ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящее изобретение является частичным продолжением заявки № 13/859,435 на выдачу патента США, «УЛУЧШЕННОЕ ОПРЕДЕЛЕНИЕ ПРОСАЧИВАНИЯ АММИАКА В РЕАЛЬНОМ ВРЕМЕНИ», поданной 9 апреля 2013 года, полное содержание которой настоящим включено в состав посредством ссылки во всех отношениях.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение по существу относится к определению просачивания аммиака в системе очистки выхлопных газов, включенной в систему выпуска двигателя внутреннего сгорания.
УРОВЕНЬ ТЕХНИКИ
Дизельные транспортные средства могут быть оборудованы системой очистки выхлопных газов, которая, например, может включать в себя основанную на мочевине систему избирательного каталитического восстановления (SCR) и один или более датчиков выхлопных газов, таких как датчики оксидов азота (NOx), по меньшей мере один из которых может быть расположен ниже по потоку от системы SCR. Когда система SCR загружена мочевиной до точки насыщения, которая меняется с температурой, система SCR может начинать допускать просачивание аммиака (NH3). Просачивание NH3 из системы SCR может выявляться датчиком NOx в выхлопной трубе в качестве NOx, давая в результате неточный выходной сигнал NOx, который слишком велик. По существу, эффективность системы SCR на самом деле может быть более высокой, чем эффективность, определяемая на базе неточного выходного сигнала NOx.
В US 2012/0085083 (МПК F01N 3/18, опубл. 12.04.2012) описан способ оценивания нейтрализации NOx с использованием полиномиальной модели, которая также обеспечивает оценку концентрации NH3 на находящемся ниже по потоку датчике NOx в выхлопной трубе. Как описано в материалах настоящего описания, временные регистрируемые характеристики датчика NOx в подаваемых газах, расположенного выше по потоку от SCR, и датчика NOx в выхлопной трубе, расположенного ниже по потоку от SCR, количественно определяются и аппроксимируются с использованием полиномиальной модели, которая делает возможной оценку просачивания NH3 и эффективности нейтрализации NOx. Однако так как способ использует сегмент каждого сигнала датчика для обработки, временное запаздывание существует между получением каждого выходного сигнала датчика NOx и отнесением выходного сигнала находящегося ниже по потоку датчика NOx к NOx и к NH3. Когда временное запаздывание объединяется с описанным алгоритмом полиномиальной аппроксимации, который может быть предрасположенным к локальным ошибкам оценки, реализация системы определения просачивания NH3 в реальном времени посредством описанных способов была бы трудной для осуществления.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Авторы выявили недостатки у подхода, приведенного выше, и в материалах настоящего описания предложили способы управления в реальном времени просачиванием аммиака в системе выпуска двигателя.
В одном из аспектов предложен способ, включающий в себя этапы, на которых:
относят выходной сигнал датчика NOx к каждому из NH3 и NOx на основании скорости изменения NOx в местоположении выше по потоку и скорости изменения NOx в местоположении ниже по потоку относительно устройства избирательного каталитического восстановления (SCR) выхлопных газов, причем отнесение основано на длине сегмента определяемого переходного сигнала; и
регулируют восстановитель к выпуску двигателя на основании отнесения.
В одном из вариантов предложен способ, в котором длину сегмента определяемого переходного сигнала рассчитывают в окне, применяемом при заданном множестве условий, причем обработка дополнительно включает в себя этап, на котором многократно перемещают окно вдоль определяемого переходного сигнала, при этом размер окна является регулируемым по одному или более из постоянной времени и модификатора постоянной времени.
В одном из вариантов предложен способ, в котором расчет длины сегмента в окне включает в себя этап, на котором формируют траекторию сигнала для аппроксимации определяемого переходного сигнала, причем рассчитанная длина сегмента основана на траектории сигнала, которая аппроксимирует определяемый переходный сигнал.
В одном из вариантов предложен способ, в котором относят большую величину выходного сигнала датчика NOx к NOx, чем к NH3, когда соотношение измеренной ниже по потоку траектории сигнала NOx, которая аппроксимирует измеренную ниже по потоку скорость изменения, больше, чем пороговое значение относительно ожидаемой траектории сигнала NOx в местоположении ниже по потоку, которая аппроксимирует ожидаемую скорость изменения NOx в местоположении ниже по потоку.
В одном из вариантов предложен способ, в котором ожидаемая ниже по потоку скорость изменения NOx основана на скорости изменения NOx в местоположении выше по потоку.
В одном из вариантов предложен способ, в котором скорость изменения NOx в местоположении выше по потоку определяют посредством по меньшей мере одного из датчика и модели.
В одном из вариантов предложен способ, в котором относят большую величину выходного сигнала датчика NOx к NH3, чем к NOx, когда соотношение траекторий сигналов падает ниже порогового значения, причем соотношение ниже порогового значения указывает высокую вероятность NH3, присутствующего в выпуске двигателя.
В одном из вариантов предложен способ, в котором отнесение включает в себя этап, на котором относят первую часть выходного сигнала датчика NOx к NOx, а вторую, оставшуюся часть выходного сигнала датчика NOx к NH3, при этом подача восстановителя основана на каждой из первой и второй частей, с разными регулировками для первой части по сравнению со второй частью.
В одном из вариантов предложен способ, для которого дополнительно включен в состав счетчик, который линейно убывает до нижнего уровня, указывающего просачивание NH3, когда соотношение переходных сигналов падает ниже порогового значения, и линейно возрастает до верхнего уровня, указывающего просачивание NOx, когда соотношение превышает пороговое значение.
В одном из вариантов предложен способ, в котором отнесение основано на счетчике относительно нижнего уровня и верхнего уровня.
В одном из вариантов предложен способ, в котором один или более рабочих параметров регулируют на основании отнесения.
В одном из вариантов предложен способ, для которого контроллер содержит постоянные команды для осуществления способа.
В одном из дополнительных аспектов предложен способ, включающий в себя этапы, на которых:
управляют в реальном времени просачиванием аммиака в системе выпуска двигателя на основании отнесения выходного сигнала датчика NOx к каждому из NH3 и NOx, основанного на скорости изменения NOx в местоположении выше по потоку от устройства SCR выхлопных газов и скорости изменения NOx в местоположении ниже по потоку от устройства SCR выхлопных газов, причем отнесение основано на длине сегмента переходных сигналов NOx; и
регулируют подачу восстановителя к выпуску двигателя на основании отнесения.
В одном из вариантов предложен способ, в котором отнесение основано на сравнении ожидаемой скорости изменения NOx в местоположении ниже по потоку и измеренной скорости изменения NOx в местоположении ниже по потоку, причем ожидаемая скорость изменения NOx в местоположении ниже по потоку основана на скорости изменения NOx в местоположении выше по потоку, определяемой посредством по меньшей мере одного из датчика и модели, а сравнение дополнительно основано на длине сегмента переходных сигналов NOx.
В одном из вариантов предложен способ, в котором сравнение дополнительно основано на соотношении длины сегмента, определяемой для измеренной скорости изменения NOx в местоположении ниже по потоку, и длины сегмента, определяемой для ожидаемой скорости изменения NOx в местоположении ниже по потоку.
В одном из вариантов предложен способ, в котором отнесение выходного сигнала датчика NOx к каждому из NH3 и NOx основано на соотношении определяемых длин сегментов для измеренного и ожидаемого сигналов NOx.
В одном из вариантов предложен способ, в котором по меньшей мере часть выходного сигнала датчика NOx относят к NH3, когда соотношение определяемых длин сегментов для измеренного и ожидаемого сигналов NOx падает ниже порогового значения, которое указывает наличие NH3.
В одном из вариантов предложен способ, в котором пороговое значение, указывающее наличие NH3, составляет 1,0.
В одном из вариантов предложен способ, в котором один или более рабочих параметров регулируют на основании отнесения.
В одном из еще дополнительных аспектов предложена система, содержащая:
двигатель с системой выпуска;
систему очистки выхлопных газов, расположенную в системе выпуска и включающую в себя устройство SCR выхлопных газов, форсунку для мочевины, расположенную выше по потоку от устройства SCR выхлопных газов, и датчик выхлопных газов, расположенный ниже по потоку от устройства SCR выхлопных газов; и
систему управления в соединении с датчиком выхлопных газов, система управления содержит постоянные команды для определения просачивания NH3 на основании переходного сигнала NOx, при этом определение просачивания NH3 включает в себя отнесение выходного сигнала датчика к каждому из NH3 и NOx, и регулировку одного или более рабочих параметров на основании отнесения, причем отнесение дополнительно основано на сравнении ожидаемой скорости изменения NOx и измеренной скорости изменения NOx в местоположении ниже по потоку от устройства SCR выхлопных газов, и уровня NOx в местоположении выше по потоку от устройства SCR выхлопных газов, система управления дополнительно выполнена с возможностью работы в двух рабочих режимах для определения отнесения, при этом два режима включают в себя:
первый режим, осуществляемый при первом наборе условий, который обрабатывает переходные сигналы NOx на основании длины сегмента переходного сигнала NOx, и
второй режим, осуществляемый при втором наборе условий, который обрабатывает переходные сигналы NOx на основании отнесения большей величины выходного сигнала датчика NOx к NOx, чем на аммиак, когда измеренная скорость изменения NOx в местоположении ниже по потоку находится в пределах ожидаемой огибающей, основанной на уровне NOx в местоположении выше по потоку.
Описанные способы используют переходные характеристики датчика NOx для идентификации скоростей изменения сигнала NOx. Затем, процессор дополнительно использует скорости изменения сигналов NOx для определения, каким образом ожидается, что находящийся ниже по потоку датчик NOx в выхлопной трубе должен изменяться, на основании потока выхлопных газов выше по потоку от SCR, что предоставляет возможность отнесения датчика NOx в выхлопной трубе описанным в материалах настоящего описания образом. Авторы выявили, что существует компромисс между чувствительностью и точностью при обработке переходных сигналов. По этой причине, раскрытый метод длины сегмента повышает чувствительность сигнала наряду с сохранением высокой степени точности, в частности, при низких температурах выхлопных газов, что предоставляет возможность для улучшенной обработки сигналов во время слабо нагруженных циклов двигателя. В дополнение, авторы дополнительно выявили, что метод огибающей может иметь пониженную чувствительность, нежели метод длины сегмента в некоторых случаях, поскольку ошибки фазирования заставляют огибающие быть большими вследствие фазирования. Более того, метод огибающей восприимчив к деактивации во время направленных изменений переходного сигнала, которые могут давать в результате пониженную точность в некоторых случаях. Таким образом, раскрытый метод длины сегмента более устойчив к шум-факторам и ошибкам фазирования, и, таким образом, может иметь более высокую чувствительность без существенного снижения точности. В качестве одного из примеров, авторы обнаружили, что чувствительность метода длины сегмента к определению аммиака составляет ~10 частей на миллион, тогда как чувствительность метода огибающей составляет ~25-30 частей на миллион. В одном из конкретных примеров, система выпуска включает в себя датчики NOx, которые непрерывно контролируют поток выхлопных газов выше по потоку и ниже по потоку от устройства с SCR. Затем, когда удовлетворены начальные условия системы двигателя, например, когда устройство с SCR находится выше порогового значения температуры, скорость изменения находящегося выше по потоку датчика NOx в подаваемых газах комбинируется с текущим показанием в выхлопной трубе, чтобы оценивать скорость изменения датчика NOx в выхлопной трубе, ожидаемую на основании наклона сигнала в подаваемых газах. Ожидаемый сигнал NOx в выхлопной трубе затем сравнивается с реальным сигналом NOx, чтобы относить выходной сигнал датчика NOx к NOx и NH3 с использованием одного или более из метода огибающей и метода длины сегмента, раскрытых в материалах настоящего описания и подробно описанных ниже.
В еще одном примере, предусмотрен способ, который содержит отнесение выходного сигнала датчика NOx к каждому из NH3 и NOx на основании скорости изменения NOx в местоположении выше по потоку и скорости изменения NOx в местоположении ниже по потоку относительно устройства SCR выхлопных газов, который, в силу этого, предоставляет количеству восстановителя, подаваемого в выпуск двигателя, возможность регулироваться на основании относительных сигналов датчиков. Так как способ использует переходные характеристики находящихся выше по потоку и ниже по потоку датчиков NOx, в дополнение к ожидаемому сигналу NOx, поэтому, возможно добиваться высокого уровня определения NH3. Таким образом, можно обеспечивать улучшенное отнесение выходного сигнала датчика NOx, чтобы определять относительные уровни NOx и NH3 в системе выпуска.
