Уровень техники изобретения
Изобретение относится к области моделирования геологических процессов для изучения подпочвенного грунта. Интерес, в частности, сосредотачивается на процессах карстообразования в карстовой области.
Подходы, описанные в этом разделе, могут быть рассмотрены, но не обязательно, что ранее об этих подходах имелось представление или они рассматривались. Поэтому, если здесь не указано иное, подходы, описанные в этом разделе, не являются предшествующим уровнем формулы изобретения, содержащейся в этой заявке, и их введение в этот раздел не означает их принятие в качестве предшествующего уровня техники. Дополнительно, все варианты осуществления не обязательно предназначены решать все или даже любые из проблем, представленных в этом разделе.
Карстообразование горной породы представляет собой явление, посредством которого структура породы изменяется из-за растворения карбонатов в воде. Вода просачивается через пустоты породы, например, поры или разломы, и такое просачивание увеличивает размер этих пустот за счет растворения карбонатов горной породы в просачивающейся воде. Таким образом могут образовываться каналы и полости.
Вода обычно может быть дождевой водой, становящейся кислой под действием двуокиси углерода из атмосферы или грунта. Помимо прочего, вода может появляться, например, за счет гидротермальных лифтов.
Порода может содержать, например, известняк.
В карбонатных резервуарах часто наблюдаются процессы карстообразования. Эти процессы оказывают отчетливое влияние на рабочие характеристики и прогнозы потока в резервуаре: некоторые отдаленные каналы могут соединяться чрезвычайно быстро, тогда как другие близкие каналы не могут эффективно соединяться. Поэтому, чтобы получить точное представление о потенциальных возможностях резервуара, важно одновременно решить две различных задачи:
- соответствующее представление сети карстовых каналов, которая управляет связностью резервуара;
- формализация структуры, чтобы разрешить проблему неопределенностей для глобальных связанных объемов и соответствующего местоположения локальных неоднородностей.
Известная практика заключается в статическом моделировании карстовой области,используя наблюдения, в частности, геологические и сейсмические наблюдения. При бурении скважин, данные, измеренные с помощью скважин, называемые данными о скважине, могут использоваться для проведения апостериорных корректировок модели карстовой области.
Статья О. Jaquet et al., "Stochastic discrete model of karstic networks", Advances in Water Resources 27 (2004), 751-760 описывает способ моделирования процессов карстообразования, основанный на стохастическом подходе. В этой работе карстовая область моделируется как сеть трубопроводов с проницаемостями и пористостями, зависящими от частиц, проходящих по этим трубам. Эти частицы соответствуют каплям воды, поступающим в карстовую систему, и их перемещение по сети подчиняется законам типа "случайного блуждания". Этот способ можно назвать псевдогенетическим подходом.
Существует потребность в повышении эффективности определения, чтобы обеспечить быстрые и эффективные геометрические технологии распределения зон каналов в соответствии с областями просачивания через палеоводоносные слои и областями выпуска, при наличии разумных рабочих характеристик центрального процессора (CPU).
Раскрытие изобретения
Изобретение относится к способу определения карстовой области, видоизмененной процессами карстообразования. Способ содержит этапы, на которых:
a) принимают геологическую модель карстовой области, содержащую ячейки, причем упомянутая модель содержит по меньшей мере одну исходную зону, содержащую ячейки модели, и по меньшей мере одну целевую зону, содержащую ячейки модели, и каждая из ячеек модели имеет координаты;
b) определяют исходную ячейку из числа ячеек по меньшей мере одной исходной зоны;
c) определяют целевую ячейку из указанных ячеек по меньшей мере одной целевой зоны;
d) если расстояние между исходной ячейкой и целевой ячейкой превышает заданное расстояние:
d1) определяют зону бифуркации, основываясь, по меньшей мере, на координатах исходной ячейки, координатах целевой ячейки, распределении расстояний, угловом распределении,
d2) определяют ячейку бифуркации в упомянутой зоне бифуркации;
d3) повторяют этап d) для ячейки, исходя из того, что упомянутую ячейкубифуркации определяют в качестве на исходной ячейки;
e) определяют траекторные ячейки в геологической модели, основываясь на исходной ячейке, целевой ячейке и ячейках бифуркации, определенных на этапе d);
f) для каждой текущей ячейки в траекторных ячейках;
f1) определяют характеристики каналов, исходя из заданного распределения плотности каналов, заданного распределения прохода каналов и траекторных ячейках, соединенных с упомянутой текущей ячейкой;
f2) определяют характеристики ячеек, исходя из характеристик каналов упомянутой текущей ячейки.
Геологическая модель может являться, например, сеточным представлением реальной почвы. В трех измерениях геологическая модель может быть представлена матрицей, причем каждая ячейка матрицы имеет три индекса (i, j, k). Каждая ячейка матрицы содержит информацию, касающуюся геологических и/или геофизических характеристик в ячейке, таких как пористость, проницаемость во всех пространственных направлениях и т.д.
Характеристики ячейки могут содержать, например, единый набор значений проницаемости и пористости. Эти значения могут соответствовать эквивалентным пористости φequ и проницаемости Kequ матрицы (то есть, содержанию ячейки) с каналами внутри этой матрицы.
Характеристики ячеек могут также содержать множество наборов значений проницаемости и пористости. Например, один набор из этого множества может содержать значения пористости φm и проницаемости Km для матрицы без каких-либо каналов, а другой набор из этого множества может содержать значения пористости φk и проницаемости Kk для каналов только внутри матрицы. Также возможно определить "коэффициент обмена" между этими двумя компонентами. Коэффициент обмена σ может быть выбран оператором. В одном возможном варианте осуществления коэффициент обмена σ может быть равен  где
где 
плотность каналов в ячейках на м2 и - среднее значение радиуса каналов в ячейках
- среднее значение радиуса каналов в ячейках  если радиус всех каналов одинаков и равен ri).
если радиус всех каналов одинаков и равен ri).
С помощью описанного выше способа моделирование карстообразования может быть легко определено, используя геометрический процесс. Этот процесс прост для повторения и, таким образом, нуждается только в разумных рабочих характеристикахцентрального процессора.
Угловое распределение может ограничиваться одним единственным углом (например, вероятность угла 0° равна 1, тогда как вероятность других углов равна 0).
Угловое распределение может быть ограничено однородным конусом (например, вероятность углов в конусе [-α; +α] одинаковая, тогда как вероятность углов вне конуса равна 0).
Распределение расстояний может быть ограничено единственным расстоянием (например, вероятность для расстояния d1 равна 1, тогда как вероятность других расстояний равна 0).
Распределение расстояний может ограничиваться единственным интервалом (например, вероятность расстояний в интервале [d1; d2] одинаковая, тогда как вероятность расстояний вне интервала равна 0).
В одном из вариантов осуществления этапы b)-f) могут повторяться множество раз с одними и теми же исходной зоной и целевой зоной.
В результате можно определить множество "карстовых траекторий" и, благодаря стохастическому подходу, создать широкую зону в модели, где явление карстообразования приводит к размыванию подпочвенного слоя.
Кроме того, для упомянутой модели, содержащей множество исходных зон и множество целевых зон, этапы b)-f) могут повторяться множество раз с различными комбинациями исходной зоны из множества исходных зон и целевой зоны из множества целевых зон.
Таким образом, можно учесть тот факт, что существует множество зон выпуска или просачивания. Кроме того, исходная зона при первом определении может быть целевой зоной при втором определении.
В соответствии с другим вариантом осуществления, исходная ячейка может быть определена на этапе b) в соответствии со стохастическим процессом и в соответствии с заданным распределением в указанной по меньшей мере одной исходной зоне.
Распределение может быть однородным в указанной по меньшей мере одной исходной зоне.
Кроме того, целевая ячейка может быть определена на этапе с) в соответствии со стохастическим процессом и в соответствии с заданным распределением в указанной по меньшей мере одной целевой зоне.
Это распределение также может быть однородным в указанной по меньшей мере одной целевой зоне.
В одном из вариантов ячейка, основанная на упомянутой ячейке бифуркации,может быть упомянутой ячейкой бифуркации.
В дальнейшем, повторение этапа d) является простым, поскольку при повторении ячейка бифуркации используется в качестве исходной ячейки.
Кроме того, ячейка на основе упомянутой ячейки бифуркации является ячейкой, соответствующей проекции ячейки бифуркации на линию, определенную исходной ячейкой и целевой ячейкой.
