Изобретение относится к системе, содержащей устройство для розлива напитка и сменный питающий контейнер, содержащий дозатор, при этом система содержит средства для автоматизированного обнаружения наличия сменного питающего контейнера и продукта в сменном питающем контейнере.
Поставщики услуг по снабжению напитками распределяют свои напитки главным образом при помощи автоматизированных устройств в офисах, общественных местах и других местах. Такие устройства для розлива напитка могут включать в себя автоматические кофеварки для приготовления горячих напитков или устройства для выдачи приготовленных из концентрата соков или торговые автоматы для таких продуктов. Облегчение использования этих устройств для розлива напитка является важным не только для потребителя, но также и для поставщика. В процессе снабжения поставщики услуг сталкиваются с проблемой вмешательства человека и максимизации автоматизации с точки зрения затрат, эффективности и уменьшения отказов. Настоящее изобретение обеспечивает получение надежной, простой в использовании, отказоустойчивой и экономичной системы для поддержки автоматизированного процесса выдачи напитков.
Обнаружение питающего контейнера и выдачи в устройстве для выдачи напитка описано в нескольких документах, таких как DE 102008055949 и US 2005/022674. Хотя каждое из средств обнаружения выдачи известного уровня техники приемлемо эффективно, они все требуют существенных усилий, относящихся к датчикам, которые должны быть чувствительными и точными, и включенных электронных систем. Недостаток таких датчиков и электронных систем состоит в том, что они являются относительно дорогостоящими и требуют большого внимания к деталям, не только в том, что они включены в устройства, но также и в отношении питающих контейнеров для продукта, с которыми они должны быть совместимы.
Соответственно, целью настоящего изобретения является предложение усовершенствованной системы для автоматического обнаружения доставки, такого как обнаружение присутствия контейнера (контейнер на месте) и доступности продукта. В более общем смысле целью изобретения является преодоление или смягчение по меньшей мере одного из недостатков известного уровня техники. Также целью настоящего изобретения является получение альтернативных систем, которые менее затрудняют сборку и работу и которые, кроме того, могут производиться относительно недорого.
С этой целью изобретение обеспечивает получение системы, определенной в прилагаемой формуле изобретения. Такое средство обнаружения выдачи обладает тем преимуществом, что оно относительно простое и надежное. Изобретение также предусматривает достоверное и, возможно, также отказоустойчивое распознавание между индивидуальными сигналами, генерируемыми первым и вторым датчиками, когда используется излучатель.
Обнаружение и распознавание
Изобретение обеспечивает автоматизацию обнаружения наличия и содержимого сменных питающих контейнеров в устройствах для розлива напитка. Согласно изобретению может использоваться оптическое обнаружение для автоматизированного обнаружения расположения контейнера и доступности продукта. Преимущество этой системы состоит в том, что нет какого-либо физического контакта между первой и второй поверхностью раздела.
Система
Изобретение обеспечивает получение системы, содержащей устройство для розлива напитка и сменные питающие контейнеры, содержащие дозатор, при этом контейнеры приспособлены для содержания продукта, который будет выдаваться при работе системы.
Средства
Согласно изобретению, используется излучение, такое как свет, для автоматизированного обнаружения и распознавания. Более конкретно, вариант осуществления изобретения может включать в себя несколько источников света и датчиков в комбинации с прозрачными и непрозрачными элементами, являющимися частью дозатора.
Обнаружение контейнера на месте
Излучая свет и измеряя наличие излучаемого света на оптическом датчике, система определяет отсутствие или правильное/неправильное расположение питающего контейнера. Более конкретно, когда свет проникает беспрепятственно, питающий контейнер отсутствует или расположен не должным образом.
Обнаружение доступности продукта
Обнаруживая интенсивность света, проникающего через прозрачные элементы в дозаторе, система опознает уровень наличия продукта в питающем контейнере.
Компоненты для обнаружения контейнера и наличия продукта
Представленные средства для обнаружения выдачи представляют собой два оптических датчика. Прозрачный элемент дозатора расположен между излучателем и первым датчиком. Непрозрачный элемент дозатора расположен между излучателем и вторым датчиком. Эта мера предусматривает отказоустойчивое распознавание между индивидуальными сигналами, генерируемыми первым и вторым датчиками. Примеры излучателей включают в себя инфракрасные (IR) оптические излучатели или светодиоды (LED).
Изобретение может быть приспособлено для проверки того, является ли сигнал, генерируемый первым датчиком, ниже или выше заданного порогового значения. Оно также может быть приспособлено для того, что когда первый датчик обнаруживает излучение выше заданного порогового значения в комбинации со вторым датчиком, по существу не генерирующим сигнала, истекший промежуток времени после активации рассматривается как определяющий, является ли установленный контейнер пустым или полным, но все еще нераскрытым.
Таким образом, полное отсутствие сигнала или неожиданные уровни от по меньшей мере одного из первого и второго датчиков может интерпретироваться как состояние неисправности.
Распределение обнаружения на два датчика обеспечивает получение экономичного, надежного и простого способа обнаружения в противоположность единственному датчику, который должен быть очень точным и поэтому дорог.
Также было обнаружено, что прекращение доступности продукта может быть физически обозначено наличием воздуха в жидком продукте при его выдаче. В системе обнаружения используется изменение показателя преломления между жидкостью и воздухом для увеличения наличия воздуха в жидкости, которая проходит в насос. Таким образом, предпочтительно, чтобы прозрачный элемент дозатора представлял собой оптический элемент таким образом, что требуется только для того, чтобы такой оптический элемент мог быть использован для изменения направления света, падающего на этот оптический элемент. Оптический элемент может иметь любую форму или форму, в которой используется разность показателя преломления жидкости и воздуха. Наличие жидкости в прозрачном элементе дозатора вызывает прохождение света от излучателя в жидкость и обнаружение первым датчиком. Когда воздух присутствует в прозрачном элементе, направление света изменяется. Отраженный свет, предпочтительно, обнаруживается третьим датчиком. Предпочтительно, первый датчик тогда по существу выровнен с излучателем на общей оси, и третий датчик тогда направлен перпендикулярно общей оси. Более предпочтительно, оптический элемент представляет собой призму. Наиболее предпочтительно, призма включает в себя множество граней (71) призмы. Третий датчик может быть датчиком отражения.
В системе используются сменные питающие контейнеры, содержащие жидкие вещества, которые используются для приготовления напитка для пользователя. Жидкое вещество может включать в себя, но не ограничиваясь этим, экстракты кофе, экстракты чая, шоколадные напитки, молоко, вкусовые добавки, соки и/или их концентраты.
Примеры сменных питающих контейнеров представляют собой контейнеры с вкладышем в форме пакета или жесткие контейнеры как описано в документе WO 2011/049446. Пример дозатора описан в документе WO 2011/037464. Весь корпус дозатора может использоваться в качестве второй сопрягаемой поверхности. В качестве альтернативы, только часть дозатора включает в себя вторую сопрягаемую поверхность.
В следующем варианте осуществления изобретения сменный питающий контейнер дополнительно может быть снабжен удаляемым или прокалываемым уплотнением, которое отделяет дозатор от основного корпуса сменного питающего контейнера, который формирует фактический контейнер для жидкостей. Это уплотнение закрывает выходное отверстие фактического контейнера для жидкостей и автоматически пробивается посредством механического прокалывания или выталкивания из удаляемого уплотнения при полном вхождении в контакт дозатора с сопрягаемой поверхностью устройства. Эта система автоматического пробивания описана в интернет-издании http://pdfcast.org/pdf/auto-broaching, опубликованном 12 апреля 2011 г.
В другом варианте осуществления изобретения дозатор и сменный питающий контейнер могут быть двумя отдельными элементами таким образом, что дозатор может соединяться со сменным питающим контейнером.
Система, соответствующая настоящему изобретению, описана относительно использования устройства обнаружения выдачи для одного сменного питающего контейнера, содержащего дозатор. Однако устройство для розлива напитка может содержать больше одного сменного питающего контейнера. Соответственно, система, соответствующая настоящему изобретению, может содержать одно или более средств для автоматического обнаружения в зависимости от количества сменных питающих контейнеров в системе.
Использование определений "по существу прозрачный" и "по существу непрозрачный" не следует рассматривать как ограничивающее настоящее изобретение. Эти использующиеся здесь определения следует понимать как относящиеся к соответствующим возможностям сквозного просмотра, пропускания света и эффективного блокирования пропускания света. В самом широком смысле эти термины означают, что первый элемент в состоянии пропускать больше излучения, чем второй элемент. Другой термин "прозрачный" может означать "полупрозрачный". Другой термин "непрозрачный" может означать "отражающий".
