Область техники, к которой относится изобретение
Настоящее изобретение относится к обнаружению проскока аммиака в системе очистки выхлопных газов в составе выхлопной системы двигателя внутреннего сгорания.
Предпосылки изобретения
Дизельные транспортные средства могут быть оснащены системой очистки выхлопных газов, которая может включать в себя, например, систему селективного каталитического восстановления (SCR) с использованием мочевины и один или более датчиков выхлопных газов, например, датчики оксида азота (NOx), по меньшей мере один из которых может быть расположен после системы SCR. После загрузки системы SCR мочевиной до уровня насыщения, который зависит от температуры, в системе SCR может начаться проскок аммиака (NH3). Проскок NH3 из системы SCR может быть обнаружен датчиком NOx на выхлопной трубе как NOx, что приводит к неправильному, слишком высокому показанию NOx. Таким образом, эффективность системы SCR фактически может быть больше, чем эффективность, определенная на основании неправильных показаний количества NOx.
В публикации патентной заявки США №2012/0085083 раскрыт способ оценки конверсии NOx с использованием полиноминальной модели, которая также позволяет оценить концентрацию NH3 на датчике NOx в выхлопной трубе ниже по потоку. Как описано в указанном документе, временные характеристики датчика NOx в подаваемом газе, расположенного выше по потоку от системы SCR, и датчика NOx на выхлопной трубе, расположенного ниже по потоку от системы SCR, количественно определяют и подгоняют с помощью полиноминальной модели, обеспечивающей возможность оценки проскока NH3 и эффективности конверсии NOx. Однако, поскольку при данном способе для обработки используют сегмент сигнала каждого датчика, существует задержка по времени между получением выходного сигнала каждого датчика NOx и присвоением NOx и NH3 выходного сигнала расположенного ниже по потоку датчика NOx. При сочетании задержки по времени с описанным алгоритмом полиноминальной подгонки, что может быть подвержено локализированным погрешностями оценки, реализовать систему обнаружения проскока NH3 в режиме реального времени описанными способами будет затруднительно.
Раскрытие изобретения
Авторы изобретения выяснили недостатки вышеописанного подхода и предлагают усовершенствованный способ контроля проскока аммиака в выхлопной системе двигателя в режиме реального времени. В описываемых способах используют переходные отклики датчика NOx для идентификации скоростей изменения сигнала NOx. Затем процессор дополнительно использует эти скорости изменения для определения того, как показания датчика NOx на выхлопной трубе ниже по потоку должны измениться на основании скорости выше по потоку от системы SCR, что обеспечивает возможность присвоения показаний датчика NOx на выхлопной трубе нижеописанным образом практически без ощутимых задержек в обработке.
В одном конкретном примере выхлопная система включает в себя два датчика NOx, которые непрерывно контролируют поток выхлопных газов выше и ниже по потоку от устройства SCR. Затем, при соблюдении входных условий системы двигателя, например, когда температура устройства SCR превышает пороговое значение, скорость изменения показаний расположенного выше по потоку датчика NOx в подаваемом газе комбинируется с текущими показаниями датчика NOx, расположенного на выхлопной трубе, для оценки ожидаемой скорости изменения показаний датчика NOx на выхлопной трубе на основании градиента сигнала датчика подаваемого газа. Ожидаемый сигнал датчика NOx на выхлопной трубе затем сравнивается с фактическим сигналом NOx с целью присвоения NOx и NH3 выходного сигнала датчика NOx.
В другом примере предложен способ, включающий присвоение выходного сигнала датчика NOx каждому из NH3 и NOx на основании скорости изменения NOx выше по потоку и скорости изменения NOx ниже по потоку от выпускного устройства SCR, что позволяет посредством этого регулировать количество восстановителя, подаваемого в выхлопные газы двигателя, на основании относительных сигналов датчиков. Поскольку в способе используют переходные отклики расположенных выше и ниже по потоку датчиков NOx в дополнение к ожидаемому сигналу NOx, можно добиться высокого уровня обнаружения NH3. Таким образом, можно обеспечить улучшенное присвоение выходного сигнала датчика NOx для определения относительных уровней NOx и NH3 в выхлопной системе.
Настоящее изобретение может иметь ряд преимуществ. В частности, такой подход может обеспечивать обнаружение проскока NH3 в режиме реального времени с высоким уровнем чувствительности обнаружения без вклада NOx из подаваемого газа. По существу, проскок NH3 может быть обнаружен в процессе работы транспортного средства, что позволит предпринять корректирующие меры на основании текущего состояния выхлопной системы. Более того, в силу повышенной чувствительности обнаружения для определения присвоения NOx и NH3 выходного сигнала датчика NOx на выхлопной трубе не требуется высоких уровней NOx.
Описанные выше преимущества, а также прочие преимущества и признаки станут очевидны после ознакомления со следующим подробным описанием предпочтительных вариантов осуществления изобретения отдельно или со ссылкой на сопроводительные чертежи. Необходимо понимать, что приведенное выше краткое изложение изобретения используется для того, чтобы познакомить в упрощенной форме с выбором концепций, которые будут далее рассмотрены в подробном описании. Она не предназначена для определения ключевых или существенных признаков заявленного объекта, объем охраны которого определяется исключительно формулой изобретения, приведенной после подробного описания. Кроме того, заявленный объект изобретения не ограничен теми вариантами реализации, которые устраняют любые недостатки, указанные выше или упомянутые в любой части настоящего раскрытия.
Краткое описание чертежей
Для более полного понимания описанные здесь преимущества следует рассматривать на одном из примеров осуществления со ссылкой на подробное описание предпочтительных вариантов, отдельно или со ссылкой на сопроводительные чертежи.
На Фиг. 1 представлено схематическое изображение двигателя, включающее в себя выхлопную систему с системой очистки выхлопных газов;
На Фиг. 2A-D показаны графики, иллюстрирующие состояние проскока аммиака;
На Фиг. 3 показана последовательность операций способа, иллюстрирующая процедуру обнаружения проскока аммиака в системе очистки выхлопных газов;
На Фиг. 4 показана последовательность операций способа, иллюстрирующая процедуру контроля рабочих параметров при выходном сигнале датчика выхлопных газов, присвоенном оксиду азота;
На Фиг. 5 показана последовательность операций способа, иллюстрирующая процедуру контроля рабочих параметров при выходном сигнале датчика выхлопных газов, присвоенном аммиаку.
Подробное описание изобретения
Нижеследующее описание относится к системам и способам обнаружения проскока NH3 из системы SCR на основании обнаруженных в ней переходных сигналов NOx. В одном примере описывается способ, включающий в себя использование информации от двух датчиков NOx - датчика подаваемого газа, расположенного выше по потоку от SCR, и расположенного ниже по потоку датчика на выхлопной трубе, для прогнозирования градиента сигнала датчика NOx на выхлопной трубе в ответ на переходный сигнал NOx подаваемого газа. Также способ включает в себя создание огибающей вокруг ожидаемого сигнала датчика NOx на выхлопной трубе и присвоение выходного сигнала датчика NOx каждому из аммиака и оксида азота в различных количествах на основании изменений выходного сигнала. Например, переходный выходной сигнал датчика на выхлопной трубе, выходящий за пределы ожидаемой огибающей, показывает, что происходит проскок NH3 из выхлопной системы, что также выражается количественно в виде линейного положительного изменения счетчика в сторону более высокого уровня, что указывает на проскок NH3. И наоборот, переходный выходной сигнал датчика на выхлопной трубе, находящийся в пределах ожидаемой огибающей, показывает, что происходит проскок NOx, что также выражается количественно в виде линейного отрицательного изменения счетчика в сторону более низкого уровня, что указывает на проскок NOx. Таким образом, датчик выхлопного газа может быть использован для индикации как пониженной эффективности системы очистки выхлопного газа, так и условия проскока NH3. Способ также включает в себя регулировку одного или более рабочих параметров на основании упомянутого присвоения и изменения выходного сигнала датчика.
