Область техники
Настоящее изобретение относится в общем к устройству для выполнения измерений, относящихся к разведке нефти и газа.
Предпосылки изобретения
В бурении скважин для разведки нефти и газа понимание структуры и свойств соответствующего геологического пласта дает информацию, помогающую такой разведке. Оптимальное размещение скважины в нефтегазоносной зоне ("продуктивной зоне") обычно требует геонавигации по траекториям наклонно-направленных или горизонтальных скважин, поскольку большинство продуктивных зон простираются в горизонтальной плоскости. Геонавигация является принудительным управлением для корректировки направления бурения. Существующий подход на основе геонавигации в системе размещения скважин включает в себя пересечение и определение местоположения продуктивной зоны, за которыми следует перемещение бурильной колонны на более высокую отметку и начало бурения нового бокового ствола, который подходит к целевой зоне сверху. Данный первый подход является затратным по времени, где бурение требуется останавливать и спускать устройство для зарезки бокового ствола в скважину. Другой существующий подход на основе геонавигации в системе размещения скважин включает в себя пересечение и определение местоположения продуктивной зоны, за которыми следует продолжение бурения для подхода скважиной снизу. Данный второй подход может давать в результате отклонение траектории скважины от заданной целевой зоны и может только являться эффективным, если скважина является наклонно-направленной c большим отходом на точке пересечения.
Краткое описание чертежей
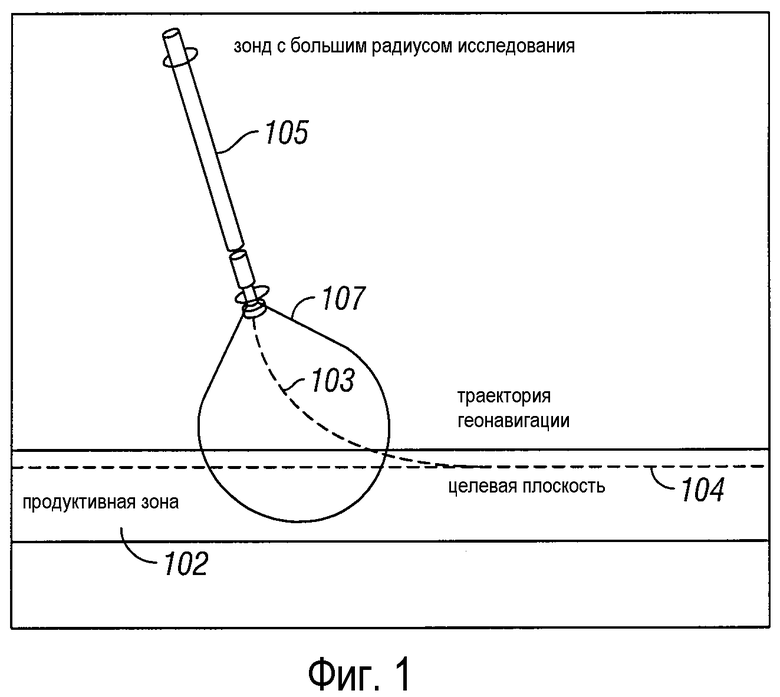
На фиг. 1 показана геонавигация с зондом с большим радиусом исследования согласно различным вариантам осуществления.
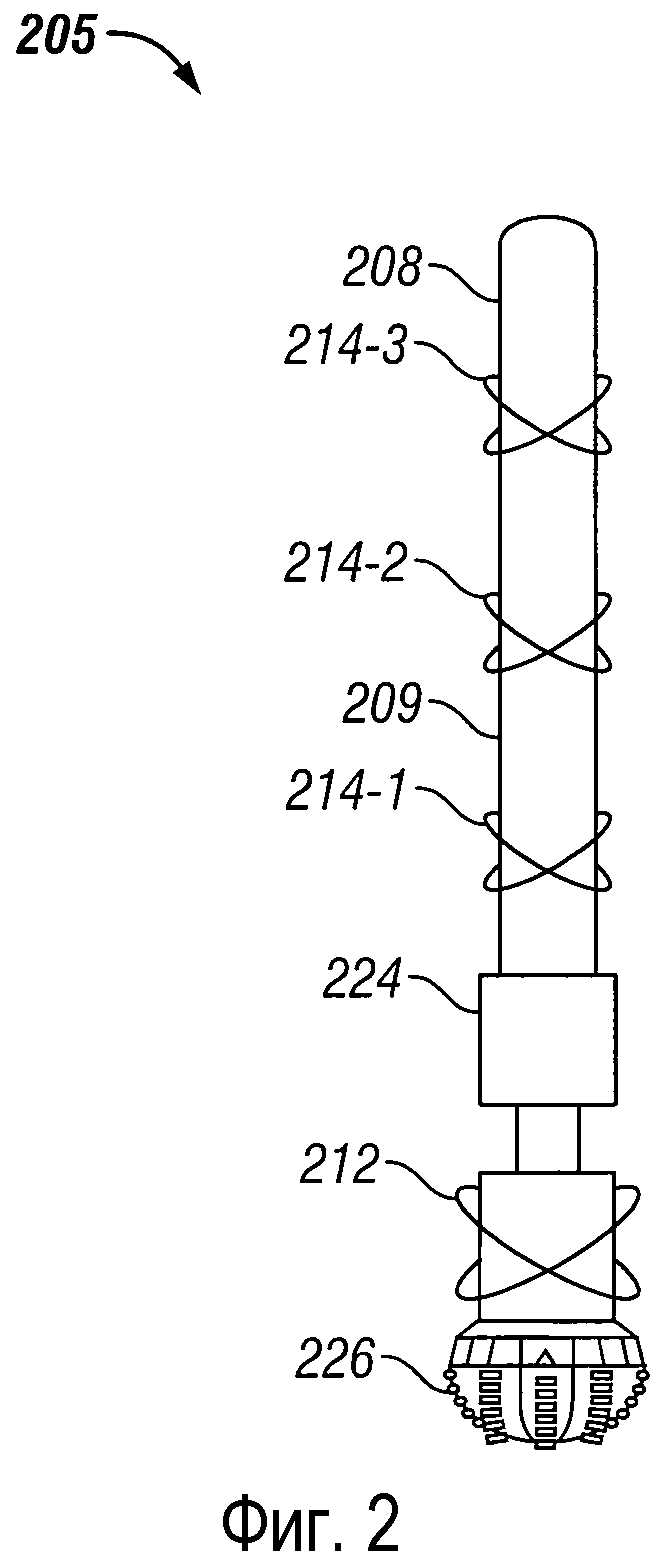
На фиг. 2 показан пример системы зонда в варианте электромагнитного зонда с большим радиусом исследования, согласно различным вариантам осуществления.
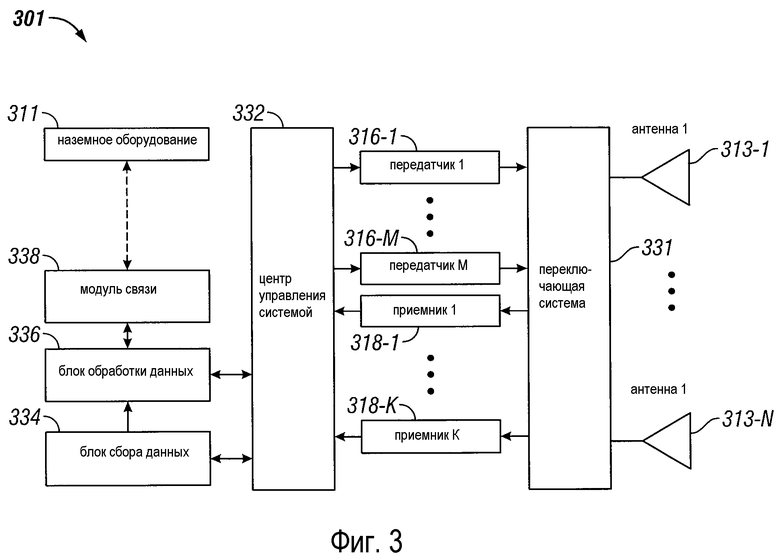
На фиг. 3 показана блок-схема примера электронной аппаратуры зонда с большим радиусом исследования согласно различным вариантам осуществления.
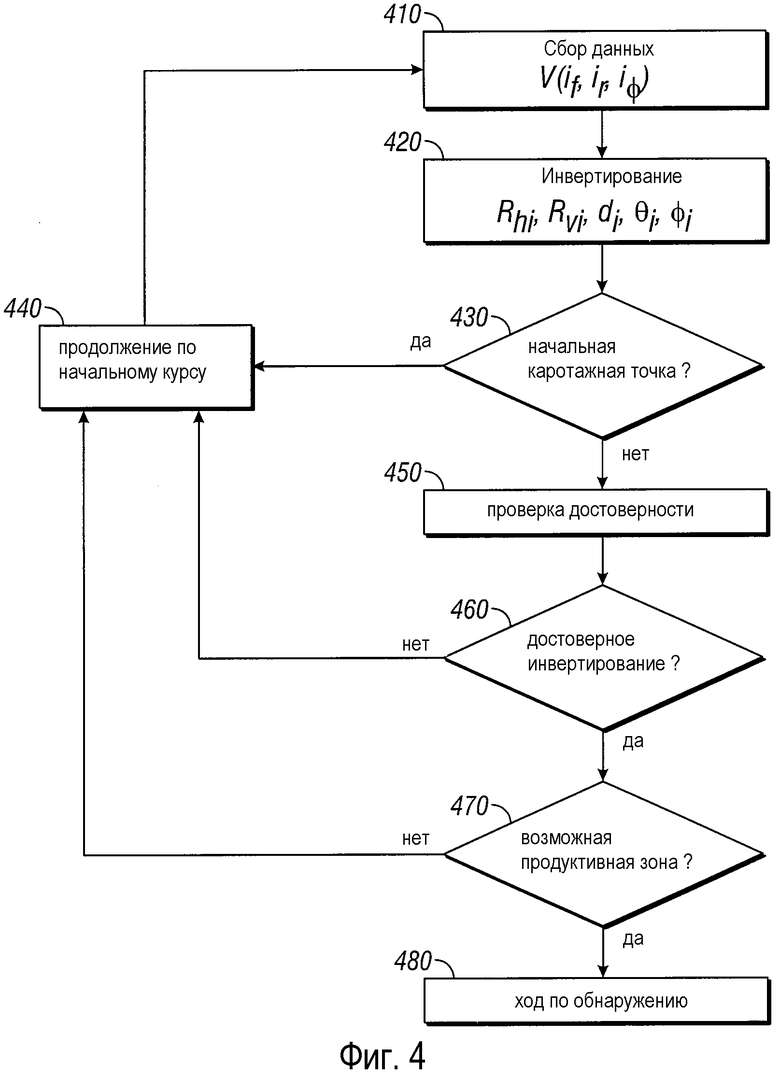
На фиг. 4 показаны элементы примера способа выполнения операций зонда, согласованных с бурением, до обнаружения целевой зоны согласно различным вариантам осуществления.
