Область техники, к которой относится изобретение
Предлагаемое изобретение относится к топологической структуре каскадного инвертора. Точнее говоря, предлагаемое изобретение относится к устройству управления и способу управления топологической структурой, которые используют при шунтировании блоков питания.
Описание технических решений из связанной области техники
В настоящее время обычный инвертор среднего, высокого напряжения используется как устройство, обеспечивающее номинальное напряжение устройств питания, и, кроме того, его топологическая структура обычно приспособлена для снижения уровня гармоник выходного напряжения. В топологической структуре каждая фаза составлена из нескольких последовательно соединенных блоков питания с низким номинальным напряжением и позволяет выдавать высокое напряжение. Однако из-за большого числа блоков питания надежность системы может быть низкой, т.к. возможны отказы одного или нескольких блоков питания. В настоящее время отказавший блок питания необходимо шунтировать, а оставшимися блоками питания управляют для выдачи трехфазного напряжения, обеспечивающего непрерывную работу всей системы с каскадным инвертором. При этом после шунтирования отказавшего блока питания исходный способ управления необходимо изменить, иначе трехфазное выходное напряжение будет несимметричным.
В устройствах известного уровня техники используют три распространенных технических решения. Первое состоит в шунтировании одинаковых каскадов. Когда происходит отказ в нескольких блоках питания в одной фазе, управляют соответствующими блоками питания в том же каскаде двух других фаз, чтобы шунтировать их, даже если они исправны, так, что одинаковое число блоков питания в каждой фазе обеспечивает работу. Однако этот способ управления выводит из действия исправные блоки питания и существенно снижает выходное напряжение. Второй способ состоит в уменьшении управляющего напряжения. А именно, уменьшают управляющее напряжение фазы, имеющей меньше отказавших блоков питания, чтобы обеспечить равенство выходных напряжений фаз. Однако при использовании этого способа не только существенно снижается выходное напряжение, но также сильно отличаются выходные мощности блоков управления, и они имеет разную нагрузку. Третий способ состоит в смещении напряжения нейтрали. Т.е. при возникновении отказов в одном или нескольких блоках питания в одной фазе за счет изменения разности фаз между всеми фазами обеспечивается возможность поддерживать по-прежнему симметричные линейные напряжения на выходе даже при несимметричных фазных напряжениях (поскольку к нагрузке приложено линейное напряжение). Однако этот способ управления требует учета всех возможных сочетаний блоков питания, шунтируемых в каждой из фаз, и необходимо заранее рассчитать угол сдвига фаз между каждыми двумя фазами для каждого сочетания после шунтирования. Поэтому требуется большой объем памяти в контроллере. Кроме того, так как должно быть отдельное управление каждой фазой, способ не пригоден при использовании принципа широтно-импульсной модуляции пространственного вектора ШИМПВ (SVPWM). Поэтому его применение ограничено с точки зрения векторного управления преобразователя.
В связи с изложенным многие специалисты в промышленности ищут пути решения задачи управления каскадным инвертором при шунтировании блоков питания, обеспечивающего эффективное решение и устраняющего недостатки и неудобства рассмотренного выше способа управления.
СУТЬ ИЗОБРЕТЕНИЯ
Учитывая недостатки способа управления, известного из уровня техники, используемого при шунтировании блоков питания, в настоящем изобретении предложены соответствующие устройство и способ управления.
В соответствии с одним аспектом предлагаемого изобретения предложено устройство управления, используемое при шунтировании блоков питания, пригодное для симметрирования трехфазного выходного напряжения каскадного инвертора. Устройство управления содержит:
измерительный модуль для измерения трехфазных выходных напряжений;
вычислительный модуль для вычисления составляющей обратной последовательности трехфазного выходного напряжения;
компенсационный модуль для обеспечения заданной составляющей обратной последовательности и автоматической компенсации на основе составляющей обратной последовательности, формируемой вычислительным модулем согласно заданной составляющей обратной последовательности для вывода компенсированной составляющей обратной последовательности, и
выходной модуль для сложения компенсированной составляющей обратной последовательности с заданием трехфазного выходного напряжения и вывода нового трехфазного выходного напряжения с использованием заданного режима модуляции.
Заданный режим модуляции - это синусоидальная широтно-импульсная модуляция СШИМ (SPWM) или широтно-импульсная модуляция пространственного вектора ШИМПВ (SVPWM). В соответствии с другим аспектом предлагаемого изобретения предложен способ управления, используемый при шунтировании блоков питания, пригодный для симметрирования трехфазного выходного напряжения каскадного инвертора. Способ управления включает в себя следующие операции:
измерение трехфазного выходного электрического сигнала с помощью измерительного модуля;
соответственно вычисление составляющих прямой и обратной последовательностей трехфазного выходного электрического сигнала с помощью вычислительного модуля;
формирование заданных составляющих прямой и обратной последовательностей с помощью компенсационного модуля и автоматическая компенсация составляющих прямой и обратной последовательностей для вывода новых составляющих прямой и обратной последовательностей и
сложение новых составляющих прямой и обратной последовательностей и вывод нового трехфазного выходного электрического сигнала с использованием заданного режима модуляции.
Заданный режим модуляции - это синусоидальная широтно-импульсная модуляция СШИМ (SPWM) или широтно-импульсная модуляция пространственного вектора ШИМПВ (SVPWM).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные аспекты предлагаемого изобретения будут более ясно описаны и понятны в связи с приведенными ниже характерными вариантами реализации предлагаемого изобретения со ссылками на прилагаемые чертежи. В чертежах:
на фиг.1 показана упрощенная схема способа управления каскадным инвертором при шунтировании блоков питания из уровня техники, на фиг.2 показана упрощенная схема другого способа управления каскадным инвертором при шунтировании блоков питания из уровня техники, на фиг.3А и 3В показаны упрощенные схемы еще одного способа управления каскадным инвертором при шунтировании различных блоков питания из уровня техники,
на фиг.4 показана блок-схема последовательности операций способа управления каскадным инвертором при шунтировании блоков питания в соответствии с вариантом реализации предлагаемого изобретения,
на фиг.5 показан частный вариант реализации управления выходным напряжением на основе способа управления, показанного на фиг.4, на фиг.6 показан другой частный вариант реализации управления выходным напряжением на основе способа управления, показанного на фиг.4, на фиг.7 показана блок-схема последовательности операций способа управления каскадным инвертором при шунтировании блоков питания в соответствии с другим вариантом реализации предлагаемого изобретения, на фиг.8 показан частный вариант реализации управления выходным напряжением на основе способа управления, показанного на фиг.7, и на фиг.9 показан другой частный вариант реализации управления выходным напряжением на основе способа управления, показанного на фиг.7.
