Изобретение относится к измерительной технике и может быть использовано для создания высокоточных пьезоэлектрических акселерометровJ. в частности для образцовых акселерометров.
Пьезоэлектрические акселерометры по принципу деформации чувствительного элемента можно разделить на три основные группы .акселерометры с чувствительным элементом, работающим на растяжение - сжатие; акселерометры с чувствит.ельньм элементом, подвергаемым деформации изгиба; акселерометры с чувствительным элементом, подвергаемым деформации сдвига ij
До последнего времени в СССР и за, рубежом в основном вьтускались акселерометры первых двух групп.
Вследствие повышенной чувствительности к воздействию влияющих факторов поперечного ускорения, деформации объекта, температуры,акселерометры I группы имеют недостаточную точность.
Акселерометры И группы имеют невысокие прочностные и динамические характеристики, большие габариты.
Сдвиговые акселерометры имеют лучшие характеристики, чем акселерометры первьк двух групп.
Наиболее близким к предлагаемому является пьезоэлектрический сдвиговый акселерометр, содержащий основание , с установленными на нем пьезоэлементами вертикальной поляризации и инерционными элементами 2J .
Известньй акселерометр имеет недостаточную точность вследствие чувствительности акселерометра к паразитному воздействию - поперечному ускорению. Количественно чувствительность акселерометра к поперечному ускорению характеризуется коэффициентом влияния поперечного ускорения К. Для известного акселерометра коэффициент влияния поперечного ускорения составляет 3%, Если составляющие ускорения в основном и поперечном направлениях равны, то погрешность измерений в этом случае достигает 3%.
Целью изобретения является повышение точности пьезоэлектрического сдвигового акселерометра за счет уменьшения влияния поперечных ускоре
НИИ.