Настоящее описание может давать несколько преимуществ. В частности, метод длины сегмента может предоставлять возможность для определения в реальном времени просачивания NH3 с высоким уровнем чувствительности определения без высоких вмешательств в NOx в подаваемых газах наряду с сохранением точности определения. Таким образом, просачивание NH3 может выявляться, в то время как транспортное средство находится в действии, а исправительные меры предприниматься на основании текущего состояния системы выпуска. Более того, так как чувствительность определения повышена, высокие уровни NOx не требуются, чтобы определять отнесение выходного сигнала датчика NOx в выхлопной трубе к NOx и NH3.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего подробного описания, когда воспринимаются по отдельности или в связи с прилагаемыми чертежами. Следует понимать, что раскрытие изобретения, приведенное выше, представлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества, описанные в материалах настоящего описания, будут полнее понятны по прочтению примера варианта осуществления, указанного в материалах настоящего описания как описание предпочтительных вариантов осуществления изобретения, когда воспринимаются по отдельности или со ссылкой на чертежи, где:
фиг. 1 показывает схематичное изображение двигателя, содержащего систему выпуска с системой очистки выхлопных газов;
фиг. 2A-D показывает графики, иллюстрирующие состояние просачивания аммиака, определяемое посредством метода огибающей;
фиг. 3 показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для определения просачивания аммиака посредством метода огибающей в системе очистки выхлопных газов;
фиг. 4 показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для управления рабочими параметрами, когда выходной сигнал датчика выхлопных газов отнесен на оксид азота;
фиг. 5 показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для управления рабочими параметрами, когда выходной сигнал датчика выхлопных газов отнесен на аммиак;
фиг. 6A-D и 7A-D показывают графики, иллюстрирующие условия просачивания NOx и NH3, соответственно, определяемые посредством метода длины сегмента;
фиг. 8A-E показывают примерный сигнал выхлопных газов в условиях высокого просачивания NH3 в выхлопной трубе согласно способу;
Фиг. 9 показывает блок-схему последовательности операций способа, иллюстрирующую процедуру для определения просачивания аммиака системы очистки выхлопных газов согласно методу длины сегмента; и
фиг. 10 показывает блок-схему, иллюстрирующую процедуру для работы системы управления в разных режимах обработки согласно раскрытым способам, чтобы относить выходной сигнал датчика выхлопных газов к NOx и аммиак.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Последующее описание относится к способам и системам для определения просачивания NH3 из системы SCR на основании переходных сигналов NOx, определенных в ней. В одном из примеров, описан способ, который содержит использование информации с двух датчиков NOx, датчика в подаваемых газах, расположенного выше по потоку SCR, и датчика в выхлопной трубе, расположенного ниже по потоку, для прогнозирования наклона NOx в выхлопной трубе в ответ на переходный сигнал NOx в подаваемых газах. В одном из конкретных примеров, раскрыт метод длины сегмента, который дополнительно содержит сравнение спрогнозированной (или ожидаемой) скорости изменения NOx в местоположении ниже по потоку с измеренной скоростью изменения NOx в местоположении ниже по потоку посредством метода длины сегмента и отнесение выходного сигнала с датчика NOx к каждому из аммиака и оксида азота в разных количествах в зависимости от определенных переходных сигналов. Ради простоты и ясности, относят большую величину выходного сигнала датчика NOx к NOx, чем к NH3, когда соотношение измеренной скорости изменения NOx в местоположении ниже по потоку относительно ожидаемой скорости изменения NOx в местоположении ниже по потоку превышает пороговое значение. В альтернативном варианте осуществления, способ содержит формирование огибающей вокруг ожидаемого сигнала NOx в выхлопной трубе и отнесение выходного сигнала с датчика NOx к каждому из аммиака и оксида азота в разных величинах в зависимости от изменений выходного сигнала датчика. Например, переходный выходной сигнал датчика в выхлопной трубе, который выпадает за пределы ожидаемой огибающей, указывает систему выпуска, которая стравливает NH3, что дополнительно определяется количественно посредством линейного положительного изменения счетчика в направлении верхнего уровня, который указывает просачивание NH3. Наоборот, переходный выходной сигнал датчика в выхлопной трубе, попадающий в пределы ожидаемой огибающей, указывает утечку NOx, которая дополнительно определяется количественно посредством линейного отрицательного изменения счетчика в направлении нижнего уровня, который указывает просачивание NOx. Таким образом, датчик выхлопных газов может использоваться для указания как сниженной эффективности системы очистки выхлопных газов, так и состояния просачивания NH3. Описанные способы дополнительно содержат регулировку одного или более рабочих параметров на основании определяемого отнесения и изменений выходного сигнала датчика.
Далее, со ссылкой на фиг. 1, проиллюстрировано схематичное изображение, показывающее один цилиндр многоцилиндрового двигателя 10, который может быть включен в силовую установку автомобиля. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Камера 30 (или цилиндр) сгорания двигателя 10 может включать в себя стенки 32 камеры сгорания с поршнем 36, расположенным в них. Поршень может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камера 30 сгорания может принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и может выпускать газообразные продукты сгорания выхлопных газов через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
В примере, изображенном на фиг. 1, впускной клапан 52 и выпускной клапан 54 могут управляться посредством приведения в действие кулачков через соответствующие системы 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из систем переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), регулируемой установки фаз клапанного распределения (VVT) и/или регулируемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 может определяться датчиками 55 и 57 положения, соответственно. В альтернативных вариантах осуществления, впускной клапан 52 и/или выпускной клапан 54 могут управляться посредством возбуждения клапанного распределителя с электромагнитным управлением. Например, цилиндр 30, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством возбуждения клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может быть выполнен с одной или более топливных форсунок для подачи топлива в него. В качестве неограничивающего примера, показан цилиндр 30, включающий в себя одну топливную форсунку 66. Топливная форсунка 66 показана присоединенной непосредственно к цилиндру 30 для впрыска топлива непосредственно в него пропорционально ширине импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно как непосредственный впрыск (в дальнейшем, также указываемый ссылкой как «DI») топлива в цилиндр 30 сгорания.
Будет приниматься во внимание, что, в альтернативном варианте осуществления, форсунка 66 может быть форсункой оконного впрыска, выдающей топливо во впускное окно выше по потоку от цилиндра 30. Следует принимать во внимание, что цилиндр 30 может принимать топливо из множества форсунок, таких как множество форсунок оконного впрыска, множество форсунок непосредственного впрыска или их комбинацию.
В одном из примеров, двигатель 10 является дизельным двигателем, который сжигает воздух и дизельное топливо благодаря воспламенению от сжатия. В других неограничивающих вариантах осуществления, двигатель 10 может осуществлять сгорание разного топлива, в том числе, бензина, биодизельного топлива или спиртосодержащей топливной смеси (например, бензина и этилового спирта или бензина и метилового спирта) благодаря воспламенению от сжатия и/или искровому зажиганию.
Впускной канал 42 может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере, положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, заключенный дросселем 62, конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, среди других цилиндров двигателя. Положение дроссельной заслонки 64 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответствующих сигналов MAF и MAP в контроллер 12.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции выхлопных газов (EGR) может направлять требуемую порцию выхлопных газов из выпускного канала 48 во впускной канал 42 через канал 140 EGR. Количество EGR, выдаваемой во впускной коллектор 44, может меняться контроллером 12 посредством клапана 142 EGR. Например, посредством ввода выхлопных газов в двигатель, количество имеющегося в распоряжении кислорода для сгорания уменьшается, тем самым, понижая температуры пламени сгорания и уменьшая формирование NOx. Как изображено, система EGR дополнительно включает в себя датчик 144 EGR, который может быть расположен внутри канала 140 EGR и может выдавать показание одного или более из давления, температуры, концентрации выхлопных газов. В некоторых условиях, система EGR может использоваться для стабилизации температуры смеси воздуха и топлива в пределах камеры сгорания, таким образом, предусматривая способ регулирования установки момента воспламенения во время некоторых режимов сгорания. Кроме того, во время некоторых условий, часть выхлопных газов может удерживаться или захватываться в камере сгорания посредством регулирования установки фаз распределения выпускных клапанов, к примеру, посредством управления механизмом регулируемой установки фаз клапанного распределения.
Система 128 выпуска включает в себя датчик 126 выхлопных газов, присоединенный к выпускному каналу 48 выше по потоку от системы 150 очистки выхлопных газов. Датчик 126 может быть любым подходящим датчиком для выдачи показания отношения количества воздуха к количеству топлива выхлопных газов, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик NOx, HC или CO. Система 150 очистки выхлопных газов показана расположенной вдоль выпускного канала 48 ниже по потоку от датчика 126 выхлопных газов.
В примере, показанном на фиг. 1, система 150 очистки выхлопных газов является основанной на мочевине системой избирательного каталитического восстановления (SCR). Система SCR, например, включает в себя по меньшей мере каталитический нейтрализатор 152 с SCR, резервуар 154 хранения мочевины и датчик 156 мочевины. В других вариантах осуществления, система 150 очистки выхлопных газов может дополнительно или в качестве альтернативы включать в себя другие компоненты, такие как сажевый фильтр, уловитель обедненных NOx, трехкомпонентный каталитический нейтрализатор, различные устройства снижения токсичности выхлопных газов или их комбинации. В изображенном примере, форсунка 156 для мочевины выдает мочевину из резервуара 154 для хранения мочевины. Однако, могут использоваться различные альтернативные подходы, такие как твердая гранулированная мочевина, которая вырабатывает пары аммиака, которые затем нагнетаются или дозируются в каталитический нейтрализатор 152 с SCR. В кроме того еще одном примере, уловитель обедненных NOx может быть расположен выше по потоку от каталитического нейтрализатора 152 с SCR для формирования NH3 для каталитического нейтрализатора 152 с SCR в зависимости от уровня или обогащения отношения количества воздуха к количеству топлива, подаваемого в уловитель обедненных NOx.
Система 150 очистки выхлопных газов дополнительно включает в себя датчик 158 выхлопных газов, расположенный ниже по потоку от каталитического нейтрализатора 152 с SCR. В изображенном варианте осуществления, датчик 158 выхлопных газов может быть датчиком NOx, например, для измерения количества NOx после SCR. В некоторых примерах, эффективность системы SCR, например, может определяться на основании датчика 158 выхлопных газов, а кроме того, на основании датчика 126 выхлопных газов (например, когда датчик 126 выхлопных газов измеряет NOx), расположенного выше по потоку от системы SCR. В других примерах, датчик 158 выхлопных газов может быть любым пригодным датчиком для определения концентрации составляющих выхлопных газов, таким как датчик UEGO, EGO, HEGO, HC, CO, и т.д.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 110 и шину данных. Контроллер 12 может находиться в соединении с, а потому, принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение засасываемого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру хладагента двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя; сигнал абсолютного давления в коллекторе, MAP, с датчика 122; и концентрации составляющих выхлопных газов с датчиков 126 и 158 выхлопных газов. Сигнал скорости вращения двигателя, RPM, может формироваться контроллером 12 из сигнала PIP.
Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано постоянными машиночитаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
В одном из примеров, контроллер 12 может выявлять просачивание NH3 на основании выходного сигнала с датчика 158 выхлопных газов, как будет описано подробнее ниже со ссылкой на фиг. 2. В качестве примера, когда датчик 158 выявляет пороговое увеличение выходного сигнала NOx, контроллер 12 регулирует клапан 142 EGR для уменьшения величины EGR, чтобы выбросы NOx из двигателя 10 возрастали. На основании изменения выходного сигнала датчика в течение периода уменьшенной EGR, выходной сигнал датчика относится к NOx или NH3. Например, если выходной сигнал датчика увеличивается, выходной сигнал относится к NOx, так как увеличенные NOx из двигателя не восстанавливаются системой SCR. С другой стороны, если выходной сигнал датчика не изменяется на более чем пороговую величину, выходной сигнал относится к NH3, и указывается просачивание NH3. На основании изменения выходного сигнала и отнесения, контроллер 12 может регулировать один или более рабочих параметров двигателя. В качестве неограничивающих примеров, контроллер 12 может регулировать величину EGR и/или подачу восстановителя на основании изменения выходного сигнала и отнесения.
Как описано выше, фиг. 1 показывает один цилиндр многоцилиндрового двигателя, и каждый цилиндр может подобным образом включать в себя свой собственный набор впускных/выпускных клапанов, топливную форсунку, свечу зажигания, и т.д.
С обращением к графикам, показанным на фиг. 2A-D, показан примерный переходный сигнал NOx, который изображает состояние просачивания аммиака для системы двух датчиков по фиг. 1. Так как датчики NOx вырабатывают выходные сигналы в ответ на оба, NOx и NH3, способ определения просачивания NH3 может быть полезным для управления отдачей системы выпуска и ресурсов в ней. Например, если система SCR загружена мочевиной до точки насыщения, которая меняется в зависимости от температуры, она может начинать стравливать NH3. NH3, просачивающийся за SCR, может считываться датчиком NOx в выхлопной трубе в качестве NOx, который приводит в замешательство систему управления и контроля SCR представлением, что система имеет более низкую эффективность, чем она имеет в самом деле, поскольку некоторая часть сигнала фактически обусловлена NH3.
На фиг. 2A-D, показаны четыре временных графика, которые иллюстрируют способ. Четыре графика связаны, а потому, используют одну и ту же временную ось, которая, для простоты, показана вдоль нижнего графика. Более того, хотя данные схематично показаны в зависимости от времени в секундах, единица времени не является ограничивающей, и возможны другие единицы времени. Сверху вниз, четыре графика представляют: сигналы NOx, собранные датчиками NOx в системе выпуска выхлопных газов; графики производной спрогнозированного и действующего наклона датчика NOx в выхлопной трубе согласно способу; график, показывающий разность между спрогнозированной и действующей кривизной датчика NOx в выхлопной трубе; и счетчик с пороговым значением для указания просачивания NH3.
На фиг. 2A, примерный сигнал 202 в подаваемых газах показан пунктирным, а примерный сигнал 204 в выхлопной трубе показан сплошным. Когда система 128 выпуска находится в состоянии просачивания NOx, например, когда SCR не насыщена, и NH3 не выпускается в систему выпуска, сигнал в выхлопной трубе по существу может быть пропорциональным сигналу в подаваемых газах. По существу, сигнал NOx в подаваемых газах и сигнал NOx в выхлопной трубе могут находиться в фазе и близко придерживаться друг друга. Более того, когда эффективность нейтрализации NOx является по существу нулевой, сигнал 204 в выхлопной трубе и сигнал 202 в подаваемых газах могут быть по существу идентичными. Наоборот, что касается более высоких эффективностей нейтрализации NOx, форма сигнала 204 в выхлопной трубе может иметь сходство с формой сигнала 202 в подаваемых газах, но быть уменьшенным вариантом сигнала в подаваемых газах. В качестве альтернативы, когда система 128 выпуска находится в состоянии просачивания NH3, сигнал 204 в выхлопной трубе может иметь несколько уплощенный внешний вид или быть волнообразным на более низкой частоте, чем сигнал 202 в подаваемых газах. Вследствие этого, во время просачивания NH3, обычно есть период времени, где два сигнала сдвинуты по фазе. Хотя сигнал в выхлопной трубе может превышать сигнал в подаваемых газах, в частности, после повышения температуры, это как правило происходит во время переходных или меняющихся условий, которые предоставляют просачиванию NH3 возможность идентифицироваться по двум сигналам посредством способа, описанного в материалах настоящего описания.
Способ полагается на переходную характеристику датчиков NOx, чтобы относить сигнал к NH3 и NOx. Поэтому, центральным признаком способа является скорость изменения сигнала NOx в зависимости от времени, или d(NOx)/dt. Фиг. 2B показывает график производной, на котором наклон или скорость изменения сигнала 204 в выхлопной трубе на фиг. 2A графически изображены в зависимости от времени. Определение переходного NH3 строится вокруг сравнения определенного реального наклона NOx в выхлопной трубе с спрогнозированным ожидаемым наклоном NOx в выхлопной трубе. По существу, фиг. 2B включает в себя реальный наклон 210, который представляет скорость изменения сигнала 204 в выхлопной трубе по фиг. 2A. Реальный наклон 210 показан в четырех частях, помеченных a-d по причинам, которые будут подробнее описаны ниже. Способ дополнительно включает в себя предсказывание наклона NOx в выхлопной трубе с использованием наклона NOx в подаваемых газах (по сигналу 202 в подаваемых газах на фиг. 2A) и текущего сигнала NOx в выхлопной трубе или мгновенного показания с датчика в выхлопной трубе. Спрогнозированный наклон 212 для датчика NOx в выхлопной трубе, например, датчика 158 на фиг. 1, может формироваться с использованием известной зависимости. В материалах настоящего описания, наклон NOx в выхлопной трубе предсказывается с использованием:
(dTPNOx/dt)exp=(TP/FG)*(dFGNOx/dt)act,
где (dTPNOx/dt)exp - ожидаемая или спрогнозированная скорость изменения сигнала в выхлопной трубе, TP - мгновенное показание в выхлопной трубе, FG - мгновенное показание в подаваемых газах, и (dFGNOx/dt)act - реальная скорость изменения сигнала в подаваемых газах. С использованием этого способа, сравнение двух сигналов наклона, основанных на переходных характеристиках датчиков NOx, предоставляет возможность высокого уровня чувствительности определения NH3. Например, в некоторых вариантах осуществления, способ определения переходной характеристики может выявлять уровни NH3 не выше 25 частей на миллион.
