Область техники
Настоящее изобретения относится в целом к устройству и способам выполнения измерений, относящихся к разведке на нефть и газ.
Уровень техники
При бурении скважин для разведки на нефть и газ, исследование структуры и свойств сопряженной геологической формации обеспечивает информацию, помогающую в этой разведке. Кроме того, обеспечение оптимального расположения ствола скважины может быть критичным для повышения максимальной нефтедобычи. Для активного регулирования положения скважины применялся электромагнитный (ЭМ-) зонд каротажа сопротивлений в азимутальном направлении, благодаря чему обеспечивалась возможность получения оптимизированного плана бурения. Сопутствующей сферой применения такого зонда является геологическое сопровождение бурения, которое представляет собой целенаправленное управление для регулирования направления бурения. Геофизический сигнал представляет собой сигнал или параметр, который может быть использован для геологического сопровождения бурения. Ответные азимутальные геофизические сигналы могут быть использованы для управления ориентацией профиля скважины в реальном времени, а также же для выдерживания направления скважины на целевую зону формации. Широко известно, что существующие азимутальные ЭМ-зонды, используемые при геологическом сопровождении бурения, сталкиваются с проблемой «мертвой зоны» в условиях бурения, при которых каротажный зонд находится в слоистой геологической формации с симметричными профилями удельных сопротивлений. В таких условиях ответные геофизические сигналы существующих (обычных) направленных ЭМ-зондов становятся весьма нечувствительными к влиянию такой слоистой формации, в результате чего петрофизики могут неправильно интерпретировать геологическую структуру данной формации, основываясь на обычных геофизических сигналах. Примером предельно сложного случая является нахождение зонда в среднем слое 3-слойной формации с симметричным профилем удельной проводимости, когда этот средний слой имеет удельную проводимость выше, чем верхний и нижний слои. При этих условиях бурения геофизический сигнал является очень слабым, и у петрофизиков может создаться ошибочное впечатление, что бурение ведется в гомогенной формации.
WO 2011/129828 A1 раскрывает различные варианты, включающие в себя устройство и способы обработки и геологического сопровождения, при использовании скважинного каротажа. Способы и соответствующие устройства могут использовать сбор сигналов, генерируемых в результате работы зонда, вращающегося в стволе скважины, причем этот зонд содержит приемную антенну, наклоненную к продольной оси зонда, и две передающих антенны. Собранные сигналы могут быть обработаны с учетом направления вращения зонда для определения свойств, связанных с формацией, и/или для определения геофизического сигнала для геологического сопровождения операции бурения. WO 2011/129828 A1 содержит раскрытие преобразования собранных сигналов в связные компоненты.
Патентная публикация США 2008/0078580 относится к системам и способам для определения границ пластов и азимутального каротажа сопротивления с помощью одного зонда. Некоторые варианты способа включают в себя каротаж скважины с помощью азимутально-чувствительного зонда каротажа сопротивлений; получение диаграммы каротажа сопротивлений и сигнала определения границы на основе результатов измерений, осуществленных с помощью указанного зонда; и отображение сигнала определения границы и/или диаграммы каротажа сопротивлений. Результаты измерений при каротаже сопротивлений могут представлять собой компенсированные каротажные диаграммы, т.е. диаграммы, полученные в результате измерений посредством одной или более симметричных компоновок передатчик-приемник. Хотя симметричные компоновки также могут служить в качестве основы для получения сигнала определения границы, более значительная глубина исследования может быть достигнута с использованием асимметричной компоновки. Таким образом, сигнал определения границы может быть некомпенсированным.
Краткое описание чертежей
Фиг. 1 показывает блок-схему варианта иллюстративного устройства, имеющего зондовую конструкцию, выполненную с возможностью работы в скважине для определения свойств формации, согласно различным вариантам.
Фиг. 2 показывает иллюстративный пример антенной конфигурации многокомпонентного электромагнитного каротажного зонда, согласно различным вариантам.
Фиг. 3 показывает зонд, выполненный с возможностью работы в качестве азимутального глубинного датчика удельной проводимости, согласно различным вариантам.
Фиг. 4А-4В показывают трехслойную формацию с симметричными по удельному сопротивлению структурами и фазовые характеристики ответного геофизического сигнала в конфигурации зонда на фиг. 2 при работе вдоль профиля, пролегающего внутри трехслойной формации, согласно различным вариантам.
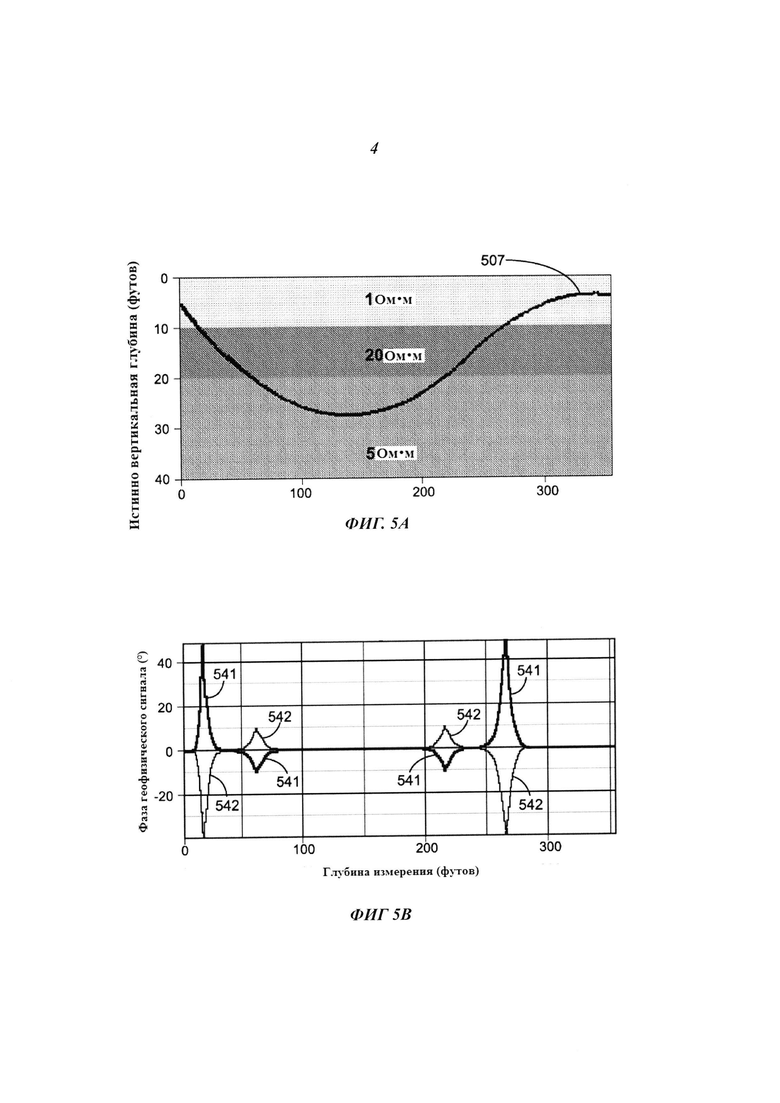
Фиг. 5А-5В показывают трехслойную формацию без симметричных по удельному сопротивлению структур и фазовые характеристики ответного геофизического сигнала в конфигурации зонда на фиг. 2 при работе вдоль профиля, пролегающего внутри трехслойной формации, согласно различным вариантам.
Фиг. 6А-6С показывают характеристики магнитного поля ответного сигнала, связанные с передатчиком Т6 и приемником R1 в конфигурации зонда на фиг. 3 в модели формации на фиг. 3А, согласно различным вариантам.
Фиг. 7А-7С показывают характеристики магнитного поля ответного сигнала, связанного с компонентами XX и YY в модели формации на фиг. 4А, согласно различным вариантам.
Фиг. 8 показывает конфигурацию антенной системы, оснащенной наклонным приемником и наклонным передатчиком, согласно различным вариантам.
Фиг. 9 показывает конфигурацию позиций бинов зонда и соответствующие азимутальные углы, согласно различным вариантам.
Фиг. 10 показывает конфигурацию электромагнитного зонда, оснащенного как наклонными передатчиками, так и наклонными приемниками, согласно различным вариантам.
Фиг. 11А-11В показывают ответные геофизические сигналы первого типа в конфигурации зонда на фиг. 10 для модели формации на фиг. 6А, согласно различным вариантам.