Детализированные объекты и другие преимущества изобретения будут описаны со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - схематический вид конфигурации обнаружения выдачи в соответствии с изобретением с полностью и правильно установленным сменным питающим контейнером, содержащим дозатор;
фиг. 2 - схематический вид сопрягаемой поверхности устройства конфигурации обнаружения со сменным питающим контейнером, содержащим дозатор, который еще не вставлен;
фиг. 3 - схематический вид сопрягаемой поверхности устройства со сменным питающим контейнером, содержащим дозатор, который не полностью вставлен;
фиг. 4 - схематический вид сопрягаемой поверхности устройства с полностью и правильно установленным сменным питающим контейнером, содержащим дозатор;
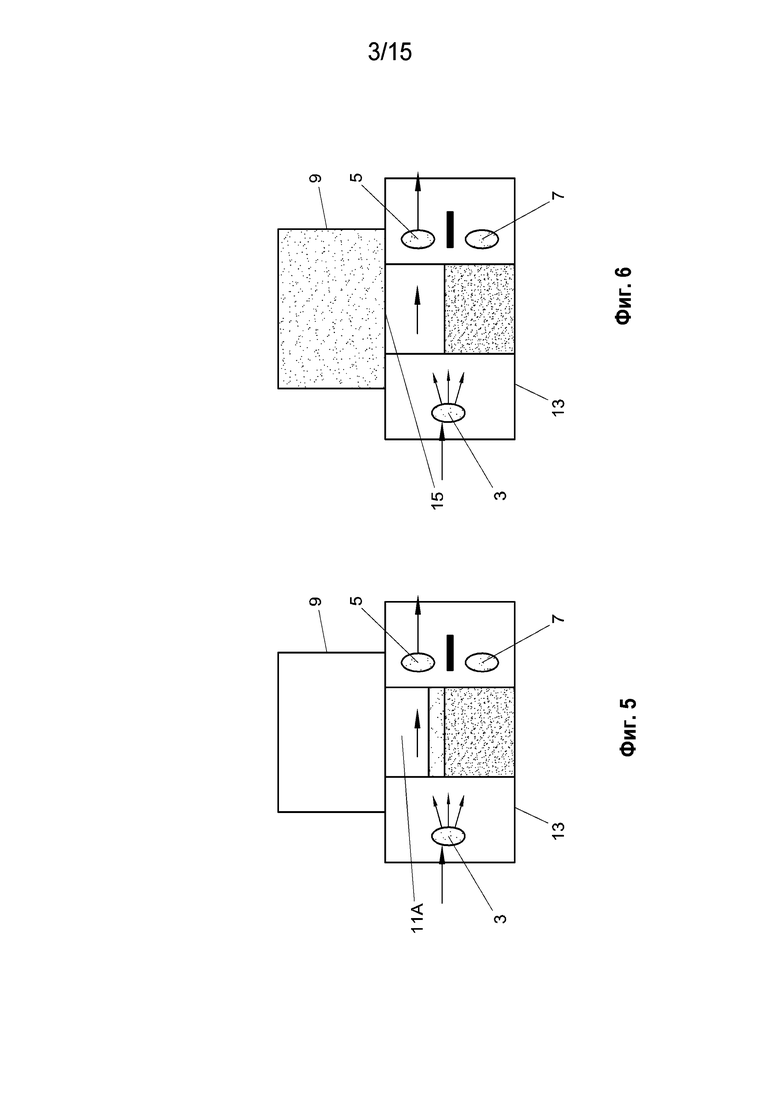
фиг. 5 - схематический вид вставленного сменного питающего контейнера, содержащего дозатор, который пуст или который был опустошен;
фиг. 6 - схематический вид другого варианта осуществления изобретения, который имеет удаляемое уплотнение в сменном питающем контейнере, который не был открыт;
фиг. 7 - схематическое изображение показаний датчика по времени для обнаружения контейнера на месте (PIP) и обнаружения доступности продукта (PAD);
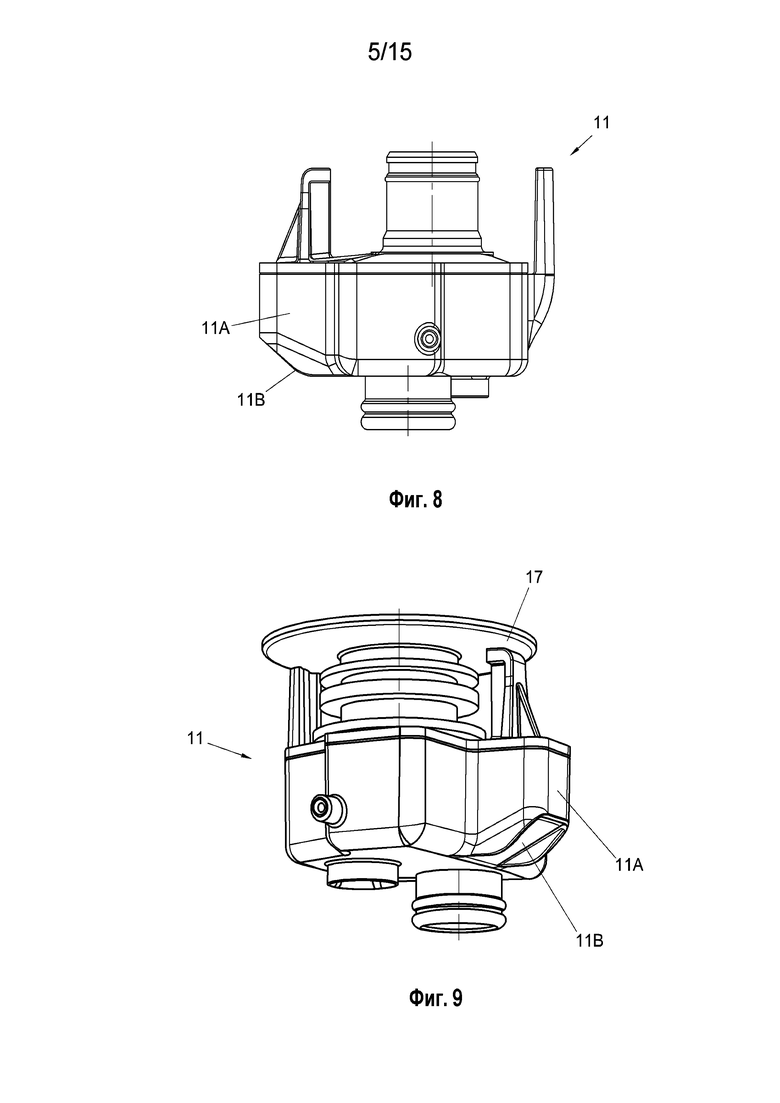
фиг. 8 - вид сбоку альтернативного варианта выполнения настоящего изобретения;
фиг. 9 - вид в перспективе варианта осуществления изобретения, показанного на фиг. 8;
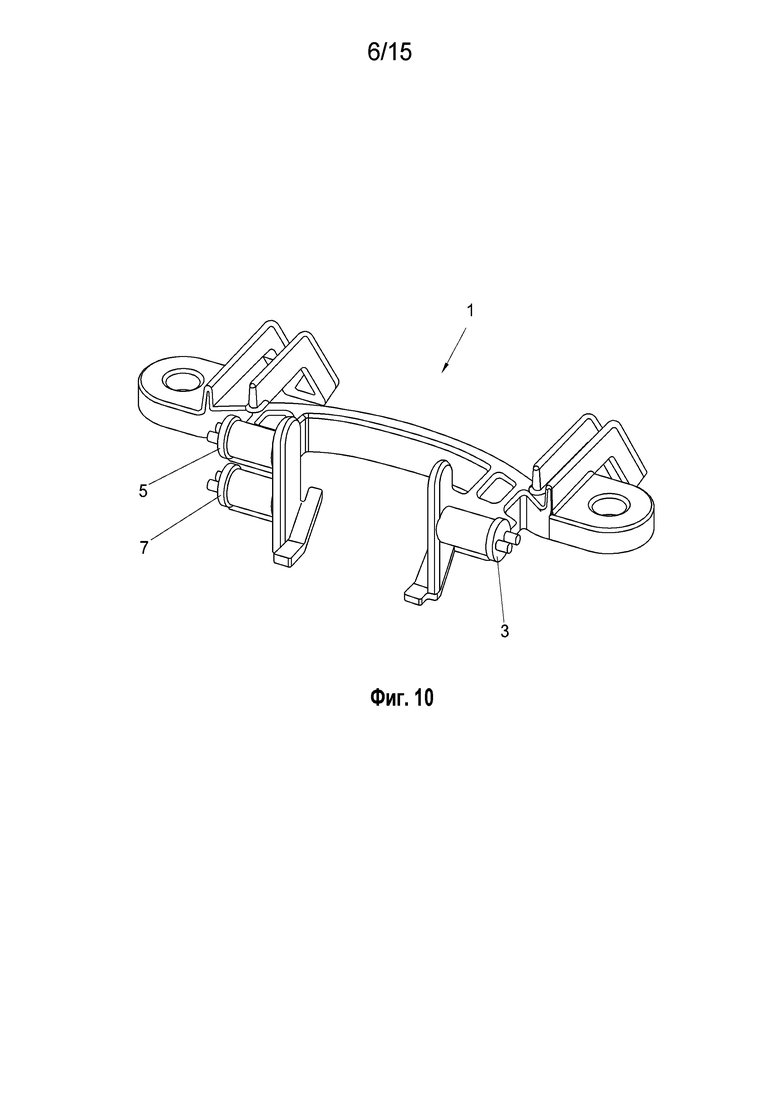
фиг. 10 - вид устройства обнаружения выдачи в соответствии с изобретением;