Обращаясь к Фиг. 1, там показано схематическое изображение одного из цилиндров многоцилиндрового двигателя 10, который может входить в состав движительной системы автомобиля. Двигателем 10 можно управлять по меньшей мере частично с помощью системы управления, содержащей контроллер 12, а также с помощью входных сигналов, направляемых водителем 132 транспортного средства с помощью устройства 130 ввода данных. В данном примере устройство 130 ввода данных представляет собой педаль газа и датчик 134 положения педали, который генерирует пропорциональный сигнал положения педали PP. Камера сгорания 30 (цилиндр) двигателя 10 может иметь стенки 32 камеры сгорания с расположенным в них поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен с по меньшей мере одним ведущим колесом транспортного средства с помощью системы трансмиссии. Кроме того, для запуска двигателя 10 к коленчатому валу 40 может быть с помощью маховика подключен пусковой мотор.
В камеру 30 сгорания воздух поступает из впускного коллектора 44 через впускной канал 42, а газообразные продукты сгорания выводятся через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 выборочно сообщаются с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера 30 сгорания может иметь два или более впускных клапана и/или два или более выпускных клапана.
В данном примере, изображенном на Фиг. 1, впускной клапан 52 и выпускной клапан 54 могут управляться кулачками посредством систем 51 и 53 кулачкового привода. Системы 51 и 53 кулачкового привода могут содержать один или более кулачков и могут использовать одну или более систем, выбранных из системы переключения профиля кулачка (CPS), изменяемой синхронизации кулачка (VCT), изменяемой фазы газораспределения (VVT) и/или изменяемого подъема клапана (VVL), которые могут эксплуатироваться контроллером 12 для изменения работы клапана. Положение впускного клапана 52 и выпускного клапана 54 может быть определено позиционными датчиками 55 и 57 соответственно. В других вариантах осуществления изобретения управление впускным клапаном 52 и/или выпускным клапаном 54 может осуществляться электрическим клапанным приводом. Например, цилиндр 30 может иметь впускной клапан, управление которым осуществляется с помощью электрического клапанного привода, и выпускной клапан, управление которым осуществляется кулачковым приводом, включая системы CPS и/или VCT.
В некоторых вариантах каждый цилиндр двигателя 10 может иметь одну или более топливных форсунок для подачи топлива. В качестве одного из примеров, цилиндр 30 показан с одной топливной форсункой 66. Топливная форсунка 66 соединяется непосредственно с цилиндром 30 для прямого впрыска топлива в цилиндр 30 пропорционально длительности импульса сигнала FPW, полученного с контроллера 12 через электронный привод 68. Таким образом, топливная форсунка 66 обеспечивает так называемый прямой впрыск (также именуемый в дальнейшем «DI») топлива в цилиндр 30 двигателя внутреннего сгорания.
Следует понимать, что в альтернативном варианте форсунка 66 может представлять собой форсунку для впрыска топлива во впускной канал выше по потоку от цилиндра 30 (распределительный впрыск). Следует также принимать во внимание, что цилиндр 30 может получать топливо от нескольких форсунок, например, нескольких форсунок для впрыска топлива во впускной канал, нескольких форсунок непосредственного впрыска или их сочетания.
В одном примере, двигатель 10 является дизельным двигателем, воспламеняющим воздух и дизельное топливо от сжатия. В еще одном варианте двигатель 10 может воспламенять различные виды топлива, в том числе бензин, биодизельное топливо или спиртосодержащую топливную смесь (например, бензин и этанол или бензин и метанол) с помощью сжатия и/или искрового зажигания.
Впускной коллектор 44 может содержать дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере положение дроссельной заслонки 64 может регулироваться контроллером 12 с помощью сигнала, подаваемого на электродвигатель или исполнительный механизм дросселя 62. Такую конфигурацию принято называть электронным управлением положением дроссельной заслонки (ETC). Таким образом, дроссель 62 может использоваться для варьирования потока впускного воздуха, подаваемого в камеру 30 сгорания, между другими цилиндрами двигателя. Положение дроссельной заслонки 64 может подаваться на контроллер 12 с помощью сигнала TP о положении дроссельной заслонки. Впускной канал 42 может содержать датчик 120 массового расхода воздуха (MAF) и датчик 122 давления воздуха в коллекторе (MAP) для передачи соответствующих сигналов MAF и MAP контроллеру 12.
Кроме того, в описанных вариантах осуществления система рециркуляции выхлопных газов (EGR) может направлять требуемую часть выхлопных газов из выпускного канала 48 во впускной канал 42 через канал 140 рециркуляции выхлопных газов. Количество рециркулированных выхлопных газов, поступающих во впускной коллектор 44, может меняться контроллером 12 с помощью клапана 142 EGR. За счет введения выхлопных газов в двигатель количество доступного для сгорания кислорода уменьшается, тем самым снижая температуру пламени сгорания и уменьшая образование NOx. Как показано на схеме, в системе EGR может быть предусмотрен расположенный в канале 140 рециркуляции выхлопных газов датчик 144 EGR, который может предоставлять показания об одном или более параметрах из давления, температуры и концентрации выхлопных газов. При некоторых режимах система рециркуляции выхлопных газов может быть использована для регулирования температуры топливовоздушной смеси в камере сгорания, таким образом обеспечивая возможность контроля моментов зажигания при некоторых режимах сгорания. Кроме того, при некоторых условиях часть выделяющихся при горении газов может быть удержана или захвачена в камере сгорания с помощью регулирования фаз газораспределения, в частности, управления механизмом измененяемого газораспределения.
Выхлопная система 128 включает в себя датчик 126 выхлопных газов, связанный с выхлопным каналом 48 выше по потоку от системы 150 обработки выхлопных газов. Датчиком 126 может быть любой датчик, пригодный для обеспечения индикации соотношения воздух/топливо в выхлопных газах, такой как, например, линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), бистабильный датчик кислорода или EGO (как изображено), HEGO (нагреваемый датчик кислорода), датчик NOx, НС или СО. Система 150 обработки выхлопных газов показана расположенной вдоль выпускного канала 48 ниже по потоку от датчика 126 выхлопных газов.
В примере, изображенном на Фиг. 1, системой 150 обработки выхлопных газов является система селективного каталитического восстановления (SCR) с использованием мочевины. Система SCR включает в себя, например, каталитический нейтрализатор 152, резервуар 154 для хранения мочевины и инжектор (форсунку) 156 мочевины. В других вариантах осуществления в качестве альтернативы или дополнения система 150 обработки выхлопных газов может включать в себя другие компоненты, например, сажевый фильтр, уловитель обедненного NOx, трехкомпонентный нейтрализатор, прочие устройства для снижения токсичности выхлопа или их комбинации. В изображенном примере инжектор 156 мочевины подает мочевину из резервуара 154 для хранения мочевины. Однако могут быть использованы различные альтернативные подходы, например, твердые гранулы мочевины, выделяющие пары аммиака, которые затем впрыскиваются или дозируются в каталитический нейтрализатор 152 системы SCR. В еще одном примере уловитель обедненного NOx может располагаться выше по потоку от каталитического нейтрализатора 152 системы SCR, чтобы выделять NH3 для каталитического нейтрализатора 152 в зависимости от степени обогащения топливовоздушной смеси, поступающей в уловитель обедненного NOx.
Система 150 обработки выхлопных газов также включает в себя датчик 158 выхлопных газов, расположенный ниже по потоку от каталитического нейтрализатора 152 системы SCR. В изображенном варианте осуществления датчиком 158 выхлопных газов может быть, например, датчик NOx для измерения количества NOx после системы SCR. В некоторых примерах эффективность системы SCR можно определять, например, по показаниям датчика 158 выхлопных газов, а также по показаниям расположенного выше по потоку от системы SCR датчика 126 выхлопных газов (например, когда датчик 126 измеряет NOx). В других примерах датчик 158 выхлопных газов может быть любым подходящим датчиком для определения концентрации компонентов выхлопных газов, например, датчик UEGO, EGO, HEGO, НС, СО и др.