Указанная цель достигается тем, что акселерометр, содержаищй основание с установленными на нем пьезоэлементами вертикальной поляризации и инерционными элементами, снабжен площадками, ортогонально расположенными на основании а пьезоэлементы установлены на площадках с возможностью перемещения таким образом, что вертикальные составляющие векторов поляризации совпадают по направлению, а горизонтальные составляющие противолежапщх пьезоэлементов ориентированы в противоположные стороны, при этом угол установки пьезоэлемента относительно вертикальной оси акселерометра определяется по формуле
Kj.5i5
(Х агс5 п
; sT.v
К, относительный коэффигдециент влияния поперечного ускорения, измеренный в плоскости поворота, выраженный в процентах;
45
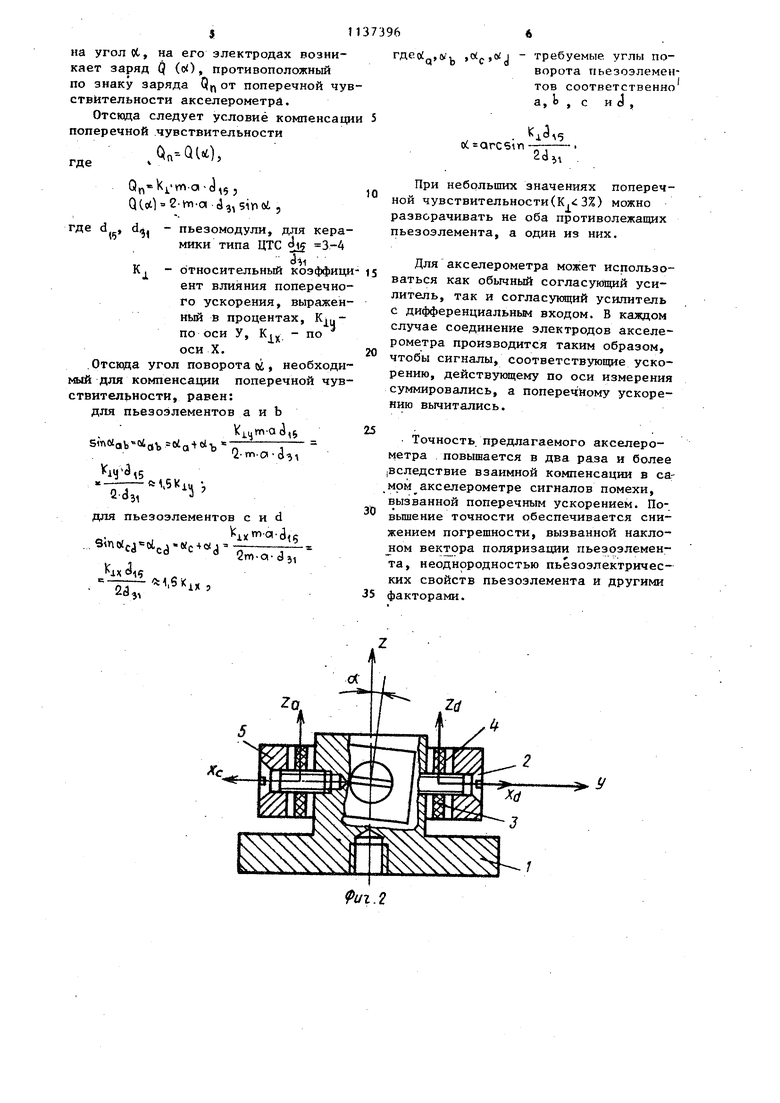
пьезомодули, соответственно сдвиговый и растяжения/сжатия. На фиг. 1 изображен предлагаемый пьезоэлектрический акселерометр, фронтальный разрез; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема разрезки пьезоэлеме нтов из поляризованной заготовки.
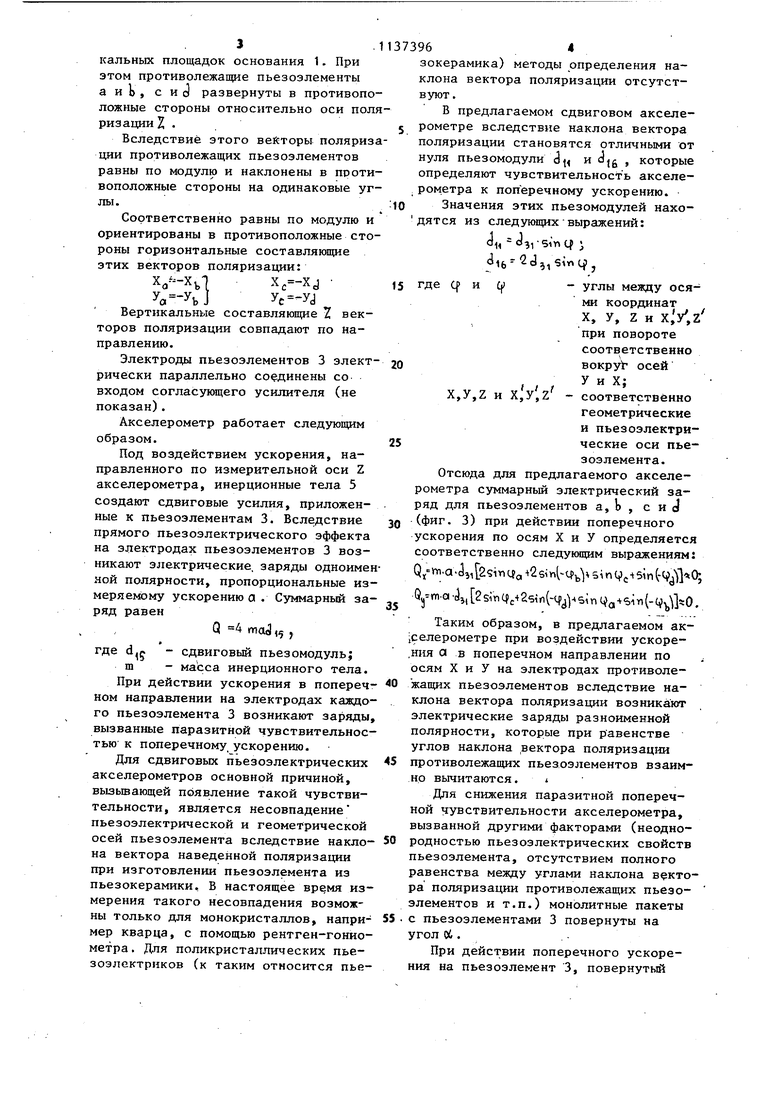
Основание 1 акселерометра (фиг.1 и 2) снабжено четьфьмя вертикальными ортогонально расположенными площадками. На каждой из .площадок с помощью винтов 2 установлен с возможностью углового перемещения монолитныу пакет, состоящий из склеенных между собой пьезоэлемента 3 из пьезокерамики, двух изолирующих прокладок 4 из плавленного кварца и инерционного тела 5, Пьезоэлементы 3 для ориентации при сборке снабжены меткой 6. Пьезоэлементы 3 вьфезаны из одной предварительно поляризованной заготовки из пьезокерамики, выполненной в виде паралелепипеда (фиг. 3), имеющего метку 6 (например, лыску). Направление оси поляризации заготовки соответствует оси Z; На боковых сторонах пьезоэлементов 3 нанесены, электроды (напьшением в вакууме или химическим серебрением) .
Пьезоэлементы, 1)асполс)женные в заготовке рядом: а и Ь , с и d, установлены с противолежа1ци : rri.ipoii перти3.
кальных площадок основания 1. При этом противолежащие пьезоэлементы а и Ь, с и d развернуты в противоположные стороны относительно оси поляризации 2 .
Вследствие этого вейторы поляризации противолежащих пьезоэлементов равны по модулю и наклонены в противоположные стороны на одинаковые углы.