фиг. 11 - вид в перспективе с пространственным разделением деталей, показывающий основные компоненты альтернативной формы дозатора для системы в соответствии с изобретением;
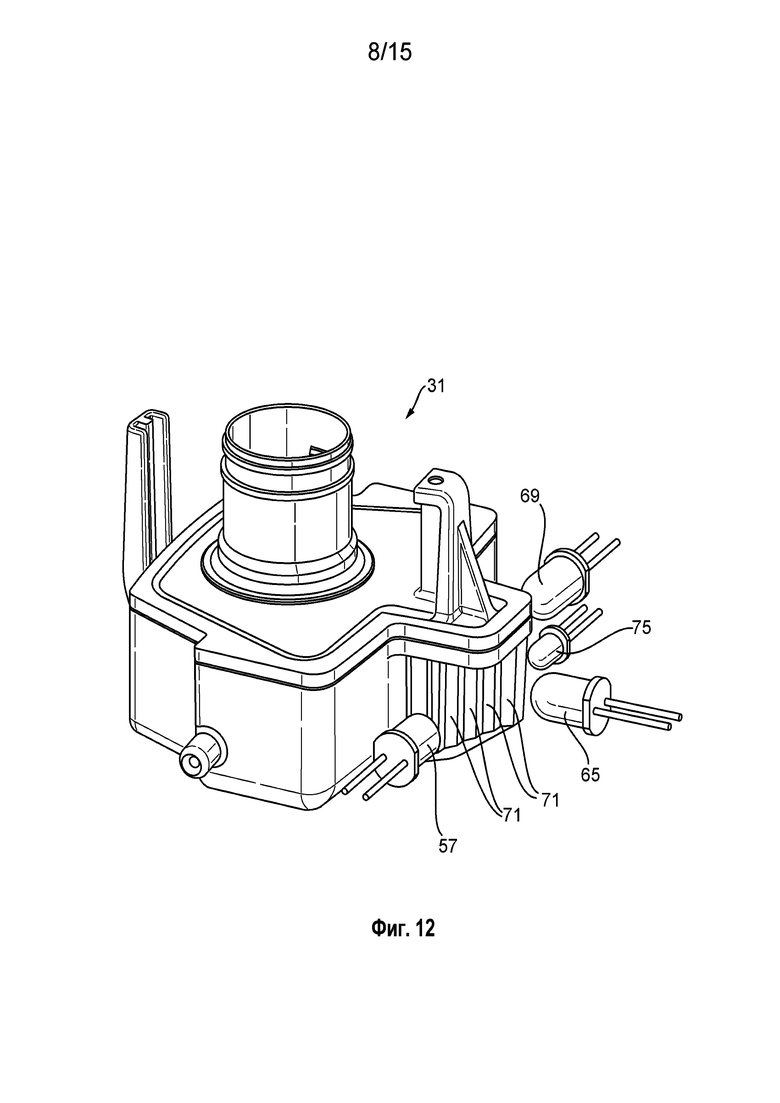
фиг. 12 - вид собранного дозатора, показанного на фиг. 11 с оптическим средством обнаружения, которое является частью устройства розлива напитка;
фиг. 13 - схематическое представление работы призмы с воздухом (A), с водой (B) и подробный вид ступенчатой структуры (C) призмы;
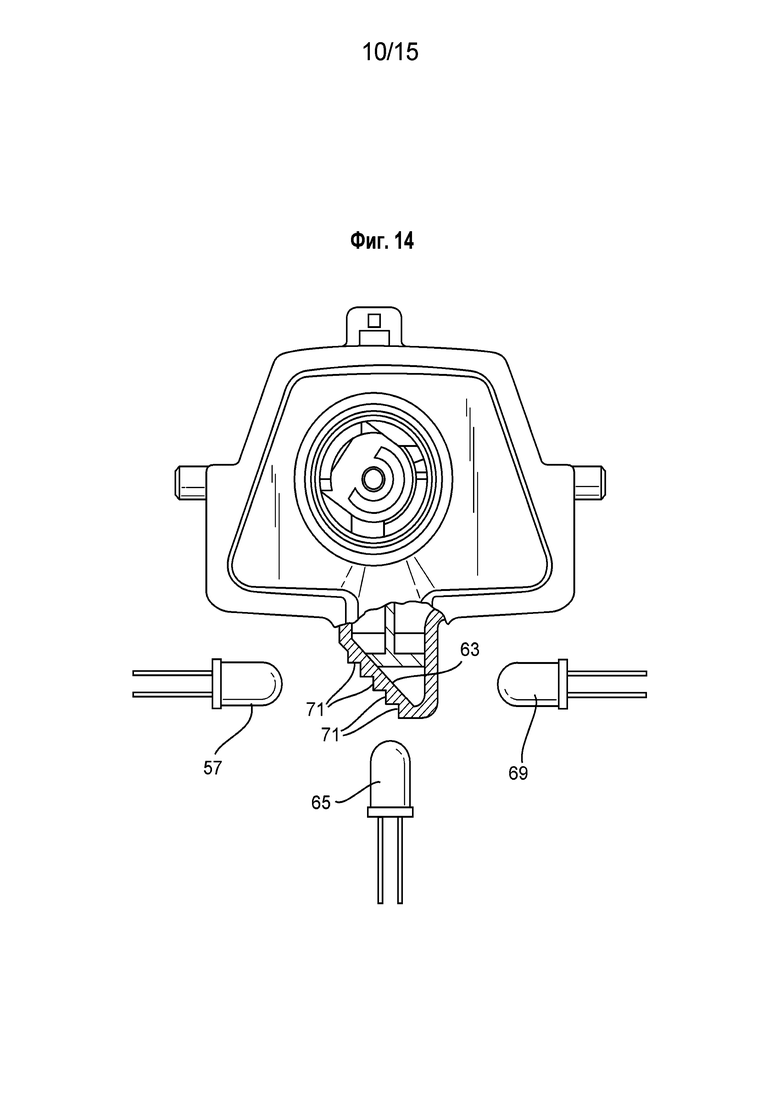
фиг. 14 - общий вид сверху конфигурации оптической системы, показанной на фиг. 12;
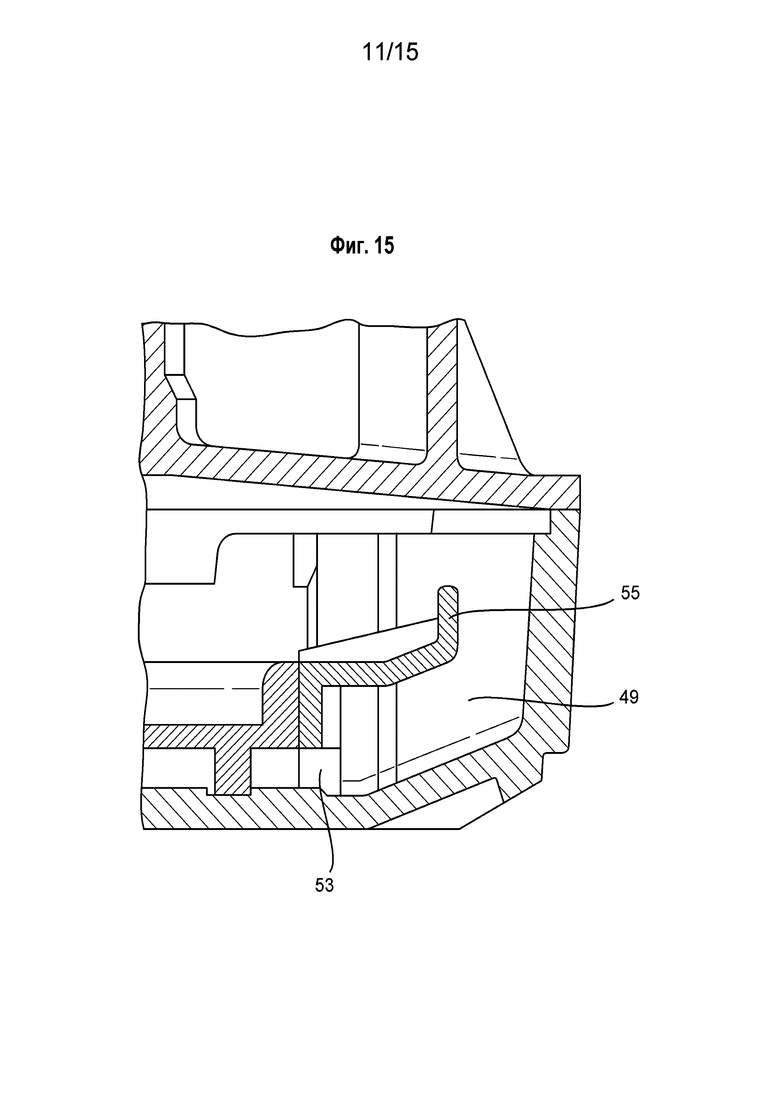
фиг. 15 - подробный увеличенный вид в сечении средства отклонения потока;
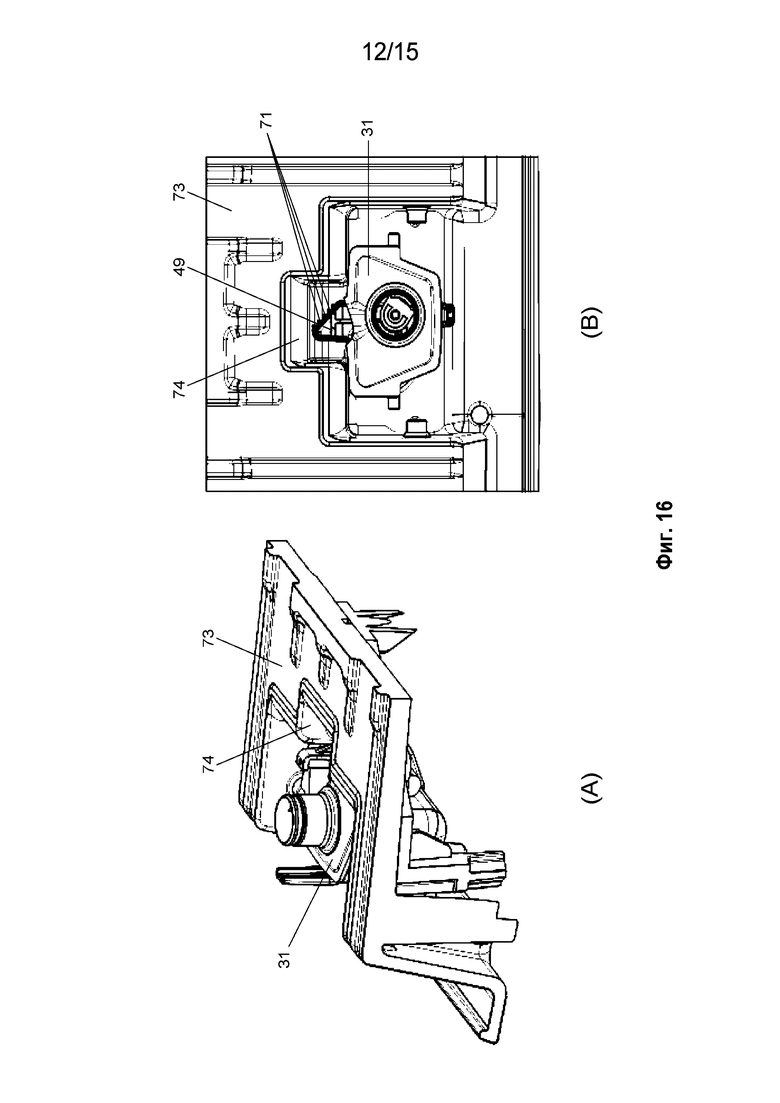
фиг. 16 - вид дозатора без питающего контейнера, вставленный в его исходное положение относительно части устройства для розлива напитка, которая имеет оптический датчик;
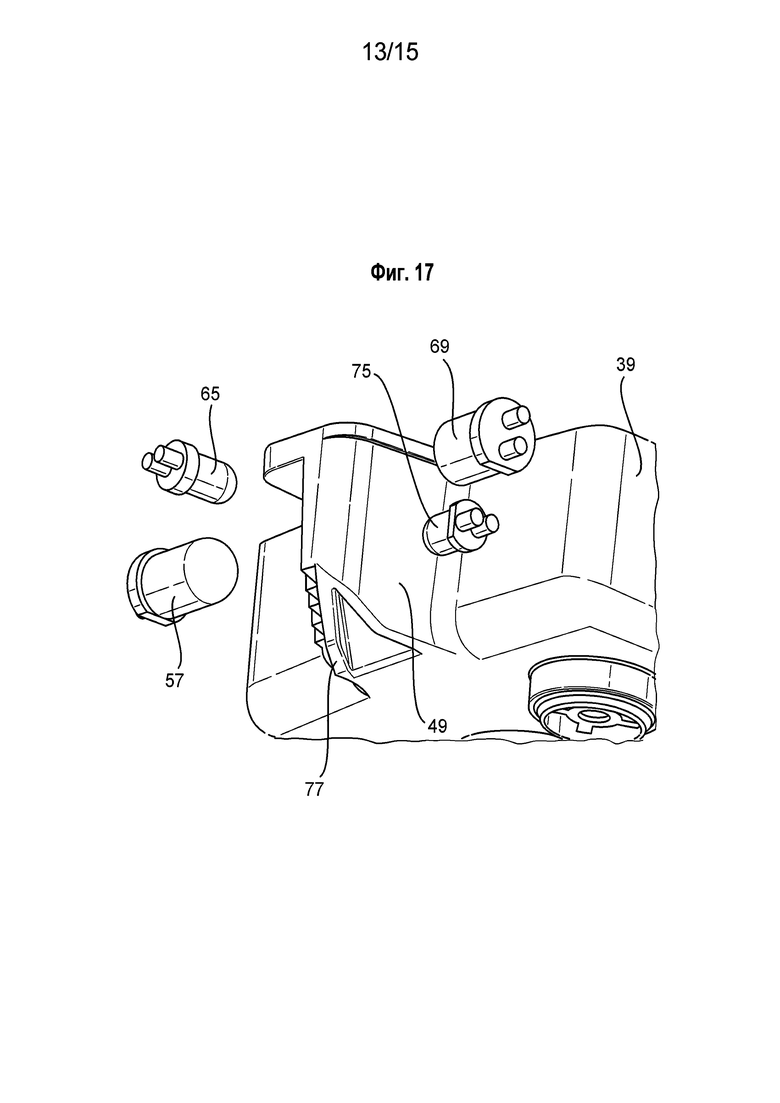
фиг. 17 - частичный подробный вид в перспективе, показывающий щиток обнаружения для обнаружения приближения контейнера;
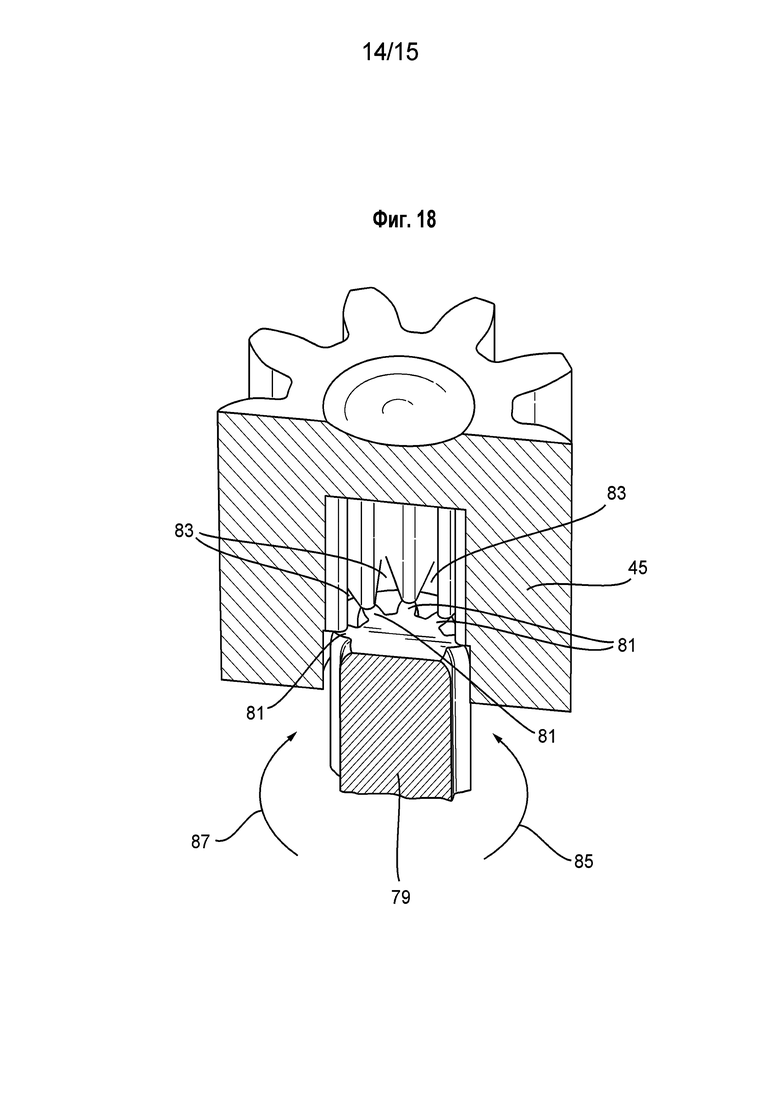
фиг. 18 - частичный вид сечения шестерни перед зацеплением с ведущим валом устройства для розлива напитка;
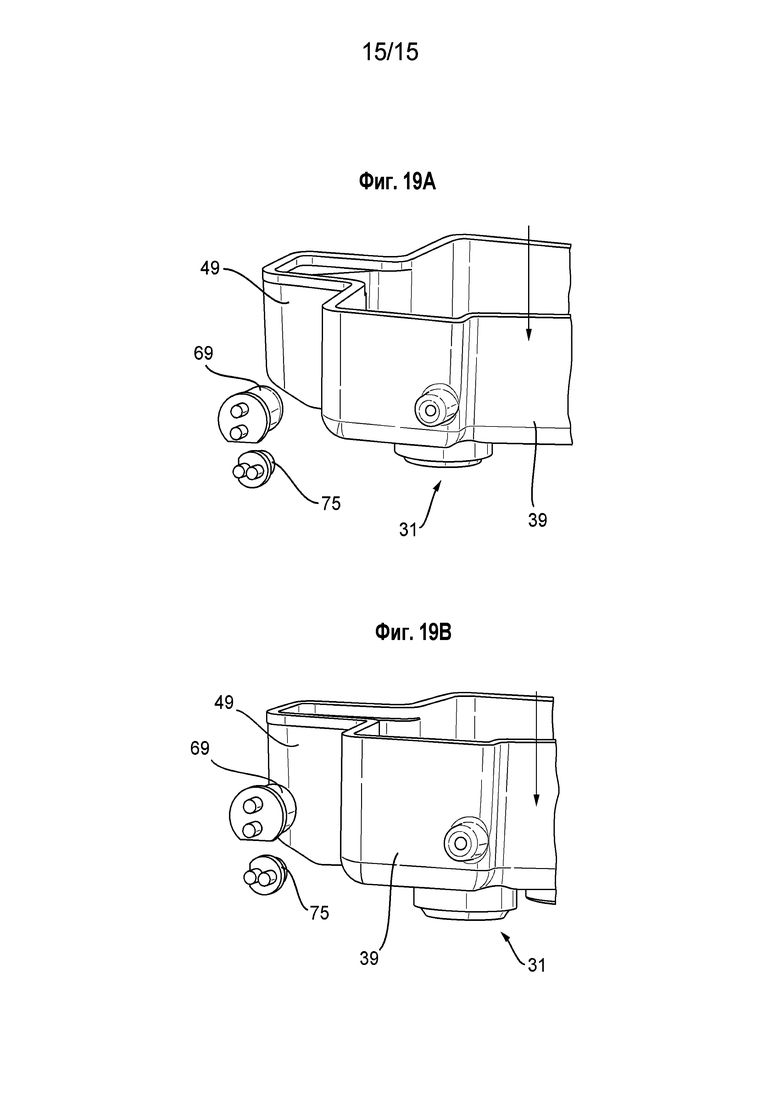
фиг. 19 - схематичный вид снижения дозатора в положение на большем (A) и меньшем (B) расстояниях приближения.
В предпочтительном варианте осуществления настоящего изобретения применяется двойное обнаружение луча света, такого как луч инфракрасного света, излученного одним излучателем, для обнаружения расположения продукта и доступности продукта. Подразумевается, что также могут использоваться излучатели и датчики с другими частотными диапазонами спектра.