Для измерения, насколько близок реальный наклон 210 к спрогнозированному наклону 212 во время работы, другими словами, до какой степени определенное изменение сигнала NOx соответствует изменению, ожидаемому от сигналов в подаваемых газах, и эффективности системы, описанный способ определения просачивания аммиака (ASD) включает в себя формирование огибающей вокруг спрогнозированной кривой наклона. Огибающая определяет область вокруг спрогнозированной скорости изменения, где выходной сигнал NOx вероятно должен падать, когда система находится в состоянии просачивания NOx. Поэтому, фиг. 2B показывает две штрих-пунктирные линии, которые представляют положительную огибающую 214, смещенную от спрогнозированного наклона в положительном направлении, и отрицательную огибающую 216, смещенную от спрогнозированного наклона в отрицательном направлении. Когда взяты вместе, обе, положительная и отрицательная, огибающие определяют область вокруг кривой спрогнозированной скорости изменения, которая предоставляет возможность для разграничения и оценивания сигнала уровней NOx и NH3 в системе выпуска.
Возвратимся к реальному наклону 210, который показан в четырех частях, помеченных a-d. Разные области кривой обозначают периоды времени, когда удовлетворены начальные условия, так что может ожидаться, что сравнение между двумя кривыми наклона может должно давать точные определения уровней NOx и NH3 в системе выпуска. Например, датчики 126 и 158 в пределах системы 128 выпуска присоединены к контроллеру 12, который может включать в себя постоянные машиночитаемые данные, представляющие команды, исполняемые процессором 102 для активации и деактивации способа на основании условий работы двигателя. Поэтому, кривые 210a и 210c показаны в качестве сегментов нежирной пунктирной линии, чтобы представлять примерные периоды, где начальные условия не удовлетворены, а способ деактивирован. Наоборот, кривые 210b и 210d показаны в качестве сегментов полужирной пунктирной линии, чтобы представлять примерные периоды, где удовлетворены начальные условия, и активирован способ. Когда приведен в действие, контроллер обрабатывает данные посредством сравнения реального наклона 210 с спрогнозированным наклоном 212 и окружающей огибающей. В своей основе, когда реальный наклон 210 попадает в пределы огибающей, счетчик окон линейно убывает и подвергается отрицательному приращению в направлении нуля, чтобы указывать, что система выпуска содержит NOx, тогда как, когда реальный наклон выпадает за пределы огибающей, счетчик окон линейно возрастает и подвергается положительному приращению в направлении верхнего уровня дальше от нуля, чтобы указывать наличие просачивание NH3 в системе выпуска.
В некоторых вариантах осуществления, во время условий просачивания NH3, система выпуска может включать в себя сигнал датчика NOx в выхлопной трубе, содержащий более низкочастотный спектр относительно сигнала в подаваемых газах. Вследствие этого, частота в выхлопной трубе более высокого уровня может быть указывающей просачивание NH3. Поэтому, когда реальный наклон 210 больше, чем пороговое значение частоты, может указываться высокочастотный спектр, который интерпретируется в качестве сигнала NOx. В ответ, счетчик окон может подвергаться отрицательному приращению в направлении нуля, чтобы указывать просачивание NOx независимо от того, попадает ли наклон в пределы или за пределы огибающей. Например, в некоторых вариантах осуществления, скорость изменения (dTPNOx/dt)actual (реальный наклон 210 на фиг. 2B), большая, чем максимально допустимая скорость, может обрабатываться в качестве ответной реакции NOx от системы.
На фиг. 2C, показан график 220 разности, который отражает относительную разность между реальным наклоном 210 и спрогнозированным наклоном 212 по фиг. 2B. Ради ясности, горизонтальная линия при y=0, которая указывает отсутствие разности, также показана. На ней, колебания реального наклона относительно спрогнозированного наклона могут наблюдаться яснее. Например, в ранние моменты времени слева, наблюдается отрицательный пик, который отражает более низкий реальный наклон, чем предсказывался способом (например, реальный наклон 210 меньше, чем спрогнозированный наклон 212). После этого, придерживаясь контура графика разности, реальный наклон колеблется вблизи спрогнозированного наклона на основании условий в системе выпуска. Хотя и не показано, в некоторых вариантах осуществления, другие горизонтальные линии пороговых значений также могут быть включены в состав, чтобы дополнительно указывать места, где разности между двумя графиками существенно велики.
С обращением к фиг. 2D, показан график счетчика окон, который используется для указания просачивания NH3. Как вкратце описано выше, когда система ASD активирована контроллером 12, счетчик окон получает приращение в направлении верхнего уровня, который указывает просачивание NH3, когда реальный наклон 210 выпадает за пределы огибающей, и получает отрицательное приращение в направлении нижнего уровня, который указывает просачивание NOx, когда реальный наклон 210 попадает в пределы огибающей. Поэтому, счетчик 230 окон показан возрастающим, когда реальный наклон 210b выпадает за пределы огибающей. На фиг. 2D, показаны два пороговых значения. Первое пороговое значение 236 указывает просачивание NH3 в системе выпуска. По существу, когда счетчик окон превышает первое пороговое значение 236, флажковый признак NH3 устанавливается, чтобы указывать, что NH3 просачивается из SCR. Для простоты, в этом примерном способе, флажковый признак NH3 является двоичным флажковым признаком. Поэтому, когда счетчик 230 окон больше, чем первое пороговое значение 236, флажковый признак NH3 устанавливается в 1. В качестве альтернативы, когда счетчик 230 окон падает ниже первого порогового значения 236, флажковый признак NH3 сбрасывается в 0. В показанном примерном применении обработки сигналов, система определения активируется в двух областях, идентифицированных под 210b и 210d. В течение этих периодов, счетчик является действующим, и контроллер использует состояние системы для идентификации, происходит или нет просачивание NH3. В некоторых вариантах осуществления, относительная величина счетчика 230 окон по сравнению с первым пороговым значение 236 может использоваться для указания, когда система 128 выпуска является стравливающей NH3 наряду с тем, что, в других вариантах осуществления, мгновенное расположение счетчика 230 окон относительно верхнего уровня (указывающего NH3) и нижнего уровня (например, 0, указывающего NOx) может использоваться для указания вероятности или степени просачивания NH3 в системе выпуска. В кроме того других вариантах осуществления, второе пороговое значение 234 может быть включено в состав, которое находится ниже, чем первое пороговое значение 236. Когда присутствует второе пороговое значение 234, флажковый признак NH3 может сбрасываться в 0, когда счетчик 230 окон падает ниже второго порогового значения 234 вместо первого порогового значения 236, как было описано выше. Разные пороговые значения предоставляют возможность гистерезиса в системе, таким образом, флажковый признак NH3 не сбрасывается, чтобы указывать NOx, если счетчик 230 окон падает на короткое время ниже первого порогового значения 236. Скорее, NOx указывается, когда счетчик 230 окон падает ниже нижнего порогового значения, которое установлено, чтобы указывать более высокую степень просачивания NOx в системе выпуска.
Так как система определения просачивания аммиака находится под управлением контроллера 12, команды для деактивации системы определения могут быть включены в программируемое программное обеспечение, хранимое системой управления. Хотя система определения может деактивироваться на основании многих возможных условий работы, и возможны многие комбинации переменных, в одном из вариантов осуществления, программируемые команды могут реализовывать следующие условия для деактивации системы определения: низкую температуру SCR, высокие уровни NOx в подаваемых газах, указывающие насыщенный выходной сигнал датчика в подаваемых газах, высокие уровни NOx в выхлопной трубе, указывающие насыщенный выходной сигнал датчика в выхлопной трубе, низкие уровни NOx в подаваемых газах или выхлопной трубе ниже порога обнаружения, высокую или низкую скорости изменения эффективности нейтрализации NOx, низкий крутящий момент, выдаваемый системой двигателя, низкие импульсы впрыска мочевины из резервуара для хранения, допускающую калибровку задержку после того, как датчик в подаваемых газах или датчик в выхлопной трубе становятся действующими, высокую скорость изменения объемной скорости, низкий поток выхлопных газов, минимальный/максимальный реальный или спрогнозированный наклон, указывающие зону нечувствительности определенного сигнала, и низкую скорость изменения NOx в подаваемых газах, которая идентифицирует точки перегиба в подаваемых газах. В ответ на определение одного или более из этих условий контроллером 12, способ ASD может деактивироваться, таким образом, обработка сигналов не происходит описанным в материалах настоящего описания образом. Например, реальный наклон 210c указывает ссылкой на сигнал наклона, полученный в течение периода, когда система определения деактивирована. В качестве еще одного примера, линия 232 является двоичной линией, указывающей деактивированное состояние системы. Поэтому, когда линия 232 по существу находится на оси x, система ASD активирована, и контроллер 12 может контролировать условия на выпуске уже описанным образом. Наоборот, когда линия 232 находится выше оси x, система ASD может деактивироваться, чтобы обработка сигналов не происходила. По существу, дальнейшая обработка сигнала NOx в выхлопной трубе по существу запрещена, поскольку полученная информация не достоверно выражает уровни NOx и NH3 в системе выпуска. В течение периодов, где система определения деактивирована, система управления по-прежнему может контролировать условия в системе выпуска, а кроме того, обладает гибкостью вводить в действие систему определения, что, в некоторых случаях, может включать в себя игнорирование программного обеспечения или условий деактивации, идентифицированных в материалах настоящего описания.
С обращением к способу обработки сигналов NOx системой управления, на фиг. 3, показана блок-схема последовательности операций способа, иллюстрирующая примерный способ 300 для определения просачивания аммиака в системе очистки выхлопных газов. В ней, описан набор программируемых решений, которые контроллер может использовать при отнесении сигнала датчика на один из NOx или NH3, либо их комбинацию.
На этапе 302, способ 300 включает в себя определение условий работы двигателя. Условия работы могут включать в себя как условия работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, отношение количества воздуха к количеству топлива, и т.д.), так и условия системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора с SCR, величину впрыска мочевины, и т.д.).
На этапе 304, способ 300 включает в себя определение спрогнозированной скорости изменения датчика NOx в выхлопной трубе и формирование огибающей на основании ожидаемого наклона. Как описано выше, скорость изменения датчика NOx в выхлопной трубе может предсказываться с использованием сигнала датчика NOx в подаваемых газах и текущего измерения выходного сигнала датчика NOx в выхлопной трубе. Затем, на основании спрогнозированной скорости изменения датчика NOx, способ дополнительно может формировать огибающую для определения области, в которой может ожидаться, что сигнал должен падать, когда система выпуска является работающей в условиях просачивания NOx. Хотя могут быть задуманы многие способы формирования огибающей, в некоторых вариантах осуществления, огибающая является просто процентной долей спрогнозированного наклона, которая смещена от спрогнозированного наклона в положительном и отрицательном направлениях. Например, контроллер, который определяет область в пределах 5% спрогнозированного наклона 10,0, может формировать положительную огибающую со значением 10,5 и отрицательную огибающую со значением 9,5. В качестве альтернативы, если спрогнозированный наклон меньше, например, 1,0, положительная огибающая может иметь значение 1,05, а отрицательная огибающая может иметь значение 0,95. Таким образом, огибающая будет определять область, окружающую спрогнозированную кривую, которая находится в пределах 5% от кривой. Возвращаясь к огибающей по фиг. 2B, размер области, определяемой огибающей, явно отклоняется по мере того, как величина наклона спрогнозированной кривой колеблется около нуля. На этапе 306, способ 300 включает в себя определение реальной скорости изменения датчика NOx в выхлопной трубе.
Хотя способ 300 может контролировать датчики NOx часто, или даже непрерывно, контроллер 12 также может активировать или деактивировать систему, уже описанным образом со ссылкой на фиг. 2B. По существу, на этапе 308, способ 300 включает в себя определение, были ли удовлетворены начальные условия. Если контроллер 12 определяет, что начальные условия предоставляют возможность, чтобы точные измерения производились системой определения, например, так как температура SCR находится выше порогового значения, то система ASD может вводиться в действие. Поэтому, на этапе 310, введенная в действие система включает в себя активацию счетчика окон, чтобы сравнивать реальный наклон с спрогнозированным наклоном, как указано на этапе 312. В качестве альтернативы, если контроллер 12 определяет, что точное измерение посредством системы NOx не возможно, на основании условий, определенных в системе двигателя, на этапе 314, система управления может деактивировать счетчик, чтобы дальнейшая обработка сигналов не происходила после обнаружения сигнала. В некоторых вариантах осуществления, когда система ASD деактивирована, счетчик может сбрасываться посредством линейного отрицательного изменения счетчика, чтобы указывать просачивание NOx через систему. В других вариантах осуществления, счетчик может не изменяться линейно описанным выше образом, но просто сохранять значение до тех пор, пока система определения не подвергнута возобновлению работы.
Возвращаясь на этапе 312, на котором контроллер 12 определил, что начальные условия были удовлетворены, и система определения введена в действие, чтобы предоставлять возможность регулировки счетчика на основании сравнения между реальной и спрогнозированной скоростями NOx, как только сравнение выполнено, на этапе 318, контроллер может быть запрограммирован определять, попадает ли реальный наклон в пределы огибающей. Затем, на основании расположения реального наклона относительно огибающей, положительный или отрицательный счет может назначаться на основании относительных разностей. Как подробнее описано выше со ссылкой на фиг. 2D, на этапе 320, счетчик изменяется линейно положительно в направлении верхнего уровня, который указывает просачивание NH3, когда реальный наклон выпадает за пределы огибающей, тогда как, на этапе 316, счетчик линейно убывает в направлении нижнего уровня (например, нуля), указывающего просачивание NOx, когда измеренная скорость попадает в пределы огибающей.