Фиг. 12А-12В показывают ответные геофизические сигналы второго типа в конфигурации зонда на фиг. 10 для модели формации на фиг. 6А, согласно различным вариантам.
Фиг. 13А-13В показывают диаграммы геофизического сигнала первого типа в конфигурации зонда на фиг. 10 для модели формации на фиг. 6А, согласно различным вариантам.
Фиг. 14А-14В показывают диаграммы геофизического сигнала второго типа в конфигурации зонда на фиг. 10 для модели формации на фиг. 6А, согласно различным вариантам.
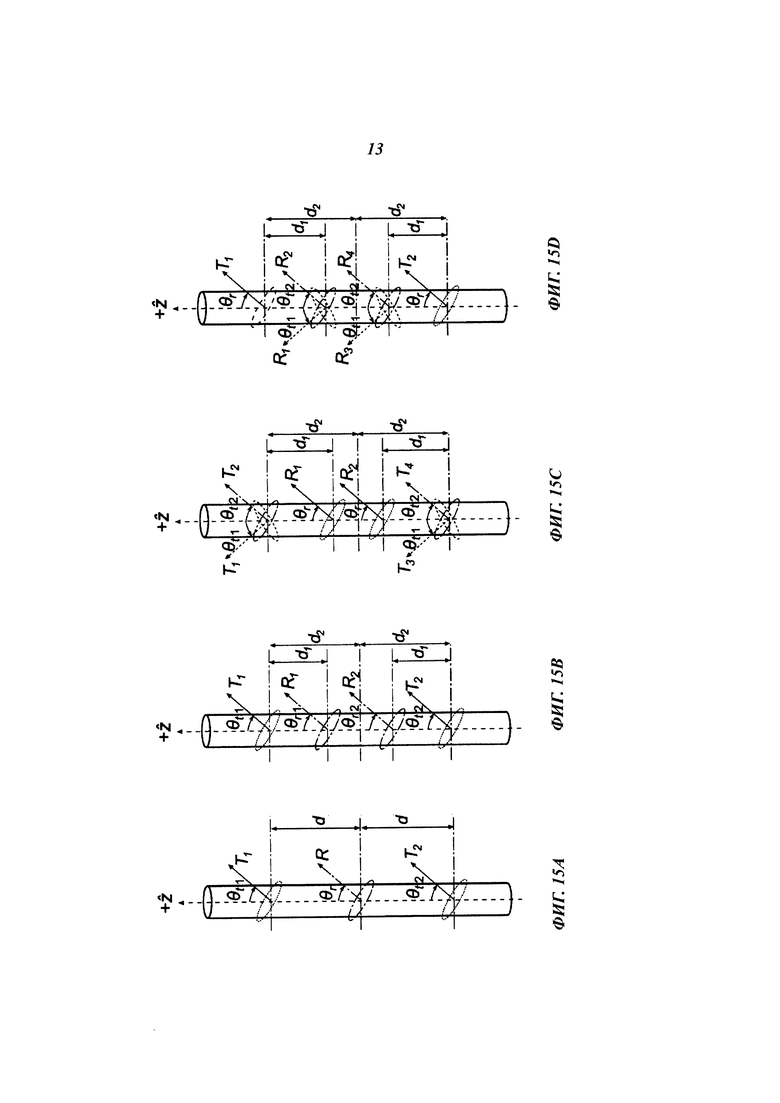
Фиг. 15A-15D показывают конфигурации антенны, выполненные с возможностью сбора компенсированных ответных геофизических сигналов, согласно различным вариантам.
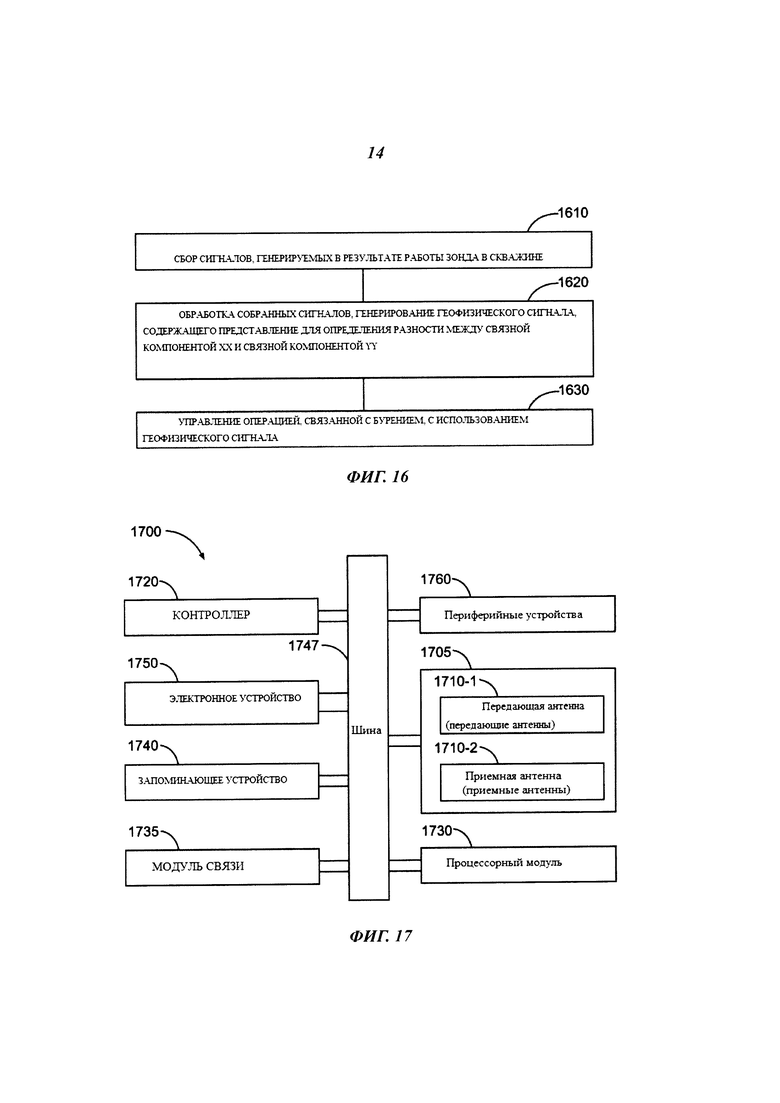
Фиг. 16 показывает отличительные особенности иллюстративного способа осуществления связанных с бурением операций с использованием геофизического сигнала, согласно различным вариантам.
Фиг. 17 показывает блок-схему отличительных особенностей иллюстративной системы, выполненной с возможностью осуществления измерений в скважине и обработки измеренных сигналов с целью осуществления связанных с бурением операций с использованием геофизического сигнала, согласно различным вариантам.
Фиг. 18 показывает вариант системы на месте бурения; эта система содержит измерительный зонд и процессорный модуль, выполненные с возможностью осуществления связанных с бурением операций с использованием геофизического сигнала, согласно различным вариантам.
Подробное раскрытие
Нижеследующее подробное раскрытие ссылается на сопроводительные чертежи, показывающие, в иллюстративных неограничительных целях, различные варианты, в которых может быть реализовано настоящее изобретение. Эти варианты раскрыты в существенных деталях с тем, чтобы обеспечить возможность для специалистов в данной области техники реализовать на практике эти и другие варианты. Могут быть реализованы другие варианты, а в раскрытые варианты могут быть внесены структурные, логические и электрические изменения. Различные варианты не обязательно являются взаимоисключающими, поскольку некоторые варианты могут комбинироваться с одним или более другими вариантами с целью создания новых вариантов. Нижеследующее подробное раскрытие, таким образом, не должно рассматриваться в ограничительном смысле.
Управление геологическим сопровождением может быть основано на результатах скважинного каротажа для увеличения степени вскрытия буровой скважиной нефтегазоносной формации («продуктивного пласта»). Такое геологическое сопровождение может быть использовано для поддержания ствола скважины в пределах области, которая обеспечивает материал, являющийся источником промышленной ценности. Свойства геофизических сигналов полезны при геологическом сопровождении для оптимизации расположения скважины с целью максимальной нефтедобычи. Геофизические сигналы, показывающие направление буровых инструментов в скважине, пригодны для определения границ. В дополнение, геофизический сигнал может использоваться для вычисления расстояния до границ пласта. Раскрытые здесь устройство и схемы обработки обеспечивают возможность генерирования геофизических сигналов.
Фиг. 1 показывает блок-схему варианта устройства 100, имеющего зондовую конструкцию 105, выполненную с возможностью работы в скважине с целью определения свойств формации. Зондовая конструкция 105 содержит массив датчиков 110-1, 110-2…110-(N-1), 110-N, расположенных вдоль продольной оси 107 зонда 105. Каждый датчик 110-1, 110-2…110-(N-1), 110-N может быть наклонен к продольной оси 107. Наклонным является такой датчик, который расположен на зондовой конструкции 105 под выбранным углом, превышающим допустимые углы, связанные с датчиком, закрепленным параллельно или перпендикулярно продольной оси 107. Термин «наклонный» означает, что плоскость данного датчика не перпендикулярна продольной оси 107. Угол наклона может быть измерен между продольной осью 107 и нормалью к плоскости датчика и может быть указан как положительный или отрицательный угол, меньший 90°. Обычно угол наклона представляет собой абсолютную величину от 5° до 85°. Массив датчиков может содержать одну или более комбинаций передающих датчиков и приемных датчиков, имеющих определенные углы наклона. Конфигурация передающих датчиков и приемных датчиков может сформировать симметричный датчик-зонд.
Зондовая конструкция 105 может содержать одну или более групп передающих датчиков и приемных датчиков, расположенных симметрично, и одну или более групп передающих датчиков и приемных датчиков, не расположенных симметрично. Симметричное или асимметричное расположение может быть осуществлено путем выборочного управления выбранными группами датчиков 110-1, 110-2…110-(N-1), 110-N для передачи и выбранными группами датчиков 110-1, 110-2…110-(N-1), 110-N для приема. Работа симметричного датчика-зонда обеспечивает возможность структурной компенсации для генерирования компенсированных сигналов, которые могут обрабатываться с целью определения параметров формации. Обработка выбранных принятых сигналов, коррелированных с выбранными генерируемыми сигналами, обеспечивает возможность получения геофизических сигналов, которые могут использоваться для получения точных данных при анизотропных измерениях и для точной оценки формаций как при проводном применении, так и при применении для измерений в процессе бурения (MWD), в частности для каротажа в процессе бурения (LWD).
В различных вариантах упомянутые здесь компоновки датчиков могут включать в себя различные типы датчиков. Например, как передающие датчики, так и приемные датчики могут представлять собой антенны. Датчики могут быть выполнены в виде катушки, соленоида, магнитометра или в виде других аналогичных датчиков. В случае датчиков в виде катушки угол наклона может быть обеспечен путем намотки катушки под этим углом. В случае соленоида угол возвышения сердечника может быть отрегулирован до нужного угла наклона. В случае магнитометра устройство может быть закреплено на или в зондовой конструкции 105 под нужным углом наклона.