ПОДРОБНОЕ ОПИСАНИЕ
Для того чтобы сделать описание предлагаемого изобретение более подробным и полным, ниже рассматриваются различные варианты реализации изобретения со ссылками на прилагаемые чертежи. Одинаковые или подобные элементы на чертежах имеют одни и те же номера позиций. Однако обычным специалистам в данной области техники должно быть понятно, что варианты реализации изобретения, описанные ниже, не ограничивают объем предлагаемого изобретения. Более того, прилагаемые чертежи являются только иллюстративными и выполнены не в масштабе.
В подробном описании и в формуле этой заявки словосочетание «соединен с» может вообще относиться к тому, что компонент соединен с другим компонентом не прямо, а через другой компонент, или что он соединен непосредственно с другим компонентом без других промежуточных компонентов.
В подробном описании и в формуле этой заявки, за исключением абзацев, определенно ограниченных контекстом, все упоминания объектов подразумевают также и множественное число.
Слова «около», «приблизительно» или «ориентировочно» используются для определения любого небольшого отклонения, не влияющего на сущность величины. В вариантах реализации изобретения ошибка в величине, определяемая словами «около», «приблизительно» или «ориентировочно», находится в пределах 20%, предпочтительно 10% и еще лучше 5%, если не указано иное точное значение.
Как отмечалось выше, в топологической структуре каскадного инвертора каждая фаза образована последовательным соединением нескольких блоков питания. При нормальной работе всех блоков питания трехфазное выходное напряжение поддерживается симметричным (т.е. линейные напряжения между двумя соседними фазами равны) для питания нагрузки линейным напряжением. Однако при возникновении отказа одного или нескольких блоков питания отказавшие блоки питания должны быть зашунтированы. При этом после шунтирования соответствующим способом поддерживают практически симметричное трехфазное выходное напряжение.
Кроме того, отметим, что в описании предлагаемого изобретения термины «трехфазное выходное напряжение» и «составляющая последовательности» означают физические напряжения или команды (сигналы).
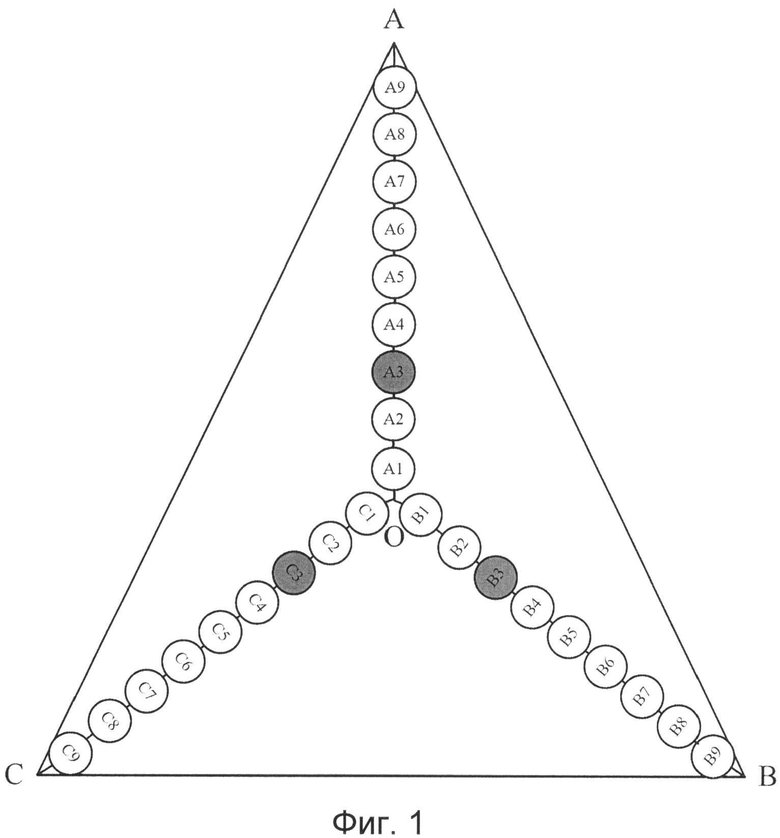
На фиг.1 показана схема применения известного способа управления в каскадном инверторе при шунтировании блоков питания.
В соответствии со схемой на фиг.1 соединительная линия между точками А и О представляет фазу А, включающую в себя 9 соединенных последовательно блоков питания А1-А9. Соединительная линия между точками В и О представляет фазу В, включающую в себя 9 соединенных последовательно блоков питания В1-В9. Соединительная линия между точками С и О представляет фазу С, включающую в себя 9 соединенных последовательно блоков питания С1-С9. Отрезки линий АВ, ВС и СА представляют линейные напряжения. При отказе блока питания A3 в фазе А блок питания A3 шунтируют. При этом, поскольку число блоков питания в нормальном рабочем состоянии в фазе А уменьшилось с 9 до 8, происходит уменьшение фазного напряжения фазы А. Поэтому возникает асимметрия трехфазных линейных напряжений АВ, ВС и СА.
Для того чтобы решить эту проблему, при использовании обычного способа управления шунтируют блоки питания в двух других фазах, а именно блоки В3 и С3, показанные на фиг.1 и соответствующие блоку питания A3. Так, если напряжение каждой фазы А, В и С равно U, то каждый блок питания обеспечивает напряжения 1/9U. То есть после того как блоки питания A3, В3 и С3 зашунтированы, фазное напряжение каждой из трех фаз будет уменьшено до 8/9U. Хотя способ управления позволяет достичь симметрирования напряжений, исправные блоки питания В3 и С3 оказываются выведенными из действия и к тому же выходное напряжение стало значительно меньше.