После линейного изменения счетчика на основании относительного расположения действующего наклона по сравнению с огибающей, окружающей спрогнозированную скорость изменения, на этапе 322, способ 300 дополнительно сравнивает счетчик с пороговым значением, чтобы определять, должен ли датчик NOx в выхлопной трубе отнесен к NOx или к NH3. В одном из вариантов осуществления, отнесение датчика включает в себя отнесение первой части выходного сигнала датчика NOx к NOx, а второй, оставшейся части выходного сигнала датчика NOx на аммиак. Затем, на основании отнесения, подают восстановитель в выпуск двигателя на основании каждой из первой и второй частей. Например, восстановитель может увеличиваться в ответ на повышенный NOx, но уменьшаться в ответ на повышенный NH3. Поэтому, количеств впрыскиваемого восстановителя по существу зависит от относительных величин, указанных первой и второй частями.
Если счетчик находится выше первого порогового значения, например, первого порогового значения 236 на фиг. 2D, На этапе 324 контроллер 12 может относить по меньшей мере некоторую величину выходного сигнала в выхлопной трубе на просачивание NH3 и устанавливать флажковый признак для указания такового на этапе 326. В качестве альтернативы, если контроллер 12 определяет, что счетчик падает ниже первого порогового значения, на этапе 328, он может относить по меньшей мере некоторую величину выходного сигнала в выхлопной трубе на просачивание NOx и устанавливать флажковый признак для указания такового на этапе 330. В некоторых вариантах осуществления, текущее состояние отнесения датчика может соответствовать вероятности просачивания NH3 наряду с тем, что, в других вариантах осуществления, просачивание NH3 может указываться двоичным флажковым признаком. Таким образом, контроллер 12 может выявлять просачивание аммиака в системе выпуска и относить выходной сигнал датчика NOx на один или оба из NOx и NH3, тем временем, сообщая текущее состояние водителю и регулируя один или более рабочих параметров на основании выходного сигнала датчика.
Продолжая по фиг. 4, показана процедура для регулировки работы системы на основании отнесения выходного сигнала датчика к NOx. Более точно, процедура определяет концентрацию NOx в выхлопных газах ниже по потоку от каталитического нейтрализатора с SCR и регулирует один или более рабочих параметров на основании выходного сигнала датчика.
На этапе 402, определяются условия работы. Как описано выше, условия работы могут включать в себя условия работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, отношение количества воздуха к количеству топлива, и т.д.) и условия системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора с SCR, величину впрыска мочевины, и т.д.).
Как только условия работы определены, процедура переходит на этап 404, и концентрация NOx в выхлопных газах ниже по потоку от каталитического нейтрализатора с SCR определяется на основании выходного сигнала датчика выхлопных газов.
На этапе 406, один или более рабочих параметров регулируются на основании концентрации NOx. В качестве неограничивающих примеров, рабочие параметры могут включать в себя величину EGR и величину впрыска мочевины, или уровень дозирования, при этом уровень дозирования мочевины может регулироваться до тех пор, пока действующая эффективность по NOx не соответствует спрогнозированной эффективности по NOx. Например, величина EGR может увеличиваться на величину, соответствующую изменению количества NOx выше порогового количества. Посредством увеличения величины EGR, меньшее количество NOx может выбрасываться двигателем, давая в результате уменьшенное количество NOx, проходящих сквозь каталитический нейтрализатор с SCR. В качестве еще одного примера, величина впрыска мочевины может увеличиваться на величину, соответствующую изменению количества NOx выше порогового количества и температуре каталитического нейтрализатора с SCR. Величина впрыска мочевины, например, может увеличиваться посредством изменения продолжительности времени импульса или продолжительности впрыска мочевины. Посредством увеличения количества мочевины, впрыскиваемой в каталитический нейтрализатор с SCR, большее количество NOx может восстанавливаться каталитическим нейтрализатором, тем самым, уменьшая количество NOx, которое проходит сквозь каталитический нейтрализатор. В других примерах, может регулироваться комбинация EGR и величины впрыска мочевины.
На фиг. 5, показана процедура для регулировки работы системы на основании отнесения выходного сигнала датчика к NH3. Более точно, процедура определяет концентрацию NH3 в выхлопных газах ниже по потоку от каталитического нейтрализатора с SCR и регулирует один или более рабочих параметров на основании выходного сигнала датчика.
На этапе 502, определяются условия работы. Как описано выше, условия работы могут включать в себя условия работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, отношение количества воздуха к количеству топлива, и т.д.) и условия системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора с SCR, величину впрыска мочевины, и т.д.).
Как только рабочие параметры определены, процедура переходит на этап 504, и концентрация NH3в выхлопных газах ниже по потоку от каталитического нейтрализатора с SCR определяется на основании выходного сигнала датчика выхлопных газов.
На этапе 506, один или более рабочих параметров регулируются на основании концентрации NH3. В качестве неограничивающих примеров, рабочие параметры могут включать в себя величину впрыска мочевины и величину EGR. Например, величина впрыска мочевины может уменьшаться, чтобы уменьшалось количество избыточного NH3, которое просачивается из каталитического нейтрализатора с SCR. Как описано выше, величина впрыска мочевины может увеличиваться посредством изменения длительности импульса или продолжительности впрыска мочевины. В качестве еще одного примера, величина EGR может уменьшаться. Например, посредством уменьшения величины EGR, большее количество NOx может выбрасываться из двигателя. Увеличенные NOx могут восстанавливаться избыточным NH3 в каталитическом нейтрализаторе с SCR, тем самым, уменьшая количество NOx, которые проходят через каталитический нейтрализатор с SCR.
Что касается дозирования мочевины, в одном из вариантов осуществления, система выпуска может быть адаптивной системой SCR, которая добивается надлежащего адаптивного значения посредством регулировки уровня дозирования мочевины до тех пор, пока действующая эффективность по NOx не соответствует спрогнозированной эффективности по NOx. Например, по мере того, как уровни NOx в выхлопной трубе возрастают, рассчитанная эффективность по NOx убывает. Если эффективность падает слишком низко, адаптивная система реагирует повышением дозирования мочевины, чтобы добиваться спрогнозированной эффективности по NOx. Наоборот, по мере того, как возрастают уровни NH3, рассчитанная эффективность также убывает, поскольку NH3 похож к NOx для датчика NOx. По существу, адаптивная система реагирует снижением дозирования мочевины, чтобы добиваться спрогнозированной эффективности. Так как адаптивная поправка является разной для NOx в зависимости от просачивания NH3, система управления может зависеть от отнесения выходного сигнала датчика NOx к NOx и к NH3 способами, описанными в материалах настоящего описания.
Величина, на которую регулируются рабочие параметры, кроме того, может быть основана на температуре каталитического нейтрализатора с SCR, так как точка насыщения мочевиной каталитического нейтрализатора меняется в зависимости от температуры. Например, когда температура каталитического нейтрализатора является относительно более высокой температурой, величина EGR может уменьшаться в меньшей степени, и/или величина впрыска мочевины может уменьшаться на меньшую величину. В противоположность, когда температура каталитического нейтрализатора является относительно более низкой температурой, величина EGR может увеличиваться в большей степени, и/или величина впрыска мочевины может уменьшаться на большую величину.
В других примерах, может только уменьшаться величина EGR, или может только увеличиваться количество мочевины, впрыскиваемой в каталитический нейтрализатор с SCR. В кроме того других примерах, один или более рабочих параметров могут регулироваться дополнительно или в качестве альтернативы. По существу, один или более рабочих параметров регулируются, чтобы уменьшать просачивание NH3.
Далее, с обращением к описанию метода длины сегмента, фиг. 6-8 показывают примерные графики для иллюстрации, каким образом переходные сигналы могут обрабатываться на основании определения длины сегмента, чтобы определять отнесение находящегося ниже по потоку датчика NOx к NOx и к NH3. Например, фиг. 6 и 7 показывают графики, иллюстрирующие метод длины сегмента в условиях просачивания NOx и NH3, соответственно. Затем, фиг. 8 показывает примерный временной сигнал на выпуске в условиях высокого просачивания NH3 в выхлопной трубе, чтобы продемонстрировать способ в системе выпуска выхлопных газов. Фиг. 9 показывает примерную блок-схему последовательности операций способа у процедуре для определения просачивания аммиака системы очистки выхлопных газов посредством метода длины сегмента.
Метод длины сегмента включает в себя получение части выходного сигнала NOx, а кроме того, дополнительную обработку переходных сигналов для определения отнесения NOx и/или аммиака. Как описано выше со ссылкой на метод огибающей, метод длины сегмента также обрабатывает ожидаемый и измеренный сигналы NOx в местоположении ниже по потоку, чтобы определять отнесение. Однако, вместо формирования огибающей вокруг спрогнозированного сигнала NOx, чтобы определять отнесение, метод длины сегмента взамен полагается на расчет общей длины сегмента для траектории сигнала в пределах скользящего окна, который применяется, когда удовлетворен заданный набор условий. Например, когда температура каталитического нейтрализатора с SCR находится выше порогового значения температуры, контроллер 12 может определять отнесение выхлопных газов на основании полученных сигналов. Одно из преимуществ метода длины сегмента включает в себя этап, на котором отнесение выходного сигнала датчика NOx может определяться на более низких температурах выхлопных газов, например, во время слабо нагруженных циклов, когда температуры выхлопных газов остаются низкими (например, T=215°C) относительно температур выхлопных газов полностью прогретого двигателя (например, T>250°C). Как описано ниже, обработка дополнительно включает в себя повторное перемещение окна вдоль каждого переходного сигнала для обработки переходных сигналов до тех пор, пока удовлетворены условия активации, которые предоставляют возможность, чтобы отнесение выходного сигнала датчика и, таким образом, рабочие регулировки, производились в реальном времени по мере того, как получаются переходные сигналы. Таким образом, способы предоставляют возможность для высоко эффективной системы очистки выхлопных газов, имеющей высокую чувствительность к NOx и NH3 без существенного ухудшения точности сигнала.
Фиг. 6A-D показывают графики, иллюстрирующие условия просачивания NOx и NH3, соответственно, определяемые посредством метода длины сегмента; Для простоты, фиг. 6A показывает примерный сигнал 202 в подаваемых газах пунктирным, а примерный сигнал 204 в выпускной трубе сплошным. Как отмечено выше, когда система 128 выпуска находится в состоянии просачивания NOx, например, так как SCR не насыщена, и NH3 не выпускается в систему выпуска, сигнал в выхлопной трубе может быть пропорциональным сигналу в подаваемых газах. По существу, сигнал NOx в подаваемых газах и сигнал NOx в выхлопной трубе могут близко придерживаться друг друга. Сигналы, которые близко придерживаются друг друга, также могут иметь длины сегментов, которые близко придерживаются друг друга. По этой причине, может ожидаться, что соотношение сигналов или длин сегментов должно иметь соотношение 1,0, когда разность между измеренным сигналом NOx в местоположении ниже по потоку и ожидаемым сигналом NOx в местоположении ниже по потоку невелика. Подобным образом, более низкое соотношение указывает, что реальное количество NOx, измеренное ниже по потоку, находится ниже, чем ожидаемое на основании сигнала NOx в местоположении выше по потоку, что обусловлено наличием аммиака в системе выпуска выхлопных газов. Так как способ полагается на переходные характеристики датчиков NOx для отнесения выходных сигналов датчиков на тот или другой из NH3 или NOx, фиг. 6B показывает график производной для реального наклона 210 (например, наклона 210a-d по фиг. 2B) или скорости изменения сигнала в выхлопной трубе в зависимости от времени. Определение переходного NH3 строится вокруг сравнения определенного реального наклона NOx в выхлопной трубе с спрогнозированным ожидаемым наклоном NOx в выхлопной трубе. Таким образом, фиг. 6C дополнительно показывают ожидаемый или спрогнозированный наклон 212, который представляет ожидаемую скорость изменения сигнала в выхлопной трубе на основании находящегося ниже по потоку датчика NOx.
Хотя контроллер 12 может быть выполнен с возможностью контролировать систему выпуска и два датчика NOx непрерывно, чтобы контролировать поток выхлопных газов выше по потоку и ниже по потоку от устройства с SCR, способы по существу полагаются на отнесение датчиков выхлопных газов к NOx и аммиак при заданном наборе условий, которые также указываются ссылкой как условия активации. Фиг. 6B и 6C указывают условия активации схематично первым окноом 604 и вторым окноом 606, которые представляют периоды времени, в течение которых был удовлетворен заданный набор условий, и значит, определения условий на выпуске могут выполняться достоверно. Для простоты, два скользящих окно показаны для каждого полученного переходного сигнала (например, спрогнозированного и реального сигналов NOx), однако, во время обработки сигналов на борту системы выпуска, скользящий окно может многократно перемещаться вдоль оси x, которая указывает время, чтобы длина сегмента полученного сигнала в пределах скользящего окна рассчитывалась непрерывно. В качестве альтернативы, так как условия внутри системы выпуска выхлопных газов часто изменяются, условия активации могут удовлетворяться в некоторые моменты времени, но не удовлетворяться в другие моменты времени. В таких динамических условиях на выпуске, контроллер 12 может быть выполнен с возможностью обрабатывать переходные сигналы поблизости. То есть, контроллер может обрабатывать временные области переходного сигнала, которые находятся в непосредственной близости друг от друга, но которые не являются соприкасающимися и не являются непрерывными с предыдущим сегментом. Таким образом, обрабатываемые временные области могут быть рядом друг с другом, но не быть непрерывными друг с другом. Однако, переходные сигналы могут контролироваться непрерывно в реальном времени, чтобы контролировать условия в системе выпуска выхлопных газов. Для простоты, показано скользящее окно 604, имеющее постоянный размер на фиг. 6B и 6C. Однако размер скользящего окна дополнительно может регулироваться постоянными времени и модификаторами постоянной времени в других примерах.
Чтобы определять отнесение выходного сигнала датчика, то есть, часть сигнала, обусловленную наличием NOx и NH3, метод длины сегмента дополнительно включает в себя расчет общей длины сегмента в пределах временного окна для полученных сигналов. Например, фиг. 6B и 6C показывают длины 612 и 614 сегментов, перекрывающие реальную и спрогнозированную траектории в пределах первого скользящего окна 604. Затем, в течение второго периода времени, показаны длины 622 и 624 сегментов, перекрывающие траектории в пределах второго окна 606. Таким образом, фиг. 6B и 6C показывают два примерных расчета по методу длины сегмента.