Контроллер 12 показан на Фиг. 1 как микрокомпьютер, содержащий микропроцессорный блок 102 (CPU), порты ввода/вывода 104 (I/O), электронный носитель данных для исполняемых программ и калибровочных значений, показанный как постоянное запоминающее устройство 106 (ROM), оперативное запоминающее устройство 108 (RAM), энергонезависимое запоминающее устройство 110 (КАМ) и шину данных. В дополнение к сигналам, рассмотренным ранее, контроллер 12 может получать различные сигналы от датчиков, подключенных к двигателю 10, включая: измерение массового расхода поступающего воздуха (MAF) от датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ЕСТ) от датчика 112 температуры, подключенного к рубашке 114 охлаждения; профильный выходной сигнал зажигания (PIP) от датчика 118 на эффекте Холла (или другого типа), подключенного к коленчатому валу 40; положение дроссельной заслонки (TP) от датчика положения дросселя; сигнал об абсолютном давлении во впускном коллекторе двигателя (MAP) от датчика 122 давления; и концентрацию компонентов в выхлопных газах от датчиков 126 и 158 выхлопных газов. Сигнал о скорости вращения двигателя (RPM) может генерироваться контроллером 12 из сигнала PIP.
Запоминающее устройство 106 ROM носителя данных может быть запрограммировано с помощью невременных машиночитаемых данных, представляющих собой инструкции, исполняемые процессорным блоком 102 для выполнения описанных ниже способов, а также других вариантов, которые предполагаются, но специально не перечислены.
В одном примере контроллер 12 может обнаруживать проскок NH3 на основании выходных сигналов от датчика 158 выхлопных газов, как описано подробнее ниже со ссылкой на Фиг. 2. Например, когда датчик 158 обнаруживает пороговое увеличение выходного сигнала NOx, контроллер 12 регулирует положение клапана 142 системы EGR, уменьшая величину рециркуляции выхлопных газов (EGR) до уровня, при котором увеличивается выброс NOx из двигателя 10. Исходя из изменения выходного сигнала датчика во время периода меньшей рециркуляции выхлопных газов, выходной сигнал датчика присваивается NOx или NH3. Например, если выходной сигнал датчика увеличивается, то выходной сигнал присваивается NOx, так как увеличенный NOx из двигателя не восстанавливается системой SCR. С другой стороны, при отсутствии изменений выходного сигнала датчика больше, чем на пороговую величину, выходной сигнал присваивается NH3 и указывается на проскок NH3. На основании изменения выходного сигнала и такого присвоения контроллер 12 может регулировать один или более параметров работы двигателя. В одном из не ограничивающих примеров контроллер 12 может регулировать величину EGR и/или подачу восстановителя на основании изменения выходного сигнала и упомянутого присвоения.
Как описано выше, на Фиг. 1 показан только один цилиндр многоцилиндрового двигателя. Каждый цилиндр может подобным образом иметь свой собственный набор впускных/выпускных клапанов, топливную форсунку, свечу зажигания и т.д.
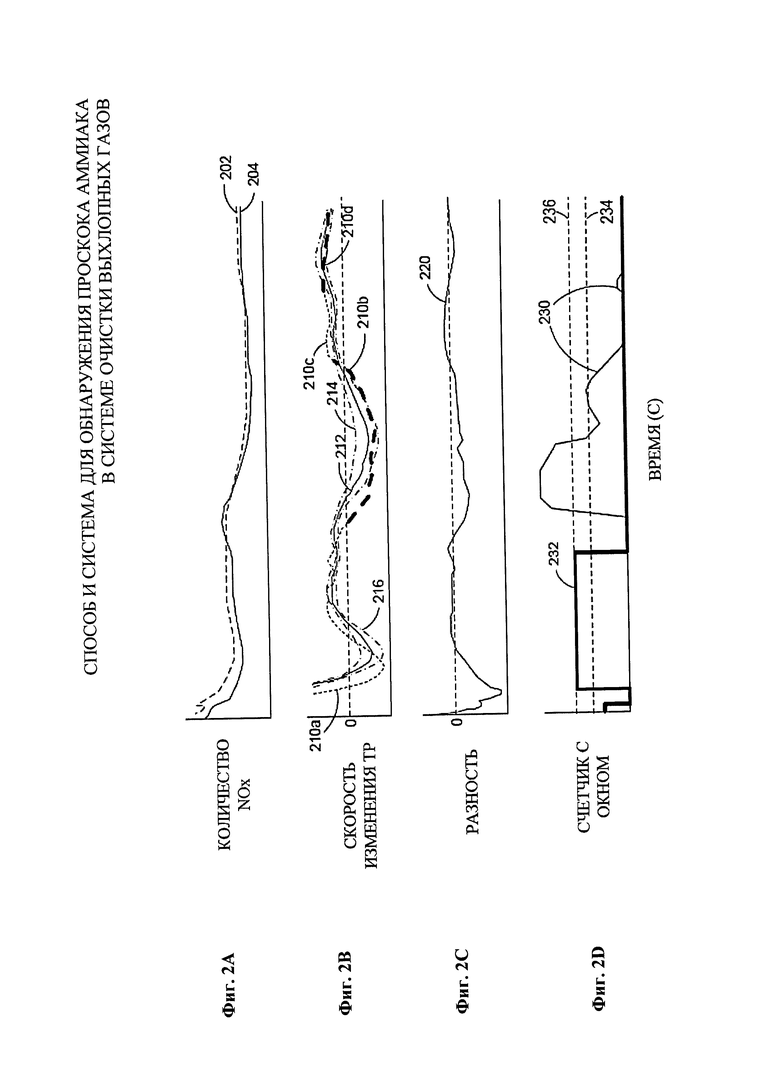
Обращаясь к графикам, показанным на Фиг. 2A-D, там показан пример переходного сигнала NOx, который отражает условия проскока аммиака для системы с двумя датчиками по Фиг. 1. Поскольку датчики NOx выдают выходные сигналы в ответ как на NOx, так и на NH3, способ обнаружения проскока NH3 может быть полезен для управления выхлопом выхлопной системы и ресурсами в ней. Например, если система SCR загружена мочевиной до уровня насыщения, который варьирует с температурой, может начаться проскок NH3. Проскок NH3 из системы SCR может быть считан датчиком NOx на выхлопной трубе в качестве NOx, в результате чего система контроля и управления SCR оказывается введенной в заблуждение, полагая, что эффективность системы ниже, чем она есть на самом деле, так как часть сигнала фактически вызвана наличием NH3.
На Фиг. 2A-D изображены четыре графика зависимости от времени, иллюстрирующих описанный способ. Четыре графика взаимосвязаны, поэтому для них используется одна и та же временная ось, которая для упрощения изображена вдоль нижнего графика. Кроме того, несмотря на схематичное представление данных в виде зависимости от времени в секундах, эта единица времени не является единственно возможной. Идя сверху вниз, четыре графика отражают: сигналы NOx, собранные датчиками NOx в выхлопной системе; производные кривые прогнозируемого и фактического градиентов сигнала датчика NOx на выхлопной трубе в соответствии со способом; линию, показывающую разность между прогнозируемым и фактическим градиентами сигнала датчика NOx на выхлопной трубе; и счетчик с пороговым значением для индикации проскока NH3.