Проекция может быть, например, ортогональной проекцией. Проекция может также быть определением ячейки на линии, определяемой исходной ячейкой и целевой ячейкой, где расстояние между этой ячейкой и исходной ячейкой и расстояние между ячейкой бифуркации и целевой ячейкой является одним и тем же. Проекция может также быть определением ячейки на линии, определенной исходной ячейкой и целевой ячейкой, где расстояние между этой ячейкой и целевой ячейкой и расстояние между ячейкой бифуркации и целевой ячейкой является одним и тем же.
Определение траекторных ячеек может также выполняться этапами, на которых:
- выстраивают ячейки бифуркации по порядку в соответствии с порядком определения на этапе d) в списке ячеек;
- добавляют исходную ячейку в первое положение в упомянутом списке ячеек;
- добавляют целевую ячейку в последнее положение в упомянутом списке ячеек;
- определяют сегменты в модели между двумя следующими друг за другом ячейками в списке ячеек;
- определяют ячейки модели на основе алгоритма линии аппроксимации.
Такое "упорядочивание" позволяет определять, какие ячейки определены раньше других, например, благодаря индексу, связанному с упомянутыми ячейками.
После трех первых подэтапов список ячеек содержит множество ячеек, где первая ячейка является исходной ячейкой, а последняя ячейка является целевой ячейкой, и другие ячейки в списке выстраиваются по порядку в соответствии с порядком их определения.
Следовательно, алгоритм линии аппроксимации может быть одним из алгоритмов, входящих в группу, содержащую алгоритм Брезенхэма, алгоритм DDA и вычислительный алгоритм Run-Slice.
Далее, аппроксимация позволяет осуществлять дискретизацию траектории.
В одном из вариантов осуществления изобретения определение траекторных ячеек может выполняться следующим образом:
- упорядочивают ячейки бифуркации согласно порядку определения на этапе d) в списке ячеек;
- добавляют исходную ячейку в первое положение в упомянутом списке ячеек;
- добавляют целевую ячейку в последнее положение в упомянутом списке ячеек;
- определяют кривую интерполяции, аппроксимируя список ячеек в модели;
- определяют ячейки модели, основываясь на алгоритме кривой аппроксимации.
В другом варианте осуществления, определение характеристик каналов может содержать:
- ячейку, являющуюся двумерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере к одному краю текущей ячейки, если край упомянутой текущей ячейки, перпендикулярный к упомянутому направлению, используется совместно с траекторной ячейкой, связанной с упомянутой текущей ячейкой, определяя по меньшей мере один канал в упомянутой текущей ячейке в упомянутом направлении, и радиус rс упомянутого канала определяется в упомянутом заданном распределении апертуры канала, или
- ячейку, являющуюся трехмерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере к одной стороне текущей ячейки, если сторона упомянутой текущей ячейки, перпендикулярная упомянутому направлению, используется совместно с траекторной ячейкой, связанной с упомянутой текущей ячейкой, определяя по меньшей мере один канал в упомянутой текущей ячейке в упомянутом направлении, причем радиус rс упомянутого канала определяется в упомянутом заданном распределении апертуры канала.
Ячейка соединяется с другой ячейкой, если она совместно использует по меньшей мере один край (в двумерном случае) или одну сторону (в трехмерном случае). Когда модель является сеткой с трехмерными кубическими ячейками, большинство ячеек модели соединяются с шестью другими ячейками. Когда модель является сеткой с двумерными квадратными ячейками, большинство ячеек модели соединяются с четырьмя другими ячейками.
Таким образом, радиус каналов в данной ячейке в направлении траектории может быть легко определен.
Распределение апертуры каналов может быть равномерным распределением между максимальным и минимальным радиусом или, например, быть гауссовым распределением, центрированным на центральном радиусе.
Кроме того, определение характеристик каналов может содержать:
- ячейку, являющуюся двумерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере к одному краю текущей ячейки, если край упомянутой текущей ячейки, перпендикулярный к упомянутому направлению,используется совместно с траекторной ячейкой, связанной с упомянутой текущей ячейкой,
- определяя количество Nc каналов, которое должно определяться на основе упомянутого заданного распределения плотности каналов;
- определяя количество Nc каналов в упомянутой текущей ячейке в упомянутом направлении; или
- ячейку, являющуюся трехмерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере к одной стороне текущей ячейки, если сторона упомянутой текущей ячейки, перпендикулярная к упомянутому направлению, используется совместно с траекторной ячейкой, связанной с упомянутой текущей ячейкой,
- определяя количество Nc каналов, которое должно определяться на основе упомянутого заданного распределения плотности каналов;
- определяя количество Nc каналов в упомянутой текущей ячейке в упомянутом направлении.
Таким образом, количество каналов в направлении траектории в заданной ячейке может быть легко определено.
Распределение плотности каналов может быть равномерным распределением между максимальной и минимальной плотностями или быть, например, кривой гауссова распределения, центрированной на центральной плотности, или любым определяемым пользователем распределением.
Когда плотность известна (основываясь на случайном выборе в распределении плотности), можно определить количество каналов, поскольку секция (сторона или край), перпендикулярная к упомянутому направлению, может быть легко определена.
Определение характеристик ячейки может также содержать:
- получение характеристики начальной пористости φm текущей ячейки;
- установку эквивалентной пористости от φeq до φm;
- по меньшей мере для одного текущего канала в текущей ячейке в упомянутом направлении,
- вычисляют пористость φtemp текущей ячейки, основываясь на  где
где
Sc - сечение текущего канала и S - сечение упомянутого края или стороны упомянутой текущей ячейки, перпендикулярных к упомянутому направлению и совместно используемых с траекторной ячейкой;
- устанавливают эквивалентную пористость φeq равной φtemp.
Например, φtemp может быть равна  или
или  где
где
φdiff добавляется, если вокруг канала создается диффузная пористость. Сечение текущего канала является участком или поверхностью (например,  если канал является трехмерным круглым каналом, и rс, если канал является двумерным прямоугольником). Сечение края или стороны упомянутой текущей ячейки является отрезком или поверхностью.
если канал является трехмерным круглым каналом, и rс, если канал является двумерным прямоугольником). Сечение края или стороны упомянутой текущей ячейки является отрезком или поверхностью.
В одном из вариантов осуществления определение характеристик ячейки может дополнительно содержать:
- получение характеристики Km начальной проницаемости текущей ячейки;
- установку эквивалентной проницаемости Keq равной Km;
- по меньшей мере для одного текущего канала в текущей ячейке в упомянутом направлении;
- вычисление проницаемости Ktemp текущей ячейки, основываясь на  где Sc - сечение текущего канала, S является сечением упомянутого края или стороны упомянутой текущей ячейки, перпендикулярной упомянутому направлению и используемой совместно с траекторной ячейкой, и где Kc - проницаемость текущего канала трубы;
где Sc - сечение текущего канала, S является сечением упомянутого края или стороны упомянутой текущей ячейки, перпендикулярной упомянутому направлению и используемой совместно с траекторной ячейкой, и где Kc - проницаемость текущего канала трубы;
- установку эквивалентной проницаемости Keq равной Ktemp.
Kc может быть определен согласно закону Пуазейля для потока в каналах.
Проницаемость текущего канала может быть вычислена, например, основываясь на  где S, Nc и rc определены выше.
где S, Nc и rc определены выше.
Второй вариант относится к компьютерному программному продукту, содержащему считываемый компьютером носитель, на котором имеется программа, содержащая программные команды. Компьютерная программа может быть загружена в блок обработки данных и выполнена с возможностью приказания блоку обработки данных выполнять способ, описанный выше, когда компьютерная программа работает под управлением блока обработки данных.
Другие признаки и преимущества раскрытых здесь способа и устройства станут очевидны из последующего описания вариантов осуществления, не создающихограничений, со ссылкой на приложенные чертежи.