Устройство 100 может содержать модуль 120 управления, который управляет генерированием передаваемых сигналов и сбором принимаемых сигналов, соответствующих передаваемым сигналам. Модуль 120 управления может быть выполнен с возможностью выбора конкретных датчиков 110-1, 110-2…110-(N-1), 110-N в качестве приемных датчиков с целью формирования симметричного датчика-зонда. Модуль 120 управления может управлять активацией выбранных передающих датчиков и сбором сигналов от выбранных приемных датчиков, так что измеренные сигналы могут использоваться для генерирования компенсированных сигналов, относящихся к связным компонентам, как было указано выше. Активация датчика означает генерирование передаваемого сигнала от этого датчика. Это генерирование передаваемых сигналов может быть осуществлено с целью получения сигналов различных частот. Каждая из этих различных частот может быть связана с отдельным передающим датчиком. Собранные принятые сигналы могут быть использованы в процессорном модуле 130 в подходящем формате для осуществления численной инверсии данных, генерированных на основе сигналов, собираемых в приемных датчиках из массива датчиков 110-1, 110-2…110-(N-1), 110-N.
Процессорный модуль 130 может быть выполнен с возможностью обработки измеренных сигналов для генерирования геофизических сигналов. Схема генерирования геофизических сигналов может быть выполнена согласно различным вариантам, раскрытым здесь. Процессорный модуль 130 может применять процесс инверсии для генерирования параметров формации. Осуществление операции инверсии или операций инверсии может включать в себя использование упреждающей модели и/или библиотеки. Упреждающая модель обеспечивает группу математических зависимостей для ответных сигналов датчиков, которые могут быть применены для определения того, какой выбранный датчик будет осуществлять измерение в конкретной среде, которая может включать в себя конкретную формацию. Библиотека может содержать информацию, относящуюся к различным свойствам формации, которые могут быть коррелированы с измеренными ответными сигналами на выбранные зондовые сигналы. Осуществление операции инверсии или операций инверсии может включать в себя осуществление итерационного процесса или осуществление процесса сопоставления образов.
Процессорный модуль 130 может быть выполнен с возможностью обработки измеренных сигналов с целью генерирования геофизических сигналов. Эти геофизические сигналы могут быть основаны на чувствительности связных компонент XX или YY. Также могут генерироваться геофизические сигналы, основанные на связных компонентах XZ и ZX. Буровые операции, включая геологическое сопровождение, но не ограничиваясь им, могут осуществляться с использованием геофизических сигналов, основанных на чувствительности связных компонент XX и/или YY. Использование геофизических сигналов, основанных на чувствительности связных компонент XX и YY, может включать в себя оценку в комбинации с геофизическими сигналами, основанными на связных компонентах XZ и/или ZX. Процессорный модуль 130 может быть выполнен в виде модуля, отдельного от модуля 120 управления, или объединен с модулем 120 управления. Процессорный модуль 130 и/или модуль 120 управления могут или может быть выполнены или выполнен в виде распределенных компонент.
В различных вариантах измерительный зонд 105 с процессорным модулем 130 или комбинацией модуля 120 управления и процессорного модуля 130 может быть выполнен с возможностью определения и генерирования связных компонент XX и YY, включая чувствительность связных компонент XX и YY к разности между нулевыми сигналами обычных зондов в «мертвой зоне» и в гомогенной среде. Чувствительность связных компонент XX и YY может быть определена путем обработки с целью отделения связных компонент матрицы связи, которая ставит в соответствие сигналы, принятые приемными датчиками зонда 105, сигналам, переданным передающими датчиками зонда 105, посредством массива передающих датчиков и приемных датчиков, которые непосредственно получают отделенные связные компоненты XX и YY, или посредством массива передающих датчиков, которые получают отделенные связные компоненты XX и YY с помощью ограниченной обработки. Различные сигналы могут генерироваться согласно различным комбинациям связных компонент, которые используют чувствительность XX и YY для решения проблем «мертвой зоны». Такие комбинации могут включать в себя, не ограничиваясь ими, генерирование среднеарифметического значения, которое может включать детерминацию различия между связными компонентами XX и YY, или среднегеометрического значения, которое может включать детерминацию различия между связными компонентами XX и YY, или другие комбинации, упоминаемые здесь. Определение факта различия или величины различия может использоваться для идентификации границ между различными слоями формации.
В различных вариантах, технологии обработки в сочетании с ЭМ-зондом, оснащенным как наклонным передатчиком (передатчиками), так и наклонным приемником (приемниками), могут применяться для получения геофизических сигналов. Ответные геофизические сигналы могут использоваться для различения моделей формаций в тех случаях, когда это невозможно осуществить с помощью обычных азимутальных ЭМ-зондов. Новые технологии способны устранить проблему «мертвой зоны» и помогают петрофизикам еще лучше понять геологическую структуру формации на основе различных ответных геофизических сигналов, чувствительных к конкретным азимутальным ориентациям. Эти технологии могут удовлетворять конкретным нуждам при использовании в современных видах геологического сопровождения.
Фиг. 2 показывает антенную конфигурацию 200 для многокомпонентного электромагнитного каротажного зонда. Раскрытие такой конфигурации многокомпонентного электромагнитного каротажного зонда можно найти в международной публикации WO 2011/129828. Магнитное поле h в приемных катушках может быть выражено через магнитные моменты m в передатчиках и матрицу связи C следующим образом:

Уравнение (1) может быть представлено в виде:

где МХ, MY, и MZ представляют собой магнитные моменты передаваемого сигнала, излучаемого передатчиками TX, TY и TZ, соответственно. HX, HY, и HZ представляют собой магнитные поля, которые пропорциональны принимаемым сигналам в приемных антеннах RX, RY и RZ соответственно. Для антенной конфигурации на фиг. 2 могут быть получены девять абсолютных или дифференциальных измеренных значений, когда антенна активирована и сигнал измерен в каждом из трех приемников соответственно. Эти девять измерительных значений обеспечивают возможность определения полной матрицы связи С. Матрица связи С имеет компоненты, 

Фиг. 3 показывает зонд 305, выполненный с возможностью работы в качестве ЭМ-зонда каротажа сопротивлений в азимутальном направлении. Конфигурация зонда 305 может быть выполнена с возможностью обеспечения глубокого азимутального зондирования. В сочетании с наклонными приемниками (R1, R2 и R3) эта конфигурация зонда обеспечивает возможность азимутально-чувствительных измерений. Измерения, осуществляемые посредством зонда 305, ассоциированы со связными компонентами 

Зонд 305 содержит передатчики Т1-Т6 и наклонные приемники R1-R3 для измерения удельного сопротивления, которые могут быть выполнены с возможностью формирования матрицы азимутального удельного сопротивления путем активации различных передатчиков в комбинации с выбором подходящих наклонных приемников с целью сбора ответных сигналов в результате активации различных передатчиков. Эти передатчики, удаленные на различные расстояния от наклонных приемников, обеспечивают возможность исследования формации на различных расстояниях от зонда 305, включая относительно глубокое зондирование. Более глубинные измерительные данные, обеспечиваемые зондом 305, могут сократить время реакции, что обеспечит возможность повышения скорости бурения. Массив наклонных датчиков также предназначен для азимутальных измерений. Азимутальные измерительные данные могут использоваться для получения значений анизотропного удельного сопротивления Rh (по горизонтали) и Rv (по вертикали), и глубины. Азимутальные измерения могут быть осуществлены для нескольких бинов. Например, в качестве количества бинов может быть установлено 32. Может также быть установлено другое количество бинов.
Передатчики и приемники зонда 305 могут быть разнесены для обеспечения нескольких разделяющих расстояний. Например, верхние передатчики могут быть удалены от центральных наклонных приемников на такие же разделяющие расстояния, на которые нижние передатчики удалены от центральных наклонных приемников. Такая конфигурация обеспечивает симметричное расположение датчиков, которые могут быть сгруппированы для формирования множества подматриц. Примеры разделяющих расстояний могут включать в себя 16 дюймов (50,6 см), 32 дюйма (81, 3 см) и 48 дюймов (121, 9 см). Кроме того, могут использоваться разделяющие расстояния, не используемые в симметричной конфигурации; например там, где используются верхние и нижние передатчики с дистанционным наклонным приемником R3, могут быть обеспечены разделяющие расстояния большей величины. В дополнение, зонд 305 выполнен с возможностью работы на нескольких различных частотах. Например, зонд 305 может работать на частотах, включающих, но не ограничивающихся 2 МГц, 500 кГц и 125 кГц.
Тем не менее, имеют место проблемы с использованием ответных геофизических сигналов в нескольких моделях формаций, в частности в слоистых моделях с симметричными структурами по удельному сопротивлению. Рассмотрим трехслойную модель формации. Фиг. 4А показывает зонд на фиг. 3, забуриваемый в трехслойную модель формации вдоль профиля 407; в этой модели верхний и нижний слои имеют низкое удельное сопротивление порядка 1 Ом⋅м, а средний слой имеет высокое удельное сопротивление порядка 20 Ом⋅м. Фиг. 4В показывает соответствующую фазовую характеристику 441 ответного геофизического сигнала при детектировании с верхней стороны относительно зонда и соответствующую фазовую характеристику 442 ответного геофизического сигнала при детектировании с нижней стороны относительно зонда. Направление в верхнюю сторону (указано на фиг. 9) показывает, что лицевая поверхность зонда обращена к поверхности с азимутальным углом 0°, в то время как направление в нижнюю сторону противоположно на 180° направлению в верхнюю сторону. Как показано на фиг. 4А-4В, когда зонд расположен на глубине порядка 15 футов (4, 57 м) от земли по истинно вертикальной оси (истинно вертикальная глубина, TVD), фаза геофизического сигнала становится равной нулю, независимо от угла наклона бурения. При этих условиях петрофизики могут ошибочно принять геологическую структуру данной формации за гомогенную из-за слабых ответных геофизических сигналов.
Похожие ситуации возникают, если удельное сопротивление самого нижнего слоя изменилось до 5 Ом⋅м, как показано на фиг. 5А, при зонде на фиг. 3, забуренном в модель трехмерной формации вдоль профиля бурения 507. Фиг. 5В показывает соответствующую фазовую характеристику 541 ответного геофизического сигнала по направлению в верхнюю сторону относительно зонда и соответствующую фазовую характеристику 542 по направлению в нижнюю сторону. При глубине порядка 12 футов (3, 66 м) в истинном вертикальном направлении на фиг. 5А-5В, фаза соответствующего геофизического сигнала остается равной нулю, аналогично ответным сигналам в случае гомогенной формации. Как можно видеть на этих фигурах, в зонде на фиг. 3 независимо от значений удельного сопротивления имеет место «мертвая зона» там, где геофизический сигнал (или его эквивалент 
Как было сказано выше, ответные геофизические сигналы в ЭМ-зондах каротажа сопротивлений в азимутальном направлении, применяемых в промышленных целях в настоящее время, ассоциированы со связными компонентами 


Для того чтобы решить вышеуказанные проблемы неопределенности при геологическом сопровождении, в настоящем изобретении введены новые ответные геофизические сигналы. Как показано на фиг. 6В-6С, связная компонента ZX теряет чувствительность в середине модели формации (на практике связная компонента XZ будет аналогична ZX), и связная компонента ZZ не может быть использована для обеспечения азимутальной чувствительности. Поэтому для ответных геофизических сигналов введены две или более связных компоненты; ими являются связные компоненты XX и YY.
Фиг. 7А показывает ту же самую модель формации, что и на фиг. 6А, а на фиг. 7В-7С использованы те же самые значения частоты и расстояния между антеннами (передатчиком Т6 и приемником R1 на фиг. 3). Фиг. 7В-7С показывают ответные сигналы Н магнитного поля, ассоциированные со связными компонентами XX и YY. Кривые 741 и 743 приведены для HXX, а кривые 742 и 744 - для HYY. Теоретически, связные компоненты XX и YY в гомогенной модели формации являются идентичными. Как показано на фиг. 7В-7С, всегда имеют место промежутки между компонентами XX и YY магнитного поля, и, следовательно, эти промежутки могут быть использованы для решения вышеуказанной проблемы неопределенности. Увеличение этих промежутков по ходу следования может быть использовано для идентификации границ между слоями формации с различными удельными сопротивлениями.
Конфигурация 800 с наклонным передатчиком и наклонным приемником на фиг. 8 была раскрыта в международной публикации WO 2011/129828, где эта конфигурация 800 была выполнена с возможностью формирования компонент XX и YY в зондах для каротажа в процессе бурения (LWD). На фиг. 8 сигнал, принятый в приемнике (R) при активации передатчика (T), может быть выражен формулой (3):

где

В дополнение, в патентной публикации США 2008/0078580 были введены два вида определений (VGeo1 и VGeo2) геофизического сигнала; первый вид геофизического сигнала выражен формулой