На Фиг. 2А пунктирной линией изображен пример сигнала 202 датчика подаваемого газа, а сплошной линией - пример сигнала 204 датчика на выхлопной трубе. Когда выхлопная система 128 находится в состоянии проскока NOx, например, когда в системе SCR отсутствует насыщение, и NH3 не высвобождается в выхлопную систему, сигнал датчика на выхлопной трубе может в целом быть пропорционален сигналу датчика подаваемого газа. По существу, сигнал NOx датчика подаваемого газа и сигнал датчика NOx на выхлопной трубе могут совпадать по фазе и тесно следовать друг за другом. Кроме того, когда коэффициент конверсии NOx фактически равен нулю, сигнал 204 датчика на выхлопной трубе и сигнал 202 датчика подаваемого газа могут быть практически идентичны. С другой стороны, при более высоком коэффициенте конверсии NOx форма сигнала 204 датчика на выхлопной трубе может напоминать форму сигнала 202 датчика подаваемого газа, но проходить ниже. И наоборот, когда выхлопная система 128 находится в состоянии проскока NH3, сигнал 204 датчика на выхлопной трубе может иметь несколько уплощенную форму или проходить волнообразно с меньшей частотой, чем сигнал 202 датчика подаваемого газа. По этой причине во время проскока NH3 обычно существует период времени, когда два сигнала не совпадают по фазе. Несмотря на то, что сигнал датчика на выхлопной трубе может превышать сигнал датчика подаваемого газа, в частности, после повышения температуры, это, как правило, происходит при изменяющихся или переходных условиях, что позволяет описываемым способом идентифицировать проскок NH3 по двум сигналам.
Для присвоения сигнала NH3 и NOx в рамках данного способа используют переходной отклик датчиков NOx. Следовательно, основным признаком способа является скорость изменения сигнала NOx в зависимости от времени, или d(NOx)/dt. На Фиг. 2В изображена кривая производной, на которой показан градиент или скорость изменения сигнала 204 датчика на выхлопной трубе с Фиг. 2А в зависимости от времени. Обнаружение перехода NH3 построено на сравнении фактического градиента кривой сигнала датчика на выхлопной трубе с прогнозируемым градиентом сигнала датчика на выхлопной трубе. По существу, на Фиг. 2В также показан фактический градиент 210, отражающий скорость изменения сигнала 204 датчика на выхлопной трубе с Фиг. 2А. Фактический градиент 210 изображен в четырех частях, помеченных a, b, с и d, по причинам, которые подробнее описываются ниже. Способ также включает в себя прогнозирование градиента сигнала датчика NOx на выхлопной трубе по градиенту сигнала датчика NOx в подаваемом газе (сигнал 202 в подаваемом газе на Фиг. 2А) и текущему сигналу датчика NOx на выхлопной трубе или мгновенное считывание с датчика на выхлопной трубе. Прогнозируемый градиент 212 сигнала датчика NOx на выхлопной трубе, например, датчика 158 на Фиг. 1, может быть сгенерирован с использованием известного соотношения. В данном случае градиент NOx в выхлопной трубе прогнозируют с использованием следующего выражения:
(dTPNOx/dt)exp=(TP/FG)*(dFGNOx/dt)act,
где (dTPNOx/dt)exp - это ожидаемая или прогнозируемая скорость изменения сигнала датчика на выхлопной трубе, TP - это мгновенное значение сигнала датчика на выхлопной трубе, FG - мгновенное значение сигнала датчика в подаваемом газе, (dFGNOx/dt)act - фактическая скорость изменения сигнала датчика подаваемого газа. При использовании такого способа сравнение градиентов двух сигналов на основании переходных откликов датчиков NOx позволяет добиться более высокого уровня чувствительности обнаружения NH3. Например, в некоторых вариантах осуществления с помощью способа обнаружения перехода можно обнаружить такие низкие уровни аммиака, как 25 млн-1 (ppm).
Для того чтобы измерить, насколько близок фактический градиент 210 к прогнозируемому градиенту 212 во время работы, иными словами, насколько обнаруженное изменение сигнала датчика NOx соответствует изменению, ожидаемому от сигналов датчика подаваемого газа и при эффективностях системы, описанный способ обнаружения проскока аммиака (ammonia slip detection, ASD) включает в себя создание огибающей вокруг кривой прогнозируемого градиента. Огибающая задает область вокруг прогнозируемой скорости изменения, где выходной сигнал датчика NOx скорее всего упадет, если в системе происходит проскок NOx. Таким образом, на Фиг. 2В изображены две штрихпунктирные линии, соответствующие отклонению положительной огибающей 214 от прогнозируемого градиента в положительном направлении и отклонению отрицательной огибающей 216 от прогнозируемого градиента в отрицательном направлении. Взятые вместе, положительная и отрицательная огибающие задают область вокруг кривой прогнозируемой скорости изменения, позволяющую осуществить дискриминацию сигнала и оценку уровней NOx и NH3 в выхлопной системе.
Возвращаясь к фактическому градиенту 210, изображенному в четырех частях, помеченных a, b, с и d, различные области кривой обозначают периоды времени, когда соблюдены входные условия, при которых сравнение двух кривых градиентов предположительно обеспечит возможность точного определения уровней NOx и NH3 в выхлопной системе. Например, датчики 126 и 158 в выхлопной системе 128 соединены с контроллером 12, который может включать в себя машиночитаемые невременные данные, представляющие собой исполняемые процессором 102 инструкции по активации и деактивации способа в зависимости от условий работы двигателя. Следовательно, кривые 210а и 210 с изображены в виде нежирных пунктирных участков линии, соответствующих примерным периодам времени, в течение которых не соблюдены входные условия, и способ не активирован. С другой стороны, кривые 210b и 210d изображены в виде жирных пунктирных участков линий, соответствующих примерным периодам времени, в течение которых входные условия соблюдены и способ активирован. При активации контроллер обрабатывает данные, сравнивая фактический градиент 210 с прогнозируемым градиентом 212 и окружающей огибающей. В принципе, когда фактический градиент 210 находится в пределах огибающей, счетчик с окном показывает линейное отрицательное уменьшение в сторону нуля, что свидетельствует о присутствии NOx в выхлопной системе, а когда фактический градиент 210 находится за пределами огибающей, счетчик с окном показывает линейное положительную увеличение в сторону от нуля к более высокому уровню, что свидетельствует о наличии проскока NH3 в выхлопной системе.
В некоторых вариантах при условиях проскока NH3 в выхлопной системе может быть использован сигнал датчика NOx на выхлопной трубе с меньшим частотным спектром относительно сигнала датчика NOx в подаваемом газе. По этой причине более высокая частота сигнала датчика NOx на выхлопной трубе может свидетельствовать о проскоке NH3. Следовательно, когда фактический градиент 210 выше частотного порога, более высокий спектр частот может быть интерпретирован как сигнал NOx. В ответ на это счетчик с окном может показывать линейное уменьшение в сторону нуля, что свидетельствует о проскоке NOx вне зависимости от того, находится ли градиент в пределах огибающей или за ее пределами. Например, в некоторых вариантах скорость изменения, (dTPNOx/dt)act (фактический градиент 210 на Фиг. 2В), превышающая максимально допустимую скорость, может быть воспринята системой как отклик NOx.
На Фиг. 2С изображен график 220 разности между фактическим градиентом 210 и спрогнозированным градиентом 212 с Фиг. 2В. Кроме того, для ясности показана горизонтальная линия при у=0, которая указывает, что разности нет. На этом графике можно более четко наблюдать колебания фактического градиента относительно спрогнозированного. Например, на более раннем этапе слева наблюдается отрицательный пик, который свидетельствует о том, что фактический градиент ниже градиента, который был спрогнозирован с применением описанного способа (например, фактический градиент 210 ниже спрогнозированного градиента 212). Затем, следуя по контуру графика разницы, можно увидеть, что фактический градиент колеблется вокруг спрогнозированного на основании условий в выхлопной системе. Хотя это и не показано, в некоторых вариантах могут быть использованы другие горизонтальные пороговые линии для указания на места, в котором два графика различаются наиболее существенно.