Краткое описание чертежей
Настоящее изобретение представлено в виде примера, не предназначенного для создания ограничений, используя сопроводительные чертежи, на которых ссылочные позиции относятся к схожим элементам и на которых:
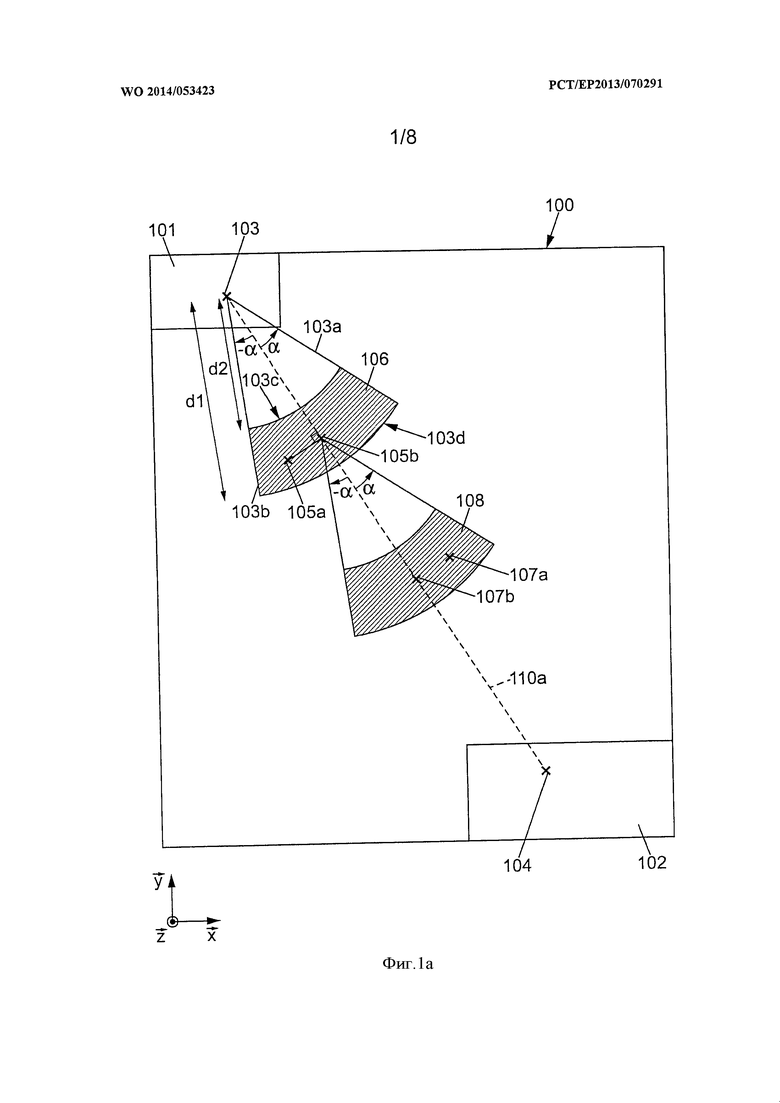
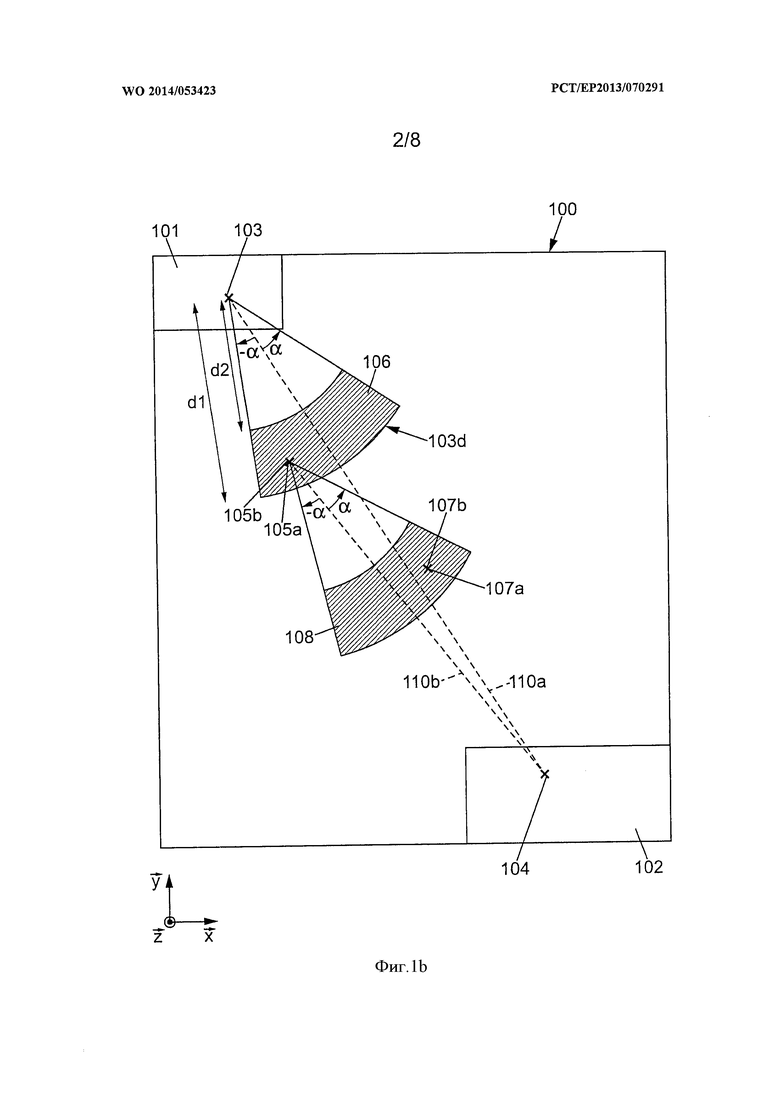
фиг. 1а и lb - возможные варианты осуществления для определения ячеек бифуркации в полученной модели;
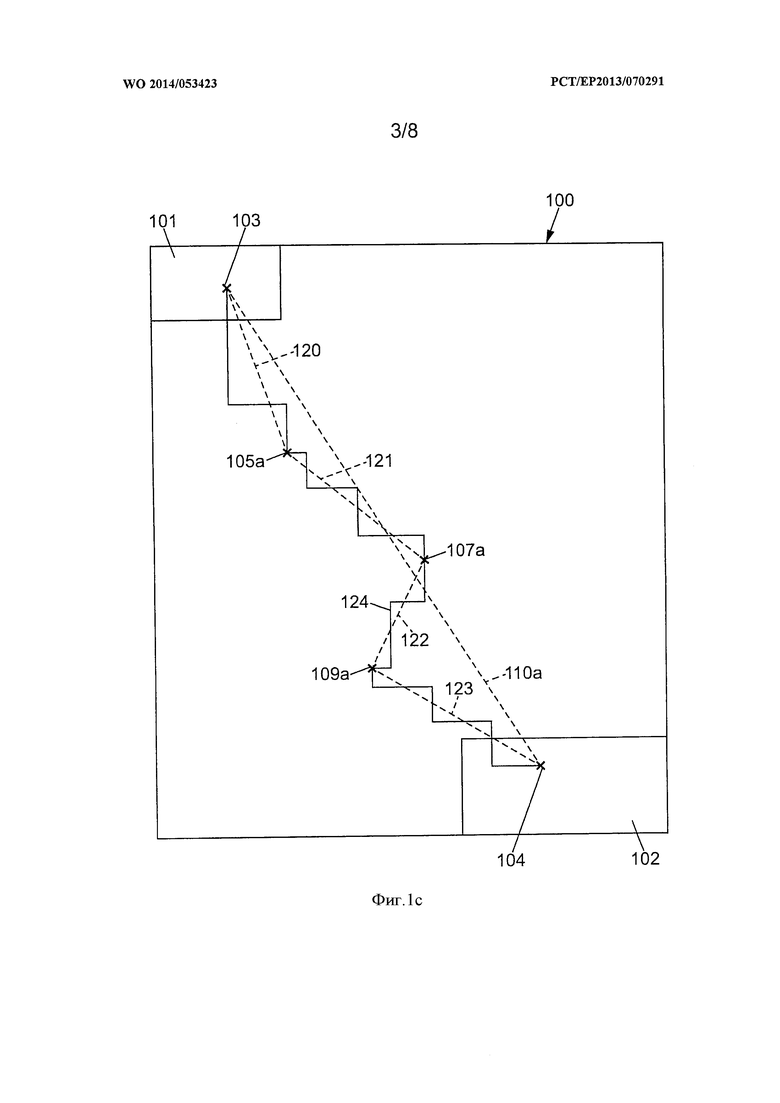
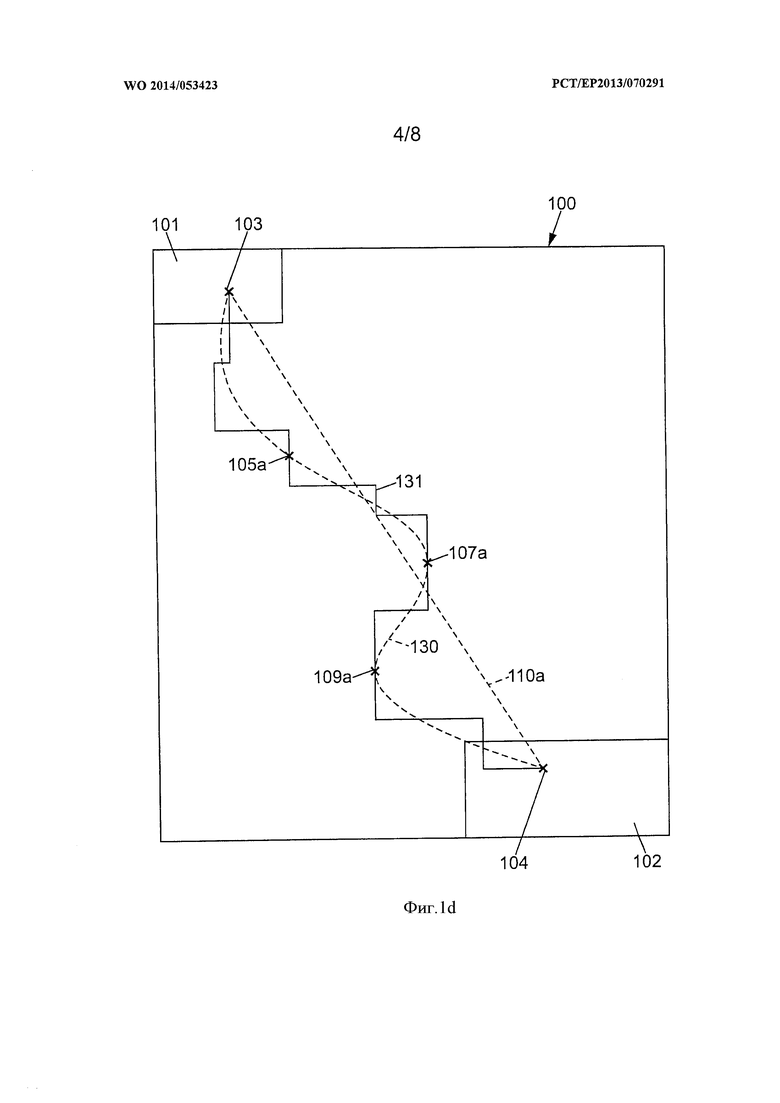
фиг. 1с и 1d - возможные варианты осуществления для определения траекторных ячеек в полученной модели в соответствии с определенными ячейками бифуркации;
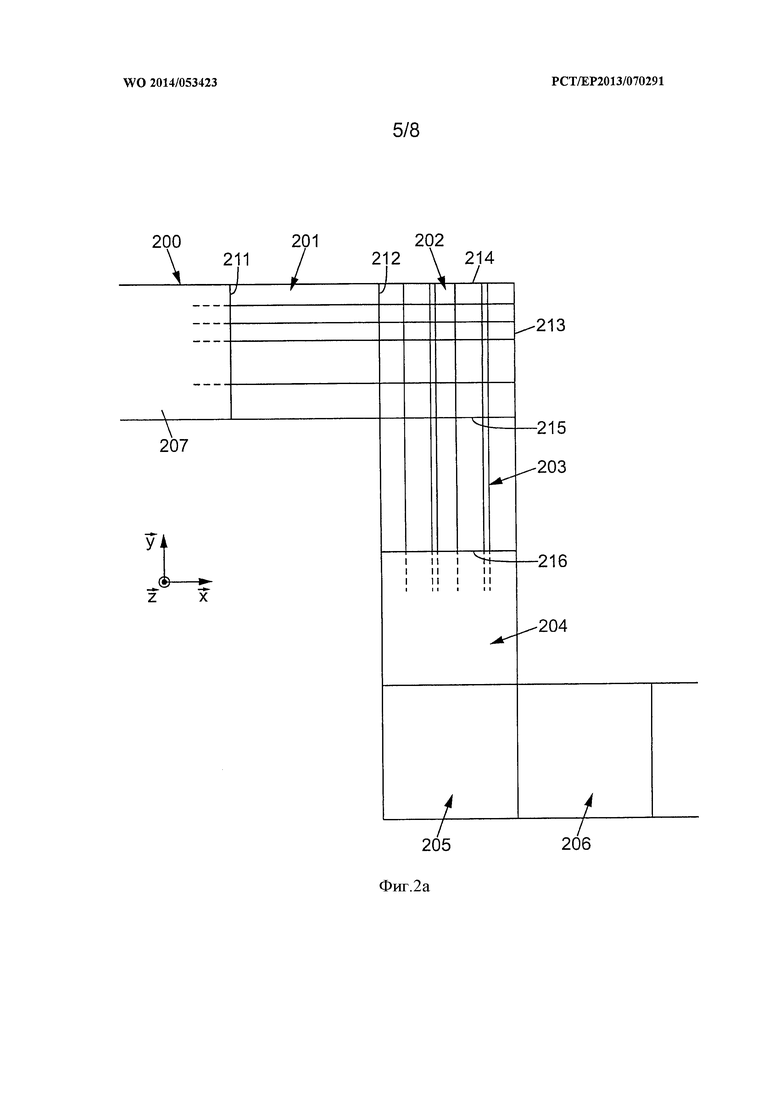
фиг. 2а - представление каналов в траекторных ячейках;
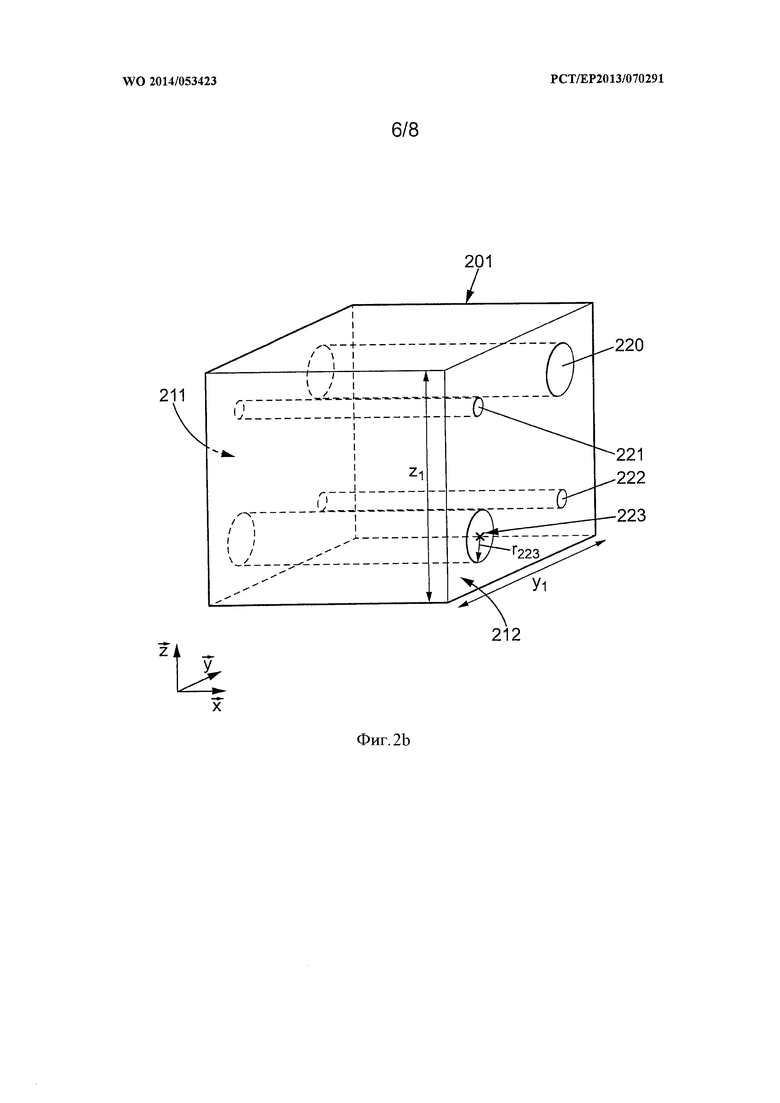
фиг. 2b - представление каналов в текущей траекторной ячейке;
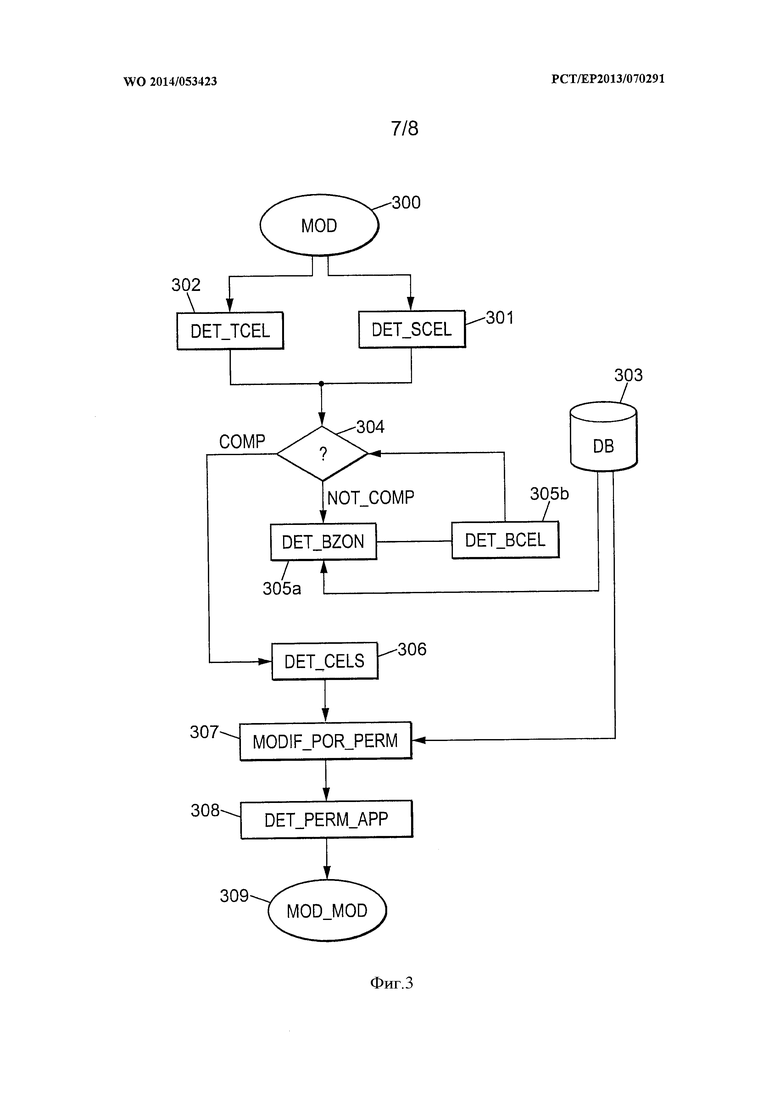
фиг. 3 - блок-схема последовательности выполнения операций возможного варианта осуществления настоящего изобретения;
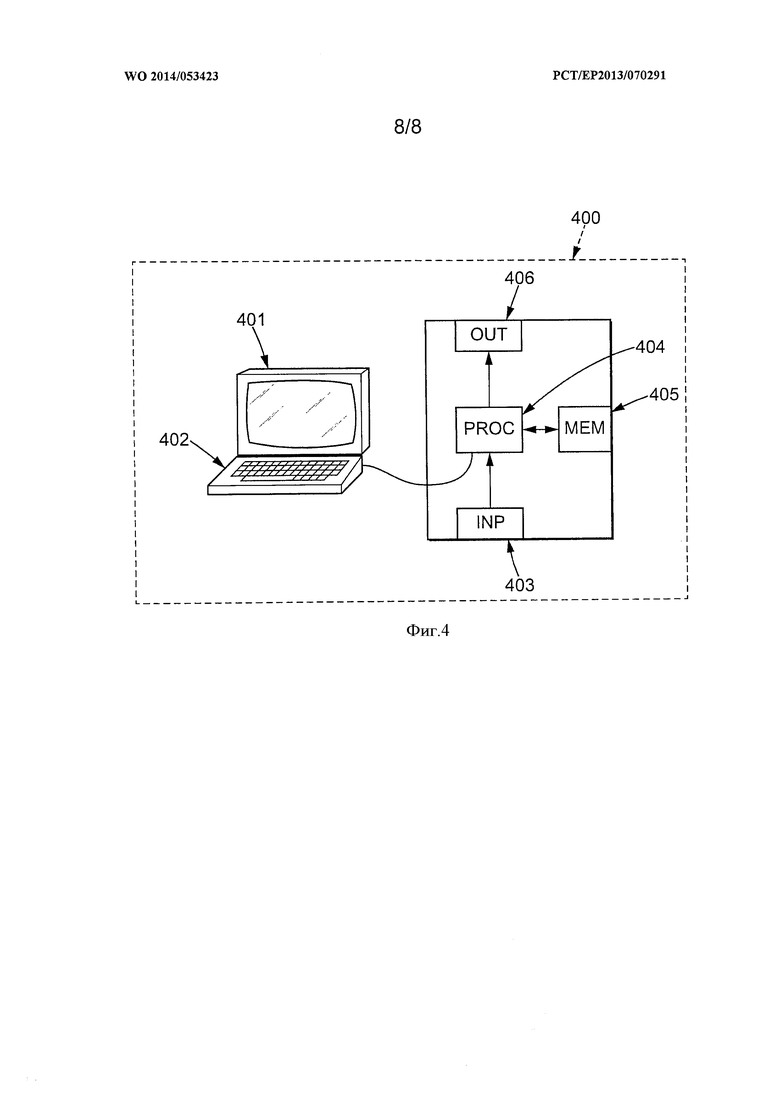
фиг. 4 - возможный вариант устройства, соответствующего настоящему изобретению.
Осуществление изобретения
На фиг.1а и lb показаны возможные варианты осуществления для определения ячеек бифуркации в полученной модели.
В полученной модели 100 группа ячеек может быть назначена в качестве исходной зоны 101. Эти ячейки могут быть идентифицированы геологами или инженерами-разработчиками в соответствии с их знанием реального подпочвенного слоя. Например, ячейки, соответствующие следующим условиям, могут быть назначены в исходной зоне:
- когда они связаны с эпикарстом;
- когда они связаны с зоной просачивания в подпочвенном слое;
- когда они связаны с известными разломами;
- и т.д.
