Изобретение относится к области электротехники и может использоваться для компенсации емкостных токов короткого замыкания и подавления токов утечки, вызванных естественной несимметрией емкостей фаз на землю в сетях с изолированной нейтралью 6-10 кВ.
Известно устройство для компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ (Устройство автоматической настройки дугогасящего реактора, патент RU 2404501, http://www.findpatent.ru/patent/240/2404501.html), содержащее коммутируемые ответвления с соответствующими емкостями фаз относительно земли, плунжерный дугогасящий реактор с трансформатором тока в цепи силовой обмотки реактора, подключенный через нейтралеобразующий трансформатор, первичные обмотки которого соединены в звезду с выведенной нейтралью, вторичные обмотки соединяются в замкнутый треугольник, измерительный трансформатор напряжения, включенный по схеме разомкнутый треугольник, два измерительных органа, логическое устройство, блок управления индуктивностью ДГР, формирователь импульсов искусственного возмущения, связанный со вторым измерительным органом непосредственно или через логическое устройство.
К недостаткам устройства следует отнести низкую надежность и малый ресурс электромеханических узлов плунжерных реакторов. Плунжерные реакторы не допускают поисковых движений, автоколебательных режимов и длительных переходных процессов, такое ограничение снижает его быстродействие, скорость его настройки достигает 120 с на весь диапазон регулирования реактора. В целом устройство имеет большую массу и габариты, т.к. величина индуктивности плунжерного реактора, входящего в его состав, рассчитывается на частоту тока 50 Гц. Наличие специального электропривода для изменения величины индуктивности плунжерного реактора снижает надежность всего устройства.
Известно устройство для компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ (Устройство для компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ, патент RU №148769, http://poleznayamodel.ru/model/14/148769.html), которое является наиболее близким к предлагаемому техническому решению (прототип), содержащее нейтралеобразующий трансформатор, первичные обмотки которого соединены в звезду с выведенной нейтралью, а вторичные обмотки соединены в замкнутый треугольник, статический преобразователь электрической энергии, система управления, измеритель, трехфазный разъединитель.
К недостаткам устройства-прототипа следует отнести малое быстродействие, так как используется параметрическая незамкнутая система управления только нулевой последовательностью тока.
Задача изобретения (технический результат) - увеличение быстродействия устройства в целом.
Задача достигается тем, что в устройство компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ, содержащее трехфазный разъединитель, соединенный с фазами сети и системой управления, которая соединена с измерителем, статическим преобразователем электрической энергии, введены датчик тока, датчик напряжения. Причем статический преобразователь электрической энергии выполнен трехфазным и соединен с землей, фазы статического преобразователя электрической энергии соединены с сетью через датчик тока, соединенный с трехфазным разъединителем, а система управления соединена с датчиком тока, датчиком напряжения сети, трехфазным статическим преобразователем электрической энергии, и содержит преобразователи Гильберта, соединенные с блоками расчета прямой, обратной и нулевой последовательностей тока и напряжения, блок расчета прямой, обратной и нулевой последовательности тока, соединенный с преобразователями Гильберта, блоками перехода из системы координат ABC в систему координат αβ, преобразователем Гильберта нулевой последовательности и блоком перехода из системы координат αβ в стационарную систему координат dq для нулевой последовательности, блоки перехода из системы координат ABC в систему координат αβ, соединенные с блоком расчета прямой, обратной и нулевой последовательности тока и блоками перехода из системы координат αβ в стационарную систему координат dq, преобразователь Гильберта нулевой последовательности, соединенный с блоком расчета прямой, обратной и нулевой последовательности тока и блоком перехода из системы координат αβ в стационарную систему координат dq для нулевой последовательности, блоки перехода из системы координат αβ в стационарную систему координат dq, соединенные с блоками перехода из системы координат ABC в систему координат αβ, схемами вычитания и блоками расчета угла γ, блок перехода из системы координат αβ в стационарную систему координат dq для нулевой последовательности, соединенный с преобразователем Гильберта нулевой последовательности, блоком расчета прямой, обратной и нулевой последовательности тока, схемами вычитания и блоком расчета угла γ0, схемы вычитания, соединенные с блоками перехода из системы координат αβ в стационарную систему координат dq, блоками пропорционально-интегральных регуляторов и блоками задания уставок, блоки задания уставок, соединенные со схемами вычитания, блоки пропорционально-интегральных регуляторов, соединенные со схемами вычитания и блоками перехода из стационарной системы координат dq в систему координат ABC, блоки пропорционально-интегральных регуляторов, соединенные со схемами вычитания и блоком перехода из стационарной системы координат dq в систему координат αβ, блок перехода из стационарной системы координат dq в систему координат αβ, соединенный с блоками пропорционально-интегральных регуляторов, схемами суммирования и блоком расчета угла γ0, блоки перехода из стационарной системы координат dq в систему координат ABC, соединенные с блоками пропорционально-интегральных регуляторов, схемами суммирования и блоками расчета угла γ, схемы суммирования, соединенные с блоками перехода из стационарной системы координат dq в систему координат ABC, компараторами и блоком перехода из стационарной системы координат dq в систему координат αβ, генератор опорного напряжения, соединенный с компараторами, компараторы, соединенные с генератором опорного напряжения, схемами суммирования и логическими устройствами НЕ, логические устройства НЕ, соединенные с компараторами, блок расчета прямой, обратной и нулевой последовательности напряжения, соединенный с блоком сравнения, преобразователями Гильберта и блоками расчета угла γ, блоки расчета угла γ, соединенные с блоками перехода из системы координат αβ в стационарную систему координат dq и блоками перехода из стационарной системы координат dq в систему координат ABC, блок расчета угла γ0, соединенный с блоком перехода из системы координат αβ в стационарную систему координат dq и блоком перехода из стационарной системы координат dq в систему координат αβ, блок сравнения, соединенный с блоком расчета прямой, обратной и нулевой последовательности напряжения, причем преобразователи Гильберта, соединены с датчиками напряжения и датчиками тока, блок расчета прямой, обратной и нулевой последовательности тока и напряжения соединен с датчиками тока и напряжения, блок задания уставок по d-составляющей нулевой последовательности тока соединена с измерителем, схемы суммирования соединены с датчиками напряжения.