и второй вид выражен формулой

где i - индексный номер бина роторного зонда, βi - соответствующий азимутальный угол с верхней стороны бина с индексным номером i, как показано на фиг. 9, βj - азимутальный угол бина j, противоположного азимутальному направлению бина i, и N - суммарное количество бинов на фиг. 9.
Рассмотрим конструкцию антенны 1000 на фиг. 10. С помощью симметричных антенных структур могут быть компенсированы ответные геофизические сигналы, выраженные уравнениями (4) и (5). С использованием тех же самых условий бурения, что и на фиг. 6А, на фиг. 11А и 11В соответственно показаны фазовая характеристика и характеристика затухания компенсированного геофизического сигнала первого вила, VGeo1, для четырех различных азимутальных углов зонда (0°, 90°, 180° и 270°). Кривая 1141 соответствует азимутальному углу 0°. Кривая 1142 соответствует азимутальному углу 90°. Кривая 1143 соответствует азимутальному углу 180°. Кривая 1144 соответствует азимутальному углу 270°. Кривая 1146 соответствует азимутальному углу 0°. Кривая 1147 соответствует азимутальному углу 90°. Кривая 1148 соответствует азимутальному углу 180°. Кривая 1149 соответствует азимутальному углу 270°. С использованием тех же условий бурения, что и на фиг. 6А, на фиг. 12А и 12В соответственно показан второй вид геофизического сигнала, VGeo2, т.е. фазовая характеристика и характеристика затухания компенсированного ответного геофизического сигнала при четырех различных азимутальных углах зонда (0°, 90°, 180° и 270°). Кривая 1241 соответствует азимутальному углу 0°. Кривая 1242 соответствует азимутальному углу 90°. Кривая 1243 соответствует азимутальному углу 180°. Кривая 1244 соответствует азимутальному углу 270°. Кривая 1246 соответствует азимутальному углу 0°. Кривая 1247 соответствует азимутальному углу 90°. Кривая 1248 соответствует азимутальному углу 180°. Кривая 1249 соответствует азимутальному углу 270° Как показано на фиг. 11А-11В, первый вид геофизического сигнала никогда не достигает нуля, даже если зонд расположен в середине модели формации. С другой стороны, второй вид ответного геофизического сигнала аналогичен тем, которые имеют место в ЭМ-зонде каротажа сопротивлений в азимутальном направлении, где в подобных симметричных моделях формаций обнаруживаются неопределенности.
Следовательно, комбинация обоих видов ответных геофизических сигналов может быть использована для взаимного различения гомогенной модели формации и негомогенной слоистой модели формации с симметричными профилями удельного сопротивления. Фактически, фиг. 13А-13В показывают фазовую диаграмму геофизического сигнала и диаграмму затухания геофизического сигнала первого вида при различных азимутальных углах зонда, соответствующих сигналам на фиг. 11А и фиг. 11В соответственно, в модели формации на фиг. 6А. Фиг. 14А-14В показывают фазовую диаграмму геофизического сигнала и диаграмму затухания геофизического сигнала второго вида при различных азимутальных углах зонда, соответствующих сигналам на фиг. 12А и 12В соответственно в модели формации на фиг. 6А. С использованием таких диаграмм геофизических сигналов петрофизики могут интерпретировать геологическую структуру формации без проблем, связанных с неопределенностью.
Когда ЭМ-зонд находится в середине симметричной слоистой формации (или других формаций), разность между компонентами XX и YY может устранить мертвую зону. Следовательно, использование такой разности между компонентами XX и YY обеспечивает механизм отличения всех вышеописанных слоистых моделей формаций от гомогенной модели формации. В конфигурации зонда на фиг. 10 передатчики перпендикулярны приемникам, и все антенны наклонены на 45°. Для такой конфигурации сигнал напряжения, измеренный в приемнике в качестве ответа на активацию передатчика, может быть представлен, на основе уравнения (3), в виде:

Таким образом, уравнение 4, использующее уравнение (6), может быть представлено в виде:

и уравнение (5) может быть представлено в виде:

Как показано в уравнениях (7) и (8), для различных азимутальных углов βi при различных бинах i, VGeo1 включает в себя как разность между XX и YY, так и разность между XZ и YZ, благодаря чему обеспечивается возможность обнаружения неопределенности, связанной с мертвой зоной при использовании обычных технологий. Тем не менее, только геофизический сигнал VGeo2 показывает разность между XZ и YZ, что аналогично обычным промышленным ЭМ-зондам для азимутального направления, которые используют компоненты ZX.
С другой стороны, для конфигурации зонда на фиг. 10 процессорный модуль может осуществлять разделение  и
и  посредством применения эмпирической функции и/или преобразования Фурье к уравнению (3). Затем может быть вычислен и сгенерирован ответный геофизический сигнал третьего вида по формуле
посредством применения эмпирической функции и/или преобразования Фурье к уравнению (3). Затем может быть вычислен и сгенерирован ответный геофизический сигнал третьего вида по формуле