На Фиг. 2D показан график счетчика с окном, используемого для индикации проскока NH3. Как было кратко описано выше, когда система обнаружения проскока аммиака активируется контроллером 12, счетчик с окном прирастает до более высокого уровня, который указывает на проскок NH3, когда фактический градиент 210 находится за пределами огибающей, и изменяется до более низкого уровня, что указывает на проскок NOx, когда фактический градиент 210 находится в пределах огибающей. Поэтому счетчик с окном 230 показан с увеличением, когда фактический градиент 210b находится за пределами огибающей. На Фиг. 2D показано два пороговых значения. Первый порог 236 указывает на проскок NH3 в выхлопной системе. В связи с этим, когда счетчик превышает первый порог 236, устанавливается соответствующий флажок NH3, который указывает на то, что NH3 проскакивает из системы SCR. Для упрощения в этом примерном способе флажок NH3 является двоичным флажком. Таким образом, когда счетчик 230 превышает первый порог 236, флажок NH3 устанавливается на «1». С другой стороны, когда счетчик 230 показывает значение ниже первого порога 236, флажок NH3 сбрасывается на «0». В показанном примере применения обработки сигнала система обнаружения активируется в двух областях, обозначенных позициями 210b и 210d. В эти периоды времени счетчик работает, а контроллер использует состояние системы, чтобы определить, имеет ли место проскок NH3 или нет. В некоторых вариантах осуществления относительное значение счетчика 230 с окном по сравнению с первым порогом 236 может быть использовано для индикации проскока NH3 в выхлопной системе, в то время как в других вариантах осуществления может быть использовано мгновенное положение счетчика 230 с окном относительно более высокого уровня (указывающего на NH3) и более низкого уровня (например, «0», указывающий на NOx) для индикации вероятности или величины проскока NH3 в выхлопной системе. В других вариантах осуществления может быть использован второй порог 234, значение которого ниже значения первого порога 236. Если присутствует второй порог 234, флажок NH3 сбрасывается на «0», когда счетчик 230 с окном показывает значение ниже второго порога 234 вместо первого порога 236, как это было описано выше. Различные пороги обеспечивают гистерезис в системе, поэтому сброса флажка NH3 для индикации NOx не происходит, если показания счетчика 230 с окном быстро падают ниже первого порога 236. Вместо этого, присутствие NOx обнаруживается, когда показания счетчика 230 с окном падают ниже первого порога, заданного для индикации более высокой степени проскока NOx в выхлопной системе.
Поскольку система обнаружения проскока аммиака работает под управлением контроллера 12, инструкции по ее деактивации могут быть включены в программное обеспечение системы управления. Хотя система обнаружения может быть деактивирована в зависимости от различных возможных условий работы и возможно множество комбинаций переменных величин, в одном из вариантов осуществления программируемые инструкции могут реализовывать следующие условия для отключения системы обнаружения: низкая температура системы SCR, высокие уровни содержания NOx в подаваемом газе и, следовательно, выходной сигнал о насыщенном подаваемом газе, высокие уровни содержания NOx в выхлопной трубе и, следовательно, выходной сигнал о насыщенном выхлопном газе, уровни содержания NOx в подаваемом газе или выхлопных газах ниже порога обнаружения, высокая или низкая скорость изменения коэффициента конверсии NOx, система двигателя обеспечивает низкий крутящий момент, слабые импульсы впрыска мочевины из резервуара, калибруемая задержка после датчика подаваемого газа или датчика на выхлопной трубе, высокий темп изменения объемной скорости, минимальный/максимальный фактический или прогнозируемый градиент, указывающий на зону нечувствительности в обнаруженном сигнале, низкая скорость изменения NOx в подаваемом газе, задающая точки перегиба кривой подаваемого газа. В ответ на обнаружение контроллером 12 одного или более из упомянутых условий способ обнаружения проскока аммиака может быть деактивирован, поэтому обработка сигнала описанным здесь образом происходить не будет. Например, фактический градиент 210 с относится к сигналу градиента, полученному в момент, когда система обнаружения была отключена. В другом примере линия 232 является бинарной линией, обозначающей состояние системы. Следовательно, когда линия 232 находится практически на оси X, происходит активация системы обнаружения проскока аммиака, и контроллер 12 может контролировать условия выхлопа уже описанным образом. С другой стороны, когда линия 232 находится выше оси X, система обнаружения проскока аммиака может быть деактивирована, т.е. сигнал не обрабатывается. По этой причине дальнейшая обработка сигнала датчика NOx на выхлопной трубе фактически невозможна, так как полученная информация не может достоверно отражать уровни NOx и NH3 в выхлопной системе. Когда система обнаружения выключена, система управления может продолжать контролировать условия в выхлопной системе, а также иметь возможность активировать систему обнаружения, что в некоторых случаях может предполагать блокировку отключающей программы или указанных в ней условий.
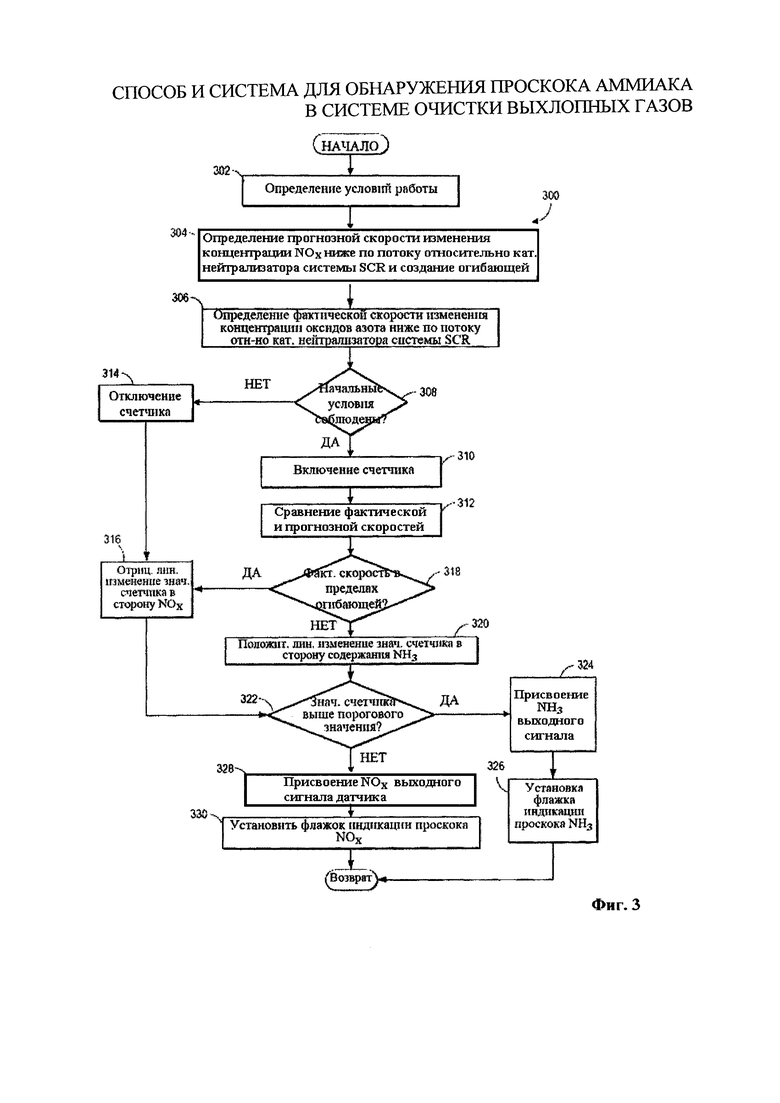
Возвращаясь к способу обработки сигналов NOx системой управления, на Фиг. 3 показана последовательность операций способа, иллюстрирующая пример способа 300 обнаружения проскока аммиака в системе очистки выхлопных газов. Здесь описан набор программируемых решений, которые контроллер может использовать при присвоении сигнала датчика NOx любому из NOx или NH3 или их комбинации.
На этапе 302 способ 300 содержит определение условий работы двигателя. К условиям работы относятся как режимы работы двигателя (например, скорость вращения двигателя, нагрузка двигателя, величина EGR, воздушно-топливное соотношение и т.д.), так и условия работы системы очистки выхлопных газов (например, температура выхлопных газов, температура каталитического нейтрализатора системы SCR, величина впрыска мочевины и т.д.).