Ячейки исходной зоны могут быть связаны со значением вероятности (например, в распределении).
Далее можно определить (например, согласно стохастическому процессу и/или согласно вероятностным значениям, связанным с ячейками исходной зоны) исходную ячейку 103.
В полученной модели 100 группа ячеек может быть назначена в качестве целевой зоны 102. Эти ячейки могут быть идентифицированы геологами или инженерами-разработчиками согласно их знанию реального подпочвенного слоя. Например, ячейки, соответствующие следующим условиям, могут быть определены в целевой зоне:
- когда они связаны с выпуском;
- когда они связаны с нижним уровнем;
- и т.д.
Ячейки целевой зоны могут быть ассоциированы со значением вероятности (например, в распределении).
Затем можно определить (например, согласно стохастическому процессу и/или согласно значениям вероятности, ассоциированным с ячейкам целевой зоны) целевую ячейку 104.
Из этой исходной ячейки 103 и из этой целевой ячейки 104 можно вычислить зону бифуркации, основываясь на полученном распределении расстояний и на полученном угловом распределении.
Угловое распределение может быть определено геологом или инженером-разработчиком и храниться в базе данных. Это угловое распределение может обеспечивать максимальное угловое отклонение (например, α на фиг. 1а или lb) и минимальное угловое отклонение (например, -α на фиг. 1а или lb). Это максимальное отклонение представляется линией 103а, определяемой так, что угол между линией 110а и линией 103а равен α. Это минимальное отклонение представляется линией 103b, определяемой так, чтобы угол между линией 110а и линией 103b был равен -α. Между максимальным отклонением и минимальным отклонением угловое распределение может быть равномерным или неравномерным (например, гауссовым и т.д.) и равняться 0 снаружи конуса, определяемого максимальным отклонением и минимальным отклонением.
