение структуры, определенное на основании спутникового сигнала позиционирования положение по меньшей мере одного элемента структуры, ограничение степени свободы перемещения по меньшей мере одного элемента структуры, угол наклона по меньшей мере одного элемента структуры, среднее значение (например, заданное или определяемое из измеренных значений или рассчитанных значений) перемещения по меньшей мере одного элемента структуры и/или инерциального измерительного устройства, и воздействующие на структуру скорость ветра, направление ветра, скорость течения, направление течения и/или направление ударов волн.
Следовательно, имеющиеся условия структуры и ее расположение в окружающей среде, а также любые сведения об условиях окружающей среды могут применяться для того, чтобы поддерживать навигационный алгоритм или же чтобы исключать или корректировать дрейф координат или ориентации.
Такие краевые условия неизвестны в классической сухопутной транспортной навигации, так как на сухопутных транспортных средствах они в общем случае отсутствуют. Поэтому в рамках классической автомобильной навигации их не применяют для коррекции ошибок или же устранения дрейфа. Однако при контроле подвижных структур, которые, например, могут быть расположены стационарно, такие условия могут иметь место и могут использоваться для корректировки ошибок.
Улучшенные при помощи краевых условий оценка и корректировка ошибок обеспечивают возможность отображать или же рассчитывать определенные значения с более высокой точностью, или альтернативно применять менее дорогостоящие, но более подверженные дрейфу инерциальные измерительные устройства, так как возникающие в них ошибки возможно оценить и скорректировать.
В частности, здания и/или большие установки, такие как ветроэнергетические установки, или плавучие буровые установки или другие, зачастую установлены стационарно, то есть в неподвижной точке в неподвижной относительно Земли инерциальной системе координат. Для этих установок возможна поддержка навигационного алгоритма при помощи краевых условий.
Соответствующая поддержка возможна также для нестационарных структур, если может использоваться сигнал положения, чтобы определить положение структуры. Например, может применяться приемник глобальной системы спутниковой навигации (GNSS), чтобы принимать и анализировать спутниковый сигнал с целью определения положения, например приемник GPS, GLONASS, Compass или Galileo. Альтернативно для определения положения может применяться также другой, например, локальный оптический сигнал позиционирования или оптический способ распознавания, который анализирует зарегистрированное камерой изображение. Определенное таким образом положение может использоваться, чтобы распознавать и корректировать дрейф датчиков, ошибку рассчитанных значений положения и ориентации или систематическую ошибку контролируемого значения.
Краевое условие может быть также задано путем ограничения степени свободы перемещения по меньшей мере одного элемента структуры. Например, при вращении и/или колебании лопасти винта положение вдоль лопасти винта и тем самым, например, расстояние точки по отношению к ступице едва ли изменяется. Следовательно, перемещения этой точки подвержены ограничению степени свободы посредством фиксации лопасти винта на втулке. Это ограничение может применяться в качестве краевого условия, чтобы, например, распознавать или же корректировать систематическую ошибку измерения датчиков.
Кроме того, в качестве краевого условия также может быть задан угол наклона по меньшей мере одного элемента структуры. Например, наклон башни ветроэнергетической установки может приводить к смещению положения инерциального измерительного устройства, расположенного в гондоле ветроэнергетической установки. Если для поддержки навигационного алгоритма регистрируют лишь известное стационарное положение структуры, то поступательное перемещение инерциального измерительного устройства при необходимости рассчитывают как дрейф положения, и возможный критический наклон башни не распознается. Однако с учетом угла наклона дрейф положения и наклон могут распознаваться и отдельно контролироваться или же корректироваться.
Кроме того, краевое условие может определяться на основании среднего значения перемещения по меньшей мере одного элемента структуры и/или инерциального измерительного устройства. Например, возможно, что элемент структуры, на котором закреплено инерциальное измерительное устройство, подвергается колебаниям, например, вследствие ветровой нагрузки или ударов волн. Колебания изменяют положение инерциального измерительного устройства и распознаются как ускорение. Чтобы, тем не менее, иметь возможность распознавать ошибку нулевой точки или же систематический дрейф инерциального измерительного устройства, среднее значение перемещения может быть зафиксировано в течение заданного интервала времени и применяться в качестве краевого условия для определения и корректировки ошибки измерения, например, на основе фильтра Кальмана.
Кроме того, краевое условие может также определяться на основании влияющего на структуру воздействия окружающей среды. В частности, воздействия окружающей среды, например скорость ветра, направление ветра, скорость течения, направление течения и/или направление ударов волн, например, в удаленных ветроэнергетических установках или плавучих буровых установках, могут привести к перемещениям и/или колебаниям ветроэнергетической установки или плавучей буровой установки, которые измеряются посредством закрепленного на них инерциального измерительного устройства. Поэтому такие воздействия окружающей среды влияют на определение положения и ориентации структуры и могут смешиваться с ошибкой нулевой точки, то есть систематическим дрейфом инерциального измерительного устройства. Однако если в рамках коррекции ошибки учитывают определенное на основании воздействий окружающей среды краевое условие, то коррекция ошибки так же возможна, как и распознавание перемещения положения или же ориентации инерциального измерительного устройства.
В следующем варианте выполнения система имеет множество закрепленных на структуре инерциальных измерительных устройств, при этом центральный модуль выполнен с возможностью определять контролируемое значение на основании относительного перемещения соответственно между двумя из нескольких инерциальных измерительных устройств.
Благодаря применению нескольких инерциальных измерительных устройств возможно измерение перемещений или же колебаний структуры в нескольких точках измерений (местах закрепления инерциальных датчиков). Вследствие этого возможна точная регистрация относительных перемещений в пределах структуры, которые позволяют сделать заключения об отклонениях, скручиваниях и/или прогибах между точками измерений. Такие перемещение имеют непосредственное воздействие на материал и поэтому предоставляют важную информацию для контроля, определения интервалов технического обслуживания и/или для оценки долговечности.
В одном варианте выполнения структура может включать множество соединенных друг с другом компонентов, при этом по меньшей мере на двух из компонентов соответственно расположено инерциальное измерительное устройство.
