Изобретение относится к пьезотехнике, а более конкретно к датчикам для измерения вибрационных и ударных ускорений сложных технических объектов, работающих в условиях, приближенных к экстремальным механическим перегрузкам, в частности в реактивных двигателях, авиации, ракетостроении, энергетике.
Такие датчики ускорения должны удовлетворять следующим требованиям - измерять ускорение 104-5⋅104 g, иметь рабочие частоты до 10-30 кГц, минимальную чувствительность к воздействию деформации контролируемого объекта в месте крепления акселерометра, малые габариты и массу.
Работа пьезоэлектрических акселерометров основана на использовании прямого пьезоэлектрического эффекта, в результате которого при деформации пьезоэлектрического элемента под воздействием силы инерционного характера генерируется электрический заряд. В различных вариантах конструкций пьезоэлектрических акселерометров используются три типа рабочей деформации пьезоэлектрического элемента - растяжения-сжатия, изгиба или сдвига. Для экстремальных условий эксплуатации наиболее предпочтительными являются пьезоэлектрические акселерометры с рабочей деформацией типа растяжения-сжатия, отличающиеся высокой резонансной частотой, большой прочностью к механическим перегрузкам и меньшем коэффициентом смещения нулевой линии (дрейфа нуля).
Известны пьезоэлектрические акселерометры, работающие по механической схеме продольного растяжения-сжатия, которые содержат основание для крепления на контролируемом объекте, инерционный элемент (массу) и расположенный между ними пьезоэлектрический элемент, состоящий, по крайней мере, из одного пьезоактивного слоя с параллельным относительно оси чувствительности направлением поляризации (RU 2400760, G01P 15/09, опубликован 27.09.2010) [1], (RU 2402019, G01P 15/09, 20.10.2010) [2]. Ускорение контролируемого объекта передается акселерометру, при этом масса инерционного элемента вызывает деформацию пьезоэлемента, на электродах которого возникает электрический сигнал, пропорциональный мгновенному значению ускорения. Рабочий диапазон частот акселерометра в 3-5 раз меньше резонансной частоты закрепленного акселерометра, которая зависит от массы инерционного элемента, коэффициентов упругости пьезоэлемента и основания (Янчич В.В. Пьезоэлектрическое приборостроение, том VII. Пьезоэлектрические виброизмерительные преобразователи (акселерометры). Ростов-на-Дону: Изд-во ЮФУ, 2010. - 304 с., стр. 68-70) [3].
Недостатком известных пьезоэлектрических акселерометров является чувствительность к деформациям контролируемого объекта, которые передаются через основание пьезоэлектрическому элементу и вызывают возникновение паразитного электрического заряда, что приводит к искажению выходного сигнала и снижению точности и достоверности измерений. Для ослабления чувствительности к деформации рекомендуется увеличить расстояние от чувствительного элемента до установочной поверхности или дополнительно к этому использовать основание специальной сложной конфигурации (см. стр. 93 в кн.: Ж. Аш с соавторами. Датчики измерительных систем: В 2-х книгах. Кн. 2. Пер. с франц. - М.: Мир, 1992. - 424 с., книга 2, с. 92-93) [4], (RU 513313, G01P 15/08, опубл. 05.05.1976) [5], что приводит к увеличению массы и габаритов акселерометра.
Известен пьезоэлектрический акселерометр, работающий на деформации растяжения-сжатия (SU 1561045 A1, G01P 15/09, опубликовано 30.04.90) [6], в котором сделана попытка ослабления чувствительности к деформации контролируемого объекта. Пьезоэлектрический акселерометр содержит основание, инерционную массу и расположенный между ними пьезоэлемент с продольным относительно оси чувствительности направлением поляризации. Основание выполнено из двух металлических накладок, между которыми размещена изолирующая шайба. Все элементы акселерометра стянуты резьбовой шпилькой, а накладки выполняют роль токосъемных электродов. При наличии ударных или знакопеременных ускорений пьезоэлемент, нагруженный инерционной массой, испытывает механические деформации, а возникающий при этом в результате прямого пьезоэффекта электрический заряд пропорционален ускорению контролируемого объекта. Уменьшение влияния на чувствительный элемент деформации со стороны контролируемого объекта достигается выполнением изолирующей шайбы из волокнистого материала, у которого модуль упругости меньше модуля упругости сопрягаемых элементов основания. Это приводит к уменьшению механических напряжений, передаваемых пьезоэлементу, и повышению точности измерений благодаря ослаблению сигнала помехи, вызываемого воздействием на чувствительный элемент деформаций контролируемого объекта в месте крепления акселерометра.