и ответный геофизический сигнал четвертого вида по формуле

Геофизический сигнал VGео3 может использоваться для решения проблемы неопределенности, а сгенерированный геофизический сигнал VGeo4 аналогичен ответным геофизическим сигналам в обычных промышленных зондах. Новые геофизические сигналы могут генерироваться для идентификации разности компонент XX и YY и устранения неопределенностей из-за мертвой зоны.
В дополнение к использованию значения разности между связными компонентами XX и YY, могут также быть определены другие ответные геофизические сигналы с помощью, но не ограничиваясь ею, величины соотношения между связными компонентами XX и YY или величины корня квадратного из связных компонент XX и YY. Могут также использоваться другие алгебраические функции XX и YY. Такие значения могут быть вычислены на основе сигналов магнитного поля и/или комплексных сигналов напряжения. Использование корня квадратного может быть обеспечено многокомпонентными зондами, например, с конфигурацией на фиг. 2. Путем сбора всех связных компонент могут быть сгенерированы и смоделированы ответные геофизические сигналы, использующие комбинации связных компонент, которые включают в себя связные компоненты XX и YY, для определения различий между нулевыми сигналами, связанными с обычными зондами, в «мертвой зоне» и в гомогенной среде. Например, конфигурации зонда на фиг. 15С и 15D могут использоваться для отделения всех связных компонент. Асимметричные конфигурации зондов могут использоваться в сочетании с технологией отклонения по глубине для обеспечения такого отделения. Наряду с отделенными компонентами могут генерироваться различные ответные геофизические сигналы в качестве функций комбинаций связных компонент, относящихся, но без ограничения, к (XX-YY)/(XX+YY+2ZZ), (XX-YY)/(XX+YY-2ZZ), XX/ZZ и YY/ZZ, (XX-YY)/ZZ и (XX+YY)/ZZ, XX/(XX+YY+2ZZ) и YY/(XX+YY+2ZZ), или XX/(XX+YY-2ZZ) и YY/(XX+YY-2ZZ), что обеспечивает возможность решения проблемы неопределенности. Путем анализа и использования связных компонент XX и YY могут быть решены проблемы неопределенности в обычных сферах применения геологического сопровождения.
Вышеуказанные варианты ответных геофизических сигналов могут быть получены с использованием различных конфигураций, как с наклонным передатчиком (передатчиками), так и с наклонным приемником (приемниками). В дополнение, можно использовать по меньшей мере один наклонный передатчик и по меньшей мере один наклонный приемник для получения ответных геофизических сигналов, упоминаемых здесь. Несколько возможных конфигураций, показанных на фиг. 15A-15D, обеспечивают возможность получения компенсированных сигналов, причем компенсация может быть обеспечена между данными того же самого бина или противоположного бина, связанными с результатами верхнего и нижнего азимутального измерения. Например, такими данными являются верхние усредненные данные из T1-R и нижние усредненные данные из T2-R в конфигурации на фиг. 15А. Ввиду взаимозаменяемости антенн передатчик и приемник на фиг. 15A-15D являются взаимозаменяемыми.
Фиг. 16 показывает отличительные особенности варианта иллюстративного способа осуществления операций, связанных с бурением, с использованием геофизического сигнала. На шаге 1610 производят сбор сигналов, причем эти сигналы генерируются или уже были сгенерированы в результате работы зонда в скважине. Зонд, имеющий продольную ось, может содержать один или более передающих датчиков, наклоненных к продольной оси, и один или более приемных датчиков, наклоненных к продольной оси. Собранные сигналы могут включать в себя сигналы, принятые одним или более наклонными приемными датчиками в ответ на активацию одного или более наклонных передающих датчиков. Активация передающих датчиков может включать в себя управление активацией, при котором передающие датчики активируются раздельно. Сбор сигналов может включать в себя сбор сигналов в каждом приемном датчике отдельно от раздельно активируемых передающих датчиков. Сбор сигналов может включать в себя сбор компенсированных сигналов. Сбор сигналов может также включать в себя сбор сигналов напряжения, генерируемых в результате работы зонда, имеющего симметричную компоновку из одного или более наклонных передающих датчиков и одного или более наклонных приемных датчиков. Сбор сигналов может включать в себя сбор сигналов напряжения, генерируемых в результате работы зонда с селективной активацией передающих датчиков, выбранных из одного или более наклонных передающих датчиков, и селективным сбором сигналов из наклонных приемных датчиков, выбранных из одного или более наклонных приемных датчиков, таким образом, что эти выбранные передающие датчики и выбранные наклонные приемные датчики располагаются симметрично относительно продольной оси. Один или более передающих датчиков и один или более приемных датчиков могут представлять собой, но не ограничиваясь ими, антенны, наклоненные по углом 45° к продольной оси или с отклонением в пределах 1 или 2 градусов от 45°, так что угол наклона может составлять приблизительно 45° к продольной оси. Сбор сигналов может включать в себя сбор сигналов напряжения в зависимости от ориентации зонда; эта ориентация зонда включает в себя множество направлений, общее количество которых соответствует одному полному обороту, разделенному на N бинов, каждый из которых соответствует углу поворота, равному 2π/N, где N - целое число, равное или большее единицы. Сбор сигналов может включать в себя сбор сигналов напряжения, генерируемых в результате работы зонда, приводимого во вращение в скважине. Сбор сигналов, генерируемых в результате работы зонда, может включать в себя использование зонда, имеющего массив из одного или более передающих датчиков, наклоненных по существу к продольной оси зонда, и одного или более приемных датчиков, наклоненных по существу к продольной оси, так что собираемые сигналы обеспечивают отделение от них связных компонент.
На шаге 1620 обрабатывают собранные сигналы в процессорном модуле и генерируют геофизический сигнал, содержащий представление для определения разности между связной компонентой XX и связной компонентой YY. Разность между связной компонентой XX и связной компонентой YY может использоваться для устранения неопределенностей, имеющих место при нахождении обычных зондов в слоистых формациях. Обработка собранных сигналов может включать в себя отделение связных компонент от собранных сигналов и использование отделенных компонент для генерирования геофизического сигнала. Генерирование геофизического сигнала может включать в себя определение геофизического сигнала на основе разности между связными компонентами XX и YY, соотношения между связными компонентами XX и YY или корня квадратного из связных компонент XX и YY. Генерирование геофизического сигнала может включать в себя определение геофизического сигнала на основе комбинации связных компонент, соответствующей взаимосвязи связных компонент, включая (XX-YY)/(XX+YY+2ZZ), (XX-YY)/(XX+YY-2ZZ), XX/ZZ и YY/ZZ, (XX-YY)/ZZ и (XX+YY)/ZZ, XX/(XX+YY+2ZZ) и YY/(XX+YY+2ZZ), или XX/(XX+YY-2ZZ) и YY/(XX+YY-2ZZ). Геофизический сигнал может быть сгенерирован на основе собранных компенсированных сигналов. Генерирование геофизического сигнала на основе собранных сигналов включает в себя генерирование характеристик фазы геофизического сигнала и затухания геофизического сигнала. Обработка собранных сигналов может включать в себя вычисление связных компонент для матрицы связи с использованием собранных сигналов и осуществление одной или более операций инверсии для генерирования параметров формации на основе этой матрицы связи.
На шаге 1630 осуществляют операции, связанные с бурением, с использованием геофизического сигнала. Эти операции, связанные с бурением, могут включать в себя геологическое сопровождение операции бурения на основе геофизического сигнала. Данные операции, связанные с бурением, могут также включать в себя осуществление анализа структуры формации с использованием генерируемых геофизических сигналов.
В различных вариантах машиночитаемое устройство для хранения может содержать сохраненные в нем команды, которые, при их выполнении компьютером инициируют осуществление им операций, имеющих одну или более отличительных особенностей, аналогичных или идентичных отличительным особенностям способов или технологий, раскрытых здесь. В различных вариантах система может содержать зонд, имеющий продольную ось и содержащий один или более приемных датчиков, наклоненных к продольной оси; и процессорный модуль для генерирования геофизического сигнала на основе связной компоненты XX, связной компоненты YY или комбинации связной компоненты XX и связной компоненты YY, при этом зонд и процессорный модуль выполнены с возможностью работы в соответствии с одной или более отличительными особенностями, аналогичными или идентичными отличительным особенностям способов или технологий, раскрытых здесь.
В настоящее время промышленные зонды для геологического сопровождения бурения могут быть неспособны к выполнению любых полезных измерений, когда они находятся вблизи центра резервуара. Например, при геологическом сопровождении, использующем обычный ЭМ-зонд для азимутального направления, этот зонд становится «слепым» к смежным границам, когда он находится вблизи центра слоя. Следовательно, управление ориентированием с помощью такого зонда становится невозможным при данных условиях. В настоящем изобретении варианты методик, основанных на геофизическом сигнале, обеспечивают возможность решения этой и аналогчных проблем, связанных с неопределенностью. Эти ответные геофизические сигналы, при их использовании в сочетании с известными ответными геофизическими сигналами, могут помочь петрофизикам в более точном определении геологической структуры формации и в более надежном ориентировании зонда в реальном времени. Повышенная надежность геологического сопровождения может быть достигнута с использованием вариантов ответных геофизических сигналов, аналогичных или идентичных ответным геофизическим сигналам, раскрываемым здесь, что возможно лишь тогда, когда и передатчик, и приемник являются наклонными.
Фиг. 17 показывает в виде блок-схемы отличительные особенности иллюстративной системы 1700, выполненной с возможностью осуществления операций, связанных с бурением, с использованием геофизического сигнала. Система 1700 содержит зонд 1705, имеющий передающую антенну (антенны) 1710-1 и приемную антенну (антенны) 1710-2, выполненные с возможностью работы в скважине. Размещение передающей антенны (антенн) 1710-1 и приемной антенны (антенн) 1710-2 зонда 1705 может быть выполнено аналогично или идентично размещению, раскрытому здесь. Система 1700 может также содержать контроллер 1720, запоминающее устройство 1740, электронное устройство 1750 и модуль связи 1735. Контроллер 1720 и запоминающее устройство 1740 могут быть выполнены с возможностью управления зондом 1705 с целью сбора измерительных данных во время работы зонда 1705 и с целью назначения собранных данных множеству бинов, каждый из которых коррелирован с азимутальным углом при вращении зонда 1705. Контроллер 1720 и запоминающее устройство 1740 могут быть выполнены с возможностью управления активацией выбранных передающих антенн 1710-1 и сбором данных посредством выбранных приемных антенн 1710-2 в зонде 1705, а также для управления обрабатывающими схемами с целью определения геофизического сигнала в соответствии с измерительными процедурами и обработкой сигнала, как было раскрыто здесь. Процессорный модуль 1720 может быть выполнен с возможностью осуществления операций управления обрабатывающими схемами для определения геофизического сигнала в соответствии с измерительными процедурами и обработкой сигналов способом, аналогичным или идентичным вариантам, раскрытым здесь.