На основании сигналов, показанных и только что описанных, метод 900 длины сегмента, который подробнее описан ниже, дополнительно включает в себя сравнение измеренной ниже по потоку скорости изменения NOx с ожидаемой ниже по потоку скоростью изменения NOx, чтобы определять отнесение, относят большую величину выходного сигнала датчика NOx к NOx, чем к NH3, когда соотношение измеренной скорости изменения NOx в местоположении ниже по потоку больше, чем пороговое значение, относительно ожидаемой скорости изменения NOx в местоположении ниже по потоку. По этой причине, фиг. 6D показывает соотношение TP для длин сегментов, рассчитанных в пределах каждого скользящего окна (например, первого и второго скользящих окон). Что касается первого скользящего окна, в течение которого рассчитываются и сравниваются длины 612 и 614 сегментов, первое соотношение 616 показано на фиг. 6D. Подобным образом, длины 622 и 624 сегментов рассчитываются и сравниваются для формирования второго соотношения 626. Таким образом, соотношения длин сегментов используются для сравнения действующего и спрогнозированного сигналов. В качестве одного из примеров, когда соотношение приближается к 1,0 (или большему значению), реальное количество NOx в пределах системы больше, чем ожидаемое количество NOx, определяемое на основании находящегося выше по потоку датчика NOx. По существу, вероятность NOx в системе выпуска выхлопных газов является более высокой, и отнесение выходного сигнала датчика отражает это, относя выходной сигнал датчика к NOx. Таким образом, согласно описанным способам, рассчитанные соотношения длин сегментов (например, первое соотношение 616 и второе соотношение 626) дополнительно могут сравниваться с пороговым значением соотношения, указанным пороговым значением 630. Таким образом, если первое соотношение 616 и/или второе соотношение 626 являются большими, чем пороговое значение 630, как показано, контроллер 12 относит выходной сигнал датчика к NOx. В качестве альтернативы, если первое соотношение 616 и/или второе соотношение 626 падают ниже порогового значения 630, как показано в примере по фиг. 7, контроллер 12 относит выходной сигнал датчика к NH3.
Что касается отнесения сигнала к NOx и аммиак, контроллер 12 дополнительно может быть выполнен с возможностью обрабатывать переходные сигналы с использованием метода длины сегмента, чтобы относить первую часть выходного сигнала датчика NOx к NOx, а вторую, оставшуюся часть выходного сигнала датчика NOx к NH3, как подробнее описывалось выше со ссылкой на метод огибающей. Однако, для простоты, описанная последовательность операций описывает отнесение сигнала на тот или другой из NOx или NH3. На основании отнесения первой и/или второй части, подача восстановителя может регулироваться на основании каждой из первой и второй частей, причем, разные регулировки производятся для первой части по сравнению с второй частью. Таким образом, в некоторых примерах, счетчик также может быть включен в метод длины сегмента, который линейно убывает до нижнего уровня, указывающего просачивание NH3 (или NOx, в зависимости от того, каким образом реализуется способ), когда соотношение переходных сигналов падает ниже порогового значения 630, и линейно возрастает до верхнего уровня, который указывает просачивание NOx, когда соотношение превышает пороговое значение 630. Таким образом, отнесение может быть основано на счетчике относительно нижнего и верхнего уровней. Как уже отмечено, один или более рабочих параметров могут регулироваться на основании отнесения, и контроллер может быть запрограммирован постоянными командами для выполнения обработки посредством раскрытого метода длины сегмента.
Для сравнения, фиг. 7A-D показывают графики, иллюстрирующие условия просачивания NH3, определяемые посредством метода длины сегмента. Например, фиг. 7A показывает примерный сигнал 204 в выхлопной трубе сплошным, а ожидаемый сигнал 702, основанный на находящемся выше по потоку датчике NOx, пунктирным. Ожидаемый сигнал 701 показан временно колеблющимся, что может происходить, например, в ответ на повышение или понижение крутящих моментов (или нагрузок) двигателя, когда транспортное средство едет на работу в транспортном потоке высокой плотности. Сигнал 204 в выхлопной трубе, измеренный находящимся ниже по потоку датчиком NOx показан движущимся волнообразно менее часто, так как он контролирует находящиеся ниже по потоку условия в выхлопной трубе. Таким образом, два показанных сигнала не придерживаются близко друг друга и являются разными вследствие наличия аммиака в выхлопных газах.
Фиг. 7B показывает реальный наклон 210, основанный на сигнале 204 в выхлопной трубе, наряду с тем, что фиг. 7C показывает спрогнозированный наклон 710. Скользящие окна также показаны таким же образом, как описано выше со ссылкой на фиг. 6B и 6C. Таким образом, длина 712 сегмента иллюстрирует общую длину сигнала 204 в выхлопной трубе в пределах первого скользящего окна, а длина 714 сегмента иллюстрирует общую длину спрогнозированного наклона 210 в пределах скользящего окна. Так как сигнал в подаваемых газах, а потому, спрогнозированный наклон 710 часто колеблется в окне, общая длина сегмента траектории сигнала может находиться выше относительно измеренной траектории сигнала. Таким образом, соотношение рассчитанных длин сегментов дает меру близости реального сигнала к ожидаемому сигналу, которая дает указание количества NOx и/или аммиака, присутствующих в системе выпуска. Фиг. 7D иллюстрирует, каким образом соотношение рассчитанных длин сегментов может использоваться для определения отнесения на основании соотношения относительно порогового значения 630, которое меньше, чем 1,0, но, в некоторых случаях, также может иметь значение 1,0 или большее. В показанном примере, так как первое соотношение 716 и второе соотношение 726 падают ниже порогового значения 630, измерительные точки указывают просачивание аммиака, которое может выгодно обнаруживаться наряду с тем, что рабочие регулировки производятся на основании отнесения.
Фиг. 8A-E показывают примерный сигнал выхлопных газов в условиях высокого просачивания NH3 в выхлопной трубе согласно описанным способам; Для простоты, сигналы NOx не показаны на фиг. 8 наряду с тем, что спрогнозированный наклон 802 и реальный наклон 810 показаны на разных графиках ради ясности. Таким образом, фиг. 8A показывает временной профиль спрогнозированного наклона 802, определяемого на основании скорости изменения NOx в местоположении выше по потоку. Подобным образом, фиг. 8B показывает временной профиль реального наклона 810, который измерен находящимся ниже по потоку датчиком NOx. Фиг. 8C - график заданных длин сегментов для каждой из кривых, отмеченных выше, которые рассчитаны в пределах скользящего окна, как описано выше со ссылкой на фиг. 6 и 7. Таким образом, фиг. 8C иллюстрирует, каким образом длины сегментов могут быть графически изображены на основании общей длины, рассчитанной в окне по мере того, как окно перемещается вдоль траекторий переходного сигнала, предусмотренных на фиг. 8A и B. Кривая 820 соответствует длинам сегментов, рассчитанным по спрогнозированному наклону 802 на фиг. 8A. Подобным образом, кривая 822 соответствует длинам сегментов, рассчитанным по реальному наклону 804 на фиг. 8B. Фиг. 8D - одиночная кривая, представляющая соотношение длин сегментов в каждый момент времени по фиг. 8C. Таким образом, траектория 832 соотношения отражает соотношение траекторий длин сегментов, предусмотренных на фиг. 8C, и, тем самым, дает временное указание условий в системе выпуска выхлопных газов, как описано выше. Пороговое значение 830 на фиг. 8D иллюстрирует точку, выше которой соотношение рассчитанных длин сегментов указывает условия просачивания NOx. Наоборот, соотношения, падающие ниже порогового значения 830, указывают условия просачивания NH3. Фиг. 8E показывает двоичную траекторию 840, которая указывает условия просачивания NH3 и NOx. Для простоты, нулевой сигнал указывает, условия высокого NOx, а сигнал 1,0 указывает условия высокого NH3. Примерный сигнал выхлопных газов, показанный на графиках по фиг. 8, представляет условия высокого просачивания NH3. Хотя обрабатываемые сигналы относятся на один из NOx или NH3 на основании определяемых соотношений относительно порогового значения, в других примерах, часть сигнала может относиться к NOx и/или NH3 на основании рассчитанных соотношений длин сегментов. Другими словами, может быть включен в состав счетчик, который линейно убывает до ниже уровня, указывающего просачивание NH3, когда соотношение переходных сигналов падает ниже порогового значения, и линейно возрастает до верхнего уровня, указывающего просачивание NOx, когда соотношение превышает пороговое значение, отнесение основано на счетчике относительно нижнего и верхнего уровней.
Что касается временных сигналов, показанных относительно оси x, время возрастает слева направо. Таким образом, до T1 (например, от момента 0 времени до T1), заданный набор условий не был удовлетворен, например, так как транспортное средство было запущено после холодного запуска и, таким образом, температура SCR падает ниже порогового значения температуры. Хотя сигналы могут контролироваться в течение этого периода времени, контроллер 12 может не обрабатывать обнаруженные сигналы.
В T1, соотношение рассчитанных длин сегментов, представленное траекторией 832 соотношения, падает ниже порогового значения 830. Таким образом, контроллер 12 относит выходной сигнал на аммиак и указывает таковое посредством переключения двоичной траектории 840 на 1,0, которая указывает просачивание аммиака. В T2, траектория 832 соотношения ненадолго превышает пороговое значение 830. Двоичная траектория 840 перестраивается на 0, чтобы указывать просачивание NOx. Хотя показанный способ иллюстрирует двоичную траекторию 840, изменяемую в ответ на траекторию 832 соотношения, превышающую пороговое значение 830, в других вариантах осуществления, способ дополнительно включает в себя второе пороговое значение или временной порог для предотвращения идентификации изменения условий на выпуске на основании коротких или скоротечных флуктуаций в системе выпуска выхлопных газов, которые, вообще говоря, не представляют изменяющиеся условия выхлопных газов. Для простоты, показанные переходные сигналы включают в себя одно пороговое значение. В T3, траектория 832 соотношения вновь падает ниже порогового значения 830, и двоичная траектория 840 вновь перестраивается, чтобы представлять определенные условия просачивания аммиака. Время от T4 до T5 представляет состояние системы выпуска выхлопных газов, в котором NOx выпускается в больших количествах. В ответ, контроллер 12 осуществляет надлежащие регулировки на основании определенных условий и указывает таковые, обновляя двоичную траекторию 840. В качестве одного из примеров, когда определены условия просачивания NOx, подача восстановителя на основании отнесения может регулироваться, чтобы противодействовать высоким уровням NOx. Таким образом, система может использоваться для уменьшения выбросов из раскрытой системы выпуска выхлопных газов, что предоставляет возможность для повышенной эффективности. В T5, траектория 832 соотношения падает ниже порогового значения 830, и двоичная траектория 840 перестраивается, чтобы представлять просачивание аммиака. В ответ, подача восстановителя может вновь регулироваться, чтобы противодействовать определенным высоким уровням NH3.
С обращением к описанию способов, проиллюстрированных только что, фиг.9 показывает блок-схему последовательности операций метода 900 длины сегмента, который является процедурой для определения просачивания аммиака в системе очистки выхлопных газов согласно способам, описанным выше. В ней, набор программируемых решений, которые контроллер может использовать при отнесении сигнала датчика на один из NOx или NH3, либо их комбинацию на основании длины сегмента полученного переходного сигнала NOx, описан подробнее.
На этапе 902, способ 900 включает в себя определение условий работы двигателя. Условия работы могут включать в себя как условия работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, отношение количества воздуха к количеству топлива, и т.д.), так и условия системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора с SCR, величину впрыска мочевины, и т.д.).
На этапе 904, способ 900 включает в себя определение спрогнозированной скорости изменения находящегося ниже по потоку датчика NOx в выхлопной трубе на основании скорости изменения NOx в местоположении выше по потоку. Как описано выше, скорость изменения датчика NOx в выхлопной трубе может предсказываться с использованием сигнала датчика NOx в подаваемых газах и текущего измерения выходного сигнала датчика NOx в выхлопной трубе. Затем, на этапе 906, способ 900 включает в себя определение реальной скорости изменения датчика NOx в выхлопной трубе. Таким образом, на основании спрогнозированной скорости изменения датчика NOx в выхлопной трубе и реальной скорости изменения находящегося ниже по потоку датчика NOx, способ дополнительно включает в себя контроль измеренных и спрогнозированных сигналов NOx в местоположении ниже по потоку от каталитического нейтрализатора с SCR. Как уже отмечено, сравнение может достоверно указывать отнесение выходного сигнала датчика к NOx и/или аммиак, а потому, служить для определения, эксплуатируется ли система выпуска выхлопных газов в условиях, которые порождают просачивание NOx и/или аммиака.
Хотя способ 900 может контролировать датчики NOx часто, или даже непрерывно, контроллер 12 также может активировать или деактивировать вычислительную систему для обработки смежных сегментов, которые не являются сплошными, но которые могут быть рядом друг с другом в некоторых случаях. По существу, на этапе 910, способ 900 включает в себя определение, были ли удовлетворены начальные условия. Если контроллер 12 определяет, что начальные условия предоставляют возможность, чтобы точные измерения производились системой определения, например, так как температура SCR находится выше порогового значения, то система ASD, основанная на способе длин сегментов, может вводиться в действие. На этапе 912, введенная в действие система, таким образом, включает в себя активацию окна, в течение которого наклон дополнительно обрабатывается посредством расчета общей длины сегмента в окне. В качестве альтернативы, если контроллер 12 определяет, что точное измерение посредством системы NOx не возможно на основании определенных условий, система управления может деактивировать вычислительную систему, чтобы дальнейшая обработка сигналов не происходила после обнаружения сигнала.
Продолжая описание способа, на этапе 914, способ 900 включает в себя расчет общей длины сегмента в пределах скользящего окна как для реальной, так и спрогнозированной траекторий сигнала NOx. Как уже отмечено, размер окна может регулироваться посредством регулировки одного или более из постоянной времени и модификатора постоянной времени, которые включены в модуль обработки контроллера. В дополнение, процессор также может быть выполнен с возможностью автоматически рассчитывать размер окна на основании условий работы. Таким образом, в качестве одного из примеров, когда определен сигнал с более высокими уровнями шума, например, так как температура в системе выпуска выхлопных газов является низкой после холодного запуска, меньший или больший размер окна может использоваться на основании шума в определенном сигнале. Контроллер 12 также может быть выполнен с возможностью автоматически определять количество измерительных точек для включения в расчет длины сегмента в пределах каждого окна. Таким образом, общая длина сегмента сигнала, имеющего повышенный шум, может определяться точнее посредством повышения разрешения анализатора включением в состав повышенных количеств измерительных точек в пределах расчета. Таким образом, сигнал может дискретизироваться мельче, а потому, сигнал точнее аппроксимируется для повышения точности определения длины сегмента в окне на основании определенных условий работы.