Расположение инерциальных измерительных устройств на нескольких компонентах обеспечивает возможность контролировать относительные перемещения компонентов по отношению друг к другу, вследствие чего может регистрироваться перемещение компонентов по отношению друг к другу и тем самым, например, нагрузка соединительных устройств между компонентами.
Множество инерциальных измерительных устройств могут, например, применяться, чтобы контролировать ветроэнергетическую установку, содержащую башню, расположенную на башне гондолу и расположенный на гондоле ротор с лопастями винта для привода генератора.
При применении нескольких расположенных на лопасти винта инерциальных измерительных устройств может, например, распознаваться прогиб лопасти винта. На основании этого может вырабатываться предупреждающее сообщение и/или может активно регулироваться положение лопасти винта по ветру. Таким образом возможно распознавать повреждения и/или их избегать.
Кроме того, ориентация закрепленного на гондоле инерциального измерительного устройства может определяться по отношению к закрепленному на башне инерциальному измерительному устройству. На основании этого, например, можно оценивать или же корректировать ориентацию гондолы с учетом зарегистрированного направления ветра.
Следовательно, применение нескольких инерциальных измерительных устройств на структуре или же на различных элементах структуры обеспечивает возможность регистрировать и оценивать перемещения структуры с более высокими модами и эффективно контролировать структуру.
В следующем варианте выполнения структурой является ветроэнергетическая установка, и инерциальное измерительное устройство расположено на лопасти винта ветроэнергетической установки. При этом инерциальное измерительное устройство может быть расположено таким образом, что касательная к траектории вращения инерциального измерительного устройства не перпендикулярна и/или не параллельна ни одному из направлений регистрации датчиков мгновенной угловой скорости (монтаж с косыми осями/косоугольный монтаж). Дополнительно или альтернативно центральный модуль может быть выполнен с возможностью определять краевое условие на основании по меньшей мере одной информации из группы, включающей: циклически воздействующее вместе с оборотом ротора на инерциальное измерительное устройство ускорение силы тяжести, циклически воздействующее вместе с оборотом ротора на инерциальное измерительное устройство вращение земли и выходной сигнал импульсного датчика вращения ротора.
Косоугольный монтаж датчиков на лопасти винта обеспечивает, что оси или же направления регистрации расположены не коллинеарно с касательной к направлению вращения лопасти винта. Следовательно, при обороте лопасти винта все оси измерения равным образом подвергаются ускорению или же вращению.
Благодаря расположению инерциального измерительного устройства на лопасти винта инерциальное измерительное устройство при работе ветроэнергетической установки приводится во вращение вместе с лопастью винта. При этом ускорение силы тяжести в размере +/- 1 g циклически воздействует вместе с оборотом ротора на инерциальное измерительное устройство. Равным образом вращение земли также циклически воздействует вместе с оборотом ротора на инерциальное измерительное устройство. Эти воздействия отображаются в зарегистрированных инерциальным измерительным устройством ускорениях и мгновенных угловых скоростях и, таким образом, в выходном сигнале инерциального измерительного устройства.
Циклически действующие вместе с оборотом ротора ускорение силы тяжести и вращение земли накладываются на выходной сигнал и могут в выходном сигнале распознаваться и компенсироваться. В частности, они могут применяться в качестве краевого условия описанной выше коррекции ошибки. Вследствие этого можно распознавать, оценивать или же компенсировать систематические ошибки инерциального измерительного устройства, в частности ошибку масштабного коэффициента гироскопа инерциального измерительного устройства. Благодаря этому может предотвращаться возрастание ошибки вследствие ошибки масштабного коэффициента гироскопа.
В частности, такая коррекция ошибки может применяться также при калибровке датчиков. Монтаж с косыми осями инерциального измерительного устройства на лопасти винта обеспечивает возможность калибровки таким способом всех измерительных осей или же соответствующих датчиков.
Альтернативно или дополнительно может также применяться выходной сигнал импульсного датчика вращения ротора, чтобы регистрировать оборот ротора и на основании этого оценивать воздействие ускорения силы тяжести или же вращения земли на результат измерения и подвергать калибровке инерциальное измерительное устройство.
В следующем варианте выполнения структурой также является ветроэнергетическая установка. Инерциальное измерительное устройство расположено на гондоле ветроэнергетической установки.
Кроме того, центральный модуль выполнен с возможностью определять краевое условие на основании датчика угла поворота гондолы.
Например, датчик угла поворота может быть смонтирован в месте соединения башни с гондолой. Выходной сигнал датчика угла поворота может сравниваться с выходным сигналом инерциального измерительного устройства и использоваться в качестве краевого условия для оценки ошибки или же калибровки инерциального измерительного устройства. Благодаря этому может распознаваться или же корректироваться масштабный коэффициент гироскопа инерциального измерительного устройства. Затем может регистрироваться ориентация гондолы в азимутальном направлении и, например, адаптироваться с учетом направления ветра. Это обеспечивает возможность оптимального использования энергии ветра.
В следующем варианте выполнения центральный модуль выполнен с возможностью определять контролируемое значение на основании по меньшей мере одной информации из группы, включающей: выходное значение математической модели структуры, информацию о статусе структуры, параметр окружающей среды, мгновенную угловую скорость, ускорение, угловую скорость, скорость, ориентацию и/или положение в точке структуры, отличающейся от места монтажа инерциального измерительного устройства, амплитуду перемещения и/или частоту перемещения колебания структуры и скручивание между двумя различными точками структуры.
В частности, можно вводить измеренные инерциальным измерительным устройством или же инерциальными измерительными устройствами значения ускорения и мгновенной угловой скорости, например, в математическую модель, в частности, построенную на основании метода конечных элементов и отображающую физические данные структуры, которая может быть заложена в запоминающем устройстве. Например, центральный модуль может вводить измеренные значения, обращаясь к запоминающему устройству, и на основании измеренных значений последовательно рассчитывать динамическую характеристику структуры. Вследствие этого запускается математическая модель и моделируется динамическая характеристика (перемещения, колебания) структуры.
Альтернативно или дополнительно при определении контролируемого значения может использоваться информация о статусе структуры, например эксплуатационный параметр, в частности регулировка передачи и/или энергия, вырабатываемая ветроэнергетической установкой. Эта информация также может вводиться в математическую модель структуры или же сравниваться с моделируемой динамической характеристикой математической модели. Таким образом, она может применяться, с одной стороны, для моделирования, а с другой стороны, для валидации математической модели.