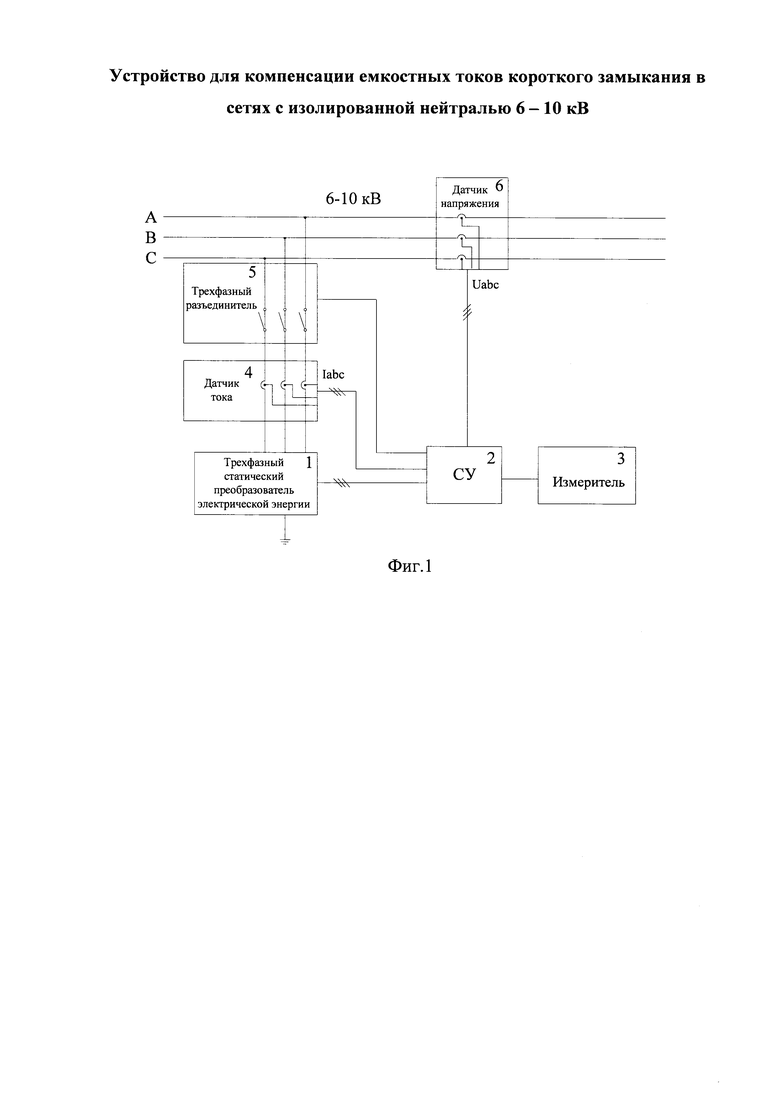
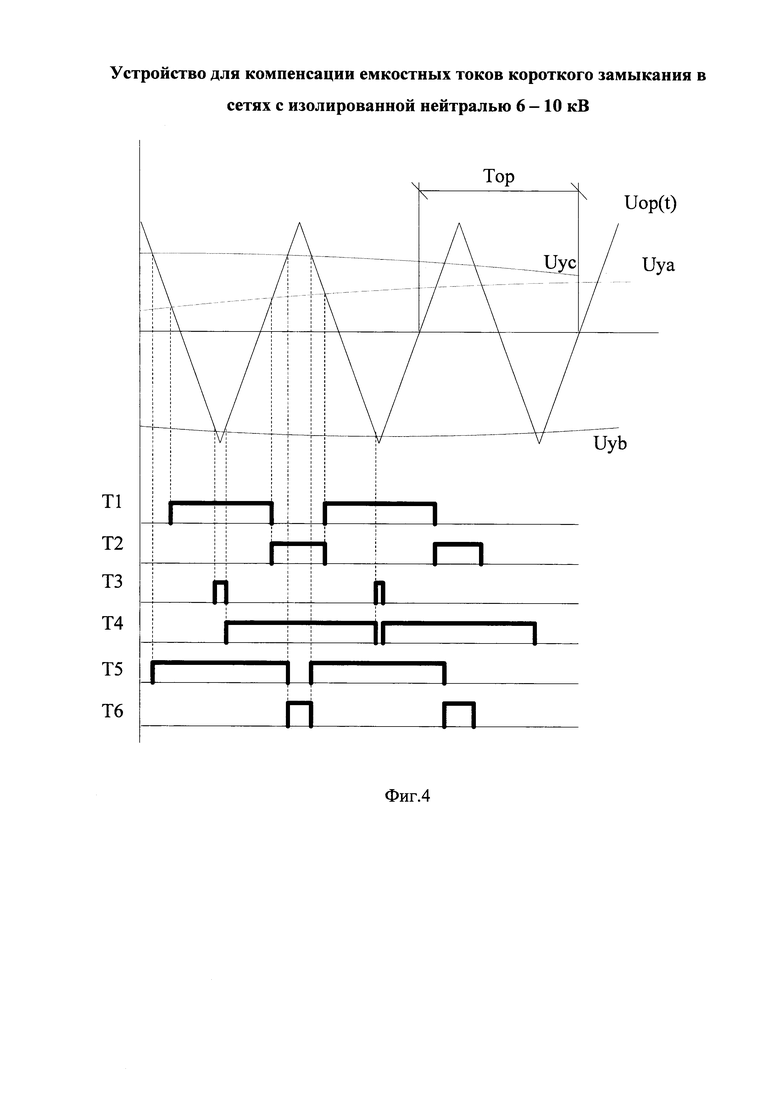
На фиг. 1 изображена структурная схема предлагаемого устройства, на фиг. 2 изображена структурная схема системы управления устройством, на фиг. 3 изображен пример выполнения статического преобразователя электрической энергии, на фиг. 4 изображены импульсы управления, вырабатываемые системой управления.