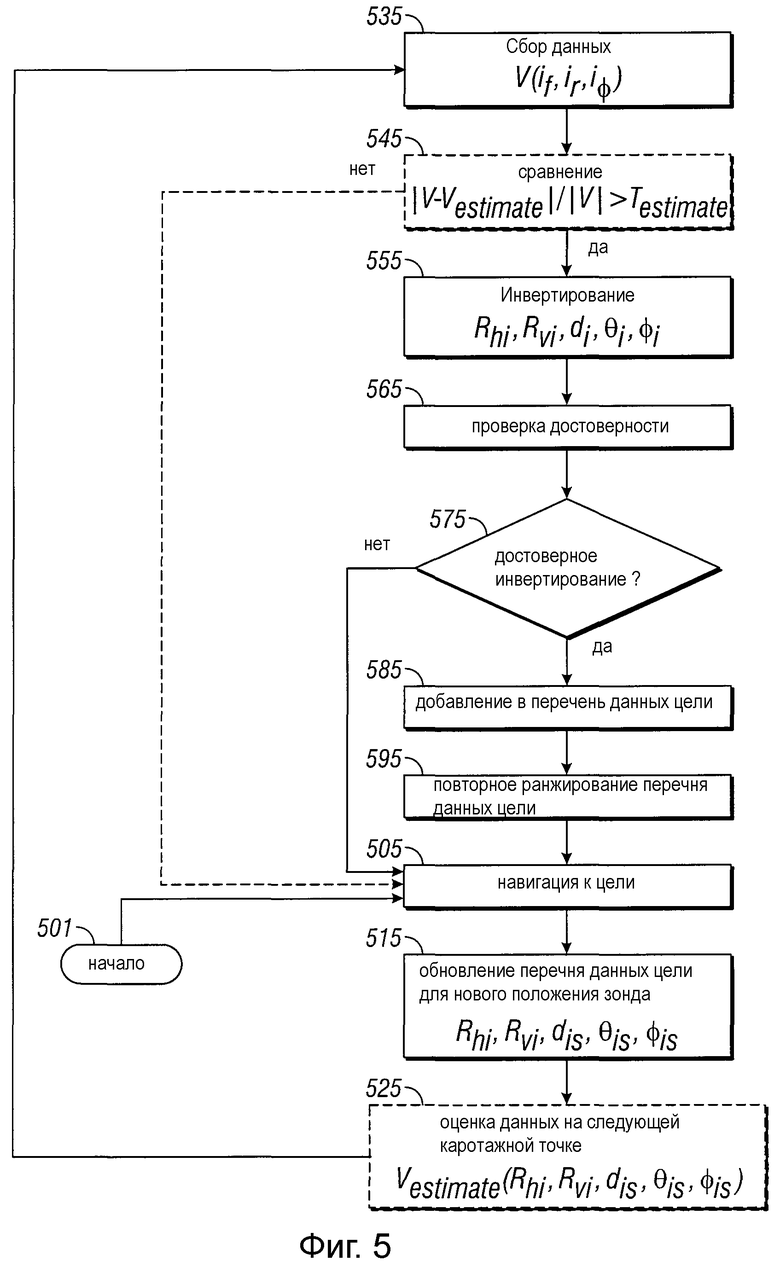
На фиг. 5 показаны элементы примера варианта осуществления способа выполнения операций зонда, согласованных с бурением, после обнаружения целевой зоны, согласно различным вариантам осуществления.
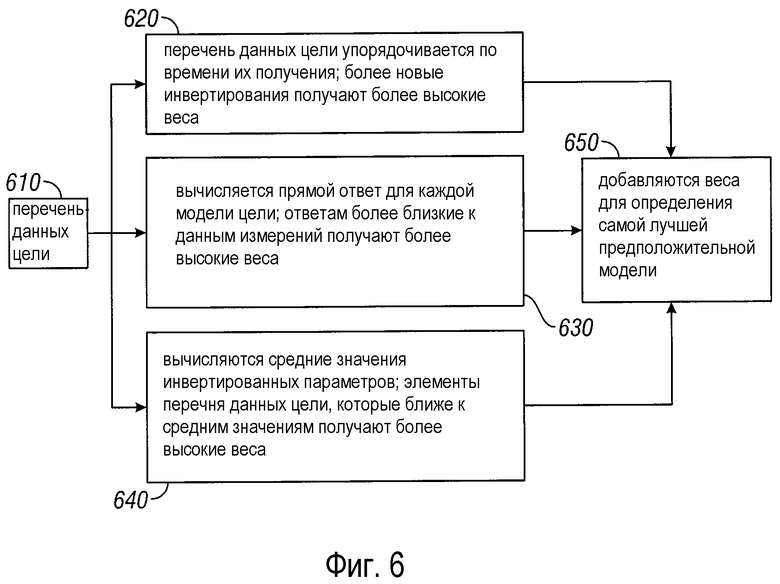
На фиг. 6 показаны элементы примера способа применения ранжирования перечня данных цели для направления геонавигации согласно различным вариантам осуществления.
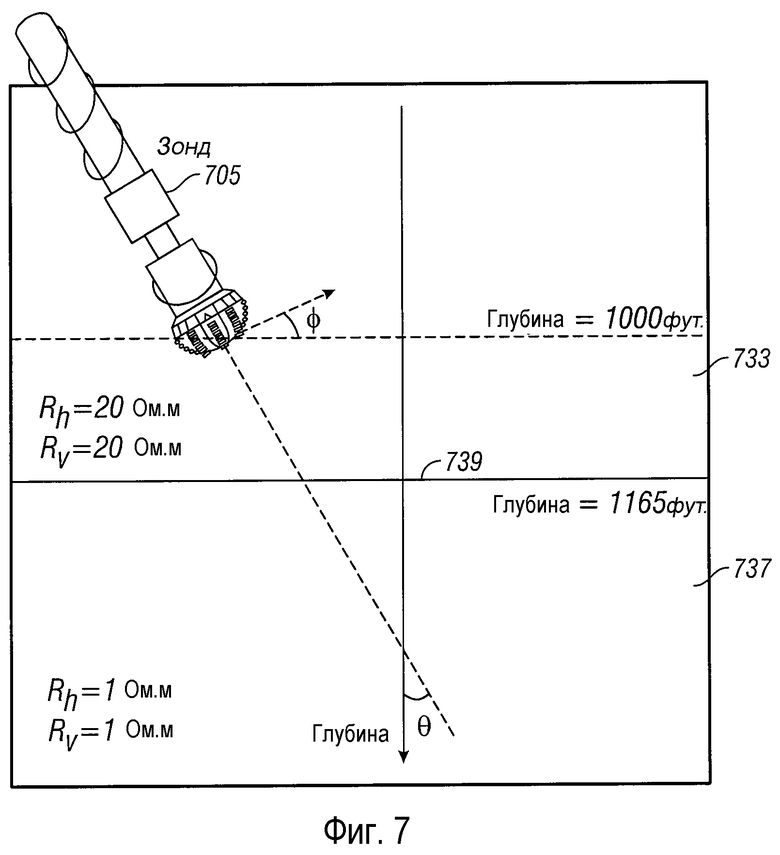
На фиг. 7 показан пример геометрии пласта, используемой в имитационных моделях зонда с большим радиусом исследования согласно различным вариантам осуществления.
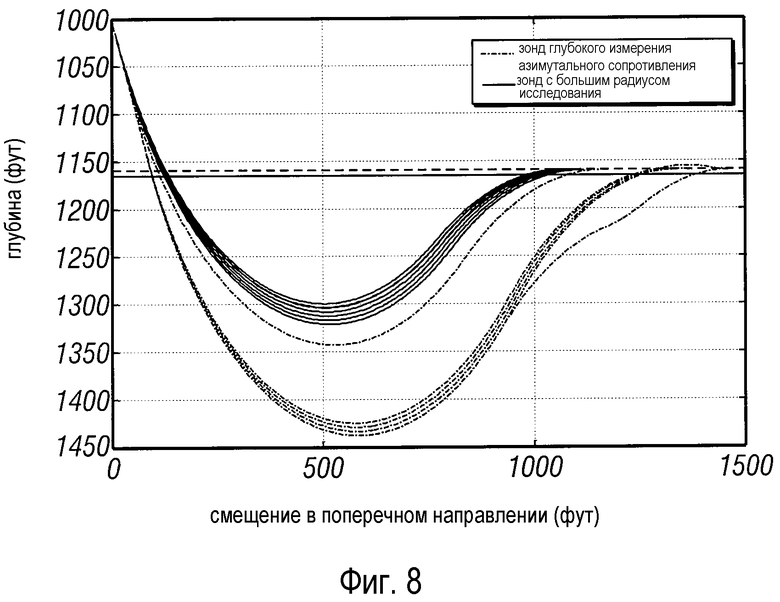
На фиг. 8 показано для скважинных траекторий c наклоном тридцать градусов сравнение результатов зонда азимутального сопротивления с большой глубиной измерения с результатами зонда с большим радиусом исследования согласно различным вариантам осуществления.
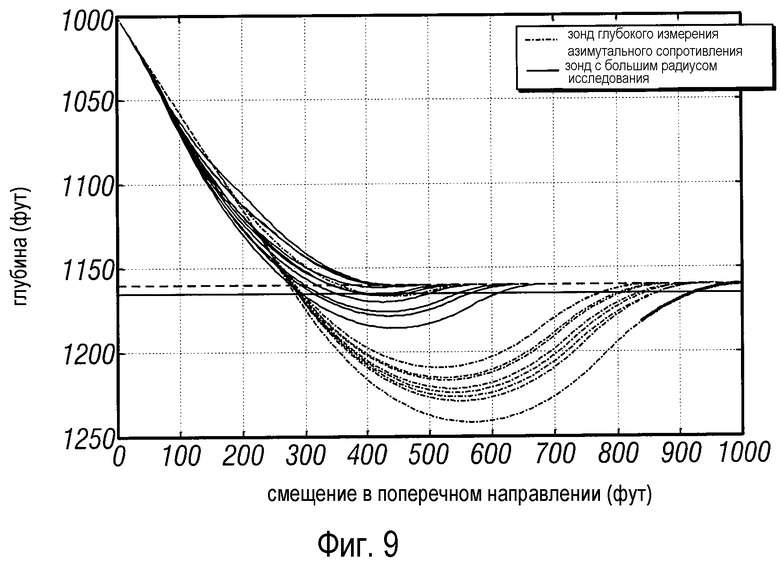
На фиг. 9 показано для скважинных траекторий с наклоном в шестьдесят градусов сравнение результатов зонда азимутального сопротивления с большой глубиной измерения с результатами зонда с большим радиусом исследования согласно различным вариантам осуществления.
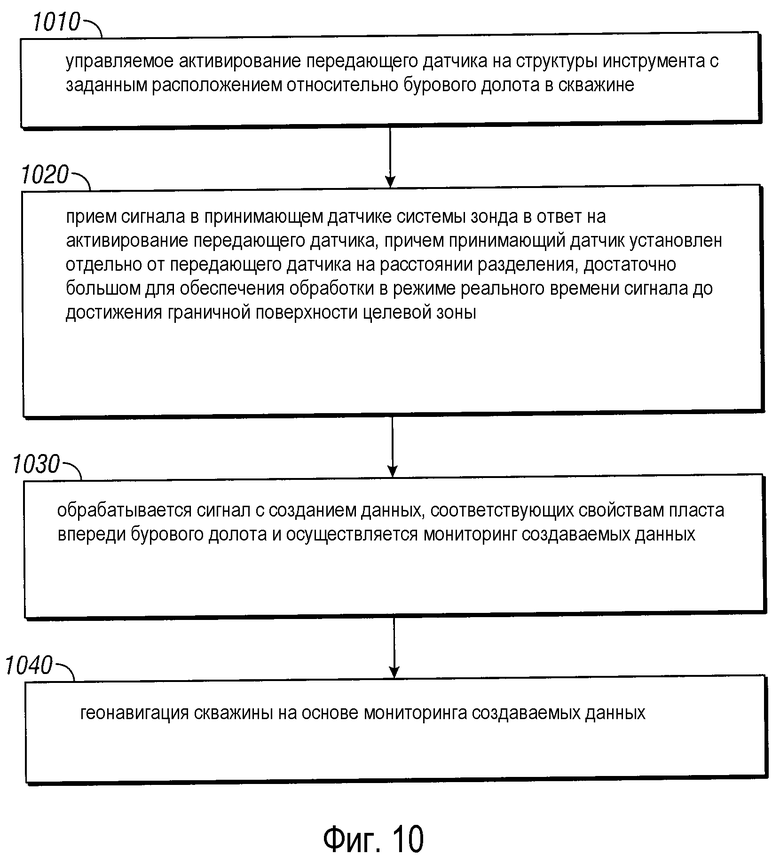
На фиг. 10 показаны элементы примера способа посадки скважины в целевой зоне, согласно различным вариантам осуществления.