Соответственно равны по модулю и ориентированы в противоположные стороны горизонтальные составляющие этих векторов поляризации:
-ч
X,-Xd
V i;
а
-УЬ
Вертикальные составляющие Z векторов поляризации совпадают по направлению.
Электроды пьезоэлементов 3 электрически параллельно соединены со входом согласующего усилителя (не показан).
Акселерометр работает следующим образом.
Под воздействием ускорения, направленного по измерительной оси Z акселерометра, инерционные тела 5 создают сдвиговые усилия, приложенные к пьезоэлементам 3. Вследствие прямого пьезоэлектрического эффекта на электродах пьезоэлементов 3 возникают электрические, заряды одноименной полярности, пропорциональные измеряемому ускорению а . Сз ммарный заряд равен
,Q 4 тсиЗ ,5 ,
где d - сдвиговый пьезомодуль; m - масса инерционного тела.
При действии ускорения в поперечном направлении на электродах каждого пьезоэлемента 3 возникают заряды вызванные паразитной чувствительностью к поперечному, ускорению.
Для сдвиговых пьезоэлектрических акселерометров основной причиной, вызывающей появление такой чувствительности, является несовпадение пьезоэлектрической и геометрической осей пьезоэлемента вследствие наклона вектора наведенной поляризации при изготовлении пьезоэлемента из пьезокерамики, В настоящее время измерения такого несовпадения возможны только для монокристаллов, например кварца, с помощью рентген-гониометра . Д.ПЯ поликристаллических пьезоэлектриков (к таким относится пье373964
зокерамика) методы определения наклона вектора поляризации отсутствуют .
В предлагаемом сдвиговом акселерометре вследствие наклона вектора поляризации становятся отличными от нуля пьезомодули 3 и jg , которые определяют чувствительность акселерометра к поперечному ускорению. iO Значения этих пьезомодулей находятся из следующих-выражений:
и ЭГ51Г.д i ,
15 где q и Cf) - углы между осями координат
X, У, Z и
при повороте соответственно 20вокруЬ осей
У и X; lit X,y,Z и X,y,Z - соответственно
геометрические и пьезоэлектри5ческие оси пьезоэлемента.