Структурная схема предлагаемого устройства (фиг. 1) содержит трехфазный статический преобразователь электрической энергии (1), соединенный с датчиками тока и системой управления, систему управления (2), соединенную с трехфазным статическим преобразователем электрической энергии, разъединителем, измерителем, датчиками тока, датчиками напряжения, которая формирует импульсы управления трехфазным статическим преобразователем электрической энергии, для формирования тока нулевой последовательности, необходимого для компенсации емкостного тока короткого замыкания, измеритель для измерения текущей емкости сети и расчета требуемого индуктивного тока (3), соединенный с системой управления, датчики тока (4), обеспечивающие слежение за выходным током трехфазного статического преобразователя электрической энергии, соединенные с трехфазным разъединителем и трехфазным статическим преобразователем электрической энергии, трехфазный разъединитель (5), одни концы которого соединяются с фазами сети, а другие - с датчиком тока, датчики напряжения (6), соединенные с системой управления.
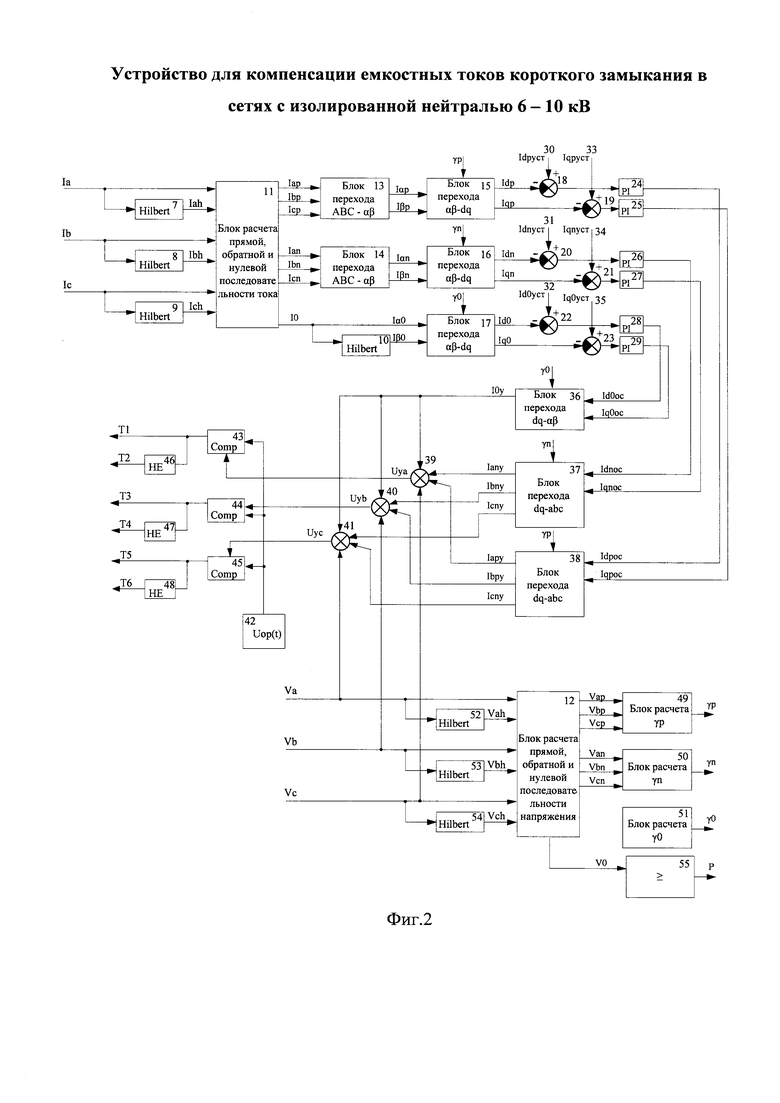
Структурная схема системы управления данным устройством (фиг. 2) содержит преобразователи Гильберта (7, 8, 9, 10), блок расчета прямой, обратной и нулевой последовательности тока (11), блок расчета прямой, обратной и нулевой последовательности напряжения (12), блоки перехода из системы координат ABC в систему координат αβ (13, 14), блоки перехода из системы координат αβ в стационарную систему координат dq (15, 16, 17), схемы вычитания (18, 19, 20, 21, 22, 23), пропорционально-интегральные регуляторы (24, 25, 26, 27, 29), блоки задания уставок (30, 31, 32, 33, 34, 35), блок перехода из стационарной системы координат dq в систему координат αβ (36), блоки перехода из стационарной системы координат dq в систему координат ABC (37, 38), схемы суммирования (39, 40, 41), генератор опорного напряжения (42), компараторы (43, 44, 45), логические устройства НЕ (46, 47, 48), блоки расчета угла γ для прямой и обратной последовательности (49, 50), блок расчета угла γ0 для нулевой последовательности (51), преобразователи Гильберта (52, 53, 54), блок сравнения (55). Причем преобразователи Гильберта (7, 8, 9) соединены с датчиками тока (4, см. фиг. 1) и блоком расчета прямой, обратной и нулевой последовательности тока (11), блок расчета прямой, обратной и нулевой последовательности тока (11) соединен с преобразователями Гильберта (7, 8, 9), датчиками тока (4, см. фиг. 1), блоками перехода из системы координат ABC в систему координат αβ (13, 14), блоком перехода из системы координат αβ в стационарную систему координат dq (17), преобразователем Гильберта (10), преобразователь Гильберта (10) соединен с блоком расчета прямой, обратной и нулевой последовательности тока (11) и блоком перехода из системы координат αβ в стационарную систему координат dq (17), блоки перехода из системы координат ABC в систему координат αβ (13, 14) соединены с блоком расчета прямой, обратной и нулевой последовательности тока (11) и блоками перехода из системы координат αβ в стационарную систему координат dq (15, 16), блоки перехода из системы координат αβ в стационарную систему координат dq (15, 16) соединены с блоками перехода из системы координат ABC в систему координат αβ (13, 14), блоками расчета угла γ для прямой и обратной последовательности (49, 50), схемами вычитания (18, 19, 20, 21), блок перехода из системы координат αβ в стационарную систему координат