Как показано на фиг. 1, соответствующее средство обнаружения может быть инфракрасным средством 1 обнаружения с одним излучателем 3 инфракрасного света и первым и вторым датчиками 5, 7 вместо только одного, как в обычных системах. Первый датчик 5 совместно с излучателем 3 инфракрасного света для обнаружения доступности продукта соответствует испытанной технологии и использовался прежде в системах обнаружения. Второй датчик 7 используется для обнаружения того, находится ли сменный питающий контейнер 9, содержащий дозатор 11, на месте. Устройство 1 обнаружения представляет собой часть системы, которая включает в себя устройство для розлива напитка (не показанное, но обычное) и по меньшей мере один сменный питающий контейнер, содержащий дозатор 11. Такие устройства содержат по меньшей мере одну первую сопрягаемую поверхность или сопрягаемую поверхность 13 устройства для приема по меньшей мере одного сменного питающего контейнера 9 по меньшей мере в одном положении. Дозатор 11 содержит жидкостный соединитель и механизм дозирования, такой как насос (не показан), и действует как вторая сопрягаемая поверхность контейнера.
С конфигурацией в соответствии с фиг. 1 возможны обнаружения, указанные со ссылками на фиг. 2-6. На фиг. 2 и последовательно на фиг. 3-6 изображены стрелки от излучателя 3, и первый и второй датчики 5, 7 схематично указывают активность излучателя или соответствующего датчика.