В качестве параметров окружающей среды для определения контролируемого значения могут, например, рассматриваться (спутниковые) сигналы позиционирования по отношению к положению по меньшей мере одного элемента структуры, ориентация гондолы, угол поворота ротора, диаметральный шаг лопастей винта, направление ветра и сила ветра, направление волн и сила волн, течение, температура и выдаваемая мощность, например, ветроэнергетической установки. В частности, информация в отношении измеренного направления ветра может использоваться, чтобы анализировать или же корректировать ориентацию гондолы в азимутальном направлении.
Кроме того, центральный модуль может быть выполнен с возможностью определять перемещения в точке структуры, отличающейся от места монтажа инерциального измерительного устройства. Это может быть достигнуто путем ввода трехмерных мгновенных угловых скоростей и ускорений в математическую модель, при этом мгновенные угловые скорости и ускорения измеряются одним или несколькими инерциальными измерительными устройствами с другими местами монтажа, отличающимися от этой точки. На основании этого перемещения могут рассчитываться также в дополнительных точках структуры. Например, могут регистрироваться скручивания между двумя различными точками структуры, например между двумя различными точками лопасти винта или башни, и, таким образом, механические нагрузки структуры. Так, например, могут определяться или же рассчитываться перемещения с более высокими модами. Это обеспечивает возможность эффективного моделирования и контроля перемещения и колебаний общей структуры.
Кроме того, контролируемое значение может определяться на основании амплитуды перемещения и/или частоты перемещения колебания структуры. В частности, на основании измеренных, например, трехмерных значений ускорения могут регистрироваться колебания структуры или же ее элементов и, таким образом, корпусной шум структуры. Это обеспечивает возможность распознавания механических повреждений в структуре, например в приводной ветви ветроэнергетической установки (в частности, разрушения или износ в передаче, на зубьях и/или в подшипниках, которые ведут к изменению корпусного шума).
При помощи анализа корпусного шума на основе расположенных на лопастях винта инерциальных измерительных устройств могут, например, распознаваться отложения льда и трещины на лопастях винта и инициироваться соответствующие мероприятия по техническому обслуживанию.
В следующем варианте выполнения центральный модуль может быть выполнен с возможностью регистрировать граничные величины контролируемого значения и при превышении по меньшей мере одной из граничных величин передавать информацию выходному модулю. Кроме того, он может быть выполнен с возможностью на основании контролируемого значения передавать выходному модулю предложение в отношении управляющих параметров для регулирования исполнительных элементов в структуре. Альтернативно или дополнительно центральный модуль может быть выполнен с возможностью на основании контролируемого значения посылать управляющие параметры на исполнительные элементы.
Этот вариант выполнения обеспечивает множество возможностей контроля от контроля граничного значения и сообщения о превышении граничного значения посредством определения управляющих предложений вплоть до активного регулирования динамической характеристики структуры.
Таким образом, возможно распознавать угрозу повреждений и уведомлять о ней. В рамках технического обслуживания ветроэнергетических установок распознавание и уведомление об отложении льда, о дисбалансе ротора или же о повреждениях передачи обеспечивает возможность надежной эксплуатации и обнаружения потребности в регулировании и техническом обслуживании.
Кроме того, обслуживающему персоналу может оказываться поддержка путем выдачи данных на выходном модуле, например, посредством того, что вырабатываются предложения в отношении регулирования ветроэнергетической установки. Например, может быть предложено изменение положения лопастей винта или изменение регулировки передачи. Благодаря этому можно избежать повреждений и может быть достигнуто лучшее использование мощности.
Кроме того, наряду с выдачей контролируемого значения центральный модуль может передавать управляющие параметры на исполнительные элементы структуры. Это обеспечивает возможность быстро реагировать на зарегистрированное при помощи контролируемого значения критическое состояние и, например, после повреждения передачи быстро и активно отворачивать лопасти винта от ветра. Кроме того, таким образом может быть реализовано ориентированное на потребность и одновременно щадящее материалы управление выдаваемой мощностью.
В зависимости от уровня критичности определенного контролируемого значения определение управляющих параметров на исполнительных элементах может, например, зависеть от человеческого воздействия обслуживающего персонала.
Способ контроля перемещений структуры включает регистрацию мгновенных угловых скоростей и значений ускорения в неподвижной относительно Земли инерциальной системе координат по меньшей мере одним закрепленным на структуре инерциальным измерительным устройством, определение контролируемого значения на основании мгновенных угловых скоростей и значений ускорения при помощи навигационного алгоритма и выдачу контролируемого значения.
Способ может, например, выполняться в любом произвольном варианте выполнения описанной выше системы.
В одном варианте выполнения способ может включать ввод мгновенных угловых скоростей и значений ускорения в математическую модель структуры, валидацию математической модели при помощи сравнения характеристики измеренных мгновенных угловых скоростей и значений ускорения соответственно с рассчитанными в модели мгновенными угловыми скоростями и значениями ускорения и определение контролируемого значения на основании математической модели.
Этот способ обеспечивает возможность запуска математической модели, например, при помощи измеренных значений и расчета на основании запуска динамической характеристики модели, например, поэтапно в течение заданного промежутка времени. Параллельно этому в течение соответствующего промежутка времени соответственно могут регистрироваться измеренные значения датчиков ускорения и датчиков мгновенной угловой скорости инерциального измерительного устройства (устройств). Путем сравнения зарегистрированных и рассчитанных мгновенных угловых скоростей или же рассчитанных на их основе угловых скоростей, скоростей, ориентации или же положения возможно проводить валидацию математической модели.
Например, математическая модель может рассматриваться в качестве пригодной, если отклонения имеют место лишь ниже заданного граничного значения. В ином случае может быть зарегистрирована потребность в адаптации математической модели или же способа расчета. На основании прошедшей валидацию математической модели может определяться и выдаваться контролируемое значение.