Недостатками известного акселерометра являются:
- наличие изолирующей шайбы с низким модулем упругости приводит к снижению продольной жесткости основания акселерометра и, следовательно, к снижению его резонансной частоты и уменьшению верхней границы рабочего диапазона частот;
- сложность конструкции основания, которое выполнено из трех отличающихся по форме и материалу элементов;
- необходимость увеличения высоты элементов основания акселерометра для обеспечения достаточной изгибной жесткости приводит к увеличению габаритов акселерометра.
Следовательно, в известном устройстве повышение точности измерений за счет снижения влияния деформаций контролируемого объекта неизбежно приводит к снижению верхней границы рабочего диапазона частот, усложнению конструкции и увеличению габаритов акселерометра.
Задача ослабления чувствительности к деформации за счет увеличения расстояния от чувствительного элемента до установочной поверхности путем увеличения высоты основания и выполнения его из материала с высокой жесткостью решена в классической конструкции пьезоэлектрического акселерометра (CN 203561647 (U) 2014-04-23, МПК: G01P 15/09, 2014-04-23) [7], принятого за прототип заявляемого изобретения.
Пьезоэлектрический акселерометр - прототип с рабочей деформацией типа растяжения-сжатия содержит корпус, основание и инерционный элемент, между которыми расположены рабочий двухслойный пьезоэлектрический элемент, выполненный в форме диска с центральным осевым отверстием и электродами на плоских поверхностях (торцах), слои имеют встречное направление поляризации вдоль продольной оси и электрически соединены параллельно. Между слоями расположена тонкая металлическая прокладка для присоединения выводов. Все элементы конструкции механически жестко связаны между собой и стянуты через пружину посредством резьбовой шпильки и гайки.
Увеличение высоты основания приводит к увеличению массы и габаритов акселерометра, снижению резонансной частоты и, следовательно, верхней границы рабочего диапазона частот.
Техническим результатом настоящего изобретения является снижение чувствительности пьезоэлектрического акселерометра к деформации контролируемого объекта при уменьшении габаритов, повышении резонансной частоты и увеличении верхней границы рабочего диапазона частот.
Указанный технический результат достигается тем, что пьезоэлектрический акселерометр содержит сжатые в пакет резьбовой шпилькой металлическое основание и расположенные на нем диэлектрическую прокладку, компенсационный пьезоэлектрический элемент с электродами на торцах и радиальным направлением поляризации от периферии к центральной оси акселерометра, параллельным плоскостям электродов, рабочий пьезоэлектрический элемент с электродами на торцах и осевым направлением поляризации в сторону основания, перпендикулярным плоскостям электродов, инерционный элемент, причем сопрягаемые электроды компенсационного и рабочего пьезоэлектрических элементов соединены между собой и с изолированным от основания выводом акселерометра, другой электрод рабочего пьезоэлектрического элемента имеет электрический контакт с инерционным элементом и основанием, а свободный электрод компенсационного пьезоэлектрического элемента подключен к основанию и другому выводу акселерометра через электрическую емкость, образованную диэлектрической прокладкой, соприкасающейся с металлической поверхностью инерционного элемента и свободным электродом компенсационного пьезоэлектрического элемента.
В предпочтительном исполнении пьезоэлектрического акселерометра диэлектрическая прокладка выполнена из сегнетоэлектрической керамики, имеющей значение диэлектрической проницаемости, в 10-20 раз меньшее, чем материал компенсационного пьезоэлектрического элемента.
Выполнение компенсационного пьезоэлектрического элемента с поперечным радиальным направлением поляризации, установленного на диэлектрической прокладке, позволяет преобразовать механические напряжения, возникающие в основании вследствие его деформации, в пропорциональный электрический сигнал (заряд или напряжение). При указанном электрическом включении пьезоэлектрических элементов вместо частичного ослабления механических напряжений (как у прототипа) становится возможной активная компенсация сигнала помехи, вызванной деформацией контролируемого объекта.