На фиг. 2 изображена ситуация, в которой полный сменный питающий контейнер 9, содержащий дозатор 11, еще не вставлен между излучателем 3 и первым и вторым датчиками 5 и 7. Каждый из первого и второго датчиков теперь подвергается беспрепятственному облучению от излучателя 3. Это является характеристикой в ситуации, когда контейнер отсутствует. Дозатор 11 действует как вторая или сопрягаемая поверхность контейнера для взаимодействия с первой или сопрягаемой поверхностью 13 устройства.
На фиг. 3 показан полный сменный питающий контейнер 9 таким образом, что дозатор 11 питающего контейнера 9 частично вставлен между излучателем 3 и первым датчиком 5. Дозатор 11 имеет верхнюю часть 11A, которая по существу прозрачна. Дозатор 11 также имеет нижнюю часть 11B. Нижняя часть 11B дозатора 11 по существу непрозрачна. Когда первый датчик 5, как показано на фиг. 3, не обнаруживает излучения от излучателя и когда в то же самое время второй датчик 7 обнаруживает беспрепятственное излучение от излучателя 3, можно определить, что контейнер 9 вставлен неправильно.
На фиг. 4 показан полный контейнер 9, вставленный должным образом, при этом верхняя часть 11A обращена к первому датчику 5, и нижняя часть 11B обращена ко второму датчику 7. В этом случае, контейнер 9 полон и, таким образом, заполнен жидким продуктом. В этом случае, верхняя часть 11A заполнена жидким содержимым контейнера 9. Свет, излучаемый от излучателя 3, обнаруживается первым датчиком 5 через по существу прозрачную верхнюю часть 11A и благодаря полупрозрачности жидкости. Это приводит к выдаче сигнала, генерируемого первым датчиком, который ниже порогового значения, типичного для обнаружения жидкости (доступность продукта). Второй датчик 7 не принимает излучение от излучателя 3 из-за непрозрачности нижней части 11В дозатора 11. Это может интерпретироваться как то, что полный контейнер вставлен должным образом.
На фиг. 5 показана ситуация, подобная показанной на фиг. 4, за исключением того, что здесь контейнер 9 достиг опорожненного состояния. Здесь уровень полупрозрачного жидкого продукта снизился ниже уровня первого датчика 5, который теперь принимает излучение от излучателя 3, которое сталкивается только с прозрачной внешней стенкой верхней части 11A. Это приводит к выдаче другого сигнала, генерируемого первым датчиком 5, который превышает заданное пороговое значение, типичное для пустой верхней части 11A.
В варианте, показанном на фиг. 6, контейнер 9 дополнительно снабжен удаляемым или прокалываемым уплотнением 15, которое отделяет верхнюю часть 11A от основного корпуса контейнера 9, который формирует фактический контейнер для жидкостей. Это уплотнение 15 закрывает выходное отверстие фактического контейнера для жидкостей и автоматически пробивается посредством механического прокалывания или отталкивания удаляемого уплотнения 15 при полном вхождении в контакт дозатора 11 с сопрягающейся поверхностью 13 устройства. Как показано на фиг. 6, удаление уплотнения 15 не было должным образом выполнено, и жидкость, следовательно, не поступила в верхнюю часть 11A. Это приводит к комбинированному считыванию первым и вторым датчиками 5 и 7, которое отличается от значений в ситуации, показанной на фиг. 4, и, следовательно, неуспешное вскрытие контейнера 9 может быть обнаружено. В целом, комбинированное считывание первым и вторым датчиками 5 и 7 подобно считыванию в ситуации с опорожненным контейнером (фиг. 5), но диагноз отсутствия вскрытия может быть отнесен к непосредственно предыдущему действию по вставке контейнера, приводящему к различным изменениями считывания датчиком.
Доступные считывания датчиками указаны в Таблице 1.
Как показано в Таблице 1, существуют двойные условия. Чтобы различить эти условия также можно использовать взаимодействие с дверцей или люком отсека для контейнера устройства. Таким образом, можно с такой закрытой дверцей или с устройством в запущенном состоянии, когда это считывание датчика происходит, задавать условию "не вскрыт" более высокий приоритет. Также можно активизировать устройство для повторения вскрытия уплотнения контейнера, даже когда он уже был вскрыт на более раннем этапе. Когда, например, после истечения двух секунд текучая среда не поступает в камеру дозирования верхней части 11A, генерируется действительное заключение о том, что контейнер 9 пуст.
В качестве альтернативы, диагнозы о невскрытом и пустом контейнере также могут быть отнесены к периоду времени, который истек после того, как устройство было включено последний раз.
Посредством построения графика сигналов первого и второго датчиков 5 и 7 по времени может быть определено, установлен ли контейнер или извлечен. На фиг. 7 схематически показаны считывания датчиком по времени для обнаружения контейнера на месте (PIP) и обнаружения доступности продукта (PAD) и следующий из этого диагноз.
Дополнительным требованием является выполнение указанного выше обнаружения доступности продукта и/или контейнера на месте относительно неправильно установленных контейнеров отказоустойчивым образом. Чтобы сделать обнаружение отказоустойчивым, действительный диапазон обнаружения находится между 0% и 100%, которые являются типичными состояниями отказа подобных датчиков. Соответствующая тестовая программа может предусматривать отключение датчиков или излучателя. Для создания отказоустойчивого пути также предложено, чтобы дозатор не блокировал свет на 100% для обнаружения наличия контейнера, но, только для примера, на 70%. Когда обнаружено блокирование на 100%, то, вероятно, произошло что-то еще, например датчик или излучатель вышли из строя. Примеры даны в Таблице 2, которая также включает в себя типичные состояния отказа датчиков.
Очевидно, что в режиме отказа излучатель больше не пропускает свет или датчик больше не обнаруживает свет, это обнаруживается в системе, когда ослабление света дозирующей частью 1 контейнера составляет, например, 60-70%, а не 100%.
На фиг. 8 и 9 показан альтернативный вариант осуществления изобретения в виде сбоку и в виде в перспективе. Этот вариант осуществления изобретения представляет собой дозатор в соответствии с принципами, описанными в документе WO 2011/0377464. Два необходимых элемента установлены кроме входного и выходного отверстия дозатора, который содержит жидкостный соединитель и механизм дозирования, такой как насос (не показан). Дозатор 11 имеет верхнюю часть 11A, которая по существу прозрачна, и которая заполнена жидким содержимым контейнера 9 (не показано). Дозатор 11 также имеет нижнюю часть 11B. Нижняя часть 11B дозатора 11 по существу непрозрачна. На фиг. 9 показан выпускной канал 17 для соединения дозатора 11 со сменным питающим контейнером. На фиг. 10 показано устройство 1 обнаружения выдачи в соответствии с изобретением, в котором установлен дозатор в соответствии с фиг. 8 и 9. Она ясно показывает излучатель 3 и первый и второй датчики 5, 7.
Альтернативный дозатор 31 показан на фиг. 11. Первый по существу прозрачный элемент 49 можно видеть как выступающий на правой стороне дозатора 31. Ступенчатый/зубчатый элемент 51 представляет собой оптический элемент системы, как будет описано ниже. Дозатор также включает в себя нижний корпус 39, корпус 41 насоса и верхнюю крышку 43. Нижний корпус 39 является основным корпусом насоса дозатора 31A, который расположен в корпусе 41 насоса и является шестеренчатым насосом с парой взаимно зацепляющихся шестерен 45, 47. Одна из шестерен 45, 47 из пары приспособлена для соединения с ведущим валом устройства для розлива напитка.
Корпус 41 насоса образует корпус шестеренчатого насоса и входное и выходное отверстия для насоса. В описанном здесь конкретном варианте осуществления изобретения удлинение 55 канала 53 для потока жидкости можно видеть на правой стороне корпуса 41 насоса. Это удлинение 55 функционирует как устройство отклонения потока. Это устройство 55 отклонения потока обеспечивает то, что продукт, всасываемый в насос, проходит через первый по существу прозрачный элемент, на представленной фигуре, отборную камеру 49 и, следовательно, через поле обзора оптической системы, которая будет описана ниже. Однако следует понимать, что устройство отклонения потока представляет собой дополнительный элемент, несущественный для работы оптической системы.
Верхняя крышка 43 установлена на нижнем корпусе 39. Верхняя крышка 43 используется для прикрепления дозатора 31 к сменному питающему контейнеру (не показан, является обычным).
На фиг. 12 показан дозатор 31, показанный на фиг. 11, в смонтированном состоянии и в положении относительно конфигурации обнаружения. Прекращение доступности продукта (наличия жидкости) в альтернативном варианте выполнения дозатора 31 физически обозначается наличием воздуха в жидком продукте, когда он выдается. Система обнаружения использует изменение показателя преломления между жидкостью и воздухом для увеличения наличия воздуха в жидкости, когда она проходит в насос. Пример этого оптического эффекта схематично показан на фиг. 13.
Свет от внешнего источника 57 света направляется к призме 59, которая является частью отборной камеры 49. Здесь призма 59 действует как оптический элемент, который может быть элементом в любой конфигурации или форме, в которой используется разность показателя преломления текучих сред и воздуха. Требуется только то, чтобы такой оптический элемент мог быть использован для изменения направления света, падающего на этот оптический элемент. Свет от источника 57 света проходит через внешнюю стенку 61, но отражается от внутренней стенки 63, когда воздух находится в отборной камере 49 (см. фиг. 13A). Отраженный свет тогда выходит из призмы 59, где он обнаруживается третьим датчиком, например, датчиком 65 отражения.
Наличие жидкости в отборной камере 49 (см. фиг. 13B) изменяет показатель преломления на внутренней стенке 63, вызывая продолжение движения света вместо его отражения. Свет, исходящий от дальней стенки 67 камеры, обнаруживается первым датчиком, например, датчиком 69 пропускания.
Чтобы понизить стоимость и улучшить возможности производства, твердая призма 59, показанная на схематической фиг. 13 (A и B), заменена рядом из множества меньших граней 71 призмы, показанных на фиг. 13C. В описанном варианте осуществления изобретения грани 71 призмы формируют ступенчатый зубчатый элемент 51 на внешней стороне внутренней стенки 63 отборной камеры 49. В других предполагаемых примерах весь корпус дозатора может использоваться в качестве отборной камеры, и грани призмы могут быть включены в боковую стенку корпуса.