На этапе 916, способ 900 дополнительно включает в себя сравнение реальной и спрогнозированной траекторий сигнала NOx посредством вычисления соотношений длин сегментов, рассчитанных в пределах скользящего окна. Как отмечено выше, низкое соотношение траекторий указывает более низкий уровень NOx, чем ожидается на основании находящегося выше по потоку датчика NOx, который указывает, что уменьшенное количество NOx присутствует в системе выпуска выхлопных газов по сравнению с ожидаемым количеством. По этой причине, раскрытое соотношение указывает более низкое количество NOx, когда измеренный NOx падает ниже ожидаемого NOx в местоположении ниже по потоку от SCR, что дополнительно дает указание, что аммиак присутствует в системе выпуска выхлопных газов.
На этапе 920, способ 900 включает в себя определение, находится ли соотношение сравниваемых сигналов выше порогового значения, чтобы дополнительно определять, эксплуатируется ли система выпуска выхлопных газов в условиях просачивания NOx или NH3. Если определенное соотношение превышает пороговое значение NOx, на этапе 922, способ 900 включает в себя отнесение выходного сигнала находящегося ниже по потоку датчика к NOx. Хотя отнесение описано в материалах настоящего описания в качестве принадлежащего одному из NOx или NH3, в других вариантах осуществления, первая часть выходного сигнала датчика NOx может быть отнесена к NOx наряду с тем, что вторая, оставшаяся часть выходного сигнала датчика NOx относится к NH3. Более того, двигатель может осуществлять одну или более регулировок на основании отнесения, например, посредством регулировки подачи восстановителя на основании каждой из первой и второй частей, с разными регулировками для первой части по сравнению с второй частью. На этапе 924, контроллер 12 может устанавливать флажковый признак, чтобы указывать условия просачивания NOx в системе выпуска выхлопных газов.
Возвращаясь на вершину 920 блок-схемы, если определенное соотношение взамен падает ниже порогового значения NOx, на этапе 930, способ 900 включает в себя отнесение выходного сигнала находящегося ниже по потоку датчика к NH3. Например, величина, на которую должны регулироваться рабочие параметры, может быть основана на температуре каталитического нейтрализатора с SCR, так как точка насыщения мочевиной каталитического нейтрализатора меняется в зависимости от температуры. Таким образом, когда температура каталитического нейтрализатора является относительно более высокой температурой, величина EGR может уменьшаться в меньшей степени, и/или величина впрыска мочевины может уменьшаться на меньшую величину. В противоположность, когда температура каталитического нейтрализатора является относительно более низкой температурой, величина EGR может увеличиваться в большей степени, и/или величина впрыска мочевины может уменьшаться на большую величину. В других примерах, может только уменьшаться величина EGR, или может только увеличиваться количество мочевины, впрыскиваемой в катализатор с SCR. В кроме того других примерах, один или более рабочих параметров могут регулироваться дополнительно или в качестве альтернативы. По существу, один или более рабочих параметров могут регулироваться, чтобы уменьшать просачивание NH3. На этапе 932, контроллер 12 может быть запрограммирован устанавливать флажковый признак для указания условий просачивания NH3 в системе выпуска выхлопных газов на основании соотношения относительно порогового значения. Таким образом, описанные методы длины сегмента предоставляют возможность для повышенной чувствительности сигнала с высокой степенью точности, в частности, при низких температурах выхлопных газов, что предоставляет возможность для улучшенной обработки сигналов во время слабо нагруженных циклов.
Хотя методы длины сегмента и огибающей описаны в материалах настоящего описания для простоты независимо, в некоторых вариантах осуществления, двигатель 10 может быть выполнен с возможностью использовать оба подхода во время ездового цикла двигателя. По этой причине, фиг. 10 показывает блок-схему, иллюстрирующую процедуру 1000 для работы системы управления в разных режимах обработки согласно раскрытым способам, чтобы относить выходной сигнал датчика выхлопных газов к NOx и аммиак. Например, в некоторых условиях, контроллер 12 может быть запрограммирован, чтобы обрабатывать переходные сигналы NOx посредством метода огибающей наряду с тем, что, в других условиях, контроллер 12, в качестве альтернативы, обрабатывает переходные сигналы NOx с использованием метода длины сегмента. В качестве одного из примеров, контроллер 12 преимущественно может использовать метод длины сегмента по фиг. 6-8 для повышения чувствительности обработки и, таким образом, более точного определения состава выхлопных газов в выхлопной трубе, когда транспортное средство эксплуатируется при более низких температурах выхлопных газов, например, когда температура каталитического нейтрализатора с SCR падает ниже порогового значения температуры (Texhaust<250°C). Затем, как только двигатель поработал некоторое время, так что двигатель прогревается и побуждает температуру каталитического нейтрализатора с SCR подниматься выше порогового значения температуры (Texhaust>250°C), двигатель 10 может регулировать обработку сигналов, чтобы использовать метод огибающей, описанный со ссылкой на фиг. 2, который преимущественно предоставляет возможность для повышенной скорости обработки в некоторых случаях. Таким образом, метод длины сегмента может использоваться при первом наборе условий работы наряду с тем, что метод огибающей используется при втором наборе условий работы. Кроме того, можно использовать оба способа одновременно наряду с обработкой переходных сигналов во время ездового цикла двигателя.
На этапе 1002, определяются условия работы. Как описано выше, условия работы могут включать в себя условия работы двигателя (например, скорость вращения двигателя, нагрузку двигателя, величину EGR, отношение количества воздуха к количеству топлива, и т.д.) и условия системы очистки выхлопных газов (например, температуру выхлопных газов, температуру каталитического нейтрализатора с SCR, величину впрыска мочевины, и т.д.). Затем, на этапе 1010, контроллер 12 дополнительно может определять, эксплуатируется ли двигатель при первом наборе условий, как отмечено выше. Если контроллер 12 определяет, что двигатель 10 эксплуатируется при первом наборе условий, то, на этапе 1020, контроллер 12 может осуществлять регулировки для работы системы управления в первом режиме, в котором выходной сигнал датчика NOx определяется посредством метода длины сегмента. В качестве альтернативы, если двигатель определяет, что двигатель не эксплуатируется при первом наборе условий, например, так как двигатель 10 эксплуатируется при втором наборе условий, то, на этапе 1030, контроллер 12 может осуществлять регулировки для работы системы управления во втором режиме, чтобы относить выходной сигнал датчика посредством уже описанного метода огибающей. Таким образом, раскрытая система двигателя может быть дополнительно выполнена с возможностью использовать один или более описанных способов более эффективной работы системы двигателя во время работы.