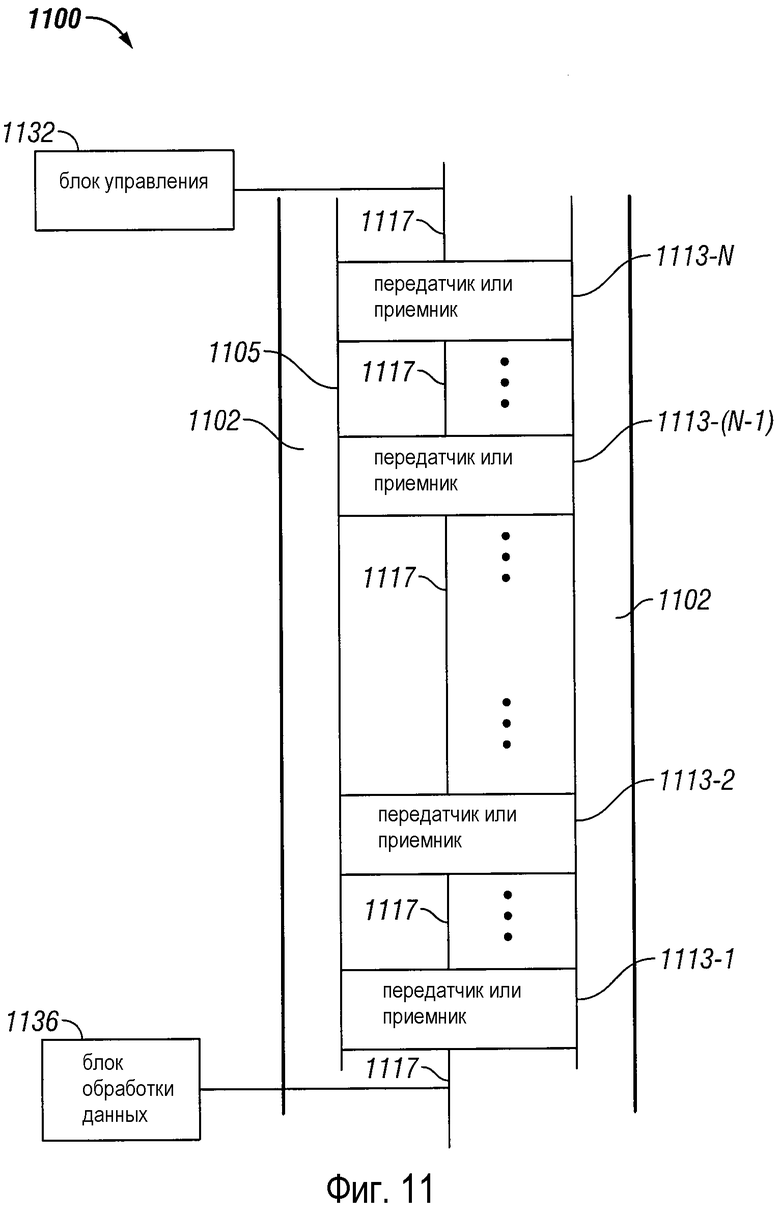
На фиг. 11 показана блок-схема примера устройства для посадки скважины, направленной в цель в целевой зоне, с использованием датчиков с большим радиусом исследования согласно различным вариантам осуществления.
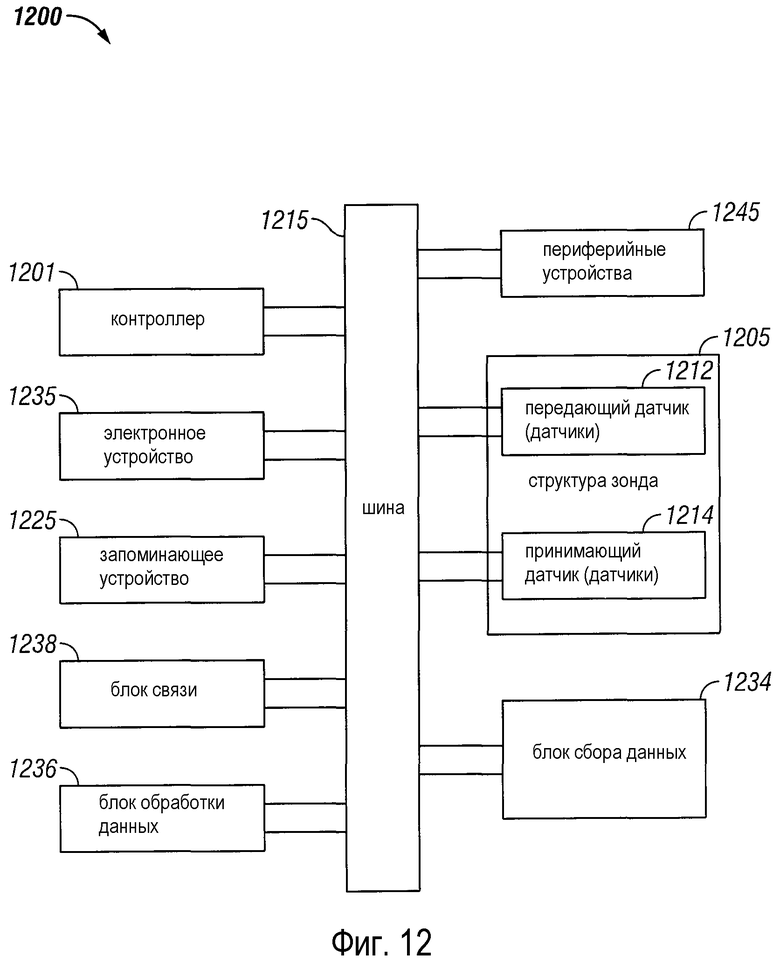
На фиг. 12 показана блок-схема элементов примера системы с блоком обработки данных, функционирующей с зондом с большим радиусом исследования для геонавигации скважины на цель в целевой зоне, согласно различным вариантам осуществления.
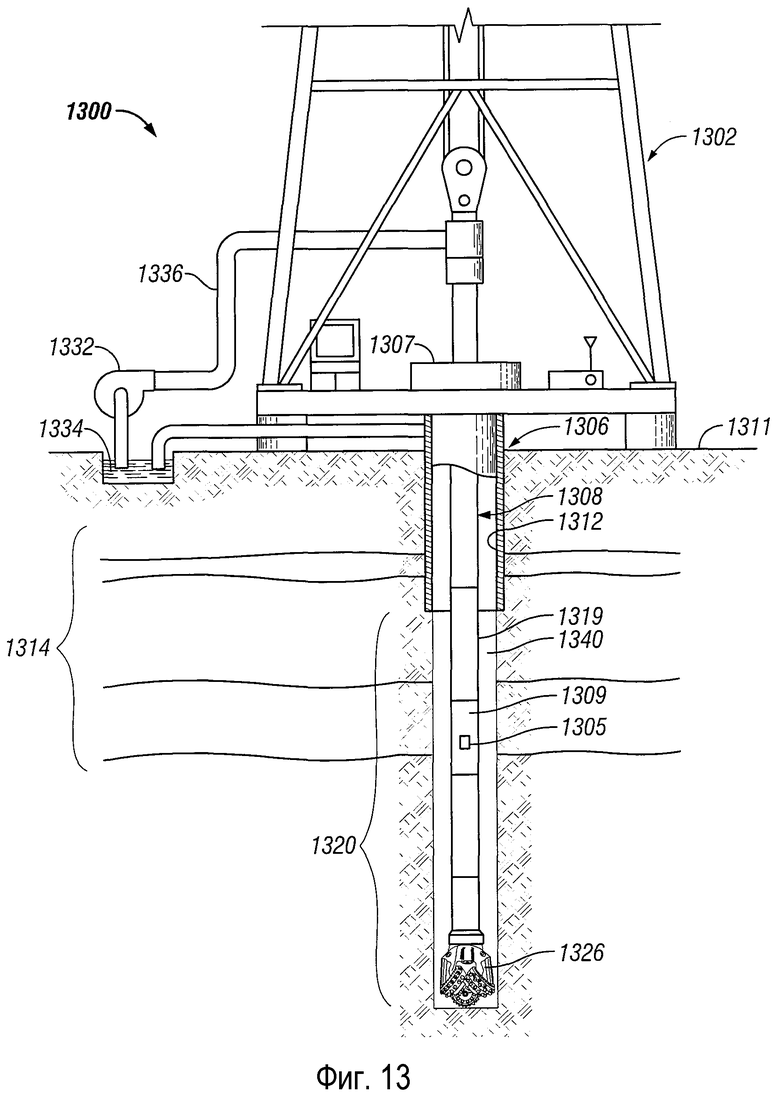
На фиг. 13 показан пример системы на буровой площадке, где система включает в себя зонд, выполненный в конфигурации с датчиками с большим радиусом исследования для геонавигации скважины на цель в целевой зоне, согласно различным вариантам осуществления.
Подробное описание изобретения
Следующее подробное описание с прилагаемыми чертежами является только иллюстративным и неограничивающим, показывая различные варианты осуществления изобретения. Данные варианты осуществления описаны достаточно подробно для обеспечения реализации специалистом в данной области техники данных и других вариантов осуществления. Другие варианты осуществления можно использовать, и структурные, логические и электротехнические изменения можно производить в данных вариантах осуществления. Различные варианты осуществления не обязательно являются взаимоисключающими, поскольку некоторые варианты осуществления можно комбинировать с одним или несколькими другими вариантами осуществления, создавая новые варианты осуществления. Следующее подробное описание, таким образом, не является ограничительным.
В различных вариантах осуществления используется способ со сверхглубокой чувствительностью, с помощью которого можно оптимально посадить скважину в целевой зоне без зарезки бокового ствола и с уменьшенным выходом за установленные пределы или без такого выхода. Такой способ можно реализовать с использованием зонда с большим радиусом исследования, который может обнаруживать граничную поверхность с достаточно большого расстояния, так что может подходить к цели с минимальным или нулевым выходом за установленные пределы. Минимальный выход за установленные пределы может составлять расстояние меньше 10% вертикальной длины целевой зоны. По контрасту с указанным, поскольку стандартные каротажные зонды могут обнаруживать граничную поверхность только, когда находятся непосредственно вблизи нее, при стандартной геонавигации скважинная траектория может в общем выходить за установленные пределы цели.
На фиг. 1 показан процесс геонавигации с зондом 105 с большим радиусом исследования. В данном случае зонд 105 с большим радиусом исследования может использоваться с блоком обработки данных для обнаружения целевой продуктивной зоны в режиме реального времени с минимальной априорной информацией, оптимальной геонавигации скважины в целевую зону, минимизации стоимости бурения и времени, выполнения исследований с большим радиусом пластовых свойств или выполнения одной или нескольких из данных задач. Управление геонавигацией может основываться на скважинных каротажных измерениях с использованием зонда 105 с большим радиусом исследования для увеличения части ствола скважины, располагающейся в продуктивной зоне. Такая геонавигация может использоваться для удержания ствола скважины при проходке в зоне значительного запаса ценного сырья. Зонд 105 с большим радиусом исследования передает сигнал в зону 107 зондирования, которая больше, чем у обычных зондов. Обработка ответов на зондирующие сигналы обеспечивает геонавигацию вдоль траектории 103 геонавигации на целевой плоскости 104 в продуктивной зоне 102. Относительно большая зона 107 зондирования обеспечивает выполнение ряда измерений во время бурения, обеспечивая выполнение нескольких корректировок курса для проводки по траектории 103 геонавигации в локально оптимальном режиме без выхода за установленные пределы в бурении или со значительно уменьшенным выходом.