В следующем варианте выполнения способа структура может иметь по меньшей мере один элемент ветроэнергетической установки, содержащий ротор с лопастями винта, при этом инерциальное измерительное устройство расположено на одной из лопастей винта. Способ может включать калибровку инерциального измерительного устройства на основании циклически воздействующего вместе с оборотом ротора на инерциальное измерительное устройство ускорения силы тяжести, на основании циклически воздействующего вместе с оборотом ротора на инерциальное измерительное устройство вращения земли и/или на основании импульсного датчика вращения ротора (в соответствии с описанным выше способом).
При косоугольном монтаже инерциального измерительного устройства (устройств) на одной из лопастей винта в рамках калибровки могут оцениваться и корректироваться ошибка нулевой точки и масштабный коэффициент гироскопа инерциального измерительного устройства. Этот способ может, в частности, быть полезным при запуске в эксплуатацию ветроэнергетической установки.
В следующем варианте выполнения структура включает по меньшей мере один элемент ветроэнергетической установки, содержащий ротор с лопастями винта, при этом инерциальное измерительное устройство расположено на роторе. Способ включает распознавание дисбаланса ротора на основании зарегистрированных мгновенных угловых скоростей и значений ускорения.
Этот способ может, в частности, применяться при балансировке ротора. Дисбалансы могут распознаваться и корректироваться, вследствие чего возможна эффективная эксплуатация ветроэнергетической установки без усталости.
Этот и следующие признаки изобретения подробнее поясняются ниже при помощи примеров со ссылками на прилагаемые чертежи. На них изображено:
- фиг. 1 - система для контроля ветроэнергетической установки на основании результатов измерений нескольких инерциальных измерительных устройств с использованием навигационного алгоритма, и
- фиг. 2 - блок-схема системы для контроля ветроэнергетической установки (ВЭУ) на основании математической модели.
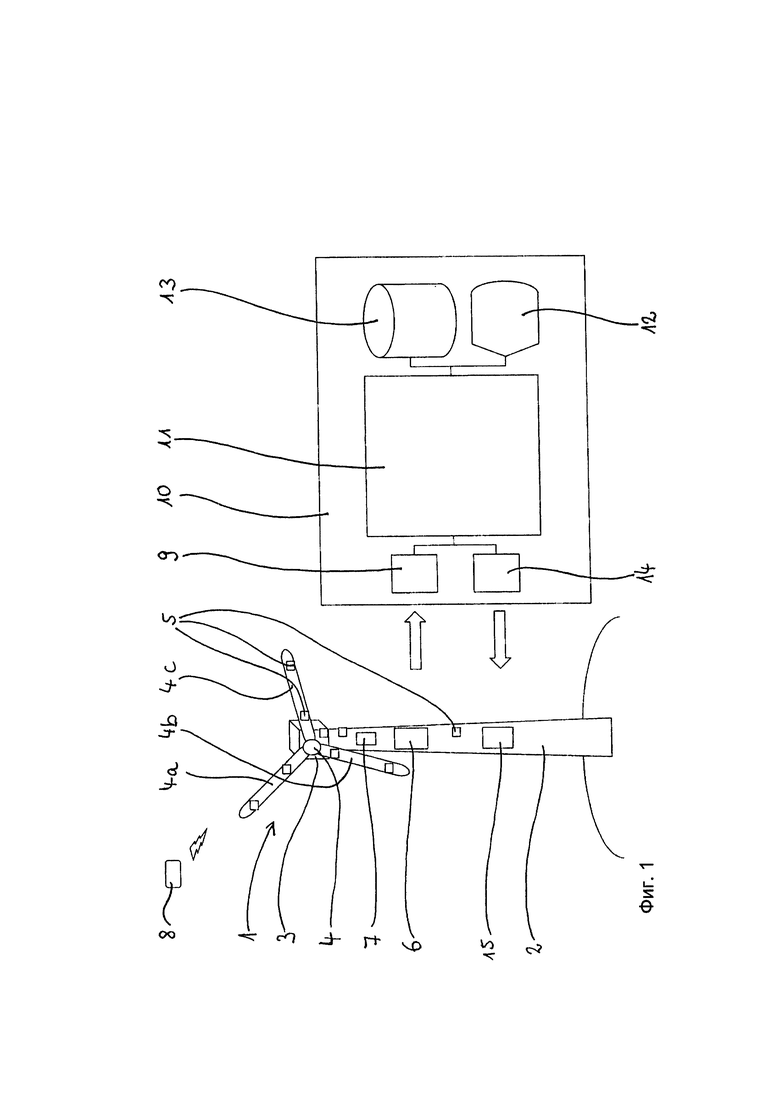
На фиг. 1 показана система для контроля перемещений ветроэнергетической установки 1, служащей в качестве структуры.
Ветроэнергетическая установка 1 имеет сооруженную на основании башню 2, на которой расположена гондола 3 с предусмотренным на ней ротором 4, содержащим лопасти 4a, 4b и 4с винта. На ветроэнергетической установке 1 или же ее компонентах 2, 3, 4, 4a, 4b и 4с соответственно расположены одно или же несколько инерциальных измерительных устройств 5. Они обозначены на чертеже маленькими клетками и из соображений наглядности не обозначены отдельно номерами позиций.
Инерциальные измерительные устройства 5 имеют соответственно три датчика мгновенной угловой скорости с линейно независимыми друг от друга и/или ортогональными друг другу осями регистрации, а также три датчика ускорения с соответственно линейно независимыми друг от друга и/или ортогональными друг другу направлениями регистрации. Их выходной сигнал может применяться, чтобы с помощью, например, навигационного алгоритма, известного из навигации сухопутных транспортных средств, судов или летательных аппаратов, производить расчет угловых скоростей и скоростей, или же ориентации и положений соответствующих инерциальных измерительных устройств 5 в неподвижной относительно Земли инерциальной системе координат.
В качестве основы для таких расчетов передающий модуль 6 собирает измеренные инерциальными измерительными устройствами 5 значения, а также, при необходимости, измеренные дополнительным модулем 7 датчиков параметры окружающей среды и информацию о статусе ветроэнергетической установки. Параметры окружающей среды могут относиться, например, к направлению ветра, силе ветра, температуре, направлению волн и/или силе волн (например, в морских установках). Информация о статусе может относиться к статусу ветроэнергетической установки и включать, например, ориентацию гондолы 3, угол поворота ротора 4, диаметральный шаг или же прогиб лопастей 4a, 4b, 4с винта и выдаваемую мощность выработанной энергии. Кроме того, информация о статусе может, например, включать принимаемый от спутника 8 сигнал позиционирования, который регистрируется модулем 7 датчиков и может передаваться на передающий модуль 6.