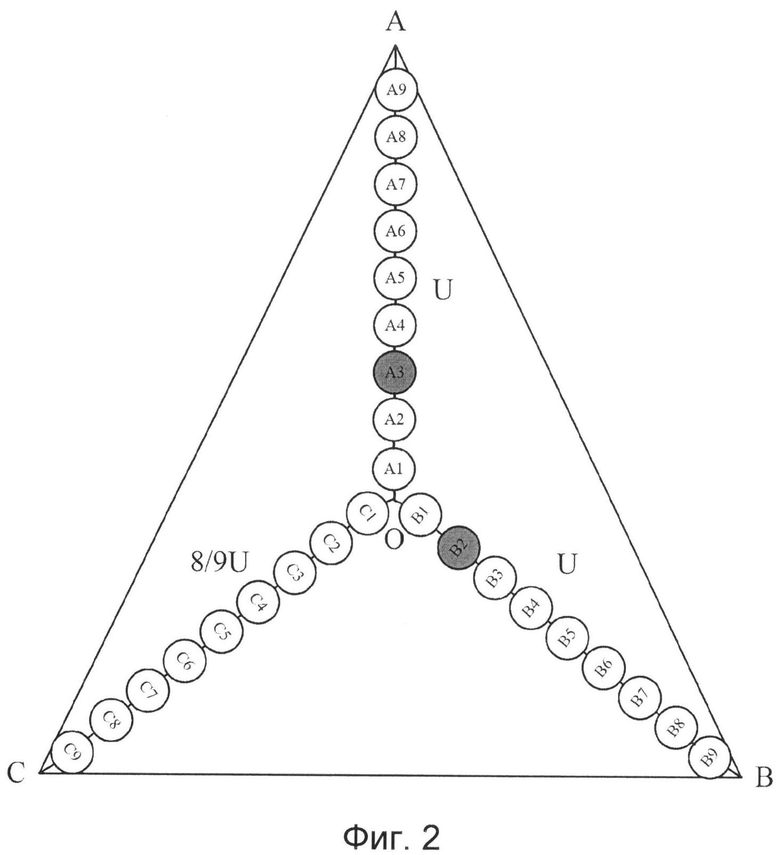
На фиг.2 показана упрощенная схема применения другого обычного способа управления в каскадном инверторе при шунтировании блоков питания.
В соответствии с фиг.2, полагая исходное фазное напряжение в фазах А, В и С равным U, каждый блок питания обеспечивает напряжения 1/9U. При возникновении отказов блока питания A3 в фазе А и блока питания В2 в фазе В блоки питания A3 и В2 шунтируют. При этом поскольку число блоков питания в нормальном рабочем состоянии в фазах А и В уменьшилось с 9 до 8, фазное напряжение фаз А и В стало меньше. Поэтому возникает асимметрия трехфазных линейных напряжений АВ, ВС и СА.
Для того чтобы решить эту проблему, уменьшают управляемое напряжение фазы С, пользуясь обычным способом управления без вывода из действия исправного блока питания. Так управляемое напряжение фазы С снижают до 8/9U. Однако этот способ управления также приводит к значительному снижению выходного напряжения и, кроме того, выходные мощности блоков питания существенно отличаются, и блоки питания имеют неодинаковую нагрузку. Кроме того, способ управления требует, чтобы каждая фаза была управляемой. Поэтому он несовместим с принципом широтно-импульсной модуляции пространственного вектора ШИМПВ (SVPWM).
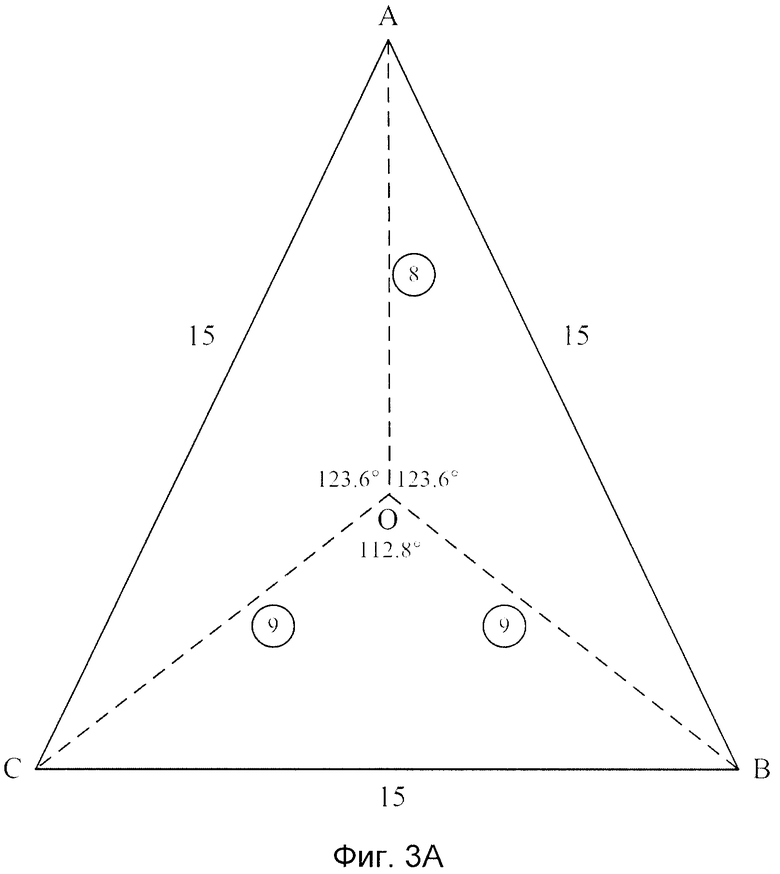
На фиг.3А и 3В показана упрощенная схема применения еще одного обычного способа управления каскадным инвертором при шунтировании различных блоков питания.
В соответствии с фиг.3А при отказе одного блока питания в фазе А (общее число блоков питания уменьшается с 9 до 8) выходные напряжения трех фаз поддерживаются симметричным, насколько возможно, путем изменения угла сдвига фаз (разности фаз) между каждыми двумя соседними фазами. Так, на фиг.3А разность фаз между фазами А и С составляет 123,6 град и между фазами А и В также 123,6 град. Однако для обеспечения симметрии линейных напряжений разность фаз между фазами В и С должна быть 112,8 град. Поэтому, хотя фазное напряжения фазы А отличается от фазных напряжений фаз В и С, трехфазные выходные линейные напряжения АВ, ВС и СА одинаковы (так, каждый из отрезков линий на фиг.3А имеет длину 15).