На фиг. 2 показан пример варианта осуществления системы 205 зонда для применения в качестве электромагнитного зонда с большим радиусом исследования. Система 205 зонда включает в себя передающий датчик 212 и принимающие датчики 214-1, 214-2 и 214-3, расположенные с большим разделением между передающим датчиком 212 и принимающими датчиками 214-1, 214-2 и 214-3, что обеспечивает зонду просмотр на относительно большом расстоянии впереди системы 205 зонда. Например, система 205 зонда может выполняться с большим разносом между передающим датчиком 212 и принимающими датчиками 214-1, 214-2 и 214-3, выбранными для просмотра на 10-200 футов (3-61 м) вперед от бурового долота 226. В примере зонда на фиг. 2 показана система 205 зонда с передающим датчиком 212, установленным на буровом долоте 226, и принимающими датчиками 214-1, 214-2 и 214-3, установленными на утяжеленной бурильной трубе 209 в бурильной колонне 208. В результате данная конфигурация может максимизировать интервал между передатчиком и приемником. Передатчики или приемники могут располагаться вблизи бурового долота или рядом с буровым долотом для принятия решений по бурению в кратчайшие сроки. Такое расположение обеспечивает системе возможность просмотра дальше впереди бурового долота. Передающие или принимающие датчики, такие как передающая антенна 212 и принимающие датчики 214-1, 214-2 и 214-3, могут устанавливаться снаружи утяжеленной бурильной трубы 209, если утяжеленная бурильная труба 209 выполнена из токопроводящего материала, для содействия распространению волн. Также возможна установка передающих или принимающих датчиков внутри утяжеленной бурильной трубы 209, если не токопроводящий материал или перфорации используются для утяжеленной бурильной трубы 209. Передающие и принимающие датчики, такие как передающая антенна 212 и принимающие датчики 214-1, 214-2 и 214-3, могут включать в себя датчики индукционного типа, такие как катушки или соленоиды; датчики-электроды, такие как кольца или диски; тороидальные датчики; акустические датчики, такие как с изгибающимся чувствительным элементом, магнитострикционные или пьезоэлектрические датчики или их комбинации. Электронная аппаратура зонда обычно размещается внутри утяжеленной бурильной трубы. Передающие или принимающие датчики могут работать на низких рабочих частотах для минимизации потерь на диэлектрическую проводимость. Вместе с тем, более высокие частоты можно использовать в подходящей электронной аппаратуре, внося поправки на потери на диэлектрическую проводимость. Структура зонда, как датчика с большим радиусом исследования, не ограничена примером системы 205 зонда. Система 205 зонда может использоваться в процедуре геонавигации, идентичной или аналогичной показанной на фиг. 1.
На фиг. 3 показана блок-схема примера варианта осуществления зонда 301 с электронной аппаратурой, соответствующей зонду с большим радиусом исследования. Зонд 301 включает в себя центр 332 управления системой, передатчики 316-1...316-M, приемники 318-1...318-K, передающие и принимающие антенны 313-1...313-N, блок 334 сбора данных, блок 336 обработки данных и модуль 338 связи. Модуль 338 связи может включать в себя блок телеметрии для связи с наземным оборудованием 311. Центр 332 управления системой может выполняться с возможностью выполнять операции передачи сигналов, приема сигналов и другие операции обработки данных. Передающие и принимающие антенны 313-1...313-N можно выполнить аналогично или идентично передающему датчику 212 и принимающим датчикам 214-1, 214-2 и 214-3 фиг. 2. В общем, имеется N различных антенн в примере зонда 301, и имеется M различных передатчиков и K различных приемников. Переключающая система 331 может осуществлять соединение между антеннами 313-1...313-N и передатчиками 316-1...316-К и между антеннами 313-1...313-N и приемниками 318-1...318-K. Передатчики и приемники могут использовать одну антенну, в таком варианте число антенн, N, может быть меньше суммы M и K. Поворотные или многокомпонентные антенны можно использовать для направленного измерения. Вращение бурильной колонны, на которой зонд 301 или части зонда 301 устанавливаются, можно использовать для получения дополнительной азимутальной чувствительности.
Зонд 301 может работать на нескольких частотах для улучшения чувствительности инвертирования данных по требуемым свойствам пласта в направлении впереди бурения. Данные, полученные с антенн, обрабатываются в блоке 336 обработки данных и передаются в центр 332 управления системой, где решения по обнаружению цели и геонавигации можно принимать в режиме реального времени. Передачу данных можно также выполнять через наземное оборудование 311 с использованием модуля 338 связи, который может комплектоваться блоком телеметрии. Передача данных на наземное оборудование 311 дает возможность мониторинга в режиме реального времени и участия персонала в процессе геонавигации. Альтернативно обработку данных можно выполнять на наземном оборудовании 311, и системные команды на основе указанных обработанных данных можно передавать в центр 332 управления системой с использованием модуля 338 связи. Такие системные команды могут включать в себя без ограничения этим команды для геонавигации.
Сигналы принимаются на одном или нескольких приемниках 318-1...318-K в результате передачи сигналов с одной или нескольких антенн 313-1...313-N, и приема сигналов на одну или несколько антенн 313-1...313-N из слоев пласта в зоне, которую зондируют переданными сигналами. Принятые сигналы из слоев пласта зависят от свойств слоев пласта и расположения антенн 313-1...313-N относительно зондируемых слоев пласта. Сигналы, принятые на приемники 318-1...318-K, могут иметь форму сигналов напряжения. Напряжение на приемниках 318-1...318-K может коррелироваться, как функции горизонтального удельного сопротивления (Rh) и вертикального удельного сопротивления (Rv) слоев пласта, расстояния (d) от зонда до проектной плоскости, угла (θ) наклона между осевой линией зонда и нормалью к целевой плоскости и азимута (Ф) зонда относительно целевой плоскости. Дополнительные параметры можно также учитывать в более сложных моделях пласта без какой-либо потери общности для обработки, которая включает в себя активирование одной или нескольких антенн, прием сигналов в ответ на активирование, инвертирование данных собранных сигналов и выполнение связанных с бурением операций, таких как, без ограничения этим, геонавигация на основе результатов инвертирования данных. В данном документе инвертированные данные означают результаты инвертирования данных, то есть преобразование данных измерений в информацию, коррелированную с признаками, относящимися к слоям пласта. В таком способе выполнение связанных с бурением операций, в том числе геонавигации на основе инвертирования данных, может выполняться автономно при работе зонда согласно набору правил, хранящихся в электронной аппаратуре, связанной с зондом. Для ясности признаки работы такого способа можно рассматривать как два различных режима работы. Первый режим включает в себя рабочие мероприятия, выполняемые перед определением цели. Второй режим включает в себя рабочие мероприятия, выполняемые после определения цели.
На фиг. 4 показаны элементы примера варианта осуществления способа выполнения операций зонда, согласованных с бурением перед обнаружением целевой зоны. Способ фиг. 4 может выполняться, без ограничения этим, с использованием зонда, показанного на фиг. 3, который может включать в себя системы зонда, аналогичные или идентичные симтемам 105 и 205 зонда, показанным на фиг. 1 и 2, соответственно. Зонд, показанный фиг. 3, имеющий несколько принимающих датчиков, может обеспечивать регистрацию нескольких точек данных на одной или нескольких точках сбора данных в процедуре. На позиции 410 осуществляется сбор данных в точке каротажа и передача в блок 336 обработки данных. Данные могут передаваться как матрица (if) различных частот и пар (ir) передатчика и антенны. Матрица может также содержать азимутальные элементы (iФ) дискретизации, когда зонд 301 вращается вокруг осевой линии структуры, на которой устанавливается. В некоторых вариантах реализации способа каротажные точки, близкие во времени и пространстве, можно осреднять для уменьшения шума.
На позиции 420 в блоке 336 обработки данных данные могут инвертироваться до параметров, учитываемых в модели пласта. Инвертирование можно реализовать с использованием модели решения прямой задачи для зонда. Модель решения прямой задачи дает набор математических соотношений для ответной реакции датчика, которые можно применять для обнаружения того, что выбранный датчик должен измерять в конкретной окружающей среде, которая может включать в себя конкретный пласт. Библиотека может включать в себя информацию, касающуюся различных пластовых свойств, которые могут коррелировать с измеренными ответами на выбранные сигналы зондирования. Выполнение операции инвертирования или операций инвертирования может включать в себя выполнение итерационного способа или выполнение способа сопоставления с образцом. Модель решения прямой задачи и/или библиотека может храниться в устройстве с одинаковым машиночитаемым носителем, в устройстве с различными машиночитаемыми носителями или распределяться по системе машиночитаемых носителей на различных площадках. Инструкции в устройстве с машиночитаемыми носителями или системе с машиночитаемыми носителями могут включать в себя инструкции для выполнения операции инвертирования или операций инвертирования с помощью выполнения итерационного способа или выполнения способа сопоставления с образцом.
Результат инвертирования может являться множеством значений параметра, что минимизирует погрешность между измеренным напряжением и прямым ответом модели решения прямой задачи. Метод Левенберга-Маркквардта может использоваться для получения требуемого набора результатов. Метод Левенберга-Маркквардта является стандартной итерационной методикой для решения проблем нелинейных наименьших квадратов, где методика используется для установления минимума функции многих переменных, которая выражается как сумма квадратов нелинейных действительных функций. Данный метод может рассматриваться как комбинация метода наискорейшего спуска и метода Гаусса-Ньютона. Способ инвертирования не ограничивается использованием метода Левенберга-Маркквардта, другие методики можно использовать для инвертирования. Для модели пласта параметры инвертирования для каждого слоя i могут включать в себя горизонтальное удельное сопротивление (R) и вертикальное удельное сопротивление (Rhi) слоя, расстояние (di) до целевой плоскости, угол (θ) наклона между осевой линией зонда и нормалью к целевой плоскости и азимутальный угол (Фi) наклона.
Поскольку электронный шум и шум окружающей среды могут разрушать данные, и вследствие чувствительности результатов инвертирования к шуму параметры инвертирования могут весьма отличаться от реальных параметров пласта. При этом точность инвертирования может подвергаться проверке перед использованием в решениях по геонавигации. В различных вариантах осуществления можно оценивать достоверность параметров инвертирования. На позиции 430, если операция сбора данных только началась, и началось действие инвертирования, бурение скважины продолжается по начальному курсу, позиция 440 и второй набор данных измеряются в другой каротажной точке на позиции 410. Указанные данные второго набора инвертируются на позиции 420, и результаты сравниваются с результатами предыдущего инвертирования на позиции 450 для проверки достоверности инвертированных данных. Перед данным сравнением параметры предыдущего инвертирования, которые являются позиционно-зависимыми, такие как расстояние (di) до целевой плоскости и угол (θ) наклона, могут обновляться для введения поправки точек сбора данных для перемещения скважины. Вместе с тем, указанное может не являться необходимым, если бурение скважины перемещается на пренебрежительно малое расстояние между двумя каротажными точками и изменение мало в сравнении с пороговыми пределами, используемыми в сравнении двух последовательных инвертирований. Если два инвертирования дают результаты, близкие друг с другом относительно заданного порога, результаты считаются достоверными и алгоритм продолжается анализом инвертированных данных в отношении продуктивной зоны на позиции 470. Больше двух результатов инвертирования можно сравнивать. В проверке достоверности можно задействовать блок 336 обработки данных, выполненный с возможностью анализа остаточных погрешностей, связанных с операцией инвертирования. Проверка достоверности может включать в себя сравнение принятых значений напряжения. Проверка достоверности может включать в себя сравнение алгебраических функций принятых значений напряжения в отношении каждого принятого значения напряжения или расчетного значения. Проверка достоверности может включать в себя выполнение различных комбинаций обработки данных, рассмотренных в данном документе. Оптимальная оценка достоверности может зависеть от типа шума и типа исследуемого пласта. Если значение достоверности в инвертировании ниже установленного порога, бурение может продолжаться по своему курсу, на позиции 440 с выполнением другого сбора данных на позиции 410, которые подвергаются инвертированию и проверке достоверности во вновь выработанных данных инвертирования.