Собранные данные могут посылаться от передающегося модуля 6, например, при помощи беспроводной или кабельной коммуникации на приемник 9 устройства 10 контроля. Устройство 10 контроля может локально находиться в окружении ветроэнергетической установки 1, однако может также находиться на удалении от ветроэнергетической установки 1. Локальное расположение устройства 10 контроля может также означать расположение внутри ветроэнергетической установки 1 или на ней или расположение в ближайшем окружении. Например, устройство 10 контроля может быть расположено в центре контроля и управления парка ветроэнергетических установок, в котором установлена ветроэнергетическая установка 1. Расположение на удалении от ветроэнергетической установки 1 имеет смысл, например, для удаленных ветроэнергетических установок.
Устройство 10 контроля может иметь центральный модуль 11 для определения контролируемого значения на основании передаваемых данных, в частности на основании измеренных инерциальными измерительными устройствами 5 мгновенных угловых скоростей и значений ускорения. Например, центральный модуль 11 может выполнять классический навигационный алгоритм с компенсацией Шулера.
Благодаря этому для каждого из инерциальных измерительных устройств могут определяться угловая скорость и скорость перемещения, и положение и ориентация в пространстве. Кроме того, относительные перемещения инерциальных измерительных устройств могут определяться и анализироваться по отношению друг к другу. На основании этого может определяться контролируемое значение, например, диаметральный шаг лопасти 4 с ротора или скручивание башни 2 вследствие ветровой нагрузки.
Контролируемое значение может посылаться на выходной модуль 12, который, например, делает контролируемое значение доступным для обслуживающего персонала или же выводит его на отображение. Альтернативно контролируемое значение может также перехватываться запоминающим устройством 13 и сохраняться с целью документирования.
При применении классических навигационных алгоритмов для контроля перемещения структур существует возможность учесть ограничения и условия, которые вытекают из физических свойств структуры, в навигационный алгоритм и, в частности, при оценке ошибки или же при коррекции ошибки.
В частности, на измеренные значения инерциальных измерительных устройств 5 обычно наложены ошибки, которые, например, объясняются ошибкой нулевой точки или же ошибкой масштабного коэффициента содержащихся датчиков ускорения и датчиков мгновенной угловой скорости. При определении линейных и угловых скоростей или же положения и ориентации ошибки с накапливанием интегрируются и приводят к усиливающемуся дрейфу.
При контроле структур имеющиеся условия структуры могут рассматриваться в качестве краевых условий навигационного алгоритма и в рамках коррекции ошибки учитываться, например, при помощи фильтра Калмана. Такими краевыми условиями являются, например (географическое) положение структуры, которое для зданий или для установок, сооруженных на неподвижном основании, в общем является неподвижным. Для удаленных установок положение может быть определено, например, при помощи спутникового сигнала позиционирования (GPS). Дополнительные краевые условия могут, как описано выше, также определяться из информации об окружающей среде или при помощи дополнительных датчиков, например датчика наклона башни.
Краевые условия обеспечивают возможность оценивать и корректировать систематические ошибки измеренных значений инерциальных измерительных устройств. Благодаря этому возможно точное определение положения и ориентации, которое предоставляет подходящее основание для определения контролируемого значения. Следующие краевые условия, которые могут привести к улучшению оценки ошибки и коррекции ошибки, уже описаны выше в общей части и могут использоваться в варианте выполнения, показанном на фиг. 1.
Кроме того, центральный модуль 11 устройства 10 контроля может быть выполнен с возможностью регистрировать граничные величины контролируемого значения и при превышении по меньшей мере одной из граничных величин посылать информацию на выходной модуль 12. Задание граничных значений обеспечивает возможность распознавания угрозы повреждений и уведомления о ней, а также о потребности в техническом обслуживании и регулировании.
Центральный модуль 11 на основании контролируемого значения может также выдавать предложение в отношении управляющих параметров для регулирования исполнительных элементов на ветроэнергетической установке 1. Такие предложения могут отображаться для обслуживающего персонала, например, на выходном устройстве 12. Они могут, например, содержать ориентацию гондолы 3 в соответствии с зарегистрированным направлением ветра, ориентацию лопастей винта с учетом вырабатываемой мощности и/или снижение производительности ветроэнергетической установки, например, при угрозе повреждений или в случае повреждений.
Кроме того, центральный модуль 11 может передавать управляющие параметры через передающий модуль 14 на приемный модуль 15 ветроэнергетической установки 1. В ветроэнергетической установке 1 принятые управляющие параметры могут применяться для того, чтобы соответствующим образом управлять исполнительными элементами ветроэнергетической установки и, например, инициировать вращение гондолы 3 или выравнивание лопастей 4a, 4b, 4с винта.
Кроме того, центральный модуль 11 может определять контролируемое значение, например, на основе математической модели, которая может рассчитывать динамическую характеристику ветроэнергетической установки 1 и, например, может быть заложена в запоминающее устройство 13. Измеренные инерциальными измерительными устройствами 5 мгновенные угловые скорости и ускорения или же определенные из них скорости, угловые скорости, положения и ориентации могут вводиться в математическую модель, которая на основании этого рассчитывает, моделирует или же динамически отображает динамическую характеристику ветроэнергетической установки.
Измеренные модулем 7 датчиков и передаваемые передающим модулем 6 дополнительные данные, например параметры окружающей среды и информация о статусе, также могут применяться для стимулирования модели.
Рассчитанная динамическая характеристика может проверяться и оцениваться на фоне дополнительных измеренных значений инерциальных измерительных устройств 5 или же дополнительной информации о статусе, так что эти значения одновременно обеспечивают возможность стимулирования и поддержки математической модели.
Математическая модель может, например, применяться, чтобы регистрировать и оценивать перемещения ветроэнергетической установки 1 с более высокими модами, например скручивание башни 2 или прогибы лопастей 4a, 4b, 4с винта.