На этапе 304 способ 300 включает в себя определение прогнозируемой скорости изменения показаний датчика NOx на выхлопной трубе и создание огибающей на основании ожидаемого градиента. Как описано выше, скорость изменения показаний датчика NOx на выхлопной трубе может быть спрогнозирована с использованием выходного сигнала датчика NOx в подаваемом газе и измеренного текущего выходного сигнала датчика NOx на выхлопной трубе. Затем на основании спрогнозированной скорости изменения показаний датчика NOx на выхлопной трубе способ предполагает создание огибающей, задающей область, в которой ожидается, что сигнал может затухнуть при работе выхлопной системы в условиях проскока NOx. Хотя существует множество способов создания огибающей, в некоторых вариантах осуществления огибающая представляет собой отступ от прогнозного градиента в положительном и отрицательном направлениях на некоторый процент. Например, контроллер, который задает область в пределах 5% от прогнозного градиента 10,0, может создать положительную огибающую со значением 10,5 и отрицательную огибающую со значением 9,5. В качестве альтернативы, если прогнозный градиент меньше, например, 1,0, то положительная огибающая может иметь значение 1,05, а отрицательная - значение 0,95. Следовательно, огибающая будет задавать область вокруг прогнозной кривой в пределах 5% от нее. Возвращаясь к огибающей, изображенной на Фиг. 2В, размер области, заданный огибающей, подвержен явному отклонению по мере колебания амплитуды градиента прогнозной кривой около нуля. На этапе 306 способ 300 содержит определение фактической скорости изменения показаний датчика NOx на выхлопной трубе.
Несмотря на то, что способ 300 может предполагать частый или даже непрерывный контроль показаний датчиков NOx, контроллер 12 может также включать или выключать систему описанным со ссылкой на Фиг. 2В образом. В этой связи на этапе 308 способ 300 содержит определение того, соблюдаются ли входные (начальные) условия. Если контроллер 12 определяет, что имеются условия для проведения системой обнаружения точных измерений, например, в силу того, что температура системы SCR превысила пороговое значение, то система обнаружения проскока аммиака может быть активирована. Таким образом, на этапе 310 активированная система включает активацию счетчика с окном для сравнения фактического и прогнозного градиентов, как показано на этапе 312. В качестве альтернативы, если контроллер 12 определяет, что точные измерения NOx системой невозможны, на этапе 314 система управления может отключить счетчик, так что дальнейшая обработка сигнала после его получения не происходит. В некоторых вариантах осуществления при выключенной системе обнаружения проскока аммиака счетчик может быть сброшен путем линейного уменьшения, указывая, тем самым, на проскок NOx. В других вариантах осуществления счетчик может не изменяться вышеописанным образом, а просто сохраняет значение до повторной активации системы обнаружения.
Возвращаясь к этапу 312, на котором контроллер 12 определил, что соблюдены входные условия и что система обнаружения может быть активирована, чтобы разрешить корректировку счетчика на основании сравнения фактической и прогнозной скоростей изменения NOx, когда сравнение выполнено, на этапе 318 контроллер может быть запрограммирован определять, находится ли фактический градиент в пределах огибающей. Затем, исходя из положения фактического градиента относительно огибающей, на основании соответствующей разницы может быть установлен положительный или отрицательный показатель. Как было подробно рассмотрено выше со ссылкой на Фиг. 2D, на этапе 320, когда фактический градиент находится за пределами огибающей, счетчик показывает линейное увеличение в сторону более высокого уровня, что свидетельствует о проскоке NH3, при этом на этапе 316, когда фактический градиент находится в пределах огибающей, счетчик показывает линейное уменьшение к более низкому уровню (к нулю), что свидетельствует о проскоке NOx.
После линейного изменения счетчика на основании положения фактического градиента относительно огибающей, окружающей прогнозируемую скорость изменения, на этапе 322 способ 300 также сравнивает счетчик с пороговым значением, чтобы определить, следует ли присвоить показания датчика NOx на выхлопной трубе оксидам азота NOx или аммиаку NH3. В одном из вариантов осуществления присвоение показаний датчика содержит присвоение первой части выходного сигнала датчика NOx оксидам азота NOx, а второй, оставшейся части - аммиаку. Затем на основании упомянутого присвоения происходит подача восстановителя в выхлоп двигателя на основании каждой из первой и второй частей. Например, количество восстановителя может быть увеличено в ответ на возросшее количество NOx и уменьшено в ответ на возросшее количество NH3. Следовательно, количество впрыскиваемого восстановителя в целом зависит от относительных количеств, указанных первой и второй частями сигнала.
Если счетчик превышает первый порог, например, первый порог 236, как показано на Фиг. 2D, то на этапе 324 контроллер 12 может присвоить по меньшей мере частично выходной сигнал датчика на выхлопной трубе проскоку NH3 и на этапе 326 установить для этого соответствующий флажок. С другой стороны, если контроллер 12 установит, что показания счетчика падают ниже первого порога, то на этапе 328 контроллер может присвоить по меньшей мере частично выходной сигнал датчика на выхлопной трубе проскоку NOx и на этапе 330 установить для этого соответствующий флажок. В некоторых вариантах осуществления текущий статус присвоения датчика может соответствовать вероятности проскока NH3, в то время как в других вариантах флажок проскока NH3 может быть бинарным. Таким образом, контроллер 12 может обнаруживать проскок NH3 в выхлопной системе и присваивать выходной сигнал датчика NOx либо одному, либо обоим из NOx и NH3, сообщая при этом текущий статус водителю и регулируя один или более рабочих параметров на основании выходного сигнала датчика.
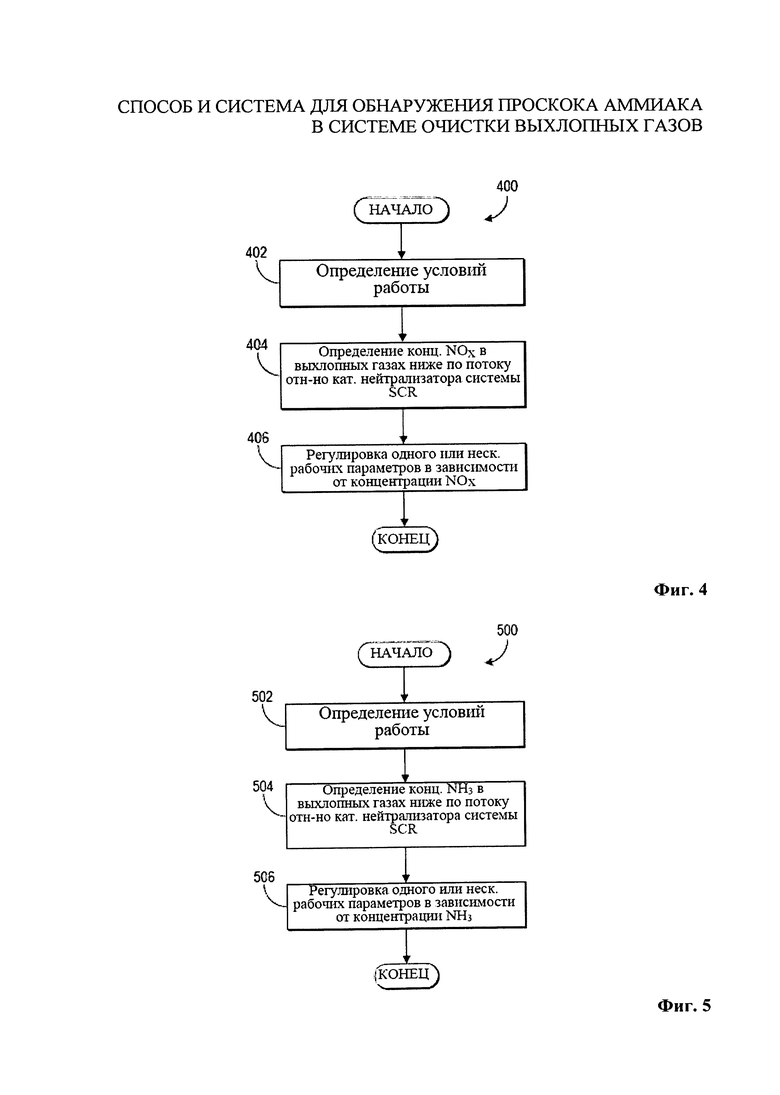
Переходя к Фиг. 4, там показана процедура регулировки работы системы на основании присвоения выходного сигнала датчика оксидам азота NOx. В частности, процедура определяет концентрацию NOx в выхлопных газах ниже по потоку от каталитического нейтрализатора системы SCR и регулирует одно или более условий работы на основании выходного сигнала датчика.