На позиции 470, после получения подтверждения достоверности в инвертировании, может выполняться определение в зонде 301, например, имеет ли пласт требуемые свойства на основе инвертированных параметров. Например, содержание углеводорода может являться свойством, представляющим интерес. Альтернативно другие свойства могут являться представляющими интерес в исследовании для идентификации подземных зон, которые следует обойти с помощью геонавигации. Если результат инвертирования согласуется с требуемым признаком, целевая плоскость может обнаруживаться на основе параметров инвертирования. Например, в варианте поверхности раздела воды и нефти цель может устанавливаться на плоскости, параллельной и расположенной на расстоянии от поверхности раздела воды и нефти внутри нефтеносной зоны. Если инвертированный результат не согласуется с требуемой характеристикой, скважину продолжают по исходному курсу на позиции 440, и описанные выше этапы (410-470) повторяют до достижения требуемой цели.
Когда цель обнаруживается, можно осуществлять навигацию бурения скважины к цели по оптимальному курсу. Оптимальный курс определяется как траектория, которая минимизирует расстояние, на котором скважина является параллельной и расположенной в целевой плоскости. Оптимальный курс может все время удовлетворять критерию набора угла, который устанавливает предел максимального набора угла, который может получаться на данном расстоянии. Типичные траектории набора угла соответствуют 10° на 100 футов (31 м). Данное численное значение может значительно варьироваться на основе имеющейся технологии и свойств пласта. В варианте указанных выше двух условий вычисление данного оптимального курса включает в себя решение геометрической задачи с построением окружностей и линий, которое является несложным и поэтому в данный документ не включено. Вместе с тем, в различных условиях геонавигации могут использоваться различные варианты вычисления оптимального курса, которые могут включать в себя итерационное решение.
На фиг. 5 показаны элементы варианта осуществления примера способа проведения операций бурения после обнаружения целевой зоны. Как рассмотрено выше и показано на фиг. 4, после пуска, позиция 501, при навигации скважины к цели на позиции 505 зависимые от положения параметры инвертирования обновляются на позиции 515. На позиции 525 оценка данных на следующей каротажной точке на основе указанных обновленных параметров может создаваться с использованием модели решения прямой задачи, например создания оценки напряжения Vestimate. После создания оценки данных сбор данных может выполняться на позиции 535, за которым следует инвертирование на позиции 555 с использованием собранных данных. Поскольку инвертирование может включать в себя большое число параметров, оно может требовать значительного времени работы процессора и может являться нецелесообразным для выполнения на каждой каротажной точке во внутрискважинном блоке обработки данных или наземном блоке обработки данных. Для минимизации числа затратных по времени операций инвертирования необходимость инвертирования может устанавливаться на каждом этапе. На позиции 545, если данные измерений являются близкими к приблизительному расчету позиции 525, предыдущий результат инвертирования считается точным и инвертирование не выполняется. После инвертирования данных на позиции 565 проверяется достоверность результатов данного нового инвертирования. Вычисление достоверности здесь является аналогичным рассмотренному выше и показанному на фиг. 4. Если достоверность является неудовлетворительной, выполнение навигации продолжается к цели, и сбор и обработка данных продолжается. Если достоверность является удовлетворительной, определенные оценки параметров добавляются в перечень данных цели на позиции 585. Затем на позиции 595 каждая позиция в данном перечне ранжируется (присваивается ранг) или повторно ранжируется для определения ранга, который может являться наиболее точным.
На фиг. 6 показаны элементы примера варианта осуществления способа применения ранжирования перечня 610 данных цели для направления геонавигации. Несколько операций сбора данных может проводиться в точке каротажа или на коротком расстоянии от каротажной точки с использованием нескольких принимающих датчиков, идентичных или аналогичных принимающим датчикам фиг. 2. На позиции 620 перечень возможных данных цели может упорядочиваться по времени их получения. Более новым оценкам даются более высокие веса, поскольку погрешности в локации цели более старых оценок являются в общем более высокими. В общем, исключением является только ситуация выхода за установленные пределы, где более старые оценки могут являться более точными, чем более новые оценки. На позиции 630 с использованием модели решения прямой задачи элементам перечня, дающим величины, более близкие к данным измерений, даны более высокие веса. На позиции 640 оценки могут также упорядочиваться согласно их удаленности от остальных оценок. Среднее или срединное значение оценок может использоваться для данной цели. Более высокие веса даются оценкам, которые ближе к средним значениям. Таким образом, данная процедура может использоваться для исключения резко отклоняющихся значений оценок. Перечень данных цели может ранжироваться согласно тому, насколько удовлетворительно параметры инвертирования прогнозируют данные измерений. На позиции 650 результаты указанных различных этапов (620, 630 и 640) можно комбинировать, и элемент регистра с самым высоким общим весом может выбираться как лучшая оценка цели. Мероприятия позиций 620, 630, и 640 могут проводиться в любом порядке. В различных вариантах осуществления алгоритм ранжирования может включать в себя подмножество операций 620, 630 и 640 без выполнения всех операций 620, 630 и 640. Могут проводиться дополнительные процедуры для оптимизации алгоритма ранжирования.
После ранжирования позиций в перечне данных цели может осуществляться навигация скважины к месту оценки цели, считающейся наиболее точной. Если инвертирование не выполняется, может осуществляться навигация скважины к цели, использованной в предыдущем этапе. Перечень данных цели может обновляться для учета изменений положения зонда, то есть для модели вычисляются обновленные значения расстояния dis до цели, угла θis наклона и азимутального угла Фis наклона. После завершения обновления описанные выше операции обработки данных могут повторяться до посадки скважины в целевую плоскость. Может осуществляться навигация скважины после достижения скважиной целевой плоскости с использованием описанных выше операций обработки данных для предотвращения отклонения скважины от своей траектории и ее сохранения в продуктивной зоне. Комбинация структуры инструмента для сбора данных и обработки собранных данных может обеспечивать его функционирование в качестве зонда упреждающей навигации. Хотя цель описана в данном документе как плоскость, цель может состоять из других форм, и обработка данных согласно идеям данного документа может прямо применяться к целям с формами иными, чем плоскость.
В различных вариантах осуществления создан способ, обеспечивающий обнаружение проектной продуктивной зоны в режиме реального времени с помощью вычисления оптимальной траектории к цели и посадку скважины в требуемой целевой зоне с минимальным временем бурения. Такая процедура соответствует критерию стоимости и эффективности, поскольку не требует какой-либо дополнительной информации из опорных скважин или любых предыдущих пересечений с проектной скважиной. В результате, данная процедура может уменьшать общее расстояние бурения и время с помощью исключения или минимизации выхода за установленные пределы расположения цели. Можно получать сокращение выхода за установленные пределы по меньшей мере на 100 футов (31 м). Способ может применяться в случае, если скважина является наклонно-направленной.
На фиг. 7 показан пример геометрии пласта, используемой в имитационных моделях зонда с большим радиусом исследования. Увеличенный радиус исследования зонда 705, имеющего конфигурацию, аналогичную или идентичную зонду 105 с большим радиусом исследования фиг. 1 и/или аналогичную или идентичную зонду 205 с большим радиусом исследования фиг. 2, можно проиллюстрировать, сравнивая результаты моделирования с электромагнитным зондом, глубина исследования у которого меньше, чем использующимся в настоящее время. Для выполнения указанного зонд 705 с большим радиусом исследования, у которого гораздо больше расстояние между передатчиком и приемником, можно сравнить с зондом азимутального сопротивления с большим радиусом измерения. Ось глубины проходит в направлении строго вертикально относительно земли, с увеличением глубины вниз. Скважина считается расположенной внутри изотропного, имеющего сопротивление слоя 733 с удельным сопротивлением 20 Ом·м, и бурится к поверхности 739 раздела к слою 737, имеющему меньшее сопротивление. Данный второй слой 737 является также изотропным с удельным сопротивлением 1 Ом·м. Для иллюстрации целевая плоскость выбрана на позиции в 5 футов (1,5 м) от граничной поверхности, внутри имеющего сопротивление слоя 733 на глубине 1160 футов (354 м). Зонд 705 может представлять собой модель, имеющую передатчик с магнитным моментом, параллельным осевой линии зонда, установленный на буровом долоте. В модели имеются три приемные антенны, аналогичные показанным на фиг. 2. Все три приемные антенны установлены под углом 45° и расположены на расстоянии 25 футов (7,6 м), 37,5 фута (11,4 м) и 50 футов (15,2 м) от передатчика соответственно. Данная модель зонда выбиралась как многочастотная система, работающая на частотах 500 Гц, 2 КГц, 6 КГц и 18 КГц. Принят азимутальный угол наклона 15°. Имитационное моделирование началось с передатчиком на 1000 футов (305 м). Принята максимальная скорость геонавигации зондов, составляющая 10° отклонения на 100 футов (31 м). Относительная диэлектрическая проницаемость и относительная магнитная проницаемость материала слоев 733 и 737 принята за единицу. Мультипликативный шум с равномерным распределением добавлялся к сигналу в имитационных моделях. Выбрана пиковая величина шума, составляющая 0,5% величины сигнала.
На фиг. 8 показано для скважинных траекторий с наклоном в тридцать градусов сравнение результатов зонда азимутального сопротивления с результатами зонда с большим радиусом исследования. В моделировании скважинные траектории с наклоном в тридцать градусов означают, что принят начальный угол θ наклона, θ=30°. Упомянутый способ, рассмотренный выше и показанный на фиг. 4-6, применялся как для скважины с зондом азимутального сопротивления, так и для скважины с зондом с большим радиусом исследования. Имитационное моделирование повторялось 10 раз в обоих случаях с учетом случайного характера шума. Результаты показывают, что способ может успешно использоваться для посадки на целевую плоскость с традиционным зондом, например, зондом азимутального сопротивления, но наиболее успешная работа наблюдается при использовании зонда с большим радиусом исследования. В среднем зонд с большим радиусом исследования начинает видеть проектную зону на расстоянии 140 футов (43 м) от граничной поверхности, что сравнивается приблизительно с 20 футами (6,1 м), для зонда азимутального сопротивления. В результате выход за установленные пределы уменьшается на около 120 футов (37 м), и общее расстояние горизонтального бурения уменьшается на приблизительно 500 футов (152 м).
На фиг. 9 показано для скважинных траекторий с начальным углом наклона, равным шестьдесят градусов, сравнение результатов зонда азимутального глубинного зондирования методом сопротивлений с результатами зонда с большим радиусом исследования. Способ, рассмотренный выше и показанный на фиг. 4-6, применялся вновь. Такой способ обеспечивает геонаведение скважины с помощью зонда с большим радиусом исследования к целевой зоне с небольшим выходом или без выхода за установленные пределы, а скважина с зондом азимутального глубинного зондирования выходит за установленные пределы цели приблизительно на 70 футов (214 м) в среднем, и общее расстояние горизонтального бурения увеличивается приблизительно на 350 футов (107 м). Результаты имитационного моделирования показывают, что способ, приведенный в данном документе, может успешно применяться для обнаружения целевой зоны в режиме реального времени без априорной информации, что геонавигация к целевой зоне и горизонтальная установка скважин могут успешно выполняться, и что способ является наиболее предпочтительным, когда применяется с использованием зонда с высокой глубиной исследования. При высокой глубине исследования может осуществляться геонавигация скважины к продуктивной зоне с небольшим выходом или без выхода за установленные пределы. В результате, время и стоимость бурения минимизируются.