Степень детализации этапов расчета математической модели может определяться с учетом требуемой точности вычислений и доступной вычислительной мощности. Если устройство 10 контроля и, в частности, центральный модуль 11 обладают достаточной вычислительной производительностью, то расчет и оценка по существу могут осуществляться в условиях реального времени или же лишь с небольшой задержкой.
На практике система для контроля ветроэнергетической установки или же примененный в ней способ контроля могут использоваться в качестве системы контроля состояния, посредством того, что определенные перемещения, колебания, частоты и/или амплитуды сравниваются с заданными граничными значениями. В рамках контроля состояния при превышении граничных значений могут выдаваться предупреждения.
Кроме того, значения измерений и расчетов могут также рассматриваться как регулируемые параметры, чтобы обеспечить возможность оптимального регулирования ветроэнергетической установки 1, с одной стороны, с учетом воздействующих сил, а с другой стороны, с учетом отдаваемой мощности. Это обеспечивает возможность совместить хорошую эффективность и щадящий режим при эксплуатации материала.
Анализ изменения нагрузки и различных нагрузок в течение продолжительного промежутка времени обеспечивает возможность определения остаточной долговечности ветроэнергетической установки 1 или же ее компонентов и/или планирования мероприятий по техническому обслуживанию.
Как уже описано выше, значения измерений и расчетов могут также применяться при разработке и испытании установок, а также при их запуске в эксплуатацию, например, чтобы распознавать и корректировать чрезмерные нагрузки или дисбалансы.
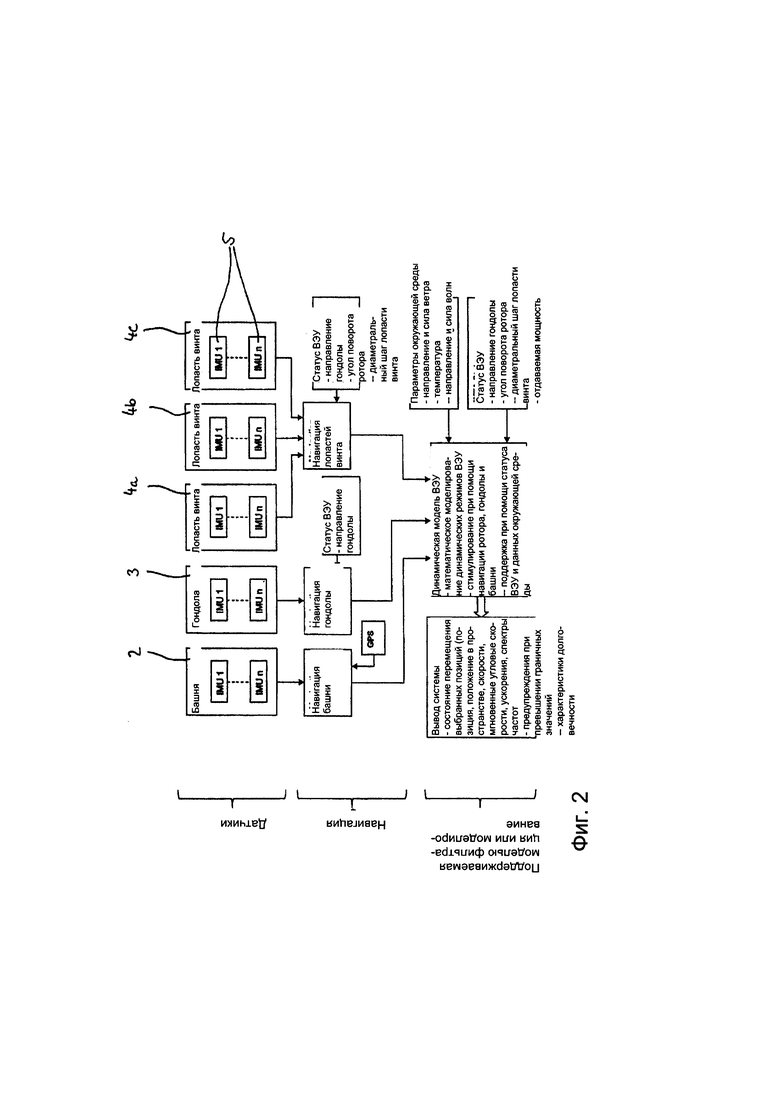
На фиг. 2 показана блок-схема варианта выполнения системы контроля, например системы контроля согласно фиг. 1.
В верхнем участке показаны датчики и их расположение. В соответствии с этим башня 2, гондола 3 и лопасти 4a, 4b, 4с винта соответственно имеют n инерциальных измерительных устройств (IMU - инерциальное измерительное устройство), которые соответственно закреплены в различных позициях соответствующих компонентов.
Инерциальные измерительные устройства 5 посылают свои данные на показанные в средней области фиг. 2 навигационные модули соответствующих компонентов, в которых производятся навигационные расчеты на основании навигационного алгоритма. Здесь могут, например, определяться скорости, угловые скорости, положения и ориентации инерциальных измерительных устройств. Навигация поддерживается при помощи соответствующих дополнительных данных или же краевых условий структуры, например, при помощи сигнала GPS, ориентации гондолы, угла поворота ротора и/или диаметрального шага лопастей винта. Эта информация может, как описано выше, применяться, например, для оценки ошибки, коррекции ошибки и/или калибровки датчиков.
В нижней области фиг. 2 показана обеспечиваемая моделью фильтрация данных, в которую совместно вводятся результаты навигационных расчетов, а также дополнительные параметры окружающей среды (направление ветра, сила ветра, температура, направление волн, сила волн) и информация о статусе (ориентация гондолы, угол поворота ротора, диаметральный шаг лопастей винта, отдаваемая мощность) ветроэнергетической установки 1. Данные при этом могут обрабатываться непрерывно и по существу в реальном времени. Следовательно, основанная на модели фильтрация может соответствовать моделированию, которое обеспечивает возможность поддерживаемой моделью оценки данных в «онлайн» режиме, то есть без задержки времени, например, в соответствии с возможно заданными требованиями в отношении реального времени.