Отсюда для предлагаемого акселерометра суммарный электрический заряд для пьезоэлементов а,Ь , с и d Q (фиг. 3) при действии поперечного ускорения по осям X и У определяется соответственно следующим выражениям:
.3i 2 i tJa 2si4-4bV Vc- 5( .a-jj,2sinCfc+26in(-(,iY(-(0.
Таким образом, в предлагаемом ак селерометре при воздействии ускоре,ния а в поперечном направлении по , осям X и У на электродах противолежащих пьезоэлементов вследствие наклона вектора поляризации возникают электрические заряды разноименной полярности, которые при равенстве углов наклона вектора поляризации
5 противолежащих пьезоэлементов взаимно вычитаются. Для снижения паразитной поперечной чувствительности акселерометра, вызванной другими факторами (неоднородностью пьезоэлектрических свойств пьезоэлемента, отсутствием полного равенства между углами наклона в ктора поляризации противолежащих пьезоэлементов и т.п.) монолитные пакеты
5 с пьезоэлементами 3 повернуты на угол Об .
При действии поперечного ускорения на пьезоэлемент 3, повернутый на уголЛ, на его электродах возникает заряд Q (о), противоположный по знаку заряда Qf от поперечной чувствительности акселерометрй. Отсюда следует условие компенсации 5 поперечной чувствительности Qn-QU), Qn-ki4rti.a-j,55 Q(.ot) 2 ifi-cx i,, 9i)noi , da. - пьезомодули, для кера мики типа ЦТС 3-4 К. - относительный коэффиц ент влияния поперечно го ускорения, выражен il4 ный в процентах, по оси У, К - ПО оси X. Отсюда угол поворота oi« необходи мый для компенсации поперечной чув ствительности, равен: для пьезоэлементов а и b (i,5 SmOiab Qta ota- olb 2-m.C3i-iJ l Кду,5 j пьезоэлемеитов nOOIs nc.ca-ci,.«c r-2;;;: ri;; ftl.SKix , 2d,, 1137396 где.о требуемые углы поСд,(У, .ot. ворота пьезоэлементов соответственно о(агс5чп При небольших значениях поперечной чувствительности(К,:3%) можно разворачивать не оба противолежащих пьезоэлемента, а один из них. Для акселерометра может использоваться как обычный согласующий усилитель, так и согласукщий усилитель с дифференциальным входом. В каждом случае соединение электродов акселерометра производится таким образом, чтобы сигналы, соответствующие ускорению, действующему по оси измерения суммировались, а попереч;Ному ускорению вычитались. Точность предлагаемого акселерометра повышается в два раза и более |Вследствие