На фиг. 10 показаны элементы варианта осуществления примера способа посадки скважины в целевой зоне. На позиции 1010 активируется передающий датчик на структуры инструмента с заданным расположением относительно бурового долота в скважине. На позиции 1020 принимается сигнал в принимающем датчике структуры инструмента в ответ на активирование передающего датчика. Принимающий датчик может устанавливаться на удалении от передающего датчика на расстоянии, достаточно большом для обеспечения обработки в режиме реального времени сигнала до достижения граничной поверхности целевой зоны в бурении. Данное расстояние разделения обеспечивает создание сигнала зондирования с передающего датчика впереди бурового долота и прием и обработку сигналов от пласта, создаваемых в ответ на сигнал зондирования, так что корректировка курса бурения может проводиться в процессе бурения. Дополнительные принимающие датчики могут располагаться на структуры инструмента, при этом передающим датчиком, установленным на удалении от передатчика на расстояние разделения, достаточно большое для обеспечения обработки в режиме реального времени сигнала перед достижением граничной поверхности целевой зоны в операции бурения. Передающий датчик или датчики и принимающий датчик или датчики могут располагаться вдоль оси структуры инструмента аналогично или идентично варианту осуществления такой структуры инструмента, раскрытой в данном документе.
На позиции 1030 обрабатывается сигнал. Обработка может включать в себя создание данных, соответствующих свойствам пласта впереди бурового долота и мониторинг создаваемых данных. Обработка может проводиться в режиме реального времени в процессе бурения. Создание данных, соответствующих свойствам пласта, может включать в себя проведение операции инвертирования в отношении принятых сигналов. Результаты операции инвертирования могут включать в себя одно или несколько из следующего: горизонтальное удельное сопротивление слоя пласта, вертикальное удельное сопротивление слоя пласта, расстояние от бурового долота до цели, угол наклона между осевой линией структуры инструмента и нормалью к цели или азимут структуры инструмента относительно цели. Результаты инвертирования могут проверяться, так что проверка точности результатов операции инвертирования проводится перед использованием результатов операции инвертирования для геонавигации скважины. Пример способа проверки может включать в себя сравнение результатов двух операций инвертирования, так что значение разности между результатами двух операций инвертирования меньше установленного порога указывает на уровень достоверности, обеспечивающий продолжение движения по траектории на цель.
Операция инвертирования может проводиться с применением методики Левенберга-Маркквардта в отношении принятого сигнала. Можно реализовать другие методики. Проведение операции инвертирования может включать в себя создание множества значений параметра, что минимизирует погрешность между измеренным напряжением и прямым ответом модели решения прямой задачи. Измеренное напряжение соответствует принятому сигналу на принимающем датчике системы зонда, который создается впереди бурового долота в ответ на сигнал, переданный с передающего датчика структуры инструмента. Множество значений параметра может создаваться на каждой каротажной точке бурения или не на каждой каротажной точке в зависимости от разности величины принятых сигналов на последовательных каротажных точках. Способ посадки скважины на цель в целевой зоне может выполняться в итерационном режиме для заданной цели и целевой зоны. Альтернативно способ может включать в себя итерационное управление активированием передающих датчиков, прием сигнала, соответствующего активированию, и обработку принятого сигнала для идентификации цели или цели продуктивной зоны. Способ идентификации может включать в себя сравнение результатов инвертирования со свойствами требуемой целевой зоны, которые сохраняются в запоминающем устройстве. Использование передающих датчиков и принимающих датчики, разделенных как датчиков с большим радиусом исследования, обеспечивает идентификацию зон, которые следует обходить в идентифицированной целевой зоне, и установление цели в целевой зоне с обходом таких зон.
На позиции 1040 ведется геонавигация скважины на основе мониторинга создаваемых данных. В различных вариантах осуществления мониторинг создаваемых данных может включать в себя сравнение создаваемых данных с ранее созданными данными. Геонавигация скважины может осуществляться на основе сравнения создаваемых данных с ранее созданными данными. Геонавигация может направлять бурение скважины так, что скважина подходит к цели в целевой зоне с минимальным выходом или без выхода за установленные пределы целевой зоны. Геонавигация скважины включает в себя направление бурящейся скважины на цель, идентифицированную как целевая плоскость в целевой зоне. Цель не ограничивается плоскостью цели, цель может иметь другие формы. Форма может зависеть от структуры в слоях пласта целевой зоны, которые преднамеренно обходятся. Геонавигация может проводиться вдоль курса согласно критерию предельного набора угла отклонения. Различные критерии предельного набора угла отклонения могут устанавливаться. Например, критерий предельного набора угла отклонения может включать в себя максимальный набор угла около 10° на 100 футов (31 м).
Процесс геонавигации с использованием датчиков с большим радиусом исследования может проводиться в итерационном режиме, в котором необязательные операции могут проводиться во время итерации. Например, способ может включать в себя пропуск действия инвертирования в итерации. Процедура с вариантом пропуска инвертирования может включать в себя повторение управления активированием передающего датчика, прием сигнала, соответствующего активированию, обработку принятого сигнала для создания инвертированных данных и геонавигацию скважины в итерационном процессе, так что итерационный процесс обеспечивает обнаружение цели или геонавигацию на цель. Процедура может включать в себя создание для следующего принимаемого сигнала расчетного значения сигнала от обработки последнего обработанного сигнала. Следующий сигнал можно получать, и измеренное значение следующего сигнала можно создавать. Если разность между расчетным значением сигнала и измеренной величиной сигнала не выходит за пороговую величину, блок обработки данных может воздерживаться от обработки, например, инвертирования данного принятого следующего сигнала и вводить инвертированные данные, созданные из последнего обработанного сигнала как точного. Создание расчетного значения для следующего принимаемого сигнала может включать в себя использование модели решения прямой задачи. Используемая модель решения прямой задачи может являться моделью решения прямой задачи, используемой в операции инвертирования для создания инвертированных данных из последнего сигнала.
В различных вариантах осуществления способ посадки скважины, направленной в цель в целевой зоне, может также включать в себя повторение активирования управления передающего датчика и прием сигнала, соответствующего активированию на различных каротажных точках во время бурения скважины; выполнение проверки достоверности инвертированных данных, создаваемых из принятого сигналов, соотнесенных с одной или несколькими из каротажных точек; добавление в перечень данных цели инвертированных данных, удовлетворяющих проверке достоверности, или параметров, создаваемых из инвертированных данных, удовлетворяющих проверке достоверности; ранжирование перечня данных цели и осуществление геонавигации к цели на основе ранжированного перечня данных цели. В итерационном процессе ранжированные элементы перечня данных цели могут включать в себя повторно ранжированные элементы перечня данных цели на основе обновленных параметров. Ранжирование перечня данных цели может включать в себя сортировку перечня данных цели по времени создания инвертированных данных. Сортировка перечня данных цели по времени может включать в себя применение весов к элементам перечня данных цели, при которой более высокие веса применяются к последним, на данный момент созданным инвертированным данным. Ранжирование перечня данных цели может включать в себя вычисление упреждающего ответа для ряда моделей цели и применение весов согласно разности между каждым прямым ответом и соответствующим ему измеренным ответом так, что чем меньше разность, тем более высоким является присвоенный вес. Ранжирование перечня данных цели включает в себя вычисление средних значений инвертированных данных в перечне данных цели, и применение весов к инвертированным данным согласно разности между значениями инвертированных данных в перечне данных цели и средними значениями инвертированных данных, при этом чем меньше разность, тем больше присвоенный вес.
Ранжирование перечня данных цели может включать в себя комбинирование одной или нескольких различных процедур ранжирования с использованием созданных весов в данных процедурах. Например, ранжирование перечня данных цели может включать в себя сортировку перечня данных цели по времени создания инвертированных данных и применение веса по времени так, что более высокий вес по времени дается последним, на данный момент созданным инвертированным данным; вычисление упреждающих ответов для ряда моделей цели и применение веса по ответу согласно разности между каждым упреждающим значением ответа и соответствующим ему измеренным значением ответа, при этом чем меньше разность, тем больше присвоенный вес по ответу; и вычисление средних значений инвертированных данных в перечне данных цели и применение усредненных значений веса к инвертированным данным согласно разности между значениями инвертированных данных в перечне данных цели и средними значениями инвертированных данных, так что, чем меньше разность, тем больше присвоенного веса по усредненному значению. Вес по времени, вес по ответу и усредненное значение веса могут добавляться к каждому элементу в перечне данных цели для определения модели для геонавигации. В дополнение после достижения цели, где цель имеет некоторую форму в целевой зоне, способ геонавигации может включать в себя повторение управления активированием передающего датчика и прием сигнала, соответствующего активированию в различных каротажных точках во время бурения скважины; выполнение способа установления достоверности инвертированных данных, созданных по принятым сигналам, соотнесенным по одной или нескольким каротажным точкам; и геонавигацию скважины вдоль формы цели.
На фиг. 11 показана блок-схема варианта осуществления устройства 1100 для посадки скважины, направленной в цель в целевой зоне с использованием датчиков с большим радиусом исследования. Устройство 1100 включает в себя структуру инструмента 1105 с расположением датчиков 1113-1, 1113-2...1113-(N-1), 1113-N вдоль продольной оси 1107 структуры инструмента 1105. Каждый датчик 1113-1, 1113-2...1113-(N-1), 1113-N может использоваться как передающий датчик или принимающий датчик под управлением блока 1132 управления. Блок 1132 управления выполнен с функциональной возможностью выбора одного или нескольких передающих датчиков в расположении датчиков 1113-1, 1113-2...1113-(N-1), 1113-N и выбора одного или нескольких принимающих датчиков в расположении датчиков 1113-1, 1113-2...1113-(N-1), 1113-N, так что выбранный принимающий датчик устанавливается отдельно от выбранного передающего датчика на расстоянии разделения, достаточно большом для обеспечения обработки в режиме реального времени сигнала, принятого на выбранном принимающем датчике в ответ на активирование выбранного передающего датчика, в процессе бурения до достижения скважиной граничной поверхности целевой зоны. Схема расположения датчиков 1113-1, 1113-2...1113-(N-1), 1113-N включает в себя, без ограничения этим, расположение наклонных антенн. Для схем расположения, в которых датчики 1113-1, 1113-2...1113-(N-1), 1113-N установлены наклонно, каждый датчик может располагаться наклонно относительно продольной оси 1117. Вместе с тем, датчики 1113-1, 1113-2...1113-(N-1), 1113-N могут располагаться иначе относительно продольной оси 1117. Большое расстояние, разделяющее между собой выбранный передающий датчик и выбранный принимающий датчик, обеспечивает сбор данных пласта далеко впереди бурения. Для данного расстояния разделения расстояние для исследований с большим радиусом является наибольшим для передающего датчика, установленного на буровом долоте для операции бурения. Датчики 1113-1, 1113-2...1113-(N-1), 1113-N и расположение датчиков 1113-1, 1113-2...1113-(N-1), 1113-N может реализовать, например, аналогично или идентично датчикам и устройству с большим радиусом исследования, соответствующему показанному на фиг. 1-10, 12 и 13. Датчики 1113-1, 1113-2...1113-(N-1), 1113-N и устройство датчиков 1113-1, 1113-2...1113-(N-1), 1113-N можно реализовать в вариантах применения измерений во время бурения (системы измерений во время бурения), таких как каротаж во время бурения (система каротажа во время бурения).
Устройство 1100 может включать в себя блок 1132 управления, который управляет созданием передаваемых сигналов и сбором информации принятых сигналов, соответствующих переданным сигналам. Создание передаваемых сигналов можно проводить, создавая сигналы различных частот. Собранные принятые сигналы могут передаваться в блок 1136 обработки данных в надлежащем формате для выполнения инвертирования данных, созданных из сигналов, принятых на принимающие антенны в расположении датчиков 1113-1, 1113-2...1113-(N-1), 1113-N. Блок 1136 обработки данных можно сконструировать с возможностью использования модели решения прямой задачи для выполнения инвертирования данных, созданных по сигналам, принятым на принимающие антенны. Блок 1136 обработки данных можно сконструировать с возможностью получения пластовых свойств и данных, идентифицирующих состояние бурения, которые могут согласовываться с положением бурового долота, относительно цели в целевой зоне для бурения с использованием итерационной обработки данных. Можно также применять способ сопоставления с образцами. Блок 1136 обработки данных может располагаться отдельно от блока 1132 управления или встраиваться в блок 1132 управления. Блок 1132 управления и блок обработки данных можно реализовать, например, аналогично или идентично блокам управления и блокам обработки данных, показанным на фиг. 1-10, 12 и 13.