В рамках поддерживаемой моделью фильтрации используют математическую модель ветроэнергетической установки, чтобы рассчитать динамическую характеристику ветроэнергетической установки 1. Как описано выше, данные навигации могут запускать, поддерживать и обеспечивать валидацию модели. В качестве выходных данных поддерживаемая моделью фильтрация предоставляет информацию, например, в отношении состояния перемещения выбранных позиций, предупреждения при превышении заранее определенных граничных значений и/или характеристики долговечности. Эти результаты могут, например, посылаться в выходной модуль 12, чтобы сделать их доступными для обслуживающего персонала, а именно в рамках контроля состояния, планирования технического обслуживания и/или в рамках активного регулирования ветроэнергетической установки 1.
Вследствие этого применение инерциальных измерительных систем и классических навигационных алгоритмов в области контроля зданий и установок может обеспечить возможность эффективного контроля и регулирования соответствующей структуры. Имеющие место в таких зданиях и установках краевые условия могут применяться для того, чтобы оценивать и компенсировать ошибки, типичным образом возникающие в рамках инерциальной навигации (ошибка нулевой точки и ошибка масштабного коэффициента). На основании этого возможно обеспечить, с одной стороны, эффективную, а с другой стороны, щадящую эксплуатацию, например, ветроэнергетических установок, и оптимизированное в отношении затрат планирование технического обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ И СООТВЕТСТВУЮЩАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2017 |
|
RU2721466C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕРЯЕМОЙ ЭНЕРГИИ | 2012 |
|
RU2543367C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВКИ ДЛЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ, ЦИФРОВОЙ НОСИТЕЛЬ ДАННЫХ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2633306C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |
| СПОСОБ КОНТРОЛЯ НЕСКОЛЬКИХ ЭЛЕКТРИЧЕСКИХ ПРОВОДОВ ЭЛЕКТРОЭНЕРГИИ ЖГУТА ПРОВОДОВ | 2013 |
|
RU2605081C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ ИЛИ ВЕТРОВОЙ ЭЛЕКТРОСТАНЦИЕЙ | 2013 |
|
RU2591366C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2017 |
|
RU2718373C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
Изобретение относится к области навигационного приборостроения и может найти применение в системах управления транспортными средствами. Технический результат – расширение функциональных возможностей. Для этого система для контроля перемещений структуры (1) содержит по меньшей мере одно закрепленное на структуре инерциальное измерительное устройство (5) для регистрации мгновенных угловых скоростей и значений ускорения в неподвижной относительно Земли инерциальной системе координат. Центральный модуль (11) определяет контролируемое значение на основании мгновенных угловых скоростей и значений ускорения при помощи навигационного алгоритма. Кроме того, предусмотрен выходной модуль (12) для выдачи контролируемого значения. Центральный модуль (11) выполнен с возможностью определять и/или корректировать ошибку измерения инерциального измерительного устройства (5) на основании заданного структурой краевого условия, и центральный модуль (11) выполнен с возможностью определять краевое условие на основании по меньшей мере одной информации из группы, включающей в себя: - по существу стационарное положение структуры (1), - ограничение степени свободы перемещения по меньшей мере одного элемента структуры (1), - угол наклона по меньшей мере одного элемента структуры (1), - среднее значение перемещения по меньшей мере одного элемента структуры (1) и/или инерциального измерительного устройства (5). При этом обеспечивается повышение надежности и эффективности контроля транспортных средств и возможность планирования технического обслуживания или оценки остаточного срока службы элементов транспортных средств. 2 н. и 10 з.п. ф-лы, 2 ил.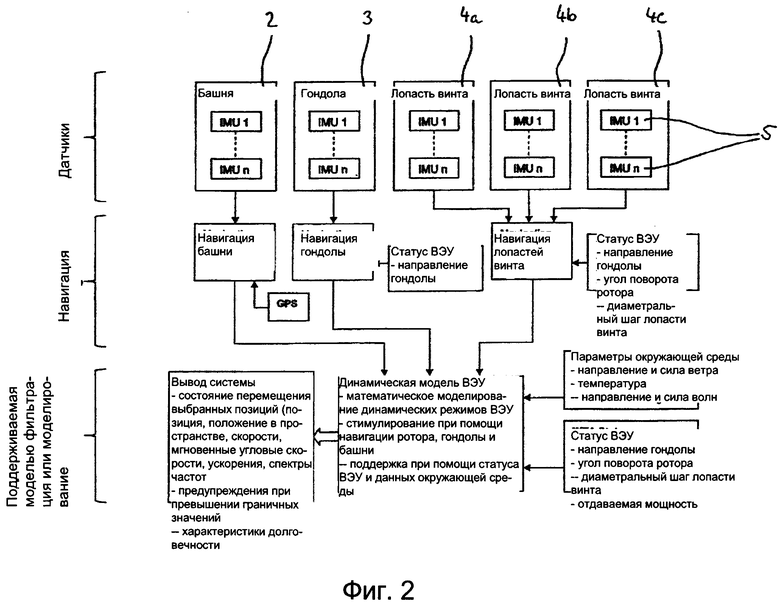
1. Система для контроля перемещений структуры (1), содержащая:
- по меньшей мере одно закрепленное на структуре инерциальное измерительное устройство (5) для определения мгновенных угловых скоростей и значений ускорения в неподвижной относительно Земли системе координат,
- центральный модуль (11) для определения контролируемого значения на основании мгновенных угловых скоростей и значений ускорения при помощи инерциального навигационного алгоритма и
- выходной модуль (12) для выдачи контролируемого значения, причем
центральный модуль (11) выполнен с возможностью определять и/или корректировать ошибку измерения инерциального измерительного устройства (5) на основании заданного структурой краевого условия, и
центральный модуль (11) выполнен с возможностью определять краевое условие на основании по меньшей мере одной информации из группы, включающей в себя:
- по существу стационарное положение структуры (1),
- ограничение степени свободы перемещения по меньшей мере одного элемента структуры (1),
- угол наклона по меньшей мере одного элемента структуры (1),
- среднее значение перемещения по меньшей мере одного элемента структуры (1) и/или инерциального измерительного устройства (5).
2. Система по п. 1, в которой
инерциальное измерительное устройство (5) содержит три датчика мгновенной угловой скорости с соответственно линейно независимыми друг от друга и/или ортогональными друг другу осями регистрации, а также три датчика ускорения с соответственно линейно независимыми друг от друга и/или ортогональными друг другу направлениями регистрации.