Электронное устройство 1750 может использоваться совместно с контроллером 1720 для выполнения задач, связанных с проведением скважинных измерений с помощью передающей антенны (антенн) 1710-1 и приемной антенны (антенн) 1710-2 зонда 1705. Модуль связи 1735 может содержать внутрискважинные коммуникации для осуществления связи во время операции бурения. Эти внутрискважинные коммуникации могут включать в себя телеметрическую систему.
Система 1700 может также содержать шину 1747, которая обеспечивает электрическое соединение между компонентами системы 1700. Шина 1747 может содержать адресную шину, шину данных и шину управления, каждая из которых является независимой. Шина 1747 может также использовать общие линии связи для передачи одного или более адресов, данных или команд управления; использование этой шины регулируется посредством контроллера 1720. Шина 1747 может быть выполнена таким образом, чтобы компоненты системы 1700 были распределенными. Такое распределение может быть осуществлено между скважинными компонентами, такими как передающая антенна (антенны) 1710-1 и приемная антенна (антенны) 1710-2 зонда 1705, и компонентами, которые могут быть размещены на поверхности над скважиной. В другом варианте указанные компоненты могут быть совместно размещены, например, на одной или более утяжеленных бурильных трубах колонны бурильных труб или на проводной структуре.
В различных вариантах периферийные устройства 1760 могут включать в себя дисплеи, дополнительное устройство для хранения и/или другие устройства управления, которые могут функционировать совместно с контроллером 1720 и/или с запоминающим устройством 1740. В одном из вариантов контроллер 1720 может быть выполнен в виде одного или более процессоров. Периферийные устройства 1760 могут быть оснащены дисплеем и командами, хранящимися в памяти 1740, с целью реализации интерфейса пользователя для управления работой зонда 1705 и/или компонент, распределенных внутри системы 1700. Такой интерфейс пользователя может работать совместно с модулем связи 1735 и шиной 1747. Различные компоненты системы 1700 могут быть объединены с зондом 1705 таким образом, чтобы обработка, идентичная или аналогичная той, которая осуществляется раскрытыми здесь схемами обработки применительно к различным вариантам, могла осуществляться в скважине вблизи места измерения или на поверхности.
Фиг. 18 показывает вариант системы 1800 на месте бурения, причем эта система 1800 содержит устройство, выполненное с возможностью осуществления операций, связанных с бурением, в соответствии с геофизическим сигналом. Система 1800 может содержать зонд 1805-1 или 1805-2 или оба зонда 1805-1 и 1805-2, имеющих передающие антенны и приемные антенны, выполненные с возможностью осуществления измерений, которые могут использоваться для ряда буровых применений, включая, но не ограничиваясь им, определение геофизических сигналов. Зонды 1805-1 и 1805-2 могут быть выполнены идентично или аналогично зондовой архитектуре или комбинациям зондовых архитектур, раскрытых здесь, включая модули управления и процессорные модули, выполненные с возможностью осуществления обработки в процессорных схемах способом, идентичным или аналогичным раскрытым здесь технологиям обработки для определения геофизических сигналов. Зонд 1805-1 или 1805-2 или оба зонда 1805-1 и 1805-2 могут быть распределены по компонентам системы 1800. Зонды 1805-1 и 1805-2 могут быть выполнены аналогичным или идентичным образом с точки зрения размещения модулей управления, передатчиков, приемников и процессорных модулей, раскрытых здесь. Зонды 1805-1 и 1805-2 могут быть спроектированы, изготовлены и откалиброваны в соответствии с различными вариантами, упомянутыми здесь.
Система 1800 может содержать буровую вышку 1802, размещенную на поверхности 1804 над скважиной 1806, и бурильные трубы, которые, будучи соединены друг с другом, образуют бурильную колонну 1829, опущенную через роторный стол 1807 в скважинный ствол или скважину 1812-1. Буровая вышка 1802 может обеспечивать поддержку для бурильной колонны 1829. Бурильная колонна 1829 выполнена с возможностью прохождения через роторный стол 1807 для бурения скважины 1812-1 через подповерхностные формации 1814. Бурильная колонна 1829 может содержать бурильную трубу 1818 и оборудование 1820 низа бурильной колонны, расположенное в нижней части бурильной трубы 1818.
Оборудование 1820 низа бурильной колонны может содержать утяжеленную бурильную трубу 1816 и буровое долото 1826. Буровое долото 1826 выполнено с возможностью формирования скважины 1812-1 путем проникновения через поверхность 1804 и подповерхностные формации 1814. Оборудование 1820 низа бурильной колонны может содержать зонд 1805-1, прикрепленный к утяжеленной бурильной трубе 1816 для осуществления измерений с целью определения параметров формаций. Зонд 1805-1 может быть выполнен для применения в качестве MWD-системы (системы измерений в процессе бурения), в частности LWD-системы (системы каротажа в процессе бурения). Корпус, в котором размещен зонд 1805-1, может содержать электронные компоненты для инициирования измерений с помощью выбранных передающих антенн и для сбора измерительных сигналов от выбранных приемных антенн. Такие электронные компоненты могут включать в себя процессорный модуль для обеспечения анализа параметров формаций и геофизических сигналов, поступающих по стандартному механизму связи для работы в скважине. В другом варианте электронные компоненты могут включать в себя интерфейс связи для передачи измерительных сигналов, собранных с помощью зонда 1805-1, на поверхность через стандартный механизм связи для работы в скважине, причем эти измерительные сигналы могут анализироваться в процессорном модуле на поверхности с целью обеспечения анализа параметров формации и определения геофизических сигналов.
Во время проведения буровых операций бурильная колонна 1829 может приводиться во вращение посредством роторного стола 1807. Дополнительно или в другом варианте, оборудование 1820 низа бурильной колонны может также приводиться во вращение посредством двигателя (например, гидравлического забойного двигателя), который размещен в скважине. Утяжеленные бурильные трубы 1816 могут использоваться для утяжеления бурового долота 1826. Утяжеленные бурильные трубы 1816 могут также укреплять оборудование 1820 низа бурильной колонны, обеспечивая возможность для оборудования 1820 передавать дополнительную массу на буровое долото 1826 и таким образом способствовать проникновению бурового долота 1826 через поверхность 1804 и подповерхностные формации 1814.
Во время буровых операций гидравлический забойный двигатель 1832 может закачивать буровой раствор (иногда именуемый специалистами в данной области техники «буровым шламом») из резервуара 1834 бурового раствора по шлангу 1836 в бурильную трубу 1818 и далее вниз на буровое долото 1826. Буровой раствор может вытекать из бурового долота 1826 и возвращаться на поверхность 1804 через кольцевую область 1840 между бурильной трубой 1818 и стенками скважины 1812-1. Буровой раствор может затем быть возвращен в резервуар 1834, где этот буровой раствор фильтруется. В некоторых вариантах буровой раствор может использоваться для охлаждения бурового долота 1826, а также для обеспечения смазки бурового долота 1826 в процессе выполнения буровых операций. Дополнительно, буровой раствор может использоваться для удаления выбуренной породы подповерхностных формаций, образующейся в результате работы бурового долота 1826.
В различных вариантах зонд 1805-2 может быть установлен в корпусе 1870 зонда, соединенном с каротажным кабелем 1874, например, для кабельного применения. Корпус 1870 зонда, содержащий зонд 1805-2, может содержать электронные элементы для инициирования измерений с помощью выбранных передающих антенн и для сбора измерительных сигналов от выбранных приемных антенн. Такие электронные элементы могут включать в себя процессорный модуль для обеспечения анализа параметров формаций и определения геофизических сигналов, передаваемых по стандартному механизму связи для работы в скважине. В другом варианте электронные элементы могут включать в себя интерфейс связи для обеспечения передачи измерительных сигналов, собранных с помощью зонда 1805-2, на поверхность по стандартному механизму связи для работы в скважине, причем эти измерительные сигналы могут анализироваться в процессорном модуле на поверхности для обеспечения анализа параметров формаций, включая оценку истинного удельного сопротивления для каждого слоя исследуемой формации. Каротажный кабель 1874 может быть выполнен в виде многожильного кабеля (с множеством проводов питания и связи), одножильного кабеля (с одним проводом) и/или стального троса (без проводов для питания и связи) или другой подходящей структуры для использования в скважине 1812. Хотя фиг. 18 показывает как компоновку для кабельного применения, так и компоновку для LWD-применения (каротажа в процессе бурения), система 1800 может быть также выполнена для одной или двух сфер применения.
В различных вариантах измерительный зонд и процессорный модуль могут быть выполнены с возможностью определения и генерирования связных компонент XX и YY, включая чувствительность обеих связных компонент XX и YY к разности между нулевыми сигналами, относящимися к обычным зондам, в «мертвой зоне» и в гомогенной среде. Чувствительность связных компонент XX и YY может быть определена путем обработки по отделению связных компонент матрицы связи, посредством массива передающих датчиков и приемных датчиков, которые непосредственно формируют отделенные связные компоненты XX и YY, и посредством массива передающих датчиков и приемных датчиков, которые формируют отделенные связные компоненты XX и YY с помощью ограниченной обработки. Различные геофизические сигналы могут генерироваться в соответствии с различными комбинациями связных компонент, при этом чувствительность XX и YY используется для решения проблем «мертвой зоны».
Хотя здесь были проиллюстрированы и раскрыты конкретные варианты, для специалистов с обычной квалификацией в данной области техники очевидно, что вместо раскрытых конкретных вариантов могут использоваться любые другие варианты, направленные на достижение той же самой цели. Возможны различные варианты, использующие перестановки и/или комбинации вариантов, раскрытых здесь. Следует понимать, что приведенное выше раскрытие предназначено для иллюстративных целей и не является ограничительным, и что используемая здесь фразеология и терминология предназначена для целей раскрытия. Комбинации вышеуказанных и иных вариантов станут очевидны для специалистов в данной области техники после изучения раскрытия, приведенного выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПОЛУЧЕНИЯ КОМПЕНСИРОВАННЫХ СИГНАЛОВ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТА | 2012 |
|
RU2638961C2 |
| ПРИБОР И СПОСОБ КАРОТАЖА СКВАЖИНЫ ПОСРЕДСТВОМ РАДИОЛОКАТОРА МНОГОКОМПОНЕНТНЫХ СИГНАЛОВ | 2011 |
|
RU2596909C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СОВМЕЩЕНИЯ СКВАЖИННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2634958C1 |
| УСТАНОВКА И СИСТЕМА ДЛЯ ГЕОЛОГИЧЕСКОГО СОПРОВОЖДЕНИЯ БУРЕНИЯ СКВАЖИНЫ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК КОЛЛЕКТОРА | 2008 |
|
RU2502094C2 |
| ОПРЕДЕЛЕНИЕ ИСТИННОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ ПЛАСТА | 2013 |
|
RU2663686C2 |
| УСТРОЙСТВО И СПОСОБ ПОСАДКИ СКВАЖИНЫ В ЦЕЛЕВОЙ ЗОНЕ | 2011 |
|
RU2571457C1 |
| МОДУЛЬНЫЙ ПРИБОРНЫЙ УЗЕЛ ДЛЯ ГЕОУПРАВЛЕНИЯ | 2007 |
|
RU2394270C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ БЕЗ ИСТОЧНИКА, СПОСОБЫ И СИСТЕМЫ | 2012 |
|
RU2608636C1 |
| ГЛУБИННЫЕ ЭЛЕКТРОМАГНИТНЫЕ ИЗМЕРЕНИЯ С ИСПОЛЬЗОВАНИЕМ СКРЕЩЕННЫХ МАГНИТНЫХ ДИПОЛЕЙ | 2005 |
|
RU2377608C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗОНД | 2006 |
|
RU2438150C2 |