Выполнение диэлектрической прокладки из сегнетоэлектрической керамики, имеющей диэлектрическую проницаемость, в 10-20 раз меньшую, чем материала компенсационного пьезоэлектрического элемента, обеспечивает значение электрической емкости в электрической цепи, при которой происходит выравнивание электрических зарядов на пьезоэлементах, необходимое для компенсации сигнала помехи от деформации основания.
Изобретение поясняется чертежами.
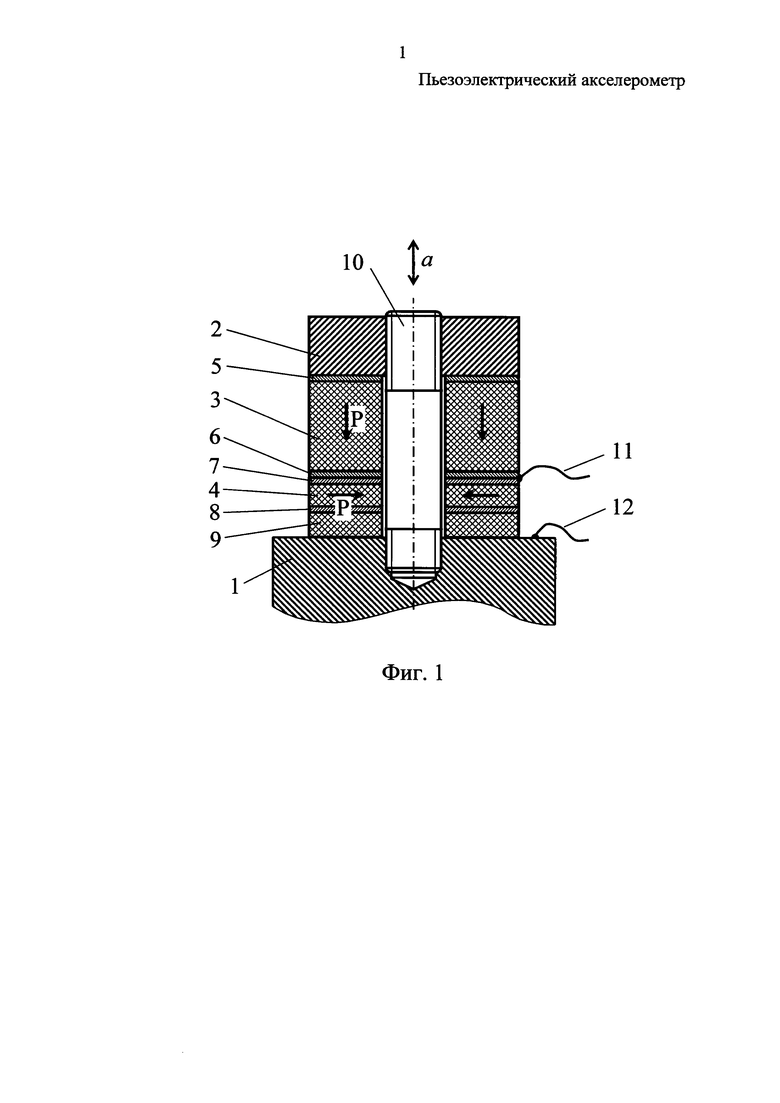
Фиг. 1 - конструкция пьезоэлектрического акселерометра, продольное сечение, где а - направление измеряемого ускорения; Р - направление вектора поляризации пьезоэлектрических элементов.