3. Система по п. 1 или 2, содержащая
множество закрепленных на структуре инерциальных измерительных устройств (5), при этом
центральный модуль (11) выполнен с возможностью определять контролируемое значение на основании относительного перемещения между по меньшей мере двумя из указанных нескольких инерциальных измерительных устройств (5).
4. Система по п. 1 или 2, в которой
структура (1) включает в себя множество соединенных друг с другом компонентов (2, 3, 4, 4a, 4b, 4c), причем
по меньшей мере на двух из компонентов (2, 3, 4, 4а, 4b, 4c) соответственно расположено инерциальное измерительное устройство.
5. Система по п. 1 или 2, в которой
структурой является ветроэнергетическая установка (1), и инерциальное измерительное устройство (5) расположено на лопасти (4а, 4b, 4c) винта ветроэнергетической установки (1), причем
инерциальное измерительное устройство (5) расположено таким образом, что касательная к траектории вращения инерциального измерительного устройства (5) не перпендикулярна и/или не параллельна ни одному из направлений регистрации датчиков мгновенной угловой скорости, и/или
центральный модуль (11) выполнен с возможностью определять краевое условие на основании по меньшей мере одной информации из группы, включающей в себя:
- циклически воздействующее вместе с оборотом ротора (4) на инерциальное измерительное устройство (5) ускорение силы тяжести,
- циклически воздействующее вместе с оборотом ротора (4) на инерциальное измерительное устройство (5) вращение Земли, и
- выходной сигнал импульсного датчика вращения ротора (4).
6. Система по п. 1 или 2, в которой
структурой является ветроэнергетическая установка (1), и инерциальное измерительное устройство расположено на гондоле (3) ветроэнергетической установки (1), и
центральный модуль (11) выполнен с возможностью определять краевое условие на основании датчика угла поворота гондолы (3).
7. Система по п. 1 или 2, в которой
центральный модуль (11) выполнен с возможностью определять контролируемое значение на основании по меньшей мере одной информации из группы, включающей в себя:
- выходное значение математической модели структуры (1),
- информацию о статусе структуры (1),
- параметр окружающей среды,
- мгновенную угловую скорость, ускорение, угловую скорость, скорость, ориентацию и/или положение в точке структуры, отличающейся от места монтажа инерциального измерительного устройства (5),
- скручивание между двумя различными точками структуры, и
- амплитуду перемещения и/или частоту перемещения колебания структуры.
8. Система по п. 1 или 2, в которой центральный модуль (11) выполнен с возможностью:
- регистрировать граничные величины контролируемого значения и при превышении по меньшей мере одной из граничных величин посылать информацию в выходной модуль (12),
- на основании контролируемого значения посылать в выходной модуль (12) предложение в отношении управляющих параметров для регулирования исполнительных элементов структуры (1), и/или
- на основании контролируемого значения посылать управляющие параметры на исполнительные элементы.
9. Способ контроля перемещений структуры (1), включающий в себя:
- определение мгновенных угловых скоростей и значений ускорения в неподвижной относительно Земли системе координат по меньшей мере одним закрепленным на структуре (1) инерциальным измерительным устройством (5),
- определение контролируемого значения на основании мгновенных угловых скоростей и значений ускорения при помощи инерциального навигационного алгоритма,
- определение и/или корректировку ошибки измерения определенных мгновенных угловых скоростей и значений ускорения на основании заданного структурой краевого условия,
- выдачу контролируемого значения, причем
ошибку измерения инерциального измерительного устройства (5) определяют и/или корректируют на основании заданного структурой краевого условия,
которое определяют на основании по меньшей мере одной информации из группы, включающей в себя:
- по существу стационарное положение структуры (1),
- ограничение степени свободы перемещения по меньшей мере одного элемента структуры (1),
- угол наклона по меньшей мере одного элемента структуры (1),
- среднее значение перемещения по меньшей мере одного элемента структуры (1) и/или инерциального измерительного устройства (5).
10. Способ по п. 9, включающий в себя:
- ввод мгновенных угловых скоростей и значений ускорения в математическую модель структуры,
- валидацию математической модели при помощи сравнивания характеристики измеренных мгновенных угловых скоростей и значений ускорения соответственно с мгновенными угловыми скоростями и значениями ускорения, рассчитанными согласно модели, и
- определение контролируемого значения на основании математической модели.
11. Способ по п. 9 или 10, в котором
структура содержит по меньшей мере один элемент ветроэнергетической установки (1), включающий в себя ротор (4) с лопастями (4а, 4b, 4c) винта, причем инерциальное измерительное устройство (5) расположено на одной из лопастей (4а, 4b, 4c) винта, включающий в себя
калибровку инерциального измерительного устройства (5) на основании циклически воздействующего вместе с оборотом ротора (4) на инерциальное измерительное устройство (5) ускорения силы тяжести, на основании циклически воздействующего вместе с оборотом ротора (4) на инерциальное измерительное устройство (5) вращения Земли и/или на основании импульсного датчика вращения ротора (4).
12. Способ по п. 9 или 10, в котором
структура содержит по меньшей мере один элемент ветроэнергетической установки (1), включающий в себя ротор (4), причем инерциальное измерительное устройство (5) расположено на роторе (4), включающий в себя регистрацию дисбаланса ротора (4) на основании зарегистрированных мгновенных угловых скоростей и значений ускорения.
| WO 2012049492 А1, 19.04.2012 | |||
| US 20090326851 A1, 31.12.2009 | |||
| WO 2013110215 A1, 01.08.2013 | |||
| DE 102006005258 A1, 16.08.2007 | |||
| Исследование бортовой системы программного управления, рис | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
| - М.: Наука | |||
| Физматлит, 1999 | |||
| Способ амидирования жидких сульфохлоридов ароматического ряда | 1921 |
|
SU316A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И КОНТРОЛЯ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ И ГЕОМЕТРИЧЕСКОЙ ФОРМЫ КОНТАКТИРУЕМОЙ ПОВЕРХНОСТИ И ТРАЕКТОРИИ ПЕРЕМЕЩЕНИЯ С ЕГО ПОМОЩЬЮ | 2009 |
|
RU2424893C2 |