Различные компоненты системы, включающие в себя зонд, имеющий один или несколько датчиков, функционирующих в положениях передачи и положениях приема, разделенных относительно большими расстояниями, и блок обработки данных, описанные в данном документе или аналогичные, можно реализовать в основанных на комбинациях агрегатного и программного обеспечения вариантах реализации. Данные варианты реализации могут включать в себя машиночитаемое запоминающее устройство с выполняемыми машиной инструкциями, например компьютерное запоминающее устройство с выполняемыми компьютером инструкциями, для управления активированием передающего датчика на структуры инструмента, расположенного на буровом долоте в скважине; прием сигнала в принимающем датчике структуры инструмента в ответ на активирование передающего датчика, где принимающий датчик устанавливается отдельно от передающего датчика на расстоянии разделения, достаточно большом для обеспечения обработки в режиме реального времени сигнала до достижения граничной поверхности целевой зоны; обработку сигнала, включающую в себя создание данных, соответствующих свойствам пласта впереди бурового долота, и мониторинг создаваемых данных; и геонавигацию скважины на основе мониторинга создаваемых данных, при которой скважина подходит к цели в целевой зоне с минимальным выходом или без выхода за установленные пределы целевой зоны. Инструкции могут включать в себя инструкции для управления зондом и ведения геонавигации согласно идеям данного документа. Дополнительно машиночитаемое запоминающее устройство, в данном документе, является физическим устройством, сохраняющим данные, представленные физическими структурами в устройстве. Примеры машиночитаемых запоминающих устройств включают в себя, без ограничения этим, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), запоминающее устройство на магнитном диске, оптическое запоминающее устройство, флэш-память и другие электронные, магнитные и/или оптические запоминающие устройства.
На фиг. 12 показана блок-схема элементов примера варианта осуществления системы 1200, имеющей структуру 1205 зонда, выполненную в конфигурации с датчиками, расположенными так, что передающий датчик устанавливается отдельно от принимающего датчика на расстоянии разделения, достаточно большом для обеспечения обработки в режиме реального времени сигнала, принятого в ответ на переданный сигнал зондирования до достижения граничной поверхности целевой зоны в бурении. Система 1200 включает в себя структуру 1205 зонда, имеющую расположение передающих датчиков 1212 и принимающих датчиков 1214, которую можно реализовать аналогично или идентично расположениям датчиков, рассмотренным в данном документе. Система 1200 может выполняться с возможностью функционирования согласно идеям данного документа.
Система 1200 может включать в себя контроллер 1201, запоминающее устройство 1225, электронное устройство 1235 и блок 1238 связи. Контроллер 1201, запоминающее устройство 1225 и блок 1238 связи могут выполняться с возможностью функционировать в качестве блока обработки данных для управления работой структуры 1205 зонда, имеющей расположение передающих датчиков 1212 и принимающих датчиков 1214, и для выполнения одной или нескольких операций инвертирования на сигналах, принятых структурой 1205 зонда для геонавигации скважины, направленной на цель в целевой зоне способом, аналогичным или идентичным способам, рассмотренным в данном документе. Блок 1236 обработки данных для использования в анализе данных, для проверки измерений и обеспечения индикации, используемой для выполнения коррекций курса для геонавигации скважины, можно реализовать как один блок или распределить среди компонентов системы 1200, включающей в себя электронное устройство 1235. Контроллер 1201 и запоминающее устройство 1225 могут функционировать, управляя активированием передающих датчиков 1212 и выбором принимающих датчиков 1214 в структуре 1205 зонда и управления схемами обработки данных согласно процедурам измерения и обработки сигнала, как описано в данном документе. Блок 1234 сбора данных можно сконструировать с возможностью сбора информации сигналов, принятых на принимающие датчики 1214 в ответ на сигналы зондирования, созданные передающими датчиками 1212. Блок 1234 сбора данных можно реализовать как один блок или распределить среди компонентов системы 1200, включающей в себя электронное устройство 1235. Блок 1234 сбора данных, блок 1236 обработки данных и/или другие компоненты системы 1200 можно выполнять в конфигурации, например, функционирующей аналогично или идентично компонентам зонда 301 фиг. 3 и/или аналогично или идентично любому из способов, соответствующих показанному на фиг. 4-6 и 10.
Блок 1238 связи может включать в себя внутрискважинные коммуникационные линии для надлежащим образом установленных датчиков. Так внутрискважинные коммуникационные линии могут включать в себя систему телеметрии. Блок 1238 связи может использовать комбинации аппаратуры проводной связи и беспроводной связи на частотах, не создающих помех непрерывным измерениям.
Система 1200 может также включают в себя шину 1217, где шина 1217 создает электрическую связь между компонентами системы 1200. Шина 1217 может включать в себя адресную шину, шину данных и управляющую шину, каждую выполненную в независимой конфигурации или в интегрированном формате. Шину 1217 можно реализовать с использованием ряда различных средств связи, обеспечивающих распределение компонентов системы 1200. Использованием шины 1217 может управлять контроллер 1201.
В различных вариантах осуществления периферийные устройства 1245 могут включать в себя дисплеи, дополнительные сохраняющее данные запоминающее устройство и/или другие устройства управления, которые могут работать в соединении с контроллером 1201 и/или запоминающим устройством 1225. В варианте осуществления контроллер 1201 реализуется как процессор или группа процессоров, которые могут работать независимо, выполняя заданную функцию. Периферийные устройства 1245 могут оснащаться дисплеем как компонентом на поверхности, который может использоваться с инструкциями, сохраняющимися в запоминающем устройстве 1225 для реализации интерфейса пользователя для мониторинга работы зонда 1205 и/или компонентов, распределенных в системе 1200. Интерфейс пользователя может использоваться для ввода значений параметра для порогов, при этом система 1200 может работать автономно, по существу без вмешательства пользователя. Интерфейс пользователя может также обеспечивать переход на ручное управление и изменение управления системой 1200 на управление пользователем. Такой интерфейс пользователя может работать в соединении с блоком 1238 связи и шиной 1217.
На фиг. 13 показан вариант осуществления системы 1300 на буровой площадке, где система 1300 включает в себя зонд 1305, выполненный в конфигурации с таким расположением датчиков, что принимающие датчики устанавливаются отдельно от соответствующих передающих датчиков на расстоянии разделения, достаточно большом для обеспечения обработки в режиме реального времени сигнала, принятого в ответ на переданный сигнал зондирования до достижения граничной поверхности целевой зоны в бурении. Система 1300 включает в себя зонд 1305, имеющий расположение передатчиков и приемников, которое можно реализовать аналогично или идентично расположению, рассмотренному в данном документе, для получения замеров с большим радиусом впереди бурового долота 1326. Зонд 1305 может получать структуру и изготавливаться согласно различным вариантам осуществления, предложенным в данном документе для зонда, имеющего расположение передатчиков и приемников. Например, передающий датчик зонда 1305 может устанавливаться на буровом долоте 1326, а один или несколько приемников - на утяжеленных бурильных трубах 1309 аналогично или идентично расположению передающего датчика 212 на буровом долоте 226 и принимающих датчиков 214-1, 214-2 и 214-3 на утяжеленной бурильной трубе 209 фиг. 2.
Система 1300 может включать в себя буровую установку 1302, установленную на поверхности 1311 на скважине 1306, и бурильную колонну 1308 из бурильных труб, соединенных вместе для образования бурильной колонны, которую спускают через буровой ротор 1307 в ствол скважины или скважину 1312. Буровая установка 1302 может нести бурильную колонну 1308. Бурильная колонна 1308 может работать, проходя через буровой ротор 1307 для бурения скважины 1312 через подземные пласты 1314. Бурильная колонна 1308 может включать в себя бурильные трубы 1319 и компоновку 1320 низа бурильной колонны, установленную снизу на бурильной трубе 1319.
Компоновка 1320 низа бурильной колонны может включать в себя утяжеленную бурильную трубу 1309, зонд 1305, прикрепленный к утяжеленной бурильной трубе 1309, и буровое долото 1326. Буровое долото 1326 может работать, создавая ствол 1312 скважины, проходя через поверхность 1311 и подземные пласты 1314. Зонд 1305 может иметь структуру для применения в стволе скважины в качестве системы измерений во время бурения, такой как система каротажа во время бурения. Кожух, содержащий зонд 1305, может включать в себя электронную аппаратуру для активирования передатчиков зонда 1305 и сбора ответов с приемников зонда 1305. Такая электронная аппаратура может включать в себя блок обработки данных для анализа сигналов, обнаруженных зондом 1305, и передачи результатов измерений на поверхность по стандартному устройству связи для работы в скважине. Альтернативно электронная аппаратура может включать в себя связной интерфейс для передачи сигналов, обнаруженных зондом 1305, на поверхность по стандартному устройству связи для работы в скважине, где данные обнаруженные сигналы можно анализировать в блоке обработки данных на поверхности.
Во время операций бурения бурильную колонну 1308 может вращать буровой ротор 1307. В дополнение к указанному или альтернативно компоновку 1320 низа бурильной колонны может также вращать забойный двигатель (например, гидравлический забойный двигатель), расположенный в скважине.
Утяжеленные бурильные трубы 1309 можно использовать для добавления осевой нагрузки на буровое долото 1326. Утяжеленные бурильные трубы 1309 также могут придавать жесткость компоновке 1320 низа бурильной колонны для обеспечения передачи компоновкой 1320 низа бурильной колонны дополнительной осевой нагрузки на буровое долото 1326 и, в свою очередь, содействия проходке буровым долотом 1326 поверхности 1311 и подземных пластов 1314.
В процессе бурения буровой насос 1332 может перекачивать промывочный раствор (также называемый специалистами в данной области техники "буровым раствором") из емкости 1334 через шланг 1336 в бурильную трубу 1319 и вниз в буровое долото 1326. Буровой раствор может выходить из бурового долота 1326 и возвращаться на поверхность 1311 через кольцевое пространство 1340 между бурильной трубой 1319 и стенками ствола 1312 скважины. Буровой раствор может затем возвращаться в емкость 1334, при этом раствор фильтруется. В некоторых вариантах осуществления буровой раствор может использоваться для охлаждения бурового долота 1326, а также обеспечения смазки бурового долота 1326 в процессе бурения. Кроме того, буровой раствор используется для удаления выбуренной породы 1314, создаваемой при работе бурового долота 1326.
В различных вариантах осуществления в способе используют датчики с большим радиусом исследования для оптимальной посадки скважины в продуктивной зоне с минимальным выходом или без выхода за установленные пределы. Данный способ может минимизировать стоимость и время бурения. Дополнительно таким способом можно удерживать скважину в целевой зоне и можно выполнять глубокие измерения пластовых свойств.
Хотя в данном документе показаны и описаны конкретные варианты осуществления, специалисту в данной области техники должно быть ясно, что любое устройство, по расчетам решающее аналогичные задачи, может заменить устройства, показанные в конкретных вариантах осуществления. В различных вариантах осуществления используются модификации и/или комбинации вариантов осуществления, описанных в данном документе. Следует понимать, что приведенное выше описание является иллюстративным и неограничительным, и что фразеология или терминология, используемая в данном документе, предназначена для описания. Комбинации описанных выше вариантов осуществления и других вариантов осуществления должны стать ясны специалисту в данной области техники после изучения приведенного выше описания.