Распределение расстояний может быть определено геологом или инженером-разработчиком и храниться в базе данных. Это распределение расстояний может обеспечивать максимальное расстояние (например, d1 на фиг. 1а или lb) и минимальное расстояние (например, d2 на фиг. 1а или lb). Между максимальным расстоянием и минимальным расстоянием распределение расстояний может быть равномерным или неравномерным (например, гауссовым и т.д.) и равняться 0 снаружи интервала, определяемого максимальным расстоянием и минимальным расстоянием.
Комбинация углового распределения и распределения расстояний определяет заштрихованную зону 106, называемую "зона бифуркации".
Затем можно определить (например, согласно стохастическому процессу и/или согласно угловому распределению/распределению расстояний) ячейку 105а бифуркации.
Как показано на фиг. 1а, можно многократно повторять описанный выше процесс, вычисляя ортогональную проекцию 105b ячейки 105а на линию 110а и используя эту новую ячейку, соответствующую проекции 105b, в качестве исходной ячейки. Другие проекции также возможны.
Как показано на фиг. lb, можно многократно повторять описанный выше процесс, используя ячейку 105а бифуркации в качестве исходной ячейки. Поэтому линия 110а трансформируется в линию 110b.
Процесс определения ячеек бифуркации заканчивается, когда расстояние между вновь определенной ячейкой бифуркации и целевой ячейкой становится меньше заданного расстояния (например d2, то есть, максимального расстояния).
На фиг. 1с и 1d показаны возможные варианты осуществления для определения траекторных ячеек в полученной модели в соответствии с определенными ячейками бифуркации.