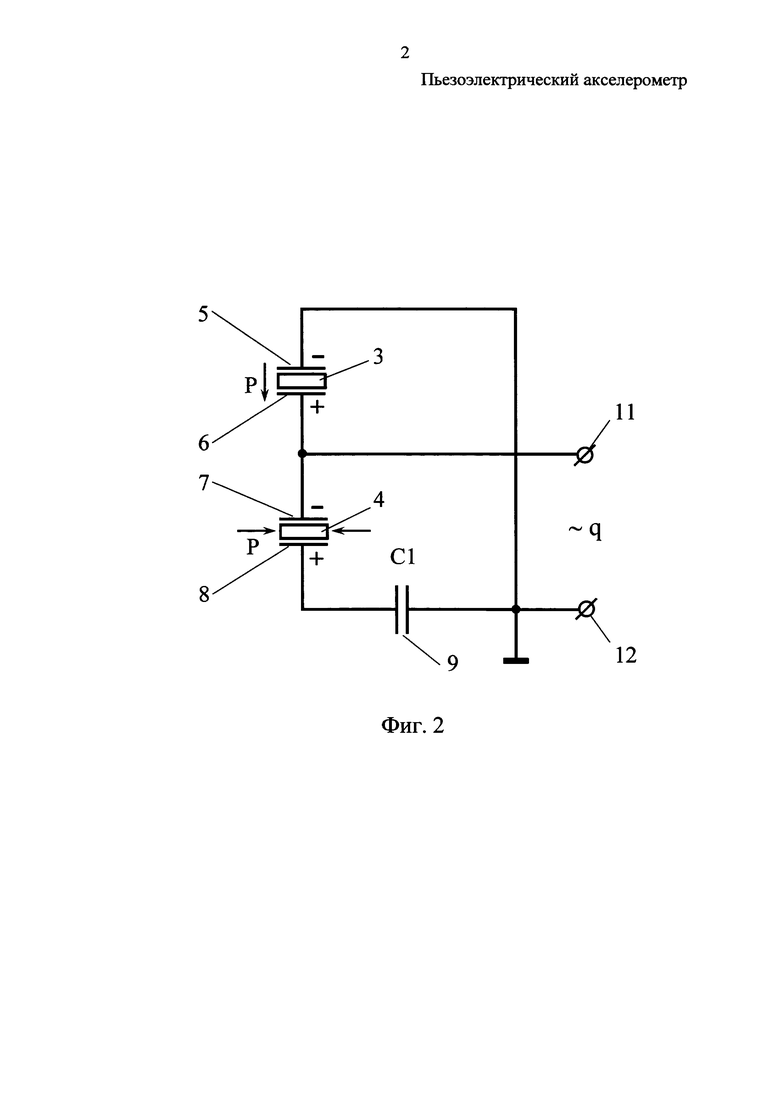
Фиг. 2 - электрическая схема пьезоэлектрического акселерометра, где Р - направление вектора поляризации пьезоэлектрических элементов, q - заряд на выходе акселерометра.
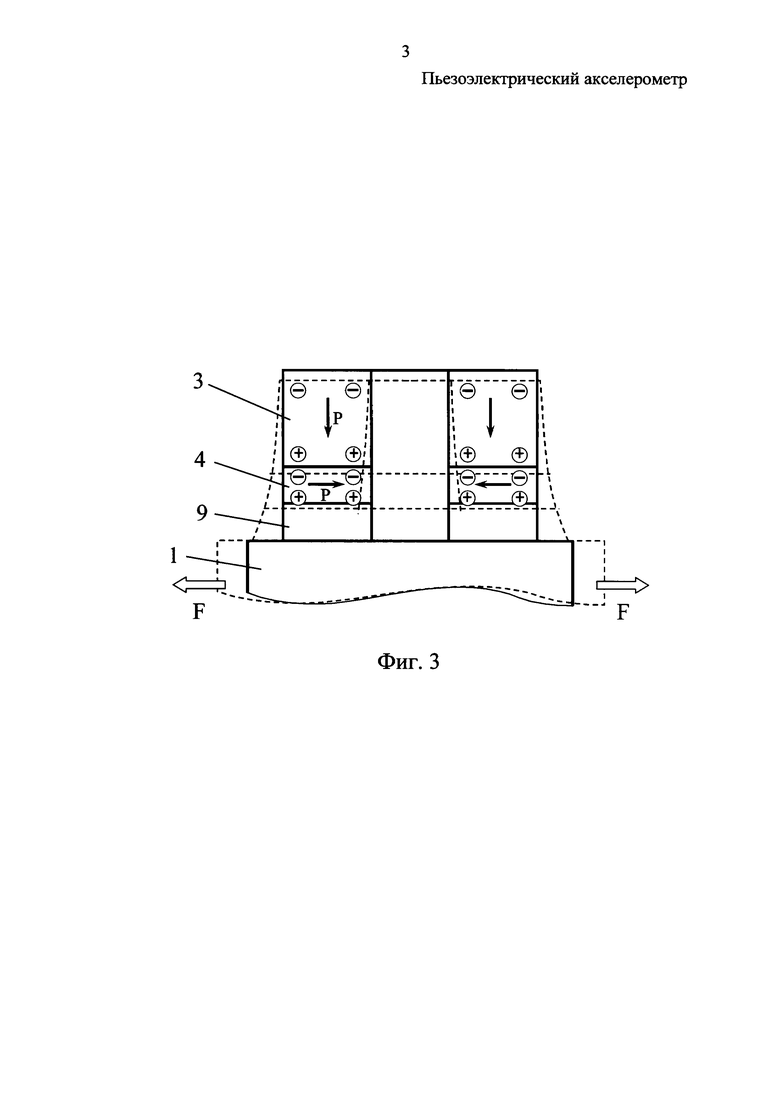
Фиг. 3 - схема механизма компенсации влияния деформации основания, где штриховыми линиями изображен характер деформации элементов акселерометра при поперечном растяжении основания силой F, действующей при деформации со стороны контролируемого объекта; Р - направление вектора поляризации пьезоэлектрических элементов.