По этой причине, в некоторых вариантах осуществления, раскрытая система, таким образом, содержит двигатель с системой выпуска; систему очистки выхлопных газов, расположенную в системе выпуска и включающую в себя устройство SCR выхлопных газов, форсунку для мочевины, расположенную выше по потоку от устройства SCR выхлопных газов, и датчик выхлопных газов, расположенный ниже по потоку от устройства SCR выхлопных газов; и систему управления в соединении с датчиком выхлопных газов, система управления включает в себя постоянные команды для определения просачивания NH3 на основании переходного сигнала NOx, при этом определение просачивания NH3 включает в себя отнесение выходного сигнала датчика к каждому из NH3 и NOx, и регулировку одного или более рабочих параметров на основании отнесения, отнесение дополнительно основано на сравнении ожидаемой скорости изменения NOx и измеренной скорости изменения NOx в местоположении ниже по потоку от устройства SCR выхлопных газов, и уровня NOx в местоположении выше по потоку от устройства SCR выхлопных газов, система управления дополнительно является выполненной с возможностью работы в двух рабочих режимах для определения отнесения, при этом два режима включают в себя первый режим, эксплуатируемый при первом наборе условий, который обрабатывает переходные сигналы NOx на основании длину сегмента переходного сигнала NOx, и второй режим, эксплуатируемый при втором наборе условий, который обрабатывает переходные сигналы NOx на основании отнесения большей величины выходного сигнала датчика NOx к NOx, чем на аммиак, когда измеренная скорость изменения NOx в местоположении ниже по потоку находится в пределах ожидаемой огибающей, основанной на уровне NOx в местоположении выше по потоку.
Следует отметить, что примерные процедуры управления и оценки, включенные в материалы настоящего описания, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Специфичные процедуры, описанные в материалах настоящего описания, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия могут графически представлять код, который должен быть запрограммирован на машиночитаемый запоминающий носитель в системе управления двигателем.
Это завершает описание. Прочтение его специалистами в данной области техники напомнило бы многие изменения и модификации, не выходя из сущности и объема описания. Например, рядные двигатели I3, I4, I5, V-образные двигатели V6, V8, V10 и V12, работающие на природном газе, бензине, дизельном топливе или альтернативных топливных конфигурациях, могли бы использовать настоящее описание для получения преимущества.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы изобретения могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке.
Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается в качестве включенной в предмет изобретения настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПРОСКОКА АММИАКА В СИСТЕМЕ ОЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2627872C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ БЕНЗИНОВОГО ДВИГАТЕЛЯ ОБЕДНЕННОГО СГОРАНИЯ | 2013 |
|
RU2643275C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2632068C2 |
| СПОСОБЫ РАБОТЫ ДВИГАТЕЛЯ | 2013 |
|
RU2625605C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИРОВАНИЯ КОМПОНЕНТОВ СИСТЕМЫ ДООЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2665603C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УХУДШЕНИЯ РАБОТЫ ДАТЧИКА NOx ВЫХЛОПНЫХ ГАЗОВ ДВИГАТЕЛЯ | 2014 |
|
RU2607987C2 |
| СПОСОБЫ СНИЖЕНИЯ ТОКСИЧНОСТИ ВЫХЛОПНЫХ ГАЗОВ (ВАРИАНТЫ) | 2015 |
|
RU2665193C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ С СИСТЕМОЙ РЕЦИРКУЛЯЦИИ ВЫХЛОПНЫХ ГАЗОВ (ВАРИАНТЫ) | 2014 |
|
RU2647181C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2013 |
|
RU2626879C2 |
| СПОСОБ ДЛЯ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ С КАТАЛИТИЧЕСКИМ НЕЙТРАЛИЗАТОРОМ С ИЗБИРАТЕЛЬНЫМ КАТАЛИТИЧЕСКИМ ВОССТАНОВЛЕНИЕМ (ВАРИАНТЫ) | 2014 |
|
RU2651392C2 |
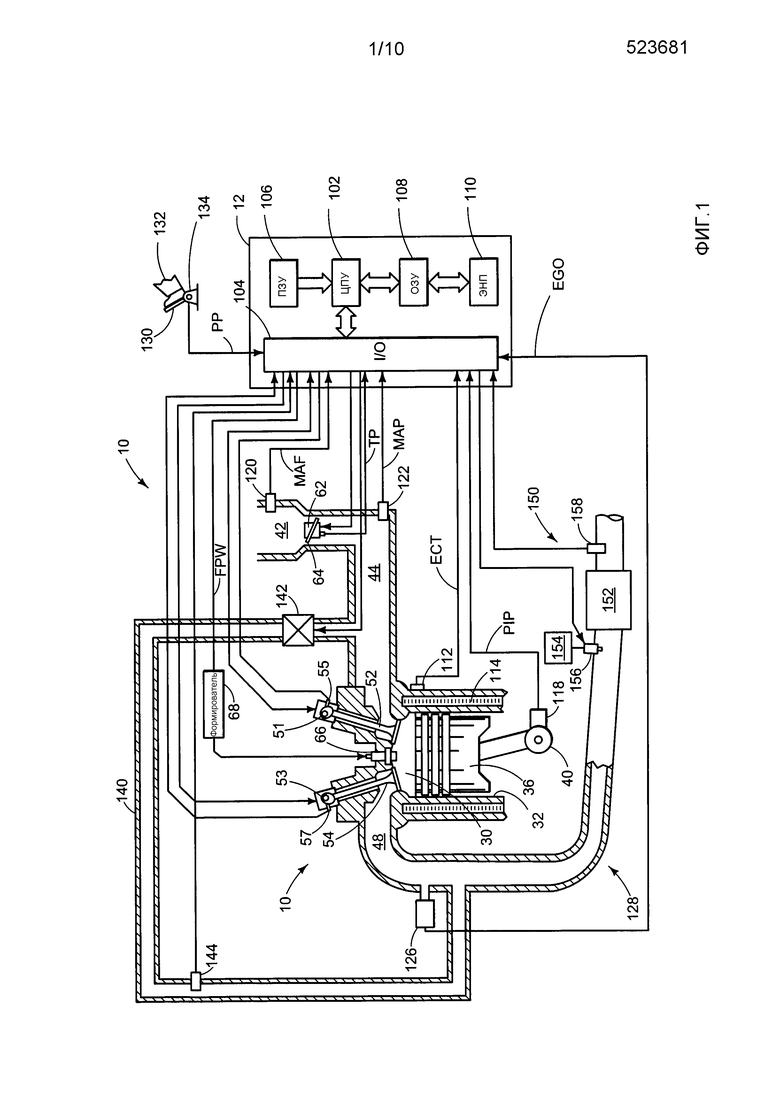
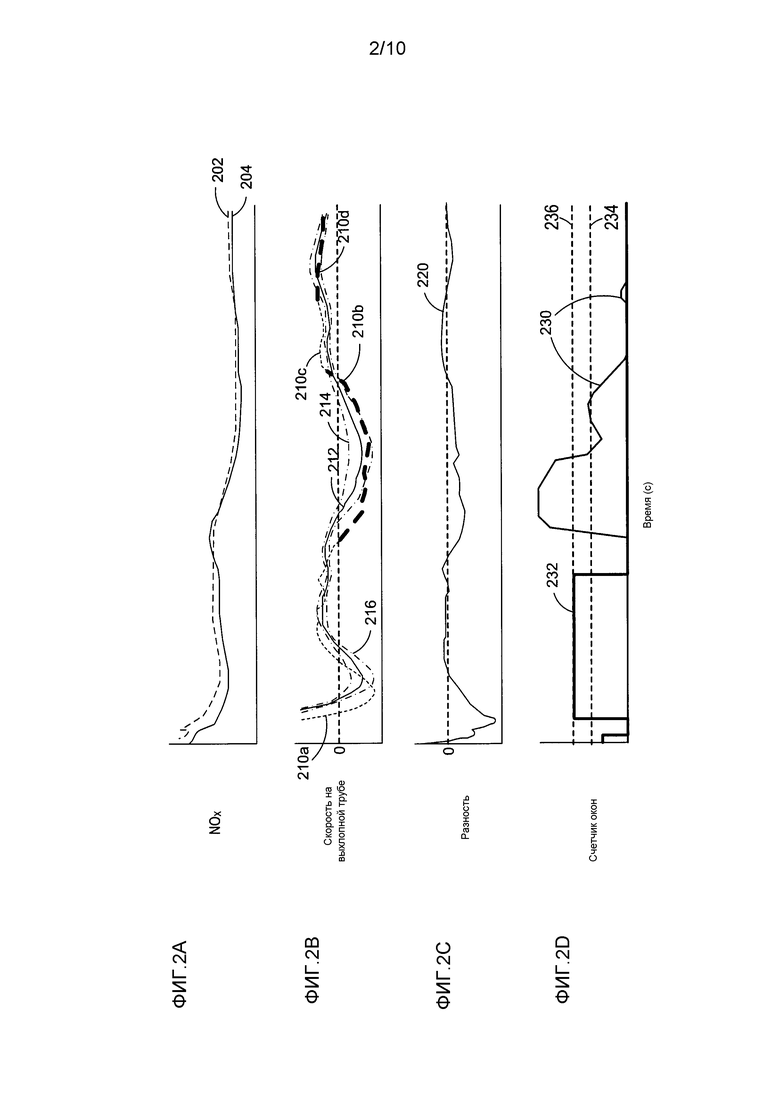
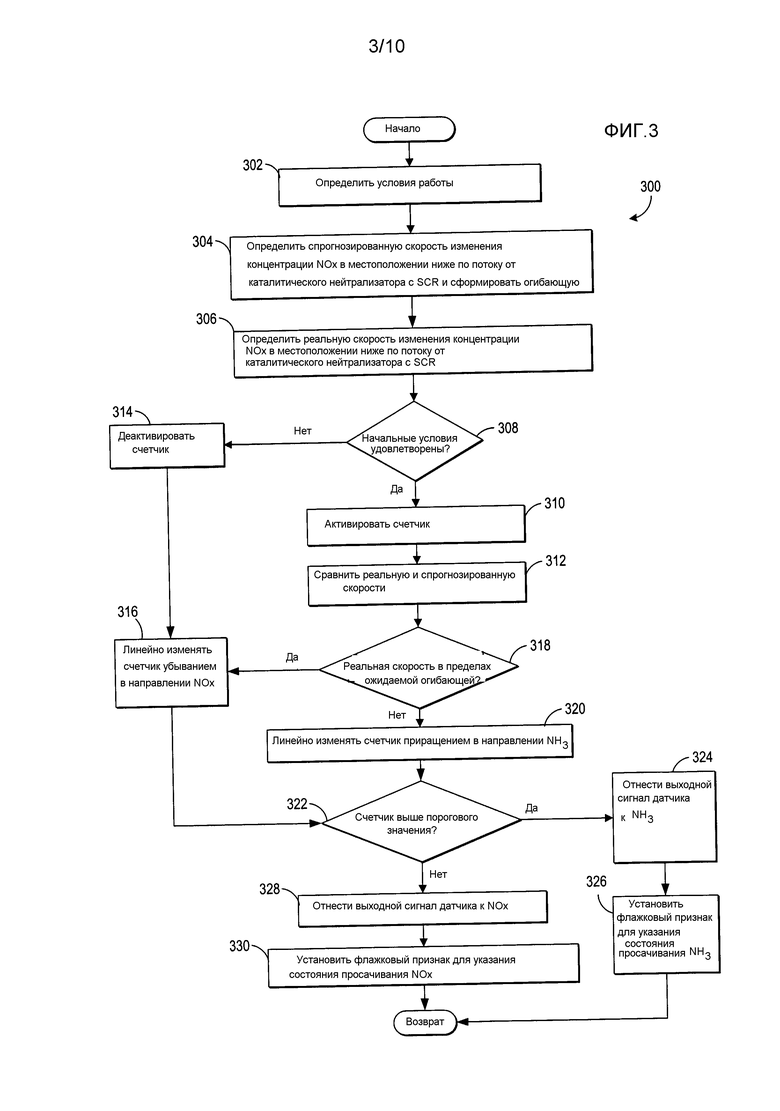
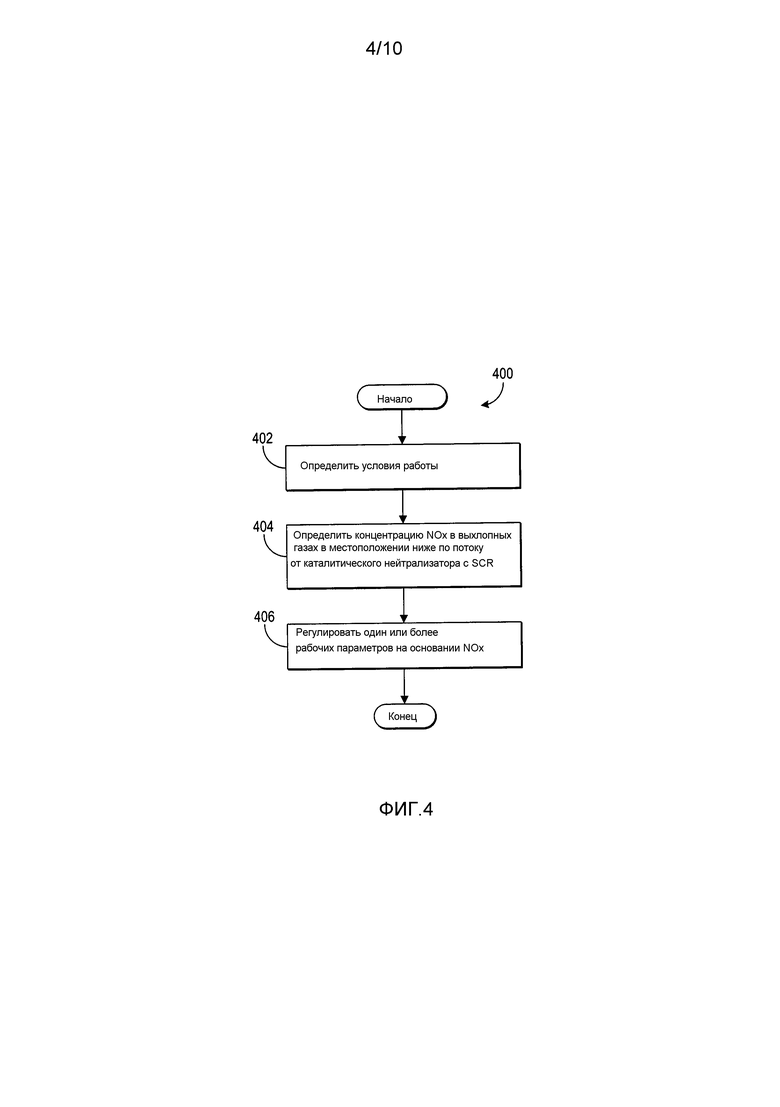
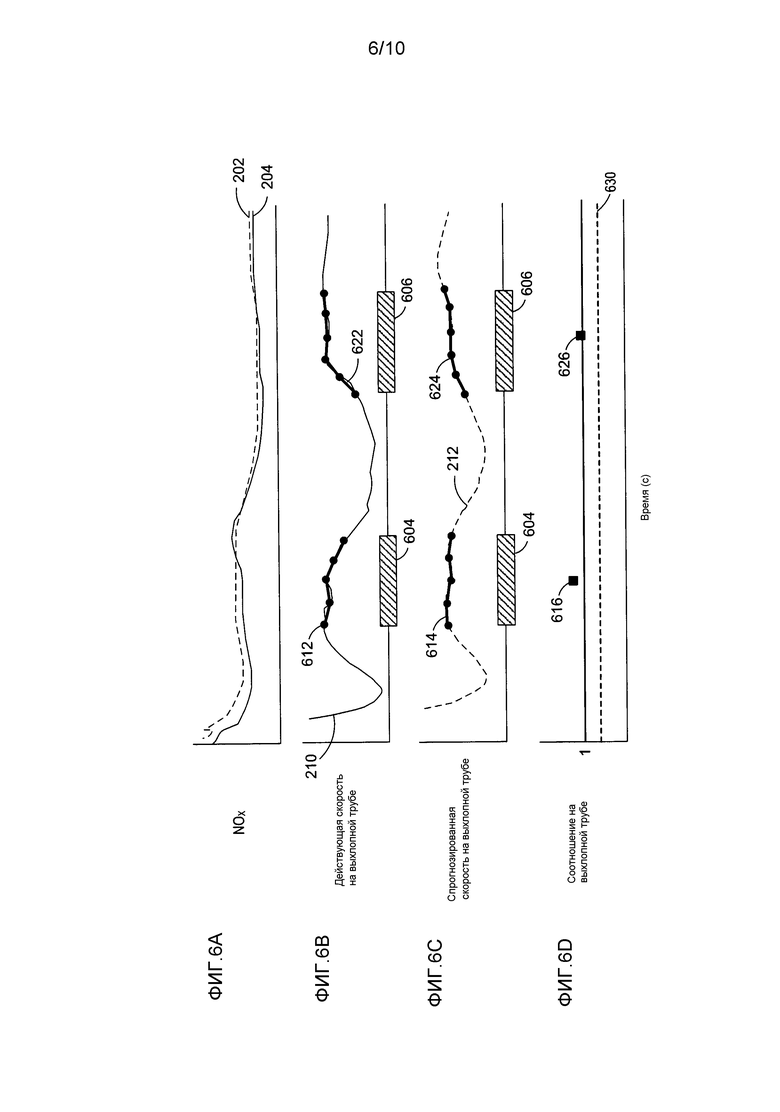
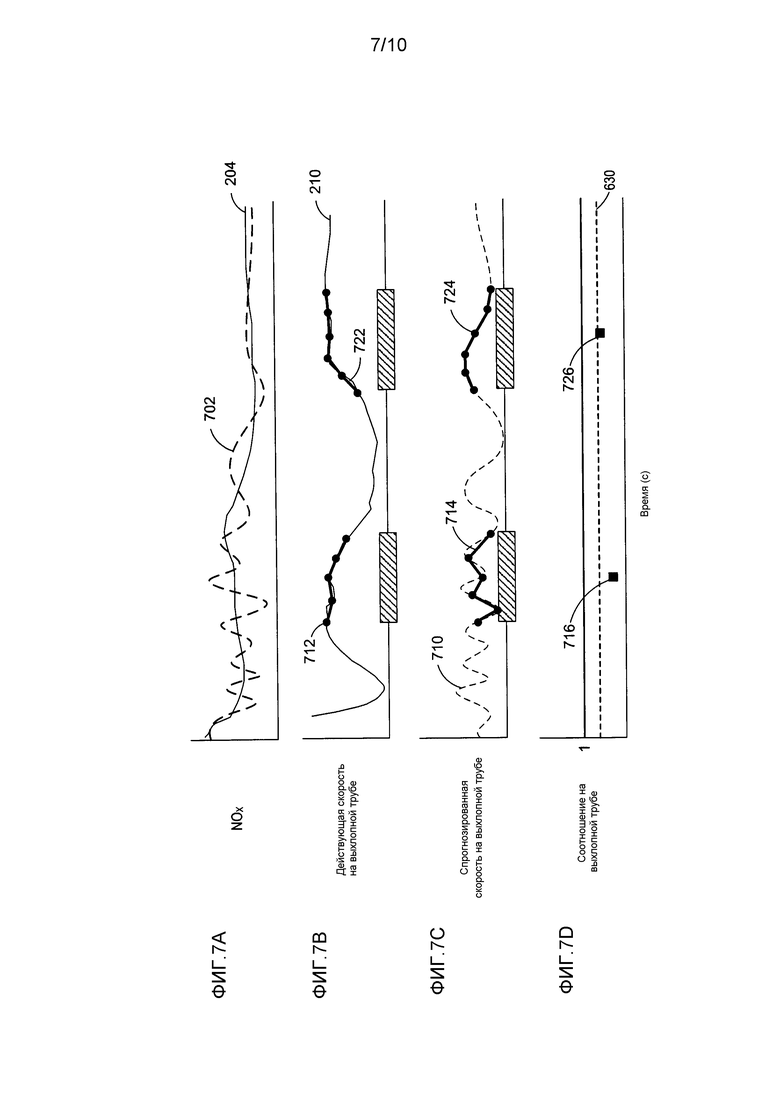
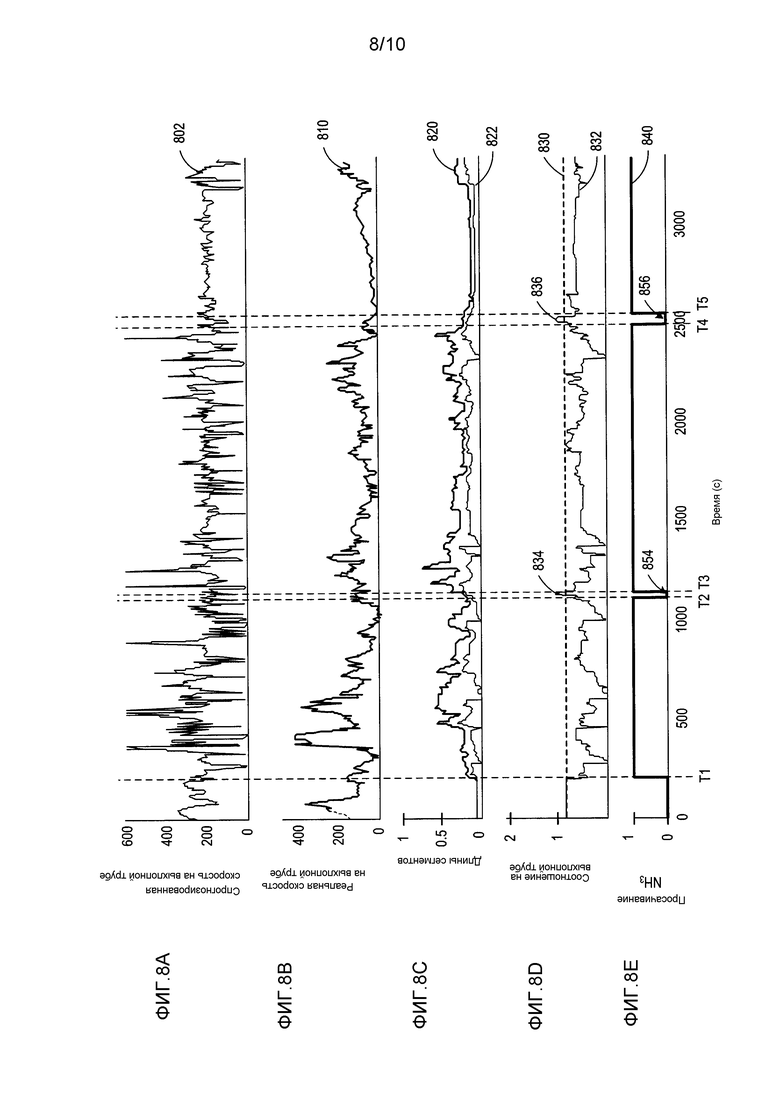
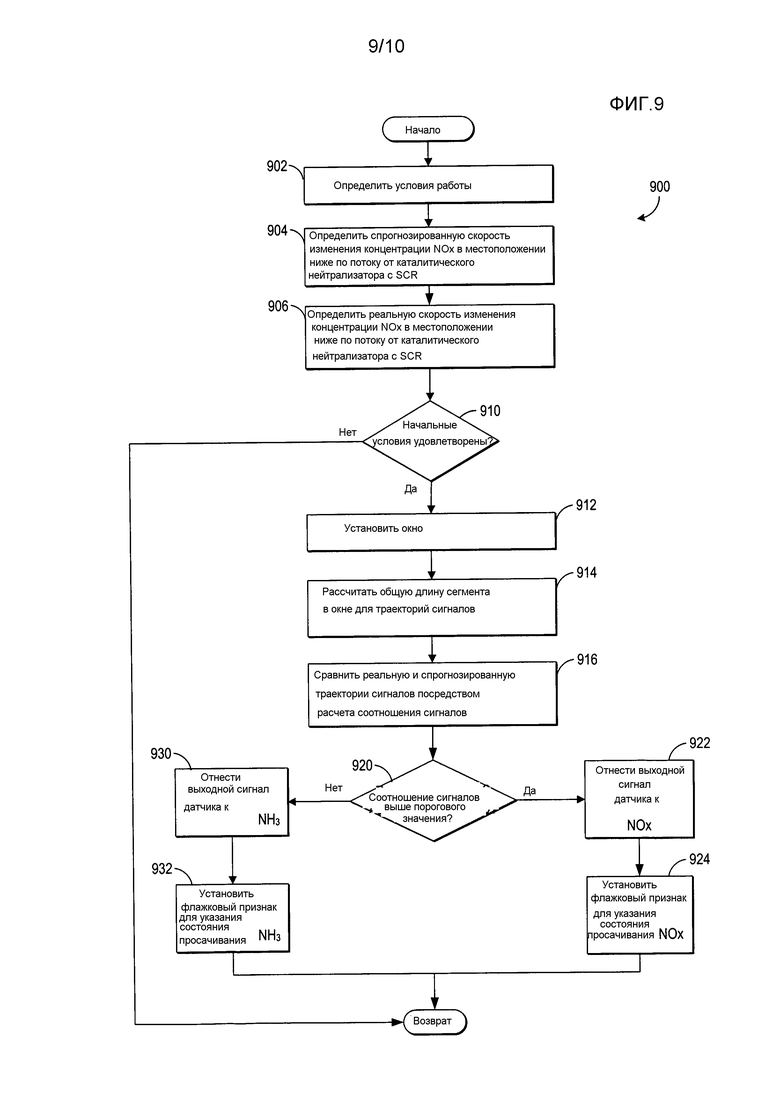
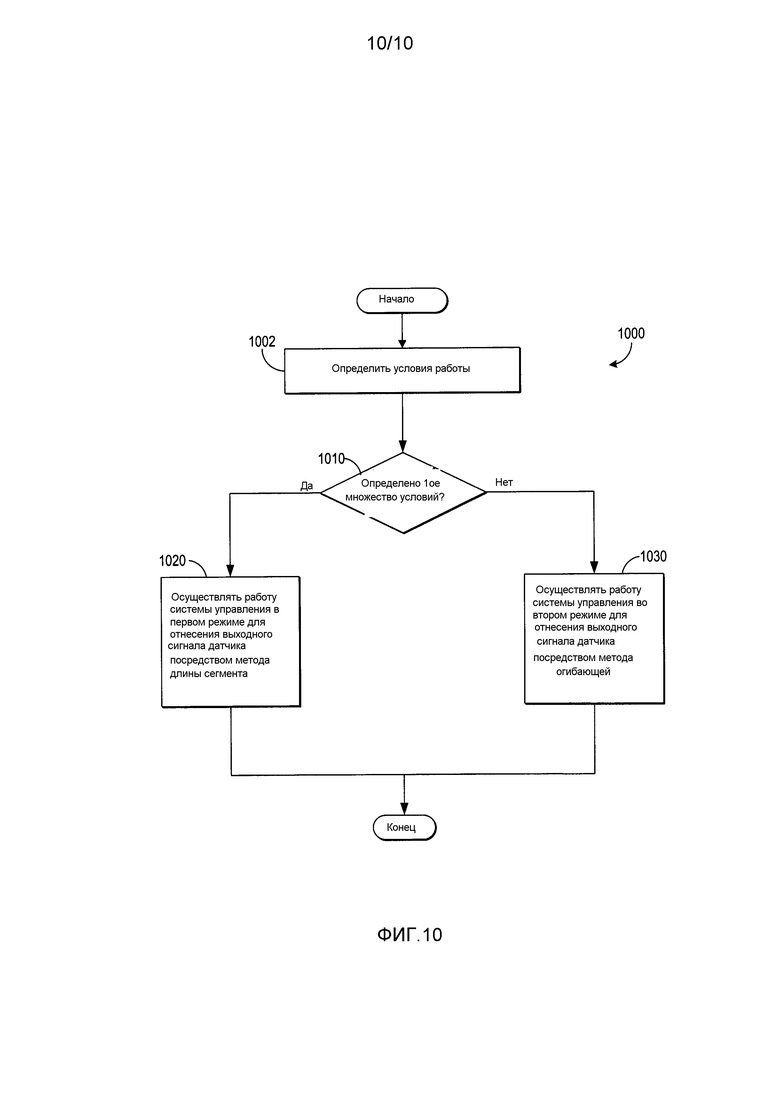
Изобретение может быть использовано в двигателях внутреннего сгорания. Способ для двигателя (10) заключается в том, что относят выходной сигнал датчика (126), (158) NOx к каждому из NH3 и NOx на основании скорости изменения NOx в местоположении выше по потоку и скорости изменения NOx в местоположении ниже по потоку относительно устройства (152) избирательного каталитического восстановления (SCR) выхлопных газов. Отнесение основано на длине сегмента определяемого переходного сигнала. Регулируют впрыск восстановителя в выпуск двигателя посредством форсунки (156) на основании отнесения. Длину сегмента определяемого переходного сигнала рассчитывают в окне, применяемом при заданном множестве условий. Отнесение дополнительно включает в себя этап, на котором многократно перемещают окно вдоль определяемого переходного сигнала. Размер окна является регулируемым по одному или более из постоянной времени и модификатора постоянной времени. Раскрыты вариант способа для двигателя и система двигателя. Технический результат заключается в повышении точности определения оценки просачивания NH3 и эффективности нейтрализации NOx. 3 н. и 15 з.п. ф-лы, 23 ил.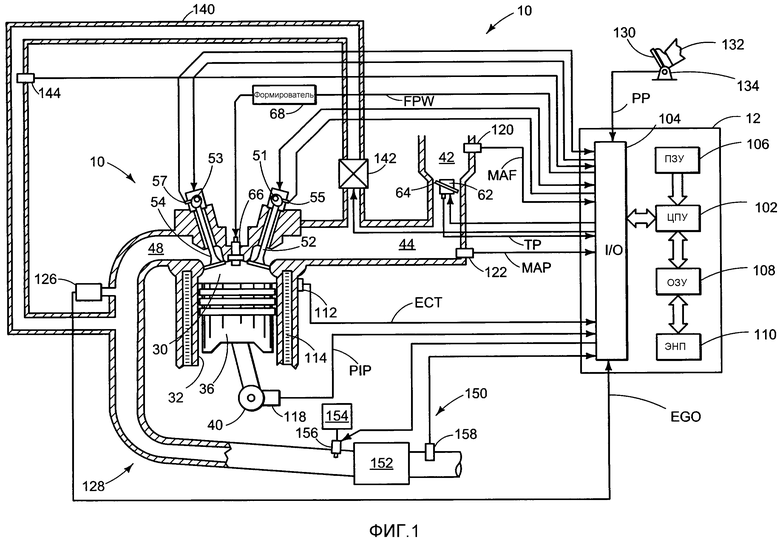
1. Способ для двигателя, включающий в себя этапы, на которых:
относят выходной сигнал датчика NOx к каждому из NH3 и NOx на основании скорости изменения NOx в местоположении выше по потоку и скорости изменения NOx в местоположении ниже по потоку относительно устройства избирательного каталитического восстановления (SCR) выхлопных газов, причем отнесение основано на длине сегмента определяемого переходного сигнала; и
регулируют впрыск восстановителя в выпуск двигателя посредством форсунки на основании отнесения, причем длину сегмента определяемого переходного сигнала рассчитывают в окне, применяемом при заданном множестве условий, причем отнесение дополнительно включает в себя этап, на котором многократно перемещают окно вдоль определяемого переходного сигнала, при этом размер окна является регулируемым по одному или более из постоянной времени и модификатора постоянной времени.