Грани 71 призмы действуют для усиления обнаружения наличия воздуха в отборной камере, переориентируя свет к датчику 65 отражения, когда воздух присутствует на внутренней стенке 63. Другим способом улучшения обнаружения является текущий контроль различных датчиков во время насосного цикла. Обычно такие датчики 65 внутреннего отражения могли использоваться в качестве неподвижного устройства, когда наличие воздуха контролируется только до или после цикла выдачи.
Вязкая и неоднородная природа некоторых жидкостей, особенно жидких кофе, делает такой подход проблематичным. Посредством контроля датчиков 65, 69 отражения и пропускания в то время как насос работает, можно обнаруживать пузыри воздуха, вовлеченные в жидкость. Благодаря точной разработке дозатора 31 можно обеспечивать то, что вовлеченные пузыри проходят через поле обзора датчиков. Другим соображением разработки является обеспечение того, что пузыри увлекаются в контакт с внутренней стенкой 63 каждой из граней 71 призмы. Это и улучшает обнаружение, и действует для очистки внутренних поверхностей, на которых накапливается продукт.
В схематическом примере, описанном выше относительно фиг. 13 (A и B), твердая треугольная призма 59 используется в качестве оптического элемента в системе. Угол внутренней стенки 63 выбран как функция разности показателя преломления воздуха и жидкости, которая будет измерена. Угол определен оптическим анализом. При идеальных условиях с воздухом в отборной камере 49 весь свет отражается к датчику 65 отражения, расположенному под углом 90 градусов к падающему свету. Испытание с различными техниками литья показало, что оптическая рабочая характеристика относительно не подвергается влиянию резкого падения характеристик поверхности. Таким образом, техника обнаружения также может использовать твердую призму. На фиг. 13C показана ступенчатая конструкция призмы с использованием множества граней 71. Практически предпочтительно использовать малый объем пластика. Твердая призма 59 была выполнена с использованием ряда меньших треугольных граней 71. Эти грани 71 формируют ступенчатый признак 51, как показано на фиг. 13C. Снова угол внутренней поверхности или стенки 63 оптимизирован посредством анализа. Размер ступенек является функцией выходного угла источника 57 излучения света и входного угла датчика 65 отражения. Ступеньки 71 граней обычно расположены под углом 90 градусов (но он может быть оптимизирован, если требуется). Окончательно отделанная поверхность должна быть плоской и гладкой для предотвращения поверхностного рассеяния/фокусировки. Анализ показал, что некоторый эскиз одной или обеих поверхностей не оказывает значительного влияния на ее рабочие характеристики. Конструкция является приемлемо терпимой к изменениям из-за производственных допусков.
В настоящем варианте осуществления изобретения устройство 55 отклонения потока в случае необходимости используется для обеспечения правильной работы, когда продукт должен пройти перед системой обнаружения, когда он прокачивается. Устройство 55 отклонения потока было добавлено в канал 53 насоса для обеспечения того, что продукт всасывается через область 49 отборной камеры. Устройство 55 отклонения потока не является несовместимым с существующим размером входного отверстия насоса. Вид сбоку устройства отклонения потока показан на фиг. 15. Устройство 55 отклонения потока обеспечивает получение нескольких преимуществ, заключающихся в том, что:
оно направляет поток продукта и, в частности, воздушные пузыри в положение перед датчиком 65 отражения;
оно расположено на одной оси для обеспечения того, что пузыри воздуха будут прикасаться к внутренней стенке 63 граней 71 призмы;
оно не образует интерференции с полем обзора датчика, поскольку оно позволяет свету проникать прямо через прозрачный пластик устройства 55 отклонения потока через датчик 69 пропускания, таким образом, снижая сигнал до коэффициента шума системы; и/или
оно спроектировано с формой и расположением для достижения указанного выше и обеспечения "моющего" действия относительно внутренней стороны грани призмы посредством направления жидкости в контакт с ней.
Дозатор 31, как указано выше, является частью сменного питающего контейнера, выполненного как контейнер с вкладышем в форме пакета. Контейнер расположен в автоматической кофеварке/выдающем устройстве, где расположена оптическая система обнаружения. Дозатор 31 показан на фиг. 16 в состоянии вхождения в контакт с сопрягающейся частью 73 дозирующего устройства. Таким образом, дозатор 31 действует как сопрягаемая поверхность контейнера. Расположение ручек и других механизмов не показано для упрощения фиг. 16. Оптические компоненты расположены в части 73 сопрягаемой поверхности дозирующего устройства вокруг полости 74 корпуса отборной камеры 49 с ее гранями 71 призмы. При рассмотрении правой фиг. 16B источник 57 света расположен справа от граней 71 призмы, как будет понятно в связи с фиг. 12 и 14. Датчик 65 отражения расположен непосредственно над гранями 71 призмы (как показано на фиг. 16B), в то время как датчик 69 пропускания расположен слева от граней 71 призмы. Другой функцией оптической системы является подтверждение того, что сменный питающий контейнер был должным образом загружен в дозирующее устройство. В этом отношении отдельный датчик 75 обнаружения контейнера на месте (PIP) расположен ниже датчика 69 пропускания слева от граней 71 призмы, как показано на фиг. 12.
Таким образом, дозирующее устройство включает в себя систему обнаружения, как показано на фиг. 12, и содержит ряд предпочтительных элементов, как будет описано ниже. Источник 57 проникающего света для системы обнаружения может быть светодиодом (LED). Для обеспечения максимальной проницаемости сквозь продукт предпочтителен инфракрасный светодиод (длина волны ~880 нм). Однако система также будет работать с другими длинами волны и была также успешно испытана при 650 нм. В целом, пригоден светодиод (LED) с длиной волны в диапазоне от 500 нм до 950 нм, предпочтительно, в пределах диапазона от 650 нм до 880 нм.
Предпочтительная длина волны является функцией характеристик спектрального поглощения света продуктом. Для более обычно используемой проницаемости только типовые системы (для просвечивающего продукта) длина волны будет настроена так, чтобы максимальное затухание было достигнуто, когда продукт присутствует. Как отмечено выше, нарастание продукта на боковых стенках может сделать этот подход проблематичным.
Для предложенной системы обнаружения длина волны выбрана так, чтобы могла быть достигнута максимальная проницаемость. Это позволяет свету, входящему в отборную камеру 49, проникать через любую присутствующую пленку, которая могла бы скрывать находящуюся за ней воздушную полость. Другое преимущество источника инфракрасного света состоит в том, что он не обнаруживается потребителем во время замены контейнера.
Вторым аспектом проникающего светодиода является его угол выходного луча. Освещение боковой стенки отборной камеры 49 источником света с большим углом будет приводить к распространению света в прозрачные пластиковые боковые стенки дозирующего узла 31 и вокруг них. Этот свет может выходить из боковых стенок в различных частях дозатора неконтролируемым образом и может проходить к датчикам довольно неконтролируемым образом. В результате, датчики воспринимают некоторую форму сигнала, когда, фактически, он не должен присутствовать (пониженное отношение сигнала к шуму). Для решения этой проблемы угол выхода светодиода должен быть настолько узким, насколько возможно и, предпочтительно, около +/3 градусов (полная ширина луча на половинной мощности 6 градусов). Увеличение угла выхода, вероятно, приведет к понижению рабочей характеристики из-за неконтролируемого рассеяния света.
Когда воздух присутствует против внутренней стенки 63 граней 71 призмы, будет происходить внутреннее отражение, приводящее к отклонению света от светодиодного источника 57 света на 90 градусов к датчику 65 отражения. Когда пленка продукта присутствует между воздухом и боковой стенкой, будет происходить отражение на границе пленки/воздуха. Хотя некоторое затухание и рассеяние будут происходить в этой граничной зоне пленки/воздуха, рабочие характеристики системы все еще достаточны для обеспечения достоверного указания, что пузыри воздуха проходят через систему. Интервал между внутренней стенкой 63 и устройством 55 отклонения важен для обеспечения того, что воздушный пузырь прилагает достаточную силу к боковой стенке для обеспечения того, что пленка продукта является оптически тонкой.
На фиг. 14 показан подробный вид оптической системы. Датчик 65 отражения выбран таким образом, чтобы он соответствовал длине волны светодиодного источника 57 света. Угол обнаружения должен быть приемлемо широким, чтобы допускать интегрирование сигнала, исходящего от внутренней поверхности 63 призмы. Однако угол приема не должен быть столь широким, чтобы допускать прием рассеянного света от других частей дозатора 31. Рекомендуется угол приема, составляющий 16-24 градуса (соответствующий: от +/-8 до +/-12 градусов на половинной мощности). Для получения оптимальных рабочих характеристик системы светодиодный источник 57 света, датчики 65, 69 отражения и пропускания должны быть выровнены в одной горизонтальной плоскости. Датчик отражения должен быть расположен под углом 90 градусов к оси светодиода (фиг. 12). Точное местоположение датчика в горизонтальной плоскости должно быть оптимизировано. Датчик 69 пропускания принимает любой свет, который проходит через отборную камеру 49, когда жидкий продукт присутствует. Параметры для датчика 69 пропускания подобны параметрам датчика 65 отражения относительно длины волны и угла приема. Здесь также для получения оптимальных характеристик датчик 69 пропускания должен быть расположен на одной оси со светодиодным источником 57 света.
Одновременное обнаружение и отражения, и проницаемости допускает выполнение более детализированной оценки продукта. Например, относительно прозрачные продукты, такие как разбавленный жидкий кофе эспрессо, будут преимущественно обнаружены датчиком 69 пропускания. Такие продукты, как молоко, с высокими свойствами непрозрачности и рассеивания также покажут некоторый сигнал в отражательном датчике 65. Эти вариации характеристик (или динамического или статического состояния) могут позволить различать продукт, содержащийся в сменном питающем контейнере. Это, в свою очередь может позволять потребителю размещать контейнер в любом положении в устройстве для розлива с несколькими питающими контейнерами, которое принимает множество сменных питающих контейнеров. Устройство для розлива тогда может установить тип продукта на основе представленных оптических сигналов.
Без присутствия дозатора 31 в дозирующем устройстве, то есть, в его граничной части 73, датчик 69 пропускания обнаружит выход светодиодного источника 57 света прямо, в то время как датчик 65 отражения вообще не получит сигнал. Это показание датчика может использоваться программным обеспечением автоматической калибровки для контроля изменений максимального уровня сигнала, когда изменение может представлять возможное загрязнение системы.