Когда ячейки бифуркации определены, как подробно показано на фиг. 1а или lb (например), можно определить траекторные ячейки.
Например, на фиг. 1с сегменты определяются между двумя следующими друг за другом ячейками:
- сегмент 120 между исходной ячейкой 103 и ячейкой 105а бифуркации;
- сегмент 121 между ячейкой 105а бифуркации и ячейкой 107а бифуркации;
- сегмент 122 между ячейкой 107а бифуркации и ячейкой 109а бифуркации;
- сегмент 123 между ячейкой 109а бифуркации и целевой ячейкой 104.
Когда эти сегменты определены, можно определить ячейки модели, которые наилучшим образом аппроксимируют сегменты: их называют "траекторными ячейками". Для такого определения возможны многочисленные способы, например: алгоритм линии Брезенхэма (или "алгоритм Брезенхэма"), алгоритм DDA (или алгоритм "цифрового дифференциального анализатора") и "вычислительный алгоритм Run-Slice". Это является процессами дискретизации.
В дальнейшем эти траекторные ячейки описывают траекторию 124 в ступенчатой траектории, которая является оценкой сегментов 120-123 в соответствии с разрешающей способностью ячеек сетки.
Также можно определить кривую, которая аппроксимирует ячейки бифуркации, как описано на фиг. 1d. Это определение может использовать линейную регрессию, полиномиальный регрессию или другие регрессии, которые определяют кривую 130, которая аппроксимирует определенные ячейки. Затем выполняется дискретизация кривой 130, чтобы получить ступенчатую траекторию 131. Эта дискретизация может бытьвычислена посредством первой аппроксимации кривой с множеством определенных сегментов участка и последующего применения предыдущего алгоритма к этим сегментам. Возможны и другие процессы дискретизации.
Фиг. 2а является представлением каналов в траекторных ячейках.
Примеры траекторных ячеек 200 на фиг. 2а представлены ячейками 201, 202, 203, 204, 205, 206 и 207.
Для каждой текущей ячейки из числа траекторных ячеек (или подмножества этих траекторных ячеек) каналы определяются в текущей ячейке.
Конечно, способ моделирования карста часто разрабатывается на сеточных ячейках резервуара, имеющего типичные размеры 50-200 метров по горизонтали и 1-10 метров по вертикали. Как следствие, траекторные ячейки часто не должны рассматриваться как уникальный канал со 100-процентной полостью, поскольку полость не может быть столь огромной в реальном подпочвенном грунте.
Каналы ориентируются согласно ступенчатой траектории и перпендикулярны стороне ячейки сетки (например, в направлении  или
или  для горизонтальных каналов, в направлении
для горизонтальных каналов, в направлении  для вертикальных каналов и для трехмерных ячеек) или краю ячейки сетки (например в направлении
для вертикальных каналов и для трехмерных ячеек) или краю ячейки сетки (например в направлении  или
или  для двумерных ячеек). Например, каналы в ячейке 201 ориентируются вдоль оси
для двумерных ячеек). Например, каналы в ячейке 201 ориентируются вдоль оси  , поскольку для этой ячейки ступенчатая траектория является горизонтальной (то есть, вдоль
, поскольку для этой ячейки ступенчатая траектория является горизонтальной (то есть, вдоль  ); предыдущая ячейка 207 в траектории и последующая ячейка 202 в траектории находятся на той же самой линии, что и текущая ячейка 201. Каналы в ячейке 203 ориентированы вдоль оси
); предыдущая ячейка 207 в траектории и последующая ячейка 202 в траектории находятся на той же самой линии, что и текущая ячейка 201. Каналы в ячейке 203 ориентированы вдоль оси  , поскольку для этой ячейки ступенчатая траектория вертикальна (то есть, вдоль
, поскольку для этой ячейки ступенчатая траектория вертикальна (то есть, вдоль  ); предыдущая ячейка 202 в траектории и последующей ячейке 204 в траектории находятся в том же самом столбце, что и текущая ячейка 203. Для "угловой" ячейки, то есть, ячейки, где траектория изменяет свое направление с первого направления (то есть,
); предыдущая ячейка 202 в траектории и последующей ячейке 204 в траектории находятся в том же самом столбце, что и текущая ячейка 203. Для "угловой" ячейки, то есть, ячейки, где траектория изменяет свое направление с первого направления (то есть,  ) на второе направление (то есть,
) на второе направление (то есть,  ) и каналы ориентируются в соответствии с первым и вторым направлениями. Затем в ячейке 202 каналы ориентируются в соответствии с обоими направлениями,
) и каналы ориентируются в соответствии с первым и вторым направлениями. Затем в ячейке 202 каналы ориентируются в соответствии с обоими направлениями,  и
и  .
.
Чтобы определить характеристики каналов (например, их количество), можно указать плотность каналов в ячейке (то есть, количество каналов на единицу сечения, перпендикулярного направлению канала). Эта плотность может быть простым числом, распределением или интервалом (то есть, равномерным распределением). Если указаны распределение или интервал, для каждой ячейки из числа траекторных ячеек может бытьвыполнен случайный выбор, чтобы определить число
в ячейке (то есть, количество каналов на единицу сечения, перпендикулярного направлению канала). Эта плотность может быть простым числом, распределением или интервалом (то есть, равномерным распределением). Если указаны распределение или интервал, для каждой ячейки из числа траекторных ячеек может бытьвыполнен случайный выбор, чтобы определить число 
Как показано на фиг. 2b, сечение равно S=zly1 и, таким образом, можно определить количество каналов в ячейке вдоль направления, поскольку S и  известны.
известны.
В данном случае в ячейке 201 определены четыре канала (220, 221, 222 и 223). Эти каналы перпендикулярны сторонам 211 и 212.
Для определения характеристик каналов (например, их размеров), можно указать радиус апертуры каналов rc. Если имеются распределение или интервал, то случайный выбор может быть выполнен для каждой ячейки, чтобы определить численное значение rс (смотрите радиус r223, радиус канала 223 на фиг. 2b).
Случайный выбор может быть выполнен для всех каналов в ячейке (то есть, один и тот же радиус используется для всех каналов) или для каждого канала в ячейке (то есть, каждый канал может иметь индивидуальный радиус).
На фиг. 3 представлена блок-схема последовательности выполнения операций возможного варианта осуществления настоящего изобретения. Часть этой блок-схемы может представлять этапы примера компьютерной программы, которая может исполняться устройством, показанным на фиг. 4.
После получения геологической модели 300 реальной или предположительной карстовой области, в модели идентифицируют исходную зону и целевую зону. Эта идентификация выполняется путем сканирования ячеек модели и поиска специального флага. Также можно получить в отдельном сообщении указание списка ячеек, находящихся в упомянутых зонах. Кроме того, эти зоны могут содержать множество подзон, связанных или не связанных.
Когда исходная зона известна, в исходной зоне может быть определена исходная ячейка (этап 301). Например, исходная ячейка может быть определена посредством стохастического процесса: случайный выбор выполняется в первом распределении, связанном с ячейками исходной зоны.
Когда целевая зона известна, в целевой зоне может быть определена целевая ячейка (этап 301). Например, целевая ячейка может быть определена посредством стохастического процесса: случайный выбор выполняется в распределении, связанном с ячейками целевой зоны.
Первое и второе распределения могут быть равномерными или неравномерными. Эти распределения часто определяются геологами или инженерами-разработчиками.
Когда исходная ячейка и целевая ячейка определены, как подробно описано выше,вычисляют расстояние между этими двумя ячейками.
Если это вычисленное расстояние превышает заданное расстояние (тест 304, результат NOT_COMP), зона бифуркации (этап 305а) и точка бифуркации (этап 305b) определяются, как подробно представлено на фиг. 1а или фиг. lb и в приведенном описании. Упомянутые распределение расстояний и угловое распределение могут сохраняться, например, в базе 303 данных или как часть памяти компьютера.
Если это расстояние меньше или равно заданному расстоянию (тест 304, результат СОМР), исходная ячейка, целевая ячейка и бифуркация могут быть упорядочены и траекторные ячейки могут быть определены, как объясняется выше.
Когда траекторные ячейки определены, можно модифицировать (этап 307) характеристику проницаемости и характеристику пористости. Чтобы произвести такие модификации, каналы могут быть оценены в ячейках в соответствии с процессом, описанным на фиг. 2а и 2b и в приведенном описании.
Затем можно определить (этап 308) характеристики ячейки (например, проницаемость и пористость каждой ячейки модели).
Далее предполагается, что каждая ячейка i модели имеет параметр φi,init начальной пористости и параметр Кi,init начальной проницаемости. Если начальная пористость (соответственно, начальная проницаемость) не установлена, принимается φi,init=0 (соответственно, Ki,init=0).