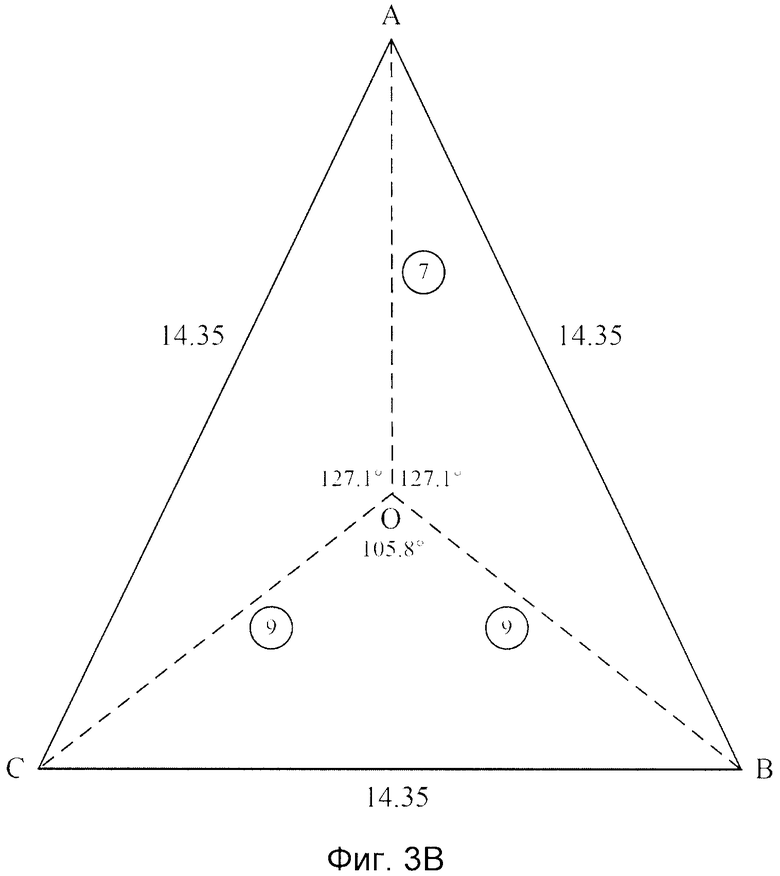
Как видно из фиг.3В, при отказе любых двух блоков питания в фазе А (общее число блоков питания уменьшается с 9 до 7) с помощью того же способа управления выходные напряжения трех фаз также поддерживаются симметричными, насколько возможно, путем изменения разности фаз между двумя соседними фазами. Так, на фиг.3В разность фаз между фазами А и С составляет 127,1 град и между фазами А и В также 127,1 град. Однако для симметрии линейных напряжений разность фаз между фазами В и С должна быть 105,8 град. Поэтому, хотя фазное напряжения фазы А отличается от фазных напряжений фаз В и С, трехфазные выходные линейные напряжения АВ, ВС и СА одинаковы (каждый из отрезков линий на фиг.3В имеет длину 14,35).
Однако как для фиг.3А, так и для фиг.3В способ управления требует учета всех возможных сочетаний шунтируемых блоков питания для каждой из фаз, и необходимо заранее рассчитать угол между каждыми двумя фазами после шунтирования для каждого сочетания. Поскольку в каждой фазе возможно много вариантов отказов блоков питания, их комбинации дают большое число значений углов, определяющих конкретные разности фаз между фазой А и фазой В, между фазой В и фазой С и между фазой С и фазой А, и это требует большого объема памяти в контроллере. Кроме того, значение угла является обычно плавающим числом и требует больше места для хранения в памяти. С другой стороны, способ управления также требует, чтобы каждая фаза была управляемой и это несовместимо с принципом ШИМПВ (SVPWM). Поэтому его применение ограничено с точки зрения векторного управления преобразователя.
На фиг.4 показана блок-схема последовательности операций способа управления каскадного инвертора при шунтировании блоков питания в соответствии с вариантом реализации предлагаемого изобретения. Как показано на фиг.4, первый шаг S11 способа управления согласно предлагаемому изобретению предусматривает измерение трехфазного выходного напряжения каскадного инвертора. Далее на шаге 813 вычисляют составляющую обратной последовательности измеряемого трехфазного выходного напряжения. Следует отметить, что составляющие прямой и обратной последовательностей напряжения (или тока) (в трехфазной четырехпроводной схеме, кроме того, возможна составляющая нулевой последовательности) используются для разложения асимметричного трехфазного напряжения (тока) при анализе схемы. В идеальном случае трехфазное напряжение симметрично (или относится к регулируемому для обеспечения симметрии), поэтому составляющая обратной последовательности напряжения равна нулю. При отказе в системе трехфазное напряжение становится асимметричным. При этом составляющая обратной последовательности имеет определенную амплитуду. Видно, что возможно разложение любого трехфазного напряжения (или тока) на составляющие прямой и обратной последовательности. Когда поддерживается симметричное трехфазное напряжение (или ток), трехфазное напряжение имеет только составляющую прямой последовательности, а составляющая обратной последовательности равна нулю. Если трехфазное напряжение (или ток) асимметричны, трехфазное напряжение содержит не только составляющую прямой последовательности, но также составляющую обратной последовательности, имеющую определенную амплитуду.
Далее на шаге S15 формируют заданную составляющую обратной последовательности для обеспечения автоматической компенсации составляющей обратной последовательности и затем вывода компенсированной составляющей обратной последовательности. Наконец, на шаге S17 компенсированную составляющую обратной последовательности складывают с заданием трехфазного выходного напряжения и выводят новое трехфазное выходное напряжение, модулированное в заданным режиме.
В соответствии с частным вариантом реализации заданная обратная последовательность в операции S15 равна нулю. Однако изобретение не ограничено этим. Например, в других вариантах реализации изобретения возможна также установка близкого к нулю граничного значения заданной обратной последовательности.
В соответствии с другим частным вариантом реализации изобретения автоматическую компенсацию составляющей обратной последовательности выполняют на указанном выше шаге S15 с помощью компенсатора. Компенсатор включает в себя, не ограничиваясь этим, пропорциональный компенсатор П (Р), пропорционально-интегральный компенсатор ПИ (PI), пропорционально-резонансный компенсатор ПР (PR) и пропорционально-интегрально-дифференциальный компенсатор ПИД (PID). Следует отметить, что компенсатор позволяет непосредственно компенсировать составляющую обратной последовательности, найденную на шаге S13. Возможна также автоматическая компенсация величины вычисленной составляющей обратной последовательности после преобразования координат. Например, трехфазную систему координат (в дальнейшем обозначаемую abc) заменяют двухфазной статической системой координат (в дальнейшем обозначаемой αβ). В качестве альтернативы систему координат abc заменяют двухфазной системой координат (в дальнейшем обозначаемой dq).
В соответствии с еще одним вариантом реализации изобретения заданный режим модуляции - это синусоидальная широтно-импульсная модуляция СШИМ (SPWM) или широтно-импульсная модуляция пространственного вектора ШИМПВ (SVPWM).