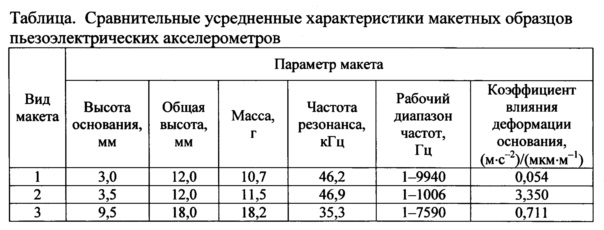
Таблица. Сравнительные усредненные характеристики макетных образцов пьезоэлектрических акселерометров. (См.ниже.)
Пьезоэлектрический акселерометр (фиг. 1) содержит металлическое основание 1, инерционный элемент 2, расположенные между ними рабочий пьезоэлектрический элемент 3 и компенсационный пьезоэлектрический элемент 4, выполненные в форме диска с центральным осевым отверстием. На торцах рабочего пьезоэлектрического элемента 3 нанесены электроды 5, 6, а на торцах компенсационного пьезоэлектрического элемента 4 нанесены электроды 7, 8. Рабочий пьезоэлектрический элемент 3 имеет направление поляризации Р, перпендикулярное плоскостям электродов 5, 6, а компенсационный пьезоэлектрический элемент 4 имеет радиальное направление поляризации Р относительно центральной оси акселерометра, параллельное плоскостям электродов 7, 8. Пьезоэлементы 3, 4 через диэлектрическую прокладку 9 упруго поджаты к основанию 1 через инерционный элемент 2 резьбовой шпилькой 10. Диэлектрическая прокладка 9, электрод 8 и поверхность металлического основания 1 образуют конденсатор с электрической емкостью С1.
Электроды 6, 7 (фиг. 2) соединены между собой и с выводом 11 пьезоэлектрического акселерометра. Электрод 5 соединен с выводом 12, а электрод 8 соединен через электрическую емкость С1 диэлектрической прокладки 9 с основанием 1 и выводом 12.
Основание 1 пьезоэлектрического акселерометра жестко закрепляют на поверхности контролируемого объекта. Работа пьезоэлектрического акселерометра основана на прямом пьезоэлектрическом эффекте. При воздействии на акселерометр вдоль его продольной оси измеряемого вибрационного или ударного ускорения пьезоэлектрическим элементам 3 и 4 от инерционного элемента 2 передается усилие, которое вызывает их осевую деформацию растяжения-сжатия.
Как следует из матрицы пьезомодулей большинства пьезокерамических материалов, при продольной деформации вдоль направления вектора поляризации Р за счет пьезомодуля d33 на электродах рабочего пьезоэлектрического элемента 3 возникает электрический заряд, пропорциональный значению ускорения (полезный сигнал), который может быть увеличен за счет нечетного количества слоев, электрически включенных между собой параллельно. На электродах компенсационного пьезоэлектрического элемента 4, способного генерировать заряд за счет пьезомодуля d15 только при деформации сдвига в радиальном направлении, электрический заряд не возникает.
Деформация контролируемого объекта в месте размещения акселерометра передается основанию 1 и через диэлектрическую прокладку 9 вызывает деформацию пьезоэлектрических элементов 3, 4 с поперечной и сдвиговой составляющими соответственно (фиг. 3). При этом поперечная составляющая деформации за счет пьезомодуля d31 вызывает возникновение электрического заряда только на пьезоэлектрическом элементе 3 (сигнала помехи), а сдвиговая составляющая деформации за счет пьезомодуля d15 приводит к возникновению электрического заряда только на пьезоэлектрическом элементе 4, который используется для компенсации сигнала помехи, обусловленного деформацией контролируемого объекта.