dq (17) соединен с блоком расчета прямой, обратной и нулевой последовательности тока (11), преобразователем Гильберта (10), блоком расчета угла γ для нулевой последовательности (51) и схемами вычитания (22, 23), схемы вычитания (18, 19, 20, 21, 23) соединены с блоками перехода из системы координат αβ в стационарную систему координат dq (15, 16, 17), блоками задания уставок (30, 31, 33, 34, 35), пропорционально-интегральными регуляторами (24, 25, 26, 27, 29), схема вычитания (22) соединена с блоком перехода из системы координат αβ в стационарную систему координат dq (17), пропорционально-интегральным регулятором (28), блоком (32), куда записывается значение тока, измеренное измерителем (4, см. фиг. 1), блоки задания уставок (30, 31, 33, 34, 35) соединены со схемами вычитания (18, 19, 20, 21, 23), блок (32) соединен со схемой вычитания (22) и измерителем (4, см. фиг. 1), пропорционально-интегральные регуляторы (24, 25, 26, 27) соединены со схемами вычитания (18, 19, 20, 21) и блоками перехода из стационарной системы координат dq в систему координат ABC (37, 38), пропорционально-интегральные регуляторы (28, 29) соединены со схемами вычитания (22, 23) и блоком перехода из стационарной системы координат dq в систему координат αβ (36), блок перехода из стационарной системы координат dq в систему координат αβ (36) соединен с пропорционально-интегральными регуляторами (28, 29), блоком расчета угла γ для нулевой последовательности (51) и схемами суммирования (39, 40, 41), блоки перехода из стационарной системы координат dq в систему координат ABC (37, 38) соединены с пропорционально-интегральными регуляторами (24, 25, 26, 27), блоками расчета угла γ для прямой и обратной последовательности (49, 50), схемами суммирования (39, 40, 41), схемы суммирования (39, 40, 41) соединены с блоками перехода из стационарной системы координат dq в систему координат ABC (37, 38), блоком перехода из стационарной системы координат dq в систему координат αβ (36), датчиками напряжения (6, см. фиг. 1), компараторами (43, 44, 45), компараторы (43, 44, 45) соединены со схемами суммирования (39, 40, 41), генератором опорного напряжения (42), логическими устройствами НЕ (46, 47, 48), логические устройства НЕ (46, 47, 48) соединены с компараторами (43, 44, 45), генератор опорного напряжения (42) соединен с компараторами (43, 44, 45), преобразователи Гильберта (52, 53, 54) соединены с датчиками напряжения (6, см. фиг. 1) и блоком расчета прямой, обратной и нулевой последовательности напряжения (12), блок расчета прямой, обратной и нулевой последовательности напряжения (12) соединен с преобразователями Гильберта (52, 53, 54), датчиками напряжения (6, см. фиг. 1), блоком сравнения (55) и блоками расчета угла γ для прямой и обратной последовательности, блок сравнения (55) соединен с блоком расчета прямой, обратной и нулевой последовательности напряжения (12) и трехфазным разъединителем (5, см. фиг. 1), блоки расчета угла γ для прямой и обратной последовательности (49, 50) соединены с блоком расчета прямой, обратной и нулевой последовательности напряжения (12), блоками перехода из системы координат αβ в стационарную систему координат dq (15, 16), блоками перехода из стационарной системы координат dq в систему координат ABC (37, 38), блок расчета угла γ для нулевой последовательности (51) соединен с блоком перехода из системы координат αβ в стационарную систему координат dq (17) и блоком перехода из стационарной системы координат dq в систему координат αβ (36).