2. Способ по п. 1, в котором расчет длины сегмента в окне включает в себя этап, на котором формируют траекторию сигнала для аппроксимации определяемого переходного сигнала, причем рассчитанная длина сегмента основана на траектории сигнала, которая аппроксимирует определяемый переходный сигнал.
3. Способ по п. 2, в котором относят большую величину выходного сигнала датчика NOx к NOx, чем к NH3, когда соотношение измеренной ниже по потоку траектории сигнала NOx, которая аппроксимирует измеренную ниже по потоку скорость изменения, больше, чем пороговое значение относительно ожидаемой траектории сигнала NOx в местоположении ниже по потоку, которая аппроксимирует ожидаемую скорость изменения NOx в местоположении ниже по потоку.
4. Способ по п. 3, в котором ожидаемая ниже по потоку скорость изменения NOx основана на скорости изменения NOx в местоположении выше по потоку.
5. Способ по п. 4, в котором скорость изменения NOx в местоположении выше по потоку определяют посредством по меньшей мере одного из датчика и модели.
6. Способ по п. 5, в котором относят большую величину выходного сигнала датчика NOx к NH3, чем к NOx, когда соотношение траекторий сигналов падает ниже порогового значения, причем соотношение ниже порогового значения указывает высокую вероятность NH3, присутствующего в выпуске двигателя.
7. Способ по п. 6, в котором отнесение включает в себя этап, на котором относят первую часть выходного сигнала датчика NOx к NOx, а вторую, оставшуюся часть выходного сигнала датчика NOx к NH3, при этом подача восстановителя основана на каждой из первой и второй частей, с разными регулировками для первой части по сравнению со второй частью.
8. Способ по п. 7, для которого дополнительно включен в состав счетчик, который линейно убывает до нижнего уровня, указывающего просачивание NH3, когда соотношение траекторий сигналов падает ниже порогового значения, и линейно возрастает до верхнего уровня, указывающего просачивание NOx, когда соотношение превышает пороговое значение.
9. Способ по п. 8, в котором отнесение основано на счетчике относительно нижнего уровня и верхнего уровня.
10. Способ по п. 9, в котором один или более рабочих параметров регулируют на основании отнесения.
11. Способ по п. 10, для которого контроллер содержит постоянные команды для осуществления способа.
12. Способ для двигателя, включающий в себя этапы, на которых:
управляют в реальном времени просачиванием аммиака в системе выпуска двигателя на основании отнесения выходного сигнала датчика NOx к каждому из NH3 и NOx, основанного на скорости изменения NOx в местоположении выше по потоку от устройства SCR выхлопных газов и скорости изменения NOx в местоположении ниже по потоку от устройства SCR выхлопных газов, причем отнесение основано на длине сегмента переходных сигналов NOx; и
регулируют подачу восстановителя посредством форсунки в выпуск двигателя на основании отнесения, причем отнесение основано на сравнении ожидаемой скорости изменения NOx в местоположении ниже по потоку и измеренной скорости изменения NOx в местоположении ниже по потоку, причем ожидаемая скорость изменения NOx в местоположении ниже по потоку основана на скорости изменения NOx в местоположении выше по потоку, определяемой посредством по меньшей мере одного из датчика и модели, а сравнение дополнительно основано на длине сегмента переходных сигналов NOx.
13. Способ по п. 12, в котором сравнение дополнительно основано на соотношении длины сегмента, определяемой для измеренной скорости изменения NOx в местоположении ниже по потоку, и длины сегмента, определяемой для ожидаемой скорости изменения NOx в местоположении ниже по потоку.
14. Способ по п. 13, в котором отнесение выходного сигнала датчика NOx к каждому из NH3 и NOx основано на соотношении определяемых длин сегментов для измеренной и ожидаемой скорости изменения NOx.
15. Способ по п. 14, в котором по меньшей мере часть выходного сигнала датчика NOx относят к NH3, когда соотношение определяемых длин сегментов для измеренной и ожидаемой скорости изменения NOx падает ниже порогового значения, которое указывает наличие NH3.
16. Способ по п. 15, в котором пороговое значение, указывающее наличие NH3, составляет 1,0.
17. Способ по п. 16, в котором один или более рабочих параметров регулируют на основании отнесения.
18. Система, содержащая:
двигатель с системой выпуска;
систему очистки выхлопных газов, расположенную в системе выпуска и включающую в себя устройство избирательного каталитического восстановления выхлопных газов, форсунку для мочевины, расположенную выше по потоку от устройства избирательного каталитического восстановления выхлопных газов, и датчик выхлопных газов, расположенный ниже по потоку от устройства избирательного каталитического восстановления выхлопных газов; и
систему управления в соединении с датчиком выхлопных газов, причем система управления содержит постоянные команды для определения просачивания NH3 на основании переходного сигнала NOx, при этом определение просачивания NH3 включает в себя отнесение выходного сигнала датчика к каждому из NH3 и NOx, и регулировку одного или более рабочих параметров, включая впрыск восстановителя посредством форсунки для мочевины, на основании отнесения, при этом отнесение дополнительно основано на сравнении ожидаемой скорости изменения NOx и измеренной скорости изменения NOx в местоположении ниже по потоку от устройства избирательного каталитического восстановления выхлопных газов, и уровня NOx в местоположении выше по потоку от устройства избирательного каталитического восстановления выхлопных газов, причем система управления дополнительно выполнена с возможностью работы в двух рабочих режимах для определения отнесения, при этом два режима включают в себя:
первый режим, осуществляемый при первом наборе условий, который обрабатывает переходные сигналы NOx на основании длины сегмента переходного сигнала NOx, и
второй режим, осуществляемый при втором наборе условий, который обрабатывает переходные сигналы NOx на основании отнесения большей величины выходного сигнала датчика NOx к NOx, чем на аммиак, когда измеренная скорость изменения NOx в местоположении ниже по потоку находится в пределах ожидаемой огибающей, основанной на уровне NOx в местоположении выше по потоку.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, ЭЛЕМЕНТ УПРАВЛЕНИЯ ДЛЯ БЛОКА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ, БЛОК УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2261340C2 |