Прежде чем подробно рассматривать ряд приведенных далее вариантов реализации изобретения, обозначим трехфазное выходное напряжение в 25 системе координат abc Uout(abc), составляющую прямой последовательности трехфазного выходного напряжения - U(1)(abc), составляющую обратной последовательности трехфазного выходного напряжения - U(2)(abc), желаемое значение трехфазного выходного напряжения - Uout(abc), трехфазный выходной ток - Iout(abc), составляющую прямой последовательности трехфазного выходного тока - I(1)(abc), составляющую обратной последовательности трехфазного выходного тока - I(2)(abc), желаемое значение трехфазного выходного тока - Iout(abc) *. Аналогично трехфазное выходное напряжение в системе координат αβ обозначим Uout(αβ), составляющую прямой последовательности трехфазного выходного напряжения - U(1)(αβ), составляющую обратной последовательности трехфазного выходного напряжения - U(2)(αβ), желаемое значение трехфазного выходного напряжения - Uout(αβ) *, трехфазный выходной ток - Iout(αβ), составляющую прямой последовательности трехфазного выходного тока - I(1)(αβ), составляющую обратной последовательности трехфазного выходного тока - I(1)(αβ), желаемое значение трехфазного выходного тока - Iout(αβ) *. Трехфазное выходное напряжение в системе координат dq обозначим Uout(dq), составляющую прямой последовательности трехфазного выходного напряжения - U(1)(dq), составляющую обратной последовательности трехфазного выходного напряжения - U(2)(dq), желаемое значение трехфазного выходного напряжения - Uout(dq) *, трехфазный выходной ток - Iout(dq), составляющую прямой последовательности трехфазного выходного тока - I(1)(dq), составляющую обратной последовательности трехфазного выходного тока - I(2)(dq), желаемое значение трехфазного выходного тока - Iout(dq) *.
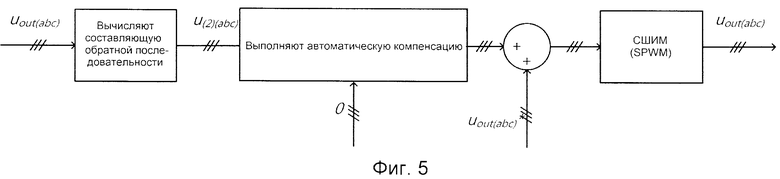
На фиг.5 показан характерный вариант реализации управления выходным напряжением на основе способа управления, показанного на фиг.4.
В соответствии с фиг.5 способ управления предусматривает вывод управляемого трехфазного выходного напряжения Uout(abc), модулированного в режиме СШИМ (SPWM). В этом варианте реализации изобретения измеряют трехфазное выходное напряжение Uout(abc). Далее вычисляют и выделяют составляющую U(2)(abc) обратной последовательности. После этого выполняют автоматическую компенсацию составляющей U(2)(abc) обратной последовательности (например, устанавливая заданное значение составляющей обратной последовательности, равное 0). Компенсированную составляющую обратной последовательности складывают с желаемым значением Uout(abc) * трехфазного выходного напряжения. В конечном счете трехфазное выходное напряжение Uout(abc) модулируют в режиме СШИМ (SPWM).
Специалистам в данной области техники понятно, что схема, представленная на фиг.5, служит иллюстрацией не только способа управления трехфазным выходным напряжением при шунтировании блока питания в каскадном инверторе, но также показывает устройство управления, выполненное в соответствии с этим способом. Точнее говоря, устройство управления содержит измерительный, вычислительный, компенсационный и выходной модули. Измерительный модуль измеряет трехфазное выходное напряжение Uout(abc). Вычислительный модуль вычисляет составляющую U(2)(abc) обратной последовательности трехфазного выходного напряжения, получаемую из измерительного модуля. Компенсационный модуль используют для получения заданной относительно 0 составляющей обратной последовательности и автоматической компенсации составляющей U(2)(abc) обратной последовательности, полученной из вычислительного модуля, в соответствии с заданной величиной для вывода компенсированной составляющей обратной последовательности. Выходной модуль обеспечивает сложение компенсированной составляющей обратной последовательности с трехфазным выходным напряжением и вывод нового трехфазного выходного напряжения Uout(abc), модулированного в режиме СШИМ (SPWM).
На фиг.6 показан другой частный вариант реализации управления выходным напряжением с использованием способа управления, показанного на фиг.4.
В соответствии с фиг.6 способ управления обеспечивает вывод управляемого трехфазного выходного напряжения Uout(abc), модулированного в режиме ШИМПВ (SVPWM). В этом варианте реализации изобретения измеряют текущее трехфазное выходное напряжение Uout(abc) и затем вычисляют и выделяют составляющую U(2)(abc) обратной последовательности. В отличие от фиг.5 способ управления, показанный на фиг.6, обеспечивает преобразование координат 3/2 (т.е. преобразование системы координат abc в систему координат αβ) вычисленной составляющей U(2)(abc) обратной последовательности для получения составляющей U(2)(αβ) обратной последовательности в двухфазной статической системе координат. После этого выполняют автоматическую компенсацию составляющей U(2)(αβ) обратной последовательности (например, устанавливая заданное относительно 0 значение составляющей обратной последовательности). Компенсированную составляющую обратной последовательности складывают с желаемым значением Uout(αβ) * трехфазного выходного напряжения. Затем трехфазное выходное напряжение Uout(abc) модулируют в режиме ШИМПВ (SVPWM). Здесь в модулятор ШИМПВ (SVPWM) должна быть введена составляющая в системе координат αβ. Поэтому перед автоматической компенсацией составляющей обратной последовательности U(2)(abc) необходимо преобразовать ее в составляющую U(2)(αβ) в системе координат αβ.
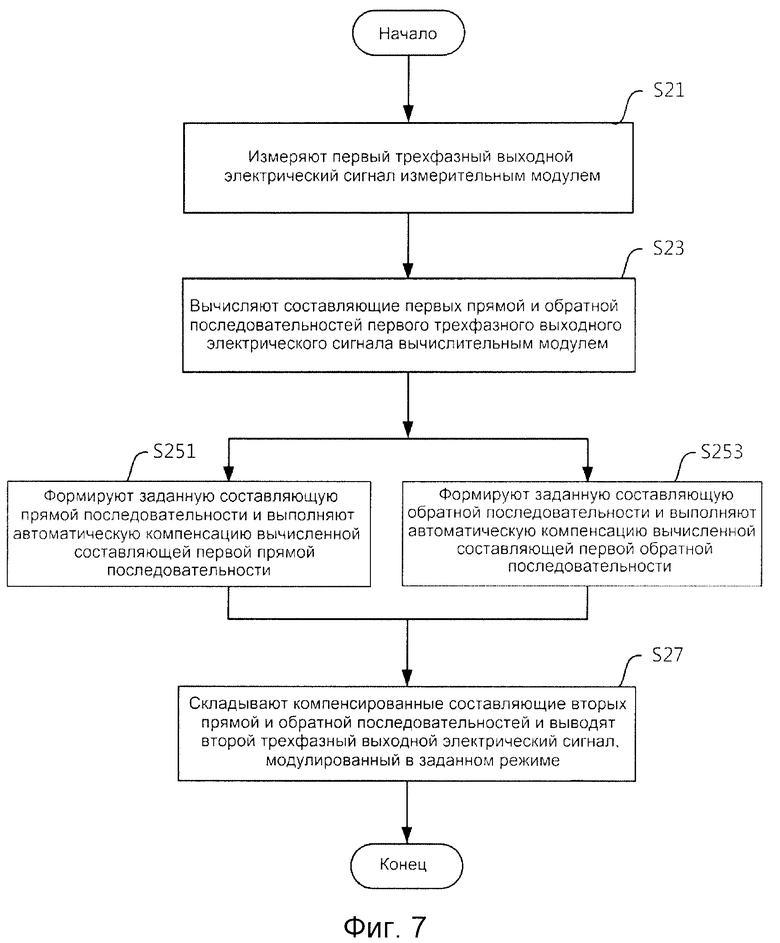
На фиг.7 показана блок-схема последовательности операций способа управления каскадным инвертором при шунтировании блоков питания в соответствии с другим вариантом реализации предлагаемого изобретения.