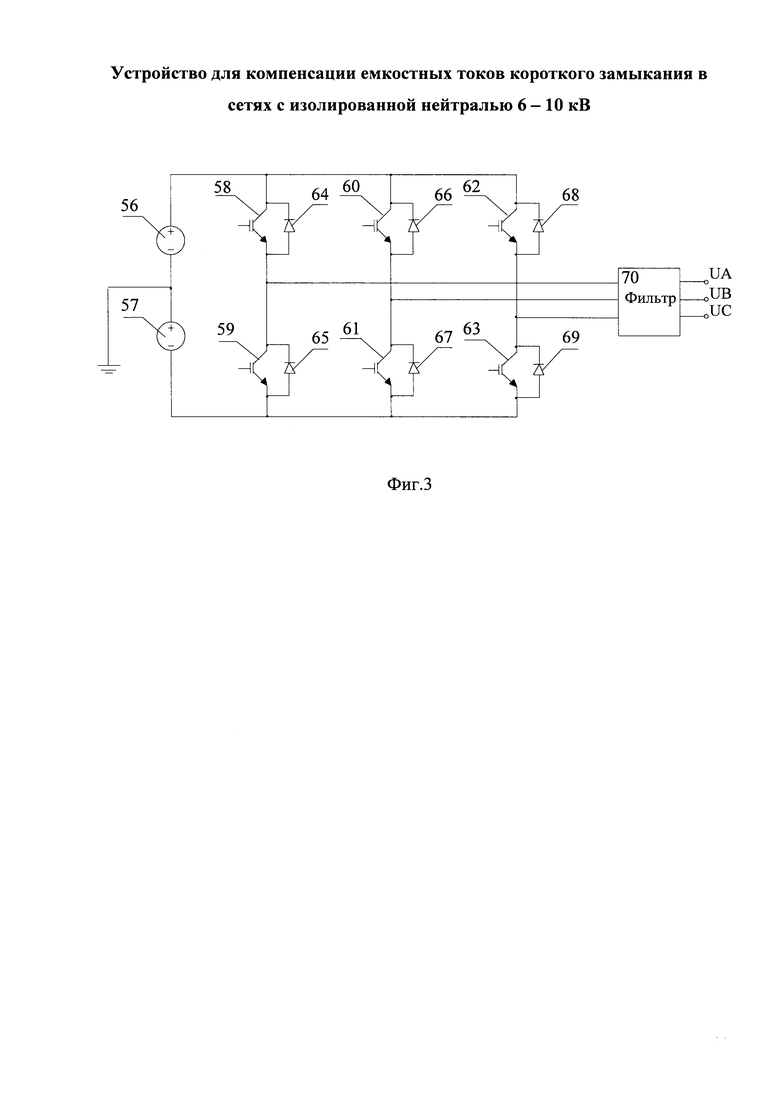
Статический преобразователь электрической энергии (фиг. 3) содержит два источника постоянного напряжения с напряжением Udc (56), (57), средняя точка которых подключена к земле, полупроводниковые элементы, например транзисторы (58, 59, 60, 61, 62, 63), с обратно включенными диодами (64, 65, 66, 67, 68, 69), средние точки которых подключаются к фильтру (70), трехфазный фильтр (70), который подключается к средним точкам транзисторов (58, 59, 60, 61, 62, 63) и через датчики тока (4, см. фиг. 1) и трехфазный разъединитель (5, см. фиг. 1) к фазам сети.
Блок (1) представляет собой трехфазный статический преобразователь электрической энергии (фиг. 3), содержащий два источника постоянного напряжения с напряжением Udc (56), (57), средняя точка которых подключена к земле, полупроводниковые элементы, например транзисторы (58, 59, 60, 61, 62, 63), с обратно включенными диодами (64, 65, 66, 67, 68, 69), средние точки которых подключаются к фильтру (70). Система управления (2) представляет собой замкнутую систему с контурами по прямой, обратной и нулевой последовательности, с отрицательными обратными связями по току и положительными обратными связями по напряжению. Для расчета прямой, обратной и нулевой последовательности используется блок (11), рассчитывающий последовательности по методу, описанному в Харитонов С.А., Берестов В.М., Харитонов А.С. Обобщенный метод симметричных составляющих и его применение для управления преобразователем частоты в составе системы генерирования переменного тока. Технiчна електродинамiка. Тематический выпуск. Силова електронiка та енергоефективнiсть. Частина 1. Киiв, 2004. - С. 57-63. Согласно этому методу прямую, обратную и нулевую последовательность можно выделить по формулам (1):
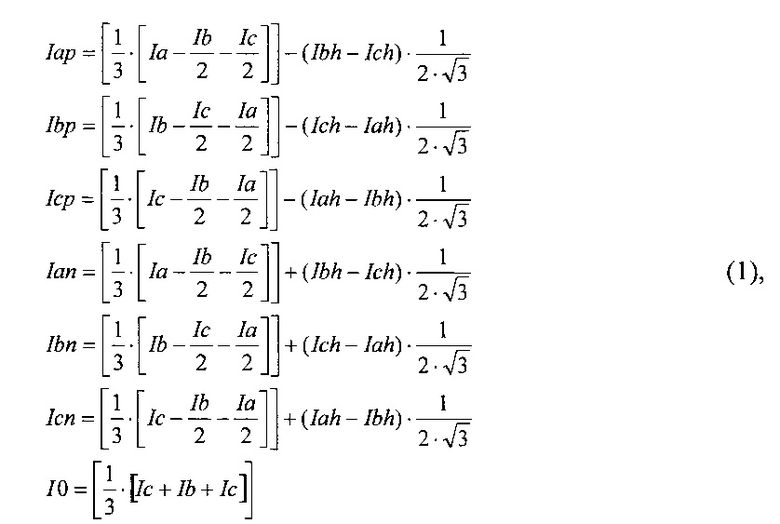
где Iap, Ibp, Icp - токи прямой последовательности;
Ian, Ibn, Icn - токи обратной последовательности;
I0 - ток нулевой последовательности;
Iah, Ibh, Ich - гильбертовы преобразования токов Ia, Ib, Ic, представляющие собой сдвинутые на -π/2, относительно токов Ia, Ib, Ic.
Далее система управления разделяется на три контура по прямой, обратной и нулевой последовательности. Контур по прямой последовательности включает в себя блок перехода из системы координат АВС в систему координат αβ (13), в который заводятся токи прямой последовательности Iap, Ibp, Icp и рассчитываются величины Iαp, Iβp по формулам (2):

Далее сигналы Iαp, Iβp заводятся в блок перехода из системы координат αβ в стационарную систему координат dq (15) и рассчитываются величины Idp, Iqp по формулам (3):

где γp - угол, который рассчитывается блоком (49).