Наличие пустого дозатора 31 будет приводить к приему датчиком 65 отражения сигнала максимального уровня и датчиком 69 пропускания минимального сигнала. Снова автоматическая калибровка может быть выполнена в этой точке. Это состояние также может использоваться для того, чтобы приступить к последовательности заливки насоса перед пуском.
Когда используемый контейнер расположен в устройстве, оба или любой из датчиков 65, 69 отражения и пропускания будут принимать сигнал пониженного уровня. В этом случае не следует приступать к последовательности заливки насоса перед пуском.
Динамическое измерение представляет собой другой признак системы обнаружения, взаимодействующей с дозатором 31. В известных сенсорных системах доступности продукта используется статическая система измерения. Примером является поплавковый датчик в резервуаре с жидкостью. В таких системах датчик позволяет насосу работать, пока существует достаточное количество жидкости, доступной, для подержания замкнутого состояния поплавкового выключателя. Природа жидкого продукта, используемого в сменном питающем контейнере, соответствующем изобретению, исключает простую статическую систему обнаружения. Между циклами выдачи (которые могут длиться в течение дней) может накапливаться толстая пленка продукта на боковых стенках отборной камеры 49. Это толстое нарастание может затемнить датчик 69 пропускания, что приводит к ложному указанию на доступность продукта.
Динамическая система, выполненная с использованием призмы 59 (то есть, граней 71 призмы), и устройство отклонения потока 55 основаны в основном на обнаружении воздушных пузырей, вовлеченных в продукт. Эти пузыри, проходящие через сенсорную систему, очищают внутреннюю стенку 63 граней 71 призмы, что приводит к получению коротких импульсов света, преломляющегося к датчику 65 отражения. Эти импульсы легко обнаруживаются во время насосного цикла.
Алгоритм динамического измерения исследует сенсорную систему во время насосного цикла и оценивает процентное отношение насосного цикла при содержании воздуха. Регулируемое пороговое значение определяет, когда недопустимое количество воздуха проходит через систему. В этой точке продукт обозначен как больше не являющийся доступным (контейнер опустошен). Дополнительным признаком дозатора 31 является второй по существу непрозрачный элемент 77 для обнаружения качания и наличия контейнера на месте (фиг. 17). Когда контейнер установлен в устройство для розлива, шлицевый ведущий вал 79 привода насоса дозирующего устройства должен входить в зацепление с ведущей шестерней 45 механизма насоса дозатора 31 (фиг. 18). Задача может быть определена тем, что ведомый элемент, такой как шестерня 45 шестеренчатого насоса, должен быть введен в зацепление со шлицевым валом 79, который будет вести шестерню 45. Между ведущим валом 79 и шестерней 45 существует умеренная величина трения. Когда шлицы 81 шлицевого вала 79 не соответствуют сопрягающимся формированиям 83 на шестерне 45, необходимо решение для их выравнивания без повреждения шлицов 81 или сопрягающихся формирований 83 обеих частей. Это зацепление становится более легким, если ведущий вал 79 колеблется назад и вперед приблизительно на +/-40 градусов согласно стрелкам 85, 87, обозначенным на фиг. 18. В соответствии с предложенным решением, датчик 75 обнаружения контейнера на месте определяет, когда ведущая шестерня 45 находится рядом с ведущим валом 79 и когда, в этом случае, ведущий вал 79 немного качается на несколько градусов. Это длится в течение секунды после того, как датчик 75 обнаружения контейнера на месте обнаруживает наличие ведущей шестерни 45 посредством второго по существу непрозрачного элемента, на этой фигуре, выступа 77 обнаружения (фиг. 17). Выбранное решение для упрощения зацепления между ведущим и ведомым элементами 79, 45 эффективно без внимания человека. На фиг. 17 показан выступ 77 обнаружения для обнаружения инициирования приближения и "качания" ведущего вала. Для содействия раннему обнаружению дозатора 31, приближающегося к шлицевому ведущему валу 79 устройства, выступ 77 обнаружения расположен у основания отборной камеры 49. Выступ 77 имеет размеры и расположен для обеспечения того, чтобы свет от светодиодного источника 57 света к датчику 69 проницаемости был затемнен во время снижения прежде, чем шлицевый ведущий вал 79 войдет в зацепление с шестерней 45 дозатора 31. Выступ 77 используется датчиком 75 обнаружения контейнера на месте для обнаружения приближения контейнера. Когда контейнер расположен в дозирующем устройстве, ведущие шлицы 81 ведущего вала 79 дозирующего устройства должны входить в зацепление с шестерней 45 насоса дозатора 31. Это зацепление легче достигается, если ведущий вал 79 вращается назад и вперед на несколько градусов, когда дозатор 31 зацепляется с соответствующими шлицами 81. Это колебательное вращение указано выше как "покачивание".
Другим аспектом светодиодного источника 57 света и датчика 69 пропускания является то, что они должны быть расположены так, чтобы они могли обнаруживать основание отборной камеры 49 дозатора прежде, чем шлицевый вал 79 войдет в зацепление с механизмом насоса. Это обнаружение инициирует колеблющееся действие. Выступ 77 непрозрачен или обработан, чтобы быть непрозрачным и добавлен к основанию отборной камеры 49 для обеспечения того, что датчик 69 пропускания будет обнаруживать корпус в правильной точке в цикле снижения.
Зацепление между шлицевым валом 79 и корпусом 39 дозатора показано на фиг. 18 и 19. Вал 79 входит в контакт с нижней поверхностью дозатора, когда дозатор 31 находится на первом расстоянии (в этом примере) 8,8 мм выше его начального положения. Шлицы 81 на валу 79 входят в зацепление с ведущей шестерней 45 только на втором расстоянии, представляющем конец (в этом примере) 3,9 мм цикла снижения. Покачивание должно начаться между первым и вторым расстояниями. Последовательность зацепления описана более подробно ниже.
На фиг. 18 показано шлицевое зацепление ведущей шестерни 45 насоса дозатора 31, в то время как последующее обнаружение контейнера на месте показано на фиг. 19. В качестве последней проверки готовности системы дополнительный датчик 75 обнаружения контейнера на месте расположен ниже датчика 69 пропускания. Этот датчик активизируется, когда дозатор 31 находится в полностью загруженном исходном положении. Датчик 75 обнаружения контейнера на месте расположен так, чтобы был обнаружен достаточный свет от светодиодного источника 57 света, когда контейнер не находится на месте. Когда он расположен должным образом, выступ 77 на основании отборной камеры 49 будет затемнять датчик 75 обнаружения контейнера на месте, таким образом, обеспечивая указание на то, что контейнер полностью загружен и может работать (см. также фиг. 17).
Как указано выше, датчик 69 пропускания и светодиодный источник 57 света должны находиться на одной оси. Для обеспечения достижения достаточным светом датчика 75 обнаружения контейнера на месте и обеспечения того, что он активизирован в правильном положении, может быть необходимо перемещать датчик 69 пропускания немного от оси. В этом случае должно быть уделено большое внимание обеспечению того, что рабочие характеристики системы обнаружения доступности продукта не подвергаются риску. Рекомендуется оптическое отслеживание луча, сопровождаемое тестированием, для обеспечения того, что система сохраняет желательные рабочие характеристики обнаружения доступности продукта.
Последовательность снижения упаковки с ее дозатором 31, которая используется для вызова покачивания и указания того, что контейнер на месте, показана на фиг. 17-19. На третьем расстоянии (в этом примере) 10 мм над исходным положением свет, проходящий к датчику 69 проницаемости, уже блокируется выступом 77 на отборной камере 49. Как отмечено выше, вал 79 все же должен войти в контакт с корпусом 39 в этой точке.
На фиг. 19 показан дозатор 31, опущенный в положение на третьем расстоянии 10 мм (фиг. 19A) и на четвертом расстоянии (в этом примере) 5 мм (фиг. 19B). На расстоянии приблизительно 5 мм датчик 69 пропускания полностью затемнен, но все еще находится перед вторым расстоянием 3,8 мм зацепления ведущего вала с шестерней 45. Датчик 75 обнаружения контейнера на месте теперь также становится затемненным в этой точке. На пятом расстоянии (в этом примере) 2,5 мм датчик 75 обнаружения контейнера на месте становится полностью затемненным. Ручка для загрузки (не показана и обычная) может удобно быть нагружена пружиной и быть "непостоянно замкнутого типа" и будет содействовать введению дозатора 31 в его полностью опущенное исходное положение.
Хотя в описанных здесь примерах различные датчики были представлены как сенсоры, специалисту будет понятно, что такие датчики могут быть узлами, включающими линзы, световоды, оптические и/или электронные фильтры и т.д. Как также будет понятно специалисту, автоматизированное обнаружение не связано с конкретным шестеренчатым насосом для дозирования жидкости, и другие формы дозирования могут быть скомбинированы с системой обнаружения, соответствующей изобретению.
Соответственно, были описаны средства, которые предназначены для поддержки автоматизированного процесса выдачи напитков. Более конкретно, обнаружение наличия и содержания сменных питающих контейнеров (9) в устройствах для розлива напитка, таким образом, автоматизировано. Обнаружение контейнера на месте обеспечено посредством излучения света и измерения присутствия излучаемого света на одном оптическом датчике (7, 75), при этом система определяет отсутствие или правильное/неправильное расположение питающего контейнера. Обнаружение доступности продукта обеспечено посредством определения интенсивности света, проникающего через прозрачный элемент в питающем контейнере, другим оптическим датчиком (5; 65, 69), при этом система опознает уровень наличия продукта в питающем контейнере.