В соответствии с фиг.7 в этом варианте реализации изобретения вначале на шаге S21 выполняют измерение первого трехфазного выходного электрического сигнала каскадного инвертора. Здесь электрический сигнал необязательно должен быть сигналом напряжения. Далее на шаге S23 вычисляют составляющие первых прямой и обратной последовательностей первого трехфазного выходного электрического сигнала. После этого на шагах S251 и S253 формируют заданную составляющую прямой последовательности и выполняют автоматическую компенсацию вычисленной составляющей первой прямой последовательности, а затем формируют заданную составляющую обратной последовательности и выполняют автоматическую компенсацию вычисленной составляющей первой обратной последовательности для вывода составляющих вторых прямой и обратной последовательностей. Наконец, на шаге S27 складывают компенсированные составляющие вторых прямой и обратной последовательностей и выводят второй трехфазный выходной электрический сигнал, модулированный в заданном режиме.
Следует отметить, что шаги S251 и S253 не являются строго упорядоченными. Сначала возможна автоматическая компенсация составляющей первой прямой последовательности, а затем составляющей первой обратной последовательности. С другой стороны, возможна автоматическая компенсация сначала составляющей первой обратной последовательности, а затем первой прямой последовательности. Кроме того, возможна одновременная автоматическая компенсация этих составляющих.
В соответствии с еще одним частным вариантом реализации изобретения заданный режим модуляции - это синусоидальная широтно-импульсная модуляция СШИМ (SPWM) или широтно-импульсная модуляция пространственного вектора ШИМПВ (SVPWM). Кроме того, если выбрана модуляция СШИМ (SPWM), заданная составляющая прямой последовательности представляет собой желаемое значение первого трехфазного выходного электрического сигнала в трехфазной системе координат.
В соответствии с частным вариантом реализации изобретения заданная составляющая обратной последовательности равна 0.
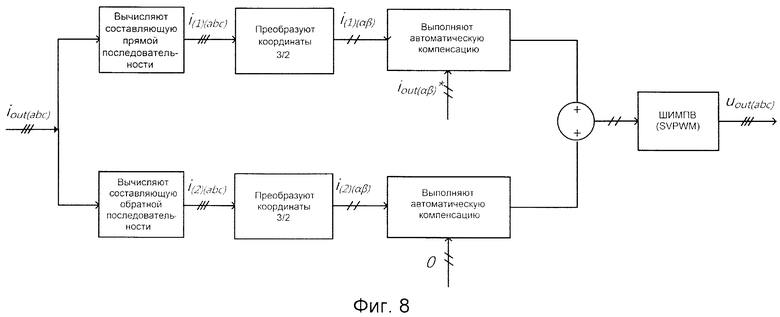
На фиг.8 показан характерный вариант реализации управления выходным напряжением с использованием способа управления, показанного на фиг.7.
В соответствии с фиг.8 способ управления обеспечивает вывод управляемого трехфазного выходного напряжения Uout(abc) в режиме модуляции ШИМПВ (SVPWM). В этом варианте реализации изобретения в качестве измеряемой величины выступает трехфазный выходной ток Iout(abc). Однако изобретение не ограничено этим. Например, в качестве измеряемой величины возможно также трехфазное выходное напряжение Uout(abc).
Здесь специально измеряют трехфазный выходной ток Iout(abc) каскадного инвертора и соответственно вычисляют составляющие I(1)(abc) и I(2)(abc) первых прямой и обратной последовательностей трехфазного выходного тока. Далее выполняют преобразование 3/2 составляющей I(1)(abc) прямой последовательности в системе координат abc в составляющую I(1)(αβ) первой прямой последовательности в системе координат αβ. После формирования заданной составляющей Iout(αβ) * прямой последовательности выполняют автоматическую компенсацию I(1)(αβ). Одновременно выполняют преобразование 3/2 составляющей I(2)(abc) обратной последовательности в системе координат abc в составляющую I(2)(αβ) первой обратной последовательности в системе координат αβ. После формирования заданной составляющей обратной последовательности, равной нулю, выполняют автоматическую компенсацию составляющей I(2)(αβ). Наконец, складывают компенсированные составляющие вторых прямой и обратной последовательностей и выводят второй трехфазный выходной электрический сигнал, модулированный в режиме ШИМПВ (SVPWM).
В некоторых других вариантах реализации изобретения возможен вывод управляемого трехфазного выходного напряжения, модулированного в режиме СШИМ (SPWM). Например, выполняют автоматическую прямую компенсацию вычисленных составляющих I(1)(abc) и I(2)(abc) первых прямой и обратной последовательностей. После этого суммируют компенсированные составляющие вторых прямой и обратной последовательностей и трехфазное выходное напряжение модулируют в режиме СШИМ (SPWM). Так, преобразование 3/2, показанное на фиг.8, сохранено, и только после сложения вторых составляющих прямой и обратной последовательностей после их автоматической компенсации выполняют преобразование 2/3 (т.е. преобразование из системы координат αβ в систему координат abc). Затем трехфазное выходное напряжение модулируют в режиме СШИМ (SPWM).
В соответствии с другим частным вариантом реализации изобретения способ управления дополнительно включает в себя преобразование координат abc/dg, выполняемое соответственно для составляющих первых прямой и обратной последовательностей для получения соответствующих составляющих в двухфазной вращающейся системе координат для их автоматической компенсации.