На этапе 402 определяют условия работы. Как описано выше, условия работы могут включать режимы работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, воздушно-топливное соотношение и т.д.) и параметры работы системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора системы SCR, величину впрыска мочевины и т.д.).
После определения условий работы процедура переходит на этап 404 и определяет концентрацию NOx в выхлопных газах после каталитического нейтрализатора системы SCR на основании выходного сигнала датчика выхлопных газов.
На этапе 406 на основании концентрации NOx регулируют один или более рабочих параметров. В качестве одного из примеров к условиям работы относятся величина EGR и объем или уровень впрыска мочевины, при этом уровень впрыска мочевины можно регулировать до тех пор, пока фактический выход NOx не совпадет с прогнозным выходом NOx. Например, объем EGR может быть увеличен на величину, соответствующую изменению количества NOx сверх порогового значения. Увеличивая объем EGR, можно добиться уменьшения выброса NOx двигателем, что приведет к уменьшению количества NOx, проходящего через каталитический нейтрализатор системы SCR. В еще одном примере количество впрыскиваемой мочевины может быть увеличено на величину, соответствующую изменению количества NOx сверх порогового значения и температуре каталитического нейтрализатора системы SCR. Количество впрыскиваемой мочевины может быть увеличено, например, путем изменения длительности импульса впрыскивания мочевины. За счет увеличения количества мочевины, впрыскиваемой в каталитический нейтрализатор системы SCR, каталитический нейтрализатор способен восстановить большее количество NOx, проходящего через нейтрализатор. В других примерах можно одновременно регулировать величину EGR и количество впрыскиваемой мочевины.
На Фиг. 5 показана процедура регулировки работы системы на основании присвоения выходного сигнала датчика аммиаку NH3. В частности, процедура определяет концентрацию NH3 в выхлопных газах ниже по потоку от каталитического нейтрализатора системы SCR и регулирует один или более рабочих параметров на основании выходного сигнала датчика.
На этапе 502 определяют условия работы. Как описано выше, условия работы могут включать режимы работы двигателя (например, скорость вращения двигателя, нагрузка двигателя, величина EGR, воздушно-топливное соотношение и т.д.) и параметры работы системы очистки выхлопных газов (например, температура выхлопных газов, температура каталитического нейтрализатора системы SCR, величина впрыска мочевины и т.д.).
После определения условий работы процедура переходит на этап 504 и определяет концентрацию NH3 в выхлопных газах ниже по потоку от каталитического нейтрализатора системы SCR на основании выходного сигнала датчика выхлопных газов.
На этапе 506 на основании концентрации NH3 регулируют один или более рабочих параметров. В качестве одного из не ограничивающих примеров к условиям работы относятся количество впрыскиваемой мочевины и величина EGR. Например, количество впрыскиваемой мочевины может быть уменьшено таким образом, что это приведет к сокращению излишка аммиака, проскакивающего из каталитического нейтрализатора системы SCR. Как описано выше, количество впрыскиваемой мочевины может быть увеличено путем изменения длительности импульса впрыскивания мочевины. В еще одном примере может быть уменьшена величина EGR. Например, уменьшая величину EGR, можно добиться увеличения выброса NOx двигателем. Увеличенное количество NOx может быть восстановлено за счет излишка аммиака в каталитическом нейтрализаторе системы SCR, что приведет к уменьшению количества NOx, проходящего через каталитический нейтрализатор системы SCR.
Что касается дозировки мочевины, в одном варианте осуществления изобретения выхлопной системой может быть адаптивная система SCR, в которой нужное адаптивное значение достигается путем регулировки уровня дозировки мочевины, пока фактический выход NOx не совпадет с прогнозным. Например, при увеличении количества NOx в выхлопной трубе рассчитанный выход NOx уменьшается. Если выход NOx упадет слишком низко, адаптивная система SCR в ответ увеличит дозировку мочевины для достижения прогнозного выхода NOx. С другой стороны, при увеличении уровней NH3 рассчитанный выход также уменьшается, поскольку NH3 выглядит для датчика NOx как NOx. По существу, адаптивная система в ответ уменьшает дозировку мочевины для достижения прогнозной эффективности. Поскольку адаптивная коррекция в случае с NOx отличается от коррекции в случае проскока NH3, система управления может зависеть от присвоения выходного сигнала датчика NOx оксидам азота NOx и аммиаку NH3 описанными выше способами.
Величина, на которую регулируют рабочие параметры, может также зависеть от температуры каталитического нейтрализатора системы SCR, так как точка насыщения мочевиной каталитического нейтрализатора зависит от температуры. Например, когда температура каталитического нейтрализатора относительно высокая, величина EGR может быть уменьшена сильнее, и/или количество впрыскиваемой мочевины может быть сокращено на меньшую величину. Напротив, когда температура каталитического нейтрализатора относительно низкая, величина EGR может быть увеличена сильнее и/или количество впрыскиваемой мочевины может быть сокращено на большую величину.
В других примерах может быть уменьшена только величина EGR, или увеличено только количество мочевины, впрыскиваемое в каталитический нейтрализатор системы SCR. В еще одном из примеров в качестве альтернативы или дополнения может быть выполнена регулировка одного или более других рабочих параметров. По существу, один или более рабочих параметров регулируют для уменьшения проскока NH3.
Можно отметить, что описанные здесь процедуры управления и оценки могут быть использованы при различных конфигурациях двигателей и/или транспортных средств. Описанные здесь конкретные процедуры могут представлять собой один или более из любого числа принципов обработки, таких как принцип событийного управления, управления прерываниями, многозадачный режим, многопоточный режим и прочие. По существу, различные действия, операции или функции могут быть выполнены в указанной последовательности, параллельно или, в некоторых случаях, пропущены. Аналогично, порядок действий не является обязательно необходимым для того, чтобы достичь признаков и преимуществ описанных здесь примерных вариантов выполнения, но он представлен для простоты иллюстрации и описания. Одно или более проиллюстрированных действий или функций может быть повторено в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически представлять код, программируемый в машиночитаемом носителе в системе управления двигателем.
Это завершает описание. При его изучении специалистам в области техники следует понимать, что допускаются различные изменения и модификации изобретения без выхода за рамки его сущности. Например, описанная выше технология может с выгодой применяться к двигателям I3, I4, I5, V6, V8, V10 и V12, работающим на природном газе, бензине, дизельном топливе или на альтернативном топливе.