При деформации основания 1 в случае направлений поляризации пьезоэлектрических элементов 3, 4, как показано на фиг. 1, заряды на электродах 6, 7 и электродах 5, 8 будут иметь противоположные знаки (фиг. 2). Так как электрический заряд на пьезоэлементе 4 будет больше, чем электрический заряд на пьезоэлементе 3, более удаленном от основания 1, то для выравнивания зарядов на них последовательно с пьезоэлементом 4 включена емкость С1, которая уменьшает электрический заряд с пьезоэлемента 4. Таким образом, выполняется условие компенсации сигнала помехи от деформации основания 1, заключающееся в равенстве значений электрических зарядов при противоположной полярности.
Для рассмотрения осуществимости и эффективности работы заявленного устройства изготовлены три вида макетных образцов пьезоэлектрических акселерометров в трех экземплярах каждый. Для изготовления макетных образцов были выбраны пьезоэлектрические и конструкционные материалы, наиболее характерные для изготовления отечественных пьезоэлектрических датчиков.
Конструкция макетного образца первого вида соответствует заявляемому изобретению (фиг. 1), который содержит основание 1 диаметром 14 мм, высотой 3 мм из стали 25X13H2, резьбовую шпильку 10 диаметром 3 мм из стали 12Х18Н10Т, инерционный элемент 2 диаметром 5 мм, высотой 3 мм из сплава ВНМ3-2 с плотностью 17,6 г/см3, пьезоэлектрические элементы 3, 4 диаметром 5 мм высотой 5 и 0,5 мм соответственно, с напыленными серебряными электродами 5-8, диэлектрическую прокладку 9 диаметром 10 мм, высотой 0,5 мм из неполяризованной сегнетоэлектрической керамики ТНВ-1 с относительной диэлектрической проницаемостью 105. Пьезоэлементы 3, 4 выполнены из пьезоэлектрической керамики ЦТС-83 с пьезомодулями d31=155 пКл/Н, d33=300 пКл/Н, d15=300 пКл/Н и относительной диэлектрической проницаемостью 1400.
Поляризация пьезоэлектрического элемента 3 в продольном направлении осуществлялась при температуре 250°C подачей на его электроды 5, 6 постоянного электрического напряжения 5,5 кВ в течение 15 минут, причем положительный потенциал подавался на электрод 6.
Для поляризации пьезоэлектрического элемента 4 в радиальном направлении на его внешнюю и внутреннюю образующие поверхности наносились временные технологические электроды, образованные тонким покрытием электропроводящей пасты на основе мелкодисперсного серебра с органической связкой. Затем на эти электроды подавалось постоянное электрическое напряжение 3,8 кВ в течение 15 минут при температуре 180°C, причем положительный потенциал подавался на внутренний технологический электрод. После поляризации технологические электроды удалялись, и на торцовые поверхности напылением серебра наносились рабочие электроды 6, 8. Выводы 11, 12 выполнены антивибрационным кабелем АВКТ-6 длиной 2000 мм.
Макетные образцы второго и третьего видов являются эквивалентом конструкции прототипа. Макет второго вида отличается от первого вида только отсутствием пьезоэлектрического элемента 4 и высотой основания, составляющей 3,5 мм. Конструкция третьего вида 3 отличается от второго вида только высотой основания, равной 9,5 мм.
Измерялись значения коэффициента преобразования по заряду, резонансная частота в закрепленном состоянии, рабочий диапазон частот при неравномерности амплитудно-частотной характеристики 5% и коэффициент влияния деформации основания, характеризующий относительную чувствительность акселерометра к деформации контролируемого объекта согласно стандартным методикам (Типовая программа государственных приемочных испытаний виброизмерительных преобразователей (вибродатчиков) ТПр 147-92. - М.: ВНИИМС, 1992. - 100 с.) [8], (ISO 5347-13: 1993. Датчики вибрации и ударов. Методы калибрования. Ч. 13. Испытания на чувствительность к деформации основания. Подтвержден в 2014 г.) [9], (ГОСТ Р 8.669-2009. Виброметры с пьезоэлектрическими, индукционными и вихретоковыми вибропреобразователями. Методика проверки. Москва, Стандартинформ, 2010) [10].