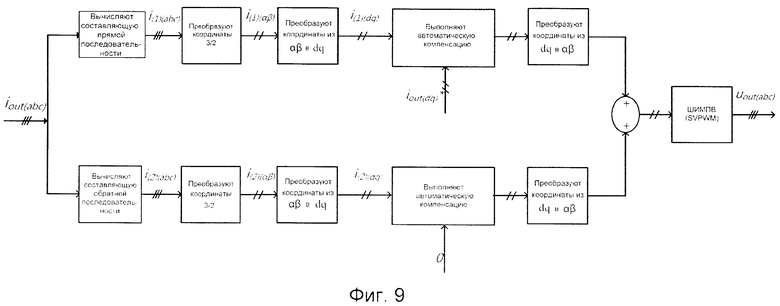
На фиг.9 показан другой частный вариант реализации управления выходным напряжением с использованием способа управления, показанного на фиг.7.
Как и на фиг.8, способ управления, показанный на фиг.9, обеспечивает вывод управляемого трехфазного выходного напряжения Uout(abc), модулированного в режиме ШИМПВ (SVPWM). В этом варианте реализации изобретения в качестве измеряемой величины выступает трехфазный выходной ток Iout(abc). Однако это не ограничивает изобретение. Например, возможно также измерение трехфазного выходного напряжения Uout(abc).
Фиг.9 и 8 отличаются тем, что на фиг.9 после преобразования 3/2 составляющих I(1)(abc) и I(2)(abc) соответственно прямой и обратной последовательностей выполняют дополнительное преобразование координат αβ/dq составляющих I(1)(αβ) и I(2)(αβ) двухфазной статической системы координат для получения вращающихся величин I(1)(dq) и I(2)(dq). Затем после формирования заданной составляющей прямой последовательности выполняют автоматическую компенсацию вращающейся величины I(1)(αβ) вычисленной составляющей первой прямой последовательности. После формирования заданной относительно 0 составляющей обратной последовательности выполняют автоматическую компенсацию вращающейся величины I(2)(dq) вычисленной составляющей первой обратной последовательности. Поскольку непосредственное сложение составляющих прямой и обратной последовательностей в двухфазной вращающейся системе координат (система координат dq) на компенсированных выходах вычислительных модулей невозможно, необходимо выполнить преобразование координат dq/αβ для получения составляющих в системе координат αβ, и эти составляющие в конечном счете суммируют и выводят с модуляцией в режиме ШИМПВ (SVPWM).
В некоторых вариантах реализации изобретения возможно объединение преобразования 3/2 и преобразования αβ/dq путем использования прямого преобразования abc/dq. Поэтому возможно также получение вращающейся величины I(1)(dq) составляющей первой прямой последовательности и вращающейся величины I(2)(dq) составляющей первой обратной последовательности в двухфазной вращающейся системе координат.
В некоторых вариантах реализации изобретения возможно также использование модуляции в режиме СШИМ (SPWM) для вывода управляемого трехфазного выходного напряжения. Например, преобразование координат dq/abc выполняют соответственно для вторых составляющих прямой и обратной последовательностей после их автоматической компенсации для получения составляющих в трехфазной системе координат и вывода второго трехфазного выходного напряжения после выполнения сложения.
При использовании устройства и способа управления в соответствии с предлагаемым изобретением при шунтировании блоков питания, обеспечивающих автоматическую компенсацию составляющей обратной последовательности трехфазного выходного напряжения, каскадный инвертор по-прежнему позволяет поддерживать симметрию выходного напряжений. Кроме того, в предлагаемом изобретении возможна автоматическая компенсация соответственно составляющих прямой и обратной последовательностей трехфазного выходного электрического сигнала (например, напряжения или тока) и компенсированную составляющую прямой последовательности далее складывают с компенсированной составляющей обратной последовательности, чтобы обеспечить симметрирование трехфазного выходного электрического сигнала каскадного инвертора. По сравнению с известным уровнем техники варианты реализации предлагаемого изобретения позволяют не только эффективно использовать все исправные блоки питания, но также обеспечивают работу с небольшим уменьшением выходного напряжения и даже при практически неизменном выходном напряжении. Кроме того, способ управления применим не только для модуляции в режиме СШИМ (SPWM), но также в режиме ШИМПВ (SVPWM). Поэтому он хорошо совместим с векторным управлением преобразователем.
Как указывалось выше, характерные варианты реализации описаны со ссылками на прилагаемые чертежи. Однако любому специалисту в данной области техники должно быть понятно, что в этих вариантах возможны различные модификации и изменения в пределах сущности и объема предлагаемого изобретения. Эти модификации и изменения должны подпадать под действие формулы предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации емкостных токов короткого замыкания в сетях с изолированной нейтралью 6-10 кВ | 2015 |
|
RU2626011C2 |
| СПОСОБ И СИСТЕМА ПАРАЛЛЕЛЬНОГО УПРАВЛЕНИЯ ДЛЯ ОДНОФАЗНЫХ ИНВЕРТОРОВ И ИНВЕРТОР | 2019 |
|
RU2756177C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2008 |
|
RU2394346C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ЦИРКУЛИРУЮЩИМ ТОКОМ В СИСТЕМЕ ИНВЕРТОРОВ | 2014 |
|
RU2620582C2 |
| Устройство управления высоковольтным преобразователем частоты с активным выпрямителем | 2022 |
|
RU2793193C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ ВОЛЬТОДОБАВОЧНЫМ ТРАНСФОРМАТОРОМ | 2015 |
|
RU2599732C1 |
| Способ прямого бездатчикового управления угловым положением ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2749454C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ ПРИ ЕЕ НЕСИММЕТРИИ | 2011 |
|
RU2460194C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ, СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2010 |
|
RU2452076C2 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |

Изобретение относится к области электротехники и может быть использовано в устройстве и способе управления, используемых при шунтировании блоков питания. Технический результат - уменьшение пульсации выходного напряжения. Способ управления при шунтировании блока питания включает в себя: измерение первого трехфазного выходного электрического сигнала; вычисление соответственно составляющих первых прямой и обратной последовательностей первого трехфазного выходного электрического сигнала; формирование заданных составляющих прямой и обратной последовательностей фаз, чтобы соответственно выполнить автоматическую компенсацию составляющих первых прямой и обратной последовательностей, таким образом, выводя составляющие вторых прямой и обратной последовательностей; сложение вторых составляющих прямой и обратной последовательностей и вывод второго трехфазного выходного электрического сигнала в заданном режиме. 2 н. и 8 з.п. ф-лы, 10 ил.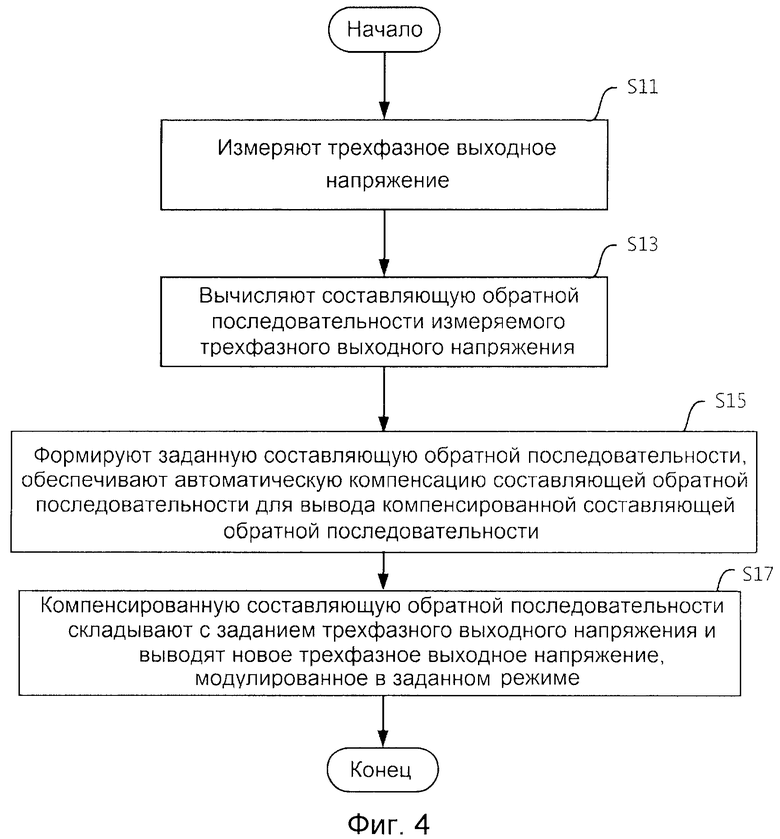