Чтобы определить характеристику пористости (в заданном направлении) заданной ячейки i, для каждого канала в этой ячейке i в этом направлении, новое значение устанавливается равным φi,init, то есть,  где Sc - сечение текущего канала и S - сечение ячейки, перпендикулярное этому направлению (предполагается, что ячейка является прямоугольным параллелепипедом, например, на фиг. 2b, направлением является
где Sc - сечение текущего канала и S - сечение ячейки, перпендикулярное этому направлению (предполагается, что ячейка является прямоугольным параллелепипедом, например, на фиг. 2b, направлением является  , сечение равно z1y1). Это новое значение может также быть равным
, сечение равно z1y1). Это новое значение может также быть равным
 где фdiff - диффузная пористость, образованная вокруг каналов.
где фdiff - диффузная пористость, образованная вокруг каналов.
Многократно повторяя этот процесс для всех каналов и всех траекторий (если существует множество траекторий), ячейки модели могут быть обновлены новыми характеристиками пористости.
Чтобы определить характеристику проницаемости (в заданном направлении) заданной ячейки i, для каждого канала в этой ячейке i в этом направлении, новое значениеустанавливается равным Ki,init, то есть  где Sc - сечение текущего канала (то есть, если радиус равен r, сечение канала равно π.r2), S - сечение ячейки, перпендикулярное этому направлению, и Kс - проницаемость текущего канала. Эта проницаемость текущего канала вычисляется, основываясь на аналогии с законом Пуазейля для потока в трубах: в результате,
где Sc - сечение текущего канала (то есть, если радиус равен r, сечение канала равно π.r2), S - сечение ячейки, перпендикулярное этому направлению, и Kс - проницаемость текущего канала. Эта проницаемость текущего канала вычисляется, основываясь на аналогии с законом Пуазейля для потока в трубах: в результате,  где Nc - количество каналов в этом направлении в рассматриваемой ячейке i и ri - радиус текущего канала. Возможны и любые другие аналогии или небольшие вариации.
где Nc - количество каналов в этом направлении в рассматриваемой ячейке i и ri - радиус текущего канала. Возможны и любые другие аналогии или небольшие вариации.
Многократно повторяя этот процесс для всех каналов и всех траекторий (если существует множество траекторий), ячейки модели могут быть обновлены новыми характеристиками проницаемости.
Когда эти характеристики определены для всех ячеек модели (или по меньшей мере для поднабора ячеек), новая модель 309 может быть предоставлена:
- устройству отображения, на котором она должна отображаться, или
- любому другому устройству обработки для дополнительного изменения или преобразования.
На фиг. 4 представлен возможный вариант осуществления устройства, соответствующего настоящему изобретению.
В этом варианте осуществления устройство 400 содержит компьютер, причем этот компьютер содержит устройство 405 памяти для хранения программных команд, пригодных для загрузки в схему и выполненных с возможностью приказания схеме 404 выполнять этапы настоящего изобретения, когда программные команды действуют в схеме 404.
Устройство 405 памяти может также хранить данные и полезную информацию для выполнения этапов настоящего изобретения, как описано выше.
Схема 404 может быть, например:
- процессором или блоком обработки, выполненным с возможностью интерпретации команд на машинном языке, причем процессор или устройство обработки могут содержать, могут быть связаны или быть соединены с устройством памяти, содержащим команды, или
- объединением процессора/устройства обработки и устройства памяти, причем процессор или устройство обработки выполнены с возможностью интерпретации команд на компьютерном языке и устройство памяти содержит упомянутые команды, или
- электронной платой, для которой этапы изобретения описываются каквыполняемые внутри кремниевых чипов, или
- программируемым электронным чипом, таким как чип FPGA (программируемая логическая интегральная схема, ПЛИС).
Этот компьютер содержит входной интерфейс 403 для приема модели, соответствующей изобретению, и выходной интерфейс 406 для предоставления параметров этой модели (то есть, пористость для каждой ячейки и проницаемость для каждой ячейки).
Для облегчения взаимодействия с компьютером, к схеме компьютера 404 могут придаваться и присоединяться монитор 401 и клавиатура 402.
Такие выражения, как "содержат", "включают", "объединяют", "состоят" и "имеют", должны рассматриваться неисключающим образом, когда интерпретируется описание и связанная с ним формула изобретения, а именно, истолковываться так, чтобы позволить также присутствие других позиций или компонент, которые здесь не определены явно. Ссылка на единственное число должна также рассматриваться как ссылки на множественное число и наоборот.
Специалист в данной области техники должен легко понять, что различные параметры, раскрытые в описании, могут модифицироваться и что различные раскрытые варианты осуществления могут объединяться, не отступая от объема изобретения.
Например, в двумерном пространстве обеспечивается много примеров, но они также относятся к трехмерному пространству.
Настоящее изобретение относится к способу определения карстовой области, модифицированной процессами карстообразования. Способ включает определение исходя из геологической модели исходной ячейки (103) и целевой ячейки (104) в этой модели. Если расстояние между исходной ячейкой и целевой ячейкой превышает заданное расстояние (304), можно обновить исходную ячейку с помощью ячейки бифуркации на основе по меньшей мере координат исходной ячейки, координат целевой ячейки, распределения расстояний, углового распределения и многократно повторять проверку. На основе этих ячеек бифуркации вычисляют траекторию, и ячейки на этой траектории обновляются новыми характеристиками ячеек. Технический результат – повышение точности получаемых данных. 2 н. и 14 з.п. ф-лы, 8 ил.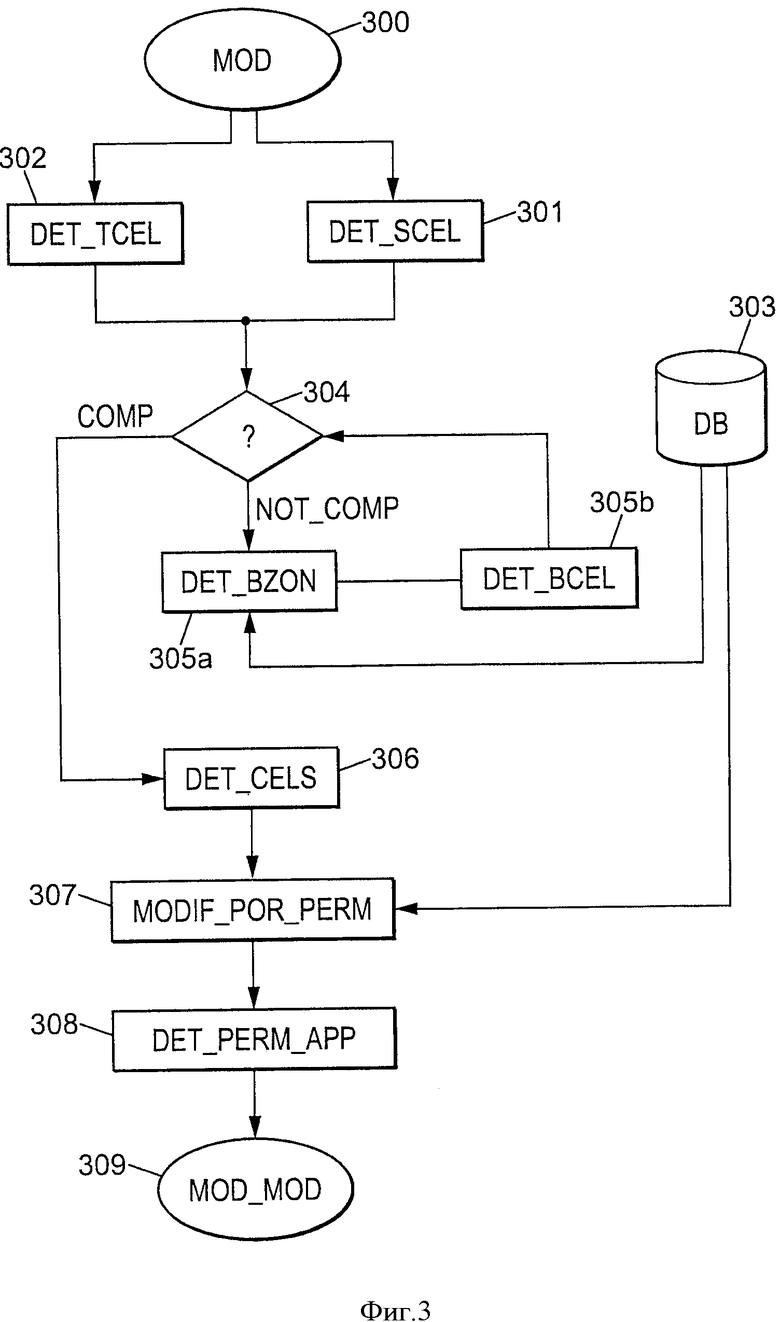
1. Способ определения карстовой области, измененной явлением карстообразования, содержащий этапы, на которых
a) принимают геологическую модель (100, 300) карстовой области, содержащую ячейки, причем упомянутая модель содержит по меньшей мере одну исходную зону (101), содержащую ячейки модели, и по меньшей мере одну целевую зону (102), содержащую ячейки модели, и каждая из ячеек модели имеет координаты;
b) определяют исходную ячейку (103) из указанных ячеек указанной по меньшей мере одной исходной зоны;
c) определяют целевую ячейку (104) из указанных ячеек указанной по меньшей мере одной целевой зоны;
d) если расстояние между исходной ячейкой и целевой ячейкой превышает заданное расстояние (304):
d1) определяют (305а) зону (106) бифуркации на основе по меньшей мере координат исходной ячейки, координат целевой ячейки, распределения расстояний, углового распределения,
d2) определяют (305b) ячейку бифуркации (105а) в упомянутой зоне бифуркации;
d3) повторяют этап d) для ячейки (105b), исходя из того, что упомянутая ячейка (105а) бифуркации определена в качестве исходной ячейки;
e) определяют в геологической модели траекторные ячейки на основе исходной ячейки, целевой ячейки и ячеек бифуркации, определенных на этапе d);
f) для каждой текущей ячейки в траекторных ячейках
f1) определяют (307) канальные характеристики на основе заданного распределения плотности каналов, заданного распределения проходов каналов и траекторных ячеек, связанных с упомянутой текущей ячейкой;
f2) определяют характеристики ячеек на основе канальных характеристик упомянутой текущей ячейки.