взаимной компенсации в самом акселерометре сигналов помехи, вызванной поперечным ускорением. Повышение точности обеспечивается снижением погрешности, вызванной наклоном вектора поляризации пьезоэлемента, неоднородностью пьезоэлектрических свойств пьезоэлемента и другими факторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический акселерометр | 2016 |
|
RU2627571C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2400760C1 |
| ТРЕХКОМПОНЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОАКСЕЛЕРОМЕТР С ОДНИМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 1994 |
|
RU2061242C1 |
| ТРЕХКОМПОНЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1989 |
|
SU1679867A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2106642C1 |
| БЕСПРОВОДНОЙ ТРЁХКАНАЛЬНЫЙ ДАТЧИК ВИБРАЦИИ | 2021 |
|
RU2765333C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК | 2018 |
|
RU2684139C1 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1973 |
|
SU408220A1 |
| Пьезоэлектрический акселерометр | 1973 |
|
SU477348A1 |
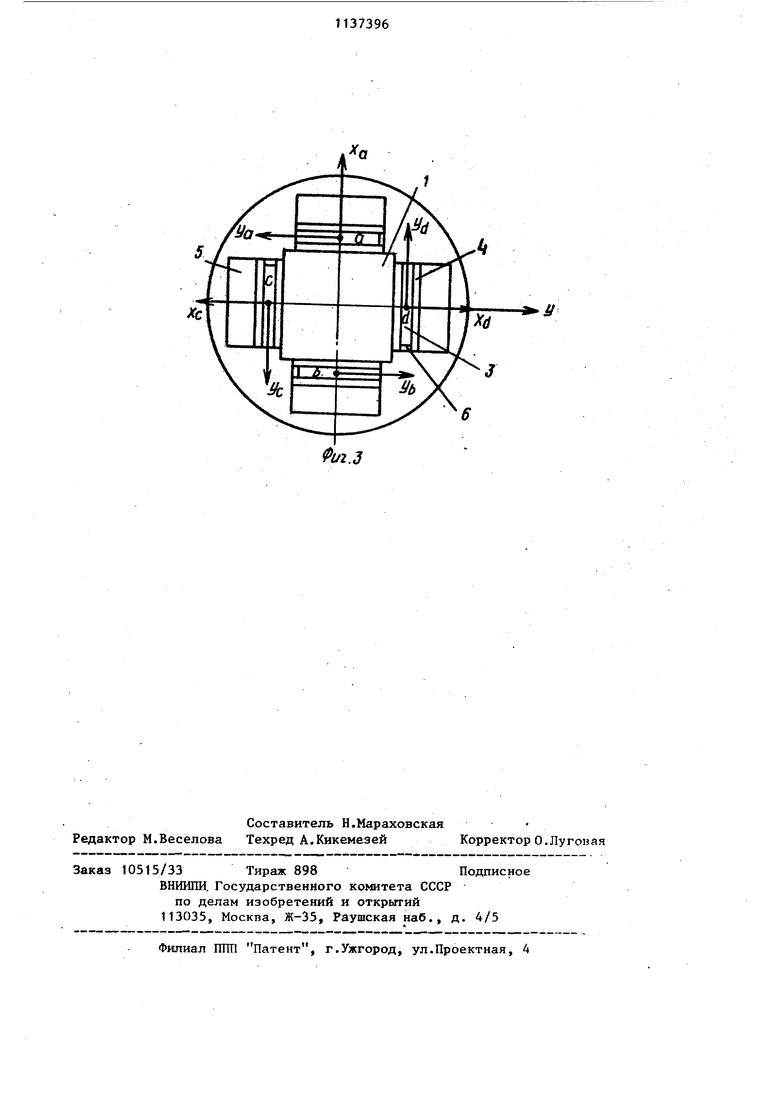
ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКСЕЛЕРО-. МЕТР, содержащий основание с установленными на нем пьезоэлементами вертикальной поляризации и инерционными элементами, отличающийся тем, что, с целью повышения точности измерений за счет уменьшения, влияния поперечных ускорений, он снабжен площадками, ортогонально расположенными на основании, а пьезоэлементы установлены на площадках с возможност«о перемещения таким образом, что вертикальные составлякяцие векторов поляризации совпадают по направлению, -а горизонтальные составляющие противолежащих пьезоэлементов ориентированы в противоположные стороны, при этом угол установки пьезоэлемента относительно вертикальной оси акселерометра определяется по формуле . oi arcstn-r-.- 5 °Ъл к, - относительный коэффигде циент влияния поперечного ускорения, измеренный в плоскости поворота, выраженный в процентах; ,0, - пьезомодули, соответ15 ственно сдвиговый и растяжения - сжатия.
ZQ
У
иг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы и системы для измерения вибрации, шума и удйра | |||
| Справочник под ред | |||
| проф | |||
| В.В.Клюева | |||
| М., Машиностроение, 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каталог фирмы Эндевко, США, 1979. | |||