1. Устройство управления, используемое при шунтировании блоков питания для симметрирования трехфазного выходного напряжения каскадного инвертора, содержащее
измерительный модуль для измерения трехфазного выходного напряжения;
вычислительный модуль для вычисления составляющей обратной последовательности, содержащейся в трехфазном выходном напряжении;
компенсационный модуль для получения заданной составляющей обратной последовательности и выполнения автоматической компенсации на основе составляющей обратной последовательности, формируемой вычислительным модулем в соответствии с заданной составляющей обратной последовательности для вывода компенсированной составляющей обратной последовательности, и
выходной модуль для сложения компенсированной составляющей обратной последовательности с заданием трехфазного выходного напряжения и вывода нового трехфазного выходного напряжения с использованием режима модуляции, причем режим модуляции - это режим синусоидальной широтно-импульсной модуляции СШИМ (SPWM) или режим широтно-импульсной модуляции пространственного вектора ШИМПВ (SVPWM).
2. Устройство управления по п.1, в котором при использовании режима ШИМПВ (SVPWM) вычислительный модуль дополнительно предназначен для преобразования координат abc/αβ вычисленной составляющей обратной последовательности для получения составляющей обратной последовательности в двухфазной статической системе координат и модуль компенсации обеспечивает автоматическую компенсацию составляющей обратной последовательности в двухфазной статической системе координат в соответствии с заданной составляющей обратной последовательности для вывода компенсированной составляющей обратной последовательности.
3. Способ управления, используемый при шунтировании блоков питания для симметрирования трехфазного выходного напряжения каскадного инвертора, включающий в себя:
измерение первого трехфазного выходного электрического сигнала с помощью измерительного модуля;
вычисление соответственно составляющих первых прямой и обратной последовательностей первого трехфазного выходного электрического сигнала с помощью вычислительного модуля;
формирование заданных составляющих прямой и обратной последовательностей фаз с помощью компенсационного модуля и выполнение автоматической компенсации составляющих первых прямой и обратной последовательностей для вывода составляющих вторых прямой и обратной последовательностей; и
сложение вторых составляющих прямой и обратной последовательностей и вывод второго трехфазного выходного электрического сигнала в режиме модуляции, в котором
режим модуляции - это режим синусоидальной широтно-импульсной модуляции СШИМ (SPWM) или режим широтно-импульсной модуляции пространственного вектора ШИМПВ (SVPWM).
4. Способ управления по п.3, в котором при использовании режима СШИМ (SPWM) заданная составляющая прямой последовательности представляет собой желаемое значение первого трехфазного выходного электрического сигнала в трехфазной системе координат.
5. Способ управления по п.3, в котором при использовании режима ШИМПВ (SVPWM) способ управления дополнительно включает в себя:
соответственно преобразование координат abc/αβ вычисленных составляющих первых прямой и обратной последовательностей для получения соответствующих статических величин составляющих первой прямой и обратной последовательностей в двухфазной статической системе координат для выполнения автоматической компенсации.
6. Способ управления по п.5, в котором заданная составляющая прямой последовательности является желаемым значением первого трехфазного выходного электрического сигнала в двухфазной статической системе координат.
7. Способ управления по п.3, дополнительно включающий в себя:
соответственно преобразование координат abc/dq вычисленных составляющих первых прямой и обратной последовательностей для получения соответствующих вращающихся величин составляющих первых прямой и обратной последовательностей в двухфазной вращающейся системе координат для выполнения автоматической компенсации.
8. Способ управления по п.3, в котором при использовании режима СШИМ (SPWM) операция сложения дополнительно включает в себя:
соответственно преобразование координат dq/abc компенсированных вторых составляющих прямой и обратной последовательностей для получения величин составляющих вторых прямой и обратной последовательностей в трехфазной системе координат и далее вывод второго трехфазного выходного электрического сигнала после сложения.
9. Способ управления по п.3, в котором при использовании режима ШИМПВ (SVPWM) операция сложения дополнительно включает в себя:
соответственно преобразование координат dq/αβ компенсированных составляющих вторых прямой и обратной последовательностей для получения статических величин составляющих вторых прямой и обратной последовательностей в двухфазной статической системе координат и далее вывод второго трехфазного выходного электрического сигнала после сложения.
10. Способ управления по п.3, в котором заданная составляющая обратной последовательности равна нулю.
| УСТРОЙСТВО ДЛЯ СИММЕТРИРОВАНИЯ И ПОВЫШЕНИЯ КОЭФФИЦИЕНТА МОЩНОСТИ ЭЛЕКТРОТЯГОВОЙ НАГРУЗКИ | 2009 |
|
RU2396663C1 |
| Ламповый генератор | 1939 |
|
SU57527A1 |
| Устройство для симметрирования токов трехфазных сетей | 1988 |
|
SU1686600A1 |
| US 201000072930 A1, 25.03.2010 | |||
| US 6831442 B2, 14.12.2002 | |||
| US 6052297 A1, 18.04.2000 | |||
| EP 1998432 A2, 18.04.2000 | |||