Изобретение относится к средствам для геонавигации в процессе бурения наклонно-направленных или горизонтальных скважин для разведки нефти и газа. Техническим результатом является повышение точности определения направления скважин в процессе бурения по заданной траектории наклонно-направленных или горизонтальных скважин. Предложен способ геонавигации буровой скважины, содержащий: управление активированием передающего датчика на структуре инструмента, расположенной относительно бурового долота в скважине; прием сигнала в принимающем датчике структуры инструмента в ответ на активирование передающего датчика; обработку сигнала в реальном времени, включающую в себя формирование данных, соответствующих свойствам пласта впереди бурового долота. При этом принимающий датчик установлен отдельно от передающего датчика на расстоянии разделения, достаточно большом для обеспечения обработки сигнала в режиме реального времени, до достижения граничной поверхности целевой зоны. Кроме того обработка данных включает проведение операции инвертирования в отношении принятого сигнала и проверку точности результатов операции инвертирования перед использованием результатов операции инвертирования для геонавигации скважины. Причем геонавигация скважины основана на мониторинге формируемых данных так, что скважина подходит к цели в целевой зоне с минимальным выходом или без выхода за установленные пределы целевой зоны. При этом расстояние разделения является достаточно большим для обнаружения впереди бурового долота на расстоянии более чем от 10 до 200 футов (3-61 м) перед буровым долотом. Кроме того предложены также машиночитаемое запоминающее устройство, система и устройство для осуществления указанного способа, с использованием упомянутого машиночитаемого устройства. 5 н. и 21 з.п. ф-лы, 13 ил.
1. Способ геонавигации буровой скважины, содержащий:
управление активированием передающего датчика на структуре инструмента, расположенной относительно бурового долота в скважине;
прием сигнала в принимающем датчике структуры инструмента в ответ на активирование передающего датчика, причем принимающий датчик установлен отдельно от передающего датчика на расстоянии разделения, достаточно большом для обеспечения обработки сигнала в режиме реального времени, до достижения граничной поверхности целевой зоны;
обработку сигнала в реальном времени, включающую в себя формирование данных, соответствующих свойствам пласта впереди бурового долота, включающую в себя проведение операции инвертирования в отношении принятого сигнала и проверку точности результатов операции инвертирования перед использованием результатов операции инвертирования для геонавигации скважины, причем геонавигация скважины основана на мониторинге формируемых данных так, что скважина подходит к цели в целевой зоне с минимальным выходом или без выхода за установленные пределы целевой зоны, и
причем расстояние разделения является достаточно большим для обнаружения впереди бурового долота на расстоянии более чем от 10 до 200 футов (3-61 м) перед буровым долотом.
2. Способ по п. 1, в котором мониторинг формируемых данных включает в себя сравнение формируемых данных с ранее сформированными данными.
3. Способ по п. 2, в котором геонавигация скважины включает в себя геонавигацию скважины на основе сравнения формируемых данных с ранее сформированными данными.
4. Способ по п. 1, в котором проведение операции инвертирования включает в себя формирование одного или нескольких из следующего: горизонтальное удельное сопротивление слоя пласта, вертикальное удельное сопротивление слоя пласта, расстояние от бурового долота до цели, угол наклона между осевой линией структуры инструмента и нормалью к цели или азимут структуры инструмента относительно цели.
5. Способ по п. 1, в котором проведение операции инвертирования включает в себя формирование методики Левенберга-Маркквардта в отношении полученных сигналов.
6. Способ по п. 1, в котором проведение операции инвертирования включает в себя создание множества значений параметра, что минимизирует погрешность между измеренным напряжением и прямым ответом модели решения прямой задачи.
7. Способ по п. 1, в котором геонавигация скважины включает в себя направление бурения скважины на цель, идентифицированную как целевая плоскость в целевой зоне.
8. Способ по п. 1, в котором геонавигация скважины включает в себя геонавигацию вдоль курса согласно критерию предельного набора угла отклонения.
9. Способ по п. 8, в котором критерий предельного набора угла отклонения включает в себя максимальный угол 10° на 100 футов (31 м).
10. Способ по п. 1, который включает в себя итерационное управление активированием передающего датчика, прием сигнала, соответствующего активированию, и обработку принятого сигнала для идентификации цели или целевой продуктивной зоны.
11. Способ по п. 1, который включает в себя:
повторение управления активированием передающего датчика, получение сигнала, соответствующего активированию, обработку полученного сигнала для создания инвертированных данных и геонавигацию скважины итерационным способом, при этом итерационный способ обеспечивает обнаружение цели или геонавигацию на цель; формирование для следующего получаемого сигнала расчетного значения сигнала в результате обработки последнего обработанного сигнала;
получение следующего сигнала и формирование измеренного значения следующего сигнала; и
если разность между расчетным значением сигнала и измеренным значением сигнала находится в пределах порогового значения, не проводится обработка получаемого следующего сигнала и принимаются инвертированные данные, сформированные из последнего обработанного сигнала как точные данные.
12. Способ по п. 11, в котором формирование для следующего принимаемого сигнала расчетного значения сигнала включает в себя использование модели решения прямой задачи.
13. Способ по п. 12, в котором использование модели решения прямой задачи включает в себя использование модели решения прямой задачи, используемой в операции инвертирования для формирования инвертированных данных из последнего сигнала.
14. Способ по п. 1, который включает в себя:
повторение управления активированием передающего датчика и получения сигнала, соответствующего активированию, на различных каротажных точках во время бурения скважины;
выполнение способа установления достоверности инвертированных данных, сформированных по принятым сигналам, соотнесенным с одной или несколькими из каротажных точек;
добавление в перечень данных цели инвертированных данных, удовлетворительных по способу установления достоверности, или параметров, сформированных из инвертированных данных, удовлетворительных по способу установления достоверности;
ранжирование перечня данных цели; и
геонавигацию к цели на основе ранжированного перечня данных цели.
15. Способ по п. 14, в котором ранжирование перечня данных цели включает в себя сортировку перечня данных цели по времени создания инвертированных данных.
16. Способ по п. 15, в котором сортировка перечня данных цели по времени включает в себя применение весов, при этом более высокие веса применяются к последним на данный момент сформированным инвертированным данным.
17. Способ по п. 14, в котором ранжирование перечня данных цели включает в себя вычисление значений прямых ответов для ряда моделей цели и применение весов согласно разности между значением каждого прямого ответа и значением соответствующего измеренного ответа, при этом чем меньше разность, тем больше присвоенный вес.
18. Способ по п. 14, в котором ранжирование перечня данных цели включает в себя вычисление средних значений инвертированных данных в перечне данных цели и применение весов к инвертированным данным согласно разности между значениями инвертированных данных в перечне данных цели и средними значениями инвертированных данных, при этом чем меньше разность, тем больше присвоенный вес.
19. Способ по п. 14, в котором ранжирование перечня данных цели включает в себя:
сортировку перечня данных цели по времени создания инвертированных данных и применение веса по времени так, что более высокие веса по времени даются последним на данный момент созданным инвертированным данным;
вычисление значений прямых ответов для ряда моделей цели и применение веса по ответу согласно разности между значением каждого прямого ответа и соответствующим значением измеренного ответа, при этом чем меньше разность, тем больше присвоенный вес по ответу;
вычисление средних значений инвертированных данных в перечне данных цели и применение усредненных значений веса к инвертированным данным согласно разности между значениями инвертированных данных в перечне данных цели и средними значениями инвертированных данных, при этом чем меньше разность, тем больше присвоенного веса по усредненному значению; и
добавление веса по времени, веса по значению ответа и веса по усредненному значению для каждого элемента в перечне данных цели для определения модели, по которой осуществляется геонавигация.
20. Способ по п. 14, который включает в себя после достижения цели, имеющей некоторую форму в целевой зоне, следующее:
повторение управления активированием передающего датчика и получение сигнала, соответствующего активированию на различных каротажных точках во время бурения скважины;
выполнение способа установления достоверности инвертированных данных, созданных по принятым сигналам, соотнесенным с одной или несколькими из каротажных точек; и
геонавигацию скважины вдоль форм цели.
21. Машиночитаемое запоминающее устройство с инструкциями, сохраненными на нем, которые при выполнении машиной побуждают машину на выполнение операций способа геонавигации буровой скважины по любому из пп. 1-19.
22. Система для геонавигации буровой скважины, содержащая:
структуру инструмента передающим датчиком и принимающим датчиком, установленными отдельно на расстоянии разделения;
блок управления, выполненный с функциональной возможностью управления формированием передаваемых сигналов передающего датчика и получением принятых сигналов на принимающем датчике, причем каждый принятый сигнал основан на одном из переданных сигналов; и
блок обработки данных, при этом структура инструмента, блок управления и блок обработки данных выполнены с возможностью функционирования по любому из пп. 1-20.
23. Устройство для геонавигации буровой скважины, содержащее:
структуру инструмента, имеющую передающий датчик и принимающий датчик, установленные отдельно на расстоянии разделения, причем расстояние разделения является достаточно большим для обнаружения граничной поверхности целевой зоны с расстояния от граничной поверхности в операции бурения и для обработки данных в реальном времени из собранных принятых сигналов в принимающем датчике в ответ на активирование передающего датчика, причем обработка данных включает в себя проведение операции инвертирования в отношении принятого сигнала и проверку точности результатов операции инвертирования перед использованием результатов операции инвертирования для геонавигации скважины для подхода к цели с минимальным выходом или без выхода за установленные пределы целевой зоны, и
причем расстояние разделения является достаточно большим для обнаружения впереди бурового долота на расстоянии более чем от 10 до 200 футов (3-61 м) перед буровым долотом.
24. Устройство для геонавигации буровой скважины, содержащее:
структуру инструмента, имеющего передающий датчик и принимающий датчик, установленные отдельно на расстоянии разделения;
блок управления, выполненный с функциональной возможностью управления созданием передаваемых сигналов из передающего датчика и сбора принятых сигналов на принимающем датчике, причем каждый принятый сигнал основан на одном из переданных сигналов; и
блок обработки данных, выполненный с функциональной возможностью обработки данных из собранных принятых сигналов для обнаружения цели в целевой зоне для ведения бурения на основе сравнения обработанных данных в отношении выбранного свойства для идентифицирования цели и формирования сигнала для геонавигации бурения для посадки скважины в целевой зоне на основе расстояния разделения, являющегося достаточно большим для обнаружения граничной поверхности целевой зоны с расстояния от граничной поверхности, так что блок обработки данных функционирует в режиме реального времени для обработки данных из собранных принятых сигналов для подхода к цели с минимальным выходом или без выхода за установленные пределы целевой зоны, причем блок обработки данных выполнен с функциональной возможностью проведения операции инвертирования в отношении принятого сигнала и проверки точности результатов операции инвертирования перед использованием результатов операции инвертирования для геонавигации скважины, и
причем расстояние разделения является достаточно большим для обнаружения впереди бурового долота на расстоянии более чем от 10 до 200 футов (3-61 м) перед буровым долотом.
25. Устройство по п. 23 или 24, в котором передающий датчик установлен на буровом долоте.
26. Устройство по п. 23 или 24, в котором передающий датчик и принимающий датчик включает в себя одно или несколько из следующего: катушку, соленоид, кольцевой электрод, дисковый электрод, тороидальный датчик; датчик с изгибающимся чувствительным элементом, магнитострикционный датчик, пьезоэлектрический датчик или их комбинацию.
| US 6088294 A1, 11.07.2000 | |||
| WO 2006053294 A1, 18.05.2006 | |||
| US 6272434 B1, 07.08.2001 | |||
| US 20070236221 A1, 11.10.2007 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ | 2008 |
|
RU2362012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
| Устройство для укладки в ящики бисквитов или галет | 1939 |
|
SU67635A1 |
| СТИВ БРОНЕР и др., Измерения в непосредственной близости от долота | |||
| Новое поколение телеметрических систем/Нефтегозовое обозрение, Весна 1997, том 2, номер 1, с.38-48. | |||