2. Способ по п. 1, в котором этапы b)-f) многократно повторяют с одной и той исходной зоной и целевой зоной.
3. Способ по п. 1, в котором упомянутая модель содержит множество исходных зон и множество целевых зон, а этапы b)-f) повторяют многократно с различными комбинациями исходной зоны из указанного множества исходных зон и целевой зоны из указанного множества целевых зон.
4. Способ по п. 1, в котором исходную ячейку определяют на этапе b) в соответствии со стохастическим процессом и согласно заданному распределению в указанной по меньшей мере одной исходной зоне.
5. Способ по п. 1, в котором целевую ячейку определяют на этапе с) в соответствии со стохастическим процессом и согласно заданному распределению в указанной по меньшей мере одной целевой зоне.
6. Способ по п. 1, в котором ячейка (105b), определенная на основе упомянутой ячейки (105а) бифуркации, является упомянутой ячейкой бифуркации.
7. Способ по п. 1, в котором ячейка (105b), определенная на основе упомянутой ячейки (105а) бифуркации, является ячейкой, соответствующей проекции ячейки бифуркации на линию (110а), определяемую указанными исходной ячейкой и целевой ячейкой.
8. Способ по п. 1, в котором определяют траекторные ячейки посредством выполнения этапов, на которых
- упорядочивают указанные ячейки бифуркации в списке ячеек в соответствии с порядком определения на этапе d);
- добавляют указанную исходную ячейку в первую позицию в упомянутом списке ячеек;
- добавляют указанную целевую ячейку в последнюю позицию в упомянутом списке ячеек;
- определяют сегменты в модели между двумя следующими друг за другом ячейками в указанном списке ячеек;
- определяют ячейки модели на основе алгоритма линии аппроксимации.
9. Способ по п. 8, в котором алгоритм линии аппроксимации является алгоритмом, выбранным из группы, содержащей алгоритм Брезенхэма, алгоритм DDA и вычислительный алгоритм Run-Slice.
10. Способ по п. 1, в котором определяют траекторные ячейки посредством выполнения этапов, на которых
- упорядочивают ячейки бифуркации в списке ячеек в соответствии с порядком определения на этапе d);
- добавляют указанную исходную ячейку в первую позицию в упомянутом списке ячеек;
- добавляют указанную целевую ячейку в последнюю позицию в упомянутом списке ячеек;
- определяют кривую интерполяции, аппроксимирующую список ячеек в указанной модели;
- определяют ячейки модели на основе алгоритма кривой аппроксимации.
11. Способ по п. 1, в котором при определении канальных характеристик
- для ячейки, являющейся двумерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере одному краю текущей ячейки, если край упомянутой текущей ячейки, перпендикулярный упомянутому направлению, является общим с траекторной ячейкой, связанной с упомянутой текущей ячейкой, определяют по меньшей мере один канал в упомянутой текущей ячейке в упомянутом направлении, при этом радиус rc упомянутого канала определен в упомянутом заданном распределении проходов каналов, или
- для ячейки, являющейся трехмерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере одной стороне текущей ячейки, если сторона упомянутой текущей ячейки, перпендикулярная упомянутому направлению, является общей с траекторной ячейкой, связанной с упомянутой текущей ячейкой, определяют по меньшей мере один канал в упомянутой текущей ячейке в упомянутом направлении, при этом радиус rc упомянутого канала определен в упомянутом заданном распределении проходов каналов.
12. Способ по п. 1, в котором при определении канальных характеристик
- для ячейки, являющейся двумерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере одному краю текущей ячейки, если край упомянутой текущей ячейки, перпендикулярный упомянутому направлению, является общим с траекторной ячейкой, связанной с упомянутой текущей ячейкой,
- определяют количество Nc каналов, которые должны быть определены на основе упомянутого заданного распределения плотности каналов;
- определяют Nc каналы в упомянутой текущей ячейке в упомянутом направлении; или
- для ячейки, являющейся трехмерной ячейкой, для каждого направления пространства, перпендикулярного по меньшей мере одной стороне текущей ячейки, если сторона упомянутой текущей ячейки, перпендикулярная упомянутому направлению является общей с траекторной ячейкой, связанной с упомянутой текущей ячейкой,
- определяют количество Nc каналов, которые должны быть определены на основе упомянутого заданного распределения плотности каналов;
- определяют Nc каналы в упомянутой текущей ячейке в упомянутом направлении.
13. Способ по п. 11 или 12, в котором при определении характеристик ячейки выполняют этапы, на которых
- получают начальную характеристику пористости φm текущей ячейки;
- устанавливают эквивалентную пористость φeq равной φm;
- по меньшей мере для одного текущего канала в текущей ячейке в упомянутом направлении
- вычисляют пористость φtemp текущей ячейки на основе выражения  , где Sc - сечение текущего канала и S - сечение упомянутого края или стороны упомянутой текущей ячейки, которые перпендикулярны упомянутому направлению и являются общими с траекторной ячейкой;
, где Sc - сечение текущего канала и S - сечение упомянутого края или стороны упомянутой текущей ячейки, которые перпендикулярны упомянутому направлению и являются общими с траекторной ячейкой;
- устанавливают эквивалентную пористость φeq равной φtemp.
14. Способ по п. 11 или 12, в котором при определении характеристик ячейки дополнительно выполняют этапы, на которых
- получают характеристику Km начальной проницаемости текущей ячейки;
- устанавливают эквивалентную проницаемость Keq равной Km;
- по меньшей мере для одного текущего канала в текущей ячейке в упомянутом направлении
- вычисляют проницаемость Ktemp текущей ячейки на основе выражения  , где Sc - сечение текущего канала, S - сечение упомянутого края или стороны упомянутой текущей ячейки, которые перпендикулярны упомянутому направлению и являются общими с траекторной ячейкой, и Kc - проницаемость текущего канала;
, где Sc - сечение текущего канала, S - сечение упомянутого края или стороны упомянутой текущей ячейки, которые перпендикулярны упомянутому направлению и являются общими с траекторной ячейкой, и Kc - проницаемость текущего канала;
- устанавливают эквивалентную проницаемость Keq равной Ktemp.
15. Способ по п. 14, в котором проницаемость текущего канала вычисляют на основе выражения  .
.
16. Считываемый компьютером носитель для хранения данных, имеющий хранящуюся на нем компьютерную программу, содержащую программные команды, причем компьютерная программа пригодна для загрузки в блок обработки данных и выполнена с возможностью вызывать выполнение блоком обработки данных этапов любого из пп. 1-15, когда компьютерная программа выполняется на устройстве обработки данных.
| WO 2012045937 A2, 12.04.2012 | |||
| US 7310579 B2, 18.12.2007 | |||
| US 20060241925 A1, 26.10 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 20050010383 A1, 13.01.2005 | |||
| US 20100138196 A1, 03.06.2010. | |||