Следующая ниже формула изобретения четко указывает определенные комбинации и подкомбинации, считающиеся новыми и неочевидными. В пунктах этой формулы изобретения может упоминаться «элемент» или «первый» элемент или его эквивалент. Эти пункты формулы должны пониматься как включение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены путем изменения данной формулы изобретения или путем представления новой формулы изобретения в этой или родственной заявке. Эта формула изобретения, с более широким, более узким, эквивалентным или другим объемом охраны по отношению к первоначальной формуле изобретения, также считается включенной в объект изобретения по настоящему раскрытию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА | 2015 |
|
RU2678239C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИРОВАНИЯ КОМПОНЕНТОВ СИСТЕМЫ ДООЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2665603C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ С СИСТЕМОЙ РЕЦИРКУЛЯЦИИ ВЫХЛОПНЫХ ГАЗОВ (ВАРИАНТЫ) | 2014 |
|
RU2647181C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УХУДШЕНИЯ РАБОТЫ ДАТЧИКА NOx ВЫХЛОПНЫХ ГАЗОВ ДВИГАТЕЛЯ | 2014 |
|
RU2607987C2 |
| СПОСОБЫ РАБОТЫ ДВИГАТЕЛЯ | 2013 |
|
RU2625605C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2632068C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ БЕНЗИНОВОГО ДВИГАТЕЛЯ ОБЕДНЕННОГО СГОРАНИЯ | 2013 |
|
RU2643275C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2620889C2 |
| ВЫХЛОПНАЯ СИСТЕМА, СОДЕРЖАЩАЯ КАТАЛИЗАТОР ПРЕДОТВРАЩЕНИЯ ПРОСКОКА АММИАКА В КОНТУРЕ РЕЦИРКУЛЯЦИИ ВЫХЛОПНЫХ ГАЗОВ | 2012 |
|
RU2591753C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗА ВЫХЛОПНЫМИ ГАЗАМИ | 2016 |
|
RU2628256C1 |

Предложены системы и способы обнаружения проскока аммиака. В одном из примеров выхлопная система содержит два датчика NOx и использует изменяющиеся отклики этих датчиков NOx для присвоения выходного сигнала датчика NOx на выхлопной трубе уровням NOx и NH3 в ней. Система включает в себя счетчик обнаружения проскока аммиака с амплитудно-частотными характеристиками, который определяет вероятность проскока NOx и NH3 по измеренным показаниям датчиков, которые далее обрабатываются контроллером для регулировки одного или более параметров на основании упомянутого присвоения и изменений выходного сигнала датчика. Изобретение позволяет обнаружить проскок NH3 в режиме реального времени с высокой чувствительностью обнаружения, без вклада NOx из подаваемого газа. 3 н. и 13 з.п. ф-лы, 8 ил.
1. Способ работы двигателя, содержащий:
присвоение выходного сигнала датчика NOx каждому из NH3 и NOx на основании расчета скоростей изменения NOx выше по потоку и ниже по потоку относительно выпускного устройства селективного каталитического восстановления (SCR),
определение ожидаемой скорости изменения NOx ниже по потоку, создание огибающей, окружающей ожидаемую скорость изменения NOx ниже по потоку, и
сравнение расчетной скорости изменения NOx ниже по потоку с ожидаемой скоростью изменения NOx ниже по потоку и огибающей, окружающей ожидаемую скорость изменения NOx ниже по потоку, при этом ожидаемую скорость изменения NOx ниже по потоку определяют на основании расчетной скорости изменения NOx выше по потоку; и
регулирование подачи восстановителя в выхлопные газы двигателя через инжектор на основании этого присвоения.
2. Способ по п. 1, причем большую часть выходного сигнала датчика NOx присваивают NOx, чем NH3, когда расчетная скорость изменения NOx ниже по потоку находится в пределах огибающей.
3. Способ по п. 1, причем первую часть выходного сигнала датчика NOx присваивают NOx, а вторую, оставшуюся часть выходного сигнала датчика NOx - NH3, причем подача восстановителя основана на каждой из первой и второй частей при разных регулировках для первой части по сравнению со второй частью.
4. Способ по п. 1, причем часть выходного сигнала датчика NOx присваивают NH3, когда расчетная скорость изменения NOx ниже по потоку находится за пределами огибающей.
5. Способ по п. 1, причем скорость изменения NOx выше по потоку определяют на основании датчика.
6. Способ по п. 1, причем присвоение дополнительно основано на счетчике, который количественно выражает сравнение расчетной скорости изменения NOx ниже по потоку и упомянутой огибающей.
7. Способ по п. 6, причем упомянутый счетчик линейно изменяется в отрицательную сторону до более низкого уровня, что свидетельствует о проскоке NOx, когда расчетная скорость изменения NOx ниже по потоку находится в пределах огибающей, и линейно изменяется в положительную сторону до более высокого уровня, что свидетельствует о проскоке NH3, когда расчетная скорость изменения NOx ниже по потоку находится за пределами огибающей.
8. Способ по п. 7, причем упомянутое присвоение основано на упомянутом счетчике относительно более высокого и более низкого уровней.
9. Способ по п. 8, причем на основании упомянутого присвоения регулируют дополнительный рабочий параметр.
10. Способ выполнения контроля проскока аммиака в режиме реального времени в выхлопной системе двигателя, содержащий:
присвоение выходного сигнала датчика NOx, расположенного ниже по потоку от выпускного устройства SCR, каждому из NH3 и NOx на основании:
прогнозирования скорости изменения NOx ниже по потоку от выпускного устройства SCR,
создания огибающей, которая окружает прогнозируемую скорость изменения, и сравнения фактической скорости изменения NOx ниже по потоку от выпускного устройства SCR с прогнозируемой скоростью изменения и огибающей, причем фактическая скорость изменения основана на выходном сигнале от датчика NOx ниже по потоку от выпускного устройства SCR; и
регулирование подачи восстановителя в выхлопные газы двигателя выше по потоку от выпускного устройства SCR через инжектор на основании упомянутого присвоения.
11. Способ по п. 10, дополнительно содержащий, если фактическая скорость изменения находится за пределами огибающей, окружающей прогнозируемую скорость изменения, определение того, что существует условие проскока NH3.
12. Способ по п. 11, причем прогнозируемая скорость изменения основана на скорости изменения NOx выше по потоку.
13. Способ по п. 12, причем прогнозируемая скорость изменения дополнительно основана на текущем выходном сигнале датчика NOx, расположенного ниже по потоку от выпускного устройства SCR, и текущем выходном сигнале датчика NOx, расположенного выше по потоку от выпускного устройства SCR.
14. Способ по п. 10, причем упомянутое присвоение дополнительно основано на счетчике, который количественно выражает сравнение фактической скорости изменения и прогнозируемой скорости изменения.
15. Способ по п. 10, причем упомянутая огибающая, окружающая прогнозируемую скорость изменения, состоит из отклонения положительной огибающей от прогнозируемой скорости изменения в положительном направлении и отклонения отрицательной огибающей от прогнозируемой скорости изменения в отрицательном направлении.
16. Система, включающая в себя:
двигатель с выхлопной системой,
систему очистки выхлопных газов, расположенную в выхлопной системе и содержащую выпускное устройство SCR, инжектор мочевины, расположенный выше по потоку от выпускного устройства SCR, датчик NOx, расположенный ниже по потоку от выпускного устройства SCR, и датчик NOx, расположенный выше по потоку от выпускного устройства SCR; и
систему управления, соединенную с системой очистки выхлопных газов, причем система управления содержит невременные инструкции для обнаружения проскока NH3 на основании переходного сигнала NOx, при этом обнаружение проскока NH3 включает в себя:
присвоение выходного сигнала датчика NOx, расположенного ниже по потоку от выпускного устройства SCR, каждому из NH3 и NOx и
регулирование впрыска восстановителя через инжектор мочевины в выхлопные газы двигателя выше по потоку от выпускного устройства SCR на основании упомянутого присвоения, причем упомянутое присвоение основано на:
сравнении огибающей, которая окружает ожидаемую скорость изменения NOx ниже по потоку от выпускного устройства SCR, и расчетной скорости изменения NOx ниже по потоку от выпускного устройства SCR,
причем, если расчетная скорость изменения NOx ниже по потоку от выпускного устройства SCR находится в пределах огибающей, определение того, что существует условие проскока NOx.
| US 2012017568 A1, 01.26.2012 | |||
| US 2011185707 A1, 08.04.2011 | |||
| СПОСОБ НИЗКОТЕМПЕРАТУРНОГО СЕЛЕКТИВНОГО КАТАЛИТИЧЕСКОГО ВОССТАНОВЛЕНИЯ NO УГЛЕВОДОРОДАМИ, СИСТЕМА ВЫХЛОПА ДЛЯ ОБРАБОТКИ NO И УСТРОЙСТВО | 2007 |
|
RU2442638C2 |