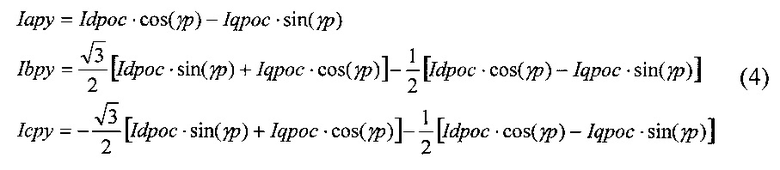
Далее реализована отрицательная обратная связь по току из схем вычитания (18, 19) и блоков задания уставок по прямой последовательности (30, 33), в которые записываются величины задания тока прямой последовательности. Далее сигналы рассогласования заводятся на пропорционально-резонансные регуляторы (24, 25), на выходе которых получается сигналы обратной связи по прямой последовательности Idpoc, Iqpoc. Сигналы обратной связи Idpoc, Iqpoc заводятся на блок перехода из стационарной системы координат dq в систему координат ABC (38), который рассчитывает величины Iapy, Ibpy, Icpy сигналов управления по прямой последовательности по формулам (4):
Контур по обратной последовательности включает в себя блок перехода из системы координат ABC в систему координат αβ (14), в который заводятся токи обратной последовательности Ian, Ibn, Icn и рассчитываются величины Iαn, Iβn по формулам (5):

Далее сигналы Iαn, Iβn заводятся в блок перехода из системы координат αβ в стационарную систему координат dq (15) и рассчитываются величины Idn, Iqn по формулам (6):

где γn - угол, который рассчитывается блоком (50).
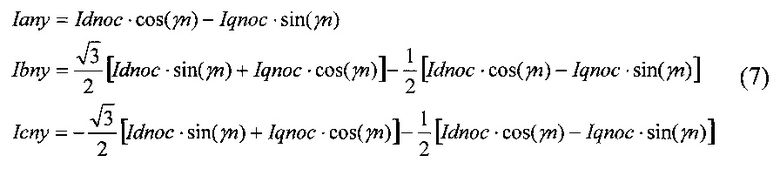
Далее реализована отрицательная обратная связь по току из схем вычитания (20, 21) и блоков задания уставок по обратной последовательности (31, 34), в которые записываются величины задания тока обратной последовательности. Далее сигналы рассогласования заводятся на пропорционально-резонансные регуляторы (26, 27), на выходе которых получается сигналы обратной связи по обратной последовательности Idnoc, Iqnoc. Сигналы обратной связи Idnoc, Iqnoc заводятся на блок перехода из стационарной системы координат dq в систему координат ABC (37), который рассчитывает величины Iany, Ibny, Icny сигналов управления по обратной последовательности по формулам (7):
Контур по нулевой последовательности включает в себя преобразователь Гильберта (10), используемый для сдвига тока нулевой последовательности I0 на угол -π/2. Таким образом, осуществляется переход в систему координат αβ0, согласно методу, описанному в (Kharitonov S.A., Zhoraev T.J. Generalized method of symmetrical components and them extraction using phase rotating digital filter. Sscience Bulletin of NSTU. -. - №1(34), Novosibirsk, NSTU, 2009, p. 191-203 (in Russian)). Далее сигналы Iα0, Iβ0 заводятся в блок перехода из системы координат αβ в стационарную систему координат dq (17), который рассчитывает величины Id0, Iq0 по формулам (8):

где γ0 - угол, который рассчитывается блоком (51).
Далее реализована отрицательная обратная связь по току из схем вычитания (22, 23) и блоков задания уставок по нулевой последовательности (32, 35). В блок (32) записывается величина, измеренная и рассчитанная измерителем (3, см. фиг. 1). Сигналы рассогласования заводятся на пропорционально-резонансные регуляторы (28, 29), на выходе которых получаются сигналы обратной связи по нулевой последовательности Id0oc, Iq0oc. Сигналы обратной связи Id0oc, Iq0oc заводятся на блок перехода из стационарной системы координат dq в систему координат αβ (36), который рассчитывает сигналы I0y управления по нулевой последовательности по формуле (9):

Далее сигналы Iapy, Iany, I0γ и сигнал компенсационной положительной обратной связи по напряжению Va с датчика напряжения (6, см. фиг. 1) суммируются схемой суммирования (39), сигналы Ibpy, Ibny, 10γ и сигнал компенсационной положительной обратной связи по напряжению Vb с датчика напряжения (6, см. фиг. 1) суммируются схемой суммирования (40), сигналы Icpy, Icny, 10γ и сигнал компенсационной положительной обратной связи по напряжению Vc с датчика напряжения (6, см. фиг. 1) суммируются схемой суммирования (41). Полученные сигналы Ua, Ub, Uc являются модулирующими сигналами для широтно-импульсного модулятора, состоящего из блоков (42, 43, 44, 45, 46, 47, 48). Модулирующие сигналы Ua, Ub, Uc и сигнал с генератора опорного напряжения (42) заводятся на соответственно компараторы (43, 44, 45). Сигнал с компаратора (43) является сигналом управления для транзистора (58) (фиг. 3, 4), а другой, подающийся на логическое устройство НЕ (46) для транзистора (59) (фиг. 3, 4). Сигнал с компаратора (44) является сигналом управления для транзистора (60) (фиг. 3, 4), а другой, подающийся на логическое устройство НЕ (47) для транзистора (61) (фиг. 3, 4). Сигнал с компаратора (45) является сигналом управления для транзистора (62) (фиг. 3, 4), а другой, подающийся на логическое устройство НЕ (48) для транзистора (63) (фиг. 3, 4).