Предполагается, что работа и конструкция согласно настоящему изобретению будут очевидны из предшествующего описания и прилагаемых к нему чертежей. Специалисту будет ясно, что изобретение не ограничено каким-либо описанным здесь вариантом его осуществления и что возможны модификации, которые следует рассматривать в объеме прилагаемой формулы изобретения. Также предусматриваются кинематические инверсии, входящие в рамки изобретения. В формуле изобретения любые ссылочные позиции не должны рассматриваться как ограничивающие формулу изобретения. Термин "содержащий" и "включающий в себя", использующийся в этом описании или прилагаемой формуле изобретения не следует рассматривать в исключительном или исчерпывающем смысле, а скорее в охватывающем смысле. Таким образом, используемый здесь термин "содержащий" не исключает наличия других элементов или этапов в дополнение к указанным в любом пункте формулы изобретения. Кроме того, форму единственного числа не следует рассматривать как ограничение "только одним", наоборот, она используется в качестве "по меньшей мере один" и не исключает множества. Признаки, которые конкретно или явно не описаны или заявлены, могут быть дополнительно включены в конструкцию согласно изобретению в пределах его объема. Такие выражения, как "средство для…", должны читаться как "компонент, выполненный с возможностью…" или "элемент, сконструированный для…" и должны рассматриваться как включающие эквиваленты описанных конструкций. Использование таких выражений, как "важный", "предпочтительный", "особенно предпочтительный" и т.д., не предполагает ограничения изобретения. Добавления, исключения и модификации в пределах компетенции специалиста могут в целом быть сделаны без отхода от сущности и объема изобретения, определенных формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ОБНАРУЖЕНИЯ В УСТРОЙСТВАХ ДЛЯ РОЗЛИВА НАПИТКА | 2013 |
|
RU2751428C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ОБНАРУЖЕНИЯ В МАШИНАХ ДЛЯ ВЫДАЧИ НАПИТКОВ | 2014 |
|
RU2671090C2 |
| СПОСОБ ВВОДА В ЭКСПЛУАТАЦИЮ СМЕННОГО ПИТАЮЩЕГО БЛОКА В МАШИНЕ ДЛЯ ВЫДАЧИ НАПИТКОВ И СИСТЕМА, СОДЕРЖАЩАЯ СМЕННЫЙ ПИТАЮЩИЙ БЛОК, И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ | 2015 |
|
RU2663383C2 |
| СИСТЕМА ДЛЯ ПРИГОТОВЛЕНИЯ ПОРЦИЙ НАПИТКА | 2014 |
|
RU2667231C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ РОЗЛИВА НАПИТКОВ | 2007 |
|
RU2394465C2 |
| СИСТЕМА МНОГОСТРУЙНОГО ЗАПОЛНЕНИЯ ЕМКОСТЕЙ | 2008 |
|
RU2474531C2 |
| КАПСУЛА, СИСТЕМА И СПОСОБ ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКА ЦЕНТРИФУГИРОВАНИЕМ | 2011 |
|
RU2568082C2 |
| СМЕННЫЙ ПИТАЮЩИЙ БЛОК ДЛЯ МАШИНЫ ДЛЯ ВЫДАЧИ НАПИТКОВ, ДОЗАТОР, НАСОСНЫЙ АГРЕГАТ И СПОСОБ ИЗГОТОВЛЕНИЯ | 2015 |
|
RU2669149C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДЕТЕКТОР УРОВНЯ ЖИДКОСТИ | 2009 |
|
RU2510490C2 |
| ПОДЛОЖКА, КАПСУЛА ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКОВ ЦЕНТРИФУГИРОВАНИЕМ, СИСТЕМА И СПОСОБ ПРИГОТОВЛЕНИЯ НАПИТКА ЦЕНТРИФУГИРОВАНИЕМ | 2011 |
|
RU2578588C2 |





Изобретение относится к средствам для поддержки автоматизированного процесса поставки напитков. Более конкретно, обнаружение наличия и содержимого сменных питающих контейнеров в устройствах для розлива напитка автоматизировано. Обнаружение контейнера на месте обеспечивается посредством излучения света и измерения наличия излучаемого света на одном оптическом датчике, при этом система определяет отсутствие или правильное/неправильное расположение питающего контейнера. Обнаружение доступности продукта обеспечивается посредством определения интенсивности света, проникающего через прозрачный элемент в питающем контейнере, другим оптическим датчиком, при этом система опознает уровень наличия продукта в питающем контейнере. Таким образом достигается получение надежной, отказоустойчивой системы для поддержки автоматизированного процесса выдачи напитков. 25 з.п. ф-лы, 19 ил., 2 табл.
1. Система, содержащая устройство для розлива напитка и по меньшей мере один сменный питающий контейнер, содержащий дозатор и продукт, который будет выдаваться при работе системы, при этом упомянутая система содержит одно или более средств обнаружения для, по меньшей мере, автоматического обнаружения наличия сменного питающего контейнера и продукта в сменном питающем контейнере, при этом упомянутые средства содержат:
первую сопрягаемую поверхность для присоединения к устройству;
вторую сопрягаемую поверхность на дозаторе сменного питающего контейнера, функционально соединяемую с первой сопрягаемой поверхностью;
излучатель на первой сопрягаемой поверхности для испускания излучения;
первый датчик на первой сопрягаемой поверхности для обнаружения наличия продукта в сменном питающем контейнере;
второй датчик на первой сопрягаемой поверхности для обнаружения наличия сменного питающего контейнера; и
причем вторая сопрягаемая поверхность помещается между излучателем и обоими первым и вторым датчиками для препятствия излучению, испускаемому излучателем, при этом вторая сопрягаемая поверхность содержит:
первый по существу прозрачный элемент, который при использовании расположен между излучателем и первым датчиком; и
второй по существу непрозрачный элемент, который при использовании расположен между излучателем и вторым датчиком.
2. Система по п. 1, в которой излучатель представляет собой излучатель инфракрасного (IR) света.
3. Система по п. 1, в котором излучатель представляет собой светодиод (LED).
4. Система по любому из предшествующих пунктов, в которой дозатор имеет верхнюю часть, которая по существу прозрачна и приспособлена для заполнения продуктом, который будет выдаваться, и нижнюю часть, которая по существу непрозрачна.
5. Система по п. 1, дополнительно выполненная с возможностью проверки того, является ли сигнал, генерируемый первым датчиком, ниже или выше заданного порогового значения.
6. Система по п. 5, в которой, когда первый датчик обнаруживает излучение выше заданного порогового значения в комбинации со вторым датчиком, по существу не генерирующим сигнала, истекший промежуток времени после активации рассматривается как определяющий, является ли установленный контейнер пустым или полным, но все еще невскрытым.
7. Система по п. 1, в которой полное отсутствие сигнала от по меньшей мере одного из первого и второго датчиков интерпретируется как состояние неисправности.
8. Система по п. 1, в которой первая сопрягаемая поверхность представляет собой сопрягаемую поверхность устройства и вторая сопрягаемая поверхность представляет собой сопрягаемую поверхность контейнера.
9. Система по п. 1, в которой первый по существу прозрачный элемент включает в себя оптический элемент.
10. Система по п. 9, в которой оптический элемент является призмой.
11. Система по п. 10, в которой призма включает в себя множество граней призмы.
12. Система по п. 1, в которой сопрягаемая поверхность устройства дополнительно включает в себя третий датчик.
13. Система по п. 1, в которой первый датчик по существу выровнен с излучателем на общей оси.
14. Система по п. 12, в которой третий датчик направлен перпендикулярно общей оси и оптический элемент выполнен с возможностью выравнивания и с первым датчиком, и с третьим датчиком.
15. Система по п. 13, в которой третий датчик направлен перпендикулярно общей оси и оптический элемент выполнен с возможностью выравнивания и с первым датчиком, и с третьим датчиком.
16. Система по пп. 12, 13, 14 или 15, в которой третий датчик является датчиком отражения.
17. Система по п. 1, в которой первый по существу прозрачный элемент представляет собой отборную камеру и устройство отклонения потока скомпоновано в пределах отборной камеры таким образом, что устройство отклонения потока выполнено из прозрачного материала, чтобы не блокировать падающий свет, испускаемый от излучателя.
18. Система по п. 1, в которой второй по существу непрозрачный элемент представляет собой непрозрачный выступ, отступающий от основания отборной камеры и расположенный для обеспечения того, что во время установки сменного питающего контейнера излучение излучателя сначала затемняется непрозрачным выступом, прежде чем прозрачная отборная камера будет выровнена с общей осью.
19. Система по п. 1, в которой дозатор включает в себя насос, имеющий ведомую шестерню насоса, и в которой сопрягаемая поверхность устройства имеет ведущий вал для привода шестерни насоса.
20. Система по п. 18, в которой дозатор включает в себя насос, имеющий ведомую шестерню насоса, при этом сопрягаемая поверхность устройства имеет ведущий вал для привода шестерни насоса, и причем обнаружение выступа инициирует вращательное перемещение назад и вперед ведущего вала для содействия зацеплению шестерни насоса с ведущим валом.
21. Система по п. 1, в которой при использовании со сменным питающим контейнером, должным образом соединенным с устройством для розлива напитка, наличие продукта в сменном питающем контейнере обнаруживается динамически во время цикла дозирования продукта из питающего контейнера в устройство для розлива напитка.
22. Система по п. 21, в которой динамический алгоритм измерения выполнен с возможностью оценки величины воздушных пузырей в жидком продукте во время цикла дозирования и решения на основе этой оценки, достиг ли питающий контейнер опорожнения его содержимого.
23. Система по п. 1, в которой излучатель представляет собой светодиод (LED) с длиной волны в диапазоне от 500 нм до 950 нм, предпочтительно от 650 нм до 880 нм.
24. Система по п. 23, в которой излучатель имеет угол выхода, составляющий приблизительно 3 градуса.
25. Система по п. 1, в которой первый датчик имеет угол приема в диапазоне 16-24 градусов.
26. Система по п. 16, в которой третий датчик является датчиком отражения и имеет угол приема в диапазоне 16-24 градусов.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Устройство для зажима стержня руля велосипеда | 1978 |
|
SU779156A1 |
| СПОСОБ РАЗДАЧИ СМЕШАННЫХ ПИЩЕВЫХ ПРОДУКТОВ В ОДНОРАЗОВЫЕ КОНТЕЙНЕРЫ, КОНТЕЙНЕР ДЛЯ СМЕШАННЫХ ПИЩЕВЫХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ СМЕШИВАНИЯ ПИЩЕВЫХ ПРОДУКТОВ | 1998 |
|
RU2218067C2 |
| DE 3240047 A1, 03.05.1984. | |||