Коэффициент влияния деформации основания Кε определялся по формуле [3], с. 86-87:
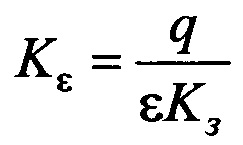
где q - максимальное значение заряда, в пКл, на выходе акселерометра при воздействии деформации на его основание; ε - относительная деформация в месте крепления акселерометра, в мкм/м; Кз - коэффициент преобразования по заряду акселерометра, в пКл/(м⋅с-2).
Все макетные образцы имеют коэффициент преобразования, по заряду равный (1,5±3%) пКл/(м⋅с-2). Остальные характеристики, усредненные по трем образцам каждого вида, представлены в таблице.
Полученные результаты испытаний показали следующее:
- при практически одинаковых значениях массогабаритных параметров, частоте резонанса и верхней границе рабочего диапазона частот коэффициент влияния деформации основания макетных образцов первого вида в 60 раз меньше по сравнению со вторым видом;
- макетные образцы первого вида по сравнению с третьим видом имеют меньшие значения коэффициента влияния деформации основания в 13 раз, высоты в 1,5 раза, массы в 1,7 раза, но превосходят по частоте резонанса и верхней границе рабочего диапазона частот в 1,3 раза;
- увеличение высоты основания макетных образцов третьего вида по сравнению с первым видом по заявляемому изобретению в 2,7 раза хотя и способствует снижению коэффициента влияния деформации основания в 4,7 раза, но одновременно приводит к увеличению общей высоты в 1,5 раза, массы в 1,6 раза, а резонансная частота и верхняя граница рабочего диапазона частот при этом снижаются в 1,3 раза.
Проведенные сравнительные испытания заявляемого пьезоэлектрического акселерометра и конструкций, эквивалентных прототипу, показали возможность достижения указанного технического результата.
Источники информации
1. RU 2400760, G01P 15/09, опубл. 27.09.2010.
2. RU 2402019, G01P 15/09, 20.10.2010.
3. Янчич В.В. Пьезоэлектрическое приборостроение, том VII. Пьезоэлектрические виброизмерительные преобразователи (акселерометры). Ростов-на-Дону: Изд-во ЮФУ, 2010. - 304 с., стр. 68-70, 86-87.
4. Ж. Аш с соавторами. Датчики измерительных систем: В 2-х книгах. Кн. 2. Пер. с франц. - М.: Мир, 1992. - 424 с., книга 2, с. 92-93).
5. RU 513313, G01P 15/08, опубл. 05.05.1976.
6. SU 1561045 A1, G01P 15/09, опубл. 30.04.90.
7. CN 203561647 (U), МПК: G01P 15/09, 2014-04-23 - прототип.
8. Типовая программа государственных приемочных испытаний виброизмерительных преобразователей (вибродатчиков) ТПр 147-92. - М.: ВНИИМС, 1992. - 100 с.
9. ISO 5347-13: 1993. Датчики вибрации и ударов. Методы калибрования. Ч. 13. Испытания на чувствительность к деформации основания. Подтвержден в 2014 г.