Также система управления содержит блок расчета прямой, обратной и нулевой последовательности напряжения (12), который рассчитывает прямую, обратную и нулевую последовательность напряжения по формулам (10):
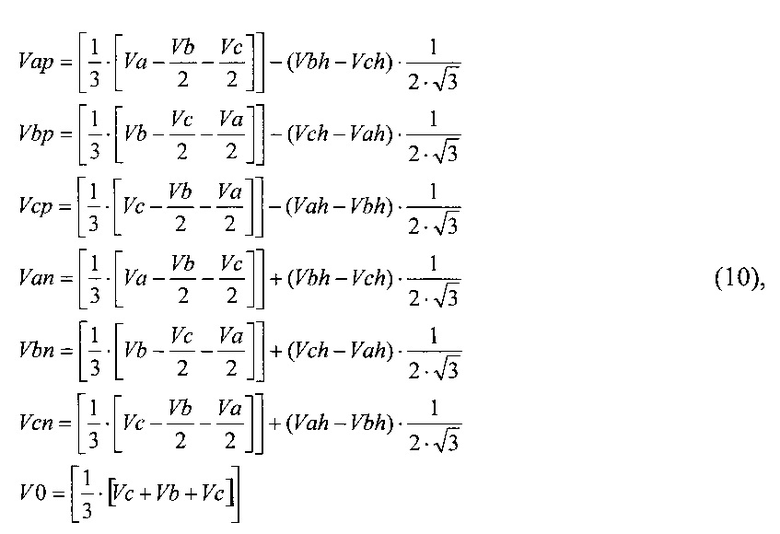
где Vap, Vbp, Vcp - напряжения прямой последовательности;
Van, Vbn, Vcn - напряжения обратной последовательности;
V0 - напряжение нулевой последовательности;
Vah, Vbh, Vch - гильбертовы преобразования напряжений Va, Vb, Vc, представляющие собой сдвинутые на -π/2, относительно напряжений Va, Vb, Vc.
Далее сигналы Vap, Vbp, Vcp заводятся на блок расчета угла γp (49) для прямой последовательности, сигналы Vap, Vbp, Vcp заводятся на блок расчета угла γn (50) для обратной последовательности. Также система управления содержит блок расчета угла γ0 (51) для обратной последовательности. Величины γp, γn, γ0 рассчитываются по формулам (11) и заводятся в блоки (15, 16, 17) соответственно и (38, 37, 36) соответственно:
где f - частота сети.
Таким образом, вращающиеся системы координат dq для прямой и обратной последовательности тока привязываются к напряжению сети.
Сигнал V0 с выхода блока (12) заводится в блок сравнения (55), который при превышении определенного уровня V0 определяет возникновение короткого замыкания и вырабатывает импульс для включения трехфазного разъединителя.
Блок (3) представляет собой измеритель текущей емкости сети для расчета задания на ток индуктивности в блок задания уставки (32), например устройство для измерения емкости сети с изолированной нейтралью (RU 2169375, http://ru-patent.info/21/65-69/2169375.html). Блок (5) представляет собой высоковольтный трехфазный разъединитель, включенный между фазами сети и датчиками тока (4).
Предлагаемое устройство функционирует следующим образом.
В нормальном режиме работы сети (при отсутствии короткого замыкания) трехфазный разъединитель отключен (5), измеритель (4) определяет текущую емкость сети и требуемый индуктивный ток, для настройки в резонанс и компенсации, величина которого записывается в блок задания уставки (32) (см. фиг. 2).
При возникновении короткого замыкания в сети появляется напряжение нулевой последовательности. Блок (12) расчета прямой, обратной и нулевой последовательности напряжения выделяет нулевую последовательность напряжения, величина которой в режиме короткого замыкания превышает значение уставки блока сравнения (55), и на его выходе образуется импульс, который включает трехфазный разъединитель (5) (см. фиг. 1). Система управления начинает отрабатывать нулевые уставки по прямой и обратной последовательности, записанные в блоках задания уставок (30, 31, 33, 34), а также нулевую уставку по q-составляющей нулевой последовательности, записанной в блоке задания уставки (35). На выходе суммирующих устройств (39, 40, 41) появляются модулирующие сигналы. Модулирующие сигналы Ua, Ub, Uc сравниваются компараторами (43, 44, 45) с опорным напряжением, и система управления вырабатывает импульсы управления Т1-Т6 для управления транзисторами (58, 59, 60, 61, 62, 63). Трехфазный инвертор начинает вырабатывать ток нулевой последовательности индуктивного характера, равный по величине записанному в блоке задания уставки (32), то есть измеренному измерителем (3) и равным емкостному току сети. Соответственно, индуктивный ток, вырабатываемый преобразователем, полностью компенсирует емкостной ток короткого замыкания.
Быстродействие предлагаемого устройства увеличивается за счет введения замкнутой системы управления устройством по прямой, обратной и нулевой последовательности. Для управления статическим преобразователем электрической энергии по прямой, нулевой и обратной последовательности необходимо выполнить его трехфазным. Введение замкнутой системы управления с обратными связями по каждой последовательности, которая независимо управляет прямой, обратной и нулевой последовательностью тока, позволяет более тонко чувствовать изменения напряжения сети и выходного тока преобразователя и своевременно реагировать на эти изменения.