Изобретение относится к области добычи нефти и газа. Способ бурения скважины, в котором: осуществляют сбор сигналов, генерируемых в результате работы зонда в скважине; осуществляют обработку собранных сигналов в процессорном модуле; генерируют геофизический сигнал, содержащий представление для определения разности между связной составляющей XX и связной составляющей YY; и управляют операцией, связанной с бурением, в соответствии с этим геофизическим сигналом. Технический результат заключается в повышении чувствительности в условиях слоистой формации. 3 н. и 13 з.п. ф-лы, 18 ил.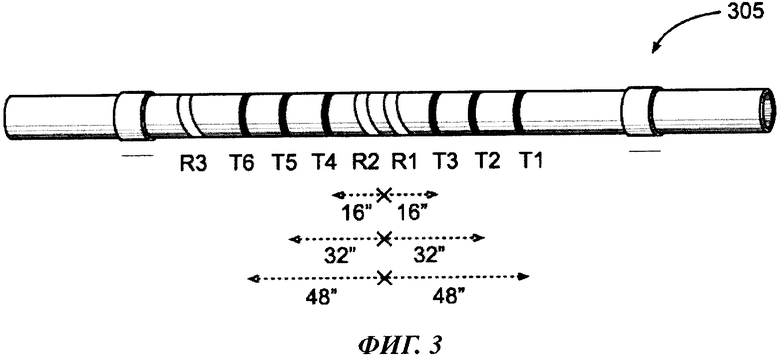
1. Способ бурения скважины, в котором:
осуществляют сбор сигналов, генерируемых в результате работы зонда в скважине;
осуществляют обработку собранных сигналов в процессорном модуле;
генерируют геофизический сигнал, содержащий представление для определения разности между связной составляющей XX и связной составляющей YY; и управляют операцией, связанной с бурением, в соответствии с этим геофизическим сигналом.
2. Способ по п. 1, в котором обработка собранных сигналов включает в себя отделение связных компонент от собранных сигналов и использование отделенных связных компонент для генерирования геофизического сигнала.
3. Способ по п. 1, в котором сбор сигналов, генерируемых в результате работы зонда, включает в себя использование зонда, имеющего один или более передающих датчиков, наклоненных по существу к продольной оси зонда, и один или более приемных датчиков, наклоненных по существу к продольной оси зонда, так что обеспечивается возможность отделения связных компонент от собранных сигналов.
4. Способ по п. 1, в котором генерирование геофизического сигнала включает в себя определение геофизического сигнала на основе разности между связными компонентами XX и YY, соотношения между связными компонентами XX и YY или корня квадратного из связных компонент XX и YY.
5. Способ по п. 1, в котором генерирование геофизического сигнала включает в себя определение геофизического сигнала на основе комбинации связных компонент, относящихся к (XX-YY)/(XX+YY+2ZZ), (XX-YY)/(XX+YY-2ZZ), XX/ZZ и YY/ZZ, (XX-YY)/ZZ и (XX+YY)/ZZ, XX/(XX+YY+2ZZ) и YY/(XX+YY+2ZZ), или XX/(XX+YY-2ZZ) и YY/(XX+YY-2ZZ).
6. Способ по п. 1, в котором сбор сигналов включает в себя сбор компенсированных сигналов, и геофизические сигналы генерируют на основе этих компенсированных сигналов.
7. Способ по п. 1, в котором сбор сигналов, генерируемых в результате работы зонда, включает в себя использование зонда, имеющего один или более передающих датчиков, наклоненных по существу к продольной оси зонда, и один или более приемных датчиков, наклоненных по существу к продольной оси зонда, а собранные сигналы включают в себя сигналы, принятые одним или более наклонными приемными датчиками в ответ на генерирование передаваемых сигналов от одного или более наклонных передающих датчиков.
8. Способ по п. 7, в котором сбор сигналов включает в себя сбор сигналов напряжения, генерируемых в результате работы зонда для выборочной активации передающих датчиков, выбранных из одного или более наклонных передающих датчиков, и для выборочного сбора сигналов от приемных датчиков, выбранных из одного или более наклонных приемных датчиков, так что выбранные наклонные передающие датчики и выбранные наклонные приемные датчики скомпонованы симметрично относительно продольной оси.
9. Способ по п. 7, в котором один или более передающих датчиков и один или более приемных датчиков представляют собой антенны, имеющие угол наклона 45° или угол наклона, отличающийся в пределах одного или двух градусов от 45°, относительно продольной оси.
10. Способ по п. 1, в котором обработка собранных сигналов включает в себя: вычисление связных компонент для матрицы связи с использованием собранных сигналов и
осуществление одной или более операций инверсии для генерирования параметров формации на основе этой матрицы связи.
11. Способ по п. 1, в котором сбор сигналов включает в себя сбор сигналов напряжения в зависимости от ориентации зонда; причем ориентация зонда включает в себя множество направлений, суммарное количество которых соответствует одному полному обороту, разделенному на N бинов, каждый из которых связан с углом поворота, равным 2π/N, где N - целое число, равное или большее единицы.
12. Способ по п. 1, в котором сбор сигналов включает в себя сбор сигналов напряжения, генерируемых в результате работы зонда, вращающегося в скважине.
13. Способ по п. 1, который включает в себя геологическое сопровождение операции бурения на основе геофизического сигнала.
14. Способ по п. 1, в котором определение геофизического сигнала на основе собранных сигналов включает в себя генерирование характеристики фазы геофизического сигнала и характеристики затухания геофизического сигнала.
15. Машиночитаемое устройство для хранения, содержащее сохраненные в нем команды, которые при их выполнении компьютером инициируют осуществление этим компьютером операций, в том числе способом по любому из пп. 1-14.
16. Система для бурения скважины, содержащая:
зонд, имеющий один или более передающих датчиков и один или более приемных датчиков; и
процессорный модуль для генерирования геофизического сигнала, содержащего представление для определения разности между связной компонентой XX и связной компонентой YY, причем зонд и процессорный модуль выполнены с возможностью работы согласно любому из пп. 1-14.
| US 2011140701 A1, 16.06.2011 | |||
| US 2012199394 A1, 09.08.2012 | |||
| US 2012253676 A1, 04.10.2012 | |||
| US 2012283951 A1, 08.11.2012. |