10. ГОСТ Р 8.669-2009. Виброметры с пьезоэлектрическими, индукционными и вихретоковыми вибропреобразователями. Методика проверки. Москва, Стандартинформ, 2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2400760C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК | 2018 |
|
RU2684139C1 |
| Пьезоэлектрический акселерометр | 1983 |
|
SU1137396A1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| СПОСОБ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОКОНТРОЛЯ | 2008 |
|
RU2393487C1 |
| Пьезоэлектрический акселерометр центростремительного ускорения | 2023 |
|
RU2804832C1 |
| АКСЕЛЕРОМЕТР | 2014 |
|
RU2559867C1 |
| ПЬЕЗОАКСЕЛЕРОМЕТР | 2015 |
|
RU2582910C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2106642C1 |
| СПОСОБ НАСТРОЙКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ | 1998 |
|
RU2159444C2 |
Изобретение относится к датчикам для измерения вибрационных и ударных ускорений сложных технических объектов, работающих в условиях экстремальных механических перегрузок. Техническим результатом является снижение чувствительности пьезоэлектрического акселерометра к деформации контролируемого объекта при уменьшении габаритов, повышении резонансной частоты и увеличении верхней границы рабочего диапазона частот. Компенсационный пьезоэлектрический элемент с поперечным радиальным направлением поляризации, установленный на диэлектрической прокладке между рабочим пьезоэлементом и основанием, позволяет преобразовать механические напряжения, возникающие в основании вследствие его деформации, в пропорциональный электрический сигнал, который используется для компенсации сигнала помехи от деформации контролируемого объекта. 1 з.п. ф-лы, 1 табл., 3 ил.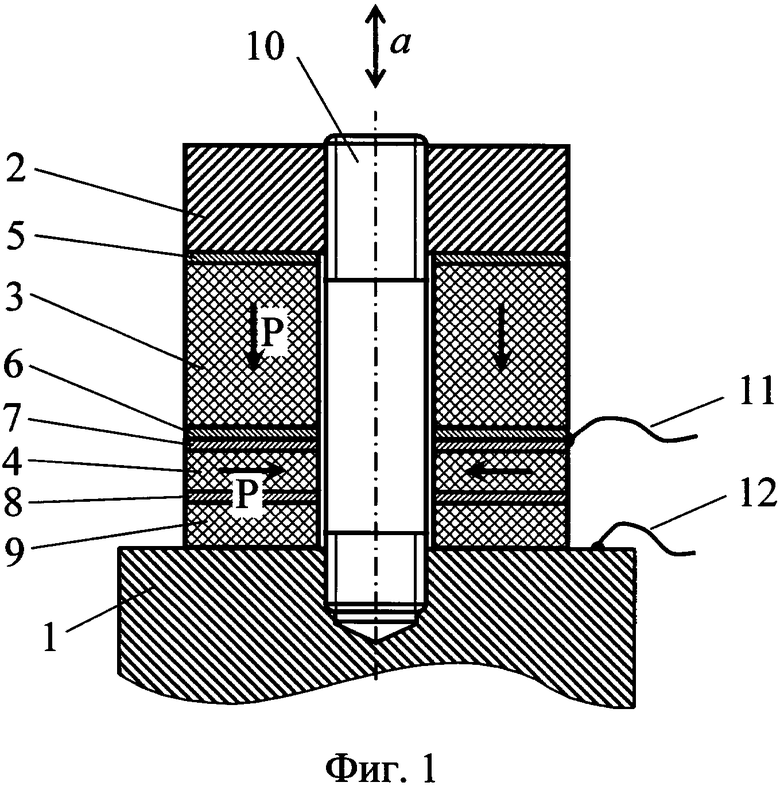
1. Пьезоэлектрический акселерометр, содержащий сжатые в пакет резьбовой шпилькой металлическое основание и расположенные на нем диэлектрическую прокладку, компенсационный пьезоэлектрический элемент с электродами на торцах и радиальным направлением поляризации от периферии к центральной оси акселерометра, параллельном плоскостям электродов, рабочий пьезоэлектрический элемент с электродами на торцах и осевым направлением поляризации в сторону основания, перпендикулярным плоскостям электродов, инерционный элемент, причем сопрягаемые электроды компенсационного и рабочего пьезоэлектрических элементов соединены между собой и с изолированным от основания выводом акселерометра, другой электрод рабочего пьезоэлектрического элемента имеет электрический контакт с инерционным элементом и основанием, а свободный электрод компенсационного пьезоэлектрического элемента подключен к основанию и другому выводу акселерометра через электрическую емкость, образованную диэлектрической прокладкой, соприкасающейся с металлической поверхностью инерционного элемента и свободным электродом компенсационного пьезоэлектрического элемента.
2. Пьезоэлектрический акселерометр по п. 1, отличающийся тем, что диэлектрическая прокладка выполнена из сегнетоэлектрической керамики, имеющей значение диэлектрической проницаемости, в 10-20 раз меньшее, чем материал компенсационного пьезоэлектрического элемента.
| CN 203561647 U, 23.04.2014 | |||
| ТРЕХКОМПОНЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1989 |
|
SU1679867A1 |
| Пьезоэлектрический акселерометр | 1989 |
|
SU1682938A1 |
| US 8915139 B1, 23.12.2014 | |||
| CA 2860949 A1, 28.02.2015. | |||