Кроме того, уменьшается масса и габариты устройства по сравнению с прототипом за счет выполнения статического преобразователя электрической энергии трехфазным, что устраняет необходимость подключать преобразователь к сети через специальный нейтралеобразующий трансформатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2008 |
|
RU2394346C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ, ИСПОЛЬЗУЕМЫЕ ПРИ ШУНТИРОВАНИИ БЛОКОВ ПИТАНИЯ | 2012 |
|
RU2518093C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ ПРИ ЕЕ НЕСИММЕТРИИ | 2011 |
|
RU2460194C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ ПРИ ЕЕ НЕСИММЕТРИИ | 2011 |
|
RU2472269C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ, СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2010 |
|
RU2452076C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2442275C1 |
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2011 |
|
RU2475914C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2380820C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2381609C1 |
Использование: в области электротехники для компенсации емкостных токов короткого замыкания и подавления токов утечки, вызванных естественной несимметрией емкостей фаз на землю в сетях с изолированной нейтралью 6-10 кВ. Технический результат - повышение быстродействия и обеспечение возможности управления по прямой и обратной последовательности тока. Устройство содержит трехфазный разъединитель, измеритель, систему управления, трехфазный статический преобразователь электрической энергии, датчик тока, датчик напряжения, причем фазы статического преобразователя электрической энергии соединены с сетью через датчик тока, соединенный с трехфазным разъединителем, соединенным с фазами сети и системой управления, которая соединена с измерителем, датчиком тока, датчиком напряжения, трехфазным статическим преобразователем электрической энергии, и содержит преобразователи Гильберта, блок расчета прямой, обратной и нулевой последовательности тока и напряжения, блоки перехода из системы координат ABC в систему координат αβ, блоки перехода из системы координат αβ в стационарную систему координат dq, схемы вычитания, блоки задания уставок, блоки пропорционально-интегральных регуляторов, блок перехода из стационарной системы координат dq в систему координат αβ, блоки перехода из стационарной системы координат dq в систему координат ABC, схемы суммирования, генератор опорного напряжения, компараторы, логические устройства НЕ, блоки расчета угла γ, блок сравнения, соединенные соответствующим образом. 4 ил.
Устройство компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ, содержащее трехфазный разъединитель, соединенный с фазами сети и системой управления, которая соединена с измерителем, статическим преобразователем электрической энергии, отличающееся тем, что в него введены датчик тока, датчик напряжения, а указанный статический преобразователь электрической энергии выполнен трехфазным и соединен с землей, причем фазы статического преобразователя электрической энергии соединены с сетью через датчик тока, соединенный с трехфазным разъединителем, а система управления соединена с датчиком тока, датчиком напряжения, трехфазным статическим преобразователем электрической энергии, и содержит преобразователи Гильберта тока, соединенные с блоком расчета прямой, обратной и нулевой последовательности тока, который соединен с входами блоков перехода из системы координат ABC в систему координат αβ, преобразователем Гильберта нулевой последовательности и блоком перехода из системы координат αβ в стационарную систему координат dq для нулевой последовательности, другой вход которого соединен с преобразователем Гильберта нулевой последовательности, а выходы соединены со схемами вычитания нулевой последовательности, другие входы которых соединены с блоками задания уставок нулевой последовательности, а выходы - с блоками пропорционально-интегральных регуляторов по нулевой последовательности, блоки перехода из системы координат ABC в систему координат αβ, выходы которых соединены с входами блоков перехода из системы координат αβ в стационарную систему координат dq, выходы которых соединены с входами схем вычитания прямой и обратной последовательности, другие входы которых соединены с блоками задания уставок прямой и обратной последовательности, а выходы соединены с входами блоков пропорционально-интегральных регуляторов прямой и обратной последовательности, блоки пропорционально-интегральных регуляторов по прямой и обратной последовательности, соединенные с блоками перехода из стационарной системы координат dq в систему координат ABC, выходы которых соединены со схемами суммирования, блоки пропорционально-интегральных регуляторов по нулевой последовательности соединены с блоком перехода из стационарной системы координат dq в систему координат αβ для нулевой последовательности, выход которого соединен со схемами суммирования, схемы суммирования, выходы которых соединены с входами компараторов, другие входы которых соединены с генератором опорного напряжения, а выходы - с логическими устройствами НЕ, преобразователи Гильберта напряжения соединены с блоком расчета прямой, обратной и нулевой последовательности напряжения, который соединен с блоками расчета углов γр, γn и блоком сравнения, блок расчета угла γр, выход которого соединен с одним из входов блока перехода из системы координат αβ в стационарную систему координат dq для прямой последовательности и одним из входов блока перехода из системы координат dq в систему координат ABC для прямой последовательности, блок расчета угла γn, выход которого соединен с одним из входов блока перехода из системы координат αβ в стационарную систему координат dq для обратной последовательности и одним из входов блока перехода из системы координат dq в систему координат ABC для обратной последовательности, блок расчета угла γ0, выход которого соединен с одним из входов блока перехода из системы координат αβ в стационарную систему координат dq для нулевой последовательности и с одним из входов блока перехода из стационарной системы координат dq в систему координат αβ для нулевой последовательности, причем преобразователи Гильберта напряжения соединены с датчиками напряжения, а преобразователи Гильберта тока - с датчиками тока, блок расчета прямой, обратной и нулевой последовательности тока соединен с датчиками тока, блок расчета прямой, обратной и нулевой последовательности напряжения соединен с датчиками напряжения, блок задания уставок по d-составляющей нулевой последовательности тока соединен с измерителем, схемы суммирования соединены с датчиками напряжения, выходы компараторов и логических устройств НЕ соединены с транзисторами трехфазного статического преобразователя электрической энергии, блок сравнения соединен с трехфазным разъединителем.
| ЦЕПНОЕ ДОЛОТО МНОГОКРАТНОГО ДЕЙСТВИЯ | 1961 |
|
SU148769A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ДУГОГАСЯЩЕГО РЕАКТОРА | 2009 |
|
RU2404501C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ОДНОФАЗНЫХ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ И ОГРАНИЧЕНИЯ ВНУТРЕННИХ ПЕРЕНАПРЯЖЕНИЙ В ВЫСОКОВОЛЬТНЫХ СЕТЯХ | 2003 |
|
RU2284083C2 |
| US 2008157728 A1, 03.07.2008. | |||

